
昇降装置
【課題】本発明は、製造コストを増加させることなく、走行体に掛かる負担を軽減し、被搬送物の搬出入の方向が制限されない昇降装置を提供することを目的とした。
【解決手段】昇降装置1は、被搬送物を載置可能とした2以上の載置部3と、各載置部3が昇降する領域A、Bと、各載置部3を連動して移動させる移動手段5とを有している。各載置部3が昇降する領域A、B同士は水平方向に直列的に隣接して配されており、載置部3が昇降する際には、隣接する領域A、B同士の載置部3が相互に鉛直成分を含む方向に近接・離反する。これにより、隣接する領域A、B同士の載置部3がカウンターバランスの役割を果たすため、無駄がなく合理的である。
【解決手段】昇降装置1は、被搬送物を載置可能とした2以上の載置部3と、各載置部3が昇降する領域A、Bと、各載置部3を連動して移動させる移動手段5とを有している。各載置部3が昇降する領域A、B同士は水平方向に直列的に隣接して配されており、載置部3が昇降する際には、隣接する領域A、B同士の載置部3が相互に鉛直成分を含む方向に近接・離反する。これにより、隣接する領域A、B同士の載置部3がカウンターバランスの役割を果たすため、無駄がなく合理的である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被搬送物を高低差がある位置に搬送する昇降装置に関するものである。
【背景技術】
【0002】
近年、工場や物流センター等では、限られた空間を有効利用するため、昇降装置を用いて、高さ方向に搬送ラインを拡張しているものがある。
【0003】
ところで、昇降装置には、封筒等の軽量物を搬送するタイプのものや、車輌等の重量物を搬送するタイプのものがあるが、いずれのタイプの昇降装置であっても、被搬送物を昇降させる駆動源としてモータが使用されている。特に、重量物を搬送するタイプの昇降装置には、大きな駆動力を備えたモータを要する。しかしながら、大きな駆動力を備えたモータは、製造コストを増加させる要因となり、避けたいという要望がある。
【0004】
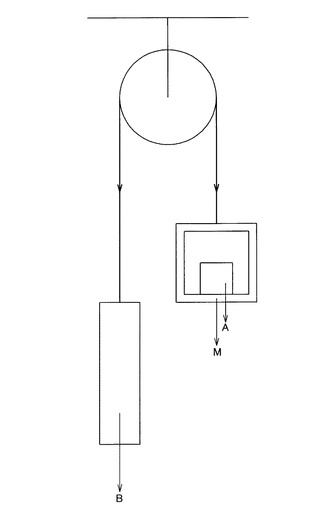
そのため、従来より、この種の昇降装置は、モータの駆動力の補助機能を果たす錘(所謂カウンターバランス)を備え、モータにおける負荷を軽減した構成とされている。例えば、図11に示すように、重量物の重さをA、カウンターバランスの重さをB、重量物を載置する載置部の重さをMとし、B>A、B=A+Mの条件を満たすように設定すれば、理論上、重量物の引き上げ時にモータが要する力はゼロである。
【0005】
即ち、カウンターバランスを具備した昇降装置においては、モータに備えられた能力だけでは、重量物を引き上げることができない場合であっても、カウンターバランスの重さAが、重量物を引き上げる方向に作用するため、モータを単独で使用する場合よりも小さな容量のモータを採用することができる。また、重量物を下方に降ろす場合も同様の作用によりモータに要する力は小さくて済む。即ち、カウンターバランスを採用することで、製造コストを抑えることができる。
例えば、特許文献1には、この技術を利用した昇降装置が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−176098号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、昇降装置にカウンターバランスを設ける場合、図11に示すように、それが配置される場所を確保する必要があるため、昇降装置に対して搬入される方向や、昇降装置から搬出される方向が限定されて使い勝手が悪い。
【0008】
また、この種の昇降装置は、載置部とカウンターバランスを繋ぐチェーン等の走行体に対して、常に載置部の重さに加えて、カウンターバランスの重さが作用するため、走行体の負担が大きく、走行体の劣化が加速度的に進行することが懸念される。
【0009】
そこで、本発明では、製造コストを増加させることなく、走行体に掛かる負担を軽減し、被搬送物の搬出入の方向が制限されない昇降装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するため、請求項1に記載の発明は、被搬送物を昇降手段によって昇降する昇降装置において、昇降手段は、被搬送物を載置可能とした2以上の載置部と、前記2以上の載置部を連動して移動させる移動手段とを有し、各載置部が昇降する領域があり、前記領域は各載置部ごとに備えられると共に前記領域は水平方向に直列的に隣接して配されるものであって、載置部が昇降する際には、隣接する載置部同士が相互に鉛直成分を含む方向に近接・離反することを特徴とする昇降装置である。
なお、ここで言う「被搬送物」とは、物品等に加えて、人を含んだ意味である。
【0011】
本発明の昇降装置は、各載置部が昇降する領域を水平方向に直列的に隣接して配し、移動手段によって、その隣接する載置部同士が相互に鉛直成分を含む方向に近接・離反する構成とされている。即ち、本発明の昇降装置によれば、隣接する領域の載置部を昇降させる際に、隣接する領域の載置部、あるいはその載置部及び載置部に載置された被搬送物が、互いにカウンターバランスの役割を果たすため、わざわざカウンターバランスを設ける必要がない。これにより、本発明の昇降装置においては、移動手段に対して、載置部の重さによる引っ張り力に加えて、常にカウンターバランスの重さによる大きな引っ張り力が発生することはない。即ち、本発明によれば、被搬送物が載置部に載置される場合にのみ、移動手段に大きな引っ張り力が発生するため、移動手段が加速度的に劣化することはない。
【0012】
また、隣接する領域の載置部が互いにカウンターバランスの役割を果たすため、移動手段に、例えばモータ等を設けた場合であっても、カウンターバランスを設けた場合と同様、駆動力が小さいモータを採用することができる。即ち、本発明によれば、カウンターバランスを設けることなく、容量の小さいモータを採用できるため、製造コストを減縮することができる。
また、本発明の昇降装置は、カウンターバランスを配する場所を確保する必要がないため、被搬送物の載置部への進入方向や、載置部からの退出方向が制限され難い。即ち、昇降装置を基準にした搬送前後で、搬送方向が制限されないため、搬送方向に自由度があり、搬送ライン上での昇降装置の配置を選ばない。即ち、工場や配送センター等の空間をより有効的に利用して、搬送ラインを形成することが可能である。
【0013】
請求項2に記載の発明は、前記移動手段は、搬送方向上部側と下部側にそれぞれ配された回転体と、環状に形成され上下に位置する回転体に懸架された走行体を有するものであって、走行体は、1つの載置部を囲むように配され、且つ隣接する領域の載置部の別の走行体に立体的に交差する配置であり、各載置部は、自身を囲む走行体と、隣接する領域の載置部を囲む別の走行体に接続されていることを特徴とする請求項1に記載の昇降装置である。
【0014】
かかる構成によれば、走行体が1つの載置部を囲むように配され、さらに、それぞれの載置部を囲んだ走行体は、隣接する領域の載置部を囲んだ別の走行体に立体的に交差する配置とされており、各載置部は、自身を囲む走行体と、隣接する領域の載置部を囲む別の走行体に接続されているため、載置部を安定的に移動させることができる。具体的には、1つの載置部を基準に走行体を見れば、自身を囲む走行体であって1対の上下方向に延びた部分の一方と、当該領域に隣接する別の領域の載置部を囲む走行体であって1対の上下方向に延びた部分の交差側は、同じ方向に移動することとなるため、載置部を複数点支持しても傾くような不具合が発生しない。即ち、本発明によれば、各載置部を、安定したバランスを維持して移動させることができる。
【0015】
請求項3に記載の発明は、立体的に交差する走行体同士は、交差領域を形成するものであって、当該交差領域において同一の中心軸を有する複数の回転体が回転体群を形成していることを特徴とする請求項2に記載の昇降装置である。
【0016】
かかる構成によれば、走行体同士が形成する交差領域に同一の中心軸を有する複数の回転体が回転体群を形成しているため、当該各回転体を同一の駆動源によって一斉に回転させることで、交差するように配された走行体同士を、連動して移動させることができる。
【0017】
本発明の昇降装置は、前記交差領域に形成された回転体群は、搬送方向上部側と下部側に1組ずつ存在し、少なくとも搬送方向上部側と下部側のいずれかの回転体群は、1つのローラに一体的に接合されており、当該ローラは駆動源を有することが望ましい。(請求項4)
【0018】
請求項5に記載の発明は、載置部の移動方向を規制する案内手段を有することを特徴とする請求項1乃至4のいずれかに記載の昇降装置である。
【0019】
かかる構成によれば、載置部の移動が案内手段によって規制されるため、安定したバランスを維持して昇降動作を行うことができる。
【発明の効果】
【0020】
本発明の昇降装置では、各載置部が昇降する領域を水平方向に直列的に隣接して配し、載置部が昇降する際に、隣接する領域の載置部同士が相互に近接・離反するように構成されているため、カウンターバランスを設けることなくカウンターバランスを設けた場合と同様の効果を得ることができる。即ち、駆動力の小さい駆動源を採用できるため、製造コストを抑えることができる。
また、本発明の昇降装置は、カウンターバランスを設ける必要がないため、被搬送物の進入・退出方向が制限されることがない。
また、本発明の昇降装置は、走行体に常に大きな引っ張り力が生じることがないため、走行体が加速度的に劣化する不具合がない。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る昇降装置を備えた搬送ラインの一部を示す説明図である。
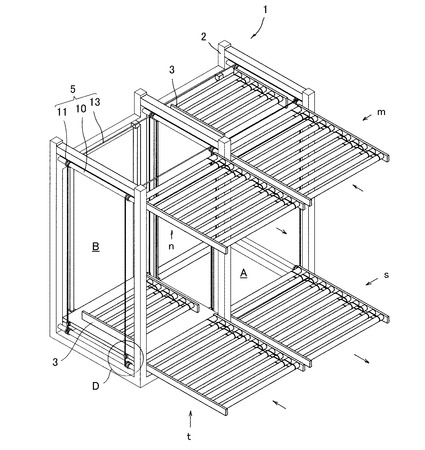
【図2】図1の昇降装置を示す斜視図である。
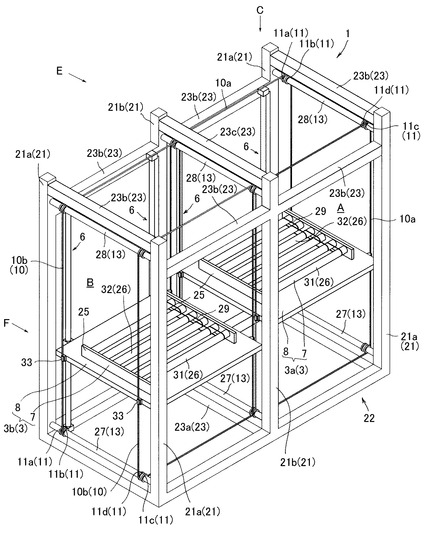
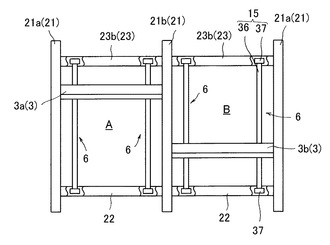
【図3】図2の昇降装置のC方向矢視図である。
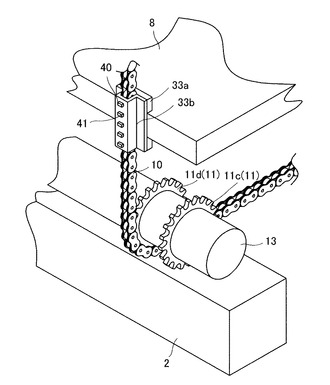
【図4】図1のD部分における走行体と支持部を接続する接続部を示す拡大斜視図である。
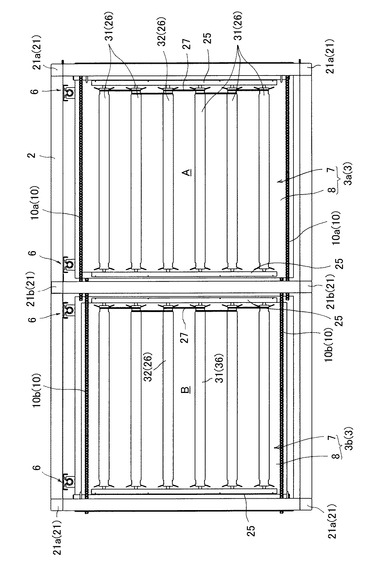
【図5】図2の昇降装置のE方向矢視図である。
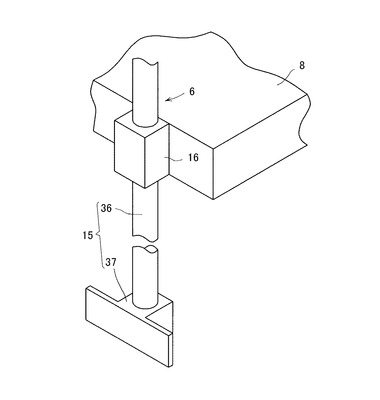
【図6】図2のF方向から見たガイド部材を示す拡大斜視図である。
【図7】昇降装置に被搬送物が搬入される直前の状況を示す説明図である。
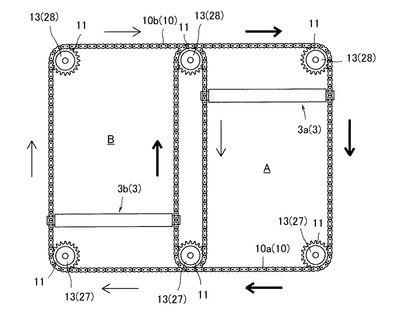
【図8】図7の水平搬送ラインの搬入方向から見た移動手段の動作を概念的に示した説明図である。(太線矢印:第1領域の載置部を囲む走行体の移動方向、細線矢印:第2領域の載置部を囲む走行体の移動方向)
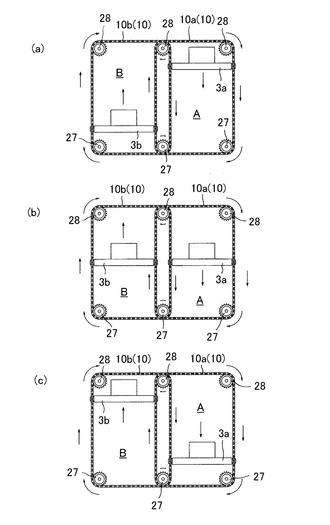
【図9】移動手段と載置部の動作を段階的(a)、(b)、(c)に示した説明図である。
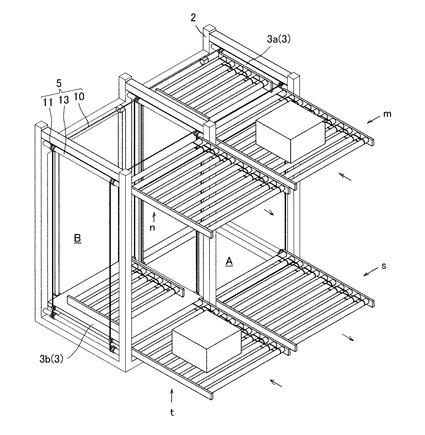
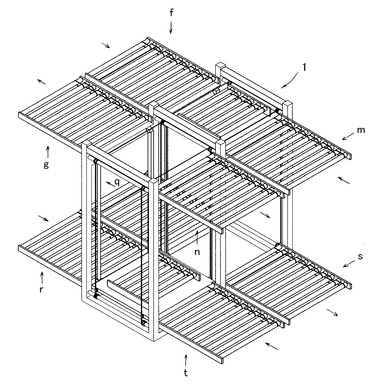
【図10】別の実施形態に係る昇降装置を示す斜視図である。
【図11】従来技術の昇降装置の概念図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態に係る昇降装置1について詳細に説明する。
なお、以下の説明においては、上下左右の位置関係は、特に断りのない限り、図面を基準に説明する。
【0023】
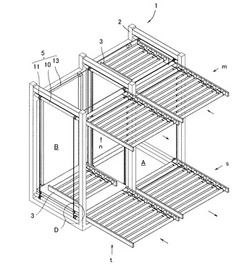
本実施形態の昇降装置1は、図1に示すように、水平方向に延びる水平搬送ラインm、tから被搬送物を受け入れ、鉛直上下方向にその被搬送物を搬送し、別の水平搬送ラインn、sに搬送することができる装置である。
即ち、昇降装置1は、高低差のある水平搬送ラインを繋ぐ程度の大きさを備えた骨格部2と、被搬送物が載置される2系統の載置部3と、双方の載置部3を連動して移動させる移動手段5と、載置部3の移動方向を鉛直上下方向に規制するガイド部材(案内手段)6とで構成されている。
【0024】
骨格部2は、外観が直方体状のラックで、ラックの各骨部は、断面形状が方形の金属製のパイプ(所謂角パイプ)が採用されている。具体的には、骨格部2は、鉛直方向に延びた柱部21と、柱部21を支持するように一体的に接合された底枠部22と、全体の剛性を確保するように柱部21に一体的に接合された梁部23とによって構成されている。
【0025】
底枠部22は、床面に沿って長方形を形成するように配されている。そして、その底枠部22の長方形の各頂点に、鉛直方向に延伸するように柱部(頂点柱部21aとも称す)21が接合されている。また、底枠部22の長手側辺のほぼ中央には、別の柱部(中央柱部21bとも称す)21がそれぞれ1本ずつ接合されている。即ち、本実施形態では、合計6本の柱部21が底枠部22に接合され、柱部21の各頂点を結ぶと、2つの正方形が形成される配置である。
【0026】
また、底枠部22の長手側辺のほぼ中央には、当該長手側辺同士を結ぶように、1本の梁部(底側梁部23aとも称す)23が接合されている。
また、柱部21の上部側には、底枠部22を形成する各辺とほぼ平行な関係となるように、6本の梁部(上側外梁部23bとも称す)23が柱部21に接合されている。さらに、柱部21の上部側には、底側梁部23aとほぼ平行な関係となるように、1本の梁部(上側梁部23cとも称す)23が2つの中央柱部21bの間に接合されている。
なお、以下の説明においては、理解を容易にするために、2本の頂点柱部21aと、2本の中央柱部21bによって囲まれた2つの領域のうちの一方(図2の右側)を第1領域A、他方(図2の左側)を第2領域Bとする。
【0027】
載置部3は、被搬送物を水平方向に搬送するコンベアユニット7と、そのコンベアユニット7を固定する支持部8とによって構成されている。
コンベアユニット7は、平行に配置された1対のサイドフレーム25間に被搬送物を搬送する複数の搬送ローラ26を、搬送方向に所定間隔で軸支されたものである。
【0028】
搬送ローラ26は、自由に回転する従動ローラ31と、駆動用モータを内蔵したモータ内蔵ローラ32とからなる。そして、コンベアユニット7内では、互いに隣接する搬送ローラ26同士が伝動ベルト29で巻回されている。即ち、モータ内蔵ローラ32の回転駆動力を、全ての従動ローラ31に伝動することができる。
なお、本実施形態では、1対のサイドフレーム25に5本の従動ローラ31と、1本のモータ内蔵ローラ32が軸支されており、搬送方向一方の外側から3つ目(搬送方向他方の外側から4つ目)にモータ内蔵ローラ32が配されている。
【0029】
支持部8は、コンベアユニット7を固定するものであり、さらに後述する移動手段5の走行体10が接続されると共にガイド部材6の可動部が固定されるものである。具体的には、支持部8は、ほぼ正方形の板部材であり、支持部8の上部にコンベアユニット7のサイドフレーム25の底部が、ボルト等の接続手段によって固定される。
【0030】
また、本実施形態では、支持部8の1対の辺部に、走行体10が接続される接続部33がそれぞれ2箇所ずつ設けられている。接続部33は、図4に示すように、支持部8と一体的に形成された接続本体部33aと、接続本体部33aと組み合わさって走行体10を挟み込む接続補助部33bとで構成されている。
接続補助部33bには、部材の厚み方向に貫通した係合孔40が設けられている。
接続本体部33aには、チェーンの隙間に挿通され、接続補助部33bの係合孔40に係合する係合突起41が設けられている。なお、係合突起41の突端部には、返しが形成されている。
【0031】
移動手段5は、図2、4に示すように、4条の長尺状の走行体10と、それぞれの走行体10が懸架される回転体11と、その回転体11が一体的に接合された6本の金属製のローラ13とで構成されている。
走行体10は、公知の長尺状のチェーンが採用されており、そのチェーンを環状に形成したものである。
本実施形態では、ローラ13として、3本の従動ローラ27と、駆動用モータ(駆動源)を内蔵した3本のモータ内蔵ローラ28が採用されている。
回転体11は、走行体10に回転を伝動する公知のスプロケットであり、ローラ13の長手方向両端部に2つずつ接合されている。即ち、同一のローラ13に一体的に接合された4つの回転体11は、同一の中心軸を有した回転体群を形成している。
本実施形態では、1条の走行体10に対して、4つの回転体11が噛み合って、走行体10をほぼ四角形の環状に形成している。そして、そのうちの2つの回転体11は、モータ内蔵ローラ28に接合されたものが採用されている。
【0032】
ガイド部材6は、公知の直動案内ガイドであり、図5、6に示すように、レール部15と、レール部15に沿って滑走する可動部16とで構成されている。
レール部15は、金属により構成されており、滑走部36と、その滑走部36の両端に設けられた固定部37とで構成されている。滑走部36は、断面形状が円形の長尺状の部分であり、固定部37は、ネジ等の接続手段を用いて骨格部2の上下に固定される部分である。
可動部16は、載置部3の支持部8に固定されるもので、滑走部36が挿通される貫通孔を有し、その貫通孔で滑走部36を保持して移動する部分である。
即ち、ガイド部材6は、骨格部2に固定されたレール部15に対して、可動部16が滑走部36に沿って相対的に移動する部材である。
【0033】
次に、本実施形態の昇降装置1における各部材間の組み合わせ構造について説明する。
本実施形態の昇降装置1は、図1に示すように、上部水平搬送ラインm、n及び下部水平搬送ラインs、tに対して、搬出入できるように配置されている。具体的には、昇降装置1における第1領域Aが、上部水平搬送ラインmと下部水平搬送ラインsの間に配され、第2領域Bが、上部水平搬送ラインnと下部水平搬送ラインtの間に配されている。即ち、上部水平搬送ラインm又は下部水平搬送ラインsから搬入された被搬送物は、第1領域Aに搬入され、上部水平搬送ラインn又は下部水平搬送ラインtから搬送された被搬送物は、第2領域Bに搬入される配置である。換言すれば、第1領域Aに搬入された被搬送物は、上部水平搬送ラインm又は下部水平搬送ラインsに搬出され、第2領域Bに搬入された被搬送物は、上部水平搬送ラインn又は下部水平搬送ラインtに搬出される配置である。
【0034】
昇降装置1における第1領域Aと第2領域Bは、図2に示すように、隣接した位置関係で、この隣接した2つの領域A、Bに跨るように移動手段5が設けられている。
第1領域Aについて説明すると、2本の中央柱部21bの間に2本のローラ13が軸支され、さらにその中央柱部21bの間に設けられたローラ13と平行且つ2本の頂点柱部21aの間に2本のローラ13が軸支されている。
【0035】
より詳細に説明すると、第1領域Aにおいては、各柱部21に配された2本のローラ13は、1つがモータ内蔵ローラ28であり柱部21の上側に配され、別の1つが従動ローラ27であり柱部21の下側に配されている。即ち、本実施形態では、第1領域Aにおいては、骨格部2の上側に配された2本のローラ13は、全てモーラ内蔵ローラ28であり、下側に配された2本のローラ13は、全て従動ローラ27である。
【0036】
第2領域Bについても、第1領域Aとほぼ同様である。即ち、第2領域Bでは、骨格部2の上側に配された2本のローラ13が、全てモータ内蔵ローラ28であり、下側に配された2本のローラ13は、全て従動ローラ27である。
なお、2本の中央柱部21bの間に配された2本のローラ13は、第1領域Aと第2領域Bで共有するローラである。そのため、第1領域Aと第2領域Bのローラ13の合計本数は6本で、その内訳は、骨格部2の下側に配された3本の従動ローラ27と、骨格部2の上側に配された3本のモータ内蔵ローラ28である。
【0037】
そして、各ローラ13に接合されたそれぞれの回転体11は、隣合ったローラ13のいずれかの回転体11とほぼ同一の平面上に存在する配置とされている。
ここで、理解を容易にするため、以下の説明においては、水平搬送ラインm、n、s、tが配された側を手前、対向する側を奥とし、ローラ13の長手方向奥側の端部側に位置する2つの回転体11のうち、ローラ13の端部に近い側を奥外回転体11a、その奥外回転体11aより手前側を奥内回転体11bとし、さらにローラ13の長手方向手前側の端部側に位置する2つの回転体11のうち、ローラ13の端部に近い側を前外回転体11c、その前外回転体11cより奥側を前内回転体11dとして説明する。
【0038】
即ち、第1領域Aの奥側では、4本のローラ13の奥外回転体11aはそれぞれほぼ同一の平面上に存在する配置であり、またその4本のローラ13の奥内回転体11bもそれぞれほぼ同一の平面(前記した奥外回転体11aの平面とは別の平面)上に存在する配置である。そして、第1領域Aの手前側では、4本のローラ13の前外回転体11cはそれぞれほぼ同一の平面上に存在する配置であり、またその4本のローラ13の前内回転体11dもそれぞれほぼ同一の平面(前記した前外回転体11cの平面とは別の平面)上に存在する配置である。
【0039】
また、第2領域Bについても、第1領域Aと同様である。即ち、奥側では、4本のローラ13の奥外回転体11aはそれぞれほぼ同一の平面上に存在する配置であり、またその4本のローラ13の奥内回転体11bもそれぞれほぼ同一の平面(前記した奥外回転体11aの平面とは別の平面)上に存在する配置である。そして、第2領域Bの手前側では、4本のローラ13の前外回転体11cはそれぞれほぼ同一の平面上に存在する配置であり、またその4本のローラ13の前内回転体11dもそれぞれほぼ同一の平面(前記した前外回転体11cの平面とは別の平面)上に存在する配置である。
また、前記したように、2本の中央柱部21bの間に配された2本のローラ13は、第1領域Aと第2領域Bで共有するローラであるため、全てのローラ13における奥外回転体11aと奥内回転体11bと前外回転体11cと前内回転体11dはそれぞれほぼ同一の平面上に存在する配置と言える。
【0040】
そして、各走行体10は、合計4つの回転体11と噛み合うように懸架されている。本実施形態では、各走行体10が懸架されるいずれかの回転体11が、中央柱部21bに軸支されたローラ13に設けられた回転体11とされている。
具体的には、第1領域A側では、4つの奥外回転体11a及び4つの前外回転体11cに走行体10aが1条ずつ懸架されており、第2領域B側では、4つの奥内回転体11b及び4つの前内回転体11dに走行体10bが1条ずつ懸架されている。即ち、第1領域A側の走行体10aと、第2領域B側の走行体10bは、互いに同一の平面に存在することはなく、中央柱部21bの位置で立体的に交差する関係である。換言すると、中央柱部21bに軸支されたローラ13は、第1領域A側の走行体10aと、第2領域B側の走行体10bが立体交差して形成された交差領域に存在し、そのローラ13の回転体11に各走行体10a、10bが懸架されている。
【0041】
また、各領域A、Bでは、ガイド部材6が、一定の間隔を空けて2箇所ずつ設けられている。ガイド部材6は、レール部15が柱部21と平行になるように、レール部15の固定部37を介して、骨格部2の上側外梁部23b及び底枠部22に固定されている。なお、本実施形態では、各領域A、Bにおける2箇所のレール部15は、図1に示す被搬送物の搬出入口と対向する側の上側外梁部23b及び底枠部22に固定されている。
【0042】
また、各領域A、Bにおける載置部3は、自身の領域を囲む走行体10と、隣接する領域の載置部3を囲む走行体10に接続されている。
即ち、第1領域Aにおける載置部3aは、図2に示すように、頂点柱部21a側が奥外回転部11a及び前外回転部11cに懸架された走行体10aに接続され、さらに中間柱部21b側が奥内回転部b及び前内回転部11dに懸架された走行体10bに接続されている。第2領域Bにおける載置部3bは、頂点柱部21a側が奥内回転部11b及び前内回転部11dに懸架された走行体10bに接続され、さらに中間柱部21b側が奥外回転部11a及び前外回転部11cに懸架された走行体10aに接続されている。換言すると、各領域A、Bにおける載置部3は、全てのローラ13が同一方向に回転する際に、それぞれ同一方向に移動する走行体10に接続されている。これにより、各載置部3は複数点支持されつつも、全てのローラ13が同一方向に回転すれば、第1領域Aの載置部3aと、第2領域Bの載置部3bは相互に近接・離反する方向に移動する。
【0043】
さらに、支持部8には、ガイド部材6の可動部16が固定されている。具体的には、可動部16は、固定部37を介して、支持部8の側部に固定されている。即ち、載置部3は、ガイド部材6のレール部15に沿って、安定したバランスで鉛直上下方向にのみ移動することができる。
また、本実施形態では、載置部3のコンベアユニット7の搬送方向が、走行体10が形成する平面を直交する方向に配置されている。
【0044】
次に、本実施形態の昇降装置1の動作について説明する。
本実施形態の昇降装置1は、異なる高さから2つの被搬送物を受け入れ、受け入れた2つの被搬送物の高さを反転させるように搬送する装置である。即ち、本実施形態の昇降装置1は、移動手段5により、2つの載置部3を相互に近接・離反させて、被搬送物を搬送する。
なお、以下の説明においては、第1領域Aの載置部3aの搬入待機位置を上部水平搬送ラインmと同じ高さとし、第2領域Bの載置部3bの搬入待機位置を下部水平搬送ラインtと同じ高さとする。
【0045】
第1領域A及び第2領域Bが、搬入待機位置であって、昇降装置1より搬送方向上流側で被搬送物が検知されれば、被搬送物を載置部3に受け入れる。具体的には、図7に示すように、昇降装置1の直前の図示しない在荷センサが、被搬送物を検知すれば、昇降装置1のコンベアユニット7のローラ26を駆動する。そして、昇降装置1における図示しない在荷センサによって、上部水平搬送ラインm及び下部水平搬送ラインtからの搬入が確認されると、コンベアユニット7のローラ26を停止して、各載置部3が昇降移動するように制御される。
【0046】
即ち、各載置部3で被搬送物の搬入が確認されると、被搬送物を昇降させるために、移動手段5の全てのモータ内蔵ローラ28が同一方向に回転するように駆動される。具体的には、図8に示すように、各モータ内蔵ローラ28は、搬入方向から見て時計周りに回転し、さらにこの動作に伴って、従動ローラ27も同じ方向に回転する。これにより、回転体11に懸架された走行体10が時計周り(図8)に移動するため、走行体10に接続された載置部3が移動する。
【0047】
ここで、各領域A、Bの載置部3a、3bは、自身を囲む走行体10と、隣接する領域の載置部3を囲む走行体10に接続されているため、各載置部3a、3bは複数点支持されつつも、連動して移動する。
【0048】
即ち、第1領域Aにおける載置部3aは、図9に示すように、下方に向かって移動し、第2領域Bにおける載置部3bは上方に向かって移動する。換言すると、隣接する載置部3同士は、相互に近接・離反する方向に移動し、そして、図9(c)に示すように、各載置部3a、3bの鉛直方向の位置が搬入待機位置からほぼ反転する位置に到達すると停止する。
そして、各載置部3a、3bが昇降動作を終えると、各載置部3a、3bのコンベアユニット7のローラ26を搬入時とは逆方向に駆動して、水平搬送ラインs、nに被搬送物を搬出する。
なお、このとき、各水平搬送ラインs、nにおけるローラも駆動される。
【0049】
以上のように、本実施形態では、各領域A、Bにおける載置部3a、3bが連動して昇降する機構を備えているため、いずれか一方の載置部3がカウンターバランスの役割として機能する。即ち、カウンターバランスの機能を担う部分が被搬送物を搬送することができるため、無駄がない。これにより、カウンターバランスを備えた昇降装置と同様、移動手段5に用いるローラ13におけるモータの駆動力を小さくできるため、製造コストを抑えることができる。
【0050】
また、本実施形態によれば、カウンターバランスを設ける場所を確保する必要がないため、水平搬送ラインの配置に自由度がある。即ち、例えば、図10に示すように、図1の水平搬送ラインm、n、s、tに加えて、ガイド部材6が配置された側に、別の水平搬送ラインf、g、q、rを接続することが可能である。また、被搬送物を直角に搬送できる公知の直角移載装置を載置部に採用すれば、さらに別の搬送ラインを接続することもできる。
【0051】
さらに、本実施形態の昇降装置1によれば、被搬送物が載置されなければ、必要以上の引っ張り力が走行体10に掛かることがないため、走行体10が加速度的に劣化する不具合がない。
【0052】
また、上記実施形態では、隣接した載置部3の双方に被搬送物を載置して昇降する動作を示したが、例えば、一方の載置部3に被搬送物を載せ、他方の載置部3には被搬送物を載せない状態で、昇降動作を実行しても構わない。
【0053】
上記実施形態では、同一の中心軸を有する複数の回転体11を1本のローラ13に一体的に接合する構成を示したが、本発明はこれに限定されるわけではなく、例えば、同一の中心軸を有する回転体11を複数のローラに分けて接合しても構わない。具体的には、上記実施形態に示したローラ13の長手方向中間部分がなく、長手方向端部側のみを残した構成である。ただし、この構成のローラは全ての箇所に使用すると、ローラの回転速度を一定に維持できない場合に、走行体10に不具合が発生し兼ねないので、例えば、従動側にのみ使用するなどの方法をとることで有効的なものとなる。即ち、上記実施形態よりも簡単に製造することができると共に、材料コストを抑えることができるため、製造コストを下げることができる。
【0054】
上記実施形態では、2つの載置部3を備え、各載置部3が昇降する領域が水平方向に直列的に隣接するような配置とした構成を示したが、本発明はこれに限定されるわけではなく、3つ以上の載置部3を備え、各載置部3が昇降する領域が水平方向に直列的に隣接させた構成であっても構わない。
【0055】
上記実施形態では、骨格部2の上部に位置するローラ13を全てモータ内蔵ローラ28とした構成を示したが、本発明はこれに限定されず、例えば、中央柱部21bに軸支されるローラのみをモータ内蔵ローラ28としても構わない。この構成によれば、上記実施形態より容量の大きいモータが内蔵されたローラを使用することが望ましい。
【0056】
上記実施形態では、骨格部2における剛性を確保するために、梁部23を最大限備えた構成を示したが、本発明はこれに限定されず、例えば、2本の中央柱部21bの間に設けた底部梁部23aや上側梁部23c等を設けない構成であっても構わない。
【符号の説明】
【0057】
1 昇降装置
3 載置部
5 移動手段
6 ガイド部材(案内手段)
10 走行体
11 回転体
13 ローラ
【技術分野】
【0001】
本発明は、被搬送物を高低差がある位置に搬送する昇降装置に関するものである。
【背景技術】
【0002】
近年、工場や物流センター等では、限られた空間を有効利用するため、昇降装置を用いて、高さ方向に搬送ラインを拡張しているものがある。
【0003】
ところで、昇降装置には、封筒等の軽量物を搬送するタイプのものや、車輌等の重量物を搬送するタイプのものがあるが、いずれのタイプの昇降装置であっても、被搬送物を昇降させる駆動源としてモータが使用されている。特に、重量物を搬送するタイプの昇降装置には、大きな駆動力を備えたモータを要する。しかしながら、大きな駆動力を備えたモータは、製造コストを増加させる要因となり、避けたいという要望がある。
【0004】
そのため、従来より、この種の昇降装置は、モータの駆動力の補助機能を果たす錘(所謂カウンターバランス)を備え、モータにおける負荷を軽減した構成とされている。例えば、図11に示すように、重量物の重さをA、カウンターバランスの重さをB、重量物を載置する載置部の重さをMとし、B>A、B=A+Mの条件を満たすように設定すれば、理論上、重量物の引き上げ時にモータが要する力はゼロである。
【0005】
即ち、カウンターバランスを具備した昇降装置においては、モータに備えられた能力だけでは、重量物を引き上げることができない場合であっても、カウンターバランスの重さAが、重量物を引き上げる方向に作用するため、モータを単独で使用する場合よりも小さな容量のモータを採用することができる。また、重量物を下方に降ろす場合も同様の作用によりモータに要する力は小さくて済む。即ち、カウンターバランスを採用することで、製造コストを抑えることができる。
例えば、特許文献1には、この技術を利用した昇降装置が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−176098号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、昇降装置にカウンターバランスを設ける場合、図11に示すように、それが配置される場所を確保する必要があるため、昇降装置に対して搬入される方向や、昇降装置から搬出される方向が限定されて使い勝手が悪い。
【0008】
また、この種の昇降装置は、載置部とカウンターバランスを繋ぐチェーン等の走行体に対して、常に載置部の重さに加えて、カウンターバランスの重さが作用するため、走行体の負担が大きく、走行体の劣化が加速度的に進行することが懸念される。
【0009】
そこで、本発明では、製造コストを増加させることなく、走行体に掛かる負担を軽減し、被搬送物の搬出入の方向が制限されない昇降装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するため、請求項1に記載の発明は、被搬送物を昇降手段によって昇降する昇降装置において、昇降手段は、被搬送物を載置可能とした2以上の載置部と、前記2以上の載置部を連動して移動させる移動手段とを有し、各載置部が昇降する領域があり、前記領域は各載置部ごとに備えられると共に前記領域は水平方向に直列的に隣接して配されるものであって、載置部が昇降する際には、隣接する載置部同士が相互に鉛直成分を含む方向に近接・離反することを特徴とする昇降装置である。
なお、ここで言う「被搬送物」とは、物品等に加えて、人を含んだ意味である。
【0011】
本発明の昇降装置は、各載置部が昇降する領域を水平方向に直列的に隣接して配し、移動手段によって、その隣接する載置部同士が相互に鉛直成分を含む方向に近接・離反する構成とされている。即ち、本発明の昇降装置によれば、隣接する領域の載置部を昇降させる際に、隣接する領域の載置部、あるいはその載置部及び載置部に載置された被搬送物が、互いにカウンターバランスの役割を果たすため、わざわざカウンターバランスを設ける必要がない。これにより、本発明の昇降装置においては、移動手段に対して、載置部の重さによる引っ張り力に加えて、常にカウンターバランスの重さによる大きな引っ張り力が発生することはない。即ち、本発明によれば、被搬送物が載置部に載置される場合にのみ、移動手段に大きな引っ張り力が発生するため、移動手段が加速度的に劣化することはない。
【0012】
また、隣接する領域の載置部が互いにカウンターバランスの役割を果たすため、移動手段に、例えばモータ等を設けた場合であっても、カウンターバランスを設けた場合と同様、駆動力が小さいモータを採用することができる。即ち、本発明によれば、カウンターバランスを設けることなく、容量の小さいモータを採用できるため、製造コストを減縮することができる。
また、本発明の昇降装置は、カウンターバランスを配する場所を確保する必要がないため、被搬送物の載置部への進入方向や、載置部からの退出方向が制限され難い。即ち、昇降装置を基準にした搬送前後で、搬送方向が制限されないため、搬送方向に自由度があり、搬送ライン上での昇降装置の配置を選ばない。即ち、工場や配送センター等の空間をより有効的に利用して、搬送ラインを形成することが可能である。
【0013】
請求項2に記載の発明は、前記移動手段は、搬送方向上部側と下部側にそれぞれ配された回転体と、環状に形成され上下に位置する回転体に懸架された走行体を有するものであって、走行体は、1つの載置部を囲むように配され、且つ隣接する領域の載置部の別の走行体に立体的に交差する配置であり、各載置部は、自身を囲む走行体と、隣接する領域の載置部を囲む別の走行体に接続されていることを特徴とする請求項1に記載の昇降装置である。
【0014】
かかる構成によれば、走行体が1つの載置部を囲むように配され、さらに、それぞれの載置部を囲んだ走行体は、隣接する領域の載置部を囲んだ別の走行体に立体的に交差する配置とされており、各載置部は、自身を囲む走行体と、隣接する領域の載置部を囲む別の走行体に接続されているため、載置部を安定的に移動させることができる。具体的には、1つの載置部を基準に走行体を見れば、自身を囲む走行体であって1対の上下方向に延びた部分の一方と、当該領域に隣接する別の領域の載置部を囲む走行体であって1対の上下方向に延びた部分の交差側は、同じ方向に移動することとなるため、載置部を複数点支持しても傾くような不具合が発生しない。即ち、本発明によれば、各載置部を、安定したバランスを維持して移動させることができる。
【0015】
請求項3に記載の発明は、立体的に交差する走行体同士は、交差領域を形成するものであって、当該交差領域において同一の中心軸を有する複数の回転体が回転体群を形成していることを特徴とする請求項2に記載の昇降装置である。
【0016】
かかる構成によれば、走行体同士が形成する交差領域に同一の中心軸を有する複数の回転体が回転体群を形成しているため、当該各回転体を同一の駆動源によって一斉に回転させることで、交差するように配された走行体同士を、連動して移動させることができる。
【0017】
本発明の昇降装置は、前記交差領域に形成された回転体群は、搬送方向上部側と下部側に1組ずつ存在し、少なくとも搬送方向上部側と下部側のいずれかの回転体群は、1つのローラに一体的に接合されており、当該ローラは駆動源を有することが望ましい。(請求項4)
【0018】
請求項5に記載の発明は、載置部の移動方向を規制する案内手段を有することを特徴とする請求項1乃至4のいずれかに記載の昇降装置である。
【0019】
かかる構成によれば、載置部の移動が案内手段によって規制されるため、安定したバランスを維持して昇降動作を行うことができる。
【発明の効果】
【0020】
本発明の昇降装置では、各載置部が昇降する領域を水平方向に直列的に隣接して配し、載置部が昇降する際に、隣接する領域の載置部同士が相互に近接・離反するように構成されているため、カウンターバランスを設けることなくカウンターバランスを設けた場合と同様の効果を得ることができる。即ち、駆動力の小さい駆動源を採用できるため、製造コストを抑えることができる。
また、本発明の昇降装置は、カウンターバランスを設ける必要がないため、被搬送物の進入・退出方向が制限されることがない。
また、本発明の昇降装置は、走行体に常に大きな引っ張り力が生じることがないため、走行体が加速度的に劣化する不具合がない。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る昇降装置を備えた搬送ラインの一部を示す説明図である。
【図2】図1の昇降装置を示す斜視図である。
【図3】図2の昇降装置のC方向矢視図である。
【図4】図1のD部分における走行体と支持部を接続する接続部を示す拡大斜視図である。
【図5】図2の昇降装置のE方向矢視図である。
【図6】図2のF方向から見たガイド部材を示す拡大斜視図である。
【図7】昇降装置に被搬送物が搬入される直前の状況を示す説明図である。
【図8】図7の水平搬送ラインの搬入方向から見た移動手段の動作を概念的に示した説明図である。(太線矢印:第1領域の載置部を囲む走行体の移動方向、細線矢印:第2領域の載置部を囲む走行体の移動方向)
【図9】移動手段と載置部の動作を段階的(a)、(b)、(c)に示した説明図である。
【図10】別の実施形態に係る昇降装置を示す斜視図である。
【図11】従来技術の昇降装置の概念図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態に係る昇降装置1について詳細に説明する。
なお、以下の説明においては、上下左右の位置関係は、特に断りのない限り、図面を基準に説明する。
【0023】
本実施形態の昇降装置1は、図1に示すように、水平方向に延びる水平搬送ラインm、tから被搬送物を受け入れ、鉛直上下方向にその被搬送物を搬送し、別の水平搬送ラインn、sに搬送することができる装置である。
即ち、昇降装置1は、高低差のある水平搬送ラインを繋ぐ程度の大きさを備えた骨格部2と、被搬送物が載置される2系統の載置部3と、双方の載置部3を連動して移動させる移動手段5と、載置部3の移動方向を鉛直上下方向に規制するガイド部材(案内手段)6とで構成されている。
【0024】
骨格部2は、外観が直方体状のラックで、ラックの各骨部は、断面形状が方形の金属製のパイプ(所謂角パイプ)が採用されている。具体的には、骨格部2は、鉛直方向に延びた柱部21と、柱部21を支持するように一体的に接合された底枠部22と、全体の剛性を確保するように柱部21に一体的に接合された梁部23とによって構成されている。
【0025】
底枠部22は、床面に沿って長方形を形成するように配されている。そして、その底枠部22の長方形の各頂点に、鉛直方向に延伸するように柱部(頂点柱部21aとも称す)21が接合されている。また、底枠部22の長手側辺のほぼ中央には、別の柱部(中央柱部21bとも称す)21がそれぞれ1本ずつ接合されている。即ち、本実施形態では、合計6本の柱部21が底枠部22に接合され、柱部21の各頂点を結ぶと、2つの正方形が形成される配置である。
【0026】
また、底枠部22の長手側辺のほぼ中央には、当該長手側辺同士を結ぶように、1本の梁部(底側梁部23aとも称す)23が接合されている。
また、柱部21の上部側には、底枠部22を形成する各辺とほぼ平行な関係となるように、6本の梁部(上側外梁部23bとも称す)23が柱部21に接合されている。さらに、柱部21の上部側には、底側梁部23aとほぼ平行な関係となるように、1本の梁部(上側梁部23cとも称す)23が2つの中央柱部21bの間に接合されている。
なお、以下の説明においては、理解を容易にするために、2本の頂点柱部21aと、2本の中央柱部21bによって囲まれた2つの領域のうちの一方(図2の右側)を第1領域A、他方(図2の左側)を第2領域Bとする。
【0027】
載置部3は、被搬送物を水平方向に搬送するコンベアユニット7と、そのコンベアユニット7を固定する支持部8とによって構成されている。
コンベアユニット7は、平行に配置された1対のサイドフレーム25間に被搬送物を搬送する複数の搬送ローラ26を、搬送方向に所定間隔で軸支されたものである。
【0028】
搬送ローラ26は、自由に回転する従動ローラ31と、駆動用モータを内蔵したモータ内蔵ローラ32とからなる。そして、コンベアユニット7内では、互いに隣接する搬送ローラ26同士が伝動ベルト29で巻回されている。即ち、モータ内蔵ローラ32の回転駆動力を、全ての従動ローラ31に伝動することができる。
なお、本実施形態では、1対のサイドフレーム25に5本の従動ローラ31と、1本のモータ内蔵ローラ32が軸支されており、搬送方向一方の外側から3つ目(搬送方向他方の外側から4つ目)にモータ内蔵ローラ32が配されている。
【0029】
支持部8は、コンベアユニット7を固定するものであり、さらに後述する移動手段5の走行体10が接続されると共にガイド部材6の可動部が固定されるものである。具体的には、支持部8は、ほぼ正方形の板部材であり、支持部8の上部にコンベアユニット7のサイドフレーム25の底部が、ボルト等の接続手段によって固定される。
【0030】
また、本実施形態では、支持部8の1対の辺部に、走行体10が接続される接続部33がそれぞれ2箇所ずつ設けられている。接続部33は、図4に示すように、支持部8と一体的に形成された接続本体部33aと、接続本体部33aと組み合わさって走行体10を挟み込む接続補助部33bとで構成されている。
接続補助部33bには、部材の厚み方向に貫通した係合孔40が設けられている。
接続本体部33aには、チェーンの隙間に挿通され、接続補助部33bの係合孔40に係合する係合突起41が設けられている。なお、係合突起41の突端部には、返しが形成されている。
【0031】
移動手段5は、図2、4に示すように、4条の長尺状の走行体10と、それぞれの走行体10が懸架される回転体11と、その回転体11が一体的に接合された6本の金属製のローラ13とで構成されている。
走行体10は、公知の長尺状のチェーンが採用されており、そのチェーンを環状に形成したものである。
本実施形態では、ローラ13として、3本の従動ローラ27と、駆動用モータ(駆動源)を内蔵した3本のモータ内蔵ローラ28が採用されている。
回転体11は、走行体10に回転を伝動する公知のスプロケットであり、ローラ13の長手方向両端部に2つずつ接合されている。即ち、同一のローラ13に一体的に接合された4つの回転体11は、同一の中心軸を有した回転体群を形成している。
本実施形態では、1条の走行体10に対して、4つの回転体11が噛み合って、走行体10をほぼ四角形の環状に形成している。そして、そのうちの2つの回転体11は、モータ内蔵ローラ28に接合されたものが採用されている。
【0032】
ガイド部材6は、公知の直動案内ガイドであり、図5、6に示すように、レール部15と、レール部15に沿って滑走する可動部16とで構成されている。
レール部15は、金属により構成されており、滑走部36と、その滑走部36の両端に設けられた固定部37とで構成されている。滑走部36は、断面形状が円形の長尺状の部分であり、固定部37は、ネジ等の接続手段を用いて骨格部2の上下に固定される部分である。
可動部16は、載置部3の支持部8に固定されるもので、滑走部36が挿通される貫通孔を有し、その貫通孔で滑走部36を保持して移動する部分である。
即ち、ガイド部材6は、骨格部2に固定されたレール部15に対して、可動部16が滑走部36に沿って相対的に移動する部材である。
【0033】
次に、本実施形態の昇降装置1における各部材間の組み合わせ構造について説明する。
本実施形態の昇降装置1は、図1に示すように、上部水平搬送ラインm、n及び下部水平搬送ラインs、tに対して、搬出入できるように配置されている。具体的には、昇降装置1における第1領域Aが、上部水平搬送ラインmと下部水平搬送ラインsの間に配され、第2領域Bが、上部水平搬送ラインnと下部水平搬送ラインtの間に配されている。即ち、上部水平搬送ラインm又は下部水平搬送ラインsから搬入された被搬送物は、第1領域Aに搬入され、上部水平搬送ラインn又は下部水平搬送ラインtから搬送された被搬送物は、第2領域Bに搬入される配置である。換言すれば、第1領域Aに搬入された被搬送物は、上部水平搬送ラインm又は下部水平搬送ラインsに搬出され、第2領域Bに搬入された被搬送物は、上部水平搬送ラインn又は下部水平搬送ラインtに搬出される配置である。
【0034】
昇降装置1における第1領域Aと第2領域Bは、図2に示すように、隣接した位置関係で、この隣接した2つの領域A、Bに跨るように移動手段5が設けられている。
第1領域Aについて説明すると、2本の中央柱部21bの間に2本のローラ13が軸支され、さらにその中央柱部21bの間に設けられたローラ13と平行且つ2本の頂点柱部21aの間に2本のローラ13が軸支されている。
【0035】
より詳細に説明すると、第1領域Aにおいては、各柱部21に配された2本のローラ13は、1つがモータ内蔵ローラ28であり柱部21の上側に配され、別の1つが従動ローラ27であり柱部21の下側に配されている。即ち、本実施形態では、第1領域Aにおいては、骨格部2の上側に配された2本のローラ13は、全てモーラ内蔵ローラ28であり、下側に配された2本のローラ13は、全て従動ローラ27である。
【0036】
第2領域Bについても、第1領域Aとほぼ同様である。即ち、第2領域Bでは、骨格部2の上側に配された2本のローラ13が、全てモータ内蔵ローラ28であり、下側に配された2本のローラ13は、全て従動ローラ27である。
なお、2本の中央柱部21bの間に配された2本のローラ13は、第1領域Aと第2領域Bで共有するローラである。そのため、第1領域Aと第2領域Bのローラ13の合計本数は6本で、その内訳は、骨格部2の下側に配された3本の従動ローラ27と、骨格部2の上側に配された3本のモータ内蔵ローラ28である。
【0037】
そして、各ローラ13に接合されたそれぞれの回転体11は、隣合ったローラ13のいずれかの回転体11とほぼ同一の平面上に存在する配置とされている。
ここで、理解を容易にするため、以下の説明においては、水平搬送ラインm、n、s、tが配された側を手前、対向する側を奥とし、ローラ13の長手方向奥側の端部側に位置する2つの回転体11のうち、ローラ13の端部に近い側を奥外回転体11a、その奥外回転体11aより手前側を奥内回転体11bとし、さらにローラ13の長手方向手前側の端部側に位置する2つの回転体11のうち、ローラ13の端部に近い側を前外回転体11c、その前外回転体11cより奥側を前内回転体11dとして説明する。
【0038】
即ち、第1領域Aの奥側では、4本のローラ13の奥外回転体11aはそれぞれほぼ同一の平面上に存在する配置であり、またその4本のローラ13の奥内回転体11bもそれぞれほぼ同一の平面(前記した奥外回転体11aの平面とは別の平面)上に存在する配置である。そして、第1領域Aの手前側では、4本のローラ13の前外回転体11cはそれぞれほぼ同一の平面上に存在する配置であり、またその4本のローラ13の前内回転体11dもそれぞれほぼ同一の平面(前記した前外回転体11cの平面とは別の平面)上に存在する配置である。
【0039】
また、第2領域Bについても、第1領域Aと同様である。即ち、奥側では、4本のローラ13の奥外回転体11aはそれぞれほぼ同一の平面上に存在する配置であり、またその4本のローラ13の奥内回転体11bもそれぞれほぼ同一の平面(前記した奥外回転体11aの平面とは別の平面)上に存在する配置である。そして、第2領域Bの手前側では、4本のローラ13の前外回転体11cはそれぞれほぼ同一の平面上に存在する配置であり、またその4本のローラ13の前内回転体11dもそれぞれほぼ同一の平面(前記した前外回転体11cの平面とは別の平面)上に存在する配置である。
また、前記したように、2本の中央柱部21bの間に配された2本のローラ13は、第1領域Aと第2領域Bで共有するローラであるため、全てのローラ13における奥外回転体11aと奥内回転体11bと前外回転体11cと前内回転体11dはそれぞれほぼ同一の平面上に存在する配置と言える。
【0040】
そして、各走行体10は、合計4つの回転体11と噛み合うように懸架されている。本実施形態では、各走行体10が懸架されるいずれかの回転体11が、中央柱部21bに軸支されたローラ13に設けられた回転体11とされている。
具体的には、第1領域A側では、4つの奥外回転体11a及び4つの前外回転体11cに走行体10aが1条ずつ懸架されており、第2領域B側では、4つの奥内回転体11b及び4つの前内回転体11dに走行体10bが1条ずつ懸架されている。即ち、第1領域A側の走行体10aと、第2領域B側の走行体10bは、互いに同一の平面に存在することはなく、中央柱部21bの位置で立体的に交差する関係である。換言すると、中央柱部21bに軸支されたローラ13は、第1領域A側の走行体10aと、第2領域B側の走行体10bが立体交差して形成された交差領域に存在し、そのローラ13の回転体11に各走行体10a、10bが懸架されている。
【0041】
また、各領域A、Bでは、ガイド部材6が、一定の間隔を空けて2箇所ずつ設けられている。ガイド部材6は、レール部15が柱部21と平行になるように、レール部15の固定部37を介して、骨格部2の上側外梁部23b及び底枠部22に固定されている。なお、本実施形態では、各領域A、Bにおける2箇所のレール部15は、図1に示す被搬送物の搬出入口と対向する側の上側外梁部23b及び底枠部22に固定されている。
【0042】
また、各領域A、Bにおける載置部3は、自身の領域を囲む走行体10と、隣接する領域の載置部3を囲む走行体10に接続されている。
即ち、第1領域Aにおける載置部3aは、図2に示すように、頂点柱部21a側が奥外回転部11a及び前外回転部11cに懸架された走行体10aに接続され、さらに中間柱部21b側が奥内回転部b及び前内回転部11dに懸架された走行体10bに接続されている。第2領域Bにおける載置部3bは、頂点柱部21a側が奥内回転部11b及び前内回転部11dに懸架された走行体10bに接続され、さらに中間柱部21b側が奥外回転部11a及び前外回転部11cに懸架された走行体10aに接続されている。換言すると、各領域A、Bにおける載置部3は、全てのローラ13が同一方向に回転する際に、それぞれ同一方向に移動する走行体10に接続されている。これにより、各載置部3は複数点支持されつつも、全てのローラ13が同一方向に回転すれば、第1領域Aの載置部3aと、第2領域Bの載置部3bは相互に近接・離反する方向に移動する。
【0043】
さらに、支持部8には、ガイド部材6の可動部16が固定されている。具体的には、可動部16は、固定部37を介して、支持部8の側部に固定されている。即ち、載置部3は、ガイド部材6のレール部15に沿って、安定したバランスで鉛直上下方向にのみ移動することができる。
また、本実施形態では、載置部3のコンベアユニット7の搬送方向が、走行体10が形成する平面を直交する方向に配置されている。
【0044】
次に、本実施形態の昇降装置1の動作について説明する。
本実施形態の昇降装置1は、異なる高さから2つの被搬送物を受け入れ、受け入れた2つの被搬送物の高さを反転させるように搬送する装置である。即ち、本実施形態の昇降装置1は、移動手段5により、2つの載置部3を相互に近接・離反させて、被搬送物を搬送する。
なお、以下の説明においては、第1領域Aの載置部3aの搬入待機位置を上部水平搬送ラインmと同じ高さとし、第2領域Bの載置部3bの搬入待機位置を下部水平搬送ラインtと同じ高さとする。
【0045】
第1領域A及び第2領域Bが、搬入待機位置であって、昇降装置1より搬送方向上流側で被搬送物が検知されれば、被搬送物を載置部3に受け入れる。具体的には、図7に示すように、昇降装置1の直前の図示しない在荷センサが、被搬送物を検知すれば、昇降装置1のコンベアユニット7のローラ26を駆動する。そして、昇降装置1における図示しない在荷センサによって、上部水平搬送ラインm及び下部水平搬送ラインtからの搬入が確認されると、コンベアユニット7のローラ26を停止して、各載置部3が昇降移動するように制御される。
【0046】
即ち、各載置部3で被搬送物の搬入が確認されると、被搬送物を昇降させるために、移動手段5の全てのモータ内蔵ローラ28が同一方向に回転するように駆動される。具体的には、図8に示すように、各モータ内蔵ローラ28は、搬入方向から見て時計周りに回転し、さらにこの動作に伴って、従動ローラ27も同じ方向に回転する。これにより、回転体11に懸架された走行体10が時計周り(図8)に移動するため、走行体10に接続された載置部3が移動する。
【0047】
ここで、各領域A、Bの載置部3a、3bは、自身を囲む走行体10と、隣接する領域の載置部3を囲む走行体10に接続されているため、各載置部3a、3bは複数点支持されつつも、連動して移動する。
【0048】
即ち、第1領域Aにおける載置部3aは、図9に示すように、下方に向かって移動し、第2領域Bにおける載置部3bは上方に向かって移動する。換言すると、隣接する載置部3同士は、相互に近接・離反する方向に移動し、そして、図9(c)に示すように、各載置部3a、3bの鉛直方向の位置が搬入待機位置からほぼ反転する位置に到達すると停止する。
そして、各載置部3a、3bが昇降動作を終えると、各載置部3a、3bのコンベアユニット7のローラ26を搬入時とは逆方向に駆動して、水平搬送ラインs、nに被搬送物を搬出する。
なお、このとき、各水平搬送ラインs、nにおけるローラも駆動される。
【0049】
以上のように、本実施形態では、各領域A、Bにおける載置部3a、3bが連動して昇降する機構を備えているため、いずれか一方の載置部3がカウンターバランスの役割として機能する。即ち、カウンターバランスの機能を担う部分が被搬送物を搬送することができるため、無駄がない。これにより、カウンターバランスを備えた昇降装置と同様、移動手段5に用いるローラ13におけるモータの駆動力を小さくできるため、製造コストを抑えることができる。
【0050】
また、本実施形態によれば、カウンターバランスを設ける場所を確保する必要がないため、水平搬送ラインの配置に自由度がある。即ち、例えば、図10に示すように、図1の水平搬送ラインm、n、s、tに加えて、ガイド部材6が配置された側に、別の水平搬送ラインf、g、q、rを接続することが可能である。また、被搬送物を直角に搬送できる公知の直角移載装置を載置部に採用すれば、さらに別の搬送ラインを接続することもできる。
【0051】
さらに、本実施形態の昇降装置1によれば、被搬送物が載置されなければ、必要以上の引っ張り力が走行体10に掛かることがないため、走行体10が加速度的に劣化する不具合がない。
【0052】
また、上記実施形態では、隣接した載置部3の双方に被搬送物を載置して昇降する動作を示したが、例えば、一方の載置部3に被搬送物を載せ、他方の載置部3には被搬送物を載せない状態で、昇降動作を実行しても構わない。
【0053】
上記実施形態では、同一の中心軸を有する複数の回転体11を1本のローラ13に一体的に接合する構成を示したが、本発明はこれに限定されるわけではなく、例えば、同一の中心軸を有する回転体11を複数のローラに分けて接合しても構わない。具体的には、上記実施形態に示したローラ13の長手方向中間部分がなく、長手方向端部側のみを残した構成である。ただし、この構成のローラは全ての箇所に使用すると、ローラの回転速度を一定に維持できない場合に、走行体10に不具合が発生し兼ねないので、例えば、従動側にのみ使用するなどの方法をとることで有効的なものとなる。即ち、上記実施形態よりも簡単に製造することができると共に、材料コストを抑えることができるため、製造コストを下げることができる。
【0054】
上記実施形態では、2つの載置部3を備え、各載置部3が昇降する領域が水平方向に直列的に隣接するような配置とした構成を示したが、本発明はこれに限定されるわけではなく、3つ以上の載置部3を備え、各載置部3が昇降する領域が水平方向に直列的に隣接させた構成であっても構わない。
【0055】
上記実施形態では、骨格部2の上部に位置するローラ13を全てモータ内蔵ローラ28とした構成を示したが、本発明はこれに限定されず、例えば、中央柱部21bに軸支されるローラのみをモータ内蔵ローラ28としても構わない。この構成によれば、上記実施形態より容量の大きいモータが内蔵されたローラを使用することが望ましい。
【0056】
上記実施形態では、骨格部2における剛性を確保するために、梁部23を最大限備えた構成を示したが、本発明はこれに限定されず、例えば、2本の中央柱部21bの間に設けた底部梁部23aや上側梁部23c等を設けない構成であっても構わない。
【符号の説明】
【0057】
1 昇降装置
3 載置部
5 移動手段
6 ガイド部材(案内手段)
10 走行体
11 回転体
13 ローラ
【特許請求の範囲】
【請求項1】
被搬送物を昇降手段によって昇降する昇降装置において、
昇降手段は、被搬送物を載置可能とした2以上の載置部と、前記2以上の載置部を連動して移動させる移動手段とを有し、各載置部が昇降する領域があり、前記領域は各載置部ごとに備えられると共に水平方向に直列的に隣接して配されるものであって、
載置部が昇降する際には、隣接する載置部同士が相互に鉛直成分を含む方向に近接・離反することを特徴とする昇降装置。
【請求項2】
前記移動手段は、搬送方向上部側と下部側にそれぞれ配された回転体と、環状に形成され上下に位置する回転体に懸架された走行体を有するものであって、
走行体は、1つの載置部を囲むように配され、且つ隣接する領域の載置部の別の走行体に立体的に交差する配置であり、
各載置部は、自身を囲む走行体と、隣接する領域の載置部を囲む別の走行体に接続されていることを特徴とする請求項1に記載の昇降装置。
【請求項3】
立体的に交差する走行体同士は、交差領域を形成するものであって、当該交差領域において同一の中心軸を有する複数の回転体が回転体群を形成していることを特徴とする請求項2に記載の昇降装置。
【請求項4】
前記交差領域に形成された回転体群は、搬送方向上部側と下部側に1組ずつ存在し、
少なくとも搬送方向上部側と下部側のいずれかの回転体群は、同一のローラに一体的に接合されており、当該ローラは駆動源を有することを特徴とする請求項3に記載の昇降装置。
【請求項5】
載置部の移動方向を規制する案内手段を有することを特徴とする請求項1乃至4のいずれかに記載の昇降装置。
【請求項1】
被搬送物を昇降手段によって昇降する昇降装置において、
昇降手段は、被搬送物を載置可能とした2以上の載置部と、前記2以上の載置部を連動して移動させる移動手段とを有し、各載置部が昇降する領域があり、前記領域は各載置部ごとに備えられると共に水平方向に直列的に隣接して配されるものであって、
載置部が昇降する際には、隣接する載置部同士が相互に鉛直成分を含む方向に近接・離反することを特徴とする昇降装置。
【請求項2】
前記移動手段は、搬送方向上部側と下部側にそれぞれ配された回転体と、環状に形成され上下に位置する回転体に懸架された走行体を有するものであって、
走行体は、1つの載置部を囲むように配され、且つ隣接する領域の載置部の別の走行体に立体的に交差する配置であり、
各載置部は、自身を囲む走行体と、隣接する領域の載置部を囲む別の走行体に接続されていることを特徴とする請求項1に記載の昇降装置。
【請求項3】
立体的に交差する走行体同士は、交差領域を形成するものであって、当該交差領域において同一の中心軸を有する複数の回転体が回転体群を形成していることを特徴とする請求項2に記載の昇降装置。
【請求項4】
前記交差領域に形成された回転体群は、搬送方向上部側と下部側に1組ずつ存在し、
少なくとも搬送方向上部側と下部側のいずれかの回転体群は、同一のローラに一体的に接合されており、当該ローラは駆動源を有することを特徴とする請求項3に記載の昇降装置。
【請求項5】
載置部の移動方向を規制する案内手段を有することを特徴とする請求項1乃至4のいずれかに記載の昇降装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−51674(P2012−51674A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−194763(P2010−194763)
【出願日】平成22年8月31日(2010.8.31)
【出願人】(592026819)伊東電機株式会社 (71)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年8月31日(2010.8.31)
【出願人】(592026819)伊東電機株式会社 (71)
【Fターム(参考)】
[ Back to top ]