
施工補助装置、施工補助方法
【課題】建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【解決手段】施工補助装置は、施工対象物100の画像に基づいて、施工対象物100の所定領域の面積を算出する面積算出手段と、施工対象物100の周辺情報を記憶する第1記憶部と、施工対象物100の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する算出手段と、を備える。
【解決手段】施工補助装置は、施工対象物100の画像に基づいて、施工対象物100の所定領域の面積を算出する面積算出手段と、施工対象物100の周辺情報を記憶する第1記憶部と、施工対象物100の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する算出手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、建築、看板、施工業務など幅広く施工を必要とする業務分野において、デザインや建築物を施工するに当たって必要となるコスト、材料、素材などの要素を簡単に見積もることのできる施工補助装置、施工補助方法に関する。
【背景技術】
【0002】
建物や建造物の壁面におけるデザイン設置場所に、塗装を施したり看板やポスターを設置(すなわちデザインを施す)したりする際に、予めこれらの建物や建造物の壁面の面積が算出されていることが好ましい。壁面の面積が不明であると、どの程度の塗料や材料が必要となるのか、どの程度の面積の看板やポスターを設置できるのか不明であるからである。壁面の面積が予め分かっている場合には、塗装を施したり、看板やポスターを設置したりする工事の効率が向上する。
また、壁面における看板やポスターのみならず、住宅、ビル、工場、商業施設などの建築物を施工する際や、廃棄用建築物を解体したりする場合にも、対象となる建築物のある面の面積(複数の面の面積から概算される体積)が、事前に分かっていることは、施工における見積精度が向上する。
【0003】
設置場所に施すデザインの構成要素(最適な原画、面積、必要となる塗料量、コスト、色度、輝度など)を、早期に予測することは、設置場所にデザインを製作する場合に重要である。屋外の設置場所にデザインを製作する場合にデザインの構成要素が不明であると、作業中に必要な材料が不足したり、余分な材料が余ったりしてコスト面での問題が生じうる。あるいは、製作したデザインが、設置場所の周辺環境や方角によって、十分なデザイン効果を発揮できない問題も生じる。
【0004】
このように、屋外の設置場所にデザインを施す場合には、設置場所の面積、最適な原画、必要となる塗料量、コストなどのデザインの構成要素を、デザインを施す前に把握できることが重要である。特に、設置場所における測量などの大掛かりな作業によらずこれらの構成要素を予め推定できることが必要である。
【0005】
同様に、種々の建築物を施工したり建築物を解体したりする場合には、予め必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさが、予め分かっていることが好適である。実際の施工や解体作業に入ってから、見積と異なるコストが掛かってしまったり、必要な材料が不足したりすることが生じるのは、好ましいことではない。デザインや看板の設置に限らず、建築物の施工や解体においても、必要となる作業量やコストなどについての高い精度での事前予測ができることが好ましい。特に、近年では、コストや施工期間に対する要求が厳しくなっており、種々の要素について、事前に高い精度で見積もることが重要となっている。
【0006】
このように、建築、看板、施工業務など幅広くデザインや施工、建築施工、解体などにおいては、必要となる種々の要素が事前予測できることが重要であり、このためには、施工対象領域の面積(面積に基づく体積)を、簡単かつ高い精度で算出できることが必要となってきている。
【0007】
このような状況において、屋外の施工対象領域の面積を算出するには、危険な作業に基づいて実測を行うか、基準点測量やステレオカメラによる測量を行うのが一般的であった。
【0008】
しかしながら、実測による測量は、危険を伴う上に、対象となる領域が変更になってしまうと、改めて実測による測量作業を必要とする不便を有する。基準点測量やステレオカメラによる作業は、作業時間や作業工数が多くなる上に、測量対象となる建物や建造物を目視できる現場での作業しかできない。
【0009】
これらの現場での作業は、危険度も高く、作業工数も多くなる。例えば、建築物の解体を行うための、作業量、作業機器、コストを見積もるために、解体業者は、様々な現場に何度も熟練作業者を派遣する必要がある。これらの熟練作業者の派遣による業務は見積だけであり、見積後に当該業務を受任できるとは限らない。建築や看板施工でも同様である。コスト削減や期間短縮の要求が高まる中、見積コストを抑えたい欲求もある。
【0010】
このように、実際の施工現場に熟練作業者を派遣して、危険と隣り合わせで施工領域の面積や体積を測定することを減少したい要求が強まっている。このような状況において、撮像装置で撮像された画像を用いて、建物や建造物の壁面を計測する技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−147522号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1は、複数の角度から撮像された画像に含まれる被写体の視差を、調整する技術を開示するだけである。
【0013】
このため、特許文献1は、被写体の面積を算出する技術を開示していない。また、特許文献1の標定基準体は、被写体の位置と面積を算出することに適用が難しい。特に、種々の角度から撮像された画像に含まれる標定基準体の任意の点を、高い精度で識別することが困難であり、事後的に撮像された画像を用いて、被写体の面積算出に必要となるデータを得ることが困難である。撮像された写真の角度や位置によっては、標定基準体の写り方が大きく異なって、標定基準体と被写体との関連性を得ることが難しいからである。
【0014】
また、従来技術は、被写体の面積を十分に算出できないだけでなく、設置場所に最適なデザインを製作するためのデザインの構成要素を算出することができない。この結果、設置場所において実際にデザインを製作する以前に、デザイン製作を効率化するための準備ができない問題がある。特に、デザインオフィスなどの設置場所と離隔した場所にてデザイン製作を効率化する準備が行えない問題がある。
【0015】
本発明は、上記課題に鑑み、建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【課題を解決するための手段】
【0016】
上記課題に鑑み、本発明の施工補助装置は、施工対象物の画像に基づいて、施工対象物の所定領域の面積を算出する面積算出手段と、施工対象物の周辺情報を記憶する第1記憶部と、施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物の施工特性を算出する算出手段と、を備える。
【発明の効果】
【0017】
本発明の施工補助装置は、施工現場における施工対象物を施工したり解体したりする際に必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、機器の種類および大きさの少なくとも一つを含む、施工要素を推測できる。特に、施工補助装置は、施工対象物や施工領域の面積を高い精度で算出できるので、高い精度で施工要素を推測できる。
【0018】
また、施工補助装置は、施工現場における施工対象物や施工領域の写真に基づくだけで、施工対象物や施工領域の面積を算出すると共に、施工要素を推測できるので、現場作業の負担が大幅に減少する。この結果、施工や解体に伴う、施工要素の見積に必要な時間やコストが低減する。
【0019】
また、写真に基づくだけで、施工要素を推測できるので、作業の危険性も低くなり、施工や解体などの業務能力が高まる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施の形態1における施工対象物の模式図である。
【図2】本発明の実施の形態1における施工補助装置のブロック図である。
【図3】本発明の実施の形態2における施工補助装置のブロック図である。
【図4】本発明の実施の形態2における撮像画像に基づく面積算出を示す概念図である。
【図5】本発明の実施の形態2における第1画像と第2画像との撮像を説明する模式図である。
【図6】実施の形態2における面積算出手段の内部ブロック図である。
【図7】本発明の実施の形態2における第1画像と第2画像の写真例である。
【図8】本発明の実施の形態2における標識の正面図である。
【図9】本発明の実施の形態2における撮像装置の方向推定の模式図である。
【図10】本発明の実施の形態2における撮像装置と標識との距離の推定を説明する模式図である。
【図11】本発明の実施の形態3における特定点座標の推定を説明する写真である。
【図12】本発明の実施の形態2における特定点の3次元座標の推定を説明する模式図である。
【図13】本発明の実施の形態3におけるコンピュータのブロック図である。
【発明を実施するための形態】
【0021】
本発明の第1の発明に係る施工補助装置は、施工対象物の画像に基づいて、施工対象物の所定領域の面積を算出する面積算出手段と、施工対象物の周辺情報を記憶する第1記憶部と、施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物の施工特性を算出する算出手段と、を備える。
【0022】
この構成により、施工補助装置は、施工対象物の画像に基づくことで、容易に施工対象物の施工に必要となる施工特性を算出できる。
【0023】
本発明の第2の発明に係る施工補助装置では、第1の発明に加えて、施工対象物は、施工建築物、解体建築物、看板、壁面デザイン、施工外壁および庭園の少なくとも一つを含む。
【0024】
この構成により、施工補助装置は、様々な施工対象物の施工特性を見積もることができる。
【0025】
本発明の第3の発明に係る施工補助装置では、第1又は第2の発明に加えて、施工要素は、施工対象物に基づく素材、工数、期間およびコストの少なくとも一つの単位を含む。
【0026】
この構成により、施工補助装置は、施工特性に関連する施工要素を用いることができる。
【0027】
本発明の第4の発明に係る施工補助装置では、第3の発明に加えて、素材は、建築素材、デザイン素材、塗料および庭園素材の少なくとも一つの単位量を含む。
【0028】
この構成により、施工補助装置は、施工対象物の特徴に応じた施工要素を、施工特性の算出において用いることができる。
【0029】
本発明の第5の発明に係る施工補助装置では、第3又は第4の発明に加えて、工数は、建築工数、解体工数、塗装工数、印刷工数および造園工数の少なくとも一つの単位量を含む。
【0030】
この構成により、施工補助装置は、施工対象物の特徴に応じた施工要素を、施工特性の算出において用いることができる。
【0031】
本発明の第6の発明に係る施工補助装置では、第3から第5のいずれかの発明に加えて、期間は、建築期間、解体期間、塗装期間、印刷期間および造園期間の少なくとも一つの単位量を含む。
【0032】
この構成により、施工補助装置は、施工対象物の特徴に応じた施工要素を、施工特性の算出において用いることができる。
【0033】
本発明の第7の発明に係る施工補助装置では、第3から第6のいずれかの発明に加えて、コストは、建築コスト、解体コスト、塗装コスト、印刷コストおよび造園コストの少なくとも一つの単位量を含む。
【0034】
この構成により、施工補助装置は、施工対象物の特徴に応じたコストを算出できる。
【0035】
本発明の第8の発明に係る施工補助装置では、第1から第7のいずれかの発明に加えて、算出手段は、施工対象物が施工建築物である場合に、算出される所定領域の面積に基づいて、施工対象物に必要となる、建築素材の種類、量、コスト、建築工数、建築期間および建築コストの少なくとも一つを算出する。
【0036】
この構成により、施工補助装置は、施工建築物の施工に必要となる施工特性を、簡便に見積もることができる。
【0037】
本発明の第9の発明に係る施工補助装置では、第1から第7のいずれかの発明に加えて、施工対象物が解体建築物である場合には、面積算出手段は、解体建築物の複数の方向からの所定領域の面積を算出し、算出手段は、複数の面積値に基づいて、解体建築物の解体工数、解体期間および解体コストの少なくとも一つを算出する。
【0038】
この構成により、施工補助装置は、解体建築物の解体に必要となる施工特性を、簡便に見積もることができる。
【0039】
本発明の第10の発明に係る施工補助装置では、第1から第7のいずれかの発明に加えて、施工対象物が看板および壁面デザインの少なくとも一方である場合には、面積算出手段は、看板および壁面デザインを施工する予定領域の面積を算出し、算出手段は、予定領域の面積に基づいて、看板および壁面デザインの少なくとも一方の、デザイン素材、デザイン工数、デザイン期間およびデザインコストの少なくとも一つを算出する。
【0040】
この構成により、施工補助装置は、看板や壁面デザインなどのデザイン建築物の施工に必要となる施工特性を、簡便に見積もることができる。
【0041】
本発明の第11の発明に係る施工補助装置では、第1から第7のいずれかの発明に加えて、施工対象物が、施工外壁である場合には、面積算出手段は、施工対象となる施工外壁の面積を算出し、算出手段は、施工外壁の面積に基づいて、施工外壁の素材、建築工数、建築期間および建築コストの少なくとも一つを算出する。
【0042】
この構成により、施工補助装置は、施工外壁の施工に必要となる施工特性を、簡便に見積もることができる。
【0043】
本発明の第12の発明に係る施工補助装置では、第1から第11のいずれかの発明に加えて、施工対象物の画像を記憶する第3記憶部を更に備え、面積算出手段は、画像に基づいて、所定領域の面積を算出する。
【0044】
この構成により、施工補助装置は、施工対象物の画像のみで、所定領域の面積を算出できる。
【0045】
本発明の第13の発明に係る施工補助装置では、第11又は第12の発明に加えて、画像は、第1撮像装置により撮像された施工対象物と標識とを含む第1画像と、第1撮像装置と異なる角度から第2撮像装置により撮像された施工対象物と標識とを含む第2画像を有し、面積算出手段は、第1撮像装置の第1位置の3次元座標の値と、第2撮像装置の第2位置の3次元座標の値とを推定する撮像装置座標推定部と、第1位置および第2位置に基づいて、施工対象物に含まれる複数の特定点のそれぞれの3次元座標の値を推定する特定点座標推定部と、複数の特定点のそれぞれの3次元座標の値に基づいて、施工対象物の面積を算出する算出手段と、を備え、
【0046】
標識は、3以上のポインタを備える2次元形状を有する。
【0047】
この構成により、面積算出手段は、標識を含む所定領域の写真のみで、所定領域の面積を算出できる。
【0048】
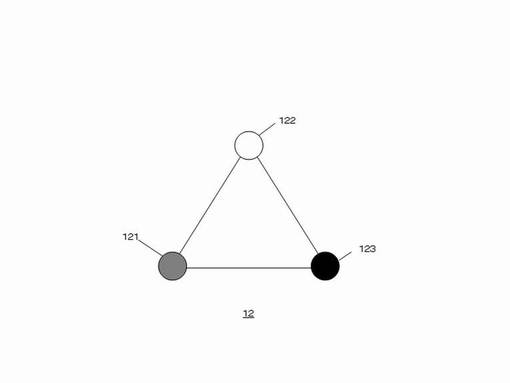
本発明の第14の発明に係る施工補助装置では、第13の発明に加えて、標識は、相互に色度が異なると共に略球形を有する3つのポインタを頂点とする3角形を有する。
【0049】
この構成により、撮像画像の中での標識の区別が容易となり、面積算出手段が、高い精度で所定領域の面積を算出できる。
【0050】
本発明の第15の発明に係る施工補助装置では、第13又は第14の発明に加えて、撮像装置座標推定部は、第1画像に含まれる標識の傾きに基づいて、第1撮像装置の標識に対する方向を第1方向として推定し、第1画像に含まれる標識の面積に基づいて、第1撮像装置と標識との距離を第1距離として推定し、第2画像に含まれる標識の傾きに基づいて、第2撮像装置の標識に対する方向を第2方向として推定し、第2画像に含まれる標識の面積に基づいて、第2撮像装置と標識との距離を第2距離として推定し、第1方向および第1距離に基づいて、第1位置を推定し、第2方向および第2距離に基づいて、第2位置を推定する。
【0051】
この構成により、面積算出手段は、高い精度で、所定領域の面積を算出できる。
【0052】
本発明の第16の発明に係る施工補助装置では、第13から第15のいずれかの発明に加えて、第1位置から得られる特定点の3次元座標の値である第1特定座標と、第2位置から得られる特定点の3次元座標の値である第2特定座標と、が一致しない場合には、特定点座標推定部は、第1特定座標および第2特定座標から、特定点の3次元座標の値を近似する。
【0053】
この構成により、面積算出手段は、撮像画像の写りが悪い場合でも、所定領域の面積を算出できる。
【0054】
本発明の第17の発明に係る施工補助装置では、第13から第16のいずれかの発明に加えて、画像は、第3撮像装置によって、第1撮像装置および第2撮像装置のそれぞれと異なる角度から撮像された施工対象物と標識とを含む第3画像を更に有し、撮像装置座標推定部は、第3撮像装置の第3位置の3次元座標の値を推定し、特定点座標推定部は、第1位置、第2位置および第3位置に基づいて、施工対象物に含まれる複数の特定点のそれぞれの3次元座標の値を推定する。
【0055】
この構成により、面積算出手段は、より精密に、所定領域の面積を算出できる。
【0056】
以下、図面を用いて、本発明の実施の形態について説明する。
【0057】
(実施の形態1)
【0058】
実施の形態1について説明する。
【0059】
(全体概要)
まず、図1、図2を用いて、実施の形態1における施工補助装置の全体概要を説明する。図1は、本発明の実施の形態1における施工対象物の模式図である。図2は、本発明の実施の形態1における施工補助装置のブロック図である。
【0060】
施工対象物100は、施工されたり解体されたりする、不動産、施工建築物、解体建築物、看板、壁面デザイン、施工外壁など、様々なものを含む。多くの場合には、施工対象物100は、屋外に設置される住宅やビルなどであったり、これらの一部であったりする。施工対象物100は、様々な形態や態様の建築物を含み、施工補助装置1は、施工や解体を受ける種々の建築物やこれに類するものを、施工対象物100として幅広く対象とする。
【0061】
図1では、施工対象物100の例として、施工外壁101と看板102が示されている。施工外壁101は、ビルや集合住宅の壁面の一部もしくは全部であって、塗装やデザインが施されたりする対象となる外壁である。看板102は、ビル103の上に設置されるように図1では示されている。あるいは、地上やその他の場所に設置される看板102であってもよい。あるいは、看板102は、ビルなどの外壁の一部に設置される吊り看板やポスターのようなものであってもよい。
【0062】
施工外壁101および看板102のいずれも、屋外である上に、ビルの外壁であったりビルの上であったりなどでの作業を余儀なくされる。実際の施工作業は、屋外である現地での作業となることは仕方がないが、施工作業の事前の見積作業が現地での危険性を伴う作業となることは回避されることが好ましい。一方で、見積の危険な作業を省略したり短縮したりすると、実際の施工作業において、必要な材料や素材が足りなくなったり不要にあまったりすることもある。あるいは、予想の工数や期間を上回ったりすることもある。これらは、当然にコストや信頼性の点で問題を生じさせる。
【0063】
一方で、ビルの施工外壁101の施工における素材やコストなどの施工要素を見積もるためには、施工外壁101の施工対象となる所定領域110の面積が事前に算出される必要がある。あるいは、ビルの屋上に設置される看板102の施工やデザイン作業における不具合を生じさせないためにも、看板102の所定領域110の面積が事前に算出されていることが好ましい。これら施工対象物100の所定領域110が事前に算出されていることで、施工対象物100の施工に必要となる素材やコストなどの施工特性が事前に見積もることができる。事前にこれらの施工要素が見積もられていると、実際の施工作業におけるコスト超過や期間超過などの問題が低減できる。
【0064】
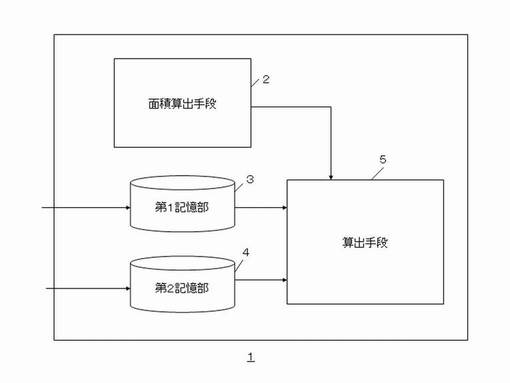
施工補助装置1は、事前に施工対象物に必要となる施工特性を算出して、施工対象物における実際の施工業務を補助できる。施工補助装置1は、面積算出手段2、第1記憶部3、第2記憶部4および算出手段5を備える。
【0065】
面積算出手段2は、施工対象物100の所定領域110の面積を算出する。第1記憶部3は、施工対象物100の周辺情報を記憶する。例えば、第1記憶部3は、施工対象物100に存在する他の建築物、道路状況、日照条件などを、周辺情報として記憶する。第2記憶部4は、施工対象物100の施工に必要となる要素である施工要素を記憶する。第2記憶部4が記憶する施工要素は、施工対象物100を施工する際に見積される施工特性の基本となる単位である。算出手段5は、所定領域110の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する。
【0066】
施工補助装置1は、施工対象物100の所定領域110の面積に基づいて、施工対象物の施工特性を算出できる。この結果、施工対象物100の施工が実際になされる際に、材料の過不足、コスト超過、期間超過などの問題を生じさせにくくなる。
【0067】
(処理動作)
施工補助装置1の処理動作を説明する。
【0068】
施工補助装置1は、使用者による指示に従って動作を開始する。まず、施工補助装置1に対する動作指示を受けて、面積算出手段2は、施工対象物100の画像などに基づいて、施工対象物100の所定領域110の面積を算出する。
【0069】
所定領域110は、施工対象物100において実際に施工を受ける領域である。施工を受ける領域である所定領域110に対して、施工が施されたり、デザインが施されたり、塗装や印刷が施される。あるいは、所定領域110に基づいて算出されたり推測されたりする体積や外形を有する施工対象物100に、建築や解体が施されたりする。これ等の施工や解体における施工特性が、予め見積もられていることが、施工における種々の問題発生防止には好適である。この施工特性を見積もるには、所定領域110の面積が算出されていることが必要である。面積算出手段2は、施工対象物100の画像などに基づいて、所定領域110の面積を算出でき、この算出した面積値を、算出手段5に出力する。
【0070】
第1記憶部3は、施工対象物100の周辺情報を記憶しており、この周辺情報を算出手段5に出力する。施工対象物100の施工特性は、所定領域110の面積だけでなく、周辺環境にも依存する可能性がある。例えば、施工対象物100が看板102であって算出したい施工特性が施工期間である場合に、看板102の周辺に多数の建物があると、作業に困難性が生じたり塗料の乾燥に遅れが生じたりする。このような困難性や遅れは、施工期間への影響を生じさせる。このため、算出手段5において施工期間に関する施工特性を算出する場合には、算出手段5は、周辺情報を加味することが好適である。
【0071】
第1記憶部3は、面積算出手段2で用いられる施工対象物100の画像に基づいて、周辺情報を抽出して記憶する。例えば、第1記憶部3は、施工対象物100に関する画像を読み込み、施工対象物100の周辺における他の建物、交通、道路状況、天候などに関する部分を抽出する。この抽出された部分に基づいて、周辺情報を整理して、これらを第1記憶部3が記憶する。このため、第1記憶部3は、周辺の建物、交通、道路状況、天候などの周辺情報を記憶でき、算出手段5に出力する。
【0072】
第2記憶部4は、施工対象物100の施工に必要となる要素である施工要素を記憶している。施工要素は、施工特性に関連している。言い換えれば、施工要素は、施工特性の一単位であると考えることが適当である。例えば、施工要素は、施工対象物に基づく素材、工数、期間およびコストの少なくとも一つの単位を含む。すなわち、素材の単位や工数の単位を、施工要素は、含む。施工要素に対して、面積算出手段2で算出された面積値が加味されることで、施工対象物100に必要な施工要素の合計である施工特性が定まる。
【0073】
第2記憶部4は、施工対象物100として考えられる種々の建築物に対応する施工要素を予測に基づいて記憶していることでもよい。あるいは、第2記憶部4は、施工対象物100の個々の特性に応じて、使用者によって入力された施工要素を記憶しても良い。あるいは、施工対象物100のアップデートに応じて施工要素がアップデートされ、このアップデートされた施工要素を記憶しても良い。
【0074】
第2記憶部4は、施工要素を算出手段5に出力する。この結果、算出手段5は、施工要素を用いて、施工特性を算出できる。
【0075】
算出手段5は、面積算出手段2から得られる所定領域の面積値、第1記憶部3から得られる周辺情報および第2記憶部4から得られる施工要素の少なくとも2つに基づいて、施工対象物100における施工特性を算出する。すなわち、施工対象物100が実際に施工等される場合に必要となる各種特性が、事前に見積りできるようになる。
【0076】
例えば、面積算出手段2で算出された面積値に、施工要素である素材とその単価が乗算されることで、施工対象物100の所定領域におけるデザイン塗装コストが算出される。このデザイン塗装コストが算出されていれば、看板102や施工外壁101にデザイン画を施工する業者は、事前に高い精度で施工コストを見積もることができる。この結果、業者は、見積ミスによる不利益を回避できるようになる。もちろん、算出手段5は、周辺情報に基づいて、必要となる塗料の量の調整分を考慮して施工コストを算出しても良い。
【0077】
以上のように、施工補助装置1は、施工対象物100の所定領域の面積、周辺情報、施工要素に基づくことで、施工や解体に必要となる施工特性を、高い精度で算出できる。結果として施工に必要な種々の見積が高い精度で行われるようになり、施工における種々の不具合を未然防止できる。
【0078】
なお、面積算出手段2による面積値の出力、第1記憶部3による周辺情報の出力および第2記憶部4による施工要素の出力は、並列に行われても良いし、順次処理で行われても良い。また、面積算出手段2や第1記憶部3などが、主体的に、算出手段5に情報やデータを出力しても良いし、算出手段5がこれ等の要素から情報やデータを読み出すことでも良い。
【0079】
次に、各部の詳細について説明する。
【0080】
(面積算出手段)
面積算出手段2は、種々の手順と手法で、施工対象物100の所定領域110の面積を算出する。所定領域110の全体の面積を算出しても良いし、一部の面積を算出しても良い。また、同じ施工対象物100のある方向からみた所定領域110と別の方向から見た別の所定領域110の面積を算出しても良い。あるいは、同じ所定領域110について異なる角度から見える面積を算出しても良い。
【0081】
面積算出手段2は、所定領域110の撮像画像に基づいて所定領域110の面積を算出する。所定領域110の撮像画像によって、所定領域110に含まれる特定点の3次元座標が推定されるので、所定領域110の面積を算出できる。
【0082】
面積算出手段2は、所定領域110に含まれる(特に、その外周に位置する)複数の特定点の3次元座標によって、所定領域110の面積を算出する。面積算出手段2は、施工補助装置1に組み込まれる専用の回路、専用の半導体集積回路、専用のソフトウェア、汎用の回路、汎用の半導体集積回路、汎用のソフトウェアなどの少なくとも一つによって実現されれば良い。もちろん、汎用CPU上で動作するソフトウェアと必要となるハードウェアとの組み合わせで実現されても良い。
【0083】
(第1記憶部)
【0084】
第1記憶部3は、施工対象物の周辺情報を記憶する。
【0085】
周辺情報は、施工対象物100の周辺の建築物・交通状態、施工対象物100の材質、方角、角度、高さなどの少なくとも一つの情報を含む。加えて、施工対象物100の平均的な天気、平均気温、平均照度、平均日照時間などの気候に関する情報や、施工対象物100周辺の地図情報、施工対象物100周辺の人口動向などの情報を含んでいても良い。周辺情報は、施工対象物100に施工される壁面デザインや施工外壁の特徴を決定できるからである。
【0086】
第1記憶部3は、記憶する周辺情報を算出手段5に出力する。あるいは、算出手段5が、第1記憶部3に記憶される周辺情報を読み出す。また、第1記憶部3は、面積算出手段2が算出した面積値を記憶しても良い。
【0087】
第1記憶部3は、施工補助装置1が備えるハードディスクドライブ、光ディスク、磁気ディスク、CD−ROM、DVD−ROM、USBメモリ、半導体メモリ、光メモリ、磁気メモリなど、データを電気信号として記憶できる種々の記憶可能なデバイスを含む。また、施工補助装置1が予め備えているこれらの記憶可能なデバイスが、第1記憶部3として用いられても良いし、施工補助装置1が、汎用のパーソナルコンピュータを利用する場合には、パーソナルコンピュータが備えるハードディスクドライブや内部メモリなどが、第1記憶部3として用いられても良い。
【0088】
なお、第1記憶部3は、内部のアドレスがバンク分割されており、周辺情報が所定のジャンルに分類された上で、バンク毎に記憶されても良い。バンク毎に分類されていることで、算出手段5による周辺情報の読み出し速度が速くなり、算出手段5による算出速度が向上するからである。
【0089】
また、第1記憶部3は、第2記憶部4と共通のデバイスであっても良いし、別体のデバイスであっても良い。更には、第1記憶部3は、施工補助装置1が必要とする他の記憶部と共通のデバイスの一部であっても良い。
【0090】
(第2記憶部)
第2記憶部4は、施工対象物100の施工に必要となる要素である施工要素を記憶する。施工要素は、施工対象物100を施工する際に必要となる施工特性を算出するための要素・単位となるものである。施工要素は、施工対象物100に基づく素材、工数、期間およびコストの少なくとも一つの単位を含む。第2記憶部4は、これらの施工要素を算出手段5に出力することで(あるいは、算出手段5がこれらの施工要素を読み出すことで)算出手段5における施工特性の算出を実現できる。
【0091】
施工要素における素材は、建築素材、デザイン素材、塗料および庭園素材の少なくとも一つの単位量を含む。これらの素材のいずれかの情報を、第2記憶部4が記憶することで、算出手段5は、施工対象物100の特性に応じた素材に関する施工特性を算出できる。すなわち、算出手段5は、施工対象物100に用いられるのに好適な素材を算出できる。
【0092】
あるいは、施工要素における工数は、建築工数、解体工数、塗装工数、印刷工数および造園工数の少なくとも一つの単位量を含む。これらの工数のいずれかの情報を、第2記憶部4が記憶することで、算出手段5は、施工対象物100の特性に応じた工数に関する施工特性を算出できる。すなわち、算出手段5は、施工対象物100に必要となる建築工数や解体工数を算出できる。
【0093】
また、施工要素における期間は、建築期間、解体期間、塗装期間、印刷期間および造園期間の少なくとも一つの単位量を含む。これらの期間のいずれかの情報を、第2記憶部4が記憶することで、算出手段5は、施工対象物100の期間に関する施工特性を算出できる。
【0094】
同様に、施工要素におけるコストは、建築コスト、解体コスト、塗装コスト、印刷コストおよび造園コストの少なくとも一つの単位量を含む。これらのコストのいずれかの情報を、第2記憶部4が記憶することで、算出手段5は、施工対象物100に必要となるコストに関する施工特性を算出できる。
【0095】
以上のように、第2記憶部4は、施工要素を記憶することで、施工対象物100の事前見積として必要となる施工特性の、高い精度での算出を可能とする。第2記憶部4は、第1記憶部3と同様に、施工補助装置1が備えるハードディスクドライブ、光ディスク、磁気ディスク、CD−ROM、DVD−ROM、USBメモリ、半導体メモリ、光メモリ、磁気メモリなど、データを電気信号として記憶できる種々の記憶可能なデバイスを含む。
【0096】
(算出手段)
算出手段5は、施工特性を算出する。施工特性は、施工対象物100の施工の事前に見積もられておくことが好適な種々の特性である。これらの施工特性が事前に高い精度で見積もられていることで、実際の施工に移行した後で、材料の不足、期間の超過、コストの超過などの問題が生じにくい。これらの問題が後から生じないことで、施工業者は、安心して施工や解体を行うことができる。もちろん、見積に要する負担も減少するので、入札等への参加もしやすくなる。
【0097】
(施工建築物)
算出手段5は、施工対象物100が施工建築物である場合に、算出される所定領域の面積に基づいて、施工対象物100に必要となる、建築素材の種類、量、コスト、建築工数、建築期間および建築コストの少なくとも一つを算出する。施工対象物100が、例えばビル、住居、事業場などの施工される建築物である場合には、この施工対象物100の建築に必要となる素材、建築期間、建築コストなどが、事前に見積もられていることが好ましい。このとき、施工対象物100の外形が大まかにできていれば、外形の画像等に基づいて、所定領域110の面積を算出できる。所定領域110の設定の仕方によって、所定領域110の面積によって、施工対象物100全体の指標となる面積値を得ることができる。
【0098】
算出手段5は、面積算出手段2で算出された面積値によって、施工対象物100全体の指標となる大きさを得ることができる。算出手段5は、第2記憶部4から施工要素を読み出して、この施工要素と面積値とを乗算することで、施工特性を算出する。例えば、施工要素の一つである建築期間の単位量を面積値に乗算することで、施工対象物100の建築期間を算出できる。このとき、所定領域110の設定の仕方によって、乗算で得られる建築期間は、施工対象物100の全ての建築期間であったり、一部の建築期間であったりする。いずれの場合でも、建築物に関する建築期間の指標となる。
【0099】
同様に、算出手段5は、建築コストの単位量に面積値を乗算することで、施工対象物100の建築コスト(全体であるか一部であるか)を算出できる。建築コストが事前に算出されれば、施工業者にとっては当然に便利である。
【0100】
(解体建築物)
施工対象物100が解体建築物である場合には、面積算出手段2は、解体建築物の複数の方向からの所定領域の面積を算出する。複数の方向からの面積値が算出されていることで、解体建築物の全体(体積)が推定できる。算出手段5は、これらの複数の面積値に基づいて、解体建築物の解体工数、解体期間および解体コストの少なくとも一つを算出する。解体建築物の解体作業において、このような施工特性が事前に見積もられていることで、解体作業における不具合が生じにくくなる。
【0101】
また、面積算出手段2は、施工対象物100の画像などに基づいて、所定領域110の面積を算出できるので、見積のために、現場に何度も足を運ぶ必要も無い。当然に危険な測量作業も減少する。算出手段5は、解体建築物に係る面積値とこれを応用した体積値に、施工要素に含まれる単位量を乗算することで、解体期間や解体コストを算出できる。この算出手順は、施工対象物100が施工建築物である場合と同じである。
【0102】
(看板もしくは壁面デザイン)
施工対象物100が看板および壁面デザインの少なくとも一方である場合には、面積算出手段2は、看板および壁面デザインを施工する予定領域の面積を算出する。すなわち、面積算出手段2が算出する所定領域は、施工を行う予定である予定領域である。算出手段5は、予定領域の面積に基づいて、看板および壁面デザインの少なくとも一方の、デザイン素材、デザイン工数、デザイン期間およびデザインコストの少なくとも一つを算出する。
【0103】
他の場合と同様に、算出手段5は、面積値に必要な施工要素の単位量を乗算することで、デザイン工数やデザインコストを算出する。また、素材の単位量に基づいて、デザインに必要となる素材の種類、量、コストを算出することもできる。看板や壁面デザインについての、これらの施工特性が事前に見積もられていることで、実際の施工時における種々の不具合を防止できる。
【0104】
(施工外壁)
施工対象物100が、施工外壁である場合には、面積算出手段2は、施工対象となる施工外壁の面積を算出する。次いで、算出手段5は、施工外壁の面積に基づいて、施工外壁の素材、建築工数、建築期間および建築コストの少なくとも一つを算出する。これらが算出されて事前に見積もられることで、施工外壁の実際の施工における不具合を防止できる。当然ながら、施工外壁の施工に必要なコストや期間が見積もられれば、施工業者は、入札および施工が容易となる。
【0105】
以上のように、算出手段5は、様々な施工対象物100に対応した施工特性を算出できる。
【0106】
施工特性は、面積値に基づいて算出されるので、使用上十分な精度を有している。加えて、施工対象物100の画像等に基づくだけで面積値が算出されるので、簡便かつ早く施工特性が算出される。すなわち、施工補助装置1は、使用上十分な精度であって簡便かつ早く施工特性を算出する必要がある分野に好適に用いられる。例えば、非常に緻密な装置やアルゴリズムによって、詳細の面積値を算出すれば、最終的に算出される施工特性の精度を精密にすることも可能である。しかしながら、施工特性を精密に算出することは、作業負担、作業コスト、設備コスト、人的コストの面で不利である。多くの施工対象物100は、精密な施工特性を求めることは少なく、早期かつ簡便に使用上十分な施工特性を必要としている。
【0107】
実施の形態1における施工補助装置1は、このような施工対象物100に最適に合致している。
【0108】
(実施の形態2)
【0109】
次に、実施の形態2について説明する。実施の形態2では、面積算出手段2が第3記憶部に記憶されている画像に基づいて、所定領域110の面積値を算出する機能について説明する。
【0110】
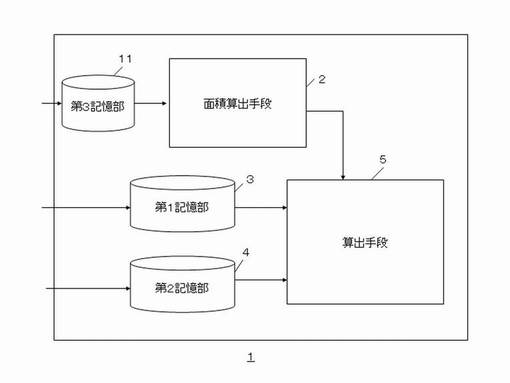
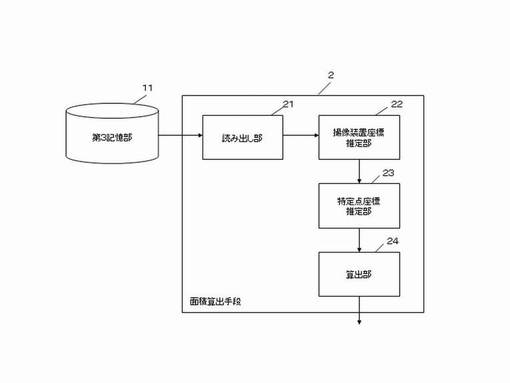
図3は、本発明の実施の形態2における施工補助装置のブロック図である。施工補助装置1は、第3記憶部11を更に備える。第3記憶部11は、施工対象物100の画像を記憶する。面積算出手段2は、第3記憶部11が記憶する施工対象物100の画像を読み出すことで、所定領域110の面積を算出する。
【0111】
なお、第3記憶部11は、第1記憶部3や第2記憶部4と同じ要素に含まれても良い。第1〜第3は、便宜上の名称であって、要素としての特段に物理的に区別することではない。
【0112】
面積算出手段2は、第3記憶部11から得られる施工対象物100の画像に基づいて、所定領域110の面積を算出する。このとき、施工対象物100の画像を撮像する撮像手段をさらに備え、この撮像手段によって撮像された画像が、第3記憶部11に記憶される。
【0113】
(撮像画像に基づく、面積の算出)
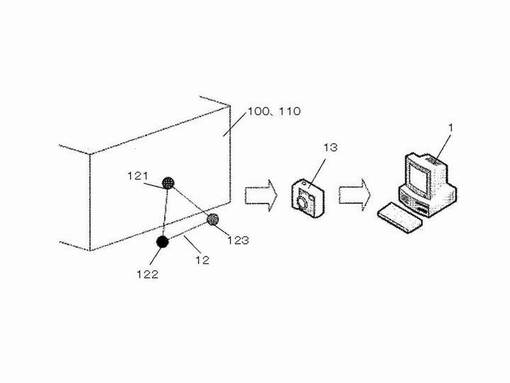
図4は、本発明の実施の形態2における撮像画像に基づく面積算出を示す概念図である。施工補助装置1は、撮像装置13によって得られる施工対象物100の画像に基づいて、実施の形態1で説明した施工対象物100の施工に必要となる施工特性を算出する。
【0114】
標識12は、3つのポインタ121、122,123を備える基準部材であり、標識12を基準とした撮像装置13の3次元座標から、面積算出手段2は、所定領域110の面積を算出する。標識12が施工対象物100と同じ撮像領域に設置されて、撮像装置13が、施工対象物100と標識12とを合わせて撮像する。
【0115】
撮像装置13は、カメラ、デジタルカメラ、デジタルビデオカメラ、携帯端末、携帯電話機などの撮像機能を有する電子機器や電子装置である。標識12を含む施工対象物100の画像を撮像した撮像装置13は、画像を施工補助装置1に送信する。このとき、有線通信や無線通信で送信しても良いし、記憶媒体によって転送しても良い。
【0116】
図4では、施工補助装置1は、パーソナルコンピュータを実現例として示している。施工補助装置1は、このようなパーソナルコンピュータや汎用装置で実現されても良いし、専用装置によって実現されても良い。
【0117】
まず標識12が施工対象物100に近接して設置され、撮像装置13が標識12と所定領域110とを同時に撮影する。このとき、撮像装置13は、標識12と施工対象物100とを含む第1画像と、第1画像と異なる角度から撮像される標識12と施工対象物100とを含む第2画像(あるいは、第3画像以上を)を撮像する。このとき、撮像される第1画像および第2画像は、施工対象物100を含むと共に面積を算出したい所定領域110も含んでいる。これは、以下においても同様である。
【0118】
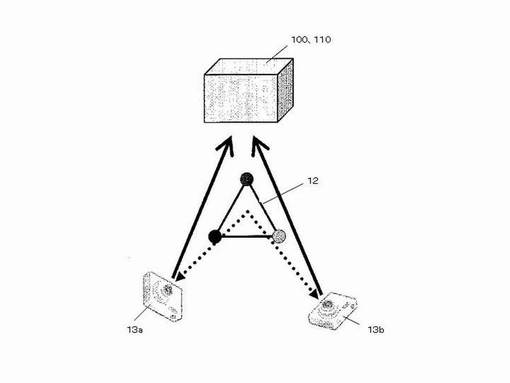
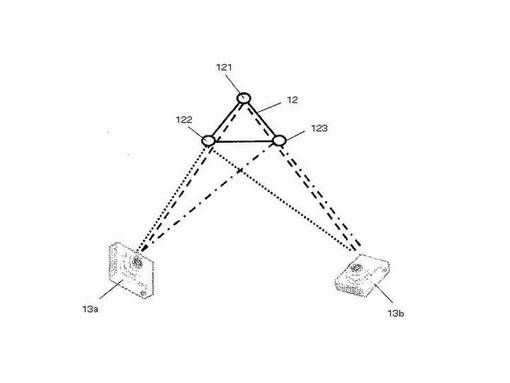
図5に、第1撮像装置13aと第2撮像装置13bが、施工対象物100と標識12とを撮像する様子を示す。図5は、本発明の実施の形態2における第1画像と第2画像との撮像を説明する模式図である。第1撮像装置13aは、所定の方向から施工対象物100と標識12とを撮像して、第1画像を得る。一方、第2撮像装置13bは、第1撮像装置13aと異なる角度から、施工対象物100と標識12とを撮像して、第2画像を得る。
【0119】
第3記憶部11もしくは面積算出手段2は、撮像装置13から第1画像と第2画像を得る。第1画像および第2画像は、上述の通り、施工対象物100と標識12とを含んでいる。第1撮像装置13aと第2撮像装置13bとを、施工現場であるフィールドで作業する作業者が持参して対象となる施工対象物100の第1画像と第2画像とを撮像する。もちろん、1枚の第1画像と第2画像とを撮像するだけでなく、多くの情報を得るために複数の第1画像と第2画像とを撮像してもよい。また、フィールド作業者は、第1画像と第2画像の撮像だけでなく、施工対象物100の周辺情報についても収拾する。
【0120】
第1画像と第2画像は、データ転送、ネットワーク転送などによって、第3記憶部11(あるいは、面積算出手段2の備えるメモリ)に転送される。この作業の際に、周辺情報が第1記憶部3に転送されても良い。結果として、第3記憶部11に施工対象物100の第1画像と第2画像とが記憶され、第1記憶部3に施工対象物100の周辺情報が記憶される。
【0121】
面積算出手段2は、読み出し部21、撮像装置座標推定部22、特定点座標推定部23、算出部24を備えている。図6は、実施の形態2における面積算出手段の内部ブロック図である。ここで、読み出し部21は、第3記憶部11に含まれる要素でも良い。図6は、第1撮像装置13aと第2撮像装置13bとによって撮像された第1画像と第2画像とを用いて所定領域110の面積を算出するのに必要な要素を示している。
【0122】
読み出し部21は、第3記憶部11に記憶されている第1画像と第2画像とを読み出す。このとき、読み出し部21は、画像を1枚ずつ読み出しもよいし、一度に複数の画像を読み出しても良い。読み出し部21は、読み出した画像のデータを撮像装置座標推定部22に出力する。
【0123】
撮像装置座標推定部22は、第1画像を撮像した撮像装置(第1撮像装置13a)の3次元座標で表される第1位置と、第2画像を撮像した撮像装置(第2撮像装置13b)の3次元座標で表される第2位置とを推定する。なお、第1撮像装置13aと第2撮像装置13bとは、説明の便宜上「第1、第2」と記載されているだけで、第1撮像装置13aと第2撮像装置13bとは、同一の装置であっても異なる装置であってもかまわない。この点は、本明細書の全体に渡って同様である。
【0124】
また、他の画像があれば、撮像装置座標推定部22は、第3撮像装置が配置された第3位置の3次元座標(第n撮像装置が配置された第n位置の3次元座標も)を推定する。撮像装置座標推定部22は、画像の中に含まれる標識12の傾きに基づいて、撮像装置と標識12との方向を推定する。ついで、画像の中に含まれる標識12の面積に基づいて、撮像装置と標識12との距離を推定する。撮像装置座標推定部22は、この方向と距離を用いて、撮像装置の位置の3次元座標を推定する。なお、標識12は、その大きさ、形状、面積などが既知である。
【0125】
撮像装置座標推定部22によって、2次元座標であるローカル座標を有する撮像装置の座標が、標識12を基準とした3次元座標であるグローバル座標に変換される。なお、撮像装置座標推定部22は、複数の位置における撮像装置のそれぞれの3次元座標の値を推定する。結果として、異なる位置にある撮像装置それぞれの3次元座標の値が推定される。
【0126】
第1位置と第2位置が推定されると、第1位置と第2位置に基づいて、特定点座標推定部23が、所定領域110に含まれる複数の特定点のそれぞれの3次元座標を、推定する。所定領域110に含まれる複数の特定点の3次元座標が定まれば、面積を算出することができるようになる。
【0127】
特定点座標推定部23は、推定された撮像装置の3次元座標を基準に、所定領域110に含まれる特定点の3次元座標を推定する。所定領域110は、その面積を算出したい領域であり、特定点座標推定部23は、この領域の外縁に沿った複数の点を特定点として決定する。これら複数の特定点のグローバルな3次元座標の値が求まれば、これら特定点で囲まれる領域の面積が算出できる。
【0128】
撮像装置座標推定部23によって、撮像装置の3次元座標の値は推定されている。特定点の3次元座標は、撮像装置の3次元座標に基づいて推定される。すなわち、複数の撮像装置からある特定点の方向を推定し、複数の撮像装置から推定された特定点の方向の重複点が、特定点の3次元座標の値となる。このように、特定点の一つの3次元座標の値は、複数の撮像装置の位置に基づいて算出される。特定点座標推定部23は、複数の特定点のそれぞれに推定の作業を行うことで、複数の特定点のそれぞれの3次元座標の値を算出する。
【0129】
特定点座標推定部23は、推定した複数の特定点の3次元座標の値を、算出部24に出力する。
【0130】
算出部24は、特定点座標推定部43より受け取った特定点の3次元座標に基づいて、所定領域110の面積を算出できる。なお、算出部24は、所定領域110において、特定点によって囲まれる所定の領域の面積を算出する。算出部24で算出された面積値が、算出手段5に出力されて、施工特性の算出がなされる。
【0131】
以上のように、施工対象物100に標識12を含む異なる位置からの複数の画像によって、面積算出手段2は、所定領域110の面積を算出できる。特に、標識12と施工対象物100とは、撮像した画像に写っているので、第3記憶部11が画像を記憶していれば、いかなる場所においても、面積算出手段2は、面積を算出できる。また、標識と共に写りこんでいる施工対象物100であれば、その特定点の選び方によって、様々な領域の面積を算出できるので、使用者は、フレキシブルに所定領域110を選択して、その面積値を算出できる。
【0132】
なお、面積算出手段2は、施工対象物100と標識12とが写っている画像について、より様々な位置や角度から撮像された多くの画像に基づくことで、面積算出の精度を向上させることができる。
【0133】
次に、面積算出手段2に含まれる要素の詳細および面積算出の詳細について説明する。
【0134】
(第1画像、第2画像)
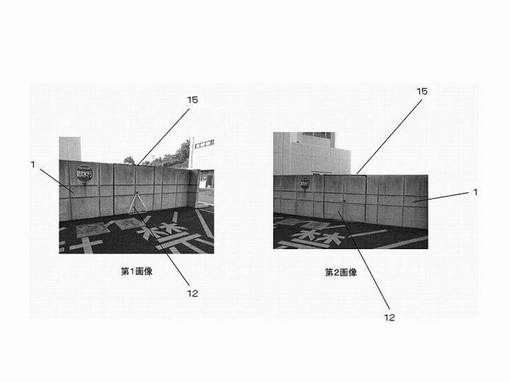
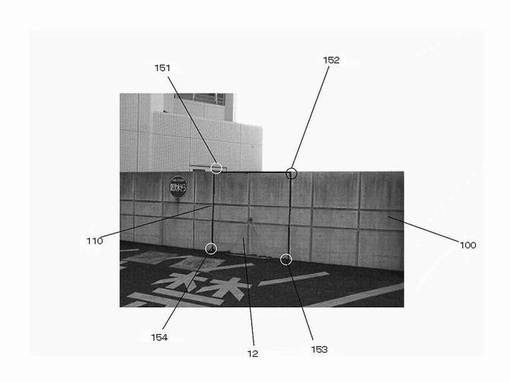
図7に第1画像と第2画像の例を示す。図7は、本発明の実施の形態2における第1画像と第2画像の写真例である。第1画像および第2画像のそれぞれは、施工対象物100であるブロック塀と三角形の形状を有する標識12とを含んでいる。また、施工対象物100の一部が線で枠囲いされているが、この枠囲いされている領域が、面積算出の対象となる所定領域110である。
【0135】
図7の第1画像と第2画像が示すように、第1画像と第2画像とは、異なる角度から施工対象物100と標識12とを有している。図7に示される第1画像と第2画像とが第3記憶部11に記憶されている。
【0136】
(読み出し部)
読み出し部21は、第3記憶部11に記憶されている画像を読み出す。例えば、読み出し部21は、HDDやDVDドライブなどに設けられているデータの読取装置およびこの読取装置を駆動するソフトウェアなどを含む。第3記憶部11が半導体メモリや光ディスクである場合には、読み出し部21は、読み出し対象の画像が含まれているアドレスを指定し、当該アドレスに対応するデータを読み出す。
【0137】
読み出し部21は、第3記憶部11から画像を読み出せればよく、その実現手段や構成は、公知技術や一般的に用いられる技術でよい。また、読み出し部21は、データの読み出しだけに限定されるものではなく、データの書き込みを行っても良い。
【0138】
読み出し部21は、図7に示される第1画像と第2画像とを読み出す。読み出し部21は、読み出した第1画像と第2画像とのデータを、撮像装置座標推定部22に出力する。
【0139】
なお、読み出し部21は、ハードウェアで実現されてもソフトウェアで実現されも、ハードウェアとソフトウェアの混在で実現されても良い。
【0140】
(撮像装置座標推定部)
撮像装置座標推定部22は、第1撮像装置13aの配置される第1位置と、第2撮像装置13bの配置される第2位置の、グローバル座標に基づく3次元座標の値を推定する。撮像装置座標推定部22は、標識12を利用して、第1位置と第2位置の3次元座標の値を推定する。第1位置と第2位置の3次元座標の値に基づいて、所定領域110の特定点の3次元座標の値が推定できるようになる。
【0141】
ここで、撮像装置座標推定部22は、第1画像に写っている標識12の傾きに基づいて、第1撮像装置13aの標識12に対する方向を第1方向として推定する。ついで、撮像装置座標推定部22は、第1画像中における標識12の面積に基づいて、第1撮像装置13aと標識12との距離を第1距離として推定する。
【0142】
同様に、撮像装置座標推定部22は、第2画像に写っている標識12の傾きに基づいて、第2撮像装置13bの標識12に対する方向を第2方向として推定する。ついで、撮像装置座標推定部22は、第2画像中における標識12の面積に基づいて、第2撮像装置13bと標識12との距離を第2距離として推定する。
【0143】
なお、撮像装置座標推定部22は、具体的には標識12が含む特定の部位(ポインタ)を基準として、撮像装置と標識12との方向を推定する。このため、標識12は、ポインタを有していることが必要である。特には、ポインタから傾きを検出する必要があるので、標識12は3個以上のポインタを有している必要がある。
【0144】
撮像装置座標推定部22は、第1方向および第1距離に基づいて、第1位置の3次元座標の値を推定し、第2方向および第2距離に基づいて、第2位置の3次元座標の値を推定する。このとき、撮像装置座標推定部22は、第1画像および第2画像に写っている標識12の傾きと面積を利用する。このため、標識12は、画像に写っている状態だけでその傾きと面積とを容易に算出できる構成を有していることが好ましい。
【0145】
例えば、標識12は、その形状や面積が既知であって、画像中で標識12の全体形状や画像中における面積が算出しやすい形状を有していることが好適である。加えて、標識12は、画像のみで、標識12の傾きが判別しやすい形状を有していることが好適である。
【0146】
(標識について)
図8は、本発明の実施の形態2における標識の正面図である。上述のように、画像中で標識12を認識しやすい一例を、図8は示している。勿論、図8に示される形状や構成に、標識12の形状や構成が限られるものではない。
【0147】
標識12は、3以上のポインタを有している。図8では、標識12は、3つのポインタ121、122、123を有している。3つのポインタ121、122、123同士を結ぶ棒状部材によって、標識12は、3つのポインタ121、122、123を頂点とする略三角形の形状を有する。このとき、標識12を形成する三角形は、既知である所定の面積を有している。標識12の本来の面積が既知であることで、画像における標識12の面積(すなわち、三角形の面積)が算出されれば、算出された面積と本来の面積との縮尺率から、撮像装置から標識12までの距離が算出できる。
【0148】
また、標識12が図8に示されるように三角形を有していることで、最少の頂点数により面積を有するので、標識12が画像の中で判別しやすい上に面積や大きさが判別されやすい。
【0149】
このように、標識12が、3つのポインタ121、122、123を頂点とする三角形を有することで、(1)画像中における標識12が容易かつ確実に判別できる、(2)標識12の画像中における面積を算出しやすい、(3)画像中での標識12の面積と、実際の標識12の面積との比較から、撮像装置から標識12までの距離が容易に算出できる、とのメリットを生じる。
【0150】
また、撮像装置座標推定部22は、画像中の標識12の傾きから、撮像装置と標識12との方向を推定する。例えば、図7の第1画像では、標識12は、正面から見て右側に傾いている。一方、図7の第2画像では、標識12は、正面から見て左側に傾いている。第1画像と第2画像のいずれであっても、標識12がどのように傾いているかは、容易に判別できる。撮像装置座標推定部22にとって、標識12の傾きを容易かつ確実に判別できることは、撮像装置と標識12との方向を推定する上で重要である。
【0151】
ここで、3つのポインタ121、122、123のそれぞれは、相互に色度が異なっていることも好適である。相互に色度が異なっていることで、画像中における標識12の判別が確実になる。特に、撮像装置座標推定部22は、ポインタ121、122、123のそれぞれを基準として、撮像装置と標識12との方向を推定するので、ポインタ121、122、123のそれぞれは、確実に区別できることが好ましい。ポインタ121、122、123のそれぞれの色度が相互に異なることで、画像中に写っているポインタ121、122、123のそれぞれが、個々に区別できるようになる。
【0152】
また、3つのポインタ121、122、123のそれぞれは、略球形を有することが好ましい。撮像装置座標推定部22は、標識12に含まれるポインタ121、122、123のそれぞれを基準として撮像装置との方向を推定する。このため、標識12の画像中での写りこみの態様の如何にかかわらず、撮像装置座標推定部22は、画像中のポインタを確実に認識できる必要がある。このとき、ポインタ121、122、123のそれぞれが略球形であることで、標識12がどのような角度から撮像されていてもポインタ121、122、123の形状に変化がない(画像に写っている形状において)。このため、撮像装置座標推定部22は、画像の中から確実に標識12を認識できる。
【0153】
実際には、表示された第1画像や第2画像において、使用者がポインタを選択することで、ポインタと撮像装置との方向や距離が算出される。このとき、撮像されている角度によってポインタの形状が異なってしまっては、正確な選択ができない。ポインタが略球形を有していることで、撮像されている角度によることなく(異なる画像によることなく)、ポインタを正確に選択できる。
【0154】
このように、ポインタ121、122、123が異なる色度を有していたり、略球形を有していたりすることで、(1)画像中におけるポインタが容易かつ確実に判別できる、(2)画像の撮像角度の違いによっても、ポインタを一義的に選択できる、(3)ポインタが正確に選択できることで、標識12に対する撮像装置の方向が確実に推定できる、メリットが生じる。
【0155】
撮像装置座標推定部22は、第1画像に写っているポインタ121、122、123のそれぞれから、第1撮像装置13aの標識12に対する方向を推定する。同様に、撮像装置座標推定部22は、第2画像に写っているポインタ121、122、123のそれぞれから、第2撮像装置13bの標識12に対する方向を推定する。
【0156】
図9は、撮像装置の標識12に対する方向を推定する状態を示している。図9は、本発明の実施の形態2における撮像装置の方向推定の模式図である。
【0157】
標識12は、3つのポインタ121、122、123を有しており、第1位置に配置される第1撮像装置13aは、第1画像を撮像し、第2位置に配置される第2撮像装置13bは、第2画像を撮像する。
【0158】
撮像装置座標推定部22は、第1画像において、ポインタ121、ポインタ122およびポインタ123を選択して、ポインタ121、122、123のそれぞれで構成される平面(標識12の三角形の平面)の傾きを算出する。この傾きによって、第1撮像装置13aの標識12に対する第1方向が推定される。なお、標識12の画像中での形状と標識12の傾きとの相関関係を明示したテーブルに基づいて、撮像装置座標推定部22は、第1方向を推定しても良い。
【0159】
同様に、撮像装置座標推定部22は、第2画像において、ポインタ121、122、123を選択して、ポインタ121、122、123のそれぞれによって構成される平面(標識12の三角形の平面)の傾きを算出する。この傾きによって、第1撮像装置13bの標識12に対する第2方向が推定される。なお、第2方向も、標識12の画像中での形状と標識12の傾きとの相関関係を明示したテーブルに基づいて、推定されてもよい。
【0160】
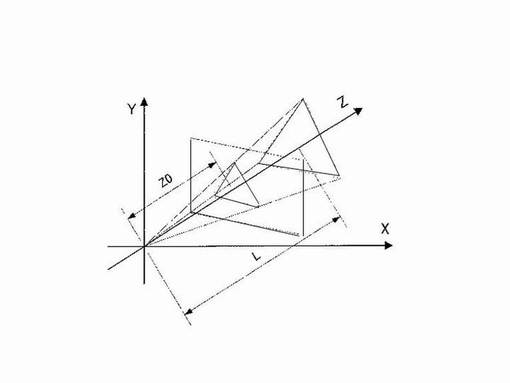
第1方向および第2方向のいずれも、図9に示されるように、ポインタ121、122、123の各点と撮像装置とを結ぶベクトルによって、推定される。次に、撮像装置座標推定部22は、画像中の標識12の面積と本来の標識12の面積との比較から、撮像装置から標識12までの距離を推定する。図10は、距離の推定の状態を示す。図10は、本発明の実施の形態2における撮像装置と標識との距離の推定を説明する模式図である。
【0161】
図10より明らかな通り、撮像装置は、線形を保ったまま標識12を撮像するので、撮像装置から標識12までの距離は、標識12の撮像装置の位置における面積(既知である固有の面積)と画像中で算出される標識12の面積との比較によって推定される。
【0162】
撮像装置座標推定部22は、第1画像における標識12の面積を算出した上で既知の面積と比較して、第1撮像装置13aから標識12までの距離を第1距離として推定する。同様に、撮像装置座標推定部22は、第2画像における標識12の面積を算出した上で既知の面積と比較して、第2撮像装置13bから標識12までの距離を第2距離として推定する。
【0163】
標識12を基準とした第1撮像装置13aの方向と距離が分かれば、第1撮像装置13aの画像中における2次元座標が、標識12を基準としたグローバルな3次元座標に変換される。すなわち、第1位置の3次元座標の値が得られる。同様に、標識12を基準とした第2撮像装置13bの方向と距離が分かれば、第2撮像装置13bの画像中における2次元座標が、標識12を基準としたグローバルな3次元座標に変換される。
【0164】
このことから、撮像装置座標推定部22は、第1方向と第1距離とから第1位置の3次元座標の値を推定し、第2方向と第2距離と空第2位置の3次元座標の値を推定する。
【0165】
(特定点座標推定部)
撮像装置座標推定部22は、特定点座標推定部43に、第1位置と第2位置の3次元座標の値を出力する。特定点座標推定部23は、この第1位置と第2位置の3次元座標の値に基づいて、所定領域110の特定点の3次元座標の値を推定する。
【0166】
図11は、本発明の実施の形態3における特定点座標の推定を説明する写真である。図11で示される画像は、標識12と一緒に撮像された施工対象物100を含んでおり、施工対象物100において、枠囲いされた面積を算出する対象である所定領域110を含んでいる。
【0167】
所定領域110は、任意に定まる複数の特定点を含んでいる。所定領域110は、特定点の3次元座標が分かれば、その面積が算出される。図11においては、所定領域110は、方形の領域であり、所定領域110の4つの頂点が、4つの特定点151、152、153、154として特定されている。特定点は、任意に定められれば良いが、面積算出の容易性から、所定領域110の頂点であることが好ましい。あるいは所定領域110の外枠の辺上の任意の点と頂点とが組み合わされて、特定点が定められても良い。
【0168】
実際には、表示手段に表示されている画像(図11に例示される画像)上で、使用者が任意の点を特定点として選択する。
【0169】
特定点座標推定部23は、特定点151、152、153、154のそれぞれに対して、第1位置からの方向と第2位置からの方向のそれぞれを推定する。例えば、一つの特定点151に対する第1位置からの方向と第2位置からの方向を推定する。このとき、第1位置と第2位置とは、それぞれ3次元座標の値を有しているので、この3次元座標の値に基づいて、特定点151への方向が推定される。更に、特定点座標推定部23は、第1位置からの方向と第2位置からの方向の交点の3次元座標の値を求める。交点の3次元座標の値が、求めるべき特定点151の3次元座標の値である。
【0170】
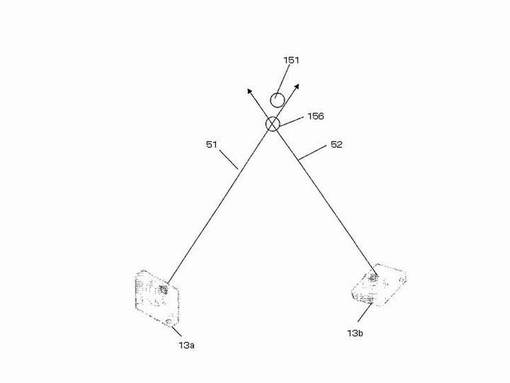
図12に特定点の3次元座標の推定の状態を示す。図12は、本発明の実施の形態2における特定点の3次元座標の推定を説明する模式図である。
【0171】
図12に示されるように、第1撮像装置13a(第1位置)から特定点151への方向を示す線51と第2撮像装置13b(第2位置)から特定点151への方向を示す線52とが描かれる。図12より明らかな通り、線51と線52とは、ある位置で交わる。この位置が、交点156である。線51は、第1画像に写っている特定点151と第1位置とを結ぶ線であり、線52は、第2画像に写っている特定点151と第2位置とを結ぶ線である。特定点151は、撮像された角度や位置によって、単一の画像だけでは、その3次元座標は正確に求まらない。これに対して、撮像角度が異なる複数の画像によって、それぞれの画像における特定点151への方向の共通項(交点)が得られる。この交点156は、単一の画像だけの場合よりも特定点151の位置に近い位置となりうる。
【0172】
このように、第1画像と第2画像のそれぞれにおいて、第1位置から特定点を結ぶ線と、第2位置から特定点を結ぶ線とを算出し、それぞれの線同士の交点156を算出することで、特定点の3次元座標(第1位置と第2位置が有する3次元座標と共通の座標)が求まる。交点156が、特定点151の座標位置となる。
【0173】
特定点座標推定部23は、残りの特定点152、153、154の3次元座標の値も求める。
【0174】
なお、ここでは、第1画像と第2画像の2つの画像に基づいて、特定点の3次元座標を求める処理を説明したが、3以上の画像に基づいて(すなわち、第3位置に配置される第3撮像装置にも基づいて)特定点の3次元座標の値を算出しても良い。
【0175】
なお、特定点は、所定領域110を囲む外枠上のいくつかの点でもよいし、外枠の辺が特定点の集まりであるとして、辺を選択して、多数の特定点を選択したことにしてもよい。いずれにしても、特定点の数が多いほど、後述の算出44での所定領域110の面積算出の精度が高まる。
【0176】
また、特定点座標推定部23は、第1位置からの直線と第2位置からの直線との交点を、特定点の位置として推定しても良いが、第1位置から特定点までの方向と距離によって、まず第1位置に基づく特定点の3次元座標の値(第1特定座標とする)を推定し、ついで、第2位置から特定点までの方向と距離によって、第2位置に基づく特定点の3次元座標の値(第2特定座標とする)を推定した上で、第1特定座標と第2特定座標とに基づいて、特定点の3次元座標の値を推定しても良い。
【0177】
このとき、特定点を含む施工対象物100(所定領域110)までの距離は、第1位置や第2位置から標識12までの距離と略同一であると考えればよい。方向は、特定点として選択した位置と第1位置(第2位置)の座標との角度で定まる。
【0178】
このとき、第1特定座標と第2特定座標が一致する場合には、第1特定座標と第2特定座標の値が、特定点の3次元座標の値として推定される。第1特定座標と第2特定座標とが不一致の場合には、実施の形態2で説明するように、第1特定座標と第2特定座標との近接位置が、特定点を近似する位置として定められる。
【0179】
このように、特定点座標推定部23は、特定点の3次元座標を推定し、推定結果を算出手段24に出力する。
【0180】
なお、特定点座標推定部23は、ハードウェアで実現されても、ソフトウェアで実現されても、ハードウェアとソフトウェアの混在で実現されても良い。
【0181】
(算出部)
次に、算出部24について説明する。算出部24は、特定点座標推定部23で推定された、所定領域110を模る特定点の3次元座標の値に基づいて、所定領域110の面積を算出する。
【0182】
複数の特定点は、共通の3次元座標の値を有している。複数の特定点によって囲まれる所定領域110は、3次元座標によって、その面積が算出できる。3次元座標の値によって、所定領域110を形成する各辺の長さや辺同士が形成する角度が算出されるので、この長さと角度を用いて、算出部24は、所定領域110の面積を算出できる。
【0183】
ここで、算出部24は、領域を形成する点の3次元座標に基づいて領域の面積を算出する種々の公知技術や周知技術を利用できる。これらは、種々の公知技術や周知技術を参考にすればよいので、説明を割愛する。
【0184】
また、施工補助装置1は、表示手段を備えており、面積算出手段2が算出した面積が表示されても良い。実際の面積算出作業では、使用者は、コンピュータや専用装置のキー入力装置を用いて、第3記憶部11に記憶されている画像を読み出す。このとき、読み出し部21が動作して第3記憶部11に記憶されている画像を読み出す。読み出された画像は、例えば図7に示されるような第1画像と第2画像である。使用者は、第1画像および第2画像において、標識12のポインタのそれぞれをマウスやポインティングデバイスを用いてドラッグする。このドラッグによって、撮像装置座標推定部22が作動して、第1画像を撮像した位置である第1位置の3次元座標の値と、第2画像を撮像した位置である第2位置の3次元座標の値と、が推定される。
【0185】
次に使用者は、図11に示されるように、第1画像もしくは第2画像中の所定領域110を特定する特定点151、152、153、154を、画像中においてマウスやポインティングデバイスを用いてドラッグする。このドラッグによって、特定点座標推定手段が作動して、特定点151、152、153、154の3次元座標の値が推定される。更には、算出部24が作動して、特定点151、152、153、154で形成される所定領域110の面積が算出される。いずれも、画像上でのマウスやポインティングデバイスによるドラッグでは、画像中の座標値が決定されることによるものである。
【0186】
このように、施工補助装置1が汎用のパーソナルコンピュータや専用装置に実装されている場合には、使用者は表示された画像において、必要となる点(標識12のポインタや所定領域110の特定点)を指定するだけで、所定領域110の面積を算出できる。
【0187】
また、面積算出手段2は、面積算出の精度を上げるために所定領域110の第1画像および第2画像の撮像角度と異なる角度の第3画像を用いてもよい。このときには、所定領域110の第3画像によって得られる第3位置の3次元座標の値をも用いて、面積算出手段2は、所定領域110の面積を算出する。
【0188】
特定点座標推定部23は、第1位置および第2位置から特定点の3次元座標を推定する。このとき、第1から特定点に向けて延伸する直線と第2位置から特定点に向けて延伸する直線との交点を、特定点の位置として推定する。このとき第1位置および第2位置の2つの位置からの交点だけでなく、更に第3位置に基づくことで、特定点の3次元座標を、高い精度で推定できる。すなわち、異なる角度からの3以上の撮像画像に基づいて、特定点座標推定部23は、特定点の3次元座標を高い精度で推定できる。
【0189】
このように、2つの撮像位置からだけでなく、3以上の撮像位置からの特定点の3次元座標の推定によって、所定領域110の面積が高い精度で算出される。
【0190】
ここで、各撮像位置から特定点へ形成される各直線が、一つの点で交差せずにねじれの関係になることが生じうる。第1位置から特定点への直線は、画像中において選択された特定点と第1位置との方向と距離によって定まり、第2位置から特定点への直線は、画像中において選択された特定点と第2位置との方向と距離によって定まる。このとき、特定点は、平面である画像中において使用者が選択した位置を示し、3次元において一意に定まる本来の特定点と同じ位置となるとは限らない。このため、第1位置から特定点(画像中で選択された特定点)へ形成される直線と第2位置から特定点(画像中で選択された特定点)へ形成される直線とが、交差しないことが生じうる。
【0191】
ねじれが生じる場合には、近似によって特定点の3次元座標を推定する。
【0192】
近似は、単純な近似や従量平均による近似などが用いられる。第1位置から特定点に向けて延伸する直線と第2位置から特定点に向けて延伸する直線の交点と、第2位置から特定点に向けて延伸する直線と第3位置から特定点に向けて延伸する直線の交点との離隔間隔に基づいて、近似を行うことで、特定点を近似できる。重み付け平均での近似でも良い。
【0193】
面積算出手段2は、特定点の推定精度に基づいて、算出する面積の誤差率および面積の誤差範囲の少なくとも一方を算出することも好適である。
【0194】
特定点座標推定部23は、第1位置から特定点への直線と第2位置から特定点への直線とが交差しない場合には、交差しないことによって生じる不一致量を算出する。あるいは、第1特定座標と第2特定座標との不一致量を算出する。
【0195】
第1位置から特定点への直線と第2位置から特定点への直線とが交差しない場合には、それぞれの直線の離隔量が生じる。特定点座標推定部23は、第1位置からの直線と第2位置からの直線とが近接する位置において、近接点を算出する。このとき、近接点を算出する位置における、2つの直線同士の離隔量が算出される。この離隔量が大きいことは、特定点の近似位置として算出される近接点の算出精度は低く、離隔量が小さいことは、特定点の近似位置として算出される近接点の算出精度が高いことを示す。言い換えると、特定点の推定精度を示す。特定点の3次元座標の推定精度が高いことは、算出手段44が算出する面積の算出精度が高いことを示す。逆に、特定点の3次元座標の推定精度が低いことは、算出部24が算出する面積の算出精度が低いことを示す。
【0196】
特定点座標推定部23は、この離隔量を不一致量として算出する。
【0197】
あるいは、特定点座標推定部23が、第1位置から特定点までの方向と距離によって定めた第1特定座標と第2位置から特定点までの方向と距離によって定めた第2特定座標(あるいは第3特定座標以降も含めて)とに基づいて、特定点の3次元座標を推定する場合には、第1特定座標の値と第2特定座標の値の差分値を不一致量として算出する。
【0198】
算出部24は、この不一致量に基づいて、算出する所定領域の面積の誤差率を算出する。例えば、算出部24は、不一致量と算出された面積の乗算によって、面積の誤差率を算出する。あるいは、不一致量を絶対値ではなく、レベル値(不一致量によって、レベル1〜レベル5までの段階評価としておく)と面積の値との関係によって誤差率を算出する。例えば、面積が所定範囲内であるときに、不一致量がレベル1である場合には、誤差率を1%と定義し、不一致量がレベル2である場合には、誤差率を2%と定義する。
【0199】
あるいは、算出した面積を、「**平方メートルから○○平方メートルの範囲である」とのように、面積の誤差範囲を明示して算出しても良い。誤差範囲が明示されることで、利用者の便宜がますます高まるからである。
【0200】
以上のように、特定点座標推定部23は不一致量を算出し、算出部24は誤差率を算出する。算出された誤差率は、算出された面積と共に表示手段で表示される。誤差率が表示されることによって、使用者の便宜が高まる。
【0201】
以上のような面積算出手段2を備えることによって、施工補助装置1は、所定領域110の画像のみでその面積を算出できるので、施工対象物100の施工特性を容易に算出できる。また、標識12を含む施工対象物100の画像を用意するだけで、施工補助装置1が設置されるオフィスや様々な場所において施工特性を算出できるようになる。このため、使用上十分な精度であるが、事前予測として必要な程度の施工特性を早期に得ることができるようになる。この結果、施工業者は、入札や施工開始前の入札において、容易かつ早期に事前見積を行うことができる。
【0202】
(実施の形態3)
【0203】
次に、実施の形態3について説明する。
【0204】
実施の形態1〜2で説明した施工補助装置1は、施工特性を算出できる方法として、あるいはこの方法を実行できるコンピュータ上で動作可能なプログラムとして実現されても良い。
【0205】
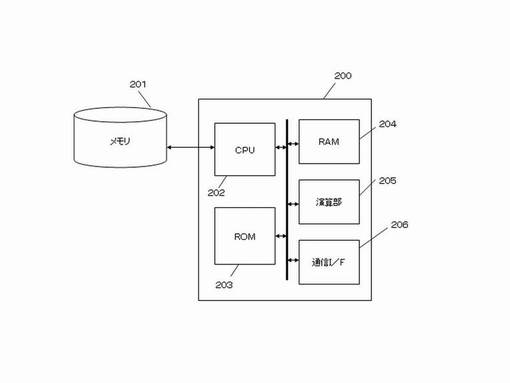
図13は、本発明の実施の形態3におけるコンピュータのブロック図である。コンピュータ200は、実施の形態1、2で説明した施工補助装置1の機能を実現する。コンピュータ200は、汎用コンピュータでもよいし、ワークステーションでもよいし、その一部もしくは全部が専用装置を有する処理装置であってもよい。
【0206】
コンピュータ200は、その内部もしくは外部にメモリ201を備える。メモリ201は、ハードディスクドライブ、半導体メモリ、磁気メモリ、光ディスク、磁気ディスクなど、電子データを記憶できる種々のデバイスを含む。このメモリ201は、実施の形態1〜2で説明した第1記憶部、第2記憶部及び第3記憶部(更には、必要な他の記憶部)の機能を有する。
【0207】
また、コンピュータ200は、プログラムの読み込みおよび命令処理を実行するCPU(中央演算処理装置)202、プログラムを記憶するROM203、演算に必要なデータを読み書きするRAM(ランダムアクセスメモリ)204、CPU202の命令に従って演算を行う演算部205、演算結果や画像のデータのやり取りを行う通信I/F206を備える。また、表示部が備えられていても良い。
【0208】
CPU202は、ROM203に記憶されているプログラムを読み込む。プログラムは、使用者の指示に従って、次の動作を含んでいる。
【0209】
(1)施工対象物100の写真を読み出す読み出しステップ。
(2)施工対象物100の写真に基づいて、所定領域110の面積を算出する算出ステップ。
(3)施工対象物100の周辺情報を、メモリ201に記憶する第1記憶ステップ。
(4)施工要素をメモリ201に記憶させる第2記憶ステップ。
(5)面積値、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出するステップ。
【0210】
この結果、ROM203から、これらの実行手順を含むプログラムを読み出したCPU202は、これらのステップを実行し、施工対象物100の施工特性を算出する。
【0211】
以上のように、施工補助装置1の機能の一部もしくは全部が、コンピュータで動作可能なプログラムで実装されることで、汎用のコンピュータでの実行が可能になったり、幅広い用途で活用できたりするメリットが生じる。
【0212】
以上、実施の形態1〜3で説明された施工補助装置、施工補助方法、コンピュータプログラムは、本発明の趣旨を説明する一例であり、本発明の趣旨を逸脱しない範囲での変形や改造を含む。
【符号の説明】
【0213】
1 施工補助装置
2 面積算出手段
3 第1記憶部
4 第2記憶部
5 算出手段
11 第3記憶部
12 標識
121、122、123 ポインタ
13 撮像装置
100 施工対象物
110 所定領域
200 コンピュータ
201 メモリ
202 CPU
203 ROM
204 RAM
205 演算部
206 通信I/F
【技術分野】
【0001】
本発明は、建築、看板、施工業務など幅広く施工を必要とする業務分野において、デザインや建築物を施工するに当たって必要となるコスト、材料、素材などの要素を簡単に見積もることのできる施工補助装置、施工補助方法に関する。
【背景技術】
【0002】
建物や建造物の壁面におけるデザイン設置場所に、塗装を施したり看板やポスターを設置(すなわちデザインを施す)したりする際に、予めこれらの建物や建造物の壁面の面積が算出されていることが好ましい。壁面の面積が不明であると、どの程度の塗料や材料が必要となるのか、どの程度の面積の看板やポスターを設置できるのか不明であるからである。壁面の面積が予め分かっている場合には、塗装を施したり、看板やポスターを設置したりする工事の効率が向上する。
また、壁面における看板やポスターのみならず、住宅、ビル、工場、商業施設などの建築物を施工する際や、廃棄用建築物を解体したりする場合にも、対象となる建築物のある面の面積(複数の面の面積から概算される体積)が、事前に分かっていることは、施工における見積精度が向上する。
【0003】
設置場所に施すデザインの構成要素(最適な原画、面積、必要となる塗料量、コスト、色度、輝度など)を、早期に予測することは、設置場所にデザインを製作する場合に重要である。屋外の設置場所にデザインを製作する場合にデザインの構成要素が不明であると、作業中に必要な材料が不足したり、余分な材料が余ったりしてコスト面での問題が生じうる。あるいは、製作したデザインが、設置場所の周辺環境や方角によって、十分なデザイン効果を発揮できない問題も生じる。
【0004】
このように、屋外の設置場所にデザインを施す場合には、設置場所の面積、最適な原画、必要となる塗料量、コストなどのデザインの構成要素を、デザインを施す前に把握できることが重要である。特に、設置場所における測量などの大掛かりな作業によらずこれらの構成要素を予め推定できることが必要である。
【0005】
同様に、種々の建築物を施工したり建築物を解体したりする場合には、予め必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさが、予め分かっていることが好適である。実際の施工や解体作業に入ってから、見積と異なるコストが掛かってしまったり、必要な材料が不足したりすることが生じるのは、好ましいことではない。デザインや看板の設置に限らず、建築物の施工や解体においても、必要となる作業量やコストなどについての高い精度での事前予測ができることが好ましい。特に、近年では、コストや施工期間に対する要求が厳しくなっており、種々の要素について、事前に高い精度で見積もることが重要となっている。
【0006】
このように、建築、看板、施工業務など幅広くデザインや施工、建築施工、解体などにおいては、必要となる種々の要素が事前予測できることが重要であり、このためには、施工対象領域の面積(面積に基づく体積)を、簡単かつ高い精度で算出できることが必要となってきている。
【0007】
このような状況において、屋外の施工対象領域の面積を算出するには、危険な作業に基づいて実測を行うか、基準点測量やステレオカメラによる測量を行うのが一般的であった。
【0008】
しかしながら、実測による測量は、危険を伴う上に、対象となる領域が変更になってしまうと、改めて実測による測量作業を必要とする不便を有する。基準点測量やステレオカメラによる作業は、作業時間や作業工数が多くなる上に、測量対象となる建物や建造物を目視できる現場での作業しかできない。
【0009】
これらの現場での作業は、危険度も高く、作業工数も多くなる。例えば、建築物の解体を行うための、作業量、作業機器、コストを見積もるために、解体業者は、様々な現場に何度も熟練作業者を派遣する必要がある。これらの熟練作業者の派遣による業務は見積だけであり、見積後に当該業務を受任できるとは限らない。建築や看板施工でも同様である。コスト削減や期間短縮の要求が高まる中、見積コストを抑えたい欲求もある。
【0010】
このように、実際の施工現場に熟練作業者を派遣して、危険と隣り合わせで施工領域の面積や体積を測定することを減少したい要求が強まっている。このような状況において、撮像装置で撮像された画像を用いて、建物や建造物の壁面を計測する技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−147522号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1は、複数の角度から撮像された画像に含まれる被写体の視差を、調整する技術を開示するだけである。
【0013】
このため、特許文献1は、被写体の面積を算出する技術を開示していない。また、特許文献1の標定基準体は、被写体の位置と面積を算出することに適用が難しい。特に、種々の角度から撮像された画像に含まれる標定基準体の任意の点を、高い精度で識別することが困難であり、事後的に撮像された画像を用いて、被写体の面積算出に必要となるデータを得ることが困難である。撮像された写真の角度や位置によっては、標定基準体の写り方が大きく異なって、標定基準体と被写体との関連性を得ることが難しいからである。
【0014】
また、従来技術は、被写体の面積を十分に算出できないだけでなく、設置場所に最適なデザインを製作するためのデザインの構成要素を算出することができない。この結果、設置場所において実際にデザインを製作する以前に、デザイン製作を効率化するための準備ができない問題がある。特に、デザインオフィスなどの設置場所と離隔した場所にてデザイン製作を効率化する準備が行えない問題がある。
【0015】
本発明は、上記課題に鑑み、建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【課題を解決するための手段】
【0016】
上記課題に鑑み、本発明の施工補助装置は、施工対象物の画像に基づいて、施工対象物の所定領域の面積を算出する面積算出手段と、施工対象物の周辺情報を記憶する第1記憶部と、施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物の施工特性を算出する算出手段と、を備える。
【発明の効果】
【0017】
本発明の施工補助装置は、施工現場における施工対象物を施工したり解体したりする際に必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、機器の種類および大きさの少なくとも一つを含む、施工要素を推測できる。特に、施工補助装置は、施工対象物や施工領域の面積を高い精度で算出できるので、高い精度で施工要素を推測できる。
【0018】
また、施工補助装置は、施工現場における施工対象物や施工領域の写真に基づくだけで、施工対象物や施工領域の面積を算出すると共に、施工要素を推測できるので、現場作業の負担が大幅に減少する。この結果、施工や解体に伴う、施工要素の見積に必要な時間やコストが低減する。
【0019】
また、写真に基づくだけで、施工要素を推測できるので、作業の危険性も低くなり、施工や解体などの業務能力が高まる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施の形態1における施工対象物の模式図である。
【図2】本発明の実施の形態1における施工補助装置のブロック図である。
【図3】本発明の実施の形態2における施工補助装置のブロック図である。
【図4】本発明の実施の形態2における撮像画像に基づく面積算出を示す概念図である。
【図5】本発明の実施の形態2における第1画像と第2画像との撮像を説明する模式図である。
【図6】実施の形態2における面積算出手段の内部ブロック図である。
【図7】本発明の実施の形態2における第1画像と第2画像の写真例である。
【図8】本発明の実施の形態2における標識の正面図である。
【図9】本発明の実施の形態2における撮像装置の方向推定の模式図である。
【図10】本発明の実施の形態2における撮像装置と標識との距離の推定を説明する模式図である。
【図11】本発明の実施の形態3における特定点座標の推定を説明する写真である。
【図12】本発明の実施の形態2における特定点の3次元座標の推定を説明する模式図である。
【図13】本発明の実施の形態3におけるコンピュータのブロック図である。
【発明を実施するための形態】
【0021】
本発明の第1の発明に係る施工補助装置は、施工対象物の画像に基づいて、施工対象物の所定領域の面積を算出する面積算出手段と、施工対象物の周辺情報を記憶する第1記憶部と、施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物の施工特性を算出する算出手段と、を備える。
【0022】
この構成により、施工補助装置は、施工対象物の画像に基づくことで、容易に施工対象物の施工に必要となる施工特性を算出できる。
【0023】
本発明の第2の発明に係る施工補助装置では、第1の発明に加えて、施工対象物は、施工建築物、解体建築物、看板、壁面デザイン、施工外壁および庭園の少なくとも一つを含む。
【0024】
この構成により、施工補助装置は、様々な施工対象物の施工特性を見積もることができる。
【0025】
本発明の第3の発明に係る施工補助装置では、第1又は第2の発明に加えて、施工要素は、施工対象物に基づく素材、工数、期間およびコストの少なくとも一つの単位を含む。
【0026】
この構成により、施工補助装置は、施工特性に関連する施工要素を用いることができる。
【0027】
本発明の第4の発明に係る施工補助装置では、第3の発明に加えて、素材は、建築素材、デザイン素材、塗料および庭園素材の少なくとも一つの単位量を含む。
【0028】
この構成により、施工補助装置は、施工対象物の特徴に応じた施工要素を、施工特性の算出において用いることができる。
【0029】
本発明の第5の発明に係る施工補助装置では、第3又は第4の発明に加えて、工数は、建築工数、解体工数、塗装工数、印刷工数および造園工数の少なくとも一つの単位量を含む。
【0030】
この構成により、施工補助装置は、施工対象物の特徴に応じた施工要素を、施工特性の算出において用いることができる。
【0031】
本発明の第6の発明に係る施工補助装置では、第3から第5のいずれかの発明に加えて、期間は、建築期間、解体期間、塗装期間、印刷期間および造園期間の少なくとも一つの単位量を含む。
【0032】
この構成により、施工補助装置は、施工対象物の特徴に応じた施工要素を、施工特性の算出において用いることができる。
【0033】
本発明の第7の発明に係る施工補助装置では、第3から第6のいずれかの発明に加えて、コストは、建築コスト、解体コスト、塗装コスト、印刷コストおよび造園コストの少なくとも一つの単位量を含む。
【0034】
この構成により、施工補助装置は、施工対象物の特徴に応じたコストを算出できる。
【0035】
本発明の第8の発明に係る施工補助装置では、第1から第7のいずれかの発明に加えて、算出手段は、施工対象物が施工建築物である場合に、算出される所定領域の面積に基づいて、施工対象物に必要となる、建築素材の種類、量、コスト、建築工数、建築期間および建築コストの少なくとも一つを算出する。
【0036】
この構成により、施工補助装置は、施工建築物の施工に必要となる施工特性を、簡便に見積もることができる。
【0037】
本発明の第9の発明に係る施工補助装置では、第1から第7のいずれかの発明に加えて、施工対象物が解体建築物である場合には、面積算出手段は、解体建築物の複数の方向からの所定領域の面積を算出し、算出手段は、複数の面積値に基づいて、解体建築物の解体工数、解体期間および解体コストの少なくとも一つを算出する。
【0038】
この構成により、施工補助装置は、解体建築物の解体に必要となる施工特性を、簡便に見積もることができる。
【0039】
本発明の第10の発明に係る施工補助装置では、第1から第7のいずれかの発明に加えて、施工対象物が看板および壁面デザインの少なくとも一方である場合には、面積算出手段は、看板および壁面デザインを施工する予定領域の面積を算出し、算出手段は、予定領域の面積に基づいて、看板および壁面デザインの少なくとも一方の、デザイン素材、デザイン工数、デザイン期間およびデザインコストの少なくとも一つを算出する。
【0040】
この構成により、施工補助装置は、看板や壁面デザインなどのデザイン建築物の施工に必要となる施工特性を、簡便に見積もることができる。
【0041】
本発明の第11の発明に係る施工補助装置では、第1から第7のいずれかの発明に加えて、施工対象物が、施工外壁である場合には、面積算出手段は、施工対象となる施工外壁の面積を算出し、算出手段は、施工外壁の面積に基づいて、施工外壁の素材、建築工数、建築期間および建築コストの少なくとも一つを算出する。
【0042】
この構成により、施工補助装置は、施工外壁の施工に必要となる施工特性を、簡便に見積もることができる。
【0043】
本発明の第12の発明に係る施工補助装置では、第1から第11のいずれかの発明に加えて、施工対象物の画像を記憶する第3記憶部を更に備え、面積算出手段は、画像に基づいて、所定領域の面積を算出する。
【0044】
この構成により、施工補助装置は、施工対象物の画像のみで、所定領域の面積を算出できる。
【0045】
本発明の第13の発明に係る施工補助装置では、第11又は第12の発明に加えて、画像は、第1撮像装置により撮像された施工対象物と標識とを含む第1画像と、第1撮像装置と異なる角度から第2撮像装置により撮像された施工対象物と標識とを含む第2画像を有し、面積算出手段は、第1撮像装置の第1位置の3次元座標の値と、第2撮像装置の第2位置の3次元座標の値とを推定する撮像装置座標推定部と、第1位置および第2位置に基づいて、施工対象物に含まれる複数の特定点のそれぞれの3次元座標の値を推定する特定点座標推定部と、複数の特定点のそれぞれの3次元座標の値に基づいて、施工対象物の面積を算出する算出手段と、を備え、
【0046】
標識は、3以上のポインタを備える2次元形状を有する。
【0047】
この構成により、面積算出手段は、標識を含む所定領域の写真のみで、所定領域の面積を算出できる。
【0048】
本発明の第14の発明に係る施工補助装置では、第13の発明に加えて、標識は、相互に色度が異なると共に略球形を有する3つのポインタを頂点とする3角形を有する。
【0049】
この構成により、撮像画像の中での標識の区別が容易となり、面積算出手段が、高い精度で所定領域の面積を算出できる。
【0050】
本発明の第15の発明に係る施工補助装置では、第13又は第14の発明に加えて、撮像装置座標推定部は、第1画像に含まれる標識の傾きに基づいて、第1撮像装置の標識に対する方向を第1方向として推定し、第1画像に含まれる標識の面積に基づいて、第1撮像装置と標識との距離を第1距離として推定し、第2画像に含まれる標識の傾きに基づいて、第2撮像装置の標識に対する方向を第2方向として推定し、第2画像に含まれる標識の面積に基づいて、第2撮像装置と標識との距離を第2距離として推定し、第1方向および第1距離に基づいて、第1位置を推定し、第2方向および第2距離に基づいて、第2位置を推定する。
【0051】
この構成により、面積算出手段は、高い精度で、所定領域の面積を算出できる。
【0052】
本発明の第16の発明に係る施工補助装置では、第13から第15のいずれかの発明に加えて、第1位置から得られる特定点の3次元座標の値である第1特定座標と、第2位置から得られる特定点の3次元座標の値である第2特定座標と、が一致しない場合には、特定点座標推定部は、第1特定座標および第2特定座標から、特定点の3次元座標の値を近似する。
【0053】
この構成により、面積算出手段は、撮像画像の写りが悪い場合でも、所定領域の面積を算出できる。
【0054】
本発明の第17の発明に係る施工補助装置では、第13から第16のいずれかの発明に加えて、画像は、第3撮像装置によって、第1撮像装置および第2撮像装置のそれぞれと異なる角度から撮像された施工対象物と標識とを含む第3画像を更に有し、撮像装置座標推定部は、第3撮像装置の第3位置の3次元座標の値を推定し、特定点座標推定部は、第1位置、第2位置および第3位置に基づいて、施工対象物に含まれる複数の特定点のそれぞれの3次元座標の値を推定する。
【0055】
この構成により、面積算出手段は、より精密に、所定領域の面積を算出できる。
【0056】
以下、図面を用いて、本発明の実施の形態について説明する。
【0057】
(実施の形態1)
【0058】
実施の形態1について説明する。
【0059】
(全体概要)
まず、図1、図2を用いて、実施の形態1における施工補助装置の全体概要を説明する。図1は、本発明の実施の形態1における施工対象物の模式図である。図2は、本発明の実施の形態1における施工補助装置のブロック図である。
【0060】
施工対象物100は、施工されたり解体されたりする、不動産、施工建築物、解体建築物、看板、壁面デザイン、施工外壁など、様々なものを含む。多くの場合には、施工対象物100は、屋外に設置される住宅やビルなどであったり、これらの一部であったりする。施工対象物100は、様々な形態や態様の建築物を含み、施工補助装置1は、施工や解体を受ける種々の建築物やこれに類するものを、施工対象物100として幅広く対象とする。
【0061】
図1では、施工対象物100の例として、施工外壁101と看板102が示されている。施工外壁101は、ビルや集合住宅の壁面の一部もしくは全部であって、塗装やデザインが施されたりする対象となる外壁である。看板102は、ビル103の上に設置されるように図1では示されている。あるいは、地上やその他の場所に設置される看板102であってもよい。あるいは、看板102は、ビルなどの外壁の一部に設置される吊り看板やポスターのようなものであってもよい。
【0062】
施工外壁101および看板102のいずれも、屋外である上に、ビルの外壁であったりビルの上であったりなどでの作業を余儀なくされる。実際の施工作業は、屋外である現地での作業となることは仕方がないが、施工作業の事前の見積作業が現地での危険性を伴う作業となることは回避されることが好ましい。一方で、見積の危険な作業を省略したり短縮したりすると、実際の施工作業において、必要な材料や素材が足りなくなったり不要にあまったりすることもある。あるいは、予想の工数や期間を上回ったりすることもある。これらは、当然にコストや信頼性の点で問題を生じさせる。
【0063】
一方で、ビルの施工外壁101の施工における素材やコストなどの施工要素を見積もるためには、施工外壁101の施工対象となる所定領域110の面積が事前に算出される必要がある。あるいは、ビルの屋上に設置される看板102の施工やデザイン作業における不具合を生じさせないためにも、看板102の所定領域110の面積が事前に算出されていることが好ましい。これら施工対象物100の所定領域110が事前に算出されていることで、施工対象物100の施工に必要となる素材やコストなどの施工特性が事前に見積もることができる。事前にこれらの施工要素が見積もられていると、実際の施工作業におけるコスト超過や期間超過などの問題が低減できる。
【0064】
施工補助装置1は、事前に施工対象物に必要となる施工特性を算出して、施工対象物における実際の施工業務を補助できる。施工補助装置1は、面積算出手段2、第1記憶部3、第2記憶部4および算出手段5を備える。
【0065】
面積算出手段2は、施工対象物100の所定領域110の面積を算出する。第1記憶部3は、施工対象物100の周辺情報を記憶する。例えば、第1記憶部3は、施工対象物100に存在する他の建築物、道路状況、日照条件などを、周辺情報として記憶する。第2記憶部4は、施工対象物100の施工に必要となる要素である施工要素を記憶する。第2記憶部4が記憶する施工要素は、施工対象物100を施工する際に見積される施工特性の基本となる単位である。算出手段5は、所定領域110の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する。
【0066】
施工補助装置1は、施工対象物100の所定領域110の面積に基づいて、施工対象物の施工特性を算出できる。この結果、施工対象物100の施工が実際になされる際に、材料の過不足、コスト超過、期間超過などの問題を生じさせにくくなる。
【0067】
(処理動作)
施工補助装置1の処理動作を説明する。
【0068】
施工補助装置1は、使用者による指示に従って動作を開始する。まず、施工補助装置1に対する動作指示を受けて、面積算出手段2は、施工対象物100の画像などに基づいて、施工対象物100の所定領域110の面積を算出する。
【0069】
所定領域110は、施工対象物100において実際に施工を受ける領域である。施工を受ける領域である所定領域110に対して、施工が施されたり、デザインが施されたり、塗装や印刷が施される。あるいは、所定領域110に基づいて算出されたり推測されたりする体積や外形を有する施工対象物100に、建築や解体が施されたりする。これ等の施工や解体における施工特性が、予め見積もられていることが、施工における種々の問題発生防止には好適である。この施工特性を見積もるには、所定領域110の面積が算出されていることが必要である。面積算出手段2は、施工対象物100の画像などに基づいて、所定領域110の面積を算出でき、この算出した面積値を、算出手段5に出力する。
【0070】
第1記憶部3は、施工対象物100の周辺情報を記憶しており、この周辺情報を算出手段5に出力する。施工対象物100の施工特性は、所定領域110の面積だけでなく、周辺環境にも依存する可能性がある。例えば、施工対象物100が看板102であって算出したい施工特性が施工期間である場合に、看板102の周辺に多数の建物があると、作業に困難性が生じたり塗料の乾燥に遅れが生じたりする。このような困難性や遅れは、施工期間への影響を生じさせる。このため、算出手段5において施工期間に関する施工特性を算出する場合には、算出手段5は、周辺情報を加味することが好適である。
【0071】
第1記憶部3は、面積算出手段2で用いられる施工対象物100の画像に基づいて、周辺情報を抽出して記憶する。例えば、第1記憶部3は、施工対象物100に関する画像を読み込み、施工対象物100の周辺における他の建物、交通、道路状況、天候などに関する部分を抽出する。この抽出された部分に基づいて、周辺情報を整理して、これらを第1記憶部3が記憶する。このため、第1記憶部3は、周辺の建物、交通、道路状況、天候などの周辺情報を記憶でき、算出手段5に出力する。
【0072】
第2記憶部4は、施工対象物100の施工に必要となる要素である施工要素を記憶している。施工要素は、施工特性に関連している。言い換えれば、施工要素は、施工特性の一単位であると考えることが適当である。例えば、施工要素は、施工対象物に基づく素材、工数、期間およびコストの少なくとも一つの単位を含む。すなわち、素材の単位や工数の単位を、施工要素は、含む。施工要素に対して、面積算出手段2で算出された面積値が加味されることで、施工対象物100に必要な施工要素の合計である施工特性が定まる。
【0073】
第2記憶部4は、施工対象物100として考えられる種々の建築物に対応する施工要素を予測に基づいて記憶していることでもよい。あるいは、第2記憶部4は、施工対象物100の個々の特性に応じて、使用者によって入力された施工要素を記憶しても良い。あるいは、施工対象物100のアップデートに応じて施工要素がアップデートされ、このアップデートされた施工要素を記憶しても良い。
【0074】
第2記憶部4は、施工要素を算出手段5に出力する。この結果、算出手段5は、施工要素を用いて、施工特性を算出できる。
【0075】
算出手段5は、面積算出手段2から得られる所定領域の面積値、第1記憶部3から得られる周辺情報および第2記憶部4から得られる施工要素の少なくとも2つに基づいて、施工対象物100における施工特性を算出する。すなわち、施工対象物100が実際に施工等される場合に必要となる各種特性が、事前に見積りできるようになる。
【0076】
例えば、面積算出手段2で算出された面積値に、施工要素である素材とその単価が乗算されることで、施工対象物100の所定領域におけるデザイン塗装コストが算出される。このデザイン塗装コストが算出されていれば、看板102や施工外壁101にデザイン画を施工する業者は、事前に高い精度で施工コストを見積もることができる。この結果、業者は、見積ミスによる不利益を回避できるようになる。もちろん、算出手段5は、周辺情報に基づいて、必要となる塗料の量の調整分を考慮して施工コストを算出しても良い。
【0077】
以上のように、施工補助装置1は、施工対象物100の所定領域の面積、周辺情報、施工要素に基づくことで、施工や解体に必要となる施工特性を、高い精度で算出できる。結果として施工に必要な種々の見積が高い精度で行われるようになり、施工における種々の不具合を未然防止できる。
【0078】
なお、面積算出手段2による面積値の出力、第1記憶部3による周辺情報の出力および第2記憶部4による施工要素の出力は、並列に行われても良いし、順次処理で行われても良い。また、面積算出手段2や第1記憶部3などが、主体的に、算出手段5に情報やデータを出力しても良いし、算出手段5がこれ等の要素から情報やデータを読み出すことでも良い。
【0079】
次に、各部の詳細について説明する。
【0080】
(面積算出手段)
面積算出手段2は、種々の手順と手法で、施工対象物100の所定領域110の面積を算出する。所定領域110の全体の面積を算出しても良いし、一部の面積を算出しても良い。また、同じ施工対象物100のある方向からみた所定領域110と別の方向から見た別の所定領域110の面積を算出しても良い。あるいは、同じ所定領域110について異なる角度から見える面積を算出しても良い。
【0081】
面積算出手段2は、所定領域110の撮像画像に基づいて所定領域110の面積を算出する。所定領域110の撮像画像によって、所定領域110に含まれる特定点の3次元座標が推定されるので、所定領域110の面積を算出できる。
【0082】
面積算出手段2は、所定領域110に含まれる(特に、その外周に位置する)複数の特定点の3次元座標によって、所定領域110の面積を算出する。面積算出手段2は、施工補助装置1に組み込まれる専用の回路、専用の半導体集積回路、専用のソフトウェア、汎用の回路、汎用の半導体集積回路、汎用のソフトウェアなどの少なくとも一つによって実現されれば良い。もちろん、汎用CPU上で動作するソフトウェアと必要となるハードウェアとの組み合わせで実現されても良い。
【0083】
(第1記憶部)
【0084】
第1記憶部3は、施工対象物の周辺情報を記憶する。
【0085】
周辺情報は、施工対象物100の周辺の建築物・交通状態、施工対象物100の材質、方角、角度、高さなどの少なくとも一つの情報を含む。加えて、施工対象物100の平均的な天気、平均気温、平均照度、平均日照時間などの気候に関する情報や、施工対象物100周辺の地図情報、施工対象物100周辺の人口動向などの情報を含んでいても良い。周辺情報は、施工対象物100に施工される壁面デザインや施工外壁の特徴を決定できるからである。
【0086】
第1記憶部3は、記憶する周辺情報を算出手段5に出力する。あるいは、算出手段5が、第1記憶部3に記憶される周辺情報を読み出す。また、第1記憶部3は、面積算出手段2が算出した面積値を記憶しても良い。
【0087】
第1記憶部3は、施工補助装置1が備えるハードディスクドライブ、光ディスク、磁気ディスク、CD−ROM、DVD−ROM、USBメモリ、半導体メモリ、光メモリ、磁気メモリなど、データを電気信号として記憶できる種々の記憶可能なデバイスを含む。また、施工補助装置1が予め備えているこれらの記憶可能なデバイスが、第1記憶部3として用いられても良いし、施工補助装置1が、汎用のパーソナルコンピュータを利用する場合には、パーソナルコンピュータが備えるハードディスクドライブや内部メモリなどが、第1記憶部3として用いられても良い。
【0088】
なお、第1記憶部3は、内部のアドレスがバンク分割されており、周辺情報が所定のジャンルに分類された上で、バンク毎に記憶されても良い。バンク毎に分類されていることで、算出手段5による周辺情報の読み出し速度が速くなり、算出手段5による算出速度が向上するからである。
【0089】
また、第1記憶部3は、第2記憶部4と共通のデバイスであっても良いし、別体のデバイスであっても良い。更には、第1記憶部3は、施工補助装置1が必要とする他の記憶部と共通のデバイスの一部であっても良い。
【0090】
(第2記憶部)
第2記憶部4は、施工対象物100の施工に必要となる要素である施工要素を記憶する。施工要素は、施工対象物100を施工する際に必要となる施工特性を算出するための要素・単位となるものである。施工要素は、施工対象物100に基づく素材、工数、期間およびコストの少なくとも一つの単位を含む。第2記憶部4は、これらの施工要素を算出手段5に出力することで(あるいは、算出手段5がこれらの施工要素を読み出すことで)算出手段5における施工特性の算出を実現できる。
【0091】
施工要素における素材は、建築素材、デザイン素材、塗料および庭園素材の少なくとも一つの単位量を含む。これらの素材のいずれかの情報を、第2記憶部4が記憶することで、算出手段5は、施工対象物100の特性に応じた素材に関する施工特性を算出できる。すなわち、算出手段5は、施工対象物100に用いられるのに好適な素材を算出できる。
【0092】
あるいは、施工要素における工数は、建築工数、解体工数、塗装工数、印刷工数および造園工数の少なくとも一つの単位量を含む。これらの工数のいずれかの情報を、第2記憶部4が記憶することで、算出手段5は、施工対象物100の特性に応じた工数に関する施工特性を算出できる。すなわち、算出手段5は、施工対象物100に必要となる建築工数や解体工数を算出できる。
【0093】
また、施工要素における期間は、建築期間、解体期間、塗装期間、印刷期間および造園期間の少なくとも一つの単位量を含む。これらの期間のいずれかの情報を、第2記憶部4が記憶することで、算出手段5は、施工対象物100の期間に関する施工特性を算出できる。
【0094】
同様に、施工要素におけるコストは、建築コスト、解体コスト、塗装コスト、印刷コストおよび造園コストの少なくとも一つの単位量を含む。これらのコストのいずれかの情報を、第2記憶部4が記憶することで、算出手段5は、施工対象物100に必要となるコストに関する施工特性を算出できる。
【0095】
以上のように、第2記憶部4は、施工要素を記憶することで、施工対象物100の事前見積として必要となる施工特性の、高い精度での算出を可能とする。第2記憶部4は、第1記憶部3と同様に、施工補助装置1が備えるハードディスクドライブ、光ディスク、磁気ディスク、CD−ROM、DVD−ROM、USBメモリ、半導体メモリ、光メモリ、磁気メモリなど、データを電気信号として記憶できる種々の記憶可能なデバイスを含む。
【0096】
(算出手段)
算出手段5は、施工特性を算出する。施工特性は、施工対象物100の施工の事前に見積もられておくことが好適な種々の特性である。これらの施工特性が事前に高い精度で見積もられていることで、実際の施工に移行した後で、材料の不足、期間の超過、コストの超過などの問題が生じにくい。これらの問題が後から生じないことで、施工業者は、安心して施工や解体を行うことができる。もちろん、見積に要する負担も減少するので、入札等への参加もしやすくなる。
【0097】
(施工建築物)
算出手段5は、施工対象物100が施工建築物である場合に、算出される所定領域の面積に基づいて、施工対象物100に必要となる、建築素材の種類、量、コスト、建築工数、建築期間および建築コストの少なくとも一つを算出する。施工対象物100が、例えばビル、住居、事業場などの施工される建築物である場合には、この施工対象物100の建築に必要となる素材、建築期間、建築コストなどが、事前に見積もられていることが好ましい。このとき、施工対象物100の外形が大まかにできていれば、外形の画像等に基づいて、所定領域110の面積を算出できる。所定領域110の設定の仕方によって、所定領域110の面積によって、施工対象物100全体の指標となる面積値を得ることができる。
【0098】
算出手段5は、面積算出手段2で算出された面積値によって、施工対象物100全体の指標となる大きさを得ることができる。算出手段5は、第2記憶部4から施工要素を読み出して、この施工要素と面積値とを乗算することで、施工特性を算出する。例えば、施工要素の一つである建築期間の単位量を面積値に乗算することで、施工対象物100の建築期間を算出できる。このとき、所定領域110の設定の仕方によって、乗算で得られる建築期間は、施工対象物100の全ての建築期間であったり、一部の建築期間であったりする。いずれの場合でも、建築物に関する建築期間の指標となる。
【0099】
同様に、算出手段5は、建築コストの単位量に面積値を乗算することで、施工対象物100の建築コスト(全体であるか一部であるか)を算出できる。建築コストが事前に算出されれば、施工業者にとっては当然に便利である。
【0100】
(解体建築物)
施工対象物100が解体建築物である場合には、面積算出手段2は、解体建築物の複数の方向からの所定領域の面積を算出する。複数の方向からの面積値が算出されていることで、解体建築物の全体(体積)が推定できる。算出手段5は、これらの複数の面積値に基づいて、解体建築物の解体工数、解体期間および解体コストの少なくとも一つを算出する。解体建築物の解体作業において、このような施工特性が事前に見積もられていることで、解体作業における不具合が生じにくくなる。
【0101】
また、面積算出手段2は、施工対象物100の画像などに基づいて、所定領域110の面積を算出できるので、見積のために、現場に何度も足を運ぶ必要も無い。当然に危険な測量作業も減少する。算出手段5は、解体建築物に係る面積値とこれを応用した体積値に、施工要素に含まれる単位量を乗算することで、解体期間や解体コストを算出できる。この算出手順は、施工対象物100が施工建築物である場合と同じである。
【0102】
(看板もしくは壁面デザイン)
施工対象物100が看板および壁面デザインの少なくとも一方である場合には、面積算出手段2は、看板および壁面デザインを施工する予定領域の面積を算出する。すなわち、面積算出手段2が算出する所定領域は、施工を行う予定である予定領域である。算出手段5は、予定領域の面積に基づいて、看板および壁面デザインの少なくとも一方の、デザイン素材、デザイン工数、デザイン期間およびデザインコストの少なくとも一つを算出する。
【0103】
他の場合と同様に、算出手段5は、面積値に必要な施工要素の単位量を乗算することで、デザイン工数やデザインコストを算出する。また、素材の単位量に基づいて、デザインに必要となる素材の種類、量、コストを算出することもできる。看板や壁面デザインについての、これらの施工特性が事前に見積もられていることで、実際の施工時における種々の不具合を防止できる。
【0104】
(施工外壁)
施工対象物100が、施工外壁である場合には、面積算出手段2は、施工対象となる施工外壁の面積を算出する。次いで、算出手段5は、施工外壁の面積に基づいて、施工外壁の素材、建築工数、建築期間および建築コストの少なくとも一つを算出する。これらが算出されて事前に見積もられることで、施工外壁の実際の施工における不具合を防止できる。当然ながら、施工外壁の施工に必要なコストや期間が見積もられれば、施工業者は、入札および施工が容易となる。
【0105】
以上のように、算出手段5は、様々な施工対象物100に対応した施工特性を算出できる。
【0106】
施工特性は、面積値に基づいて算出されるので、使用上十分な精度を有している。加えて、施工対象物100の画像等に基づくだけで面積値が算出されるので、簡便かつ早く施工特性が算出される。すなわち、施工補助装置1は、使用上十分な精度であって簡便かつ早く施工特性を算出する必要がある分野に好適に用いられる。例えば、非常に緻密な装置やアルゴリズムによって、詳細の面積値を算出すれば、最終的に算出される施工特性の精度を精密にすることも可能である。しかしながら、施工特性を精密に算出することは、作業負担、作業コスト、設備コスト、人的コストの面で不利である。多くの施工対象物100は、精密な施工特性を求めることは少なく、早期かつ簡便に使用上十分な施工特性を必要としている。
【0107】
実施の形態1における施工補助装置1は、このような施工対象物100に最適に合致している。
【0108】
(実施の形態2)
【0109】
次に、実施の形態2について説明する。実施の形態2では、面積算出手段2が第3記憶部に記憶されている画像に基づいて、所定領域110の面積値を算出する機能について説明する。
【0110】
図3は、本発明の実施の形態2における施工補助装置のブロック図である。施工補助装置1は、第3記憶部11を更に備える。第3記憶部11は、施工対象物100の画像を記憶する。面積算出手段2は、第3記憶部11が記憶する施工対象物100の画像を読み出すことで、所定領域110の面積を算出する。
【0111】
なお、第3記憶部11は、第1記憶部3や第2記憶部4と同じ要素に含まれても良い。第1〜第3は、便宜上の名称であって、要素としての特段に物理的に区別することではない。
【0112】
面積算出手段2は、第3記憶部11から得られる施工対象物100の画像に基づいて、所定領域110の面積を算出する。このとき、施工対象物100の画像を撮像する撮像手段をさらに備え、この撮像手段によって撮像された画像が、第3記憶部11に記憶される。
【0113】
(撮像画像に基づく、面積の算出)
図4は、本発明の実施の形態2における撮像画像に基づく面積算出を示す概念図である。施工補助装置1は、撮像装置13によって得られる施工対象物100の画像に基づいて、実施の形態1で説明した施工対象物100の施工に必要となる施工特性を算出する。
【0114】
標識12は、3つのポインタ121、122,123を備える基準部材であり、標識12を基準とした撮像装置13の3次元座標から、面積算出手段2は、所定領域110の面積を算出する。標識12が施工対象物100と同じ撮像領域に設置されて、撮像装置13が、施工対象物100と標識12とを合わせて撮像する。
【0115】
撮像装置13は、カメラ、デジタルカメラ、デジタルビデオカメラ、携帯端末、携帯電話機などの撮像機能を有する電子機器や電子装置である。標識12を含む施工対象物100の画像を撮像した撮像装置13は、画像を施工補助装置1に送信する。このとき、有線通信や無線通信で送信しても良いし、記憶媒体によって転送しても良い。
【0116】
図4では、施工補助装置1は、パーソナルコンピュータを実現例として示している。施工補助装置1は、このようなパーソナルコンピュータや汎用装置で実現されても良いし、専用装置によって実現されても良い。
【0117】
まず標識12が施工対象物100に近接して設置され、撮像装置13が標識12と所定領域110とを同時に撮影する。このとき、撮像装置13は、標識12と施工対象物100とを含む第1画像と、第1画像と異なる角度から撮像される標識12と施工対象物100とを含む第2画像(あるいは、第3画像以上を)を撮像する。このとき、撮像される第1画像および第2画像は、施工対象物100を含むと共に面積を算出したい所定領域110も含んでいる。これは、以下においても同様である。
【0118】
図5に、第1撮像装置13aと第2撮像装置13bが、施工対象物100と標識12とを撮像する様子を示す。図5は、本発明の実施の形態2における第1画像と第2画像との撮像を説明する模式図である。第1撮像装置13aは、所定の方向から施工対象物100と標識12とを撮像して、第1画像を得る。一方、第2撮像装置13bは、第1撮像装置13aと異なる角度から、施工対象物100と標識12とを撮像して、第2画像を得る。
【0119】
第3記憶部11もしくは面積算出手段2は、撮像装置13から第1画像と第2画像を得る。第1画像および第2画像は、上述の通り、施工対象物100と標識12とを含んでいる。第1撮像装置13aと第2撮像装置13bとを、施工現場であるフィールドで作業する作業者が持参して対象となる施工対象物100の第1画像と第2画像とを撮像する。もちろん、1枚の第1画像と第2画像とを撮像するだけでなく、多くの情報を得るために複数の第1画像と第2画像とを撮像してもよい。また、フィールド作業者は、第1画像と第2画像の撮像だけでなく、施工対象物100の周辺情報についても収拾する。
【0120】
第1画像と第2画像は、データ転送、ネットワーク転送などによって、第3記憶部11(あるいは、面積算出手段2の備えるメモリ)に転送される。この作業の際に、周辺情報が第1記憶部3に転送されても良い。結果として、第3記憶部11に施工対象物100の第1画像と第2画像とが記憶され、第1記憶部3に施工対象物100の周辺情報が記憶される。
【0121】
面積算出手段2は、読み出し部21、撮像装置座標推定部22、特定点座標推定部23、算出部24を備えている。図6は、実施の形態2における面積算出手段の内部ブロック図である。ここで、読み出し部21は、第3記憶部11に含まれる要素でも良い。図6は、第1撮像装置13aと第2撮像装置13bとによって撮像された第1画像と第2画像とを用いて所定領域110の面積を算出するのに必要な要素を示している。
【0122】
読み出し部21は、第3記憶部11に記憶されている第1画像と第2画像とを読み出す。このとき、読み出し部21は、画像を1枚ずつ読み出しもよいし、一度に複数の画像を読み出しても良い。読み出し部21は、読み出した画像のデータを撮像装置座標推定部22に出力する。
【0123】
撮像装置座標推定部22は、第1画像を撮像した撮像装置(第1撮像装置13a)の3次元座標で表される第1位置と、第2画像を撮像した撮像装置(第2撮像装置13b)の3次元座標で表される第2位置とを推定する。なお、第1撮像装置13aと第2撮像装置13bとは、説明の便宜上「第1、第2」と記載されているだけで、第1撮像装置13aと第2撮像装置13bとは、同一の装置であっても異なる装置であってもかまわない。この点は、本明細書の全体に渡って同様である。
【0124】
また、他の画像があれば、撮像装置座標推定部22は、第3撮像装置が配置された第3位置の3次元座標(第n撮像装置が配置された第n位置の3次元座標も)を推定する。撮像装置座標推定部22は、画像の中に含まれる標識12の傾きに基づいて、撮像装置と標識12との方向を推定する。ついで、画像の中に含まれる標識12の面積に基づいて、撮像装置と標識12との距離を推定する。撮像装置座標推定部22は、この方向と距離を用いて、撮像装置の位置の3次元座標を推定する。なお、標識12は、その大きさ、形状、面積などが既知である。
【0125】
撮像装置座標推定部22によって、2次元座標であるローカル座標を有する撮像装置の座標が、標識12を基準とした3次元座標であるグローバル座標に変換される。なお、撮像装置座標推定部22は、複数の位置における撮像装置のそれぞれの3次元座標の値を推定する。結果として、異なる位置にある撮像装置それぞれの3次元座標の値が推定される。
【0126】
第1位置と第2位置が推定されると、第1位置と第2位置に基づいて、特定点座標推定部23が、所定領域110に含まれる複数の特定点のそれぞれの3次元座標を、推定する。所定領域110に含まれる複数の特定点の3次元座標が定まれば、面積を算出することができるようになる。
【0127】
特定点座標推定部23は、推定された撮像装置の3次元座標を基準に、所定領域110に含まれる特定点の3次元座標を推定する。所定領域110は、その面積を算出したい領域であり、特定点座標推定部23は、この領域の外縁に沿った複数の点を特定点として決定する。これら複数の特定点のグローバルな3次元座標の値が求まれば、これら特定点で囲まれる領域の面積が算出できる。
【0128】
撮像装置座標推定部23によって、撮像装置の3次元座標の値は推定されている。特定点の3次元座標は、撮像装置の3次元座標に基づいて推定される。すなわち、複数の撮像装置からある特定点の方向を推定し、複数の撮像装置から推定された特定点の方向の重複点が、特定点の3次元座標の値となる。このように、特定点の一つの3次元座標の値は、複数の撮像装置の位置に基づいて算出される。特定点座標推定部23は、複数の特定点のそれぞれに推定の作業を行うことで、複数の特定点のそれぞれの3次元座標の値を算出する。
【0129】
特定点座標推定部23は、推定した複数の特定点の3次元座標の値を、算出部24に出力する。
【0130】
算出部24は、特定点座標推定部43より受け取った特定点の3次元座標に基づいて、所定領域110の面積を算出できる。なお、算出部24は、所定領域110において、特定点によって囲まれる所定の領域の面積を算出する。算出部24で算出された面積値が、算出手段5に出力されて、施工特性の算出がなされる。
【0131】
以上のように、施工対象物100に標識12を含む異なる位置からの複数の画像によって、面積算出手段2は、所定領域110の面積を算出できる。特に、標識12と施工対象物100とは、撮像した画像に写っているので、第3記憶部11が画像を記憶していれば、いかなる場所においても、面積算出手段2は、面積を算出できる。また、標識と共に写りこんでいる施工対象物100であれば、その特定点の選び方によって、様々な領域の面積を算出できるので、使用者は、フレキシブルに所定領域110を選択して、その面積値を算出できる。
【0132】
なお、面積算出手段2は、施工対象物100と標識12とが写っている画像について、より様々な位置や角度から撮像された多くの画像に基づくことで、面積算出の精度を向上させることができる。
【0133】
次に、面積算出手段2に含まれる要素の詳細および面積算出の詳細について説明する。
【0134】
(第1画像、第2画像)
図7に第1画像と第2画像の例を示す。図7は、本発明の実施の形態2における第1画像と第2画像の写真例である。第1画像および第2画像のそれぞれは、施工対象物100であるブロック塀と三角形の形状を有する標識12とを含んでいる。また、施工対象物100の一部が線で枠囲いされているが、この枠囲いされている領域が、面積算出の対象となる所定領域110である。
【0135】
図7の第1画像と第2画像が示すように、第1画像と第2画像とは、異なる角度から施工対象物100と標識12とを有している。図7に示される第1画像と第2画像とが第3記憶部11に記憶されている。
【0136】
(読み出し部)
読み出し部21は、第3記憶部11に記憶されている画像を読み出す。例えば、読み出し部21は、HDDやDVDドライブなどに設けられているデータの読取装置およびこの読取装置を駆動するソフトウェアなどを含む。第3記憶部11が半導体メモリや光ディスクである場合には、読み出し部21は、読み出し対象の画像が含まれているアドレスを指定し、当該アドレスに対応するデータを読み出す。
【0137】
読み出し部21は、第3記憶部11から画像を読み出せればよく、その実現手段や構成は、公知技術や一般的に用いられる技術でよい。また、読み出し部21は、データの読み出しだけに限定されるものではなく、データの書き込みを行っても良い。
【0138】
読み出し部21は、図7に示される第1画像と第2画像とを読み出す。読み出し部21は、読み出した第1画像と第2画像とのデータを、撮像装置座標推定部22に出力する。
【0139】
なお、読み出し部21は、ハードウェアで実現されてもソフトウェアで実現されも、ハードウェアとソフトウェアの混在で実現されても良い。
【0140】
(撮像装置座標推定部)
撮像装置座標推定部22は、第1撮像装置13aの配置される第1位置と、第2撮像装置13bの配置される第2位置の、グローバル座標に基づく3次元座標の値を推定する。撮像装置座標推定部22は、標識12を利用して、第1位置と第2位置の3次元座標の値を推定する。第1位置と第2位置の3次元座標の値に基づいて、所定領域110の特定点の3次元座標の値が推定できるようになる。
【0141】
ここで、撮像装置座標推定部22は、第1画像に写っている標識12の傾きに基づいて、第1撮像装置13aの標識12に対する方向を第1方向として推定する。ついで、撮像装置座標推定部22は、第1画像中における標識12の面積に基づいて、第1撮像装置13aと標識12との距離を第1距離として推定する。
【0142】
同様に、撮像装置座標推定部22は、第2画像に写っている標識12の傾きに基づいて、第2撮像装置13bの標識12に対する方向を第2方向として推定する。ついで、撮像装置座標推定部22は、第2画像中における標識12の面積に基づいて、第2撮像装置13bと標識12との距離を第2距離として推定する。
【0143】
なお、撮像装置座標推定部22は、具体的には標識12が含む特定の部位(ポインタ)を基準として、撮像装置と標識12との方向を推定する。このため、標識12は、ポインタを有していることが必要である。特には、ポインタから傾きを検出する必要があるので、標識12は3個以上のポインタを有している必要がある。
【0144】
撮像装置座標推定部22は、第1方向および第1距離に基づいて、第1位置の3次元座標の値を推定し、第2方向および第2距離に基づいて、第2位置の3次元座標の値を推定する。このとき、撮像装置座標推定部22は、第1画像および第2画像に写っている標識12の傾きと面積を利用する。このため、標識12は、画像に写っている状態だけでその傾きと面積とを容易に算出できる構成を有していることが好ましい。
【0145】
例えば、標識12は、その形状や面積が既知であって、画像中で標識12の全体形状や画像中における面積が算出しやすい形状を有していることが好適である。加えて、標識12は、画像のみで、標識12の傾きが判別しやすい形状を有していることが好適である。
【0146】
(標識について)
図8は、本発明の実施の形態2における標識の正面図である。上述のように、画像中で標識12を認識しやすい一例を、図8は示している。勿論、図8に示される形状や構成に、標識12の形状や構成が限られるものではない。
【0147】
標識12は、3以上のポインタを有している。図8では、標識12は、3つのポインタ121、122、123を有している。3つのポインタ121、122、123同士を結ぶ棒状部材によって、標識12は、3つのポインタ121、122、123を頂点とする略三角形の形状を有する。このとき、標識12を形成する三角形は、既知である所定の面積を有している。標識12の本来の面積が既知であることで、画像における標識12の面積(すなわち、三角形の面積)が算出されれば、算出された面積と本来の面積との縮尺率から、撮像装置から標識12までの距離が算出できる。
【0148】
また、標識12が図8に示されるように三角形を有していることで、最少の頂点数により面積を有するので、標識12が画像の中で判別しやすい上に面積や大きさが判別されやすい。
【0149】
このように、標識12が、3つのポインタ121、122、123を頂点とする三角形を有することで、(1)画像中における標識12が容易かつ確実に判別できる、(2)標識12の画像中における面積を算出しやすい、(3)画像中での標識12の面積と、実際の標識12の面積との比較から、撮像装置から標識12までの距離が容易に算出できる、とのメリットを生じる。
【0150】
また、撮像装置座標推定部22は、画像中の標識12の傾きから、撮像装置と標識12との方向を推定する。例えば、図7の第1画像では、標識12は、正面から見て右側に傾いている。一方、図7の第2画像では、標識12は、正面から見て左側に傾いている。第1画像と第2画像のいずれであっても、標識12がどのように傾いているかは、容易に判別できる。撮像装置座標推定部22にとって、標識12の傾きを容易かつ確実に判別できることは、撮像装置と標識12との方向を推定する上で重要である。
【0151】
ここで、3つのポインタ121、122、123のそれぞれは、相互に色度が異なっていることも好適である。相互に色度が異なっていることで、画像中における標識12の判別が確実になる。特に、撮像装置座標推定部22は、ポインタ121、122、123のそれぞれを基準として、撮像装置と標識12との方向を推定するので、ポインタ121、122、123のそれぞれは、確実に区別できることが好ましい。ポインタ121、122、123のそれぞれの色度が相互に異なることで、画像中に写っているポインタ121、122、123のそれぞれが、個々に区別できるようになる。
【0152】
また、3つのポインタ121、122、123のそれぞれは、略球形を有することが好ましい。撮像装置座標推定部22は、標識12に含まれるポインタ121、122、123のそれぞれを基準として撮像装置との方向を推定する。このため、標識12の画像中での写りこみの態様の如何にかかわらず、撮像装置座標推定部22は、画像中のポインタを確実に認識できる必要がある。このとき、ポインタ121、122、123のそれぞれが略球形であることで、標識12がどのような角度から撮像されていてもポインタ121、122、123の形状に変化がない(画像に写っている形状において)。このため、撮像装置座標推定部22は、画像の中から確実に標識12を認識できる。
【0153】
実際には、表示された第1画像や第2画像において、使用者がポインタを選択することで、ポインタと撮像装置との方向や距離が算出される。このとき、撮像されている角度によってポインタの形状が異なってしまっては、正確な選択ができない。ポインタが略球形を有していることで、撮像されている角度によることなく(異なる画像によることなく)、ポインタを正確に選択できる。
【0154】
このように、ポインタ121、122、123が異なる色度を有していたり、略球形を有していたりすることで、(1)画像中におけるポインタが容易かつ確実に判別できる、(2)画像の撮像角度の違いによっても、ポインタを一義的に選択できる、(3)ポインタが正確に選択できることで、標識12に対する撮像装置の方向が確実に推定できる、メリットが生じる。
【0155】
撮像装置座標推定部22は、第1画像に写っているポインタ121、122、123のそれぞれから、第1撮像装置13aの標識12に対する方向を推定する。同様に、撮像装置座標推定部22は、第2画像に写っているポインタ121、122、123のそれぞれから、第2撮像装置13bの標識12に対する方向を推定する。
【0156】
図9は、撮像装置の標識12に対する方向を推定する状態を示している。図9は、本発明の実施の形態2における撮像装置の方向推定の模式図である。
【0157】
標識12は、3つのポインタ121、122、123を有しており、第1位置に配置される第1撮像装置13aは、第1画像を撮像し、第2位置に配置される第2撮像装置13bは、第2画像を撮像する。
【0158】
撮像装置座標推定部22は、第1画像において、ポインタ121、ポインタ122およびポインタ123を選択して、ポインタ121、122、123のそれぞれで構成される平面(標識12の三角形の平面)の傾きを算出する。この傾きによって、第1撮像装置13aの標識12に対する第1方向が推定される。なお、標識12の画像中での形状と標識12の傾きとの相関関係を明示したテーブルに基づいて、撮像装置座標推定部22は、第1方向を推定しても良い。
【0159】
同様に、撮像装置座標推定部22は、第2画像において、ポインタ121、122、123を選択して、ポインタ121、122、123のそれぞれによって構成される平面(標識12の三角形の平面)の傾きを算出する。この傾きによって、第1撮像装置13bの標識12に対する第2方向が推定される。なお、第2方向も、標識12の画像中での形状と標識12の傾きとの相関関係を明示したテーブルに基づいて、推定されてもよい。
【0160】
第1方向および第2方向のいずれも、図9に示されるように、ポインタ121、122、123の各点と撮像装置とを結ぶベクトルによって、推定される。次に、撮像装置座標推定部22は、画像中の標識12の面積と本来の標識12の面積との比較から、撮像装置から標識12までの距離を推定する。図10は、距離の推定の状態を示す。図10は、本発明の実施の形態2における撮像装置と標識との距離の推定を説明する模式図である。
【0161】
図10より明らかな通り、撮像装置は、線形を保ったまま標識12を撮像するので、撮像装置から標識12までの距離は、標識12の撮像装置の位置における面積(既知である固有の面積)と画像中で算出される標識12の面積との比較によって推定される。
【0162】
撮像装置座標推定部22は、第1画像における標識12の面積を算出した上で既知の面積と比較して、第1撮像装置13aから標識12までの距離を第1距離として推定する。同様に、撮像装置座標推定部22は、第2画像における標識12の面積を算出した上で既知の面積と比較して、第2撮像装置13bから標識12までの距離を第2距離として推定する。
【0163】
標識12を基準とした第1撮像装置13aの方向と距離が分かれば、第1撮像装置13aの画像中における2次元座標が、標識12を基準としたグローバルな3次元座標に変換される。すなわち、第1位置の3次元座標の値が得られる。同様に、標識12を基準とした第2撮像装置13bの方向と距離が分かれば、第2撮像装置13bの画像中における2次元座標が、標識12を基準としたグローバルな3次元座標に変換される。
【0164】
このことから、撮像装置座標推定部22は、第1方向と第1距離とから第1位置の3次元座標の値を推定し、第2方向と第2距離と空第2位置の3次元座標の値を推定する。
【0165】
(特定点座標推定部)
撮像装置座標推定部22は、特定点座標推定部43に、第1位置と第2位置の3次元座標の値を出力する。特定点座標推定部23は、この第1位置と第2位置の3次元座標の値に基づいて、所定領域110の特定点の3次元座標の値を推定する。
【0166】
図11は、本発明の実施の形態3における特定点座標の推定を説明する写真である。図11で示される画像は、標識12と一緒に撮像された施工対象物100を含んでおり、施工対象物100において、枠囲いされた面積を算出する対象である所定領域110を含んでいる。
【0167】
所定領域110は、任意に定まる複数の特定点を含んでいる。所定領域110は、特定点の3次元座標が分かれば、その面積が算出される。図11においては、所定領域110は、方形の領域であり、所定領域110の4つの頂点が、4つの特定点151、152、153、154として特定されている。特定点は、任意に定められれば良いが、面積算出の容易性から、所定領域110の頂点であることが好ましい。あるいは所定領域110の外枠の辺上の任意の点と頂点とが組み合わされて、特定点が定められても良い。
【0168】
実際には、表示手段に表示されている画像(図11に例示される画像)上で、使用者が任意の点を特定点として選択する。
【0169】
特定点座標推定部23は、特定点151、152、153、154のそれぞれに対して、第1位置からの方向と第2位置からの方向のそれぞれを推定する。例えば、一つの特定点151に対する第1位置からの方向と第2位置からの方向を推定する。このとき、第1位置と第2位置とは、それぞれ3次元座標の値を有しているので、この3次元座標の値に基づいて、特定点151への方向が推定される。更に、特定点座標推定部23は、第1位置からの方向と第2位置からの方向の交点の3次元座標の値を求める。交点の3次元座標の値が、求めるべき特定点151の3次元座標の値である。
【0170】
図12に特定点の3次元座標の推定の状態を示す。図12は、本発明の実施の形態2における特定点の3次元座標の推定を説明する模式図である。
【0171】
図12に示されるように、第1撮像装置13a(第1位置)から特定点151への方向を示す線51と第2撮像装置13b(第2位置)から特定点151への方向を示す線52とが描かれる。図12より明らかな通り、線51と線52とは、ある位置で交わる。この位置が、交点156である。線51は、第1画像に写っている特定点151と第1位置とを結ぶ線であり、線52は、第2画像に写っている特定点151と第2位置とを結ぶ線である。特定点151は、撮像された角度や位置によって、単一の画像だけでは、その3次元座標は正確に求まらない。これに対して、撮像角度が異なる複数の画像によって、それぞれの画像における特定点151への方向の共通項(交点)が得られる。この交点156は、単一の画像だけの場合よりも特定点151の位置に近い位置となりうる。
【0172】
このように、第1画像と第2画像のそれぞれにおいて、第1位置から特定点を結ぶ線と、第2位置から特定点を結ぶ線とを算出し、それぞれの線同士の交点156を算出することで、特定点の3次元座標(第1位置と第2位置が有する3次元座標と共通の座標)が求まる。交点156が、特定点151の座標位置となる。
【0173】
特定点座標推定部23は、残りの特定点152、153、154の3次元座標の値も求める。
【0174】
なお、ここでは、第1画像と第2画像の2つの画像に基づいて、特定点の3次元座標を求める処理を説明したが、3以上の画像に基づいて(すなわち、第3位置に配置される第3撮像装置にも基づいて)特定点の3次元座標の値を算出しても良い。
【0175】
なお、特定点は、所定領域110を囲む外枠上のいくつかの点でもよいし、外枠の辺が特定点の集まりであるとして、辺を選択して、多数の特定点を選択したことにしてもよい。いずれにしても、特定点の数が多いほど、後述の算出44での所定領域110の面積算出の精度が高まる。
【0176】
また、特定点座標推定部23は、第1位置からの直線と第2位置からの直線との交点を、特定点の位置として推定しても良いが、第1位置から特定点までの方向と距離によって、まず第1位置に基づく特定点の3次元座標の値(第1特定座標とする)を推定し、ついで、第2位置から特定点までの方向と距離によって、第2位置に基づく特定点の3次元座標の値(第2特定座標とする)を推定した上で、第1特定座標と第2特定座標とに基づいて、特定点の3次元座標の値を推定しても良い。
【0177】
このとき、特定点を含む施工対象物100(所定領域110)までの距離は、第1位置や第2位置から標識12までの距離と略同一であると考えればよい。方向は、特定点として選択した位置と第1位置(第2位置)の座標との角度で定まる。
【0178】
このとき、第1特定座標と第2特定座標が一致する場合には、第1特定座標と第2特定座標の値が、特定点の3次元座標の値として推定される。第1特定座標と第2特定座標とが不一致の場合には、実施の形態2で説明するように、第1特定座標と第2特定座標との近接位置が、特定点を近似する位置として定められる。
【0179】
このように、特定点座標推定部23は、特定点の3次元座標を推定し、推定結果を算出手段24に出力する。
【0180】
なお、特定点座標推定部23は、ハードウェアで実現されても、ソフトウェアで実現されても、ハードウェアとソフトウェアの混在で実現されても良い。
【0181】
(算出部)
次に、算出部24について説明する。算出部24は、特定点座標推定部23で推定された、所定領域110を模る特定点の3次元座標の値に基づいて、所定領域110の面積を算出する。
【0182】
複数の特定点は、共通の3次元座標の値を有している。複数の特定点によって囲まれる所定領域110は、3次元座標によって、その面積が算出できる。3次元座標の値によって、所定領域110を形成する各辺の長さや辺同士が形成する角度が算出されるので、この長さと角度を用いて、算出部24は、所定領域110の面積を算出できる。
【0183】
ここで、算出部24は、領域を形成する点の3次元座標に基づいて領域の面積を算出する種々の公知技術や周知技術を利用できる。これらは、種々の公知技術や周知技術を参考にすればよいので、説明を割愛する。
【0184】
また、施工補助装置1は、表示手段を備えており、面積算出手段2が算出した面積が表示されても良い。実際の面積算出作業では、使用者は、コンピュータや専用装置のキー入力装置を用いて、第3記憶部11に記憶されている画像を読み出す。このとき、読み出し部21が動作して第3記憶部11に記憶されている画像を読み出す。読み出された画像は、例えば図7に示されるような第1画像と第2画像である。使用者は、第1画像および第2画像において、標識12のポインタのそれぞれをマウスやポインティングデバイスを用いてドラッグする。このドラッグによって、撮像装置座標推定部22が作動して、第1画像を撮像した位置である第1位置の3次元座標の値と、第2画像を撮像した位置である第2位置の3次元座標の値と、が推定される。
【0185】
次に使用者は、図11に示されるように、第1画像もしくは第2画像中の所定領域110を特定する特定点151、152、153、154を、画像中においてマウスやポインティングデバイスを用いてドラッグする。このドラッグによって、特定点座標推定手段が作動して、特定点151、152、153、154の3次元座標の値が推定される。更には、算出部24が作動して、特定点151、152、153、154で形成される所定領域110の面積が算出される。いずれも、画像上でのマウスやポインティングデバイスによるドラッグでは、画像中の座標値が決定されることによるものである。
【0186】
このように、施工補助装置1が汎用のパーソナルコンピュータや専用装置に実装されている場合には、使用者は表示された画像において、必要となる点(標識12のポインタや所定領域110の特定点)を指定するだけで、所定領域110の面積を算出できる。
【0187】
また、面積算出手段2は、面積算出の精度を上げるために所定領域110の第1画像および第2画像の撮像角度と異なる角度の第3画像を用いてもよい。このときには、所定領域110の第3画像によって得られる第3位置の3次元座標の値をも用いて、面積算出手段2は、所定領域110の面積を算出する。
【0188】
特定点座標推定部23は、第1位置および第2位置から特定点の3次元座標を推定する。このとき、第1から特定点に向けて延伸する直線と第2位置から特定点に向けて延伸する直線との交点を、特定点の位置として推定する。このとき第1位置および第2位置の2つの位置からの交点だけでなく、更に第3位置に基づくことで、特定点の3次元座標を、高い精度で推定できる。すなわち、異なる角度からの3以上の撮像画像に基づいて、特定点座標推定部23は、特定点の3次元座標を高い精度で推定できる。
【0189】
このように、2つの撮像位置からだけでなく、3以上の撮像位置からの特定点の3次元座標の推定によって、所定領域110の面積が高い精度で算出される。
【0190】
ここで、各撮像位置から特定点へ形成される各直線が、一つの点で交差せずにねじれの関係になることが生じうる。第1位置から特定点への直線は、画像中において選択された特定点と第1位置との方向と距離によって定まり、第2位置から特定点への直線は、画像中において選択された特定点と第2位置との方向と距離によって定まる。このとき、特定点は、平面である画像中において使用者が選択した位置を示し、3次元において一意に定まる本来の特定点と同じ位置となるとは限らない。このため、第1位置から特定点(画像中で選択された特定点)へ形成される直線と第2位置から特定点(画像中で選択された特定点)へ形成される直線とが、交差しないことが生じうる。
【0191】
ねじれが生じる場合には、近似によって特定点の3次元座標を推定する。
【0192】
近似は、単純な近似や従量平均による近似などが用いられる。第1位置から特定点に向けて延伸する直線と第2位置から特定点に向けて延伸する直線の交点と、第2位置から特定点に向けて延伸する直線と第3位置から特定点に向けて延伸する直線の交点との離隔間隔に基づいて、近似を行うことで、特定点を近似できる。重み付け平均での近似でも良い。
【0193】
面積算出手段2は、特定点の推定精度に基づいて、算出する面積の誤差率および面積の誤差範囲の少なくとも一方を算出することも好適である。
【0194】
特定点座標推定部23は、第1位置から特定点への直線と第2位置から特定点への直線とが交差しない場合には、交差しないことによって生じる不一致量を算出する。あるいは、第1特定座標と第2特定座標との不一致量を算出する。
【0195】
第1位置から特定点への直線と第2位置から特定点への直線とが交差しない場合には、それぞれの直線の離隔量が生じる。特定点座標推定部23は、第1位置からの直線と第2位置からの直線とが近接する位置において、近接点を算出する。このとき、近接点を算出する位置における、2つの直線同士の離隔量が算出される。この離隔量が大きいことは、特定点の近似位置として算出される近接点の算出精度は低く、離隔量が小さいことは、特定点の近似位置として算出される近接点の算出精度が高いことを示す。言い換えると、特定点の推定精度を示す。特定点の3次元座標の推定精度が高いことは、算出手段44が算出する面積の算出精度が高いことを示す。逆に、特定点の3次元座標の推定精度が低いことは、算出部24が算出する面積の算出精度が低いことを示す。
【0196】
特定点座標推定部23は、この離隔量を不一致量として算出する。
【0197】
あるいは、特定点座標推定部23が、第1位置から特定点までの方向と距離によって定めた第1特定座標と第2位置から特定点までの方向と距離によって定めた第2特定座標(あるいは第3特定座標以降も含めて)とに基づいて、特定点の3次元座標を推定する場合には、第1特定座標の値と第2特定座標の値の差分値を不一致量として算出する。
【0198】
算出部24は、この不一致量に基づいて、算出する所定領域の面積の誤差率を算出する。例えば、算出部24は、不一致量と算出された面積の乗算によって、面積の誤差率を算出する。あるいは、不一致量を絶対値ではなく、レベル値(不一致量によって、レベル1〜レベル5までの段階評価としておく)と面積の値との関係によって誤差率を算出する。例えば、面積が所定範囲内であるときに、不一致量がレベル1である場合には、誤差率を1%と定義し、不一致量がレベル2である場合には、誤差率を2%と定義する。
【0199】
あるいは、算出した面積を、「**平方メートルから○○平方メートルの範囲である」とのように、面積の誤差範囲を明示して算出しても良い。誤差範囲が明示されることで、利用者の便宜がますます高まるからである。
【0200】
以上のように、特定点座標推定部23は不一致量を算出し、算出部24は誤差率を算出する。算出された誤差率は、算出された面積と共に表示手段で表示される。誤差率が表示されることによって、使用者の便宜が高まる。
【0201】
以上のような面積算出手段2を備えることによって、施工補助装置1は、所定領域110の画像のみでその面積を算出できるので、施工対象物100の施工特性を容易に算出できる。また、標識12を含む施工対象物100の画像を用意するだけで、施工補助装置1が設置されるオフィスや様々な場所において施工特性を算出できるようになる。このため、使用上十分な精度であるが、事前予測として必要な程度の施工特性を早期に得ることができるようになる。この結果、施工業者は、入札や施工開始前の入札において、容易かつ早期に事前見積を行うことができる。
【0202】
(実施の形態3)
【0203】
次に、実施の形態3について説明する。
【0204】
実施の形態1〜2で説明した施工補助装置1は、施工特性を算出できる方法として、あるいはこの方法を実行できるコンピュータ上で動作可能なプログラムとして実現されても良い。
【0205】
図13は、本発明の実施の形態3におけるコンピュータのブロック図である。コンピュータ200は、実施の形態1、2で説明した施工補助装置1の機能を実現する。コンピュータ200は、汎用コンピュータでもよいし、ワークステーションでもよいし、その一部もしくは全部が専用装置を有する処理装置であってもよい。
【0206】
コンピュータ200は、その内部もしくは外部にメモリ201を備える。メモリ201は、ハードディスクドライブ、半導体メモリ、磁気メモリ、光ディスク、磁気ディスクなど、電子データを記憶できる種々のデバイスを含む。このメモリ201は、実施の形態1〜2で説明した第1記憶部、第2記憶部及び第3記憶部(更には、必要な他の記憶部)の機能を有する。
【0207】
また、コンピュータ200は、プログラムの読み込みおよび命令処理を実行するCPU(中央演算処理装置)202、プログラムを記憶するROM203、演算に必要なデータを読み書きするRAM(ランダムアクセスメモリ)204、CPU202の命令に従って演算を行う演算部205、演算結果や画像のデータのやり取りを行う通信I/F206を備える。また、表示部が備えられていても良い。
【0208】
CPU202は、ROM203に記憶されているプログラムを読み込む。プログラムは、使用者の指示に従って、次の動作を含んでいる。
【0209】
(1)施工対象物100の写真を読み出す読み出しステップ。
(2)施工対象物100の写真に基づいて、所定領域110の面積を算出する算出ステップ。
(3)施工対象物100の周辺情報を、メモリ201に記憶する第1記憶ステップ。
(4)施工要素をメモリ201に記憶させる第2記憶ステップ。
(5)面積値、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出するステップ。
【0210】
この結果、ROM203から、これらの実行手順を含むプログラムを読み出したCPU202は、これらのステップを実行し、施工対象物100の施工特性を算出する。
【0211】
以上のように、施工補助装置1の機能の一部もしくは全部が、コンピュータで動作可能なプログラムで実装されることで、汎用のコンピュータでの実行が可能になったり、幅広い用途で活用できたりするメリットが生じる。
【0212】
以上、実施の形態1〜3で説明された施工補助装置、施工補助方法、コンピュータプログラムは、本発明の趣旨を説明する一例であり、本発明の趣旨を逸脱しない範囲での変形や改造を含む。
【符号の説明】
【0213】
1 施工補助装置
2 面積算出手段
3 第1記憶部
4 第2記憶部
5 算出手段
11 第3記憶部
12 標識
121、122、123 ポインタ
13 撮像装置
100 施工対象物
110 所定領域
200 コンピュータ
201 メモリ
202 CPU
203 ROM
204 RAM
205 演算部
206 通信I/F
【特許請求の範囲】
【請求項1】
施工対象物の画像に基づいて、前記施工対象物の所定領域の面積を算出する面積算出手段と、
前記施工対象物の周辺情報を記憶する第1記憶部と、
前記施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶部と、
前記所定領域の面積、前記周辺情報および前記施工要素の少なくとも2以上に基づいて、前記施工対象物の施工特性を算出する算出手段と、を備える、施工補助装置。
【請求項2】
前記施工対象物は、施工建築物、解体建築物、看板、壁面デザイン、施工外壁および庭園の少なくとも一つを含む、請求項1記載の施工補助装置。
【請求項3】
前記施工要素は、前記施工対象物に基づく素材、工数、期間およびコストの少なくとも一つの単位を含む、請求項1又は2記載の施工補助装置。
【請求項4】
前記素材は、建築素材、デザイン素材、塗料および庭園素材の少なくとも一つの単位量を含む、請求項3記載の施工補助装置。
【請求項5】
前記工数は、建築工数、解体工数、塗装工数、印刷工数および造園工数の少なくとも一つの単位量を含む、請求項3又は4記載の施工補助装置。
【請求項6】
前記期間は、建築期間、解体期間、塗装期間、印刷期間および造園期間の少なくとも一つの単位量を含む、請求項3から5のいずれか記載の施工補助装置。
【請求項7】
前記コストは、建築コスト、解体コスト、塗装コスト、印刷コストおよび造園コストの少なくとも一つの単位量を含む、請求項3から6のいずれか記載の施工補助装置。
【請求項8】
前記算出手段は、前記施工対象物が施工建築物である場合に、算出される前記所定領域の面積に基づいて、前記施工対象物に必要となる、建築素材の種類、量、コスト、建築工数、建築期間および建築コストの少なくとも一つを算出する、請求項1から7のいずれか記載の施工補助装置。
【請求項9】
前記施工対象物が解体建築物である場合には、前記面積算出手段は、前記解体建築物の複数の方向からの所定領域の面積を算出し、
前記算出手段は、前記複数の面積値に基づいて、前記解体建築物の解体工数、解体期間および解体コストの少なくとも一つを算出する、請求項1から7のいずれか記載の施工補助装置。
【請求項10】
前記施工対象物が看板および壁面デザインの少なくとも一方である場合には、前記面積算出手段は、前記看板および壁面デザインを施工する予定領域の面積を算出し、
前記算出手段は、前記予定領域の面積に基づいて、前記看板および壁面デザインの少なくとも一方の、デザイン素材、デザイン工数、デザイン期間およびデザインコストの少なくとも一つを算出する、請求項1から7のいずれか記載の施工補助装置。
【請求項11】
前記施工対象物が、施工外壁である場合には、前記面積算出手段は、施工対象となる前記施工外壁の面積を算出し、
前記算出手段は、前記施工外壁の面積に基づいて、前記施工外壁の素材、建築工数、建築期間および建築コストの少なくとも一つを算出する、請求項1から7のいずれか記載の施工補助装置。
【請求項12】
前記施工対象物の画像を記憶する第3記憶部を更に備え、前記面積算出手段は、前記画像に基づいて、前記所定領域の面積を算出する、請求項1から11のいずれか記載の施工補助装置。
【請求項13】
前記画像は、第1撮像装置により撮像された前記施工対象物と標識とを含む第1画像と、前記第1撮像装置と異なる角度から第2撮像装置により撮像された前記施工対象物と前記標識とを含む第2画像を有し、
前記面積算出手段は、
前記第1撮像装置の第1位置の3次元座標の値と、前記第2撮像装置の第2位置の3次元座標の値とを推定する撮像装置座標推定部と、
前記第1位置および前記第2位置に基づいて、前記施工対象物に含まれる複数の特定点のそれぞれの3次元座標の値を推定する特定点座標推定部と、
前記複数の特定点のそれぞれの3次元座標の値に基づいて、前記施工対象物の面積を算出する算出手段と、を備え、
前記標識は、3以上のポインタを備える2次元形状を有する、請求項11又は12記載の施工補助装置。
【請求項14】
前記標識は、相互に色度が異なると共に略球形を有する3つの前記ポインタを頂点とする3角形を有する、請求項13記載の施工補助装置。
【請求項15】
前記撮像装置座標推定部は、
前記第1画像に含まれる前記標識の傾きに基づいて、前記第1撮像装置の前記標識に対する方向を第1方向として推定し、
前記第1画像に含まれる前記標識の面積に基づいて、前記第1撮像装置と前記標識との距離を第1距離として推定し、
前記第2画像に含まれる前記標識の傾きに基づいて、前記第2撮像装置の前記標識に対する方向を第2方向として推定し、
前記第2画像に含まれる前記標識の面積に基づいて、前記第2撮像装置と前記標識との距離を第2距離として推定し、
前記第1方向および前記第1距離に基づいて、前記第1位置を推定し、
前記第2方向および前記第2距離に基づいて、前記第2位置を推定する、請求項13又は14記載の施工補助装置。
【請求項16】
前記第1位置から得られる前記特定点の3次元座標の値である第1特定座標と、前記第2位置から得られる前記特定点の3次元座標の値である第2特定座標と、が一致しない場合には、
前記特定点座標推定部は、前記第1特定座標および前記第2特定座標から、前記特定点の3次元座標の値を近似する、請求項13から15のいずれか記載の施工補助装置。
【請求項17】
前記画像は、第3撮像装置によって、前記第1撮像装置および前記第2撮像装置のそれぞれと異なる角度から撮像された前記施工対象物と前記標識とを含む第3画像を更に有し、
前記撮像装置座標推定部は、前記第3撮像装置の第3位置の3次元座標の値を推定し、
前記特定点座標推定部は、前記第1位置、前記第2位置および前記第3位置に基づいて、前記施工対象物に含まれる複数の特定点のそれぞれの3次元座標の値を推定する、請求項13から16のいずれか記載の施工補助装置。
【請求項18】
第1記憶部と第2記憶部とを備え、
施工対象物の所定領域の面積を算出する面積算出ステップと、
前記施工対象物の周辺情報を記憶する第1記憶ステップと、
前記施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶ステップと、
前記所定領域の面積、前記周辺情報および前記施工要素の少なくとも2以上に基づいて、前記施工対象物の施工特性を算出する算出ステップと、を備える、施工補助方法。
【請求項19】
第1記憶部と第2記憶部とを備えるコンピュータ上で動作可能なコンピュータプログラムであって、
施工対象物の所定領域の面積を算出する面積算出ステップと、
前記施工対象物の周辺情報を記憶する第1記憶ステップと、
前記施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶ステップと、
前記所定領域の面積、前記周辺情報および前記施工要素の少なくとも2以上に基づいて、前記施工対象物の施工特性を算出する算出ステップと、を実行可能なコンピュータプログラム。
【請求項1】
施工対象物の画像に基づいて、前記施工対象物の所定領域の面積を算出する面積算出手段と、
前記施工対象物の周辺情報を記憶する第1記憶部と、
前記施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶部と、
前記所定領域の面積、前記周辺情報および前記施工要素の少なくとも2以上に基づいて、前記施工対象物の施工特性を算出する算出手段と、を備える、施工補助装置。
【請求項2】
前記施工対象物は、施工建築物、解体建築物、看板、壁面デザイン、施工外壁および庭園の少なくとも一つを含む、請求項1記載の施工補助装置。
【請求項3】
前記施工要素は、前記施工対象物に基づく素材、工数、期間およびコストの少なくとも一つの単位を含む、請求項1又は2記載の施工補助装置。
【請求項4】
前記素材は、建築素材、デザイン素材、塗料および庭園素材の少なくとも一つの単位量を含む、請求項3記載の施工補助装置。
【請求項5】
前記工数は、建築工数、解体工数、塗装工数、印刷工数および造園工数の少なくとも一つの単位量を含む、請求項3又は4記載の施工補助装置。
【請求項6】
前記期間は、建築期間、解体期間、塗装期間、印刷期間および造園期間の少なくとも一つの単位量を含む、請求項3から5のいずれか記載の施工補助装置。
【請求項7】
前記コストは、建築コスト、解体コスト、塗装コスト、印刷コストおよび造園コストの少なくとも一つの単位量を含む、請求項3から6のいずれか記載の施工補助装置。
【請求項8】
前記算出手段は、前記施工対象物が施工建築物である場合に、算出される前記所定領域の面積に基づいて、前記施工対象物に必要となる、建築素材の種類、量、コスト、建築工数、建築期間および建築コストの少なくとも一つを算出する、請求項1から7のいずれか記載の施工補助装置。
【請求項9】
前記施工対象物が解体建築物である場合には、前記面積算出手段は、前記解体建築物の複数の方向からの所定領域の面積を算出し、
前記算出手段は、前記複数の面積値に基づいて、前記解体建築物の解体工数、解体期間および解体コストの少なくとも一つを算出する、請求項1から7のいずれか記載の施工補助装置。
【請求項10】
前記施工対象物が看板および壁面デザインの少なくとも一方である場合には、前記面積算出手段は、前記看板および壁面デザインを施工する予定領域の面積を算出し、
前記算出手段は、前記予定領域の面積に基づいて、前記看板および壁面デザインの少なくとも一方の、デザイン素材、デザイン工数、デザイン期間およびデザインコストの少なくとも一つを算出する、請求項1から7のいずれか記載の施工補助装置。
【請求項11】
前記施工対象物が、施工外壁である場合には、前記面積算出手段は、施工対象となる前記施工外壁の面積を算出し、
前記算出手段は、前記施工外壁の面積に基づいて、前記施工外壁の素材、建築工数、建築期間および建築コストの少なくとも一つを算出する、請求項1から7のいずれか記載の施工補助装置。
【請求項12】
前記施工対象物の画像を記憶する第3記憶部を更に備え、前記面積算出手段は、前記画像に基づいて、前記所定領域の面積を算出する、請求項1から11のいずれか記載の施工補助装置。
【請求項13】
前記画像は、第1撮像装置により撮像された前記施工対象物と標識とを含む第1画像と、前記第1撮像装置と異なる角度から第2撮像装置により撮像された前記施工対象物と前記標識とを含む第2画像を有し、
前記面積算出手段は、
前記第1撮像装置の第1位置の3次元座標の値と、前記第2撮像装置の第2位置の3次元座標の値とを推定する撮像装置座標推定部と、
前記第1位置および前記第2位置に基づいて、前記施工対象物に含まれる複数の特定点のそれぞれの3次元座標の値を推定する特定点座標推定部と、
前記複数の特定点のそれぞれの3次元座標の値に基づいて、前記施工対象物の面積を算出する算出手段と、を備え、
前記標識は、3以上のポインタを備える2次元形状を有する、請求項11又は12記載の施工補助装置。
【請求項14】
前記標識は、相互に色度が異なると共に略球形を有する3つの前記ポインタを頂点とする3角形を有する、請求項13記載の施工補助装置。
【請求項15】
前記撮像装置座標推定部は、
前記第1画像に含まれる前記標識の傾きに基づいて、前記第1撮像装置の前記標識に対する方向を第1方向として推定し、
前記第1画像に含まれる前記標識の面積に基づいて、前記第1撮像装置と前記標識との距離を第1距離として推定し、
前記第2画像に含まれる前記標識の傾きに基づいて、前記第2撮像装置の前記標識に対する方向を第2方向として推定し、
前記第2画像に含まれる前記標識の面積に基づいて、前記第2撮像装置と前記標識との距離を第2距離として推定し、
前記第1方向および前記第1距離に基づいて、前記第1位置を推定し、
前記第2方向および前記第2距離に基づいて、前記第2位置を推定する、請求項13又は14記載の施工補助装置。
【請求項16】
前記第1位置から得られる前記特定点の3次元座標の値である第1特定座標と、前記第2位置から得られる前記特定点の3次元座標の値である第2特定座標と、が一致しない場合には、
前記特定点座標推定部は、前記第1特定座標および前記第2特定座標から、前記特定点の3次元座標の値を近似する、請求項13から15のいずれか記載の施工補助装置。
【請求項17】
前記画像は、第3撮像装置によって、前記第1撮像装置および前記第2撮像装置のそれぞれと異なる角度から撮像された前記施工対象物と前記標識とを含む第3画像を更に有し、
前記撮像装置座標推定部は、前記第3撮像装置の第3位置の3次元座標の値を推定し、
前記特定点座標推定部は、前記第1位置、前記第2位置および前記第3位置に基づいて、前記施工対象物に含まれる複数の特定点のそれぞれの3次元座標の値を推定する、請求項13から16のいずれか記載の施工補助装置。
【請求項18】
第1記憶部と第2記憶部とを備え、
施工対象物の所定領域の面積を算出する面積算出ステップと、
前記施工対象物の周辺情報を記憶する第1記憶ステップと、
前記施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶ステップと、
前記所定領域の面積、前記周辺情報および前記施工要素の少なくとも2以上に基づいて、前記施工対象物の施工特性を算出する算出ステップと、を備える、施工補助方法。
【請求項19】
第1記憶部と第2記憶部とを備えるコンピュータ上で動作可能なコンピュータプログラムであって、
施工対象物の所定領域の面積を算出する面積算出ステップと、
前記施工対象物の周辺情報を記憶する第1記憶ステップと、
前記施工対象物の施工に必要となる要素である施工要素を記憶する第2記憶ステップと、
前記所定領域の面積、前記周辺情報および前記施工要素の少なくとも2以上に基づいて、前記施工対象物の施工特性を算出する算出ステップと、を実行可能なコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−88895(P2013−88895A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−226595(P2011−226595)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(509121019)株式会社春田建設 (7)
【出願人】(503445054)マツノデザイン店舗建築株式会社 (4)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(509121019)株式会社春田建設 (7)
【出願人】(503445054)マツノデザイン店舗建築株式会社 (4)
【Fターム(参考)】
[ Back to top ]