
施設解体支援方法及び装置
【課題】施設解体時の解体部位搬送における干渉シミュレーションを効率良く実行する。
【解決手段】光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を得る機器群3次元実態形状計測ステップと、機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報を作成する機器群3次元実態形状情報作成ステップと、解体対象機器の解体部位を選択し、解体部位3次元実態形状情報を得る解体部位3次元実態形状情報選択ステップと、解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーションステップとを行う。
【解決手段】光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を得る機器群3次元実態形状計測ステップと、機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報を作成する機器群3次元実態形状情報作成ステップと、解体対象機器の解体部位を選択し、解体部位3次元実態形状情報を得る解体部位3次元実態形状情報選択ステップと、解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーションステップとを行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の機器が設置された施設における解体対象機器を解体して施設内に仮置きし、搬送するときに該解体対象機器が施設内の他の設置機器への衝突(干渉)の有無をシミュレーションする施設解体支援方法及び装置に関する。
【背景技術】
【0002】
複数の機器が設置された施設における解体対象機器を解体して施設内に仮置きし、搬送するときに該解体対象機器が施設内の他の設置機器に衝突(干渉)するかどうか確認するシミュレーションを行う施設解体支援方法は、施設建設に使用した施設空間と該施設内における設置機器と該設置機器の設置態様のCADデータを使用し、解体対象機器のCADデータを選択して該解体対象機器CADデータと施設空間CADデータと機器設置態様CADデータによって施設解体作業領域の解体作業用CADデータを作成し、この解体作業用CADデータを使用して、解体対象機器の解体、仮置き、搬送するときの他の設置機器との干渉の有無をシミュレーションするようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−149311号公報
【特許文献2】特開2004−201085号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の施設解体支援方法における前記シミュレーション方法では、取り扱う施設建設用CADデータは、様々なデータ形式で保存され、その量が多いことから、小型の情報処理装置(携帯型コンピュータ)を用いて効率良く実行することが困難であった。
【0005】
また、解体作業用CADデータの作成には、過去に作成された複数の建設用CADデータを収集しなければならないことから、解体作業用CADデータの作成作業が面倒であった。
【0006】
従って、本発明の1つの目的は、施設解体時の解体部位搬送における干渉シミュレーションを効率良く実行することができるようにすることにある。
【0007】
本発明の他の目的は、取り扱うデータの量を少なくして小型の携帯型情報処理装置を用いて施設解体支援における干渉シミュレーションを効率良く実行することができるようにすることにある。
【0008】
更に他の目的は、過去に作成された建設用CADデータを使用することなく解体作業用のCADデータ(3次元実態形状情報)を作成して干渉シミュレーションを行うことができる施設解体支援方法を実現することにある。
【課題を解決するための手段】
【0009】
本発明は、解体施設の現場を計測して得た解体現場計測データを使用して小型の携帯型情報処理装置で取り扱うのに適した量の解体現場の解体シミュレーション用の3次元実態形状CADデータを作成し、この解体シミュレーション用の3次元実態形状CADデータを使用して干渉シミュレーションを行う施設解体支援方法であり、
具体的には、複数の機器が設置された施設における解体対象機器を解体して施設内に仮置き、搬送するときに該解体対象機器が施設内の他の機器と衝突(干渉)するかどうかをシミュレーションする施設解体支援方法において、
光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状計測情報を得る機器群3次元実態形状計測ステップと、
機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報(機器群3次元実態形状CADデータ)を作成する機器群3次元実態形状情報作成ステップと、
施設内の機器群の機器群3次元実態形状情報から解体対象機器の解体部位を選択し、解体部位3次元実態形状情報(解体部位3次元実態形状CADデータ)を得る解体部位3次元実態形状情報選択ステップと、
解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーションステップと
を行うことを特徴とする。
【0010】
なお、本説明では、レーザ照射によって得られる施設内の機器群の形状を構成する個々の点情報を計測画素と表現する。
【0011】
そして、前記機器群3次元実態形状計測ステップは、前記レーザ照射を施設内の複数の位置から行って取得した計測画素毎の距離情報を統合することで施設内の機器群の機器群3次元実態形状計測情報を得ることを特徴とする。
【0012】
また、前記計測画素は、所定の距離情報領域を区画して該区画内に位置する複数の実計測画素の重心位置を求め、求めた重心位置を計測画素としてデータ量を削減することを特徴とする。
【0013】
また、前記機器群3次元実態形状計測ステップにおいて得た機器群3次元実態形状計測情報における計測画素に電子カメラで施設内を撮影して得た撮影画像情報に基づいて色情報を付加することを特徴とする。
【0014】
また、前記干渉シミュレーションステップにおける解体部位3次元実態形状情報の移動は、施設内に配置したサイコロマーカを電子カメラで撮影して得たサイコロマーカ位置情報に対応させて行うことを特徴とする。
【発明の効果】
【0015】
本発明は、光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を生成し、この機器群3次元実態形状情報から解体対象機器の解体部位を選択して解体部位3次元実態形状情報を作成し、この機器群3次元実態形状情報と解体部位3次元実態形状情報を使用して解体部位の解体、仮置き、運搬するときの施設内の他の機器との干渉をシミュレーションするようにしたので、取り扱うデータの量を少なくすることができ、小型の情報処理装置を用いて施設解体支援における干渉シミュレーションを効率良く実行することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施例における施設解体支援装置のブロック図である。
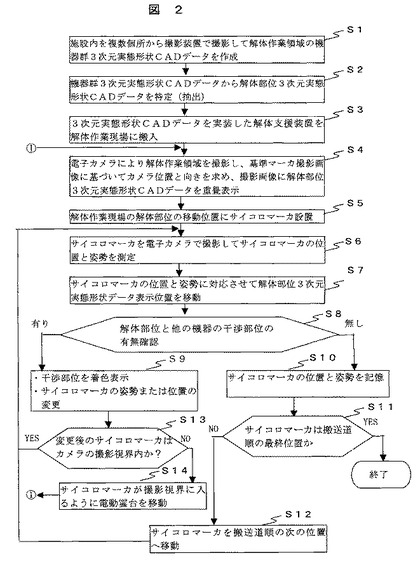
【図2】本発明の実施例における施設解体支援方法の手順を示すフローチャートである。
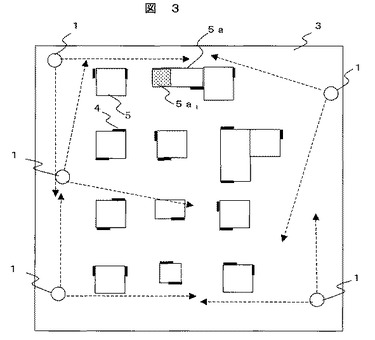
【図3】本発明の実施例において施設内の解体作業領域の3次元実態形状CADデータを作成するための撮影手順を示す模式図である。
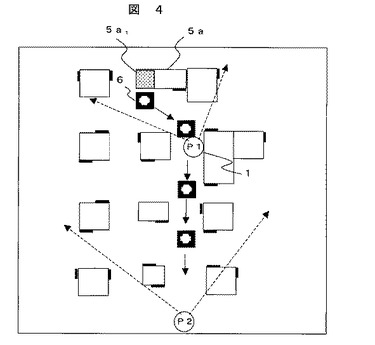
【図4】本発明の実施例において施設内における解体部位搬送での干渉確認の手順を示す模式図である。
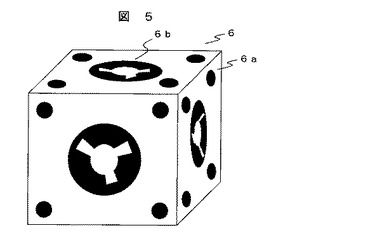
【図5】本発明の実施例において使用するサイコロマーカの斜視図である。
【発明を実施するための形態】
【0017】
本発明の施設解体支援方法は、複数の機器が設置された施設における解体対象機器を解体して施設内に仮置き、搬送するときに該解体対象機器が施設内の他の機器と衝突(干渉)するかどうかをシミュレーションする施設解体支援方法において、
光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を得る機器群3次元実態形状計測ステップと、
機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報を作成する機器群3次元実態形状情報作成ステップと、
施設内の機器群の機器群3次元実態形状情報から解体対象機器の解体部位を選択し、解体部位3次元実態形状情報を得る解体部位3次元実態形状情報選択ステップと、
解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーションステップと、
を行うことにより実現する。
【実施例】
【0018】
この実施例における施設解体支援装置は、図1に示すように、電動雲台1aに小型電子カメラ1bと光波測距儀(レーザレンジファインダ)1cを取り付けて構成した撮影装置1と、この撮影装置1によって得た撮影画像データのデータ処理機能と画像表示機能とデータ記憶機能を有する情報処理装置2を備える。
【0019】
そして、この実施例における施設解体支援方法は、前記施設解体支援装置を用いて、基本的には、次のような手順で実行する。図2を参照して説明する。
【0020】
ステップS1
図3に示すように、施設3内を複数個所から撮影装置1の小型電子カメラ1bで撮影して得た施設内に設置された基準マーカ4と設置機器5の撮影画像データを情報処理装置2で処理することにより該施設内における小型電子カメラ1bのトラッキングを行う。また、施設3内を複数個所から撮影装置1の光波測距儀1cによりレーザ照射することによって取得した該施設内の機器群の形状に対応する計測画素毎の計測距離データを統合して該施設内の機器群の機器群3次元実態形状情報である機器群3次元実態形状CADデータを生成する。この機器群3次元実態形状CADデータは、データ量が多いと、干渉シミュレーションにおいて使用する情報処理装置2におけるデータ処理負荷が大きくなって効率的なシミュレーションが阻害されることからデータ量を削減する処理を施す。このデータ量削減方法については、後述する。そして、小型電子カメラ1bによって施設内に設置された基準マーカ4と設置機器5を撮影して取得した撮影画像データにより前記機器群3次元実態形状CADデータに色情報を付加する。小型電子カメラ1bによる撮影と、光波測距儀1cによる計測は、別々に行うことが可能である。
【0021】
ステップS2
記憶した施設3内の解体作業領域の機器群3次元実態形状CADデータを画像表示させて解体対象機器5aにおける解体部位5a1を指定することにより解体部位3次元実態形状情報である解体部位3次元実態形状CADデータを特定(抽出)して記憶する。
【0022】
ステップS3
解体作業領域の機器群及び解体対象機器5aにおける解体部位5a1の3次元実態形状CADデータを実装した施設解体支援装置を解体作業現場に搬入する。
【0023】
ステップS4
図4に示すように、解体対象機器5a及び基準マーカ4が小型電子カメラ1bの撮影視界に入るように電動雲台1aを設置し、小型電子カメラ1bにより解体対象機器5aと基準マーカ4を含む解体作業領域を撮影し、撮影画像を表示すると共に、基準マーカ撮影画像データに基づいてカメラ位置と向きを求め、解体作業領域の機器群3次元実態形状CADデータから解体対象機器5aの解体部位3次元実態形状CADデータを読み出して解体部位画像として前記カメラ位置と向きに対応させて撮影画像に重畳させて表示する。
【0024】
ステップS5
解体作業現場の解体対象機器5aの解体部位5a1の移動位置(仮置き位置)(解体作業現場における3次元空間のX軸、Y軸、Z軸に平行な位置)に対応させて、サイコロマーカ6を設置する。このサイコロマーカ6の設置は、作業者が手作業で行う。このサイコロマーカ6は、図5に示すように、直方体基材6aの6面に該直方体基材6aの位置と姿勢(解体作業現場における3次元空間のX軸、Y軸、Z軸における回転角度)を画像認識によって計測するためのマーク6bを付した構成である。
【0025】
ステップS6
設置されたサイコロマーカ6を小型電子カメラ1bで撮影し、サイコロマーカ撮影画像データに基づいてサイコロマーカ6の位置と姿勢を求める。
【0026】
ステップS7
サイコロマーカ6の位置と姿勢に対応させて解体対象機器5aの解体部位3次元実態形状CADデータの解体部位画像表示位置を移動する。
【0027】
ステップS8
サイコロマーカ6の位置と姿勢に対応させて表示した解体部位が該位置の周囲に位置する他の機器に干渉(衝突)するかどうかを確認する。この干渉確認は、解体作業領域の機器群3次元実態形状CADデータと解体部位3次元実態形状CADデータを対比させ、同一位置に両者の部位が存在するかどうかを照合することにより行う。
【0028】
ステップS9
干渉部位が存在するときには、干渉部位を作業者が視覚的に注目することができる色に着色表示する。この干渉部位の着色表示により、作業者は、サイコロマーカ6の姿勢及び/又は位置を変える必要性を認識し、着色表示された干渉部位を参考にしてサイコロマーカ6の姿勢及び/又は位置を変更する。
【0029】
ステップS10
干渉部分が存在しない(なくなった)ときには、そのときのサイコロマーカ6の位置と姿勢を記憶する。
また、ステップS9における干渉部位が存在するときにも、随時、そのときのサイコロマーカ6の位置と姿勢を記憶することができる。
【0030】
ステップS11
サイコロマーカ6の位置が解体部位搬送道順の最終位置かどうかを確認し、最終位置であれば処理を終了し、次の移動位置があれば次のステップに進む。
【0031】
ステップS12
サイコロマーカ6を搬送道順の次の位置へ移動してステップS6からの処理に戻る。
【0032】
ステップS13
ステップS9においてサイコロマーカ6の姿勢または位置を変更した後に変更後のサイコロマーカ6が小型電子カメラ1bの撮影視界内にあるかどうかを確認し、撮影視界内であればステップS6に戻る。
【0033】
ステップS14
位置変更によってサイコロマーカ6が小型電子カメラ1bの撮影視界に入らなくなったときには、サイコロマーカ6が撮影視界に入る位置に電動雲台1aを移動させる。そして、ステップS4に戻って、基準マーカ4を撮影してカメラ位置と向きを測定することにより撮影画像と解体作業領域の機器群3次元実態形状CADデータとの対応関係を整合させる。
【0034】
このようにして解体部位5a1を搬送する道順について干渉確認し、干渉が起こらないサイコロマーカ位置と姿勢を記憶することにより、施設3内の解体対象機器5aの解体部位5a1を解体して仮置き、搬送するときに施設3内の他の機器5と干渉しないようにする道順(位置)と解体部位5a1の姿勢情報を情報処理装置2に保持することができ、実際に解体対象機器5aを解体して仮置き、搬送するときにこの情報を読み出して解体部位5a1の仮置き、搬送における各位置と姿勢を画像表示することにより解体作業を支援することができる。
【0035】
解体作業領域の機器群3次元実態形状CADデータ作成は、具体的には、次のようにして行う。
【0036】
施設3内を複数個所から撮影するときの撮影装置1の各位置と姿勢の情報は、施設3内の予め定めた既知の位置に設置した基準マーカ4を小型電子カメラ1bで撮影することにより得た撮影画像データにおける基準マーカ4の写り込み位置を情報処理装置2で解析することにより求める。そして、解体作業領域の機器群3次元実態形状CADデータは、複数個所から光波測距儀1cにより施設3内の設置機器5の各部位の3次元計測を行い、複数個所からの計測で取得した各計測画素データをスムージング処理し、ICP(Iterative Closes Point)アルゴリズムを用いて統合処理し、所定の距離情報領域毎に区画して該区画内に位置する複数の実計測画素の重心位置を求め、求めた重心位置を計測画素存在位置とすることにより機器群の3次元実態形状を大きく変えることなくデータ量を削減することにより干渉シミュレーションを行うときに小型の携帯型情報処理装置で取り扱うのに適したデータ量とするように作成する。
【0037】
また、解体対象機器5における解体部位5a1の解体部位3次元実態形状CADデータの作成は、解体作業領域の機器群3次元実態形状CADデータから解体対象機器5aの領域を選択して画像表示させ、表示画像上で解体対象機器5aにおける切断部分(解体部位)をマウス等により指示することにより指示範囲に含まれる解体対象機器5の3次元実態形状CADデータを切り出(抽出)して解体部位3次元実態CADデータとするように行う。
【0038】
施設内の機器群の機器群3次元実態形状CADデータや解体部位3次元実態形状CADデータを得るための処理を行う情報処理装置と干渉シミュレーションを行う情報処理装置は、同一の情報処理装置である必要はなく、施設内の機器群の機器群3次元実態形状CADデータや解体部位3次元実態形状CADデータを得るための処理を行う情報処理装置は処理能力が大きいデスクトップ型情報処理装置が好適であり、干渉シミュレーションを行う情報処理装置は携帯性に優れた小型情報処理装置が好適である。
【符号の説明】
【0039】
1…撮影装置、1a…電動雲台、1b…小型電子カメラ、1c…光波測距儀、2…情報処理装置、3…施設、4…基準マーカ、5…設置機器、5a…解体対象機器、5a1…解体部位、6…サイコロマーカ、6a…直方体基材、6b…マーク。
【技術分野】
【0001】
本発明は、複数の機器が設置された施設における解体対象機器を解体して施設内に仮置きし、搬送するときに該解体対象機器が施設内の他の設置機器への衝突(干渉)の有無をシミュレーションする施設解体支援方法及び装置に関する。
【背景技術】
【0002】
複数の機器が設置された施設における解体対象機器を解体して施設内に仮置きし、搬送するときに該解体対象機器が施設内の他の設置機器に衝突(干渉)するかどうか確認するシミュレーションを行う施設解体支援方法は、施設建設に使用した施設空間と該施設内における設置機器と該設置機器の設置態様のCADデータを使用し、解体対象機器のCADデータを選択して該解体対象機器CADデータと施設空間CADデータと機器設置態様CADデータによって施設解体作業領域の解体作業用CADデータを作成し、この解体作業用CADデータを使用して、解体対象機器の解体、仮置き、搬送するときの他の設置機器との干渉の有無をシミュレーションするようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−149311号公報
【特許文献2】特開2004−201085号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の施設解体支援方法における前記シミュレーション方法では、取り扱う施設建設用CADデータは、様々なデータ形式で保存され、その量が多いことから、小型の情報処理装置(携帯型コンピュータ)を用いて効率良く実行することが困難であった。
【0005】
また、解体作業用CADデータの作成には、過去に作成された複数の建設用CADデータを収集しなければならないことから、解体作業用CADデータの作成作業が面倒であった。
【0006】
従って、本発明の1つの目的は、施設解体時の解体部位搬送における干渉シミュレーションを効率良く実行することができるようにすることにある。
【0007】
本発明の他の目的は、取り扱うデータの量を少なくして小型の携帯型情報処理装置を用いて施設解体支援における干渉シミュレーションを効率良く実行することができるようにすることにある。
【0008】
更に他の目的は、過去に作成された建設用CADデータを使用することなく解体作業用のCADデータ(3次元実態形状情報)を作成して干渉シミュレーションを行うことができる施設解体支援方法を実現することにある。
【課題を解決するための手段】
【0009】
本発明は、解体施設の現場を計測して得た解体現場計測データを使用して小型の携帯型情報処理装置で取り扱うのに適した量の解体現場の解体シミュレーション用の3次元実態形状CADデータを作成し、この解体シミュレーション用の3次元実態形状CADデータを使用して干渉シミュレーションを行う施設解体支援方法であり、
具体的には、複数の機器が設置された施設における解体対象機器を解体して施設内に仮置き、搬送するときに該解体対象機器が施設内の他の機器と衝突(干渉)するかどうかをシミュレーションする施設解体支援方法において、
光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状計測情報を得る機器群3次元実態形状計測ステップと、
機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報(機器群3次元実態形状CADデータ)を作成する機器群3次元実態形状情報作成ステップと、
施設内の機器群の機器群3次元実態形状情報から解体対象機器の解体部位を選択し、解体部位3次元実態形状情報(解体部位3次元実態形状CADデータ)を得る解体部位3次元実態形状情報選択ステップと、
解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーションステップと
を行うことを特徴とする。
【0010】
なお、本説明では、レーザ照射によって得られる施設内の機器群の形状を構成する個々の点情報を計測画素と表現する。
【0011】
そして、前記機器群3次元実態形状計測ステップは、前記レーザ照射を施設内の複数の位置から行って取得した計測画素毎の距離情報を統合することで施設内の機器群の機器群3次元実態形状計測情報を得ることを特徴とする。
【0012】
また、前記計測画素は、所定の距離情報領域を区画して該区画内に位置する複数の実計測画素の重心位置を求め、求めた重心位置を計測画素としてデータ量を削減することを特徴とする。
【0013】
また、前記機器群3次元実態形状計測ステップにおいて得た機器群3次元実態形状計測情報における計測画素に電子カメラで施設内を撮影して得た撮影画像情報に基づいて色情報を付加することを特徴とする。
【0014】
また、前記干渉シミュレーションステップにおける解体部位3次元実態形状情報の移動は、施設内に配置したサイコロマーカを電子カメラで撮影して得たサイコロマーカ位置情報に対応させて行うことを特徴とする。
【発明の効果】
【0015】
本発明は、光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を生成し、この機器群3次元実態形状情報から解体対象機器の解体部位を選択して解体部位3次元実態形状情報を作成し、この機器群3次元実態形状情報と解体部位3次元実態形状情報を使用して解体部位の解体、仮置き、運搬するときの施設内の他の機器との干渉をシミュレーションするようにしたので、取り扱うデータの量を少なくすることができ、小型の情報処理装置を用いて施設解体支援における干渉シミュレーションを効率良く実行することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施例における施設解体支援装置のブロック図である。
【図2】本発明の実施例における施設解体支援方法の手順を示すフローチャートである。
【図3】本発明の実施例において施設内の解体作業領域の3次元実態形状CADデータを作成するための撮影手順を示す模式図である。
【図4】本発明の実施例において施設内における解体部位搬送での干渉確認の手順を示す模式図である。
【図5】本発明の実施例において使用するサイコロマーカの斜視図である。
【発明を実施するための形態】
【0017】
本発明の施設解体支援方法は、複数の機器が設置された施設における解体対象機器を解体して施設内に仮置き、搬送するときに該解体対象機器が施設内の他の機器と衝突(干渉)するかどうかをシミュレーションする施設解体支援方法において、
光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を得る機器群3次元実態形状計測ステップと、
機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報を作成する機器群3次元実態形状情報作成ステップと、
施設内の機器群の機器群3次元実態形状情報から解体対象機器の解体部位を選択し、解体部位3次元実態形状情報を得る解体部位3次元実態形状情報選択ステップと、
解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーションステップと、
を行うことにより実現する。
【実施例】
【0018】
この実施例における施設解体支援装置は、図1に示すように、電動雲台1aに小型電子カメラ1bと光波測距儀(レーザレンジファインダ)1cを取り付けて構成した撮影装置1と、この撮影装置1によって得た撮影画像データのデータ処理機能と画像表示機能とデータ記憶機能を有する情報処理装置2を備える。
【0019】
そして、この実施例における施設解体支援方法は、前記施設解体支援装置を用いて、基本的には、次のような手順で実行する。図2を参照して説明する。
【0020】
ステップS1
図3に示すように、施設3内を複数個所から撮影装置1の小型電子カメラ1bで撮影して得た施設内に設置された基準マーカ4と設置機器5の撮影画像データを情報処理装置2で処理することにより該施設内における小型電子カメラ1bのトラッキングを行う。また、施設3内を複数個所から撮影装置1の光波測距儀1cによりレーザ照射することによって取得した該施設内の機器群の形状に対応する計測画素毎の計測距離データを統合して該施設内の機器群の機器群3次元実態形状情報である機器群3次元実態形状CADデータを生成する。この機器群3次元実態形状CADデータは、データ量が多いと、干渉シミュレーションにおいて使用する情報処理装置2におけるデータ処理負荷が大きくなって効率的なシミュレーションが阻害されることからデータ量を削減する処理を施す。このデータ量削減方法については、後述する。そして、小型電子カメラ1bによって施設内に設置された基準マーカ4と設置機器5を撮影して取得した撮影画像データにより前記機器群3次元実態形状CADデータに色情報を付加する。小型電子カメラ1bによる撮影と、光波測距儀1cによる計測は、別々に行うことが可能である。
【0021】
ステップS2
記憶した施設3内の解体作業領域の機器群3次元実態形状CADデータを画像表示させて解体対象機器5aにおける解体部位5a1を指定することにより解体部位3次元実態形状情報である解体部位3次元実態形状CADデータを特定(抽出)して記憶する。
【0022】
ステップS3
解体作業領域の機器群及び解体対象機器5aにおける解体部位5a1の3次元実態形状CADデータを実装した施設解体支援装置を解体作業現場に搬入する。
【0023】
ステップS4
図4に示すように、解体対象機器5a及び基準マーカ4が小型電子カメラ1bの撮影視界に入るように電動雲台1aを設置し、小型電子カメラ1bにより解体対象機器5aと基準マーカ4を含む解体作業領域を撮影し、撮影画像を表示すると共に、基準マーカ撮影画像データに基づいてカメラ位置と向きを求め、解体作業領域の機器群3次元実態形状CADデータから解体対象機器5aの解体部位3次元実態形状CADデータを読み出して解体部位画像として前記カメラ位置と向きに対応させて撮影画像に重畳させて表示する。
【0024】
ステップS5
解体作業現場の解体対象機器5aの解体部位5a1の移動位置(仮置き位置)(解体作業現場における3次元空間のX軸、Y軸、Z軸に平行な位置)に対応させて、サイコロマーカ6を設置する。このサイコロマーカ6の設置は、作業者が手作業で行う。このサイコロマーカ6は、図5に示すように、直方体基材6aの6面に該直方体基材6aの位置と姿勢(解体作業現場における3次元空間のX軸、Y軸、Z軸における回転角度)を画像認識によって計測するためのマーク6bを付した構成である。
【0025】
ステップS6
設置されたサイコロマーカ6を小型電子カメラ1bで撮影し、サイコロマーカ撮影画像データに基づいてサイコロマーカ6の位置と姿勢を求める。
【0026】
ステップS7
サイコロマーカ6の位置と姿勢に対応させて解体対象機器5aの解体部位3次元実態形状CADデータの解体部位画像表示位置を移動する。
【0027】
ステップS8
サイコロマーカ6の位置と姿勢に対応させて表示した解体部位が該位置の周囲に位置する他の機器に干渉(衝突)するかどうかを確認する。この干渉確認は、解体作業領域の機器群3次元実態形状CADデータと解体部位3次元実態形状CADデータを対比させ、同一位置に両者の部位が存在するかどうかを照合することにより行う。
【0028】
ステップS9
干渉部位が存在するときには、干渉部位を作業者が視覚的に注目することができる色に着色表示する。この干渉部位の着色表示により、作業者は、サイコロマーカ6の姿勢及び/又は位置を変える必要性を認識し、着色表示された干渉部位を参考にしてサイコロマーカ6の姿勢及び/又は位置を変更する。
【0029】
ステップS10
干渉部分が存在しない(なくなった)ときには、そのときのサイコロマーカ6の位置と姿勢を記憶する。
また、ステップS9における干渉部位が存在するときにも、随時、そのときのサイコロマーカ6の位置と姿勢を記憶することができる。
【0030】
ステップS11
サイコロマーカ6の位置が解体部位搬送道順の最終位置かどうかを確認し、最終位置であれば処理を終了し、次の移動位置があれば次のステップに進む。
【0031】
ステップS12
サイコロマーカ6を搬送道順の次の位置へ移動してステップS6からの処理に戻る。
【0032】
ステップS13
ステップS9においてサイコロマーカ6の姿勢または位置を変更した後に変更後のサイコロマーカ6が小型電子カメラ1bの撮影視界内にあるかどうかを確認し、撮影視界内であればステップS6に戻る。
【0033】
ステップS14
位置変更によってサイコロマーカ6が小型電子カメラ1bの撮影視界に入らなくなったときには、サイコロマーカ6が撮影視界に入る位置に電動雲台1aを移動させる。そして、ステップS4に戻って、基準マーカ4を撮影してカメラ位置と向きを測定することにより撮影画像と解体作業領域の機器群3次元実態形状CADデータとの対応関係を整合させる。
【0034】
このようにして解体部位5a1を搬送する道順について干渉確認し、干渉が起こらないサイコロマーカ位置と姿勢を記憶することにより、施設3内の解体対象機器5aの解体部位5a1を解体して仮置き、搬送するときに施設3内の他の機器5と干渉しないようにする道順(位置)と解体部位5a1の姿勢情報を情報処理装置2に保持することができ、実際に解体対象機器5aを解体して仮置き、搬送するときにこの情報を読み出して解体部位5a1の仮置き、搬送における各位置と姿勢を画像表示することにより解体作業を支援することができる。
【0035】
解体作業領域の機器群3次元実態形状CADデータ作成は、具体的には、次のようにして行う。
【0036】
施設3内を複数個所から撮影するときの撮影装置1の各位置と姿勢の情報は、施設3内の予め定めた既知の位置に設置した基準マーカ4を小型電子カメラ1bで撮影することにより得た撮影画像データにおける基準マーカ4の写り込み位置を情報処理装置2で解析することにより求める。そして、解体作業領域の機器群3次元実態形状CADデータは、複数個所から光波測距儀1cにより施設3内の設置機器5の各部位の3次元計測を行い、複数個所からの計測で取得した各計測画素データをスムージング処理し、ICP(Iterative Closes Point)アルゴリズムを用いて統合処理し、所定の距離情報領域毎に区画して該区画内に位置する複数の実計測画素の重心位置を求め、求めた重心位置を計測画素存在位置とすることにより機器群の3次元実態形状を大きく変えることなくデータ量を削減することにより干渉シミュレーションを行うときに小型の携帯型情報処理装置で取り扱うのに適したデータ量とするように作成する。
【0037】
また、解体対象機器5における解体部位5a1の解体部位3次元実態形状CADデータの作成は、解体作業領域の機器群3次元実態形状CADデータから解体対象機器5aの領域を選択して画像表示させ、表示画像上で解体対象機器5aにおける切断部分(解体部位)をマウス等により指示することにより指示範囲に含まれる解体対象機器5の3次元実態形状CADデータを切り出(抽出)して解体部位3次元実態CADデータとするように行う。
【0038】
施設内の機器群の機器群3次元実態形状CADデータや解体部位3次元実態形状CADデータを得るための処理を行う情報処理装置と干渉シミュレーションを行う情報処理装置は、同一の情報処理装置である必要はなく、施設内の機器群の機器群3次元実態形状CADデータや解体部位3次元実態形状CADデータを得るための処理を行う情報処理装置は処理能力が大きいデスクトップ型情報処理装置が好適であり、干渉シミュレーションを行う情報処理装置は携帯性に優れた小型情報処理装置が好適である。
【符号の説明】
【0039】
1…撮影装置、1a…電動雲台、1b…小型電子カメラ、1c…光波測距儀、2…情報処理装置、3…施設、4…基準マーカ、5…設置機器、5a…解体対象機器、5a1…解体部位、6…サイコロマーカ、6a…直方体基材、6b…マーク。
【特許請求の範囲】
【請求項1】
複数の機器が設置された施設における解体対象機器を解体して施設内に仮置き、搬送するときに該解体対象機器が施設内の他の機器と衝突(干渉)するかどうかをシミュレーションする施設解体支援方法において、
光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を得る機器群3次元実態形状計測ステップと、
機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報を作成する機器群3次元実態形状情報作成ステップと、
施設内の機器群の機器群3次元実態形状情報から解体対象機器の解体部位を選択し、解体部位3次元実態形状情報を得る解体部位3次元実態形状情報選択ステップと、
解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーションステップと
を行うことを特徴とする施設解体支援方法。
【請求項2】
請求項1において、前記機器群3次元実態形状計測ステップは、前記レーザ照射を施設内の複数の位置から行って取得した計測画素毎の距離情報を統合することで施設内の機器群の機器群3次元実態形状情報を得ることを特徴とする施設解体支援方法。
【請求項3】
請求項1において、前記計測画素は、所定の距離情報領域を区画して該区画内に位置する複数の実計測画素の重心位置を求め、求めた重心位置を計測画素としてデータ量を削減することを特徴とする施設解体支援方法。
【請求項4】
請求項1において、前記機器群3次元実態形状計測ステップにおいて得た機器群3次元実態形状情報における計測画素に電子カメラで施設内を撮影して得た撮影画像情報に基づいて色情報を付加することを特徴とする施設解体支援方法。
【請求項5】
請求項1において、前記干渉シミュレーションステップにおける解体部位3次元実態形状情報の移動は、施設内に配置したサイコロマーカを電子カメラで撮影して得たサイコロマーカ位置情報に対応させて行うことを特徴とする施設解体支援方法。
【請求項6】
複数の機器が設置された施設における解体対象機器を解体して施設内に仮置き、搬送するときに該解体対象機器が施設内の他の機器と衝突(干渉)するかどうかをシミュレーションする施設解体支援装置において、
光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を得る機器群3次元実態形状計測手段と、
機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報を作成する機器群3次元実態形状情報作成手段と、
施設内の機器群の機器群3次元実態形状情報から解体対象機器の解体部位を選択し、解体部位3次元実態形状情報を得る解体部位3次元実態形状情報選択手段と、
解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーション手段と
を備えたことを特徴とする施設解体支援装置。
【請求項1】
複数の機器が設置された施設における解体対象機器を解体して施設内に仮置き、搬送するときに該解体対象機器が施設内の他の機器と衝突(干渉)するかどうかをシミュレーションする施設解体支援方法において、
光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を得る機器群3次元実態形状計測ステップと、
機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報を作成する機器群3次元実態形状情報作成ステップと、
施設内の機器群の機器群3次元実態形状情報から解体対象機器の解体部位を選択し、解体部位3次元実態形状情報を得る解体部位3次元実態形状情報選択ステップと、
解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーションステップと
を行うことを特徴とする施設解体支援方法。
【請求項2】
請求項1において、前記機器群3次元実態形状計測ステップは、前記レーザ照射を施設内の複数の位置から行って取得した計測画素毎の距離情報を統合することで施設内の機器群の機器群3次元実態形状情報を得ることを特徴とする施設解体支援方法。
【請求項3】
請求項1において、前記計測画素は、所定の距離情報領域を区画して該区画内に位置する複数の実計測画素の重心位置を求め、求めた重心位置を計測画素としてデータ量を削減することを特徴とする施設解体支援方法。
【請求項4】
請求項1において、前記機器群3次元実態形状計測ステップにおいて得た機器群3次元実態形状情報における計測画素に電子カメラで施設内を撮影して得た撮影画像情報に基づいて色情報を付加することを特徴とする施設解体支援方法。
【請求項5】
請求項1において、前記干渉シミュレーションステップにおける解体部位3次元実態形状情報の移動は、施設内に配置したサイコロマーカを電子カメラで撮影して得たサイコロマーカ位置情報に対応させて行うことを特徴とする施設解体支援方法。
【請求項6】
複数の機器が設置された施設における解体対象機器を解体して施設内に仮置き、搬送するときに該解体対象機器が施設内の他の機器と衝突(干渉)するかどうかをシミュレーションする施設解体支援装置において、
光波測距儀によるレーザ照射によって得られる施設内の機器群の形状を計測画素毎の距離情報として取得することで該施設内の機器群の機器群3次元実態形状情報を得る機器群3次元実態形状計測手段と、
機器群3次元実態形状計測情報に基づいて施設内の機器群の機器群3次元実態形状情報を作成する機器群3次元実態形状情報作成手段と、
施設内の機器群の機器群3次元実態形状情報から解体対象機器の解体部位を選択し、解体部位3次元実態形状情報を得る解体部位3次元実態形状情報選択手段と、
解体部位3次元実態形状情報を移動させ、各移動位置において機器群3次元実態形状情報と解体部位3次元実態形状情報を対比させて情報位置を照合することにより、解体部位と施設内の他の機器の干渉をシミュレーションする干渉シミュレーション手段と
を備えたことを特徴とする施設解体支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−16055(P2013−16055A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−148932(P2011−148932)
【出願日】平成23年7月5日(2011.7.5)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成23年3月3日 精密工学会主催の「動的画像処理実利用化ワークショップ2011」において文書をもって発表
【出願人】(505374783)独立行政法人日本原子力研究開発機構 (727)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月5日(2011.7.5)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成23年3月3日 精密工学会主催の「動的画像処理実利用化ワークショップ2011」において文書をもって発表
【出願人】(505374783)独立行政法人日本原子力研究開発機構 (727)
【Fターム(参考)】
[ Back to top ]