
旋回クレーンの振れ止め制御方法及び制御装置
【課題】旋回角度θに起因する特異点を持たずに、旋回クレーンの連続的な振れ止め制御を可能にした旋回クレーンの振れ止め制御方法及び制御装置を提供する。
【解決手段】吊り荷運搬用のブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を演算する制御方法において、前記制御入力を、ブームの目標旋回角速度と、ブームの目標旋回角度と、ブームの水平旋回半径と、旋回クレーンからフィードバックされたブームの実際の旋回角度,吊り荷の水平面内のx方向位置及びy方向位置,吊り荷のx方向速度及びy方向速度と、フィードバックゲイン及び定数とを用いて、改良バックステッピング法により演算する。
【解決手段】吊り荷運搬用のブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を演算する制御方法において、前記制御入力を、ブームの目標旋回角速度と、ブームの目標旋回角度と、ブームの水平旋回半径と、旋回クレーンからフィードバックされたブームの実際の旋回角度,吊り荷の水平面内のx方向位置及びy方向位置,吊り荷のx方向速度及びy方向速度と、フィードバックゲイン及び定数とを用いて、改良バックステッピング法により演算する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、旋回クレーンの吊り荷の振れを防止するための振れ止め制御方法、及び、この方法を実施するための制御装置に関するものである。
【背景技術】
【0002】
特許文献1には、旋回可能なブームに吊り下げられた吊り荷を運搬する旋回クレーンにおいて、ブームの旋回や外乱による吊り荷の振れを有効に防止するようにしたクレーンの制御方法及び制御装置が記載されている。
この従来技術に係る制御装置では、吊り荷を旋回移送する際の目標旋回角度のx,y方向成分と、フィードバックした吊り荷の位置及び速度のx,y方向成分とに基づき、吊り荷の振動が減衰振動になるように線形制御理論によって実際の旋回角度を演算し、この旋回角度をクレーンに入力して運転するものである。
【0003】
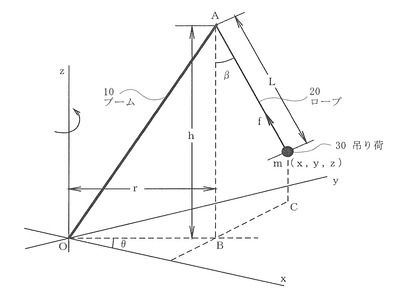
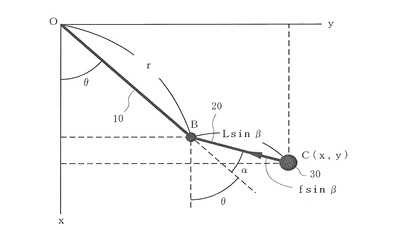
図6,図7は、特許文献1に記載されているものと同様に、ブーム及びロープを剛体とし、吊り荷を質量mの質点とすると共に、ロープ下端のフック及びロープの重量を無視して構成した旋回クレーンモデルを示しており、図7は図6をz軸方向から見た平面図である。
これらの図において、10はブーム、20はロープ(ワイヤ)、30は吊り荷であり、Oはブーム10の支点、Aはロープ20の支点、Bは支点Aのx,y平面への投影点、Cは吊り荷30のx,y平面への投影点、(x,y,z)は質点mの座標(位置)、Lはロープ20の長さ、hは支点Aのx,y平面からの高さ、rはブーム10すなわち支点Aの水平旋回半径、θはx軸と線分OBとのなす角度(旋回角度)、αは線分OBの延長線とロープ20とのなす角度、βはロープ20と線分ABとのなす振れ角度、fはロープ20の張力である。
【0004】
図6、図7より、質点mの座標(x,y,z)は数式1によって表される。
【0005】
【数1】

【0006】
また、質点m(その質量もmとする)が時間と共に移動する場合、質点mのx(t),y(t),z(t)方向の運動方程式は、数式2によって表される。
【0007】
【数2】
【0008】
振れ角度βは微小なためcosβを1と近似し、支点Aの高さh、ロープ20の長さL、旋回半径rを一定とすると、数式1,2から、ブーム10の旋回に関する数式3の運動方程式を得る。
【0009】
【数3】
【0010】
また、ブーム10の旋回角速度に関する運動方程式として、数式4を得る。なお、数式4において、uは制御入力である。
【0011】
【数4】
【0012】
いま、ブーム10(吊り荷30)の目標旋回角度θrと実際の旋回角度θとの関係を示す制御則を、数式5とおく。なお、数式5において、F1x,F1y,F2x,F2yはx,y方向の移動量及び速度に関するフィードバックゲインである。
【0013】
【数5】
【0014】
ここで、クレーンの数式モデルを数式6により表す。数式6において、gは重力加速度である。
【0015】
【数6】
【0016】
次に、ゲインF1x,F1y,F2x,F2yを求めるために、数式5におけるθを数式6に代入し、数式7を得る。
【0017】
【数7】
【0018】
特許文献1に係る従来技術では、数式7におけるx,y方向の移動量、速度及び加速度が何れも減衰振動になるように、線形制御理論を用いてゲインF1x,F1y,F2x,F2yを決定し、目標旋回角度θrのx方向成分、y方向成分であるcosθr,sinθrに沿って質点mの座標(x,y)が移動するように制御を行う。
すなわち、制御装置に目標旋回角度θrが入力されてそのx方向成分cosθr及びy方向成分sinθrが算出されると共に、これらの値とクレーンからフィードバックされたx,y方向の移動量及び速度、並びにゲインF1x,F1y,F2x,F2yを用いて、数式5から得た下記の数式8によりブームの旋回角度θが演算される。
【0019】
【数8】
【0020】
上記従来技術では、数式8により演算した旋回角度θをクレーンに入力して運転することにより、吊り荷30の振れを最小限に抑えながらブームを旋回させ、吊り荷30が目標旋回角度θrに達したときの残存振れの発生を抑えて振れ止め制御を行うことを可能にしている。
【先行技術文献】
【特許文献】
【0021】
【特許文献1】特開2001−106474号公報(段落[0021]〜[0032]、図1〜図4等)
【発明の概要】
【発明が解決しようとする課題】
【0022】
しかしながら、上記従来技術では、数式8における分母が0になる時(すなわち、数式5からcosθ=0になる時)にtanθ=∞となって制御装置が特異点を持つため、制御不能になるという問題があった。
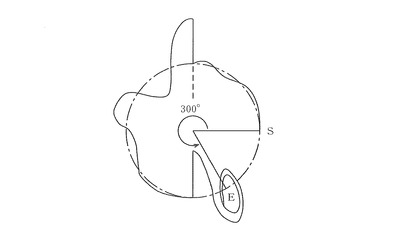
ここで、図8は、目標旋回角度θrを300[°]とした場合の従来技術による吊り荷の軌跡を示す概念図であり、一点鎖線は目標軌道、実線は吊り荷の実際の軌跡、Sはスタート地点、Eは目標地点をそれぞれ示している。この図8から明らかなように、cosθ=0となる旋回角度90[°]及び270[°]の位置が特異点となり、振れ止め制御が不能になって吊り荷が大きく振れることとなる。
このような問題を解決するため、従来技術では、数式8の分母が0にならないようにプログラム上の対応策を講じなくてはならず、これがコスト上昇の原因となっていた。
【0023】
そこで、本発明の解決課題は、ブームの旋回角度に起因する特異点を持たずに、旋回クレーンの連続的かつ安定した振れ止め制御を可能にした旋回クレーンの振れ止め制御方法及び制御装置を提供することにある。
【課題を解決するための手段】
【0024】
上記課題を解決するため、請求項1に係る振れ止め制御方法は、旋回クレーンのブームから吊り下げられた吊り荷を前記ブームの水平面内の旋回により目標位置へ運搬するための旋回クレーンの制御方法であって、前記ブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を演算する制御方法において、
前記制御入力を、前記ブームの目標旋回角速度と、前記ブームの目標旋回角度と、前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のx方向位置及びy方向位置,前記吊り荷のx方向速度及びy方向速度と、フィードバックゲイン及び定数とを用いて、改良バックステッピング法により演算するものである。
【0025】
請求項2に記載するように、前記制御入力は、例えば後述する数式19によって演算することができる。
【0026】
また、請求項3に係る振れ止め制御装置は、旋回クレーンのブームから吊り下げられた吊り荷を前記ブームの水平面内の旋回により目標位置へ運搬するための旋回クレーンの制御装置であって、前記ブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を改良バックステッピング法により演算する制御装置において、
前記ブームの目標旋回角速度と、前記ブームの目標旋回角度と、前記ブームの実際の旋回角度と、定数とを用いて、第1加算成分を演算する第1演算手段と、
前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のx方向位置及びx方向速度と、フィードバックゲイン及び定数とを用いて、第2加算成分を演算する第2演算手段と、
前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のy方向位置及びy方向速度と、フィードバックゲイン及び定数とを用いて、第3加算成分を演算する第3演算手段と、
前記第1加算成分、第2加算成分及び第3加算成分を加算して前記制御入力を演算する加算手段と、を備えたものである。
【発明の効果】
【0027】
本発明によれば、特許文献1に記載されているようにtan−1の演算によってクレーンに入力する旋回角度を求める演算によらず、改良バックステッピング法により求めた制御入力をクレーンに与えることにより、ブームの旋回角度に起因する特異点もなく、連続的かつ安定した旋回クレーンの振れ止め制御を行うことができる。
【図面の簡単な説明】
【0028】
【図1】本発明の実施形態に係る制御装置及び旋回クレーンのブロック図である。
【図2】シミュレーションによる吊り荷の軌跡を示す図である。
【図3】シミュレーションによる吊り荷の軌跡を示す図である。
【図4】シミュレーションによる吊り荷のx,y方向の位置の時間応答を示す図である。
【図5】シミュレーションによる吊り荷のx,y方向の位置の時間応答を示す図である。
【図6】旋回クレーンモデルの説明図である。
【図7】図6をz軸方向から見た平面図である。
【図8】従来技術による吊り荷の軌跡を示す概念図である。
【発明を実施するための形態】
【0029】
以下、図に沿って本発明の実施形態を説明する。なお、この実施形態が適用される旋回クレーンのモデルは、図6,図7に記載したものと同一である。
まず、この実施形態では、改良バックステッピング法を用いて旋回クレーンに対する制御入力uを求めるように制御装置を設計する。
ここで、いわゆるバックステッピング法は、以下に示す改良バックステッピング法において、位置に関する状態変数及び入力項が等しい場合の(すなわちn=m)方法として知られており、安定した制御則をシステマティックに求めることができる利点がある。これに対し、改良バックステッピング法では、位置に関する状態変数(例えばn行1列)及び入力項(同じくm行1列とし、n>mとする)に関し、最初に入力項ではない位置に関する状態変数(n行1列)に対して理想的なフィードバック制御則を考え、次に、入力項ではない位置に関する状態変数(n行1列)と理想的なフィードバック制御則との差がゼロになるようにリアプノフ関数に基づいて入力項(m行1列)に対するフィードバック制御則を求めるものである。
【0030】
まず、数式3の運動方程式におけるcosθ,sinθは非線形項であり、かつ状態変数であるため、これらをそのまま旋回クレーンに対する制御入力とすることができない。そこで、数式5を変形することによりモデリング誤差σ1,σ2を下記の数式9により仮定し、t→∞の時にσ1→0,σ2→0となって数式5が成立するように制御装置を設計して制御入力uを求める。
【0031】
【数9】
【0032】
なお、数式9におけるフィードバックゲインF1x,F1y,F2x,F2yは、数式3の運動方程式に対するリカッチ方程式を解いて得られるものである。
始めに、数式9を微分して数式10を得る。
【0033】
【数10】
【0034】
次に数式3に基づく数式11を数式10に代入し、数式12,数式13を得る。
【0035】
【数11】
【0036】
【数12】
【0037】
【数13】
【0038】
ここで、数式14を仮定し、質点mの座標(x,y)の初期値をx(0)=r,y(0)=0とおいて数式14を解くと、数式15が得られる。
【0039】
【数14】
【0040】
【数15】
【0041】
すなわち、この場合には誤差σ1が値を持つため、前述した数式5は成立しなくなる。
これに対し、定数KS>0を導入して数式16を仮定すると、t→∞の時にσ1→0,σ2→0とすることができ、数式5を成立させることができる。
【0042】
【数16】
【0043】
そこで、数式12,数式16から数式17を得ると共に、数式13,数式16から数式18を得る
【0044】
【数17】
【0045】
【数18】
【0046】
ここで、制御入力uを導出するために、sin2θ+cos2θ=1を考慮して数式17×(−sinθ)+数式18×(cosθ)を計算し、数式19を得る。
【0047】
【数19】
【0048】
すなわち、ブーム10の目標旋回角速度ωr、目標旋回角度θr、実際の旋回角度θ及び水平旋回半径rと、吊り荷30の水平面内のx方向位置及びy方向位置と、吊り荷のx方向速度及びy方向速度と、フィードバックゲインF1x,F1y,F2x,F2y及び定数k,KSとを用いて、制御入力uを演算する。
よって、制御装置が数式19により演算した制御入力uを用いて旋回クレーンのブーム10を制御することにより、質点mの座標x,yをcosθr,sinθrに沿って移動させ、吊り荷30を目標旋回角度θrに等しい角度θで旋回させることができる。
また、上記制御入力uは、従来技術のようにtan−1の演算によって求めるものではないから、ブームの旋回角度に起因する特異点もなく、連続的かつ安定した振れ止め制御を行うことができる。
【0049】
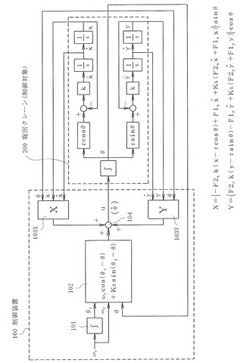
ここで、図1は、本実施形態に係る制御装置及び旋回クレーンのブロック図であり、100は制御装置、200は制御対象である旋回クレーンである。
制御装置100は、マイクロコンピュータ等のハードウェア及びソフトウェアによって構成されており、101は積分手段、102はブロック内に記載したωrcos(θr−θ)+KSsin(θr−θ)の演算を行う第1演算手段、103Xは吊り荷30のx方向位置及び速度に関する演算(図1の下端に示す「X」の演算)を行う第2演算手段(X方向演算手段)、103Yは同じくy方向位置及び速度に関する演算(図1の下端に示す「Y」の演算)を行う第3演算手段(Y方向演算手段)、104は加算手段である。
これらの第1,第2,第3演算手段102,103X,103Yによる演算結果が加算手段104にて加算されることにより、数式19の制御入力uが演算されて旋回クレーン200に与えられることになる。
【0050】
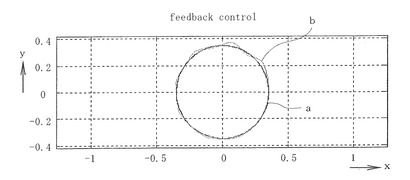
次に、本実施形態による効果を確認するために行ったシミュレーションの結果につき、図2〜図5を参照しつつ説明する。なお、ブーム10の旋回半径r=0.4[m]、ロープ20の長さL=0.4[m]、目標旋回角度θr=300[°]、目標旋回角速度ωr=22.5[°/秒]とし、数式19における各定数を、KS=1,F1x=F1y=3.4979×10−3,F2x=F2y=1.4846×10−1とした。
【0051】
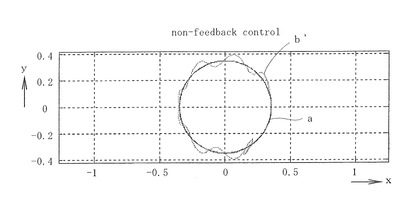
上記のシミュレーション条件のもとで、図2は、本実施形態によりフィードバック制御を行った場合のx−y平面内のブーム先端部の軌跡a及び吊り荷の軌跡bを示しており、図3は、フィードバック制御を行わない場合のx−y平面内のブーム先端部の軌跡a及び吊り荷の軌跡b’を示している。
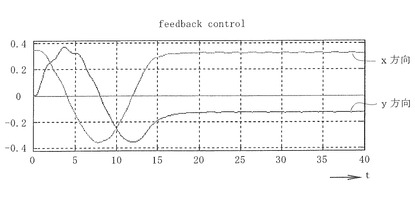
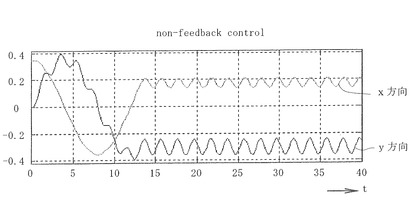
また、図4は、本実施形態によりフィードバック制御を行った場合の吊り荷のx方向位置、y方向位置の時間応答を示しており、図5は、フィードバック制御を行わない場合の吊り荷のx方向位置、y方向位置の時間応答を示している。
【0052】
図2,図3から明らかなように、本実施形態によれば、吊り荷の振れを好適に抑えながら、特異点もなく連続的かつ安定した旋回動作を可能にしている。また、図4,図5によれば、吊り荷が目標位置に到達してから振動することがなく、速やかにほぼ静止状態になっていることがわかる。
【0053】
なお、上述した実施形態では、数式19に基づいて制御入力uを求める場合につき説明したが、これ以外にも、円軌道との偏差をxe=x−rcosθ,ye=y−rsinθと定義することにより、数式19のようにx方向位置,y方向位置,x方向速度及びy方向速度を用いる代わりに、偏差xe,ye及びこれらに基づく速度(xe,yeの一階微分値)を用いた下記の数式20によって制御入力uを求めても良い。この数式20において、F1x,F1y,F2x,F2yはフィードバックゲイン、k,K0,K1,K2,KSは定数である。
【0054】
【数20】
【符号の説明】
【0055】
10:ブーム
20:ロープ
30:吊り荷
100:制御装置
101:積分手段
102:第1演算手段
103X:第2演算手段(X方向演算手段)
103Y:第3演算手段(Y方向演算手段)
104:加算手段
200:旋回クレーン(制御対象)
【技術分野】
【0001】
この発明は、旋回クレーンの吊り荷の振れを防止するための振れ止め制御方法、及び、この方法を実施するための制御装置に関するものである。
【背景技術】
【0002】
特許文献1には、旋回可能なブームに吊り下げられた吊り荷を運搬する旋回クレーンにおいて、ブームの旋回や外乱による吊り荷の振れを有効に防止するようにしたクレーンの制御方法及び制御装置が記載されている。
この従来技術に係る制御装置では、吊り荷を旋回移送する際の目標旋回角度のx,y方向成分と、フィードバックした吊り荷の位置及び速度のx,y方向成分とに基づき、吊り荷の振動が減衰振動になるように線形制御理論によって実際の旋回角度を演算し、この旋回角度をクレーンに入力して運転するものである。
【0003】
図6,図7は、特許文献1に記載されているものと同様に、ブーム及びロープを剛体とし、吊り荷を質量mの質点とすると共に、ロープ下端のフック及びロープの重量を無視して構成した旋回クレーンモデルを示しており、図7は図6をz軸方向から見た平面図である。
これらの図において、10はブーム、20はロープ(ワイヤ)、30は吊り荷であり、Oはブーム10の支点、Aはロープ20の支点、Bは支点Aのx,y平面への投影点、Cは吊り荷30のx,y平面への投影点、(x,y,z)は質点mの座標(位置)、Lはロープ20の長さ、hは支点Aのx,y平面からの高さ、rはブーム10すなわち支点Aの水平旋回半径、θはx軸と線分OBとのなす角度(旋回角度)、αは線分OBの延長線とロープ20とのなす角度、βはロープ20と線分ABとのなす振れ角度、fはロープ20の張力である。
【0004】
図6、図7より、質点mの座標(x,y,z)は数式1によって表される。
【0005】
【数1】
【0006】
また、質点m(その質量もmとする)が時間と共に移動する場合、質点mのx(t),y(t),z(t)方向の運動方程式は、数式2によって表される。
【0007】
【数2】
【0008】
振れ角度βは微小なためcosβを1と近似し、支点Aの高さh、ロープ20の長さL、旋回半径rを一定とすると、数式1,2から、ブーム10の旋回に関する数式3の運動方程式を得る。
【0009】
【数3】
【0010】
また、ブーム10の旋回角速度に関する運動方程式として、数式4を得る。なお、数式4において、uは制御入力である。
【0011】
【数4】
【0012】
いま、ブーム10(吊り荷30)の目標旋回角度θrと実際の旋回角度θとの関係を示す制御則を、数式5とおく。なお、数式5において、F1x,F1y,F2x,F2yはx,y方向の移動量及び速度に関するフィードバックゲインである。
【0013】
【数5】
【0014】
ここで、クレーンの数式モデルを数式6により表す。数式6において、gは重力加速度である。
【0015】
【数6】
【0016】
次に、ゲインF1x,F1y,F2x,F2yを求めるために、数式5におけるθを数式6に代入し、数式7を得る。
【0017】
【数7】
【0018】
特許文献1に係る従来技術では、数式7におけるx,y方向の移動量、速度及び加速度が何れも減衰振動になるように、線形制御理論を用いてゲインF1x,F1y,F2x,F2yを決定し、目標旋回角度θrのx方向成分、y方向成分であるcosθr,sinθrに沿って質点mの座標(x,y)が移動するように制御を行う。
すなわち、制御装置に目標旋回角度θrが入力されてそのx方向成分cosθr及びy方向成分sinθrが算出されると共に、これらの値とクレーンからフィードバックされたx,y方向の移動量及び速度、並びにゲインF1x,F1y,F2x,F2yを用いて、数式5から得た下記の数式8によりブームの旋回角度θが演算される。
【0019】
【数8】
【0020】
上記従来技術では、数式8により演算した旋回角度θをクレーンに入力して運転することにより、吊り荷30の振れを最小限に抑えながらブームを旋回させ、吊り荷30が目標旋回角度θrに達したときの残存振れの発生を抑えて振れ止め制御を行うことを可能にしている。
【先行技術文献】
【特許文献】
【0021】
【特許文献1】特開2001−106474号公報(段落[0021]〜[0032]、図1〜図4等)
【発明の概要】
【発明が解決しようとする課題】
【0022】
しかしながら、上記従来技術では、数式8における分母が0になる時(すなわち、数式5からcosθ=0になる時)にtanθ=∞となって制御装置が特異点を持つため、制御不能になるという問題があった。
ここで、図8は、目標旋回角度θrを300[°]とした場合の従来技術による吊り荷の軌跡を示す概念図であり、一点鎖線は目標軌道、実線は吊り荷の実際の軌跡、Sはスタート地点、Eは目標地点をそれぞれ示している。この図8から明らかなように、cosθ=0となる旋回角度90[°]及び270[°]の位置が特異点となり、振れ止め制御が不能になって吊り荷が大きく振れることとなる。
このような問題を解決するため、従来技術では、数式8の分母が0にならないようにプログラム上の対応策を講じなくてはならず、これがコスト上昇の原因となっていた。
【0023】
そこで、本発明の解決課題は、ブームの旋回角度に起因する特異点を持たずに、旋回クレーンの連続的かつ安定した振れ止め制御を可能にした旋回クレーンの振れ止め制御方法及び制御装置を提供することにある。
【課題を解決するための手段】
【0024】
上記課題を解決するため、請求項1に係る振れ止め制御方法は、旋回クレーンのブームから吊り下げられた吊り荷を前記ブームの水平面内の旋回により目標位置へ運搬するための旋回クレーンの制御方法であって、前記ブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を演算する制御方法において、
前記制御入力を、前記ブームの目標旋回角速度と、前記ブームの目標旋回角度と、前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のx方向位置及びy方向位置,前記吊り荷のx方向速度及びy方向速度と、フィードバックゲイン及び定数とを用いて、改良バックステッピング法により演算するものである。
【0025】
請求項2に記載するように、前記制御入力は、例えば後述する数式19によって演算することができる。
【0026】
また、請求項3に係る振れ止め制御装置は、旋回クレーンのブームから吊り下げられた吊り荷を前記ブームの水平面内の旋回により目標位置へ運搬するための旋回クレーンの制御装置であって、前記ブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を改良バックステッピング法により演算する制御装置において、
前記ブームの目標旋回角速度と、前記ブームの目標旋回角度と、前記ブームの実際の旋回角度と、定数とを用いて、第1加算成分を演算する第1演算手段と、
前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のx方向位置及びx方向速度と、フィードバックゲイン及び定数とを用いて、第2加算成分を演算する第2演算手段と、
前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のy方向位置及びy方向速度と、フィードバックゲイン及び定数とを用いて、第3加算成分を演算する第3演算手段と、
前記第1加算成分、第2加算成分及び第3加算成分を加算して前記制御入力を演算する加算手段と、を備えたものである。
【発明の効果】
【0027】
本発明によれば、特許文献1に記載されているようにtan−1の演算によってクレーンに入力する旋回角度を求める演算によらず、改良バックステッピング法により求めた制御入力をクレーンに与えることにより、ブームの旋回角度に起因する特異点もなく、連続的かつ安定した旋回クレーンの振れ止め制御を行うことができる。
【図面の簡単な説明】
【0028】
【図1】本発明の実施形態に係る制御装置及び旋回クレーンのブロック図である。
【図2】シミュレーションによる吊り荷の軌跡を示す図である。
【図3】シミュレーションによる吊り荷の軌跡を示す図である。
【図4】シミュレーションによる吊り荷のx,y方向の位置の時間応答を示す図である。
【図5】シミュレーションによる吊り荷のx,y方向の位置の時間応答を示す図である。
【図6】旋回クレーンモデルの説明図である。
【図7】図6をz軸方向から見た平面図である。
【図8】従来技術による吊り荷の軌跡を示す概念図である。
【発明を実施するための形態】
【0029】
以下、図に沿って本発明の実施形態を説明する。なお、この実施形態が適用される旋回クレーンのモデルは、図6,図7に記載したものと同一である。
まず、この実施形態では、改良バックステッピング法を用いて旋回クレーンに対する制御入力uを求めるように制御装置を設計する。
ここで、いわゆるバックステッピング法は、以下に示す改良バックステッピング法において、位置に関する状態変数及び入力項が等しい場合の(すなわちn=m)方法として知られており、安定した制御則をシステマティックに求めることができる利点がある。これに対し、改良バックステッピング法では、位置に関する状態変数(例えばn行1列)及び入力項(同じくm行1列とし、n>mとする)に関し、最初に入力項ではない位置に関する状態変数(n行1列)に対して理想的なフィードバック制御則を考え、次に、入力項ではない位置に関する状態変数(n行1列)と理想的なフィードバック制御則との差がゼロになるようにリアプノフ関数に基づいて入力項(m行1列)に対するフィードバック制御則を求めるものである。
【0030】
まず、数式3の運動方程式におけるcosθ,sinθは非線形項であり、かつ状態変数であるため、これらをそのまま旋回クレーンに対する制御入力とすることができない。そこで、数式5を変形することによりモデリング誤差σ1,σ2を下記の数式9により仮定し、t→∞の時にσ1→0,σ2→0となって数式5が成立するように制御装置を設計して制御入力uを求める。
【0031】
【数9】
【0032】
なお、数式9におけるフィードバックゲインF1x,F1y,F2x,F2yは、数式3の運動方程式に対するリカッチ方程式を解いて得られるものである。
始めに、数式9を微分して数式10を得る。
【0033】
【数10】
【0034】
次に数式3に基づく数式11を数式10に代入し、数式12,数式13を得る。
【0035】
【数11】
【0036】
【数12】
【0037】
【数13】
【0038】
ここで、数式14を仮定し、質点mの座標(x,y)の初期値をx(0)=r,y(0)=0とおいて数式14を解くと、数式15が得られる。
【0039】
【数14】
【0040】
【数15】
【0041】
すなわち、この場合には誤差σ1が値を持つため、前述した数式5は成立しなくなる。
これに対し、定数KS>0を導入して数式16を仮定すると、t→∞の時にσ1→0,σ2→0とすることができ、数式5を成立させることができる。
【0042】
【数16】
【0043】
そこで、数式12,数式16から数式17を得ると共に、数式13,数式16から数式18を得る
【0044】
【数17】
【0045】
【数18】
【0046】
ここで、制御入力uを導出するために、sin2θ+cos2θ=1を考慮して数式17×(−sinθ)+数式18×(cosθ)を計算し、数式19を得る。
【0047】
【数19】
【0048】
すなわち、ブーム10の目標旋回角速度ωr、目標旋回角度θr、実際の旋回角度θ及び水平旋回半径rと、吊り荷30の水平面内のx方向位置及びy方向位置と、吊り荷のx方向速度及びy方向速度と、フィードバックゲインF1x,F1y,F2x,F2y及び定数k,KSとを用いて、制御入力uを演算する。
よって、制御装置が数式19により演算した制御入力uを用いて旋回クレーンのブーム10を制御することにより、質点mの座標x,yをcosθr,sinθrに沿って移動させ、吊り荷30を目標旋回角度θrに等しい角度θで旋回させることができる。
また、上記制御入力uは、従来技術のようにtan−1の演算によって求めるものではないから、ブームの旋回角度に起因する特異点もなく、連続的かつ安定した振れ止め制御を行うことができる。
【0049】
ここで、図1は、本実施形態に係る制御装置及び旋回クレーンのブロック図であり、100は制御装置、200は制御対象である旋回クレーンである。
制御装置100は、マイクロコンピュータ等のハードウェア及びソフトウェアによって構成されており、101は積分手段、102はブロック内に記載したωrcos(θr−θ)+KSsin(θr−θ)の演算を行う第1演算手段、103Xは吊り荷30のx方向位置及び速度に関する演算(図1の下端に示す「X」の演算)を行う第2演算手段(X方向演算手段)、103Yは同じくy方向位置及び速度に関する演算(図1の下端に示す「Y」の演算)を行う第3演算手段(Y方向演算手段)、104は加算手段である。
これらの第1,第2,第3演算手段102,103X,103Yによる演算結果が加算手段104にて加算されることにより、数式19の制御入力uが演算されて旋回クレーン200に与えられることになる。
【0050】
次に、本実施形態による効果を確認するために行ったシミュレーションの結果につき、図2〜図5を参照しつつ説明する。なお、ブーム10の旋回半径r=0.4[m]、ロープ20の長さL=0.4[m]、目標旋回角度θr=300[°]、目標旋回角速度ωr=22.5[°/秒]とし、数式19における各定数を、KS=1,F1x=F1y=3.4979×10−3,F2x=F2y=1.4846×10−1とした。
【0051】
上記のシミュレーション条件のもとで、図2は、本実施形態によりフィードバック制御を行った場合のx−y平面内のブーム先端部の軌跡a及び吊り荷の軌跡bを示しており、図3は、フィードバック制御を行わない場合のx−y平面内のブーム先端部の軌跡a及び吊り荷の軌跡b’を示している。
また、図4は、本実施形態によりフィードバック制御を行った場合の吊り荷のx方向位置、y方向位置の時間応答を示しており、図5は、フィードバック制御を行わない場合の吊り荷のx方向位置、y方向位置の時間応答を示している。
【0052】
図2,図3から明らかなように、本実施形態によれば、吊り荷の振れを好適に抑えながら、特異点もなく連続的かつ安定した旋回動作を可能にしている。また、図4,図5によれば、吊り荷が目標位置に到達してから振動することがなく、速やかにほぼ静止状態になっていることがわかる。
【0053】
なお、上述した実施形態では、数式19に基づいて制御入力uを求める場合につき説明したが、これ以外にも、円軌道との偏差をxe=x−rcosθ,ye=y−rsinθと定義することにより、数式19のようにx方向位置,y方向位置,x方向速度及びy方向速度を用いる代わりに、偏差xe,ye及びこれらに基づく速度(xe,yeの一階微分値)を用いた下記の数式20によって制御入力uを求めても良い。この数式20において、F1x,F1y,F2x,F2yはフィードバックゲイン、k,K0,K1,K2,KSは定数である。
【0054】
【数20】
【符号の説明】
【0055】
10:ブーム
20:ロープ
30:吊り荷
100:制御装置
101:積分手段
102:第1演算手段
103X:第2演算手段(X方向演算手段)
103Y:第3演算手段(Y方向演算手段)
104:加算手段
200:旋回クレーン(制御対象)
【特許請求の範囲】
【請求項1】
旋回クレーンのブームから吊り下げられた吊り荷を前記ブームの水平面内の旋回により目標位置へ運搬するための旋回クレーンの制御方法であって、前記ブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を演算する制御方法において、
前記制御入力を、前記ブームの目標旋回角速度と、前記ブームの目標旋回角度と、前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のx方向位置及びy方向位置,前記吊り荷のx方向速度及びy方向速度と、フィードバックゲイン及び定数とを用いて、改良バックステッピング法により演算することを特徴とする旋回クレーンの振れ止め制御方法。
【請求項2】
請求項1に記載した旋回クレーンの振れ止め制御方法において、
前記制御入力を、以下の数式19により演算することを特徴とする旋回クレーンの振れ止め制御方法。
【数19】
なお、上記数式において、
u:制御入力
ωr:ブームの目標旋回角速度
θr:ブームの目標旋回角度
θ:ブームの実際の旋回角度
r:ブームの水平旋回半径
x:吊り荷の水平面内のx方向位置
F1x,F1y,F2x,F2y:フィードバックゲイン
k,KS:定数
【請求項3】
旋回クレーンのブームから吊り下げられた吊り荷を前記ブームの水平面内の旋回により目標位置へ運搬するための旋回クレーンの制御装置であって、前記ブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を改良バックステッピング法により演算する制御装置において、
前記ブームの目標旋回角速度と、前記ブームの目標旋回角度と、前記ブームの実際の旋回角度と、定数とを用いて、第1加算成分を演算する第1演算手段と、
前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のx方向位置及びx方向速度と、フィードバックゲイン及び定数とを用いて、第2加算成分を演算する第2演算手段と、
前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のy方向位置及びy方向速度と、フィードバックゲイン及び定数とを用いて、第3加算成分を演算する第3演算手段と、
前記第1加算成分、第2加算成分及び第3加算成分を加算して前記制御入力を演算する加算手段と、
を備えたことを特徴とする旋回クレーンの振れ止め制御装置。
【請求項1】
旋回クレーンのブームから吊り下げられた吊り荷を前記ブームの水平面内の旋回により目標位置へ運搬するための旋回クレーンの制御方法であって、前記ブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を演算する制御方法において、
前記制御入力を、前記ブームの目標旋回角速度と、前記ブームの目標旋回角度と、前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のx方向位置及びy方向位置,前記吊り荷のx方向速度及びy方向速度と、フィードバックゲイン及び定数とを用いて、改良バックステッピング法により演算することを特徴とする旋回クレーンの振れ止め制御方法。
【請求項2】
請求項1に記載した旋回クレーンの振れ止め制御方法において、
前記制御入力を、以下の数式19により演算することを特徴とする旋回クレーンの振れ止め制御方法。
【数19】
なお、上記数式において、
u:制御入力
ωr:ブームの目標旋回角速度
θr:ブームの目標旋回角度
θ:ブームの実際の旋回角度
r:ブームの水平旋回半径
x:吊り荷の水平面内のx方向位置
F1x,F1y,F2x,F2y:フィードバックゲイン
k,KS:定数
【請求項3】
旋回クレーンのブームから吊り下げられた吊り荷を前記ブームの水平面内の旋回により目標位置へ運搬するための旋回クレーンの制御装置であって、前記ブームの旋回に関する運動方程式に基づく制御則に従って旋回クレーンを駆動するための制御入力を改良バックステッピング法により演算する制御装置において、
前記ブームの目標旋回角速度と、前記ブームの目標旋回角度と、前記ブームの実際の旋回角度と、定数とを用いて、第1加算成分を演算する第1演算手段と、
前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のx方向位置及びx方向速度と、フィードバックゲイン及び定数とを用いて、第2加算成分を演算する第2演算手段と、
前記ブームの水平旋回半径と、旋回クレーンからフィードバックされた前記ブームの実際の旋回角度,前記吊り荷の水平面内のy方向位置及びy方向速度と、フィードバックゲイン及び定数とを用いて、第3加算成分を演算する第3演算手段と、
前記第1加算成分、第2加算成分及び第3加算成分を加算して前記制御入力を演算する加算手段と、
を備えたことを特徴とする旋回クレーンの振れ止め制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−111242(P2011−111242A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−266296(P2009−266296)
【出願日】平成21年11月24日(2009.11.24)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り (1)刊行物名:第11回「運動と振動の制御」シンポジウム講演論文集 (2)発行日:平成21年9月1日 (3)発行者:社団法人 日本機械学会
【出願人】(502367845)富士アイティ株式会社 (5)
【出願人】(000125369)学校法人東海大学 (352)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月24日(2009.11.24)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り (1)刊行物名:第11回「運動と振動の制御」シンポジウム講演論文集 (2)発行日:平成21年9月1日 (3)発行者:社団法人 日本機械学会
【出願人】(502367845)富士アイティ株式会社 (5)
【出願人】(000125369)学校法人東海大学 (352)
【Fターム(参考)】
[ Back to top ]