
施療機
【課題】足を後方と前方との両側に脛に対して屈伸させることが可能な施療機であり、かつ、その施療機のコンパクト化を可能とする。
【解決手段】施療機Mのストレッチユニット1は、被施療者の足裏83を載せる足載せ面13を有し第1の中心線C1回りに揺動可能でありつま先側部14が中立位置から前後の両方向に移動可能である足裏部材12と、第2の中心線C2回りに揺動可能であり先部22が斜め上下方向に移動可能である揺動部材20と、膨張することにより揺動部材20を第2の中心線C2回りに揺動させるストレッチ用エアセル2LU,2LDと、揺動部材20と足裏部材12との間に介在し揺動部材20の揺動を足裏部材12の揺動に変換する変換部材8とを備えている。
【解決手段】施療機Mのストレッチユニット1は、被施療者の足裏83を載せる足載せ面13を有し第1の中心線C1回りに揺動可能でありつま先側部14が中立位置から前後の両方向に移動可能である足裏部材12と、第2の中心線C2回りに揺動可能であり先部22が斜め上下方向に移動可能である揺動部材20と、膨張することにより揺動部材20を第2の中心線C2回りに揺動させるストレッチ用エアセル2LU,2LDと、揺動部材20と足裏部材12との間に介在し揺動部材20の揺動を足裏部材12の揺動に変換する変換部材8とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被施療者の足首の関節から先の足を、後方と前方との両側に屈伸させることができる施療機に関する。
【背景技術】
【0002】
例えば飛行機内で長時間にわたって同じ姿勢で座っていると、静脈血栓塞栓症を起こす危険性が高くなることが知られているが、その予防策として、足を動かすことが有効である。そこで、被施療者の足を強制的に動かすことのできる装置の開発が望まれており、例えば、特許文献1に記載されたものがある。しかし、この装置では、足首の関節から先の足を、脛に対して後方に屈する方向(アキレス腱が伸びる方向)に運動させることはできても、その反対である足を前方へ伸ばす方向に運動させることはできない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−89672号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
そこで、足を後方と前方との両側に屈伸させるためには、足裏を載せる足裏部材を設け、この足裏部材を前後に揺動させればよいと考えられる。そこで、図11(a)に示しているように、左右方向の中心線94回りに揺動する板状の足裏部材91をフレーム90に設け、この足裏部材91とフレーム90の前壁90aとの間の、つま先側と踵側とのそれぞれにアクチュエータとしてエアセル92,93を設け、図11(b)及び(c)に示しているように、これらを交互に膨張収縮させればよい。エアセル92,93は、エアの給気排気によって膨張収縮するものであり、また、アクチュエータとしてエアセル92,93を採用することで、膨張しても多少変形が可能であるため足への負担を和らげることができる。
【0005】
前記装置の場合、足を伸ばす方向(矢印F)への足裏部材91の可動域を確保するためには、図11(a)の中立状態にある足裏部材91のつま先側91aと、前壁90aとの間には、両者が緩衝しないように前後方向に広いスペース95が必要となり、このため、装置が大型化してしまう。
また、エアセル92,93は、それ自体の剛性が低いため、このような広いスペース95で長いストロークにわたって膨張させる構成には適しておらず、さらに、この足裏部材91を、足を屈する方向(矢印B)に揺動させるためには(図11(c)参照)、つま先側のエアセル92は、前記スペース95よりもさらに前後方向に長いストロークSを有する必要がある。したがって、図11に示した装置を実現させるのは困難である。
【0006】
そこで本発明は、足を後方と前方との両側に屈伸させることが可能であり、しかも、コンパクト化が可能となる施療機を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、被施療者の足首の関節から先の足を中立位置から後方と前方との両側に脛に対して屈伸させるストレッチユニットを備えた施療機であって、前記ストレッチユニットは、フレームと、被施療者の足裏を載せる足載せ面を有し左右方向の第1の中心線回りに揺動可能として前記フレームに取り付けられつま先側部が中立位置から前後の両方向に移動可能である足裏部材と、左右方向の第2の中心線回りに揺動可能として基部が前記フレームに取り付けられ先部が前記つま先側部の移動方向と異なる方向に移動可能である揺動部材と、エアの給気によって膨張することで前記揺動部材を前記第2の中心線回りに揺動させるストレッチ用エアセルを有する駆動装置と、前記揺動部材と前記足裏部材との間に介在し当該揺動部材の揺動を前記足裏部材の揺動に変換する変換部材とを備えたことを特徴とする。
【0008】
本発明によれば、ストレッチ用エアセルが膨張することにより揺動部材は第2の中心線回りに揺動し、変換部材を介して、足裏部材は第1の中心線回りに揺動する。この足裏部材を正逆両方向に揺動させることで、足裏部材のつま先側部は中立位置から前後の両方向に移動し、被施療者の足首の関節から先の足を、中立位置から後方と前方との両側に脛に対して屈伸させることが可能となる。
そして、足裏部材のつま先側部の移動方向である前後方向と異なる方向に、ストレッチ用エアセルによって揺動部材の先部を移動させても、前記変換部材を有していることにより、足裏部材のつま先側部を前後方向に移動させることができる。つまり、ストレッチ用エアセルによる揺動部材の動作方向を、足裏部材のつま先側部の移動方向である前後方向と同じ方向にする必要がない。このため、揺動部材のレイアウトの自由度が高まり、ストレッチユニットをコンパクトに構成することが可能となる。
【0009】
なお、本発明において、中立位置とは、膝から足首までの脚の長手方向と、足首から先にある足の長手方向(足裏の長手方向)とが、直交する状態となる位置である。また、後方及び前方は、被施療者の伸ばした脚の長手方向に沿った方向であり、後方は、脚全体を伸ばした被施療者の腰側の方向であり、前方とは、その反対の方向である。
さらに、本発明では、足首の関節からつま先までを「足」、当該関節から膝側を「脚」と区別している。
【0010】
また、前記施療機は、前後方向に移動して前記ストレッチユニットに対して接離する本体部と、被施療者の脛を前記本体部に拘束する拘束部とを有する拘束ユニットと、前記ストレッチユニット及び前記拘束ユニットの動作を制御する制御装置とを更に備え、前記制御装置は、前記ストレッチユニットにおいて前記足裏部材の前記つま先側部を前方へ移動させている状態で、脛を拘束した前記本体部を当該ストレッチユニットから離れる方向に移動させ、前記足裏部材の前記つま先側部を後方へ移動させている状態で、脛を拘束した前記本体部を当該ストレッチユニットに接近する方向に移動させる制御を行うのが好ましい。
【0011】
この場合、ストレッチユニットにおいて足裏部材のつま先側部を前方へ移動させると、被施療者の足(足首)を前方へ伸ばす運動が行われ、この状態で、脛を拘束した拘束ユニットの本体部をストレッチユニットから離れる方向に移動させると、足から脛までの範囲を広く伸ばすことができ、より効果的な施療(運動)が行われる。
一方、ストレッチユニットにおいて足裏部材のつま先側部を後方へ移動させると、被施療者の足を屈する運動が行われ、アキレス腱を伸ばすことができ、この状態で、脛を拘束した拘束ユニットの本体部をストレッチユニットに接近する方向に移動させることで、踵が足裏部材から離れようとするのを防ぐことができ、足を屈する運動をより効果的に行うことができる。
【0012】
また、前記ストレッチユニットにおいて、前後方向及び左右方向に広がる仮想平面上に前記ストレッチユニットが配置されているとした場合に、前記つま先側部が前方に位置した前傾姿勢にある前記足裏部材と、前記仮想平面との間に形成される空間に、前記ストレッチ用エアセルが膨張可能でかつ前記揺動部材が揺動可能として配置されており、前記揺動部材の前記先部の軌道が、前記前傾姿勢にある足裏部材の踵側部からつま先側部へ向かう方向となるように、当該揺動部材は前記フレームに取り付けられている構成とすることができる。
この場合、前記空間に揺動部材及びストレッチ用エアセルを配置することができ、コンパクトにストレッチユニットを構成することができる。
【0013】
また、前記ストレッチユニットは、前記足載せ面のつま先側に設けられエアの給気によって膨張し被施療者の足先を当該足載せ面から離す方向に押圧する、つま先用エアセルを備えているのが好ましい。
この場合、ストレッチユニットにおいて、足裏部材のつま先側部を後方へ移動させると、被施療者の足を屈する運動が行われ、アキレス腱を伸ばすことができるが、さらに、この運動を行っている状態で、つま先用エアセルを膨張させると、足(足裏)を伸ばす運動を被施療者に与えることが可能となる。
【0014】
また、例えば、足裏部材のつま先側部を後方へ揺動させるために、ストレッチ用エアセルを膨張させ、バネ部材の弾性力(復元力)によって当該つま先側部を前方へ揺動させる構成であってもよいが、前記足裏部材を前記中立位置から正逆両方向に揺動駆動させるために、前記ストレッチ用エアセルは、前記揺動部材を挟んだ両側に配置されており、前記駆動装置は、エアを吐出するポンプ、及び、当該ポンプと前記ストレッチ用エアセルとの間に設けられエアの流れを切り替えるバルブを有し、前記バルブは、前記両側のストレッチ用エアセルを膨張状態で保持するとともに、当該両側のストレッチ用エアセル間でエアの流れを許容している状態に、切り替え可能であるのが好ましい。
この場合、両側のストレッチ用エアセルを膨張状態で保持し、両側のストレッチ用エアセル間でエアの流れを許容している状態とすることで、被施療者が、自らの足の力で足裏部材を揺動させて、揺動部材を介して、一方のストレッチ用エアセルを圧縮させると、当該一方のストレッチ用エアセルから他方のストレッチ用エアセルへとエアが流れ、被施療者は、自力で足を屈伸させることができる。また、ストレッチ用エアセルは膨張状態で保持されているので、前記自力で屈伸させる運動は、負荷が与えられた状態で行われる。
【0015】
また、前記揺動部材が前記ストレッチ用エアセルから駆動力を受けていない非可動状態では、前記足裏部材は、前記つま先側部が最前端に位置する前方ストロークエンドにあり、前記揺動部材が前記ストレッチ用エアセルから駆動力を受けることによって、前記足裏部材を揺動させ、当該足裏部材は、前記つま先側部が最後端に位置する後方ストロークエンドに達し、前記ストレッチ用エアセルは、前記揺動部材を介して、前記足裏部材を前記前方ストロークエンドから前記後方ストロークエンドまで単独により揺動させることができる長さに相当する、膨張ストロークを有しているのが好ましい。
この場合、非可動状態では、足裏部材が前方ストロークエンドにあり、この非可動状態では、足裏部材のつま先側部が最前部に位置して足載せ面が前傾姿勢にあるので、被施療者は足を足載せ面に載せやすい。
そして、この足裏部材が前方ストロークエンドに位置している状態から、ストレッチ用エアセルが膨張を続けると、単独で、足裏部材を後方ストロークエンドまで揺動させることができる。つまり、1つのストレッチ用エアセルの膨張により、足裏部材を前方ストロークエンドから後方ストロークエンドまで揺動させることができる。
【発明の効果】
【0016】
本発明によれば、足裏部材のつま先側部を中立位置から前後の両方向に移動させることで、被施療者の足を後方と前方との両側に脛に対して屈伸させることが可能となり、しかも、足裏部材を揺動させる揺動部材のレイアウトの自由度が高まり、ストレッチユニットをコンパクトに構成することが可能となる。
【図面の簡単な説明】
【0017】
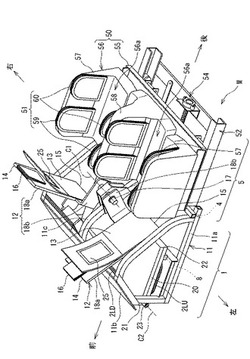
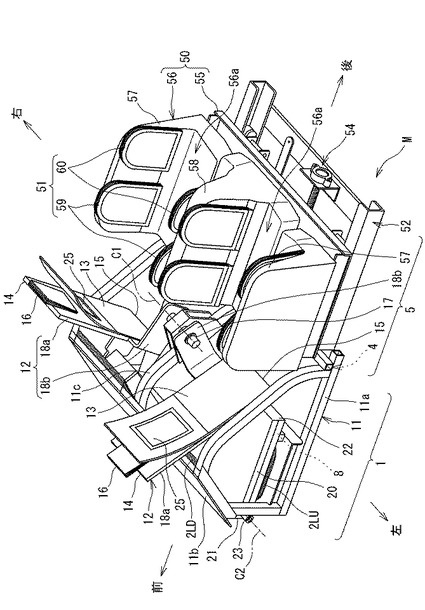
【図1】本発明の施療機の実施の一形態を示す斜視図である。
【図2】施療機による施療動作を説明する説明図である。
【図3】施療機による施療動作を説明する説明図である。
【図4】施療機の概略構成を示すブロック図である。
【図5】固定部材の説明図である。
【図6】施療機の下面図である。
【図7】拘束ユニットの本体部の斜視図であって、可動部を省略した図である。
【図8】拘束ユニットの本体部の斜視図であって、ベース部を省略した図である。
【図9】施療機によって実行される施療方法を説明するタイムチャートである。
【図10】他の施療方法を説明するタイムチャートである。
【図11】従来の施療機の説明図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態を図面に基づいて説明する。
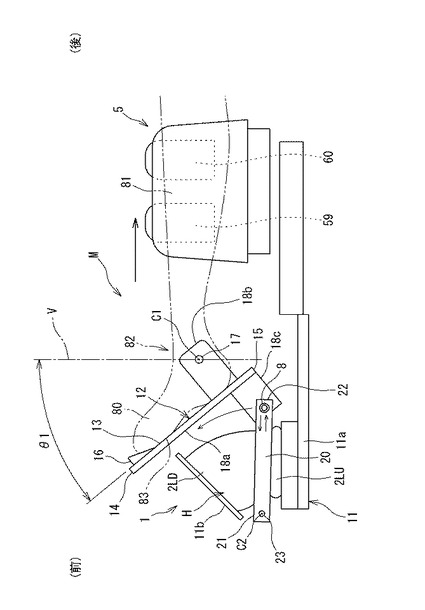
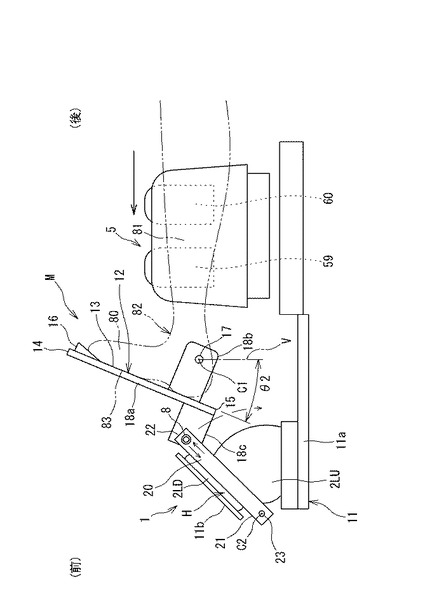
図1は、本発明の施療機の実施の一形態を示す斜視図である。図2と図3は、この施療機による施療動作を説明する説明図であり、施療機M及び被施療者の足80及び脛(脹脛)81を側方から見た図である。足80及び脛81を二点鎖線で示している。図4は、施療機Mの概略構成を示すブロック図である。
【0019】
〔1.施療機の全体構成〕
図2と図3とにおいて、本発明の施療機Mは、被施療者の足首の関節82から先の足80を、中立位置から後方と前方との両側に、関節82から後ろ側の脛81に対して強制的に屈伸させるストレッチユニット1を備えている。また、本実施形態の施療機Mは、被施療者の脛81を拘束する拘束ユニット5と、ストレッチユニット1及び拘束ユニット5の動作を制御する制御装置7(図4参照)とを更に備えている。制御装置7は、被施療者や施療機Mの管理者等が操作する操作器(コントローラ)7aからの信号を受け、当該信号に基づいて各種の制御を行う。
本実施形態では、ストレッチユニット1及び拘束ユニット5を、ベッド上等の水平面上に、当該ベッド上の被施療者の伸ばした脚の長さ方向に直列に並べて設置した場合として説明する。この被施療者の脚の長手方向に沿った方向が前後方向であり、足80側が前方、腰側が後方であり、脚を施療機Mに載せた状態で、被施療者の右手側が右、左手側が左であり、また、前後方向と左右方向とに直交する方向を上下方向としている。
【0020】
〔2.ストレッチユニット1について〕
ストレッチユニット1は、フレーム11と、被施療者の足裏83を載せる足載せ面13を有している足裏部材12と、この足裏部材12に動力を伝達する揺動部材20と、この揺動部材20を動作させるストレッチ用エアセル2LU,2LD,2RU,2RDを有する駆動装置3(図4参照)と、揺動部材20と足裏部材12との間に介在し両者間における動力の伝達を行う変換部材8とを備えている。
【0021】
〔2.1 フレーム11、足裏部材12、揺動部材20及び変換部材8について〕
図1において、前記フレーム11は、ベッド等の上に置かれる下フレーム11aと、下フレーム11aの前側から立設されている前フレーム11bと、下フレーム11aの後ろ側から立設され前フレーム11bの上部と繋がる後フレーム11cとを有している。
【0022】
前記足裏部材12は、左右それぞれに独立して設けられ、独立して動作する構成である。各足裏部材12は、足載せ面13をその一面に形成している板状部材18aと、この板状部材18aから被施療者の足首側へ向けて立設された(第1の)取り付け片18bとを有している。そして、取り付け片18bが、左右方向に延びる軸17によって、後フレーム11cに取り付けられており、各足裏部材12は、軸17の中心線C1(第1の中心線)回りに揺動自在である。取り付け片18bにより、図2と図3に示しているように、足裏部材12の揺動中心となる前記中心線C1は、左右の足首の関節82(くるぶし)を通る左右の仮想線と、同一又は近傍に位置する。また、足裏部材12は、第1の取り付け片18bと反対側に向けて立設された第2の取り付け片18cを有している。
【0023】
各足裏部材12は、そのつま先側部14が中立位置から前後の両方向に移動可能となる。つまり、つま先側部14は上下方向よりも前後方向に大きく変位する揺動(主に前後方向の成分を有する揺動)が行われる。なお、前記中立位置とは、被施療者の膝から足首の関節82までの脚の長手方向と、足首の関節82から先にある足80の長手方向(足裏83の長手方向)とが、直交する状態となる位置である。つまり、図2と図3では、一点鎖線で示している鉛直面(基準面)Vと足載せ面13とが平行となる位置が、中立位置である。中立位置(鉛直面V)から足載せ面13の前後方向の揺動角度は、前記ストレッチ用エアセルの動作ストローク等に依存するが、前方へ30°〜50°(図2ではθ1=40°)であり、後方に10°〜30°(図3ではθ2=20°)に設定される。
【0024】
前記揺動部材20は、足裏部材12と同様に、左右それぞれに独立して設けられ、独立して動作する構成である。本実施形態の揺動部材20は平たい直方体の箱形状を有している。各揺動部材20の基部21は、左右方向に延びる軸23によって、前フレーム11bに取り付けられており、各揺動部材20は、軸23の中心線C2(第2の中心線)回りに揺動自在である。そして、各揺動部材20の先部22は、図2と図3に示しているように、足裏部材12のつま先側部14の移動方向である前後方向と異なる方向、すなわち、斜め上下方向に移動可能となる。つまり、先部22は前後方向よりも上下方向に大きく変位する揺動(主に上下方向の成分を有する揺動)が行われる。また、第2の中心線C2は、フレーム11の最前位置であって、ベッドの上面等の載置面近傍に設けられている。
【0025】
前記変換部材8は、本実施形態(図2と図3)では、揺動部材20の先部22と、足裏部材12の第2の取り付け片18cとの間に介在したローラからなる。ローラは、軸(図示せず)によって取り付け片18cに回転自在に取り付けられており、箱形状である揺動部材20の壁に両側から挟まれた状態にあり、揺動部材20の内部を転がりながら移動することができる。
揺動部材20を第2の中心線C2回りに揺動させると、前記ローラは揺動部材20にガイドされながら移動することができ、これと同時に、ローラは、取り付け片18cを介して足裏部材12を第1の中心線C1回りに揺動させる。つまり、このローラ(変換部材8)によって、揺動部材20の揺動を、足裏部材12の揺動に変換することができる。
【0026】
〔2.2 駆動装置3(ストレッチ用エアセル)について〕
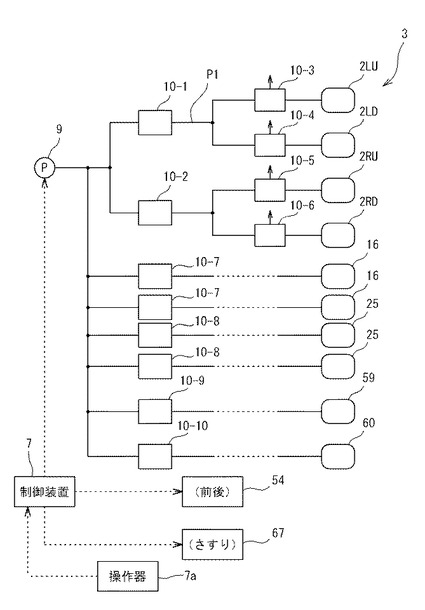
図4に示しているように、前記駆動装置3は、前記ストレッチ用エアセル2LU,2LD,2RU,2RDの他に、エアを吐出するポンプ9、及び、このポンプ9と前記ストレッチ用エアセルそれぞれとの間に設けられエアの流れを切り替えるバルブ10を有している。本実施形態では、バルブ10として、ストップ弁(保持弁)10−1,10−2と、3方向弁10−3,10−4,10−5,10−6,10−7,10−8,10−9,10−10とを有している。前記ストップ弁は、ポンプ9から各エアセルにエアが流れる状態と、エアセル側の流路を封止する状態とに切り替え可能である。前記3方向弁は、エアセルにエアを供給する状態と、エアセルのエアを大気に開放する状態とに切り替え可能である。これらバルブ10の切り替え動作は、前記制御装置7の制御信号に基づく。
【0027】
足裏部材12及び揺動部材20と共に、ストレッチ用エアセルに関しても、左右で同じ構成であり、図2と図3は左側を示している。代表して左側について説明すると、足裏部材12を前記中立位置から正逆両方向に揺動駆動させるために、ストレッチ用エアセル2LU,2LDは、揺動部材20を挟んだ両側に配置されている。
ストレッチ用エアセル2LU,2LDそれぞれは、蛇腹構造を有し、フレーム11(下フレーム11a,前フレーム11b)に取り付けられ展開不能である基部と、この基部側を中心としてほぼ扇形に展開可能である展開部とを有した構成であり、収縮時は略扁平形状であるが、エアが供給されるとほぼ扇形に膨張する。なお、図2と図3では、説明を容易とするためにエアセルを蛇腹構造として記載していない。
【0028】
ストレッチ用エアセル2LUは、下フレーム11aの一部と揺動部材20との間に介在しており、エアが給気されると膨張し、揺動部材20を持ち上げて中心線C2回りに上に揺動させる。この際、ストレッチ用エアセル2LDと繋がる3方向弁10−4は大気開放状態となり、当該エアセル2LDでは排気状態となる。
ストレッチ用エアセル2LDは、前フレーム11bの一部と揺動部材20との間に介在し、エアが給気されると膨張し、揺動部材20を押し下げて中心線C2回りに下に揺動させる。この際、ストレッチ用エアセル2LUと繋がる3方向弁10−3は大気開放状態となり、当該エアセル2LUでは排気状態となる。
このように、ストレッチ用エアセル2LU,2LDは、エアの給気又は排気によって膨張又は収縮することにより、揺動部材20を第2の中心線C2回りに両方向について揺動させることができる。
【0029】
以上より、ストレッチ用エアセル2LU,2LDが交互に膨張することにより、揺動部材20は第2の中心線C2回りに両方向について揺動し、変換部材8を介して、足裏部材12を第1の中心線C1回りに正逆両方向について揺動させることが可能となる。
つまり、図2の収縮状態にあるストレッチ用エアセル2LUを膨張させることで(図3)、揺動部材20を介して、足裏部材12を後方に揺動させることができ、つま先側部14は後方に移動し、かつ、踵側部15は反対である前方に移動し、被施療者の足80を、脛81に対して後方に屈曲させる。
これに対して、図3の収縮状態にあったストレッチ用エアセル2LDを膨張させることで(図2)、揺動部材20を介して、足裏部材12を前方に揺動させることができ、つま先側部14は前方に移動し、かつ、踵側部15は、反対である後方に移動し、被施療者の足80を、脛81に対して前方に伸張させる(図2の状態)。
このように、足裏部材12のつま先側部14は、中立位置から、前後の両方向に移動し、かつ、踵側部15は、つま先側部14と反対方向に移動し、被施療者の足80を、脛81に対して後方と前方との両側に屈伸させることが可能となる。
【0030】
〔2.3 ストレッチユニット1におけるその他の構成〕
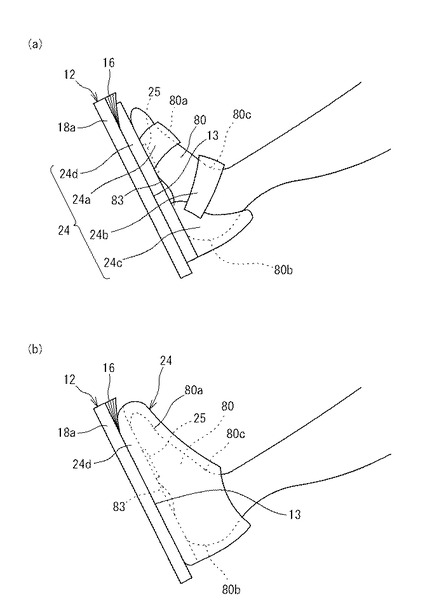
前記のとおり、被施療者の足80を後方と前方との両側に屈伸させることが可能であるが、この際、当該足80を足裏部材12に追従させるために、足80を足裏部材12に固定するのが好ましい。そこで、図5(a)に示しているように、足裏部材12は、被施療者の足80の少なくとも甲80aを上から押さえて、当該足80を足載せ面13に固定する固定部材24を有している。なお、図1、図2、図3では、説明を容易とするために固定部材24の記載を省略している。
【0031】
図5(a)の固定部材24は、足裏部材12に取り付けられており、足裏側にある板状の底部24dと、この底部24dと共に甲80aを囲む第1バンド24aと、踵80bを左右及び後方から囲むサポート部24cと、このサポート部24cと共に踵80b及び足首の裾部80cを囲む第2バンド24bとを有している。
また、図5(b)は固定部材24の変形例であり、この固定部材24は足80を入れる靴形状となっており、足裏部材12に取り付けられている。この靴形状を有する固定部材24も、甲80aを上から押さえることができ、また、足80全体を保持することができる。
【0032】
また、図5(a)と(b)に示しているように、足裏部材12の足載せ面13の中央には、エアの給気又は排気によって膨張又は収縮する押し付け用エアセル25が設けられている。このエアセル25が足裏83の中央部を押し上げ、前記固定部材24が甲80aを上から押さえていることにより、足80を足裏部材12と一体化させることができ、足裏部材12の揺動に足80を追従させやすくなる。なお、図5(b)の場合、エアセル25は、靴の中に設けられている。
また、前記固定部材24は、足載せ面13に対して着脱可能として足裏部材12に取り付けられていてもよい。これは、被施療者の足80のサイズは、人それぞれ異なることによる。特に図5(b)の靴型の場合に着脱可能な構成は好適である。
【0033】
また、ストレッチユニット1は、足載せ面13のつま先側に設けられたつま先用エアセル16を有している。このエアセル16は、エアの給気又は排気によって膨張又は収縮し、被施療者の足先(つま先)を当該足載せ面13から離す方向に押圧することができる。
図5(a)の場合、固定部材24の底部24dは、可撓性を有する部材(例えばゴム)からなり、この底部24dと足裏部材12(板状部材18a)との間に、エアセル16が設けられている。
図5(b)の場合、靴型の固定部材24の底部24dは、可撓性を有する部材(例えばゴム)からなり、この底部24dと足裏部材12(板状部材18a)との間に、エアセル16が設けられている。
【0034】
つま先用エアセル16、及び、前記押し付け用エアセル25は、図4に示しているように、弁10−7,10−8を通じて、ポンプ9からエアの供給を受けることができる。弁10−7,10−8それぞれの切り替え動作は、前記制御装置7の制御信号に基づく。つま先用エアセル16、及び、押し付け用エアセル25は、左右それぞれに設置されており、左右のつま先用エアセル16は、膨張と収縮に関して独立して制御され、左右の押し付け用エアセル25も、膨張と収縮に関して独立して制御される。
つま先用エアセル16を有するストレッチユニット1によれば、図3に示しているように、足裏部材12のつま先側部14を後方へ移動させると、被施療者の足80を屈する運動が行われ、アキレス腱を伸ばすことができるが、さらに、この運動を行っている状態で、つま先用エアセル16を膨張させると、より足(足裏)を伸ばす運動を被施療者に与えることが可能となる。
【0035】
〔2.4 本実施形態のストレッチユニット1について〕
また本実施形態の施療機Mでは、ストレッチユニット1が、図外のベッドの上面(前後方向及び左右方向に広がる平面)に設置された状態で、このベッドの上面と、つま先側部14が前方に位置した前傾姿勢(図2)にある足裏部材12との間に形成される空間Hに、ストレッチ用エアセル2LU,2LDが膨張可能で、かつ、揺動部材20が揺動可能として配置されている。この空間Hは、フレーム11内において、前傾姿勢にある足裏部材12の足載せ面13とは反対側に形成される空間であり、足裏部材12が前傾姿勢にある状態(後述する前方ストロークエンド)で、側面視においてほぼ三角形に形成される空間である。
【0036】
そして、揺動部材20の先部22の軌道が、前傾姿勢にある足裏部材12の踵側部15からつま先側部14へ向かう斜め前の方向となるように、揺動部材20はフレーム11に取り付けられている。
このように、前記空間Hに、つまり、足裏部材12の前方下部のデッドスペース(空間H)に、揺動部材20及びストレッチ用エアセル2LU,2LDを効率良く配置することができ、コンパクトにストレッチユニット1を構成することができる。
【0037】
さらに、この構成によれば、足裏部材12のつま先側部14を前後に動かすための揺動部材20の、先部22の移動方向は、足裏部材12のつま先側部14の移動方向である前後方向とは一致しないが、変換部材(ローラ)8が設けられていることにより、ストレッチ用エアセル2LU,2LDにより、揺動部材20を介して、足裏部材12を前後に揺動させることができる。つまり、ストレッチ用エアセル2LU,2LDによる揺動部材20の先部22の動作方向を、足裏部材12のつま先側部14の移動方向である前後方向と同じ方向にする必要がない。
【0038】
また、本実施形態では、施療機Mの使用開始直前の初期状態では、揺動部材20はストレッチ用エアセル2LU,2LDから駆動力を受けていない状態(非可動状態)にある。この初期状態(非可動状態)では、足裏部材12は、つま先側部14が最前端に位置する前方ストロークエンドにある(図2の状態)。
この初期状態(非可動状態)では、足裏部材12のつま先側部14が最前部に位置して足載せ面13が前傾姿勢にあるので、図外のベッド上に設置した施療機Mのストレッチユニット1に、施療者が足80を載せようとする場合に、当該被施療者は足80を足載せ面13に載せやすい。
【0039】
そして、この図2の状態から、揺動部材20が、ストレッチ用エアセル2LUから駆動力を受けることによって、足裏部材12を揺動させ、当該足裏部材12は、つま先側部14が最後端に位置する後方ストロークエンドに達する(図3の状態)。
つまり、足裏部材12が前方ストロークエンドに位置している状態(図2)から、ストレッチ用エアセル2LUが膨張を続けると、単独で、足裏部材12を後方ストロークエンド(図3)まで揺動させることができる。つまり、1つのストレッチ用エアセル2LUの膨張により、足裏部材12を前方ストロークエンドから後方ストロークエンドまで揺動させることができる。
このために、前記ストレッチ用エアセル2LUの膨張ストロークは、揺動部材20を介して、足裏部材12を前方ストロークエンドから後方ストロークエンドまで単独により揺動させることができる長さに相当するストロークに設定されている。
【0040】
〔3.拘束ユニット5について〕
図1において、前記拘束ユニット5は、前後方向に移動してストレッチユニット1に対して接離する本体部50と、ベッド等の上に置かれるフレーム52とを有している。本体部50は、フレーム52の左右の側壁53,53にガイドされ、前後に移動可能となっている。図6は、施療機Mの下面図である。拘束ユニット5は、本体部50を前後方向に駆動する駆動装置(前後駆動装置)54を有している。
【0041】
駆動装置54は、フレーム52に固定されたモータ61、前後方向に長いネジ軸63、モータ61の回転力をネジ軸63へ伝える減速器62を有し、モータ61の正逆回転によりネジ軸63が正逆回転する。モータ61の回転方向の変更は、前記制御装置7からの制御信号に基づく。
本体部50の裏面には、前記ネジ軸63に螺合するナット部材64が取り付けられている。モータ61が一方向に回転すると、ナット部材64は前進し、これにより、本体部50はストレッチユニット1に接近する。モータ61が他方向に回転すると、ナット部材64は後退し、これにより、本体部50はストレッチユニット1から離れる。制御装置7によって、モータ61の回転方向を周期的に変更することで、本体部50は、ストレッチユニット1に対して接近と離反とを繰り返す。
【0042】
図1において、前記本体部50は、ベース部55と、このベース部55に対して動作する可動部56とを有している。図7に示しているように、ベース部55は、底板55aと左右の側板55bとを有し、底板55aの裏面に前記ナット部材64(図6参照)が取り付けられている。
図1において、可動部56は、左右の側壁57と中央壁58とを有し、この可動部56には、左右の凹溝56aが形成されている。この凹溝56aに、被施療者は脛81を入れることができる。
【0043】
そして、拘束ユニット5は、被施療者の脛81を本体部50(可動部56)に拘束する拘束部51を有している。本実施形態の拘束部51は、エアの供給又は収縮により膨張又は収縮する拘束用エアセル59,60からなる。エアセル59,60は、左右の凹溝56a,56aそれぞれに設けられており、各凹溝56aの前側に、対のエアセル59が対向して配置されており、各凹溝56aの後ろ側に、対のエアセル60が対向して配置されている。本実施形態では、エアセル59,60はそれぞれ、前記側壁57及び中央壁58に取り付けられている。
【0044】
これらエアセル59,60は、図4に示しているように、弁10−9,10−10を通じて、ポンプ9からエアの供給を受けることができる。弁10−9,10−10それぞれの切り替え動作は、前記制御装置7の制御信号に基づく。
この拘束部51によれば、前側の向かい合うエアセル59及び後ろ側の向かい合うエアセル60の一方又は双方が膨張すると、被施療者の脛81を左右両側から挟むことができ、当該脛81を本体部50に固定することができる。
【0045】
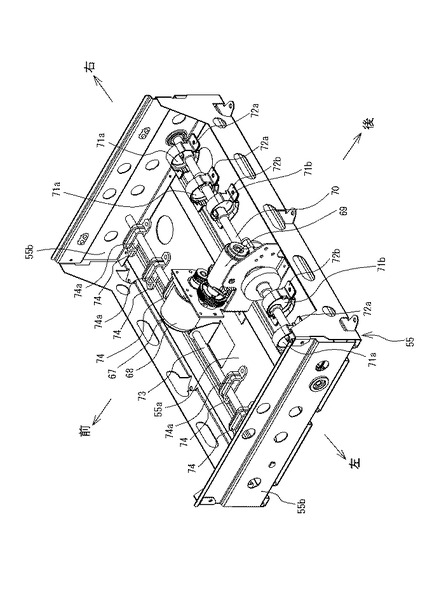
また、図8において、本実施形態の前記可動部56は分割構造(三分割構造)であり、前記側壁57を有する左右の側部ブロック65と、前記中央壁58を有する中央ブロック66とを有している。これらブロック65,66は、駆動装置(さすり駆動装置)67によって、ベース部55に対して前後方向の動作成分を有して前後往復動作することができる。
【0046】
図7において、ベース部55の左右の側壁55bの前側部には、左右方向に長いガイド軸73が取り付けられている。一方、図8において、左右の側部ブロック65及び中央ブロック66それぞれには、前後方向に長い長穴74aを有する長穴ホルダ74が取り付けられている。この長穴74aをガイド軸73が挿通しており、左右の側部ブロック65及び中央ブロック66それぞれは、ガイド軸73及び長穴ホルダ74によってガイドされながら、前後方向に移動自在である。
【0047】
そして、図7と図8とにおいて、前記駆動装置67は、ベース部55に設置された、モータ68、左右の側壁55bに支持された左右方向に長い回転軸70、モータ68の回転力を回転軸70へ伝える減速器69を有し、モータ68の正逆回転により回転軸70が正逆回転する。モータ61の回転方向及び回転速度の変更は、前記制御装置7からの制御信号に基づく。
【0048】
回転軸70の途中部には、偏心カム71a,71bが回転軸70と一体回転可能として取り付けられている。左右両外側寄りの四つの偏心カム71aは、同位相で回転するが、内側の二つの偏心カム71bは共に、外側の偏心カム71aと異なる位相(180°の位相差)で回転する。
図8において、外側の偏心カム71aの外周側には、相対回転可能な環状のカムホルダ72aが取り付けられており、このカムホルダ72aは、前記側部ブロック65に固定されている。また、中央の偏心カム71bの外周側には、相対回転可能な環状のカムホルダ72bが取り付けられており、このカムホルダ72bは、前記中央ブロック66に固定されている。
【0049】
以上の構成によれば、モータ68が回転すると、偏心カム71a,71bは、180°の位相差で回転する。これにより、左右の側部ブロック65の前側部は、前記ガイド軸73によって前後方向にガイドされながら、当該左右の側部ブロック65の後側部は、同位相で偏心回転する。そして、中央ブロック66の前側部は、前記ガイド軸73によって前後方向にガイドされながら、中央ブロック66の後側部は、前記側部ブロック65と異なる位相で、偏心回転する。
これにより、図1を参考に説明すると、モータ68が回転すると、左右の側部ブロック65及び中央ブロック66は、被施療者の脛(下腿部)の両側部に対して、左右で異なる位相により、前後方向の成分が主でかつ上下方向の成分を副として有した往復動作(偏心円運動)を行い、拘束用エアセル59,60を膨張させた状態で、当該脛に対してさすり動作を行うことが可能である。
【0050】
つまり、拘束ユニット5の本体部50(左右の側部ブロック65及び中央ブロック66)に設けられている前記拘束用エアセル59,60は、被施療者の脛に接触すると共に前後方向に動作するマッサージ具として機能することもでき、拘束ユニット5は、さすりユニットと呼ぶこともできる。
【0051】
図1と図6において、ストレッチユニット1のフレーム11と、拘束ユニット5のフレーム52とは、一体であってもよいが、別体としてこれらフレーム11とフレーム52とを、連結部材4によって、連結及び分解可能な構成とするのが好ましい。連結部材4は、両フレーム11,52同士を固定するボルトナット等を有する構成とすればよい。この連結部材4により、連結させて一体とした状態のストレッチユニット1と拘束ユニット5とを、分離することができ、例えば、被施療者に合わせて拘束ユニット5を用いずに、ストレッチユニット1のみをベッド等の上に設置してもよい。
【0052】
〔4.施療機Mによる施療動作について〕
前記制御装置7の記憶部にはコンピュータプログラムが記憶されており、このプログラムに基づいて、制御装置7が、ストレッチユニット1の各部を制御することにより、当該ストレッチユニット1単独でも、前記のとおり、被施療者の足80を、中立位置から後方と前方との両側に屈伸させる施療(ストレッチ運動)を与えることが可能である。
また、制御装置7が、拘束ユニット5の各部を制御することにより、ストレッチユニット1の動作に合わせて拘束ユニット5を動作させることで、より効果的な施療を行うことが可能となる。
【0053】
〔4.1 施療動作の具体例(その1)〕
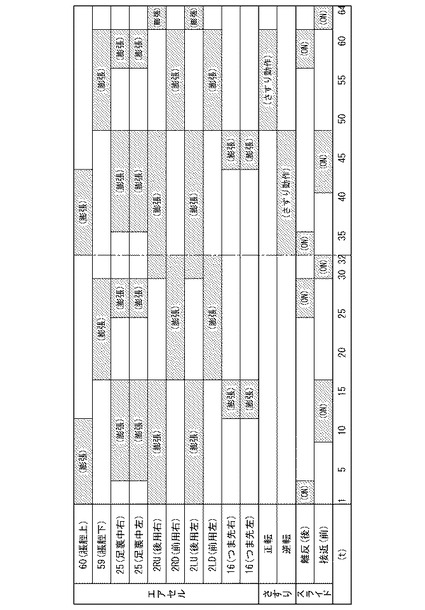
図9は、前記実施形態(図1)の施療機Mによって実行される施療方法を説明するタイムチャートである。図9の左欄の「エアセル」の項目は、各エアセルの膨張(給気)又は収縮(排気)の時間帯を示しており、「さすり」は前記さすり動作を実行している時間帯を示しており、「スライド」はストレッチユニット1に対する拘束ユニット5の前後移動(接離移動又は接近移動)の時間帯を示している。
施療機Mの初期状態では、拘束ユニット5はストレッチユニット1に最も接近した状態にあり、また、左右の足裏部材12は共に前方ストロークエンドに位置している(図2の状態、ただし、エアセル2LDには給気されていない)。
【0054】
(時間t=1〜16について)
後ろ側の拘束用エアセル60(図1参照)に給気を行い膨張させ被施療者の脛81を拘束した状態で、ストレッチ用エアセル2RU,2LUに給気を行い膨張させる。すると、図3に示しているように、左右の足裏部材12が、前方ストロークエンドから後方ストロークエンドへと達する(t=16)。その途中で、左右の足裏部材12の押し付け用エアセル25を膨張させ固定部材24と協働して、被施療者の左右の足80を足裏部材12に固定している。
これにより、ストレッチユニット1において、足裏部材12のつま先側部14を後方へ移動させることができ、被施療者の足80(足首の関節82)を後方に屈する運動が行われ、アキレス腱を伸ばすことができる(t=1〜16)。この足裏部材12の動作開始に遅れてその途中で(t=9)、脛を拘束した(かつ一旦離反させておいた)拘束ユニット5の本体部50を、ストレッチユニット1に接近する方向に移動させる制御も行う(t=9〜16)。これにより、被施療者の踵が足裏部材12(足載せ面13)から離れようとするのを防ぐことができ、足を屈する運動をより効果的に行うことができる。
そして、足裏部材12が後方ストロークエンドへ到達する前に(t=12)、左右のつま先用エアセル16に給気を行い膨張させ、足80(足裏83)を伸ばす運動も行う。この際(t=12)、拘束用エアセル60を排気状態に切り替え、足80への過度の負担を和らげている。
【0055】
(時間t=17〜29について)
拘束用エアセル59,60の状態を切り替え、前側の拘束用エアセル59に給気を行い膨張させ被施療者の脛81を拘束した状態で、ストレッチ用エアセル2RD,2LDに給気を行い膨張させる。この際、膨張していたエアセル2RU,2LUを排気状態とする。これにより、図2に示しているように、左右の足裏部材12が、後方ストロークエンドから前方ストロークエンドへと達する(t=29)。この際、膨張していた左右の足裏部材12の押し付け用エアセル25を収縮状態としている。
これにより、ストレッチユニット1において、足裏部材12のつま先側部14を前方へ移動させることができ、被施療者の足80(足首の関節82)を前方へ伸ばす運動が行われる(t=17〜29)。この足裏部材12の動作開始に遅れてその途中で(t=25)、脛を拘束した拘束ユニット5の本体部50をストレッチユニット1から離れる方向に移動させる制御も行う(t=25〜29)。これにより、被施療者の足80から脛81までの範囲を広く伸ばすことができ、より効果的な施療(運動)が行われる。つまり、固定部材24(図5参照)によって足80がストレッチユニット1(足裏部材12)に固定された状態で、拘束ユニット2によって脛を後方へ引っ張る運動が行われる。
【0056】
そして、再び、ストレッチ用エアセル2RU,2LUに給気を行い膨張させ、足裏部材12を中立位置とし、拘束ユニット5をストレッチユニット1に接近させ前後中間位置とする(時間t=30〜32)。
【0057】
(時間t=33〜64について)
この時間帯では、前記の時間t=1〜32までと同じ動作が施療機Mにおいて繰り返し実行されるが、さらに、さすり動作も行われる。前半(時間t=33〜48)と後半(時間t=49〜61)とでは、さすり運動に関して、側部ブロック65及び中央ブロック66の、前記偏心円運動の回転方向を切り替えている。
【0058】
〔4.2 施療動作の具体例(その2)〕
図10は、前記実施形態(図1)の施療機Mによって実行される他の施療方法を説明するタイムチャートである。図10の施療方法は、図9の時間t=1〜16までの各「エアセル」(及び「さすり」)について、同じであるが、拘束ユニット5の「スライド」の方向を反対としている。すなわち、制御装置7は、ストレッチユニット1において、ストレッチ用エアセル2LU,2RUを膨張させて、足裏部材12のつま先側部14を後方へ移動させている状態で、脛81を拘束した拘束ユニット5の本体部50をストレッチユニット1から離れる方向に移動させる制御を行う。
特に、足裏部材12のつま先側部14の後方への移動と、拘束ユニット5の本体部50の後方への移動とを、少なくとも一部の時間帯で同時に行えばよいが、図10に示しているように、足裏部材12のつま先側部14の後方への移動(離反)を先に開始して(t=1)、その移動の途中で(t=9)、本体部50の後方への移動を行うのが好ましい。
これにより、被施療者の足80及び脚において、心臓に遠い部位から近い部位へ向かって施療箇所が移動するいわゆる求心法による施療が行われ、血液循環の促進が図れる。
【0059】
また、時間t=17〜29の時間帯では、制御装置7は、ストレッチユニット1において、ストレッチ用エアセル2LD,2RDを膨張させて、足裏部材12のつま先側部14を前方へ移動させている状態で、脛81を拘束した拘束ユニット5の本体部50をストレッチユニット1に接近する方向(前方)に移動させる制御を行う。
特に、図10に示しているように、本体部50の前方への移動(接近)を先に開始して(t=20)、その移動の途中で(t=23)、足裏部材12のつま先側部14の前方への移動を行うのが好ましい。
これにより、被施療者の足80及び脚において、心臓に近い部位から遠い部位へ向かって施療箇所が移動するいわゆる遠心法による施療が行われ、血液循環の促進が図れる。
【0060】
〔4.3 施療動作の具体例(その3)〕
図9の各「エアセル」及び「さすり」については、同じであるが、「スライド」を実行しなくてもよい。つまり、時間t=1〜32では、拘束ユニット5の本体部50の前後移動は実行されない。なお、時間t=33〜64では、さすり動作については実行される。
【0061】
〔4.4 施療動作の具体例(その4)〕
図9の施療動作は、ストレッチユニット1において、左右の足裏部材12を同じ位相で同期して動作させる場合であったが、左右の足裏部材12は、既に説明したように、左右それぞれ独立して設けられており、独立して揺動することができる構成であるため、左右の足裏部材12を異なる位相で動作させることができる。
そこで、制御装置7は、ストレッチ用エアセル2LU,2LD、ポンプ9等を有する駆動装置3を制御することにより、左足用の足裏部材12と右足用の足裏部材12とを、同位相で揺動させる第1動作モードと、異なる位相で揺動させる第2動作モードとに切り替え可能である。第2動作モードを選択することにより、図1のように、一方の足裏部材12を前、他方の足裏部材12を後ろとすることができ、また、これを交互に行うことが可能である。
【0062】
〔4.5 施療動作の具体例(その5)〕
図4において、制御装置7からの制御信号により、各バルブ10の開閉状態を切り替えることができる。代表して、左側の足80用のストレッチ用エアセル2LU,2LDについて、図2と図3を参照しつつ説明する。被施療者が足80を足裏部材12に載せ、固定部材24によって固定した状態で、ストップ弁10−1及び3方向弁10−3,10−4を通じて、エアセル2LU,2LDの双方に給気を行い膨張させる。すると、足80(足裏部材12)を、ほぼ中立位置とすることができる。
【0063】
この状態で、ストップ弁10−1を切り替え、エアセル2LU,2LD側の流路P1を封止した状態とする。3方向弁10−3,10−4は、そのままであり、前記流路P1とエアセル2LU,2LDとの間でエアの流れは自由であるが、エアセル2LU,2LD内のエアが大気に開放されない。これにより、流路P1のエアは、外部へ漏れることができず、両側のエアセル2LU,2LDを膨張状態で保持することができ、かつ、両側のエアセル2LU,2LD間でエアの流れを許容している状態となる。
【0064】
この場合、被施療者が、自らの足80の力で足裏部材12を前後一方に揺動させ、揺動部材20を介して、一方のストレッチ用エアセル(例えば2LU)を圧縮させると、このストレッチ用エアセル(2LU)から、他方のストレッチ用エアセル(2LD)へとエアが流れ、被施療者は、自力で足80を屈伸させることができる。なお、この自力による運動は、反対でも可能であり、前後方向に交互に行うことができる。そして、ストレッチ用エアセル2LU,2LDは膨張状態で保持されているので、自力によるこの運動は、負荷が与えられた状態で行われる。このように、施療機Mを用いているが、被施療者の自力による運動を「自動運動」と呼ぶ。
【0065】
前記「自動運動」に対し、前記施療動作の具体例(その1)〜(その4)のように、施療機Mが駆動して被施療者に強制的な運動を与える場合を「他動運動」と呼ぶ。そして、本実施形態では、操作器7aに、自動運動と他動運動との切り替え用スイッチが設けられており、操作器7aが操作されることにより、操作器7aからの切り替え信号に基づいて、制御装置7は、自動運動と他動運動とを切り替えて、施療機Mを機能させることができる。
また、自動運動と他動運動とを択一的に選択して切り替えるのみならず、操作器7aにおける操作によって、自動運動と他動運動との双方を施療機Mに行わせることもできる。つまり、制御装置7には、自動運動のみを実行させるコース(プログラム)と、他動運動のみを実行させるコース(プログラム)と、自動運動と他動運動との双方を実行させるコース(プログラム)とが設定されている。双方を実行させる場合、例えば、制御装置7は、自動運動を(2〜3分)実行し、その後、他動運動を(4〜6分)実行し、再び、自動運動を(2〜3分)実行する。なお、自動運転及び他動運転の実行時間は任意に設定することができる。
自動運動と他動運動との切り替えは、操作器7aを操作することにより行ってもよいが、制御装置7が時間管理を行い自動的に自動運動と他動運動との切り替えを行ってもよい。自動運転終了から所定時間経過後に他動運転に自動的に切り替わることにより、又は、被施療者が自ら切り替えることにより、使用者を休憩させることができる。
【0066】
また、前記各施療動作(その1)〜(その5)の少なくとも一つを実行するためのプログラムが制御装置7に記憶されており、操作器7aを操作することにより施療動作を択一的に選択して実行することができる。
【0067】
〔5.その他の施療機について〕
前記拘束ユニット5は、被施療者の足首の関節から先の足を中立位置から後方と前方との両側に脛に対して屈伸させるストレッチユニットを備えた施療機に適用可能であり、このストレッチユニット1の形態は、前記実施形態以外の場合であってもよい。
つまり、その施療機は、拘束ユニットと、被施療者の足首の関節から先の足を中立位置から後方と前方との両側に脛に対して屈伸させるストレッチユニットと、を備え、前記拘束ユニットは、前後方向に移動して前記ストレッチユニットに対して接離する本体部と、被施療者の脛を前記本体部に拘束する拘束部とを有する拘束ユニットと、前記ストレッチユニット及び前記拘束ユニットの動作を制御する制御装置と、を備えたものである。
そして、この場合に、拘束ユニット及びストレッチユニットそれぞれは、既に説明した前記各構成(各機能)の少なくとも一つを備え、前記説明した動作を行うものである。
【0068】
また、本発明の施療機は、図示する形態に限らず本発明の範囲内において他の形態のものであってもよい。前記実施形態では、ベッド上等の水平面に施療機Mを載置して用いる場合を説明したが、椅子の前部に取り付けてもよく、この場合、椅子に着座した使用者の足側にストレッチユニットが配置され、脛側に拘束ユニットが配置される。そして、ストレッチユニット及び拘束ユニットにより、足載置部が構成され、この足載置部は、座部側を支点として上下に回動自在として椅子のフレームに取り付けられており、アクチュエータによって、上下回動駆動する。そして、足載置部を上げた状態(ストレッチユニット及び拘束ユニットがほぼ水平状に並んだ状態)、又は、足載置部を下げた状態(ストレッチユニットの上に拘束ユニットが並んだ状態)で、施療が可能となる。
そして、この椅子は、背凭れ部、及び、この背凭れ部にマッサージ具が設けられている椅子型マッサージ機であってもよい。
【符号の説明】
【0069】
1:ストレッチユニット、 2:ストレッチ用エアセル、 2LU:ストレッチ用エアセル、 2LD:ストレッチ用エアセル、 2RU:ストレッチ用エアセル、 2RD:ストレッチ用エアセル、 3:駆動装置、 5:拘束ユニット、 7:制御装置、 8:変換部材、 9:ポンプ、 10:バルブ、 11:フレーム、 12:足裏部材、 13:足載せ面、 14:つま先側部、 15:踵側部、 16:つま先用エアセル、 20:揺動部材、 21:基部、 22:先部、 50:本体部、 51:拘束部、 80:足、 81:脛、 82:足首の関節、 83:足裏、 C1:第1の中心線、 C2:第2の中心線、 H:空間、 M:施療機
【技術分野】
【0001】
本発明は、被施療者の足首の関節から先の足を、後方と前方との両側に屈伸させることができる施療機に関する。
【背景技術】
【0002】
例えば飛行機内で長時間にわたって同じ姿勢で座っていると、静脈血栓塞栓症を起こす危険性が高くなることが知られているが、その予防策として、足を動かすことが有効である。そこで、被施療者の足を強制的に動かすことのできる装置の開発が望まれており、例えば、特許文献1に記載されたものがある。しかし、この装置では、足首の関節から先の足を、脛に対して後方に屈する方向(アキレス腱が伸びる方向)に運動させることはできても、その反対である足を前方へ伸ばす方向に運動させることはできない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−89672号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
そこで、足を後方と前方との両側に屈伸させるためには、足裏を載せる足裏部材を設け、この足裏部材を前後に揺動させればよいと考えられる。そこで、図11(a)に示しているように、左右方向の中心線94回りに揺動する板状の足裏部材91をフレーム90に設け、この足裏部材91とフレーム90の前壁90aとの間の、つま先側と踵側とのそれぞれにアクチュエータとしてエアセル92,93を設け、図11(b)及び(c)に示しているように、これらを交互に膨張収縮させればよい。エアセル92,93は、エアの給気排気によって膨張収縮するものであり、また、アクチュエータとしてエアセル92,93を採用することで、膨張しても多少変形が可能であるため足への負担を和らげることができる。
【0005】
前記装置の場合、足を伸ばす方向(矢印F)への足裏部材91の可動域を確保するためには、図11(a)の中立状態にある足裏部材91のつま先側91aと、前壁90aとの間には、両者が緩衝しないように前後方向に広いスペース95が必要となり、このため、装置が大型化してしまう。
また、エアセル92,93は、それ自体の剛性が低いため、このような広いスペース95で長いストロークにわたって膨張させる構成には適しておらず、さらに、この足裏部材91を、足を屈する方向(矢印B)に揺動させるためには(図11(c)参照)、つま先側のエアセル92は、前記スペース95よりもさらに前後方向に長いストロークSを有する必要がある。したがって、図11に示した装置を実現させるのは困難である。
【0006】
そこで本発明は、足を後方と前方との両側に屈伸させることが可能であり、しかも、コンパクト化が可能となる施療機を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、被施療者の足首の関節から先の足を中立位置から後方と前方との両側に脛に対して屈伸させるストレッチユニットを備えた施療機であって、前記ストレッチユニットは、フレームと、被施療者の足裏を載せる足載せ面を有し左右方向の第1の中心線回りに揺動可能として前記フレームに取り付けられつま先側部が中立位置から前後の両方向に移動可能である足裏部材と、左右方向の第2の中心線回りに揺動可能として基部が前記フレームに取り付けられ先部が前記つま先側部の移動方向と異なる方向に移動可能である揺動部材と、エアの給気によって膨張することで前記揺動部材を前記第2の中心線回りに揺動させるストレッチ用エアセルを有する駆動装置と、前記揺動部材と前記足裏部材との間に介在し当該揺動部材の揺動を前記足裏部材の揺動に変換する変換部材とを備えたことを特徴とする。
【0008】
本発明によれば、ストレッチ用エアセルが膨張することにより揺動部材は第2の中心線回りに揺動し、変換部材を介して、足裏部材は第1の中心線回りに揺動する。この足裏部材を正逆両方向に揺動させることで、足裏部材のつま先側部は中立位置から前後の両方向に移動し、被施療者の足首の関節から先の足を、中立位置から後方と前方との両側に脛に対して屈伸させることが可能となる。
そして、足裏部材のつま先側部の移動方向である前後方向と異なる方向に、ストレッチ用エアセルによって揺動部材の先部を移動させても、前記変換部材を有していることにより、足裏部材のつま先側部を前後方向に移動させることができる。つまり、ストレッチ用エアセルによる揺動部材の動作方向を、足裏部材のつま先側部の移動方向である前後方向と同じ方向にする必要がない。このため、揺動部材のレイアウトの自由度が高まり、ストレッチユニットをコンパクトに構成することが可能となる。
【0009】
なお、本発明において、中立位置とは、膝から足首までの脚の長手方向と、足首から先にある足の長手方向(足裏の長手方向)とが、直交する状態となる位置である。また、後方及び前方は、被施療者の伸ばした脚の長手方向に沿った方向であり、後方は、脚全体を伸ばした被施療者の腰側の方向であり、前方とは、その反対の方向である。
さらに、本発明では、足首の関節からつま先までを「足」、当該関節から膝側を「脚」と区別している。
【0010】
また、前記施療機は、前後方向に移動して前記ストレッチユニットに対して接離する本体部と、被施療者の脛を前記本体部に拘束する拘束部とを有する拘束ユニットと、前記ストレッチユニット及び前記拘束ユニットの動作を制御する制御装置とを更に備え、前記制御装置は、前記ストレッチユニットにおいて前記足裏部材の前記つま先側部を前方へ移動させている状態で、脛を拘束した前記本体部を当該ストレッチユニットから離れる方向に移動させ、前記足裏部材の前記つま先側部を後方へ移動させている状態で、脛を拘束した前記本体部を当該ストレッチユニットに接近する方向に移動させる制御を行うのが好ましい。
【0011】
この場合、ストレッチユニットにおいて足裏部材のつま先側部を前方へ移動させると、被施療者の足(足首)を前方へ伸ばす運動が行われ、この状態で、脛を拘束した拘束ユニットの本体部をストレッチユニットから離れる方向に移動させると、足から脛までの範囲を広く伸ばすことができ、より効果的な施療(運動)が行われる。
一方、ストレッチユニットにおいて足裏部材のつま先側部を後方へ移動させると、被施療者の足を屈する運動が行われ、アキレス腱を伸ばすことができ、この状態で、脛を拘束した拘束ユニットの本体部をストレッチユニットに接近する方向に移動させることで、踵が足裏部材から離れようとするのを防ぐことができ、足を屈する運動をより効果的に行うことができる。
【0012】
また、前記ストレッチユニットにおいて、前後方向及び左右方向に広がる仮想平面上に前記ストレッチユニットが配置されているとした場合に、前記つま先側部が前方に位置した前傾姿勢にある前記足裏部材と、前記仮想平面との間に形成される空間に、前記ストレッチ用エアセルが膨張可能でかつ前記揺動部材が揺動可能として配置されており、前記揺動部材の前記先部の軌道が、前記前傾姿勢にある足裏部材の踵側部からつま先側部へ向かう方向となるように、当該揺動部材は前記フレームに取り付けられている構成とすることができる。
この場合、前記空間に揺動部材及びストレッチ用エアセルを配置することができ、コンパクトにストレッチユニットを構成することができる。
【0013】
また、前記ストレッチユニットは、前記足載せ面のつま先側に設けられエアの給気によって膨張し被施療者の足先を当該足載せ面から離す方向に押圧する、つま先用エアセルを備えているのが好ましい。
この場合、ストレッチユニットにおいて、足裏部材のつま先側部を後方へ移動させると、被施療者の足を屈する運動が行われ、アキレス腱を伸ばすことができるが、さらに、この運動を行っている状態で、つま先用エアセルを膨張させると、足(足裏)を伸ばす運動を被施療者に与えることが可能となる。
【0014】
また、例えば、足裏部材のつま先側部を後方へ揺動させるために、ストレッチ用エアセルを膨張させ、バネ部材の弾性力(復元力)によって当該つま先側部を前方へ揺動させる構成であってもよいが、前記足裏部材を前記中立位置から正逆両方向に揺動駆動させるために、前記ストレッチ用エアセルは、前記揺動部材を挟んだ両側に配置されており、前記駆動装置は、エアを吐出するポンプ、及び、当該ポンプと前記ストレッチ用エアセルとの間に設けられエアの流れを切り替えるバルブを有し、前記バルブは、前記両側のストレッチ用エアセルを膨張状態で保持するとともに、当該両側のストレッチ用エアセル間でエアの流れを許容している状態に、切り替え可能であるのが好ましい。
この場合、両側のストレッチ用エアセルを膨張状態で保持し、両側のストレッチ用エアセル間でエアの流れを許容している状態とすることで、被施療者が、自らの足の力で足裏部材を揺動させて、揺動部材を介して、一方のストレッチ用エアセルを圧縮させると、当該一方のストレッチ用エアセルから他方のストレッチ用エアセルへとエアが流れ、被施療者は、自力で足を屈伸させることができる。また、ストレッチ用エアセルは膨張状態で保持されているので、前記自力で屈伸させる運動は、負荷が与えられた状態で行われる。
【0015】
また、前記揺動部材が前記ストレッチ用エアセルから駆動力を受けていない非可動状態では、前記足裏部材は、前記つま先側部が最前端に位置する前方ストロークエンドにあり、前記揺動部材が前記ストレッチ用エアセルから駆動力を受けることによって、前記足裏部材を揺動させ、当該足裏部材は、前記つま先側部が最後端に位置する後方ストロークエンドに達し、前記ストレッチ用エアセルは、前記揺動部材を介して、前記足裏部材を前記前方ストロークエンドから前記後方ストロークエンドまで単独により揺動させることができる長さに相当する、膨張ストロークを有しているのが好ましい。
この場合、非可動状態では、足裏部材が前方ストロークエンドにあり、この非可動状態では、足裏部材のつま先側部が最前部に位置して足載せ面が前傾姿勢にあるので、被施療者は足を足載せ面に載せやすい。
そして、この足裏部材が前方ストロークエンドに位置している状態から、ストレッチ用エアセルが膨張を続けると、単独で、足裏部材を後方ストロークエンドまで揺動させることができる。つまり、1つのストレッチ用エアセルの膨張により、足裏部材を前方ストロークエンドから後方ストロークエンドまで揺動させることができる。
【発明の効果】
【0016】
本発明によれば、足裏部材のつま先側部を中立位置から前後の両方向に移動させることで、被施療者の足を後方と前方との両側に脛に対して屈伸させることが可能となり、しかも、足裏部材を揺動させる揺動部材のレイアウトの自由度が高まり、ストレッチユニットをコンパクトに構成することが可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の施療機の実施の一形態を示す斜視図である。
【図2】施療機による施療動作を説明する説明図である。
【図3】施療機による施療動作を説明する説明図である。
【図4】施療機の概略構成を示すブロック図である。
【図5】固定部材の説明図である。
【図6】施療機の下面図である。
【図7】拘束ユニットの本体部の斜視図であって、可動部を省略した図である。
【図8】拘束ユニットの本体部の斜視図であって、ベース部を省略した図である。
【図9】施療機によって実行される施療方法を説明するタイムチャートである。
【図10】他の施療方法を説明するタイムチャートである。
【図11】従来の施療機の説明図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は、本発明の施療機の実施の一形態を示す斜視図である。図2と図3は、この施療機による施療動作を説明する説明図であり、施療機M及び被施療者の足80及び脛(脹脛)81を側方から見た図である。足80及び脛81を二点鎖線で示している。図4は、施療機Mの概略構成を示すブロック図である。
【0019】
〔1.施療機の全体構成〕
図2と図3とにおいて、本発明の施療機Mは、被施療者の足首の関節82から先の足80を、中立位置から後方と前方との両側に、関節82から後ろ側の脛81に対して強制的に屈伸させるストレッチユニット1を備えている。また、本実施形態の施療機Mは、被施療者の脛81を拘束する拘束ユニット5と、ストレッチユニット1及び拘束ユニット5の動作を制御する制御装置7(図4参照)とを更に備えている。制御装置7は、被施療者や施療機Mの管理者等が操作する操作器(コントローラ)7aからの信号を受け、当該信号に基づいて各種の制御を行う。
本実施形態では、ストレッチユニット1及び拘束ユニット5を、ベッド上等の水平面上に、当該ベッド上の被施療者の伸ばした脚の長さ方向に直列に並べて設置した場合として説明する。この被施療者の脚の長手方向に沿った方向が前後方向であり、足80側が前方、腰側が後方であり、脚を施療機Mに載せた状態で、被施療者の右手側が右、左手側が左であり、また、前後方向と左右方向とに直交する方向を上下方向としている。
【0020】
〔2.ストレッチユニット1について〕
ストレッチユニット1は、フレーム11と、被施療者の足裏83を載せる足載せ面13を有している足裏部材12と、この足裏部材12に動力を伝達する揺動部材20と、この揺動部材20を動作させるストレッチ用エアセル2LU,2LD,2RU,2RDを有する駆動装置3(図4参照)と、揺動部材20と足裏部材12との間に介在し両者間における動力の伝達を行う変換部材8とを備えている。
【0021】
〔2.1 フレーム11、足裏部材12、揺動部材20及び変換部材8について〕
図1において、前記フレーム11は、ベッド等の上に置かれる下フレーム11aと、下フレーム11aの前側から立設されている前フレーム11bと、下フレーム11aの後ろ側から立設され前フレーム11bの上部と繋がる後フレーム11cとを有している。
【0022】
前記足裏部材12は、左右それぞれに独立して設けられ、独立して動作する構成である。各足裏部材12は、足載せ面13をその一面に形成している板状部材18aと、この板状部材18aから被施療者の足首側へ向けて立設された(第1の)取り付け片18bとを有している。そして、取り付け片18bが、左右方向に延びる軸17によって、後フレーム11cに取り付けられており、各足裏部材12は、軸17の中心線C1(第1の中心線)回りに揺動自在である。取り付け片18bにより、図2と図3に示しているように、足裏部材12の揺動中心となる前記中心線C1は、左右の足首の関節82(くるぶし)を通る左右の仮想線と、同一又は近傍に位置する。また、足裏部材12は、第1の取り付け片18bと反対側に向けて立設された第2の取り付け片18cを有している。
【0023】
各足裏部材12は、そのつま先側部14が中立位置から前後の両方向に移動可能となる。つまり、つま先側部14は上下方向よりも前後方向に大きく変位する揺動(主に前後方向の成分を有する揺動)が行われる。なお、前記中立位置とは、被施療者の膝から足首の関節82までの脚の長手方向と、足首の関節82から先にある足80の長手方向(足裏83の長手方向)とが、直交する状態となる位置である。つまり、図2と図3では、一点鎖線で示している鉛直面(基準面)Vと足載せ面13とが平行となる位置が、中立位置である。中立位置(鉛直面V)から足載せ面13の前後方向の揺動角度は、前記ストレッチ用エアセルの動作ストローク等に依存するが、前方へ30°〜50°(図2ではθ1=40°)であり、後方に10°〜30°(図3ではθ2=20°)に設定される。
【0024】
前記揺動部材20は、足裏部材12と同様に、左右それぞれに独立して設けられ、独立して動作する構成である。本実施形態の揺動部材20は平たい直方体の箱形状を有している。各揺動部材20の基部21は、左右方向に延びる軸23によって、前フレーム11bに取り付けられており、各揺動部材20は、軸23の中心線C2(第2の中心線)回りに揺動自在である。そして、各揺動部材20の先部22は、図2と図3に示しているように、足裏部材12のつま先側部14の移動方向である前後方向と異なる方向、すなわち、斜め上下方向に移動可能となる。つまり、先部22は前後方向よりも上下方向に大きく変位する揺動(主に上下方向の成分を有する揺動)が行われる。また、第2の中心線C2は、フレーム11の最前位置であって、ベッドの上面等の載置面近傍に設けられている。
【0025】
前記変換部材8は、本実施形態(図2と図3)では、揺動部材20の先部22と、足裏部材12の第2の取り付け片18cとの間に介在したローラからなる。ローラは、軸(図示せず)によって取り付け片18cに回転自在に取り付けられており、箱形状である揺動部材20の壁に両側から挟まれた状態にあり、揺動部材20の内部を転がりながら移動することができる。
揺動部材20を第2の中心線C2回りに揺動させると、前記ローラは揺動部材20にガイドされながら移動することができ、これと同時に、ローラは、取り付け片18cを介して足裏部材12を第1の中心線C1回りに揺動させる。つまり、このローラ(変換部材8)によって、揺動部材20の揺動を、足裏部材12の揺動に変換することができる。
【0026】
〔2.2 駆動装置3(ストレッチ用エアセル)について〕
図4に示しているように、前記駆動装置3は、前記ストレッチ用エアセル2LU,2LD,2RU,2RDの他に、エアを吐出するポンプ9、及び、このポンプ9と前記ストレッチ用エアセルそれぞれとの間に設けられエアの流れを切り替えるバルブ10を有している。本実施形態では、バルブ10として、ストップ弁(保持弁)10−1,10−2と、3方向弁10−3,10−4,10−5,10−6,10−7,10−8,10−9,10−10とを有している。前記ストップ弁は、ポンプ9から各エアセルにエアが流れる状態と、エアセル側の流路を封止する状態とに切り替え可能である。前記3方向弁は、エアセルにエアを供給する状態と、エアセルのエアを大気に開放する状態とに切り替え可能である。これらバルブ10の切り替え動作は、前記制御装置7の制御信号に基づく。
【0027】
足裏部材12及び揺動部材20と共に、ストレッチ用エアセルに関しても、左右で同じ構成であり、図2と図3は左側を示している。代表して左側について説明すると、足裏部材12を前記中立位置から正逆両方向に揺動駆動させるために、ストレッチ用エアセル2LU,2LDは、揺動部材20を挟んだ両側に配置されている。
ストレッチ用エアセル2LU,2LDそれぞれは、蛇腹構造を有し、フレーム11(下フレーム11a,前フレーム11b)に取り付けられ展開不能である基部と、この基部側を中心としてほぼ扇形に展開可能である展開部とを有した構成であり、収縮時は略扁平形状であるが、エアが供給されるとほぼ扇形に膨張する。なお、図2と図3では、説明を容易とするためにエアセルを蛇腹構造として記載していない。
【0028】
ストレッチ用エアセル2LUは、下フレーム11aの一部と揺動部材20との間に介在しており、エアが給気されると膨張し、揺動部材20を持ち上げて中心線C2回りに上に揺動させる。この際、ストレッチ用エアセル2LDと繋がる3方向弁10−4は大気開放状態となり、当該エアセル2LDでは排気状態となる。
ストレッチ用エアセル2LDは、前フレーム11bの一部と揺動部材20との間に介在し、エアが給気されると膨張し、揺動部材20を押し下げて中心線C2回りに下に揺動させる。この際、ストレッチ用エアセル2LUと繋がる3方向弁10−3は大気開放状態となり、当該エアセル2LUでは排気状態となる。
このように、ストレッチ用エアセル2LU,2LDは、エアの給気又は排気によって膨張又は収縮することにより、揺動部材20を第2の中心線C2回りに両方向について揺動させることができる。
【0029】
以上より、ストレッチ用エアセル2LU,2LDが交互に膨張することにより、揺動部材20は第2の中心線C2回りに両方向について揺動し、変換部材8を介して、足裏部材12を第1の中心線C1回りに正逆両方向について揺動させることが可能となる。
つまり、図2の収縮状態にあるストレッチ用エアセル2LUを膨張させることで(図3)、揺動部材20を介して、足裏部材12を後方に揺動させることができ、つま先側部14は後方に移動し、かつ、踵側部15は反対である前方に移動し、被施療者の足80を、脛81に対して後方に屈曲させる。
これに対して、図3の収縮状態にあったストレッチ用エアセル2LDを膨張させることで(図2)、揺動部材20を介して、足裏部材12を前方に揺動させることができ、つま先側部14は前方に移動し、かつ、踵側部15は、反対である後方に移動し、被施療者の足80を、脛81に対して前方に伸張させる(図2の状態)。
このように、足裏部材12のつま先側部14は、中立位置から、前後の両方向に移動し、かつ、踵側部15は、つま先側部14と反対方向に移動し、被施療者の足80を、脛81に対して後方と前方との両側に屈伸させることが可能となる。
【0030】
〔2.3 ストレッチユニット1におけるその他の構成〕
前記のとおり、被施療者の足80を後方と前方との両側に屈伸させることが可能であるが、この際、当該足80を足裏部材12に追従させるために、足80を足裏部材12に固定するのが好ましい。そこで、図5(a)に示しているように、足裏部材12は、被施療者の足80の少なくとも甲80aを上から押さえて、当該足80を足載せ面13に固定する固定部材24を有している。なお、図1、図2、図3では、説明を容易とするために固定部材24の記載を省略している。
【0031】
図5(a)の固定部材24は、足裏部材12に取り付けられており、足裏側にある板状の底部24dと、この底部24dと共に甲80aを囲む第1バンド24aと、踵80bを左右及び後方から囲むサポート部24cと、このサポート部24cと共に踵80b及び足首の裾部80cを囲む第2バンド24bとを有している。
また、図5(b)は固定部材24の変形例であり、この固定部材24は足80を入れる靴形状となっており、足裏部材12に取り付けられている。この靴形状を有する固定部材24も、甲80aを上から押さえることができ、また、足80全体を保持することができる。
【0032】
また、図5(a)と(b)に示しているように、足裏部材12の足載せ面13の中央には、エアの給気又は排気によって膨張又は収縮する押し付け用エアセル25が設けられている。このエアセル25が足裏83の中央部を押し上げ、前記固定部材24が甲80aを上から押さえていることにより、足80を足裏部材12と一体化させることができ、足裏部材12の揺動に足80を追従させやすくなる。なお、図5(b)の場合、エアセル25は、靴の中に設けられている。
また、前記固定部材24は、足載せ面13に対して着脱可能として足裏部材12に取り付けられていてもよい。これは、被施療者の足80のサイズは、人それぞれ異なることによる。特に図5(b)の靴型の場合に着脱可能な構成は好適である。
【0033】
また、ストレッチユニット1は、足載せ面13のつま先側に設けられたつま先用エアセル16を有している。このエアセル16は、エアの給気又は排気によって膨張又は収縮し、被施療者の足先(つま先)を当該足載せ面13から離す方向に押圧することができる。
図5(a)の場合、固定部材24の底部24dは、可撓性を有する部材(例えばゴム)からなり、この底部24dと足裏部材12(板状部材18a)との間に、エアセル16が設けられている。
図5(b)の場合、靴型の固定部材24の底部24dは、可撓性を有する部材(例えばゴム)からなり、この底部24dと足裏部材12(板状部材18a)との間に、エアセル16が設けられている。
【0034】
つま先用エアセル16、及び、前記押し付け用エアセル25は、図4に示しているように、弁10−7,10−8を通じて、ポンプ9からエアの供給を受けることができる。弁10−7,10−8それぞれの切り替え動作は、前記制御装置7の制御信号に基づく。つま先用エアセル16、及び、押し付け用エアセル25は、左右それぞれに設置されており、左右のつま先用エアセル16は、膨張と収縮に関して独立して制御され、左右の押し付け用エアセル25も、膨張と収縮に関して独立して制御される。
つま先用エアセル16を有するストレッチユニット1によれば、図3に示しているように、足裏部材12のつま先側部14を後方へ移動させると、被施療者の足80を屈する運動が行われ、アキレス腱を伸ばすことができるが、さらに、この運動を行っている状態で、つま先用エアセル16を膨張させると、より足(足裏)を伸ばす運動を被施療者に与えることが可能となる。
【0035】
〔2.4 本実施形態のストレッチユニット1について〕
また本実施形態の施療機Mでは、ストレッチユニット1が、図外のベッドの上面(前後方向及び左右方向に広がる平面)に設置された状態で、このベッドの上面と、つま先側部14が前方に位置した前傾姿勢(図2)にある足裏部材12との間に形成される空間Hに、ストレッチ用エアセル2LU,2LDが膨張可能で、かつ、揺動部材20が揺動可能として配置されている。この空間Hは、フレーム11内において、前傾姿勢にある足裏部材12の足載せ面13とは反対側に形成される空間であり、足裏部材12が前傾姿勢にある状態(後述する前方ストロークエンド)で、側面視においてほぼ三角形に形成される空間である。
【0036】
そして、揺動部材20の先部22の軌道が、前傾姿勢にある足裏部材12の踵側部15からつま先側部14へ向かう斜め前の方向となるように、揺動部材20はフレーム11に取り付けられている。
このように、前記空間Hに、つまり、足裏部材12の前方下部のデッドスペース(空間H)に、揺動部材20及びストレッチ用エアセル2LU,2LDを効率良く配置することができ、コンパクトにストレッチユニット1を構成することができる。
【0037】
さらに、この構成によれば、足裏部材12のつま先側部14を前後に動かすための揺動部材20の、先部22の移動方向は、足裏部材12のつま先側部14の移動方向である前後方向とは一致しないが、変換部材(ローラ)8が設けられていることにより、ストレッチ用エアセル2LU,2LDにより、揺動部材20を介して、足裏部材12を前後に揺動させることができる。つまり、ストレッチ用エアセル2LU,2LDによる揺動部材20の先部22の動作方向を、足裏部材12のつま先側部14の移動方向である前後方向と同じ方向にする必要がない。
【0038】
また、本実施形態では、施療機Mの使用開始直前の初期状態では、揺動部材20はストレッチ用エアセル2LU,2LDから駆動力を受けていない状態(非可動状態)にある。この初期状態(非可動状態)では、足裏部材12は、つま先側部14が最前端に位置する前方ストロークエンドにある(図2の状態)。
この初期状態(非可動状態)では、足裏部材12のつま先側部14が最前部に位置して足載せ面13が前傾姿勢にあるので、図外のベッド上に設置した施療機Mのストレッチユニット1に、施療者が足80を載せようとする場合に、当該被施療者は足80を足載せ面13に載せやすい。
【0039】
そして、この図2の状態から、揺動部材20が、ストレッチ用エアセル2LUから駆動力を受けることによって、足裏部材12を揺動させ、当該足裏部材12は、つま先側部14が最後端に位置する後方ストロークエンドに達する(図3の状態)。
つまり、足裏部材12が前方ストロークエンドに位置している状態(図2)から、ストレッチ用エアセル2LUが膨張を続けると、単独で、足裏部材12を後方ストロークエンド(図3)まで揺動させることができる。つまり、1つのストレッチ用エアセル2LUの膨張により、足裏部材12を前方ストロークエンドから後方ストロークエンドまで揺動させることができる。
このために、前記ストレッチ用エアセル2LUの膨張ストロークは、揺動部材20を介して、足裏部材12を前方ストロークエンドから後方ストロークエンドまで単独により揺動させることができる長さに相当するストロークに設定されている。
【0040】
〔3.拘束ユニット5について〕
図1において、前記拘束ユニット5は、前後方向に移動してストレッチユニット1に対して接離する本体部50と、ベッド等の上に置かれるフレーム52とを有している。本体部50は、フレーム52の左右の側壁53,53にガイドされ、前後に移動可能となっている。図6は、施療機Mの下面図である。拘束ユニット5は、本体部50を前後方向に駆動する駆動装置(前後駆動装置)54を有している。
【0041】
駆動装置54は、フレーム52に固定されたモータ61、前後方向に長いネジ軸63、モータ61の回転力をネジ軸63へ伝える減速器62を有し、モータ61の正逆回転によりネジ軸63が正逆回転する。モータ61の回転方向の変更は、前記制御装置7からの制御信号に基づく。
本体部50の裏面には、前記ネジ軸63に螺合するナット部材64が取り付けられている。モータ61が一方向に回転すると、ナット部材64は前進し、これにより、本体部50はストレッチユニット1に接近する。モータ61が他方向に回転すると、ナット部材64は後退し、これにより、本体部50はストレッチユニット1から離れる。制御装置7によって、モータ61の回転方向を周期的に変更することで、本体部50は、ストレッチユニット1に対して接近と離反とを繰り返す。
【0042】
図1において、前記本体部50は、ベース部55と、このベース部55に対して動作する可動部56とを有している。図7に示しているように、ベース部55は、底板55aと左右の側板55bとを有し、底板55aの裏面に前記ナット部材64(図6参照)が取り付けられている。
図1において、可動部56は、左右の側壁57と中央壁58とを有し、この可動部56には、左右の凹溝56aが形成されている。この凹溝56aに、被施療者は脛81を入れることができる。
【0043】
そして、拘束ユニット5は、被施療者の脛81を本体部50(可動部56)に拘束する拘束部51を有している。本実施形態の拘束部51は、エアの供給又は収縮により膨張又は収縮する拘束用エアセル59,60からなる。エアセル59,60は、左右の凹溝56a,56aそれぞれに設けられており、各凹溝56aの前側に、対のエアセル59が対向して配置されており、各凹溝56aの後ろ側に、対のエアセル60が対向して配置されている。本実施形態では、エアセル59,60はそれぞれ、前記側壁57及び中央壁58に取り付けられている。
【0044】
これらエアセル59,60は、図4に示しているように、弁10−9,10−10を通じて、ポンプ9からエアの供給を受けることができる。弁10−9,10−10それぞれの切り替え動作は、前記制御装置7の制御信号に基づく。
この拘束部51によれば、前側の向かい合うエアセル59及び後ろ側の向かい合うエアセル60の一方又は双方が膨張すると、被施療者の脛81を左右両側から挟むことができ、当該脛81を本体部50に固定することができる。
【0045】
また、図8において、本実施形態の前記可動部56は分割構造(三分割構造)であり、前記側壁57を有する左右の側部ブロック65と、前記中央壁58を有する中央ブロック66とを有している。これらブロック65,66は、駆動装置(さすり駆動装置)67によって、ベース部55に対して前後方向の動作成分を有して前後往復動作することができる。
【0046】
図7において、ベース部55の左右の側壁55bの前側部には、左右方向に長いガイド軸73が取り付けられている。一方、図8において、左右の側部ブロック65及び中央ブロック66それぞれには、前後方向に長い長穴74aを有する長穴ホルダ74が取り付けられている。この長穴74aをガイド軸73が挿通しており、左右の側部ブロック65及び中央ブロック66それぞれは、ガイド軸73及び長穴ホルダ74によってガイドされながら、前後方向に移動自在である。
【0047】
そして、図7と図8とにおいて、前記駆動装置67は、ベース部55に設置された、モータ68、左右の側壁55bに支持された左右方向に長い回転軸70、モータ68の回転力を回転軸70へ伝える減速器69を有し、モータ68の正逆回転により回転軸70が正逆回転する。モータ61の回転方向及び回転速度の変更は、前記制御装置7からの制御信号に基づく。
【0048】
回転軸70の途中部には、偏心カム71a,71bが回転軸70と一体回転可能として取り付けられている。左右両外側寄りの四つの偏心カム71aは、同位相で回転するが、内側の二つの偏心カム71bは共に、外側の偏心カム71aと異なる位相(180°の位相差)で回転する。
図8において、外側の偏心カム71aの外周側には、相対回転可能な環状のカムホルダ72aが取り付けられており、このカムホルダ72aは、前記側部ブロック65に固定されている。また、中央の偏心カム71bの外周側には、相対回転可能な環状のカムホルダ72bが取り付けられており、このカムホルダ72bは、前記中央ブロック66に固定されている。
【0049】
以上の構成によれば、モータ68が回転すると、偏心カム71a,71bは、180°の位相差で回転する。これにより、左右の側部ブロック65の前側部は、前記ガイド軸73によって前後方向にガイドされながら、当該左右の側部ブロック65の後側部は、同位相で偏心回転する。そして、中央ブロック66の前側部は、前記ガイド軸73によって前後方向にガイドされながら、中央ブロック66の後側部は、前記側部ブロック65と異なる位相で、偏心回転する。
これにより、図1を参考に説明すると、モータ68が回転すると、左右の側部ブロック65及び中央ブロック66は、被施療者の脛(下腿部)の両側部に対して、左右で異なる位相により、前後方向の成分が主でかつ上下方向の成分を副として有した往復動作(偏心円運動)を行い、拘束用エアセル59,60を膨張させた状態で、当該脛に対してさすり動作を行うことが可能である。
【0050】
つまり、拘束ユニット5の本体部50(左右の側部ブロック65及び中央ブロック66)に設けられている前記拘束用エアセル59,60は、被施療者の脛に接触すると共に前後方向に動作するマッサージ具として機能することもでき、拘束ユニット5は、さすりユニットと呼ぶこともできる。
【0051】
図1と図6において、ストレッチユニット1のフレーム11と、拘束ユニット5のフレーム52とは、一体であってもよいが、別体としてこれらフレーム11とフレーム52とを、連結部材4によって、連結及び分解可能な構成とするのが好ましい。連結部材4は、両フレーム11,52同士を固定するボルトナット等を有する構成とすればよい。この連結部材4により、連結させて一体とした状態のストレッチユニット1と拘束ユニット5とを、分離することができ、例えば、被施療者に合わせて拘束ユニット5を用いずに、ストレッチユニット1のみをベッド等の上に設置してもよい。
【0052】
〔4.施療機Mによる施療動作について〕
前記制御装置7の記憶部にはコンピュータプログラムが記憶されており、このプログラムに基づいて、制御装置7が、ストレッチユニット1の各部を制御することにより、当該ストレッチユニット1単独でも、前記のとおり、被施療者の足80を、中立位置から後方と前方との両側に屈伸させる施療(ストレッチ運動)を与えることが可能である。
また、制御装置7が、拘束ユニット5の各部を制御することにより、ストレッチユニット1の動作に合わせて拘束ユニット5を動作させることで、より効果的な施療を行うことが可能となる。
【0053】
〔4.1 施療動作の具体例(その1)〕
図9は、前記実施形態(図1)の施療機Mによって実行される施療方法を説明するタイムチャートである。図9の左欄の「エアセル」の項目は、各エアセルの膨張(給気)又は収縮(排気)の時間帯を示しており、「さすり」は前記さすり動作を実行している時間帯を示しており、「スライド」はストレッチユニット1に対する拘束ユニット5の前後移動(接離移動又は接近移動)の時間帯を示している。
施療機Mの初期状態では、拘束ユニット5はストレッチユニット1に最も接近した状態にあり、また、左右の足裏部材12は共に前方ストロークエンドに位置している(図2の状態、ただし、エアセル2LDには給気されていない)。
【0054】
(時間t=1〜16について)
後ろ側の拘束用エアセル60(図1参照)に給気を行い膨張させ被施療者の脛81を拘束した状態で、ストレッチ用エアセル2RU,2LUに給気を行い膨張させる。すると、図3に示しているように、左右の足裏部材12が、前方ストロークエンドから後方ストロークエンドへと達する(t=16)。その途中で、左右の足裏部材12の押し付け用エアセル25を膨張させ固定部材24と協働して、被施療者の左右の足80を足裏部材12に固定している。
これにより、ストレッチユニット1において、足裏部材12のつま先側部14を後方へ移動させることができ、被施療者の足80(足首の関節82)を後方に屈する運動が行われ、アキレス腱を伸ばすことができる(t=1〜16)。この足裏部材12の動作開始に遅れてその途中で(t=9)、脛を拘束した(かつ一旦離反させておいた)拘束ユニット5の本体部50を、ストレッチユニット1に接近する方向に移動させる制御も行う(t=9〜16)。これにより、被施療者の踵が足裏部材12(足載せ面13)から離れようとするのを防ぐことができ、足を屈する運動をより効果的に行うことができる。
そして、足裏部材12が後方ストロークエンドへ到達する前に(t=12)、左右のつま先用エアセル16に給気を行い膨張させ、足80(足裏83)を伸ばす運動も行う。この際(t=12)、拘束用エアセル60を排気状態に切り替え、足80への過度の負担を和らげている。
【0055】
(時間t=17〜29について)
拘束用エアセル59,60の状態を切り替え、前側の拘束用エアセル59に給気を行い膨張させ被施療者の脛81を拘束した状態で、ストレッチ用エアセル2RD,2LDに給気を行い膨張させる。この際、膨張していたエアセル2RU,2LUを排気状態とする。これにより、図2に示しているように、左右の足裏部材12が、後方ストロークエンドから前方ストロークエンドへと達する(t=29)。この際、膨張していた左右の足裏部材12の押し付け用エアセル25を収縮状態としている。
これにより、ストレッチユニット1において、足裏部材12のつま先側部14を前方へ移動させることができ、被施療者の足80(足首の関節82)を前方へ伸ばす運動が行われる(t=17〜29)。この足裏部材12の動作開始に遅れてその途中で(t=25)、脛を拘束した拘束ユニット5の本体部50をストレッチユニット1から離れる方向に移動させる制御も行う(t=25〜29)。これにより、被施療者の足80から脛81までの範囲を広く伸ばすことができ、より効果的な施療(運動)が行われる。つまり、固定部材24(図5参照)によって足80がストレッチユニット1(足裏部材12)に固定された状態で、拘束ユニット2によって脛を後方へ引っ張る運動が行われる。
【0056】
そして、再び、ストレッチ用エアセル2RU,2LUに給気を行い膨張させ、足裏部材12を中立位置とし、拘束ユニット5をストレッチユニット1に接近させ前後中間位置とする(時間t=30〜32)。
【0057】
(時間t=33〜64について)
この時間帯では、前記の時間t=1〜32までと同じ動作が施療機Mにおいて繰り返し実行されるが、さらに、さすり動作も行われる。前半(時間t=33〜48)と後半(時間t=49〜61)とでは、さすり運動に関して、側部ブロック65及び中央ブロック66の、前記偏心円運動の回転方向を切り替えている。
【0058】
〔4.2 施療動作の具体例(その2)〕
図10は、前記実施形態(図1)の施療機Mによって実行される他の施療方法を説明するタイムチャートである。図10の施療方法は、図9の時間t=1〜16までの各「エアセル」(及び「さすり」)について、同じであるが、拘束ユニット5の「スライド」の方向を反対としている。すなわち、制御装置7は、ストレッチユニット1において、ストレッチ用エアセル2LU,2RUを膨張させて、足裏部材12のつま先側部14を後方へ移動させている状態で、脛81を拘束した拘束ユニット5の本体部50をストレッチユニット1から離れる方向に移動させる制御を行う。
特に、足裏部材12のつま先側部14の後方への移動と、拘束ユニット5の本体部50の後方への移動とを、少なくとも一部の時間帯で同時に行えばよいが、図10に示しているように、足裏部材12のつま先側部14の後方への移動(離反)を先に開始して(t=1)、その移動の途中で(t=9)、本体部50の後方への移動を行うのが好ましい。
これにより、被施療者の足80及び脚において、心臓に遠い部位から近い部位へ向かって施療箇所が移動するいわゆる求心法による施療が行われ、血液循環の促進が図れる。
【0059】
また、時間t=17〜29の時間帯では、制御装置7は、ストレッチユニット1において、ストレッチ用エアセル2LD,2RDを膨張させて、足裏部材12のつま先側部14を前方へ移動させている状態で、脛81を拘束した拘束ユニット5の本体部50をストレッチユニット1に接近する方向(前方)に移動させる制御を行う。
特に、図10に示しているように、本体部50の前方への移動(接近)を先に開始して(t=20)、その移動の途中で(t=23)、足裏部材12のつま先側部14の前方への移動を行うのが好ましい。
これにより、被施療者の足80及び脚において、心臓に近い部位から遠い部位へ向かって施療箇所が移動するいわゆる遠心法による施療が行われ、血液循環の促進が図れる。
【0060】
〔4.3 施療動作の具体例(その3)〕
図9の各「エアセル」及び「さすり」については、同じであるが、「スライド」を実行しなくてもよい。つまり、時間t=1〜32では、拘束ユニット5の本体部50の前後移動は実行されない。なお、時間t=33〜64では、さすり動作については実行される。
【0061】
〔4.4 施療動作の具体例(その4)〕
図9の施療動作は、ストレッチユニット1において、左右の足裏部材12を同じ位相で同期して動作させる場合であったが、左右の足裏部材12は、既に説明したように、左右それぞれ独立して設けられており、独立して揺動することができる構成であるため、左右の足裏部材12を異なる位相で動作させることができる。
そこで、制御装置7は、ストレッチ用エアセル2LU,2LD、ポンプ9等を有する駆動装置3を制御することにより、左足用の足裏部材12と右足用の足裏部材12とを、同位相で揺動させる第1動作モードと、異なる位相で揺動させる第2動作モードとに切り替え可能である。第2動作モードを選択することにより、図1のように、一方の足裏部材12を前、他方の足裏部材12を後ろとすることができ、また、これを交互に行うことが可能である。
【0062】
〔4.5 施療動作の具体例(その5)〕
図4において、制御装置7からの制御信号により、各バルブ10の開閉状態を切り替えることができる。代表して、左側の足80用のストレッチ用エアセル2LU,2LDについて、図2と図3を参照しつつ説明する。被施療者が足80を足裏部材12に載せ、固定部材24によって固定した状態で、ストップ弁10−1及び3方向弁10−3,10−4を通じて、エアセル2LU,2LDの双方に給気を行い膨張させる。すると、足80(足裏部材12)を、ほぼ中立位置とすることができる。
【0063】
この状態で、ストップ弁10−1を切り替え、エアセル2LU,2LD側の流路P1を封止した状態とする。3方向弁10−3,10−4は、そのままであり、前記流路P1とエアセル2LU,2LDとの間でエアの流れは自由であるが、エアセル2LU,2LD内のエアが大気に開放されない。これにより、流路P1のエアは、外部へ漏れることができず、両側のエアセル2LU,2LDを膨張状態で保持することができ、かつ、両側のエアセル2LU,2LD間でエアの流れを許容している状態となる。
【0064】
この場合、被施療者が、自らの足80の力で足裏部材12を前後一方に揺動させ、揺動部材20を介して、一方のストレッチ用エアセル(例えば2LU)を圧縮させると、このストレッチ用エアセル(2LU)から、他方のストレッチ用エアセル(2LD)へとエアが流れ、被施療者は、自力で足80を屈伸させることができる。なお、この自力による運動は、反対でも可能であり、前後方向に交互に行うことができる。そして、ストレッチ用エアセル2LU,2LDは膨張状態で保持されているので、自力によるこの運動は、負荷が与えられた状態で行われる。このように、施療機Mを用いているが、被施療者の自力による運動を「自動運動」と呼ぶ。
【0065】
前記「自動運動」に対し、前記施療動作の具体例(その1)〜(その4)のように、施療機Mが駆動して被施療者に強制的な運動を与える場合を「他動運動」と呼ぶ。そして、本実施形態では、操作器7aに、自動運動と他動運動との切り替え用スイッチが設けられており、操作器7aが操作されることにより、操作器7aからの切り替え信号に基づいて、制御装置7は、自動運動と他動運動とを切り替えて、施療機Mを機能させることができる。
また、自動運動と他動運動とを択一的に選択して切り替えるのみならず、操作器7aにおける操作によって、自動運動と他動運動との双方を施療機Mに行わせることもできる。つまり、制御装置7には、自動運動のみを実行させるコース(プログラム)と、他動運動のみを実行させるコース(プログラム)と、自動運動と他動運動との双方を実行させるコース(プログラム)とが設定されている。双方を実行させる場合、例えば、制御装置7は、自動運動を(2〜3分)実行し、その後、他動運動を(4〜6分)実行し、再び、自動運動を(2〜3分)実行する。なお、自動運転及び他動運転の実行時間は任意に設定することができる。
自動運動と他動運動との切り替えは、操作器7aを操作することにより行ってもよいが、制御装置7が時間管理を行い自動的に自動運動と他動運動との切り替えを行ってもよい。自動運転終了から所定時間経過後に他動運転に自動的に切り替わることにより、又は、被施療者が自ら切り替えることにより、使用者を休憩させることができる。
【0066】
また、前記各施療動作(その1)〜(その5)の少なくとも一つを実行するためのプログラムが制御装置7に記憶されており、操作器7aを操作することにより施療動作を択一的に選択して実行することができる。
【0067】
〔5.その他の施療機について〕
前記拘束ユニット5は、被施療者の足首の関節から先の足を中立位置から後方と前方との両側に脛に対して屈伸させるストレッチユニットを備えた施療機に適用可能であり、このストレッチユニット1の形態は、前記実施形態以外の場合であってもよい。
つまり、その施療機は、拘束ユニットと、被施療者の足首の関節から先の足を中立位置から後方と前方との両側に脛に対して屈伸させるストレッチユニットと、を備え、前記拘束ユニットは、前後方向に移動して前記ストレッチユニットに対して接離する本体部と、被施療者の脛を前記本体部に拘束する拘束部とを有する拘束ユニットと、前記ストレッチユニット及び前記拘束ユニットの動作を制御する制御装置と、を備えたものである。
そして、この場合に、拘束ユニット及びストレッチユニットそれぞれは、既に説明した前記各構成(各機能)の少なくとも一つを備え、前記説明した動作を行うものである。
【0068】
また、本発明の施療機は、図示する形態に限らず本発明の範囲内において他の形態のものであってもよい。前記実施形態では、ベッド上等の水平面に施療機Mを載置して用いる場合を説明したが、椅子の前部に取り付けてもよく、この場合、椅子に着座した使用者の足側にストレッチユニットが配置され、脛側に拘束ユニットが配置される。そして、ストレッチユニット及び拘束ユニットにより、足載置部が構成され、この足載置部は、座部側を支点として上下に回動自在として椅子のフレームに取り付けられており、アクチュエータによって、上下回動駆動する。そして、足載置部を上げた状態(ストレッチユニット及び拘束ユニットがほぼ水平状に並んだ状態)、又は、足載置部を下げた状態(ストレッチユニットの上に拘束ユニットが並んだ状態)で、施療が可能となる。
そして、この椅子は、背凭れ部、及び、この背凭れ部にマッサージ具が設けられている椅子型マッサージ機であってもよい。
【符号の説明】
【0069】
1:ストレッチユニット、 2:ストレッチ用エアセル、 2LU:ストレッチ用エアセル、 2LD:ストレッチ用エアセル、 2RU:ストレッチ用エアセル、 2RD:ストレッチ用エアセル、 3:駆動装置、 5:拘束ユニット、 7:制御装置、 8:変換部材、 9:ポンプ、 10:バルブ、 11:フレーム、 12:足裏部材、 13:足載せ面、 14:つま先側部、 15:踵側部、 16:つま先用エアセル、 20:揺動部材、 21:基部、 22:先部、 50:本体部、 51:拘束部、 80:足、 81:脛、 82:足首の関節、 83:足裏、 C1:第1の中心線、 C2:第2の中心線、 H:空間、 M:施療機
【特許請求の範囲】
【請求項1】
被施療者の足首の関節から先の足を中立位置から後方と前方との両側に脛に対して屈伸させるストレッチユニットを備えた施療機であって、
前記ストレッチユニットは、
フレームと、
被施療者の足裏を載せる足載せ面を有し左右方向の第1の中心線回りに揺動可能として前記フレームに取り付けられつま先側部が中立位置から前後の両方向に移動可能である足裏部材と、
左右方向の第2の中心線回りに揺動可能として基部が前記フレームに取り付けられ先部が前記つま先側部の移動方向と異なる方向に移動可能である揺動部材と、
エアの給気によって膨張することで前記揺動部材を前記第2の中心線回りに揺動させるストレッチ用エアセルを有する駆動装置と、
前記揺動部材と前記足裏部材との間に介在し当該揺動部材の揺動を前記足裏部材の揺動に変換する変換部材と、
を備えたことを特徴とする施療機。
【請求項2】
前後方向に移動して前記ストレッチユニットに対して接離する本体部と、被施療者の脛を前記本体部に拘束する拘束部とを有する拘束ユニットと、
前記ストレッチユニット及び前記拘束ユニットの動作を制御する制御装置と、を更に備え、
前記制御装置は、前記ストレッチユニットにおいて前記足裏部材の前記つま先側部を前方へ移動させている状態で、脛を拘束した前記本体部を当該ストレッチユニットから離れる方向に移動させ、前記足裏部材の前記つま先側部を後方へ移動させている状態で、脛を拘束した前記本体部を当該ストレッチユニットに接近する方向に移動させる制御を行う請求項1に記載の施療機。
【請求項3】
前後方向及び左右方向に広がる仮想平面上に前記ストレッチユニットが配置されているとした場合に、前記つま先側部が前方に位置した前傾姿勢にある前記足裏部材と、前記仮想平面との間に形成される空間に、前記ストレッチ用エアセルが膨張可能でかつ前記揺動部材が揺動可能として配置されており、
前記揺動部材の前記先部の軌道が、前記前傾姿勢にある足裏部材の踵側部からつま先側部へ向かう方向となるように、当該揺動部材は前記フレームに取り付けられている請求項1又は2に記載の施療機。
【請求項4】
前記ストレッチユニットは、前記足載せ面のつま先側に設けられエアの給気によって膨張し被施療者の足先を当該足載せ面から離す方向に押圧する、つま先用エアセルを備えている請求項1から3のいずれか一項に記載の施療機。
【請求項5】
前記足裏部材を前記中立位置から正逆両方向に揺動駆動させるために、前記ストレッチ用エアセルは、前記揺動部材を挟んだ両側に配置されており、
前記駆動装置は、エアを吐出するポンプ、及び、当該ポンプと前記ストレッチ用エアセルとの間に設けられエアの流れを切り替えるバルブを有し、
前記バルブは、前記両側のストレッチ用エアセルを膨張状態で保持するとともに、当該両側のストレッチ用エアセル間でエアの流れを許容している状態に、切り替え可能である請求項1から4のいずれか一項に記載の施療機。
【請求項6】
前記揺動部材が前記ストレッチ用エアセルから駆動力を受けていない非可動状態では、前記足裏部材は、前記つま先側部が最前端に位置する前方ストロークエンドにあり、
前記揺動部材が前記ストレッチ用エアセルから駆動力を受けることによって、前記足裏部材を揺動させ、当該足裏部材は、前記つま先側部が最後端に位置する後方ストロークエンドに達し、
前記ストレッチ用エアセルは、前記揺動部材を介して、前記足裏部材を前記前方ストロークエンドから前記後方ストロークエンドまで単独により揺動させることができる長さに相当する、膨張ストロークを有している請求項1から5のいずれか一項に記載の施療機。
【請求項1】
被施療者の足首の関節から先の足を中立位置から後方と前方との両側に脛に対して屈伸させるストレッチユニットを備えた施療機であって、
前記ストレッチユニットは、
フレームと、
被施療者の足裏を載せる足載せ面を有し左右方向の第1の中心線回りに揺動可能として前記フレームに取り付けられつま先側部が中立位置から前後の両方向に移動可能である足裏部材と、
左右方向の第2の中心線回りに揺動可能として基部が前記フレームに取り付けられ先部が前記つま先側部の移動方向と異なる方向に移動可能である揺動部材と、
エアの給気によって膨張することで前記揺動部材を前記第2の中心線回りに揺動させるストレッチ用エアセルを有する駆動装置と、
前記揺動部材と前記足裏部材との間に介在し当該揺動部材の揺動を前記足裏部材の揺動に変換する変換部材と、
を備えたことを特徴とする施療機。
【請求項2】
前後方向に移動して前記ストレッチユニットに対して接離する本体部と、被施療者の脛を前記本体部に拘束する拘束部とを有する拘束ユニットと、
前記ストレッチユニット及び前記拘束ユニットの動作を制御する制御装置と、を更に備え、
前記制御装置は、前記ストレッチユニットにおいて前記足裏部材の前記つま先側部を前方へ移動させている状態で、脛を拘束した前記本体部を当該ストレッチユニットから離れる方向に移動させ、前記足裏部材の前記つま先側部を後方へ移動させている状態で、脛を拘束した前記本体部を当該ストレッチユニットに接近する方向に移動させる制御を行う請求項1に記載の施療機。
【請求項3】
前後方向及び左右方向に広がる仮想平面上に前記ストレッチユニットが配置されているとした場合に、前記つま先側部が前方に位置した前傾姿勢にある前記足裏部材と、前記仮想平面との間に形成される空間に、前記ストレッチ用エアセルが膨張可能でかつ前記揺動部材が揺動可能として配置されており、
前記揺動部材の前記先部の軌道が、前記前傾姿勢にある足裏部材の踵側部からつま先側部へ向かう方向となるように、当該揺動部材は前記フレームに取り付けられている請求項1又は2に記載の施療機。
【請求項4】
前記ストレッチユニットは、前記足載せ面のつま先側に設けられエアの給気によって膨張し被施療者の足先を当該足載せ面から離す方向に押圧する、つま先用エアセルを備えている請求項1から3のいずれか一項に記載の施療機。
【請求項5】
前記足裏部材を前記中立位置から正逆両方向に揺動駆動させるために、前記ストレッチ用エアセルは、前記揺動部材を挟んだ両側に配置されており、
前記駆動装置は、エアを吐出するポンプ、及び、当該ポンプと前記ストレッチ用エアセルとの間に設けられエアの流れを切り替えるバルブを有し、
前記バルブは、前記両側のストレッチ用エアセルを膨張状態で保持するとともに、当該両側のストレッチ用エアセル間でエアの流れを許容している状態に、切り替え可能である請求項1から4のいずれか一項に記載の施療機。
【請求項6】
前記揺動部材が前記ストレッチ用エアセルから駆動力を受けていない非可動状態では、前記足裏部材は、前記つま先側部が最前端に位置する前方ストロークエンドにあり、
前記揺動部材が前記ストレッチ用エアセルから駆動力を受けることによって、前記足裏部材を揺動させ、当該足裏部材は、前記つま先側部が最後端に位置する後方ストロークエンドに達し、
前記ストレッチ用エアセルは、前記揺動部材を介して、前記足裏部材を前記前方ストロークエンドから前記後方ストロークエンドまで単独により揺動させることができる長さに相当する、膨張ストロークを有している請求項1から5のいずれか一項に記載の施療機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】

【図9】
【図10】

【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−29804(P2012−29804A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−171036(P2010−171036)
【出願日】平成22年7月29日(2010.7.29)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年7月29日(2010.7.29)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]