
施設退出案内システム及び施設退出案内プログラム

【課題】施設内から出口を通じて施設外の道路へ退出しようとした際に、その出口手前で報知される退出後案内ができるだけ適切となるような技術の提供。
【解決手段】自車両が接近中の出口である接近対象出口から退出しようとしている退出前状態と推定された場合に、道路情報に基づく接近対象出口からの退出後の進行方向の案内である退出後案内情報を接近対象出口からの退出前に音声報知する音声報知部と、先の退出後案内情報の報知後に、再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定する再報知判定部とが備えられている。再報知判定部は、再度の退出後案内情報の内容が先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知とし、先の退出後案内情報の報知後に行われた自車両の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には報知とする。
【解決手段】自車両が接近中の出口である接近対象出口から退出しようとしている退出前状態と推定された場合に、道路情報に基づく接近対象出口からの退出後の進行方向の案内である退出後案内情報を接近対象出口からの退出前に音声報知する音声報知部と、先の退出後案内情報の報知後に、再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定する再報知判定部とが備えられている。再報知判定部は、再度の退出後案内情報の内容が先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知とし、先の退出後案内情報の報知後に行われた自車両の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には報知とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駐車場などの施設内において施設の出口から進入する道路での走行方向の案内を行うことができる技術に関する。
【背景技術】
【0002】
従来、例えば、特許文献1には、自車両の位置する施設の施設外の道路と施設内の道路とが接続関係にある接続地点を特定し、自車両の進行方向に対する接続地点の方向を案内するナビゲーション装置が記載されている。この装置では、自車両が施設出口案内ポイントに接近したか否か(例えば、自車両位置から施設出口案内ポイントまでの距離が所定距離以内となったか否か)を判定する。ここで、肯定判定される場合には、自車両が施設出口案内ポイントから退出する前に、所定経路へ向かう方向を案内する出口分岐案内(出口からの退出後の進行方向の案内である退出後案内)を行う。その際、施設出口案内ポイントの左方向に案内経路が存在する場合には、表示装置10による画面表示や音声によるメッセージ(例えば、「出口を左方向に進んで下さい。」)を出力して案内する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−51999号公報(段落番号0003−0025、0042−0055、図6)
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような従来の装置では、運転者は、施設内から出口を通じて施設外の道路へ退出しようとした場合、その道路に入った際にどの方向に進めばよいかを施設内の出口手前の地点で把握することができる。しかしながら、その施設から外の道路に退出する出口が複数あり、所望する出口への途中に他の出口が存在する場合等に、出口の手前に達する毎に同じような退出後案内を聞かされると、煩わしく感じるという問題が生じる。
そこで、出口手前で報知される退出後案内ができるだけ適切となるような技術が要望される。
【課題を解決するための手段】
【0005】
本発明に係る施設退出案内システムの特徴構成は、
自車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、
前記車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定されたことに基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する退出前状態検知部と、
前記接近対象出口と接続する道路の情報を含む道路情報を取得する道路情報取得部と、
前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知する音声報知部と、
先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定する再報知判定部と、を備え、
前記再報知判定部は、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の進路変更の方向が当該先の退出後案内情報により案内した進行方向(道路進入方向)と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定することである。
【0006】
この構成によれば、退出目的の特定出口への走行途中に存在する出口で退出後案内情報が音声報知されることで、運転者は退出目的の特定出口から退出した後の道路への進入方向(右折又は左折)が報知されたと認識することができ、そのままその出口を通過して目的の出口に到達したときには、先に通り過ぎた出口と同じ退出後案内情報が音声報知されないので、従来の煩わしさは解消される。一方、退出しない出口を通り過ぎたのちに行われた進路変更が退出後案内情報での道路への進入方向と同じである場合には、その進路変更によって、先ほど音声報知された進路変更が完了したと運転者が感じる可能性があるので、次の出口(退出目的の特定出口である可能性がより高くなっている)の手前でも、退出後案内情報が音声で行われる。つまり、基本的には、一度出口の手前で退出後案内情報が音声報知されると、次の出口では、その後に生成される退出後案内情報の内容が先の退出後案内情報と同じであれば、その音声報知は禁止される。但し、例外として、その途中で行われた進路変更の方向が先の退出後案内情報により案内した方向と同じであれば、その音声報知は禁止されない。これにより、駐車場などの施設に備えられた複数の出口の一つに自車両が接近した後、当該出口から退出することなく、再び他の出口又は同じ出口に接近するような場合において、出口に接近する毎に同じような退出後案内を聞かされるという煩わしさは低減する。
【0007】
この例外としての、退出目的の特定入口までの走行途中で行われた、先の退出後案内情報により案内した進行方向と同じ方向での進路変更(左折又は右折)に関しては、最初の進路変更だけを例外処理の判定対象とする制御と、全ての進路変更を例外処理の判定対象とする制御を考えることができる。最初に音声報知された退出後案内情報によって運転者が認識している進路変更が、施設内通路での同様な進路変更で完了したと感じてしまう傾向があるということを考慮すると、最初の進路変更だけを例外処理の判定対象とすることが好ましい。しかしながら、本発明では、これに限定しているわけではなく、全ての進路変更を例外処理の判定対象とする制御も含んでいる。
【0008】
上記再報知禁止条件を具体化した好適な実施形態の一つでは、前記再報知禁止条件を、前記先の退出後案内情報に係る前記接近対象出口に接続する道路と、前記再度の退出後案内情報に係る前記接近対象出口に接続する道路とが同じ道路であることとしている。これにより、退出しようとする出口に接続している道路と、先に退出後案内情報が報知された出口に接続している道路とが異なるために、運転者が再度の案内を望む可能性があるにもかかわらず、この退出しようとする出口の手前での退出後案内情報が報知されないという不都合が解消される。
【0009】
また、退出しなかった先の出口の手前で退出後案内情報が報知されたとしても、その後の施設内での退出走行の時間や走行距離が長くなると、先に報知された退出後案内情報に対する運転者の意識が薄れてくる。このため、そのような状況下では、新たな出口が接近した場合には、退出後案内情報を報知した方が、運転者に対して好都合となる。このような観点から、上記再報知禁止条件を具体化した別な好適実施形態では、前記再報知禁止条件を、前記先の退出後案内情報の報知から前記再度の退出前状態の推定までの間の経過時間が所定時間を超えていること、又は、前記先の退出後案内情報の報知から前記再度の退出前状態の推定までの間の走行距離が所定距離を超えていること、あるいはその両方であることとしている。
【0010】
さらに、本発明は、駐車場などの施設内において施設の出口から向かうべき方向の案内を行う施設退出案内方法や施設退出案内プログラムも権利対象としている。例えば、そのような施設退出案内方法は、自車両の現在位置を表す車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定するとともに、当該判定に基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定するステップと、前記接近対象出口と接続する道路の情報を含む道路情報を取得するステップと、前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知するステップと、先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定するにあたって、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定するステップと、を備えている。
また、施設退出案内プログラムは、 自車両の現在位置を表す車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定するとともに、当該判定に基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する機能と、前記接近対象出口と接続する道路の情報を含む道路情報を取得する機能と、前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知する機能と、先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定するにあたって、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定する機能とをコンピュータに実行させる。当然ながら、このような施設退出案内方法や施設退出案内プログラムも上述した施設退出案内システムで述べた作用効果を得ることができ、さらにその好適な実施形態として述べたいくつかの付加的技術を組み込むことも可能である。
【図面の簡単な説明】
【0011】
【図1】本発明による施設退出案内システム、施設退出案内プログラム、施設退出案内方法で用いられる基本的な原理を、駐車場内の車両がその駐車場から出て行く様子を例として、模式的に示している説明図である。
【図2】本発明による施設退出案内システムを採用した車両用ナビゲーション装置の機能ブロック図である。
【図3】図2に示す車両用ナビゲーション装置における施設退出案内システムの機能を示す機能ブロック図である。
【図4】施設退出案内システムにおける第1実施形態の制御の一例を示すフローチャートである。
【図5】施設退出案内システムにおける第2実施形態の制御の一例を模式的に示している説明図である。
【図6】施設退出案内システムにおける第2実施形態の制御の別例を模式的に示している説明図である。
【図7】施設退出案内システムにおける第2実施形態の制御を示すフローチャートである。
【発明を実施するための形態】
【0012】
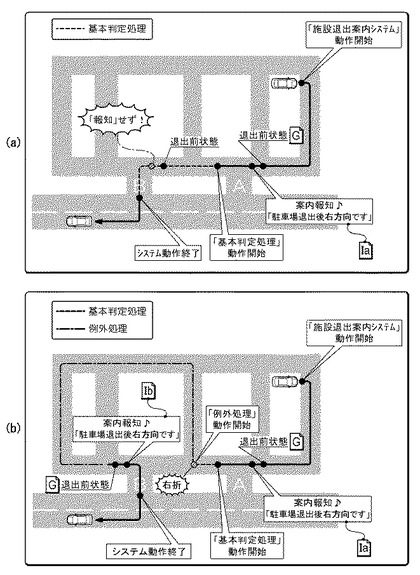
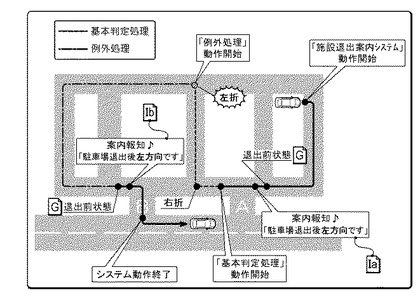
本発明による施設退出案内システムの具体的な実施形態を説明する前に、その基本的な原理を、図1を用いて説明する。図1は、本発明による施設退出案内システムにおける基本的な情報の流れを、駐車場内の車両がその駐車場から出て行く様子を一例として取り上げ、それを模式的に示している。図1の(a)は基本判定処理が動作している状況を示しており、図1の(b)は基本判定処理から例外処理に移行する状況を示している。この図に示された駐車場の平面図では、入口は省略されており、同じ道路に接続している2つの駐車場出口が示されている。
まず、図示されていない入口から進入した車両は、適当な空き駐車スペースに駐車する。駐車目的が終わると、エンジンを起動し、退出走行を始める。退出走行が始まると、施設退出案内システムが動作する。施設退出案内システムは、駐車場施設に備えられた複数の出口の一つに車両が接近すると、これに基づいて、車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態(図ではGで示されている)であることを推定する。この推定に応答して、出口Aからの退出後の道路に対する進行方向の案内(図では「右方向」)である退出後案内情報(図ではIaで示されている)が、この出口Aの手前で音声報知される。
【0013】
しかしながら、出口Aが退出目的の出口でなければ、車両は出口Aをから退出せずにこの出口Aを通り過ぎる(出口非退出通過)。この場合、車両はまだ施設内を走行していることになるので、施設退出案内システムは車両の次の出口への接近を監視する。同時に、次の出口での再度の退出後案内情報の内容が先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には退出後案内情報の報知を禁じる基本判定処理が動作するが、この基本判定処理は、状況によっては、退出後案内情報の報知を行う例外処理に移行する。つまり、
(1)図1(a)参照
出口非退出通過後の走行において、次の出口Bに車両が接近した際に再度の退出後案内情報の内容が先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には基本判定処理が動作するので、出口Bからの退出後の道路に対する進行方向の案内である退出後案内情報が音声報知されない。
(2)図1(b)参照
出口非退出通過後の走行において、駐車場走行路に沿った進路変更が行われると、その進路変更方向(左折又は右折)が例外処理の判定対象となる。この例外処理への移行判定では、チェックされた進路変更方向と先に報知された退出後案内情報に含まれている道路への進入方向(図では右折)が一致するかどうか比較される。この比較で、両方の方向が一致した場合、基本判定処理に代わって、次の出口での退出後案内情報の報知を行う例外処理が動作する。次の出口Bに車両が接近した際に例外処理が動作しているので、退出後案内情報(図ではIbで示されている)が音声報知される。
このように、(1)の場合では、同じ内容の退出後案内情報が複数回音声報知されることがないので、出口に接近する毎に同じ退出後案内情報が繰り返されるという煩わしさは解消される。また、退出後案内情報により案内した進行方向と同じ方向への進路変更を途中走行において行った場合は、再度の退出後案内情報の音声報知が有意義となるので、次の出口手前でも退出後案内情報が音声報知される。
【0014】
つまり、基本判定処理では、再度の退出後案内情報の内容が先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合にはその退出後案内情報は「非報知」と判定される。先の退出後案内情報の報知後に行われた車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合に実行される例外処理では、基本判定処理による判定結果に関わらず「報知」と判定される。いずれにしても、最終的に、退出目的の出口(図では出口B)から車両が駐車場を出て、道路に入ると、この施設退出案内システムの動作は終了する。
【0015】
なお、上記記載での再報知禁止条件の好適例として、先の退出後案内情報と後の退出後案内情報とが対象とする出口退出後の道路が同一であること、先の出口を非退出通過した後の(出口通過後の)走行時間が所定値を下回っていること、先の出口を非退出通過した後の走行距離が所定値を下回っていることなどが挙げられる。従って、退出後案内の対象となる道路が先の退出後案内の対象とする道路と異なっている場合は、基本判定処理が適用されず、退出後案内情報が報知される。また、先の出口を非退出通過した後の走行時間や走行距離が所定値を越えた場合は、基本判定処理の適用がなくなり、この制御ルーチンは最初に戻って繰り返される。なお、再報知禁止条件とは別に、再度の退出後案内情報の内容が先の退出後案内情報の内容と異なる場合にも、基本判定処理が適用されず、再度の退出後案内情報が報知される。
【0016】
〔第1実施形態〕
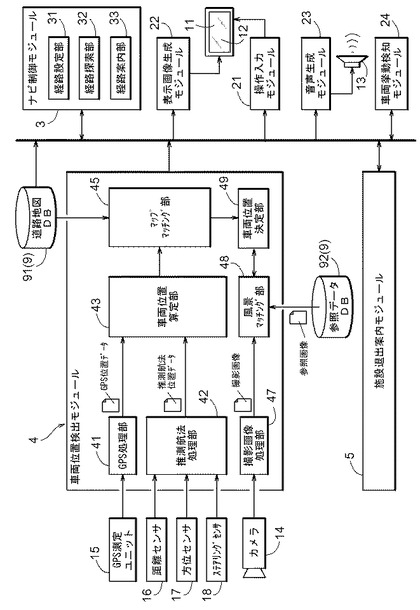
上述した基本原理に基づいて動作する施設退出案内システムを採用した車両用ナビゲーション装置の一例を示す機能ブロック図が図2に示されている。この車両用ナビゲーション装置は、GPSを用いた位置測定機能と推測航法による位置測定機能とによって算定された自車両位置(以下単に車両位置と称する)を、風景画像認識に基づいて修正する機能を備えている。このため、風景画像認識のために予め作成された参照画像がデータベース化されて参照画像DB92に格納されている。図2には、そのような車両用ナビゲーション装置を車載LANに組み込んだ形態で示した機能ブロック図が示されている。この車両用ナビゲーション装置は、操作入力モジュール21、ナビ制御モジュール3、車両位置検出モジュール4、施設退出案内モジュール5、上記の参照画像DB92と道路地図データを収納した道路地図データベース91(以下単に道路地図DBと略称する)とを有するデータベース9を備えている。
【0017】
ナビ制御モジュール3は、経路設定部31、経路探索部32、経路案内部33を備えている。経路設定部31は、例えば車両位置等の出発地、入力された目的地、通過地点や走行条件(高速道路の使用有無など)を設定する。経路探索部32は、経路設定部31によって設定された条件に基づき出発地から目的地までの案内経路を探索するための演算処理を行う処理部である。経路案内部33は、経路探索部32により探索された出発地から目的地までの経路に従って、モニタ12の表示画面による案内表示やスピーカ13による音声案内等により、運転者に対して適切な経路案内を行うための演算処理を行う処理部である。
【0018】
車両位置検出モジュール4は、従来のGPSによる位置算定及び推測航法による位置算定によって得られた推定車両位置を、この推定車両位置を利用した風景画像認識によって決定された車両位置で修正する機能を有する。車両位置検出モジュール4は、GPS処理部41、推測航法処理部42、車両位置算定部43、マップマッチング部45、撮影画像処理部47、風景マッチング部48、車両位置決定部49を備えている。GPS処理部41にはGPS衛星からのGPS信号を受信するGPS測定ユニット15が接続されている。GPS処理部41はGPS測定ユニット15で受信されたGPS衛星からの信号を解析し、車両の現在位置(緯度及び経度)を算定し、GPS位置データとして車両位置算定部43に送る。推測航法処理部42には距離センサ16と方位センサ17が接続されている。距離センサ16は、車両の車速や移動距離を検出するセンサである。距離センサ16は、その検出結果としての車速及び移動距離の情報を推測航法処理部42へ出力する。方位センサ17は車両の進行方位の情報を推測航法処理部42へ出力する。推測航法処理部42は、刻々と送られてくる移動距離情報と方位情報とに基づいて推測航法位置を演算し、推測航法位置データとして車両位置算定部43に送る。車両位置算定部43は、GPS位置データと推測航法位置データとから公知の方法により車両の位置を特定する演算を行う。算定された車両位置情報は、測定誤差等を含んだ情報となっており、場合によっては道路上から外れてしまうので、マップマッチング部45により、車両位置を道路地図に示される道路上とする補正が行われる。そのような補正後の車両位置情報は推定車両位置情報として車両位置決定部49に送られる。
【0019】
撮影画像処理部47は、車載カメラ14によって撮影された車両からの前方風景撮影画像から画像認識(ここでは画像マッチング)に適した認識用撮影画像を生成する。風景マッチング部48は、参照画像DB92から抽出した参照画像と撮影画像処理部47から出力された認識用撮影画像とのマッチングを行う。パターンマッチングが成功した場合には、マッチングパターンである参照画像に関係付けられた撮影位置が読み出される。この撮影位置が車両位置として決定され、車両位置決定部49に転送される。車両位置決定部49は転送されてきた車両位置を推定車両位置と置き換える車両位置修正を行う。参照画像には、例えば、駐車場の入口付近や出口付近の画像なども含まれており、それらの参照画像と認識用撮影画像とのマッチングに基づいて、自車両が駐車場の入口や出口に接近したことが判定される。すなわち、車両位置決定部49は、自車両が駐車場の入口や出口に接近したと判定した場合には、その旨を示す情報を車両位置情報に含めて出力する。
【0020】
この車両用ナビゲーション装置は、また、周辺装置として、タッチパネル11やスイッチなどの入力デバイスを通じての操作入力を適切な操作信号に変換して内部に転送する操作入力モジュール21、モニタ12に各種案内処理に必要な画像情報を表示するための表示モジュール22、スピーカ13やブザーから各種案内処理に必要な音声情報を流す音声生成モジュール23、ステアリング操作量や制動や加速などといった車両の種々の挙動の検出データを車両挙動情報に変換して内部に転送する車両挙動検知モジュール24を備えている。
【0021】
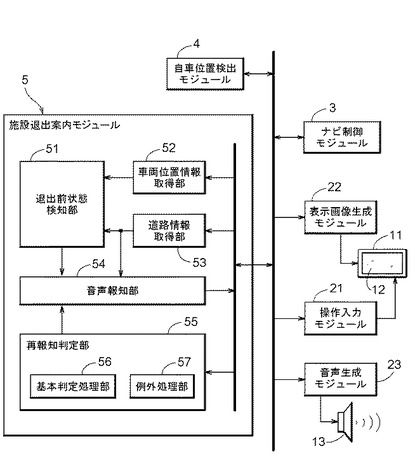
施設退出案内モジュール5は、駐車場などの施設内において施設の出口からの退出後の道路での進行方向の案内を行うために、図3に示すように、退出前状態検知部51と、車両位置情報取得部52と、道路情報取得部53と、音声報知部54と、再報知判定部55とを備えている。
【0022】
車両位置情報取得部52は、車両位置検出モジュール4から送られてきた、車両の現在位置を表す車両位置情報を取得して、退出前状態検知部51に与える。この車両位置情報には、駐車場などの施設の入口や出口に接近したことを示す情報も含まれており、この車両位置情報から自車両が駐車場の出口に接近したことを把握することができる。道路情報取得部53は、駐車場などの施設の入口や出口と接続している道路に関する道路情報を、車両位置情報に基づいて道路地図データベース91から取得する。退出前状態検知部51は、車両位置情報から、駐車場などの施設に備えられた複数の出口の一つに自車両が接近したと判定されたことに基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する。例えば、駐車場で駐車した後の走行開始によって駐車場からの退出走行であることを推定した場合、その退出走行において駐車場出口の手前所定距離に達すると、車両が退出前状態であることを音声報知部54等に知らせる。音声報知部54は、退出前状態検知部51による退出前状態の推定に応答して、道路情報に基づく接近対象出口からの退出後の進入道路における進行方向の案内である退出後案内情報を当該接近対象出口からの退出前に音声報知する。ここで、退出後案内情報による案内としては、例えば、「出口退出後右方向」「出口退出後左方向」「出口退出後直進」などがある。音声報知部54は、例えば、「駐車場退出後、右方向です。」のような音声案内を報知する。この音声報知部54における退出案内情報の生成及び音声生成モジュール23への送出の処理は、再報知判定部55の管理下で行われる。
【0023】
再報知判定部55は、経時的に先に行われた先の退出後案内情報の報知後に、退出前状態検知部51により退出前状態が推定されなくなった後に再び退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定する。ここで、退出前状態が推定されなくなったということは、車両が接近対象出口から退出したこと、あるいは車両が退出せずにその接近対象出口を通り過ぎたこと(出口非退出通過)を意味する。そしてその後、再び退出前状態が推定されたということは、車両が接近対象出口を非退出通過した後、次の出口の手前に到達したことを意味する。再報知判定部55は、再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、その例外処理として、先の退出後案内情報の報知後に行われた自車両の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、基本判定処理による判定結果に関わらず報知と判定する。このため、再報知判定部55には、基本判定処理を行う基本判定処理部56と、例外処理を行う例外処理部57が含まれている。基本判定処理部56は、施設からの退出走行において1つの出口を非退出通過した後、再び出口に接近した場合に、再度通知されようとする退出後案内情報の内容が先の退出後案内情報の内容と同じであれば、例えば、両方ともに「出口退出後左方向」という案内内容である場合、退出後案内情報の音声報知は中止する。例外処理部57は上述した基本判定処理部56による退出後案内情報の基本判定処理、すなわち音声報知中止の決定を無効化する機能を有している。例外処理部57は、退出後案内情報が音声報知された後の次の出口までの退出走行において、先に音声報知された退出後案内情報に含まれている出口退出後の道路進入時の進行方向(左折又は右折等)と同じ方向の進路変更が行われた際には、基本判定処理による退出後案内情報の音声報知中止の決定を取り消して、次に出口に接近した場合には退出後案内情報の音声報知を音声報知部54に指令する。
【0024】
再報知判定部55が取り扱っている、再報知禁止条件は、基本判定処理による退出後案内情報の音声報知中止の条件である。そのような再報知禁止条件の一つは、先の退出後案内情報に係る前記接近対象出口に接続する道路と、前記再度の退出後案内情報に係る前記接近対象出口に接続する道路とが同じ道路であるという条件である。先の退出後案内の情報において案内した道路と同じ道路に接続する出口に対しては、それら出口同士が道路と並行して設けられていることになるので、その出口から退出した後の進行方向の案内であるその退出後案内情報を行わなくても、退出後の道路進入時の進行方向を運転者が容易に理解できる可能性が高くなるからである。そのため、ここでは、退出後案内情報の再報知禁止を行う条件として、処理対象出口に接続する道路が同一であるという条件が設定されている。
【0025】
さらにこの実施形態では、再報知禁止条件として、先の退出後案内情報の報知から再度の退出前状態の推定までの間の経過時間が所定時間を超えているという経過時間制限に関する条件、及び先の退出後案内情報の報知から再度の退出前状態の推定までの間の走行距離が所定距離を超えているという走行距離制限に関する条件が設定されている。もちろん、経過時間制限に関する条件又は走行距離制限に関する条件のいずれか一方の条件だけを設定してもよい。退出後案内情報に基づく案内を聞いた後、長い時間、又は長い距離を走行することによって先の案内報知を忘れてしまうので、再度の報知をしても差し支えないし、また、再度の報知が必要となる可能性も高くなるからである。逆に言えば、このような経過時間制限に関する条件又は走行距離制限に関する条件が設定されていることにより、短い時間に複数回同じ案内がされる煩わしさが回避されるという利点がある。
【0026】
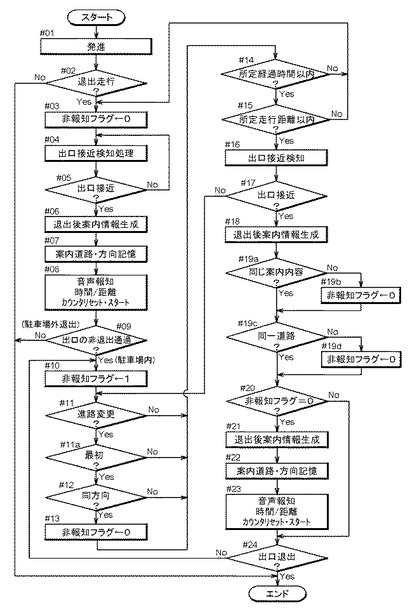
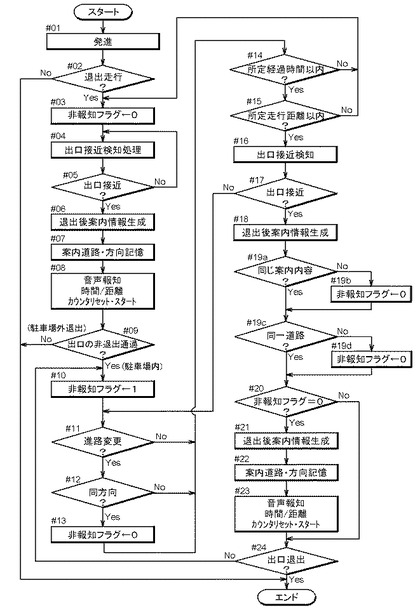
上述したように構成されたカーナビゲーションシステムにおける駐車場での施設退出案内制御の一例を図4のフローチャートを用いて説明する。この施設退出案内制御は実質的には施設退出案内モジュール5によって行われる。
まず、車両が駐車状態から発進すると(#01)、自車位置検出モジュール4で取得された車両位置情報や道路情報や、必要に応じて車両挙動情報などを用いて、車両が駐車場内において出口に向かう退出走行であるかどうかがチェックされる(#02)。ここで、退出走行でないと判断されると(#02No分岐)、この退出案内ルーチンは終了する。
【0027】
ステップ#02で退出走行であると判断されると、初期設定として、道路情報案内の非報知または報知を表す非報知フラグに「0」を設定する(#03)。なお、非報知フラグの「0」は報知を意味し、「1」は非報知を意味する。
【0028】
初期設定が終わると、退出前状態検知部51が、車両が出口から所定距離の地点に到達したかどうかを検知する出口接近検知処理を実行する(#04)。この出口接近検知処理における重要な演算である自車両が出口に接近したことの判定は、自車位置検出モジュール4で行われ、その演算結果が車両位置情報として施設退出案内モジュール5に送られてくる。退出前状態検知部51は、受け取った車両位置情報から、車両が出口の手前で所定距離まで接近したかどうかをチェックする(#05)。車両が出口の手前から所定距離まで接近したことが検知されるまで出口接近検知処理が繰り返される。
【0029】
車両が接近対象出口の手前で所定距離まで接近すると(#05Yes分岐)、音声報知部54が退出後案内情報を生成する(#06)。この退出後案内情報の内容は、ナビ制御モジュール3から取得される経路情報や道路情報などに基づいて決定され、この出口(接近対象出口)からの退出後の進入道路における進行方向(左折又は右折等)が含まれる。さらにここで決定された出口退出後の進行方向が、当該道路の識別情報とともに後ほどの利用のために一時的に記憶される(#07)。そして、退出後案内情報に基づく退出後案内が音声生成モジュール23を通じて音声報知される(#08)。なお、この音声報知処理がなされると、退出走行の走行時間に対応する時間カウンタや走行距離に対応する距離カウンタがリセットされ、カウントがスタートする。
【0030】
次に、この接近対象出口から退出したか、あるいは退出せずに通り過ぎた(出口非退出通過)かどうかがチェックされる(#09)。このチェックは、自車位置検出モジュール4からの車両位置情報に基づいて行われる。車両が接近対象出口から退出した場合(#09No分岐)、車両は駐車場外に退出したことになるので、この退出案内ルーチンは終了する。車両が接近対象出口を非退出通過した場合(#09Yes分岐)、車両は駐車場内でまだ退出走行していることになるが、一度退出後案内の音声報知をおこなっているので、原則的には再度の退出後案内の音声報知は中止が決定される。従って、非報知フラッグに「1」が設定される(#10)。続いて、出口の非退出通過後の退出走行で、進路が変更されたかどうか、例えば、左折または右折されたかどうかのチェック(#11)、その進路変更が最初かどうか(#11a)、その最初の進路変更の方向が、先の退出後案内情報に含まれていた退出後進入道路における進行方向と同じ方向であるかどうか(#12)のチェックが行われる。この3つのチェックの全てが肯定的に判定された場合、先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であるという条件が成立し、例外処理が有効となる。つまり、次に接近する出口に関する退出後案内の音声報知が必要であるとみなされたので、非報知フラッグに「0」が設定される(#13)。ステップ#11、#11a、#12のいずれかのチェックで否定的に判定された場合、ステップ#13がジャンプされるので、退出後案内の音声報知を中止する決定は維持される。
【0031】
続いて、経過時間制限に関する条件、すなわち、先の退出後案内情報の報知からの経過時間が所定時間以内であるという条件が成立しているかどうかのチェック(#14)と、走行距離制限に関する条件、すなわち、先の退出後案内情報の報知からの走行距離が所定距離以内であるという条件が成立しているかどうかのチェック(#15)とが行われる。ここでは、経過時間制限、及び走行距離制限の条件は、音声報知とともにスターとするカウンタに基づいて判定される。いずれかのチェックで否定的に判定された場合、先の退出後案内情報の報知との連続性がなくなったとみなされ、このルーチンを振り出しに戻すため、ステップ#03にジャンプする。ステップ#14、#15の両チェックが肯定的に判定された場合、さらに出口接近検知処理が続行される(#16)。退出前状態検知部51は、出口接近検知処理の演算結果でもある車両位置情報に基づいて、車両が次の出口(接近対象出口)の手前から所定距離まで接近したかどうかをチェックする(#17)。車両が接近対象出口に接近していない場合(#17No分岐)、ステップ#11にジャンプする。
【0032】
車両が接近対象出口の手前から所定距離まで接近すると(#17Yes分岐)、音声報知部54が退出後案内情報を生成する(#18)。退出後案内情報が生成されると、当該退出後案内情報の内容(例えば、出口退出後左方向、出口退出後右方向など)が先に報知された退出後案内情報の内容と同じかどうかチェックされる(#19a)。同じでない場合(#19aNo分岐)、この生成された退出後案内情報の報知を行う必要があるので、非報知フラグに「0」が設定される(#19b)。さらに、この退出後案内情報に含まれている、接近対象出口に接続する道路と、先の退出後案内情報の道路とが同一道路であるかどうかチェックされる(#19c)。同一道路でなければ(#19cNo分岐)、先の退出後案内情報に係る接近対象出口に接続する道路と、次の退出後案内情報に係る前記接近対象出口に接続する道路とが同じ道路であるという再報知禁止条件が成立しないので、非報知フラグに「0」が設定される(#19d)。これにより、退出後案内の音声報知が許可状態となる。同一道路であれば(#19cYes分岐)、再報知禁止条件が成立するのでステップ#19dの処理はジャンプされる。
【0033】
この段階では、車両が接近対象出口の手前で所定距離まで接近しているので、ここで非報知フラグの内容がチェックされる(#20)。非報知フラグの内容が「0」ならば(#20Yes分岐)、再報知禁止が解除されているので、退出後案内の音声報知が実施される。つまり、音声報知部54が退出後案内情報を生成し(#21)、処理対象の道路の識別情報と進入した道路での進行方向とが一時的に記憶される(#22)。次いで、退出後案内情報に基づく退出後案内が音声生成モジュール23を通じて音声報知される(#23)。非報知フラグの内容が「1」ならば(#20No分岐)、再報知禁止状態が維持されているので、ステップ#21、#22、#23退出後案内の音声報知処理が中止される。続いて、この接近対象出口から退出したか、あるいは退出せずに通り過ぎたかどうかがチェックされる(#24)。車両がこの接近対象出口からなお退出せずにこの出口を通り過ぎた場合(#09No分岐)、車両は駐車場内まだ退出走行していることになるので、ステップ#10にジャンプして、この退出案内ルーチンを続行する。車両が接近対象出口から退出した場合(#24Yes分岐)、車両は駐車場外に退出したことになるので、この退出案内ルーチンは終了する。
【0034】
〔第2実施形態〕
上述した実施形態では、基本判定処理による判定結果に関わらず退出後案内情報の報知を許可する例外処理の実行条件として、先の退出後案内情報の音声報知後に行われた車両の最初の進路変更だけが問題とされ、その最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であることを条件として規定していた。例えば、「出口退出後左方向(左折)」と案内された出口を非退出通過した後の最初の進路変更が「左折」である場合にのみ、例外処理の実行条件が成立する形態が採用されていた。本発明では、これに代えて、最初の進路変更という条件から最初という限定を取り除くことも可能である。そのような第2実施形態の退出後案内が図5と図6と図7で示される。図5と図6は図1に対応する説明図で、図6は図4に対応するフローチャートである。
【0035】
図5と図6で示された例では、図1と同様、「出口退出後左方向(左折)」と案内された出口Aを非退出通過し、「右折」「左折」「左折」「左折」の4回の進路変更の後に、出口Bに接近している状況Xと、「右折」「右折」「右折」の3回の進路変更の後に、出口Cに接近している状況Yとが示されている。ここでは、「出口退出後左方向(左折)」と案内された出口Aを通り過ぎた最初の針路変更が「右折」であり、出口Aの退出後案内情報での「左折」と異なっている。先の実施形態のように最初の進路変更だけが問題とされるなら、この時点で基本判定処理に代わって、例外処理が有効となる。従って、次の出口に接近すれば、退出後案内の音声報知が実行される。それに対してこの第2実施形態では、以後の進路変更で「左折」が生じるまでは、基本判定処理が維持される。
この第2実施形態では次の時点で以下の2つのケースが生じる。各ケースは、図5と図6でそれぞれ模式的に説明されている。
〔状況X〕図5:次の進路変更が「左折」で出口Aの退出後案内情報での「左折」と一致するので、この時点で基本判定処理に代わって、例外処理が有効となる。
〔状況Y〕図6:次の進路変更及びその次の進路変更でも「右折」であるので、なお基本判定処理が維持される。その後に接近した出口Cにおける退出後案内情報は同様に同一道路での「左折」であるから、出口Cの手前での退出後案内情報の音声報知は基本判定処理によって許可されない。この別実施形態を示す図6のフローチャートは、図4の先の実施形態を示すフローチャートに比べ、ステップ#11aが取り除かれているだけである。つまり、非報知フラグを「0」に戻す例外処理の条件として、進路変更の方向をチェックを出口を通り過ぎてからの最初の進路変更に限定していない。
【0036】
〔その他の実施形態〕
(1)上述した実施形態では、車両位置の検出が、GPS法、推測航法、風景画像認識法の組み合わせにより行われていたが、必ずしもこの3つの組み合わせでなくともよく、この3つのうちの任意の組み合わせを採用してもよい。また、本発明では車両位置検出方法を限定していないので、上述した以外の車両位置検出方法を採用してもよい。
(2)上述した実施形態では、道路に接続している出口の検知は、風景画像マッチングによって行われるとしているが、そのためには、予め出口領域の撮影画像から作成した参照画像を用意する必要がある。そのような参照画像が用意されていない場合には、撮影画像に含まれている「出口」や「EXIT」といった文字画像を文字認識して出口を検出する方法を採用することができる。さらには、出口を含む正確な施設内地図が与えられている場合には、入口を基点として、推測航法処理で走行軌跡を求めることで、出口の検出を行ってもよい。さらには、施設側から、出口及び当該出口に接続する道路の情報を通信等で受け取ることができる場合には、その情報に基づいて出口を認識する構成を採用することができる。
(3)本発明では、退出後案内情報の非報知は音声報知を対象としているので、音声以外の報知、例えば、モニタ11等を用いた視覚的な案内は常に報知してもよいし、あるいは音声報知と同様に、その非報知と報知が判定されるようにしてもよい。
(4)上述した実施形態の説明では、本発明の対象となる施設として駐車場が取り扱われたが、その他の施設、例えば、工場や学校や商業施設などにも適用できる。
【産業上の利用可能性】
【0037】
本発明の施設退出案内システムは、車両用ナビゲーション装置との協働のみならず、単体の施設退出専用の案内システムとしても適用可能である。
【符号の説明】
【0038】
12:モニタ
13:スピーカ
23:音声生成モジュール
24:車両挙動検知モジュール
4:車両位置検出モジュール
41:GPS処理部
42:推測航法処理部
43:車両位置座標算定部
45:マップマッチング部
47:撮影画像処理部
48:風景マッチング部
49:車両位置決定部
5:施設退出案内モジュール
51:退出前状態検知部
52:車両位置情報取得部
53:道路情報取得部
54:音声報知部
55:再報知判定部
56:基本判定処理部
57:例外処理部
【技術分野】
【0001】
本発明は、駐車場などの施設内において施設の出口から進入する道路での走行方向の案内を行うことができる技術に関する。
【背景技術】
【0002】
従来、例えば、特許文献1には、自車両の位置する施設の施設外の道路と施設内の道路とが接続関係にある接続地点を特定し、自車両の進行方向に対する接続地点の方向を案内するナビゲーション装置が記載されている。この装置では、自車両が施設出口案内ポイントに接近したか否か(例えば、自車両位置から施設出口案内ポイントまでの距離が所定距離以内となったか否か)を判定する。ここで、肯定判定される場合には、自車両が施設出口案内ポイントから退出する前に、所定経路へ向かう方向を案内する出口分岐案内(出口からの退出後の進行方向の案内である退出後案内)を行う。その際、施設出口案内ポイントの左方向に案内経路が存在する場合には、表示装置10による画面表示や音声によるメッセージ(例えば、「出口を左方向に進んで下さい。」)を出力して案内する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−51999号公報(段落番号0003−0025、0042−0055、図6)
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような従来の装置では、運転者は、施設内から出口を通じて施設外の道路へ退出しようとした場合、その道路に入った際にどの方向に進めばよいかを施設内の出口手前の地点で把握することができる。しかしながら、その施設から外の道路に退出する出口が複数あり、所望する出口への途中に他の出口が存在する場合等に、出口の手前に達する毎に同じような退出後案内を聞かされると、煩わしく感じるという問題が生じる。
そこで、出口手前で報知される退出後案内ができるだけ適切となるような技術が要望される。
【課題を解決するための手段】
【0005】
本発明に係る施設退出案内システムの特徴構成は、
自車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、
前記車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定されたことに基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する退出前状態検知部と、
前記接近対象出口と接続する道路の情報を含む道路情報を取得する道路情報取得部と、
前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知する音声報知部と、
先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定する再報知判定部と、を備え、
前記再報知判定部は、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の進路変更の方向が当該先の退出後案内情報により案内した進行方向(道路進入方向)と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定することである。
【0006】
この構成によれば、退出目的の特定出口への走行途中に存在する出口で退出後案内情報が音声報知されることで、運転者は退出目的の特定出口から退出した後の道路への進入方向(右折又は左折)が報知されたと認識することができ、そのままその出口を通過して目的の出口に到達したときには、先に通り過ぎた出口と同じ退出後案内情報が音声報知されないので、従来の煩わしさは解消される。一方、退出しない出口を通り過ぎたのちに行われた進路変更が退出後案内情報での道路への進入方向と同じである場合には、その進路変更によって、先ほど音声報知された進路変更が完了したと運転者が感じる可能性があるので、次の出口(退出目的の特定出口である可能性がより高くなっている)の手前でも、退出後案内情報が音声で行われる。つまり、基本的には、一度出口の手前で退出後案内情報が音声報知されると、次の出口では、その後に生成される退出後案内情報の内容が先の退出後案内情報と同じであれば、その音声報知は禁止される。但し、例外として、その途中で行われた進路変更の方向が先の退出後案内情報により案内した方向と同じであれば、その音声報知は禁止されない。これにより、駐車場などの施設に備えられた複数の出口の一つに自車両が接近した後、当該出口から退出することなく、再び他の出口又は同じ出口に接近するような場合において、出口に接近する毎に同じような退出後案内を聞かされるという煩わしさは低減する。
【0007】
この例外としての、退出目的の特定入口までの走行途中で行われた、先の退出後案内情報により案内した進行方向と同じ方向での進路変更(左折又は右折)に関しては、最初の進路変更だけを例外処理の判定対象とする制御と、全ての進路変更を例外処理の判定対象とする制御を考えることができる。最初に音声報知された退出後案内情報によって運転者が認識している進路変更が、施設内通路での同様な進路変更で完了したと感じてしまう傾向があるということを考慮すると、最初の進路変更だけを例外処理の判定対象とすることが好ましい。しかしながら、本発明では、これに限定しているわけではなく、全ての進路変更を例外処理の判定対象とする制御も含んでいる。
【0008】
上記再報知禁止条件を具体化した好適な実施形態の一つでは、前記再報知禁止条件を、前記先の退出後案内情報に係る前記接近対象出口に接続する道路と、前記再度の退出後案内情報に係る前記接近対象出口に接続する道路とが同じ道路であることとしている。これにより、退出しようとする出口に接続している道路と、先に退出後案内情報が報知された出口に接続している道路とが異なるために、運転者が再度の案内を望む可能性があるにもかかわらず、この退出しようとする出口の手前での退出後案内情報が報知されないという不都合が解消される。
【0009】
また、退出しなかった先の出口の手前で退出後案内情報が報知されたとしても、その後の施設内での退出走行の時間や走行距離が長くなると、先に報知された退出後案内情報に対する運転者の意識が薄れてくる。このため、そのような状況下では、新たな出口が接近した場合には、退出後案内情報を報知した方が、運転者に対して好都合となる。このような観点から、上記再報知禁止条件を具体化した別な好適実施形態では、前記再報知禁止条件を、前記先の退出後案内情報の報知から前記再度の退出前状態の推定までの間の経過時間が所定時間を超えていること、又は、前記先の退出後案内情報の報知から前記再度の退出前状態の推定までの間の走行距離が所定距離を超えていること、あるいはその両方であることとしている。
【0010】
さらに、本発明は、駐車場などの施設内において施設の出口から向かうべき方向の案内を行う施設退出案内方法や施設退出案内プログラムも権利対象としている。例えば、そのような施設退出案内方法は、自車両の現在位置を表す車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定するとともに、当該判定に基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定するステップと、前記接近対象出口と接続する道路の情報を含む道路情報を取得するステップと、前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知するステップと、先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定するにあたって、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定するステップと、を備えている。
また、施設退出案内プログラムは、 自車両の現在位置を表す車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定するとともに、当該判定に基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する機能と、前記接近対象出口と接続する道路の情報を含む道路情報を取得する機能と、前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知する機能と、先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定するにあたって、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定する機能とをコンピュータに実行させる。当然ながら、このような施設退出案内方法や施設退出案内プログラムも上述した施設退出案内システムで述べた作用効果を得ることができ、さらにその好適な実施形態として述べたいくつかの付加的技術を組み込むことも可能である。
【図面の簡単な説明】
【0011】
【図1】本発明による施設退出案内システム、施設退出案内プログラム、施設退出案内方法で用いられる基本的な原理を、駐車場内の車両がその駐車場から出て行く様子を例として、模式的に示している説明図である。
【図2】本発明による施設退出案内システムを採用した車両用ナビゲーション装置の機能ブロック図である。
【図3】図2に示す車両用ナビゲーション装置における施設退出案内システムの機能を示す機能ブロック図である。
【図4】施設退出案内システムにおける第1実施形態の制御の一例を示すフローチャートである。
【図5】施設退出案内システムにおける第2実施形態の制御の一例を模式的に示している説明図である。
【図6】施設退出案内システムにおける第2実施形態の制御の別例を模式的に示している説明図である。
【図7】施設退出案内システムにおける第2実施形態の制御を示すフローチャートである。
【発明を実施するための形態】
【0012】
本発明による施設退出案内システムの具体的な実施形態を説明する前に、その基本的な原理を、図1を用いて説明する。図1は、本発明による施設退出案内システムにおける基本的な情報の流れを、駐車場内の車両がその駐車場から出て行く様子を一例として取り上げ、それを模式的に示している。図1の(a)は基本判定処理が動作している状況を示しており、図1の(b)は基本判定処理から例外処理に移行する状況を示している。この図に示された駐車場の平面図では、入口は省略されており、同じ道路に接続している2つの駐車場出口が示されている。
まず、図示されていない入口から進入した車両は、適当な空き駐車スペースに駐車する。駐車目的が終わると、エンジンを起動し、退出走行を始める。退出走行が始まると、施設退出案内システムが動作する。施設退出案内システムは、駐車場施設に備えられた複数の出口の一つに車両が接近すると、これに基づいて、車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態(図ではGで示されている)であることを推定する。この推定に応答して、出口Aからの退出後の道路に対する進行方向の案内(図では「右方向」)である退出後案内情報(図ではIaで示されている)が、この出口Aの手前で音声報知される。
【0013】
しかしながら、出口Aが退出目的の出口でなければ、車両は出口Aをから退出せずにこの出口Aを通り過ぎる(出口非退出通過)。この場合、車両はまだ施設内を走行していることになるので、施設退出案内システムは車両の次の出口への接近を監視する。同時に、次の出口での再度の退出後案内情報の内容が先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には退出後案内情報の報知を禁じる基本判定処理が動作するが、この基本判定処理は、状況によっては、退出後案内情報の報知を行う例外処理に移行する。つまり、
(1)図1(a)参照
出口非退出通過後の走行において、次の出口Bに車両が接近した際に再度の退出後案内情報の内容が先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には基本判定処理が動作するので、出口Bからの退出後の道路に対する進行方向の案内である退出後案内情報が音声報知されない。
(2)図1(b)参照
出口非退出通過後の走行において、駐車場走行路に沿った進路変更が行われると、その進路変更方向(左折又は右折)が例外処理の判定対象となる。この例外処理への移行判定では、チェックされた進路変更方向と先に報知された退出後案内情報に含まれている道路への進入方向(図では右折)が一致するかどうか比較される。この比較で、両方の方向が一致した場合、基本判定処理に代わって、次の出口での退出後案内情報の報知を行う例外処理が動作する。次の出口Bに車両が接近した際に例外処理が動作しているので、退出後案内情報(図ではIbで示されている)が音声報知される。
このように、(1)の場合では、同じ内容の退出後案内情報が複数回音声報知されることがないので、出口に接近する毎に同じ退出後案内情報が繰り返されるという煩わしさは解消される。また、退出後案内情報により案内した進行方向と同じ方向への進路変更を途中走行において行った場合は、再度の退出後案内情報の音声報知が有意義となるので、次の出口手前でも退出後案内情報が音声報知される。
【0014】
つまり、基本判定処理では、再度の退出後案内情報の内容が先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合にはその退出後案内情報は「非報知」と判定される。先の退出後案内情報の報知後に行われた車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合に実行される例外処理では、基本判定処理による判定結果に関わらず「報知」と判定される。いずれにしても、最終的に、退出目的の出口(図では出口B)から車両が駐車場を出て、道路に入ると、この施設退出案内システムの動作は終了する。
【0015】
なお、上記記載での再報知禁止条件の好適例として、先の退出後案内情報と後の退出後案内情報とが対象とする出口退出後の道路が同一であること、先の出口を非退出通過した後の(出口通過後の)走行時間が所定値を下回っていること、先の出口を非退出通過した後の走行距離が所定値を下回っていることなどが挙げられる。従って、退出後案内の対象となる道路が先の退出後案内の対象とする道路と異なっている場合は、基本判定処理が適用されず、退出後案内情報が報知される。また、先の出口を非退出通過した後の走行時間や走行距離が所定値を越えた場合は、基本判定処理の適用がなくなり、この制御ルーチンは最初に戻って繰り返される。なお、再報知禁止条件とは別に、再度の退出後案内情報の内容が先の退出後案内情報の内容と異なる場合にも、基本判定処理が適用されず、再度の退出後案内情報が報知される。
【0016】
〔第1実施形態〕
上述した基本原理に基づいて動作する施設退出案内システムを採用した車両用ナビゲーション装置の一例を示す機能ブロック図が図2に示されている。この車両用ナビゲーション装置は、GPSを用いた位置測定機能と推測航法による位置測定機能とによって算定された自車両位置(以下単に車両位置と称する)を、風景画像認識に基づいて修正する機能を備えている。このため、風景画像認識のために予め作成された参照画像がデータベース化されて参照画像DB92に格納されている。図2には、そのような車両用ナビゲーション装置を車載LANに組み込んだ形態で示した機能ブロック図が示されている。この車両用ナビゲーション装置は、操作入力モジュール21、ナビ制御モジュール3、車両位置検出モジュール4、施設退出案内モジュール5、上記の参照画像DB92と道路地図データを収納した道路地図データベース91(以下単に道路地図DBと略称する)とを有するデータベース9を備えている。
【0017】
ナビ制御モジュール3は、経路設定部31、経路探索部32、経路案内部33を備えている。経路設定部31は、例えば車両位置等の出発地、入力された目的地、通過地点や走行条件(高速道路の使用有無など)を設定する。経路探索部32は、経路設定部31によって設定された条件に基づき出発地から目的地までの案内経路を探索するための演算処理を行う処理部である。経路案内部33は、経路探索部32により探索された出発地から目的地までの経路に従って、モニタ12の表示画面による案内表示やスピーカ13による音声案内等により、運転者に対して適切な経路案内を行うための演算処理を行う処理部である。
【0018】
車両位置検出モジュール4は、従来のGPSによる位置算定及び推測航法による位置算定によって得られた推定車両位置を、この推定車両位置を利用した風景画像認識によって決定された車両位置で修正する機能を有する。車両位置検出モジュール4は、GPS処理部41、推測航法処理部42、車両位置算定部43、マップマッチング部45、撮影画像処理部47、風景マッチング部48、車両位置決定部49を備えている。GPS処理部41にはGPS衛星からのGPS信号を受信するGPS測定ユニット15が接続されている。GPS処理部41はGPS測定ユニット15で受信されたGPS衛星からの信号を解析し、車両の現在位置(緯度及び経度)を算定し、GPS位置データとして車両位置算定部43に送る。推測航法処理部42には距離センサ16と方位センサ17が接続されている。距離センサ16は、車両の車速や移動距離を検出するセンサである。距離センサ16は、その検出結果としての車速及び移動距離の情報を推測航法処理部42へ出力する。方位センサ17は車両の進行方位の情報を推測航法処理部42へ出力する。推測航法処理部42は、刻々と送られてくる移動距離情報と方位情報とに基づいて推測航法位置を演算し、推測航法位置データとして車両位置算定部43に送る。車両位置算定部43は、GPS位置データと推測航法位置データとから公知の方法により車両の位置を特定する演算を行う。算定された車両位置情報は、測定誤差等を含んだ情報となっており、場合によっては道路上から外れてしまうので、マップマッチング部45により、車両位置を道路地図に示される道路上とする補正が行われる。そのような補正後の車両位置情報は推定車両位置情報として車両位置決定部49に送られる。
【0019】
撮影画像処理部47は、車載カメラ14によって撮影された車両からの前方風景撮影画像から画像認識(ここでは画像マッチング)に適した認識用撮影画像を生成する。風景マッチング部48は、参照画像DB92から抽出した参照画像と撮影画像処理部47から出力された認識用撮影画像とのマッチングを行う。パターンマッチングが成功した場合には、マッチングパターンである参照画像に関係付けられた撮影位置が読み出される。この撮影位置が車両位置として決定され、車両位置決定部49に転送される。車両位置決定部49は転送されてきた車両位置を推定車両位置と置き換える車両位置修正を行う。参照画像には、例えば、駐車場の入口付近や出口付近の画像なども含まれており、それらの参照画像と認識用撮影画像とのマッチングに基づいて、自車両が駐車場の入口や出口に接近したことが判定される。すなわち、車両位置決定部49は、自車両が駐車場の入口や出口に接近したと判定した場合には、その旨を示す情報を車両位置情報に含めて出力する。
【0020】
この車両用ナビゲーション装置は、また、周辺装置として、タッチパネル11やスイッチなどの入力デバイスを通じての操作入力を適切な操作信号に変換して内部に転送する操作入力モジュール21、モニタ12に各種案内処理に必要な画像情報を表示するための表示モジュール22、スピーカ13やブザーから各種案内処理に必要な音声情報を流す音声生成モジュール23、ステアリング操作量や制動や加速などといった車両の種々の挙動の検出データを車両挙動情報に変換して内部に転送する車両挙動検知モジュール24を備えている。
【0021】
施設退出案内モジュール5は、駐車場などの施設内において施設の出口からの退出後の道路での進行方向の案内を行うために、図3に示すように、退出前状態検知部51と、車両位置情報取得部52と、道路情報取得部53と、音声報知部54と、再報知判定部55とを備えている。
【0022】
車両位置情報取得部52は、車両位置検出モジュール4から送られてきた、車両の現在位置を表す車両位置情報を取得して、退出前状態検知部51に与える。この車両位置情報には、駐車場などの施設の入口や出口に接近したことを示す情報も含まれており、この車両位置情報から自車両が駐車場の出口に接近したことを把握することができる。道路情報取得部53は、駐車場などの施設の入口や出口と接続している道路に関する道路情報を、車両位置情報に基づいて道路地図データベース91から取得する。退出前状態検知部51は、車両位置情報から、駐車場などの施設に備えられた複数の出口の一つに自車両が接近したと判定されたことに基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する。例えば、駐車場で駐車した後の走行開始によって駐車場からの退出走行であることを推定した場合、その退出走行において駐車場出口の手前所定距離に達すると、車両が退出前状態であることを音声報知部54等に知らせる。音声報知部54は、退出前状態検知部51による退出前状態の推定に応答して、道路情報に基づく接近対象出口からの退出後の進入道路における進行方向の案内である退出後案内情報を当該接近対象出口からの退出前に音声報知する。ここで、退出後案内情報による案内としては、例えば、「出口退出後右方向」「出口退出後左方向」「出口退出後直進」などがある。音声報知部54は、例えば、「駐車場退出後、右方向です。」のような音声案内を報知する。この音声報知部54における退出案内情報の生成及び音声生成モジュール23への送出の処理は、再報知判定部55の管理下で行われる。
【0023】
再報知判定部55は、経時的に先に行われた先の退出後案内情報の報知後に、退出前状態検知部51により退出前状態が推定されなくなった後に再び退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定する。ここで、退出前状態が推定されなくなったということは、車両が接近対象出口から退出したこと、あるいは車両が退出せずにその接近対象出口を通り過ぎたこと(出口非退出通過)を意味する。そしてその後、再び退出前状態が推定されたということは、車両が接近対象出口を非退出通過した後、次の出口の手前に到達したことを意味する。再報知判定部55は、再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、その例外処理として、先の退出後案内情報の報知後に行われた自車両の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、基本判定処理による判定結果に関わらず報知と判定する。このため、再報知判定部55には、基本判定処理を行う基本判定処理部56と、例外処理を行う例外処理部57が含まれている。基本判定処理部56は、施設からの退出走行において1つの出口を非退出通過した後、再び出口に接近した場合に、再度通知されようとする退出後案内情報の内容が先の退出後案内情報の内容と同じであれば、例えば、両方ともに「出口退出後左方向」という案内内容である場合、退出後案内情報の音声報知は中止する。例外処理部57は上述した基本判定処理部56による退出後案内情報の基本判定処理、すなわち音声報知中止の決定を無効化する機能を有している。例外処理部57は、退出後案内情報が音声報知された後の次の出口までの退出走行において、先に音声報知された退出後案内情報に含まれている出口退出後の道路進入時の進行方向(左折又は右折等)と同じ方向の進路変更が行われた際には、基本判定処理による退出後案内情報の音声報知中止の決定を取り消して、次に出口に接近した場合には退出後案内情報の音声報知を音声報知部54に指令する。
【0024】
再報知判定部55が取り扱っている、再報知禁止条件は、基本判定処理による退出後案内情報の音声報知中止の条件である。そのような再報知禁止条件の一つは、先の退出後案内情報に係る前記接近対象出口に接続する道路と、前記再度の退出後案内情報に係る前記接近対象出口に接続する道路とが同じ道路であるという条件である。先の退出後案内の情報において案内した道路と同じ道路に接続する出口に対しては、それら出口同士が道路と並行して設けられていることになるので、その出口から退出した後の進行方向の案内であるその退出後案内情報を行わなくても、退出後の道路進入時の進行方向を運転者が容易に理解できる可能性が高くなるからである。そのため、ここでは、退出後案内情報の再報知禁止を行う条件として、処理対象出口に接続する道路が同一であるという条件が設定されている。
【0025】
さらにこの実施形態では、再報知禁止条件として、先の退出後案内情報の報知から再度の退出前状態の推定までの間の経過時間が所定時間を超えているという経過時間制限に関する条件、及び先の退出後案内情報の報知から再度の退出前状態の推定までの間の走行距離が所定距離を超えているという走行距離制限に関する条件が設定されている。もちろん、経過時間制限に関する条件又は走行距離制限に関する条件のいずれか一方の条件だけを設定してもよい。退出後案内情報に基づく案内を聞いた後、長い時間、又は長い距離を走行することによって先の案内報知を忘れてしまうので、再度の報知をしても差し支えないし、また、再度の報知が必要となる可能性も高くなるからである。逆に言えば、このような経過時間制限に関する条件又は走行距離制限に関する条件が設定されていることにより、短い時間に複数回同じ案内がされる煩わしさが回避されるという利点がある。
【0026】
上述したように構成されたカーナビゲーションシステムにおける駐車場での施設退出案内制御の一例を図4のフローチャートを用いて説明する。この施設退出案内制御は実質的には施設退出案内モジュール5によって行われる。
まず、車両が駐車状態から発進すると(#01)、自車位置検出モジュール4で取得された車両位置情報や道路情報や、必要に応じて車両挙動情報などを用いて、車両が駐車場内において出口に向かう退出走行であるかどうかがチェックされる(#02)。ここで、退出走行でないと判断されると(#02No分岐)、この退出案内ルーチンは終了する。
【0027】
ステップ#02で退出走行であると判断されると、初期設定として、道路情報案内の非報知または報知を表す非報知フラグに「0」を設定する(#03)。なお、非報知フラグの「0」は報知を意味し、「1」は非報知を意味する。
【0028】
初期設定が終わると、退出前状態検知部51が、車両が出口から所定距離の地点に到達したかどうかを検知する出口接近検知処理を実行する(#04)。この出口接近検知処理における重要な演算である自車両が出口に接近したことの判定は、自車位置検出モジュール4で行われ、その演算結果が車両位置情報として施設退出案内モジュール5に送られてくる。退出前状態検知部51は、受け取った車両位置情報から、車両が出口の手前で所定距離まで接近したかどうかをチェックする(#05)。車両が出口の手前から所定距離まで接近したことが検知されるまで出口接近検知処理が繰り返される。
【0029】
車両が接近対象出口の手前で所定距離まで接近すると(#05Yes分岐)、音声報知部54が退出後案内情報を生成する(#06)。この退出後案内情報の内容は、ナビ制御モジュール3から取得される経路情報や道路情報などに基づいて決定され、この出口(接近対象出口)からの退出後の進入道路における進行方向(左折又は右折等)が含まれる。さらにここで決定された出口退出後の進行方向が、当該道路の識別情報とともに後ほどの利用のために一時的に記憶される(#07)。そして、退出後案内情報に基づく退出後案内が音声生成モジュール23を通じて音声報知される(#08)。なお、この音声報知処理がなされると、退出走行の走行時間に対応する時間カウンタや走行距離に対応する距離カウンタがリセットされ、カウントがスタートする。
【0030】
次に、この接近対象出口から退出したか、あるいは退出せずに通り過ぎた(出口非退出通過)かどうかがチェックされる(#09)。このチェックは、自車位置検出モジュール4からの車両位置情報に基づいて行われる。車両が接近対象出口から退出した場合(#09No分岐)、車両は駐車場外に退出したことになるので、この退出案内ルーチンは終了する。車両が接近対象出口を非退出通過した場合(#09Yes分岐)、車両は駐車場内でまだ退出走行していることになるが、一度退出後案内の音声報知をおこなっているので、原則的には再度の退出後案内の音声報知は中止が決定される。従って、非報知フラッグに「1」が設定される(#10)。続いて、出口の非退出通過後の退出走行で、進路が変更されたかどうか、例えば、左折または右折されたかどうかのチェック(#11)、その進路変更が最初かどうか(#11a)、その最初の進路変更の方向が、先の退出後案内情報に含まれていた退出後進入道路における進行方向と同じ方向であるかどうか(#12)のチェックが行われる。この3つのチェックの全てが肯定的に判定された場合、先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であるという条件が成立し、例外処理が有効となる。つまり、次に接近する出口に関する退出後案内の音声報知が必要であるとみなされたので、非報知フラッグに「0」が設定される(#13)。ステップ#11、#11a、#12のいずれかのチェックで否定的に判定された場合、ステップ#13がジャンプされるので、退出後案内の音声報知を中止する決定は維持される。
【0031】
続いて、経過時間制限に関する条件、すなわち、先の退出後案内情報の報知からの経過時間が所定時間以内であるという条件が成立しているかどうかのチェック(#14)と、走行距離制限に関する条件、すなわち、先の退出後案内情報の報知からの走行距離が所定距離以内であるという条件が成立しているかどうかのチェック(#15)とが行われる。ここでは、経過時間制限、及び走行距離制限の条件は、音声報知とともにスターとするカウンタに基づいて判定される。いずれかのチェックで否定的に判定された場合、先の退出後案内情報の報知との連続性がなくなったとみなされ、このルーチンを振り出しに戻すため、ステップ#03にジャンプする。ステップ#14、#15の両チェックが肯定的に判定された場合、さらに出口接近検知処理が続行される(#16)。退出前状態検知部51は、出口接近検知処理の演算結果でもある車両位置情報に基づいて、車両が次の出口(接近対象出口)の手前から所定距離まで接近したかどうかをチェックする(#17)。車両が接近対象出口に接近していない場合(#17No分岐)、ステップ#11にジャンプする。
【0032】
車両が接近対象出口の手前から所定距離まで接近すると(#17Yes分岐)、音声報知部54が退出後案内情報を生成する(#18)。退出後案内情報が生成されると、当該退出後案内情報の内容(例えば、出口退出後左方向、出口退出後右方向など)が先に報知された退出後案内情報の内容と同じかどうかチェックされる(#19a)。同じでない場合(#19aNo分岐)、この生成された退出後案内情報の報知を行う必要があるので、非報知フラグに「0」が設定される(#19b)。さらに、この退出後案内情報に含まれている、接近対象出口に接続する道路と、先の退出後案内情報の道路とが同一道路であるかどうかチェックされる(#19c)。同一道路でなければ(#19cNo分岐)、先の退出後案内情報に係る接近対象出口に接続する道路と、次の退出後案内情報に係る前記接近対象出口に接続する道路とが同じ道路であるという再報知禁止条件が成立しないので、非報知フラグに「0」が設定される(#19d)。これにより、退出後案内の音声報知が許可状態となる。同一道路であれば(#19cYes分岐)、再報知禁止条件が成立するのでステップ#19dの処理はジャンプされる。
【0033】
この段階では、車両が接近対象出口の手前で所定距離まで接近しているので、ここで非報知フラグの内容がチェックされる(#20)。非報知フラグの内容が「0」ならば(#20Yes分岐)、再報知禁止が解除されているので、退出後案内の音声報知が実施される。つまり、音声報知部54が退出後案内情報を生成し(#21)、処理対象の道路の識別情報と進入した道路での進行方向とが一時的に記憶される(#22)。次いで、退出後案内情報に基づく退出後案内が音声生成モジュール23を通じて音声報知される(#23)。非報知フラグの内容が「1」ならば(#20No分岐)、再報知禁止状態が維持されているので、ステップ#21、#22、#23退出後案内の音声報知処理が中止される。続いて、この接近対象出口から退出したか、あるいは退出せずに通り過ぎたかどうかがチェックされる(#24)。車両がこの接近対象出口からなお退出せずにこの出口を通り過ぎた場合(#09No分岐)、車両は駐車場内まだ退出走行していることになるので、ステップ#10にジャンプして、この退出案内ルーチンを続行する。車両が接近対象出口から退出した場合(#24Yes分岐)、車両は駐車場外に退出したことになるので、この退出案内ルーチンは終了する。
【0034】
〔第2実施形態〕
上述した実施形態では、基本判定処理による判定結果に関わらず退出後案内情報の報知を許可する例外処理の実行条件として、先の退出後案内情報の音声報知後に行われた車両の最初の進路変更だけが問題とされ、その最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であることを条件として規定していた。例えば、「出口退出後左方向(左折)」と案内された出口を非退出通過した後の最初の進路変更が「左折」である場合にのみ、例外処理の実行条件が成立する形態が採用されていた。本発明では、これに代えて、最初の進路変更という条件から最初という限定を取り除くことも可能である。そのような第2実施形態の退出後案内が図5と図6と図7で示される。図5と図6は図1に対応する説明図で、図6は図4に対応するフローチャートである。
【0035】
図5と図6で示された例では、図1と同様、「出口退出後左方向(左折)」と案内された出口Aを非退出通過し、「右折」「左折」「左折」「左折」の4回の進路変更の後に、出口Bに接近している状況Xと、「右折」「右折」「右折」の3回の進路変更の後に、出口Cに接近している状況Yとが示されている。ここでは、「出口退出後左方向(左折)」と案内された出口Aを通り過ぎた最初の針路変更が「右折」であり、出口Aの退出後案内情報での「左折」と異なっている。先の実施形態のように最初の進路変更だけが問題とされるなら、この時点で基本判定処理に代わって、例外処理が有効となる。従って、次の出口に接近すれば、退出後案内の音声報知が実行される。それに対してこの第2実施形態では、以後の進路変更で「左折」が生じるまでは、基本判定処理が維持される。
この第2実施形態では次の時点で以下の2つのケースが生じる。各ケースは、図5と図6でそれぞれ模式的に説明されている。
〔状況X〕図5:次の進路変更が「左折」で出口Aの退出後案内情報での「左折」と一致するので、この時点で基本判定処理に代わって、例外処理が有効となる。
〔状況Y〕図6:次の進路変更及びその次の進路変更でも「右折」であるので、なお基本判定処理が維持される。その後に接近した出口Cにおける退出後案内情報は同様に同一道路での「左折」であるから、出口Cの手前での退出後案内情報の音声報知は基本判定処理によって許可されない。この別実施形態を示す図6のフローチャートは、図4の先の実施形態を示すフローチャートに比べ、ステップ#11aが取り除かれているだけである。つまり、非報知フラグを「0」に戻す例外処理の条件として、進路変更の方向をチェックを出口を通り過ぎてからの最初の進路変更に限定していない。
【0036】
〔その他の実施形態〕
(1)上述した実施形態では、車両位置の検出が、GPS法、推測航法、風景画像認識法の組み合わせにより行われていたが、必ずしもこの3つの組み合わせでなくともよく、この3つのうちの任意の組み合わせを採用してもよい。また、本発明では車両位置検出方法を限定していないので、上述した以外の車両位置検出方法を採用してもよい。
(2)上述した実施形態では、道路に接続している出口の検知は、風景画像マッチングによって行われるとしているが、そのためには、予め出口領域の撮影画像から作成した参照画像を用意する必要がある。そのような参照画像が用意されていない場合には、撮影画像に含まれている「出口」や「EXIT」といった文字画像を文字認識して出口を検出する方法を採用することができる。さらには、出口を含む正確な施設内地図が与えられている場合には、入口を基点として、推測航法処理で走行軌跡を求めることで、出口の検出を行ってもよい。さらには、施設側から、出口及び当該出口に接続する道路の情報を通信等で受け取ることができる場合には、その情報に基づいて出口を認識する構成を採用することができる。
(3)本発明では、退出後案内情報の非報知は音声報知を対象としているので、音声以外の報知、例えば、モニタ11等を用いた視覚的な案内は常に報知してもよいし、あるいは音声報知と同様に、その非報知と報知が判定されるようにしてもよい。
(4)上述した実施形態の説明では、本発明の対象となる施設として駐車場が取り扱われたが、その他の施設、例えば、工場や学校や商業施設などにも適用できる。
【産業上の利用可能性】
【0037】
本発明の施設退出案内システムは、車両用ナビゲーション装置との協働のみならず、単体の施設退出専用の案内システムとしても適用可能である。
【符号の説明】
【0038】
12:モニタ
13:スピーカ
23:音声生成モジュール
24:車両挙動検知モジュール
4:車両位置検出モジュール
41:GPS処理部
42:推測航法処理部
43:車両位置座標算定部
45:マップマッチング部
47:撮影画像処理部
48:風景マッチング部
49:車両位置決定部
5:施設退出案内モジュール
51:退出前状態検知部
52:車両位置情報取得部
53:道路情報取得部
54:音声報知部
55:再報知判定部
56:基本判定処理部
57:例外処理部
【特許請求の範囲】
【請求項1】
自車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、
前記車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定されたことに基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する退出前状態検知部と、
前記接近対象出口と接続する道路の情報を含む道路情報を取得する道路情報取得部と、
前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知する音声報知部と、
先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定する再報知判定部と、を備え、
前記再報知判定部は、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定する施設退出案内システム。
【請求項2】
前記再報知禁止条件は、前記先の退出後案内情報に係る前記接近対象出口に接続する道路と、前記再度の退出後案内情報に係る前記接近対象出口に接続する道路とが同じ道路であることを含む請求項1に記載の施設退出案内システム。
【請求項3】
前記再報知禁止条件は、前記先の退出後案内情報の報知から前記再度の退出前状態の推定までの間の経過時間が所定時間を超えていること、及び前記先の退出後案内情報の報知から前記再度の退出前状態の推定までの間の走行距離が所定距離を超えていること、の少なくとも一方を含む請求項1又は2に記載の施設退出案内システム。
【請求項4】
自車両の現在位置を表す車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定するとともに、当該判定に基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定するステップと、
前記接近対象出口と接続する道路の情報を含む道路情報を取得するステップと、
前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知するステップと、
先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定するにあたって、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定するステップと、
を備える施設退出案内方法。
【請求項5】
自車両の現在位置を表す車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定するとともに、当該判定に基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する機能と、
前記接近対象出口と接続する道路の情報を含む道路情報を取得する機能と、
前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知する機能と、
先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定するにあたって、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定する機能と、
をコンピュータに実行させるための施設退出案内プログラム。
【請求項1】
自車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、
前記車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定されたことに基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する退出前状態検知部と、
前記接近対象出口と接続する道路の情報を含む道路情報を取得する道路情報取得部と、
前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知する音声報知部と、
先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定する再報知判定部と、を備え、
前記再報知判定部は、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定する施設退出案内システム。
【請求項2】
前記再報知禁止条件は、前記先の退出後案内情報に係る前記接近対象出口に接続する道路と、前記再度の退出後案内情報に係る前記接近対象出口に接続する道路とが同じ道路であることを含む請求項1に記載の施設退出案内システム。
【請求項3】
前記再報知禁止条件は、前記先の退出後案内情報の報知から前記再度の退出前状態の推定までの間の経過時間が所定時間を超えていること、及び前記先の退出後案内情報の報知から前記再度の退出前状態の推定までの間の走行距離が所定距離を超えていること、の少なくとも一方を含む請求項1又は2に記載の施設退出案内システム。
【請求項4】
自車両の現在位置を表す車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定するとともに、当該判定に基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定するステップと、
前記接近対象出口と接続する道路の情報を含む道路情報を取得するステップと、
前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知するステップと、
先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定するにあたって、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定するステップと、
を備える施設退出案内方法。
【請求項5】
自車両の現在位置を表す車両位置情報から、施設に備えられた複数の出口の一つに自車両が接近したと判定するとともに、当該判定に基づいて、自車両が当該接近中の出口である接近対象出口から退出しようとしている退出前状態であることを推定する機能と、
前記接近対象出口と接続する道路の情報を含む道路情報を取得する機能と、
前記退出前状態検知部により退出前状態と推定された場合、前記道路情報に基づく前記接近対象出口からの退出後の進行方向の案内である退出後案内情報を前記接近対象出口からの退出前に音声報知する機能と、
先の前記退出後案内情報の報知後に、前記退出前状態検知部により前記退出前状態が推定されなくなった後に再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定するにあたって、前記再度の退出後案内情報の内容が前記先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知と判定することを基本判定処理とし、前記先の退出後案内情報の報知後に行われた自車両の最初の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には、前記基本判定処理による判定結果に関わらず報知と判定する機能と、
をコンピュータに実行させるための施設退出案内プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−118025(P2012−118025A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−270717(P2010−270717)
【出願日】平成22年12月3日(2010.12.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年12月3日(2010.12.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]