
施設内ナビゲーションシステム
【課題】 短時間で通信を行う施設内ナビゲーションシステムを提供する。
【解決手段】 ゴルフ場1内のクラブハウスに設置される親機100と、カート501〜509に搭載されるカート機301〜309及びプレーヤが携行する携帯機401〜404とは、GHz帯域の特定小電力無線により通信する。短距離通信を中継するために、ゴルフ場1内には、中継器210〜214が設置される。親機100及び中継器210〜214の間の中継通信と、中継器210〜214とカート機501〜509及び携帯機401〜404との間の同報通信とは、互いに周波数の異なる特定小電力無線を使用する。同一中継器の中継通信と同報通信とは時期を異ならせて行われる一方、ある中継器と別の中継器との間では、中継通信と同報通信とが同一時期に行われる。
【解決手段】 ゴルフ場1内のクラブハウスに設置される親機100と、カート501〜509に搭載されるカート機301〜309及びプレーヤが携行する携帯機401〜404とは、GHz帯域の特定小電力無線により通信する。短距離通信を中継するために、ゴルフ場1内には、中継器210〜214が設置される。親機100及び中継器210〜214の間の中継通信と、中継器210〜214とカート機501〜509及び携帯機401〜404との間の同報通信とは、互いに周波数の異なる特定小電力無線を使用する。同一中継器の中継通信と同報通信とは時期を異ならせて行われる一方、ある中継器と別の中継器との間では、中継通信と同報通信とが同一時期に行われる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えばゴルフ場、テーマパーク、遊園地、工場などの施設内で使用される施設内ナビゲーションシステムに関する。
【背景技術】
【0002】
従来、この種の施設内ナビゲーションシステムとして、例えば特許文献1に開示されるものが知られている。この従来技術によるナビゲーションシステムは、ゴルフ場で使用されるものであり、クラブハウスに設けられたコントロールセンターと、各カートに搭載されたカート用子機と、各カートに対応する幾つかの携帯用子機とを備えている。コントロールセンターは、GPS(全地球測位システム)受信機を備えており、事前に計測されたGPS基準値と、GPS衛星からの電波により得られたGPS値との差分を、GPS補正値として算出し、無線により各カート用子機へ送信する。各カート用子機は、GPS受信機を備えており、送信されたGPS補正値を用いて自身のGPS値を補正する。それにより各カート用子機は、補正後のGPS値をコントロールセンターへ無線で返送するとともに、自身の位置からグリーンまでの距離を算出し、対応する携帯用子機へ無線で送信する。それにより、コントロールセンターの管理者は、各カートの位置を精度良く把握し得るとともに、携帯用子機の携行者すなわちプレーヤは、自身のカートの位置からグリーンまでの距離を、良好な精度で把握することが可能となっている。
【特許文献1】特許第3098743号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来においてこの種の施設内ナビゲーションシステムでは、業務無線が使用されており、その帯域はMHz帯域である。そのため通信速度が、例えば4,800bpsと低いものとなり、コントロールセンターからGPS補正値を送信したり、多数のカートからそれぞれのGPS値を、時間をずらして送信したりするのに時間を要する。さらに、GPS補正値やGPS値の他に、付加情報を伝えようとすれば、通信に要する時間はさらに長いものとなる。カートは移動するものであり、通信時間の遅れは、位置精度の低下につながる。また、各カート用子機にマイクを備え、データのみならず緊急時の音声連絡をコントロールセンターへ送ることができるように、システムを構築した場合、コントロールセンターが各カート用子機と行っている通常の通信が、全てのカート用子機を一巡するまで、音声通信が待たされることとなる。すなわち、緊急の音声連絡が円滑に行われない場合がある。
【0004】
本発明は上記の問題点に鑑みてなされたもので、短時間で通信を行う施設内ナビゲーションシステムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決し上記目的を達成するために、本発明のうち第1の態様に係るものは、施設内ナビゲーションシステムであって、特定小電力無線により通信する、親機と複数の中継器と可搬性の複数の子機とを備えている。そして、前記複数の中継器は、前記親機からの通信内容を順に伝えるとともに、前記複数の中継器の少なくとも一部は、前記通信内容を前記複数の子機に同報通信するものである。また、前記親機はGPS受信機を有しており、GPS基準値に対するGPS補正値を演算して前記通信内容として送信する。さらに、前記複数の子機の各々はGPS受信機を有しており、同報通信された前記GPS補正値を用いて自身のGPS値を補正する。また、前記複数の中継器の前記少なくとも一部は、前記親機及び前記複数の中継器の間でなされる中継通信とは異なる周波数で同報通信を行うものである。
【0006】
この構成によれば、複数の中継器を備えることにより、施設内での親機と複数の子機との間の無線通信が、データ通信速度が高く、免許、資格、届出を要せず簡便な短距離無線である特定小電力無線を使って実現する。各子機は、親機から送られるGPS補正値に基づいて、自身のGPS値を補正するので、精度の高いGPS値を取得できる。さらに、親機及び複数の中継器の間でなされる通信、すなわち中継通信とは異なる周波数で同報通信が行われるので、中継通信と同報通信の間の混線を生じることなく、中継通信と同報通信とを同時に行うことができる。それにより、複数の中継器を介した親機と複数の子機との間の通信に要する時間を短縮することができる。なお可搬性の子機は移動可能であれば足り、例えば、携帯電話機と同様にユーザが携帯可能なものであっても良く、ゴルフ場のカートに据えられたもののように、移動体に設置されたものであっても良い。
【0007】
本発明のうち第2の態様に係るものは、第1の態様に係る施設内ナビゲーションシステムであって、前記複数の中継器のうち、中継通信と同報通信とを行う各中継器は、通信時間が互いに重複しないようにこれらの通信を行うとともに、前記複数の中継器は、互いに異なる一部の中継器の間で、一方が中継通信を行う時間に重複して他方が同報通信を行うものである。
【0008】
この構成によれば、中継通信と同報通信との双方を行う中継器は、通信時間が互いに重複しないようにこれら双方の通信を行うので、互いの通信電波の影響を排しつつ、中継用の無線通信回路と同報通信用の無線通信回路とを同一基板の上に設置することが可能となる。同一の中継器については、中継通信と同報通信との時間重複を回避しつつも、異なる中継器の間では、中継通信と同報通信の通信時間が重複するものが存するので、複数の中継器を介した親機と複数の子機との間の通信に要する時間が短縮される。
【0009】
本発明のうち第3の態様に係るものは、第1または第2の態様に係る施設内ナビゲーションシステムであって、前記複数の子機の各々は、補正後の自身のGPS値を発信し、前記複数の中継器は、発信された前記GPS値を前記親機へ伝えるものである。
【0010】
この構成によれば、複数の子機から送られる補正後の各自のGPS値が、複数の中継器によって親機に伝えられるので、親機の管理者は、各子機の位置を把握することができる。
【0011】
本発明のうち第4の態様に係るものは、第3の態様に係る施設内ナビゲーションシステムであって、前記親機は、前記複数の子機のGPS値に基づいて、当該複数の子機の各々に対応づけられた1つの子機のGPS値を、当該対応関係とともに前記通信内容として送信するものである。
【0012】
この構成によれば、各子機は、同報通信を受信することにより、自身に対応付けられた別の子機のGPS値を把握できる。それにより各子機は、自身に対応付けられた別の子機の位置を表示することができ、さらには自身と、自身に対応付けられた別の子機との間の距離を算出し、表示することも可能となる。例えば、一定のコースを追い越しなしで順序よく回遊する施設、例えばゴルフ場において、子機のユーザ(例えばゴルフプレーヤ)は、自身に先行するユーザ(例えばゴルフプレーヤ)の位置を把握したり、当該ユーザとの距離を把握したりすることが可能となる。
【0013】
本発明のうち第5の態様に係るものは、第1ないし第4のいずれかの態様に係る施設内ナビゲーションシステムであって、同報通信データは、発信する中継器の識別データを含んでおり、前記複数の子機の各々は、受信電波の強度を計測する回路を有しており、返答を要する同報通信データを受信した場合、受信電波強度の最も高い電波を発信した中継器を前記識別データに基づいて特定し、特定された当該中継器から親機へ中継すべく中継経路を指示するデータを含めて返答データを発信するものである。
【0014】
この構成によれば、各子機は、受信強度の最も高い電波を発信した中継器、すなわち自身との間で最も電波の伝わり易い中継器を特定し、当該中継器から親機に伝えるべく、返答データを発信するので、十分な受信強度が得られた電波を発信した中継器から親機へ返答データが伝えられる。それにより親機は、返答データを誤りなく受け取ることが可能となる。
【0015】
本発明のうち第6の態様に係るものは、第1ないし第5のいずれかの態様に係る施設内ナビゲーションシステムであって、前記親機又は前記複数の子機の各々は、GPS値が得られている施設内の2地点間の距離を算出するものであり、施設の略北端の単位経度当たりの距離と、施設の略南端の単位経度当たりの距離と、施設の南北方向略中央での単位緯度当たりの距離と、を記憶するためのメモリを有している。前記親機又は前記複数の子機の各々はさらに、前記2地点の平均緯度での単位経度当たりの距離を、施設の略北端の単位経度当たりの距離と、略南端の単位経度当たりの距離とから線型補間して算出する手段を有し、前記2地点の経度差に、算出された前記平均緯度での単位経度当たりの距離を乗じて前記2地点の東西方向距離を算出する手段を有し、前記2地点の緯度差に、前記略中央での単位緯度当たりの距離を乗じて前記2地点の南北方向距離を算出する手段を有し、前記東西方向距離と前記南北方向距離との自乗和の平方根を、前記2地点間の距離として算出する手段を有している。
【0016】
この構成によれば、施設内の2地点間の距離、例えば、子機の現在位置と特定地点との間の距離、異なる子機の現在位置間の距離、あるいは2つの特定地点間の距離が得られる。さらに、施設の略北端の単位経度当たりの距離と、施設の略南端の単位経度当たりの距離と、施設の南北方向略中央での単位緯度当たりの距離とに基づく近似計算が用いられるので、2地点間の距離が精度良く、かつ短時間で得られる。子機が2地点間の距離を計算する場合には、メモリに記憶すべき基準となる各距離は、例えばRS232C等のインタフェースを通じて親機から各子機のメモリに予め書き込んでも良い。
【0017】
本発明のうち第7の態様に係るものは、第6の態様に係る施設内ナビゲーションシステムであって、前記複数の子機の各々は、施設内の特定地点のGPS値を記憶するためのメモリを有しており、当該メモリに記憶された前記特定地点のGPS値と、補正後の自身のGPS値とに基づいて、自身の位置と前記特定地点との間の距離を、前記2地点間の距離として算出して表示するものである。
【0018】
この構成によれば、各子機のユーザは、自身と特定地点との間の距離を把握することが可能となる。特定地点は、例えばゴルフ場において、各子機のユーザ(すなわちゴルフプレーヤ)が目標とすべきピンの位置に設定することができる。特定地点のGPS値は、例えばRS232C等のインタフェースを通じて親機から各子機のメモリに予め書き込んでも良く、親機から中継器を通じて各子機に通信内容として同報通信し、これを各子機がメモリに書き込んでも良い。
【0019】
本発明のうち第8の態様に係るものは、第1ないし第7のいずれかの態様に係る施設内ナビゲーションシステムであって、前記複数の子機の各々は、施設内に設けられた1以上の特定区域のいずれかに自身が存在するか否か、かつ存在する場合には何れに存在するかを表示するものであり、前記1以上の特定区域毎に当該特定区域を覆うように設定された1以上の凸多角形の各角の位置を記憶するためのメモリを有している。前記複数の子機の各々はさらに、任意の凸多角形について、一周する方向に定義される各辺のベクトルと、起点を共通にして補正後の自身のGPS値へ向かうベクトルとの外積の符号を算出する手段を有し、前記外積の符号が全て同一である凸多角形が存するか否かを判定する手段を有し、前記判定により、前記外積の符号が全て同一である凸多角形が存する場合に、当該凸多角形が覆う特定区域内に自身の位置が存在する旨を表示する手段を有している。
【0020】
この構成によれば、各子機のユーザは、施設内の1以上の特定区域の何れに自身が存在するか、あるいは何れにも存在しないかを把握することができる。しかも当該判断が、簡単なベクトル演算を使ってなされるので、精度の良い判断結果が短時間で得られる。施設内ナビゲーションシステムが、ゴルフ場ナビゲーションシステムである場合には、18個のホールを1以上の特定区域とすることができる。なお、本発明において「多角形」とは、三角形及び四角形をも含むものであり、「凸多角形」とは、全ての内角が180度より小さい多角形である。三角形は必然的に凸多角形となる。各凸多角形の各角の位置は、例えばRS232C等のインタフェースを通じて親機から各子機のメモリに予め書き込んでも良い。
【0021】
本発明のうち第9の態様に係るものは、第1ないし第8のいずれかの態様に係る施設内ナビゲーションシステムであって、かつ当該システムがゴルフ場ナビゲーションシステムであり、前記複数の子機の各々は、直線又は折れ線で表現された第1打点からピンまでの推奨コースと、自身の位置からピンまでの距離に応じた目標飛距離とを記憶するためのメモリを有している。前記複数の子機の各々はさらに、補正後のGPS値に基づく自身の位置からピンまでの距離を算出する手段を有し、補正後のGPS値に基づく前記自身の位置を中心とし、算出された前記距離に応じた前記目標飛距離を半径とする円と前記推奨コースとの交点の位置を算出する手段を有し、算出された前記交点の位置を目標地点として前記推奨コースとともに表示する手段を有している。
【0022】
この構成によれば、第1打点からピンまでの推奨コースと、補正後のGPS値に基づく自身の位置を中心とし目標飛距離を半径とする円との交点の位置が、目標地点として算出され、表示されるので、各子機のユーザ(すなわちゴルフプレーヤ)は、目標地点を把握することができる。しかも精度良く、かつ短時間で目標地点が得られる。なおメモリは、第1打点からピンまでの推奨コースの記憶内容として、例えば、推奨コースを表現する直線又は折れ線の方程式を規定する係数を記憶しても良い。一般に、推奨コースを一意に規定し得るデータを記憶すれば足りる。推奨コースと目標飛距離は、例えばRS232C等のインタフェースを通じて親機から各子機のメモリに予め書き込んでも良い。
【0023】
本発明のうち第10の態様に係るものは、第9の態様に係る施設内ナビゲーションシステムであって、前記複数の子機の各々は、基準距離とゴルフ場のグリーン上の所定位置とを記憶するためのメモリを有し、補正後のGPS値に基づく自身の位置からピンまでの前記距離を、前記基準距離と比較する手段を有している。そして、前記表示する手段は、前記比較により自身の位置からピンまでの前記距離が前記基準距離よりも小さい場合には、前記グリーン上の前記所定位置を目標地点として前記推奨コースとともに表示するものである。
【0024】
この構成によれば、自身の位置からピンまでの距離が基準距離よりも小さい場合には、グリーン上の所定位置が目標地点として表示されるので、プレーヤは自身の位置がグリーンに近くなったときには、グリーン内の所定位置を目標とすることができる。グリーン上の所定位置は、例えばピン、センタ、エッジのいずれかの位置である。なお、基準距離及び所定位置を記憶するメモリと、推奨コース及び目標飛距離を記憶するメモリとは、同一メモリの異なる記憶領域であっても良い。
【0025】
本発明のうち第11の態様に係るものは、第1ないし第10のいずれかの態様に係る施設内ナビゲーションシステムであって、別の親機と、当該別の親機と業務無線により音声通信する可搬性の別の複数の子機と、をさらに備えるものである。
【0026】
この構成によれば、別系統の音声通信システムを備えるので、各ユーザから親機への緊急連絡が即時に可能となる。また、既に設置されている業務無線設備を廃棄せずに利用することができる。
【発明の効果】
【0027】
以上のように本発明によれば、短時間で通信を行う施設内ナビゲーションシステムが実現する。
【発明を実施するための最良の形態】
【0028】
(1.子機の機能)
図1は、本発明の一実施の形態による施設内ナビゲーションシステムに用いられる子機の一例を示す外観図である。本実施の形態による施設内ナビゲーションシステムは、ゴルフ場ナビゲーションシステムとして具体化されており、図1に例示する子機は、ゴルフ場の顧客であるプレーヤを乗せてゴルフ場内を移動するカートに搭載されるカート機300である。カート機300は、GPS受信機(図示略)を有するとともに、クラブハウスに設置される親機と、ゴルフ場内の複数の中継器を介して特定小電力無線によりデータ通信を行う。特定小電力無線の周波数は、例えばGHz帯域であり、それにより通信速度を高め、通信を短時間で行うことを可能にしている。カート機300は、自身のGPS値等のデータを、親機へ送信することも可能である。親機も、GPS受信機を備えている。
【0029】
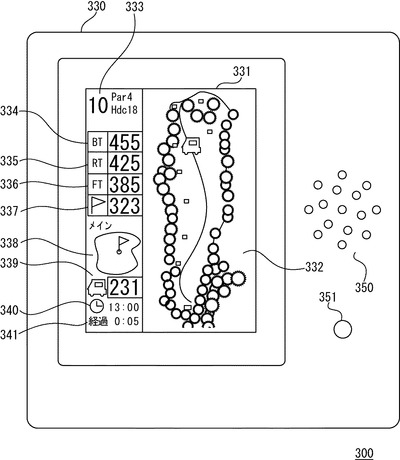
カート機300は、ケース330の前面に液晶表示器等の画面331を有している。画面331には、自身が現在あるホール番号等のホール情報333が表示されるとともに、当該ホールの絵地図332が表示される。絵地図332上には、カート機300自身の位置及びその前方カート機300の位置が、カートの絵図で表示される。画面331には、さらに、BT(バックティ)、RT(レギュラーティ)及びFT(フロントティ)からピンまでの距離334、335、336と、自身の位置からピンまでの距離337とが、ヤード単位で表示される。そのほか、本日の使用グリーンとピン位置が絵図338で表示され、カート機300から前方カートまでの距離339がヤード単位で表示される。また、現在時刻340及び経過時間341が、数値で表示される。ケース330の前面には、案内音声を出力するスピーカ350が設けられており、さらに表示内容の切り替え等のためのボタンスイッチ351が設けられている。
【0030】
図2は、同ゴルフ場ナビゲーションシステムに用いられる子機の別の一例を示す外観図である。当該子機は、ゴルフ場の顧客であるプレーヤが携行する携帯機400である。携帯機400も、カート機300と同様に、GPS受信機(図示略)を搭載するとともに、クラブハウスに設置される親機と、ゴルフ場内の複数の中継器を介して特定小電力無線によりデータ通信を行う。幾つかの携帯機400が、一つのカート機300に対応付けられている。但し携帯機400は、親機から送られる通信データを、カート機300を介することなく中継器から直接に受信する。
【0031】
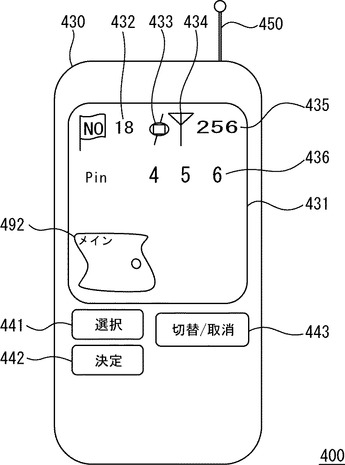
携帯機400は、ケース430の前面に液晶表示器等の画面431を有している。画面431には、自身が現在あるホール番号432が表示されるとともに、GPS受信状況を示す絵図433及び特定小電力無線の受信状況を示す絵図434が表示される。画面431には、さらに、自身に対応付けられたカート機300が設置されるカートの番号435が数値で表示される。カート番号435は、携帯機400を携行するプレーヤが、搭乗すべきカートを誤らないように表示されるものである。なお、カートのボディ側面等にはカート番号が記されている。また画面431には、自身の位置からピンまでの距離436が、ヤード単位で表示されるほか、本日の使用グリーンとピン位置が絵図492で表示される。ケース430の前面にはさらに、表示内容の切り替え等のためのボタンスイッチ441、442、443が設けられている。
【0032】
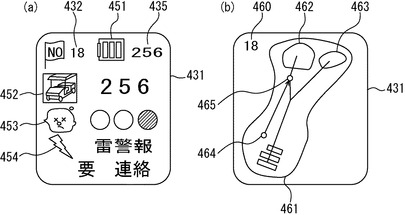
図3は、プレーヤが切り替えることにより画面431に現れる別の表示内容を例示する画面図である。図3(a)の例では、電池の充電状態を示す絵図451、自身から自身に対応付けられたカート機300の前方カート機300までの距離452、当該距離452に基づく安全進行管理指示453、及び雷警報等の警報454が表示される。安全進行管理指示453として、安全を示す青丸記号、注意進行すべき旨を示す黄丸記号、及び待機すべき旨を示す赤丸記号が、距離452に応じて表示される。
【0033】
図3(b)の例では、自身が現在あるホール番号460が表示されるとともに、当該ホールの絵地図が表示される。絵地図上には、ティーグラウンド461、メイングリーン462、及びサブグリーン463が絵図で表示されるほか、ティーグラウンド461からメイン及びサブグリーン462、463までの推奨コースが表示される。絵地図上にはさらに、自身の位置464、及び次の目標点465が表示される。目標点465は、推奨コース上に表示される。
【0034】
(2.親機、中継器及び子機の構成)
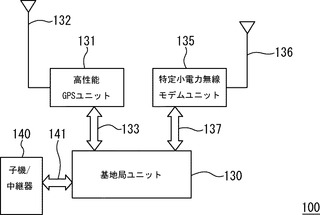
図4は、本実施の形態によるゴルフ場ナビゲーションシステムに使用される親機の構成例を示すブロック図である。当該親機100は、クラブハウス等に設置されるもので、基地局ユニット130、GPS受信機131、GPSアンテナ132、特定小電力無線モデムユニット135、及び通信アンテナ136を有している。GPS受信機131は、精度の高い高性能GPSユニットであり、GPSアンテナ132を通じてGPS衛星からの電波を受信することにより、自身のGPS値を取得する。GPS受信機131には、また、予め計測された自身のGPS基準値が基地局ユニット130から送られる。そしてGPS受信機131は、取得した自身のGPS値のGPS基準値からの誤差を、GPS補正値として算出する。基地局ユニット130は、例えばパーソナルコンピュータとして構成されており、GPS基準値を、例えばハードディスク等の記憶装置に格納している。基地局ユニット130は、電源が投入されOS(オペレーティングシステム)が立ち上がると、GPS基準値をGPS受信機131へ送る。GPS受信機131で算出されたGPS補正値は、RS232C等のインタフェース133を通じて基地局ユニット130に伝えられる。
【0035】
基地局ユニット130は、受け取ったGPS補正値を、中継器の経路を指定して、モデムユニット135へ受け渡す。基地局ユニット130とモデムユニット135との間の通信は、RS232C等のインタフェース137を通じて行われる。モデムユニット135は、GPS補正値と中継器の経路指定情報を受け取ると、特定小電力無線に載せて当該通信データを通信アンテナ136より発信する。
【0036】
基地局ユニット130には、RS232C等のインタフェース141を通じて、カート機300、携帯機400などの子機、及び中継器などの外部機器140を接続することも可能である。それにより、これらの子機及び中継器に、データ或いはプログラムを供給することが可能となっている。例えば、各ホールの絵地図332、カート番号435、ピン等のGPS値、及び推奨コースのデータ、子機の識別データ(ID)などを、インタフェース141を通じて子機に供給することが可能である。特に、携帯機400に付与されるカート番号435及び識別データ(ID)は、新たなプレーヤに携帯機400を手渡す毎に書き換えることにより、少ない個数の携帯機400を効率よく使い回しすることが可能となる。また、基地局ユニット130は、LCD等の表示器(図示略)を有しており、例えば、自身が内蔵するメモリ(図示略)に記憶しているゴルフ場全体の絵地図データと、受け取ったGPS補正値とに基づいて、絵地図上に、各カート機300の位置を表示することも可能となっている。
【0037】
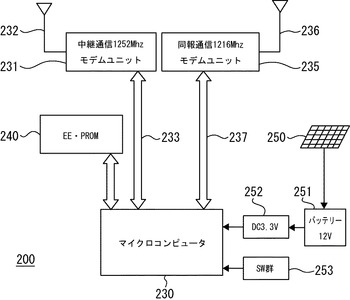
図5は、本実施の形態によるゴルフ場ナビゲーションシステムに使用される中継器の構成例を示すブロック図である。当該中継器200は、ゴルフ場内に設置されるもので、マイクロコンピュータ230、フラッシュROM等のメモリ240、中継通信モデムユニット231、中継通信アンテナ232、同報通信モデムユニット235、及び同報通信アンテナ236を有している。マイクロコンピュータ230及びメモリ240は、演算を行うとともに2つのモデムユニット231、235とデータをやり取りする制御ユニットの主要部をなすものである。制御ユニットとモデムユニット231、235とは、それぞれUART等のインタフェース233、237を通じてデータ通信を行う。制御ユニット及びモデムユニット231、235の電源は、太陽電池250により供給される電力をバッテリー251に蓄え、さらにコンバータ252により所定の電圧に調整することにより供給される。また、制御ユニットには、管理者が様々な設定を可能にするスイッチ群253が接続されている。メモリ240には、例えば中継器200自身の識別データ(ID)が記憶される。
【0038】
中継通信モデムユニット231は、親機100あるいは他の中継器200からの特定小電力無線を、中継通信アンテナ132を通じて受信し、復調することにより、GPS補正値等の通信データを取得する。取得した通信データは、インタフェース233を通じてマイクロコンピュータ230へ伝えられる。マイクロコンピュータ230は、受け取った通信データに付されている経路指定情報を解読し、他の中継器又は親機100へ中継すべきものであれば、この通信データを中継通信モデムユニット231へ送る。中継通信モデムユニット231は、この通信データを特定小電力無線に載せて、中継通信アンテナ232から発信する。発信された電波は、他の中継器の中継通信アンテナ232、又は親機100の通信アンテナ136により受信されることにより、中継が実現する。
【0039】
マイクロコンピュータ230はさらに、中継通信モデムユニット231から受け取った通信データの経路指定情報に基づいて、カート機300及び携帯機400へ同報通信すべきものか否かを判断し、同報通信すべきものであれば、経路指定情報として同報通信を指定する情報を書き込み、さらに自身の識別データ(ID)を付して、通信データを同報通信モデムユニット235へ受け渡す。同報通信モデムユニット235は、受け取った通信データを特定小電力無線に載せて、同報通信アンテナ236から発信する。当該通信データは、電波の届く範囲にある全てのカート機300及び携帯機400によって受信される。このように中継器200を中継することにより、親機100からカート機300及び携帯機400へ、通信データが送られる。
【0040】
同報通信モデムユニット235は、また、カート機300からの特定小電力無線を、同報通信アンテナ236を通じて受信し、復調することにより、カート機300のGPS値等の通信データを取得する。取得した通信データは、インタフェース237を通じてマイクロコンピュータ230へ伝えられる。マイクロコンピュータ230は、受け取った通信データに付されている経路指定情報を解読し、他の中継器又は親機100へ中継すべきものであれば、この通信データを中継通信モデムユニット231へ送る。中継通信モデムユニット231は、この通信データを特定小電力無線に載せて、中継通信アンテナ232から発信する。中継通信アンテナ232から発信された電波は、他の中継器の中継通信アンテナ232、又は親機100の通信アンテナ136により受信される。このように中継器200を中継することにより、カート機300から親機100へ、通信データが送られる。
【0041】
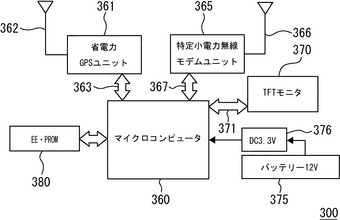
図6は、図1に外観を示したカート機300の構成例を示すブロック図である。カート機300は、マイクロコンピュータ360、フラッシュROM等のメモリ380、省電力GPSユニットであるGPS受信機361、GPSアンテナ362、特定小電力無線モデムユニット365、通信アンテナ366、及びTFTモニタである表示器370を有している。マイクロコンピュータ360及びメモリ380は、演算を行うとともに2つのユニット361、365及び表示器370とデータをやり取りする制御ユニットの主要部をなすものである。制御ユニットとGPS受信機361及びモデムユニット365とは、それぞれUART等のインタフェース363、367を通じてデータ通信を行う。マイクロコンピュータ360その他の電源は、例えば充電式のバッテリー375により供給される電力を、コンバータ376により所定の電圧に調整することにより供給される。
【0042】
GPS受信機361は、GPSアンテナ362を通じてGPS衛星からの電波を受信することにより自身のGPS値を取得し、マイクロコンピュータ360に伝える。一方、モデムユニット365は、中継器200からの特定小電力無線を、通信アンテナ366を通じて受信し、復調することにより、同報通信されたGPS補正値等の通信データを取得する。取得した通信データは、マイクロコンピュータ360へ伝えられる。マイクロコンピュータ360は、通信データがGPS補正値を含んでおれば、GPS受信機363から伝えられたGPS値を、GPS補正値により補正する。
【0043】
マイクロコンピュータ360は、補正後のGPS値を用いて、表示器370の画面331(図1)に、自身の位置を表示させたり、自身の位置からピンまでの距離を演算し、表示させたりする。マイクロコンピュータ360はさらに、補正後のGPS値を通信データに含めて、経路指定情報を書き込み、さらに自身の識別データ(ID)を付して、モデムユニット365へ送る。モデムユニット365は、この通信データを特定小電力無線に載せて、中継通信アンテナ366から発信する。発信された電波は、中継器200の中継通信アンテナ232、又は親機100の通信アンテナ136により受信される。それにより、カート機300からの通信データが親機100へ届けられる。
【0044】
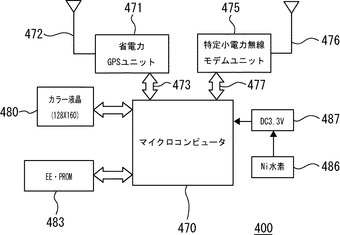
図7は、図2に外観を示した携帯機400の構成例を示すブロック図である。携帯機400は、カート機300と類似の構成を採っており、マイクロコンピュータ470、フラッシュROM等のメモリ483、省電力GPSユニットであるGPS受信機471、GPSアンテナ472、特定小電力無線モデムユニット475、通信アンテナ476、及びカラー液晶モニタである表示器480を有している。マイクロコンピュータ470及びメモリ483は、演算を行うとともに、2つのユニット471、475及び表示器480とデータをやり取りする制御ユニットの主要部をなすものである。制御ユニットとGPS受信機471及びモデムユニット475とは、それぞれUART等のインタフェース473、477を通じてデータ通信を行う。マイクロコンピュータ470その他の電源は、例えば充電式のニッケル水素バッテリー486により供給される電力を、コンバータ487により所定の電圧に調整することにより供給される。
【0045】
GPS受信機471は、GPS受信機361と同様に、GPSアンテナ472を通じてGPS衛星からの電波を受信することにより自身のGPS値を取得し、マイクロコンピュータ470に伝える。またモデムユニット475は、モデムユニット365と同様に、中継器200からの特定小電力無線を、通信アンテナ476を通じて受信し、復調することにより、同報通信されたGPS補正値等の通信データを取得する。取得した通信データは、マイクロコンピュータ470へ伝えられる。マイクロコンピュータ470は、通信データがGPS補正値を含んでおれば、GPS受信機471から伝えられたGPS値を、GPS補正値により補正する。
【0046】
マイクロコンピュータ470は、補正後のGPS値を用いて、表示器480の画面431(図2、図3)に、自身の位置を表示させたり、自身の位置からピンまでの距離を演算し、表示させたりする。携帯機400は、カート機300とは異なり、補正後のGPS値を親機100へ送る機能を要しない。
【0047】
(3.システムの全体構成)
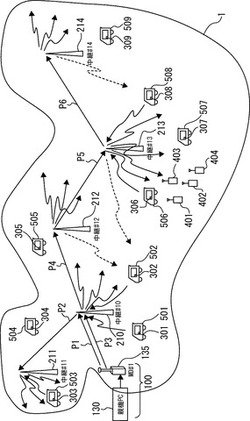
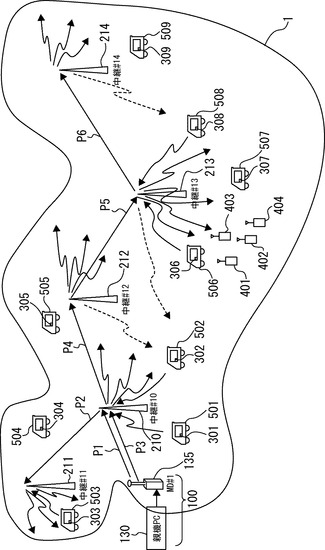
図8は、本実施の形態によるゴルフ場ナビゲーションシステムの全体構成を例示する概略図である。この構成例では、施設としてのゴルフ場1のクラブハウス(図示略)内に親機100が設置され、ゴルフ場1内の所々に5台の中継器210〜214が設置されている。またゴルフ場1内には、例えば9台のカート501〜509が使用中であり、カート機301〜309がそれぞれ搭載されている。また、カート501〜509の各々の近辺では、それぞれカート機301〜309に対応付けられた携帯機を携行するプレーヤ(図示略)がプレー中である。図8には、全てのカート機301〜309を代表して、カート機306に対応付けられた携帯機401〜404のみを例示している。カート機301〜309の各々は、図1及び図6に示したカート機300と同一である。また、携帯機401〜404の各々は、図2、図3及び図7に示した携帯機400と同一である。なお、カート機301〜309を代表してカート機300と適宜記載し、携帯機401〜404を代表して携帯機400と適宜記載する。
【0048】
図8の例では、親機100から子機、すなわちカート機301〜309及び携帯機401〜404へ通信データを送る場合には、中継経路P1及びP2に沿って、中継器210及び中継器211へ通信データが順に送られる。そして、中継器210及び211のそれぞれが、通信データを同報通信する。次に、中継経路P3、P4、P5及びP6に沿って親機100から中継器210、212〜214へ通信データが順に送られる。そして、中継器212〜214のそれぞれが、通信データを同報通信する。このとき中継器210は、先に同報通信を終えているので、重複を避けるために同報通信しない。カート機301〜309及び携帯機401〜404は、受信可能な範囲内にある中継器210〜214から同報通信を受信する。
【0049】
カート機301〜309から親機へ通信データを送る場合には、カート機301〜309は、受信強度の最も高い電波を発信した中継器を指定して通信データを発信する。中継器210〜214のうち指定された中継器は、通信データを受信し、経路P1,P2又は経路P3〜P6を逆に辿るように通信データを中継し、親機100へ届ける。
【0050】
親機100、中継器210〜214、カート機301〜309及び携帯機401〜404の各々のモデムユニットには、識別データ(ID)が割り当てられている。図8の例では、親機100の特定小電力無線モデムユニット135には、IDとして#1が付与されている。また、中継器210〜214の中継通信モデムユニット231には、それぞれIDとして#10〜#14が付与されている。さらに中継器210〜214の同報通信モデムユニット235には、それぞれIDとして#20〜#24(図示略)が付与されている。また、カート機301〜309には、それぞれIDとして例えば#100〜#114のうちのいずれかが付与されている。携帯機401〜404には、対応するカート機306のIDと同一のIDが付与される。このようにIDを共通にすることにより、各携帯機400はいずれかのカート機300と対応付けられる。携帯機401〜404のIDは、既に述べた通り、カート番号435と同様に親機100の基地局ユニット130によって、使用の度に入力される。
【0051】
親機100と中継器210〜214との間の通信、すなわち中継通信には、例えば1.252GHzの特定小電力無線が使用される。これに対して、中継器210〜214からカート機301〜309及び携帯機401〜404への同報通信、及びカート機301〜309及び携帯機401〜404から中継器210〜214への返答通信には、例えば1.216GHzの特定小電力無線が使用される。このように、親機100と中継器210〜214との間の通信と、中継器210〜214とカート機301〜309及び携帯機401〜404との間の通信とは、何れも特定小電力無線を使用しつつも、周波数を異ならせて使用する。従って、親機100の特定小電力無線モデムユニット135、及び中継器200(210〜214)の中継通信モデムユニット231は、1.252GHzの特定小電力無線で通信を行う。また、中継器200(210〜214)のの同報通信モデムユニット235、カート機300(301〜309)の特定小電力無線モデムユニット365、及び、携帯機400(401〜404)の特定小電力無線モデムユニット475は、1.216GHzの特定小電力無線で通信を行う。
【0052】
このように中継通信と同報通信との間で無線周波数を異ならせることにより、中継通信と同報通信の間で混線を生じることなく、中継通信と同報通信とを同時に行うことが可能となる。それにより、複数の中継器210〜214を介して行われる親機100と複数のカート機301〜309及び携帯機401〜404との間の通信に要する時間を短縮することが可能となる。
【0053】
(4.システムの動作)
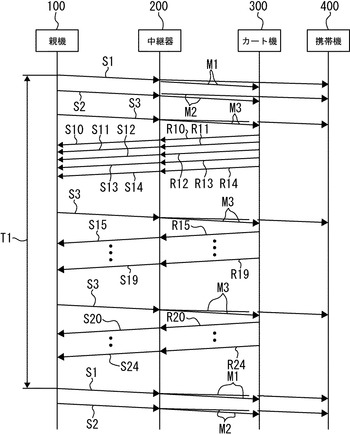
図9は、親機100、中継器200、カート機300及び携帯機400の間で行われる通信のシーケンス図である。図において、中継器210〜214を単一の中継器200で代表し、カート機301〜309を単一のカート機300で代表し、さらに携帯機401〜404を単一の携帯機400で代表している。データ通信は反復して行われるものであり、図9には周期T1の間の通信シーケンスを例示している。
【0054】
周期T1の間に、親機100は、3種類の中継通信データS1〜S3を送信する。中継通信データS1は、GPS補正値を伝えるための通信データであり、中継通信データS2は、本日の18ホールのピン位置を伝えるための通信データである。また、中継通信データS3は、各カート機300の前方カート機300の状態を伝えるとともに、各カート機300からそれぞれの補正後のGPS値の返送を要求する通信データであり、一種のポーリングを行うものである。各中継器200は、中継通信データS1〜S3を受信すると、同報通信データM1〜M3を発信する。同報通信データM1〜M3は、各カート機300及び携帯機400のそれぞれによって受信される。携帯機400は、対応するカート機300を介して同報通信データM1〜M3を受信するのではなく、カート機300と同様に、中継器200から直接に受信する。
【0055】
各カート機300は、同報通信データM3を受信すると、補正後の自身のGPS値を返答すべく返答通信データR10〜R24を発信する。図9では、ゴルフ場に準備されたカート機300の全数は、15台であると仮定している。稼働中でないカート機300からは回答通信データは発信されないが、返答用のタイムスロットは全台数分用意される。中継器200は返答通信データR10〜R24を受信すると、補正後のGPS値を親機に伝えるべく中継通信データS10〜S24を親機100へ中継する。
【0056】
中継通信データS3は、前方カート情報を伝えるべきカート機300を5台毎に分けて、送信される。その結果、返答通信データR10〜R24は、中継通信データS3に対応する5台のカート機300毎に返送される。ゴルフ場に準備されるカート機300の全数が15台であると仮定した図9では、通信データS3は、3回に分けて送信される。この場合、周期T1は約6秒となる。
【0057】
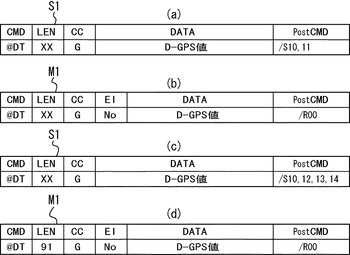
図10は、中継通信データS1及び同報通信データM1の一例を示すデータ構造図である。GPS補正値を含む中継通信データS1のデータ構造は、図10(a)及び(c)に示す通りである。親機100は、初めに図10(a)に示す中継通信データS1を送信し、次に、図10(c)に示す中継通信データS1を送信する。図10(a)の中継通信データS1は、中継器210及び211を中継すべき通信データである。一方、図10(c)の中継通信データS1は、中継器210、212、213及び214を中継すべき通信データである。
【0058】
図10(a)の中継通信データS1の先頭には、本通信の属性CMDについて、データ通信であることを示す“@DT”が書き込まれ、続いて本通信のデータ部分DATAのデータ長LENについて、例えばバイト単位の数値“XX”が16進数のASCIIコード表現形式(例えば、16進数の“F”をAXCIIコード“46”で表現する形式)で書き込まれている。次に制御コードCCとして、データ部分DATAがGPS補正値すなわちD−GPS値であることを示す“G”が書き込まれている。続くデータ部分DATAには、GPS補正値が書き込まれている。最後の経路指定情報PostCMDには、識別データが#10、#11である中継通信モデムユニットを中継経路とすべき旨を表す“/S10、11”が書き込まれている。一方、図10(c)の中継通信データS1は、経路指定情報PostCMDとして、識別データが#10、#12、#13、#14である中継通信モデムユニットを中継経路とすべき旨を表す“/S10、12、13、14”が書き込まれている点においてのみ、図10(a)の通信データS1と異なっている。
【0059】
中継器210〜214のマイクロコンピュータ230は、受信した中継通信データS1の経路指定情報PostCMDを解読することにより、当該中継通信データS1を中継すべきか否かを判断する。例えば、図10(a)の中継通信データS1を受信した中継器210は、自身のIDが#10であることから、“/S10、11”に基づいて、さらに中継すべきと判断する。図10(a)の中継通信データS1を受信した中継器211は、自身のIDが#11であることから、“/S10、11”に基づいて、中継の必要なしと判断する。
【0060】
図10(a)の中継通信データS1を受信した中継器210及び211は、同報通信データM1を発信する。図10(b)は、図10(a)の中継通信データS1を受信した中継器210及び211が発信する同報通信データM1のデータ構造を例示している。図10(b)の同報通信データM1は、発信する中継器の識別データEIが書き加えられ、経路指定情報PostCMDに、同報通信を示す“/R00”が書き込まれている点において、中継通信データS1とは異なっている。中継器識別データEIの数値Noは、例えば、中継器210、211の同報通信モデムユニット235の識別データIDの下一桁(中継通信モデムユニット231の識別データIDの下一桁と同一)で表される。この場合、中継器210のEIは“0”であり、中継器211のEIは“1”である。
【0061】
図10(c)の中継通信データS1を受信した中継器212〜214も、同報通信データM1を発信する。既に述べたとおり、中継器210は、先に同報通信データM1を発信しているため、重複して発信しない。図10(d)は、図10(c)の中継通信データS1を受信した中継器212〜214が発信する同報通信データM1のデータ構造を例示している。図10(d)の同報通信データM1は、中継器識別データEIの数値Noが異なる点を除いて、図10(b)の同報通信データM1と同一である。
【0062】
同報通信データM1の経路指定情報PostCMDが“/R00”であり、特定のカート機300又は携帯機400を指定していないため、何れのカート機300又は携帯機400のマイクロコンピュータ360、470も、同報通信データM1を取り込んで処理する。同報通信データM1を受信した後のカート機300及び携帯機400によるGPS補正値の扱いについては、既に述べた通りである。中継通信データS1及び同報通信データM1の送信に要する時間は、約1.5秒である。
【0063】
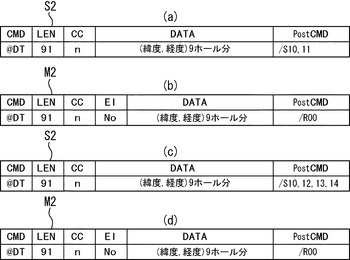
図11は、中継通信データS2及び同報通信データM2の一例を示すデータ構造図である。本日の18ホールのピン位置を含む中継通信データS2のデータ構造は、図11(a)及び(c)に示す通りである。図10(a)及び(c)の中継通信データS1と同様に、図11(a)の中継通信データS2は、中継器210及び211を中継すべき通信データであり、図11(c)の中継通信データS2は、中継器210、212、213及び214を中継すべき通信データである。データ部分DATAには、9ホール分の本日のピンの位置が緯度、経度で書き込まれる。制御コードCCには、当該9ホールが、IN(1〜9番ホール)、OUT(10〜18番ホール)の何れであるかを区別するための数値nが書き込まれる。数値nは、例えば、INであれば“0”であり、OUTであれば“1”である。従って、中継通信データS2は、同一の中継器に向けて、IN、OUT合わせて2回送信される。
【0064】
親機100の基地局ユニット130は、中継通信データS1と同様に、中継通信データS2を作成し、モデムユニット135に受け渡して送信させる。日によって変更される18ホールのピン位置は、当日に計測した値を、基地局ユニット130のメモリ(図示略)に記憶させることによって得られる。基地局ユニット130は、例えば、毎日午前のある時刻までに、中継通信データS2を送信し、その後はその日一杯送信しない。
【0065】
中継通信データS1と同様に、中継通信データS2を受信した中継器210〜214は、同報通信データM2を発信する。図11(b)は、図11(a)の中継通信データS2を受信した中継器210及び211が発信する同報通信データM2のデータ構造を例示し、図11(d)は、図11(c)の中継通信データS2を受信した中継器212〜214が発信する同報通信データM2のデータ構造を例示している。
【0066】
同報通信データM2を受信したカート機300のマイクロコンピュータ360は、本日のピンの位置を、例えばメモリ380に格納する。それにより、マイクロコンピュータ370は、表示器370にピン位置を絵図338で表示したり、ティーグラウンドからピンまでの距離334、335、336を算出して表示したり、自身の位置からピンまでの距離337を算出して表示したりする。同報通信データM2を受信した携帯機400のマイクロコンピュータ470も同様に、本日のピンの位置を計算や表示に用いる。なお、中継通信データS2及び同報通信データM2の送信に要する時間は、約1.5秒である。
【0067】
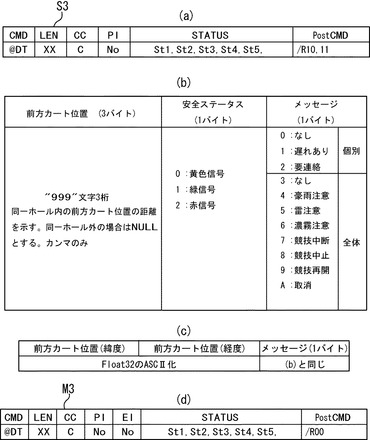
図12は、中継通信データS3及び同報通信データM3の一例を示すデータ構造図である。各カート機300の前方カート機300の状態を含む中継通信データS3のデータ構造は、図12(a)に示す通りである。図12(a)の中継通信データS3は、中継器210及び211を中継すべき通信データを例示している。中継器210、212〜214を中継すべき通信データS3については、図12(a)から自明であるので図示を略する。制御コードCCには、当該中継通信データS3が、各カート機300からの返答を要求するポーリングデータであることを示す“C”が書き込まれている。続くポーリング識別データPIには、複数回に分けて行われる中継通信データS3を識別する数値、すなわち複数回のポーリングを識別する数値Noが書き込まれている。ポーリング識別データPIは、例えば2バイトデータであり、カート機IDが例えば#100〜#114の範囲にあれば、#100〜#104、#105〜#109、及び#110〜#114のカート機のポーリングに、それぞれ、“64”、“69”及び“6E”が付与される。
【0068】
データ部分には、ポーリング識別データPIに対応する5台のカート機300のそれぞれの前方カート機300の状態STATUSを表す数値St1〜St5が書き込まれる。例えば、ポーリング識別データPIが“64”であれば、数値St1は、カート機IDが#100であるカート機300の前方カート機の状態を表現している。親機100の基地局ユニット130には、通信データS3に答えて各カート機300から、補正後の自身のGPS値が返送されるので、基地局ユニット130は、各カート機300の現在位置を認識することができる。基地局ユニット130は、各カート機300の現在位置に基づいて、全てのポーリング識別データPIに対応する数値St1〜St5を生成することができるのである。
【0069】
図12(b)は、数値St1〜St5の各々の内容を例示している。この例では、先頭3バイトは、対応するカート機300からその前方カート機300までの距離を表している。続く1バイトは、距離に基づいて安全性ステータス、すなわち安全性のレベルを表している。基地局ユニット130は、例えば計算した距離を、予めメモリに記憶される基準値と比較することによって、かかる安全性のレベルを判断することができる。最後の1バイトは、メッセージを表現している。当該メッセージは、基地局ユニット130の管理者が、ボタン操作等により入力する。
【0070】
図12(b)には、数値St1〜St5の各々の内容が、各カート機300からその前方カート機300までの距離と、当該距離に基づく安全性のレベルとを表す例を示した。これに対して、図12(c)に例示するように、数値St1〜St5の各々が、各カート機300の前方カート機300のGPS値を表すものであっても良い。GPS値は、緯度、経度に分けて書き込まれ、それぞれ、例えば32ビット浮動小数点の数値をASCIIコードで表現したものが用いられる。最後の1バイトのメッセージは、図12(b)のメッセージと同じである。
【0071】
図12(d)は、図12(a)の中継通信データS3を受信した中継器210及び211が発信する同報通信データM3のデータ構造を例示するものである。同報通信データM1、M2と同様に、同報通信データM3にも、発信する中継器の識別データEIが書き加えられている。各カート機300は、自身に付与されたカート機IDを認識し得るため、例えば3回に分けて送られる同報通信データM3の中から、適切なポーリング識別データPIに対応する数値St1〜St5の中の一つを、自身が取得すべきデータとして選択することが可能である。例えば、自身のカート機IDが“100”であるカート機300は、ポーリング識別データPIが“64”の同報通信データM3に含まれる前方カート機300の状態STATUSのうち、第1番目の数値St1を選択する。このように、中継通信データS3及び同報通信データM3には、各カート機300と、その前方カート機300の状態STATUSとの対応関係が、表されており、これに基づいて各カート機300は自身の前方カート機300の状態STATUSを取得することができる。
【0072】
前方カート機300の状態STATUSが図12(b)に例示されるものである場合には、同報通信データM3を受信したカート機300のマイクロコンピュータ360は、取得した状態STATUSの数値に基づいて、自身から前方カート機300までの距離、安全ステータス、及びメッセージを表示する。前方カート機300の状態STATUSが図12(c)に例示されるものである場合には、マイクロコンピュータ360は、自身のGPS値と、取得した状態STATUSに含まれる自身の前方カート機300のGPS値とに基づいて、自身から前方カート機300までの距離を算出し、さらに当該距離に基づいて安全ステータスを決定した上で、これらの距離、安全ステータスに加えてメッセージを表示する。同報通信データM3を受信した携帯機400のマイクロコンピュータ470も同様に、適切なポーリング識別データPIに対応する数値St1〜St5の中の一つを選び出し、自身に対応するカート機300から前方カート機300までの距離や、安全ステータス等を表示したり、あるいは計算、決定した上で表示したりすることができる。
【0073】
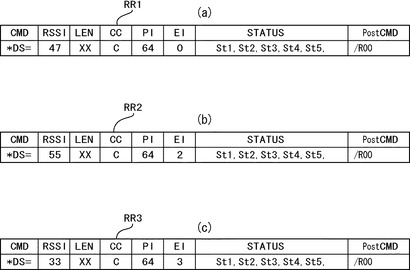
図13は、返答通信データR10〜R24、及び中継通信データS10〜S24の一例を示すデータ構造図である。同報通信データM3を受信したカート機300は、定められたタイムスロットに、返答通信データR10〜R24を発信する。図13(a)は、この返答通信データR10〜R24の構造を例示している。制御コードCCには、当該返答通信データR10〜R24が、各カート機300からの返答を伝えるものであることを示す“A”が書き込まれている。続く識別データEIには、返答を送るカート機300の識別データ、例えば#100が書き込まれる。次のデータ部分には、当該カート機300の補正後のGPS値が、緯度、経度に分けて書き込まれる。これらの緯度及び経度はそれぞれ、例えば32ビット浮動小数点の数値をASCIIコードで表現したものである。最後の経路指定情報PostCMDには、返答すべき同報通信元を指定する“/RXX”が書き込まれる。数値“XX”には、返答先である中継器200の識別データEIが書き込まれる。数値“XX”には、例えば、中継器200の同報通信モデムユニット235の識別データの下一桁、例えば当該識別データが“20”であれば“0”が付与される。返答先を選択する手順については後述する。
【0074】
カート機300のマイクロコンピュータ360は、このような返答通信データR10〜R24を作成し、モデムユニット365に受け渡す。モデムユニット365は、返答通信データR10〜R24を特定小電力無線に載せて発信する。発信された電波を受信した幾つかの中継器200のマイクロコンピュータ230は、受信した返答通信データR10〜R24に含まれる返答先“XX”が、自身の中継器識別データEIに一致しなければ、当該返答通信データR10〜R24を無視する。
【0075】
一方、返答先“XX”が、自身の中継器識別データEIに一致しておれば、マイクロコンピュータ230は、図13(b)に示す中継通信データS10〜S24を作成する。経路指定情報PostCMDとして、“/R Prog”が設定される。ここで“Prog”は、マイクロコンピュータ230が、自身の中継器識別データEIに応じて、中継すべき中継器200の識別データEIを指定するものである。中継器200の識別データEIとして、例えば中継通信モデムユニット231の識別データが用いられる。一例を挙げると、自身の中継器識別データEIが“13”である場合には、“Prog”として“12、10、01”が付与される。数値“01”は、親機100のモデムユニット135の識別データである。この中継通信データは、中継器213から中継器212、210を経て、親機100へ中継される。なお、中継通信データS3及び同報通信データM3の送信、及び返答通信データR10〜R24及び中継通信データS10〜S24の送信に要する時間は、約3秒である。
【0076】
次に、カート機300が返答通信データR10〜R24の返送先を中継器210〜214の中から選択する手順について説明する。図14は、同報通信データM3を受信したカート機300のモデムユニット365が、マイクロコンピュータ360へ受け渡す受信データの一例を示すデータ構造図である。図14の例では、同報通信データM3を受信するカート機300は、中継器212に最も近い位置にあるカート機305(図8参照)とし、中継器210、212、213から同報通信データM3を受信するものと仮定している。このため図14(a)〜(c)として図示するように、モデムユニット365がマイクロコンピュータ360に受け渡す受信データRR1〜RR3には、中継器識別データEIとして、中継器210、212、213の同報通信モデムユニット235の識別データEI“20”、“22”、“23”の下一桁が書き込まれている。
【0077】
モデムユニット365は、受信電波の強度を計測する回路(図示略)を有しており、計測した受信電波強度RSSIを同報通信データM3に付加して、受信データRR1〜RR3をマイクロコンピュータ360へ受け渡す。図14の例では、中継器210からの受信電波強度RSSIは“47”であり、中継器212については“55”であり、中継器213については“33”である。なお、モデムユニット365は、受信データRR1〜RR3の先頭には、本通信の属性CMDについて、受信電波強度RSSIを付加するモードであることを示す“*DS=”を書き込む。
【0078】
カート機305のマイクロコンピュータ360は、受信データRR1〜RR3を受け取ると、ポーリング識別データPIが、自身に対応するものである場合には、受信電波強度RSSIを比較し、最も高い受信電波強度RSSIに対応する中継器識別データEIを特定する。マイクロコンピュータ360は、特定した中継器識別データEIを返答先として、返答通信データRmn(mn=10〜24のいずれか)の返送先“/RXX”の数値“XX”に書き込む。これにより、受信強度の最も高い同報通信電波を発信した中継器212へ、返答通信データRmnが返送される。すなわち、十分な受信強度が得られた同報通信電波を発信した中継器212から親機100へ返信データが伝えられる。それにより親機100は、返答通信データRmnを誤りなく受け取ることが可能となる。
【0079】
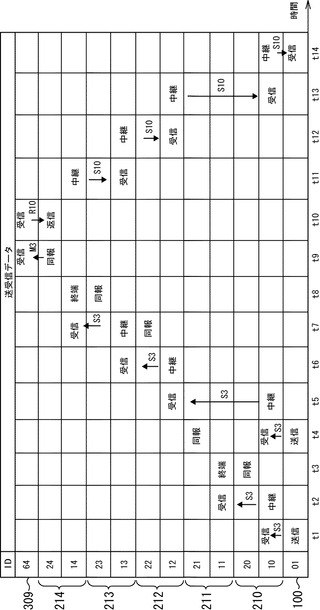
図15は、親機100、中継器210〜214、及びカート機301〜309の間で行われる通信のタイミング表である。図15に示すように、これらの通信は、予め設定された時間区間(タイムスロット)t1〜t14に従って行われる。図15では、周期T1(図9)のうち、親機100がポーリングデータである中継通信データS3を送信した後、これに応答して1台のカート機300から返送された中継通信データS10が、親機100に受信されるまでの時間区間t1、t2、・・・を例示している。
【0080】
時間区間t1では、親機100が中継通信データS3を発信する。この通信データS3は、中継器210及び211へ伝えるべきデータである。中継器210の中継通信モデムユニット231は、同時にこれを受信する。続く時間区間t2では、中継器210の中継通信モデムユニット231が中継通信データS3を発信し、中継器211の中継通信モデムユニット231がこれを受信する。
【0081】
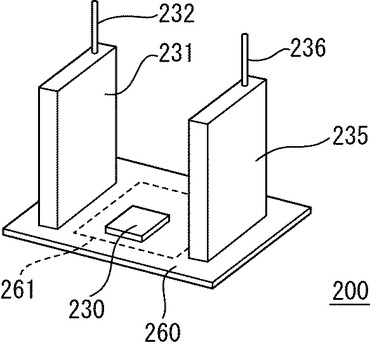
次の時間区間t3では、中継器210の同報通信モデムユニット235が同報通信データM3を発信する。中継器211は、もはや中継すべき先がないため、時間区間t3で受信した中継通信データS3を発信することはない。中継器210の中継通信モデムユニット231が中継のために発信する時間区間t2と、同じ中継器210の同報通信モデムユニット235が同報通信のために発信する時間区間時刻t3とは、重複しないように設定されている。これは、一方のモデムの発信電波が、他方のモデムの動作に干渉しないようにするためである。そうすることにより、図16に例示するように、各中継器200では、中継通信モデムユニット231と同報通信モデムユニット235とを、同一の回路基板260の同一主面上に、互いに近接させて設置することが可能となる。それにより、各中継器200をコンパクトに作り上げることが可能となる。回路基板260上には、マイクロコンピュータ230を含む制御ユニット261が展開される。
【0082】
図15に戻って、次の時間区間t4では、親機100が中継通信データS3を発信する。この通信データS3は、中継器210、212〜214へ伝えるべきデータである。中継器210の中継通信モデムユニット231は、同時にこれを受信する。このとき中継器211の同報通信モデムユニット235は、同報通信データM3を発信する。このように、中継通信の特定小電力無線周波数と、同報通信の特定小電力無線周波数とが異なっているために、双方の通信の間で混線を生じることなく、異なる中継器200の間で、中継通信と同報通信とを同時に行うことが可能となっている。それにより、システム全体の通信を迅速に行い、周期T1を短くすることができる。
【0083】
次の時間区間t5では、中継器210の中継通信モデムユニット231が中継通信データS3を発信し、中継器212の中継通信モデムユニット231がこれを受信する。続く時間区間t6では、中継器212の中継通信モデムユニット231が中継通信データS3を発信し、中継器213の中継通信モデムユニット231がこれを受信する。既に述べたように、中継器210の同報通信モデムユニット235は、時間区間t3で既に同報通信データM3を発信しているため、同報通信データM3を発信しない。それには、例えば中継器210のマイクロコンピュータ230が、中継器212へ中継すべき中継通信データについては同報通信しないように、プログラムしておくことで容易に実現し得る。
【0084】
次の時間区間t7では、中継器213の中継通信モデムユニット231が中継通信データS3を発信し、中継器214の中継通信モデムユニット231がこれを受信する。このとき中継器212の同報通信モデムユニット235は、同報通信データM3を発信する。続く時間区間t8では、中継器213の同報通信モデムユニット235が同報通信データM3を発信する。中継器214は、もはや中継すべき先がないため、時間区間t7で受信した中継通信データS3を発信することはない。次に時間区間t9では、中継器214の同報通信モデムユニット235が同報通信データM3を発信する。この同報通信データM3は、例えばポーリング識別データPIが“64”に対応する5台のカート機300の1つ、例えばカート機309により受信される。
【0085】
カート機309の識別データが、仮に#100であるとする。そうすると、続く時間区間t10では、カート機309は、返送通信データR10を発信する。この返送通信データR10が、返送先として仮に中継器214を指定したものとする。そうすると、返送通信データR10は、発信と同時に中継器214の同報通信モデムユニット235に受信される。
【0086】
次の時間区間t11では、中継器214の中継通信モデムユニット231が中継通信データS10を発信し、中継器213の中継通信モデムユニット231がこれを受信する。続く時間区間t12では、中継器213の中継通信モデムユニット231が中継通信データS10を発信し、中継器212の中継通信モデムユニット231がこれを受信する。続く時間区間t13では、中継器212の中継通信モデムユニット231が中継通信データS10を発信し、中継器210の中継通信モデムユニット231がこれを受信する。そして次の時間区間t14では、中継器210の中継通信モデムユニット231が中継通信データS10を発信し、親機100のモデムユニット135がこれを受信する。続く時間区間では、他のカート機から返答通信データR11が発信される(図示略)。以上のようにして、中継通信データS3によるポーリングとその返信が実現する。
【0087】
(5.距離等の計算手順)
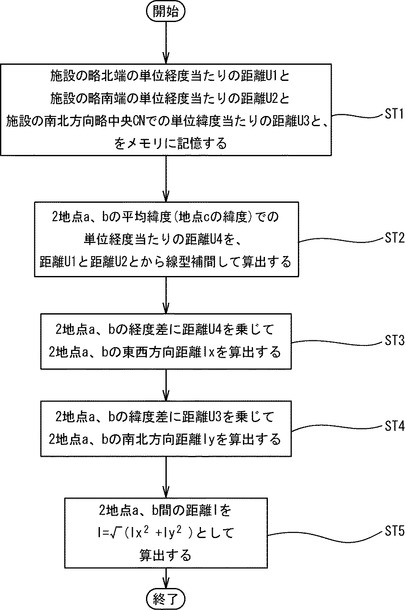
既に述べたように、親機100の基地局ユニット130は、各カート機300とその前方カート機300との間の距離を算出する。あるいは親機100に代えて、各カート機300のマイクロコンピュータ360が、自身とその前方カート機300との間の距離を算出したり、各携帯機400のマイクロコンピュータ470が、自身と、自身に対応するカート機300の前方カート機300との間の距離を算出したりする。また、カート機300のマイクロコンピュータ360、及び各携帯機400のマイクロコンピュータ470は、自身の位置からピンまでの距離を算出する。本実施の形態によるゴルフ場ナビゲーションシステムでは、かかる距離は図17のフローチャートに示す近似計算に従って算出される。それにより、短時間で精度の高い距離を得ることを可能にしている。基地局ユニット130、及びマイクロコンピュータ360、470は、図17のステップST2〜ST5を実行するようにプログラミングされ、それによりステップST2〜ST5の各々を実行する手段を実現する。
【0088】
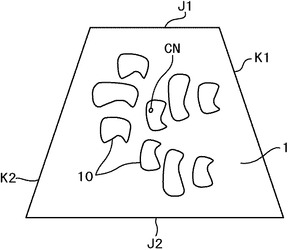
この近似計算では、図18に示すように、18個のホール10を有するゴルフ場1の施設の略北端に位置する緯度J1、略南端に位置する緯度J2、略東端に位置する経度K1、及び略西端に位置する経度K2を定める。図17に例示するように、4本の経緯度J1、J2、K1、K2で囲まれた領域がゴルフ場1を全て覆うように、これらの経緯度J1、J2、K1、K2を定めるのが、精度上望ましい。緯度J1、J2が定まると、緯度J1での単位経度当たりの距離U1、及び緯度J2での単位経度当たりの距離U2が定まる。また、緯度J1と緯度J2の中央付近CN、すなわち平均緯度付近CNでの単位緯度当たりの距離U3を定めることができる。これらの距離U1、U2及びU3は、例えば、電子地図を用いて人手により定めることができる。距離U1、U2及びU3が定まると、基地局ユニット130、マイクロコンピュータ360、470のメモリ(例えば、メモリ240など)に予め記憶しておく(図17のステップST1)。
【0089】
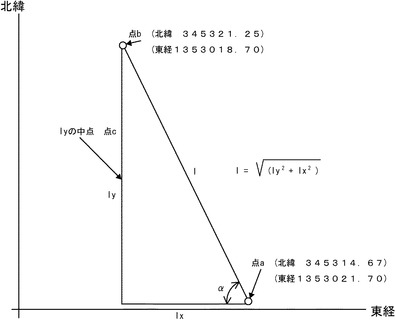
次に、図19に例示するように、緯度及び経度が既に分かっているゴルフ場10内の任意の地点a及び地点bの間の距離を、距離U1〜U3を用いて近似的に計算する。それには先ず、地点aの緯度と地点bの緯度との平均緯度、すなわち図19の地点cの緯度を計算する。地点cは、地点aを通る緯線と地点bを通る経線との交点と、地点bとを結ぶ線分ly(地点bを通る経線の一部)の中点である。次に、地点cにおける単位経度当たりの距離U4を、距離U1及びU2から線型補間することにより計算する(ステップST2)。すなわち、地点cの緯度が、緯度J1及びJ2をp:(1−p)の比率で分割する値であれば、距離U4は、(1−p)・U1+p・U2、により算出される。
【0090】
次に、2地点a、b間の経度差を計算し、当該経度差に、距離U4を乗じることにより、2地点a、b間の東西方向距離lxを算出する(ステップST3)。また、2地点a、b間の緯度差を計算し、当該緯度差に距離U3を乗じることにより、2地点a、b間の南北間距離lyを算出する(ステップST4)。ステップST3とST4との先後関係は任意である。次に、東西方向距離lxと南北方向距離lyとの自乗和の平方根を、2地点a、b間の距離lとして算出する(ステップST5)。以上の手順により、2地点a、b間の距離lが近似的に求められる。
【0091】
図3(b)を参照しつつ説明したとおり、携帯機400の画面431には、プレーヤの次の目標点465が表示される。図20は、かかる目標点465を計算し、表示する手順を示すフローチャートである。携帯機400のマイクロコンピュータ470は、図20のステップST12〜ST16を実行するようにプログラミングされ、それによりステップST12〜ST16の各々を実行する手段を実現する。
【0092】
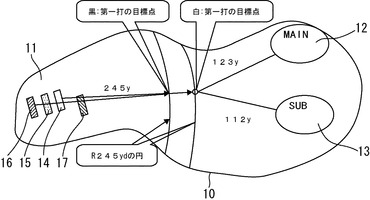
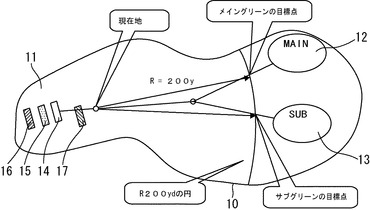
この手順では、図21に例示するような、ホール10内のティーグラウンド11上の第1打点からメイングリーン12及びサブグリーン13のピンまでの推奨コースが、ホール10の画像データ、ピンの位置と共に、携帯機400のメモリ483に予め記憶される(図20のステップST11)。推奨コースとして、例えば、折れ線を表現する一次方程式が記憶される。第1打点は、フロントティ14、レギュラーティ15、バックティ16、及びレディスティ17のうちの1以上である。メモリ483にはさらに、現在位置からピンまでの距離に応じた目標飛距離が予め記憶される(ステップST11)。目標飛距離は、例えば、現在位置からピンまでの距離がドライバーの飛距離(以下、245ydと仮定する)以上であれば当該飛距離245ydに定められ、当該飛距離245yd未満かつフェアウェイウッドの飛距離(以下、200ydと仮定する)以上であれば当該飛距離200ydに定められる。
【0093】
さらにメモリ483には、ある基準距離と、グリーン12,13上の所定位置とが予め記憶される(ステップST11)。基準距離として、例えばフェアウェイウッドの飛距離200ydが与えられる。また所定位置は、例えばグリーン上のピン、センタ、エッジのいずれかの位置である。
【0094】
メモリ483にこれらのデータが予め記憶されておれば、マイクロコンピュータ470は、目標地点の位置を計算することができる。それにはマイクロコンピュータ470はまず、補正後のGPS値に基づく自身の位置からピンまでの距離を算出する(ステップST12)。次に、マイクロコンピュータ470は、算出した距離を基準距離と比較する(ステップST13)。算出した距離が基準距離以上であれば、マイクロコンピュータ470は、補正後のGPS値に基づく自身の位置を中心とし、算出された距離に応じた目標飛距離を半径とする円と、推奨コースとの交点の位置を算出する(ステップST14)。
【0095】
図21の例では、自身の位置は、ティーグラウンド11にあるので、自身の位置からピンまでの距離は、245ys以上であり、かつ200ydに設定された基準距離以上である。このため、目標飛距離を245ydとして、ステップST14により交点の位置が算出されることとなる。一方、図22に示すように、第1打後の自身の位置(図中の現在地)からピンまでの距離は、245yd未満であり、かつ200ydに設定された基準距離以上である。このため、目標飛距離を200ydとして、同じくステップST14により交点の位置が算出されることとなる。
【0096】
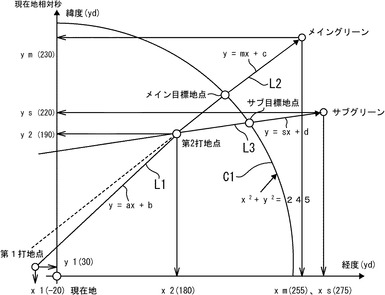
図23は、ステップST14の計算方法を座標上に表したグラフである。この例では、自身の位置(現在地)は、ティーグラウンド11の付近にあって、ピンまでの距離は245yd以上であると仮定している。それゆえ目標飛距離は245ydである。第1打点からメイングリーンまでの推奨コースが線分L1及びL2で表され、第1打点からサブグリーンまでの推奨コースが線分L1及びL3で表される。現在地を中心とする半径245ydの円C1と、線分L1、L2との交点として、メイン目標地点が求められる。また、現在地を中心とする半径245ydの円C1と、線分L1、L3との交点として、サブ目標地点が求められる。
【0097】
次に、マイクロコンピュータ470は、図21及び図22に例示するように、算出された交点の位置を目標地点として、推奨コースとともにホール10の絵地図に重ねて、画面431上に表示させる(ステップST15)。このとき、打ち出し方向も同時に表示される(図21、図22の矢印)。
【0098】
一方、ステップST13の判定において、算出した距離が基準距離未満であれば、マイクロコンピュータ470は、グリーン12、13上の所定位置、例えばピンの位置を目標地点として、推奨コースとともにホール10の絵地図に重ねて、画面431上に表示させる(ステップST16)。このとき、打ち出し方向も同時に表示される。
【0099】
図1及び図2を参照しつつ述べたように、カート機300は画面331上に、自身が現在あるホール番号等のホール情報333を表示し、同じく携帯機400は画面431上に、自身が現在あるホール番号432を表示する。図24は、このように自身が現在あるホール番号を特定し、表示する手順を示すフローチャートである。携帯機400を例に取ると、そのマイクロコンピュータ470は、図24のステップST22〜ST32を実行するようにプログラミングされ、それによりステップST22〜ST32の各々を実行する手段を実現する。
【0100】
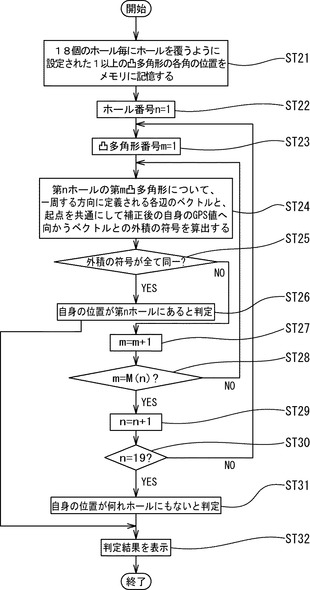
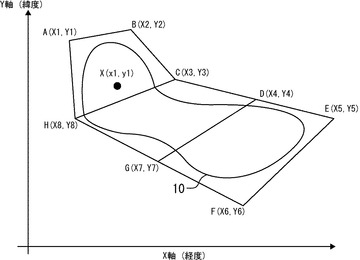
この手順では、図25に例示するように、各ホール10を覆うように、凸多角形(全ての内角が180°未満である三角形以上の多角形)を1以上設定する。図25には、3個の凸四角形で1つのホール10を覆う例を示している。そして、これら凸多角形の角の位置A(X1,Y1)〜H(X8,Y8)をメモリ483に予め記憶させておく(図24のステップST21)。同時に、各ホール10について、凸多角形の個数Mを記憶させておく。個数Mは、ホール10毎に異なっていても良い。
【0101】
メモリ483にこれらのデータが予め記憶されておれば、マイクロコンピュータ470は、携帯機400が何れのホール内にあるか、あるいは何れのホールにもないか、を判定し、表示することができる。それにはマイクロコンピュータ470はまず、制御変数であるホール番号nを“1”にリセットする(ステップST22)。続いて、制御変数である凸多角形番号mを“1”にリセットする(ステップST23)。次に、マイクロコンピュータ470は、第nホールの第m凸多角形について、一周する方向に定義される各辺のベクトルと、起点を共通にして補正後の自身のGPS値へ向かうベクトルとの外積の符号を計算する(ステップST24)。
【0102】
図25の例では、携帯機400の位置をX(x1,y1)で表している。第nホールの第m凸多角形が四角形ABCHであれば、ベクトルAB×ベクトルAX、ベクトルBC×ベクトルBX、ベクトルCH×ベクトルCX、及びベクトルHA×ベクトルHXが計算され、その符号が正であるか負であるかが判定される。ここで、記号「×」はベクトルの外積を表す。例えば、ベクトルAB×ベクトルAXは、(X2−X1)・(y1−Y1)−(Y2−Y1)・(x1−X1)と書き表すことができる。
【0103】
次に、第nホールの第m凸多角形について、外積の符号が全て同一であるか否かが判断される(ステップST25)。外積の符号が全て同一であれば、マイクロコンピュータ470は、携帯機400の位置が第nホールに存するものと判定し(ステップST26)、判定結果を画面431上に表示させる(ステップST32)。外積の符号が全て同一である訳ではない場合には、マイクロコンピュータ470は、凸多角形番号mをインクリメントし(ステップST27)、当該番号mが第nホールの凸多角形の個数M(n)に達しているか否かを判定する(ステップST28)。番号mが個数M(n)に達してなければ、新たな第m凸多角形について、ステップST24の処理が行われる(ステップST24)。番号mが個数M(n)に達しておれば、マイクロコンピュータ470は、ホール番号nをインクリメントし(ステップST29)、当該番号nがホール数18を超えているか否かを判定する(ステップST30)。
【0104】
番号nがホール数18を超えていなければ、凸多角形番号mがリセットされた上で(ステップST23)、ステップST24の処理が行われる(ステップST24)。一方、番号nがホール数18を超えておれば、マイクロコンピュータ470は、携帯機400の位置が何れのホールにもないと判定し(ステップST31)、判定結果を画面431上に表示させる(ステップST32)。以上の手順により、携帯機400の何れのホール10に存在するか、或いは何れのホール10にも存在しないかが、判定され、かつ表示される。また、携帯機400だけでなくカート機300についても、同様の処理が可能である。
【0105】
(6.その他の実施の形態)
(1)以上の実施の形態では、複数の中継器200の全てが中継通信と共に同報通信を行う例を示したが、一部の中継器200が中継通信のみを行うようにシステムを構成しても良い。
【0106】
(2)以上の実施の形態では、特定小電力無線によるゴルフ場ナビゲーションシステムを示したが、従来のゴルフ場ナビゲーションシステムとして使用されている業務無線によるシステムを廃棄することなく、音声通信として併用する形態を採ることも可能である。それにより、既に設置されている通信インフラを有効利用することができる。業務無線システムにおいても、クラブハウス等に親機が設置され、カート機、あるいは携帯機が子機として使用される。特定小電力無線システムと業務無線システムとは、独立して通信が行われるため、緊急時の音声通信が、特定小電力無線によるデータ通信とは無関係に即時に行い得る。
【0107】
(3)以上の実施の形態では、ゴルフ場で使用されるゴルフ場ナビゲーションシステムを示したが、本発明の施設内ナビゲーションシステムは、ゴルフ場以外に、テーマパーク、遊園地、工場などに使用することも可能である。
【0108】
(4)以上の実施の形態において、「GPS値」は、緯度情報及び経度情報を含んでおれば足りるが、さらに時間情報等をも含み、例えば、NMEA書式で表現されたものであっても良い。
【図面の簡単な説明】
【0109】
【図1】本発明の一実施の形態としてのゴルフ場ナビゲーションシステムに用いられるカート機を示す外観図である。
【図2】図1と同一のシステムに用いられる携帯機を示す外観図である。
【図3】図2の携帯機の画面に現れる別の表示内容を例示する画面図である。
【図4】図1と同一のシステムに使用される親機の構成例を示すブロック図である。
【図5】図1と同一のシステムに使用される中継器の構成例を示すブロック図である。
【図6】図1に外観を示したカート機の構成例を示すブロック図である。
【図7】図2に外観を示した携帯機の構成例を示すブロック図である。
【図8】図1と同一のシステムの全体構成の一例を示す概略図である。
【図9】図9のシステムにおける通信のシーケンス図である。
【図10】中継通信データS1及び同報通信データM1の一例を示すデータ構造図である。
【図11】中継通信データS2及び同報通信データM2の一例を示すデータ構造図である。
【図12】中継通信データS3及び同報通信データM3の一例を示すデータ構造図である。
【図13】返答通信データR10等及び中継通信データS10等の一例を示すデータ構造図である。
【図14】カート機のモデムユニットが、マイクロコンピュータへ受け渡す受信データの一例を示すデータ構造図である。
【図15】図9のシステムにおける通信のタイミング表である。
【図16】中継器の構成例を示す外観図である。
【図17】2地点間の距離を計算する手順を例示するフローチャートである。
【図18】図17の計算手順を説明するための説明図である。
【図19】図17の計算手順を説明するためのグラフである。
【図20】目標点の位置を計算する手順を例示するフローチャートである。
【図21】図20の計算手順を説明するための説明図である。
【図22】図20の計算手順を説明するための説明図である。
【図23】図20の計算手順を説明するためのグラフである。
【図24】現在地が何れのホールに位置するかを特定する手順を例示するフローチャートである。
【図25】図24の手順を説明するためのグラフである。
【符号の説明】
【0110】
1 ゴルフ場(施設)
10 ホール(特定区域)
11 ティーグラウンド
12、13、462、463 グリーン
100 親機
131、361、471 GPSユニット(GPS受信機)
200、210〜214 中継器
240、380、483 メモリ
300、301〜309 カート機(子機)
400、401〜404 携帯機(子機)
464 現在地(自身の位置)
465 目標点
S1〜S3、S10〜S24 中継通信データ
M1〜M3 同報通信データ
R10〜R24 返答通信データ
L1〜L3 推奨コース
C1 円
【技術分野】
【0001】
本発明は、例えばゴルフ場、テーマパーク、遊園地、工場などの施設内で使用される施設内ナビゲーションシステムに関する。
【背景技術】
【0002】
従来、この種の施設内ナビゲーションシステムとして、例えば特許文献1に開示されるものが知られている。この従来技術によるナビゲーションシステムは、ゴルフ場で使用されるものであり、クラブハウスに設けられたコントロールセンターと、各カートに搭載されたカート用子機と、各カートに対応する幾つかの携帯用子機とを備えている。コントロールセンターは、GPS(全地球測位システム)受信機を備えており、事前に計測されたGPS基準値と、GPS衛星からの電波により得られたGPS値との差分を、GPS補正値として算出し、無線により各カート用子機へ送信する。各カート用子機は、GPS受信機を備えており、送信されたGPS補正値を用いて自身のGPS値を補正する。それにより各カート用子機は、補正後のGPS値をコントロールセンターへ無線で返送するとともに、自身の位置からグリーンまでの距離を算出し、対応する携帯用子機へ無線で送信する。それにより、コントロールセンターの管理者は、各カートの位置を精度良く把握し得るとともに、携帯用子機の携行者すなわちプレーヤは、自身のカートの位置からグリーンまでの距離を、良好な精度で把握することが可能となっている。
【特許文献1】特許第3098743号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来においてこの種の施設内ナビゲーションシステムでは、業務無線が使用されており、その帯域はMHz帯域である。そのため通信速度が、例えば4,800bpsと低いものとなり、コントロールセンターからGPS補正値を送信したり、多数のカートからそれぞれのGPS値を、時間をずらして送信したりするのに時間を要する。さらに、GPS補正値やGPS値の他に、付加情報を伝えようとすれば、通信に要する時間はさらに長いものとなる。カートは移動するものであり、通信時間の遅れは、位置精度の低下につながる。また、各カート用子機にマイクを備え、データのみならず緊急時の音声連絡をコントロールセンターへ送ることができるように、システムを構築した場合、コントロールセンターが各カート用子機と行っている通常の通信が、全てのカート用子機を一巡するまで、音声通信が待たされることとなる。すなわち、緊急の音声連絡が円滑に行われない場合がある。
【0004】
本発明は上記の問題点に鑑みてなされたもので、短時間で通信を行う施設内ナビゲーションシステムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決し上記目的を達成するために、本発明のうち第1の態様に係るものは、施設内ナビゲーションシステムであって、特定小電力無線により通信する、親機と複数の中継器と可搬性の複数の子機とを備えている。そして、前記複数の中継器は、前記親機からの通信内容を順に伝えるとともに、前記複数の中継器の少なくとも一部は、前記通信内容を前記複数の子機に同報通信するものである。また、前記親機はGPS受信機を有しており、GPS基準値に対するGPS補正値を演算して前記通信内容として送信する。さらに、前記複数の子機の各々はGPS受信機を有しており、同報通信された前記GPS補正値を用いて自身のGPS値を補正する。また、前記複数の中継器の前記少なくとも一部は、前記親機及び前記複数の中継器の間でなされる中継通信とは異なる周波数で同報通信を行うものである。
【0006】
この構成によれば、複数の中継器を備えることにより、施設内での親機と複数の子機との間の無線通信が、データ通信速度が高く、免許、資格、届出を要せず簡便な短距離無線である特定小電力無線を使って実現する。各子機は、親機から送られるGPS補正値に基づいて、自身のGPS値を補正するので、精度の高いGPS値を取得できる。さらに、親機及び複数の中継器の間でなされる通信、すなわち中継通信とは異なる周波数で同報通信が行われるので、中継通信と同報通信の間の混線を生じることなく、中継通信と同報通信とを同時に行うことができる。それにより、複数の中継器を介した親機と複数の子機との間の通信に要する時間を短縮することができる。なお可搬性の子機は移動可能であれば足り、例えば、携帯電話機と同様にユーザが携帯可能なものであっても良く、ゴルフ場のカートに据えられたもののように、移動体に設置されたものであっても良い。
【0007】
本発明のうち第2の態様に係るものは、第1の態様に係る施設内ナビゲーションシステムであって、前記複数の中継器のうち、中継通信と同報通信とを行う各中継器は、通信時間が互いに重複しないようにこれらの通信を行うとともに、前記複数の中継器は、互いに異なる一部の中継器の間で、一方が中継通信を行う時間に重複して他方が同報通信を行うものである。
【0008】
この構成によれば、中継通信と同報通信との双方を行う中継器は、通信時間が互いに重複しないようにこれら双方の通信を行うので、互いの通信電波の影響を排しつつ、中継用の無線通信回路と同報通信用の無線通信回路とを同一基板の上に設置することが可能となる。同一の中継器については、中継通信と同報通信との時間重複を回避しつつも、異なる中継器の間では、中継通信と同報通信の通信時間が重複するものが存するので、複数の中継器を介した親機と複数の子機との間の通信に要する時間が短縮される。
【0009】
本発明のうち第3の態様に係るものは、第1または第2の態様に係る施設内ナビゲーションシステムであって、前記複数の子機の各々は、補正後の自身のGPS値を発信し、前記複数の中継器は、発信された前記GPS値を前記親機へ伝えるものである。
【0010】
この構成によれば、複数の子機から送られる補正後の各自のGPS値が、複数の中継器によって親機に伝えられるので、親機の管理者は、各子機の位置を把握することができる。
【0011】
本発明のうち第4の態様に係るものは、第3の態様に係る施設内ナビゲーションシステムであって、前記親機は、前記複数の子機のGPS値に基づいて、当該複数の子機の各々に対応づけられた1つの子機のGPS値を、当該対応関係とともに前記通信内容として送信するものである。
【0012】
この構成によれば、各子機は、同報通信を受信することにより、自身に対応付けられた別の子機のGPS値を把握できる。それにより各子機は、自身に対応付けられた別の子機の位置を表示することができ、さらには自身と、自身に対応付けられた別の子機との間の距離を算出し、表示することも可能となる。例えば、一定のコースを追い越しなしで順序よく回遊する施設、例えばゴルフ場において、子機のユーザ(例えばゴルフプレーヤ)は、自身に先行するユーザ(例えばゴルフプレーヤ)の位置を把握したり、当該ユーザとの距離を把握したりすることが可能となる。
【0013】
本発明のうち第5の態様に係るものは、第1ないし第4のいずれかの態様に係る施設内ナビゲーションシステムであって、同報通信データは、発信する中継器の識別データを含んでおり、前記複数の子機の各々は、受信電波の強度を計測する回路を有しており、返答を要する同報通信データを受信した場合、受信電波強度の最も高い電波を発信した中継器を前記識別データに基づいて特定し、特定された当該中継器から親機へ中継すべく中継経路を指示するデータを含めて返答データを発信するものである。
【0014】
この構成によれば、各子機は、受信強度の最も高い電波を発信した中継器、すなわち自身との間で最も電波の伝わり易い中継器を特定し、当該中継器から親機に伝えるべく、返答データを発信するので、十分な受信強度が得られた電波を発信した中継器から親機へ返答データが伝えられる。それにより親機は、返答データを誤りなく受け取ることが可能となる。
【0015】
本発明のうち第6の態様に係るものは、第1ないし第5のいずれかの態様に係る施設内ナビゲーションシステムであって、前記親機又は前記複数の子機の各々は、GPS値が得られている施設内の2地点間の距離を算出するものであり、施設の略北端の単位経度当たりの距離と、施設の略南端の単位経度当たりの距離と、施設の南北方向略中央での単位緯度当たりの距離と、を記憶するためのメモリを有している。前記親機又は前記複数の子機の各々はさらに、前記2地点の平均緯度での単位経度当たりの距離を、施設の略北端の単位経度当たりの距離と、略南端の単位経度当たりの距離とから線型補間して算出する手段を有し、前記2地点の経度差に、算出された前記平均緯度での単位経度当たりの距離を乗じて前記2地点の東西方向距離を算出する手段を有し、前記2地点の緯度差に、前記略中央での単位緯度当たりの距離を乗じて前記2地点の南北方向距離を算出する手段を有し、前記東西方向距離と前記南北方向距離との自乗和の平方根を、前記2地点間の距離として算出する手段を有している。
【0016】
この構成によれば、施設内の2地点間の距離、例えば、子機の現在位置と特定地点との間の距離、異なる子機の現在位置間の距離、あるいは2つの特定地点間の距離が得られる。さらに、施設の略北端の単位経度当たりの距離と、施設の略南端の単位経度当たりの距離と、施設の南北方向略中央での単位緯度当たりの距離とに基づく近似計算が用いられるので、2地点間の距離が精度良く、かつ短時間で得られる。子機が2地点間の距離を計算する場合には、メモリに記憶すべき基準となる各距離は、例えばRS232C等のインタフェースを通じて親機から各子機のメモリに予め書き込んでも良い。
【0017】
本発明のうち第7の態様に係るものは、第6の態様に係る施設内ナビゲーションシステムであって、前記複数の子機の各々は、施設内の特定地点のGPS値を記憶するためのメモリを有しており、当該メモリに記憶された前記特定地点のGPS値と、補正後の自身のGPS値とに基づいて、自身の位置と前記特定地点との間の距離を、前記2地点間の距離として算出して表示するものである。
【0018】
この構成によれば、各子機のユーザは、自身と特定地点との間の距離を把握することが可能となる。特定地点は、例えばゴルフ場において、各子機のユーザ(すなわちゴルフプレーヤ)が目標とすべきピンの位置に設定することができる。特定地点のGPS値は、例えばRS232C等のインタフェースを通じて親機から各子機のメモリに予め書き込んでも良く、親機から中継器を通じて各子機に通信内容として同報通信し、これを各子機がメモリに書き込んでも良い。
【0019】
本発明のうち第8の態様に係るものは、第1ないし第7のいずれかの態様に係る施設内ナビゲーションシステムであって、前記複数の子機の各々は、施設内に設けられた1以上の特定区域のいずれかに自身が存在するか否か、かつ存在する場合には何れに存在するかを表示するものであり、前記1以上の特定区域毎に当該特定区域を覆うように設定された1以上の凸多角形の各角の位置を記憶するためのメモリを有している。前記複数の子機の各々はさらに、任意の凸多角形について、一周する方向に定義される各辺のベクトルと、起点を共通にして補正後の自身のGPS値へ向かうベクトルとの外積の符号を算出する手段を有し、前記外積の符号が全て同一である凸多角形が存するか否かを判定する手段を有し、前記判定により、前記外積の符号が全て同一である凸多角形が存する場合に、当該凸多角形が覆う特定区域内に自身の位置が存在する旨を表示する手段を有している。
【0020】
この構成によれば、各子機のユーザは、施設内の1以上の特定区域の何れに自身が存在するか、あるいは何れにも存在しないかを把握することができる。しかも当該判断が、簡単なベクトル演算を使ってなされるので、精度の良い判断結果が短時間で得られる。施設内ナビゲーションシステムが、ゴルフ場ナビゲーションシステムである場合には、18個のホールを1以上の特定区域とすることができる。なお、本発明において「多角形」とは、三角形及び四角形をも含むものであり、「凸多角形」とは、全ての内角が180度より小さい多角形である。三角形は必然的に凸多角形となる。各凸多角形の各角の位置は、例えばRS232C等のインタフェースを通じて親機から各子機のメモリに予め書き込んでも良い。
【0021】
本発明のうち第9の態様に係るものは、第1ないし第8のいずれかの態様に係る施設内ナビゲーションシステムであって、かつ当該システムがゴルフ場ナビゲーションシステムであり、前記複数の子機の各々は、直線又は折れ線で表現された第1打点からピンまでの推奨コースと、自身の位置からピンまでの距離に応じた目標飛距離とを記憶するためのメモリを有している。前記複数の子機の各々はさらに、補正後のGPS値に基づく自身の位置からピンまでの距離を算出する手段を有し、補正後のGPS値に基づく前記自身の位置を中心とし、算出された前記距離に応じた前記目標飛距離を半径とする円と前記推奨コースとの交点の位置を算出する手段を有し、算出された前記交点の位置を目標地点として前記推奨コースとともに表示する手段を有している。
【0022】
この構成によれば、第1打点からピンまでの推奨コースと、補正後のGPS値に基づく自身の位置を中心とし目標飛距離を半径とする円との交点の位置が、目標地点として算出され、表示されるので、各子機のユーザ(すなわちゴルフプレーヤ)は、目標地点を把握することができる。しかも精度良く、かつ短時間で目標地点が得られる。なおメモリは、第1打点からピンまでの推奨コースの記憶内容として、例えば、推奨コースを表現する直線又は折れ線の方程式を規定する係数を記憶しても良い。一般に、推奨コースを一意に規定し得るデータを記憶すれば足りる。推奨コースと目標飛距離は、例えばRS232C等のインタフェースを通じて親機から各子機のメモリに予め書き込んでも良い。
【0023】
本発明のうち第10の態様に係るものは、第9の態様に係る施設内ナビゲーションシステムであって、前記複数の子機の各々は、基準距離とゴルフ場のグリーン上の所定位置とを記憶するためのメモリを有し、補正後のGPS値に基づく自身の位置からピンまでの前記距離を、前記基準距離と比較する手段を有している。そして、前記表示する手段は、前記比較により自身の位置からピンまでの前記距離が前記基準距離よりも小さい場合には、前記グリーン上の前記所定位置を目標地点として前記推奨コースとともに表示するものである。
【0024】
この構成によれば、自身の位置からピンまでの距離が基準距離よりも小さい場合には、グリーン上の所定位置が目標地点として表示されるので、プレーヤは自身の位置がグリーンに近くなったときには、グリーン内の所定位置を目標とすることができる。グリーン上の所定位置は、例えばピン、センタ、エッジのいずれかの位置である。なお、基準距離及び所定位置を記憶するメモリと、推奨コース及び目標飛距離を記憶するメモリとは、同一メモリの異なる記憶領域であっても良い。
【0025】
本発明のうち第11の態様に係るものは、第1ないし第10のいずれかの態様に係る施設内ナビゲーションシステムであって、別の親機と、当該別の親機と業務無線により音声通信する可搬性の別の複数の子機と、をさらに備えるものである。
【0026】
この構成によれば、別系統の音声通信システムを備えるので、各ユーザから親機への緊急連絡が即時に可能となる。また、既に設置されている業務無線設備を廃棄せずに利用することができる。
【発明の効果】
【0027】
以上のように本発明によれば、短時間で通信を行う施設内ナビゲーションシステムが実現する。
【発明を実施するための最良の形態】
【0028】
(1.子機の機能)
図1は、本発明の一実施の形態による施設内ナビゲーションシステムに用いられる子機の一例を示す外観図である。本実施の形態による施設内ナビゲーションシステムは、ゴルフ場ナビゲーションシステムとして具体化されており、図1に例示する子機は、ゴルフ場の顧客であるプレーヤを乗せてゴルフ場内を移動するカートに搭載されるカート機300である。カート機300は、GPS受信機(図示略)を有するとともに、クラブハウスに設置される親機と、ゴルフ場内の複数の中継器を介して特定小電力無線によりデータ通信を行う。特定小電力無線の周波数は、例えばGHz帯域であり、それにより通信速度を高め、通信を短時間で行うことを可能にしている。カート機300は、自身のGPS値等のデータを、親機へ送信することも可能である。親機も、GPS受信機を備えている。
【0029】
カート機300は、ケース330の前面に液晶表示器等の画面331を有している。画面331には、自身が現在あるホール番号等のホール情報333が表示されるとともに、当該ホールの絵地図332が表示される。絵地図332上には、カート機300自身の位置及びその前方カート機300の位置が、カートの絵図で表示される。画面331には、さらに、BT(バックティ)、RT(レギュラーティ)及びFT(フロントティ)からピンまでの距離334、335、336と、自身の位置からピンまでの距離337とが、ヤード単位で表示される。そのほか、本日の使用グリーンとピン位置が絵図338で表示され、カート機300から前方カートまでの距離339がヤード単位で表示される。また、現在時刻340及び経過時間341が、数値で表示される。ケース330の前面には、案内音声を出力するスピーカ350が設けられており、さらに表示内容の切り替え等のためのボタンスイッチ351が設けられている。
【0030】
図2は、同ゴルフ場ナビゲーションシステムに用いられる子機の別の一例を示す外観図である。当該子機は、ゴルフ場の顧客であるプレーヤが携行する携帯機400である。携帯機400も、カート機300と同様に、GPS受信機(図示略)を搭載するとともに、クラブハウスに設置される親機と、ゴルフ場内の複数の中継器を介して特定小電力無線によりデータ通信を行う。幾つかの携帯機400が、一つのカート機300に対応付けられている。但し携帯機400は、親機から送られる通信データを、カート機300を介することなく中継器から直接に受信する。
【0031】
携帯機400は、ケース430の前面に液晶表示器等の画面431を有している。画面431には、自身が現在あるホール番号432が表示されるとともに、GPS受信状況を示す絵図433及び特定小電力無線の受信状況を示す絵図434が表示される。画面431には、さらに、自身に対応付けられたカート機300が設置されるカートの番号435が数値で表示される。カート番号435は、携帯機400を携行するプレーヤが、搭乗すべきカートを誤らないように表示されるものである。なお、カートのボディ側面等にはカート番号が記されている。また画面431には、自身の位置からピンまでの距離436が、ヤード単位で表示されるほか、本日の使用グリーンとピン位置が絵図492で表示される。ケース430の前面にはさらに、表示内容の切り替え等のためのボタンスイッチ441、442、443が設けられている。
【0032】
図3は、プレーヤが切り替えることにより画面431に現れる別の表示内容を例示する画面図である。図3(a)の例では、電池の充電状態を示す絵図451、自身から自身に対応付けられたカート機300の前方カート機300までの距離452、当該距離452に基づく安全進行管理指示453、及び雷警報等の警報454が表示される。安全進行管理指示453として、安全を示す青丸記号、注意進行すべき旨を示す黄丸記号、及び待機すべき旨を示す赤丸記号が、距離452に応じて表示される。
【0033】
図3(b)の例では、自身が現在あるホール番号460が表示されるとともに、当該ホールの絵地図が表示される。絵地図上には、ティーグラウンド461、メイングリーン462、及びサブグリーン463が絵図で表示されるほか、ティーグラウンド461からメイン及びサブグリーン462、463までの推奨コースが表示される。絵地図上にはさらに、自身の位置464、及び次の目標点465が表示される。目標点465は、推奨コース上に表示される。
【0034】
(2.親機、中継器及び子機の構成)
図4は、本実施の形態によるゴルフ場ナビゲーションシステムに使用される親機の構成例を示すブロック図である。当該親機100は、クラブハウス等に設置されるもので、基地局ユニット130、GPS受信機131、GPSアンテナ132、特定小電力無線モデムユニット135、及び通信アンテナ136を有している。GPS受信機131は、精度の高い高性能GPSユニットであり、GPSアンテナ132を通じてGPS衛星からの電波を受信することにより、自身のGPS値を取得する。GPS受信機131には、また、予め計測された自身のGPS基準値が基地局ユニット130から送られる。そしてGPS受信機131は、取得した自身のGPS値のGPS基準値からの誤差を、GPS補正値として算出する。基地局ユニット130は、例えばパーソナルコンピュータとして構成されており、GPS基準値を、例えばハードディスク等の記憶装置に格納している。基地局ユニット130は、電源が投入されOS(オペレーティングシステム)が立ち上がると、GPS基準値をGPS受信機131へ送る。GPS受信機131で算出されたGPS補正値は、RS232C等のインタフェース133を通じて基地局ユニット130に伝えられる。
【0035】
基地局ユニット130は、受け取ったGPS補正値を、中継器の経路を指定して、モデムユニット135へ受け渡す。基地局ユニット130とモデムユニット135との間の通信は、RS232C等のインタフェース137を通じて行われる。モデムユニット135は、GPS補正値と中継器の経路指定情報を受け取ると、特定小電力無線に載せて当該通信データを通信アンテナ136より発信する。
【0036】
基地局ユニット130には、RS232C等のインタフェース141を通じて、カート機300、携帯機400などの子機、及び中継器などの外部機器140を接続することも可能である。それにより、これらの子機及び中継器に、データ或いはプログラムを供給することが可能となっている。例えば、各ホールの絵地図332、カート番号435、ピン等のGPS値、及び推奨コースのデータ、子機の識別データ(ID)などを、インタフェース141を通じて子機に供給することが可能である。特に、携帯機400に付与されるカート番号435及び識別データ(ID)は、新たなプレーヤに携帯機400を手渡す毎に書き換えることにより、少ない個数の携帯機400を効率よく使い回しすることが可能となる。また、基地局ユニット130は、LCD等の表示器(図示略)を有しており、例えば、自身が内蔵するメモリ(図示略)に記憶しているゴルフ場全体の絵地図データと、受け取ったGPS補正値とに基づいて、絵地図上に、各カート機300の位置を表示することも可能となっている。
【0037】
図5は、本実施の形態によるゴルフ場ナビゲーションシステムに使用される中継器の構成例を示すブロック図である。当該中継器200は、ゴルフ場内に設置されるもので、マイクロコンピュータ230、フラッシュROM等のメモリ240、中継通信モデムユニット231、中継通信アンテナ232、同報通信モデムユニット235、及び同報通信アンテナ236を有している。マイクロコンピュータ230及びメモリ240は、演算を行うとともに2つのモデムユニット231、235とデータをやり取りする制御ユニットの主要部をなすものである。制御ユニットとモデムユニット231、235とは、それぞれUART等のインタフェース233、237を通じてデータ通信を行う。制御ユニット及びモデムユニット231、235の電源は、太陽電池250により供給される電力をバッテリー251に蓄え、さらにコンバータ252により所定の電圧に調整することにより供給される。また、制御ユニットには、管理者が様々な設定を可能にするスイッチ群253が接続されている。メモリ240には、例えば中継器200自身の識別データ(ID)が記憶される。
【0038】
中継通信モデムユニット231は、親機100あるいは他の中継器200からの特定小電力無線を、中継通信アンテナ132を通じて受信し、復調することにより、GPS補正値等の通信データを取得する。取得した通信データは、インタフェース233を通じてマイクロコンピュータ230へ伝えられる。マイクロコンピュータ230は、受け取った通信データに付されている経路指定情報を解読し、他の中継器又は親機100へ中継すべきものであれば、この通信データを中継通信モデムユニット231へ送る。中継通信モデムユニット231は、この通信データを特定小電力無線に載せて、中継通信アンテナ232から発信する。発信された電波は、他の中継器の中継通信アンテナ232、又は親機100の通信アンテナ136により受信されることにより、中継が実現する。
【0039】
マイクロコンピュータ230はさらに、中継通信モデムユニット231から受け取った通信データの経路指定情報に基づいて、カート機300及び携帯機400へ同報通信すべきものか否かを判断し、同報通信すべきものであれば、経路指定情報として同報通信を指定する情報を書き込み、さらに自身の識別データ(ID)を付して、通信データを同報通信モデムユニット235へ受け渡す。同報通信モデムユニット235は、受け取った通信データを特定小電力無線に載せて、同報通信アンテナ236から発信する。当該通信データは、電波の届く範囲にある全てのカート機300及び携帯機400によって受信される。このように中継器200を中継することにより、親機100からカート機300及び携帯機400へ、通信データが送られる。
【0040】
同報通信モデムユニット235は、また、カート機300からの特定小電力無線を、同報通信アンテナ236を通じて受信し、復調することにより、カート機300のGPS値等の通信データを取得する。取得した通信データは、インタフェース237を通じてマイクロコンピュータ230へ伝えられる。マイクロコンピュータ230は、受け取った通信データに付されている経路指定情報を解読し、他の中継器又は親機100へ中継すべきものであれば、この通信データを中継通信モデムユニット231へ送る。中継通信モデムユニット231は、この通信データを特定小電力無線に載せて、中継通信アンテナ232から発信する。中継通信アンテナ232から発信された電波は、他の中継器の中継通信アンテナ232、又は親機100の通信アンテナ136により受信される。このように中継器200を中継することにより、カート機300から親機100へ、通信データが送られる。
【0041】
図6は、図1に外観を示したカート機300の構成例を示すブロック図である。カート機300は、マイクロコンピュータ360、フラッシュROM等のメモリ380、省電力GPSユニットであるGPS受信機361、GPSアンテナ362、特定小電力無線モデムユニット365、通信アンテナ366、及びTFTモニタである表示器370を有している。マイクロコンピュータ360及びメモリ380は、演算を行うとともに2つのユニット361、365及び表示器370とデータをやり取りする制御ユニットの主要部をなすものである。制御ユニットとGPS受信機361及びモデムユニット365とは、それぞれUART等のインタフェース363、367を通じてデータ通信を行う。マイクロコンピュータ360その他の電源は、例えば充電式のバッテリー375により供給される電力を、コンバータ376により所定の電圧に調整することにより供給される。
【0042】
GPS受信機361は、GPSアンテナ362を通じてGPS衛星からの電波を受信することにより自身のGPS値を取得し、マイクロコンピュータ360に伝える。一方、モデムユニット365は、中継器200からの特定小電力無線を、通信アンテナ366を通じて受信し、復調することにより、同報通信されたGPS補正値等の通信データを取得する。取得した通信データは、マイクロコンピュータ360へ伝えられる。マイクロコンピュータ360は、通信データがGPS補正値を含んでおれば、GPS受信機363から伝えられたGPS値を、GPS補正値により補正する。
【0043】
マイクロコンピュータ360は、補正後のGPS値を用いて、表示器370の画面331(図1)に、自身の位置を表示させたり、自身の位置からピンまでの距離を演算し、表示させたりする。マイクロコンピュータ360はさらに、補正後のGPS値を通信データに含めて、経路指定情報を書き込み、さらに自身の識別データ(ID)を付して、モデムユニット365へ送る。モデムユニット365は、この通信データを特定小電力無線に載せて、中継通信アンテナ366から発信する。発信された電波は、中継器200の中継通信アンテナ232、又は親機100の通信アンテナ136により受信される。それにより、カート機300からの通信データが親機100へ届けられる。
【0044】
図7は、図2に外観を示した携帯機400の構成例を示すブロック図である。携帯機400は、カート機300と類似の構成を採っており、マイクロコンピュータ470、フラッシュROM等のメモリ483、省電力GPSユニットであるGPS受信機471、GPSアンテナ472、特定小電力無線モデムユニット475、通信アンテナ476、及びカラー液晶モニタである表示器480を有している。マイクロコンピュータ470及びメモリ483は、演算を行うとともに、2つのユニット471、475及び表示器480とデータをやり取りする制御ユニットの主要部をなすものである。制御ユニットとGPS受信機471及びモデムユニット475とは、それぞれUART等のインタフェース473、477を通じてデータ通信を行う。マイクロコンピュータ470その他の電源は、例えば充電式のニッケル水素バッテリー486により供給される電力を、コンバータ487により所定の電圧に調整することにより供給される。
【0045】
GPS受信機471は、GPS受信機361と同様に、GPSアンテナ472を通じてGPS衛星からの電波を受信することにより自身のGPS値を取得し、マイクロコンピュータ470に伝える。またモデムユニット475は、モデムユニット365と同様に、中継器200からの特定小電力無線を、通信アンテナ476を通じて受信し、復調することにより、同報通信されたGPS補正値等の通信データを取得する。取得した通信データは、マイクロコンピュータ470へ伝えられる。マイクロコンピュータ470は、通信データがGPS補正値を含んでおれば、GPS受信機471から伝えられたGPS値を、GPS補正値により補正する。
【0046】
マイクロコンピュータ470は、補正後のGPS値を用いて、表示器480の画面431(図2、図3)に、自身の位置を表示させたり、自身の位置からピンまでの距離を演算し、表示させたりする。携帯機400は、カート機300とは異なり、補正後のGPS値を親機100へ送る機能を要しない。
【0047】
(3.システムの全体構成)
図8は、本実施の形態によるゴルフ場ナビゲーションシステムの全体構成を例示する概略図である。この構成例では、施設としてのゴルフ場1のクラブハウス(図示略)内に親機100が設置され、ゴルフ場1内の所々に5台の中継器210〜214が設置されている。またゴルフ場1内には、例えば9台のカート501〜509が使用中であり、カート機301〜309がそれぞれ搭載されている。また、カート501〜509の各々の近辺では、それぞれカート機301〜309に対応付けられた携帯機を携行するプレーヤ(図示略)がプレー中である。図8には、全てのカート機301〜309を代表して、カート機306に対応付けられた携帯機401〜404のみを例示している。カート機301〜309の各々は、図1及び図6に示したカート機300と同一である。また、携帯機401〜404の各々は、図2、図3及び図7に示した携帯機400と同一である。なお、カート機301〜309を代表してカート機300と適宜記載し、携帯機401〜404を代表して携帯機400と適宜記載する。
【0048】
図8の例では、親機100から子機、すなわちカート機301〜309及び携帯機401〜404へ通信データを送る場合には、中継経路P1及びP2に沿って、中継器210及び中継器211へ通信データが順に送られる。そして、中継器210及び211のそれぞれが、通信データを同報通信する。次に、中継経路P3、P4、P5及びP6に沿って親機100から中継器210、212〜214へ通信データが順に送られる。そして、中継器212〜214のそれぞれが、通信データを同報通信する。このとき中継器210は、先に同報通信を終えているので、重複を避けるために同報通信しない。カート機301〜309及び携帯機401〜404は、受信可能な範囲内にある中継器210〜214から同報通信を受信する。
【0049】
カート機301〜309から親機へ通信データを送る場合には、カート機301〜309は、受信強度の最も高い電波を発信した中継器を指定して通信データを発信する。中継器210〜214のうち指定された中継器は、通信データを受信し、経路P1,P2又は経路P3〜P6を逆に辿るように通信データを中継し、親機100へ届ける。
【0050】
親機100、中継器210〜214、カート機301〜309及び携帯機401〜404の各々のモデムユニットには、識別データ(ID)が割り当てられている。図8の例では、親機100の特定小電力無線モデムユニット135には、IDとして#1が付与されている。また、中継器210〜214の中継通信モデムユニット231には、それぞれIDとして#10〜#14が付与されている。さらに中継器210〜214の同報通信モデムユニット235には、それぞれIDとして#20〜#24(図示略)が付与されている。また、カート機301〜309には、それぞれIDとして例えば#100〜#114のうちのいずれかが付与されている。携帯機401〜404には、対応するカート機306のIDと同一のIDが付与される。このようにIDを共通にすることにより、各携帯機400はいずれかのカート機300と対応付けられる。携帯機401〜404のIDは、既に述べた通り、カート番号435と同様に親機100の基地局ユニット130によって、使用の度に入力される。
【0051】
親機100と中継器210〜214との間の通信、すなわち中継通信には、例えば1.252GHzの特定小電力無線が使用される。これに対して、中継器210〜214からカート機301〜309及び携帯機401〜404への同報通信、及びカート機301〜309及び携帯機401〜404から中継器210〜214への返答通信には、例えば1.216GHzの特定小電力無線が使用される。このように、親機100と中継器210〜214との間の通信と、中継器210〜214とカート機301〜309及び携帯機401〜404との間の通信とは、何れも特定小電力無線を使用しつつも、周波数を異ならせて使用する。従って、親機100の特定小電力無線モデムユニット135、及び中継器200(210〜214)の中継通信モデムユニット231は、1.252GHzの特定小電力無線で通信を行う。また、中継器200(210〜214)のの同報通信モデムユニット235、カート機300(301〜309)の特定小電力無線モデムユニット365、及び、携帯機400(401〜404)の特定小電力無線モデムユニット475は、1.216GHzの特定小電力無線で通信を行う。
【0052】
このように中継通信と同報通信との間で無線周波数を異ならせることにより、中継通信と同報通信の間で混線を生じることなく、中継通信と同報通信とを同時に行うことが可能となる。それにより、複数の中継器210〜214を介して行われる親機100と複数のカート機301〜309及び携帯機401〜404との間の通信に要する時間を短縮することが可能となる。
【0053】
(4.システムの動作)
図9は、親機100、中継器200、カート機300及び携帯機400の間で行われる通信のシーケンス図である。図において、中継器210〜214を単一の中継器200で代表し、カート機301〜309を単一のカート機300で代表し、さらに携帯機401〜404を単一の携帯機400で代表している。データ通信は反復して行われるものであり、図9には周期T1の間の通信シーケンスを例示している。
【0054】
周期T1の間に、親機100は、3種類の中継通信データS1〜S3を送信する。中継通信データS1は、GPS補正値を伝えるための通信データであり、中継通信データS2は、本日の18ホールのピン位置を伝えるための通信データである。また、中継通信データS3は、各カート機300の前方カート機300の状態を伝えるとともに、各カート機300からそれぞれの補正後のGPS値の返送を要求する通信データであり、一種のポーリングを行うものである。各中継器200は、中継通信データS1〜S3を受信すると、同報通信データM1〜M3を発信する。同報通信データM1〜M3は、各カート機300及び携帯機400のそれぞれによって受信される。携帯機400は、対応するカート機300を介して同報通信データM1〜M3を受信するのではなく、カート機300と同様に、中継器200から直接に受信する。
【0055】
各カート機300は、同報通信データM3を受信すると、補正後の自身のGPS値を返答すべく返答通信データR10〜R24を発信する。図9では、ゴルフ場に準備されたカート機300の全数は、15台であると仮定している。稼働中でないカート機300からは回答通信データは発信されないが、返答用のタイムスロットは全台数分用意される。中継器200は返答通信データR10〜R24を受信すると、補正後のGPS値を親機に伝えるべく中継通信データS10〜S24を親機100へ中継する。
【0056】
中継通信データS3は、前方カート情報を伝えるべきカート機300を5台毎に分けて、送信される。その結果、返答通信データR10〜R24は、中継通信データS3に対応する5台のカート機300毎に返送される。ゴルフ場に準備されるカート機300の全数が15台であると仮定した図9では、通信データS3は、3回に分けて送信される。この場合、周期T1は約6秒となる。
【0057】
図10は、中継通信データS1及び同報通信データM1の一例を示すデータ構造図である。GPS補正値を含む中継通信データS1のデータ構造は、図10(a)及び(c)に示す通りである。親機100は、初めに図10(a)に示す中継通信データS1を送信し、次に、図10(c)に示す中継通信データS1を送信する。図10(a)の中継通信データS1は、中継器210及び211を中継すべき通信データである。一方、図10(c)の中継通信データS1は、中継器210、212、213及び214を中継すべき通信データである。
【0058】
図10(a)の中継通信データS1の先頭には、本通信の属性CMDについて、データ通信であることを示す“@DT”が書き込まれ、続いて本通信のデータ部分DATAのデータ長LENについて、例えばバイト単位の数値“XX”が16進数のASCIIコード表現形式(例えば、16進数の“F”をAXCIIコード“46”で表現する形式)で書き込まれている。次に制御コードCCとして、データ部分DATAがGPS補正値すなわちD−GPS値であることを示す“G”が書き込まれている。続くデータ部分DATAには、GPS補正値が書き込まれている。最後の経路指定情報PostCMDには、識別データが#10、#11である中継通信モデムユニットを中継経路とすべき旨を表す“/S10、11”が書き込まれている。一方、図10(c)の中継通信データS1は、経路指定情報PostCMDとして、識別データが#10、#12、#13、#14である中継通信モデムユニットを中継経路とすべき旨を表す“/S10、12、13、14”が書き込まれている点においてのみ、図10(a)の通信データS1と異なっている。
【0059】
中継器210〜214のマイクロコンピュータ230は、受信した中継通信データS1の経路指定情報PostCMDを解読することにより、当該中継通信データS1を中継すべきか否かを判断する。例えば、図10(a)の中継通信データS1を受信した中継器210は、自身のIDが#10であることから、“/S10、11”に基づいて、さらに中継すべきと判断する。図10(a)の中継通信データS1を受信した中継器211は、自身のIDが#11であることから、“/S10、11”に基づいて、中継の必要なしと判断する。
【0060】
図10(a)の中継通信データS1を受信した中継器210及び211は、同報通信データM1を発信する。図10(b)は、図10(a)の中継通信データS1を受信した中継器210及び211が発信する同報通信データM1のデータ構造を例示している。図10(b)の同報通信データM1は、発信する中継器の識別データEIが書き加えられ、経路指定情報PostCMDに、同報通信を示す“/R00”が書き込まれている点において、中継通信データS1とは異なっている。中継器識別データEIの数値Noは、例えば、中継器210、211の同報通信モデムユニット235の識別データIDの下一桁(中継通信モデムユニット231の識別データIDの下一桁と同一)で表される。この場合、中継器210のEIは“0”であり、中継器211のEIは“1”である。
【0061】
図10(c)の中継通信データS1を受信した中継器212〜214も、同報通信データM1を発信する。既に述べたとおり、中継器210は、先に同報通信データM1を発信しているため、重複して発信しない。図10(d)は、図10(c)の中継通信データS1を受信した中継器212〜214が発信する同報通信データM1のデータ構造を例示している。図10(d)の同報通信データM1は、中継器識別データEIの数値Noが異なる点を除いて、図10(b)の同報通信データM1と同一である。
【0062】
同報通信データM1の経路指定情報PostCMDが“/R00”であり、特定のカート機300又は携帯機400を指定していないため、何れのカート機300又は携帯機400のマイクロコンピュータ360、470も、同報通信データM1を取り込んで処理する。同報通信データM1を受信した後のカート機300及び携帯機400によるGPS補正値の扱いについては、既に述べた通りである。中継通信データS1及び同報通信データM1の送信に要する時間は、約1.5秒である。
【0063】
図11は、中継通信データS2及び同報通信データM2の一例を示すデータ構造図である。本日の18ホールのピン位置を含む中継通信データS2のデータ構造は、図11(a)及び(c)に示す通りである。図10(a)及び(c)の中継通信データS1と同様に、図11(a)の中継通信データS2は、中継器210及び211を中継すべき通信データであり、図11(c)の中継通信データS2は、中継器210、212、213及び214を中継すべき通信データである。データ部分DATAには、9ホール分の本日のピンの位置が緯度、経度で書き込まれる。制御コードCCには、当該9ホールが、IN(1〜9番ホール)、OUT(10〜18番ホール)の何れであるかを区別するための数値nが書き込まれる。数値nは、例えば、INであれば“0”であり、OUTであれば“1”である。従って、中継通信データS2は、同一の中継器に向けて、IN、OUT合わせて2回送信される。
【0064】
親機100の基地局ユニット130は、中継通信データS1と同様に、中継通信データS2を作成し、モデムユニット135に受け渡して送信させる。日によって変更される18ホールのピン位置は、当日に計測した値を、基地局ユニット130のメモリ(図示略)に記憶させることによって得られる。基地局ユニット130は、例えば、毎日午前のある時刻までに、中継通信データS2を送信し、その後はその日一杯送信しない。
【0065】
中継通信データS1と同様に、中継通信データS2を受信した中継器210〜214は、同報通信データM2を発信する。図11(b)は、図11(a)の中継通信データS2を受信した中継器210及び211が発信する同報通信データM2のデータ構造を例示し、図11(d)は、図11(c)の中継通信データS2を受信した中継器212〜214が発信する同報通信データM2のデータ構造を例示している。
【0066】
同報通信データM2を受信したカート機300のマイクロコンピュータ360は、本日のピンの位置を、例えばメモリ380に格納する。それにより、マイクロコンピュータ370は、表示器370にピン位置を絵図338で表示したり、ティーグラウンドからピンまでの距離334、335、336を算出して表示したり、自身の位置からピンまでの距離337を算出して表示したりする。同報通信データM2を受信した携帯機400のマイクロコンピュータ470も同様に、本日のピンの位置を計算や表示に用いる。なお、中継通信データS2及び同報通信データM2の送信に要する時間は、約1.5秒である。
【0067】
図12は、中継通信データS3及び同報通信データM3の一例を示すデータ構造図である。各カート機300の前方カート機300の状態を含む中継通信データS3のデータ構造は、図12(a)に示す通りである。図12(a)の中継通信データS3は、中継器210及び211を中継すべき通信データを例示している。中継器210、212〜214を中継すべき通信データS3については、図12(a)から自明であるので図示を略する。制御コードCCには、当該中継通信データS3が、各カート機300からの返答を要求するポーリングデータであることを示す“C”が書き込まれている。続くポーリング識別データPIには、複数回に分けて行われる中継通信データS3を識別する数値、すなわち複数回のポーリングを識別する数値Noが書き込まれている。ポーリング識別データPIは、例えば2バイトデータであり、カート機IDが例えば#100〜#114の範囲にあれば、#100〜#104、#105〜#109、及び#110〜#114のカート機のポーリングに、それぞれ、“64”、“69”及び“6E”が付与される。
【0068】
データ部分には、ポーリング識別データPIに対応する5台のカート機300のそれぞれの前方カート機300の状態STATUSを表す数値St1〜St5が書き込まれる。例えば、ポーリング識別データPIが“64”であれば、数値St1は、カート機IDが#100であるカート機300の前方カート機の状態を表現している。親機100の基地局ユニット130には、通信データS3に答えて各カート機300から、補正後の自身のGPS値が返送されるので、基地局ユニット130は、各カート機300の現在位置を認識することができる。基地局ユニット130は、各カート機300の現在位置に基づいて、全てのポーリング識別データPIに対応する数値St1〜St5を生成することができるのである。
【0069】
図12(b)は、数値St1〜St5の各々の内容を例示している。この例では、先頭3バイトは、対応するカート機300からその前方カート機300までの距離を表している。続く1バイトは、距離に基づいて安全性ステータス、すなわち安全性のレベルを表している。基地局ユニット130は、例えば計算した距離を、予めメモリに記憶される基準値と比較することによって、かかる安全性のレベルを判断することができる。最後の1バイトは、メッセージを表現している。当該メッセージは、基地局ユニット130の管理者が、ボタン操作等により入力する。
【0070】
図12(b)には、数値St1〜St5の各々の内容が、各カート機300からその前方カート機300までの距離と、当該距離に基づく安全性のレベルとを表す例を示した。これに対して、図12(c)に例示するように、数値St1〜St5の各々が、各カート機300の前方カート機300のGPS値を表すものであっても良い。GPS値は、緯度、経度に分けて書き込まれ、それぞれ、例えば32ビット浮動小数点の数値をASCIIコードで表現したものが用いられる。最後の1バイトのメッセージは、図12(b)のメッセージと同じである。
【0071】
図12(d)は、図12(a)の中継通信データS3を受信した中継器210及び211が発信する同報通信データM3のデータ構造を例示するものである。同報通信データM1、M2と同様に、同報通信データM3にも、発信する中継器の識別データEIが書き加えられている。各カート機300は、自身に付与されたカート機IDを認識し得るため、例えば3回に分けて送られる同報通信データM3の中から、適切なポーリング識別データPIに対応する数値St1〜St5の中の一つを、自身が取得すべきデータとして選択することが可能である。例えば、自身のカート機IDが“100”であるカート機300は、ポーリング識別データPIが“64”の同報通信データM3に含まれる前方カート機300の状態STATUSのうち、第1番目の数値St1を選択する。このように、中継通信データS3及び同報通信データM3には、各カート機300と、その前方カート機300の状態STATUSとの対応関係が、表されており、これに基づいて各カート機300は自身の前方カート機300の状態STATUSを取得することができる。
【0072】
前方カート機300の状態STATUSが図12(b)に例示されるものである場合には、同報通信データM3を受信したカート機300のマイクロコンピュータ360は、取得した状態STATUSの数値に基づいて、自身から前方カート機300までの距離、安全ステータス、及びメッセージを表示する。前方カート機300の状態STATUSが図12(c)に例示されるものである場合には、マイクロコンピュータ360は、自身のGPS値と、取得した状態STATUSに含まれる自身の前方カート機300のGPS値とに基づいて、自身から前方カート機300までの距離を算出し、さらに当該距離に基づいて安全ステータスを決定した上で、これらの距離、安全ステータスに加えてメッセージを表示する。同報通信データM3を受信した携帯機400のマイクロコンピュータ470も同様に、適切なポーリング識別データPIに対応する数値St1〜St5の中の一つを選び出し、自身に対応するカート機300から前方カート機300までの距離や、安全ステータス等を表示したり、あるいは計算、決定した上で表示したりすることができる。
【0073】
図13は、返答通信データR10〜R24、及び中継通信データS10〜S24の一例を示すデータ構造図である。同報通信データM3を受信したカート機300は、定められたタイムスロットに、返答通信データR10〜R24を発信する。図13(a)は、この返答通信データR10〜R24の構造を例示している。制御コードCCには、当該返答通信データR10〜R24が、各カート機300からの返答を伝えるものであることを示す“A”が書き込まれている。続く識別データEIには、返答を送るカート機300の識別データ、例えば#100が書き込まれる。次のデータ部分には、当該カート機300の補正後のGPS値が、緯度、経度に分けて書き込まれる。これらの緯度及び経度はそれぞれ、例えば32ビット浮動小数点の数値をASCIIコードで表現したものである。最後の経路指定情報PostCMDには、返答すべき同報通信元を指定する“/RXX”が書き込まれる。数値“XX”には、返答先である中継器200の識別データEIが書き込まれる。数値“XX”には、例えば、中継器200の同報通信モデムユニット235の識別データの下一桁、例えば当該識別データが“20”であれば“0”が付与される。返答先を選択する手順については後述する。
【0074】
カート機300のマイクロコンピュータ360は、このような返答通信データR10〜R24を作成し、モデムユニット365に受け渡す。モデムユニット365は、返答通信データR10〜R24を特定小電力無線に載せて発信する。発信された電波を受信した幾つかの中継器200のマイクロコンピュータ230は、受信した返答通信データR10〜R24に含まれる返答先“XX”が、自身の中継器識別データEIに一致しなければ、当該返答通信データR10〜R24を無視する。
【0075】
一方、返答先“XX”が、自身の中継器識別データEIに一致しておれば、マイクロコンピュータ230は、図13(b)に示す中継通信データS10〜S24を作成する。経路指定情報PostCMDとして、“/R Prog”が設定される。ここで“Prog”は、マイクロコンピュータ230が、自身の中継器識別データEIに応じて、中継すべき中継器200の識別データEIを指定するものである。中継器200の識別データEIとして、例えば中継通信モデムユニット231の識別データが用いられる。一例を挙げると、自身の中継器識別データEIが“13”である場合には、“Prog”として“12、10、01”が付与される。数値“01”は、親機100のモデムユニット135の識別データである。この中継通信データは、中継器213から中継器212、210を経て、親機100へ中継される。なお、中継通信データS3及び同報通信データM3の送信、及び返答通信データR10〜R24及び中継通信データS10〜S24の送信に要する時間は、約3秒である。
【0076】
次に、カート機300が返答通信データR10〜R24の返送先を中継器210〜214の中から選択する手順について説明する。図14は、同報通信データM3を受信したカート機300のモデムユニット365が、マイクロコンピュータ360へ受け渡す受信データの一例を示すデータ構造図である。図14の例では、同報通信データM3を受信するカート機300は、中継器212に最も近い位置にあるカート機305(図8参照)とし、中継器210、212、213から同報通信データM3を受信するものと仮定している。このため図14(a)〜(c)として図示するように、モデムユニット365がマイクロコンピュータ360に受け渡す受信データRR1〜RR3には、中継器識別データEIとして、中継器210、212、213の同報通信モデムユニット235の識別データEI“20”、“22”、“23”の下一桁が書き込まれている。
【0077】
モデムユニット365は、受信電波の強度を計測する回路(図示略)を有しており、計測した受信電波強度RSSIを同報通信データM3に付加して、受信データRR1〜RR3をマイクロコンピュータ360へ受け渡す。図14の例では、中継器210からの受信電波強度RSSIは“47”であり、中継器212については“55”であり、中継器213については“33”である。なお、モデムユニット365は、受信データRR1〜RR3の先頭には、本通信の属性CMDについて、受信電波強度RSSIを付加するモードであることを示す“*DS=”を書き込む。
【0078】
カート機305のマイクロコンピュータ360は、受信データRR1〜RR3を受け取ると、ポーリング識別データPIが、自身に対応するものである場合には、受信電波強度RSSIを比較し、最も高い受信電波強度RSSIに対応する中継器識別データEIを特定する。マイクロコンピュータ360は、特定した中継器識別データEIを返答先として、返答通信データRmn(mn=10〜24のいずれか)の返送先“/RXX”の数値“XX”に書き込む。これにより、受信強度の最も高い同報通信電波を発信した中継器212へ、返答通信データRmnが返送される。すなわち、十分な受信強度が得られた同報通信電波を発信した中継器212から親機100へ返信データが伝えられる。それにより親機100は、返答通信データRmnを誤りなく受け取ることが可能となる。
【0079】
図15は、親機100、中継器210〜214、及びカート機301〜309の間で行われる通信のタイミング表である。図15に示すように、これらの通信は、予め設定された時間区間(タイムスロット)t1〜t14に従って行われる。図15では、周期T1(図9)のうち、親機100がポーリングデータである中継通信データS3を送信した後、これに応答して1台のカート機300から返送された中継通信データS10が、親機100に受信されるまでの時間区間t1、t2、・・・を例示している。
【0080】
時間区間t1では、親機100が中継通信データS3を発信する。この通信データS3は、中継器210及び211へ伝えるべきデータである。中継器210の中継通信モデムユニット231は、同時にこれを受信する。続く時間区間t2では、中継器210の中継通信モデムユニット231が中継通信データS3を発信し、中継器211の中継通信モデムユニット231がこれを受信する。
【0081】
次の時間区間t3では、中継器210の同報通信モデムユニット235が同報通信データM3を発信する。中継器211は、もはや中継すべき先がないため、時間区間t3で受信した中継通信データS3を発信することはない。中継器210の中継通信モデムユニット231が中継のために発信する時間区間t2と、同じ中継器210の同報通信モデムユニット235が同報通信のために発信する時間区間時刻t3とは、重複しないように設定されている。これは、一方のモデムの発信電波が、他方のモデムの動作に干渉しないようにするためである。そうすることにより、図16に例示するように、各中継器200では、中継通信モデムユニット231と同報通信モデムユニット235とを、同一の回路基板260の同一主面上に、互いに近接させて設置することが可能となる。それにより、各中継器200をコンパクトに作り上げることが可能となる。回路基板260上には、マイクロコンピュータ230を含む制御ユニット261が展開される。
【0082】
図15に戻って、次の時間区間t4では、親機100が中継通信データS3を発信する。この通信データS3は、中継器210、212〜214へ伝えるべきデータである。中継器210の中継通信モデムユニット231は、同時にこれを受信する。このとき中継器211の同報通信モデムユニット235は、同報通信データM3を発信する。このように、中継通信の特定小電力無線周波数と、同報通信の特定小電力無線周波数とが異なっているために、双方の通信の間で混線を生じることなく、異なる中継器200の間で、中継通信と同報通信とを同時に行うことが可能となっている。それにより、システム全体の通信を迅速に行い、周期T1を短くすることができる。
【0083】
次の時間区間t5では、中継器210の中継通信モデムユニット231が中継通信データS3を発信し、中継器212の中継通信モデムユニット231がこれを受信する。続く時間区間t6では、中継器212の中継通信モデムユニット231が中継通信データS3を発信し、中継器213の中継通信モデムユニット231がこれを受信する。既に述べたように、中継器210の同報通信モデムユニット235は、時間区間t3で既に同報通信データM3を発信しているため、同報通信データM3を発信しない。それには、例えば中継器210のマイクロコンピュータ230が、中継器212へ中継すべき中継通信データについては同報通信しないように、プログラムしておくことで容易に実現し得る。
【0084】
次の時間区間t7では、中継器213の中継通信モデムユニット231が中継通信データS3を発信し、中継器214の中継通信モデムユニット231がこれを受信する。このとき中継器212の同報通信モデムユニット235は、同報通信データM3を発信する。続く時間区間t8では、中継器213の同報通信モデムユニット235が同報通信データM3を発信する。中継器214は、もはや中継すべき先がないため、時間区間t7で受信した中継通信データS3を発信することはない。次に時間区間t9では、中継器214の同報通信モデムユニット235が同報通信データM3を発信する。この同報通信データM3は、例えばポーリング識別データPIが“64”に対応する5台のカート機300の1つ、例えばカート機309により受信される。
【0085】
カート機309の識別データが、仮に#100であるとする。そうすると、続く時間区間t10では、カート機309は、返送通信データR10を発信する。この返送通信データR10が、返送先として仮に中継器214を指定したものとする。そうすると、返送通信データR10は、発信と同時に中継器214の同報通信モデムユニット235に受信される。
【0086】
次の時間区間t11では、中継器214の中継通信モデムユニット231が中継通信データS10を発信し、中継器213の中継通信モデムユニット231がこれを受信する。続く時間区間t12では、中継器213の中継通信モデムユニット231が中継通信データS10を発信し、中継器212の中継通信モデムユニット231がこれを受信する。続く時間区間t13では、中継器212の中継通信モデムユニット231が中継通信データS10を発信し、中継器210の中継通信モデムユニット231がこれを受信する。そして次の時間区間t14では、中継器210の中継通信モデムユニット231が中継通信データS10を発信し、親機100のモデムユニット135がこれを受信する。続く時間区間では、他のカート機から返答通信データR11が発信される(図示略)。以上のようにして、中継通信データS3によるポーリングとその返信が実現する。
【0087】
(5.距離等の計算手順)
既に述べたように、親機100の基地局ユニット130は、各カート機300とその前方カート機300との間の距離を算出する。あるいは親機100に代えて、各カート機300のマイクロコンピュータ360が、自身とその前方カート機300との間の距離を算出したり、各携帯機400のマイクロコンピュータ470が、自身と、自身に対応するカート機300の前方カート機300との間の距離を算出したりする。また、カート機300のマイクロコンピュータ360、及び各携帯機400のマイクロコンピュータ470は、自身の位置からピンまでの距離を算出する。本実施の形態によるゴルフ場ナビゲーションシステムでは、かかる距離は図17のフローチャートに示す近似計算に従って算出される。それにより、短時間で精度の高い距離を得ることを可能にしている。基地局ユニット130、及びマイクロコンピュータ360、470は、図17のステップST2〜ST5を実行するようにプログラミングされ、それによりステップST2〜ST5の各々を実行する手段を実現する。
【0088】
この近似計算では、図18に示すように、18個のホール10を有するゴルフ場1の施設の略北端に位置する緯度J1、略南端に位置する緯度J2、略東端に位置する経度K1、及び略西端に位置する経度K2を定める。図17に例示するように、4本の経緯度J1、J2、K1、K2で囲まれた領域がゴルフ場1を全て覆うように、これらの経緯度J1、J2、K1、K2を定めるのが、精度上望ましい。緯度J1、J2が定まると、緯度J1での単位経度当たりの距離U1、及び緯度J2での単位経度当たりの距離U2が定まる。また、緯度J1と緯度J2の中央付近CN、すなわち平均緯度付近CNでの単位緯度当たりの距離U3を定めることができる。これらの距離U1、U2及びU3は、例えば、電子地図を用いて人手により定めることができる。距離U1、U2及びU3が定まると、基地局ユニット130、マイクロコンピュータ360、470のメモリ(例えば、メモリ240など)に予め記憶しておく(図17のステップST1)。
【0089】
次に、図19に例示するように、緯度及び経度が既に分かっているゴルフ場10内の任意の地点a及び地点bの間の距離を、距離U1〜U3を用いて近似的に計算する。それには先ず、地点aの緯度と地点bの緯度との平均緯度、すなわち図19の地点cの緯度を計算する。地点cは、地点aを通る緯線と地点bを通る経線との交点と、地点bとを結ぶ線分ly(地点bを通る経線の一部)の中点である。次に、地点cにおける単位経度当たりの距離U4を、距離U1及びU2から線型補間することにより計算する(ステップST2)。すなわち、地点cの緯度が、緯度J1及びJ2をp:(1−p)の比率で分割する値であれば、距離U4は、(1−p)・U1+p・U2、により算出される。
【0090】
次に、2地点a、b間の経度差を計算し、当該経度差に、距離U4を乗じることにより、2地点a、b間の東西方向距離lxを算出する(ステップST3)。また、2地点a、b間の緯度差を計算し、当該緯度差に距離U3を乗じることにより、2地点a、b間の南北間距離lyを算出する(ステップST4)。ステップST3とST4との先後関係は任意である。次に、東西方向距離lxと南北方向距離lyとの自乗和の平方根を、2地点a、b間の距離lとして算出する(ステップST5)。以上の手順により、2地点a、b間の距離lが近似的に求められる。
【0091】
図3(b)を参照しつつ説明したとおり、携帯機400の画面431には、プレーヤの次の目標点465が表示される。図20は、かかる目標点465を計算し、表示する手順を示すフローチャートである。携帯機400のマイクロコンピュータ470は、図20のステップST12〜ST16を実行するようにプログラミングされ、それによりステップST12〜ST16の各々を実行する手段を実現する。
【0092】
この手順では、図21に例示するような、ホール10内のティーグラウンド11上の第1打点からメイングリーン12及びサブグリーン13のピンまでの推奨コースが、ホール10の画像データ、ピンの位置と共に、携帯機400のメモリ483に予め記憶される(図20のステップST11)。推奨コースとして、例えば、折れ線を表現する一次方程式が記憶される。第1打点は、フロントティ14、レギュラーティ15、バックティ16、及びレディスティ17のうちの1以上である。メモリ483にはさらに、現在位置からピンまでの距離に応じた目標飛距離が予め記憶される(ステップST11)。目標飛距離は、例えば、現在位置からピンまでの距離がドライバーの飛距離(以下、245ydと仮定する)以上であれば当該飛距離245ydに定められ、当該飛距離245yd未満かつフェアウェイウッドの飛距離(以下、200ydと仮定する)以上であれば当該飛距離200ydに定められる。
【0093】
さらにメモリ483には、ある基準距離と、グリーン12,13上の所定位置とが予め記憶される(ステップST11)。基準距離として、例えばフェアウェイウッドの飛距離200ydが与えられる。また所定位置は、例えばグリーン上のピン、センタ、エッジのいずれかの位置である。
【0094】
メモリ483にこれらのデータが予め記憶されておれば、マイクロコンピュータ470は、目標地点の位置を計算することができる。それにはマイクロコンピュータ470はまず、補正後のGPS値に基づく自身の位置からピンまでの距離を算出する(ステップST12)。次に、マイクロコンピュータ470は、算出した距離を基準距離と比較する(ステップST13)。算出した距離が基準距離以上であれば、マイクロコンピュータ470は、補正後のGPS値に基づく自身の位置を中心とし、算出された距離に応じた目標飛距離を半径とする円と、推奨コースとの交点の位置を算出する(ステップST14)。
【0095】
図21の例では、自身の位置は、ティーグラウンド11にあるので、自身の位置からピンまでの距離は、245ys以上であり、かつ200ydに設定された基準距離以上である。このため、目標飛距離を245ydとして、ステップST14により交点の位置が算出されることとなる。一方、図22に示すように、第1打後の自身の位置(図中の現在地)からピンまでの距離は、245yd未満であり、かつ200ydに設定された基準距離以上である。このため、目標飛距離を200ydとして、同じくステップST14により交点の位置が算出されることとなる。
【0096】
図23は、ステップST14の計算方法を座標上に表したグラフである。この例では、自身の位置(現在地)は、ティーグラウンド11の付近にあって、ピンまでの距離は245yd以上であると仮定している。それゆえ目標飛距離は245ydである。第1打点からメイングリーンまでの推奨コースが線分L1及びL2で表され、第1打点からサブグリーンまでの推奨コースが線分L1及びL3で表される。現在地を中心とする半径245ydの円C1と、線分L1、L2との交点として、メイン目標地点が求められる。また、現在地を中心とする半径245ydの円C1と、線分L1、L3との交点として、サブ目標地点が求められる。
【0097】
次に、マイクロコンピュータ470は、図21及び図22に例示するように、算出された交点の位置を目標地点として、推奨コースとともにホール10の絵地図に重ねて、画面431上に表示させる(ステップST15)。このとき、打ち出し方向も同時に表示される(図21、図22の矢印)。
【0098】
一方、ステップST13の判定において、算出した距離が基準距離未満であれば、マイクロコンピュータ470は、グリーン12、13上の所定位置、例えばピンの位置を目標地点として、推奨コースとともにホール10の絵地図に重ねて、画面431上に表示させる(ステップST16)。このとき、打ち出し方向も同時に表示される。
【0099】
図1及び図2を参照しつつ述べたように、カート機300は画面331上に、自身が現在あるホール番号等のホール情報333を表示し、同じく携帯機400は画面431上に、自身が現在あるホール番号432を表示する。図24は、このように自身が現在あるホール番号を特定し、表示する手順を示すフローチャートである。携帯機400を例に取ると、そのマイクロコンピュータ470は、図24のステップST22〜ST32を実行するようにプログラミングされ、それによりステップST22〜ST32の各々を実行する手段を実現する。
【0100】
この手順では、図25に例示するように、各ホール10を覆うように、凸多角形(全ての内角が180°未満である三角形以上の多角形)を1以上設定する。図25には、3個の凸四角形で1つのホール10を覆う例を示している。そして、これら凸多角形の角の位置A(X1,Y1)〜H(X8,Y8)をメモリ483に予め記憶させておく(図24のステップST21)。同時に、各ホール10について、凸多角形の個数Mを記憶させておく。個数Mは、ホール10毎に異なっていても良い。
【0101】
メモリ483にこれらのデータが予め記憶されておれば、マイクロコンピュータ470は、携帯機400が何れのホール内にあるか、あるいは何れのホールにもないか、を判定し、表示することができる。それにはマイクロコンピュータ470はまず、制御変数であるホール番号nを“1”にリセットする(ステップST22)。続いて、制御変数である凸多角形番号mを“1”にリセットする(ステップST23)。次に、マイクロコンピュータ470は、第nホールの第m凸多角形について、一周する方向に定義される各辺のベクトルと、起点を共通にして補正後の自身のGPS値へ向かうベクトルとの外積の符号を計算する(ステップST24)。
【0102】
図25の例では、携帯機400の位置をX(x1,y1)で表している。第nホールの第m凸多角形が四角形ABCHであれば、ベクトルAB×ベクトルAX、ベクトルBC×ベクトルBX、ベクトルCH×ベクトルCX、及びベクトルHA×ベクトルHXが計算され、その符号が正であるか負であるかが判定される。ここで、記号「×」はベクトルの外積を表す。例えば、ベクトルAB×ベクトルAXは、(X2−X1)・(y1−Y1)−(Y2−Y1)・(x1−X1)と書き表すことができる。
【0103】
次に、第nホールの第m凸多角形について、外積の符号が全て同一であるか否かが判断される(ステップST25)。外積の符号が全て同一であれば、マイクロコンピュータ470は、携帯機400の位置が第nホールに存するものと判定し(ステップST26)、判定結果を画面431上に表示させる(ステップST32)。外積の符号が全て同一である訳ではない場合には、マイクロコンピュータ470は、凸多角形番号mをインクリメントし(ステップST27)、当該番号mが第nホールの凸多角形の個数M(n)に達しているか否かを判定する(ステップST28)。番号mが個数M(n)に達してなければ、新たな第m凸多角形について、ステップST24の処理が行われる(ステップST24)。番号mが個数M(n)に達しておれば、マイクロコンピュータ470は、ホール番号nをインクリメントし(ステップST29)、当該番号nがホール数18を超えているか否かを判定する(ステップST30)。
【0104】
番号nがホール数18を超えていなければ、凸多角形番号mがリセットされた上で(ステップST23)、ステップST24の処理が行われる(ステップST24)。一方、番号nがホール数18を超えておれば、マイクロコンピュータ470は、携帯機400の位置が何れのホールにもないと判定し(ステップST31)、判定結果を画面431上に表示させる(ステップST32)。以上の手順により、携帯機400の何れのホール10に存在するか、或いは何れのホール10にも存在しないかが、判定され、かつ表示される。また、携帯機400だけでなくカート機300についても、同様の処理が可能である。
【0105】
(6.その他の実施の形態)
(1)以上の実施の形態では、複数の中継器200の全てが中継通信と共に同報通信を行う例を示したが、一部の中継器200が中継通信のみを行うようにシステムを構成しても良い。
【0106】
(2)以上の実施の形態では、特定小電力無線によるゴルフ場ナビゲーションシステムを示したが、従来のゴルフ場ナビゲーションシステムとして使用されている業務無線によるシステムを廃棄することなく、音声通信として併用する形態を採ることも可能である。それにより、既に設置されている通信インフラを有効利用することができる。業務無線システムにおいても、クラブハウス等に親機が設置され、カート機、あるいは携帯機が子機として使用される。特定小電力無線システムと業務無線システムとは、独立して通信が行われるため、緊急時の音声通信が、特定小電力無線によるデータ通信とは無関係に即時に行い得る。
【0107】
(3)以上の実施の形態では、ゴルフ場で使用されるゴルフ場ナビゲーションシステムを示したが、本発明の施設内ナビゲーションシステムは、ゴルフ場以外に、テーマパーク、遊園地、工場などに使用することも可能である。
【0108】
(4)以上の実施の形態において、「GPS値」は、緯度情報及び経度情報を含んでおれば足りるが、さらに時間情報等をも含み、例えば、NMEA書式で表現されたものであっても良い。
【図面の簡単な説明】
【0109】
【図1】本発明の一実施の形態としてのゴルフ場ナビゲーションシステムに用いられるカート機を示す外観図である。
【図2】図1と同一のシステムに用いられる携帯機を示す外観図である。
【図3】図2の携帯機の画面に現れる別の表示内容を例示する画面図である。
【図4】図1と同一のシステムに使用される親機の構成例を示すブロック図である。
【図5】図1と同一のシステムに使用される中継器の構成例を示すブロック図である。
【図6】図1に外観を示したカート機の構成例を示すブロック図である。
【図7】図2に外観を示した携帯機の構成例を示すブロック図である。
【図8】図1と同一のシステムの全体構成の一例を示す概略図である。
【図9】図9のシステムにおける通信のシーケンス図である。
【図10】中継通信データS1及び同報通信データM1の一例を示すデータ構造図である。
【図11】中継通信データS2及び同報通信データM2の一例を示すデータ構造図である。
【図12】中継通信データS3及び同報通信データM3の一例を示すデータ構造図である。
【図13】返答通信データR10等及び中継通信データS10等の一例を示すデータ構造図である。
【図14】カート機のモデムユニットが、マイクロコンピュータへ受け渡す受信データの一例を示すデータ構造図である。
【図15】図9のシステムにおける通信のタイミング表である。
【図16】中継器の構成例を示す外観図である。
【図17】2地点間の距離を計算する手順を例示するフローチャートである。
【図18】図17の計算手順を説明するための説明図である。
【図19】図17の計算手順を説明するためのグラフである。
【図20】目標点の位置を計算する手順を例示するフローチャートである。
【図21】図20の計算手順を説明するための説明図である。
【図22】図20の計算手順を説明するための説明図である。
【図23】図20の計算手順を説明するためのグラフである。
【図24】現在地が何れのホールに位置するかを特定する手順を例示するフローチャートである。
【図25】図24の手順を説明するためのグラフである。
【符号の説明】
【0110】
1 ゴルフ場(施設)
10 ホール(特定区域)
11 ティーグラウンド
12、13、462、463 グリーン
100 親機
131、361、471 GPSユニット(GPS受信機)
200、210〜214 中継器
240、380、483 メモリ
300、301〜309 カート機(子機)
400、401〜404 携帯機(子機)
464 現在地(自身の位置)
465 目標点
S1〜S3、S10〜S24 中継通信データ
M1〜M3 同報通信データ
R10〜R24 返答通信データ
L1〜L3 推奨コース
C1 円
【特許請求の範囲】
【請求項1】
特定小電力無線により通信する、親機と複数の中継器と可搬性の複数の子機とを備え、
前記複数の中継器は、前記親機からの通信内容を順に伝えるとともに、前記複数の中継器の少なくとも一部は、前記通信内容を前記複数の子機に同報通信するものであり、
前記親機はGPS受信機を有しており、GPS基準値に対するGPS補正値を演算して前記通信内容として送信し、
前記複数の子機の各々はGPS受信機を有しており、同報通信された前記GPS補正値を用いて自身のGPS値を補正し、
前記複数の中継器の前記少なくとも一部は、前記親機及び前記複数の中継器の間でなされる中継通信とは異なる周波数で同報通信を行う、施設内ナビゲーションシステム。
【請求項2】
前記複数の中継器のうち、中継通信と同報通信とを行う各中継器は、通信時間が互いに重複しないようにこれらの通信を行うとともに、
前記複数の中継器は、互いに異なる一部の中継器の間で、一方が中継通信を行う時間に重複して他方が同報通信を行う、請求項1に記載の施設内ナビゲーションシステム。
【請求項3】
前記複数の子機の各々は、補正後の自身のGPS値を発信し、
前記複数の中継器は、発信された前記GPS値を前記親機へ伝える、請求項1または2に記載の施設内ナビゲーションシステム。
【請求項4】
前記親機は、前記複数の子機のGPS値に基づいて、当該複数の子機の各々に対応づけられた1つの子機のGPS値を、当該対応関係とともに前記通信内容として送信する、請求項3に記載の施設内ナビゲーションシステム。
【請求項5】
同報通信データは、発信する中継器の識別データを含んでおり、
前記複数の子機の各々は、受信電波の強度を計測する回路を有しており、返答を要する同報通信データを受信した場合、受信電波強度の最も高い電波を発信した中継器を前記識別データに基づいて特定し、特定された当該中継器から親機へ中継すべく中継経路を指示するデータを含めて返答データを発信する、請求項1ないし4のいずれかに記載の施設内ナビゲーションシステム。
【請求項6】
前記親機又は前記複数の子機の各々は、GPS値が得られている施設内の2地点間の距離を算出するものであり、
前記親機又は前記複数の子機の各々は、
施設の略北端の単位経度当たりの距離と、施設の略南端の単位経度当たりの距離と、施設の南北方向略中央での単位緯度当たりの距離と、を記憶するためのメモリと、
前記2地点の平均緯度での単位経度当たりの距離を、施設の略北端の単位経度当たりの距離と、略南端の単位経度当たりの距離とから線型補間して算出する手段と、
前記2地点の経度差に、算出された前記平均緯度での単位経度当たりの距離を乗じて前記2地点の東西方向距離を算出する手段と、
前記2地点の緯度差に、前記略中央での単位緯度当たりの距離を乗じて前記2地点の南北方向距離を算出する手段と、
前記東西方向距離と前記南北方向距離との自乗和の平方根を、前記2地点間の距離として算出する手段と、を有する請求項1ないし5のいずれかに記載の施設内ナビゲーションシステム。
【請求項7】
前記複数の子機の各々は、施設内の特定地点のGPS値を記憶するためのメモリを有しており、当該メモリに記憶された前記特定地点のGPS値と、補正後の自身のGPS値とに基づいて、自身の位置と前記特定地点との間の距離を、前記2地点間の距離として算出して表示する、請求項6に記載の施設内ナビゲーションシステム。
【請求項8】
前記複数の子機の各々は、施設内に設けられた1以上の特定区域のいずれかに自身が存在するか否か、かつ存在する場合には何れに存在するかを表示するものであり、
前記複数の子機の各々は、
前記1以上の特定区域毎に当該特定区域を覆うように設定された1以上の凸多角形の各角の位置を記憶するためのメモリと、
任意の凸多角形について、一周する方向に定義される各辺のベクトルと、起点を共通にして補正後の自身のGPS値へ向かうベクトルとの外積の符号を算出する手段と、
前記外積の符号が全て同一である凸多角形が存するか否かを判定する手段と、
前記判定により、前記外積の符号が全て同一である凸多角形が存する場合に、当該凸多角形が覆う特定区域内に自身の位置が存在する旨を表示する手段と、を有する請求項1ないし7のいずれかに記載の施設内ナビゲーションシステム。
【請求項9】
前記施設内ナビゲーションシステムは、ゴルフ場ナビゲーションシステムであり、
前記複数の子機の各々は、
直線又は折れ線で表現された第1打点からピンまでの推奨コースと、自身の位置からピンまでの距離に応じた目標飛距離とを記憶するためのメモリと、
補正後のGPS値に基づく自身の位置からピンまでの距離を算出する手段と、
補正後のGPS値に基づく前記自身の位置を中心とし、算出された前記距離に応じた前記目標飛距離を半径とする円と前記推奨コースとの交点の位置を算出する手段と、
算出された前記交点の位置を目標地点として前記推奨コースとともに表示する手段と、を有する請求項1ないし8のいずれかに記載の施設内ナビゲーションシステム。
【請求項10】
前記複数の子機の各々は、
基準距離とゴルフ場のグリーン上の所定位置とを記憶するためのメモリと、
補正後のGPS値に基づく自身の位置からピンまでの前記距離を、前記基準距離と比較する手段と、をさらに有し、
前記表示する手段は、前記比較により自身の位置からピンまでの前記距離が前記基準距離よりも小さい場合には、前記グリーン上の前記所定位置を目標地点として前記推奨コースとともに表示する、請求項9に記載の施設内ナビゲーションシステム。
【請求項11】
別の親機と、当該別の親機と業務無線により音声通信する可搬性の別の複数の子機と、をさらに備える、請求項1ないし10のいずれかに記載の施設内ナビゲーションシステム。
【請求項1】
特定小電力無線により通信する、親機と複数の中継器と可搬性の複数の子機とを備え、
前記複数の中継器は、前記親機からの通信内容を順に伝えるとともに、前記複数の中継器の少なくとも一部は、前記通信内容を前記複数の子機に同報通信するものであり、
前記親機はGPS受信機を有しており、GPS基準値に対するGPS補正値を演算して前記通信内容として送信し、
前記複数の子機の各々はGPS受信機を有しており、同報通信された前記GPS補正値を用いて自身のGPS値を補正し、
前記複数の中継器の前記少なくとも一部は、前記親機及び前記複数の中継器の間でなされる中継通信とは異なる周波数で同報通信を行う、施設内ナビゲーションシステム。
【請求項2】
前記複数の中継器のうち、中継通信と同報通信とを行う各中継器は、通信時間が互いに重複しないようにこれらの通信を行うとともに、
前記複数の中継器は、互いに異なる一部の中継器の間で、一方が中継通信を行う時間に重複して他方が同報通信を行う、請求項1に記載の施設内ナビゲーションシステム。
【請求項3】
前記複数の子機の各々は、補正後の自身のGPS値を発信し、
前記複数の中継器は、発信された前記GPS値を前記親機へ伝える、請求項1または2に記載の施設内ナビゲーションシステム。
【請求項4】
前記親機は、前記複数の子機のGPS値に基づいて、当該複数の子機の各々に対応づけられた1つの子機のGPS値を、当該対応関係とともに前記通信内容として送信する、請求項3に記載の施設内ナビゲーションシステム。
【請求項5】
同報通信データは、発信する中継器の識別データを含んでおり、
前記複数の子機の各々は、受信電波の強度を計測する回路を有しており、返答を要する同報通信データを受信した場合、受信電波強度の最も高い電波を発信した中継器を前記識別データに基づいて特定し、特定された当該中継器から親機へ中継すべく中継経路を指示するデータを含めて返答データを発信する、請求項1ないし4のいずれかに記載の施設内ナビゲーションシステム。
【請求項6】
前記親機又は前記複数の子機の各々は、GPS値が得られている施設内の2地点間の距離を算出するものであり、
前記親機又は前記複数の子機の各々は、
施設の略北端の単位経度当たりの距離と、施設の略南端の単位経度当たりの距離と、施設の南北方向略中央での単位緯度当たりの距離と、を記憶するためのメモリと、
前記2地点の平均緯度での単位経度当たりの距離を、施設の略北端の単位経度当たりの距離と、略南端の単位経度当たりの距離とから線型補間して算出する手段と、
前記2地点の経度差に、算出された前記平均緯度での単位経度当たりの距離を乗じて前記2地点の東西方向距離を算出する手段と、
前記2地点の緯度差に、前記略中央での単位緯度当たりの距離を乗じて前記2地点の南北方向距離を算出する手段と、
前記東西方向距離と前記南北方向距離との自乗和の平方根を、前記2地点間の距離として算出する手段と、を有する請求項1ないし5のいずれかに記載の施設内ナビゲーションシステム。
【請求項7】
前記複数の子機の各々は、施設内の特定地点のGPS値を記憶するためのメモリを有しており、当該メモリに記憶された前記特定地点のGPS値と、補正後の自身のGPS値とに基づいて、自身の位置と前記特定地点との間の距離を、前記2地点間の距離として算出して表示する、請求項6に記載の施設内ナビゲーションシステム。
【請求項8】
前記複数の子機の各々は、施設内に設けられた1以上の特定区域のいずれかに自身が存在するか否か、かつ存在する場合には何れに存在するかを表示するものであり、
前記複数の子機の各々は、
前記1以上の特定区域毎に当該特定区域を覆うように設定された1以上の凸多角形の各角の位置を記憶するためのメモリと、
任意の凸多角形について、一周する方向に定義される各辺のベクトルと、起点を共通にして補正後の自身のGPS値へ向かうベクトルとの外積の符号を算出する手段と、
前記外積の符号が全て同一である凸多角形が存するか否かを判定する手段と、
前記判定により、前記外積の符号が全て同一である凸多角形が存する場合に、当該凸多角形が覆う特定区域内に自身の位置が存在する旨を表示する手段と、を有する請求項1ないし7のいずれかに記載の施設内ナビゲーションシステム。
【請求項9】
前記施設内ナビゲーションシステムは、ゴルフ場ナビゲーションシステムであり、
前記複数の子機の各々は、
直線又は折れ線で表現された第1打点からピンまでの推奨コースと、自身の位置からピンまでの距離に応じた目標飛距離とを記憶するためのメモリと、
補正後のGPS値に基づく自身の位置からピンまでの距離を算出する手段と、
補正後のGPS値に基づく前記自身の位置を中心とし、算出された前記距離に応じた前記目標飛距離を半径とする円と前記推奨コースとの交点の位置を算出する手段と、
算出された前記交点の位置を目標地点として前記推奨コースとともに表示する手段と、を有する請求項1ないし8のいずれかに記載の施設内ナビゲーションシステム。
【請求項10】
前記複数の子機の各々は、
基準距離とゴルフ場のグリーン上の所定位置とを記憶するためのメモリと、
補正後のGPS値に基づく自身の位置からピンまでの前記距離を、前記基準距離と比較する手段と、をさらに有し、
前記表示する手段は、前記比較により自身の位置からピンまでの前記距離が前記基準距離よりも小さい場合には、前記グリーン上の前記所定位置を目標地点として前記推奨コースとともに表示する、請求項9に記載の施設内ナビゲーションシステム。
【請求項11】
別の親機と、当該別の親機と業務無線により音声通信する可搬性の別の複数の子機と、をさらに備える、請求項1ないし10のいずれかに記載の施設内ナビゲーションシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】

【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2010−78413(P2010−78413A)
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願番号】特願2008−245952(P2008−245952)
【出願日】平成20年9月25日(2008.9.25)
【出願人】(508288962)株式会社ピーアイシステム (1)
【Fターム(参考)】
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願日】平成20年9月25日(2008.9.25)
【出願人】(508288962)株式会社ピーアイシステム (1)
【Fターム(参考)】
[ Back to top ]