
昇降装置及び車両
【課題】アクチュエータの駆動力を略均等にリンクに伝達し、昇降動作をスムーズに行うことができる昇降装置および当該昇降装置を備える車両を提供すること。
【解決手段】一端部34Aが基台30に軸支され、他端部34Bが載置台13に支承される第1リンク34と、一端部35Aが載置台13に軸支され、他端部35Bが基台30に支承される第2リンク35と、これら第1リンク34及び第2リンク35をX字状に交差した位置で軸支する連結軸36と、第1リンク34及び第2リンク35にそれぞれ形成された第1カム溝34C及び第2カム溝35Cの双方に沿って該カム溝内を移動するカムフォロア54と、連結軸36に支持されてカムフォロア54を当該連結軸36に対して略水平方向に進退させる駆動装置32とを備えた。
【解決手段】一端部34Aが基台30に軸支され、他端部34Bが載置台13に支承される第1リンク34と、一端部35Aが載置台13に軸支され、他端部35Bが基台30に支承される第2リンク35と、これら第1リンク34及び第2リンク35をX字状に交差した位置で軸支する連結軸36と、第1リンク34及び第2リンク35にそれぞれ形成された第1カム溝34C及び第2カム溝35Cの双方に沿って該カム溝内を移動するカムフォロア54と、連結軸36に支持されてカムフォロア54を当該連結軸36に対して略水平方向に進退させる駆動装置32とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、昇降台に載置された荷物を昇降する昇降装置及び昇降装置を備えた車両に関する。
【背景技術】
【0002】
従来、基台と、テーブルと、該基台と該テーブルとの間に介装され、外側アームと内側アームをX字状に連結してなるリンクと、電動モータと該電動モータにより回転するねじ軸とこのねじ軸に噛み合わされたナットを有するアクチュエータを備える昇降装置が知られている。この種の昇降装置では、幅のコンパクトを図るために、電動モータとねじ軸とを直列に配置し、アクチュエータを外側アームと内側アームとの連結支点若しくはその近傍を中心にして回動可能に支持したものが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−155195号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来の昇降装置では、上記したナットに支持部材を連結し、この支持部材に支持軸を介して取り付けられたガイド部材を案内するガイド溝を外側アームに形成するとともに、上記支持軸と内側アームとを中間アームで連結する構成としていたため、アクチュエータの駆動力は、中間アームを介して、一方のアームに偏って伝達されることとなり、スムーズな昇降動作の実現が難しかった。
【0005】
本発明は、上述した事情に鑑みてなされたものであり、アクチュエータの駆動力を略均等にリンクに伝達し、昇降動作をスムーズに行うことができる昇降装置および当該昇降装置を備える車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述課題を解決するため、本発明は、基台と、この基台に対して昇降する昇降台とを備える昇降装置において、一端が前記基台に軸支され、他端が前記昇降台に支承される第1リンクと、一端が前記昇降台に軸支され、他端が前記基台に支承される第2リンクと、これら第1リンク及び第2リンクをX字状に交差した位置で軸支する軸支部材と、前記第1リンク及び第2リンクにそれぞれ形成された第1カム溝及び第2カム溝の双方に沿って該カム溝内を移動するカムフォロアと、前記軸支部材に支持されて前記カムフォロアを当該軸支部材に対して略水平方向に進退させるアクチュエータとを備えたことを特徴とする。
【0007】
この構成によれば、アクチュエータがカムフォロアを軸支部材に対して略水平方向に進退させるため、このアクチュエータの駆動力を、カムフォロアを介して、第1リンク及び第2リンクに均等に伝達することができる。このため、第1リンク及び第2リンクは、上記駆動力を受けてスムーズに動作することにより、昇降台をスムーズに昇降させることができる。
【0008】
この構成において、前記第1カム溝及び第2カム溝は、前記軸支部材と前記カムフォロアとの距離の変化量と、前記昇降台の昇降量との比が略一定となる形状にそれぞれ形成されていても良い。この構成によれば、昇降台を所定の昇降量に制御するあたり、上記した比から算出される変化量だけアクチュエータを駆動すれば、所定の昇降量に自動的に制御することができる。このため、昇降台の昇降動作を素早くかつ正確に実行することができる。
【0009】
また、前記第1リンク及び前記第2リンクの他端間には、前記昇降台に沿って配置され、前記第1リンクの他端と前記第2リンクの他端とを連結し、当該第1リンクの他端と第2リンクの他方とを近接する方向に付勢する弾性部材を備えても良い。この構成によれば、アクチュエータを上昇側に動作させた場合、第1リンク及び第2リンクには、アクチュエータの駆動力に加えて弾性部材の付勢力が作用するため、昇降台上にワークを載置した状態であっても、当該昇降台をよりスムーズに上昇させることができる。
【0010】
また、上記したいずれかの昇降装置を備える車両であって、前記昇降台上にワークを搭載してステーション間を走行するとともに、一のステーションに停止した際に、当該ステーションで決められた高さ位置に前記ワークを昇降させるように、前記駆動装置の動作を制御する高さ制御手段を備えても良い。この構成によれば、一のステーションでは、同一の高さ位置への作業を行えばよく、作業性の効率の向上を図ることができる。
【0011】
また、前記高さ制御手段は、ステーションごとに前記ワークの作業対象箇所の高さを略一定となるように前記駆動装置の動作を制御しても良い。この構成によれば、各ステーションにおける作業位置が略同一となるため、このステーションでは、同じ高さ位置に対して所定の作業をすればよい。このため、各ステーションに配置される機器を簡単な機器(例えば、汎用機)で共用することができるため、生産ラインの簡素な構成で構築することができる。
【発明の効果】
【0012】
本発明によれば、アクチュエータがカムフォロアを軸支部材に対して略水平方向に進退させるため、このアクチュエータの駆動力を、カムフォロアを介して、第1リンク及び第2リンクに均等に伝達することができる。このため、第1リンク及び第2リンクは、上記駆動力を受けてスムーズに動作することにより、昇降台をスムーズに昇降させることができる。
また、本発明によれば、昇降台を所定の昇降量に制御するあたり、軸支部材とカムフォロアとの距離の変化量と、昇降台の昇降量との比から算出される変化量だけアクチュエータを駆動すれば、所定の昇降量に自動的に制御することができる。このため、昇降台の昇降動作を素早くかつ正確に実行することができる。
また、本発明によれば、アクチュエータを上昇側に動作させた場合、第1リンク及び第2リンクには、アクチュエータの駆動力に加えて弾性部材の付勢力が作用するため、昇降台上にワークを載置した状態であっても、当該昇降台をよりスムーズに上昇させることができる。
また、一のステーションに停止した際に、当該ステーションで決められた高さ位置にワークを昇降させるように、駆動装置の動作を制御する高さ制御手段を備えるため、一のステーションでは、同一の高さ位置への作業を行えばよく、作業性の効率の向上を図ることができる。
また、高さ制御手段は、ステーションごとにワークの作業対象箇所の高さを略一定となるように駆動装置の動作を制御するため、各ステーションにおける作業位置が略同一となり、このステーションでは、同じ高さ位置に対して所定の作業をすればよい。このため、各ステーションに配置される機器を簡単な機器(例えば、汎用機)で共用することができるため、生産ラインの簡素な構成で構築することができる。
【図面の簡単な説明】
【0013】
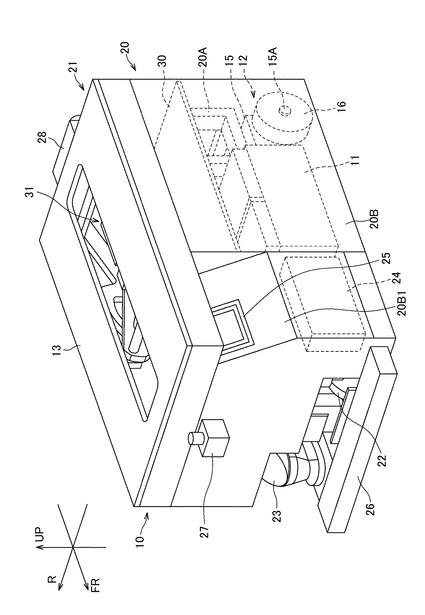
【図1】本実施形態に係る車両の適用例である搬送車の一部省略側面図である。
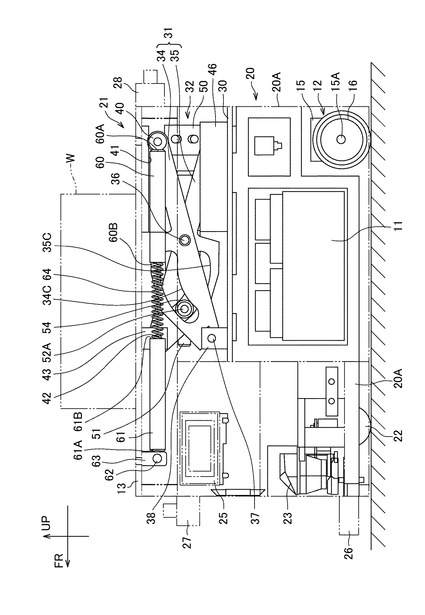
【図2】搬送車の内部概略構成を示す側面図である。
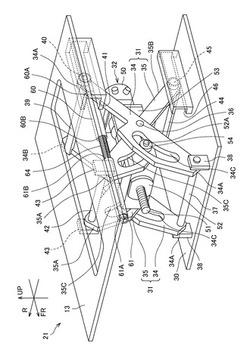
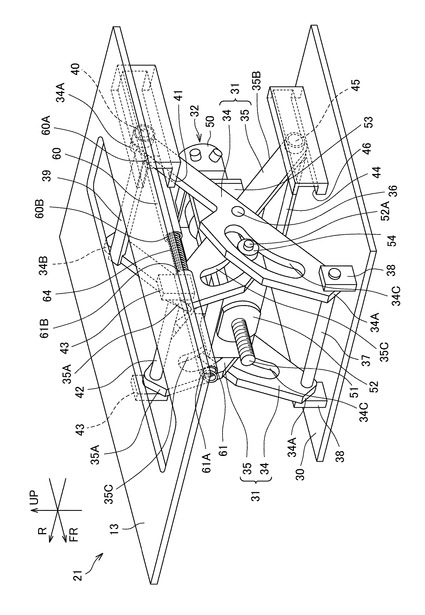
【図3】昇降装置の斜視図である。
【図4】ボールねじストロークとリフタストロークとの関係を示すグラフである。
【図5】昇降台が昇降した状態を示す側面図である。
【図6】搬送車が走行するルートを示す一部省略平面図である。
【図7】A〜Cは、搬送車が昇降台の高さを変更して走行する様子を示す側面図である。
【発明を実施するための形態】
【0014】
以下、本発明の一実施形態を添付した図面を参照して説明する。以下の説明中、前後左右及び上下といった方向の記載は車体に対してのものとする。また、図中矢印FRは車体前方を、矢印Rは車体右方を、矢印UPは車体上方をそれぞれ示している。
図1は、本実施形態に係る車両の適用例である搬送車10の一部省略斜視図であり、図2は、搬送車10の内部構造を示す一部省略側面図である。
搬送車10は、バッテリ11を電源として駆動する駆動ユニット12からの駆動力で所望の経路を走行可能な電動車両であり、例えば、自動車の生産ラインにて、自動車のエンジンやギアボックス等の部品(ワーク)を昇降可能な載置台(昇降台)13に積載し、工場内の所望の位置へと搬送するAGV(Automated Guided Vehicle)である。なお、本実施形態では、載置台13を備える車両の例示として電動で走行する搬送車10を挙げて説明するが、昇降可能な載置台を備える車両であれば、エンジン等の他の駆動手段によって走行する車両に適用可能である。
【0015】
搬送車10は、図1に示すように、車両本体20と、この車両本体20上に設けられて載置台13を昇降する昇降装置21とを備えて構成されている。車両本体20は、車長方向に延びて略箱型に形成されたフレーム20Aと、このフレーム20Aの周囲を覆うボディ20Bとを備え、フレーム20Aの前部には、四方に旋回自在なキャスタ22が配置され、後部には上記した駆動ユニット12が配置されている。この駆動ユニット12は、独立に駆動されて回転速度の調整が可能な左右一対の走行用モータ15と、各走行用モータ15の回転軸に15Aに直接連結されている駆動輪16と、回転軸15A周りの回転数(回転角度)を計測するロータリエンコーダ(不図示)と、走行用モータ15に電力を供給するバッテリ11とを備えて構成される。搬送車10は、左右一対の走行用モータ15を同一の回転数で駆動することにより、直進走行し、左右の走行用モータ15の回転数を異ならせることで、回転数の遅い走行用モータ15側に操舵することができる。また、バッテリ11は、例えば、搬送車10が待機や作業のために所定の作業ステーション(後述する)に停車された際、当該作業ステーションに設置された外部電源(不図示)によって充電される。搬送車10と外部電源とは、例えば、磁力で着脱可能な雄雌一対のコネクタによって、容易に電気的な接続が可能である。
【0016】
車両本体20の前部には、フレーム20Aの下部に取り付けられて搬送車10が走行すべき経路を検知するセンサ23と、このセンサ23からの信号等に基づいて駆動ユニット12の走行制御を行うとともに、昇降装置21の昇降制御を行う制御部24とが配置されている。また、車両本体20のボディ20Bは、このボディ20Bの左前部に、上方に向かうに連れて車幅中央側に傾斜した傾斜面20B1を備え、この傾斜面20B1には制御部24に対して各種操作を行うための操作スイッチが配置された操作パネル25が設けられている。
また、車両本体20の前方下部には、この車両本体20の前面から突出して車幅方向に延びるバンパースイッチ26が設けられ、このバンパースイッチ26の上方には、車両本体20の前面に取り付けられた非常停止スイッチ27が設けられている。バンパースイッチ26は、このバンパースイッチ26に強い衝撃を検出した際に制御部24に出力し、この制御部24の制御下、搬送車10の動作を停止させるものである。また、符号28は、昇降装置21を手動で操作する際に使用されるスイッチボックスである。
【0017】
次に、昇降装置21について説明する。
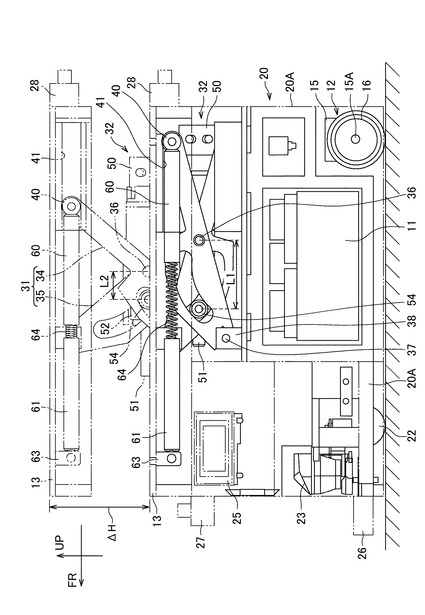
昇降装置21は、図2に示すように、載置台13に載せられたワークWを、平行状態を保った状態で上下方向に移動するものであり、車両本体20のフレーム20A上に搭載された基台30と、この基台30よりも大きく、車両本体20と略同じ大きさに形成された載置台13と、これら基台30と載置台13との間に介装された左右一対のリンク機構31,31と、このリンク機構31,31を上下に伸縮させるための駆動装置(アクチュエータ)32とを備える。
リンク機構31は、図3に示すように、それぞれ第1リンク34とこの第1リンク34の内側に配置された第2リンク35とを備え、これら第1リンク34及び第2リンク35は、X字状に交差した各リンク34、35の略中間位置で連結軸(軸支部材)36により回転自在に連結されている。第1リンク34,34の一端部34A,34A同士は連結軸37で連結され、この連結軸37の両端部は、それぞれ基台30から上方に延びる固定片38,38に回転自在に軸支されている。また、第1リンク34,34の他端部34B,34B同士は連結棒39で連結されるとともに、当該他端部34B,34Bには転動ローラ40,40が取り付けられ、この転動ローラ40,40は、それぞれ載置台13の下面に取り付けられたレール41,41に沿って転動可能に支持されている。これにより、第1リンク34,34の他端部34B,34Bは、載置台13の下面に沿って一体でスライド移動可能に支持されている。この図3では、右側(図中奥側)の第1リンク34の転動ローラ40及び、当該転動ローラ40が転動するレール41の記載を省略している。
また、第1リンク34には、一端部34A側が他端部34B側よりも幅広形状に上方に延びて形成され、この部分に駆動装置32によって進退駆動されるカムフォロアが案内される第1カム溝34Cが形成されている。
【0018】
一方、第2リンク35,35の一端部35A,35A同士は、連結軸42で連結され、この連結軸42の両端部は、それぞれ載置台13の下面から下方に延びる固定片43,43に回転自在に軸支されている。固定片43,43は、それぞれ上記した固定片38,38の略上方に形成されている。また、第2リンク35,35の他端部35B,35B同士は連結棒44で連結されるとともに、当該他端部35B,35Bには転動ローラ45,45が取り付けられ、この転動ローラ45,45は、それぞれ基台30の上面に取り付けられたレール46,46に沿って転動可能に支持されている。これにより、第2リンク35,35の他端部35B,35Bは、基台30の上面に沿って一体でスライド移動可能に支持されている。なお、この図3では、右側(図中奥側)の第2リンク35の転動ローラ45及び、当該転動ローラ45が転動するレール46の記載を省略している。
また、第2リンク35には、一端部35A側が他端部35B側よりも幅広形状に下方に延びて形成され、この部分に上記カムフォロアが案内される第2カム溝35Cが形成されている。この第2カム溝35Cは、第1カム溝34Cと対称形状に形成されて当該第1カム溝34Cと部分的に重なるように配置される。
【0019】
駆動装置32は、電動モータ50と、この電動モータ50により回転するねじ軸51と、このねじ軸51に噛み合わされたヘッド部52とを備える。電動モータ50は、板材を略コ字状に形成したブラケット53に固定され、このブラケット53が上記した連結軸36,36に取り付けられている。また、ヘッド部52はボールねじを内蔵し、ねじ軸51の回転により進退するように構成され、このヘッド部52の両側面には、それぞれ軸部52A,52Aが突出し、これら軸部52A,52Aにはカムフォロア54,54が回転自在に取り付けられている。このカムフォロア54,54は、上記した第1リンク34及び第2リンク35にそれぞれ形成された第1カム溝34C及び第2カム溝35Cの双方に沿って当該カム溝内を移動するように配置される。
【0020】
本実施形態では、カムフォロア54,54は、図2に示すように、対称形状に形成された第1カム溝34C及び第2カム溝35C内であって、上記連結軸36と略同じ高さ位置に配置されている。この状態で、駆動装置32の電動モータ50を上昇側に駆動すると、ねじ軸51が回転してヘッド部52が連結軸36に接近する方向へ相対移動する。ヘッド部52が連結軸36に接近する方向へ移動すると、このヘッド部52に連結されたカムフォロア54,54が第1カム溝34C及び第2カム溝35C内を当該連結軸36に対して水平方向に進行する。このため、図3に示すように、第1リンク34及び第2リンク35の各他端部34B,35Bに設けられている転動ローラ40,45がそれぞれレール41,46内をスライド移動することにより、第1リンク34及び第2リンク35は、図4に想像線で示すように、それぞれ起立する方向へ傾動し、両リンク機構31,31が上方へ伸長し、これにより載置台13が基台30に対して平行に上昇する。載置台13の上昇状態は、電動モータ50がその内蔵ブレーキ(例えば電磁式ブレーキ)により回転不能にロックされることにより維持される。
この場合、第1カム溝34C及び第2カム溝35Cは互いに対称形状に形成されるとともに、駆動装置32がカムフォロア54,54を連結軸36に対して水平方向に移動させるため、駆動装置32(電動モータ50)の駆動力を、カムフォロア54,54を介して、第1リンク34,34及び第2リンク35,35に対して均等に伝達することができる。このため、第1リンク34,34及び第2リンク35,35は、上記駆動力を受けてスムーズに起立する方向へ傾動することにより、載置台13をスムーズな動作で上昇させることができる。
【0021】
これに対して、電動モータ50の内蔵ブレーキを解放するとともに該電動モータ50を逆回転方向へ起動することにより載置台13を下降させることができる。この載置台13の下降時には、ヘッド部52が連結軸36から離間する方向へ相対移動する。すると、ヘッド部52に連結されたカムフォロア54,54が第1カム溝34C及び第2カム溝35C内を当該連結軸36に対して水平方向に進行する。このため、図3に示すように、第1リンク34及び第2リンク35の各他端部34B,35Bに設けられている転動ローラ40,45がそれぞれレール41,46内をスライド移動することにより、第1リンク34及び第2リンク35は、図4に示すように、それぞれ倒伏する方向へ傾動し、両リンク機構31,31が下方へ収縮し、これにより載置台13が基台30に対して平行に下降する。
この場合でも、電動モータ50の駆動力は、カムフォロア54,54を介して、第1リンク34,34及び第2リンク35,35に対して均等に伝達することができる。このため、第1リンク34,34及び第2リンク35,35は、上記駆動力を受けてスムーズに倒伏する方向へ傾動することにより、載置台13をスムーズな動作で下降させることができる。
【0022】
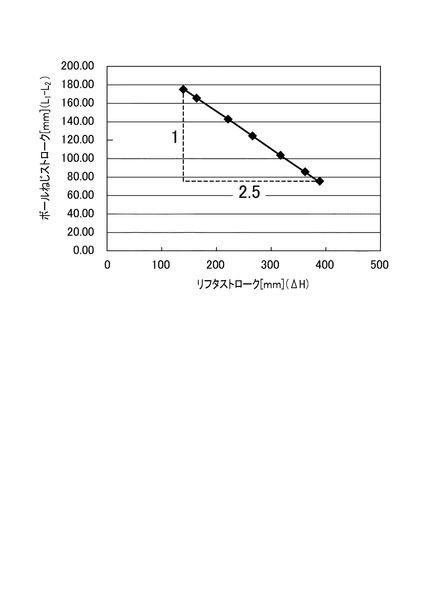
本実施形態では、第1カム溝34Cは上方に膨らんだ円弧状に形成され、第2カム溝35Cは下方に膨らんだ円弧状に形成されて、両カム溝は第1リンク及び第2リンクをX字状に連結軸36で連結した状態で対称となっている。また、第1カム溝34C及び第2カム溝35Cは、図4に示すように、これらカム溝内に位置するカムフォロア54と連結軸36との距離の変化量L1−L2と載置台13の昇降量ΔHとの比が略一定となる形状に形成されている。
発明者達の実験によれば、図5に示すように、電動モータ50のボールねじ(ねじ軸51)ストロークとリフタストロークとの比が1:2.5となるように、第1カム溝34C及び第2カム溝35Cが形成されている。なお、この図5において、ボールねじストロークは、カムフォロア54と連結軸36との距離の変化量L1−L2に相当し、リフタストロークは載置台13の昇降量ΔHに相当する。
この構成によれば、第1カム溝34C及び第2カム溝35Cは、カムフォロア54と連結軸36との距離の変化量L1−L2と、載置台13の昇降量ΔHとの比が略一定となるように形成されているため、載置台13を所定の昇降量に制御するあたり、上記比から算出されるボールねじストローク分だけ電動モータ50を駆動すれば、所定の昇降量に自動的に制御することができる。このため、載置台13の昇降動作を素早くかつ正確に実行することができる。
【0023】
また、本構成では、第1リンク34及び第2リンク35の各他端部34B,35B間には、当該他端部34B,35Bを近接させる方向に付勢されたばね部材(弾性体)64が設けられている。具体的には、図2に示すように、第1リンク34の他端部34Bには、第1パイプ60の他端60Aが上記転動ローラ40の回転軸に回動自在に固定されている。この第1パイプ60は、転動ローラ40とともにレール41内を摺動し、第1パイプ60の一端60Bにばね部材64の他端が連結されている。
一方、載置台13の前方には、第2パイプ61が配置され、この第2パイプ61の一端61Aは、載置台13の下面から下方に延びる固定片63に連結軸62を介して連結されている。第2パイプ61の他端61Bは、第2リンク35の他端部35Bが連結される固定片43に固定されるとともに、上記ばね部材64の一端が連結されている。これにより、ばね部材64の両端が一対のパイプ60,61によって支持されるため、このばね部材64の座屈が防止される。
この構成によれば、第1リンク34及び第2リンク35の各他端部34B,35B間には、当該他端部34B,35Bを近接させる方向に付勢されたばね部材64が設けられているため、電動モータ50を上昇側に駆動させた場合、第1リンク34及び第2リンク35には、電動モータ50の駆動力に加えてばね部材64の付勢力が作用するため、載置台13上にワークWを載置した状態であっても、当該載置台13をよりスムーズに上昇させることができる。
【0024】
次に、載置台13を備える搬送車10の動作について説明する。
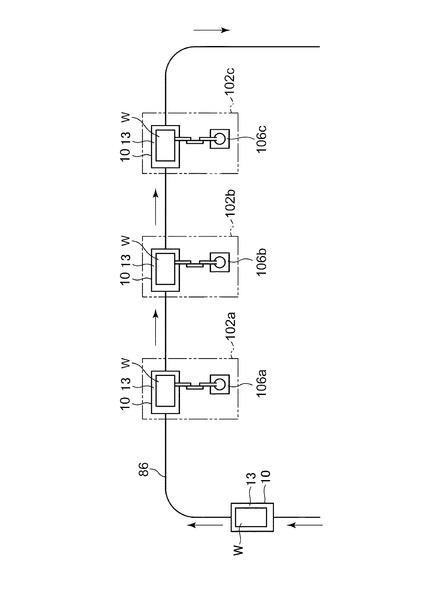
図6は、搬送車10が走行する搬送経路を示す一部省略平面図である。本実施形態にかかる搬送車10は、例えば、自動車の生産工場内の所定の搬送経路を走行するものである。この搬送経路には、複数の作業ステーション102a〜102cが設けられ、各作業ステーション102a〜102cで、載置台13上のエンジンやギアボックス等のワークWに対して部品の組み付け作業が行われる。
搬送経路は、各作業ステーション102a〜102c間をそれぞれ工場内に敷設された磁気テープ86によって接続することにより形成され、搬送車10は、この磁気テープ86に案内されて当該搬送経路上を走行する。
各作業ステーション102a〜102cには、作業ロボット106a〜106cが配置され、搬送車10で搬送されたワークWに所望の部品(図示せず)を組み付ける作業を行う。搬送車10の制御部(高さ制御手段)24は、搬送されるワークWの種類に応じて各作業ステーション102a〜102cで決められた高さ位置にワークWを昇降するために、駆動装置32を制御する。本構成では、上述のように、電動モータ50のねじ軸51のストロークと載置台13の昇降量との比が略一定となっているため、一の作業ステーション102aに停止した際に、当該作業ステーション102aにおけるワークWの高さ位置に正確に当該ワークWを昇降させることができる。このため、一の作業ステーション102aでは、作業ロボット106aは同一の高さ位置へ作業を行えばよく、作業性の効率の向上を図ることができる。
【0025】
また、本実施形態では、図7に示すように、制御部24は、作業ステーション102a〜102cごとにワークWの作業対象箇所の高さ位置Hが略一定となるように駆動装置32を制御している。制御部24には、予め、各作業ステーションで作業されるワークの作業対象箇所の高さ位置が記憶されており、この作業対象箇所の高さを所定の高さ位置Hとするように電動モータ50の動作を制御する。
具体的には、図7Aに示すように、1番目の作業ステーション102aでは、例えば、ワークWの上部に設けられた作業対象箇所80a,80bに対して作業を行うため、制御部24は、作業対象箇所80a,80bが高さ位置Hとなるように電動モータ50を制御する。この1番目の作業ステーション102aでは、作業ロボットが作業対象箇所80a,80bに対して所定の部品の組み付け作業を行う。
続いて、搬送車10は、2番目の作業ステーション102bに向けて走行し、この走行途中で載置台13を上昇させる。この場合、図7Bに示すように、制御部24は、2番目の作業ステーション102bでのワークWの作業対象箇所82a,82bの高さ位置が上記した高さHとなるように電動モータ50を制御する。そして、この2番目の作業ステーション102bでは、1番目の作業ステーション102aと同様に、作業ロボットが作業対象箇所82a,82bに対して所定の部品の組み付け作業を行う。
続いて、搬送車10は、3番目の作業ステーション102cに向けて走行し、この走行途中で載置台13を下降させる。この場合、図7Cに示すように、制御部24は、3番目の作業ステーション102cでのワークWの作業対象箇所81a,81bの高さ位置が上記した高さHとなるように電動モータ50を制御する。そして、この3番目の作業ステーション102cでは、1番目、2番目の作業ステーション102a,102bと同様に、作業ロボットが作業対象箇所81a,81bに対して所定の部品の組み付け作業を行う。
【0026】
この構成では、各作業ステーション102a〜102cごとに、ワークWの作業対象箇所の高さ位置Hを略一定となるように電動モータ50が制御されるため、各作業ステーションにおいて、作業ロボットは同じ高さ位置に対して所定の作業をすればよい。このため、作業ロボットとして簡単な機器(例えば、汎用機)を使用することができるため、生産ラインの簡素な構成で構築することができる。さらに、各ステーションでの作業性を格段に向上させることができる。
【0027】
以上、説明したように、本実施形態によれば、基台30と、この基台30に対して昇降する載置台13とを備える昇降装置21において、一端部34Aが基台30に軸支され、他端部34Bが載置台13に支承される第1リンク34と、一端部35Aが載置台13に軸支され、他端部35Bが基台30に支承される第2リンク35と、これら第1リンク34及び第2リンク35をX字状に交差した位置で軸支する連結軸36と、第1リンク34及び第2リンク35にそれぞれ形成された第1カム溝34C及び第2カム溝35Cの双方に沿って該カム溝内を移動するカムフォロア54と、連結軸36に支持されてカムフォロア54を当該連結軸36に対して略水平方向に進退させる駆動装置32とを備えたため、駆動装置32の駆動力を、カムフォロア54を介して、第1リンク34及び第2リンク35に対して均等に伝達することができる。このため、第1リンク34及び第2リンク35は、上記駆動力を受けてスムーズに起立する方向へ傾動することにより、載置台13をスムーズな動作で上昇させることができる。
【0028】
また、本実施形態によれば、第1カム溝34C及び第2カム溝35Cは、連結軸36とカムフォロア54との距離の変化量L1−L2と、載置台13の昇降量ΔHとの比が略一定となる形状にそれぞれ形成されているため、載置台13を所定の昇降量に制御するあたり、上記比から算出されるボールねじストローク分だけ電動モータ50を駆動すれば、所定の昇降量に自動的に制御することができる。このため、載置台13の昇降動作を素早くかつ正確に実行することができる。
【0029】
また、本実施形態によれば、第1リンク34及び第2リンク35の他端部34B,35B間には、載置台13に下面に沿って配置され、第1リンク34の他端部34Bと第2リンク35の他端部35Bとを連結し、当該第1リンク34の他端部34Bと第2リンク35の他端部35Bとを近接する方向に付勢するばね部材を備えるため、電動モータ50を上昇側に駆動させた場合、第1リンク34及び第2リンク35には、電動モータ50の駆動力に加えてばね部材64の付勢力が作用するため、載置台13上にワークWを載置した状態であっても、当該載置台13をよりスムーズに上昇させることができる。
【0030】
また、本実施形態によれば、載置台13上にワークWを搭載して作業ステーション102a〜102c間を走行するとともに、一のステーションに停止した際に、制御部24は、当該ステーションで決められた高さ位置にワークWを昇降させるように、駆動装置32の電動モータ50の動作を制御するため、一の作業ステーションでは、作業ロボットは同一の高さ位置への作業を行えばよく、作業性の効率の向上を図ることができる。
【0031】
また、本実施形態によれば、制御部24は、ステーションごとにワークWの作業対象箇所の高さ位置を略一定となるように駆動装置32の電動モータ50の動作を制御するため、各作業ステーションにおいて、作業ロボットは同じ高さ位置に対して所定の作業をすればよい。このため、作業ロボットとして簡単な機器(例えば、汎用機)を使用することができるため、生産ラインの簡素な構成で構築することができる。さらに、各ステーションでの作業性を格段に向上させることができる。
【0032】
なお、本発明は、上記実施形態に限らず、本発明の要旨を逸脱することなく、種々の構成を採り得ることは勿論である。例えば、本実施形態の搬送車10は、駆動ユニット12は、走行用モータ15を備える構成としているが、エンジン等の内燃機関やぜんまい駆動など他の駆動源を用いることができるのは勿論である。また、本実施形態では、走行用モータ15に電力を供給する電力供給部としてバッテリ11を備える構成としているが、例えば、床面等に電力架線を設け、この電力架線を介して走行用モータに電力を供給する構成としても良い。また、バッテリ11を外部電源のみで充電するのではなく、例えば、搬送車にソーラーパネルを設け、このソーラーパネルと外部電源とを併用する構成としても良い。
【0033】
また、本実施形態では、昇降装置21の駆動装置32として電動モータ50とねじ軸51とヘッド部52とを備える構成としたが、例えば、油圧により伸縮する油圧シリンダを用いることができるのは勿論である。
【符号の説明】
【0034】
10 搬送車(車両)
12 駆動ユニット
13 載置台(昇降台)
20 車両本体
20A フレーム
21 昇降装置
24 制御部(高さ制御手段)
30 基台
31 リンク機構
32 駆動装置(アクチュエータ)
34 第1リンク
34A 一端部
34B 他端部
34C 第1カム溝
35 第2リンク
35A 一端部
35B 他端部
35C 第2カム溝
36 連結軸(軸支部材)
50 電動モータ
51 ねじ軸
52 ヘッド部
54 カムフォロア
64 ばね部材(弾性部材)
80a、80b、81a、81b、82a、82b 作業対象箇所
102a〜102c 作業ステーション
W ワーク
【技術分野】
【0001】
本発明は、昇降台に載置された荷物を昇降する昇降装置及び昇降装置を備えた車両に関する。
【背景技術】
【0002】
従来、基台と、テーブルと、該基台と該テーブルとの間に介装され、外側アームと内側アームをX字状に連結してなるリンクと、電動モータと該電動モータにより回転するねじ軸とこのねじ軸に噛み合わされたナットを有するアクチュエータを備える昇降装置が知られている。この種の昇降装置では、幅のコンパクトを図るために、電動モータとねじ軸とを直列に配置し、アクチュエータを外側アームと内側アームとの連結支点若しくはその近傍を中心にして回動可能に支持したものが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−155195号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来の昇降装置では、上記したナットに支持部材を連結し、この支持部材に支持軸を介して取り付けられたガイド部材を案内するガイド溝を外側アームに形成するとともに、上記支持軸と内側アームとを中間アームで連結する構成としていたため、アクチュエータの駆動力は、中間アームを介して、一方のアームに偏って伝達されることとなり、スムーズな昇降動作の実現が難しかった。
【0005】
本発明は、上述した事情に鑑みてなされたものであり、アクチュエータの駆動力を略均等にリンクに伝達し、昇降動作をスムーズに行うことができる昇降装置および当該昇降装置を備える車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述課題を解決するため、本発明は、基台と、この基台に対して昇降する昇降台とを備える昇降装置において、一端が前記基台に軸支され、他端が前記昇降台に支承される第1リンクと、一端が前記昇降台に軸支され、他端が前記基台に支承される第2リンクと、これら第1リンク及び第2リンクをX字状に交差した位置で軸支する軸支部材と、前記第1リンク及び第2リンクにそれぞれ形成された第1カム溝及び第2カム溝の双方に沿って該カム溝内を移動するカムフォロアと、前記軸支部材に支持されて前記カムフォロアを当該軸支部材に対して略水平方向に進退させるアクチュエータとを備えたことを特徴とする。
【0007】
この構成によれば、アクチュエータがカムフォロアを軸支部材に対して略水平方向に進退させるため、このアクチュエータの駆動力を、カムフォロアを介して、第1リンク及び第2リンクに均等に伝達することができる。このため、第1リンク及び第2リンクは、上記駆動力を受けてスムーズに動作することにより、昇降台をスムーズに昇降させることができる。
【0008】
この構成において、前記第1カム溝及び第2カム溝は、前記軸支部材と前記カムフォロアとの距離の変化量と、前記昇降台の昇降量との比が略一定となる形状にそれぞれ形成されていても良い。この構成によれば、昇降台を所定の昇降量に制御するあたり、上記した比から算出される変化量だけアクチュエータを駆動すれば、所定の昇降量に自動的に制御することができる。このため、昇降台の昇降動作を素早くかつ正確に実行することができる。
【0009】
また、前記第1リンク及び前記第2リンクの他端間には、前記昇降台に沿って配置され、前記第1リンクの他端と前記第2リンクの他端とを連結し、当該第1リンクの他端と第2リンクの他方とを近接する方向に付勢する弾性部材を備えても良い。この構成によれば、アクチュエータを上昇側に動作させた場合、第1リンク及び第2リンクには、アクチュエータの駆動力に加えて弾性部材の付勢力が作用するため、昇降台上にワークを載置した状態であっても、当該昇降台をよりスムーズに上昇させることができる。
【0010】
また、上記したいずれかの昇降装置を備える車両であって、前記昇降台上にワークを搭載してステーション間を走行するとともに、一のステーションに停止した際に、当該ステーションで決められた高さ位置に前記ワークを昇降させるように、前記駆動装置の動作を制御する高さ制御手段を備えても良い。この構成によれば、一のステーションでは、同一の高さ位置への作業を行えばよく、作業性の効率の向上を図ることができる。
【0011】
また、前記高さ制御手段は、ステーションごとに前記ワークの作業対象箇所の高さを略一定となるように前記駆動装置の動作を制御しても良い。この構成によれば、各ステーションにおける作業位置が略同一となるため、このステーションでは、同じ高さ位置に対して所定の作業をすればよい。このため、各ステーションに配置される機器を簡単な機器(例えば、汎用機)で共用することができるため、生産ラインの簡素な構成で構築することができる。
【発明の効果】
【0012】
本発明によれば、アクチュエータがカムフォロアを軸支部材に対して略水平方向に進退させるため、このアクチュエータの駆動力を、カムフォロアを介して、第1リンク及び第2リンクに均等に伝達することができる。このため、第1リンク及び第2リンクは、上記駆動力を受けてスムーズに動作することにより、昇降台をスムーズに昇降させることができる。
また、本発明によれば、昇降台を所定の昇降量に制御するあたり、軸支部材とカムフォロアとの距離の変化量と、昇降台の昇降量との比から算出される変化量だけアクチュエータを駆動すれば、所定の昇降量に自動的に制御することができる。このため、昇降台の昇降動作を素早くかつ正確に実行することができる。
また、本発明によれば、アクチュエータを上昇側に動作させた場合、第1リンク及び第2リンクには、アクチュエータの駆動力に加えて弾性部材の付勢力が作用するため、昇降台上にワークを載置した状態であっても、当該昇降台をよりスムーズに上昇させることができる。
また、一のステーションに停止した際に、当該ステーションで決められた高さ位置にワークを昇降させるように、駆動装置の動作を制御する高さ制御手段を備えるため、一のステーションでは、同一の高さ位置への作業を行えばよく、作業性の効率の向上を図ることができる。
また、高さ制御手段は、ステーションごとにワークの作業対象箇所の高さを略一定となるように駆動装置の動作を制御するため、各ステーションにおける作業位置が略同一となり、このステーションでは、同じ高さ位置に対して所定の作業をすればよい。このため、各ステーションに配置される機器を簡単な機器(例えば、汎用機)で共用することができるため、生産ラインの簡素な構成で構築することができる。
【図面の簡単な説明】
【0013】
【図1】本実施形態に係る車両の適用例である搬送車の一部省略側面図である。
【図2】搬送車の内部概略構成を示す側面図である。
【図3】昇降装置の斜視図である。
【図4】ボールねじストロークとリフタストロークとの関係を示すグラフである。
【図5】昇降台が昇降した状態を示す側面図である。
【図6】搬送車が走行するルートを示す一部省略平面図である。
【図7】A〜Cは、搬送車が昇降台の高さを変更して走行する様子を示す側面図である。
【発明を実施するための形態】
【0014】
以下、本発明の一実施形態を添付した図面を参照して説明する。以下の説明中、前後左右及び上下といった方向の記載は車体に対してのものとする。また、図中矢印FRは車体前方を、矢印Rは車体右方を、矢印UPは車体上方をそれぞれ示している。
図1は、本実施形態に係る車両の適用例である搬送車10の一部省略斜視図であり、図2は、搬送車10の内部構造を示す一部省略側面図である。
搬送車10は、バッテリ11を電源として駆動する駆動ユニット12からの駆動力で所望の経路を走行可能な電動車両であり、例えば、自動車の生産ラインにて、自動車のエンジンやギアボックス等の部品(ワーク)を昇降可能な載置台(昇降台)13に積載し、工場内の所望の位置へと搬送するAGV(Automated Guided Vehicle)である。なお、本実施形態では、載置台13を備える車両の例示として電動で走行する搬送車10を挙げて説明するが、昇降可能な載置台を備える車両であれば、エンジン等の他の駆動手段によって走行する車両に適用可能である。
【0015】
搬送車10は、図1に示すように、車両本体20と、この車両本体20上に設けられて載置台13を昇降する昇降装置21とを備えて構成されている。車両本体20は、車長方向に延びて略箱型に形成されたフレーム20Aと、このフレーム20Aの周囲を覆うボディ20Bとを備え、フレーム20Aの前部には、四方に旋回自在なキャスタ22が配置され、後部には上記した駆動ユニット12が配置されている。この駆動ユニット12は、独立に駆動されて回転速度の調整が可能な左右一対の走行用モータ15と、各走行用モータ15の回転軸に15Aに直接連結されている駆動輪16と、回転軸15A周りの回転数(回転角度)を計測するロータリエンコーダ(不図示)と、走行用モータ15に電力を供給するバッテリ11とを備えて構成される。搬送車10は、左右一対の走行用モータ15を同一の回転数で駆動することにより、直進走行し、左右の走行用モータ15の回転数を異ならせることで、回転数の遅い走行用モータ15側に操舵することができる。また、バッテリ11は、例えば、搬送車10が待機や作業のために所定の作業ステーション(後述する)に停車された際、当該作業ステーションに設置された外部電源(不図示)によって充電される。搬送車10と外部電源とは、例えば、磁力で着脱可能な雄雌一対のコネクタによって、容易に電気的な接続が可能である。
【0016】
車両本体20の前部には、フレーム20Aの下部に取り付けられて搬送車10が走行すべき経路を検知するセンサ23と、このセンサ23からの信号等に基づいて駆動ユニット12の走行制御を行うとともに、昇降装置21の昇降制御を行う制御部24とが配置されている。また、車両本体20のボディ20Bは、このボディ20Bの左前部に、上方に向かうに連れて車幅中央側に傾斜した傾斜面20B1を備え、この傾斜面20B1には制御部24に対して各種操作を行うための操作スイッチが配置された操作パネル25が設けられている。
また、車両本体20の前方下部には、この車両本体20の前面から突出して車幅方向に延びるバンパースイッチ26が設けられ、このバンパースイッチ26の上方には、車両本体20の前面に取り付けられた非常停止スイッチ27が設けられている。バンパースイッチ26は、このバンパースイッチ26に強い衝撃を検出した際に制御部24に出力し、この制御部24の制御下、搬送車10の動作を停止させるものである。また、符号28は、昇降装置21を手動で操作する際に使用されるスイッチボックスである。
【0017】
次に、昇降装置21について説明する。
昇降装置21は、図2に示すように、載置台13に載せられたワークWを、平行状態を保った状態で上下方向に移動するものであり、車両本体20のフレーム20A上に搭載された基台30と、この基台30よりも大きく、車両本体20と略同じ大きさに形成された載置台13と、これら基台30と載置台13との間に介装された左右一対のリンク機構31,31と、このリンク機構31,31を上下に伸縮させるための駆動装置(アクチュエータ)32とを備える。
リンク機構31は、図3に示すように、それぞれ第1リンク34とこの第1リンク34の内側に配置された第2リンク35とを備え、これら第1リンク34及び第2リンク35は、X字状に交差した各リンク34、35の略中間位置で連結軸(軸支部材)36により回転自在に連結されている。第1リンク34,34の一端部34A,34A同士は連結軸37で連結され、この連結軸37の両端部は、それぞれ基台30から上方に延びる固定片38,38に回転自在に軸支されている。また、第1リンク34,34の他端部34B,34B同士は連結棒39で連結されるとともに、当該他端部34B,34Bには転動ローラ40,40が取り付けられ、この転動ローラ40,40は、それぞれ載置台13の下面に取り付けられたレール41,41に沿って転動可能に支持されている。これにより、第1リンク34,34の他端部34B,34Bは、載置台13の下面に沿って一体でスライド移動可能に支持されている。この図3では、右側(図中奥側)の第1リンク34の転動ローラ40及び、当該転動ローラ40が転動するレール41の記載を省略している。
また、第1リンク34には、一端部34A側が他端部34B側よりも幅広形状に上方に延びて形成され、この部分に駆動装置32によって進退駆動されるカムフォロアが案内される第1カム溝34Cが形成されている。
【0018】
一方、第2リンク35,35の一端部35A,35A同士は、連結軸42で連結され、この連結軸42の両端部は、それぞれ載置台13の下面から下方に延びる固定片43,43に回転自在に軸支されている。固定片43,43は、それぞれ上記した固定片38,38の略上方に形成されている。また、第2リンク35,35の他端部35B,35B同士は連結棒44で連結されるとともに、当該他端部35B,35Bには転動ローラ45,45が取り付けられ、この転動ローラ45,45は、それぞれ基台30の上面に取り付けられたレール46,46に沿って転動可能に支持されている。これにより、第2リンク35,35の他端部35B,35Bは、基台30の上面に沿って一体でスライド移動可能に支持されている。なお、この図3では、右側(図中奥側)の第2リンク35の転動ローラ45及び、当該転動ローラ45が転動するレール46の記載を省略している。
また、第2リンク35には、一端部35A側が他端部35B側よりも幅広形状に下方に延びて形成され、この部分に上記カムフォロアが案内される第2カム溝35Cが形成されている。この第2カム溝35Cは、第1カム溝34Cと対称形状に形成されて当該第1カム溝34Cと部分的に重なるように配置される。
【0019】
駆動装置32は、電動モータ50と、この電動モータ50により回転するねじ軸51と、このねじ軸51に噛み合わされたヘッド部52とを備える。電動モータ50は、板材を略コ字状に形成したブラケット53に固定され、このブラケット53が上記した連結軸36,36に取り付けられている。また、ヘッド部52はボールねじを内蔵し、ねじ軸51の回転により進退するように構成され、このヘッド部52の両側面には、それぞれ軸部52A,52Aが突出し、これら軸部52A,52Aにはカムフォロア54,54が回転自在に取り付けられている。このカムフォロア54,54は、上記した第1リンク34及び第2リンク35にそれぞれ形成された第1カム溝34C及び第2カム溝35Cの双方に沿って当該カム溝内を移動するように配置される。
【0020】
本実施形態では、カムフォロア54,54は、図2に示すように、対称形状に形成された第1カム溝34C及び第2カム溝35C内であって、上記連結軸36と略同じ高さ位置に配置されている。この状態で、駆動装置32の電動モータ50を上昇側に駆動すると、ねじ軸51が回転してヘッド部52が連結軸36に接近する方向へ相対移動する。ヘッド部52が連結軸36に接近する方向へ移動すると、このヘッド部52に連結されたカムフォロア54,54が第1カム溝34C及び第2カム溝35C内を当該連結軸36に対して水平方向に進行する。このため、図3に示すように、第1リンク34及び第2リンク35の各他端部34B,35Bに設けられている転動ローラ40,45がそれぞれレール41,46内をスライド移動することにより、第1リンク34及び第2リンク35は、図4に想像線で示すように、それぞれ起立する方向へ傾動し、両リンク機構31,31が上方へ伸長し、これにより載置台13が基台30に対して平行に上昇する。載置台13の上昇状態は、電動モータ50がその内蔵ブレーキ(例えば電磁式ブレーキ)により回転不能にロックされることにより維持される。
この場合、第1カム溝34C及び第2カム溝35Cは互いに対称形状に形成されるとともに、駆動装置32がカムフォロア54,54を連結軸36に対して水平方向に移動させるため、駆動装置32(電動モータ50)の駆動力を、カムフォロア54,54を介して、第1リンク34,34及び第2リンク35,35に対して均等に伝達することができる。このため、第1リンク34,34及び第2リンク35,35は、上記駆動力を受けてスムーズに起立する方向へ傾動することにより、載置台13をスムーズな動作で上昇させることができる。
【0021】
これに対して、電動モータ50の内蔵ブレーキを解放するとともに該電動モータ50を逆回転方向へ起動することにより載置台13を下降させることができる。この載置台13の下降時には、ヘッド部52が連結軸36から離間する方向へ相対移動する。すると、ヘッド部52に連結されたカムフォロア54,54が第1カム溝34C及び第2カム溝35C内を当該連結軸36に対して水平方向に進行する。このため、図3に示すように、第1リンク34及び第2リンク35の各他端部34B,35Bに設けられている転動ローラ40,45がそれぞれレール41,46内をスライド移動することにより、第1リンク34及び第2リンク35は、図4に示すように、それぞれ倒伏する方向へ傾動し、両リンク機構31,31が下方へ収縮し、これにより載置台13が基台30に対して平行に下降する。
この場合でも、電動モータ50の駆動力は、カムフォロア54,54を介して、第1リンク34,34及び第2リンク35,35に対して均等に伝達することができる。このため、第1リンク34,34及び第2リンク35,35は、上記駆動力を受けてスムーズに倒伏する方向へ傾動することにより、載置台13をスムーズな動作で下降させることができる。
【0022】
本実施形態では、第1カム溝34Cは上方に膨らんだ円弧状に形成され、第2カム溝35Cは下方に膨らんだ円弧状に形成されて、両カム溝は第1リンク及び第2リンクをX字状に連結軸36で連結した状態で対称となっている。また、第1カム溝34C及び第2カム溝35Cは、図4に示すように、これらカム溝内に位置するカムフォロア54と連結軸36との距離の変化量L1−L2と載置台13の昇降量ΔHとの比が略一定となる形状に形成されている。
発明者達の実験によれば、図5に示すように、電動モータ50のボールねじ(ねじ軸51)ストロークとリフタストロークとの比が1:2.5となるように、第1カム溝34C及び第2カム溝35Cが形成されている。なお、この図5において、ボールねじストロークは、カムフォロア54と連結軸36との距離の変化量L1−L2に相当し、リフタストロークは載置台13の昇降量ΔHに相当する。
この構成によれば、第1カム溝34C及び第2カム溝35Cは、カムフォロア54と連結軸36との距離の変化量L1−L2と、載置台13の昇降量ΔHとの比が略一定となるように形成されているため、載置台13を所定の昇降量に制御するあたり、上記比から算出されるボールねじストローク分だけ電動モータ50を駆動すれば、所定の昇降量に自動的に制御することができる。このため、載置台13の昇降動作を素早くかつ正確に実行することができる。
【0023】
また、本構成では、第1リンク34及び第2リンク35の各他端部34B,35B間には、当該他端部34B,35Bを近接させる方向に付勢されたばね部材(弾性体)64が設けられている。具体的には、図2に示すように、第1リンク34の他端部34Bには、第1パイプ60の他端60Aが上記転動ローラ40の回転軸に回動自在に固定されている。この第1パイプ60は、転動ローラ40とともにレール41内を摺動し、第1パイプ60の一端60Bにばね部材64の他端が連結されている。
一方、載置台13の前方には、第2パイプ61が配置され、この第2パイプ61の一端61Aは、載置台13の下面から下方に延びる固定片63に連結軸62を介して連結されている。第2パイプ61の他端61Bは、第2リンク35の他端部35Bが連結される固定片43に固定されるとともに、上記ばね部材64の一端が連結されている。これにより、ばね部材64の両端が一対のパイプ60,61によって支持されるため、このばね部材64の座屈が防止される。
この構成によれば、第1リンク34及び第2リンク35の各他端部34B,35B間には、当該他端部34B,35Bを近接させる方向に付勢されたばね部材64が設けられているため、電動モータ50を上昇側に駆動させた場合、第1リンク34及び第2リンク35には、電動モータ50の駆動力に加えてばね部材64の付勢力が作用するため、載置台13上にワークWを載置した状態であっても、当該載置台13をよりスムーズに上昇させることができる。
【0024】
次に、載置台13を備える搬送車10の動作について説明する。
図6は、搬送車10が走行する搬送経路を示す一部省略平面図である。本実施形態にかかる搬送車10は、例えば、自動車の生産工場内の所定の搬送経路を走行するものである。この搬送経路には、複数の作業ステーション102a〜102cが設けられ、各作業ステーション102a〜102cで、載置台13上のエンジンやギアボックス等のワークWに対して部品の組み付け作業が行われる。
搬送経路は、各作業ステーション102a〜102c間をそれぞれ工場内に敷設された磁気テープ86によって接続することにより形成され、搬送車10は、この磁気テープ86に案内されて当該搬送経路上を走行する。
各作業ステーション102a〜102cには、作業ロボット106a〜106cが配置され、搬送車10で搬送されたワークWに所望の部品(図示せず)を組み付ける作業を行う。搬送車10の制御部(高さ制御手段)24は、搬送されるワークWの種類に応じて各作業ステーション102a〜102cで決められた高さ位置にワークWを昇降するために、駆動装置32を制御する。本構成では、上述のように、電動モータ50のねじ軸51のストロークと載置台13の昇降量との比が略一定となっているため、一の作業ステーション102aに停止した際に、当該作業ステーション102aにおけるワークWの高さ位置に正確に当該ワークWを昇降させることができる。このため、一の作業ステーション102aでは、作業ロボット106aは同一の高さ位置へ作業を行えばよく、作業性の効率の向上を図ることができる。
【0025】
また、本実施形態では、図7に示すように、制御部24は、作業ステーション102a〜102cごとにワークWの作業対象箇所の高さ位置Hが略一定となるように駆動装置32を制御している。制御部24には、予め、各作業ステーションで作業されるワークの作業対象箇所の高さ位置が記憶されており、この作業対象箇所の高さを所定の高さ位置Hとするように電動モータ50の動作を制御する。
具体的には、図7Aに示すように、1番目の作業ステーション102aでは、例えば、ワークWの上部に設けられた作業対象箇所80a,80bに対して作業を行うため、制御部24は、作業対象箇所80a,80bが高さ位置Hとなるように電動モータ50を制御する。この1番目の作業ステーション102aでは、作業ロボットが作業対象箇所80a,80bに対して所定の部品の組み付け作業を行う。
続いて、搬送車10は、2番目の作業ステーション102bに向けて走行し、この走行途中で載置台13を上昇させる。この場合、図7Bに示すように、制御部24は、2番目の作業ステーション102bでのワークWの作業対象箇所82a,82bの高さ位置が上記した高さHとなるように電動モータ50を制御する。そして、この2番目の作業ステーション102bでは、1番目の作業ステーション102aと同様に、作業ロボットが作業対象箇所82a,82bに対して所定の部品の組み付け作業を行う。
続いて、搬送車10は、3番目の作業ステーション102cに向けて走行し、この走行途中で載置台13を下降させる。この場合、図7Cに示すように、制御部24は、3番目の作業ステーション102cでのワークWの作業対象箇所81a,81bの高さ位置が上記した高さHとなるように電動モータ50を制御する。そして、この3番目の作業ステーション102cでは、1番目、2番目の作業ステーション102a,102bと同様に、作業ロボットが作業対象箇所81a,81bに対して所定の部品の組み付け作業を行う。
【0026】
この構成では、各作業ステーション102a〜102cごとに、ワークWの作業対象箇所の高さ位置Hを略一定となるように電動モータ50が制御されるため、各作業ステーションにおいて、作業ロボットは同じ高さ位置に対して所定の作業をすればよい。このため、作業ロボットとして簡単な機器(例えば、汎用機)を使用することができるため、生産ラインの簡素な構成で構築することができる。さらに、各ステーションでの作業性を格段に向上させることができる。
【0027】
以上、説明したように、本実施形態によれば、基台30と、この基台30に対して昇降する載置台13とを備える昇降装置21において、一端部34Aが基台30に軸支され、他端部34Bが載置台13に支承される第1リンク34と、一端部35Aが載置台13に軸支され、他端部35Bが基台30に支承される第2リンク35と、これら第1リンク34及び第2リンク35をX字状に交差した位置で軸支する連結軸36と、第1リンク34及び第2リンク35にそれぞれ形成された第1カム溝34C及び第2カム溝35Cの双方に沿って該カム溝内を移動するカムフォロア54と、連結軸36に支持されてカムフォロア54を当該連結軸36に対して略水平方向に進退させる駆動装置32とを備えたため、駆動装置32の駆動力を、カムフォロア54を介して、第1リンク34及び第2リンク35に対して均等に伝達することができる。このため、第1リンク34及び第2リンク35は、上記駆動力を受けてスムーズに起立する方向へ傾動することにより、載置台13をスムーズな動作で上昇させることができる。
【0028】
また、本実施形態によれば、第1カム溝34C及び第2カム溝35Cは、連結軸36とカムフォロア54との距離の変化量L1−L2と、載置台13の昇降量ΔHとの比が略一定となる形状にそれぞれ形成されているため、載置台13を所定の昇降量に制御するあたり、上記比から算出されるボールねじストローク分だけ電動モータ50を駆動すれば、所定の昇降量に自動的に制御することができる。このため、載置台13の昇降動作を素早くかつ正確に実行することができる。
【0029】
また、本実施形態によれば、第1リンク34及び第2リンク35の他端部34B,35B間には、載置台13に下面に沿って配置され、第1リンク34の他端部34Bと第2リンク35の他端部35Bとを連結し、当該第1リンク34の他端部34Bと第2リンク35の他端部35Bとを近接する方向に付勢するばね部材を備えるため、電動モータ50を上昇側に駆動させた場合、第1リンク34及び第2リンク35には、電動モータ50の駆動力に加えてばね部材64の付勢力が作用するため、載置台13上にワークWを載置した状態であっても、当該載置台13をよりスムーズに上昇させることができる。
【0030】
また、本実施形態によれば、載置台13上にワークWを搭載して作業ステーション102a〜102c間を走行するとともに、一のステーションに停止した際に、制御部24は、当該ステーションで決められた高さ位置にワークWを昇降させるように、駆動装置32の電動モータ50の動作を制御するため、一の作業ステーションでは、作業ロボットは同一の高さ位置への作業を行えばよく、作業性の効率の向上を図ることができる。
【0031】
また、本実施形態によれば、制御部24は、ステーションごとにワークWの作業対象箇所の高さ位置を略一定となるように駆動装置32の電動モータ50の動作を制御するため、各作業ステーションにおいて、作業ロボットは同じ高さ位置に対して所定の作業をすればよい。このため、作業ロボットとして簡単な機器(例えば、汎用機)を使用することができるため、生産ラインの簡素な構成で構築することができる。さらに、各ステーションでの作業性を格段に向上させることができる。
【0032】
なお、本発明は、上記実施形態に限らず、本発明の要旨を逸脱することなく、種々の構成を採り得ることは勿論である。例えば、本実施形態の搬送車10は、駆動ユニット12は、走行用モータ15を備える構成としているが、エンジン等の内燃機関やぜんまい駆動など他の駆動源を用いることができるのは勿論である。また、本実施形態では、走行用モータ15に電力を供給する電力供給部としてバッテリ11を備える構成としているが、例えば、床面等に電力架線を設け、この電力架線を介して走行用モータに電力を供給する構成としても良い。また、バッテリ11を外部電源のみで充電するのではなく、例えば、搬送車にソーラーパネルを設け、このソーラーパネルと外部電源とを併用する構成としても良い。
【0033】
また、本実施形態では、昇降装置21の駆動装置32として電動モータ50とねじ軸51とヘッド部52とを備える構成としたが、例えば、油圧により伸縮する油圧シリンダを用いることができるのは勿論である。
【符号の説明】
【0034】
10 搬送車(車両)
12 駆動ユニット
13 載置台(昇降台)
20 車両本体
20A フレーム
21 昇降装置
24 制御部(高さ制御手段)
30 基台
31 リンク機構
32 駆動装置(アクチュエータ)
34 第1リンク
34A 一端部
34B 他端部
34C 第1カム溝
35 第2リンク
35A 一端部
35B 他端部
35C 第2カム溝
36 連結軸(軸支部材)
50 電動モータ
51 ねじ軸
52 ヘッド部
54 カムフォロア
64 ばね部材(弾性部材)
80a、80b、81a、81b、82a、82b 作業対象箇所
102a〜102c 作業ステーション
W ワーク
【特許請求の範囲】
【請求項1】
基台と、この基台に対して昇降する昇降台とを備える昇降装置において、
一端が前記基台に軸支され、他端が前記昇降台に支承される第1リンクと、一端が前記昇降台に軸支され、他端が前記基台に支承される第2リンクと、これら第1リンク及び第2リンクをX字状に交差した位置で軸支する軸支部材と、前記第1リンク及び第2リンクにそれぞれ形成された第1カム溝及び第2カム溝の双方に沿って該カム溝内を移動するカムフォロアと、前記軸支部材に支持されて前記カムフォロアを当該軸支部材に対して略水平方向に進退させるアクチュエータとを備えたことを特徴とする昇降装置。
【請求項2】
前記第1カム溝及び第2カム溝は、前記軸支部材と前記カムフォロアとの距離の変化量と、前記昇降台の昇降量との比が略一定となる形状にそれぞれ形成されていることを特徴とする請求項1に記載の昇降装置。
【請求項3】
前記第1リンク及び前記第2リンクの他端間には、前記昇降台に沿って配置され、前記第1リンクの他端と前記第2リンクの他端とを連結し、当該第1リンクの他端と第2リンクの他方とを近接する方向に付勢する弾性部材を備えることを特徴とする請求項1または2に記載の昇降装置。
【請求項4】
請求項1乃至3のいずれかに記載の昇降装置を備える車両であって、
前記昇降台上にワークを搭載してステーション間を走行するとともに、一のステーションに停止した際に、当該ステーションで決められた高さ位置に前記ワークを昇降させるように、前記アクチュエータの動作を制御する高さ制御手段を備えることを特徴とする車両。
【請求項5】
前記高さ制御手段は、前記ステーションごとに前記ワークの作業対象箇所の高さを略一定となるように前記アクチュエータの動作を制御することを特徴とする請求項4に記載の車両。
【請求項1】
基台と、この基台に対して昇降する昇降台とを備える昇降装置において、
一端が前記基台に軸支され、他端が前記昇降台に支承される第1リンクと、一端が前記昇降台に軸支され、他端が前記基台に支承される第2リンクと、これら第1リンク及び第2リンクをX字状に交差した位置で軸支する軸支部材と、前記第1リンク及び第2リンクにそれぞれ形成された第1カム溝及び第2カム溝の双方に沿って該カム溝内を移動するカムフォロアと、前記軸支部材に支持されて前記カムフォロアを当該軸支部材に対して略水平方向に進退させるアクチュエータとを備えたことを特徴とする昇降装置。
【請求項2】
前記第1カム溝及び第2カム溝は、前記軸支部材と前記カムフォロアとの距離の変化量と、前記昇降台の昇降量との比が略一定となる形状にそれぞれ形成されていることを特徴とする請求項1に記載の昇降装置。
【請求項3】
前記第1リンク及び前記第2リンクの他端間には、前記昇降台に沿って配置され、前記第1リンクの他端と前記第2リンクの他端とを連結し、当該第1リンクの他端と第2リンクの他方とを近接する方向に付勢する弾性部材を備えることを特徴とする請求項1または2に記載の昇降装置。
【請求項4】
請求項1乃至3のいずれかに記載の昇降装置を備える車両であって、
前記昇降台上にワークを搭載してステーション間を走行するとともに、一のステーションに停止した際に、当該ステーションで決められた高さ位置に前記ワークを昇降させるように、前記アクチュエータの動作を制御する高さ制御手段を備えることを特徴とする車両。
【請求項5】
前記高さ制御手段は、前記ステーションごとに前記ワークの作業対象箇所の高さを略一定となるように前記アクチュエータの動作を制御することを特徴とする請求項4に記載の車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−195299(P2011−195299A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−65003(P2010−65003)
【出願日】平成22年3月19日(2010.3.19)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月19日(2010.3.19)
【出願人】(000005326)本田技研工業株式会社 (23,863)
[ Back to top ]