
施解錠制御システム、施解錠制御方法及び電波送受体
【課題】電波送受体(携帯機)が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作を防止し、施解錠を制御する。
【解決手段】電波送受体30Aは自身に与えられる加速度を検出する加速度検出部31Aを備え、制御装置20Aは対象物CAの施解錠を制御する施解錠制御部22Aを備え、電波送受体30Aと制御装置20Aのいずれか一方又は両方は、対象物CAと電波送受体30Aの距離を測定する距離測定部33Aを備え、施解錠制御部22Aは、距離測定部33Aが測定した距離と加速度検出部31Aが検出した加速度の情報を基に、対象物CAの施解錠を制御する。
【解決手段】電波送受体30Aは自身に与えられる加速度を検出する加速度検出部31Aを備え、制御装置20Aは対象物CAの施解錠を制御する施解錠制御部22Aを備え、電波送受体30Aと制御装置20Aのいずれか一方又は両方は、対象物CAと電波送受体30Aの距離を測定する距離測定部33Aを備え、施解錠制御部22Aは、距離測定部33Aが測定した距離と加速度検出部31Aが検出した加速度の情報を基に、対象物CAの施解錠を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両等を施錠又は解錠するための制御システム、制御方法及び電波送受体に関し、特に、距離情報と加速度情報を用いて施錠又は解錠するための制御システム、制御方法及び電波送受体に関する。
【背景技術】
【0002】
従来から、使用者が携帯可能な携帯機と車両や住宅等に設けられた制御装置との間で行われる無線通信により、車両や住宅等のドアの施錠や解錠を自動的に行うエントリーシステムが広く実用化されている。これは、固有の識別情報を有する携帯機が、対応する制御装置との間で行われる無線通信を通じてその制御装置に認証され、その制御装置が車両や住宅等のドアの施錠動作と解錠動作を実現するものである。
【0003】
即ち、携帯機を携帯した使用者が車両や住宅等に近づくことにより、制御装置との通信可能領域に入り、無線通信が成立して、その携帯機が認証されると、施錠状態にあるドアが自動的に解錠される。逆に、携帯機を携帯した使用者が車両や住宅等から離れることにより、制御装置との通信可能領域から出て、無線通信が成立しなくなると、解錠状態にあるドアが自動的に施錠される。
【0004】
例えば、特許文献1では、車両のスマートエントリーシステムにおいて、ユーザが車両から離れると自動的にドアを施錠するオートロック機能を、使い勝手良くかつ低コストに実現することを目的として、以下のドアロック制御装置が開示されている。即ち、このドアロック制御装置は、携帯機と車載機間でLF−UHF相互通信を行う構成とし、オートロック距離を遠距離又は近距離にユーザが指定可能なオートロック距離スイッチを備える。このスイッチにより近距離が指定されている場合には、車載機から携帯機へのLF通信が成立しなくなったことに基づいてオートロック機能を実行し、遠距離が指定されている場合には、携帯機から車載機へのUHF通信が成立しなくなったことに基づいてオートロック機能を実行するものである。
【0005】
また、特許文献2では、通信装置が携帯機を不必要に認証してしまうことを防止することを目的として、以下の通信システムが開示されている。即ち、この通信システムでは、携帯機は、携帯機が電子制御装置の通信領域に進入し携帯機が電子制御装置から送信される応答要求信号を受信した場合に、この応答要求信号に対する応答として応答信号を送信する。また、電子制御装置は、携帯機が応答要求信号を受信するよりも前の所定期間の間に携帯機の加速度センサが携帯機に付与される加速度を検出した場合に、応答信号に基づいて携帯機を認証する。従って、この通信システムは、応答要求信号を受信するよりも前の所定期間の間に携帯機が移動していた場合に、その携帯機を認証する通信システムである。
【0006】
しかし、特許文献1に開示された従来技術では、車載機等から携帯機への無線通信が成立しなくなったことに基づいてオートロック機能を実行するので、周囲環境の影響による車載機等から出力される信号の受信強度のバラツキや、車載機等の出力回路による信号のバラツキにより、車載機等を備えた車両等と携帯機との実際の通信可能領域がり変化してしまう。その結果、携帯機を携帯する使用者が、通信可能領域の境界付近で立ち止まっていたりすると、施解錠を制御する車載機等の制御装置は、施錠動作と解錠動作を交互に繰り返してしまう。
【0007】
また、特許文献2に開示された従来技術では、携帯機の加速度を検出して、携帯機から車載機等への信号の送信可否を決めているので、携帯機を携帯する使用者が立ち止まっていたりすると、加速度を検出できないので同様の問題が生じ、使用者は、意図しない施錠動作と解錠動作の繰り返しにより煩わしさを感じる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2003−269023号公報
【特許文献2】特開2010−24746号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
そこで、本発明の目的とするところは、携帯機(電波送受体)が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作を防止し、施解錠を制御する制御システム、制御方法、及び電波送受体を提供することである。
【課題を解決するための手段】
【0010】
上記課題を解決するために、電波送受体と、その電波送受体と通信し、特定の対象物の施解錠を制御する制御装置と、を有する制御システムであって、その電波送受体は、自身に与えられる加速度を検出する加速度検出部と、その加速度検出部が検出した加速度の情報を含む信号を送信する信号送信部と、を備え、その制御装置は、その電波送受体のその信号送信部から信号を受信する装置受信部と、その装置受信部が受信した信号に基づき、その対象物の施解錠を制御する施解錠制御部と、を備え、その電波送受体とその制御装置のいずれか一方又は両方は、その対象物とその電波送受体の距離を測定する距離測定部を備え、その施解錠制御部は、その距離測定部が測定した距離と加速度の情報を基に、その対象物の施解錠を制御する制御システムが提供される。
これによれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御システムを提供できる。
【0011】
さらに、その電波送受体とその制御装置のいずれか一方又は両方は、その対象物とその電波送受体の間の距離についての予め定めた距離閾値及び/又はその電波送受体に与えられる加速度についての予め定めた加速度閾値と、を記憶する記憶部と、その距離閾値とその距離測定部が測定した距離とを比較し、その距離測定部が測定した距離が距離閾値以下の場合には、その電波送受体は所定領域内に在ると判定する領域判定部と、加速度閾値とその加速度検出部が検出した加速度とを比較し、その加速度検出部が検出した加速度がその加速度閾値以上の場合には、その電波送受体は移動していると判定する移動判定部と、を備え、その領域判定部がその電波送受体はその所定領域内に在ると判定し、かつ、その移動判定部がその電波送受体は移動していると判定した場合、その施解錠制御部はその対象物を解錠し、その領域判定部がその電波送受体はその所定領域内に在ると判定せず、かつ、その移動判定部がその電波送受体は移動していると判定した場合、その施解錠制御部はその対象物を施錠し、その移動判定部がその電波送受体は移動していると判定しない場合、その施解錠制御部はその対象物の施錠状態又は解錠状態を維持する、ことを特徴としてもよい。
これによれば、施解錠の誤動作を確実に防止することができる。
【0012】
さらに、その記憶部は、距離閾値として予め定めた施錠距離閾値と解錠距離閾値とを記憶しており、その領域判定部は、その施錠距離閾値とその距離測定部が測定した距離とを比較し、その距離測定部が測定した距離がその施錠距離閾値以上の場合には、その電波送受体は施錠領域内に在ると判定し、その解錠距離閾値とその距離測定部が測定した距離とを比較し、その距離測定部が測定した距離がその施錠距離閾値以下の場合には、その電波送受体は解錠領域内に在ると判定し、その領域判定部がその電波送受体はその解錠領域内に在ると判定し、かつ、その移動判定部がその電波送受体は移動していると判定した場合、その施解錠制御部はその対象物を解錠し、その領域判定部がその電波送受体はその施錠領域内に在ると判定し、かつ、その移動判定部がその電波送受体は移動していると判定した場合、その施解錠制御部はその対象物を施錠する、ことを特徴としてもよい。
これによれば、施錠領域と解錠領域を別々に設定でき、柔軟な所定領域の設定が行えることにより、施解錠の誤動作を回避できる。
【0013】
さらに、その施錠距離閾値は、その解錠距離閾値より大であることを特徴としてもよい。
これによれば、施錠領域と解錠領域いずれにも属さない領域を作ることにより、領域でも施錠状態又は解錠状態を維持する領域を形成できる。
【0014】
さらに、その対象物は車両であり、その制御装置はその車両に備えられた車載制御装置であり、その電波送受体はその車載制御装置と通信する携帯機であることを特徴としてもよい。
これによれば、車両の制御システムにおいて、施解錠の誤動作を防止できる。
【0015】
さらに、その車載制御装置は、その携帯機に応答要求信号を送信する装置送信部をさらに備え、その携帯機は、その装置送信部が送信する応答要求信号を受信する信号受信部をさらに備え、その距離測定部と、その加速度閾値を記憶するその記憶部と、その移動判定部は、その携帯機に備えられ、その距離閾値を記憶するその記憶部とその領域判定部は、その車載制御装置に備えられ、その携帯機のその距離測定部は、その信号受信部が受信したその応答要求信号の信号強度を測定し、その携帯機のその信号送信部は、測定されたその信号強度の情報をさらに含むその信号を送信し、その車載制御装置のその装置受信部は、その信号を受信し、その車載制御装置のその領域判定部は、受信したその信号に含まれるその信号強度の情報に基づき、その携帯機がその車両からその所定領域内に在ると判定することを特徴としてもよい。
これによれば、所謂パッシブエントリシステムにおいても、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御システムを提供できる。
【0016】
別の観点によれば、上記課題を解決するために、上記の制御システムに使用される制御装置が提供される。
これによれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御システムにおける制御装置を提供することができる。
【0017】
別の観点によれば、上記課題を解決するために、特定の対象物の施解錠を制御する制御装置と、その対象物の施解錠を制御するために無線通信を行う電波送受体であって、その電波送受体は、自身に与えられる加速度を検出する加速度検出部と、その対象物との距離を測定する距離測定部と、その加速度検出部が検出した加速度の情報とその距離測定部が測定した距離の情報を基にその対象物の施解錠を制御する制御信号を生成する施解錠信号生成部と、その施解錠信号生成部が生成するその制御信号を含む信号を送信する信号送信部と、を備え、その施解錠信号生成部が生成したその制御信号に基づき、その制御装置のその施解錠実行部にその対象物の施解錠を実行させる電波送受体が提供される。
これによれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない電波送受体を提供することができる。
【0018】
別の観点によれば、上記課題を解決するために、電波送受体と制御装置が無線通信手段を介して通信し、特定の対象物の施解錠を制御する制御方法であって、その対象物とその電波送受体の距離を測定し、その電波送受体が、自身に与えられる加速度を検出すると共に、該加速度の情報をその制御装置に送信し、その制御装置が、送信されたその加速度の情報を受信し、受信したその加速度の情報を基に、その加速度が予め定めた加速度閾値以上であることによりその電波送受体が移動していると判定し、測定したその距離を基に、その距離が予め定めた距離閾値以下であることによりその電波送受体が所定領域内に在ると判定し、その電波送受体がその所定領域内に在ると判定し、かつ、その電波送受体が移動していると判定した場合、その対象物を解錠し、その電波送受体がその所定領域内に在ると判定せず、かつ、その電波送受体が移動していると判定した場合、その対象物を施錠し、その電波送受体が移動していると判定しない場合、その対象物の施錠状態又は解錠状態を維持する、制御方法が提供される。
これによれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御方法を提供することができる。
【発明の効果】
【0019】
以上説明したように、本発明によれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作を防止し、施解錠を制御する制御システム、制御方法、及び電波送受体を提供することができる。
【図面の簡単な説明】
【0020】
【図1】本発明に係る第一実施例のブロック図。
【図2】本発明に係る第二実施例のブロック図。
【図3】本発明に係る第二実施例のフローチャート(その一)。
【図4】本発明に係る第二実施例のフローチャート(その二)。
【図5】本発明に係る第三実施例のブロック図。
【図6】本発明に係る第三実施例のフローチャート。
【発明を実施するための形態】
【0021】
以下では、図面を参照しながら、本発明に係る各実施例について説明する。
<第一実施例>
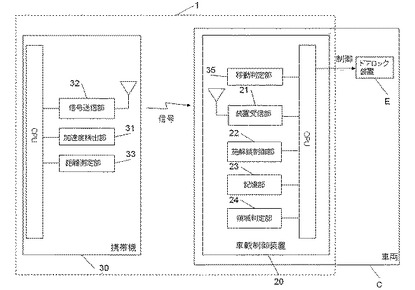
図1は、本発明に係る第一実施例における制御システム1を示すブロック図である。制御システム1は、電波送受体である携帯機30(別名をFOBとも言う)と、特定の対象物である車両Cに備えられ、携帯機30と通信し、車両Cの施解錠を制御する車載制御装置20とを有する。なお、特定の対象物は、車両に限定されるものはなく、施解錠の対象となる車両等の移動体や倉庫等の施設を含むものである。
【0022】
車載制御装置20は、車両Cに設けられた様々な機器を制御するために設けられ、本実施例では、ドアロック装置Eを制御する制御装置である。車載制御装置は、施解錠の対象物と同じ位置にあってもよいし、異なる位置にあってもよい。従って、本実施例では、車載制御装置20は車両Cに備えられているので対象物と同じ位置にあるが、これに限定されず、車載制御装置は車両Cに備えられず、別の場所、例えば、クラウドコンピューティング上にあってもよい。
【0023】
携帯機30は、車両Cの操作を行うために、車両Cの使用者により保持されるものであり、本実施例においては、ドアの施錠・解錠ができる携帯機である。携帯機30は、自身に与えられる加速度を検出する加速度検出部31と、車両Cと携帯機30の距離を測定する距離測定部33と、加速度検出部31が検出した加速度の情報と距離測定部33が測定した距離の情報を含む信号を車載制御装置20に送信する信号送信部32と、を備える。なお、携帯機30は、さらに、携帯機30のこれらの構成要素を制御するCPUを備える。
【0024】
加速度検出部31は、携帯機30自身に与えられる加速度を検出する加速度センサであり、加速度を計測できる機器であれば、機械式、光学式、半導体式等いずれの方式であってもよく、特に限定されない。好ましくは、MEMS(Micro Electro Mechanical Systems)技術を使用し、多軸を検出できる1チップの半導体式の加速度センサである。
【0025】
信号送信部32は、加速度検出部31が検出した加速度の情報を含む信号を車載制御装置20に送信する。具体的には、携帯機30の使用者が車両Cのドアロック装置Eを施錠又は解錠するために携帯機30を操作した際、携帯機30は、車載制御装置20に対して施解錠の制御信号と共に加速度の情報を送信する。使用される帯域は、一般的には、携帯機30から車載制御装置20へはRF帯であるが、これに限定されない。加速度の情報とは、加速度検出部31が検出した加速度の値そのものであってもよいし、加速度の値を加工したものであってもよい。具体的には、加速度の情報は、加速度検出部31によって、使用者が携帯機30を操作した時から所定の時間に計測された値の平均値、最大値、中央値等が計算され、適宜選択される。
【0026】
距離測定部33は、車両Cと携帯機30の距離を測定する。距離の測定方法は、特に限定されないが、例えば、携帯機30がさらに距離センサを備え、車両Cまでの距離を測定してもよい。この場合、携帯機30は、測定した車両Cまでの距離を、信号送信部32から加速度の情報等と共に送信することが好適である。距離測定部33は、車両C上に備えられてもよく、また、携帯機30及び車両C上の両方に備えられてもよい。例えば、前者では、車両Cが携帯機30からの無線信号の強度を計測することにより両者の距離を測定してもよい。また、後者では、携帯機30と車両CがさらにGPSセンサ(Global Positioning System)を備え、両者の位置の相違から両者の距離を算出してもよい。
【0027】
車載制御装置20は、携帯機30の信号送信部32から信号を受信する装置受信部21と、装置受信部21が受信した信号に基づき車両Cの施解錠を制御する施解錠制御部22と、携帯機30に与えられる加速度についての予め定めた加速度閾値及び車両Cと携帯機30の間の距離についての予め定めた距離閾値を記憶する記憶部23と、携帯機30は所定領域内に在るか否かを判定する領域判定部24と、携帯機30が移動しているか否かを判定する移動判定部35と、を備える。なお、車載制御装置20は、さらに、車載制御装置20のこれらの構成要素を制御するCPUを備える。
【0028】
装置受信部21は、携帯機30の信号送信部32からの信号を、アンテナで受信し、復号する。
【0029】
記憶部23は、典型的にはメモリから構成され、車両Cと携帯機30の間の距離についての予め定めた距離閾値を記憶する。距離閾値は、携帯機30を保持した使用者が車両Cからどのくらい離れた場合に車両Cのドアを施錠又は解錠するのかを決定するための閾値として適宜定められる。閾値が小さすぎると使用者が車両Cに近づいているのにドアを解錠しない、逆に、閾値が大きすぎると使用者が車両Cから遠ざかっているのに施錠しないようなこととなり、使用者に不便を与えるので、車両Cの出荷時、メンテナンス時などに適宜適切な閾値が設定され、記憶される。
【0030】
記憶部23は、さらに、携帯機30に与えられる加速度についての予め定めた加速度閾値を記憶する。加速度閾値は、携帯機30の使用者が携帯機30を保持しながら移動しているか否かを判断するための閾値として適宜定められる。閾値が小さすぎると移動していないのに移動していると、逆に、閾値が大きすぎると移動しているのに移動していないと、誤って判定されてしまうので、車両Cの出荷時、メンテナンス時などに、明らかに使用者が移動していると推定できる程度の適切な閾値が設定され、記憶される。
【0031】
ここで、保持しながら移動しているか否かの判断について、より具体的に説明する。
使用者の携帯機30の保持の仕方は、様々である。例えば、携帯機30を手に持って保持する、ポケットに入れた状態で保持する、鞄に入れた状態で保持する、などである。また、携帯機30を保持した使用者は、併せて様々な動きをする。例えば、歩く、走る、給油等のために立ち止まる、軽作業する、屈伸運動などの軽い運動をする、などである。上記例の中では、移動に該当するのは「歩く」と「走る」であり、歩いている状態の加速度と走っている状態の加速度は、その場で立ち止まった状態、軽作業をしている状態、軽い運動をしている状態の加速度に比べると、大きく、かつ、横方向(水平方向)の加速度が生ずることが多い。従って、例えば、三軸の加速度センサを用いると、使用者がその場で上下動作(屈伸動作)をしているのか、歩いているのかを判断することができ、歩いている場合だけ施解錠を行うことが可能となる。このようにして、使用者の行動に伴って、使用者が車両に期待する施解錠動作と実際の車両の施解錠動作とが異なるという誤動作を防止することができる。
【0032】
移動判定部35は、記憶部23が記憶する加速度閾値と携帯機30の加速度検出部31が検出し、装置受信部21を経て得た加速度とを比較し、加速度検出部31が検出した加速度が加速度閾値以上の場合には、携帯機30は移動していると判定する。逆に、移動判定部35は、加速度閾値と検出した加速度とを比較し、検出加速度が加速度閾値未満の場合には、携帯機30は移動していないと判定する。
【0033】
領域判定部24は、記憶部23が記憶する距離閾値と携帯機30の距離測定部33が測定し、装置受信部21を経て得た距離とを比較し、距離測定部33が測定した距離が距離閾値以下の場合には、携帯機30は所定領域内に在ると判定する。逆に、領域判定部24は、距離閾値と測定した距離とを比較し、測定した距離が距離閾値を超える場合には、携帯機30は所定領域外に在ると判定する。なお、領域判定部24は、本実施例では車載制御装置20に備えられるが、これに限定されず、携帯機30に備えられてもよく、好適には、距離閾値を記憶する記憶部23が備えられる機器上に備えられるとよい。
【0034】
施解錠制御部22は、携帯機30の距離測定部33が測定した距離と加速度検出部31が検出した加速度の情報を基に、車両Cの施解錠を制御する。より具体的には、施解錠制御部22は、領域判定部24が携帯機30は所定領域内に在ると判定し、かつ、移動判定部35が携帯機30は移動していると判定した場合、車両Cを解錠する。また、施解錠制御部22は、領域判定部24が携帯機30は所定領域内に在ると判定せず、かつ、移動判定部35が携帯機30は移動していると判定した場合、車両Cを施錠する。また、施解錠制御部22は、移動判定部35が携帯機30は移動していると判定しない場合、車両Cの施錠状態又は解錠状態を維持する。これによれば、携帯機30が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作を確実に防止することができる。
【0035】
別の観点から見れば、これは、携帯機30と車載制御装置20が無線通信手段を介して通信し、特定の対象物である車両Cの施解錠を制御する制御方法である。具体的には、この制御方法は以下のようである。携帯機30が、車両Cと携帯機30の距離を測定し、自身に与えられる加速度を検出すると共に、その加速度と距離の情報を車載制御装置20に送信する。そして、車載制御装置20Aが、送信された加速度と距離の情報を受信し、受信した加速度の情報を基に、その加速度が予め定めた加速度閾値以上であることにより携帯機30が移動していると判定し、受信した距離の情報を基に、その距離が予め定めた距離閾値以下であることにより携帯機30が所定領域内に在ると判定する。携帯機30が所定領域内に在ると判定し、かつ、携帯機30が移動していると判定した場合、車両Cを解錠する。携帯機30が所定領域内に在ると判定せず、かつ、携帯機30が移動していると判定した場合、その対象物を施錠し、携帯機30が移動していると判定しない場合、車両Cの施錠状態又は解錠状態を維持する。
【0036】
さらに、記憶部23は、距離閾値について、予め定めた施錠距離閾値と解錠距離閾値の2つの距離閾値を有し、領域判定部24は、施錠距離閾値と携帯機30の距離測定部33が測定した距離とを比較し、距離測定部33が測定した距離が施錠距離閾値以上の場合には、携帯機30は施錠領域内に在ると判定してもよい。また、領域判定部24は、解錠距離閾値と距離測定部33が測定した距離とを比較し、距離測定部33が測定した距離が施錠距離閾値以下の場合には、携帯機30は解錠領域内に在ると判定してもよい。
【0037】
そして、施解錠制御部22は、領域判定部24が携帯機30は解錠領域内に在ると判定し、かつ、移動判定部35が携帯機30は移動していると判定した場合、車両C、即ちドアロック装置Eを解錠してもよい。また、施解錠制御部22は、領域判定部24が携帯機30は施錠領域内に在ると判定し、かつ、移動判定部35が携帯機30は移動していると判定した場合、ドアロック装置Eを施錠してもよい。こうすることにより、施錠領域と解錠領域を別々に設定でき、柔軟な所定領域の設定が行えることにより、施解錠の誤動作を回避できる。
【0038】
さらに、上記の施錠距離閾値は、解錠距離閾値より大であってもよい。こうすることにより、施錠領域と解錠領域いずれにも属さない領域を作ることにより、領域でも施錠状態又は解錠状態を維持する領域を形成でき、誤動作を起こすことをより防止することができる。
【0039】
<第二実施例>
図2は、本発明に係る第二実施例における制御システム1Aを示すブロック図を示す。なお、以下では、第一実施例と異なる部分を中心に述べる。
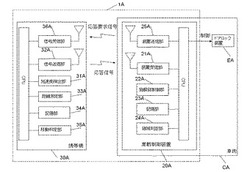
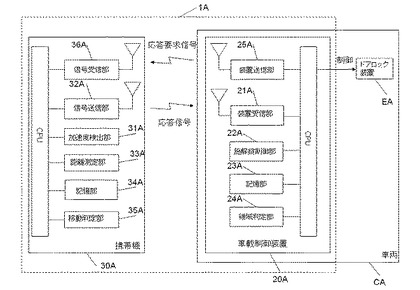
制御システム1Aの車載制御装置20Aは、携帯機30Aに応答要求信号を送信する装置送信部25Aと、携帯機30Aの信号送信部32Aから信号を受信する装置受信部21Aと、装置受信部21Aが受信した信号に基づき車両CAの施解錠を制御する施解錠制御部22Aと、車両CAと携帯機30Aの間の距離についての予め定めた距離閾値を記憶する記憶部23Aと、携帯機30Aは所定領域内に在るか否かを判定する領域判定部24Aと、を備える。
【0040】
制御システム1Aの携帯機30Aは、車載制御装置20Aの装置送信部25Aが送信する応答要求信号を受信する信号受信部36Aと、自身に与えられる加速度を検出する加速度検出部31Aと、加速度検出部31Aが検出した加速度の情報を含む信号を車載制御装置20Aに送信する信号送信部32Aと、車両CAと携帯機30Aの距離を測定する距離測定部33Aと、携帯機30Aに与えられる加速度についての予め定めた加速度閾値を記憶する記憶部34Aと、携帯機30Aが移動しているか否かを判定する移動判定部35Aと、を備える。
【0041】
これにより、制御システム1Aは、所謂パッシブエントリシステムを構成し、携帯機30Aを所持する使用者が携帯機30Aの操作を行わない場合でも、車載制御装置20Aは、携帯機30Aから情報を得ることができる。
【0042】
装置送信部25Aは、所定の信号強度で、定期的に所定の間隔で、携帯機30Aに応答要求信号を送信する。信号受信部36Aは、その応答要求信号を受信する。応答要求信号を信号受信部36Aで受信した携帯機30Aは、使用者の携帯機30Aに対する操作の有無に関係なく、信号送信部32Aから応答信号を車載制御装置20Aに送信する。その応答信号は、加速度検出部31Aが検出した加速度の情報と、距離測定部33Aが測定した車両CAと携帯機30Aの距離の情報とを含む。
【0043】
移動判定部35Aは、記憶部34Aが記憶する加速度閾値と携帯機30の加速度検出部31Aが検出し、装置受信部21Aを経て得た加速度とを比較し、加速度検出部31Aが検出した加速度が加速度閾値以上の場合には、携帯機30Aは移動していると判定する。逆に、移動判定部35Aは、加速度閾値と検出した加速度とを比較し、検出加速度が加速度閾値未満の場合には、携帯機30Aは移動していないと判定する。この判定結果は、加速度の情報として、信号送信部32Aにより車載制御装置20Aに送信される。
【0044】
本実施例では、加速度の情報は、送信する情報の量を低減できるので、信号送信部32Aは、移動判定部35Aが判定を行った結果を示す情報を送信する。しかし、これに限定されず、携帯機30Aと車載制御装置20Aの両方が移動判定部35Aを備えて、処理を分担してもよく、加速度検出部31Aが検出した加速度の値そのものであってもよいし、加速度の値を加工したものであってもよい。加速度は、加速度検出部31Aによって、信号受信部36Aが応答要求信号を受信した時又は受信直後から応答信号を送信するまでの所定の時間に計測された値である。その所定の時間に計測された加速度の値は、平均値、最大値、中央値などが計算され、適宜選択される。
【0045】
また、距離測定部33Aが測定した車両CAと携帯機30Aの距離の情報は、信号受信部36Aが受信した応答要求信号の信号強度から得られる。具体的には、距離測定部33Aは、装置送信部25Aが所定の信号強度で送信した応答要求信号の、信号受信部36Aが受信した信号強度(RSSI:Receive Signal Strength Indication)を計測する。
【0046】
携帯機30Aの信号送信部32Aは、判定結果の加速度の情報と距離の情報(信号強度)を含む応答信号を車載制御装置20Aへ送信する。車載制御装置20Aの装置受信部21Aは、その応答信号を受信する。車載制御装置20Aの領域判定部24Aは、受信した応答信号に含まれる距離情報(信号強度)の情報と、記憶部23Aが記憶する車両CAと携帯機30Aの間の距離についての予め定めた距離閾値(RSSI値)とに基づき、携帯機30Aが車両CAから所定領域内に在るか否かを判定する。
【0047】
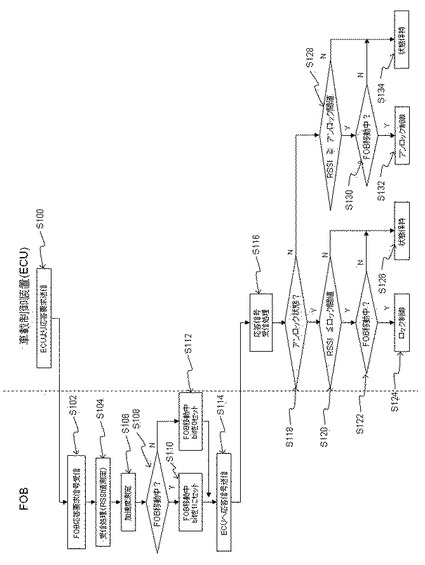
図3は、本実施例における移動判定と領域判定に基づき施解錠を行う制御システム1Aのフローチャートを示す。なお、フローチャートにおいて、「S」は各処理のステップを示すものとする。車載制御装置(ECU)は、S100にて、定期的に所定の間隔で応答要求信号を送信する。その応答要求信号を受信する位置に存在したFOBは、S102にて応答要求信号を受信し、S104にて受信処理即ちRSSI値を測定する。さらに、FOBは、S106にて、ECUからの応答要求信号を受信中又は受信後の加速度を測定する。具体的には、FOB(加速度検出部31A)は、応答要求信号の受信中に自身が受けた加速度、又は受信後の数ミリ秒間に自身が受けた加速度を測定し、その時間の間に受けた加速度の平均値等を算出する。
【0048】
FOBは、S108にて、S106にて測定された加速度と記憶部34Aに記憶された予め定めた加速度閾値とを比較することにより、判定する。FOBは、S110にて、測定された加速度が加速度閾値以上の場合即ちFOBが移動していると判定された場合は、FOBが移動していることを示すフラグ(bit)を1にセットする。FOBは、S112にて、測定された加速度が加速度閾値未満の場合即ちFOBが移動していないと判定された場合は、FOBが移動していないことを示すフラグ(bit)を0にセットする。FOBは、S114にて、S102にて受信した応答要求信号に対して返信するために、ECUに応答信号を送信する。この応答信号は、測定したRSSI値とFOBの移動状態を示すフラグを含む。
【0049】
ECUは、S116にて、FOBからの応答信号を受信する。ECUは、S118にて、現在のドアの施錠・解錠状態(ロック・アンロック状態)を検出する。アンロック状態であった場合、ECUは、S120にて、FOBの応答信号に含まれていたRSSI値と記憶部23Aに記憶されたロックすべき距離閾値(ロック閾値)を比較し、RSSI値がロック閾値以下であった場合、さらにS122にて、FOBの応答信号に含まれていたフラグがFOBが移動中であることを示す場合、S124にて、ドアの施錠(ロック)を行う。
【0050】
ECUは、S120にて、FOBの応答信号に含まれていたRSSI値とロック閾値を比較し、RSSI値がロック閾値を超える値であった場合、または、S122にて、フラグがFOBが移動していないことを示す場合、S126にて、ドアの状態を保持、即ち解錠状態(アンロック状態)を維持する。なお、S120とS122の判断はどちらを先に行ってもよい。
【0051】
ECUは、S118にて現在のドアのロック・アンロック状態を検出し、ロック状態であった場合、S128にて、FOBの応答信号に含まれていたRSSI値と記憶部23Aに記憶されたアンロックすべき距離閾値(アンロック閾値)を比較する。ECUは、RSSI値がアンロック閾値以上であった場合、さらにS130にて、FOBの応答信号に含まれていたフラグがFOBが移動中であることを示す場合、S132にて、ドアの解錠(アンロック)を行う。
【0052】
ECUは、S128にて、FOBの応答信号に含まれていたRSSI値とアンロック閾値を比較し、RSSI値がアンロック閾値未満の値であった場合、または、S130にて、フラグがFOBが移動していないことを示す場合、S134にて、ドアの状態を保持、即ち施錠状態(ロック状態)を維持する。なお、S128とS130の判断はどちらを先に行ってもよい。これによれば、所謂パッシブエントリシステムにおいても、携帯機30Aが通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御システム1Aを提供できる。
【0053】
なお、本フローチャートにおいて、ロック閾値(施錠距離閾値)は、アンロック閾値(解錠距離閾値)と同じ値であっても、ロック閾値がアンロック閾値より大きい値であってもよい。また、FOBの移動を示すフラグの0/1は、逆の値と取ってもよい。また、RSSI値と閾値との比較の不等号において、≧は>、又は≦は<であってもよい。
【0054】
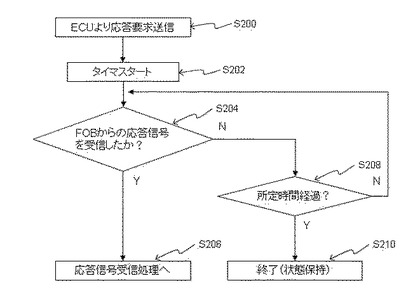
図4は、本実施例における、ECUにて、FOBからの応答信号が受信できなかった場合の処理を示すフローチャートである。ECUは、S200にて、S100と同様に応答要求信号を送信する。ECUは、その後、S202にて、タイマをスタートさせる。ECUは、S204にて、FOBからの応答信号を受信したか否かをチェックする。ECUは、FOBからの応答信号を受信した場合には、S206にて、応答信号受信処理(S116以降の処理)を行う。ECUは、FOBからの応答信号を受信していない場合、S208にて、S202でスタートしたタイマが所定時間経過したか否かをチェックする。ECUは、所定時間経過していなければ、S204のチェックを繰り返し、所定時間経過した場合には、S210にて、何もせずに終了、即ち、その時点での状態(ロック状態・アンロック状態)を維持する。こうすることにより、携帯機30Aが応答要求信号を受信できない位置にある場合などに、ECUは、1回の応答要求信号に対する携帯機30Aからの応答信号を待ち続けることがなくなる。
【0055】
<第三実施例>
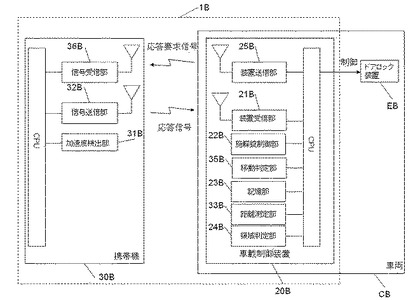
図5は、本発明に係る第三実施例における制御システム1Bを示すブロック図を示す。なお、以下では、上記実施例と異なる部分を中心に述べる。本実施例における、制御システム1Bの車載制御装置20Bは、携帯機30Bに応答要求信号を送信する装置送信部25Bと、携帯機30Bの信号送信部32Bから信号を受信する装置受信部21Bと、装置受信部21B受信した信号に基づき車両CBの施解錠を制御する施解錠制御部22Bと、車両CBと携帯機30Bの間の距離についての予め定めた距離閾値及び携帯機30Bに与えられる加速度についての予め定めた加速度閾値を記憶する記憶部23Bと、車両CBと携帯機30Bの距離を測定する距離測定部33Bと、携帯機30Bが移動しているか否かを判定する移動判定部35Bと、携帯機30Bは所定領域内に在るか否かを判定する領域判定部24Bと、を備える。
【0056】
制御システム1Bの携帯機30Bは、車載制御装置20Bの装置送信部25Bが送信する応答要求信号を受信する信号受信部36Bと、自身に与えられる加速度を検出する加速度検出部31Bと、加速度検出部31Bが検出した加速度の情報を含む信号を車載制御装置20Bに送信する信号送信部32Bと、を備える。
【0057】
これにより、制御システム1Bは、所謂パッシブエントリシステムを構成し、携帯機に必要最小限の機能を備える携帯機30Bを所持する使用者が携帯機30Bの操作を行わない場合でも、車載制御装置20Bは、携帯機30Bから情報を得ることができる。
【0058】
装置送信部25Bは、所定の信号強度で、携帯機30Bに応答要求信号を送信する。その応答要求信号を信号受信部36Bで受信した携帯機30Bは、使用者の携帯機30Bに対する操作の有無に関係なく、信号送信部32Bから応答信号を車載制御装置20Aに送信する。その応答信号は、加速度検出部31Aが検出した加速度の情報を含む。本実施例では、距離測定部は車載制御装置側に備えられるので、応答信号は、車両CBと携帯機30Bの間の距離の情報を含まない。
【0059】
加速度の情報は、加速度検出部31Bが検出した加速度の値そのものであってもよいし、加速度の値を加工したものであってもよい。加速度は、加速度検出部31Bによって、信号受信部36Bが応答要求信号を受信した時又は受信直後から応答信号を送信するまでの所定の時間に計測された値である。その所定の時間に計測された加速度の値は、平均値、最大値、中央値などが計算され、適宜選択される。
【0060】
車載制御装置20Bの距離測定部33Bは、装置受信部21Bが携帯機30Bから受信した応答信号の信号強度に基づき車両CBと携帯機30Bの距離を測定する。具体的には、距離測定部33Bは、信号送信部32Bが所定の信号強度で送信した応答信号の、装置受信部21Bが受信した信号強度(RSSI値)を計測する。
【0061】
車載制御装置20Bの領域判定部24Bは、距離測定部33Bが計測した信号強度(RSSI値)と、記憶部23Bが記憶する車両CBと携帯機30Bの間の距離についての予め定めた距離閾値(RSSI値)とに基づき、携帯機30Bが車両CBから所定領域内に在るか否かを判定する。
【0062】
移動判定部35Bは、記憶部23Bが記憶する加速度閾値と、携帯機30Bからの応答信号に含まれる加速度の情報とを比較し、応答信号に含まれる加速度が加速度閾値以上の場合には、携帯機30Bは移動していると判定する。逆に、移動判定部35Bは、加速度閾値と応答信号に含まれる加速度とを比較し、応答信号に含まれる加速度が加速度閾値未満の場合には、携帯機30Bは移動していないと判定する。
【0063】
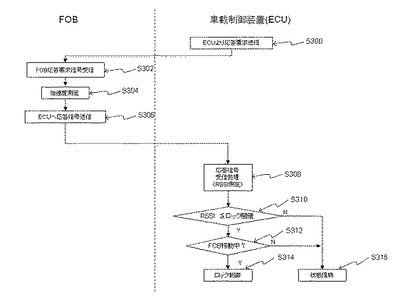
図6は、本実施例において、車両がアンロック状態の時に、移動判定と領域判定に基づき施解錠を行う制御システム1Bのフローチャートを示す。車載制御装置(ECU)は、S300にて、定期的に所定の間隔で応答要求信号を送信する。その応答要求信号を受信する位置に存在したFOBは、S302にて応答要求信号を受信する。FOBは、S304にて、ECUからの応答要求信号を受信中又は受信後の加速度を測定する。
【0064】
FOBは、S306にて、S302にて受信した応答要求信号に対して返信するために、測定したRSSI値を含む応答信号をECUに送信する。ECUは、S308にて、FOBからの応答信号を受信し、RSSI値を測定する。
【0065】
ECUは、S310にて、FOBの応答信号のRSSI値と記憶部23Bに記憶されたロックすべき距離閾値(ロック閾値)を比較し、RSSI値がロック閾値以下であった場合、さらにS312にて、FOBの応答信号に含まれていた加速度の情報に基づきFOBが移動中と判定された場合、S314にて、ドアの施錠(ロック)を行う。
【0066】
ECUは、S310にて、FOBの応答信号のRSSI値とロック閾値を比較し、RSSI値がロック閾値を超える値であった場合、または、S312にて、加速度の情報に基づきFOBが移動していないと判定された場合、S316にて、ドアの状態を保持、即ち解錠状態(アンロック状態)を維持する。なお、S310とS312の判断はどちらを先に行ってもよい。
【0067】
なお、本発明は、例示した実施例に限定するものではなく、特許請求の範囲の各項に記載された内容から逸脱しない範囲の構成による実施が可能である。
【符号の説明】
【0068】
1 制御システム
20 車載制御装置
30 携帯機
21 装置受信部
22 施解錠制御部
23 記憶部
24 領域判定部
25 装置送信部
31 加速度検出部
32 信号送信部
33 距離測定部
34 記憶部
35 移動判定部
36 信号受信部
C 車両(対象物)
【技術分野】
【0001】
本発明は、車両等を施錠又は解錠するための制御システム、制御方法及び電波送受体に関し、特に、距離情報と加速度情報を用いて施錠又は解錠するための制御システム、制御方法及び電波送受体に関する。
【背景技術】
【0002】
従来から、使用者が携帯可能な携帯機と車両や住宅等に設けられた制御装置との間で行われる無線通信により、車両や住宅等のドアの施錠や解錠を自動的に行うエントリーシステムが広く実用化されている。これは、固有の識別情報を有する携帯機が、対応する制御装置との間で行われる無線通信を通じてその制御装置に認証され、その制御装置が車両や住宅等のドアの施錠動作と解錠動作を実現するものである。
【0003】
即ち、携帯機を携帯した使用者が車両や住宅等に近づくことにより、制御装置との通信可能領域に入り、無線通信が成立して、その携帯機が認証されると、施錠状態にあるドアが自動的に解錠される。逆に、携帯機を携帯した使用者が車両や住宅等から離れることにより、制御装置との通信可能領域から出て、無線通信が成立しなくなると、解錠状態にあるドアが自動的に施錠される。
【0004】
例えば、特許文献1では、車両のスマートエントリーシステムにおいて、ユーザが車両から離れると自動的にドアを施錠するオートロック機能を、使い勝手良くかつ低コストに実現することを目的として、以下のドアロック制御装置が開示されている。即ち、このドアロック制御装置は、携帯機と車載機間でLF−UHF相互通信を行う構成とし、オートロック距離を遠距離又は近距離にユーザが指定可能なオートロック距離スイッチを備える。このスイッチにより近距離が指定されている場合には、車載機から携帯機へのLF通信が成立しなくなったことに基づいてオートロック機能を実行し、遠距離が指定されている場合には、携帯機から車載機へのUHF通信が成立しなくなったことに基づいてオートロック機能を実行するものである。
【0005】
また、特許文献2では、通信装置が携帯機を不必要に認証してしまうことを防止することを目的として、以下の通信システムが開示されている。即ち、この通信システムでは、携帯機は、携帯機が電子制御装置の通信領域に進入し携帯機が電子制御装置から送信される応答要求信号を受信した場合に、この応答要求信号に対する応答として応答信号を送信する。また、電子制御装置は、携帯機が応答要求信号を受信するよりも前の所定期間の間に携帯機の加速度センサが携帯機に付与される加速度を検出した場合に、応答信号に基づいて携帯機を認証する。従って、この通信システムは、応答要求信号を受信するよりも前の所定期間の間に携帯機が移動していた場合に、その携帯機を認証する通信システムである。
【0006】
しかし、特許文献1に開示された従来技術では、車載機等から携帯機への無線通信が成立しなくなったことに基づいてオートロック機能を実行するので、周囲環境の影響による車載機等から出力される信号の受信強度のバラツキや、車載機等の出力回路による信号のバラツキにより、車載機等を備えた車両等と携帯機との実際の通信可能領域がり変化してしまう。その結果、携帯機を携帯する使用者が、通信可能領域の境界付近で立ち止まっていたりすると、施解錠を制御する車載機等の制御装置は、施錠動作と解錠動作を交互に繰り返してしまう。
【0007】
また、特許文献2に開示された従来技術では、携帯機の加速度を検出して、携帯機から車載機等への信号の送信可否を決めているので、携帯機を携帯する使用者が立ち止まっていたりすると、加速度を検出できないので同様の問題が生じ、使用者は、意図しない施錠動作と解錠動作の繰り返しにより煩わしさを感じる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2003−269023号公報
【特許文献2】特開2010−24746号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
そこで、本発明の目的とするところは、携帯機(電波送受体)が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作を防止し、施解錠を制御する制御システム、制御方法、及び電波送受体を提供することである。
【課題を解決するための手段】
【0010】
上記課題を解決するために、電波送受体と、その電波送受体と通信し、特定の対象物の施解錠を制御する制御装置と、を有する制御システムであって、その電波送受体は、自身に与えられる加速度を検出する加速度検出部と、その加速度検出部が検出した加速度の情報を含む信号を送信する信号送信部と、を備え、その制御装置は、その電波送受体のその信号送信部から信号を受信する装置受信部と、その装置受信部が受信した信号に基づき、その対象物の施解錠を制御する施解錠制御部と、を備え、その電波送受体とその制御装置のいずれか一方又は両方は、その対象物とその電波送受体の距離を測定する距離測定部を備え、その施解錠制御部は、その距離測定部が測定した距離と加速度の情報を基に、その対象物の施解錠を制御する制御システムが提供される。
これによれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御システムを提供できる。
【0011】
さらに、その電波送受体とその制御装置のいずれか一方又は両方は、その対象物とその電波送受体の間の距離についての予め定めた距離閾値及び/又はその電波送受体に与えられる加速度についての予め定めた加速度閾値と、を記憶する記憶部と、その距離閾値とその距離測定部が測定した距離とを比較し、その距離測定部が測定した距離が距離閾値以下の場合には、その電波送受体は所定領域内に在ると判定する領域判定部と、加速度閾値とその加速度検出部が検出した加速度とを比較し、その加速度検出部が検出した加速度がその加速度閾値以上の場合には、その電波送受体は移動していると判定する移動判定部と、を備え、その領域判定部がその電波送受体はその所定領域内に在ると判定し、かつ、その移動判定部がその電波送受体は移動していると判定した場合、その施解錠制御部はその対象物を解錠し、その領域判定部がその電波送受体はその所定領域内に在ると判定せず、かつ、その移動判定部がその電波送受体は移動していると判定した場合、その施解錠制御部はその対象物を施錠し、その移動判定部がその電波送受体は移動していると判定しない場合、その施解錠制御部はその対象物の施錠状態又は解錠状態を維持する、ことを特徴としてもよい。
これによれば、施解錠の誤動作を確実に防止することができる。
【0012】
さらに、その記憶部は、距離閾値として予め定めた施錠距離閾値と解錠距離閾値とを記憶しており、その領域判定部は、その施錠距離閾値とその距離測定部が測定した距離とを比較し、その距離測定部が測定した距離がその施錠距離閾値以上の場合には、その電波送受体は施錠領域内に在ると判定し、その解錠距離閾値とその距離測定部が測定した距離とを比較し、その距離測定部が測定した距離がその施錠距離閾値以下の場合には、その電波送受体は解錠領域内に在ると判定し、その領域判定部がその電波送受体はその解錠領域内に在ると判定し、かつ、その移動判定部がその電波送受体は移動していると判定した場合、その施解錠制御部はその対象物を解錠し、その領域判定部がその電波送受体はその施錠領域内に在ると判定し、かつ、その移動判定部がその電波送受体は移動していると判定した場合、その施解錠制御部はその対象物を施錠する、ことを特徴としてもよい。
これによれば、施錠領域と解錠領域を別々に設定でき、柔軟な所定領域の設定が行えることにより、施解錠の誤動作を回避できる。
【0013】
さらに、その施錠距離閾値は、その解錠距離閾値より大であることを特徴としてもよい。
これによれば、施錠領域と解錠領域いずれにも属さない領域を作ることにより、領域でも施錠状態又は解錠状態を維持する領域を形成できる。
【0014】
さらに、その対象物は車両であり、その制御装置はその車両に備えられた車載制御装置であり、その電波送受体はその車載制御装置と通信する携帯機であることを特徴としてもよい。
これによれば、車両の制御システムにおいて、施解錠の誤動作を防止できる。
【0015】
さらに、その車載制御装置は、その携帯機に応答要求信号を送信する装置送信部をさらに備え、その携帯機は、その装置送信部が送信する応答要求信号を受信する信号受信部をさらに備え、その距離測定部と、その加速度閾値を記憶するその記憶部と、その移動判定部は、その携帯機に備えられ、その距離閾値を記憶するその記憶部とその領域判定部は、その車載制御装置に備えられ、その携帯機のその距離測定部は、その信号受信部が受信したその応答要求信号の信号強度を測定し、その携帯機のその信号送信部は、測定されたその信号強度の情報をさらに含むその信号を送信し、その車載制御装置のその装置受信部は、その信号を受信し、その車載制御装置のその領域判定部は、受信したその信号に含まれるその信号強度の情報に基づき、その携帯機がその車両からその所定領域内に在ると判定することを特徴としてもよい。
これによれば、所謂パッシブエントリシステムにおいても、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御システムを提供できる。
【0016】
別の観点によれば、上記課題を解決するために、上記の制御システムに使用される制御装置が提供される。
これによれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御システムにおける制御装置を提供することができる。
【0017】
別の観点によれば、上記課題を解決するために、特定の対象物の施解錠を制御する制御装置と、その対象物の施解錠を制御するために無線通信を行う電波送受体であって、その電波送受体は、自身に与えられる加速度を検出する加速度検出部と、その対象物との距離を測定する距離測定部と、その加速度検出部が検出した加速度の情報とその距離測定部が測定した距離の情報を基にその対象物の施解錠を制御する制御信号を生成する施解錠信号生成部と、その施解錠信号生成部が生成するその制御信号を含む信号を送信する信号送信部と、を備え、その施解錠信号生成部が生成したその制御信号に基づき、その制御装置のその施解錠実行部にその対象物の施解錠を実行させる電波送受体が提供される。
これによれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない電波送受体を提供することができる。
【0018】
別の観点によれば、上記課題を解決するために、電波送受体と制御装置が無線通信手段を介して通信し、特定の対象物の施解錠を制御する制御方法であって、その対象物とその電波送受体の距離を測定し、その電波送受体が、自身に与えられる加速度を検出すると共に、該加速度の情報をその制御装置に送信し、その制御装置が、送信されたその加速度の情報を受信し、受信したその加速度の情報を基に、その加速度が予め定めた加速度閾値以上であることによりその電波送受体が移動していると判定し、測定したその距離を基に、その距離が予め定めた距離閾値以下であることによりその電波送受体が所定領域内に在ると判定し、その電波送受体がその所定領域内に在ると判定し、かつ、その電波送受体が移動していると判定した場合、その対象物を解錠し、その電波送受体がその所定領域内に在ると判定せず、かつ、その電波送受体が移動していると判定した場合、その対象物を施錠し、その電波送受体が移動していると判定しない場合、その対象物の施錠状態又は解錠状態を維持する、制御方法が提供される。
これによれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御方法を提供することができる。
【発明の効果】
【0019】
以上説明したように、本発明によれば、電波送受体が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作を防止し、施解錠を制御する制御システム、制御方法、及び電波送受体を提供することができる。
【図面の簡単な説明】
【0020】
【図1】本発明に係る第一実施例のブロック図。
【図2】本発明に係る第二実施例のブロック図。
【図3】本発明に係る第二実施例のフローチャート(その一)。
【図4】本発明に係る第二実施例のフローチャート(その二)。
【図5】本発明に係る第三実施例のブロック図。
【図6】本発明に係る第三実施例のフローチャート。
【発明を実施するための形態】
【0021】
以下では、図面を参照しながら、本発明に係る各実施例について説明する。
<第一実施例>
図1は、本発明に係る第一実施例における制御システム1を示すブロック図である。制御システム1は、電波送受体である携帯機30(別名をFOBとも言う)と、特定の対象物である車両Cに備えられ、携帯機30と通信し、車両Cの施解錠を制御する車載制御装置20とを有する。なお、特定の対象物は、車両に限定されるものはなく、施解錠の対象となる車両等の移動体や倉庫等の施設を含むものである。
【0022】
車載制御装置20は、車両Cに設けられた様々な機器を制御するために設けられ、本実施例では、ドアロック装置Eを制御する制御装置である。車載制御装置は、施解錠の対象物と同じ位置にあってもよいし、異なる位置にあってもよい。従って、本実施例では、車載制御装置20は車両Cに備えられているので対象物と同じ位置にあるが、これに限定されず、車載制御装置は車両Cに備えられず、別の場所、例えば、クラウドコンピューティング上にあってもよい。
【0023】
携帯機30は、車両Cの操作を行うために、車両Cの使用者により保持されるものであり、本実施例においては、ドアの施錠・解錠ができる携帯機である。携帯機30は、自身に与えられる加速度を検出する加速度検出部31と、車両Cと携帯機30の距離を測定する距離測定部33と、加速度検出部31が検出した加速度の情報と距離測定部33が測定した距離の情報を含む信号を車載制御装置20に送信する信号送信部32と、を備える。なお、携帯機30は、さらに、携帯機30のこれらの構成要素を制御するCPUを備える。
【0024】
加速度検出部31は、携帯機30自身に与えられる加速度を検出する加速度センサであり、加速度を計測できる機器であれば、機械式、光学式、半導体式等いずれの方式であってもよく、特に限定されない。好ましくは、MEMS(Micro Electro Mechanical Systems)技術を使用し、多軸を検出できる1チップの半導体式の加速度センサである。
【0025】
信号送信部32は、加速度検出部31が検出した加速度の情報を含む信号を車載制御装置20に送信する。具体的には、携帯機30の使用者が車両Cのドアロック装置Eを施錠又は解錠するために携帯機30を操作した際、携帯機30は、車載制御装置20に対して施解錠の制御信号と共に加速度の情報を送信する。使用される帯域は、一般的には、携帯機30から車載制御装置20へはRF帯であるが、これに限定されない。加速度の情報とは、加速度検出部31が検出した加速度の値そのものであってもよいし、加速度の値を加工したものであってもよい。具体的には、加速度の情報は、加速度検出部31によって、使用者が携帯機30を操作した時から所定の時間に計測された値の平均値、最大値、中央値等が計算され、適宜選択される。
【0026】
距離測定部33は、車両Cと携帯機30の距離を測定する。距離の測定方法は、特に限定されないが、例えば、携帯機30がさらに距離センサを備え、車両Cまでの距離を測定してもよい。この場合、携帯機30は、測定した車両Cまでの距離を、信号送信部32から加速度の情報等と共に送信することが好適である。距離測定部33は、車両C上に備えられてもよく、また、携帯機30及び車両C上の両方に備えられてもよい。例えば、前者では、車両Cが携帯機30からの無線信号の強度を計測することにより両者の距離を測定してもよい。また、後者では、携帯機30と車両CがさらにGPSセンサ(Global Positioning System)を備え、両者の位置の相違から両者の距離を算出してもよい。
【0027】
車載制御装置20は、携帯機30の信号送信部32から信号を受信する装置受信部21と、装置受信部21が受信した信号に基づき車両Cの施解錠を制御する施解錠制御部22と、携帯機30に与えられる加速度についての予め定めた加速度閾値及び車両Cと携帯機30の間の距離についての予め定めた距離閾値を記憶する記憶部23と、携帯機30は所定領域内に在るか否かを判定する領域判定部24と、携帯機30が移動しているか否かを判定する移動判定部35と、を備える。なお、車載制御装置20は、さらに、車載制御装置20のこれらの構成要素を制御するCPUを備える。
【0028】
装置受信部21は、携帯機30の信号送信部32からの信号を、アンテナで受信し、復号する。
【0029】
記憶部23は、典型的にはメモリから構成され、車両Cと携帯機30の間の距離についての予め定めた距離閾値を記憶する。距離閾値は、携帯機30を保持した使用者が車両Cからどのくらい離れた場合に車両Cのドアを施錠又は解錠するのかを決定するための閾値として適宜定められる。閾値が小さすぎると使用者が車両Cに近づいているのにドアを解錠しない、逆に、閾値が大きすぎると使用者が車両Cから遠ざかっているのに施錠しないようなこととなり、使用者に不便を与えるので、車両Cの出荷時、メンテナンス時などに適宜適切な閾値が設定され、記憶される。
【0030】
記憶部23は、さらに、携帯機30に与えられる加速度についての予め定めた加速度閾値を記憶する。加速度閾値は、携帯機30の使用者が携帯機30を保持しながら移動しているか否かを判断するための閾値として適宜定められる。閾値が小さすぎると移動していないのに移動していると、逆に、閾値が大きすぎると移動しているのに移動していないと、誤って判定されてしまうので、車両Cの出荷時、メンテナンス時などに、明らかに使用者が移動していると推定できる程度の適切な閾値が設定され、記憶される。
【0031】
ここで、保持しながら移動しているか否かの判断について、より具体的に説明する。
使用者の携帯機30の保持の仕方は、様々である。例えば、携帯機30を手に持って保持する、ポケットに入れた状態で保持する、鞄に入れた状態で保持する、などである。また、携帯機30を保持した使用者は、併せて様々な動きをする。例えば、歩く、走る、給油等のために立ち止まる、軽作業する、屈伸運動などの軽い運動をする、などである。上記例の中では、移動に該当するのは「歩く」と「走る」であり、歩いている状態の加速度と走っている状態の加速度は、その場で立ち止まった状態、軽作業をしている状態、軽い運動をしている状態の加速度に比べると、大きく、かつ、横方向(水平方向)の加速度が生ずることが多い。従って、例えば、三軸の加速度センサを用いると、使用者がその場で上下動作(屈伸動作)をしているのか、歩いているのかを判断することができ、歩いている場合だけ施解錠を行うことが可能となる。このようにして、使用者の行動に伴って、使用者が車両に期待する施解錠動作と実際の車両の施解錠動作とが異なるという誤動作を防止することができる。
【0032】
移動判定部35は、記憶部23が記憶する加速度閾値と携帯機30の加速度検出部31が検出し、装置受信部21を経て得た加速度とを比較し、加速度検出部31が検出した加速度が加速度閾値以上の場合には、携帯機30は移動していると判定する。逆に、移動判定部35は、加速度閾値と検出した加速度とを比較し、検出加速度が加速度閾値未満の場合には、携帯機30は移動していないと判定する。
【0033】
領域判定部24は、記憶部23が記憶する距離閾値と携帯機30の距離測定部33が測定し、装置受信部21を経て得た距離とを比較し、距離測定部33が測定した距離が距離閾値以下の場合には、携帯機30は所定領域内に在ると判定する。逆に、領域判定部24は、距離閾値と測定した距離とを比較し、測定した距離が距離閾値を超える場合には、携帯機30は所定領域外に在ると判定する。なお、領域判定部24は、本実施例では車載制御装置20に備えられるが、これに限定されず、携帯機30に備えられてもよく、好適には、距離閾値を記憶する記憶部23が備えられる機器上に備えられるとよい。
【0034】
施解錠制御部22は、携帯機30の距離測定部33が測定した距離と加速度検出部31が検出した加速度の情報を基に、車両Cの施解錠を制御する。より具体的には、施解錠制御部22は、領域判定部24が携帯機30は所定領域内に在ると判定し、かつ、移動判定部35が携帯機30は移動していると判定した場合、車両Cを解錠する。また、施解錠制御部22は、領域判定部24が携帯機30は所定領域内に在ると判定せず、かつ、移動判定部35が携帯機30は移動していると判定した場合、車両Cを施錠する。また、施解錠制御部22は、移動判定部35が携帯機30は移動していると判定しない場合、車両Cの施錠状態又は解錠状態を維持する。これによれば、携帯機30が通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作を確実に防止することができる。
【0035】
別の観点から見れば、これは、携帯機30と車載制御装置20が無線通信手段を介して通信し、特定の対象物である車両Cの施解錠を制御する制御方法である。具体的には、この制御方法は以下のようである。携帯機30が、車両Cと携帯機30の距離を測定し、自身に与えられる加速度を検出すると共に、その加速度と距離の情報を車載制御装置20に送信する。そして、車載制御装置20Aが、送信された加速度と距離の情報を受信し、受信した加速度の情報を基に、その加速度が予め定めた加速度閾値以上であることにより携帯機30が移動していると判定し、受信した距離の情報を基に、その距離が予め定めた距離閾値以下であることにより携帯機30が所定領域内に在ると判定する。携帯機30が所定領域内に在ると判定し、かつ、携帯機30が移動していると判定した場合、車両Cを解錠する。携帯機30が所定領域内に在ると判定せず、かつ、携帯機30が移動していると判定した場合、その対象物を施錠し、携帯機30が移動していると判定しない場合、車両Cの施錠状態又は解錠状態を維持する。
【0036】
さらに、記憶部23は、距離閾値について、予め定めた施錠距離閾値と解錠距離閾値の2つの距離閾値を有し、領域判定部24は、施錠距離閾値と携帯機30の距離測定部33が測定した距離とを比較し、距離測定部33が測定した距離が施錠距離閾値以上の場合には、携帯機30は施錠領域内に在ると判定してもよい。また、領域判定部24は、解錠距離閾値と距離測定部33が測定した距離とを比較し、距離測定部33が測定した距離が施錠距離閾値以下の場合には、携帯機30は解錠領域内に在ると判定してもよい。
【0037】
そして、施解錠制御部22は、領域判定部24が携帯機30は解錠領域内に在ると判定し、かつ、移動判定部35が携帯機30は移動していると判定した場合、車両C、即ちドアロック装置Eを解錠してもよい。また、施解錠制御部22は、領域判定部24が携帯機30は施錠領域内に在ると判定し、かつ、移動判定部35が携帯機30は移動していると判定した場合、ドアロック装置Eを施錠してもよい。こうすることにより、施錠領域と解錠領域を別々に設定でき、柔軟な所定領域の設定が行えることにより、施解錠の誤動作を回避できる。
【0038】
さらに、上記の施錠距離閾値は、解錠距離閾値より大であってもよい。こうすることにより、施錠領域と解錠領域いずれにも属さない領域を作ることにより、領域でも施錠状態又は解錠状態を維持する領域を形成でき、誤動作を起こすことをより防止することができる。
【0039】
<第二実施例>
図2は、本発明に係る第二実施例における制御システム1Aを示すブロック図を示す。なお、以下では、第一実施例と異なる部分を中心に述べる。
制御システム1Aの車載制御装置20Aは、携帯機30Aに応答要求信号を送信する装置送信部25Aと、携帯機30Aの信号送信部32Aから信号を受信する装置受信部21Aと、装置受信部21Aが受信した信号に基づき車両CAの施解錠を制御する施解錠制御部22Aと、車両CAと携帯機30Aの間の距離についての予め定めた距離閾値を記憶する記憶部23Aと、携帯機30Aは所定領域内に在るか否かを判定する領域判定部24Aと、を備える。
【0040】
制御システム1Aの携帯機30Aは、車載制御装置20Aの装置送信部25Aが送信する応答要求信号を受信する信号受信部36Aと、自身に与えられる加速度を検出する加速度検出部31Aと、加速度検出部31Aが検出した加速度の情報を含む信号を車載制御装置20Aに送信する信号送信部32Aと、車両CAと携帯機30Aの距離を測定する距離測定部33Aと、携帯機30Aに与えられる加速度についての予め定めた加速度閾値を記憶する記憶部34Aと、携帯機30Aが移動しているか否かを判定する移動判定部35Aと、を備える。
【0041】
これにより、制御システム1Aは、所謂パッシブエントリシステムを構成し、携帯機30Aを所持する使用者が携帯機30Aの操作を行わない場合でも、車載制御装置20Aは、携帯機30Aから情報を得ることができる。
【0042】
装置送信部25Aは、所定の信号強度で、定期的に所定の間隔で、携帯機30Aに応答要求信号を送信する。信号受信部36Aは、その応答要求信号を受信する。応答要求信号を信号受信部36Aで受信した携帯機30Aは、使用者の携帯機30Aに対する操作の有無に関係なく、信号送信部32Aから応答信号を車載制御装置20Aに送信する。その応答信号は、加速度検出部31Aが検出した加速度の情報と、距離測定部33Aが測定した車両CAと携帯機30Aの距離の情報とを含む。
【0043】
移動判定部35Aは、記憶部34Aが記憶する加速度閾値と携帯機30の加速度検出部31Aが検出し、装置受信部21Aを経て得た加速度とを比較し、加速度検出部31Aが検出した加速度が加速度閾値以上の場合には、携帯機30Aは移動していると判定する。逆に、移動判定部35Aは、加速度閾値と検出した加速度とを比較し、検出加速度が加速度閾値未満の場合には、携帯機30Aは移動していないと判定する。この判定結果は、加速度の情報として、信号送信部32Aにより車載制御装置20Aに送信される。
【0044】
本実施例では、加速度の情報は、送信する情報の量を低減できるので、信号送信部32Aは、移動判定部35Aが判定を行った結果を示す情報を送信する。しかし、これに限定されず、携帯機30Aと車載制御装置20Aの両方が移動判定部35Aを備えて、処理を分担してもよく、加速度検出部31Aが検出した加速度の値そのものであってもよいし、加速度の値を加工したものであってもよい。加速度は、加速度検出部31Aによって、信号受信部36Aが応答要求信号を受信した時又は受信直後から応答信号を送信するまでの所定の時間に計測された値である。その所定の時間に計測された加速度の値は、平均値、最大値、中央値などが計算され、適宜選択される。
【0045】
また、距離測定部33Aが測定した車両CAと携帯機30Aの距離の情報は、信号受信部36Aが受信した応答要求信号の信号強度から得られる。具体的には、距離測定部33Aは、装置送信部25Aが所定の信号強度で送信した応答要求信号の、信号受信部36Aが受信した信号強度(RSSI:Receive Signal Strength Indication)を計測する。
【0046】
携帯機30Aの信号送信部32Aは、判定結果の加速度の情報と距離の情報(信号強度)を含む応答信号を車載制御装置20Aへ送信する。車載制御装置20Aの装置受信部21Aは、その応答信号を受信する。車載制御装置20Aの領域判定部24Aは、受信した応答信号に含まれる距離情報(信号強度)の情報と、記憶部23Aが記憶する車両CAと携帯機30Aの間の距離についての予め定めた距離閾値(RSSI値)とに基づき、携帯機30Aが車両CAから所定領域内に在るか否かを判定する。
【0047】
図3は、本実施例における移動判定と領域判定に基づき施解錠を行う制御システム1Aのフローチャートを示す。なお、フローチャートにおいて、「S」は各処理のステップを示すものとする。車載制御装置(ECU)は、S100にて、定期的に所定の間隔で応答要求信号を送信する。その応答要求信号を受信する位置に存在したFOBは、S102にて応答要求信号を受信し、S104にて受信処理即ちRSSI値を測定する。さらに、FOBは、S106にて、ECUからの応答要求信号を受信中又は受信後の加速度を測定する。具体的には、FOB(加速度検出部31A)は、応答要求信号の受信中に自身が受けた加速度、又は受信後の数ミリ秒間に自身が受けた加速度を測定し、その時間の間に受けた加速度の平均値等を算出する。
【0048】
FOBは、S108にて、S106にて測定された加速度と記憶部34Aに記憶された予め定めた加速度閾値とを比較することにより、判定する。FOBは、S110にて、測定された加速度が加速度閾値以上の場合即ちFOBが移動していると判定された場合は、FOBが移動していることを示すフラグ(bit)を1にセットする。FOBは、S112にて、測定された加速度が加速度閾値未満の場合即ちFOBが移動していないと判定された場合は、FOBが移動していないことを示すフラグ(bit)を0にセットする。FOBは、S114にて、S102にて受信した応答要求信号に対して返信するために、ECUに応答信号を送信する。この応答信号は、測定したRSSI値とFOBの移動状態を示すフラグを含む。
【0049】
ECUは、S116にて、FOBからの応答信号を受信する。ECUは、S118にて、現在のドアの施錠・解錠状態(ロック・アンロック状態)を検出する。アンロック状態であった場合、ECUは、S120にて、FOBの応答信号に含まれていたRSSI値と記憶部23Aに記憶されたロックすべき距離閾値(ロック閾値)を比較し、RSSI値がロック閾値以下であった場合、さらにS122にて、FOBの応答信号に含まれていたフラグがFOBが移動中であることを示す場合、S124にて、ドアの施錠(ロック)を行う。
【0050】
ECUは、S120にて、FOBの応答信号に含まれていたRSSI値とロック閾値を比較し、RSSI値がロック閾値を超える値であった場合、または、S122にて、フラグがFOBが移動していないことを示す場合、S126にて、ドアの状態を保持、即ち解錠状態(アンロック状態)を維持する。なお、S120とS122の判断はどちらを先に行ってもよい。
【0051】
ECUは、S118にて現在のドアのロック・アンロック状態を検出し、ロック状態であった場合、S128にて、FOBの応答信号に含まれていたRSSI値と記憶部23Aに記憶されたアンロックすべき距離閾値(アンロック閾値)を比較する。ECUは、RSSI値がアンロック閾値以上であった場合、さらにS130にて、FOBの応答信号に含まれていたフラグがFOBが移動中であることを示す場合、S132にて、ドアの解錠(アンロック)を行う。
【0052】
ECUは、S128にて、FOBの応答信号に含まれていたRSSI値とアンロック閾値を比較し、RSSI値がアンロック閾値未満の値であった場合、または、S130にて、フラグがFOBが移動していないことを示す場合、S134にて、ドアの状態を保持、即ち施錠状態(ロック状態)を維持する。なお、S128とS130の判断はどちらを先に行ってもよい。これによれば、所謂パッシブエントリシステムにおいても、携帯機30Aが通信可能領域の境界付近で留まっている場合でも、不要な施解錠を交互に繰り返えす誤動作をしない制御システム1Aを提供できる。
【0053】
なお、本フローチャートにおいて、ロック閾値(施錠距離閾値)は、アンロック閾値(解錠距離閾値)と同じ値であっても、ロック閾値がアンロック閾値より大きい値であってもよい。また、FOBの移動を示すフラグの0/1は、逆の値と取ってもよい。また、RSSI値と閾値との比較の不等号において、≧は>、又は≦は<であってもよい。
【0054】
図4は、本実施例における、ECUにて、FOBからの応答信号が受信できなかった場合の処理を示すフローチャートである。ECUは、S200にて、S100と同様に応答要求信号を送信する。ECUは、その後、S202にて、タイマをスタートさせる。ECUは、S204にて、FOBからの応答信号を受信したか否かをチェックする。ECUは、FOBからの応答信号を受信した場合には、S206にて、応答信号受信処理(S116以降の処理)を行う。ECUは、FOBからの応答信号を受信していない場合、S208にて、S202でスタートしたタイマが所定時間経過したか否かをチェックする。ECUは、所定時間経過していなければ、S204のチェックを繰り返し、所定時間経過した場合には、S210にて、何もせずに終了、即ち、その時点での状態(ロック状態・アンロック状態)を維持する。こうすることにより、携帯機30Aが応答要求信号を受信できない位置にある場合などに、ECUは、1回の応答要求信号に対する携帯機30Aからの応答信号を待ち続けることがなくなる。
【0055】
<第三実施例>
図5は、本発明に係る第三実施例における制御システム1Bを示すブロック図を示す。なお、以下では、上記実施例と異なる部分を中心に述べる。本実施例における、制御システム1Bの車載制御装置20Bは、携帯機30Bに応答要求信号を送信する装置送信部25Bと、携帯機30Bの信号送信部32Bから信号を受信する装置受信部21Bと、装置受信部21B受信した信号に基づき車両CBの施解錠を制御する施解錠制御部22Bと、車両CBと携帯機30Bの間の距離についての予め定めた距離閾値及び携帯機30Bに与えられる加速度についての予め定めた加速度閾値を記憶する記憶部23Bと、車両CBと携帯機30Bの距離を測定する距離測定部33Bと、携帯機30Bが移動しているか否かを判定する移動判定部35Bと、携帯機30Bは所定領域内に在るか否かを判定する領域判定部24Bと、を備える。
【0056】
制御システム1Bの携帯機30Bは、車載制御装置20Bの装置送信部25Bが送信する応答要求信号を受信する信号受信部36Bと、自身に与えられる加速度を検出する加速度検出部31Bと、加速度検出部31Bが検出した加速度の情報を含む信号を車載制御装置20Bに送信する信号送信部32Bと、を備える。
【0057】
これにより、制御システム1Bは、所謂パッシブエントリシステムを構成し、携帯機に必要最小限の機能を備える携帯機30Bを所持する使用者が携帯機30Bの操作を行わない場合でも、車載制御装置20Bは、携帯機30Bから情報を得ることができる。
【0058】
装置送信部25Bは、所定の信号強度で、携帯機30Bに応答要求信号を送信する。その応答要求信号を信号受信部36Bで受信した携帯機30Bは、使用者の携帯機30Bに対する操作の有無に関係なく、信号送信部32Bから応答信号を車載制御装置20Aに送信する。その応答信号は、加速度検出部31Aが検出した加速度の情報を含む。本実施例では、距離測定部は車載制御装置側に備えられるので、応答信号は、車両CBと携帯機30Bの間の距離の情報を含まない。
【0059】
加速度の情報は、加速度検出部31Bが検出した加速度の値そのものであってもよいし、加速度の値を加工したものであってもよい。加速度は、加速度検出部31Bによって、信号受信部36Bが応答要求信号を受信した時又は受信直後から応答信号を送信するまでの所定の時間に計測された値である。その所定の時間に計測された加速度の値は、平均値、最大値、中央値などが計算され、適宜選択される。
【0060】
車載制御装置20Bの距離測定部33Bは、装置受信部21Bが携帯機30Bから受信した応答信号の信号強度に基づき車両CBと携帯機30Bの距離を測定する。具体的には、距離測定部33Bは、信号送信部32Bが所定の信号強度で送信した応答信号の、装置受信部21Bが受信した信号強度(RSSI値)を計測する。
【0061】
車載制御装置20Bの領域判定部24Bは、距離測定部33Bが計測した信号強度(RSSI値)と、記憶部23Bが記憶する車両CBと携帯機30Bの間の距離についての予め定めた距離閾値(RSSI値)とに基づき、携帯機30Bが車両CBから所定領域内に在るか否かを判定する。
【0062】
移動判定部35Bは、記憶部23Bが記憶する加速度閾値と、携帯機30Bからの応答信号に含まれる加速度の情報とを比較し、応答信号に含まれる加速度が加速度閾値以上の場合には、携帯機30Bは移動していると判定する。逆に、移動判定部35Bは、加速度閾値と応答信号に含まれる加速度とを比較し、応答信号に含まれる加速度が加速度閾値未満の場合には、携帯機30Bは移動していないと判定する。
【0063】
図6は、本実施例において、車両がアンロック状態の時に、移動判定と領域判定に基づき施解錠を行う制御システム1Bのフローチャートを示す。車載制御装置(ECU)は、S300にて、定期的に所定の間隔で応答要求信号を送信する。その応答要求信号を受信する位置に存在したFOBは、S302にて応答要求信号を受信する。FOBは、S304にて、ECUからの応答要求信号を受信中又は受信後の加速度を測定する。
【0064】
FOBは、S306にて、S302にて受信した応答要求信号に対して返信するために、測定したRSSI値を含む応答信号をECUに送信する。ECUは、S308にて、FOBからの応答信号を受信し、RSSI値を測定する。
【0065】
ECUは、S310にて、FOBの応答信号のRSSI値と記憶部23Bに記憶されたロックすべき距離閾値(ロック閾値)を比較し、RSSI値がロック閾値以下であった場合、さらにS312にて、FOBの応答信号に含まれていた加速度の情報に基づきFOBが移動中と判定された場合、S314にて、ドアの施錠(ロック)を行う。
【0066】
ECUは、S310にて、FOBの応答信号のRSSI値とロック閾値を比較し、RSSI値がロック閾値を超える値であった場合、または、S312にて、加速度の情報に基づきFOBが移動していないと判定された場合、S316にて、ドアの状態を保持、即ち解錠状態(アンロック状態)を維持する。なお、S310とS312の判断はどちらを先に行ってもよい。
【0067】
なお、本発明は、例示した実施例に限定するものではなく、特許請求の範囲の各項に記載された内容から逸脱しない範囲の構成による実施が可能である。
【符号の説明】
【0068】
1 制御システム
20 車載制御装置
30 携帯機
21 装置受信部
22 施解錠制御部
23 記憶部
24 領域判定部
25 装置送信部
31 加速度検出部
32 信号送信部
33 距離測定部
34 記憶部
35 移動判定部
36 信号受信部
C 車両(対象物)
【特許請求の範囲】
【請求項1】
電波送受体と、該電波送受体と通信し、特定の対象物の施解錠を制御する制御装置と、を有する制御システムであって、
前記電波送受体は、
自身に与えられる加速度を検出する加速度検出部と、
該加速度検出部が検出した加速度の情報を含む信号を送信する信号送信部と、
を備え、
前記制御装置は、
前記電波送受体の前記信号送信部から信号を受信する装置受信部と、
前記装置受信部が受信した前記信号に基づき、前記対象物の施解錠を制御する施解錠制御部と、
を備え、
前記電波送受体と前記制御装置のいずれか一方又は両方は、前記対象物と前記電波送受体の距離を測定する距離測定部を備え、
前記施解錠制御部は、前記距離測定部が測定した距離と前記加速度の情報を基に、前記対象物の施解錠を制御する制御システム。
【請求項2】
前記電波送受体と前記制御装置のいずれか一方又は両方は、
前記対象物と前記電波送受体の間の距離についての予め定めた距離閾値及び/又は前記電波送受体に与えられる加速度についての予め定めた加速度閾値と、を記憶する記憶部と、
前記距離閾値と前記距離測定部が測定した距離とを比較し、前記距離測定部が測定した距離が前記距離閾値以下の場合には、前記電波送受体は所定領域内に在ると判定する領域判定部と、
前記加速度閾値と前記加速度検出部が検出した加速度とを比較し、前記加速度検出部が検出した加速度が前記加速度閾値以上の場合には、前記電波送受体は移動していると判定する移動判定部と、
を備え、
前記領域判定部が前記電波送受体は前記所定領域内に在ると判定し、かつ、前記移動判定部が前記電波送受体は移動していると判定した場合、前記施解錠制御部は前記対象物を解錠し、
前記領域判定部が前記電波送受体は前記所定領域内に在ると判定せず、かつ、前記移動判定部が前記電波送受体は移動していると判定した場合、前記施解錠制御部は前記対象物を施錠し、
前記移動判定部が前記電波送受体は移動していると判定しない場合、前記施解錠制御部は前記対象物の施錠状態又は解錠状態を維持する、
ことを特徴とする請求項1に記載の制御システム。
【請求項3】
前記記憶部は、前記距離閾値として予め定めた施錠距離閾値と解錠距離閾値とを記憶しており、
前記領域判定部は、
前記施錠距離閾値と前記距離測定部が測定した距離とを比較し、前記距離測定部が測定した距離が前記施錠距離閾値以上の場合には、前記電波送受体は施錠領域内に在ると判定し、
前記解錠距離閾値と前記距離測定部が測定した距離とを比較し、前記距離測定部が測定した距離が前記施錠距離閾値以下の場合には、前記電波送受体は解錠領域内に在ると判定し、
前記領域判定部が前記電波送受体は前記解錠領域内に在ると判定し、かつ、前記移動判定部が前記電波送受体は移動していると判定した場合、前記施解錠制御部は前記対象物を解錠し、
前記領域判定部が前記電波送受体は前記施錠領域内に在ると判定し、かつ、前記移動判定部が前記電波送受体は移動していると判定した場合、前記施解錠制御部は前記対象物を施錠する、
ことを特徴とする請求項2に記載の制御システム。
【請求項4】
前記施錠距離閾値は、前記解錠距離閾値より大であることを特徴とする請求項3に記載の制御システム。
【請求項5】
前記対象物は車両であり、前記制御装置は前記車両に備えられた車載制御装置であり、前記電波送受体は前記車載制御装置と通信する携帯機であることを特徴とする請求項1乃至4いずれかに記載の制御システム。
【請求項6】
前記車載制御装置は、前記携帯機に応答要求信号を送信する装置送信部をさらに備え、
前記携帯機は、前記装置送信部が送信する応答要求信号を受信する信号受信部をさらに備え、
前記距離測定部と、前記加速度閾値を記憶する前記記憶部と、前記移動判定部は、前記携帯機に備えられ、
前記距離閾値を記憶する前記記憶部と前記領域判定部は、前記車載制御装置に備えられ、
前記携帯機の前記距離測定部は、前記信号受信部が受信した前記応答要求信号の信号強度を測定し、
前記携帯機の前記信号送信部は、測定された前記信号強度の情報をさらに含む前記信号を送信し、
前記車載制御装置の前記装置受信部は、前記信号を受信し、
前記車載制御装置の前記領域判定部は、受信した前記信号に含まれる前記信号強度の情報に基づき、前記携帯機が前記車両から前記所定領域内に在ると判定することを特徴とする請求項5に記載の制御システム。
【請求項7】
請求項1乃至6に記載の制御システムに使用される制御装置。
【請求項8】
特定の対象物の施解錠を制御する制御装置と、前記対象物の施解錠を制御するために無線通信を行う電波送受体であって、
前記電波送受体は、
自身に与えられる加速度を検出する加速度検出部と、
前記対象物との距離を測定する距離測定部と、
前記加速度検出部が検出した加速度の情報と前記距離測定部が測定した距離の情報を基に前記対象物の施解錠を制御する制御信号を生成する施解錠信号生成部と、
前記施解錠信号生成部が生成する前記制御信号を含む信号を送信する信号送信部と、
を備え、
前記施解錠信号生成部が生成した前記制御信号に基づき、前記制御装置の前記施解錠実行部に前記対象物の施解錠を実行させる電波送受体。
【請求項9】
電波送受体と制御装置が無線通信手段を介して通信し、特定の対象物の施解錠を制御する制御方法であって、
前記対象物と前記電波送受体の距離を測定し、
前記電波送受体が、自身に与えられる加速度を検出すると共に、該加速度の情報を前記制御装置に送信し、
前記制御装置が、送信された前記加速度の情報を受信し、
受信した前記加速度の情報を基に、前記加速度が予め定めた加速度閾値以上であることにより前記電波送受体が移動していると判定し、
測定した前記距離を基に、前記距離が予め定めた距離閾値以下であることにより前記電波送受体が所定領域内に在ると判定し、
前記電波送受体が前記所定領域内に在ると判定し、かつ、前記電波送受体が移動していると判定した場合、前記対象物を解錠し、
前記電波送受体が前記所定領域内に在ると判定せず、かつ、前記電波送受体が移動していると判定した場合、前記対象物を施錠し、
前記電波送受体が移動していると判定しない場合、前記対象物の施錠状態又は解錠状態を維持する、
制御方法。
【請求項1】
電波送受体と、該電波送受体と通信し、特定の対象物の施解錠を制御する制御装置と、を有する制御システムであって、
前記電波送受体は、
自身に与えられる加速度を検出する加速度検出部と、
該加速度検出部が検出した加速度の情報を含む信号を送信する信号送信部と、
を備え、
前記制御装置は、
前記電波送受体の前記信号送信部から信号を受信する装置受信部と、
前記装置受信部が受信した前記信号に基づき、前記対象物の施解錠を制御する施解錠制御部と、
を備え、
前記電波送受体と前記制御装置のいずれか一方又は両方は、前記対象物と前記電波送受体の距離を測定する距離測定部を備え、
前記施解錠制御部は、前記距離測定部が測定した距離と前記加速度の情報を基に、前記対象物の施解錠を制御する制御システム。
【請求項2】
前記電波送受体と前記制御装置のいずれか一方又は両方は、
前記対象物と前記電波送受体の間の距離についての予め定めた距離閾値及び/又は前記電波送受体に与えられる加速度についての予め定めた加速度閾値と、を記憶する記憶部と、
前記距離閾値と前記距離測定部が測定した距離とを比較し、前記距離測定部が測定した距離が前記距離閾値以下の場合には、前記電波送受体は所定領域内に在ると判定する領域判定部と、
前記加速度閾値と前記加速度検出部が検出した加速度とを比較し、前記加速度検出部が検出した加速度が前記加速度閾値以上の場合には、前記電波送受体は移動していると判定する移動判定部と、
を備え、
前記領域判定部が前記電波送受体は前記所定領域内に在ると判定し、かつ、前記移動判定部が前記電波送受体は移動していると判定した場合、前記施解錠制御部は前記対象物を解錠し、
前記領域判定部が前記電波送受体は前記所定領域内に在ると判定せず、かつ、前記移動判定部が前記電波送受体は移動していると判定した場合、前記施解錠制御部は前記対象物を施錠し、
前記移動判定部が前記電波送受体は移動していると判定しない場合、前記施解錠制御部は前記対象物の施錠状態又は解錠状態を維持する、
ことを特徴とする請求項1に記載の制御システム。
【請求項3】
前記記憶部は、前記距離閾値として予め定めた施錠距離閾値と解錠距離閾値とを記憶しており、
前記領域判定部は、
前記施錠距離閾値と前記距離測定部が測定した距離とを比較し、前記距離測定部が測定した距離が前記施錠距離閾値以上の場合には、前記電波送受体は施錠領域内に在ると判定し、
前記解錠距離閾値と前記距離測定部が測定した距離とを比較し、前記距離測定部が測定した距離が前記施錠距離閾値以下の場合には、前記電波送受体は解錠領域内に在ると判定し、
前記領域判定部が前記電波送受体は前記解錠領域内に在ると判定し、かつ、前記移動判定部が前記電波送受体は移動していると判定した場合、前記施解錠制御部は前記対象物を解錠し、
前記領域判定部が前記電波送受体は前記施錠領域内に在ると判定し、かつ、前記移動判定部が前記電波送受体は移動していると判定した場合、前記施解錠制御部は前記対象物を施錠する、
ことを特徴とする請求項2に記載の制御システム。
【請求項4】
前記施錠距離閾値は、前記解錠距離閾値より大であることを特徴とする請求項3に記載の制御システム。
【請求項5】
前記対象物は車両であり、前記制御装置は前記車両に備えられた車載制御装置であり、前記電波送受体は前記車載制御装置と通信する携帯機であることを特徴とする請求項1乃至4いずれかに記載の制御システム。
【請求項6】
前記車載制御装置は、前記携帯機に応答要求信号を送信する装置送信部をさらに備え、
前記携帯機は、前記装置送信部が送信する応答要求信号を受信する信号受信部をさらに備え、
前記距離測定部と、前記加速度閾値を記憶する前記記憶部と、前記移動判定部は、前記携帯機に備えられ、
前記距離閾値を記憶する前記記憶部と前記領域判定部は、前記車載制御装置に備えられ、
前記携帯機の前記距離測定部は、前記信号受信部が受信した前記応答要求信号の信号強度を測定し、
前記携帯機の前記信号送信部は、測定された前記信号強度の情報をさらに含む前記信号を送信し、
前記車載制御装置の前記装置受信部は、前記信号を受信し、
前記車載制御装置の前記領域判定部は、受信した前記信号に含まれる前記信号強度の情報に基づき、前記携帯機が前記車両から前記所定領域内に在ると判定することを特徴とする請求項5に記載の制御システム。
【請求項7】
請求項1乃至6に記載の制御システムに使用される制御装置。
【請求項8】
特定の対象物の施解錠を制御する制御装置と、前記対象物の施解錠を制御するために無線通信を行う電波送受体であって、
前記電波送受体は、
自身に与えられる加速度を検出する加速度検出部と、
前記対象物との距離を測定する距離測定部と、
前記加速度検出部が検出した加速度の情報と前記距離測定部が測定した距離の情報を基に前記対象物の施解錠を制御する制御信号を生成する施解錠信号生成部と、
前記施解錠信号生成部が生成する前記制御信号を含む信号を送信する信号送信部と、
を備え、
前記施解錠信号生成部が生成した前記制御信号に基づき、前記制御装置の前記施解錠実行部に前記対象物の施解錠を実行させる電波送受体。
【請求項9】
電波送受体と制御装置が無線通信手段を介して通信し、特定の対象物の施解錠を制御する制御方法であって、
前記対象物と前記電波送受体の距離を測定し、
前記電波送受体が、自身に与えられる加速度を検出すると共に、該加速度の情報を前記制御装置に送信し、
前記制御装置が、送信された前記加速度の情報を受信し、
受信した前記加速度の情報を基に、前記加速度が予め定めた加速度閾値以上であることにより前記電波送受体が移動していると判定し、
測定した前記距離を基に、前記距離が予め定めた距離閾値以下であることにより前記電波送受体が所定領域内に在ると判定し、
前記電波送受体が前記所定領域内に在ると判定し、かつ、前記電波送受体が移動していると判定した場合、前記対象物を解錠し、
前記電波送受体が前記所定領域内に在ると判定せず、かつ、前記電波送受体が移動していると判定した場合、前記対象物を施錠し、
前記電波送受体が移動していると判定しない場合、前記対象物の施錠状態又は解錠状態を維持する、
制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−40474(P2013−40474A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−177178(P2011−177178)
【出願日】平成23年8月12日(2011.8.12)
【出願人】(510123839)オムロンオートモーティブエレクトロニクス株式会社 (110)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月12日(2011.8.12)
【出願人】(510123839)オムロンオートモーティブエレクトロニクス株式会社 (110)
【Fターム(参考)】
[ Back to top ]