
映像品質の客観画質評価装置および自動監視装置
【課題】圧縮ビットストリームおよびその復号過程で生成される中間コード情報のみから主観画質を推定する映像品質の自動監視装置を提供する。
【解決手段】圧縮ビットストリームから各マクロブロックに対して定義された量子化スケールサイズおよびスライスの符号化タイプと、各マクロブロックの各直交変換ブロック内の直交変換係数と、動き補償予測を適用しているマクロブロック内の各直交変換ブロック内の直交変換係数および参照フレーム番号を取得するマクロブロック層パラメータ解析部1と、前記スライスの符号化タイプ毎に量子化スケールサイズのシーケンス内平均を求める量子化スケール平均値計算部2と、各マクロブロック内の空間的劣化特徴量を求める空間的劣化特徴量計算部3と、時間的劣化特徴量を求める時間的劣化特徴量計算部4と、前記計算部2,3および4で求められた特徴量に基づいて客観画質を導出する特徴量統合部5とからなる。
【解決手段】圧縮ビットストリームから各マクロブロックに対して定義された量子化スケールサイズおよびスライスの符号化タイプと、各マクロブロックの各直交変換ブロック内の直交変換係数と、動き補償予測を適用しているマクロブロック内の各直交変換ブロック内の直交変換係数および参照フレーム番号を取得するマクロブロック層パラメータ解析部1と、前記スライスの符号化タイプ毎に量子化スケールサイズのシーケンス内平均を求める量子化スケール平均値計算部2と、各マクロブロック内の空間的劣化特徴量を求める空間的劣化特徴量計算部3と、時間的劣化特徴量を求める時間的劣化特徴量計算部4と、前記計算部2,3および4で求められた特徴量に基づいて客観画質を導出する特徴量統合部5とからなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は映像品質の客観画質評価装置および自動監視装置に関し、特に動画像の圧縮符号化により劣化した画像の品質を、参照画像および復号画像のベースバンド情報を用いず、圧縮ビットストリーム情報のみで評価する映像品質の客観画質評価装置およびそれを用いた自動監視装置に関するものである。
【背景技術】
【0002】
デジタル映像の蓄積、伝送に際しては、通常圧縮符号化による情報量の削減が行われる。ここで、圧縮符号化とは、一般に非可逆圧縮を意味する。非可逆圧縮とは、符号化情報(エンコードされたビットストリーム)を復号した際に符号化前の原画像を完全に再構築せず、視覚的な劣化を十分に抑える、すなわち画質を十分に高く保つという条件のもとで、情報量を削減する圧縮形式である。非可逆圧縮の典型的な例としては、MPEG-2、 H.264などが挙げられる(下記の非特許文献1,2)。
【0003】
これらの非可逆圧縮においては、前述のとおり視覚的な劣化を十分に抑制した上で符号化が行われるが、圧縮率が高くなる、すなわちビットレートが低下するにつれて、劣化が視覚的に認識されるようになる。また、圧縮率が同じであっても画面内の物体の精細さや動きの大きさ、複雑さなどの映像の特徴によっても視覚的に認識される劣化の程度が異なるなどの性質がある。このため、非可逆圧縮に伴う画質劣化を定量的に測定する技術が求められている。
【0004】
従来の画質の測定は、主観評価と呼ばれる手法で行われていた。これは、20名程度の被験者を集め、被験者に映像を提示し、被験者の主観により評点を付け、その評点を統計的に処理した数値(例:評点の平均)を映像の品質として定義するものである。主観評価法の代表的な手法は、ITU-R勧告BT.500-11、ITU-T勧告P.910などに規定されている(非特許文献3,4)。しかし、主観評価は勧告が規定する厳しい視聴条件を満たすほか、多数の被験者を募集しなければならないなど、決して簡易に映像品質を評価する手段とはいえない。
【0005】
そこで、映像信号の分析により、映像特徴量と呼ばれるその映像の特徴を示す1つまたは複数の数値的指標を抽出し、その映像特徴量から当該映像の品質を導出する客観画質評価が検討されている。客観画質評価により導出される画質は主観画質を推定したものであり、主観画質評価の代替として用いることを目指している。
【0006】
ITU-T J.143(非特許文献5)では客観画質評価法のフレームワークを規定している。客観評価法のフレームワークは、評価のために伝送、蓄積のどの段階の映像を使用するかによって、以下の3つに分類される。
【0007】
(1)Full Reference(FR)型: 圧縮符号化前の原画像および復号画像(蓄積の場合)、又は送信画像および受信画像(伝送の場合)のベースバンド情報を使用する方法。
【0008】
(2)No Reference(NR)型: 復号画像又は受信画像のベースバンド情報のみを使用する方法(原画又は送信画像の情報は使用しない)。
【0009】
(3)Reduced Reference(RR)型: 情報量が制限された原画像又は送信画像の画像特徴量、および復号画像又は受信画像のベースバンド情報を利用する方法。
【0010】
Full Reference型は、蓄積又は伝送の前後のベースバンド画像を利用することができるため、主観画質の推定精度は3つのフレームワークの中ではもっとも高い。一方、No Reference型は蓄積又は伝送後のベースバンド画像のみを使用するため、精度の面ではFull Referenceには劣る。Reduced Reference型はNo Reference型で利用する復号画像又は受信画像のベースバンド情報に加えて、原画像又は送信画像の画像特徴量を利用する。ここで、画像特徴量は、数十〜数百kbps程度で、原画像のベースバンド情報に比べて十分に少ない情報量に制限されたものである。RR型では、主観画質の推定精度をNR型よりも高めるという目的で、映像伝送の際この送信側の画像特徴量を映像回線とは別に用意されたデータ回線を用いて受信側に送信している。
【0011】
上記3種のフレームワークのうち、FR型に基づく客観評価方式としては、ITU-T勧告J.144(非特許文献6)、ITU-T勧告J.267(非特許文献7)および特開2008-35357号公報(特許文献1)などが存在する。非特許文献6は、標準テレビ方式(SDTV)の符号化劣化を対象とした客観画質評価方式を、非特許文献7、特許文献11 はマルチメディアアプリケーションでよく用いられる映像フォーマットを対象とした客観画質評価方式を示している。
【0012】
RR型に基づく客観評価方式としては、ITU-T勧告J.246(非特許文献8)が知られている。非特許文献8は、マルチメディアアプリケーションの映像フォーマットを前提とした客観評価方式について開示している。
【先行技術文献】
【非特許文献】
【0013】
【非特許文献1】ITU-T Recommendation H.262, "Information technology - Generic coding of moving pictures and associated audio information: Video "
【非特許文献2】ITU-T Recommendation H.264, "Advanced video coding for generic audiovisual services"
【非特許文献3】Recommendation ITU-R BT.500-11, "Methodology for the subjective assessment of the quality of television pictures"
【非特許文献4】ITU-T Recommendation P.910, "Subjective video quality assessment methods for multimedia applications"
【非特許文献5】ITU-T Recommendation J.143, "User requirements for objective perceptual video quality measurements in digital cable television"
【非特許文献6】ITU-T Recommendation J.144, "Objective perceptual video quality measurement techniques for digital cable television in the presence of a full reference "
【非特許文献7】ITU-T Recommendation J.247, "Objective perceptual multimedia video quality measurement in the presence of a full reference"
【非特許文献8】ITU-T Recommendation J.246, "Perceptual audiovisual quality measurement techniques for multimedia services over digital cable television networks in the presence of a reduced bandwidth reference"
【特許文献】
【0014】
【特許文献1】特開2008-35357号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
一方、NR型による客観評価方式については、本出願人による先願の特願2008−294359号がある。この先願発明のNR型画質評価は原画像の情報を利用しないため、主幹画質の推定精度の面ではFR型に劣るが、復号画像/受信画像のみでの評価が可能なため、システム構成が簡単である等の利点がある。このため、伝送映像監視の用途としては有効な方式である。
【0016】
前記先願発明では、復号画像のベースバンド信号の解析により時間・空間特徴量を抽出し、それらを統合することで客観画質を推定している。ベースバンド信号は、画素単位での情報が取得できるため、精細な分析が可能であるが、一方で膨大な情報量を持つ非圧縮信号の読み出し、メモリへの蓄積およびそれらの計算処理には、膨大なリソースを要する。このため、解析対象となる情報量を削減し、結果的に計算および情報蓄積のためのリソースを削減する必要があるという課題がある。
【0017】
本発明の目的は、前記課題を解決するために、復号画像のベースバンド信号ではなく、圧縮ビットストリームおよびその復号過程で生成される中間コード情報のみから主観画質を推定する映像品質の客観画質評価装置を提供することにある。他の目的は、主観画質を高精度で推定することができるNR型の映像品質の客観画質評価装置およびそれを用いた自動監視装置を提供することにある。
【課題を解決するための手段】
【0018】
前記の目的を達成するために、本発明は、参照画像を用いずに映像の主観画質を推定する客観画質評価装置において、圧縮ビットストリームから各マクロブロックに対して定義された量子化スケールサイズおよび該各マクロブロックが属するスライスの符号化タイプを少なくとも取得するマクロブロック層パラメータ解析部と、前記スライスの符号化タイプ毎に量子化スケールサイズのシーケンス内平均を求める量子化スケール平均値計算部と、前記量子化スケール平均値計算部で求められた量子化スケールサイズのシーケンス内平均を特徴量として客観画質を導出する客観画質導出部とを具備し、前記圧縮ビットストリームのみを用いて主観画質を推定するようにした点に第1の特徴がある。
【0019】
また、前記マクロブロック層パラメータ解析部は前記圧縮ビットストリームから各マクロブロックの各直交変換ブロック内の直交変換係数を取得し、該マクロブロック層パラメータ解析部で取得された前記各直交変換ブロック内の直交変換係数のうちの直流成分の平均値から前記各マクロブロック内の空間的劣化特徴量を求める空間的劣化特徴量計算部をさらに具備した点に第2の特徴がある。
【0020】
さらに、前記マクロブロック層パラメータ解析部は前記圧縮ビットストリームの各マクロブロックのうち動き補償予測を適用しているマクロブロックについて、該動き補償予測を適用しているマクロブロック内の各直交変換ブロック内の直交変換係数および参照フレーム番号を取得し、前記マクロブロック層パラメータ解析部で取得された前記参照フレーム番号により求められるフレーム間距離によって平均化された予測誤差信号電力を基に時間的劣化特徴量を求める時間的劣化特徴量計算部をさらに具備した点に第3の特徴がある。
【発明の効果】
【0021】
本発明の前記第1〜3の特徴によれば、符号化前の原画像のみならず、復号後のベースバンド信号をも用いることなく、圧縮ビットストリーム内のパラメータ抽出のみにより、符号化映像の主観画質が推定可能な客観画像評価装置を実現できるようになる。すなわち、ベースバンド画像を処理するのに比べて大幅な処理の軽量化を実現できる客観画像評価装置を提供できるようになる。
【0022】
また、受信側情報のみを利用する簡易な映像品質の客観画像評価装置および自動監視装置を提供できるようになる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態の概略の構成を示すブロック図である。
【図2】8×8変換ブロックにおけるマクロブロック(MB)の空間的劣化特徴量の説明図である。
【図3】4×4変換ブロックにおけるマクロブロック(MB)の空間的劣化特徴量の説明図である。
【図4】4×4変換ブロックにおけるマクロブロック(MB)の空間的劣化特徴量の説明図である。
【図5】時間的劣化特徴量計算部の処理の一例を示すフローチャートである。
【図6】図5のステップS5の詳細を示すフローチャートである。
【図7】図6のステップS12の処理の説明図である。
【図8】図6の処理の説明図である。
【図9】回帰分析の説明図である。
【発明を実施するための形態】
【0024】
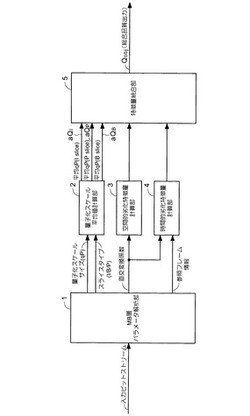
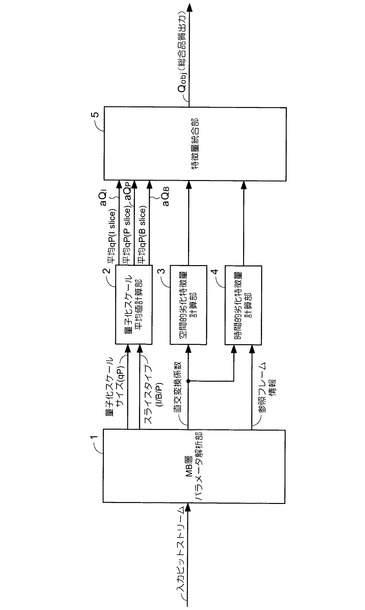
以下に、図面を参照して、本発明を詳細に説明する。図1は、本発明の一実施形態の構成を示すブロック図である。この実施形態は、圧縮符号化されたビットストリーム情報を入力とし、客観評価尺度(すなわち、総合品質)を出力とする映像品質の客観画質評価装置である。
【0025】
該客観画質評価装置は、図1に示されているように、MB(マクロブロック)層パラメータ解析部1,量子化スケール平均値計算部2,空間的劣化特徴量計算部3,時間的劣化特徴量計算部4および特徴量統合部5から構成される。これらの処理部の詳細について、以下に説明する。
【0026】
(A)MB層パラメータ解析部1
【0027】
MB層パラメータ解析部1には、圧縮符号化されたビットストリーム情報(以下、「入力ビットストリーム」と呼ぶ)が入力する。MB層パラメータ解析部1は入力ビットストリームおよびその復号過程で生成される中間コード情報である符号化パラメータ情報、つまり後段の量子化スケール平均値計算部2,空間的劣化特徴量計算部3および時間的劣化特徴量計算部4で必要となる符号化パラメータ情報を、入力ビットストリームから抽出する。入力ビットストリームから取得される符号化パラメータ情報は、次のようなものである。
【0028】
(1)量子化スケールサイズ情報(qp):これは当該MBのqp値(量子化の分母)である。
【0029】
(2)スライスタイプ情報:この情報は,I,P,Bスライスのいずれかであり、SI,SPスライスは、それぞれI,Pスライスと解釈する。
【0030】
(3)変換係数:これは、MB内の各直交変換ブロック内の直交変換係数である。
【0031】
(4)参照フレーム情報:これは、当該MBが動きベクトルを持っている場合に限り、その参照フレーム情報を出力する。当該MBが双予測を適用している場合には、2つの参照フレームを、その参照番号が小さい順に出力するものとする。
【0032】
符号化パラメータは、ビットストリームから直接抽出できる場合と、復号時の中間情報として取得できる場合とに分類されるが、本発明では、圧縮ビットストリームの種類を限定しないため、情報の抽出方法は符号化方式に従うものとし、その詳細な手法についての説明は省略する。
【0033】
(B)量子化スケール平均値計算部2
【0034】
MB層パラメータ解析部1から各MBの量子化スケールサイズ情報(qp)およびスライスタイプ情報(I/B/P)を取得し、各スライスタイプ(I,P,B)における量子化スケールサイズのシーケンス内平均aQI,aQP,aQB、例えば評価対象の画像の始めから終わりまでのフレームにおける各スライスタイプにおける量子化スケールサイズの平均を求める。該量子化スケールサイズのシーケンス内平均値は、原画像−復号画像間の差分電力(PSNR)と高い相関を有することが知られている。本発明では、原画像を用いることができないため、原理的にPSNRを計算することは不可能であるが、このように量子化スケールサイズを活用することにより、シーケンス全体での劣化程度を把握することが可能になる。
【0035】
(C)空間的劣化特徴量計算部3
【0036】
空間的劣化特徴量計算部3は、前記非特許文献3におけるブロック歪特徴量計算部に相当する機能を提供することを目的に構成されている。すなわち、該空間的劣化特徴量計算部3は、復号画像上のブロック歪の視覚的な認識程度を示す指標を出力することを目的とするものである。ブロック歪は、MPEG−2やH.264などのブロック単位の処理を行う符号化画像における共通の劣化要素であり、その劣化度は主観画質と高い相関を持つと考えられる。ブロック歪は、画素ブロックの境界で信号値が大きく変化することにより発生する。換言すると、ブロック間の直流成分が大きく変化している場合に視覚的に目立つようになるといえる。
【0037】
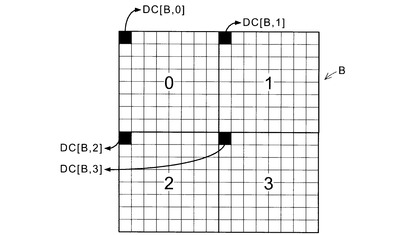
そこで、本実施形態では、空間的劣化特徴量を隣接する8×8画素ブロック間の直流成分の差分二乗平均値により定義する。
【0038】
MB内の直交変換ブロックのサイズが8×8の場合、MB(B)内には、図2に示すように、4つの直交変換ブロック(0〜3)が存在する。いま、該直交変換ブロック(0〜3)の直流成分を、DC[B,S](S=0,1,2,3)と表記するとき、MBにおける空間的劣化特徴量SI(B)は、下記の数1で定義される。
【0039】
【数1】

【0040】
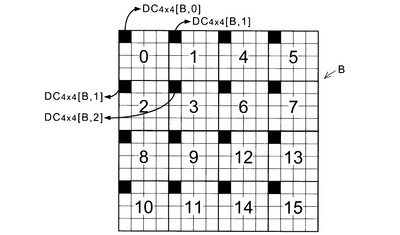
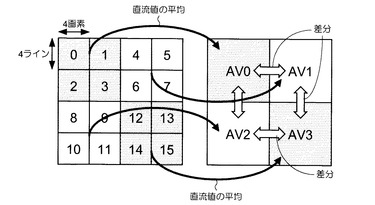
一方、MB内の直交変換ブロックのサイズが4×4の場合、MB(B)内には、図3に示すように、16個の直交変換ブロックが存在することになる。この場合には、4×4変換ブロック境界間で直流成分を調べるのではなく、MBが図4のブロック番号{0,1,2,3}、{4,5,6,7}、{8,9,10,11}および{12,13,14,15}の各集合からなる4つの8×8画素ブロックで構成されているとみなし、この8×8画素ブロック間での直流成分の差を求めるようにする。
【0041】
具体的には、(1)図4の左図において、ブロック番号{0,1,2,3}の4個の4×4変換ブロックの直流値の平均AV0を求める。同様に、ブロック番号{4,5,6,7}、{8,9,10,11}および{12,13,14,15}の各々の4個の4×4変換ブロックの直流値の平均AV1、AV2およびAV3を求める。(2)図4の右図に示されているように、前記AV0〜AV3のそれぞれを8×8画素ブロックの直流値とみなして、8×8画素ブロック間の差分を計算する。
【0042】
サイズが4×4の場合の8×8画素ブロックの直流成分DC[B,k](k=0,1,2,3)は、4×4直交変換ブロックにおける直流値DC4×4[B,S](S=0〜15)を用いて下記の数2のように表される。
【0043】
【数2】
【0044】
前記直流成分DC[B,k]が求まると、後は、8×8変換ブロックの場合と同様に数1を用いて空間的劣化特徴量SI(B)を算出する。
【0045】
最終的に、空間的劣化特徴量SIは、全てのMBにおける空間的劣化特徴量の平均値、すなわち下記の数3で定義される。
【0046】
【数3】
【0047】
ここで、NBはシーケンス内のMBの総数である。
【0048】
(D)時間的劣化特徴量計算部4
【0049】
時間的劣化特徴量計算部4は、前記非特許文献3におけるフリッカ特徴量計算部に相当する機能を提供することを目的に構成されている。すなわち、該時間的劣化特徴量計算部4は、復号画像上のフリッカ妨害の視覚的な認識程度を示す指標を出力することを目的とするものである。ここに、フリッカ妨害は、動き補償予測符号化のイントラフレーム挿入の周期ごとに大きな品質変動がある場合などに検知される劣化であり、連続するフレーム間での輝度変化が急激に発生することにより知覚される。ブロック歪と同様に主観画質との相関が高い映像特徴の一つである。
【0050】
該時間的劣化特徴量計算部4では、MB内の時間的な輝度値の変化を捉えるため、各画素ブロックにおける輝度のフレーム間差分を時間的劣化特徴量として定義する。また、該時間的劣化特徴量を計算するための入力として、各MBの直交変換係数と、動き補償予測における参照フレーム情報を利用する。なお、参照フレームが利用できないMBは本特徴量の計算対象外とする。
【0051】
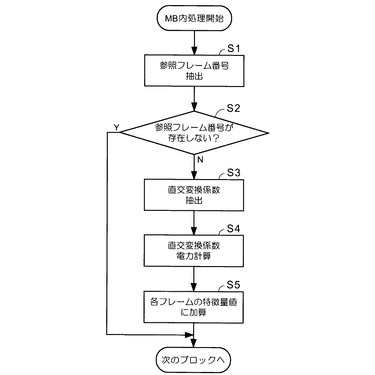
以下に、図5のフローチャートを参照して、該時間的劣化特徴量計算部4の処理を説明する。この処理は、MB単位で処理することを前提としているが、これに限定されるものではない。
【0052】
まず、ステップS1では、処理対象のMBにおける参照フレーム番号を抽出する。参照フレーム番号とは、P,Bスライスの画像が参照するフレーム番号のことである。ここで、参照フレームが存在しない場合には当該ブロックを計算対象外とみなし、ステップS2の判断が肯定となって次のブロックの処理に進む。一方、参照フレームが存在する場合にはステップS3、S4に進んで、それぞれ、当該MBの直交変換係数を抽出し、動き補償予測誤差信号の電力を計算する。なお、該動き補償予測誤差信号の電力は、直交変換係数の二乗平均により求めることができる。
【0053】
MB内が8×8直交変換ブロックにより構成されている場合には、当該MB(B)の動き補償予測誤差信号電力P(B)は、下記の数4で表される。
【0054】
【数4】
【0055】
ここで、XB(i、j)は、ブロック(B)における直交変換係数、SmaxはMB内の直交変換ブロック数(8×8直交変換ブロックにより構成されていればSmax=4、また4×4直交変換ブロックで構成されていればSmax=16)、Nsizeは直交変換ブロックのサイズである(8×8直交変換ブロックにより構成されていればSsize=8、また4×4直交変換ブロックで構成されていればSsize=4)。
【0056】
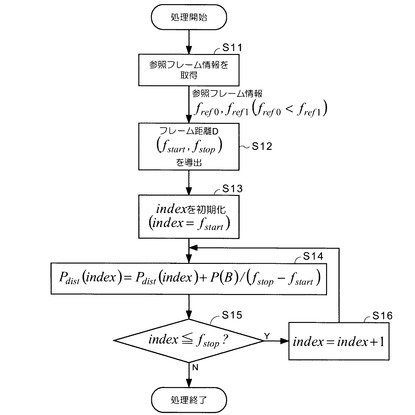
ステップS5では、求められた前記MB(B)の動き補償予測誤差信号電力P(B)が各フレームの特徴量値(既に求められている動き補償予測誤差信号電力P(B))に加算される。該ステップS5の処理の詳細を、図6、図7、図8を参照して、以下に説明する。
【0057】
前記動き補償予測誤差信号電力は、ベースバンド信号から得られるフレーム2枚の予測フレーム間で発生したフレーム間差分電力の総和であるとみなすことができる。よって、該電力を参照フレーム間のフレームに対して均等に配分し、さらにこの操作をフレーム内の全ての動き補償予測の適用されているブロックに適用することにより、各フレームにおけるフレーム間差分電力を求めることができる。
【0058】
まず、図6のステップS11で、参照フレーム情報を取得する。ここに、参照フレームは最大2枚とし、これらをそれぞれfref0,fref1(ただし、fref0<fref1)とする。また、後の処理のために、現フレームをfcurと定義しておく。
【0059】
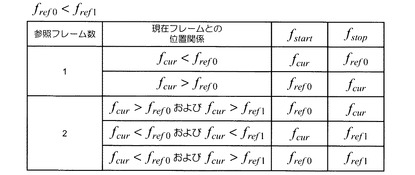
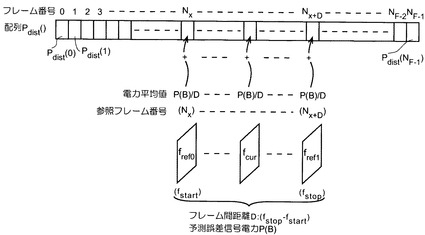
次に、ステップS12に進んで、参照フレームfref0,fref1と現フレームfcurに基づいてフレーム間距離Dを求める。具体的には、図7に示すように、参照フレーム数および参照フレームfref0,fref1と現フレームfcurの大小関係からfstart、fstopを定義するとき、フレーム間距離Dは、(fstop−fstart)により与えられる。
【0060】
すなわち、フレーム間距離は、マクロブロックに対して双予測が適用されている場合で、該双予測における参照フレームがマクロブロックの属する復号画像フレームに対して互いに逆方向に位置している場合には、2つの参照フレーム間の距離により与えられ、一方2つの参照フレームが該マクロブロックの属する復号画像フレームに対してそれぞれ同方向に位置している場合には、該2つの参照フレームのうちのマクロブロックの属する復号画像フレームとの距離が大きい側の参照フレームと前記復号画像フレームとの間の距離により与えられる。また、前記フレーム間距離は、マクロブロックに対して1つしか参照フレームが存在しない場合には、該参照フレームと該マクロブロックの属する復号画像フレームとの間の距離により与えられることになる。
【0061】
次に、ステップS13ではindexを初期化する(index=fstartと置く)。ステップS14では、前記[数4]で求めた直交変換係数の二乗平均によるMB内電力P(B)を前記フレーム間距離D、つまり(fstop−fstart)により割り算して平均し、その値を各フレームの電力値を積算する配列Pdist()に配分する。該配列Pdist()の括弧内には、フレーム番号のインデクスが記述される。なお、該配列Pdist()は、シーケンス先頭フレームの処理に先立って、全フレームの直交変換係数電力が0値に初期化されていることを前提とする。ステップS15では、index≦fstopが成立するか否かの判断がなされ、成立する場合にはステップS14に進んで、index値がインクリメントされる。前記ステップS14,S15およびS16の処理は、ステップS15の判断が否定になるまで続けられる。この処理により、Pdist(index)の要素に電力平均値P(B)/(fstop−fstart)が加算される。以上により、前記ステップS5が実現される。
【0062】
前記の処理を、図8で説明すると、フレーム番号0〜NFー1の配列Pdist()があったとすると、該配列Pdist()の全要素はシーケンス先頭フレームの処理に先立って0に初期化される。次に、現フレームfcurの参照フレームがfref0(fstart),fref1(fstop)とするとフレーム間距離Dは(fstop−fstart)となる。また、fref0の参照フレーム番号をNX、fref1の参照フレーム番号をNX+Dとし、予測誤差信号電力がP(B)であったとすると、前記ステップS14では、P(B)/Dにより電力平均値を算出し、該電力平均値を参照フレーム番号NX〜NX+Dの各配列Pdist(NX)〜Pdist(NX+D)に加算される。
【0063】
最終的に、時間的劣化特徴量は、前記配列Pdist()の全要素の平均により求められる。配列Pdist()の全要素数をNFとするとき、該時間的劣化特徴量TIは、下記の数5の式で表される。
【0064】
【数5】
【0065】
(E)特徴量統合部(又は客観画質導出部)5
【0066】
特徴量統合部5は、スライスタイプ別の量子化スケールの平均値{平均qp(Iスライス)、平均qp(Pスライス)、平均qp(Bスライス)}、空間的劣化特徴量、時間的劣化特徴量の各特徴量を統合し、客観画質を導出または客観評価尺度を求める。スライスタイプI,B,Pにおける量子化スケールの平均値をそれぞれaQI,aQP,aQB、空間的劣化特徴量をSI、時間的劣化特徴量をTIとすると、客観評価尺度Qobjは下記の数6式で求められる。
【0067】
【数6】
【0068】
ここで、f()は所与の関数を表す。最適な近似式は、評価対象の画像フォーマット、符号化方式、符号化ビットレートなどの条件によって異なるため、これらの条件のもとで主観評価値との相関が最大となる関数が選ばれる。
【0069】
前記関数f()の一例としては、wi(i=0〜4)を重み係数として、下記の数7のように、重み付き和で表す式を選ぶことができる。
【0070】
【数7】
【0071】
また、前記関数f()の他の例としては、wi(i=0〜4)、γj(j=1,2)を重み係数とする時、下記の数8で表される近似式を選ぶことができる。
【0072】
【数8】
【0073】
上式におけるwi(i=0〜4)、γj(j=1,2)は、客観評価値Qobjと主観評価値の相関が最大になるように設定される。すなわち、客観画質導出のための近似関数として、各特徴量をべき指数γ1でべき乗した数の重み付き和を、さらに前記べき指数とは異なるべき指数γ2でべき乗した数を用いて行うことができる。
【0074】
客観評価値と主観評価値の相関は、複数の評価映像を用いて得た客観評価値の系列と主観評価値の系列を回帰分析することにより得ることができる。
【0075】
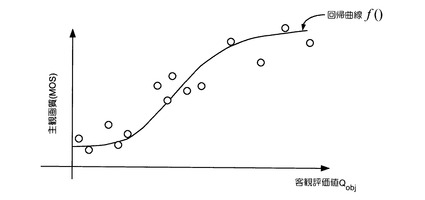
回帰分析の一例を、図9を参照して説明する。図9のように、客観評価値を横軸に、主観評価値を縦軸にして、各データ系列をプロットした場合、両者はある回帰曲線で近似することが可能になる。回帰曲線としては、一次関数のほか、高次多項式やロジスティック関数などの非線形関数を適用することができる。客観画質評価の目的は主観評価値の推定であり、回帰曲線による近似の精度が高い、すなわちグラフ上の各プロット点と回帰曲線の距離が短い程、その性能が高いということができる。
【0076】
前記の実施形態では、量子化スケール平均値計算部2,空間的劣化特徴量計算部3および時間的劣化特徴量計算部4を用いたが、本発明はこれに限定されず、これらのうちの一つ又は複数個を用いるようにしてもよい。例えば、量子化スケール平均値計算部2のみを用いても良好な客観評価をすることができる。または、該量子化スケール平均値計算部2と空間的劣化特徴量計算部3または時間的劣化特徴量計算部4とを用いても良好な客観評価をすることができる。
【0077】
前記のようにして、特徴量統合部5から客観評価尺度Qobjが得られると、該客観評価尺度Qobjを自動的に監視し評価することにより、映像品質の自動監視を行うことができる。例えば、客観評価尺度Qobjを自動的に記録して残したり、所与の映像品質より悪くなった場合にはアラームを出力したりするなどの処理をすることができる。
【符号の説明】
【0078】
1・・・MB(マクロブロック)層パラメータ解析部、2・・・量子化スケール平均値計算部、3・・・空間的劣化特徴量計算部、4・・・時間的劣化特徴量計算部、5・・・特徴量統合部。
【技術分野】
【0001】
本発明は映像品質の客観画質評価装置および自動監視装置に関し、特に動画像の圧縮符号化により劣化した画像の品質を、参照画像および復号画像のベースバンド情報を用いず、圧縮ビットストリーム情報のみで評価する映像品質の客観画質評価装置およびそれを用いた自動監視装置に関するものである。
【背景技術】
【0002】
デジタル映像の蓄積、伝送に際しては、通常圧縮符号化による情報量の削減が行われる。ここで、圧縮符号化とは、一般に非可逆圧縮を意味する。非可逆圧縮とは、符号化情報(エンコードされたビットストリーム)を復号した際に符号化前の原画像を完全に再構築せず、視覚的な劣化を十分に抑える、すなわち画質を十分に高く保つという条件のもとで、情報量を削減する圧縮形式である。非可逆圧縮の典型的な例としては、MPEG-2、 H.264などが挙げられる(下記の非特許文献1,2)。
【0003】
これらの非可逆圧縮においては、前述のとおり視覚的な劣化を十分に抑制した上で符号化が行われるが、圧縮率が高くなる、すなわちビットレートが低下するにつれて、劣化が視覚的に認識されるようになる。また、圧縮率が同じであっても画面内の物体の精細さや動きの大きさ、複雑さなどの映像の特徴によっても視覚的に認識される劣化の程度が異なるなどの性質がある。このため、非可逆圧縮に伴う画質劣化を定量的に測定する技術が求められている。
【0004】
従来の画質の測定は、主観評価と呼ばれる手法で行われていた。これは、20名程度の被験者を集め、被験者に映像を提示し、被験者の主観により評点を付け、その評点を統計的に処理した数値(例:評点の平均)を映像の品質として定義するものである。主観評価法の代表的な手法は、ITU-R勧告BT.500-11、ITU-T勧告P.910などに規定されている(非特許文献3,4)。しかし、主観評価は勧告が規定する厳しい視聴条件を満たすほか、多数の被験者を募集しなければならないなど、決して簡易に映像品質を評価する手段とはいえない。
【0005】
そこで、映像信号の分析により、映像特徴量と呼ばれるその映像の特徴を示す1つまたは複数の数値的指標を抽出し、その映像特徴量から当該映像の品質を導出する客観画質評価が検討されている。客観画質評価により導出される画質は主観画質を推定したものであり、主観画質評価の代替として用いることを目指している。
【0006】
ITU-T J.143(非特許文献5)では客観画質評価法のフレームワークを規定している。客観評価法のフレームワークは、評価のために伝送、蓄積のどの段階の映像を使用するかによって、以下の3つに分類される。
【0007】
(1)Full Reference(FR)型: 圧縮符号化前の原画像および復号画像(蓄積の場合)、又は送信画像および受信画像(伝送の場合)のベースバンド情報を使用する方法。
【0008】
(2)No Reference(NR)型: 復号画像又は受信画像のベースバンド情報のみを使用する方法(原画又は送信画像の情報は使用しない)。
【0009】
(3)Reduced Reference(RR)型: 情報量が制限された原画像又は送信画像の画像特徴量、および復号画像又は受信画像のベースバンド情報を利用する方法。
【0010】
Full Reference型は、蓄積又は伝送の前後のベースバンド画像を利用することができるため、主観画質の推定精度は3つのフレームワークの中ではもっとも高い。一方、No Reference型は蓄積又は伝送後のベースバンド画像のみを使用するため、精度の面ではFull Referenceには劣る。Reduced Reference型はNo Reference型で利用する復号画像又は受信画像のベースバンド情報に加えて、原画像又は送信画像の画像特徴量を利用する。ここで、画像特徴量は、数十〜数百kbps程度で、原画像のベースバンド情報に比べて十分に少ない情報量に制限されたものである。RR型では、主観画質の推定精度をNR型よりも高めるという目的で、映像伝送の際この送信側の画像特徴量を映像回線とは別に用意されたデータ回線を用いて受信側に送信している。
【0011】
上記3種のフレームワークのうち、FR型に基づく客観評価方式としては、ITU-T勧告J.144(非特許文献6)、ITU-T勧告J.267(非特許文献7)および特開2008-35357号公報(特許文献1)などが存在する。非特許文献6は、標準テレビ方式(SDTV)の符号化劣化を対象とした客観画質評価方式を、非特許文献7、特許文献11 はマルチメディアアプリケーションでよく用いられる映像フォーマットを対象とした客観画質評価方式を示している。
【0012】
RR型に基づく客観評価方式としては、ITU-T勧告J.246(非特許文献8)が知られている。非特許文献8は、マルチメディアアプリケーションの映像フォーマットを前提とした客観評価方式について開示している。
【先行技術文献】
【非特許文献】
【0013】
【非特許文献1】ITU-T Recommendation H.262, "Information technology - Generic coding of moving pictures and associated audio information: Video "
【非特許文献2】ITU-T Recommendation H.264, "Advanced video coding for generic audiovisual services"
【非特許文献3】Recommendation ITU-R BT.500-11, "Methodology for the subjective assessment of the quality of television pictures"
【非特許文献4】ITU-T Recommendation P.910, "Subjective video quality assessment methods for multimedia applications"
【非特許文献5】ITU-T Recommendation J.143, "User requirements for objective perceptual video quality measurements in digital cable television"
【非特許文献6】ITU-T Recommendation J.144, "Objective perceptual video quality measurement techniques for digital cable television in the presence of a full reference "
【非特許文献7】ITU-T Recommendation J.247, "Objective perceptual multimedia video quality measurement in the presence of a full reference"
【非特許文献8】ITU-T Recommendation J.246, "Perceptual audiovisual quality measurement techniques for multimedia services over digital cable television networks in the presence of a reduced bandwidth reference"
【特許文献】
【0014】
【特許文献1】特開2008-35357号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
一方、NR型による客観評価方式については、本出願人による先願の特願2008−294359号がある。この先願発明のNR型画質評価は原画像の情報を利用しないため、主幹画質の推定精度の面ではFR型に劣るが、復号画像/受信画像のみでの評価が可能なため、システム構成が簡単である等の利点がある。このため、伝送映像監視の用途としては有効な方式である。
【0016】
前記先願発明では、復号画像のベースバンド信号の解析により時間・空間特徴量を抽出し、それらを統合することで客観画質を推定している。ベースバンド信号は、画素単位での情報が取得できるため、精細な分析が可能であるが、一方で膨大な情報量を持つ非圧縮信号の読み出し、メモリへの蓄積およびそれらの計算処理には、膨大なリソースを要する。このため、解析対象となる情報量を削減し、結果的に計算および情報蓄積のためのリソースを削減する必要があるという課題がある。
【0017】
本発明の目的は、前記課題を解決するために、復号画像のベースバンド信号ではなく、圧縮ビットストリームおよびその復号過程で生成される中間コード情報のみから主観画質を推定する映像品質の客観画質評価装置を提供することにある。他の目的は、主観画質を高精度で推定することができるNR型の映像品質の客観画質評価装置およびそれを用いた自動監視装置を提供することにある。
【課題を解決するための手段】
【0018】
前記の目的を達成するために、本発明は、参照画像を用いずに映像の主観画質を推定する客観画質評価装置において、圧縮ビットストリームから各マクロブロックに対して定義された量子化スケールサイズおよび該各マクロブロックが属するスライスの符号化タイプを少なくとも取得するマクロブロック層パラメータ解析部と、前記スライスの符号化タイプ毎に量子化スケールサイズのシーケンス内平均を求める量子化スケール平均値計算部と、前記量子化スケール平均値計算部で求められた量子化スケールサイズのシーケンス内平均を特徴量として客観画質を導出する客観画質導出部とを具備し、前記圧縮ビットストリームのみを用いて主観画質を推定するようにした点に第1の特徴がある。
【0019】
また、前記マクロブロック層パラメータ解析部は前記圧縮ビットストリームから各マクロブロックの各直交変換ブロック内の直交変換係数を取得し、該マクロブロック層パラメータ解析部で取得された前記各直交変換ブロック内の直交変換係数のうちの直流成分の平均値から前記各マクロブロック内の空間的劣化特徴量を求める空間的劣化特徴量計算部をさらに具備した点に第2の特徴がある。
【0020】
さらに、前記マクロブロック層パラメータ解析部は前記圧縮ビットストリームの各マクロブロックのうち動き補償予測を適用しているマクロブロックについて、該動き補償予測を適用しているマクロブロック内の各直交変換ブロック内の直交変換係数および参照フレーム番号を取得し、前記マクロブロック層パラメータ解析部で取得された前記参照フレーム番号により求められるフレーム間距離によって平均化された予測誤差信号電力を基に時間的劣化特徴量を求める時間的劣化特徴量計算部をさらに具備した点に第3の特徴がある。
【発明の効果】
【0021】
本発明の前記第1〜3の特徴によれば、符号化前の原画像のみならず、復号後のベースバンド信号をも用いることなく、圧縮ビットストリーム内のパラメータ抽出のみにより、符号化映像の主観画質が推定可能な客観画像評価装置を実現できるようになる。すなわち、ベースバンド画像を処理するのに比べて大幅な処理の軽量化を実現できる客観画像評価装置を提供できるようになる。
【0022】
また、受信側情報のみを利用する簡易な映像品質の客観画像評価装置および自動監視装置を提供できるようになる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態の概略の構成を示すブロック図である。
【図2】8×8変換ブロックにおけるマクロブロック(MB)の空間的劣化特徴量の説明図である。
【図3】4×4変換ブロックにおけるマクロブロック(MB)の空間的劣化特徴量の説明図である。
【図4】4×4変換ブロックにおけるマクロブロック(MB)の空間的劣化特徴量の説明図である。
【図5】時間的劣化特徴量計算部の処理の一例を示すフローチャートである。
【図6】図5のステップS5の詳細を示すフローチャートである。
【図7】図6のステップS12の処理の説明図である。
【図8】図6の処理の説明図である。
【図9】回帰分析の説明図である。
【発明を実施するための形態】
【0024】
以下に、図面を参照して、本発明を詳細に説明する。図1は、本発明の一実施形態の構成を示すブロック図である。この実施形態は、圧縮符号化されたビットストリーム情報を入力とし、客観評価尺度(すなわち、総合品質)を出力とする映像品質の客観画質評価装置である。
【0025】
該客観画質評価装置は、図1に示されているように、MB(マクロブロック)層パラメータ解析部1,量子化スケール平均値計算部2,空間的劣化特徴量計算部3,時間的劣化特徴量計算部4および特徴量統合部5から構成される。これらの処理部の詳細について、以下に説明する。
【0026】
(A)MB層パラメータ解析部1
【0027】
MB層パラメータ解析部1には、圧縮符号化されたビットストリーム情報(以下、「入力ビットストリーム」と呼ぶ)が入力する。MB層パラメータ解析部1は入力ビットストリームおよびその復号過程で生成される中間コード情報である符号化パラメータ情報、つまり後段の量子化スケール平均値計算部2,空間的劣化特徴量計算部3および時間的劣化特徴量計算部4で必要となる符号化パラメータ情報を、入力ビットストリームから抽出する。入力ビットストリームから取得される符号化パラメータ情報は、次のようなものである。
【0028】
(1)量子化スケールサイズ情報(qp):これは当該MBのqp値(量子化の分母)である。
【0029】
(2)スライスタイプ情報:この情報は,I,P,Bスライスのいずれかであり、SI,SPスライスは、それぞれI,Pスライスと解釈する。
【0030】
(3)変換係数:これは、MB内の各直交変換ブロック内の直交変換係数である。
【0031】
(4)参照フレーム情報:これは、当該MBが動きベクトルを持っている場合に限り、その参照フレーム情報を出力する。当該MBが双予測を適用している場合には、2つの参照フレームを、その参照番号が小さい順に出力するものとする。
【0032】
符号化パラメータは、ビットストリームから直接抽出できる場合と、復号時の中間情報として取得できる場合とに分類されるが、本発明では、圧縮ビットストリームの種類を限定しないため、情報の抽出方法は符号化方式に従うものとし、その詳細な手法についての説明は省略する。
【0033】
(B)量子化スケール平均値計算部2
【0034】
MB層パラメータ解析部1から各MBの量子化スケールサイズ情報(qp)およびスライスタイプ情報(I/B/P)を取得し、各スライスタイプ(I,P,B)における量子化スケールサイズのシーケンス内平均aQI,aQP,aQB、例えば評価対象の画像の始めから終わりまでのフレームにおける各スライスタイプにおける量子化スケールサイズの平均を求める。該量子化スケールサイズのシーケンス内平均値は、原画像−復号画像間の差分電力(PSNR)と高い相関を有することが知られている。本発明では、原画像を用いることができないため、原理的にPSNRを計算することは不可能であるが、このように量子化スケールサイズを活用することにより、シーケンス全体での劣化程度を把握することが可能になる。
【0035】
(C)空間的劣化特徴量計算部3
【0036】
空間的劣化特徴量計算部3は、前記非特許文献3におけるブロック歪特徴量計算部に相当する機能を提供することを目的に構成されている。すなわち、該空間的劣化特徴量計算部3は、復号画像上のブロック歪の視覚的な認識程度を示す指標を出力することを目的とするものである。ブロック歪は、MPEG−2やH.264などのブロック単位の処理を行う符号化画像における共通の劣化要素であり、その劣化度は主観画質と高い相関を持つと考えられる。ブロック歪は、画素ブロックの境界で信号値が大きく変化することにより発生する。換言すると、ブロック間の直流成分が大きく変化している場合に視覚的に目立つようになるといえる。
【0037】
そこで、本実施形態では、空間的劣化特徴量を隣接する8×8画素ブロック間の直流成分の差分二乗平均値により定義する。
【0038】
MB内の直交変換ブロックのサイズが8×8の場合、MB(B)内には、図2に示すように、4つの直交変換ブロック(0〜3)が存在する。いま、該直交変換ブロック(0〜3)の直流成分を、DC[B,S](S=0,1,2,3)と表記するとき、MBにおける空間的劣化特徴量SI(B)は、下記の数1で定義される。
【0039】
【数1】
【0040】
一方、MB内の直交変換ブロックのサイズが4×4の場合、MB(B)内には、図3に示すように、16個の直交変換ブロックが存在することになる。この場合には、4×4変換ブロック境界間で直流成分を調べるのではなく、MBが図4のブロック番号{0,1,2,3}、{4,5,6,7}、{8,9,10,11}および{12,13,14,15}の各集合からなる4つの8×8画素ブロックで構成されているとみなし、この8×8画素ブロック間での直流成分の差を求めるようにする。
【0041】
具体的には、(1)図4の左図において、ブロック番号{0,1,2,3}の4個の4×4変換ブロックの直流値の平均AV0を求める。同様に、ブロック番号{4,5,6,7}、{8,9,10,11}および{12,13,14,15}の各々の4個の4×4変換ブロックの直流値の平均AV1、AV2およびAV3を求める。(2)図4の右図に示されているように、前記AV0〜AV3のそれぞれを8×8画素ブロックの直流値とみなして、8×8画素ブロック間の差分を計算する。
【0042】
サイズが4×4の場合の8×8画素ブロックの直流成分DC[B,k](k=0,1,2,3)は、4×4直交変換ブロックにおける直流値DC4×4[B,S](S=0〜15)を用いて下記の数2のように表される。
【0043】
【数2】
【0044】
前記直流成分DC[B,k]が求まると、後は、8×8変換ブロックの場合と同様に数1を用いて空間的劣化特徴量SI(B)を算出する。
【0045】
最終的に、空間的劣化特徴量SIは、全てのMBにおける空間的劣化特徴量の平均値、すなわち下記の数3で定義される。
【0046】
【数3】
【0047】
ここで、NBはシーケンス内のMBの総数である。
【0048】
(D)時間的劣化特徴量計算部4
【0049】
時間的劣化特徴量計算部4は、前記非特許文献3におけるフリッカ特徴量計算部に相当する機能を提供することを目的に構成されている。すなわち、該時間的劣化特徴量計算部4は、復号画像上のフリッカ妨害の視覚的な認識程度を示す指標を出力することを目的とするものである。ここに、フリッカ妨害は、動き補償予測符号化のイントラフレーム挿入の周期ごとに大きな品質変動がある場合などに検知される劣化であり、連続するフレーム間での輝度変化が急激に発生することにより知覚される。ブロック歪と同様に主観画質との相関が高い映像特徴の一つである。
【0050】
該時間的劣化特徴量計算部4では、MB内の時間的な輝度値の変化を捉えるため、各画素ブロックにおける輝度のフレーム間差分を時間的劣化特徴量として定義する。また、該時間的劣化特徴量を計算するための入力として、各MBの直交変換係数と、動き補償予測における参照フレーム情報を利用する。なお、参照フレームが利用できないMBは本特徴量の計算対象外とする。
【0051】
以下に、図5のフローチャートを参照して、該時間的劣化特徴量計算部4の処理を説明する。この処理は、MB単位で処理することを前提としているが、これに限定されるものではない。
【0052】
まず、ステップS1では、処理対象のMBにおける参照フレーム番号を抽出する。参照フレーム番号とは、P,Bスライスの画像が参照するフレーム番号のことである。ここで、参照フレームが存在しない場合には当該ブロックを計算対象外とみなし、ステップS2の判断が肯定となって次のブロックの処理に進む。一方、参照フレームが存在する場合にはステップS3、S4に進んで、それぞれ、当該MBの直交変換係数を抽出し、動き補償予測誤差信号の電力を計算する。なお、該動き補償予測誤差信号の電力は、直交変換係数の二乗平均により求めることができる。
【0053】
MB内が8×8直交変換ブロックにより構成されている場合には、当該MB(B)の動き補償予測誤差信号電力P(B)は、下記の数4で表される。
【0054】
【数4】
【0055】
ここで、XB(i、j)は、ブロック(B)における直交変換係数、SmaxはMB内の直交変換ブロック数(8×8直交変換ブロックにより構成されていればSmax=4、また4×4直交変換ブロックで構成されていればSmax=16)、Nsizeは直交変換ブロックのサイズである(8×8直交変換ブロックにより構成されていればSsize=8、また4×4直交変換ブロックで構成されていればSsize=4)。
【0056】
ステップS5では、求められた前記MB(B)の動き補償予測誤差信号電力P(B)が各フレームの特徴量値(既に求められている動き補償予測誤差信号電力P(B))に加算される。該ステップS5の処理の詳細を、図6、図7、図8を参照して、以下に説明する。
【0057】
前記動き補償予測誤差信号電力は、ベースバンド信号から得られるフレーム2枚の予測フレーム間で発生したフレーム間差分電力の総和であるとみなすことができる。よって、該電力を参照フレーム間のフレームに対して均等に配分し、さらにこの操作をフレーム内の全ての動き補償予測の適用されているブロックに適用することにより、各フレームにおけるフレーム間差分電力を求めることができる。
【0058】
まず、図6のステップS11で、参照フレーム情報を取得する。ここに、参照フレームは最大2枚とし、これらをそれぞれfref0,fref1(ただし、fref0<fref1)とする。また、後の処理のために、現フレームをfcurと定義しておく。
【0059】
次に、ステップS12に進んで、参照フレームfref0,fref1と現フレームfcurに基づいてフレーム間距離Dを求める。具体的には、図7に示すように、参照フレーム数および参照フレームfref0,fref1と現フレームfcurの大小関係からfstart、fstopを定義するとき、フレーム間距離Dは、(fstop−fstart)により与えられる。
【0060】
すなわち、フレーム間距離は、マクロブロックに対して双予測が適用されている場合で、該双予測における参照フレームがマクロブロックの属する復号画像フレームに対して互いに逆方向に位置している場合には、2つの参照フレーム間の距離により与えられ、一方2つの参照フレームが該マクロブロックの属する復号画像フレームに対してそれぞれ同方向に位置している場合には、該2つの参照フレームのうちのマクロブロックの属する復号画像フレームとの距離が大きい側の参照フレームと前記復号画像フレームとの間の距離により与えられる。また、前記フレーム間距離は、マクロブロックに対して1つしか参照フレームが存在しない場合には、該参照フレームと該マクロブロックの属する復号画像フレームとの間の距離により与えられることになる。
【0061】
次に、ステップS13ではindexを初期化する(index=fstartと置く)。ステップS14では、前記[数4]で求めた直交変換係数の二乗平均によるMB内電力P(B)を前記フレーム間距離D、つまり(fstop−fstart)により割り算して平均し、その値を各フレームの電力値を積算する配列Pdist()に配分する。該配列Pdist()の括弧内には、フレーム番号のインデクスが記述される。なお、該配列Pdist()は、シーケンス先頭フレームの処理に先立って、全フレームの直交変換係数電力が0値に初期化されていることを前提とする。ステップS15では、index≦fstopが成立するか否かの判断がなされ、成立する場合にはステップS14に進んで、index値がインクリメントされる。前記ステップS14,S15およびS16の処理は、ステップS15の判断が否定になるまで続けられる。この処理により、Pdist(index)の要素に電力平均値P(B)/(fstop−fstart)が加算される。以上により、前記ステップS5が実現される。
【0062】
前記の処理を、図8で説明すると、フレーム番号0〜NFー1の配列Pdist()があったとすると、該配列Pdist()の全要素はシーケンス先頭フレームの処理に先立って0に初期化される。次に、現フレームfcurの参照フレームがfref0(fstart),fref1(fstop)とするとフレーム間距離Dは(fstop−fstart)となる。また、fref0の参照フレーム番号をNX、fref1の参照フレーム番号をNX+Dとし、予測誤差信号電力がP(B)であったとすると、前記ステップS14では、P(B)/Dにより電力平均値を算出し、該電力平均値を参照フレーム番号NX〜NX+Dの各配列Pdist(NX)〜Pdist(NX+D)に加算される。
【0063】
最終的に、時間的劣化特徴量は、前記配列Pdist()の全要素の平均により求められる。配列Pdist()の全要素数をNFとするとき、該時間的劣化特徴量TIは、下記の数5の式で表される。
【0064】
【数5】
【0065】
(E)特徴量統合部(又は客観画質導出部)5
【0066】
特徴量統合部5は、スライスタイプ別の量子化スケールの平均値{平均qp(Iスライス)、平均qp(Pスライス)、平均qp(Bスライス)}、空間的劣化特徴量、時間的劣化特徴量の各特徴量を統合し、客観画質を導出または客観評価尺度を求める。スライスタイプI,B,Pにおける量子化スケールの平均値をそれぞれaQI,aQP,aQB、空間的劣化特徴量をSI、時間的劣化特徴量をTIとすると、客観評価尺度Qobjは下記の数6式で求められる。
【0067】
【数6】
【0068】
ここで、f()は所与の関数を表す。最適な近似式は、評価対象の画像フォーマット、符号化方式、符号化ビットレートなどの条件によって異なるため、これらの条件のもとで主観評価値との相関が最大となる関数が選ばれる。
【0069】
前記関数f()の一例としては、wi(i=0〜4)を重み係数として、下記の数7のように、重み付き和で表す式を選ぶことができる。
【0070】
【数7】
【0071】
また、前記関数f()の他の例としては、wi(i=0〜4)、γj(j=1,2)を重み係数とする時、下記の数8で表される近似式を選ぶことができる。
【0072】
【数8】
【0073】
上式におけるwi(i=0〜4)、γj(j=1,2)は、客観評価値Qobjと主観評価値の相関が最大になるように設定される。すなわち、客観画質導出のための近似関数として、各特徴量をべき指数γ1でべき乗した数の重み付き和を、さらに前記べき指数とは異なるべき指数γ2でべき乗した数を用いて行うことができる。
【0074】
客観評価値と主観評価値の相関は、複数の評価映像を用いて得た客観評価値の系列と主観評価値の系列を回帰分析することにより得ることができる。
【0075】
回帰分析の一例を、図9を参照して説明する。図9のように、客観評価値を横軸に、主観評価値を縦軸にして、各データ系列をプロットした場合、両者はある回帰曲線で近似することが可能になる。回帰曲線としては、一次関数のほか、高次多項式やロジスティック関数などの非線形関数を適用することができる。客観画質評価の目的は主観評価値の推定であり、回帰曲線による近似の精度が高い、すなわちグラフ上の各プロット点と回帰曲線の距離が短い程、その性能が高いということができる。
【0076】
前記の実施形態では、量子化スケール平均値計算部2,空間的劣化特徴量計算部3および時間的劣化特徴量計算部4を用いたが、本発明はこれに限定されず、これらのうちの一つ又は複数個を用いるようにしてもよい。例えば、量子化スケール平均値計算部2のみを用いても良好な客観評価をすることができる。または、該量子化スケール平均値計算部2と空間的劣化特徴量計算部3または時間的劣化特徴量計算部4とを用いても良好な客観評価をすることができる。
【0077】
前記のようにして、特徴量統合部5から客観評価尺度Qobjが得られると、該客観評価尺度Qobjを自動的に監視し評価することにより、映像品質の自動監視を行うことができる。例えば、客観評価尺度Qobjを自動的に記録して残したり、所与の映像品質より悪くなった場合にはアラームを出力したりするなどの処理をすることができる。
【符号の説明】
【0078】
1・・・MB(マクロブロック)層パラメータ解析部、2・・・量子化スケール平均値計算部、3・・・空間的劣化特徴量計算部、4・・・時間的劣化特徴量計算部、5・・・特徴量統合部。
【特許請求の範囲】
【請求項1】
参照画像を用いずに映像の主観画質を推定する客観画質評価装置において、
圧縮ビットストリームから各マクロブロックに対して定義された量子化スケールサイズおよび該各マクロブロックが属するスライスの符号化タイプを少なくとも取得するマクロブロック層パラメータ解析部と、
前記スライスの符号化タイプ毎に量子化スケールサイズのシーケンス内平均を求める量子化スケール平均値計算部と、
前記量子化スケール平均値計算部で求められた量子化スケールサイズのシーケンス内平均を特徴量として客観画質を導出する客観画質導出部とを具備し、
前記圧縮ビットストリームのみを用いて 主観画質を推定することを特徴とする映像品質の客観画質評価装置。
【請求項2】
請求項1に記載の客観画質評価装置において、
前記マクロブロック層パラメータ解析部は前記圧縮ビットストリームから各マクロブロックの各直交変換ブロック内の直交変換係数を取得し、
該マクロブロック層パラメータ解析部で取得された前記各直交変換ブロック内の直交変換係数のうちの直流成分の平均値から前記各マクロブロック内の空間的劣化特徴量を求める空間的劣化特徴量計算部をさらに具備したことを特徴とする映像品質の客観画質評価装置。
【請求項3】
請求項1または2に記載の客観画質評価装置において、
前記マクロブロック層パラメータ解析部は前記圧縮ビットストリームの各マクロブロックのうち動き補償予測を適用しているマクロブロックについて、該動き補償予測を適用しているマクロブロック内の各直交変換ブロック内の直交変換係数および参照フレーム番号を取得し、
前記マクロブロック層パラメータ解析部で取得された前記参照フレーム番号により求められるフレーム間距離によって平均化された予測誤差信号電力を基に時間的劣化特徴量を求める時間的劣化特徴量計算部をさらに具備したことを特徴とする映像品質の客観画質評価装置。
【請求項4】
請求項3に記載の客観画質評価装置において、
前記フレーム間距離は、前記マクロブロックに対して双予測が適用されている場合で、該双予測における参照フレームが該マクロブロックの属する復号画像フレームに対して互いに逆方向に位置している場合には、2つの参照フレーム間の距離により与えられ、
前記2つの参照フレームが該マクロブロックの属する復号画像フレームに対してそれぞれ同方向に位置している場合には、該2つの参照フレームのうちの該マクロブロックの属する復号画像フレームとの距離が大きい側の参照フレームと前記復号画像フレームとの間の距離により与えられることを特徴とする映像品質の客観画質評価装置。
【請求項5】
請求項3または4に記載の客観画質評価装置において、
前記フレーム間距離は、前記マクロブロックに対して1つしか参照フレームが存在しない場合には、該参照フレームと該マクロブロックの属する復号画像フレームとの間の距離により与えられることを特徴とする映像品質の客観画質評価装置。
【請求項6】
請求項1ないし5のいずれかに記載の客観画質評価装置において、
前記客観画質導出部は、客観画質導出のための近似関数として、各特徴量の重み付き和を用いることを特徴とする映像品質の客観画質評価装置。
【請求項7】
請求項1ないし5のいずれかに記載の客観画質評価装置において、
前記客観画質導出部は、客観画質導出のための近似関数として、各特徴量をべき指数でべき乗した数の重み付き和を、さらに前記べき指数とは異なるべき指数でべき乗した数を用いることを特徴とする映像品質の客観画質評価装置。
【請求項8】
前記請求項1ないし7のいずれかに記載の客観画質評価装置を具備したことを特徴とする映像品質の自動監視装置。
【請求項1】
参照画像を用いずに映像の主観画質を推定する客観画質評価装置において、
圧縮ビットストリームから各マクロブロックに対して定義された量子化スケールサイズおよび該各マクロブロックが属するスライスの符号化タイプを少なくとも取得するマクロブロック層パラメータ解析部と、
前記スライスの符号化タイプ毎に量子化スケールサイズのシーケンス内平均を求める量子化スケール平均値計算部と、
前記量子化スケール平均値計算部で求められた量子化スケールサイズのシーケンス内平均を特徴量として客観画質を導出する客観画質導出部とを具備し、
前記圧縮ビットストリームのみを用いて 主観画質を推定することを特徴とする映像品質の客観画質評価装置。
【請求項2】
請求項1に記載の客観画質評価装置において、
前記マクロブロック層パラメータ解析部は前記圧縮ビットストリームから各マクロブロックの各直交変換ブロック内の直交変換係数を取得し、
該マクロブロック層パラメータ解析部で取得された前記各直交変換ブロック内の直交変換係数のうちの直流成分の平均値から前記各マクロブロック内の空間的劣化特徴量を求める空間的劣化特徴量計算部をさらに具備したことを特徴とする映像品質の客観画質評価装置。
【請求項3】
請求項1または2に記載の客観画質評価装置において、
前記マクロブロック層パラメータ解析部は前記圧縮ビットストリームの各マクロブロックのうち動き補償予測を適用しているマクロブロックについて、該動き補償予測を適用しているマクロブロック内の各直交変換ブロック内の直交変換係数および参照フレーム番号を取得し、
前記マクロブロック層パラメータ解析部で取得された前記参照フレーム番号により求められるフレーム間距離によって平均化された予測誤差信号電力を基に時間的劣化特徴量を求める時間的劣化特徴量計算部をさらに具備したことを特徴とする映像品質の客観画質評価装置。
【請求項4】
請求項3に記載の客観画質評価装置において、
前記フレーム間距離は、前記マクロブロックに対して双予測が適用されている場合で、該双予測における参照フレームが該マクロブロックの属する復号画像フレームに対して互いに逆方向に位置している場合には、2つの参照フレーム間の距離により与えられ、
前記2つの参照フレームが該マクロブロックの属する復号画像フレームに対してそれぞれ同方向に位置している場合には、該2つの参照フレームのうちの該マクロブロックの属する復号画像フレームとの距離が大きい側の参照フレームと前記復号画像フレームとの間の距離により与えられることを特徴とする映像品質の客観画質評価装置。
【請求項5】
請求項3または4に記載の客観画質評価装置において、
前記フレーム間距離は、前記マクロブロックに対して1つしか参照フレームが存在しない場合には、該参照フレームと該マクロブロックの属する復号画像フレームとの間の距離により与えられることを特徴とする映像品質の客観画質評価装置。
【請求項6】
請求項1ないし5のいずれかに記載の客観画質評価装置において、
前記客観画質導出部は、客観画質導出のための近似関数として、各特徴量の重み付き和を用いることを特徴とする映像品質の客観画質評価装置。
【請求項7】
請求項1ないし5のいずれかに記載の客観画質評価装置において、
前記客観画質導出部は、客観画質導出のための近似関数として、各特徴量をべき指数でべき乗した数の重み付き和を、さらに前記べき指数とは異なるべき指数でべき乗した数を用いることを特徴とする映像品質の客観画質評価装置。
【請求項8】
前記請求項1ないし7のいずれかに記載の客観画質評価装置を具備したことを特徴とする映像品質の自動監視装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−199380(P2011−199380A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−61103(P2010−61103)
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
[ Back to top ]