
昇降装置
【課題】搬送通路との干渉を避け、且つワークを安定して昇降させる。
【解決手段】ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、各垂直軸に個別に対応して設けられ、ワークを支持可能な複数のアームと、各アームに個別に対応して設けられ、対応するアームを垂直軸に沿って昇降させる複数の昇降アクチュエータと、複数の昇降アクチュエータを駆動制御する昇降制御部と、各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、昇降制御部より与えられる指令に基づいて各昇降アクチュエータが駆動され、揺動制御部より与えられる指令に基づいて各揺動アクチュエータが駆動される昇降装置において、アームが、垂直軸に連結されて水平面内を揺動可能な平行リンク部と、平行リンク部に連結されて水平面内を揺動可能な先端部とを有する。
【解決手段】ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、各垂直軸に個別に対応して設けられ、ワークを支持可能な複数のアームと、各アームに個別に対応して設けられ、対応するアームを垂直軸に沿って昇降させる複数の昇降アクチュエータと、複数の昇降アクチュエータを駆動制御する昇降制御部と、各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、昇降制御部より与えられる指令に基づいて各昇降アクチュエータが駆動され、揺動制御部より与えられる指令に基づいて各揺動アクチュエータが駆動される昇降装置において、アームが、垂直軸に連結されて水平面内を揺動可能な平行リンク部と、平行リンク部に連結されて水平面内を揺動可能な先端部とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワークを昇降させる昇降装置に関する。
【背景技術】
【0002】
従来、様々な生産現場で、ワークを昇降させる昇降装置が利用されている(例えば特許文献1,2参照)。
【0003】
特許文献1は、ワーク載置用のパレットを備えた昇降装置を開示している。この昇降装置によると、パレットが多関節ロボットのアーム先端に固着され、該多関節ロボットの動作に応じて昇降する。
【0004】
特許文献2は、ワークを把持するハンドを備えた昇降装置を開示している。この昇降装置は、一対の垂直部及び一対の水平部からなる矩形枠状のハウジングを備えている。各垂直部には上下に延びるボールネジが内蔵され、ハウジングの枠内には、一対のボールネジに夫々螺合するナット間に架け渡された中空支柱が配置されている。ハンドはこの中空支柱に取り付けられ、ボールネジの回転に応じて中空支柱と共に上下に移動する。ハンドの上下移動を安定させるには各ボールネジに駆動力を同期して入力する必要があるため、ハウジングの下側水平部内では、モータの駆動力を各ボールネジに伝達するためのモータ軸が水平に延在している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−74333号公報
【特許文献2】特開平10−157847号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1に記載の昇降装置によると、1台のロボットで大重量のワークの荷重を支持しなければならず、この荷重に耐え得る強度の確保のためロボットの構造が大型化するおそれがある。更に、パレットの下面重心部がアーム先端に支持されているため、ワークの重心がパレットの下面重心部から偏るとパレットの傾きを招き、ワークを安定的に昇降させることが困難となる。
【0007】
特許文献2に記載の昇降装置はこのような問題を解決し得るが、特許文献2に記載の昇降装置を重量ワークの搬送に流用することは困難である。重量ワークの生産工場に設置される昇降装置は、工場の床部に設置されたコンベアと天井部に設置されたハンガーとの間でワークを搬送するために供されることがあり、特許文献2の記載に従う昇降装置を重量ワークの生産工場に設置すると、ハウジングの下側水平部及びモータ軸がコンベアと干渉するおそれがあるからである。モータ軸を単純に省略すると、ワークを安定して昇降させるために2本のボールネジを同期して回転駆動するための構成を別途付与する必要が生じる。
【0008】
そこで本発明は、ワークを安定して昇降させることができ、且つ該ワークを搬送するための他の搬送通路との干渉を避けることを目的としている。
【課題を解決するための手段】
【0009】
本発明は上記事情に鑑みてなされており、本発明に係る昇降装置は、ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、前記各垂直軸に個別に設けられ、ワークを支持可能な複数のアームと、前記各アームに個別に設けられ、対応するアームを前記垂直軸に沿って昇降させる複数の昇降アクチュエータと、前記各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、前記複数の昇降アクチュエータを駆動制御する昇降制御部と、前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、前記昇降制御部より与えられる指令に基づいて前記各昇降アクチュエータが駆動され、前記揺動制御部より与えられる指令に基づいて前記各揺動アクチュエータが駆動される昇降装置において、前記アームが、前記垂直軸に連結されて水平面内を揺動可能な平行リンク部と、前記平行リンク部に連結されて水平面内を揺動可能な先端部とを有することを特徴としている。
【0010】
このような構成とすることにより、単一の昇降制御部より同時に与えられる指令に基づき各昇降アクチュエータが駆動される構成としたため、複数の昇降アクチュエータの動作の協調性・同期性が高くなる。よって、ワークの昇降を安定的に行わせることができる。また、従来の装置によれば、単一の昇降アクチュエータから出力される駆動力を各アームに伝達するための軸を搬送通路を横切るようにして設ける必要があったが、各アームに個別に昇降アクチュエータを設けたことによって該軸を省略することができ、昇降装置と搬送通路との干渉を避けることができる。また、単一の揺動制御部より与えられる指令に基づき各揺動アクチュエータが駆動される構成ともしているため、複数の揺動アクチュエータの動作の協調性・同期性が高くなる。そして、アームの基端側が平行リンク部を構成しているため、ワークの重力モーメントをこの平行リンク部において分散して受けることができ、先端部に作用するねじり方向の荷重を軽減することができる。
【0011】
前記アームの先端部に連結されて水平面内を揺動可能なバーと、前記バーの両端部に設けられた一対のワーク支持部と、前記アームの姿勢に関わらず前記搬送通路に沿って搬送されるワークに対する前記バーの水平面内における向きを保持する保持機構と、を更に備えていてもよい。これにより、アームの姿勢に関わらず一対のワーク支持部の搬送経路に対する姿勢が変わらなくなるため、アームを動作させてもワーク支持部によりワークを安定して支持することができる。
【発明の効果】
【0012】
このように本発明によれば、ワークを安定的に昇降させることができ、且つワークを搬送するための他の搬送通路と昇降装置とが干渉するのを避けることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る昇降装置が設置された重量ワークの生産工場のレイアウトの一例を平面視で示す模式図である。
【図2】図1に示す昇降装置の平面図である。
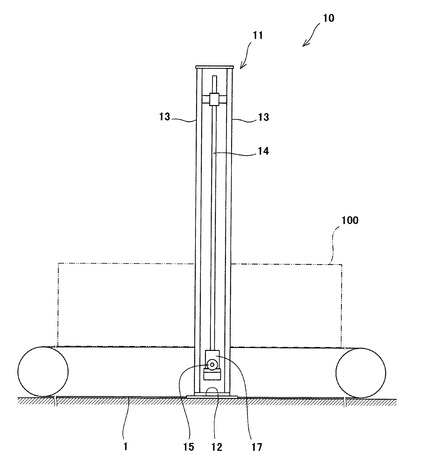
【図3】図1に示す昇降装置の正面図である。
【図4】図1に示す昇降装置の側面図である。
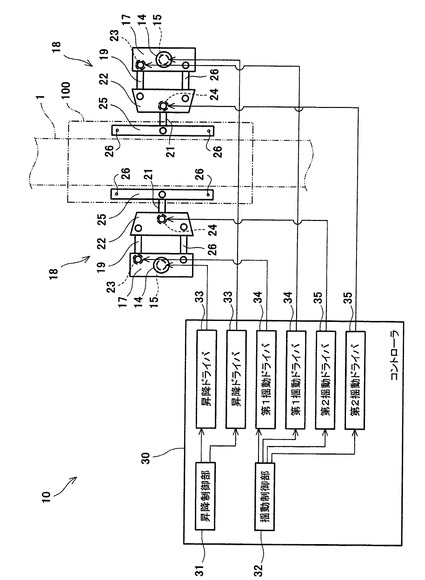
【図5】図1に示す昇降装置の制御系の構成を模式的に示すブロック図である。
【発明を実施するための形態】
【0014】
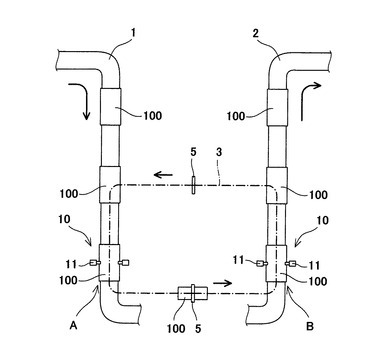
以下これら図面を参照して本発明の実施形態について説明する。図1に模式的に示す重量ワークの生産工場には、床部に敷設された第1及び第2コンベアライン1,2と、天井部に敷設されたハンガーライン3とが備えられている。第1及び第2コンベアライン1,2に沿ってワーク100が搬送され、ハンガーライン3に沿ってワーク100を吊るすためのハンガー5が搬送される。
【0015】
この工場には、コンベアライン1,2とハンガーライン3との間でワーク100を上昇又は下降させる昇降装置10が備えられている。第1コンベアライン1とハンガーライン3とは所定地点Aにおいて平面視で重なり、第2コンベアライン2とハンガーライン3とは所定地点Bにおいて平面視で重なっている。昇降装置10はこれら2地点A,Bに夫々設置され、ハンガー5はハンガーライン3に沿って地点Aから地点Bへ向かって搬送される。2機の昇降装置10は同様の構成を有しており、地点Aに設置された昇降装置10は第1コンベアライン1に沿って搬送されたワーク100を上昇させるために供され、地点Bに設置された昇降装置10はハンガーライン3に沿って搬送されたワーク100を下降させるために供されている。
【0016】
以下の昇降装置の説明では、2機のうち地点Aに設置された昇降装置10のみ説明し、地点Bに設置された昇降装置10に関する重複説明を省略する。なお、昇降装置10が設置される地点A周辺にて、ライン1,3が延在する方向を「前後方向」、ライン1,3の幅方向を「左右方向」としている。また、平面視においてワーク100の長辺方向がコンベアライン1の延在方向に向けられ、短辺方向がコンベアライン1の幅方向(即ち延在方向と直交する方向)に向けられるものとしている。ハンガー5で吊るされたワーク100の向きとハンガーライン3の向きとの関係もこれと同様としている。
【0017】
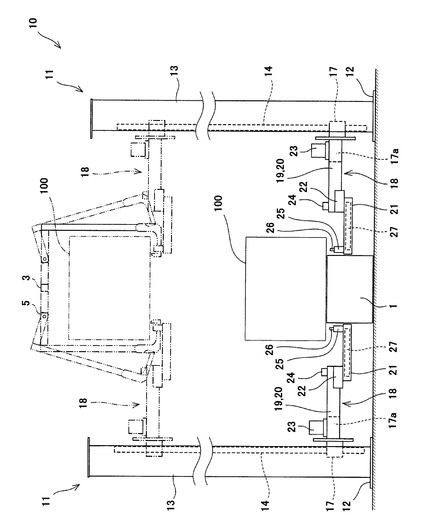
図2乃至図4に示すように、昇降装置10は、コンベアライン1を挟むようにして左右に分かれて対向配置された柱11を備えている。各柱11は床面上のベース12に立設する前後一対の壁13を有し、これら壁13で挟まれた空間内をボールネジ14が垂直に延びている。ボールネジ14の両端部は壁13に取り付けられた図示しない軸受で支持され、ボールネジ14はその軸線周りに回転可能であって軸線方向に直動不能となっている。
【0018】
柱11の下部にはボールネジ14の下端に隣接配置された昇降モータ15と、昇降モータ15とボールネジ14の下端との間に設けられた動力伝達機構16とが配設されている。昇降モータ15が動作すると、昇降モータ15の回転駆動力が動力伝達機構16を介してボールネジ14に入力され、ボールネジ14が回転する。
【0019】
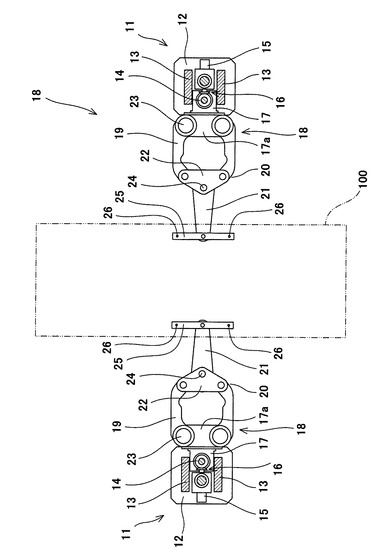
ボールネジ14にはブロック17が螺合している。ブロック17は回転不能に取り付けられているため、ボールネジ14が回転するとボールネジ14の軸方向に沿って上方又は下方に直動する。そして、このブロック17には柱11に対してライン1,3が配置されている側に突出するベース17aが固着されており、このベース17aに水平に延在するアーム18が連結されている。ボールネジ14が回転するとブロック17及びベース17aと共にアーム18がボールネジ14の軸方向に沿って昇降するようになっている。
【0020】
アーム18は、第1乃至第3アーム19〜21を備えてなり、第1及び第2アーム19,20の基端部はベース17aに揺動可能に連結され、その先端部は関節部材22に揺動可能に連結されている。この関節部材22には第3アーム21の基端部が揺動可能に連結されている。ベース17a、第1及び第2アーム19,20及び関節部材22は平行リンク機構を構成しており、第1及び第2アーム19,20の回転角度位置に関わらず、関節部材22のベース17aに対する水平面内での姿勢が変化せず、よってコンベアライン1、ハンガーライン3、柱11及びボールネジ14に対する姿勢が変化しない。従って、関節部材22に連結されている第3アーム21の水平面内での姿勢も第1及び第2アーム19,20の回転角度位置に依存しなくなり、第3アーム21の動作制御及び位置制御を容易に行えるようになる。
【0021】
第1アーム19とベース17aとの枢支部には、第1アーム19の基端部に連結された第1揺動モータ23が配設されており、第3アーム21と関節部材22との枢支部には、第3アーム22の基端部に連結された第2揺動モータ24が配設されている。第1揺動モータ23が動作すると、第1アーム19がベース17aとの枢支部となる基端部を中心にしてベース17aに対して揺動し、第2アーム20が第1アーム19と平行に延びる状態を維持しつつ第1アーム19に連れてベース17aに対して揺動する。第2揺動モータ24が動作すると、第3アーム21が関節部材22との枢支部となる基端部を中心にして関節部材22に対して揺動する。
【0022】
このようなアーム18が各ボールネジ14に個別に1つずつ設けられている。各アーム18は水平面内を揺動可能であるが第3アーム21の先端部は常にボールネジ14を基準にしてコンベアライン1及びハンガーライン3が設置されている側に位置している。即ち、左右のアーム18,18は実質的に互いに向き合う方向に延びている。
【0023】
各第3アーム21の先端部にはバー25の中央部が連結されている。バー25は水平に延在すると共に第3アーム21に対して水平面内を揺動可能になっている。第3アーム21及び関節部材22の内部には、第3アーム21の回転角度位置に関わらずバー25の水平面内での姿勢を一定に保持する保持機構27が設けられている。この保持機構27の作用により、バー25の姿勢が常に前後に水平に延びる状態に保持される。即ち、バー25の姿勢は、昇降装置10が設置される地点Aでのライン1,3の延在方向と平行に水平に延びる状態であって、これらライン1,3に沿って搬送されるワーク100の長辺方向と平行に水平に延びる状態に保持される。
【0024】
ここで、ワーク100の下面側には複数の支持点(図示せず)が設けられており、この支持点においてワーク100を下側から支持可能になっている。典型的には合計4個の支持点が、ワーク100下面側の短辺方向両側縁部にて前後に離れて設けられている。昇降装置10は、一対のバー25の両端部、即ち4つの端部には、上方に突設した駒部26が設けられており、この駒部26を支持点に夫々当接させることにより、ワーク100を下側から支持する構成となっている。
【0025】
このようにアーム18を水平面内で揺動可能な構成としたことにより、アーム18の水平面内での動作範囲が広くなる。このようなアーム18の先端にワーク100を支持するための駒部26が設けられているため、ワーク幅(短辺方向の寸法)が異なる複数種のワーク100の夫々に対応してワーク100の支持を行うことができるようになり、汎用性が高くなる。なお、アーム18を伸縮可能に構成することにより、ワーク長(長辺方向の寸法)の異なる複数種のワーク100にも対応することができるようになり、汎用性がより高くなる。
【0026】
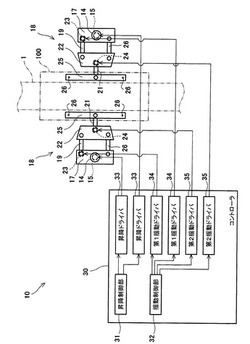
図5には昇降装置10の制御系の構成を示すブロック図を示している。昇降装置10はアーム18の動作を制御するコントローラ30を備えている。コントローラ30はアーム18の昇降を制御する昇降制御部31と、アーム18の揺動を制御する揺動制御部32とを備えている。
【0027】
昇降制御部31には2つの昇降ドライバ33が接続されている。各昇降ドライバ33は、各ボールネジ14に個別に設けられている昇降モータ15に夫々対応して設けられている。揺動制御部32には2つの第1揺動ドライバ34と2つの第2揺動ドライバ35とが接続されている。各第1揺動ドライバ34は、各第1アーム19に個別に設けられた第1揺動モータ23に夫々対応して設けられ、各第2揺動ドライバ35は、各第3アーム21に個別に設けられた第2揺動モータ24に夫々対応して設けられている。各昇降ドライバ33は昇降指令部31から入力した動作指令に基づいて自身に対応する昇降モータ15に駆動信号を出力し、該昇降モータ15を駆動する構成となっている。揺動指令部32と各第1揺動ドライバ34と各第1揺動モータ23の関係、及び揺動指令部32と各第2揺動ドライバ35と各第2揺動モータ24の関係もこれと同様である。
【0028】
なお、少なくとも昇降制御部31と昇降ドライバ33とは同一の基板上に設けられており、揺動制御部32と第1及び第2揺動ドライバ34,35とは同一の基板上に設けられている。これによりコントローラ30の構成がコンパクトになっている。但し、昇降制御部31と揺動制御部32とが同一の基板上に設けられていてもよい。
【0029】
本実施形態に係る昇降装置10においては、単一の昇降制御部31から同時に2つの昇降ドライバ33に同等の動作指令が出力されるようになっており、各昇降ドライバ11はこの動作指令に基づいて対応する昇降モータ15を駆動するようになっている。よって、2つの昇降モータ15の動作の同期性が確保され、2つのアーム18の昇降が同期して行われるようになる。このため、ワーク100の昇降を安定して行わせることができる。
【0030】
これと同様に、単一の揺動制御部32から同時に出力される同等の動作指令に基づいて2つの第1揺動モータ23及び2つの第2揺動モータ24が駆動制御される。よって、アーム18の揺動が同期して行われ、昇降装置10の動作を安定して行わせることができる。
【0031】
また、この昇降装置10によると、コントローラ30が収容されるボックスをコンベアライン1と同様に工場の床部に設置した場合、典型的にはボックスがコンベアライン1に対して左右いずれか一方の外側に配置される。このボックスと同じ側に配置された各モータは、床部を這うようにして設けられたケーブルを介してコントローラと接続されることとなる。ボックスと反対側に配置された各モータは、コンベアライン1を超えるようにして設けられたケーブルを介してコントローラ30と接続されることとなる。地点Aに対して下流側においてはワーク100が無く、ケーブルがコンベアライン1上を超えるような配置を簡単に行うことができる。また、ケーブルであれば、従来の装置のように柱11間を直線状に延びるように配置せず、柱11に対してコンベアラインの延在方向に変位した箇所で該コンベアライン1上を超えるような配線レイアウトを容易に行うことができる。このようにして、昇降装置1とライン1〜3との干渉を避けた上でアーム18の動作の同期性を確保することができる。
【0032】
地点Aに設置された昇降装置10を用いてワーク100を上昇する際のコントローラ30及びアーム18の動作を説明する。まず、初期状態では、ブロック17がボールネジ14の下端部において螺合してアーム18が昇降範囲の下限に位置していると共に、アーム18は所定の格納姿勢にある。アーム18が昇降範囲の下限に位置していると、バー25がワーク100の下面よりも下方に位置するようになっている。また、格納姿勢とは、第1乃至第3アーム19〜21が左右方向に真っ直ぐ延在する状態とはなっておらずバー15を柱11寄りに位置させるようなアーム18の姿勢を指す。例えば、第1及び第2アーム19,20と、第3アーム21とが平面視L字形状を成すようにアーム18が折り畳まれた姿勢を指す。
【0033】
コンベアライン1に沿って搬送されるワーク100が地点Aで停止すると、各バー25をコンベアライン1が配置されている側に移動させるようにしてアーム18を揺動し、各バー25をワーク100の下方に位置させる。上記のように単一の揺動制御部32からの動作指令に基づいて2本のバー25を移動させることとなるため、2つのバー25の移動速度及び位置は互いに同じになる。
【0034】
バー25が所定位置になるまでアーム18を揺動させると、アーム18を上昇させる。駒部26には夫々図示しないリミットスイッチが取り付けられ、各駒部26が支持点に当接すると該スイッチからコントローラ30にON信号が出力されるようになっている。コントローラ30は4つのリミットスイッチからのON信号が出力されると、アーム18を更に上昇させる。少なくともこの上昇開始時点で、地点Aではハンガーライン3に沿って搬送されたハンガー5が開状態で待機しており、アーム18を昇降範囲の上限に位置させるとワーク100が開状態のハンガー5内に位置するようになっている。その後、ハンガー5を閉状態とした上で、アーム18を僅かに下降させることにより、ワーク100をハンガー5で支持される状態とする。コントローラ30は、4個のリミットスイッチからOFF信号が出力されていることに基づき、ハンガー5でワーク100が支持された状態になっていることを検知可能となっている。このようにしてワーク100をハンガー5に移し返ると、更にアーム18を僅かに下降させ、アーム18を揺動させて格納姿勢にする。そして、アーム18を昇降範囲の下限まで下降させ、昇降装置10が初期状態に戻る。
【0035】
上記のように単一の昇降制御部31からの動作指令に基づいてアーム18及びバー25を昇降させることとなるため、アーム18及びバー25の昇降速度及び上下位置は互いに同じになる。よって、ワーク100の昇降を安定的に行わせることができる。
【0036】
また、別個のボールネジ14に設けられた左右2本のアーム18が協働してワーク100を支持する構成となっているため、1本のアーム18に作用する重力モーメントが分配される。このため、各アーム18の強度確保が容易となる。また、左右のアーム18を用いてワーク100を四点支持する構成となっているため、関連技術として示したようなワーク100の中心部を一点支持する構成と比べ、支持されるワーク100をバランスよく支持することができるようになり、ワーク100を安定的に昇降させることができるようになる。
【0037】
しかも、アームの基端側は、水平面内を前後に離れて平行に並ぶ第1及び第2アーム19,20によって構成されている。このため、重力モーメントをこの2本のアームに分散させることができ、アーム18の強度確保が更に容易となる。そして、このように前後に離れて並ぶ第1及び第2アーム19,20によって重力モーメントを支持可能となるため、第3アーム21に作用するねじり方向の荷重を軽減することができる。
【0038】
なお、地点Bに設置された昇降装置10を用いて、ハンガーに吊るされているワーク100を第2コンベアライン2上に移し変えるべくワーク100を下降させる際のコントローラ30及びアーム18の動作は、上記上昇時の動作と同様である。このため、上記同様の作用効果を奏する。
【0039】
これまで本発明の実施形態について説明したが、上記構成は本発明の範囲内において適宜変更可能である。例えば本実施形態では、2本のボールネジと2本のアームから構成したが、ボールネジ及びアームの本数はこれに限られず、例えば左右に2本ずつ設けるなど適宜変更可能である。4個の支持点でワークを支持するにあたって左右に2本ずつ合計4個のアームを備えた昇降装置を利用する場合、各アームの先端にはバーを設ける必要がなく、支持点に当接可能な駒部が取り付けられていればよい。また、ハンガー5はワーク100の下面を支持するだけでなく、側面を支持するように構成されていてもよい。本発明に係る昇降装置によって昇降されるワークは重量ワークに限られず、本発明に係る昇降装置は多様な用途に適用され得る。
【産業上の利用可能性】
【0040】
本発明はワークを安定して昇降させることができ、且つワークを搬送するための他の搬送通路と昇降装置とが干渉するのを避けることができるという作用効果を奏し、重量ワーク用の昇降装置に適用すると有益である。
【符号の説明】
【0041】
1,2 コンベアライン(搬送通路)
3 ハンガーライン(搬送通路)
10 昇降装置
11 垂直軸
15 昇降モータ(昇降アクチュエータ)
18 アーム
17 ブロック(平行リンク機構)
19 第1アーム(平行リンク機構)
20 第2アーム(平行リンク機構)
21 第3アーム
22 関節部材(平行リンク機構)
23 第1揺動モータ(揺動アクチュエータ)
24 第2揺動モータ(揺動アクチュエータ)
25 バー
26 駒部(ワーク支持部)
27 保持機構
30 コントローラ
31 昇降制御部
32 揺動制御部
33 昇降ドライバ
34 第1揺動ドライバ
35 第2揺動ドライバ
100 ワーク
【技術分野】
【0001】
本発明は、ワークを昇降させる昇降装置に関する。
【背景技術】
【0002】
従来、様々な生産現場で、ワークを昇降させる昇降装置が利用されている(例えば特許文献1,2参照)。
【0003】
特許文献1は、ワーク載置用のパレットを備えた昇降装置を開示している。この昇降装置によると、パレットが多関節ロボットのアーム先端に固着され、該多関節ロボットの動作に応じて昇降する。
【0004】
特許文献2は、ワークを把持するハンドを備えた昇降装置を開示している。この昇降装置は、一対の垂直部及び一対の水平部からなる矩形枠状のハウジングを備えている。各垂直部には上下に延びるボールネジが内蔵され、ハウジングの枠内には、一対のボールネジに夫々螺合するナット間に架け渡された中空支柱が配置されている。ハンドはこの中空支柱に取り付けられ、ボールネジの回転に応じて中空支柱と共に上下に移動する。ハンドの上下移動を安定させるには各ボールネジに駆動力を同期して入力する必要があるため、ハウジングの下側水平部内では、モータの駆動力を各ボールネジに伝達するためのモータ軸が水平に延在している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−74333号公報
【特許文献2】特開平10−157847号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1に記載の昇降装置によると、1台のロボットで大重量のワークの荷重を支持しなければならず、この荷重に耐え得る強度の確保のためロボットの構造が大型化するおそれがある。更に、パレットの下面重心部がアーム先端に支持されているため、ワークの重心がパレットの下面重心部から偏るとパレットの傾きを招き、ワークを安定的に昇降させることが困難となる。
【0007】
特許文献2に記載の昇降装置はこのような問題を解決し得るが、特許文献2に記載の昇降装置を重量ワークの搬送に流用することは困難である。重量ワークの生産工場に設置される昇降装置は、工場の床部に設置されたコンベアと天井部に設置されたハンガーとの間でワークを搬送するために供されることがあり、特許文献2の記載に従う昇降装置を重量ワークの生産工場に設置すると、ハウジングの下側水平部及びモータ軸がコンベアと干渉するおそれがあるからである。モータ軸を単純に省略すると、ワークを安定して昇降させるために2本のボールネジを同期して回転駆動するための構成を別途付与する必要が生じる。
【0008】
そこで本発明は、ワークを安定して昇降させることができ、且つ該ワークを搬送するための他の搬送通路との干渉を避けることを目的としている。
【課題を解決するための手段】
【0009】
本発明は上記事情に鑑みてなされており、本発明に係る昇降装置は、ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、前記各垂直軸に個別に設けられ、ワークを支持可能な複数のアームと、前記各アームに個別に設けられ、対応するアームを前記垂直軸に沿って昇降させる複数の昇降アクチュエータと、前記各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、前記複数の昇降アクチュエータを駆動制御する昇降制御部と、前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、前記昇降制御部より与えられる指令に基づいて前記各昇降アクチュエータが駆動され、前記揺動制御部より与えられる指令に基づいて前記各揺動アクチュエータが駆動される昇降装置において、前記アームが、前記垂直軸に連結されて水平面内を揺動可能な平行リンク部と、前記平行リンク部に連結されて水平面内を揺動可能な先端部とを有することを特徴としている。
【0010】
このような構成とすることにより、単一の昇降制御部より同時に与えられる指令に基づき各昇降アクチュエータが駆動される構成としたため、複数の昇降アクチュエータの動作の協調性・同期性が高くなる。よって、ワークの昇降を安定的に行わせることができる。また、従来の装置によれば、単一の昇降アクチュエータから出力される駆動力を各アームに伝達するための軸を搬送通路を横切るようにして設ける必要があったが、各アームに個別に昇降アクチュエータを設けたことによって該軸を省略することができ、昇降装置と搬送通路との干渉を避けることができる。また、単一の揺動制御部より与えられる指令に基づき各揺動アクチュエータが駆動される構成ともしているため、複数の揺動アクチュエータの動作の協調性・同期性が高くなる。そして、アームの基端側が平行リンク部を構成しているため、ワークの重力モーメントをこの平行リンク部において分散して受けることができ、先端部に作用するねじり方向の荷重を軽減することができる。
【0011】
前記アームの先端部に連結されて水平面内を揺動可能なバーと、前記バーの両端部に設けられた一対のワーク支持部と、前記アームの姿勢に関わらず前記搬送通路に沿って搬送されるワークに対する前記バーの水平面内における向きを保持する保持機構と、を更に備えていてもよい。これにより、アームの姿勢に関わらず一対のワーク支持部の搬送経路に対する姿勢が変わらなくなるため、アームを動作させてもワーク支持部によりワークを安定して支持することができる。
【発明の効果】
【0012】
このように本発明によれば、ワークを安定的に昇降させることができ、且つワークを搬送するための他の搬送通路と昇降装置とが干渉するのを避けることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係る昇降装置が設置された重量ワークの生産工場のレイアウトの一例を平面視で示す模式図である。
【図2】図1に示す昇降装置の平面図である。
【図3】図1に示す昇降装置の正面図である。
【図4】図1に示す昇降装置の側面図である。
【図5】図1に示す昇降装置の制御系の構成を模式的に示すブロック図である。
【発明を実施するための形態】
【0014】
以下これら図面を参照して本発明の実施形態について説明する。図1に模式的に示す重量ワークの生産工場には、床部に敷設された第1及び第2コンベアライン1,2と、天井部に敷設されたハンガーライン3とが備えられている。第1及び第2コンベアライン1,2に沿ってワーク100が搬送され、ハンガーライン3に沿ってワーク100を吊るすためのハンガー5が搬送される。
【0015】
この工場には、コンベアライン1,2とハンガーライン3との間でワーク100を上昇又は下降させる昇降装置10が備えられている。第1コンベアライン1とハンガーライン3とは所定地点Aにおいて平面視で重なり、第2コンベアライン2とハンガーライン3とは所定地点Bにおいて平面視で重なっている。昇降装置10はこれら2地点A,Bに夫々設置され、ハンガー5はハンガーライン3に沿って地点Aから地点Bへ向かって搬送される。2機の昇降装置10は同様の構成を有しており、地点Aに設置された昇降装置10は第1コンベアライン1に沿って搬送されたワーク100を上昇させるために供され、地点Bに設置された昇降装置10はハンガーライン3に沿って搬送されたワーク100を下降させるために供されている。
【0016】
以下の昇降装置の説明では、2機のうち地点Aに設置された昇降装置10のみ説明し、地点Bに設置された昇降装置10に関する重複説明を省略する。なお、昇降装置10が設置される地点A周辺にて、ライン1,3が延在する方向を「前後方向」、ライン1,3の幅方向を「左右方向」としている。また、平面視においてワーク100の長辺方向がコンベアライン1の延在方向に向けられ、短辺方向がコンベアライン1の幅方向(即ち延在方向と直交する方向)に向けられるものとしている。ハンガー5で吊るされたワーク100の向きとハンガーライン3の向きとの関係もこれと同様としている。
【0017】
図2乃至図4に示すように、昇降装置10は、コンベアライン1を挟むようにして左右に分かれて対向配置された柱11を備えている。各柱11は床面上のベース12に立設する前後一対の壁13を有し、これら壁13で挟まれた空間内をボールネジ14が垂直に延びている。ボールネジ14の両端部は壁13に取り付けられた図示しない軸受で支持され、ボールネジ14はその軸線周りに回転可能であって軸線方向に直動不能となっている。
【0018】
柱11の下部にはボールネジ14の下端に隣接配置された昇降モータ15と、昇降モータ15とボールネジ14の下端との間に設けられた動力伝達機構16とが配設されている。昇降モータ15が動作すると、昇降モータ15の回転駆動力が動力伝達機構16を介してボールネジ14に入力され、ボールネジ14が回転する。
【0019】
ボールネジ14にはブロック17が螺合している。ブロック17は回転不能に取り付けられているため、ボールネジ14が回転するとボールネジ14の軸方向に沿って上方又は下方に直動する。そして、このブロック17には柱11に対してライン1,3が配置されている側に突出するベース17aが固着されており、このベース17aに水平に延在するアーム18が連結されている。ボールネジ14が回転するとブロック17及びベース17aと共にアーム18がボールネジ14の軸方向に沿って昇降するようになっている。
【0020】
アーム18は、第1乃至第3アーム19〜21を備えてなり、第1及び第2アーム19,20の基端部はベース17aに揺動可能に連結され、その先端部は関節部材22に揺動可能に連結されている。この関節部材22には第3アーム21の基端部が揺動可能に連結されている。ベース17a、第1及び第2アーム19,20及び関節部材22は平行リンク機構を構成しており、第1及び第2アーム19,20の回転角度位置に関わらず、関節部材22のベース17aに対する水平面内での姿勢が変化せず、よってコンベアライン1、ハンガーライン3、柱11及びボールネジ14に対する姿勢が変化しない。従って、関節部材22に連結されている第3アーム21の水平面内での姿勢も第1及び第2アーム19,20の回転角度位置に依存しなくなり、第3アーム21の動作制御及び位置制御を容易に行えるようになる。
【0021】
第1アーム19とベース17aとの枢支部には、第1アーム19の基端部に連結された第1揺動モータ23が配設されており、第3アーム21と関節部材22との枢支部には、第3アーム22の基端部に連結された第2揺動モータ24が配設されている。第1揺動モータ23が動作すると、第1アーム19がベース17aとの枢支部となる基端部を中心にしてベース17aに対して揺動し、第2アーム20が第1アーム19と平行に延びる状態を維持しつつ第1アーム19に連れてベース17aに対して揺動する。第2揺動モータ24が動作すると、第3アーム21が関節部材22との枢支部となる基端部を中心にして関節部材22に対して揺動する。
【0022】
このようなアーム18が各ボールネジ14に個別に1つずつ設けられている。各アーム18は水平面内を揺動可能であるが第3アーム21の先端部は常にボールネジ14を基準にしてコンベアライン1及びハンガーライン3が設置されている側に位置している。即ち、左右のアーム18,18は実質的に互いに向き合う方向に延びている。
【0023】
各第3アーム21の先端部にはバー25の中央部が連結されている。バー25は水平に延在すると共に第3アーム21に対して水平面内を揺動可能になっている。第3アーム21及び関節部材22の内部には、第3アーム21の回転角度位置に関わらずバー25の水平面内での姿勢を一定に保持する保持機構27が設けられている。この保持機構27の作用により、バー25の姿勢が常に前後に水平に延びる状態に保持される。即ち、バー25の姿勢は、昇降装置10が設置される地点Aでのライン1,3の延在方向と平行に水平に延びる状態であって、これらライン1,3に沿って搬送されるワーク100の長辺方向と平行に水平に延びる状態に保持される。
【0024】
ここで、ワーク100の下面側には複数の支持点(図示せず)が設けられており、この支持点においてワーク100を下側から支持可能になっている。典型的には合計4個の支持点が、ワーク100下面側の短辺方向両側縁部にて前後に離れて設けられている。昇降装置10は、一対のバー25の両端部、即ち4つの端部には、上方に突設した駒部26が設けられており、この駒部26を支持点に夫々当接させることにより、ワーク100を下側から支持する構成となっている。
【0025】
このようにアーム18を水平面内で揺動可能な構成としたことにより、アーム18の水平面内での動作範囲が広くなる。このようなアーム18の先端にワーク100を支持するための駒部26が設けられているため、ワーク幅(短辺方向の寸法)が異なる複数種のワーク100の夫々に対応してワーク100の支持を行うことができるようになり、汎用性が高くなる。なお、アーム18を伸縮可能に構成することにより、ワーク長(長辺方向の寸法)の異なる複数種のワーク100にも対応することができるようになり、汎用性がより高くなる。
【0026】
図5には昇降装置10の制御系の構成を示すブロック図を示している。昇降装置10はアーム18の動作を制御するコントローラ30を備えている。コントローラ30はアーム18の昇降を制御する昇降制御部31と、アーム18の揺動を制御する揺動制御部32とを備えている。
【0027】
昇降制御部31には2つの昇降ドライバ33が接続されている。各昇降ドライバ33は、各ボールネジ14に個別に設けられている昇降モータ15に夫々対応して設けられている。揺動制御部32には2つの第1揺動ドライバ34と2つの第2揺動ドライバ35とが接続されている。各第1揺動ドライバ34は、各第1アーム19に個別に設けられた第1揺動モータ23に夫々対応して設けられ、各第2揺動ドライバ35は、各第3アーム21に個別に設けられた第2揺動モータ24に夫々対応して設けられている。各昇降ドライバ33は昇降指令部31から入力した動作指令に基づいて自身に対応する昇降モータ15に駆動信号を出力し、該昇降モータ15を駆動する構成となっている。揺動指令部32と各第1揺動ドライバ34と各第1揺動モータ23の関係、及び揺動指令部32と各第2揺動ドライバ35と各第2揺動モータ24の関係もこれと同様である。
【0028】
なお、少なくとも昇降制御部31と昇降ドライバ33とは同一の基板上に設けられており、揺動制御部32と第1及び第2揺動ドライバ34,35とは同一の基板上に設けられている。これによりコントローラ30の構成がコンパクトになっている。但し、昇降制御部31と揺動制御部32とが同一の基板上に設けられていてもよい。
【0029】
本実施形態に係る昇降装置10においては、単一の昇降制御部31から同時に2つの昇降ドライバ33に同等の動作指令が出力されるようになっており、各昇降ドライバ11はこの動作指令に基づいて対応する昇降モータ15を駆動するようになっている。よって、2つの昇降モータ15の動作の同期性が確保され、2つのアーム18の昇降が同期して行われるようになる。このため、ワーク100の昇降を安定して行わせることができる。
【0030】
これと同様に、単一の揺動制御部32から同時に出力される同等の動作指令に基づいて2つの第1揺動モータ23及び2つの第2揺動モータ24が駆動制御される。よって、アーム18の揺動が同期して行われ、昇降装置10の動作を安定して行わせることができる。
【0031】
また、この昇降装置10によると、コントローラ30が収容されるボックスをコンベアライン1と同様に工場の床部に設置した場合、典型的にはボックスがコンベアライン1に対して左右いずれか一方の外側に配置される。このボックスと同じ側に配置された各モータは、床部を這うようにして設けられたケーブルを介してコントローラと接続されることとなる。ボックスと反対側に配置された各モータは、コンベアライン1を超えるようにして設けられたケーブルを介してコントローラ30と接続されることとなる。地点Aに対して下流側においてはワーク100が無く、ケーブルがコンベアライン1上を超えるような配置を簡単に行うことができる。また、ケーブルであれば、従来の装置のように柱11間を直線状に延びるように配置せず、柱11に対してコンベアラインの延在方向に変位した箇所で該コンベアライン1上を超えるような配線レイアウトを容易に行うことができる。このようにして、昇降装置1とライン1〜3との干渉を避けた上でアーム18の動作の同期性を確保することができる。
【0032】
地点Aに設置された昇降装置10を用いてワーク100を上昇する際のコントローラ30及びアーム18の動作を説明する。まず、初期状態では、ブロック17がボールネジ14の下端部において螺合してアーム18が昇降範囲の下限に位置していると共に、アーム18は所定の格納姿勢にある。アーム18が昇降範囲の下限に位置していると、バー25がワーク100の下面よりも下方に位置するようになっている。また、格納姿勢とは、第1乃至第3アーム19〜21が左右方向に真っ直ぐ延在する状態とはなっておらずバー15を柱11寄りに位置させるようなアーム18の姿勢を指す。例えば、第1及び第2アーム19,20と、第3アーム21とが平面視L字形状を成すようにアーム18が折り畳まれた姿勢を指す。
【0033】
コンベアライン1に沿って搬送されるワーク100が地点Aで停止すると、各バー25をコンベアライン1が配置されている側に移動させるようにしてアーム18を揺動し、各バー25をワーク100の下方に位置させる。上記のように単一の揺動制御部32からの動作指令に基づいて2本のバー25を移動させることとなるため、2つのバー25の移動速度及び位置は互いに同じになる。
【0034】
バー25が所定位置になるまでアーム18を揺動させると、アーム18を上昇させる。駒部26には夫々図示しないリミットスイッチが取り付けられ、各駒部26が支持点に当接すると該スイッチからコントローラ30にON信号が出力されるようになっている。コントローラ30は4つのリミットスイッチからのON信号が出力されると、アーム18を更に上昇させる。少なくともこの上昇開始時点で、地点Aではハンガーライン3に沿って搬送されたハンガー5が開状態で待機しており、アーム18を昇降範囲の上限に位置させるとワーク100が開状態のハンガー5内に位置するようになっている。その後、ハンガー5を閉状態とした上で、アーム18を僅かに下降させることにより、ワーク100をハンガー5で支持される状態とする。コントローラ30は、4個のリミットスイッチからOFF信号が出力されていることに基づき、ハンガー5でワーク100が支持された状態になっていることを検知可能となっている。このようにしてワーク100をハンガー5に移し返ると、更にアーム18を僅かに下降させ、アーム18を揺動させて格納姿勢にする。そして、アーム18を昇降範囲の下限まで下降させ、昇降装置10が初期状態に戻る。
【0035】
上記のように単一の昇降制御部31からの動作指令に基づいてアーム18及びバー25を昇降させることとなるため、アーム18及びバー25の昇降速度及び上下位置は互いに同じになる。よって、ワーク100の昇降を安定的に行わせることができる。
【0036】
また、別個のボールネジ14に設けられた左右2本のアーム18が協働してワーク100を支持する構成となっているため、1本のアーム18に作用する重力モーメントが分配される。このため、各アーム18の強度確保が容易となる。また、左右のアーム18を用いてワーク100を四点支持する構成となっているため、関連技術として示したようなワーク100の中心部を一点支持する構成と比べ、支持されるワーク100をバランスよく支持することができるようになり、ワーク100を安定的に昇降させることができるようになる。
【0037】
しかも、アームの基端側は、水平面内を前後に離れて平行に並ぶ第1及び第2アーム19,20によって構成されている。このため、重力モーメントをこの2本のアームに分散させることができ、アーム18の強度確保が更に容易となる。そして、このように前後に離れて並ぶ第1及び第2アーム19,20によって重力モーメントを支持可能となるため、第3アーム21に作用するねじり方向の荷重を軽減することができる。
【0038】
なお、地点Bに設置された昇降装置10を用いて、ハンガーに吊るされているワーク100を第2コンベアライン2上に移し変えるべくワーク100を下降させる際のコントローラ30及びアーム18の動作は、上記上昇時の動作と同様である。このため、上記同様の作用効果を奏する。
【0039】
これまで本発明の実施形態について説明したが、上記構成は本発明の範囲内において適宜変更可能である。例えば本実施形態では、2本のボールネジと2本のアームから構成したが、ボールネジ及びアームの本数はこれに限られず、例えば左右に2本ずつ設けるなど適宜変更可能である。4個の支持点でワークを支持するにあたって左右に2本ずつ合計4個のアームを備えた昇降装置を利用する場合、各アームの先端にはバーを設ける必要がなく、支持点に当接可能な駒部が取り付けられていればよい。また、ハンガー5はワーク100の下面を支持するだけでなく、側面を支持するように構成されていてもよい。本発明に係る昇降装置によって昇降されるワークは重量ワークに限られず、本発明に係る昇降装置は多様な用途に適用され得る。
【産業上の利用可能性】
【0040】
本発明はワークを安定して昇降させることができ、且つワークを搬送するための他の搬送通路と昇降装置とが干渉するのを避けることができるという作用効果を奏し、重量ワーク用の昇降装置に適用すると有益である。
【符号の説明】
【0041】
1,2 コンベアライン(搬送通路)
3 ハンガーライン(搬送通路)
10 昇降装置
11 垂直軸
15 昇降モータ(昇降アクチュエータ)
18 アーム
17 ブロック(平行リンク機構)
19 第1アーム(平行リンク機構)
20 第2アーム(平行リンク機構)
21 第3アーム
22 関節部材(平行リンク機構)
23 第1揺動モータ(揺動アクチュエータ)
24 第2揺動モータ(揺動アクチュエータ)
25 バー
26 駒部(ワーク支持部)
27 保持機構
30 コントローラ
31 昇降制御部
32 揺動制御部
33 昇降ドライバ
34 第1揺動ドライバ
35 第2揺動ドライバ
100 ワーク
【特許請求の範囲】
【請求項1】
ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、
前記各垂直軸に個別に設けられ、ワークを支持可能な複数のアームと、
前記各アームに個別に設けられ、対応するアームを前記垂直軸に沿って昇降させる複数の昇降アクチュエータと、
前記各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、
前記複数の昇降アクチュエータを駆動制御する昇降制御部と、
前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、
前記昇降制御部より与えられる指令に基づいて前記各昇降アクチュエータが駆動され、前記揺動制御部より与えられる指令に基づいて前記各揺動アクチュエータが駆動される昇降装置において、
前記アームが、前記垂直軸に連結されて水平面内を揺動可能な平行リンク部と、前記平行リンク部に連結されて水平面内を揺動可能な先端部とを有することを特徴とする昇降装置。
【請求項2】
前記アームの先端部に連結されて水平面内を揺動可能なバーと、前記バーの両端部に設けられた一対のワーク支持部と、前記アームの姿勢に関わらず前記搬送通路に沿って搬送されるワークに対する前記バーの水平面内における向きを保持する保持機構と、を更に備えることを特徴とする請求項1に記載の昇降装置。
【請求項1】
ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、
前記各垂直軸に個別に設けられ、ワークを支持可能な複数のアームと、
前記各アームに個別に設けられ、対応するアームを前記垂直軸に沿って昇降させる複数の昇降アクチュエータと、
前記各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、
前記複数の昇降アクチュエータを駆動制御する昇降制御部と、
前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、
前記昇降制御部より与えられる指令に基づいて前記各昇降アクチュエータが駆動され、前記揺動制御部より与えられる指令に基づいて前記各揺動アクチュエータが駆動される昇降装置において、
前記アームが、前記垂直軸に連結されて水平面内を揺動可能な平行リンク部と、前記平行リンク部に連結されて水平面内を揺動可能な先端部とを有することを特徴とする昇降装置。
【請求項2】
前記アームの先端部に連結されて水平面内を揺動可能なバーと、前記バーの両端部に設けられた一対のワーク支持部と、前記アームの姿勢に関わらず前記搬送通路に沿って搬送されるワークに対する前記バーの水平面内における向きを保持する保持機構と、を更に備えることを特徴とする請求項1に記載の昇降装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−190094(P2011−190094A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−59719(P2010−59719)
【出願日】平成22年3月16日(2010.3.16)
【出願人】(000000974)川崎重工業株式会社 (1,710)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月16日(2010.3.16)
【出願人】(000000974)川崎重工業株式会社 (1,710)
【Fターム(参考)】
[ Back to top ]