
昇降装置

【課題】物品を上下方向に移動させる昇降装置に関するものであり、コンベアラインの中に配置されて上下のコンベアの間で物品を受け渡す用途の装置を改良し、全高の低い昇降装置を提供する。
【解決手段】一台の昇降テーブル6と、2基の門型フレーム7,8によって構成されている。昇降テーブル6にはテーブル側プーリー群20,21,22,23及び4個の直線ガイド25が設けられている。テーブル側プーリー群20,21,22,23には、上側列テーブル側プーリー27と、下側列テーブル側プーリー28がある。各柱部10,11,12,13には、内部に上部側プーリー列15と、下部側プーリー列16と、直線レール17が設けられている。各上部側プーリー列15に属するプーリー41等と、下部側プーリー列16に属するプーリー56等が定滑車として機能し、テーブル側プーリー列70a等が動滑車として機能して昇降テーブル6を昇降させる。
【解決手段】一台の昇降テーブル6と、2基の門型フレーム7,8によって構成されている。昇降テーブル6にはテーブル側プーリー群20,21,22,23及び4個の直線ガイド25が設けられている。テーブル側プーリー群20,21,22,23には、上側列テーブル側プーリー27と、下側列テーブル側プーリー28がある。各柱部10,11,12,13には、内部に上部側プーリー列15と、下部側プーリー列16と、直線レール17が設けられている。各上部側プーリー列15に属するプーリー41等と、下部側プーリー列16に属するプーリー56等が定滑車として機能し、テーブル側プーリー列70a等が動滑車として機能して昇降テーブル6を昇降させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品を上下方向に移動させる昇降装置に関するものである。本発明は、例えば立体的なコンベアラインの中に配置されて上下のコンベアの間で物品を受け渡す用途に使用されるものである。
【背景技術】
【0002】
郵便事業者や宅配便事業者は、集荷した小包や荷物等を行き先別に仕分ける作業を行う。例えば、集荷した荷物等は特定の仕分け場に集められ、そこで行き先別に仕分けられてトラック等に積み込まれる。
仕分け場では、コンベアラインが縦横に張りめぐらされ、集荷された荷物が行き先別に集められる。
ここで仕分け場におけるコンベアラインは、主搬送路から複数の副搬送路(子搬送路)が枝分かれし、さらに複数の副搬送路(孫搬送路)や曾孫搬送路が分岐している。
【0003】
搬送路の分岐は、例えば特許文献1に開示された様な分岐装置が使用されている。即ち搬送路の分岐点に特許文献1に開示された様な分岐装置が配され、特定の搬送物を副搬送路に移載する。
【0004】
また昨今は、仕分けがさらに細かくなり、コンベアラインを更に複雑化させざるを得ない状況にある。
そのためコンベアラインを立体的に組み立て、水平搬送路の上部または下部に別の水平搬送路を設け、荷物を上下の水平搬送路の間で受け渡す。
この様な用途に使用される昇降装置には、例えば昇降台をパンタ機構で昇降させるものがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3241487号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前記した昇降装置は、昇降台をパンタ機構で昇降させるものであるから、昇降台の下部にリンク機構が設けられる。前記した昇降装置は、昇降台の下部に大きな機構部があり、全高が高い。そのため水平搬送路を上下二段に組み立てる場合は問題無いものの、上中下3段やそれ以上の多段構造にレイアウトする場合には、使い勝手が悪い。
【0007】
そこで本発明は、従来技術の上記した問題点に注目し、全高の低い昇降装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記した課題を解決するための請求項1に記載の発明は、上下方向に自由度を持つ昇降テーブルと、昇降テーブルに回転自在に取り付けられた複数のテーブル側回転体と、昇降テーブルに対して上部側に離れた位置に昇降不能且つ回転自在に取り付けられた複数の上部側回転体と、昇降テーブルに対して下部側に離れた位置に昇降不能且つ回転自在に取り付けられた複数の下部側回転体と、線状動力伝動部材と、モータと、駆動用動力伝動部材を有し、
線状動力伝動部材が上部側回転体と一部のテーブル側回転体との間に懸架され、さらに同一又は他の線状動力伝動部材が下部側回転体と残るテーブル側回転体の一部又は全部との間に懸架され、かついずれかの線状動力伝動部材は上部側回転体と下部側回転体の双方に懸架されており、
少なくとも一つの上部側回転体又は一つの下部側回転体とモータの間に駆動用動力伝動部材が設けられていてモータの回転力が少なくとも一つの上部側回転体又は一つの下部側回転体に伝達され、線状動力伝動部材が走行して各回転体が回転し、
上部側回転体が回転してテーブル側回転体に対して線状動力伝動部材を繰り出す場合には下部側回転体は線状動力伝動部材をテーブル側回転体側から巻き取り、
上部側回転体が回転して線状動力伝動部材をテーブル側回転体側から巻き取る場合には下部側回転体はテーブル側回転体に対して線状動力伝動部材を繰り出して昇降テーブルを昇降させることを特徴とする昇降装置である。
【0009】
線状動力伝動部材とは例えばワイヤー、ロープ、チェーン、ベルト等であり、曲がり方向に自由度を持つ長尺状の部材である。
また回転体とは、プーリー、スプロケット、ローラ等であり、線状動力伝動部材を懸架し得る部材である。
本発明の昇降装置では、昇降テーブルに複数のテーブル側回転体が回転自在に取り付けられている。
またフレーム等に複数の上部側回転体と複数の下部側回転体が取り付けられている。ここで上部側回転体は、昇降テーブルに対して上部側に離れた位置にあり、回転可能であるが上下方向には移動しない。また下部側回転体は、昇降テーブルに対して下部側に離れた位置にあり、回転可能であるが上下方向には移動しない。
本発明の昇降装置では、ワイヤー等の線状動力伝動部材が各回転体に懸架されている。即ち複数の上部側回転体とテーブル側回転体、及び下部側回転体とテーブル側回転体に線状動力伝動部材が懸架されている。また上部側回転体と下部側回転体の間にも線状動力伝動部材が懸架されている。
そしてモータの回転力が少なくとも一つの上部側回転体又は一つの下部側回転体に伝達される。その結果、懸架された線状動力伝動部材が走行する。ここで、上下の位置に配置された上部側回転体及び下部側回転体は、前記した様に回転可能であるが昇降不能であって上下方向には自由度を持たない。これに対してテーブル側回転体は、昇降テーブルに取り付けられており、昇降テーブル自体が上下方向に自由度を持つ。
またいずれかの線状動力伝動部材は上部側回転体と下部側回転体の双方に懸架されているから上部側回転体と下部側回転体は連動し、例えば上部側回転体からテーブル側回転体に対して線状動力伝動部材を繰り出す状態の場合には、下部側回転体はテーブル側回転体側から線状動力伝動部材を巻き取り、テーブル側回転体が下方向に引っ張られて昇降テーブルが降下する。
逆に上部側回転体が回転して線状動力伝動部材がテーブル側回転体側から巻き取られる場合には下部側回転体はテーブル側回転体に対して線状動力伝動部材を繰り出す。その結果、テーブル側回転体が上方向に引っ張られて昇降テーブルが上昇する。
また本発明では、テーブル側回転体が動滑車として機能するので、昇降テーブルを昇降させる力が強い。
【0010】
請求項2に記載の発明は、複数のテーブル側回転体は、上下二列に並べて配置され、上側列に属するテーブル側回転体と上部側回転体との間に線状動力伝動部材が懸架され、下側列に属するテーブル側回転体と下部側回転体との間に線状動力伝動部材が懸架されていることを特徴とする請求項1に記載の昇降装置である。
【0011】
本発明の昇降装置では、テーブル側回転体が、上下二列に並べて配置されている。そして上側列に属するテーブル側回転体と上部側回転体との間に線状動力伝動部材が懸架され、下側列に属するテーブル側回転体と下部側回転体との間に線状動力伝動部材が懸架されている。そのため線状動力伝動部材の交差が少なく、線状動力伝動部材同士が擦れ合うことが防がれる。
【0012】
請求項3に記載の発明は、線状動力伝動部材はワイヤー又はロープであり、一本の線状動力伝動部材が上部側回転体と一部のテーブル側回転体との間に懸架され、さらに同一の線状動力伝動部材が上部側回転体と下部側回転体の間に懸架され、さらに同一の線状動力伝動部材が下部側回転体と残るテーブル側回転体の一部又は全部との間に懸架され、さらに同一の線状動力伝動部材が下部側回転体と上部側回転体の間に懸架されていることを特徴とする請求項1又は2に記載の昇降装置である。
【0013】
本実施形態の昇降装置では、一本の線状動力伝動部材が上下及び昇降テーブル側の回転体の巻回されている。また線状動力伝動部材はワイヤー又はロープであって滑りを許容する。そのため昇降テーブルに掛かる荷重(積載物による荷重)に偏りがあったり、線状動力伝動部材に弛みが生じて線状動力伝動部材の走行速度が部分的に相違する状態となっても、線状動力伝動部材が滑ることによって自動的に是正される。
【0014】
請求項4に記載の発明は、複数のテーブル側回転体と、複数の上部側回転体と、複数の下部側回転体から成る一組の昇降機構と、他の複数のテーブル側回転体と、他の複数の上部側回転体と、他の複数の下部側回転体から成る他の一組の昇降機構とを有し、
昇降テーブルは多角形であり、昇降テーブルの一辺に一組の昇降機構に属する複数のテーブル側回転体があり、昇降テーブルの対向する一辺に他の一組の昇降機構に属する複数のテーブル側回転体があり、各組の複数の上部側回転体と、複数の下部側回転体はそれぞれの組に属する複数のテーブル側回転体の上下の位置にあり、
線状動力伝動部材はワイヤー又はロープであり、一本の線状動力伝動部材が一組の昇降機構に属する複数の回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されていることを特徴とする請求項1乃至3のいずれかに記載の昇降装置である。
【0015】
本発明の昇降装置では、一本の線状動力伝動部材が、対向する昇降機構に跨がって懸架されている。そのためモータの個数を減ずることができる。また線状動力伝動部材はワイヤー又はロープであって滑りを許容する。そのため昇降テーブルに掛かる荷重(積載物による荷重)に偏りがあったり、線状動力伝動部材に弛みが生じて線状動力伝動部材の走行速度が部分的に相違する状態となっても、線状動力伝動部材が滑ることによって自動的に是正される。
【0016】
請求項5に記載の発明は、4組の昇降機構を有し、その内の2組の昇降機構は対向する位置にあって一本の線状動力伝動部材が一組の昇降機構に属する複数回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されており、
他の2組の昇降機構は対向する位置にあって一本の線状動力伝動部材が一組の昇降機構に属する複数回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されていることを特徴とする請求項4に記載の昇降装置である。
【0017】
本発明の昇降装置では、4組の昇降機構によって昇降テーブルが昇降されるから、昇降テーブルの姿勢が安定する。
【発明の効果】
【0018】
本発明の昇降装置では、高さ方向に関して昇降テーブルの上下の位置に必須の部材が少ない。即ち本発明の昇降装置では、昇降テーブルの上下の位置に必須の部材は、プーリー等の回転体だけである。そのため本発明の昇降装置は、昇降テーブルの昇降範囲の割に全高が低い。
【図面の簡単な説明】
【0019】
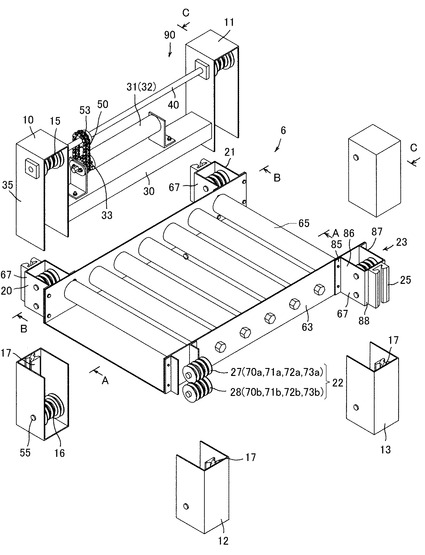
【図1】本発明の実施形態の昇降装置及びその周辺のコンベア装置を示す斜視図である。
【図2】図1の昇降装置の要部の斜視図である。
【図3】図1の昇降装置の昇降機構を説明する斜視図である。
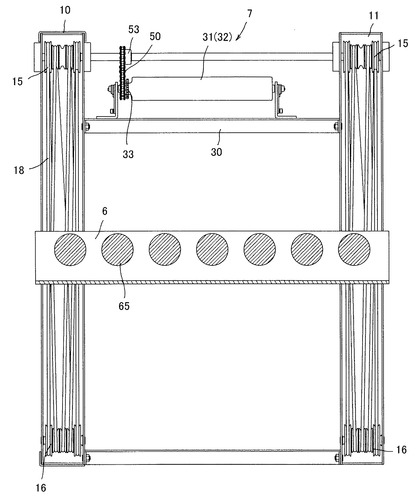
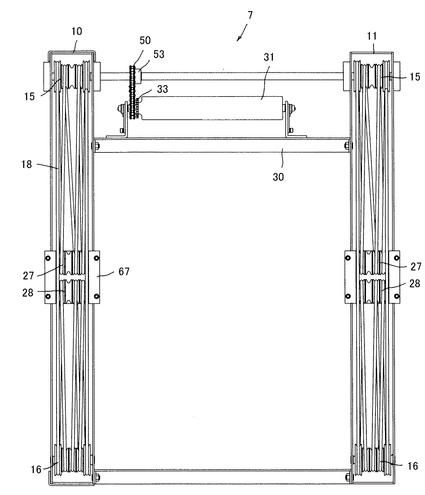
【図4】図2の昇降装置をA−A方向から見た矢視図である。
【図5】図2の昇降装置をB−B方向から見た矢視図である。
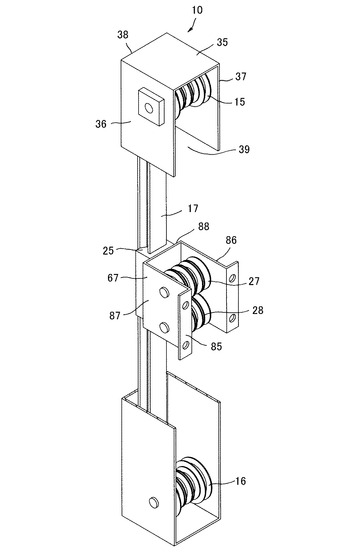
【図6】柱部の上端部及び下端部の正面断面図である。
【図7】柱部の上部の平面断面図である。
【図8】柱部及び昇降テーブルの一部の平面断面図である。
【図9】図2の昇降装置をC−C方向から見た矢視図である。
【図10】図1の昇降装置の柱部内における各プーリーのレイアウトとワイヤーの懸架経路を説明する斜視図である。
【図11】図1の昇降装置の柱部内における各プーリーのレイアウトとワイヤーの懸架経路を平面的に表示した説明図である。
【図12】ワイヤーの一部の走行を阻止した場合における昇降装置の動作を示す説明図であり、(a)は昇降テーブルが中間位置にある状態を示し、(b)は昇降テーブルが降下位置にある状態を示す。
【図13】ワイヤーの他の一部の走行を阻止した場合における昇降装置の動作を示す説明図であり、(a)は昇降テーブルが中間位置にある状態を示し、(b)は昇降テーブルが降下位置にある状態を示す。
【図14】本発明の実施形態の他の昇降装置及びその周辺のコンベア装置を示す斜視図である。
【図15】図14の昇降装置の柱部内における各プーリーのレイアウトとワイヤーの懸架経路を説明する斜視図である。
【図16】駆動プーリーに対するワイヤーの係合構造を説明する斜視図である。
【図17】ワイヤーの走行を阻止する位置を示す説明図である。
【図18】押圧プーリを使用して駆動プーリーに対するワイヤーの係合を強化する構造を説明する斜視図である。
【図19】押圧バンドを使用して駆動プーリーに対するワイヤーの係合を強化する構造を説明する斜視図である。
【発明を実施するための形態】
【0020】
以下さらに本発明の実施形態について説明する。
本実施形態の昇降装置1は、図1の様にコンベアライン2の一部に配置されるものである。コンベアライン2は、立体的にレイアウトされたものであり、下段コンベア3と、上段コンベア5を有し、両者の間に本実施形態の昇降装置1が設けられている。
昇降装置1は、一台の昇降テーブル6と、2基の門型フレーム7,8によって構成されている。昇降テーブル6には図2の様にテーブル側プーリー群20,21,22,23及び4個の直線ガイド25が設けられている。またテーブル側プーリー群20,21,22,23は、それぞれ上側列テーブル側プーリー27と、下側列テーブル側プーリー28に分かれれている。
門型フレーム7,8は、同一の構造であり、これを構成する各柱部10,11,12,13についても、略同一の構造であり、それぞれ内部に上部側プーリー列15と、下部側プーリー列16と、直線レール17が設けられている。そして各プーリー列にワイヤー(線状動力伝動部材)18が巻回されている。
【0021】
以下、順次説明する。
門型フレーム7は、図2,図4の様に柱部10,11を有し、両者の間がモータ台30で繋がれたものである。
モータ台30には、ギヤードモータ31が取り付けられている。なお本実施形態のギヤードモータ31は、モータ内蔵ローラを改造したものであり、ローラの内部にモータ(図示せず)と減速機(図示せず)が内蔵されたものである。そして内部のモータが回転することにより、外側のローラが回転する。
本実施形態で採用するギヤードモータ31は、ローラ32にスプロケット33を装着したものであり、内部のモータを駆動することによって外側のスプロケット33が回転する。
【0022】
柱部10,11の構造は、同一であるから、一個の柱部10について説明する。
柱部10は、図2、図3の様に断面形状が「コ」の字状の柱本体35を有している。即ち柱本体35は、左右の側壁36,37と裏板38を有しており、内部が空洞であって一面だけが開放されている。なお柱部10,11の柱本体35の開放面は、同一の方向に向いている。
そして柱本体35の凹部39内に、直線レール17と、上部側プーリー列15と、下部側プーリー列16が設けられている。
【0023】
直線レール17は、公知のガイドレールであり、柱本体35の裏板38の内面側の中心に取り付けられている。直線レール17は柱本体35の長手方向に沿って延びる。
【0024】
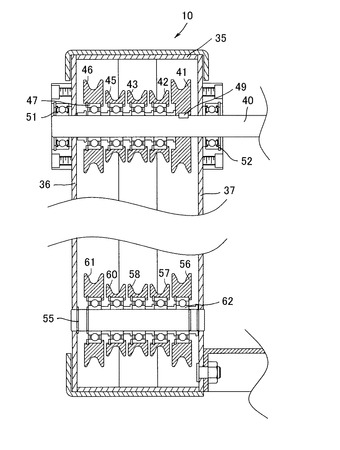
上部側プーリー列15は、柱本体35の上端近傍にあり、図6の様に共通の軸40に5個のプーリー(上部側回転体)41,42,43,45,46が設けられたものである。ここで、5個のプーリー(上部側回転体)41,42,43,45,46の内、両端に設けられたプーリー41,46は、他のプーリー42,43,45に比べて外径が大きい。
また5個のプーリー(上部側回転体)41,42,43,45,46の内、一端側のプーリー41は、キー49によって軸40に固定されており、軸40と一体的に回転する。他のプーリー42,43,45,46は、ベアリング47を介して軸40に取り付けられており、自由回転する。
軸40は、柱本体35の左右の側壁36,37に取り付けられた軸受け51,52に支持されていて柱本体35に対して回転可能である。
また軸40の一端は、柱部10から突出して他方の柱部11に至っている。軸40の柱部10から突出した部位には、スプロケット53が取り付けられている。そして軸40に装着されたスプロケット53と、前述したギヤードモータ31のスプロケット33との間にチェーン50が懸架されている。
【0025】
上部側プーリー列15を構成する各プーリー(上部側回転体)41,42,43,45,46は、自由に又は軸40と一体的に回転するが、軸40自体は回転方向以外の自由度を持たない。そのため上部側プーリー列15を構成する各プーリー(上部側回転体)41,42,43,45,46は回転可能であるが、昇降方向には自由度を持たず、昇降は不能である。
【0026】
下部側プーリー列16は、柱本体35の下端近傍にあり、共通の軸55に5個のプーリー(下部側回転体)56,57,58,60,61が設けられたものである。ここで、5個のプーリー(下部側回転体)56,57,58,60,61の内、両端に設けられたプーリー56,61は、他のプーリー57,58,60に比べて外径が大きい。
また5個のプーリー(下部側回転体)56,57,58,60,61は、いずれもベアリング62を介して軸55に取り付けられており、自由回転する。
下部側プーリー列16に属するプーリー(下部側回転体)56,57,58,60,61についても回転可能であるが、昇降方向には自由度を持たない。
【0027】
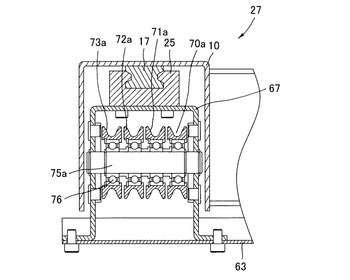
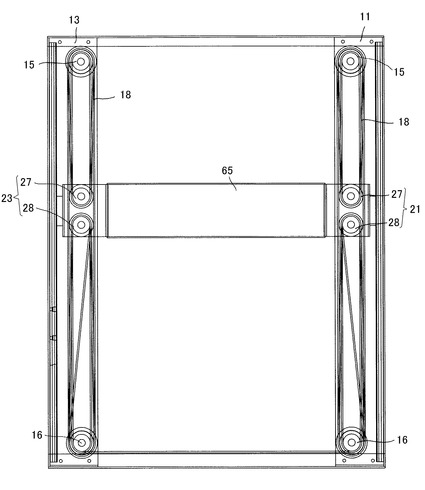
昇降テーブル6は、小型のローラコンベアであり、平面視が四角形(略正方形)のテーブルフレーム63を有し、当該テーブルフレーム63に複数のローラ65が取り付けられたものである。ローラ65のいずれかにはモータ(図示せず)が内蔵されており、モータの動力によって回転する。
【0028】
昇降テーブル6の対向する二側面には、前記したテーブル側プーリー群20,21,22,23及び4個の直線ガイド25が設けられている。テーブル側プーリー群20,21,22,23及び4個の直線ガイド25の構造は、いずれも同一の構造であり、ブラケット67によって昇降テーブル6のテーブルフレーム63に取り付けられている。
ブラケット67は、外観形状が「ひ」の字状であり、取付けフランジ部85と左右側壁部86,87と奥壁部88を有している。
そして奥壁部88の外周面側に直線ガイド25が取り付けられている。
【0029】
テーブル側プーリー群20,21,22,23は、いずれも上側列テーブル側プーリー27と、下側列テーブル側プーリー28が一組になって上下二段に配置されている。本実施係形態では、テーブル側プーリー群20,21,22,23は、4群あるから、上下二段のプーリーの列の組み合わせが4セット存在する。
【0030】
上側列テーブル側プーリー27と下側列テーブル側プーリー28の構成は同一である。例えば上側列テーブル側プーリー27であれば図8の様に4個のプーリー(テーブル側回転体)70a,71a,72a,73aが共通の軸75aに取り付けられたものである。各プーリー70a,71a,72a,73aは、いずれもベアリング76を介して軸75aに取り付けられており、自由回転が可能である。
【0031】
下側列テーブル側プーリー28は、前記した上側列テーブル側プーリー27と対になって組を構成するものであり、上側列テーブル側プーリー27の真下の位置に設けられている。下側列テーブル側プーリー28についても4個のプーリー(テーブル側回転体)70b,71b,72b,73bが共通の軸75bに取り付けられたものである。各プーリー70b,71b,72b,73bはいずれもベアリング76を介して軸75bに取り付けられており、自由回転が可能である。
【0032】
またもう一方の門型フレーム8は、前記した門型フレーム7と同一の形状、構造である。
【0033】
次に本実施形態の昇降装置1の各部材の係合関係について説明する。本実施形態の昇降装置1では、門型フレーム7,8で囲まれた空間に昇降テーブル6が配されている。そして昇降テーブル6に設けられたブラケット67は、いずれも柱部10,11,12,13の凹部40内に入り込み、ブラケット67の外周側に取り付けられた直線ガイド25が、柱部内の直線レール17と係合している。
そのため昇降テーブル6は、4本のガイドレール17に沿って直線移動し、平行姿勢を保持して上下動する。
【0034】
また各柱部10,11,12,13の上端近傍には上部側プーリー列15があり、下端近傍には下部側プーリー列16があるから、昇降テーブル6の上側列テーブル側プーリー27と下側列テーブル側プーリー28は、上部側プーリー列15と下部側プーリー列16の間にある。
即ち昇降テーブル6に対して上部側に離れた位置に上部側プーリー列15があり、下部側に離れた位置に下部側プーリー列16がある。
【0035】
そして各プーリー列15,16,27,28にワイヤー(線状動力伝動部材)18が巻回されている。
本実施形態では、柱部10,11,12,13ごとに一本のワイヤー18が使用されており、合計4本のワイヤーが巻回されている。本実施形態では、各ワイヤー18は、それぞれ環状に繋がっている。
【0036】
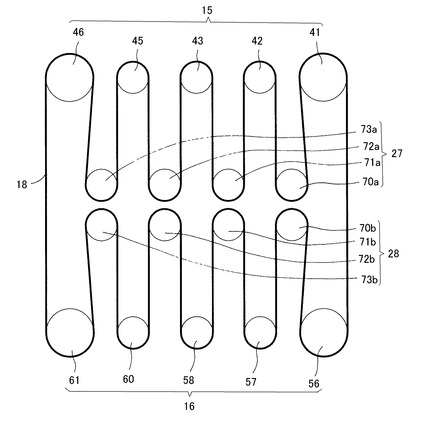
ワイヤーの巻回経路は、図10の通りであり、基本的に上部側プーリー列15と、上側列テーブル側プーリー27の間でワイヤー18が巻回され、さらに道中のいずれかで当該ワイヤー18が下側に回り込み、下部側プーリー列16と、下側列テーブル側プーリー28との間で同一のワイヤー18が巻回されて、再度上部側プーリー列15に戻る。
【0037】
巻回経路を図10、図11を参照してより詳細に説明する。例えば、上部側プーリー列15の中の端部に配されたプーリー41を基端として説明すると、上部側プーリー列15のプーリーから昇降テーブル6の上段側にある上側列テーブル側プーリー27のプーリー70aに昇降テーブル6側(以下、内側)からワイヤー18が懸架され、ワイヤー18は、プーリー70aの柱側(以下、外側)に回り込んで上部側プーリー列15の二番目のプーリー42に内側から係合する。この柱部10,11,12,13の上段側ではこの巻回を繰り返す。即ち、プーリー42、プーリー71a、プーリー43、プーリー72a、プーリー45、プーリー73a、プーリー46の順にワイヤー18が巻回されて行く。
【0038】
そして上部側プーリー列15の末端のプーリー46から下部側プーリー列16にワイヤー18が渡り、下部側プーリー列16の末端のプーリー61に懸架される。ここで上部側プーリー列15の末端のプーリー46及び下部側プーリー列16の末端のプーリー61は、共に他のプーリーに比べて直径が大きいので、ワイヤー18の渡り部分83は、他の部位に比べて立体的に離れる。そのためワイヤー18が交錯しない。
【0039】
そして下部側プーリー列16と下側列テーブル側プーリー28の間に順次ワイヤー18が懸架される。
下部側におけるワイヤー18の懸架経路は、前記した上部側と対称的である。
即ちワイヤー18は、上部側プーリー列15の末端のプーリー46から下部側プーリー列16の末端のプーリー61に内側から懸架される。
そして下部側プーリー列16のプーリー61の外側からワイヤー18が引き出され、下側列テーブル側プーリー28のプーリー73bの外側からワイヤー18が懸架される。さらにワイヤー18は、下側列テーブル側プーリー28のプーリー73bの内側から引き出され、下部側プーリー列16のプーリー60の内側から巻回される。
下段側ではこの巻回を繰り返す。即ち、プーリー61、プーリー73b、プーリー60、プーリー72b、プーリー58、プーリー71b、プーリー57,プーリー70b、プーリー56の順にワイヤー18が巻回されて行く。
そしてワイヤー18は、基端たる上部側プーリー列15の中の端部に配されたプーリー41に戻る。
このワイヤー18の渡り部分83についても、他の部位に比べて立体的に離れる。
【0040】
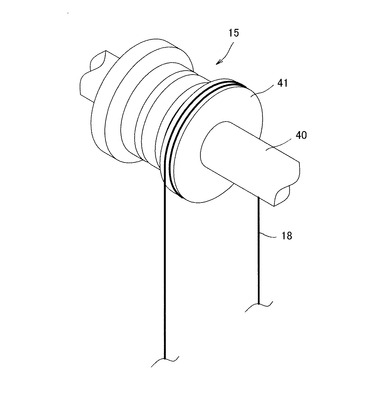
なお、基端として説明したプーリー41は、唯一の駆動プーリーとして機能するものであるから、図16の様に、360度以上に渡ってワイヤー18を係合させることが望ましい。即ちプーリー41には、ワイヤー18を二重巻きにすることが望ましい。
【0041】
次に本実施形態の昇降装置1の作用について説明する。
本実施形態の昇降装置1を使用する場合には、いずれかの位置でワイヤー18の走行を停止するか、ワイヤー18の走行に抵抗を設けた状態で、ギヤードモータ31を回転する。
その結果、ギヤードモータ31の回転力がチェーン50を経て軸40に伝動され、軸40が回転する。ここで軸40に装着されたプーリー41,42,43,45,46の内、端部のプーリー41は、キー49を介して軸40に取り付けられているので、軸40の回転と共にプーリー41が回転する。即ちプーリー41は、駆動プーリーとして機能する。本実施形態では、プーリー41が唯一の駆動プーリーであり、他のプーリーは、すべて従動プーリーである。
即ち軸40に装着された他のプーリー42,43,45,46は、いずれもベアリング47を介して軸40に取り付けられているので、空転する。
また上側列テーブル側プーリー27に属するプーリー70a,71a,72a,73a、下側列テーブル側プーリー28に属するプーリー70b,71b,72b,73b、下部側プーリー列16に属するプーリー56,57,58,60,61についても空転する。
【0042】
そして上部側プーリー列15に属するプーリー41,42,43,45,46と、下部側プーリー列16に属するプーリー56,57,58,60,61は、上下方向に固定されており、上側列テーブル側プーリー27に属するプーリー70a,71a,72a,73aと下側列テーブル側プーリー28に属するプーリー70b,71b,72b,73bは昇降可能である。
そのため本実施形態では、上部側プーリー列15に属するプーリー41,42,43,45,46と、下部側プーリー列16に属するプーリー56,57,58,60,61が定滑車として機能し、テーブル側プーリー列に属するプーリー70a,71a,72a,73a,70b,71b,72b,73bが動滑車として機能して昇降テーブル6を昇降させる。
【0043】
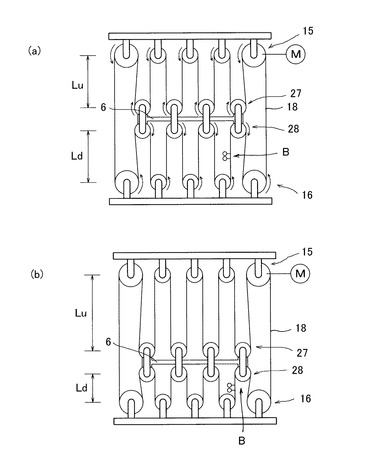
この原理について図12を参照しつつ説明する。
図12は、昇降装置1における各プーリー列15,16,27,28とワイヤー18の関係を模式的に説明するものである。
本実施形態では、基本的に上部側プーリー列15と、上側列テーブル側プーリー27の間でワイヤー18が巻回され、さらに道中のいずれかで当該ワイヤーが下側に回り込み、下部側プーリー列16と下側列テーブル側プーリー28との間で同一のワイヤー18が巻回されている。
【0044】
この状態で、例えばモータMで回動されるプーリー41から最も遠く、且つ上部側プーリー列15と、下部側プーリー列16を繋ぐ渡り部分Aでワイヤーの走行を強制的に停止し、この状態でギヤードモータ31を回動させる場合を考える。例えばプーリー41を図の様に反時計回りに回転させると、上部側プーリー列15と上側列テーブル側プーリー27との間では、ワイヤー18を繰り出すこととなる。そのため上部側プーリー列15と上側列テーブル側プーリー27との間の距離Luが広がる。
【0045】
逆に下部側プーリー列16と、下側列テーブル側プーリー28との関係では、ワイヤー18を巻き取る方向となるため、両者の間の距離Ldが縮まる。
そのため中間の昇降テーブル6は降下する。
同様の原理から、プーリー41を逆転すれば、上部側プーリー列15と上側列テーブル側プーリー27との間では、ワイヤー18が巻き取られ、下部側プーリー列16と、下側列テーブル側プーリー28との関係では、ワイヤー18が繰り出されることとなり、昇降テーブル6が上昇する。
【0046】
先の説明では、ワイヤー18を上部側プーリー列15と、下部側プーリー列16の渡り部分で停止させたが、他の部位で停止させても同様の機能を発揮する。
例えば図13の様に、下部側プーリー列16と、下側列テーブル側プーリー28の中途の位置Bでワイヤー18を停止させても、昇降テーブル6は昇降する。ただし、上部側の繰り出し量又は巻き取り量と、下部側の繰り出し量又は巻き取り量が不均一となり、昇降テーブル6は、両者のバランスによって昇降することとなり、昇降速度は早くなる。
【0047】
昇降テーブル6の昇降速度は、ワイヤー18を停止させる位置が、駆動プーリーたるプーリー41から遠くなる程、遅くなる。
図17の様に、駆動プーリーたるプーリー41に隣接したa位置でワイヤー18を停止させた場合の昇降テーブル6の昇降速度を基準速度Vとしたとき、b位置またはb’位置でワイヤー18を停止させた場合の昇降速度を基準速度は、V/2となる。
同様に、c位置またはc’位置でワイヤー18を停止させた場合の昇降速度を基準速度は、V/4となり、d位置またはd’位置でワイヤー18を停止させた場合の昇降速度を基準速度は、V/6となる。またe位置(図12ではA位置)でワイヤー18を停止させた場合の昇降速度を基準速度は、V/8となる。
昇降力は、速度に反比例する。
【0048】
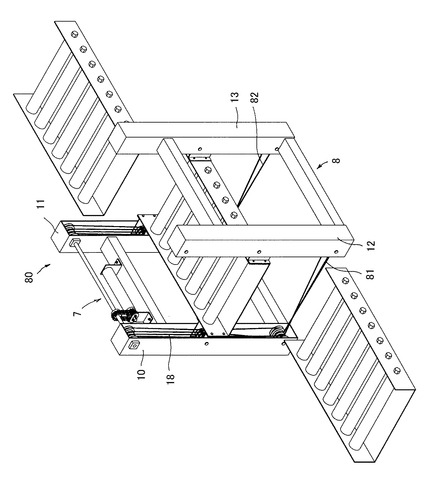
本実施形態では、ギヤードモータ31を門型フレーム7,8に一台づつ設置したが、図14に示す昇降装置80の様に、一方の門型フレーム7にだけギヤードモータ31を設置し、対向する門型フレーム7と、門型フレーム8に一本のワイヤーを巻回してもよい。即ち柱部10と柱部12との間に渡りワイヤ−81を渡して、門型フレーム7側から、動力を門型フレーム8側に伝える。
同様に、柱部11と柱部13との間に渡りワイヤ−82を渡して、門型フレーム7側から動力を門型フレーム8側に伝える。
即ち本実施形態の昇降装置80では、門型フレーム7の柱部10内に内蔵された昇降機構のプーリーと、対向する位置にある柱部12内に内蔵された昇降機構のプーリーに同一のワイヤー18(渡りワイヤ−81)が巻回されている。
この様に、本実施形態の昇降装置80では、一本のワイヤー(線状動力伝動部材)18が一組の昇降機構に属する複数のプーリーと他の一組の昇降機構に属する複数のプーリーの双方に懸架されている。
【0049】
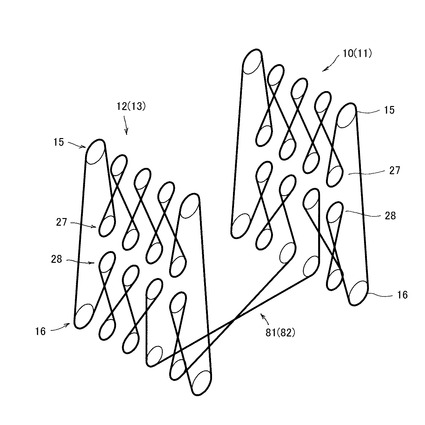
ワイヤー18の懸架経路は、図15の通りであり、基本的に上部側プーリー列15と、上側列テーブル側プーリー27の間でワイヤー18が巻回され、さらに道中のいずれかで当該ワイヤー18が下側に回り込み、下部側プーリー列16と、下側列テーブル側プーリー28との間で同一のワイヤー18が巻回される。
そして下部側プーリー列16と、下側列テーブル側プーリー28との間で同一のワイヤー18が巻回されている部位の中途で、ワイヤー18は他方の対向する位置の柱部12に渡り、同様に上部側プーリー列15と、上側列テーブル側プーリー27の間でワイヤー18が巻回され、下部側プーリー列16と、下側列テーブル側プーリー28との間で同一のワイヤー18が巻回される。
【0050】
上記した実施形態では、二つの柱部に対して一本のワイヤーを巻回したが、3以上の柱部にワイヤーを巻回してもよい。逆に、一つの柱部内のプーリーに複数のワイヤーを巻回してもよい。例えば、ワイヤー18の走行を阻止する部位(図12のA部)でワイヤー18を分断して2本のワイヤーとしてもよい。
【0051】
本実施形態では、ギヤードモータ31と、スプロケット33と、チェーン50と、スプロケット53及び軸40によって一連の駆動用動力伝動部材90が構成されているが、例えば、ギヤードモータ31によって軸40を直接回転するといったより簡単な駆動用動力伝動部材を使用してもよい。
【0052】
以上説明した実施形態では、線状動力伝動部材としてワイヤーを採用し、回転体としてプーリーを使用した。これらに代わって、ロープ又はベルトとプーリーとの組み合わせや、チェーンとスプロケットとの組み合わせを採用することもできる。しかしながら本発明においては、線状動力伝動部材と回転体との間に滑りを許すことが望ましいので、ワイヤー又はロープと、プーリーとの組み合わせを採用することが推奨される。
【0053】
以上説明した昇降装置1,80は、いずれもモータを動力として昇降テーブル6を昇降させるものであるから、油圧シリンダーを使用する装置の様に油が漏れたり、空圧シリンダーを使用する装置の様に排気による埃が出ない。そのため本実施形態の昇降装置1,80は、例えばクリーンルームの様な汚れを避けるべき場所で使用することもできる。
【0054】
また本実施形態の昇降装置1,80は、昇降させる物品の大きさや重さ、衝撃に対する強度に応じて、ユーザがワイヤー18を停止させる位置を変更し、昇降速度や昇降力を変更することもできる。
【0055】
先に、駆動プーリたるプーリー41に、ワイヤー18を二重巻きする構成を説明したが、他の方策として、図18の様にプーリー41に押圧プーリ91や押圧ドラム(図示せず)を押し当て、ワイヤー18とプーリー41との接触力を強める方策も可能である。またプーリー41に図19の様な押圧バンド92や押圧ベルトを押し当てて、ワイヤー18とプーリー41との接触力を強める方策も可能である。
【符号の説明】
【0056】
1 昇降装置
2 コンベアライン
3 下段コンベア
5 上段コンベア
6 昇降テーブル
7,8 門型フレーム
10,11,12,13 柱部
15 上部側プーリー列
16 下部側プーリー列
17 直線レール
18 ワイヤー(線状動力伝動部材)
20,21,22,23 テーブル側プーリー群
25 直線ガイド
27 上側列テーブル側プーリー
28 下側列テーブル側プーリー
31 ギヤードモータ
41,42,43,45,46 プーリー(上部側回転体)
56,57,58,60,61 プーリー(下部側回転体)
63 テーブルフレーム
70a,71a,72a,73a プーリー(テーブル側回転体)
70b,71b,72b,73b プーリー(テーブル側回転体)
80 昇降装置
【技術分野】
【0001】
本発明は、物品を上下方向に移動させる昇降装置に関するものである。本発明は、例えば立体的なコンベアラインの中に配置されて上下のコンベアの間で物品を受け渡す用途に使用されるものである。
【背景技術】
【0002】
郵便事業者や宅配便事業者は、集荷した小包や荷物等を行き先別に仕分ける作業を行う。例えば、集荷した荷物等は特定の仕分け場に集められ、そこで行き先別に仕分けられてトラック等に積み込まれる。
仕分け場では、コンベアラインが縦横に張りめぐらされ、集荷された荷物が行き先別に集められる。
ここで仕分け場におけるコンベアラインは、主搬送路から複数の副搬送路(子搬送路)が枝分かれし、さらに複数の副搬送路(孫搬送路)や曾孫搬送路が分岐している。
【0003】
搬送路の分岐は、例えば特許文献1に開示された様な分岐装置が使用されている。即ち搬送路の分岐点に特許文献1に開示された様な分岐装置が配され、特定の搬送物を副搬送路に移載する。
【0004】
また昨今は、仕分けがさらに細かくなり、コンベアラインを更に複雑化させざるを得ない状況にある。
そのためコンベアラインを立体的に組み立て、水平搬送路の上部または下部に別の水平搬送路を設け、荷物を上下の水平搬送路の間で受け渡す。
この様な用途に使用される昇降装置には、例えば昇降台をパンタ機構で昇降させるものがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3241487号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前記した昇降装置は、昇降台をパンタ機構で昇降させるものであるから、昇降台の下部にリンク機構が設けられる。前記した昇降装置は、昇降台の下部に大きな機構部があり、全高が高い。そのため水平搬送路を上下二段に組み立てる場合は問題無いものの、上中下3段やそれ以上の多段構造にレイアウトする場合には、使い勝手が悪い。
【0007】
そこで本発明は、従来技術の上記した問題点に注目し、全高の低い昇降装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記した課題を解決するための請求項1に記載の発明は、上下方向に自由度を持つ昇降テーブルと、昇降テーブルに回転自在に取り付けられた複数のテーブル側回転体と、昇降テーブルに対して上部側に離れた位置に昇降不能且つ回転自在に取り付けられた複数の上部側回転体と、昇降テーブルに対して下部側に離れた位置に昇降不能且つ回転自在に取り付けられた複数の下部側回転体と、線状動力伝動部材と、モータと、駆動用動力伝動部材を有し、
線状動力伝動部材が上部側回転体と一部のテーブル側回転体との間に懸架され、さらに同一又は他の線状動力伝動部材が下部側回転体と残るテーブル側回転体の一部又は全部との間に懸架され、かついずれかの線状動力伝動部材は上部側回転体と下部側回転体の双方に懸架されており、
少なくとも一つの上部側回転体又は一つの下部側回転体とモータの間に駆動用動力伝動部材が設けられていてモータの回転力が少なくとも一つの上部側回転体又は一つの下部側回転体に伝達され、線状動力伝動部材が走行して各回転体が回転し、
上部側回転体が回転してテーブル側回転体に対して線状動力伝動部材を繰り出す場合には下部側回転体は線状動力伝動部材をテーブル側回転体側から巻き取り、
上部側回転体が回転して線状動力伝動部材をテーブル側回転体側から巻き取る場合には下部側回転体はテーブル側回転体に対して線状動力伝動部材を繰り出して昇降テーブルを昇降させることを特徴とする昇降装置である。
【0009】
線状動力伝動部材とは例えばワイヤー、ロープ、チェーン、ベルト等であり、曲がり方向に自由度を持つ長尺状の部材である。
また回転体とは、プーリー、スプロケット、ローラ等であり、線状動力伝動部材を懸架し得る部材である。
本発明の昇降装置では、昇降テーブルに複数のテーブル側回転体が回転自在に取り付けられている。
またフレーム等に複数の上部側回転体と複数の下部側回転体が取り付けられている。ここで上部側回転体は、昇降テーブルに対して上部側に離れた位置にあり、回転可能であるが上下方向には移動しない。また下部側回転体は、昇降テーブルに対して下部側に離れた位置にあり、回転可能であるが上下方向には移動しない。
本発明の昇降装置では、ワイヤー等の線状動力伝動部材が各回転体に懸架されている。即ち複数の上部側回転体とテーブル側回転体、及び下部側回転体とテーブル側回転体に線状動力伝動部材が懸架されている。また上部側回転体と下部側回転体の間にも線状動力伝動部材が懸架されている。
そしてモータの回転力が少なくとも一つの上部側回転体又は一つの下部側回転体に伝達される。その結果、懸架された線状動力伝動部材が走行する。ここで、上下の位置に配置された上部側回転体及び下部側回転体は、前記した様に回転可能であるが昇降不能であって上下方向には自由度を持たない。これに対してテーブル側回転体は、昇降テーブルに取り付けられており、昇降テーブル自体が上下方向に自由度を持つ。
またいずれかの線状動力伝動部材は上部側回転体と下部側回転体の双方に懸架されているから上部側回転体と下部側回転体は連動し、例えば上部側回転体からテーブル側回転体に対して線状動力伝動部材を繰り出す状態の場合には、下部側回転体はテーブル側回転体側から線状動力伝動部材を巻き取り、テーブル側回転体が下方向に引っ張られて昇降テーブルが降下する。
逆に上部側回転体が回転して線状動力伝動部材がテーブル側回転体側から巻き取られる場合には下部側回転体はテーブル側回転体に対して線状動力伝動部材を繰り出す。その結果、テーブル側回転体が上方向に引っ張られて昇降テーブルが上昇する。
また本発明では、テーブル側回転体が動滑車として機能するので、昇降テーブルを昇降させる力が強い。
【0010】
請求項2に記載の発明は、複数のテーブル側回転体は、上下二列に並べて配置され、上側列に属するテーブル側回転体と上部側回転体との間に線状動力伝動部材が懸架され、下側列に属するテーブル側回転体と下部側回転体との間に線状動力伝動部材が懸架されていることを特徴とする請求項1に記載の昇降装置である。
【0011】
本発明の昇降装置では、テーブル側回転体が、上下二列に並べて配置されている。そして上側列に属するテーブル側回転体と上部側回転体との間に線状動力伝動部材が懸架され、下側列に属するテーブル側回転体と下部側回転体との間に線状動力伝動部材が懸架されている。そのため線状動力伝動部材の交差が少なく、線状動力伝動部材同士が擦れ合うことが防がれる。
【0012】
請求項3に記載の発明は、線状動力伝動部材はワイヤー又はロープであり、一本の線状動力伝動部材が上部側回転体と一部のテーブル側回転体との間に懸架され、さらに同一の線状動力伝動部材が上部側回転体と下部側回転体の間に懸架され、さらに同一の線状動力伝動部材が下部側回転体と残るテーブル側回転体の一部又は全部との間に懸架され、さらに同一の線状動力伝動部材が下部側回転体と上部側回転体の間に懸架されていることを特徴とする請求項1又は2に記載の昇降装置である。
【0013】
本実施形態の昇降装置では、一本の線状動力伝動部材が上下及び昇降テーブル側の回転体の巻回されている。また線状動力伝動部材はワイヤー又はロープであって滑りを許容する。そのため昇降テーブルに掛かる荷重(積載物による荷重)に偏りがあったり、線状動力伝動部材に弛みが生じて線状動力伝動部材の走行速度が部分的に相違する状態となっても、線状動力伝動部材が滑ることによって自動的に是正される。
【0014】
請求項4に記載の発明は、複数のテーブル側回転体と、複数の上部側回転体と、複数の下部側回転体から成る一組の昇降機構と、他の複数のテーブル側回転体と、他の複数の上部側回転体と、他の複数の下部側回転体から成る他の一組の昇降機構とを有し、
昇降テーブルは多角形であり、昇降テーブルの一辺に一組の昇降機構に属する複数のテーブル側回転体があり、昇降テーブルの対向する一辺に他の一組の昇降機構に属する複数のテーブル側回転体があり、各組の複数の上部側回転体と、複数の下部側回転体はそれぞれの組に属する複数のテーブル側回転体の上下の位置にあり、
線状動力伝動部材はワイヤー又はロープであり、一本の線状動力伝動部材が一組の昇降機構に属する複数の回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されていることを特徴とする請求項1乃至3のいずれかに記載の昇降装置である。
【0015】
本発明の昇降装置では、一本の線状動力伝動部材が、対向する昇降機構に跨がって懸架されている。そのためモータの個数を減ずることができる。また線状動力伝動部材はワイヤー又はロープであって滑りを許容する。そのため昇降テーブルに掛かる荷重(積載物による荷重)に偏りがあったり、線状動力伝動部材に弛みが生じて線状動力伝動部材の走行速度が部分的に相違する状態となっても、線状動力伝動部材が滑ることによって自動的に是正される。
【0016】
請求項5に記載の発明は、4組の昇降機構を有し、その内の2組の昇降機構は対向する位置にあって一本の線状動力伝動部材が一組の昇降機構に属する複数回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されており、
他の2組の昇降機構は対向する位置にあって一本の線状動力伝動部材が一組の昇降機構に属する複数回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されていることを特徴とする請求項4に記載の昇降装置である。
【0017】
本発明の昇降装置では、4組の昇降機構によって昇降テーブルが昇降されるから、昇降テーブルの姿勢が安定する。
【発明の効果】
【0018】
本発明の昇降装置では、高さ方向に関して昇降テーブルの上下の位置に必須の部材が少ない。即ち本発明の昇降装置では、昇降テーブルの上下の位置に必須の部材は、プーリー等の回転体だけである。そのため本発明の昇降装置は、昇降テーブルの昇降範囲の割に全高が低い。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態の昇降装置及びその周辺のコンベア装置を示す斜視図である。
【図2】図1の昇降装置の要部の斜視図である。
【図3】図1の昇降装置の昇降機構を説明する斜視図である。
【図4】図2の昇降装置をA−A方向から見た矢視図である。
【図5】図2の昇降装置をB−B方向から見た矢視図である。
【図6】柱部の上端部及び下端部の正面断面図である。
【図7】柱部の上部の平面断面図である。
【図8】柱部及び昇降テーブルの一部の平面断面図である。
【図9】図2の昇降装置をC−C方向から見た矢視図である。
【図10】図1の昇降装置の柱部内における各プーリーのレイアウトとワイヤーの懸架経路を説明する斜視図である。
【図11】図1の昇降装置の柱部内における各プーリーのレイアウトとワイヤーの懸架経路を平面的に表示した説明図である。
【図12】ワイヤーの一部の走行を阻止した場合における昇降装置の動作を示す説明図であり、(a)は昇降テーブルが中間位置にある状態を示し、(b)は昇降テーブルが降下位置にある状態を示す。
【図13】ワイヤーの他の一部の走行を阻止した場合における昇降装置の動作を示す説明図であり、(a)は昇降テーブルが中間位置にある状態を示し、(b)は昇降テーブルが降下位置にある状態を示す。
【図14】本発明の実施形態の他の昇降装置及びその周辺のコンベア装置を示す斜視図である。
【図15】図14の昇降装置の柱部内における各プーリーのレイアウトとワイヤーの懸架経路を説明する斜視図である。
【図16】駆動プーリーに対するワイヤーの係合構造を説明する斜視図である。
【図17】ワイヤーの走行を阻止する位置を示す説明図である。
【図18】押圧プーリを使用して駆動プーリーに対するワイヤーの係合を強化する構造を説明する斜視図である。
【図19】押圧バンドを使用して駆動プーリーに対するワイヤーの係合を強化する構造を説明する斜視図である。
【発明を実施するための形態】
【0020】
以下さらに本発明の実施形態について説明する。
本実施形態の昇降装置1は、図1の様にコンベアライン2の一部に配置されるものである。コンベアライン2は、立体的にレイアウトされたものであり、下段コンベア3と、上段コンベア5を有し、両者の間に本実施形態の昇降装置1が設けられている。
昇降装置1は、一台の昇降テーブル6と、2基の門型フレーム7,8によって構成されている。昇降テーブル6には図2の様にテーブル側プーリー群20,21,22,23及び4個の直線ガイド25が設けられている。またテーブル側プーリー群20,21,22,23は、それぞれ上側列テーブル側プーリー27と、下側列テーブル側プーリー28に分かれれている。
門型フレーム7,8は、同一の構造であり、これを構成する各柱部10,11,12,13についても、略同一の構造であり、それぞれ内部に上部側プーリー列15と、下部側プーリー列16と、直線レール17が設けられている。そして各プーリー列にワイヤー(線状動力伝動部材)18が巻回されている。
【0021】
以下、順次説明する。
門型フレーム7は、図2,図4の様に柱部10,11を有し、両者の間がモータ台30で繋がれたものである。
モータ台30には、ギヤードモータ31が取り付けられている。なお本実施形態のギヤードモータ31は、モータ内蔵ローラを改造したものであり、ローラの内部にモータ(図示せず)と減速機(図示せず)が内蔵されたものである。そして内部のモータが回転することにより、外側のローラが回転する。
本実施形態で採用するギヤードモータ31は、ローラ32にスプロケット33を装着したものであり、内部のモータを駆動することによって外側のスプロケット33が回転する。
【0022】
柱部10,11の構造は、同一であるから、一個の柱部10について説明する。
柱部10は、図2、図3の様に断面形状が「コ」の字状の柱本体35を有している。即ち柱本体35は、左右の側壁36,37と裏板38を有しており、内部が空洞であって一面だけが開放されている。なお柱部10,11の柱本体35の開放面は、同一の方向に向いている。
そして柱本体35の凹部39内に、直線レール17と、上部側プーリー列15と、下部側プーリー列16が設けられている。
【0023】
直線レール17は、公知のガイドレールであり、柱本体35の裏板38の内面側の中心に取り付けられている。直線レール17は柱本体35の長手方向に沿って延びる。
【0024】
上部側プーリー列15は、柱本体35の上端近傍にあり、図6の様に共通の軸40に5個のプーリー(上部側回転体)41,42,43,45,46が設けられたものである。ここで、5個のプーリー(上部側回転体)41,42,43,45,46の内、両端に設けられたプーリー41,46は、他のプーリー42,43,45に比べて外径が大きい。
また5個のプーリー(上部側回転体)41,42,43,45,46の内、一端側のプーリー41は、キー49によって軸40に固定されており、軸40と一体的に回転する。他のプーリー42,43,45,46は、ベアリング47を介して軸40に取り付けられており、自由回転する。
軸40は、柱本体35の左右の側壁36,37に取り付けられた軸受け51,52に支持されていて柱本体35に対して回転可能である。
また軸40の一端は、柱部10から突出して他方の柱部11に至っている。軸40の柱部10から突出した部位には、スプロケット53が取り付けられている。そして軸40に装着されたスプロケット53と、前述したギヤードモータ31のスプロケット33との間にチェーン50が懸架されている。
【0025】
上部側プーリー列15を構成する各プーリー(上部側回転体)41,42,43,45,46は、自由に又は軸40と一体的に回転するが、軸40自体は回転方向以外の自由度を持たない。そのため上部側プーリー列15を構成する各プーリー(上部側回転体)41,42,43,45,46は回転可能であるが、昇降方向には自由度を持たず、昇降は不能である。
【0026】
下部側プーリー列16は、柱本体35の下端近傍にあり、共通の軸55に5個のプーリー(下部側回転体)56,57,58,60,61が設けられたものである。ここで、5個のプーリー(下部側回転体)56,57,58,60,61の内、両端に設けられたプーリー56,61は、他のプーリー57,58,60に比べて外径が大きい。
また5個のプーリー(下部側回転体)56,57,58,60,61は、いずれもベアリング62を介して軸55に取り付けられており、自由回転する。
下部側プーリー列16に属するプーリー(下部側回転体)56,57,58,60,61についても回転可能であるが、昇降方向には自由度を持たない。
【0027】
昇降テーブル6は、小型のローラコンベアであり、平面視が四角形(略正方形)のテーブルフレーム63を有し、当該テーブルフレーム63に複数のローラ65が取り付けられたものである。ローラ65のいずれかにはモータ(図示せず)が内蔵されており、モータの動力によって回転する。
【0028】
昇降テーブル6の対向する二側面には、前記したテーブル側プーリー群20,21,22,23及び4個の直線ガイド25が設けられている。テーブル側プーリー群20,21,22,23及び4個の直線ガイド25の構造は、いずれも同一の構造であり、ブラケット67によって昇降テーブル6のテーブルフレーム63に取り付けられている。
ブラケット67は、外観形状が「ひ」の字状であり、取付けフランジ部85と左右側壁部86,87と奥壁部88を有している。
そして奥壁部88の外周面側に直線ガイド25が取り付けられている。
【0029】
テーブル側プーリー群20,21,22,23は、いずれも上側列テーブル側プーリー27と、下側列テーブル側プーリー28が一組になって上下二段に配置されている。本実施係形態では、テーブル側プーリー群20,21,22,23は、4群あるから、上下二段のプーリーの列の組み合わせが4セット存在する。
【0030】
上側列テーブル側プーリー27と下側列テーブル側プーリー28の構成は同一である。例えば上側列テーブル側プーリー27であれば図8の様に4個のプーリー(テーブル側回転体)70a,71a,72a,73aが共通の軸75aに取り付けられたものである。各プーリー70a,71a,72a,73aは、いずれもベアリング76を介して軸75aに取り付けられており、自由回転が可能である。
【0031】
下側列テーブル側プーリー28は、前記した上側列テーブル側プーリー27と対になって組を構成するものであり、上側列テーブル側プーリー27の真下の位置に設けられている。下側列テーブル側プーリー28についても4個のプーリー(テーブル側回転体)70b,71b,72b,73bが共通の軸75bに取り付けられたものである。各プーリー70b,71b,72b,73bはいずれもベアリング76を介して軸75bに取り付けられており、自由回転が可能である。
【0032】
またもう一方の門型フレーム8は、前記した門型フレーム7と同一の形状、構造である。
【0033】
次に本実施形態の昇降装置1の各部材の係合関係について説明する。本実施形態の昇降装置1では、門型フレーム7,8で囲まれた空間に昇降テーブル6が配されている。そして昇降テーブル6に設けられたブラケット67は、いずれも柱部10,11,12,13の凹部40内に入り込み、ブラケット67の外周側に取り付けられた直線ガイド25が、柱部内の直線レール17と係合している。
そのため昇降テーブル6は、4本のガイドレール17に沿って直線移動し、平行姿勢を保持して上下動する。
【0034】
また各柱部10,11,12,13の上端近傍には上部側プーリー列15があり、下端近傍には下部側プーリー列16があるから、昇降テーブル6の上側列テーブル側プーリー27と下側列テーブル側プーリー28は、上部側プーリー列15と下部側プーリー列16の間にある。
即ち昇降テーブル6に対して上部側に離れた位置に上部側プーリー列15があり、下部側に離れた位置に下部側プーリー列16がある。
【0035】
そして各プーリー列15,16,27,28にワイヤー(線状動力伝動部材)18が巻回されている。
本実施形態では、柱部10,11,12,13ごとに一本のワイヤー18が使用されており、合計4本のワイヤーが巻回されている。本実施形態では、各ワイヤー18は、それぞれ環状に繋がっている。
【0036】
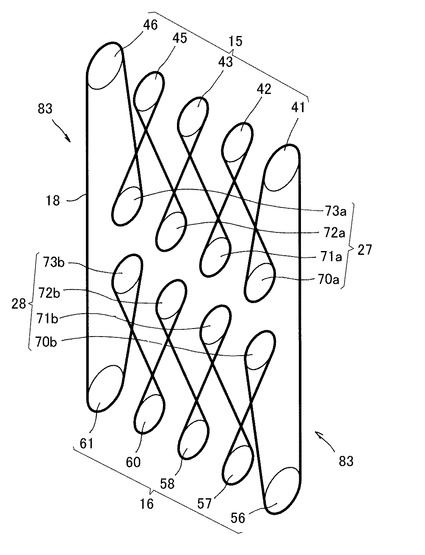
ワイヤーの巻回経路は、図10の通りであり、基本的に上部側プーリー列15と、上側列テーブル側プーリー27の間でワイヤー18が巻回され、さらに道中のいずれかで当該ワイヤー18が下側に回り込み、下部側プーリー列16と、下側列テーブル側プーリー28との間で同一のワイヤー18が巻回されて、再度上部側プーリー列15に戻る。
【0037】
巻回経路を図10、図11を参照してより詳細に説明する。例えば、上部側プーリー列15の中の端部に配されたプーリー41を基端として説明すると、上部側プーリー列15のプーリーから昇降テーブル6の上段側にある上側列テーブル側プーリー27のプーリー70aに昇降テーブル6側(以下、内側)からワイヤー18が懸架され、ワイヤー18は、プーリー70aの柱側(以下、外側)に回り込んで上部側プーリー列15の二番目のプーリー42に内側から係合する。この柱部10,11,12,13の上段側ではこの巻回を繰り返す。即ち、プーリー42、プーリー71a、プーリー43、プーリー72a、プーリー45、プーリー73a、プーリー46の順にワイヤー18が巻回されて行く。
【0038】
そして上部側プーリー列15の末端のプーリー46から下部側プーリー列16にワイヤー18が渡り、下部側プーリー列16の末端のプーリー61に懸架される。ここで上部側プーリー列15の末端のプーリー46及び下部側プーリー列16の末端のプーリー61は、共に他のプーリーに比べて直径が大きいので、ワイヤー18の渡り部分83は、他の部位に比べて立体的に離れる。そのためワイヤー18が交錯しない。
【0039】
そして下部側プーリー列16と下側列テーブル側プーリー28の間に順次ワイヤー18が懸架される。
下部側におけるワイヤー18の懸架経路は、前記した上部側と対称的である。
即ちワイヤー18は、上部側プーリー列15の末端のプーリー46から下部側プーリー列16の末端のプーリー61に内側から懸架される。
そして下部側プーリー列16のプーリー61の外側からワイヤー18が引き出され、下側列テーブル側プーリー28のプーリー73bの外側からワイヤー18が懸架される。さらにワイヤー18は、下側列テーブル側プーリー28のプーリー73bの内側から引き出され、下部側プーリー列16のプーリー60の内側から巻回される。
下段側ではこの巻回を繰り返す。即ち、プーリー61、プーリー73b、プーリー60、プーリー72b、プーリー58、プーリー71b、プーリー57,プーリー70b、プーリー56の順にワイヤー18が巻回されて行く。
そしてワイヤー18は、基端たる上部側プーリー列15の中の端部に配されたプーリー41に戻る。
このワイヤー18の渡り部分83についても、他の部位に比べて立体的に離れる。
【0040】
なお、基端として説明したプーリー41は、唯一の駆動プーリーとして機能するものであるから、図16の様に、360度以上に渡ってワイヤー18を係合させることが望ましい。即ちプーリー41には、ワイヤー18を二重巻きにすることが望ましい。
【0041】
次に本実施形態の昇降装置1の作用について説明する。
本実施形態の昇降装置1を使用する場合には、いずれかの位置でワイヤー18の走行を停止するか、ワイヤー18の走行に抵抗を設けた状態で、ギヤードモータ31を回転する。
その結果、ギヤードモータ31の回転力がチェーン50を経て軸40に伝動され、軸40が回転する。ここで軸40に装着されたプーリー41,42,43,45,46の内、端部のプーリー41は、キー49を介して軸40に取り付けられているので、軸40の回転と共にプーリー41が回転する。即ちプーリー41は、駆動プーリーとして機能する。本実施形態では、プーリー41が唯一の駆動プーリーであり、他のプーリーは、すべて従動プーリーである。
即ち軸40に装着された他のプーリー42,43,45,46は、いずれもベアリング47を介して軸40に取り付けられているので、空転する。
また上側列テーブル側プーリー27に属するプーリー70a,71a,72a,73a、下側列テーブル側プーリー28に属するプーリー70b,71b,72b,73b、下部側プーリー列16に属するプーリー56,57,58,60,61についても空転する。
【0042】
そして上部側プーリー列15に属するプーリー41,42,43,45,46と、下部側プーリー列16に属するプーリー56,57,58,60,61は、上下方向に固定されており、上側列テーブル側プーリー27に属するプーリー70a,71a,72a,73aと下側列テーブル側プーリー28に属するプーリー70b,71b,72b,73bは昇降可能である。
そのため本実施形態では、上部側プーリー列15に属するプーリー41,42,43,45,46と、下部側プーリー列16に属するプーリー56,57,58,60,61が定滑車として機能し、テーブル側プーリー列に属するプーリー70a,71a,72a,73a,70b,71b,72b,73bが動滑車として機能して昇降テーブル6を昇降させる。
【0043】
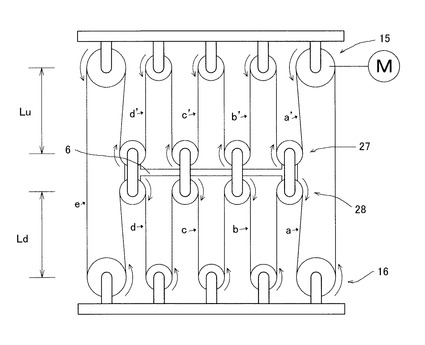
この原理について図12を参照しつつ説明する。
図12は、昇降装置1における各プーリー列15,16,27,28とワイヤー18の関係を模式的に説明するものである。
本実施形態では、基本的に上部側プーリー列15と、上側列テーブル側プーリー27の間でワイヤー18が巻回され、さらに道中のいずれかで当該ワイヤーが下側に回り込み、下部側プーリー列16と下側列テーブル側プーリー28との間で同一のワイヤー18が巻回されている。
【0044】
この状態で、例えばモータMで回動されるプーリー41から最も遠く、且つ上部側プーリー列15と、下部側プーリー列16を繋ぐ渡り部分Aでワイヤーの走行を強制的に停止し、この状態でギヤードモータ31を回動させる場合を考える。例えばプーリー41を図の様に反時計回りに回転させると、上部側プーリー列15と上側列テーブル側プーリー27との間では、ワイヤー18を繰り出すこととなる。そのため上部側プーリー列15と上側列テーブル側プーリー27との間の距離Luが広がる。
【0045】
逆に下部側プーリー列16と、下側列テーブル側プーリー28との関係では、ワイヤー18を巻き取る方向となるため、両者の間の距離Ldが縮まる。
そのため中間の昇降テーブル6は降下する。
同様の原理から、プーリー41を逆転すれば、上部側プーリー列15と上側列テーブル側プーリー27との間では、ワイヤー18が巻き取られ、下部側プーリー列16と、下側列テーブル側プーリー28との関係では、ワイヤー18が繰り出されることとなり、昇降テーブル6が上昇する。
【0046】
先の説明では、ワイヤー18を上部側プーリー列15と、下部側プーリー列16の渡り部分で停止させたが、他の部位で停止させても同様の機能を発揮する。
例えば図13の様に、下部側プーリー列16と、下側列テーブル側プーリー28の中途の位置Bでワイヤー18を停止させても、昇降テーブル6は昇降する。ただし、上部側の繰り出し量又は巻き取り量と、下部側の繰り出し量又は巻き取り量が不均一となり、昇降テーブル6は、両者のバランスによって昇降することとなり、昇降速度は早くなる。
【0047】
昇降テーブル6の昇降速度は、ワイヤー18を停止させる位置が、駆動プーリーたるプーリー41から遠くなる程、遅くなる。
図17の様に、駆動プーリーたるプーリー41に隣接したa位置でワイヤー18を停止させた場合の昇降テーブル6の昇降速度を基準速度Vとしたとき、b位置またはb’位置でワイヤー18を停止させた場合の昇降速度を基準速度は、V/2となる。
同様に、c位置またはc’位置でワイヤー18を停止させた場合の昇降速度を基準速度は、V/4となり、d位置またはd’位置でワイヤー18を停止させた場合の昇降速度を基準速度は、V/6となる。またe位置(図12ではA位置)でワイヤー18を停止させた場合の昇降速度を基準速度は、V/8となる。
昇降力は、速度に反比例する。
【0048】
本実施形態では、ギヤードモータ31を門型フレーム7,8に一台づつ設置したが、図14に示す昇降装置80の様に、一方の門型フレーム7にだけギヤードモータ31を設置し、対向する門型フレーム7と、門型フレーム8に一本のワイヤーを巻回してもよい。即ち柱部10と柱部12との間に渡りワイヤ−81を渡して、門型フレーム7側から、動力を門型フレーム8側に伝える。
同様に、柱部11と柱部13との間に渡りワイヤ−82を渡して、門型フレーム7側から動力を門型フレーム8側に伝える。
即ち本実施形態の昇降装置80では、門型フレーム7の柱部10内に内蔵された昇降機構のプーリーと、対向する位置にある柱部12内に内蔵された昇降機構のプーリーに同一のワイヤー18(渡りワイヤ−81)が巻回されている。
この様に、本実施形態の昇降装置80では、一本のワイヤー(線状動力伝動部材)18が一組の昇降機構に属する複数のプーリーと他の一組の昇降機構に属する複数のプーリーの双方に懸架されている。
【0049】
ワイヤー18の懸架経路は、図15の通りであり、基本的に上部側プーリー列15と、上側列テーブル側プーリー27の間でワイヤー18が巻回され、さらに道中のいずれかで当該ワイヤー18が下側に回り込み、下部側プーリー列16と、下側列テーブル側プーリー28との間で同一のワイヤー18が巻回される。
そして下部側プーリー列16と、下側列テーブル側プーリー28との間で同一のワイヤー18が巻回されている部位の中途で、ワイヤー18は他方の対向する位置の柱部12に渡り、同様に上部側プーリー列15と、上側列テーブル側プーリー27の間でワイヤー18が巻回され、下部側プーリー列16と、下側列テーブル側プーリー28との間で同一のワイヤー18が巻回される。
【0050】
上記した実施形態では、二つの柱部に対して一本のワイヤーを巻回したが、3以上の柱部にワイヤーを巻回してもよい。逆に、一つの柱部内のプーリーに複数のワイヤーを巻回してもよい。例えば、ワイヤー18の走行を阻止する部位(図12のA部)でワイヤー18を分断して2本のワイヤーとしてもよい。
【0051】
本実施形態では、ギヤードモータ31と、スプロケット33と、チェーン50と、スプロケット53及び軸40によって一連の駆動用動力伝動部材90が構成されているが、例えば、ギヤードモータ31によって軸40を直接回転するといったより簡単な駆動用動力伝動部材を使用してもよい。
【0052】
以上説明した実施形態では、線状動力伝動部材としてワイヤーを採用し、回転体としてプーリーを使用した。これらに代わって、ロープ又はベルトとプーリーとの組み合わせや、チェーンとスプロケットとの組み合わせを採用することもできる。しかしながら本発明においては、線状動力伝動部材と回転体との間に滑りを許すことが望ましいので、ワイヤー又はロープと、プーリーとの組み合わせを採用することが推奨される。
【0053】
以上説明した昇降装置1,80は、いずれもモータを動力として昇降テーブル6を昇降させるものであるから、油圧シリンダーを使用する装置の様に油が漏れたり、空圧シリンダーを使用する装置の様に排気による埃が出ない。そのため本実施形態の昇降装置1,80は、例えばクリーンルームの様な汚れを避けるべき場所で使用することもできる。
【0054】
また本実施形態の昇降装置1,80は、昇降させる物品の大きさや重さ、衝撃に対する強度に応じて、ユーザがワイヤー18を停止させる位置を変更し、昇降速度や昇降力を変更することもできる。
【0055】
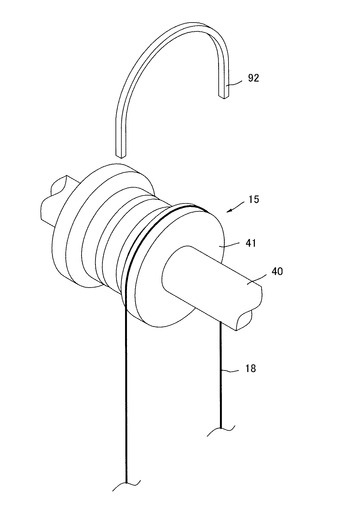
先に、駆動プーリたるプーリー41に、ワイヤー18を二重巻きする構成を説明したが、他の方策として、図18の様にプーリー41に押圧プーリ91や押圧ドラム(図示せず)を押し当て、ワイヤー18とプーリー41との接触力を強める方策も可能である。またプーリー41に図19の様な押圧バンド92や押圧ベルトを押し当てて、ワイヤー18とプーリー41との接触力を強める方策も可能である。
【符号の説明】
【0056】
1 昇降装置
2 コンベアライン
3 下段コンベア
5 上段コンベア
6 昇降テーブル
7,8 門型フレーム
10,11,12,13 柱部
15 上部側プーリー列
16 下部側プーリー列
17 直線レール
18 ワイヤー(線状動力伝動部材)
20,21,22,23 テーブル側プーリー群
25 直線ガイド
27 上側列テーブル側プーリー
28 下側列テーブル側プーリー
31 ギヤードモータ
41,42,43,45,46 プーリー(上部側回転体)
56,57,58,60,61 プーリー(下部側回転体)
63 テーブルフレーム
70a,71a,72a,73a プーリー(テーブル側回転体)
70b,71b,72b,73b プーリー(テーブル側回転体)
80 昇降装置
【特許請求の範囲】
【請求項1】
上下方向に自由度を持つ昇降テーブルと、昇降テーブルに回転自在に取り付けられた複数のテーブル側回転体と、昇降テーブルに対して上部側に離れた位置に昇降不能且つ回転自在に取り付けられた複数の上部側回転体と、昇降テーブルに対して下部側に離れた位置に昇降不能且つ回転自在に取り付けられた複数の下部側回転体と、線状動力伝動部材と、モータと、駆動用動力伝動部材を有し、
線状動力伝動部材が上部側回転体と一部のテーブル側回転体との間に懸架され、さらに同一又は他の線状動力伝動部材が下部側回転体と残るテーブル側回転体の一部又は全部との間に懸架され、かついずれかの線状動力伝動部材は上部側回転体と下部側回転体の双方に懸架されており、
少なくとも一つの上部側回転体又は一つの下部側回転体とモータの間に駆動用動力伝動部材が設けられていてモータの回転力が少なくとも一つの上部側回転体又は一つの下部側回転体に伝達され、線状動力伝動部材が走行して各回転体が回転し、
上部側回転体が回転してテーブル側回転体に対して線状動力伝動部材を繰り出す場合には下部側回転体は線状動力伝動部材をテーブル側回転体側から巻き取り、
上部側回転体が回転して線状動力伝動部材をテーブル側回転体側から巻き取る場合には下部側回転体はテーブル側回転体に対して線状動力伝動部材を繰り出して昇降テーブルを昇降させることを特徴とする昇降装置。
【請求項2】
複数のテーブル側回転体は、上下二列に並べて配置され、上側列に属するテーブル側回転体と上部側回転体との間に線状動力伝動部材が懸架され、下側列に属するテーブル側回転体と下部側回転体との間に線状動力伝動部材が懸架されていることを特徴とする請求項1に記載の昇降装置。
【請求項3】
線状動力伝動部材はワイヤー又はロープであり、一本の線状動力伝動部材が上部側回転体と一部のテーブル側回転体との間に懸架され、さらに同一の線状動力伝動部材が上部側回転体と下部側回転体の間に懸架され、さらに同一の線状動力伝動部材が下部側回転体と残るテーブル側回転体の一部又は全部との間に懸架され、さらに同一の線状動力伝動部材が下部側回転体と上部側回転体の間に懸架されていることを特徴とする請求項1又は2に記載の昇降装置。
【請求項4】
複数のテーブル側回転体と、複数の上部側回転体と、複数の下部側回転体から成る一組の昇降機構と、他の複数のテーブル側回転体と、他の複数の上部側回転体と、他の複数の下部側回転体から成る他の一組の昇降機構とを有し、
昇降テーブルは多角形であり、昇降テーブルの一辺に一組の昇降機構に属する複数のテーブル側回転体があり、昇降テーブルの対向する一辺に他の一組の昇降機構に属する複数のテーブル側回転体があり、各組の複数の上部側回転体と、複数の下部側回転体はそれぞれの組に属する複数のテーブル側回転体の上下の位置にあり、
線状動力伝動部材はワイヤー又はロープであり、一本の線状動力伝動部材が一組の昇降機構に属する複数の回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されていることを特徴とする請求項1乃至3のいずれかに記載の昇降装置。
【請求項5】
4組の昇降機構を有し、その内の2組の昇降機構は対向する位置にあって一本の線状動力伝動部材が一組の昇降機構に属する複数回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されており、
他の2組の昇降機構は対向する位置にあって一本の線状動力伝動部材が一組の昇降機構に属する複数回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されていることを特徴とする請求項4に記載の昇降装置。
【請求項1】
上下方向に自由度を持つ昇降テーブルと、昇降テーブルに回転自在に取り付けられた複数のテーブル側回転体と、昇降テーブルに対して上部側に離れた位置に昇降不能且つ回転自在に取り付けられた複数の上部側回転体と、昇降テーブルに対して下部側に離れた位置に昇降不能且つ回転自在に取り付けられた複数の下部側回転体と、線状動力伝動部材と、モータと、駆動用動力伝動部材を有し、
線状動力伝動部材が上部側回転体と一部のテーブル側回転体との間に懸架され、さらに同一又は他の線状動力伝動部材が下部側回転体と残るテーブル側回転体の一部又は全部との間に懸架され、かついずれかの線状動力伝動部材は上部側回転体と下部側回転体の双方に懸架されており、
少なくとも一つの上部側回転体又は一つの下部側回転体とモータの間に駆動用動力伝動部材が設けられていてモータの回転力が少なくとも一つの上部側回転体又は一つの下部側回転体に伝達され、線状動力伝動部材が走行して各回転体が回転し、
上部側回転体が回転してテーブル側回転体に対して線状動力伝動部材を繰り出す場合には下部側回転体は線状動力伝動部材をテーブル側回転体側から巻き取り、
上部側回転体が回転して線状動力伝動部材をテーブル側回転体側から巻き取る場合には下部側回転体はテーブル側回転体に対して線状動力伝動部材を繰り出して昇降テーブルを昇降させることを特徴とする昇降装置。
【請求項2】
複数のテーブル側回転体は、上下二列に並べて配置され、上側列に属するテーブル側回転体と上部側回転体との間に線状動力伝動部材が懸架され、下側列に属するテーブル側回転体と下部側回転体との間に線状動力伝動部材が懸架されていることを特徴とする請求項1に記載の昇降装置。
【請求項3】
線状動力伝動部材はワイヤー又はロープであり、一本の線状動力伝動部材が上部側回転体と一部のテーブル側回転体との間に懸架され、さらに同一の線状動力伝動部材が上部側回転体と下部側回転体の間に懸架され、さらに同一の線状動力伝動部材が下部側回転体と残るテーブル側回転体の一部又は全部との間に懸架され、さらに同一の線状動力伝動部材が下部側回転体と上部側回転体の間に懸架されていることを特徴とする請求項1又は2に記載の昇降装置。
【請求項4】
複数のテーブル側回転体と、複数の上部側回転体と、複数の下部側回転体から成る一組の昇降機構と、他の複数のテーブル側回転体と、他の複数の上部側回転体と、他の複数の下部側回転体から成る他の一組の昇降機構とを有し、
昇降テーブルは多角形であり、昇降テーブルの一辺に一組の昇降機構に属する複数のテーブル側回転体があり、昇降テーブルの対向する一辺に他の一組の昇降機構に属する複数のテーブル側回転体があり、各組の複数の上部側回転体と、複数の下部側回転体はそれぞれの組に属する複数のテーブル側回転体の上下の位置にあり、
線状動力伝動部材はワイヤー又はロープであり、一本の線状動力伝動部材が一組の昇降機構に属する複数の回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されていることを特徴とする請求項1乃至3のいずれかに記載の昇降装置。
【請求項5】
4組の昇降機構を有し、その内の2組の昇降機構は対向する位置にあって一本の線状動力伝動部材が一組の昇降機構に属する複数回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されており、
他の2組の昇降機構は対向する位置にあって一本の線状動力伝動部材が一組の昇降機構に属する複数回転体と他の一組の昇降機構に属する複数の回転体の双方に懸架されていることを特徴とする請求項4に記載の昇降装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図17】
【図18】

【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−1463(P2013−1463A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−130682(P2011−130682)
【出願日】平成23年6月10日(2011.6.10)
【出願人】(592026819)伊東電機株式会社 (71)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月10日(2011.6.10)
【出願人】(592026819)伊東電機株式会社 (71)
[ Back to top ]