
映像ノイズ検知装置
【課題】映像ノイズの検出を自動で行うことができる映像ノイズ検知装置を提供する。
【解決手段】映像ノイズ検知装置100は、入力された映像信号を構成する任意のフレームである入力フレーム映像、当該入力フレーム映像より所定のフレーム数だけ前のフレームである第1のフレーム映像、及び、当該第1のフレーム映像より所定のフレーム数だけ前のフレームである第2のフレーム映像を出力するフレーム出力部としてのメモリコントローラ101と、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像に基づいてノイズ判定情報を算出する判定情報算出部104と、この判定情報算出部104で算出されたノイズ判定情報に基づいて映像信号に含まれるノイズを判定するノイズ判定部105と、を有する。
【解決手段】映像ノイズ検知装置100は、入力された映像信号を構成する任意のフレームである入力フレーム映像、当該入力フレーム映像より所定のフレーム数だけ前のフレームである第1のフレーム映像、及び、当該第1のフレーム映像より所定のフレーム数だけ前のフレームである第2のフレーム映像を出力するフレーム出力部としてのメモリコントローラ101と、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像に基づいてノイズ判定情報を算出する判定情報算出部104と、この判定情報算出部104で算出されたノイズ判定情報に基づいて映像信号に含まれるノイズを判定するノイズ判定部105と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、映像ノイズ検知装置に関する。
【背景技術】
【0002】
現在の映像編集作業は主にテープ素材を一旦編集機材へ映像データとして転送し、編集を行い、再度テープへ出力するといったワークフローにより行われている。このような編集作業においては、映像データの転送時に、映像データではないノイズが入り込んでしまうことがあり、その確認は人の目視によって行われている。また、放送においては映像データの転送時に、放送機材をいくつも介し、さらに伝送回線も介ししており、この転送過程の途中で同じく映像にノイズが乗ってしまうことがある。このようなノイズとしてはフリーズや、ブラックアウトなどがあり、その検知には一部自動監視装置が導入されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−079752号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、自動監視装置でノイズを検出する方法を用いても、細かいノイズは検知できないため、こちらもほとんどが目視で監視されているのが現状である。
【0005】
本発明はこのような課題に鑑みてなされたものであり、現状目視で行われている映像ノイズの検出を自動で行うことができる映像ノイズ検知装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を解決するために、本発明に係る映像ノイズ検知装置は、入力された映像信号を構成する任意のフレームである入力フレーム映像、当該入力フレーム映像より所定のフレーム数だけ前のフレームである第1のフレーム映像、及び、当該第1のフレーム映像より所定のフレーム数だけ前のフレームである第2のフレーム映像を出力するフレーム出力部と、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像に基づいてノイズ判定情報を算出する判定情報算出部と、この判定情報算出部で算出されたノイズ判定情報に基づいて映像信号に含まれるノイズを判定するノイズ判定部と、を有する。
【0007】
このような映像ノイズ検知装置において、判定情報算出部は、同一座標に設定された部分領域により、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像を走査して、当該部分領域間の部分相関を算出し、ノイズ判定部は、この部分相関に基づいてノイズを判定することが好ましい。
【0008】
このとき、ノイズ判定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像を走査したときに、ノイズを検出した部分領域の数をカウントし、この部分領域の数が所定の閾値以上の場合にノイズとして検出することが好ましい。
【0009】
あるいは、ノイズ判定部は、入力フレーム映像と第2のフレーム映像との間の部分相関は高く、且つ、入力フレーム映像と第1のフレーム映像との間の部分相関が低い場合に、ノイズとして検出することが好ましい。
【0010】
あるいは、ノイズ判定部は、入力フレーム映像と第2のフレーム映像との間の部分相関が高く、且つ、入力フレーム映像と第1のフレーム映像との間の部分相関が低い場合に、予め想定されるノイズパターンと第1のフレーム映像の部分領域との相関を求め、当該相関が高い場合にノイズとして検出することが好ましい。
【0011】
あるいは、ノイズ判定部は、入力フレーム映像と第2のフレーム映像との間の部分相関が低く、且つ、入力フレーム映像と第1のフレーム映像との間の部分相関に予め想定される特徴パターンがある場合にノイズとして検出することが好ましい。
【0012】
あるいは、ノイズ判定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像との間の部分相関に予め想定される特徴パターンがある場合にノイズとして検出することが好ましい。
【0013】
また、このような映像ノイズ検知装置において、判定情報算出部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像の間の全体相関を算出し、ノイズ判定部は、全体相関が所定の閾値より小さい場合に、部分相関によるノイズ判定を行わないことが好ましい。
【0014】
また、このような映像ノイズ検知装置において、判定情報算定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像の同一座標の画素毎に当該画素の輝度値を用いて、(入力フレーム映像+第2のフレーム映像)−(第1のフレーム映像)×2の演算を行い、ノイズ判定部は、この演算結果から予め想定されるノイズパターンを抽出してノイズ判定を行うことが好ましい。
【0015】
また、このような映像ノイズ検知装置において、判定情報算定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像からそれぞれの特徴量を算出し、ノイズ判定部は、この特徴量を比較してノイズ判定を行うことが好ましい。
【0016】
このとき、判定情報算定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像のうちいずれか2つの映像を選択し、それぞれの映像において、水平ライン毎にラインノイズの特徴となる垂直エッジ画素数の総和及び上下の複数の水平ラインとの関係を特徴量として算出することが好ましい。
【0017】
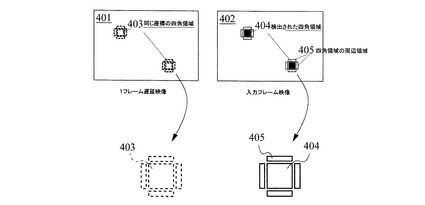
あるいは、判定情報算定部は、入力フレーム映像若しくは第1のフレーム映像においてブロック状のノイズの特徴となる四角領域を検出し、入力フレーム映像若しくは第1のフレーム映像における四角領域の内部及び周辺領域と、当該映像より遅延された映像における四角領域に対応する領域の内部及び周辺領域との相関関係を特徴量として算出することが好ましい。
【0018】
あるいは、判定情報算定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像毎にショートラインノイズの特徴である短く連続する垂直エッジを検出し、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像の間の垂直エッジの総量の変化を特徴量として算出することが好ましい。
【発明の効果】
【0019】
本発明に係る映像ノイズ検知装置を以上のように構成すると、映像ノイズの検出を自動で行うことができる。
【図面の簡単な説明】
【0020】
【図1】映像ノイズ検査装置の一実施例を示すブロック図である。
【図2】部分相関処理を説明するための説明図である。
【図3】ラインノイズの検出方法を説明するための説明図であって、(a)はラインノイズ開始の検出方法を示し、(b)はラインノイズ終了の検出方法を示す。
【図4】ブロックノイズの検出方法を説明するための説明図である。
【図5】白点・黒点ノイズの検出方法を説明するための説明図である。
【図6】ストライプ状フリーズ及びストライブ状ブラックの検出方法を説明するための説明図である。
【図7】ショートラインノイズの検出方法を説明するための説明図である。
【発明を実施するための形態】
【0021】
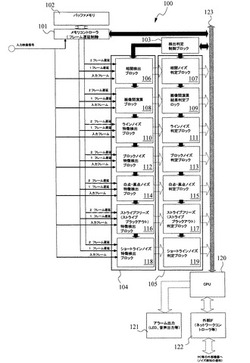
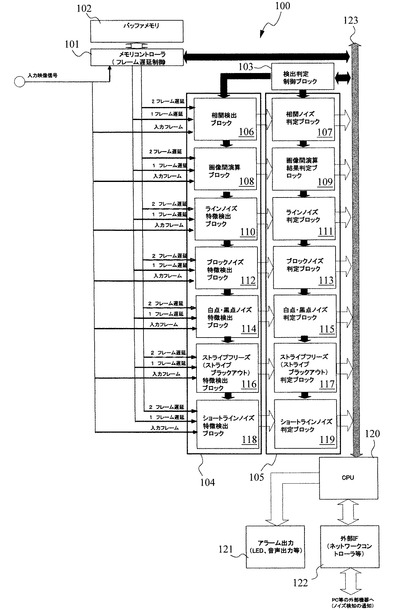
以下、本発明の好ましい実施形態について図面を参照して説明する。まず、図1を用いて本実施形態に係る映像ノイズ検知装置の構成について説明する。この映像ノイズ検知装置100は、入力映像信号(デジタル信号)から任意のフレーム遅延信号(例えば1フレーム遅延及び2フレーム遅延の信号を作成し、入力映像信号と合わせて3フレーム分の信号)を作成するフレーム出力部としてのメモリコントローラ101と、3フレーム分の信号からノイズを判定するための情報を算出する判定情報算出部104と、算出された情報から入力映像信号にノイズが発生しているか否かを判定するノイズ判定部105と、を有している。なお、判定情報算出部104としては、3フレーム分の信号から相関関係を求めて判定情報を算出する方法や、画像間演算を行って判定情報を算出する方法や、ブロック状のノイズ、ライン状のノイズ、白点・黒点ノイズ、ストライプ状のフリーズ、ストライプ状のブラックアウト、及び、ショートラインノイズの特徴を判定情報として検出する方法が用いられる。なお、映像ノイズとしては、目視において見落としやすい、1フレームから数フレームのみ一瞬発生するノイズが存在するが、本実施形態に係る映像ノイズ検知装置100は、特にこれらについて検出が行える構成としている。
【0022】
入力映像信号はデジタル映像で、SDI(Serial Digital Interface)やアナログ信号をAD変換したもの等で構成される(ビット数は任意で通常は8〜20bit程度)。入力されたデジタル映像信号(入力フレーム映像)は、メモリコントローラ101に取り込まれ、バッファメモリ102へ書き込まれる。このときバッファメモリ102はリングバッファ構成により複数のフレームを残しておくことができる。また、メモリコントローラ101は書込みと同時に読み出しを行うことができ、任意の過去に書き込んだフレームを複数同時に出力することができる。ここではバッファメモリ102とメモリコントローラ101によりにより1フレーム遅延した信号である1フレーム遅延映像(第1のフレーム映像)及び2フレーム遅延した信号である2フレーム遅延映像(第2のフレーム映像)が作られる。なお、ノイズとして、複数フレーム以上離れた画像間での相関により検出できるものがある場合は、任意のフレーム数だけ遅延させたフレーム遅延信号を出力して使用することも可能である。このようにして遅延された1フレーム遅延映像及び2フレーム遅延映像と入力フレーム映像とを合わせた3フレーム分の映像は判定情報算出部104に入力される。
【0023】
ここで、判定情報算出部104は、フレーム間の全体相関又は部分相関を求める相関検出ブロック106と、画像間演算を行う画像間演算ブロック108と、ラインノイズの特徴を検出するラインノイズ特徴検出ブロック110と、ブロック状ノイズの特徴を検出するブロックノイズ特徴検出ブロック112と、白点・黒点ノイズの特徴を検出する白点・黒点ノイズ特徴検出ブロック114と、ストライプ状フリーズ(若しくはストライプ状ブラックアウト)の特徴を検出するストライプフリーズ特徴検出ブロック116と、ショートラインノイズの特徴を検出するショートラインノイズ特徴検出ブロック118と、から構成され、メモリコントローラ101から出力された3フレーム分の映像はそれぞれのブロックに入力されるように構成されている。また、ノイズ判定部105には、上述の判定情報算出部104を構成するブロックに対応して、相関ノイズ判定ブロック107と、画像間演算結果判定ブロック109と、ラインノイズ判定ブロック111と、ブロックノイズ判定ブロック113と、白点・黒点ノイズ判定ブロック115と、ストライプフリーズ判定ブロック117と、ショートラインノイズ判定ブロック119と、が設けられている。
【0024】
なお、どの方法によりノイズの検知を行うかを切り替えるために、検出判定制御ブロック103が設けられており、CPUバス123で接続されたCPU120からの制御信号により、この検出判定制御ブロック103が判定情報算出部104及びノイズ判定部105の作動を制御するように構成されている。また、ノイズ判定部105を構成する各々のブロックから出力される判定結果もCPUバス123を介してCPU120に送信され、LEDや音声出力から構成されるアラーム出力121を介してノイズ検知が報知されたり、ネットワークコントローラ等からなる外部インタフェース122を介してPC等の外部機器へノイズ検知の通知が行われる。もちろん、判定情報算出部104及びノイズ判定部105にすべてのブロックを設ける必要はなく、映像ノイズを検出するための方法を適宜選択して実装することができる。
【0025】
それでは、判定情報算出部104及びノイズ判定部105を構成する各ブロックにおけるノイズ検知の方法について以下に説明する。
【0026】
[相関検出]
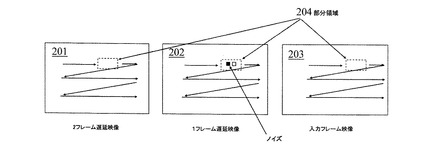
相関検出ブロック106は、各フレーム映像の輝度値を用いて、入力フレーム映像と1フレーム遅延映像との間、入力フレーム映像と2フレーム遅延映像との間、及び、1フレーム遅延映像と2フレーム遅延映像との間で全体相関、及び、各フレームの同一の座標での部分相関を計算する。ここで、部分相関の求め方について図2を用いて説明する。なお、以降の説明において、図2に示すように、あるフレームの左上隅から1画素毎に水平方向に処理をして行き、右端に到達すると、一つ下(1画素下のライン)に移動して左端から右端に向かって水平方向に処理をし、この操作をフレームの右下隅まで繰り返し行うことを「水平走査」と呼ぶ。
【0027】
部分相関では図2に示す、2フレーム遅延映像201、1フレーム遅延映像202、及び、入力フレーム映像203のそれぞれにおいて、同じ座標位置に、所定の大きさ(例えば、16×8画素)を有する部分領域204を設定し、それぞれのフレーム間で相関を取る処理を水平走査により行う。すなわち、部分領域204は水平方向へ1画素ずつ移動させて部分相関を求め、また、垂直方向へも1画素ずつ移動させて部分相関を求める。例えば、図2に示すように、1フレーム遅延映像202に瞬間的なノイズが存在する場合には、2フレーム遅延映像201と入力フレーム映像203との間の相関が高いのに対して、2フレーム遅延映像201と1フレーム遅延映像202との間、及び、1フレーム遅延映像202と入力フレーム映像203との間の相関が低くなるため、この瞬間的なノイズを検出することができる。
【0028】
また、テープからの再生ノイズにおいては、相関関係に特徴的なパターンが現れるため、このパターンを検知することでノイズと判定することができる。例えば、入力フレーム映像203と2フレーム遅延映像201との間の部分相関が高く、且つ、入力フレーム映像203と1フレーム遅延映像202の部分相関が低い場合に、予め想定されるノイズパターンと1フレーム遅延映像202の部分領域204との相関を求め、当該相関が高い場合にノイズとして検出することができる。あるいは、入力フレーム映像203と2フレーム遅延映像201との間の部分相関が低く、入力フレーム映像203と1フレーム遅延映像202との間の部分相関に予め想定される特徴パターンが見られる場合にノイズとして検出することができる。さらに、入力フレーム映像203、1フレーム遅延映像202及び2フレーム遅延映像201の間の部分相関に予め想定される特徴パターンが見られる場合にノイズとして検出することもできる。
【0029】
このようにして求められた相関の結果は、相関ノイズ判定ブロック107に渡され、ここで相関関係及び相関のパターンとの比較が行われノイズが検知されたかを判断する。例えば、ノイズが検出された部分領域の数をカウントし、その数が所定の閾値を超えたときにノイズを検出することができる。そして、上述した様に、最終的にはCPU120がこの情報を読み出し、装置のアラーム出力121や、外部インタフェース122を介した通知でPC等の外部機器に対してエラーの検知(映像ノイズの検知)を通知する。ここで、相関ノイズ判定ブロック107は、部分相関の結果からノイズを検出した場合には、どのフレームのどの位置(例えば、フレーム内の画素の座標で表す)でノイズが発生したのかをCPU120に出力するように構成することも可能である。なお、全体相関は、全体の画面として動きがあるかを確認するために使用される。全体に動きが大きい場合、すなわち、映像間の全体相関が所定の閾値より小さい場合には、部分的なノイズの誤検知が発生する為、このときの部分相関より検知されたノイズは最終的にはノイズと判定しない。
【0030】
また、以上の説明では、入力フレーム映像203、1フレーム遅延映像202及び2フレーム遅延映像201の間で部分相関及び全体相関を求めてノイズを検出するように構成した場合について説明したが、これら3つの映像201〜203のうち、いずれか2つを選択して部分相関及び全体相関を求めてノイズを検出するように構成することも可能である。
【0031】
[画像間演算]
画像間演算ブロック108は、メモリコントローラ101から入力された2フレーム遅延映像、1フレーム遅延映像及び入力フレーム映像の同一位置の画素毎に当該画素の輝度値を用いて、(入力フレーム映像+2フレーム遅延映像)−(1フレーム遅延映像)×2の計算を行う。すなわち、上記演算を行うことにより、変化の少ない画素はほぼゼロになり、反対に、1フレーム遅延映像にノイズが乗っている場合にはそのノイズによる輝度値だけが2倍されて出力されるため、ノイズの検出を容易に行うことができるからである。そして、画像間演算結果判定ブロック109は、あらかじめ想定されるノイズパターンを先の演算結果から抽出してノイズを検出し、エラーの検知を通知する。なお、画像間演算ブロック108において、上記画像間演算と同時に入力フレーム映像と2フレーム遅延映像におけるエッジの多い領域を求め、先の計算結果においてノイズを検出する領域から除外することにより、ノイズの検出精度を向上させることができる。これは、エッジの多い領域はノイズと正しい映像との区別がつきにくいためである。なお、部分領域を設定し、それぞれの映像においてこの部分領域を水平走査しながら上記画像間演算を行っても良い。
【0032】
[ラインノイズ特徴検出]
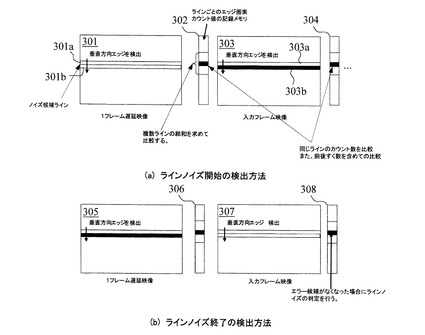
ラインノイズ特徴検出ブロック110は、図3(a)に示すように、入力フレーム映像303と1フレーム遅延映像301を用いてノイズの検出を行う。ここで、ラインノイズは横方向にエッジが並ぶ特徴があるため、ある画素のライン(図3(a)のライン301a,303a)とその画素の一つ下のライン(図3(a)のライン301b,303b)において画素毎に輝度値を比較し、所定の閾値以上の差があるときにそれらの画素の間に垂直エッジがあるとして検出し、その画素数を水平方向に足し込んで、ラインごとのエッジ量(エッジ画素カウント値)とする。このライン毎のエッジ量は、フレーム毎に設けられ、ライン毎に記録することができるエッジ画素カウント値記録メモリ302,304へ記録していく。以上のようにして、入力フレーム映像303と1フレーム遅延映像301の全てのラインに対してライン毎のエッジ量が記録されると、ラインノイズ判定ブロック111は、入力フレーム映像303と1フレーム遅延映像301との間で、ライン毎のエッジ画素カウント値記録メモリ302,304の値を比較し、1フレーム遅延映像301に対して入力フレーム映像303のエッジ量が急激に増えているラインをラインノイズ候補とする。
【0033】
また、もともと斜めの線がその近辺にあり、それがたまたま水平に変化することも考えられる為、ラインノイズ判定ブロック111は、上下数ラインのエッジ量の総和を求めてこれについても入力フレーム映像303と1フレーム遅延映像301の間で比較を行う。斜めの線が移動して水平になった場合には、1フレーム遅延映像301と入力フレーム映像303における上下数ラインのエッジ量の総和の変化が少なくなるからである。そして、上記でラインノイズ候補となったラインについて、上下数ラインのエッジ量の総和の差が閾値以上で明らかにラインが急激に現れたと判断される場合は、ラインノイズ発生開始としてラインごとに記録を行う。
【0034】
ラインノイズ発生開始となっているラインについて、図3(b)に示すように、ラインノイズ特徴検出ブロック110により、次以降の入力フレーム映像307と1フレーム遅延映像305との間でもラインのエッジ量を算出し、ライン毎のエッジ画素カウント値記録メモリ306,308に記憶させ、ラインノイズ判定ブロック111において、このようにして算出されたエッジ量及び、上下数ラインのエッジ量の総和の比較を行う。変化が閾値以下の場合は、継続してラインノイズが発生していると判断する。また1フレーム遅延映像305に比べて入力フレーム映像307のエッジ量が急激に減り、且つエッジ量の総和も急激に減った場合には、ラインノイズ終了候補とする。このとき、ライン毎にラインノイズが発生したフレームから終了したフレームまでのフレーム数をラインノイズ発生継続フレーム数として記憶しておく。
【0035】
ラインノイズ判定ブロック111においてラインノイズ開始判定が間違っていた場合(映像中のラインをノイズと判定してしまっていた場合)にはラインの上下数ライン以内に急激なライン変化(ラインノイズ発生開始のラインが存在)が存在することになる。そのため、ラインノイズ判定ブロック111は、このラインノイズ発生開始のラインが上下数ライン以内に存在する場合には、ラインノイズではなかったと判断する。
【0036】
ラインノイズ判定ブロック111は、以上のようにしてラインノイズ終了候補で上下数ライン以内にラインノイズ発生開始のラインが存在しない場合で、そのラインのラインノイズ発生継続フレーム数が閾値以下の時にラインノイズ発生と判断し、CPU120を介して通知が行われる。
【0037】
[ブロックノイズ特徴検出]
ブロックノイズ特徴検出部ブロック112は、図4に示すように入力フレーム映像402と1フレーム遅延映像401との比較を行い、入力フレーム映像402に四角状の領域404が検出された場合に、ブロック状ノイズの候補とする。そして、ブロックノイズ判定ブロック113は、その候補の領域内部404と四角領域の周辺領域405について比較を行い、下記の条件(1),(2)を満たした場合にノイズと判定する。(1)まず、四角領域404の内部輝度または色が1フレーム遅延映像401の同じ座標の四角領域403に比べて急激に変化していて、且つ四角領域の周辺領域405の輝度または色の変化が小さい場合で、この条件を満たす領域の数が閾値以上の場合。(2)四角領域404の内部輝度または色が急激に変化している場合で画像全体におけるこの条件を満たす領域の数が閾値以上の場合。なお、条件(1)の閾値は小さめに設定して、数が少なくてもノイズとすることが望ましい。また、条件(2)の閾値は大きめに設定して数が多い場合のみノイズとすることが望ましい。上記判定条件によりノイズとして検知されるとCPU120を介して通知が行われる。
【0038】
具体的には以下の手順でノイズの検出が行われる。まず、ブロックノイズ特徴検出ブロック112は、入力フレーム映像402に対して、所定の大きさを有する領域(例えば、8×8画素の領域)を設定し、この領域を水平方向に1画素ずつ移動し、また、垂直方向に1画素ずつ移動させて水平走査を行い、四角領域404のエッジ検出を行う。入力フレーム映像402の左上隅から右下隅にかけて水平走査を行うと、まず、四角領域404の左上隅の角が検出される。すると、ブロックノイズ判定ブロック113は、入力フレーム映像402における四角領域404の左上側の輝度又は色の変化と周辺領域405の輝度又は色の変化、及び、1フレーム遅延画像401の同じ座標の四角領域403の輝度又は色の変化を取得する。そして、水平走査を続け、四角領域403,404及び周辺領域405の輝度又は色を取得するとともに、四角領域の右上、左下、及び右下を検出する。そして、このようにして検出された四角領域404が、上記条件(1),(2)を満足するか否かを判定し、満足する場合は、領域の数のカウントを行う。最後に、検出された四角領域404の数をブロックノイズ判定ブロック113に渡し、この領域の数が上記判定条件を満たしているときは、ノイズとして検知する。このように、入力フレーム映像402に対して水平走査を行い四角領域404のエッジを見つける度に、上記判定処理を行うことにより、検出のために使うメモリのサイズを小さくすることができる。なお、検出された四角領域404が、水平方向で4〜50画素、垂直方向で4〜20画素以内のときに、ブロックノイズとして判断することにより検出精度を向上させることができる。
【0039】
なお、以上の説明では、入力フレーム映像402及び1フレーム遅延映像401の間でブロックノイズを検出するように構成した場合について説明したが、1フレーム遅延映像と2フレーム遅延映像との間でブロックノイズを検出するように構成することも可能である。
【0040】
[白点・黒点特徴検出]
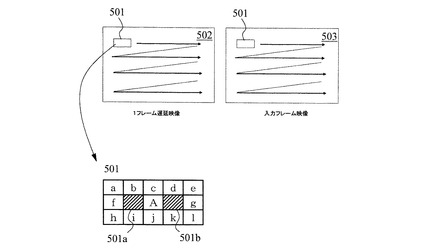
白点・黒点ノイズ特徴検出ブロック114は、図5に示すように入力フレーム映像503と1フレーム遅延映像502に対して検出領域501による水平走査を行うことにより比較を行う。ここで、検出領域501は、5×3画素の領域であって、この検出領域501の中央にある画素Aが白点又は黒点であるかを周囲の画素(a〜lで示している)の輝度値から判定するものである。白点・黒点ノイズ特徴検出ブロック114は、入力フレーム映像503及び1フレーム遅延映像502に対して検出領域501を水平方向に1画素ずつ移動し、また、垂直方向に1画素ずつ移動させて水平走査を行い白点及び黒点の判定を行う。なお、1フレーム遅延映像502では白点・黒点ノイズが検出されないが、入力フレーム映像503で白点・黒点ノイズが検出された場合に、ノイズとする。また、このノイズの検出は、瞬間的なものを検出したい場合は入力フレーム映像503と1フレーム遅延映像502の比較を行うが、継続のものを含めて検出したい場合には、入力フレーム映像503のみで検出を行う。また、厳密に継続していないことを判断する為には、2フレーム遅延映像に対しても水平走査をして、ノイズが発生していないことを条件とする。
【0041】
白点、黒点の判定条件は以下とする。
(1)周囲の値計算
まず、上述の検出領域501を構成するa〜lの画素の輝度値を用いて、これらの画素の輝度値の加重平均、最大値及び最小値を以下の式により求める。
加重平均 (a+b+(c*2)+d+e+(f*2)+(g*2)+h+i+(j*2)+k+l)/16 (領域)
最大値 max(a,b,c,d,e,f,g,h,i,j,k,l)
最小値 min(a,b,c,d,e,f,g,h,i,j,k,l)
(2)白点の判定
そして、判定対象の画素Aの輝度値を、周辺画素の加重平均、最大値及び最小値と比較し、以下の条件を満足するとき、この判定対象の画素Aを白点であると判定する。すなわち、(i)最大値と最小値との差が所定の閾値以下であり、(ii)加重平均と画素Aの輝度値との差が所定の閾値以上で且つ加重平均より画素Aの輝度値が大きく、(iii)最大値と画素Aの輝度値との差が所定の閾値以上で且つ最大値より画素Aの輝度値が大きく、(iv)画素Aの輝度値が所定の閾値以上の場合である。
(3)黒点の判定
同様に、判定対象の画素Aの輝度値を、周辺画素の加重平均、最大値及び最小値と比較し、以下の条件を満足するとき、この判定対象の画素Aを黒点であると判定する。すなわち、(i)最大値と最小値との差が所定の閾値以下であり、(ii)加重平均と画素Aの輝度値との差が所定の閾値以上で且つ加重平均より画素Aの輝度値が小さく、(iii)最小値と画素Aの輝度値との差が所定の閾値以上で且つ最小値より画素Aの輝度値が小さく、(iv)画素Aの輝度値が所定の閾値以下の場合である。
【0042】
白点・黒点ノイズ判定ブロック115は、以上の処理により白点・黒点ノイズ特徴検出ブロック114により検出された白点若しくは黒点ノイズの数をカウントし、検出されたノイズの数が閾値以上の場合にノイズとして検知してCPU120を介して通知を行う。
【0043】
なお、検出領域501の設定は図5のように、中央の画素Aの両側の画素501a,501bを判定に使用しないようにしている。これはHD(High Definition)の画像で1920×1080のサイズの画像が1440×1080の元画像から作成されている場合に水平方向に補間が行われ、白点、黒点がうまく検出できない場合があるためである。
【0044】
[ストライプフリーズ(ストライプブラックアウト)特徴検出]
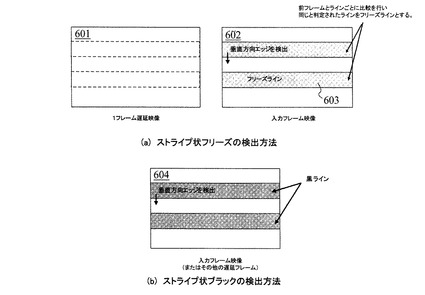
ストライプフリーズ特徴検出ブロック116においては、図6(a)に示すように、入力フレーム映像602及び1フレーム遅延映像601の比較を行い、同一の位置にあるラインの画素ごとに相関を求め、閾値以上の相関の高い画素の数が水平ラインを構成する画素数に対して閾値以上あるラインをフリーズラインとする。同時にフリーズしている画素に対する垂直方向のエッジを検出して(エッジの検出方向はラインノイズ特徴検出ブロック110と同じ方法を用い、水平方向に並ぶ上下の画素の輝度値を比較して求める)水平ライン方向にこのエッジ数(画素数)をカウントし、そのカウント値が閾値以上あるラインをフリーズ境界ラインとする。
【0045】
ストライプフリーズ判定ブロック117は、フリーズラインが閾値以上でフリーズ境界ラインが閾値以上ある場合にストライプ状フリーズとして検知してCPU120を介して通知を行う。
【0046】
またストライプ状のブラックアウトについても、上記と同じような検出が可能である。図6(b)に示すように、入力フレーム映像又はその他の遅延フレーム映像604において、黒画素が閾値以上あるラインをブラックラインとして、その境界エッジを求めて、閾値以上のものをブラック境界ラインとし、ブラックラインが閾値以上で、ブラック境界ラインが閾値以上のものをストライプ状ブラックアウトとして検知してCPU120を介して通知する。ただし、ストライプ上のブラックアウトは複数のフレームでなくても検知可能である。
【0047】
[ショートラインノイズ特徴検出]
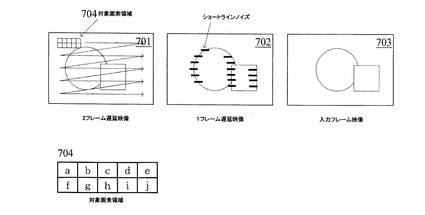
ショートラインノイズ特徴検出ブロック118は、図7に示すように入力フレーム映像703と1フレーム遅延映像702及び2フレーム遅延映像701のそれぞれに対して、対象画素領域704による水平走査を行い、以下の条件(1),(2)の両方を満たす画素数をカウントする。なお、対象画素領域704は、図7に示すよう2×5画素で構成し、各画素にa〜jの符号を付した場合、各画素a〜jの輝度値を用いて以下の条件式により判定する。
【0048】
(カウント画素の判定条件)
(1)(a>f+閾値 && b>g+閾値 && c>h+閾値 && d>i+閾値 && e>j+閾値)
|| (f>a+閾値 && g>b+閾値 && h>c+閾値 && i>d+閾値 && j>e+閾値)
(2)条件(1)を満たす画素が水平方向に所定の長さ以上続く(例えば2画素以上16画素以下続く)
【0049】
次に、入力フレーム映像703における画素カウント値をAとし、1フレーム遅延映像702における画素カウント値をBとし、2フレーム遅延映像701における画素カウント値をCとしてショートラインノイズ判定ブロック119にて以下の判定条件にしたがって、エラー判定を行う。すなわち、(3)B>A+閾値を満足し、(4)B>C+閾値を満足するときショートラインノイズが発生していると判定する。ここで、この判定は、瞬間的に、短い水平方向のラインが急激に増えた場合を検出するものとなっている。なお、本実施形態においては、3つのフレーム701〜703から同時に短い水平方向のラインに属する画素数をカウントしているが、例えば、入力フレーム映像703についてのみ画素のカウントを行い、そのカウント値を遅延させることでも、同じことを実現することは可能である。以上の判定条件に基づいてショートラインノイズ判定ブロック119が判定したエラーはCPU120を介して通知される。
【符号の説明】
【0050】
100 映像ノイズ検知装置 101 メモリコントローラ(フレーム出力部)
104 判定情報算出部 105 ノイズ判定部
【技術分野】
【0001】
本発明は、映像ノイズ検知装置に関する。
【背景技術】
【0002】
現在の映像編集作業は主にテープ素材を一旦編集機材へ映像データとして転送し、編集を行い、再度テープへ出力するといったワークフローにより行われている。このような編集作業においては、映像データの転送時に、映像データではないノイズが入り込んでしまうことがあり、その確認は人の目視によって行われている。また、放送においては映像データの転送時に、放送機材をいくつも介し、さらに伝送回線も介ししており、この転送過程の途中で同じく映像にノイズが乗ってしまうことがある。このようなノイズとしてはフリーズや、ブラックアウトなどがあり、その検知には一部自動監視装置が導入されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−079752号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、自動監視装置でノイズを検出する方法を用いても、細かいノイズは検知できないため、こちらもほとんどが目視で監視されているのが現状である。
【0005】
本発明はこのような課題に鑑みてなされたものであり、現状目視で行われている映像ノイズの検出を自動で行うことができる映像ノイズ検知装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を解決するために、本発明に係る映像ノイズ検知装置は、入力された映像信号を構成する任意のフレームである入力フレーム映像、当該入力フレーム映像より所定のフレーム数だけ前のフレームである第1のフレーム映像、及び、当該第1のフレーム映像より所定のフレーム数だけ前のフレームである第2のフレーム映像を出力するフレーム出力部と、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像に基づいてノイズ判定情報を算出する判定情報算出部と、この判定情報算出部で算出されたノイズ判定情報に基づいて映像信号に含まれるノイズを判定するノイズ判定部と、を有する。
【0007】
このような映像ノイズ検知装置において、判定情報算出部は、同一座標に設定された部分領域により、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像を走査して、当該部分領域間の部分相関を算出し、ノイズ判定部は、この部分相関に基づいてノイズを判定することが好ましい。
【0008】
このとき、ノイズ判定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像を走査したときに、ノイズを検出した部分領域の数をカウントし、この部分領域の数が所定の閾値以上の場合にノイズとして検出することが好ましい。
【0009】
あるいは、ノイズ判定部は、入力フレーム映像と第2のフレーム映像との間の部分相関は高く、且つ、入力フレーム映像と第1のフレーム映像との間の部分相関が低い場合に、ノイズとして検出することが好ましい。
【0010】
あるいは、ノイズ判定部は、入力フレーム映像と第2のフレーム映像との間の部分相関が高く、且つ、入力フレーム映像と第1のフレーム映像との間の部分相関が低い場合に、予め想定されるノイズパターンと第1のフレーム映像の部分領域との相関を求め、当該相関が高い場合にノイズとして検出することが好ましい。
【0011】
あるいは、ノイズ判定部は、入力フレーム映像と第2のフレーム映像との間の部分相関が低く、且つ、入力フレーム映像と第1のフレーム映像との間の部分相関に予め想定される特徴パターンがある場合にノイズとして検出することが好ましい。
【0012】
あるいは、ノイズ判定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像との間の部分相関に予め想定される特徴パターンがある場合にノイズとして検出することが好ましい。
【0013】
また、このような映像ノイズ検知装置において、判定情報算出部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像の間の全体相関を算出し、ノイズ判定部は、全体相関が所定の閾値より小さい場合に、部分相関によるノイズ判定を行わないことが好ましい。
【0014】
また、このような映像ノイズ検知装置において、判定情報算定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像の同一座標の画素毎に当該画素の輝度値を用いて、(入力フレーム映像+第2のフレーム映像)−(第1のフレーム映像)×2の演算を行い、ノイズ判定部は、この演算結果から予め想定されるノイズパターンを抽出してノイズ判定を行うことが好ましい。
【0015】
また、このような映像ノイズ検知装置において、判定情報算定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像からそれぞれの特徴量を算出し、ノイズ判定部は、この特徴量を比較してノイズ判定を行うことが好ましい。
【0016】
このとき、判定情報算定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像のうちいずれか2つの映像を選択し、それぞれの映像において、水平ライン毎にラインノイズの特徴となる垂直エッジ画素数の総和及び上下の複数の水平ラインとの関係を特徴量として算出することが好ましい。
【0017】
あるいは、判定情報算定部は、入力フレーム映像若しくは第1のフレーム映像においてブロック状のノイズの特徴となる四角領域を検出し、入力フレーム映像若しくは第1のフレーム映像における四角領域の内部及び周辺領域と、当該映像より遅延された映像における四角領域に対応する領域の内部及び周辺領域との相関関係を特徴量として算出することが好ましい。
【0018】
あるいは、判定情報算定部は、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像毎にショートラインノイズの特徴である短く連続する垂直エッジを検出し、入力フレーム映像、第1のフレーム映像及び第2のフレーム映像の間の垂直エッジの総量の変化を特徴量として算出することが好ましい。
【発明の効果】
【0019】
本発明に係る映像ノイズ検知装置を以上のように構成すると、映像ノイズの検出を自動で行うことができる。
【図面の簡単な説明】
【0020】
【図1】映像ノイズ検査装置の一実施例を示すブロック図である。
【図2】部分相関処理を説明するための説明図である。
【図3】ラインノイズの検出方法を説明するための説明図であって、(a)はラインノイズ開始の検出方法を示し、(b)はラインノイズ終了の検出方法を示す。
【図4】ブロックノイズの検出方法を説明するための説明図である。
【図5】白点・黒点ノイズの検出方法を説明するための説明図である。
【図6】ストライプ状フリーズ及びストライブ状ブラックの検出方法を説明するための説明図である。
【図7】ショートラインノイズの検出方法を説明するための説明図である。
【発明を実施するための形態】
【0021】
以下、本発明の好ましい実施形態について図面を参照して説明する。まず、図1を用いて本実施形態に係る映像ノイズ検知装置の構成について説明する。この映像ノイズ検知装置100は、入力映像信号(デジタル信号)から任意のフレーム遅延信号(例えば1フレーム遅延及び2フレーム遅延の信号を作成し、入力映像信号と合わせて3フレーム分の信号)を作成するフレーム出力部としてのメモリコントローラ101と、3フレーム分の信号からノイズを判定するための情報を算出する判定情報算出部104と、算出された情報から入力映像信号にノイズが発生しているか否かを判定するノイズ判定部105と、を有している。なお、判定情報算出部104としては、3フレーム分の信号から相関関係を求めて判定情報を算出する方法や、画像間演算を行って判定情報を算出する方法や、ブロック状のノイズ、ライン状のノイズ、白点・黒点ノイズ、ストライプ状のフリーズ、ストライプ状のブラックアウト、及び、ショートラインノイズの特徴を判定情報として検出する方法が用いられる。なお、映像ノイズとしては、目視において見落としやすい、1フレームから数フレームのみ一瞬発生するノイズが存在するが、本実施形態に係る映像ノイズ検知装置100は、特にこれらについて検出が行える構成としている。
【0022】
入力映像信号はデジタル映像で、SDI(Serial Digital Interface)やアナログ信号をAD変換したもの等で構成される(ビット数は任意で通常は8〜20bit程度)。入力されたデジタル映像信号(入力フレーム映像)は、メモリコントローラ101に取り込まれ、バッファメモリ102へ書き込まれる。このときバッファメモリ102はリングバッファ構成により複数のフレームを残しておくことができる。また、メモリコントローラ101は書込みと同時に読み出しを行うことができ、任意の過去に書き込んだフレームを複数同時に出力することができる。ここではバッファメモリ102とメモリコントローラ101によりにより1フレーム遅延した信号である1フレーム遅延映像(第1のフレーム映像)及び2フレーム遅延した信号である2フレーム遅延映像(第2のフレーム映像)が作られる。なお、ノイズとして、複数フレーム以上離れた画像間での相関により検出できるものがある場合は、任意のフレーム数だけ遅延させたフレーム遅延信号を出力して使用することも可能である。このようにして遅延された1フレーム遅延映像及び2フレーム遅延映像と入力フレーム映像とを合わせた3フレーム分の映像は判定情報算出部104に入力される。
【0023】
ここで、判定情報算出部104は、フレーム間の全体相関又は部分相関を求める相関検出ブロック106と、画像間演算を行う画像間演算ブロック108と、ラインノイズの特徴を検出するラインノイズ特徴検出ブロック110と、ブロック状ノイズの特徴を検出するブロックノイズ特徴検出ブロック112と、白点・黒点ノイズの特徴を検出する白点・黒点ノイズ特徴検出ブロック114と、ストライプ状フリーズ(若しくはストライプ状ブラックアウト)の特徴を検出するストライプフリーズ特徴検出ブロック116と、ショートラインノイズの特徴を検出するショートラインノイズ特徴検出ブロック118と、から構成され、メモリコントローラ101から出力された3フレーム分の映像はそれぞれのブロックに入力されるように構成されている。また、ノイズ判定部105には、上述の判定情報算出部104を構成するブロックに対応して、相関ノイズ判定ブロック107と、画像間演算結果判定ブロック109と、ラインノイズ判定ブロック111と、ブロックノイズ判定ブロック113と、白点・黒点ノイズ判定ブロック115と、ストライプフリーズ判定ブロック117と、ショートラインノイズ判定ブロック119と、が設けられている。
【0024】
なお、どの方法によりノイズの検知を行うかを切り替えるために、検出判定制御ブロック103が設けられており、CPUバス123で接続されたCPU120からの制御信号により、この検出判定制御ブロック103が判定情報算出部104及びノイズ判定部105の作動を制御するように構成されている。また、ノイズ判定部105を構成する各々のブロックから出力される判定結果もCPUバス123を介してCPU120に送信され、LEDや音声出力から構成されるアラーム出力121を介してノイズ検知が報知されたり、ネットワークコントローラ等からなる外部インタフェース122を介してPC等の外部機器へノイズ検知の通知が行われる。もちろん、判定情報算出部104及びノイズ判定部105にすべてのブロックを設ける必要はなく、映像ノイズを検出するための方法を適宜選択して実装することができる。
【0025】
それでは、判定情報算出部104及びノイズ判定部105を構成する各ブロックにおけるノイズ検知の方法について以下に説明する。
【0026】
[相関検出]
相関検出ブロック106は、各フレーム映像の輝度値を用いて、入力フレーム映像と1フレーム遅延映像との間、入力フレーム映像と2フレーム遅延映像との間、及び、1フレーム遅延映像と2フレーム遅延映像との間で全体相関、及び、各フレームの同一の座標での部分相関を計算する。ここで、部分相関の求め方について図2を用いて説明する。なお、以降の説明において、図2に示すように、あるフレームの左上隅から1画素毎に水平方向に処理をして行き、右端に到達すると、一つ下(1画素下のライン)に移動して左端から右端に向かって水平方向に処理をし、この操作をフレームの右下隅まで繰り返し行うことを「水平走査」と呼ぶ。
【0027】
部分相関では図2に示す、2フレーム遅延映像201、1フレーム遅延映像202、及び、入力フレーム映像203のそれぞれにおいて、同じ座標位置に、所定の大きさ(例えば、16×8画素)を有する部分領域204を設定し、それぞれのフレーム間で相関を取る処理を水平走査により行う。すなわち、部分領域204は水平方向へ1画素ずつ移動させて部分相関を求め、また、垂直方向へも1画素ずつ移動させて部分相関を求める。例えば、図2に示すように、1フレーム遅延映像202に瞬間的なノイズが存在する場合には、2フレーム遅延映像201と入力フレーム映像203との間の相関が高いのに対して、2フレーム遅延映像201と1フレーム遅延映像202との間、及び、1フレーム遅延映像202と入力フレーム映像203との間の相関が低くなるため、この瞬間的なノイズを検出することができる。
【0028】
また、テープからの再生ノイズにおいては、相関関係に特徴的なパターンが現れるため、このパターンを検知することでノイズと判定することができる。例えば、入力フレーム映像203と2フレーム遅延映像201との間の部分相関が高く、且つ、入力フレーム映像203と1フレーム遅延映像202の部分相関が低い場合に、予め想定されるノイズパターンと1フレーム遅延映像202の部分領域204との相関を求め、当該相関が高い場合にノイズとして検出することができる。あるいは、入力フレーム映像203と2フレーム遅延映像201との間の部分相関が低く、入力フレーム映像203と1フレーム遅延映像202との間の部分相関に予め想定される特徴パターンが見られる場合にノイズとして検出することができる。さらに、入力フレーム映像203、1フレーム遅延映像202及び2フレーム遅延映像201の間の部分相関に予め想定される特徴パターンが見られる場合にノイズとして検出することもできる。
【0029】
このようにして求められた相関の結果は、相関ノイズ判定ブロック107に渡され、ここで相関関係及び相関のパターンとの比較が行われノイズが検知されたかを判断する。例えば、ノイズが検出された部分領域の数をカウントし、その数が所定の閾値を超えたときにノイズを検出することができる。そして、上述した様に、最終的にはCPU120がこの情報を読み出し、装置のアラーム出力121や、外部インタフェース122を介した通知でPC等の外部機器に対してエラーの検知(映像ノイズの検知)を通知する。ここで、相関ノイズ判定ブロック107は、部分相関の結果からノイズを検出した場合には、どのフレームのどの位置(例えば、フレーム内の画素の座標で表す)でノイズが発生したのかをCPU120に出力するように構成することも可能である。なお、全体相関は、全体の画面として動きがあるかを確認するために使用される。全体に動きが大きい場合、すなわち、映像間の全体相関が所定の閾値より小さい場合には、部分的なノイズの誤検知が発生する為、このときの部分相関より検知されたノイズは最終的にはノイズと判定しない。
【0030】
また、以上の説明では、入力フレーム映像203、1フレーム遅延映像202及び2フレーム遅延映像201の間で部分相関及び全体相関を求めてノイズを検出するように構成した場合について説明したが、これら3つの映像201〜203のうち、いずれか2つを選択して部分相関及び全体相関を求めてノイズを検出するように構成することも可能である。
【0031】
[画像間演算]
画像間演算ブロック108は、メモリコントローラ101から入力された2フレーム遅延映像、1フレーム遅延映像及び入力フレーム映像の同一位置の画素毎に当該画素の輝度値を用いて、(入力フレーム映像+2フレーム遅延映像)−(1フレーム遅延映像)×2の計算を行う。すなわち、上記演算を行うことにより、変化の少ない画素はほぼゼロになり、反対に、1フレーム遅延映像にノイズが乗っている場合にはそのノイズによる輝度値だけが2倍されて出力されるため、ノイズの検出を容易に行うことができるからである。そして、画像間演算結果判定ブロック109は、あらかじめ想定されるノイズパターンを先の演算結果から抽出してノイズを検出し、エラーの検知を通知する。なお、画像間演算ブロック108において、上記画像間演算と同時に入力フレーム映像と2フレーム遅延映像におけるエッジの多い領域を求め、先の計算結果においてノイズを検出する領域から除外することにより、ノイズの検出精度を向上させることができる。これは、エッジの多い領域はノイズと正しい映像との区別がつきにくいためである。なお、部分領域を設定し、それぞれの映像においてこの部分領域を水平走査しながら上記画像間演算を行っても良い。
【0032】
[ラインノイズ特徴検出]
ラインノイズ特徴検出ブロック110は、図3(a)に示すように、入力フレーム映像303と1フレーム遅延映像301を用いてノイズの検出を行う。ここで、ラインノイズは横方向にエッジが並ぶ特徴があるため、ある画素のライン(図3(a)のライン301a,303a)とその画素の一つ下のライン(図3(a)のライン301b,303b)において画素毎に輝度値を比較し、所定の閾値以上の差があるときにそれらの画素の間に垂直エッジがあるとして検出し、その画素数を水平方向に足し込んで、ラインごとのエッジ量(エッジ画素カウント値)とする。このライン毎のエッジ量は、フレーム毎に設けられ、ライン毎に記録することができるエッジ画素カウント値記録メモリ302,304へ記録していく。以上のようにして、入力フレーム映像303と1フレーム遅延映像301の全てのラインに対してライン毎のエッジ量が記録されると、ラインノイズ判定ブロック111は、入力フレーム映像303と1フレーム遅延映像301との間で、ライン毎のエッジ画素カウント値記録メモリ302,304の値を比較し、1フレーム遅延映像301に対して入力フレーム映像303のエッジ量が急激に増えているラインをラインノイズ候補とする。
【0033】
また、もともと斜めの線がその近辺にあり、それがたまたま水平に変化することも考えられる為、ラインノイズ判定ブロック111は、上下数ラインのエッジ量の総和を求めてこれについても入力フレーム映像303と1フレーム遅延映像301の間で比較を行う。斜めの線が移動して水平になった場合には、1フレーム遅延映像301と入力フレーム映像303における上下数ラインのエッジ量の総和の変化が少なくなるからである。そして、上記でラインノイズ候補となったラインについて、上下数ラインのエッジ量の総和の差が閾値以上で明らかにラインが急激に現れたと判断される場合は、ラインノイズ発生開始としてラインごとに記録を行う。
【0034】
ラインノイズ発生開始となっているラインについて、図3(b)に示すように、ラインノイズ特徴検出ブロック110により、次以降の入力フレーム映像307と1フレーム遅延映像305との間でもラインのエッジ量を算出し、ライン毎のエッジ画素カウント値記録メモリ306,308に記憶させ、ラインノイズ判定ブロック111において、このようにして算出されたエッジ量及び、上下数ラインのエッジ量の総和の比較を行う。変化が閾値以下の場合は、継続してラインノイズが発生していると判断する。また1フレーム遅延映像305に比べて入力フレーム映像307のエッジ量が急激に減り、且つエッジ量の総和も急激に減った場合には、ラインノイズ終了候補とする。このとき、ライン毎にラインノイズが発生したフレームから終了したフレームまでのフレーム数をラインノイズ発生継続フレーム数として記憶しておく。
【0035】
ラインノイズ判定ブロック111においてラインノイズ開始判定が間違っていた場合(映像中のラインをノイズと判定してしまっていた場合)にはラインの上下数ライン以内に急激なライン変化(ラインノイズ発生開始のラインが存在)が存在することになる。そのため、ラインノイズ判定ブロック111は、このラインノイズ発生開始のラインが上下数ライン以内に存在する場合には、ラインノイズではなかったと判断する。
【0036】
ラインノイズ判定ブロック111は、以上のようにしてラインノイズ終了候補で上下数ライン以内にラインノイズ発生開始のラインが存在しない場合で、そのラインのラインノイズ発生継続フレーム数が閾値以下の時にラインノイズ発生と判断し、CPU120を介して通知が行われる。
【0037】
[ブロックノイズ特徴検出]
ブロックノイズ特徴検出部ブロック112は、図4に示すように入力フレーム映像402と1フレーム遅延映像401との比較を行い、入力フレーム映像402に四角状の領域404が検出された場合に、ブロック状ノイズの候補とする。そして、ブロックノイズ判定ブロック113は、その候補の領域内部404と四角領域の周辺領域405について比較を行い、下記の条件(1),(2)を満たした場合にノイズと判定する。(1)まず、四角領域404の内部輝度または色が1フレーム遅延映像401の同じ座標の四角領域403に比べて急激に変化していて、且つ四角領域の周辺領域405の輝度または色の変化が小さい場合で、この条件を満たす領域の数が閾値以上の場合。(2)四角領域404の内部輝度または色が急激に変化している場合で画像全体におけるこの条件を満たす領域の数が閾値以上の場合。なお、条件(1)の閾値は小さめに設定して、数が少なくてもノイズとすることが望ましい。また、条件(2)の閾値は大きめに設定して数が多い場合のみノイズとすることが望ましい。上記判定条件によりノイズとして検知されるとCPU120を介して通知が行われる。
【0038】
具体的には以下の手順でノイズの検出が行われる。まず、ブロックノイズ特徴検出ブロック112は、入力フレーム映像402に対して、所定の大きさを有する領域(例えば、8×8画素の領域)を設定し、この領域を水平方向に1画素ずつ移動し、また、垂直方向に1画素ずつ移動させて水平走査を行い、四角領域404のエッジ検出を行う。入力フレーム映像402の左上隅から右下隅にかけて水平走査を行うと、まず、四角領域404の左上隅の角が検出される。すると、ブロックノイズ判定ブロック113は、入力フレーム映像402における四角領域404の左上側の輝度又は色の変化と周辺領域405の輝度又は色の変化、及び、1フレーム遅延画像401の同じ座標の四角領域403の輝度又は色の変化を取得する。そして、水平走査を続け、四角領域403,404及び周辺領域405の輝度又は色を取得するとともに、四角領域の右上、左下、及び右下を検出する。そして、このようにして検出された四角領域404が、上記条件(1),(2)を満足するか否かを判定し、満足する場合は、領域の数のカウントを行う。最後に、検出された四角領域404の数をブロックノイズ判定ブロック113に渡し、この領域の数が上記判定条件を満たしているときは、ノイズとして検知する。このように、入力フレーム映像402に対して水平走査を行い四角領域404のエッジを見つける度に、上記判定処理を行うことにより、検出のために使うメモリのサイズを小さくすることができる。なお、検出された四角領域404が、水平方向で4〜50画素、垂直方向で4〜20画素以内のときに、ブロックノイズとして判断することにより検出精度を向上させることができる。
【0039】
なお、以上の説明では、入力フレーム映像402及び1フレーム遅延映像401の間でブロックノイズを検出するように構成した場合について説明したが、1フレーム遅延映像と2フレーム遅延映像との間でブロックノイズを検出するように構成することも可能である。
【0040】
[白点・黒点特徴検出]
白点・黒点ノイズ特徴検出ブロック114は、図5に示すように入力フレーム映像503と1フレーム遅延映像502に対して検出領域501による水平走査を行うことにより比較を行う。ここで、検出領域501は、5×3画素の領域であって、この検出領域501の中央にある画素Aが白点又は黒点であるかを周囲の画素(a〜lで示している)の輝度値から判定するものである。白点・黒点ノイズ特徴検出ブロック114は、入力フレーム映像503及び1フレーム遅延映像502に対して検出領域501を水平方向に1画素ずつ移動し、また、垂直方向に1画素ずつ移動させて水平走査を行い白点及び黒点の判定を行う。なお、1フレーム遅延映像502では白点・黒点ノイズが検出されないが、入力フレーム映像503で白点・黒点ノイズが検出された場合に、ノイズとする。また、このノイズの検出は、瞬間的なものを検出したい場合は入力フレーム映像503と1フレーム遅延映像502の比較を行うが、継続のものを含めて検出したい場合には、入力フレーム映像503のみで検出を行う。また、厳密に継続していないことを判断する為には、2フレーム遅延映像に対しても水平走査をして、ノイズが発生していないことを条件とする。
【0041】
白点、黒点の判定条件は以下とする。
(1)周囲の値計算
まず、上述の検出領域501を構成するa〜lの画素の輝度値を用いて、これらの画素の輝度値の加重平均、最大値及び最小値を以下の式により求める。
加重平均 (a+b+(c*2)+d+e+(f*2)+(g*2)+h+i+(j*2)+k+l)/16 (領域)
最大値 max(a,b,c,d,e,f,g,h,i,j,k,l)
最小値 min(a,b,c,d,e,f,g,h,i,j,k,l)
(2)白点の判定
そして、判定対象の画素Aの輝度値を、周辺画素の加重平均、最大値及び最小値と比較し、以下の条件を満足するとき、この判定対象の画素Aを白点であると判定する。すなわち、(i)最大値と最小値との差が所定の閾値以下であり、(ii)加重平均と画素Aの輝度値との差が所定の閾値以上で且つ加重平均より画素Aの輝度値が大きく、(iii)最大値と画素Aの輝度値との差が所定の閾値以上で且つ最大値より画素Aの輝度値が大きく、(iv)画素Aの輝度値が所定の閾値以上の場合である。
(3)黒点の判定
同様に、判定対象の画素Aの輝度値を、周辺画素の加重平均、最大値及び最小値と比較し、以下の条件を満足するとき、この判定対象の画素Aを黒点であると判定する。すなわち、(i)最大値と最小値との差が所定の閾値以下であり、(ii)加重平均と画素Aの輝度値との差が所定の閾値以上で且つ加重平均より画素Aの輝度値が小さく、(iii)最小値と画素Aの輝度値との差が所定の閾値以上で且つ最小値より画素Aの輝度値が小さく、(iv)画素Aの輝度値が所定の閾値以下の場合である。
【0042】
白点・黒点ノイズ判定ブロック115は、以上の処理により白点・黒点ノイズ特徴検出ブロック114により検出された白点若しくは黒点ノイズの数をカウントし、検出されたノイズの数が閾値以上の場合にノイズとして検知してCPU120を介して通知を行う。
【0043】
なお、検出領域501の設定は図5のように、中央の画素Aの両側の画素501a,501bを判定に使用しないようにしている。これはHD(High Definition)の画像で1920×1080のサイズの画像が1440×1080の元画像から作成されている場合に水平方向に補間が行われ、白点、黒点がうまく検出できない場合があるためである。
【0044】
[ストライプフリーズ(ストライプブラックアウト)特徴検出]
ストライプフリーズ特徴検出ブロック116においては、図6(a)に示すように、入力フレーム映像602及び1フレーム遅延映像601の比較を行い、同一の位置にあるラインの画素ごとに相関を求め、閾値以上の相関の高い画素の数が水平ラインを構成する画素数に対して閾値以上あるラインをフリーズラインとする。同時にフリーズしている画素に対する垂直方向のエッジを検出して(エッジの検出方向はラインノイズ特徴検出ブロック110と同じ方法を用い、水平方向に並ぶ上下の画素の輝度値を比較して求める)水平ライン方向にこのエッジ数(画素数)をカウントし、そのカウント値が閾値以上あるラインをフリーズ境界ラインとする。
【0045】
ストライプフリーズ判定ブロック117は、フリーズラインが閾値以上でフリーズ境界ラインが閾値以上ある場合にストライプ状フリーズとして検知してCPU120を介して通知を行う。
【0046】
またストライプ状のブラックアウトについても、上記と同じような検出が可能である。図6(b)に示すように、入力フレーム映像又はその他の遅延フレーム映像604において、黒画素が閾値以上あるラインをブラックラインとして、その境界エッジを求めて、閾値以上のものをブラック境界ラインとし、ブラックラインが閾値以上で、ブラック境界ラインが閾値以上のものをストライプ状ブラックアウトとして検知してCPU120を介して通知する。ただし、ストライプ上のブラックアウトは複数のフレームでなくても検知可能である。
【0047】
[ショートラインノイズ特徴検出]
ショートラインノイズ特徴検出ブロック118は、図7に示すように入力フレーム映像703と1フレーム遅延映像702及び2フレーム遅延映像701のそれぞれに対して、対象画素領域704による水平走査を行い、以下の条件(1),(2)の両方を満たす画素数をカウントする。なお、対象画素領域704は、図7に示すよう2×5画素で構成し、各画素にa〜jの符号を付した場合、各画素a〜jの輝度値を用いて以下の条件式により判定する。
【0048】
(カウント画素の判定条件)
(1)(a>f+閾値 && b>g+閾値 && c>h+閾値 && d>i+閾値 && e>j+閾値)
|| (f>a+閾値 && g>b+閾値 && h>c+閾値 && i>d+閾値 && j>e+閾値)
(2)条件(1)を満たす画素が水平方向に所定の長さ以上続く(例えば2画素以上16画素以下続く)
【0049】
次に、入力フレーム映像703における画素カウント値をAとし、1フレーム遅延映像702における画素カウント値をBとし、2フレーム遅延映像701における画素カウント値をCとしてショートラインノイズ判定ブロック119にて以下の判定条件にしたがって、エラー判定を行う。すなわち、(3)B>A+閾値を満足し、(4)B>C+閾値を満足するときショートラインノイズが発生していると判定する。ここで、この判定は、瞬間的に、短い水平方向のラインが急激に増えた場合を検出するものとなっている。なお、本実施形態においては、3つのフレーム701〜703から同時に短い水平方向のラインに属する画素数をカウントしているが、例えば、入力フレーム映像703についてのみ画素のカウントを行い、そのカウント値を遅延させることでも、同じことを実現することは可能である。以上の判定条件に基づいてショートラインノイズ判定ブロック119が判定したエラーはCPU120を介して通知される。
【符号の説明】
【0050】
100 映像ノイズ検知装置 101 メモリコントローラ(フレーム出力部)
104 判定情報算出部 105 ノイズ判定部
【特許請求の範囲】
【請求項1】
入力された映像信号を構成する任意のフレームである入力フレーム映像、当該入力フレーム映像より所定のフレーム数だけ前のフレームである第1のフレーム映像、及び、当該第1のフレーム映像より所定のフレーム数だけ前のフレームである第2のフレーム映像を出力するフレーム出力部と、
前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像に基づいてノイズ判定情報を算出する判定情報算出部と、
前記判定情報算出部で算出された前記ノイズ判定情報に基づいて前記映像信号に含まれるノイズを判定するノイズ判定部と、を有する映像ノイズ検知装置。
【請求項2】
前記判定情報算出部は、同一座標に設定された部分領域により、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像を走査して、当該部分領域間の部分相関を算出し、
前記ノイズ判定部は、前記部分相関に基づいて前記ノイズを判定することを特徴とする請求項1に記載の映像ノイズ検知装置。
【請求項3】
前記ノイズ判定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像を走査したときに、ノイズを検出した前記部分領域の数をカウントし、前記部分領域の数が所定の閾値以上の場合にノイズとして検出することを特徴とする請求項2に記載の映像ノイズ検知装置。
【請求項4】
前記ノイズ判定部は、前記入力フレーム映像と前記第2のフレーム映像との間の前記部分相関は高く、且つ、前記入力フレーム映像と前記第1のフレーム映像との間の前記部分相関が低い場合に、ノイズとして検出することを特徴とする請求項3に記載の映像ノイズ検知装置。
【請求項5】
前記ノイズ判定部は、前記入力フレーム映像と前記第2のフレーム映像との間の前記部分相関が高く、且つ、前記入力フレーム映像と前記第1のフレーム映像との間の前記部分相関が低い場合に、予め想定されるノイズパターンと前記第1のフレーム映像の前記部分領域との相関を求め、当該相関が高い場合にノイズとして検出することを特徴とする請求項3に記載の映像ノイズ検知装置。
【請求項6】
前記ノイズ判定部は、前記入力フレーム映像と前記第2のフレーム映像との間の前記部分相関が低く、且つ、前記入力フレーム映像と前記第1のフレーム映像との間の前記部分相関に予め想定される特徴パターンがある場合にノイズとして検出することを特徴とする請求項3に記載の映像ノイズ検知装置。
【請求項7】
前記ノイズ判定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像との間の前記部分相関に予め想定される特徴パターンがある場合にノイズとして検出することを特徴とする請求項3に記載の映像ノイズ検知装置。
【請求項8】
前記判定情報算出部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像の間の全体相関を算出し、
前記ノイズ判定部は、前記全体相関が所定の閾値より小さい場合に、前記部分相関によるノイズ判定を行わないことを特徴とする請求項2〜7いずれか一項に記載の映像ノイズ検知装置。
【請求項9】
前記判定情報算定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像の同一座標の画素毎に当該画素の輝度値を用いて、(入力フレーム映像+第2のフレーム映像)−(第1のフレーム映像)×2の演算を行い、
前記ノイズ判定部は、前記演算結果から予め想定されるノイズパターンを抽出してノイズ判定を行うことを特徴とする請求項1に記載の映像ノイズ検知装置。
【請求項10】
前記判定情報算定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像からそれぞれの特徴量を算出し、
前記ノイズ判定部は、前記特徴量を比較してノイズ判定を行うことを特徴とする請求項1に記載の映像ノイズ検知装置。
【請求項11】
前記判定情報算定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像のうちいずれか2つの映像を選択し、それぞれの映像において、水平ライン毎にラインノイズの特徴となる垂直エッジ画素数の総和及び上下の複数の前記水平ラインとの関係を前記特徴量として算出することを特徴とする請求項10に記載の映像ノイズ検知装置。
【請求項12】
前記判定情報算定部は、前記入力フレーム映像若しくは前記第1のフレーム映像においてブロック状のノイズの特徴となる四角領域を検出し、前記入力フレーム映像若しくは前記第1のフレーム映像における前記四角領域の内部及び周辺領域と、当該映像より遅延された前記映像における前記四角領域に対応する領域の内部及び周辺領域との相関関係を前記特徴量として算出することを特徴とする請求項10に記載の映像ノイズ検知装置。
【請求項13】
前記判定情報算定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像毎にショートラインノイズの特徴である短く連続する垂直エッジを検出し、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像の間の前記垂直エッジの総量の変化を前記特徴量として算出することを特徴とする請求項10に記載の映像ノイズ検知装置。
【請求項1】
入力された映像信号を構成する任意のフレームである入力フレーム映像、当該入力フレーム映像より所定のフレーム数だけ前のフレームである第1のフレーム映像、及び、当該第1のフレーム映像より所定のフレーム数だけ前のフレームである第2のフレーム映像を出力するフレーム出力部と、
前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像に基づいてノイズ判定情報を算出する判定情報算出部と、
前記判定情報算出部で算出された前記ノイズ判定情報に基づいて前記映像信号に含まれるノイズを判定するノイズ判定部と、を有する映像ノイズ検知装置。
【請求項2】
前記判定情報算出部は、同一座標に設定された部分領域により、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像を走査して、当該部分領域間の部分相関を算出し、
前記ノイズ判定部は、前記部分相関に基づいて前記ノイズを判定することを特徴とする請求項1に記載の映像ノイズ検知装置。
【請求項3】
前記ノイズ判定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像を走査したときに、ノイズを検出した前記部分領域の数をカウントし、前記部分領域の数が所定の閾値以上の場合にノイズとして検出することを特徴とする請求項2に記載の映像ノイズ検知装置。
【請求項4】
前記ノイズ判定部は、前記入力フレーム映像と前記第2のフレーム映像との間の前記部分相関は高く、且つ、前記入力フレーム映像と前記第1のフレーム映像との間の前記部分相関が低い場合に、ノイズとして検出することを特徴とする請求項3に記載の映像ノイズ検知装置。
【請求項5】
前記ノイズ判定部は、前記入力フレーム映像と前記第2のフレーム映像との間の前記部分相関が高く、且つ、前記入力フレーム映像と前記第1のフレーム映像との間の前記部分相関が低い場合に、予め想定されるノイズパターンと前記第1のフレーム映像の前記部分領域との相関を求め、当該相関が高い場合にノイズとして検出することを特徴とする請求項3に記載の映像ノイズ検知装置。
【請求項6】
前記ノイズ判定部は、前記入力フレーム映像と前記第2のフレーム映像との間の前記部分相関が低く、且つ、前記入力フレーム映像と前記第1のフレーム映像との間の前記部分相関に予め想定される特徴パターンがある場合にノイズとして検出することを特徴とする請求項3に記載の映像ノイズ検知装置。
【請求項7】
前記ノイズ判定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像との間の前記部分相関に予め想定される特徴パターンがある場合にノイズとして検出することを特徴とする請求項3に記載の映像ノイズ検知装置。
【請求項8】
前記判定情報算出部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像の間の全体相関を算出し、
前記ノイズ判定部は、前記全体相関が所定の閾値より小さい場合に、前記部分相関によるノイズ判定を行わないことを特徴とする請求項2〜7いずれか一項に記載の映像ノイズ検知装置。
【請求項9】
前記判定情報算定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像の同一座標の画素毎に当該画素の輝度値を用いて、(入力フレーム映像+第2のフレーム映像)−(第1のフレーム映像)×2の演算を行い、
前記ノイズ判定部は、前記演算結果から予め想定されるノイズパターンを抽出してノイズ判定を行うことを特徴とする請求項1に記載の映像ノイズ検知装置。
【請求項10】
前記判定情報算定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像からそれぞれの特徴量を算出し、
前記ノイズ判定部は、前記特徴量を比較してノイズ判定を行うことを特徴とする請求項1に記載の映像ノイズ検知装置。
【請求項11】
前記判定情報算定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像のうちいずれか2つの映像を選択し、それぞれの映像において、水平ライン毎にラインノイズの特徴となる垂直エッジ画素数の総和及び上下の複数の前記水平ラインとの関係を前記特徴量として算出することを特徴とする請求項10に記載の映像ノイズ検知装置。
【請求項12】
前記判定情報算定部は、前記入力フレーム映像若しくは前記第1のフレーム映像においてブロック状のノイズの特徴となる四角領域を検出し、前記入力フレーム映像若しくは前記第1のフレーム映像における前記四角領域の内部及び周辺領域と、当該映像より遅延された前記映像における前記四角領域に対応する領域の内部及び周辺領域との相関関係を前記特徴量として算出することを特徴とする請求項10に記載の映像ノイズ検知装置。
【請求項13】
前記判定情報算定部は、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像毎にショートラインノイズの特徴である短く連続する垂直エッジを検出し、前記入力フレーム映像、前記第1のフレーム映像及び前記第2のフレーム映像の間の前記垂直エッジの総量の変化を前記特徴量として算出することを特徴とする請求項10に記載の映像ノイズ検知装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−228975(P2011−228975A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−97550(P2010−97550)
【出願日】平成22年4月21日(2010.4.21)
【出願人】(592217093)株式会社ニコンシステム (102)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月21日(2010.4.21)
【出願人】(592217093)株式会社ニコンシステム (102)
【Fターム(参考)】
[ Back to top ]