
昇圧コンバータ制御装置、モータ制御装置、電気自動車
【課題】力行動作/回生動作の切り替わり時にも昇圧コンバータから安定した電圧を出力することが可能な昇圧コンバータ制御装置、モータ制御装置、電気自動車を提供すること。
【解決手段】昇圧コンバータ10を構成する2のトランジスタ11、12のオン/オフを切り替える信号が出力されたときから、この信号によりトランジスタ12の出力電圧が変化するまでの遅延時間を計測し、計測された遅延時間に基づきトランジスタ11、12のオン/オフを切り替える信号のデューティを補正する。
【解決手段】昇圧コンバータ10を構成する2のトランジスタ11、12のオン/オフを切り替える信号が出力されたときから、この信号によりトランジスタ12の出力電圧が変化するまでの遅延時間を計測し、計測された遅延時間に基づきトランジスタ11、12のオン/オフを切り替える信号のデューティを補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電気自動車用の昇圧コンバータ制御装置、モータ制御装置及び、これらを搭載した電気自動車に関する。
【背景技術】
【0002】
近年、エンジンと、バッテリと、バッテリの直流電力を交流電力に変換するインバータと、インバータにより変換された交流電力によって駆動される走行用モータとを有するハイブリッド自動車が普及しつつある。このハイブリッド自動車の中には、2つのトランジスタから構成され、バッテリとインバータとの間に備えられた昇圧コンバータを有するものがある。
【0003】
昇圧コンバータは、走行用モータの力行動作時にはバッテリの電力を昇圧してインバータに供給し、走行用モータの回生動作時にはインバータからの回生電力を降圧してバッテリを充電する。昇圧コンバータの出力電圧は、2つのトランジスタのオン/オフの制御により、インバータへの入力電圧目標値となるように制御される。尚インバータへの入力電圧目標値は、走行用モータの動作状態等により決定される。
【0004】
図7は、従来の昇圧コンバータを説明する図である。昇圧コンバータ10は、バッテリ20とインバータ30との間に接続されており、上アームのトランジスタ11とダイオード13、下アームのトランジスタ12とダイオード14を有する。トランジスタ11、12は、IGBT(Insulated Gate Bipolar Transistor)である。トランジスタ11のエミッタとトランジスタ12のコレクタとは接続されており、リアクトルL1の一端と接続されている。リアクトルL1の他端は、バッテリ20の正極に接続されている。
【0005】
トランジスタ11のコレクタはインバータ30の電源ラインと接続されており、トランジスタ12のエミッタはインバータ30のアースラインと接続されている。またトランジスタ12のエミッタは、バッテリ20の負極へ接続されている。インバータ20は走行用モータ50の駆動を制御する。インバータ30の電源ラインとアースラインとの間には、平滑化コンデンサC1が接続されている。
【0006】
トランジスタ11、12のゲートは、制御回路40と接続されており、トランジスタ11、12のオン/オフの切り替えを制御する制御信号が入力される。制御装回路40は、昇圧コンバータ10の出力電圧がインバータへの入力電圧目標値となるようにトランジスタ11、12のオン/オフを切り替える。
【0007】
ところで昇圧コンバータ10には、通常は上アームと下アームとの短絡防止のためのデッドタイム(トランジスタ11、12が両方オフとなる時間)が設定されおり、このデッドタイムの影響により力行動作/回生動作の切り替えの際に出力電圧が変動する。このため昇圧コンバータの出力電圧の変動を抑制するための工夫がなされている。例えば特許文献1では、トランジスタのオン/オフの切り替えを行う信号のデューティ比をデッドタイム分だけ増減させる昇圧コンバータ制御装置が記載されている。
【特許文献1】特開2004−120844号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、デッドタイムには、回路や素子の特性に起因するばらつきが存在する。このため特許文献1記載の発明のようにデューティ比をデッドタイム分だけ増減させたとしても、ばらつきによる出力電圧の変動を吸収することはできない。
【0009】
本発明はこのような課題を解決するためのものであり、力行動作/回生動作の切り替わり時にも昇圧コンバータから安定した電圧を出力することが可能な昇圧コンバータ制御装置、モータ制御装置、電気自動車を提供することを、主たる目的とする。
【課題を解決するための手段】
【0010】
本発明は、上記目的を達成するために以下の如き構成を採用した。
【0011】
本発明は、第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置であって、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから、前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する構成とした。
【0012】
また本発明の昇圧コンバータ制御装置は、前記制御信号が反転してから、前記レベルが変化するまでの時間を計測する計測手段を有する構成とした。
【0013】
また本発明の昇圧コンバータ制御装置は、前記昇圧コンバータと接続されたインバータにより駆動されるモータの動作が力行動作か、又は回生動作かを判定する判定手段を有し、
前記第一のスイッチング素子は上アームのスイッチング素子であり、前記第二のスイッチング素子は下アームのスイッチング素子であって、
前記補正手段は、
前記判定手段により前記モータの動作が回生動作と判定された場合、前記上アームのスイッチング素子のオン/オフを制御する第一の制御信号が反転してから、前記出力電圧のレベルが変化するまでの時間に基づき補正を行い、
前記判定手段により前記モータの動作が力行動作と判定された場合、前記下アームのスイッチング素子のオン/オフを制御する第二の制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき補正を行う構成とした。
【0014】
また本発明の昇圧コンバータ制御装置において、前記補正手段は、
前記第二の制御信号のデューティを前記計測手段により計測された時間に基づき補正し、
前記第一の制御信号のデューティを、前記第二の制御信号のデューティと、予め設定された前記上アームのスイッチング素子及び下アームのスイッチング素子がオフとされるオフ時間と、に基づき補正する構成とした。
【0015】
また本発明の昇圧コンバータ制御装置において、前記判定手段により前記モータの動作が回生動作と判定された場合、
前記計測手段は、
前記第一の制御信号が、前記上アームのスイッチング素子をオフする信号からオンする信号へ反転してから、前記出力電圧のレベルが変化するまでの第一の時間と、
前記第一の制御信号が、前記上アームのスイッチング素子をオンする信号からオフする信号へ反転してから、前記出力電圧のレベルが変化するまでの第二の時間と、を計測し、
前記補正手段は、
前記下アームのスイッチング素子がオンされるべき目標オン時間から、前記第一の時間と前記第二の時間との時間差と前記オフ時間とを減算して前記第二の制御信号のデューティを補正する構成とした。
【0016】
また本発明の昇圧コンバータ制御装置において、前記判定手段により前記モータの動作が力行動作と判定された場合、
前記計測手段は、
前記第二の制御信号が、前記下アームのスイッチング素子をオフする信号からオンする信号へ反転してから、前記出力電圧のレベルが変化するまでの第一の時間と、
前記第二の制御信号が、前記下アームのスイッチング素子をオンする信号からオフする信号に反転してから、前記出力電圧のレベルが変化するまでの第二の時間と、を計測し、
前記補正手段は、
前記第一の時間と前記第二の時間との時間差を、前記下アームのスイッチング素子がオンされるべき目標オン時間に加算して、前記第二の制御信号のデューティを補正する構成とした。
【0017】
本発明は、第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置と、前記昇圧コンバータの出力電圧が供給されるインバータとを有し、前記インバータから供給される電力により駆動されるモータを制御するモータ制御装置であって、
前記昇圧コンバータ制御装置は、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する構成とした。
【0018】
本発明は、第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置と、前記昇圧コンバータを介してインバータに電力を供給するバッテリと、前記インバータから供給される電力により駆動する走行用モータと、を有する電気自動車であって、
前記昇圧コンバータ制御装置は、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する構成とした。
【発明の効果】
【0019】
本発明によれば、力行動作/回生動作の切り替わり時にも昇圧コンバータから安定した電圧を出力することができる。
【発明を実施するための最良の形態】
【0020】
本発明は、昇圧コンバータを構成するトランジスタのオン/オフを切り替える信号が出力されたときから、この信号により昇圧コンバータの出力電圧が変化するまでの遅延時間を計測し、計測された遅延時間に基づき2つのトランジスタのオン/オフを切り替える信号のデューティ比を補正する。本発明では、この補正により走行用モータの動作が力行動作/回生動作に切り替わった際にも、デッドタイムによる出力電圧の変動を抑制することができる。
【0021】
以下に、本発明の実施形態の説明に先立ち、図1、図2を参照して力行動作/回生動作の切り替わりの際の昇圧コンバータの出力電圧について説明する。図1は、力行動作時及び回生動作時の昇圧コンバータを説明する図である。図2は、力行動作時及び回生動作時の昇圧コンバータの出力電圧の波形を示す図である。
【0022】
図1(A)は、力行動作時の昇圧コンバータを説明する図であり、図1(B)は、回生動作時の昇圧コンバータを説明する図である。尚図1に示す昇圧コンバータは、図7で説明した従来の昇圧コンバータ10と同様の構成であるから、以下の図1の説明では図7の説明で用いた符号と同様の符号を用いる。
【0023】
始めに力行動作時について説明する。インバータ30(図1では図示せず)により駆動される走行用モータ50(図1では図示せず)が力行動作を行っている場合、リアクトルL1には正の向きの電流(Il>0)が流れる。
【0024】
昇圧コンバータ10の上アームのトランジスタ11がオン、下アームのトランジスタ12がオフのとき(以下、状態1)、リアクトルL1を流れる電流Ilは、ダイオード13を通ってインバータ30へ流れる。このときインバータ30に供給される昇圧コンバータ10の出力電圧をVoとすると、トランジスタ11のエミッタとトランジスタ12のコレクタとの接続点Aの電圧Vceは出力電圧Voとなる。尚実際にはダイオード13の電圧降下が発生するが、昇圧コンバータ10の出力電圧と比べて十分小さい電圧であるため、以下の説明ではダイオード13の電圧降下は考慮しない。またトランジスタ11、トランジスタ12は、ゲートにハイレベル(以下、Hレベル)の信号が印加されるとオンになり、ローレベル(以下、Lレベル)の信号が印加されるオフとなる。
【0025】
次に上アームのトランジスタ11、下アームのトランジスタ12が共にオフのとき(以下、状態2)、電流Ilは状態1と同様にダイオード13を介してインバータ30へ流れる。よって接続点Aの電圧Vceは出力電圧Voのままである。尚状態2である期間が、上下アームの短絡を防止するためのデッドタイムとなる。
【0026】
続いて上アームのトランジスタ11がオフ、下アームのトランジスタ12がオンのとき(以下、状態3)、電流Ilはトランジスタ12を介して負極へ流れる。よって接続点Aの電圧Vceは0となる。
【0027】
次に回生動作時について説明する。インバータ30により駆動される走行用モータ50が回生動作を行っている場合、リアクトルL1には負の向きの電流(Il<0)が流れる。
【0028】
状態1において、電流Ilはトランジスタ11を介してリアクトルL1へ流れる。よって接続点Aの電圧Vceは出力電圧Voとなる。状態2において、電流IlはダイオードD14を通ってリアクトルL1へ流れる。よって接続点Aの電圧Vceは0である。状態3においても状態2と同様に、電流Ilはダイオード14を通ってリアクトルL1へ流れるため、接続点Aの電圧Vceは0である。
【0029】
よって力行動作時において、接続点Aの電圧Vceは、状態1、状態2のときはVo(Hレベル)であり、状態3のとき0(Lレベル)となる。また回生動作時において、接続点Aの電圧Vceは、状態1ときのみHレベルとなり、状態2、状態3のときはLレベルとなる。
【0030】
よって力行動作時と回生動作時では、電圧Vceのデューティが異なる。昇圧コンバータ10の出力電圧は、電圧Vceのデューティにより決定されるため、このデューティが変動すると昇圧コンバータ10の出力電圧も変動する。したがって、力行動作と回生動作の切り替わりの際には、電圧Vceのデューティの変動が発生し、昇圧コンバータ10の出力電圧が変動するという問題が発生する。
【0031】
また実際にトランジスタ11、12のゲートに、オン/オフを切り替える制御信号が入力されてから、実際にトランジスタ11、12のオン/オフが切り替わるまでに遅延時間が生じる。この遅延時間は、電圧Vceのデューティの変動に影響する。
【0032】
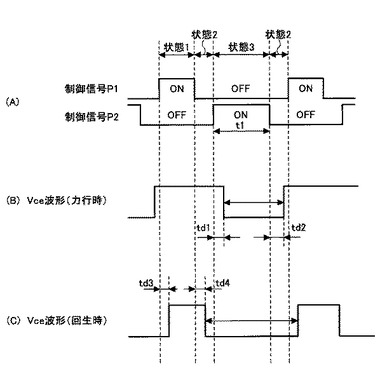
図2には制御信号P1、P2と電圧Vceの波形が示されている。図2(A)は、制御回路40から出力されるトランジスタ11、トランジスタ12のオン/オフを切り替える制御信号P1、P2を示す。図2(B)は、力行動作時における昇圧コンバータ10の接続点Aの電圧Vceを示し、図2(C)は、回生動作時における昇圧コンバータ10の接続点Aの電圧Vceを示す。
【0033】
例えば力行動作の場合、トランジスタ12に対して出力される制御信号P2がLレベルからHレベルに反転して状態3となってから、電圧VceがLレベルとなるまでに遅延時間td1が発生する。またトランジスタ12に対して出力される制御信号P2がHレベルからLレベルに反転して状態2となってから、電圧VceがHレベルとなるまでに遅延時間td2が発生する。よって電圧Vceのデューティは遅延時間td1、td2によっても変動する。
【0034】
回生動作の場合、トランジスタ11に対して出力される制御信号P1がLレベルからHレベルに反転して状態1となってから、電圧VceがHレベルとなるまでに遅延時間td3が発生する。またトランジスタ11に対して出力される制御信号P1がHレベルからLレベルに反転して状態2となってから、電圧VceがLレベルとなるまでに遅延時間td4が発生する。よって電圧Vceのデューティは遅延時間td3、td4によっても変動する。
【0035】
本発明は、上述の力行動作と回生動作との切り替えや遅延時間により生じる電圧Vceのデューティの変動を補正するものである。
【0036】
(実施形態)
以下に図面を参照して本発明の実施形態について説明する。図3は、昇圧コンバータ制御装置を含む電気自動車の概略構成図である。尚以下の本実施形態の説明において、図7で説明した回路構成と同様の構成を有するものには、図7の説明で用いた符号と同様の符号を付与する。
【0037】
電気自動車100は、バッテリの電力を用いて走行用モータ50を駆動することにより車両を駆動する自動車である。電気自動車100は、例えばハイブリット自動車等である。
【0038】
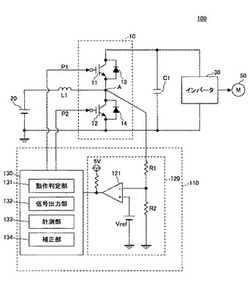
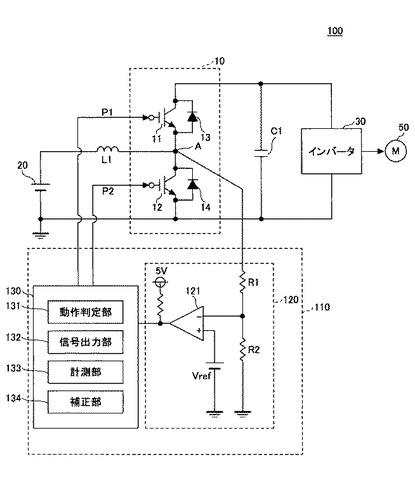
電気自動車100は、走行用モータ50を駆動するインバータ30、インバータ30と並列に接続された平滑化コンデンサC1、バッテリ20とインバータ30との間に設けられた昇圧コンバータ10、昇圧コンバータ10を制御する昇圧コンバータ制御装置110、リアクトルL1を有する。
【0039】
昇圧コンバータ10は、上アームのトランジスタ11、ダイオード13、下アームのトランジスタ12、ダイオード14を有する。本実施形態のトランジスタ11は第一のスイッチング素子であり、トランジスタ12は第二のスイッチング素子である。トランジスタ11、12はIGBTやMOSFET(metal-oxide-semiconductor field-effect transistor)等であり、昇圧コンバータ制御装置110からゲートへ入力される制御信号によりオン/オフが制御される。
【0040】
トランジスタ11、12は、インバータ30の電源ラインとアースラインとの間に直列に接続されている。トランジスタ11のコレクタは電源ラインと接続されており、トランジスタ11のエミッタはトランジスタ12のコレクタと接続されている。トランジスタ12のエミッタはアースライン及びバッテリ20の負極に接続されている。
【0041】
トランジスタ11のエミッタとトランジスタ12のコレクタとの接続点Aは、リアクトルL1の一端と接続されている。リアクトルL1の他端はバッテリ20の正極に接続されている。トランジスタ11とトランジスタ12のコレクタ−エミッタ間には、エミッタ側からコレクタ側へ電流を流すように、ダイオード13、14がそれぞれ接続されている。
【0042】
インバータ30は、昇圧コンバータ10から供給される直流電力を交流電力に変換し、走行用モータ50へ供給する。これにより走行用モータ50が回転駆動される。インバータ30の電源ラインとアースラインとの間には、平滑化コンデンサC1が接続されている。インバータ30は、電源ラインとアースラインとの間に互いに並列に配置されるU相、V相、W相の各アーム(図示せず)から構成される。各アームは、2つのスイッチング素子の直列接続から構成される。また各アームを構成するスイッチング素子のコレクタ−エミッタ間には、それぞれエミッタ側からコレクタ側に電流を流すダイオードが配置されている。
【0043】
昇圧コンバータ制御装置110は、トランジスタ11とトランジスタ12のゲートに、それぞれのオン/オフさせる制御信号P1、P2を出力する。また本実施形態の昇圧コンバータ制御装置110は、接続点Aの電圧レベルの変動に基づき制御信号P1、P2のデューティを補正する。以下に昇圧コンバータ制御装置110の詳細を説明する。
【0044】
本実施形態の昇圧コンバータ110は、電圧検出部120、演算部130を有する。
【0045】
電圧検出部120は、抵抗R1、R2、コンパレータ121、基準電圧Vrefを有し、昇圧コンバータ10の接続点Aの電圧レベル、即ちトランジスタ12のエミッタ−コレクタ間電圧の変化を検出する。抵抗R1、R2は直列に接続されており、抵抗R1の一端が接続点Aと接続され、抵抗R2の一端が接地されている。コンパレータ121の反転入力端子には、抵抗R1と抵抗R2により分圧された接続点Aの電圧Vceが入力される。コンパレータ121の非反転入力端子には基準電圧Vrefが入力される。
【0046】
コンパレータ121の出力端子は、演算部130と接続されており、コンパレータ121の出力信号は演算部130へ供給される。本実施形態のコパレータ121は、例えば接続点Aの電圧Vceが所定値より高くなったときLレベルの信号を出力し、接続点Aの電圧Vceが所定値より低くなったときHレベルを出力しても良い。
【0047】
演算部130は、CPU(Central Processing Unit)等により実現される。演算部130の有する各部の機能は、CPUにより、図示しないメモリに格納されたプログラムを読み出して実行することにより実現される。
【0048】
演算部130は、動作判定部131、信号出力部132、計測部133、補正部134を有する。動作判定部131は、電気自動車100の走行状態等に基づき、走行用モータ50が力行動作をしているか、又は回生動作をしているかを判定する。信号出力部132は、トランジスタ11、12のオン/オフを切り替える制御信号P1、P2を出力する。
【0049】
計測部133は、信号出力部132から出力される制御信号P1、P2が反転してから、電圧検出部120により接続点Aの電圧Vceのレベル変化が検出されるのまでの時間を計測する。補正部134は、計測部133により計測された計測時間に基づき、信号出力部132から出力される制御信号P1、P2のデューティを補正する。尚計測部133は、信号出力部132から制御信号P1、P2が出力される度に(パルス毎に)計測を行い、補正部134は計測部133が計測する度に補正を行っても良い。
【0050】
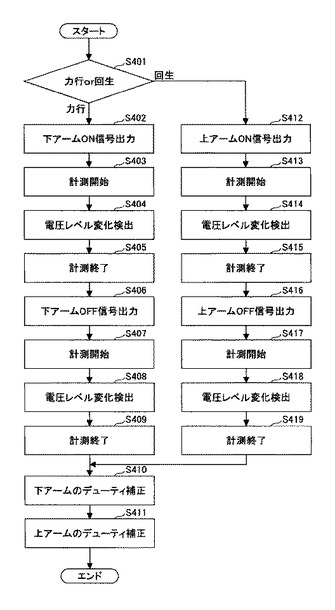
次に図4を参照して昇圧コンバータ制御装置110の動作を接続する。図4は、昇圧コンバータ制御装置110の動作を説明するフローチャートである。
【0051】
電気自動車100が走行を開始すると、ステップ401において、動作判定部131により走行用モータ50が力行動作をしているか、又は回生動作をしているかを判定する。
【0052】
走行用モータ50が力行動作をしている場合、接続点Aの電圧Vceのレベルは、トランジスタ12のオン/オフにより変化する。よってこの場合、計測部133は制御信号P2が反転してから、電圧Vceのレベルが変化するまでの遅延時間を計測する。
【0053】
ステップ402において、信号出力部132から下アームのトランジスタ12をオンにするHレベルの制御信号P2が出力されると、ステップ403へ進み、計測部133は遅延時間td1の計測を開始する。
【0054】
ステップ404において、電圧検出部120により接続点Aの電圧Vceのレベル変化が検出されると、ステップ405に進み、計測部133は遅延時間td1の計測を終了する。尚具体的には電圧検出部120は、接続点Aの電圧VceがHレベルからLレベルへ変化したことを検出する。ここで計測された遅延時間td1は、昇圧コンバータ制御装置110の有する図示しないメモリ等に保持される。
【0055】
次にステップ406において、信号出力部132から出力される制御信号P2が反転し、トランジスタ12をオフにするLレベルの制御信号P2が出力されると、ステップ407に進み、計測部133は遅延時間td2の計測を開始する。ステップ408において、電圧検出部120により接続点の電圧Vceのレベル変化(LレベルからHレベルへの変化)が検出されると、ステップ409に進み、計測部133は遅延時間td2の計測を終了する。遅延時間td2は、昇圧コンバータ制御装置110の有する図示しないメモリ等に保持される。
【0056】
遅延時間td1、td2が計測されと、ステップ410に進み、補正部134は遅延時間td1、td2に基づき制御信号P2のデューティを補正する。続いて補正部134は、ステップ411において、制御信号P1のデューティを補正する。
【0057】
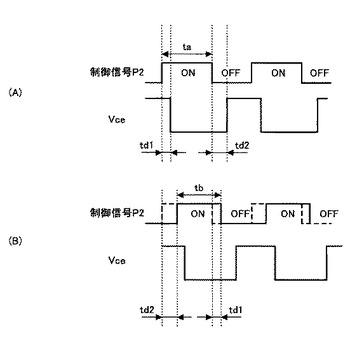
以下に図5を参照して補正部134による補正ついてさらに説明する。図5は、力行動作時の補正を説明する図であり、図5(A)は、補正前の制御信号P2と電圧Vceの波形を示し、図5(B)は補正後の制御信号P2と電圧Vceの波形を示している。
【0058】
遅延時間td1は、トランジスタ12にHレベルの制御信号P2が供給されていない状態と同様の時間であり、遅延時間td2は、Hレベルの制御信号P2がトランジスタ12に余分に供給された状態と同様の時間である。よって補正部134は、制御信号P2がHレベルとなる時間(オン時間)を遅延時間td1分長くし、遅延時間td2分短くする補正を行う。具体的には補正部134は、制御信号P2がHレベルとなるタイミングを遅延時間td2遅らせ、制御信号P2がLレベルとなるタイミングを遅延時間td1遅らせる補正を行う。
【0059】
よって、補正前の制御信号P2のオン時間(目標オン時間)をta、補正後の制御信号P2のオン時間をtbとすると、
tb=ta+td1−td2
となる。尚目標オン時間は、走行用モータ50の動作状態等により決定されるインバータ30への入力電圧目標値に基づき設定される時間である。
【0060】
制御信号P2のデューティが補正されると、補正部134は、補正後の制御信号P2に基づき制御信号P1のデューティを補正する。具体的には制御信号P1は、補正後の制御信号P2のオン時間と、オン時間の前後に設けたデッドタイムとを合わせた期間がオフとり、それ以外の期間がオンとなるように補正される。
【0061】
次に、図4へ戻って、ステップ401において動作判定部131により走行用モータ50が回生動作をしていると判定された場合を説明する。
【0062】
走行用モータ50が回生動作をしている場合、接続点Aの電圧Vceのレベルは、トランジスタ11のオン/オフにより変化する。よってこの場合、計測部133は制御信号P1が反転してから、電圧Vceのレベルが変化するまでの遅延時間を計測する。
【0063】
ステップ412において、信号出力部132から上アームのトランジスタ11をオンにするように、制御信号P1がLレベルからHレベルへ反転すると、ステップ413へ進み、計測部133は遅延時間td3の計測を開始する。ステップ414とステップ415の処理は、ステップ404とステップ405の処理と同様である。
【0064】
ステップ416において、信号出力部132からトランジスタ11をオフにするように、制御信号P1がHレベルからLレベルへ反転すると、ステップ417に進み、計測部133は遅延時間td4の計測を開始する。ステップ418とステップ419の処理は、ステップ408とステップ409の処理と同様である。
【0065】
遅延時間td3と遅延時間td4が計測されると、補正部134はステップ410で制御信号P2のデューティの補正を行い、ステップ411で制御信号P1のデューティの補正を行う。
【0066】
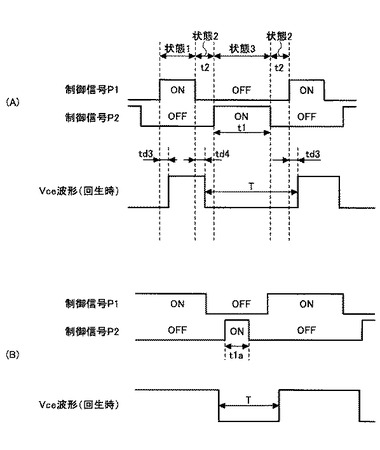
以下に図6を参照して回生動作における補正部134による補正について説明する。図6は、回生動作時の補正を説明する図であり、図6(A)は、補正前の制御信号P1、P2と電圧Vceの波形を示し、図6(B)は補正後の制御信号P1、P2と電圧Vceの波形を示している。
【0067】
図6(A)において、電圧VceをLレベルとしたい時間は、予め設定された制御信号P2のオン時間t1(理想オン時間)である。しかしながら回生動作時には、電圧Vceは、状態2の時間(デッドタイム)t2においてもLレベルとなる。さらに遅延時間td3、td4を考慮すると、図6(A)において電圧VceがLレベルとなる時間Tは、
T=t1+2×t2+(td3−td4)
となる。
【0068】
補正部134は、T=t1となるように、制御信号P2のオン時間t1を補正する。具体的には補正部134は、補正後の制御信号P2のオン時間をt1aとすると、
t1=t1a+2×t2+(td3−td4)
すなわち、
t1a=t1−2×t2−(td3−td4)
となるように、制御信号P2のオン時間を縮める補正を行う。この補正を行うことにより、補正後の時間Tは補正前の制御信号P2のオン時間t1(目標オン時間)と等しくなる。よって電圧Vceのデューティは、予め決められたデューティとなる。
【0069】
制御信号P2のデューティが補正されると、補正部134は、補正後の制御信号P2のデューティと予め決められたデッドタイムとに基づき、制御信号P1のデューティの補正を行う。制御信号P1のデューティの補正は、力行動作時の補正と同様である。
【0070】
以上に説明したように、本実施形態では、制御信号P2のデューティの補正により、電圧Vceを予め決められたオン時間と同じ時間Lレベルとすることができる。よって電圧Vceのデューティも予め決められたデューティとなる。このため走行用モータ50の動作が力行動作から回生動作へ、又は回生動作から力行動作へ切り替わる際にも昇圧コンバータ10の出力電圧の変動を抑制することができ、安定した電圧をインバータ30へ供給することができる。
【0071】
また本実施形態の昇圧コンバータ制御装置110は、信号出力部132から制御信号が反転する度に(パルス毎に)上記補正を行う。よって本実施形態によれば、リアルタイムで昇圧コンバータ10の出力電圧を制御することができ、出力電圧を常に安定させることができる。
【0072】
尚本実施形態では、昇圧コンバータ10は、第一のスイッチング素子であるトランジスタ11、第二のスイッチング素子であるトランジスタ12により構成されるものとして説明したが、これに限定されない。
【0073】
例えば昇圧コンバータ10は、第一のスイッチング素子を複数の並列接続されたトランジスタにより構成しても良い。また第二のスイッチング素子を複数の並列接続されたトランジスタにより構成しても良い。この場合、第一のスイッチング素子と第二のスイッチング素子との接続点がリアクトルL1の一端に接続されていても良い。
【0074】
また本実施形態では、第二のスイッチング素子であるトランジスタ12のエミッターコレクタ間電圧の変化に基づき、トランジスタ12の出力電圧のレベルの変化を検出しているが、これに限定されない。トランジスタ12の出力電圧のレベルの変化は、例えばトランジスタ12のエミッタ−ゲート間電圧の変化により検出しても良い。
【0075】
また本実施形態では、制御信号P1、P2が反転する毎に遅延時間td1〜td4の計測を行うものとしたが、これに限定されない。例えば計測部133は、予め設定された周期に基づき、定期的に遅延時間td1〜td4の計測を行っても良い。この場合補正部134は、計測部133が計測を行う度に御信号P1、P2のデューティの補正を行えば良い。
【0076】
また遅延時間td1〜td4は、例えば電気自動車100の製造段階で予め測定されており、メモリ等に格納されていても良い。この場合、計測部133による遅延時間の計測は不要であり、補正部134は、メモリに格納された遅延時間に基づき、制御信号P1、P2のデューティの補正を行っても良い。またこの場合メモリ等に格納される遅延時間td1〜td4は、電気自動車100の走行状態に合わせた複数パターンが格納されていることが好ましい。
【0077】
また本実施形態では、力行動作時と回生動作時の両方において、トランジスタ12のオン/オフを制御する制御信号P2のデューティを始めに補正するものとしたが、これに限定されない。例えば回生動作時には、遅延時間td3と遅延時間td4を用いて、トランジスタ11のオン/オフを制御する制御信号P1のデューティを始めに補正し、補正後の制御信号P1とデッドタイムとに基づき制御信号P2の補正を行っても良い。この場合補正部134は、補正前の制御信号P1のオン時間(目標オン時間)と、遅延時間td3と遅延時間td4との時間差(td3−td4)とを加算して制御信号P1のデューティを補正しても良い。
【0078】
また本実施形態では、動作判定部131により力行動作又は回生動作の判定を行った後に計測される制御信号を決定する構成としたが、これに限定されない。例えば計測部133は、常に遅延時間td1〜td4を計測していても良い。この場合、動作判定部131は補正を行う際に動作判定を行い、補正部134は動作判定の結果に基づき補正に使用する遅延時間を決定しても良い。
【0079】
以上、本発明を実施するための最良の形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
【産業上の利用可能性】
【0080】
本発明は、自動車製造業や自動車部品製造業等に利用可能である。
【図面の簡単な説明】
【0081】
【図1】力行動作時及び回生動作時の昇圧コンバータを説明する図である。
【図2】力行動作時及び回生動作時の昇圧コンバータの出力電圧の波形を示す図である。
【図3】昇圧コンバータ制御装置を含む電気自動車の概略構成図である。
【図4】昇圧コンバータ制御装置110の動作を説明するフローチャートである。
【図5】力行動作時の補正を説明する図である。
【図6】回生動作時の補正を説明する図である。
【図7】従来の昇圧コンバータを説明する図である。
【符号の説明】
【0082】
10 昇圧コンバータ
11、12 トランジスタ
13、14 ダイオード
20 バッテリ
30 インバータ
50 走行用モータ
100 電気自動車
110 昇圧コンバータ制御装置
120 電圧検出部
121 コンパレータ
130 演算部
131 動作判定部
132 信号出力部
133 計測部
134 補正部
【技術分野】
【0001】
本発明は、電気自動車用の昇圧コンバータ制御装置、モータ制御装置及び、これらを搭載した電気自動車に関する。
【背景技術】
【0002】
近年、エンジンと、バッテリと、バッテリの直流電力を交流電力に変換するインバータと、インバータにより変換された交流電力によって駆動される走行用モータとを有するハイブリッド自動車が普及しつつある。このハイブリッド自動車の中には、2つのトランジスタから構成され、バッテリとインバータとの間に備えられた昇圧コンバータを有するものがある。
【0003】
昇圧コンバータは、走行用モータの力行動作時にはバッテリの電力を昇圧してインバータに供給し、走行用モータの回生動作時にはインバータからの回生電力を降圧してバッテリを充電する。昇圧コンバータの出力電圧は、2つのトランジスタのオン/オフの制御により、インバータへの入力電圧目標値となるように制御される。尚インバータへの入力電圧目標値は、走行用モータの動作状態等により決定される。
【0004】
図7は、従来の昇圧コンバータを説明する図である。昇圧コンバータ10は、バッテリ20とインバータ30との間に接続されており、上アームのトランジスタ11とダイオード13、下アームのトランジスタ12とダイオード14を有する。トランジスタ11、12は、IGBT(Insulated Gate Bipolar Transistor)である。トランジスタ11のエミッタとトランジスタ12のコレクタとは接続されており、リアクトルL1の一端と接続されている。リアクトルL1の他端は、バッテリ20の正極に接続されている。
【0005】
トランジスタ11のコレクタはインバータ30の電源ラインと接続されており、トランジスタ12のエミッタはインバータ30のアースラインと接続されている。またトランジスタ12のエミッタは、バッテリ20の負極へ接続されている。インバータ20は走行用モータ50の駆動を制御する。インバータ30の電源ラインとアースラインとの間には、平滑化コンデンサC1が接続されている。
【0006】
トランジスタ11、12のゲートは、制御回路40と接続されており、トランジスタ11、12のオン/オフの切り替えを制御する制御信号が入力される。制御装回路40は、昇圧コンバータ10の出力電圧がインバータへの入力電圧目標値となるようにトランジスタ11、12のオン/オフを切り替える。
【0007】
ところで昇圧コンバータ10には、通常は上アームと下アームとの短絡防止のためのデッドタイム(トランジスタ11、12が両方オフとなる時間)が設定されおり、このデッドタイムの影響により力行動作/回生動作の切り替えの際に出力電圧が変動する。このため昇圧コンバータの出力電圧の変動を抑制するための工夫がなされている。例えば特許文献1では、トランジスタのオン/オフの切り替えを行う信号のデューティ比をデッドタイム分だけ増減させる昇圧コンバータ制御装置が記載されている。
【特許文献1】特開2004−120844号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、デッドタイムには、回路や素子の特性に起因するばらつきが存在する。このため特許文献1記載の発明のようにデューティ比をデッドタイム分だけ増減させたとしても、ばらつきによる出力電圧の変動を吸収することはできない。
【0009】
本発明はこのような課題を解決するためのものであり、力行動作/回生動作の切り替わり時にも昇圧コンバータから安定した電圧を出力することが可能な昇圧コンバータ制御装置、モータ制御装置、電気自動車を提供することを、主たる目的とする。
【課題を解決するための手段】
【0010】
本発明は、上記目的を達成するために以下の如き構成を採用した。
【0011】
本発明は、第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置であって、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから、前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する構成とした。
【0012】
また本発明の昇圧コンバータ制御装置は、前記制御信号が反転してから、前記レベルが変化するまでの時間を計測する計測手段を有する構成とした。
【0013】
また本発明の昇圧コンバータ制御装置は、前記昇圧コンバータと接続されたインバータにより駆動されるモータの動作が力行動作か、又は回生動作かを判定する判定手段を有し、
前記第一のスイッチング素子は上アームのスイッチング素子であり、前記第二のスイッチング素子は下アームのスイッチング素子であって、
前記補正手段は、
前記判定手段により前記モータの動作が回生動作と判定された場合、前記上アームのスイッチング素子のオン/オフを制御する第一の制御信号が反転してから、前記出力電圧のレベルが変化するまでの時間に基づき補正を行い、
前記判定手段により前記モータの動作が力行動作と判定された場合、前記下アームのスイッチング素子のオン/オフを制御する第二の制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき補正を行う構成とした。
【0014】
また本発明の昇圧コンバータ制御装置において、前記補正手段は、
前記第二の制御信号のデューティを前記計測手段により計測された時間に基づき補正し、
前記第一の制御信号のデューティを、前記第二の制御信号のデューティと、予め設定された前記上アームのスイッチング素子及び下アームのスイッチング素子がオフとされるオフ時間と、に基づき補正する構成とした。
【0015】
また本発明の昇圧コンバータ制御装置において、前記判定手段により前記モータの動作が回生動作と判定された場合、
前記計測手段は、
前記第一の制御信号が、前記上アームのスイッチング素子をオフする信号からオンする信号へ反転してから、前記出力電圧のレベルが変化するまでの第一の時間と、
前記第一の制御信号が、前記上アームのスイッチング素子をオンする信号からオフする信号へ反転してから、前記出力電圧のレベルが変化するまでの第二の時間と、を計測し、
前記補正手段は、
前記下アームのスイッチング素子がオンされるべき目標オン時間から、前記第一の時間と前記第二の時間との時間差と前記オフ時間とを減算して前記第二の制御信号のデューティを補正する構成とした。
【0016】
また本発明の昇圧コンバータ制御装置において、前記判定手段により前記モータの動作が力行動作と判定された場合、
前記計測手段は、
前記第二の制御信号が、前記下アームのスイッチング素子をオフする信号からオンする信号へ反転してから、前記出力電圧のレベルが変化するまでの第一の時間と、
前記第二の制御信号が、前記下アームのスイッチング素子をオンする信号からオフする信号に反転してから、前記出力電圧のレベルが変化するまでの第二の時間と、を計測し、
前記補正手段は、
前記第一の時間と前記第二の時間との時間差を、前記下アームのスイッチング素子がオンされるべき目標オン時間に加算して、前記第二の制御信号のデューティを補正する構成とした。
【0017】
本発明は、第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置と、前記昇圧コンバータの出力電圧が供給されるインバータとを有し、前記インバータから供給される電力により駆動されるモータを制御するモータ制御装置であって、
前記昇圧コンバータ制御装置は、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する構成とした。
【0018】
本発明は、第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置と、前記昇圧コンバータを介してインバータに電力を供給するバッテリと、前記インバータから供給される電力により駆動する走行用モータと、を有する電気自動車であって、
前記昇圧コンバータ制御装置は、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する構成とした。
【発明の効果】
【0019】
本発明によれば、力行動作/回生動作の切り替わり時にも昇圧コンバータから安定した電圧を出力することができる。
【発明を実施するための最良の形態】
【0020】
本発明は、昇圧コンバータを構成するトランジスタのオン/オフを切り替える信号が出力されたときから、この信号により昇圧コンバータの出力電圧が変化するまでの遅延時間を計測し、計測された遅延時間に基づき2つのトランジスタのオン/オフを切り替える信号のデューティ比を補正する。本発明では、この補正により走行用モータの動作が力行動作/回生動作に切り替わった際にも、デッドタイムによる出力電圧の変動を抑制することができる。
【0021】
以下に、本発明の実施形態の説明に先立ち、図1、図2を参照して力行動作/回生動作の切り替わりの際の昇圧コンバータの出力電圧について説明する。図1は、力行動作時及び回生動作時の昇圧コンバータを説明する図である。図2は、力行動作時及び回生動作時の昇圧コンバータの出力電圧の波形を示す図である。
【0022】
図1(A)は、力行動作時の昇圧コンバータを説明する図であり、図1(B)は、回生動作時の昇圧コンバータを説明する図である。尚図1に示す昇圧コンバータは、図7で説明した従来の昇圧コンバータ10と同様の構成であるから、以下の図1の説明では図7の説明で用いた符号と同様の符号を用いる。
【0023】
始めに力行動作時について説明する。インバータ30(図1では図示せず)により駆動される走行用モータ50(図1では図示せず)が力行動作を行っている場合、リアクトルL1には正の向きの電流(Il>0)が流れる。
【0024】
昇圧コンバータ10の上アームのトランジスタ11がオン、下アームのトランジスタ12がオフのとき(以下、状態1)、リアクトルL1を流れる電流Ilは、ダイオード13を通ってインバータ30へ流れる。このときインバータ30に供給される昇圧コンバータ10の出力電圧をVoとすると、トランジスタ11のエミッタとトランジスタ12のコレクタとの接続点Aの電圧Vceは出力電圧Voとなる。尚実際にはダイオード13の電圧降下が発生するが、昇圧コンバータ10の出力電圧と比べて十分小さい電圧であるため、以下の説明ではダイオード13の電圧降下は考慮しない。またトランジスタ11、トランジスタ12は、ゲートにハイレベル(以下、Hレベル)の信号が印加されるとオンになり、ローレベル(以下、Lレベル)の信号が印加されるオフとなる。
【0025】
次に上アームのトランジスタ11、下アームのトランジスタ12が共にオフのとき(以下、状態2)、電流Ilは状態1と同様にダイオード13を介してインバータ30へ流れる。よって接続点Aの電圧Vceは出力電圧Voのままである。尚状態2である期間が、上下アームの短絡を防止するためのデッドタイムとなる。
【0026】
続いて上アームのトランジスタ11がオフ、下アームのトランジスタ12がオンのとき(以下、状態3)、電流Ilはトランジスタ12を介して負極へ流れる。よって接続点Aの電圧Vceは0となる。
【0027】
次に回生動作時について説明する。インバータ30により駆動される走行用モータ50が回生動作を行っている場合、リアクトルL1には負の向きの電流(Il<0)が流れる。
【0028】
状態1において、電流Ilはトランジスタ11を介してリアクトルL1へ流れる。よって接続点Aの電圧Vceは出力電圧Voとなる。状態2において、電流IlはダイオードD14を通ってリアクトルL1へ流れる。よって接続点Aの電圧Vceは0である。状態3においても状態2と同様に、電流Ilはダイオード14を通ってリアクトルL1へ流れるため、接続点Aの電圧Vceは0である。
【0029】
よって力行動作時において、接続点Aの電圧Vceは、状態1、状態2のときはVo(Hレベル)であり、状態3のとき0(Lレベル)となる。また回生動作時において、接続点Aの電圧Vceは、状態1ときのみHレベルとなり、状態2、状態3のときはLレベルとなる。
【0030】
よって力行動作時と回生動作時では、電圧Vceのデューティが異なる。昇圧コンバータ10の出力電圧は、電圧Vceのデューティにより決定されるため、このデューティが変動すると昇圧コンバータ10の出力電圧も変動する。したがって、力行動作と回生動作の切り替わりの際には、電圧Vceのデューティの変動が発生し、昇圧コンバータ10の出力電圧が変動するという問題が発生する。
【0031】
また実際にトランジスタ11、12のゲートに、オン/オフを切り替える制御信号が入力されてから、実際にトランジスタ11、12のオン/オフが切り替わるまでに遅延時間が生じる。この遅延時間は、電圧Vceのデューティの変動に影響する。
【0032】
図2には制御信号P1、P2と電圧Vceの波形が示されている。図2(A)は、制御回路40から出力されるトランジスタ11、トランジスタ12のオン/オフを切り替える制御信号P1、P2を示す。図2(B)は、力行動作時における昇圧コンバータ10の接続点Aの電圧Vceを示し、図2(C)は、回生動作時における昇圧コンバータ10の接続点Aの電圧Vceを示す。
【0033】
例えば力行動作の場合、トランジスタ12に対して出力される制御信号P2がLレベルからHレベルに反転して状態3となってから、電圧VceがLレベルとなるまでに遅延時間td1が発生する。またトランジスタ12に対して出力される制御信号P2がHレベルからLレベルに反転して状態2となってから、電圧VceがHレベルとなるまでに遅延時間td2が発生する。よって電圧Vceのデューティは遅延時間td1、td2によっても変動する。
【0034】
回生動作の場合、トランジスタ11に対して出力される制御信号P1がLレベルからHレベルに反転して状態1となってから、電圧VceがHレベルとなるまでに遅延時間td3が発生する。またトランジスタ11に対して出力される制御信号P1がHレベルからLレベルに反転して状態2となってから、電圧VceがLレベルとなるまでに遅延時間td4が発生する。よって電圧Vceのデューティは遅延時間td3、td4によっても変動する。
【0035】
本発明は、上述の力行動作と回生動作との切り替えや遅延時間により生じる電圧Vceのデューティの変動を補正するものである。
【0036】
(実施形態)
以下に図面を参照して本発明の実施形態について説明する。図3は、昇圧コンバータ制御装置を含む電気自動車の概略構成図である。尚以下の本実施形態の説明において、図7で説明した回路構成と同様の構成を有するものには、図7の説明で用いた符号と同様の符号を付与する。
【0037】
電気自動車100は、バッテリの電力を用いて走行用モータ50を駆動することにより車両を駆動する自動車である。電気自動車100は、例えばハイブリット自動車等である。
【0038】
電気自動車100は、走行用モータ50を駆動するインバータ30、インバータ30と並列に接続された平滑化コンデンサC1、バッテリ20とインバータ30との間に設けられた昇圧コンバータ10、昇圧コンバータ10を制御する昇圧コンバータ制御装置110、リアクトルL1を有する。
【0039】
昇圧コンバータ10は、上アームのトランジスタ11、ダイオード13、下アームのトランジスタ12、ダイオード14を有する。本実施形態のトランジスタ11は第一のスイッチング素子であり、トランジスタ12は第二のスイッチング素子である。トランジスタ11、12はIGBTやMOSFET(metal-oxide-semiconductor field-effect transistor)等であり、昇圧コンバータ制御装置110からゲートへ入力される制御信号によりオン/オフが制御される。
【0040】
トランジスタ11、12は、インバータ30の電源ラインとアースラインとの間に直列に接続されている。トランジスタ11のコレクタは電源ラインと接続されており、トランジスタ11のエミッタはトランジスタ12のコレクタと接続されている。トランジスタ12のエミッタはアースライン及びバッテリ20の負極に接続されている。
【0041】
トランジスタ11のエミッタとトランジスタ12のコレクタとの接続点Aは、リアクトルL1の一端と接続されている。リアクトルL1の他端はバッテリ20の正極に接続されている。トランジスタ11とトランジスタ12のコレクタ−エミッタ間には、エミッタ側からコレクタ側へ電流を流すように、ダイオード13、14がそれぞれ接続されている。
【0042】
インバータ30は、昇圧コンバータ10から供給される直流電力を交流電力に変換し、走行用モータ50へ供給する。これにより走行用モータ50が回転駆動される。インバータ30の電源ラインとアースラインとの間には、平滑化コンデンサC1が接続されている。インバータ30は、電源ラインとアースラインとの間に互いに並列に配置されるU相、V相、W相の各アーム(図示せず)から構成される。各アームは、2つのスイッチング素子の直列接続から構成される。また各アームを構成するスイッチング素子のコレクタ−エミッタ間には、それぞれエミッタ側からコレクタ側に電流を流すダイオードが配置されている。
【0043】
昇圧コンバータ制御装置110は、トランジスタ11とトランジスタ12のゲートに、それぞれのオン/オフさせる制御信号P1、P2を出力する。また本実施形態の昇圧コンバータ制御装置110は、接続点Aの電圧レベルの変動に基づき制御信号P1、P2のデューティを補正する。以下に昇圧コンバータ制御装置110の詳細を説明する。
【0044】
本実施形態の昇圧コンバータ110は、電圧検出部120、演算部130を有する。
【0045】
電圧検出部120は、抵抗R1、R2、コンパレータ121、基準電圧Vrefを有し、昇圧コンバータ10の接続点Aの電圧レベル、即ちトランジスタ12のエミッタ−コレクタ間電圧の変化を検出する。抵抗R1、R2は直列に接続されており、抵抗R1の一端が接続点Aと接続され、抵抗R2の一端が接地されている。コンパレータ121の反転入力端子には、抵抗R1と抵抗R2により分圧された接続点Aの電圧Vceが入力される。コンパレータ121の非反転入力端子には基準電圧Vrefが入力される。
【0046】
コンパレータ121の出力端子は、演算部130と接続されており、コンパレータ121の出力信号は演算部130へ供給される。本実施形態のコパレータ121は、例えば接続点Aの電圧Vceが所定値より高くなったときLレベルの信号を出力し、接続点Aの電圧Vceが所定値より低くなったときHレベルを出力しても良い。
【0047】
演算部130は、CPU(Central Processing Unit)等により実現される。演算部130の有する各部の機能は、CPUにより、図示しないメモリに格納されたプログラムを読み出して実行することにより実現される。
【0048】
演算部130は、動作判定部131、信号出力部132、計測部133、補正部134を有する。動作判定部131は、電気自動車100の走行状態等に基づき、走行用モータ50が力行動作をしているか、又は回生動作をしているかを判定する。信号出力部132は、トランジスタ11、12のオン/オフを切り替える制御信号P1、P2を出力する。
【0049】
計測部133は、信号出力部132から出力される制御信号P1、P2が反転してから、電圧検出部120により接続点Aの電圧Vceのレベル変化が検出されるのまでの時間を計測する。補正部134は、計測部133により計測された計測時間に基づき、信号出力部132から出力される制御信号P1、P2のデューティを補正する。尚計測部133は、信号出力部132から制御信号P1、P2が出力される度に(パルス毎に)計測を行い、補正部134は計測部133が計測する度に補正を行っても良い。
【0050】
次に図4を参照して昇圧コンバータ制御装置110の動作を接続する。図4は、昇圧コンバータ制御装置110の動作を説明するフローチャートである。
【0051】
電気自動車100が走行を開始すると、ステップ401において、動作判定部131により走行用モータ50が力行動作をしているか、又は回生動作をしているかを判定する。
【0052】
走行用モータ50が力行動作をしている場合、接続点Aの電圧Vceのレベルは、トランジスタ12のオン/オフにより変化する。よってこの場合、計測部133は制御信号P2が反転してから、電圧Vceのレベルが変化するまでの遅延時間を計測する。
【0053】
ステップ402において、信号出力部132から下アームのトランジスタ12をオンにするHレベルの制御信号P2が出力されると、ステップ403へ進み、計測部133は遅延時間td1の計測を開始する。
【0054】
ステップ404において、電圧検出部120により接続点Aの電圧Vceのレベル変化が検出されると、ステップ405に進み、計測部133は遅延時間td1の計測を終了する。尚具体的には電圧検出部120は、接続点Aの電圧VceがHレベルからLレベルへ変化したことを検出する。ここで計測された遅延時間td1は、昇圧コンバータ制御装置110の有する図示しないメモリ等に保持される。
【0055】
次にステップ406において、信号出力部132から出力される制御信号P2が反転し、トランジスタ12をオフにするLレベルの制御信号P2が出力されると、ステップ407に進み、計測部133は遅延時間td2の計測を開始する。ステップ408において、電圧検出部120により接続点の電圧Vceのレベル変化(LレベルからHレベルへの変化)が検出されると、ステップ409に進み、計測部133は遅延時間td2の計測を終了する。遅延時間td2は、昇圧コンバータ制御装置110の有する図示しないメモリ等に保持される。
【0056】
遅延時間td1、td2が計測されと、ステップ410に進み、補正部134は遅延時間td1、td2に基づき制御信号P2のデューティを補正する。続いて補正部134は、ステップ411において、制御信号P1のデューティを補正する。
【0057】
以下に図5を参照して補正部134による補正ついてさらに説明する。図5は、力行動作時の補正を説明する図であり、図5(A)は、補正前の制御信号P2と電圧Vceの波形を示し、図5(B)は補正後の制御信号P2と電圧Vceの波形を示している。
【0058】
遅延時間td1は、トランジスタ12にHレベルの制御信号P2が供給されていない状態と同様の時間であり、遅延時間td2は、Hレベルの制御信号P2がトランジスタ12に余分に供給された状態と同様の時間である。よって補正部134は、制御信号P2がHレベルとなる時間(オン時間)を遅延時間td1分長くし、遅延時間td2分短くする補正を行う。具体的には補正部134は、制御信号P2がHレベルとなるタイミングを遅延時間td2遅らせ、制御信号P2がLレベルとなるタイミングを遅延時間td1遅らせる補正を行う。
【0059】
よって、補正前の制御信号P2のオン時間(目標オン時間)をta、補正後の制御信号P2のオン時間をtbとすると、
tb=ta+td1−td2
となる。尚目標オン時間は、走行用モータ50の動作状態等により決定されるインバータ30への入力電圧目標値に基づき設定される時間である。
【0060】
制御信号P2のデューティが補正されると、補正部134は、補正後の制御信号P2に基づき制御信号P1のデューティを補正する。具体的には制御信号P1は、補正後の制御信号P2のオン時間と、オン時間の前後に設けたデッドタイムとを合わせた期間がオフとり、それ以外の期間がオンとなるように補正される。
【0061】
次に、図4へ戻って、ステップ401において動作判定部131により走行用モータ50が回生動作をしていると判定された場合を説明する。
【0062】
走行用モータ50が回生動作をしている場合、接続点Aの電圧Vceのレベルは、トランジスタ11のオン/オフにより変化する。よってこの場合、計測部133は制御信号P1が反転してから、電圧Vceのレベルが変化するまでの遅延時間を計測する。
【0063】
ステップ412において、信号出力部132から上アームのトランジスタ11をオンにするように、制御信号P1がLレベルからHレベルへ反転すると、ステップ413へ進み、計測部133は遅延時間td3の計測を開始する。ステップ414とステップ415の処理は、ステップ404とステップ405の処理と同様である。
【0064】
ステップ416において、信号出力部132からトランジスタ11をオフにするように、制御信号P1がHレベルからLレベルへ反転すると、ステップ417に進み、計測部133は遅延時間td4の計測を開始する。ステップ418とステップ419の処理は、ステップ408とステップ409の処理と同様である。
【0065】
遅延時間td3と遅延時間td4が計測されると、補正部134はステップ410で制御信号P2のデューティの補正を行い、ステップ411で制御信号P1のデューティの補正を行う。
【0066】
以下に図6を参照して回生動作における補正部134による補正について説明する。図6は、回生動作時の補正を説明する図であり、図6(A)は、補正前の制御信号P1、P2と電圧Vceの波形を示し、図6(B)は補正後の制御信号P1、P2と電圧Vceの波形を示している。
【0067】
図6(A)において、電圧VceをLレベルとしたい時間は、予め設定された制御信号P2のオン時間t1(理想オン時間)である。しかしながら回生動作時には、電圧Vceは、状態2の時間(デッドタイム)t2においてもLレベルとなる。さらに遅延時間td3、td4を考慮すると、図6(A)において電圧VceがLレベルとなる時間Tは、
T=t1+2×t2+(td3−td4)
となる。
【0068】
補正部134は、T=t1となるように、制御信号P2のオン時間t1を補正する。具体的には補正部134は、補正後の制御信号P2のオン時間をt1aとすると、
t1=t1a+2×t2+(td3−td4)
すなわち、
t1a=t1−2×t2−(td3−td4)
となるように、制御信号P2のオン時間を縮める補正を行う。この補正を行うことにより、補正後の時間Tは補正前の制御信号P2のオン時間t1(目標オン時間)と等しくなる。よって電圧Vceのデューティは、予め決められたデューティとなる。
【0069】
制御信号P2のデューティが補正されると、補正部134は、補正後の制御信号P2のデューティと予め決められたデッドタイムとに基づき、制御信号P1のデューティの補正を行う。制御信号P1のデューティの補正は、力行動作時の補正と同様である。
【0070】
以上に説明したように、本実施形態では、制御信号P2のデューティの補正により、電圧Vceを予め決められたオン時間と同じ時間Lレベルとすることができる。よって電圧Vceのデューティも予め決められたデューティとなる。このため走行用モータ50の動作が力行動作から回生動作へ、又は回生動作から力行動作へ切り替わる際にも昇圧コンバータ10の出力電圧の変動を抑制することができ、安定した電圧をインバータ30へ供給することができる。
【0071】
また本実施形態の昇圧コンバータ制御装置110は、信号出力部132から制御信号が反転する度に(パルス毎に)上記補正を行う。よって本実施形態によれば、リアルタイムで昇圧コンバータ10の出力電圧を制御することができ、出力電圧を常に安定させることができる。
【0072】
尚本実施形態では、昇圧コンバータ10は、第一のスイッチング素子であるトランジスタ11、第二のスイッチング素子であるトランジスタ12により構成されるものとして説明したが、これに限定されない。
【0073】
例えば昇圧コンバータ10は、第一のスイッチング素子を複数の並列接続されたトランジスタにより構成しても良い。また第二のスイッチング素子を複数の並列接続されたトランジスタにより構成しても良い。この場合、第一のスイッチング素子と第二のスイッチング素子との接続点がリアクトルL1の一端に接続されていても良い。
【0074】
また本実施形態では、第二のスイッチング素子であるトランジスタ12のエミッターコレクタ間電圧の変化に基づき、トランジスタ12の出力電圧のレベルの変化を検出しているが、これに限定されない。トランジスタ12の出力電圧のレベルの変化は、例えばトランジスタ12のエミッタ−ゲート間電圧の変化により検出しても良い。
【0075】
また本実施形態では、制御信号P1、P2が反転する毎に遅延時間td1〜td4の計測を行うものとしたが、これに限定されない。例えば計測部133は、予め設定された周期に基づき、定期的に遅延時間td1〜td4の計測を行っても良い。この場合補正部134は、計測部133が計測を行う度に御信号P1、P2のデューティの補正を行えば良い。
【0076】
また遅延時間td1〜td4は、例えば電気自動車100の製造段階で予め測定されており、メモリ等に格納されていても良い。この場合、計測部133による遅延時間の計測は不要であり、補正部134は、メモリに格納された遅延時間に基づき、制御信号P1、P2のデューティの補正を行っても良い。またこの場合メモリ等に格納される遅延時間td1〜td4は、電気自動車100の走行状態に合わせた複数パターンが格納されていることが好ましい。
【0077】
また本実施形態では、力行動作時と回生動作時の両方において、トランジスタ12のオン/オフを制御する制御信号P2のデューティを始めに補正するものとしたが、これに限定されない。例えば回生動作時には、遅延時間td3と遅延時間td4を用いて、トランジスタ11のオン/オフを制御する制御信号P1のデューティを始めに補正し、補正後の制御信号P1とデッドタイムとに基づき制御信号P2の補正を行っても良い。この場合補正部134は、補正前の制御信号P1のオン時間(目標オン時間)と、遅延時間td3と遅延時間td4との時間差(td3−td4)とを加算して制御信号P1のデューティを補正しても良い。
【0078】
また本実施形態では、動作判定部131により力行動作又は回生動作の判定を行った後に計測される制御信号を決定する構成としたが、これに限定されない。例えば計測部133は、常に遅延時間td1〜td4を計測していても良い。この場合、動作判定部131は補正を行う際に動作判定を行い、補正部134は動作判定の結果に基づき補正に使用する遅延時間を決定しても良い。
【0079】
以上、本発明を実施するための最良の形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
【産業上の利用可能性】
【0080】
本発明は、自動車製造業や自動車部品製造業等に利用可能である。
【図面の簡単な説明】
【0081】
【図1】力行動作時及び回生動作時の昇圧コンバータを説明する図である。
【図2】力行動作時及び回生動作時の昇圧コンバータの出力電圧の波形を示す図である。
【図3】昇圧コンバータ制御装置を含む電気自動車の概略構成図である。
【図4】昇圧コンバータ制御装置110の動作を説明するフローチャートである。
【図5】力行動作時の補正を説明する図である。
【図6】回生動作時の補正を説明する図である。
【図7】従来の昇圧コンバータを説明する図である。
【符号の説明】
【0082】
10 昇圧コンバータ
11、12 トランジスタ
13、14 ダイオード
20 バッテリ
30 インバータ
50 走行用モータ
100 電気自動車
110 昇圧コンバータ制御装置
120 電圧検出部
121 コンパレータ
130 演算部
131 動作判定部
132 信号出力部
133 計測部
134 補正部
【特許請求の範囲】
【請求項1】
第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置であって、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから、前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する昇圧コンバータ制御装置。
【請求項2】
前記制御信号が反転してから、前記レベルが変化するまでの時間を計測する計測手段を有する昇圧コンバータ制御装置。
【請求項3】
前記昇圧コンバータと接続されたインバータにより駆動されるモータの動作が力行動作か、又は回生動作かを判定する判定手段を有し、
前記第一のスイッチング素子は上アームのスイッチング素子であり、前記第二のスイッチング素子は下アームのスイッチング素子であって、
前記補正手段は、
前記判定手段により前記モータの動作が回生動作と判定された場合、前記上アームのスイッチング素子のオン/オフを制御する第一の制御信号が反転してから、前記出力電圧のレベルが変化するまでの時間に基づき補正を行い、
前記判定手段により前記モータの動作が力行動作と判定された場合、前記下アームのスイッチング素子のオン/オフを制御する第二の制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき補正を行う請求項1又は2記載の昇圧コンバータ制御装置。
【請求項4】
前記補正手段は、
前記第二の制御信号のデューティを前記計測手段により計測された時間に基づき補正し、
前記第一の制御信号のデューティを、前記第二の制御信号のデューティと、予め設定された前記上アームのスイッチング素子及び下アームのスイッチング素子がオフとされるオフ時間と、に基づき補正する請求項3記載の昇圧コンバータ制御装置。
【請求項5】
前記判定手段により前記モータの動作が回生動作と判定された場合、
前記計測手段は、
前記第一の制御信号が、前記上アームのスイッチング素子をオフする信号からオンする信号へ反転してから、前記出力電圧のレベルが変化するまでの第一の時間と、
前記第一の制御信号が、前記上アームのスイッチング素子をオンする信号からオフする信号へ反転してから、前記出力電圧のレベルが変化するまでの第二の時間と、を計測し、
前記補正手段は、
前記下アームのスイッチング素子がオンされるべき目標オン時間から、前記第一の時間と前記第二の時間との時間差と前記オフ時間とを減算して前記第二の制御信号のデューティを補正する請求項4記載の昇圧コンバータ制御装置。
【請求項6】
前記判定手段により前記モータの動作が力行動作と判定された場合、
前記計測手段は、
前記第二の制御信号が、前記下アームのスイッチング素子をオフする信号からオンする信号へ反転してから、前記出力電圧のレベルが変化するまでの第一の時間と、
前記第二の制御信号が、前記下アームのスイッチング素子をオンする信号からオフする信号に反転してから、前記出力電圧のレベルが変化するまでの第二の時間と、を計測し、
前記補正手段は、
前記第一の時間と前記第二の時間との時間差を、前記下アームのスイッチング素子がオンされるべき目標オン時間に加算して、前記第二の制御信号のデューティを補正する請求項4又は5に記載の昇圧コンバータ制御装置。
【請求項7】
第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置と、前記昇圧コンバータの出力電圧が供給されるインバータとを有し、前記インバータから供給される電力により駆動されるモータを制御するモータ制御装置であって、
前記昇圧コンバータ制御装置は、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有するモータ制御装置。
【請求項8】
第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置と、前記昇圧コンバータを介してインバータに電力を供給するバッテリと、前記インバータから供給される電力により駆動する走行用モータと、を有する電気自動車であって、
前記昇圧コンバータ制御装置は、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する電気自動車。
【請求項1】
第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置であって、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから、前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する昇圧コンバータ制御装置。
【請求項2】
前記制御信号が反転してから、前記レベルが変化するまでの時間を計測する計測手段を有する昇圧コンバータ制御装置。
【請求項3】
前記昇圧コンバータと接続されたインバータにより駆動されるモータの動作が力行動作か、又は回生動作かを判定する判定手段を有し、
前記第一のスイッチング素子は上アームのスイッチング素子であり、前記第二のスイッチング素子は下アームのスイッチング素子であって、
前記補正手段は、
前記判定手段により前記モータの動作が回生動作と判定された場合、前記上アームのスイッチング素子のオン/オフを制御する第一の制御信号が反転してから、前記出力電圧のレベルが変化するまでの時間に基づき補正を行い、
前記判定手段により前記モータの動作が力行動作と判定された場合、前記下アームのスイッチング素子のオン/オフを制御する第二の制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき補正を行う請求項1又は2記載の昇圧コンバータ制御装置。
【請求項4】
前記補正手段は、
前記第二の制御信号のデューティを前記計測手段により計測された時間に基づき補正し、
前記第一の制御信号のデューティを、前記第二の制御信号のデューティと、予め設定された前記上アームのスイッチング素子及び下アームのスイッチング素子がオフとされるオフ時間と、に基づき補正する請求項3記載の昇圧コンバータ制御装置。
【請求項5】
前記判定手段により前記モータの動作が回生動作と判定された場合、
前記計測手段は、
前記第一の制御信号が、前記上アームのスイッチング素子をオフする信号からオンする信号へ反転してから、前記出力電圧のレベルが変化するまでの第一の時間と、
前記第一の制御信号が、前記上アームのスイッチング素子をオンする信号からオフする信号へ反転してから、前記出力電圧のレベルが変化するまでの第二の時間と、を計測し、
前記補正手段は、
前記下アームのスイッチング素子がオンされるべき目標オン時間から、前記第一の時間と前記第二の時間との時間差と前記オフ時間とを減算して前記第二の制御信号のデューティを補正する請求項4記載の昇圧コンバータ制御装置。
【請求項6】
前記判定手段により前記モータの動作が力行動作と判定された場合、
前記計測手段は、
前記第二の制御信号が、前記下アームのスイッチング素子をオフする信号からオンする信号へ反転してから、前記出力電圧のレベルが変化するまでの第一の時間と、
前記第二の制御信号が、前記下アームのスイッチング素子をオンする信号からオフする信号に反転してから、前記出力電圧のレベルが変化するまでの第二の時間と、を計測し、
前記補正手段は、
前記第一の時間と前記第二の時間との時間差を、前記下アームのスイッチング素子がオンされるべき目標オン時間に加算して、前記第二の制御信号のデューティを補正する請求項4又は5に記載の昇圧コンバータ制御装置。
【請求項7】
第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置と、前記昇圧コンバータの出力電圧が供給されるインバータとを有し、前記インバータから供給される電力により駆動されるモータを制御するモータ制御装置であって、
前記昇圧コンバータ制御装置は、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有するモータ制御装置。
【請求項8】
第一のスイッチング素子と第二のスイッチング素子を有する昇圧コンバータを制御する昇圧コンバータ制御装置と、前記昇圧コンバータを介してインバータに電力を供給するバッテリと、前記インバータから供給される電力により駆動する走行用モータと、を有する電気自動車であって、
前記昇圧コンバータ制御装置は、
前記第一のスイッチング素子又は第二のスイッチング素子のオン/オフの切り替えを制御する制御信号を出力する信号出力手段と、
前記第二のスイッチング素子の出力電圧のレベルの変化を検出する検出手段と、
前記信号出力手段により出力される制御信号が反転してから前記出力電圧のレベルが変化するまでの時間に基づき、前記制御信号のデューティを補正する補正手段と、を有する電気自動車。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−278766(P2009−278766A)
【公開日】平成21年11月26日(2009.11.26)
【国際特許分類】
【出願番号】特願2008−127322(P2008−127322)
【出願日】平成20年5月14日(2008.5.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003218)株式会社豊田自動織機 (4,162)
【Fターム(参考)】
【公開日】平成21年11月26日(2009.11.26)
【国際特許分類】
【出願日】平成20年5月14日(2008.5.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003218)株式会社豊田自動織機 (4,162)
【Fターム(参考)】
[ Back to top ]