
映像記憶装置
【課題】乗員のプライバシーを極力保護しながら、車内及び車外を撮影した映像を記憶できる映像記憶装置を提供する。
【解決手段】車外撮影カメラ11は、車両に設置され、車両の外部を撮影する。車内撮影カメラ12は、車両に設置され、車両の内部を撮影する。記憶部6は、入力される映像を記憶する。セレクタ部4は、車内撮影カメラ11及び車外撮影カメラ12により撮影される映像をそれぞれ入力し、車内撮影カメラ11及び車外撮影カメラ12により撮影される映像のいずれかを記憶部6に出力する。判定部51は、車内撮影カメラ12から取得される情報に基づいて、セレクタ部4に、車内撮影カメラ12により撮影される映像を記憶部6に出力させる。
【解決手段】車外撮影カメラ11は、車両に設置され、車両の外部を撮影する。車内撮影カメラ12は、車両に設置され、車両の内部を撮影する。記憶部6は、入力される映像を記憶する。セレクタ部4は、車内撮影カメラ11及び車外撮影カメラ12により撮影される映像をそれぞれ入力し、車内撮影カメラ11及び車外撮影カメラ12により撮影される映像のいずれかを記憶部6に出力する。判定部51は、車内撮影カメラ12から取得される情報に基づいて、セレクタ部4に、車内撮影カメラ12により撮影される映像を記憶部6に出力させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車外及び車内を撮影する映像記憶装置に関する。
【背景技術】
【0002】
所定の条件が成立し、事故が発生したと判断される場合、事故発生前後の車外の映像を不揮発性の記憶領域に記憶させる車載映像記憶装置(ドライブレコーダ)が提案されており(特許文献1参照)、一般に普及し始めている。
【0003】
一方、タクシー、ハイヤー等の事業用自動車において、運転手が操作する手動スイッチ、またはドアの閉動作に連動する自動スイッチによって車内の映像の記録を開始する車載映像記憶装置が提案されている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−130114号公報
【特許文献2】特開2002−197560号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の車載映像記憶装置において、映像の記録の開始を手動スイッチにより行う方法では、運転手への負担が重く、また、ドアの閉動作に連動した自動スイッチにより行う方法では、不必要に不特定の乗客の映像を記憶するため、プライバシー保護の観点から問題があった。
【0006】
本発明は、乗員のプライバシーを極力保護しながら、車内及び車外を撮影した映像を記憶できる映像記憶装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の第1の態様は、車両(7)に設置され、車両(7)の外部を撮影する第1のカメラ(11)と、車両(7)に設置され、車両(7)の内部を撮影する第2のカメラ(12)と、入力される映像を記憶する記憶部(6)と、第1のカメラ(11)及び第2のカメラ(12)により撮影される映像をそれぞれ入力し、第1のカメラ(11)及び第2のカメラ(12)により撮影される映像のいずれかを記憶部(6)に出力するセレクタ部と、第2のカメラ(12)から取得される情報に基づいて、セレクタ部(4)に、第2のカメラ(12)により撮影される映像を記憶部(6)に出力させる判定部とを備える映像記憶装置であることを要旨とする。
【発明の効果】
【0008】
本発明によれば、車内撮影カメラから取得される情報に基づいて、車内撮影カメラの映像の記憶を開始するので、乗員のプライバシーを極力保護しながら、車内及び車外を撮影した映像を記憶できる映像記憶装置を提供することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の第1の実施の形態に係る映像記憶装置の基本的な構成を説明する模式的なブロック図である。
【図2】本発明の第1の実施の形態に係る映像記憶装置の配置を説明する、車両の模式的な上面図である。
【図3】本発明の第1の実施の形態に係る映像記憶装置の配置を説明する、車両の模式的な断面図である。
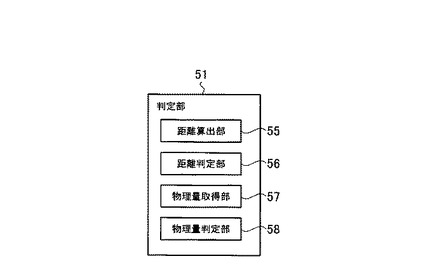
【図4】本発明の第1の実施の形態に係る映像記憶装置の判定部を説明する模式的なブロック図である。
【図5】本発明の第1の実施の形態に係る映像記憶方法を説明するフローチャートである。
【図6】本発明の第1の実施の形態に係る映像記憶方法の内、距離算出部の処理の内容を説明するフローチャートである。
【図7】本発明の第2の実施の形態に係る映像記憶方法の内、距離算出部の処理の内容を説明するフローチャートである。
【発明を実施するための形態】
【0010】
次に、図面を参照して、本発明の第1及び第2の実施の形態を説明する。以下の図面の記載において、同一又は類似の部分には同一又は類似の符号を付している。但し、以下に示す第1及び第2の実施の形態は、本発明の技術的思想を具体化するための装置や方法、及びこれらの装置に用いられるプログラムを例示するものであって、本発明の技術的思想は、下記の実施の形態に例示した装置や方法、及びこれらの装置に用いられるプログラムに特定するものでない。本発明の技術的思想は、特許請求の範囲に記載された技術的範囲内において、種々の変更を加えることができる。
【0011】
(第1の実施の形態)
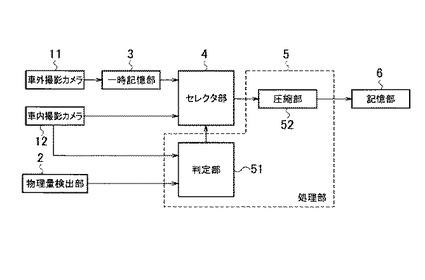
本発明の第1の実施の形態に係る映像記憶装置は、図1に示すように、車両の外部を撮影する車外撮影カメラ11と、車両の内部を撮影する車内撮影カメラ12と、物理量検出部2と、一時記憶部3と、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像をそれぞれ入力し、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像の何れかを出力するセレクタ部4と、処理部5と、入力される映像を記憶する記憶部6とを備える。
【0012】
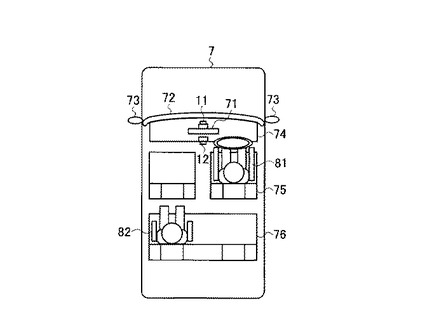
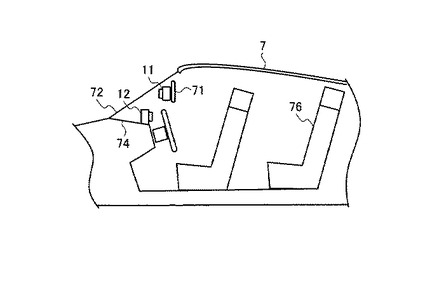
車外撮影カメラ11は、図2及び図3に示すように、例えば、車両7のルームミラー71に設置され、フロントガラス72を介して、他の車両、信号機、道路等、車両7の外部前方を撮影する。車外撮影カメラ11は、ドアミラー73、車両7の前部等、車両7の外部に設置されても良い。
【0013】
車内撮影カメラ12は、図2及び図3に示すように、例えば、車両7のコンソール74上に設置され、車両7の後部座席76、後部座席76に座る乗員82等、車両7の内部後方を撮影する。車内撮影カメラ12は、車両7の内部後方を撮影可能なように、ルームミラー71等に設置されても良い。
【0014】
第1の実施の形態に係る映像記憶装置が備える車内撮影カメラ12は、撮影する映像の焦点を自動的に調節する自動焦点調節機構を備える。車内撮影カメラ12の焦点の調節は、例えば、像鮮鋭度(コントラスト)検出方式、位相差検出方式、三角測距方式等の様々な方式を採用可能である。車内撮影カメラ12は、車内撮影カメラ12のレンズの焦点距離、レンズの主点から結像面までの距離、映像の焦点が合っているか否かの情報等を、焦点情報として処理部5に出力する。
【0015】
車内撮影カメラ12が撮影する映像に、車両7の前部座席75、及び前部座席75に座る運転手81等を含む場合、車内撮影カメラ12が撮影する映像のうち、前部座席75、及び前部座席75上の運転手81等を含む領域が、車内撮影カメラ12が自動的に映像の焦点を合わせる対象の領域から除外されるように車内撮影カメラ12を設置すれば良い。
【0016】
物理量検出部2は、車両7の挙動を示す物理量を検出し、検出する物理量を処理部5に出力する。物理量検出部2は、例えば、加速度、傾き、角速度等の物理量を検出する加速度センサ、ジャイロセンサ等の物理量センサから構成される。また、物理量検出部2は、図示を省略したエンジンコントロールユニット(ECU)に接続され、車両7の速度、エンジンの回転数等を取得するようにしても良い。
【0017】
一時記憶部3は、車外撮影カメラ11が撮影する映像を循環的に一時記憶する。一時記憶部3は、例えば、SRAM、DRAM等の揮発性の記憶装置から構成できる。一時記憶部3に循環的に一時記憶される映像の時間の長さは、例えば、3秒〜60秒とすることができる。
【0018】
セレクタ部4は、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像をそれぞれ入力し、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像のうち、処理部5が指定する映像を出力する。
【0019】
処理部5は、セレクタ部4が出力する映像を、セレクタ部4に対して指定する判定部51と、セレクタ部4が出力する映像を圧縮する圧縮部52とを論理構造として有する。処理部5は、その他、第1の実施の形態に係る映像記憶装置が行う種々の演算を処理する。
【0020】
判定部51は、図4に示すように、距離算出部55と、距離判定部56と、物理量取得部57と、物理量判定部58とを論理構造として有する。
【0021】
距離算出部55は、車内撮影カメラ12により撮影される映像、車内撮影カメラ12の焦点情報等、車内撮影カメラ12から取得される情報に基づいて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離を算出する。
【0022】
例えば、車内撮影カメラ12の焦点距離f、レンズの主点と結像面との間の距離bを、車内撮影カメラ12から取得される焦点情報とすると、距離算出部55は、式(1)を用いて、レンズの主点と被写体との間の距離aを、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離として算出することができる。
【0023】
1/a+1/b=1/f …(1)
例えば、車内撮影カメラ12の焦点距離f=50mm、レンズの主点と結像面との間の距離b=52mmとすると、距離算出部55は、レンズの主点と被写体との間の距離a=1300mmを、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離として算出する。
【0024】
距離判定部56は、距離算出部55が算出した車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離と、閾値となる所定の距離とを比較し、距離算出部55が算出した距離が、閾値となる所定の距離未満か否かを判定する。距離判定部56は、距離算出部55が算出した距離が、閾値未満である場合において、セレクタ部4に対し、セレクタ部4が出力する映像として、車内撮影カメラ12により撮影される映像を指定する。セレクタ部4は、距離判定部56の指定を受けてから所定の時間、車内撮影カメラ12により撮影される映像を出力する。
【0025】
距離判定部56が、閾値として用いる所定の距離は、例えば、車内撮影カメラ12から前部座席75までの間の距離、車内撮影カメラ12から前部座席75の前後それぞれ30cmまでの間の距離等とすることができる。セレクタ部4が、距離判定部56による指定を受けてから、車内撮影カメラ12により撮影される映像を出力する所定時間は、例えば5〜60秒とすることができる。
【0026】
物理量取得部57は、物理量検出部2から、物理量検出部2により検出される物理量を取得する。
【0027】
物理量判定部58は、物理量取得部57が取得した物理量と、閾値となる所定の量とを比較し、物理量取得部57が取得した物理量が、閾値となる所定の量より大きいか否かを判定する。物理量判定部58は、物理量取得部57が取得した物理量が閾値より大きい場合において、セレクタ部4に対し、セレクタ部4が出力する映像として、車外撮影カメラ11により撮影され、一時記憶部3に一時記憶された映像を指定する。セレクタ部4は、物理量判定部58の指定を受け、一時記憶部3に一時記憶された映像の他、物理量指定部58の指定を受けてから所定の時間、車外撮影カメラ11により撮影される映像を出力する。セレクタ部4が、物理量判定部58による指定を受けてから、車外撮影カメラ11により撮影される映像を出力する所定時間は、例えば5〜60秒とすることができる。
【0028】
圧縮部52は、判定部51の指定によりセレクタ部4が出力する映像を圧縮する。圧縮部52は、圧縮した映像を記憶部6に出力し、出力した映像を記憶部6に記憶させる。圧縮部52が行う圧縮処理は、MPEG(Moving Picture Experts Group)、モーションJPEG(Motion Joint Photographic Experts Group)、国際電気通信連合電気通信標準化部門(ITU−T)のHシリーズ規格等の種々の圧縮方式を採用可能である。
【0029】
記憶部6は、セレクタ部4により出力され、圧縮部52により圧縮された映像を記憶する。記憶部6は、例えば、ハードディスク(HD)等の磁気ディスク、磁気テープ、光ディスク、光磁気ディスク等の不揮発性の記憶装置から構成できる。記憶部6は、その他、RAMディスク、ICカード、フラッシュメモリカード、USBフラッシュメモリ、フラッシュディスク(SSD)等を採用可能である。
【0030】
なお、図1に示す処理部5の判定部51、圧縮部52、図4に示す判定部51の距離算出部55、距離判定部56、物理量取得部57、物理量判定部58等は、それぞれ論理構造としての表示であり、それぞれ同一のハードウェアである演算処理装置により構成されて良く、別個のハードウェアにより構成されても構わない。
【0031】
<映像記憶方法>
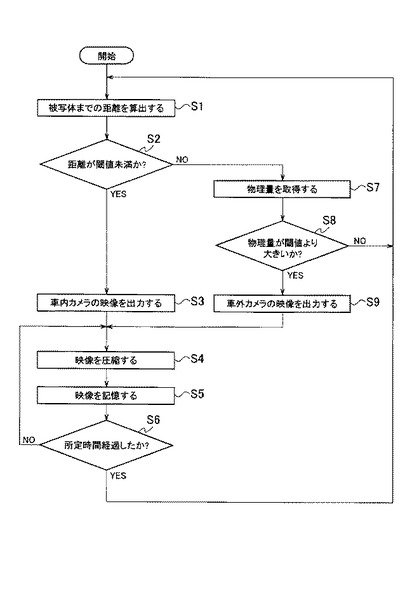
図5のフローチャートを用いて、第1の実施の形態に係る映像記憶方法について説明する。なお、以下に述べる映像記憶方法は、第1の実施の形態に係る映像記憶装置に適用可能な一例であり、これ以外の種々の映像記憶方法が第1の実施の形態に係る映像記憶装置に適用可能であることは勿論である。
【0032】
先ず、ステップS1において、判定部51の距離算出部55は、車内撮影カメラ12から取得される情報に基づいて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの距離を算出する。
【0033】
ステップS2において、距離判定部56は、距離算出部55が算出した距離と、閾値となる所定の距離とを比較し、距離算出部55が算出した距離が閾値未満か否かを判定する。
【0034】
ステップS2において距離判定部56が、距離算出部55が算出した距離が閾値未満であると判定する場合、ステップS3において、距離判定部56は、セレクタ部4に対し、セレクタ部4が出力する映像として、車内撮影カメラ12により撮影される映像を指定する。セレクタ部4は、距離判定部56の指定により、車内撮影カメラ12により撮影される映像を出力し、ステップS4に進む。
【0035】
ステップS2において距離判定部56が、距離算出部55が算出した距離が閾値未満でないと判定する場合、ステップS7において、物理量取得部57は、物理量検出部2から、物理量検出部2により検出される物理量を取得する。
【0036】
ステップS8において、物理量判定部58は、物理量取得部57が取得した物理量と、閾値となる所定の量とを比較し、物理量取得部57が取得した物理量が閾値より大きいか否かを判定する。
【0037】
ステップS8において物理量判定部58が、物理量取得部57が取得した物理量が閾値より大きいと判定する場合、ステップS9において、物理量判定部58は、セレクタ部4に対し、セレクタ部4が出力する映像として、車外撮影カメラ11により撮影される映像を指定する。セレクタ部4は、物理量判定部58の指定により、車外撮影カメラ11により撮影される映像を出力し、ステップS4に進む。
【0038】
ステップS8において物理量判定部58が、物理量取得部57が取得した物理量が閾値より大きくないと判定する場合は、ステップS1に戻る。
【0039】
ステップS4において、圧縮部52は、セレクタ部4が出力する映像を圧縮し、圧縮した記憶部6に出力する。
【0040】
ステップS5において、記憶部6は、セレクタ部4により出力され、圧縮部52により圧縮された映像を入力し、映像の記憶を開始する。
【0041】
ステップS6において、処理部5は、セレクタ部4により出力された映像をステップS4において圧縮し、ステップS5において記憶部6に記憶させる時間が、所定の時間経過したか否かを判定する。処理部5が、所定時間経過していないと判定する場合は、ステップS4に戻る。処理部5が、所定時間経過したと判定する場合は、ステップS1に戻る。
【0042】
<距離算出部55の処理の内容>
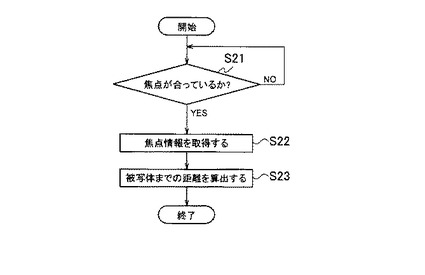
図6のフローチャートを用いて、上述した図5のフローチャートのステップS1の、距離算出部55の処理の内容を説明する。
【0043】
先ず、ステップS21において、距離算出部55は、車内撮影カメラ12から取得される焦点情報に基づいて、車内撮影カメラ12が撮影する映像の焦点が合っているか否かを判定する。距離算出部55が、車内撮影カメラ12が撮影する映像の焦点が合っていないと判定する場合、距離算出部55は、ステップS21の処理を繰り返す。
【0044】
ステップS21において距離算出部55が、車内撮影カメラ12が撮影する映像の焦点が合っていると判定する場合、ステップS22において、距離算出部55は、車内撮影カメラ12から焦点情報を取得する。
【0045】
ステップS23において、距離算出部55は、車内撮影カメラ12から取得した焦点情報に基づいて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの距離を算出し、終了する。
【0046】
本発明の第1の実施の形態に係る映像記憶装置によれば、車内撮影カメラ12から取得される情報に基づいて、被写体が前部座席75に接近したと判断される場合に、車内撮影カメラ12の映像の記憶を開始できる。よって、不必要に前部座席75に近づく乗員に対して、撮影した映像の記憶を開始でき、一般の乗員のプライバシーを保護できる。また、映像を記憶する記憶領域を節約できる。本発明の第1の実施の形態に係る映像記憶装置によれば、車内撮影用と車外撮影用の映像記憶装置を兼用するので、コストを低減できる。
【0047】
(第2の実施の形態)
本発明の第2の実施の形態に係る映像処置装置は、判定部51の距離算出部55が、車内撮影カメラ12により撮影される映像から顔を検出し、検出される顔を用いて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離を算出する点において第1の実施の形態と異なる。
【0048】
一般に、人の顔の大きさは、人によらずほぼ一定である。第2の実施の形態に係る映像記憶装置は、車内撮影カメラ12と、被写体である顔との距離によって、車内撮影カメラ12の映像における顔の大きさが変化することを利用して、車内撮影カメラ12から顔(被写体)までの間の距離を算出する。
【0049】
第2の実施の形態に係る映像記憶装置の距離算出部55は、車内撮影カメラ12により撮影される映像から、映像を構成する静止画(フレーム)を取得し、顔認識技術により、フレーム中に表示される顔を検出する。顔認識技術は、目、鼻、口等の明暗パターン等によって、画像中に顔の領域を検出する技術である。距離算出部55は、映像のフレームにおける顔の大きさを用いて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離を算出する。
【0050】
例えば、車内撮影カメラ12の撮像素子上の顔の大きさV、実際の顔の大きさY、車内撮影カメラ12の焦点距離fとすると、距離算出部55は、式(2)を用いて、車内撮影カメラ12と検出される顔との間の距離Zを、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離として算出することができる。
【0051】
Z=fY/V …(2)
車内撮影カメラ12の撮像素子上の顔の大きさVは、映像のフレームにおける顔の大きさから、車内撮影カメラ12の撮像素子の画素数、画素間の距離(画素ピッチ)を用いて算出できる。
【0052】
車内撮影カメラ12の撮像素子上の顔の大きさVは、例えば、車内撮影カメラ12の撮像素子上の検出された顔の領域の垂直方向の長さとすることができる。この場合、距離算出部55は、距離の算出に際し、映像における顔の大きさと、実際の顔の大きさYと共に、車内撮影カメラ12の撮像素子上の顔の大きさVと同様に顔の垂直方向の長さを用いる。
【0053】
例えば、車内撮影カメラ12の焦点距離f=50mm、実際の顔の大きさY=250mm、車内撮影カメラ12の撮像素子上の顔の大きさV=25mmとすると、距離算出部55は、車内撮影カメラ12と検出される顔との間の距離Z=500mmを、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離として算出する。
【0054】
車内撮影カメラ12により撮影される映像中に顔が検出されない場合、距離算出部55は、車内撮影カメラ12から後部座席76までの間の距離を予め保持し、車内撮影カメラ12から後部座席76までの間の距離を、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離とすれば良い。
【0055】
車内撮影カメラ12が撮影する映像に、前部座席75に座る運転手81等の顔を含む場合、運転手81等の顔を含む領域が、車内撮影カメラ12が撮影する映像の領域から除外されるように車内撮影カメラ12を設置すれば良い。
【0056】
第2の実施の形態に係る映像記憶装置の他の部分の説明は、第1の実施の形態に係る映像記憶装置の説明と同様であるので、重複する説明を省略する。
【0057】
<距離算出部55の処理の内容>
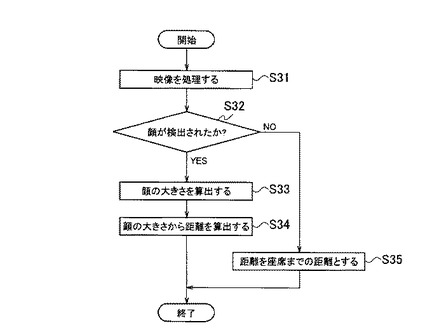
図7のフローチャートを用いて第2の実施の形態に係る映像記憶装置の距離算出部55の処理の内容を説明する。
【0058】
先ず、ステップS31において、距離算出部55は、車内撮影カメラ12により撮影される映像から、映像を構成するフレームを取得し、フレームに表示される顔を検出するための処理を行う。
【0059】
ステップS32において、距離算出部55は、フレームに顔が検出されたか否かを判定する。
【0060】
ステップS32において距離算出部55が、フレームに顔が検出されたと判定する場合、ステップS33において、距離算出部55は、フレームにおける顔の大きさから、車内撮影カメラ12の撮像素子上の顔の大きさVを算出する。
【0061】
ステップS34において、距離算出部55は、算出された顔の大きさを用いて、車内撮影カメラ12から車内撮影カメラ12が撮影する被写体までの間の距離を算出し、終了する。
【0062】
ステップS32において距離算出部55が、フレームに顔が検出されないと判定する場合、ステップS35において、距離算出部55は、車内撮影カメラ12から後部座席76までの間の距離を、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離とし、終了する。
【0063】
第2の実施の形態に係る映像記憶方法の他の処理の説明は、第1の実施の形態に係る映像記憶方法の説明と同様であるので、重複する説明を省略する。
【0064】
本発明の第2の実施の形態に係る映像記憶装置によれば、車内撮影カメラ12により撮影される映像に基づいて、後部座席76の乗員82が前部座席75に接近したと判断される場合に、車内撮影カメラ12の映像の記憶を開始できる。よって、不必要に前部座席75に近づく乗員に対して、撮影した映像の記憶を開始でき、一般の乗員のプライバシーを保護できる。また、映像を記憶する記憶領域を節約できる。本発明の第2の実施の形態に係る映像記憶装置によれば、車内撮影用と車外撮影用の映像記憶装置を兼用するので、コストを低減できる。
【0065】
また、本発明の第2の実施の形態に係る映像記憶装置によれば、顔認識技術により検出された映像における顔の大きさを用いて、車内撮影カメラ12から被写体までの間の距離を算出するので、車内撮影カメラ12が自動焦点調節機能を有さないカメラであっても、車内撮影カメラ12から被写体までの間の距離を算出できる。
【0066】
(その他の実施の形態)
上記のように、本発明は第1及び第2の実施の形態によって記載したが、この開示の一部をなす論述及び図面は本発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。
【0067】
既に述べた第1及び第2の実施の形態においては、車外撮影カメラ11における一時記憶部3と同様に、車内撮影カメラ12とセレクタ部4との間に、一時記憶部を介しても良い。
【0068】
また、既に述べた第1及び第2の実施の形態においては、セレクタ部4が、車外撮影カメラ11及び車内撮影カメラ12により撮影された映像を並列的に出力できるようにし、距離判定部55がセレクタ部4に対して、車内撮影カメラ12により撮影される映像を出力するように指定し、かつ物理量判定部58がセレクタ部4に対して、車外撮影カメラ11により撮影される映像を出力するように指定する場合、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像を処理部5が並列的に処理、圧縮し、記憶部6に記憶させるようにしても良い。
【0069】
また、既に述べた第1及び第2の実施の形態においては、車外撮影カメラ11とセレクタ部4との間に一時記憶部3を介さず、処理部5が、車外撮影カメラ11により撮影される映像を常時圧縮し、常時記憶部6に記憶させるようにしても良い。
【0070】
また、既に述べた第1及び第2の実施の形態に係る映像記憶装置は、車両7のバッテリーと直結される配線、電池等の電源供給部を備えることにより、車両7のエンジンが停止された場合においても、距離判定部56、物理量判定部58の判定により、車内撮影カメラ12、車外撮影カメラ11により撮影される映像をそれぞれ記憶できる。
【0071】
上記の他、第1及び第2の実施の形態を応用した構成等、本発明はここでは記載していない様々な実施の形態等を含むことは勿論である。したがって、本発明の技術的範囲は上記の説明から妥当な特許請求の範囲に係る発明特定事項によってのみ定められるものである。
【符号の説明】
【0072】
2…物理量検出部
3…一時記憶部
4…セレクタ部
5…処理部
6…記憶部
7…車両
11…車外撮影カメラ
12…車内撮影カメラ
51…判定部
52…圧縮部
55…距離算出部
56…距離判定部
57…物理量取得部
58…物理量判定部
71…ルームミラー
72…フロントガラス
73…ドアミラー
74…コンソール
75…前部座席
76…後部座席
81…運転手
82…乗員
【技術分野】
【0001】
本発明は、車外及び車内を撮影する映像記憶装置に関する。
【背景技術】
【0002】
所定の条件が成立し、事故が発生したと判断される場合、事故発生前後の車外の映像を不揮発性の記憶領域に記憶させる車載映像記憶装置(ドライブレコーダ)が提案されており(特許文献1参照)、一般に普及し始めている。
【0003】
一方、タクシー、ハイヤー等の事業用自動車において、運転手が操作する手動スイッチ、またはドアの閉動作に連動する自動スイッチによって車内の映像の記録を開始する車載映像記憶装置が提案されている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−130114号公報
【特許文献2】特開2002−197560号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の車載映像記憶装置において、映像の記録の開始を手動スイッチにより行う方法では、運転手への負担が重く、また、ドアの閉動作に連動した自動スイッチにより行う方法では、不必要に不特定の乗客の映像を記憶するため、プライバシー保護の観点から問題があった。
【0006】
本発明は、乗員のプライバシーを極力保護しながら、車内及び車外を撮影した映像を記憶できる映像記憶装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の第1の態様は、車両(7)に設置され、車両(7)の外部を撮影する第1のカメラ(11)と、車両(7)に設置され、車両(7)の内部を撮影する第2のカメラ(12)と、入力される映像を記憶する記憶部(6)と、第1のカメラ(11)及び第2のカメラ(12)により撮影される映像をそれぞれ入力し、第1のカメラ(11)及び第2のカメラ(12)により撮影される映像のいずれかを記憶部(6)に出力するセレクタ部と、第2のカメラ(12)から取得される情報に基づいて、セレクタ部(4)に、第2のカメラ(12)により撮影される映像を記憶部(6)に出力させる判定部とを備える映像記憶装置であることを要旨とする。
【発明の効果】
【0008】
本発明によれば、車内撮影カメラから取得される情報に基づいて、車内撮影カメラの映像の記憶を開始するので、乗員のプライバシーを極力保護しながら、車内及び車外を撮影した映像を記憶できる映像記憶装置を提供することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の第1の実施の形態に係る映像記憶装置の基本的な構成を説明する模式的なブロック図である。
【図2】本発明の第1の実施の形態に係る映像記憶装置の配置を説明する、車両の模式的な上面図である。
【図3】本発明の第1の実施の形態に係る映像記憶装置の配置を説明する、車両の模式的な断面図である。
【図4】本発明の第1の実施の形態に係る映像記憶装置の判定部を説明する模式的なブロック図である。
【図5】本発明の第1の実施の形態に係る映像記憶方法を説明するフローチャートである。
【図6】本発明の第1の実施の形態に係る映像記憶方法の内、距離算出部の処理の内容を説明するフローチャートである。
【図7】本発明の第2の実施の形態に係る映像記憶方法の内、距離算出部の処理の内容を説明するフローチャートである。
【発明を実施するための形態】
【0010】
次に、図面を参照して、本発明の第1及び第2の実施の形態を説明する。以下の図面の記載において、同一又は類似の部分には同一又は類似の符号を付している。但し、以下に示す第1及び第2の実施の形態は、本発明の技術的思想を具体化するための装置や方法、及びこれらの装置に用いられるプログラムを例示するものであって、本発明の技術的思想は、下記の実施の形態に例示した装置や方法、及びこれらの装置に用いられるプログラムに特定するものでない。本発明の技術的思想は、特許請求の範囲に記載された技術的範囲内において、種々の変更を加えることができる。
【0011】
(第1の実施の形態)
本発明の第1の実施の形態に係る映像記憶装置は、図1に示すように、車両の外部を撮影する車外撮影カメラ11と、車両の内部を撮影する車内撮影カメラ12と、物理量検出部2と、一時記憶部3と、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像をそれぞれ入力し、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像の何れかを出力するセレクタ部4と、処理部5と、入力される映像を記憶する記憶部6とを備える。
【0012】
車外撮影カメラ11は、図2及び図3に示すように、例えば、車両7のルームミラー71に設置され、フロントガラス72を介して、他の車両、信号機、道路等、車両7の外部前方を撮影する。車外撮影カメラ11は、ドアミラー73、車両7の前部等、車両7の外部に設置されても良い。
【0013】
車内撮影カメラ12は、図2及び図3に示すように、例えば、車両7のコンソール74上に設置され、車両7の後部座席76、後部座席76に座る乗員82等、車両7の内部後方を撮影する。車内撮影カメラ12は、車両7の内部後方を撮影可能なように、ルームミラー71等に設置されても良い。
【0014】
第1の実施の形態に係る映像記憶装置が備える車内撮影カメラ12は、撮影する映像の焦点を自動的に調節する自動焦点調節機構を備える。車内撮影カメラ12の焦点の調節は、例えば、像鮮鋭度(コントラスト)検出方式、位相差検出方式、三角測距方式等の様々な方式を採用可能である。車内撮影カメラ12は、車内撮影カメラ12のレンズの焦点距離、レンズの主点から結像面までの距離、映像の焦点が合っているか否かの情報等を、焦点情報として処理部5に出力する。
【0015】
車内撮影カメラ12が撮影する映像に、車両7の前部座席75、及び前部座席75に座る運転手81等を含む場合、車内撮影カメラ12が撮影する映像のうち、前部座席75、及び前部座席75上の運転手81等を含む領域が、車内撮影カメラ12が自動的に映像の焦点を合わせる対象の領域から除外されるように車内撮影カメラ12を設置すれば良い。
【0016】
物理量検出部2は、車両7の挙動を示す物理量を検出し、検出する物理量を処理部5に出力する。物理量検出部2は、例えば、加速度、傾き、角速度等の物理量を検出する加速度センサ、ジャイロセンサ等の物理量センサから構成される。また、物理量検出部2は、図示を省略したエンジンコントロールユニット(ECU)に接続され、車両7の速度、エンジンの回転数等を取得するようにしても良い。
【0017】
一時記憶部3は、車外撮影カメラ11が撮影する映像を循環的に一時記憶する。一時記憶部3は、例えば、SRAM、DRAM等の揮発性の記憶装置から構成できる。一時記憶部3に循環的に一時記憶される映像の時間の長さは、例えば、3秒〜60秒とすることができる。
【0018】
セレクタ部4は、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像をそれぞれ入力し、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像のうち、処理部5が指定する映像を出力する。
【0019】
処理部5は、セレクタ部4が出力する映像を、セレクタ部4に対して指定する判定部51と、セレクタ部4が出力する映像を圧縮する圧縮部52とを論理構造として有する。処理部5は、その他、第1の実施の形態に係る映像記憶装置が行う種々の演算を処理する。
【0020】
判定部51は、図4に示すように、距離算出部55と、距離判定部56と、物理量取得部57と、物理量判定部58とを論理構造として有する。
【0021】
距離算出部55は、車内撮影カメラ12により撮影される映像、車内撮影カメラ12の焦点情報等、車内撮影カメラ12から取得される情報に基づいて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離を算出する。
【0022】
例えば、車内撮影カメラ12の焦点距離f、レンズの主点と結像面との間の距離bを、車内撮影カメラ12から取得される焦点情報とすると、距離算出部55は、式(1)を用いて、レンズの主点と被写体との間の距離aを、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離として算出することができる。
【0023】
1/a+1/b=1/f …(1)
例えば、車内撮影カメラ12の焦点距離f=50mm、レンズの主点と結像面との間の距離b=52mmとすると、距離算出部55は、レンズの主点と被写体との間の距離a=1300mmを、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離として算出する。
【0024】
距離判定部56は、距離算出部55が算出した車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離と、閾値となる所定の距離とを比較し、距離算出部55が算出した距離が、閾値となる所定の距離未満か否かを判定する。距離判定部56は、距離算出部55が算出した距離が、閾値未満である場合において、セレクタ部4に対し、セレクタ部4が出力する映像として、車内撮影カメラ12により撮影される映像を指定する。セレクタ部4は、距離判定部56の指定を受けてから所定の時間、車内撮影カメラ12により撮影される映像を出力する。
【0025】
距離判定部56が、閾値として用いる所定の距離は、例えば、車内撮影カメラ12から前部座席75までの間の距離、車内撮影カメラ12から前部座席75の前後それぞれ30cmまでの間の距離等とすることができる。セレクタ部4が、距離判定部56による指定を受けてから、車内撮影カメラ12により撮影される映像を出力する所定時間は、例えば5〜60秒とすることができる。
【0026】
物理量取得部57は、物理量検出部2から、物理量検出部2により検出される物理量を取得する。
【0027】
物理量判定部58は、物理量取得部57が取得した物理量と、閾値となる所定の量とを比較し、物理量取得部57が取得した物理量が、閾値となる所定の量より大きいか否かを判定する。物理量判定部58は、物理量取得部57が取得した物理量が閾値より大きい場合において、セレクタ部4に対し、セレクタ部4が出力する映像として、車外撮影カメラ11により撮影され、一時記憶部3に一時記憶された映像を指定する。セレクタ部4は、物理量判定部58の指定を受け、一時記憶部3に一時記憶された映像の他、物理量指定部58の指定を受けてから所定の時間、車外撮影カメラ11により撮影される映像を出力する。セレクタ部4が、物理量判定部58による指定を受けてから、車外撮影カメラ11により撮影される映像を出力する所定時間は、例えば5〜60秒とすることができる。
【0028】
圧縮部52は、判定部51の指定によりセレクタ部4が出力する映像を圧縮する。圧縮部52は、圧縮した映像を記憶部6に出力し、出力した映像を記憶部6に記憶させる。圧縮部52が行う圧縮処理は、MPEG(Moving Picture Experts Group)、モーションJPEG(Motion Joint Photographic Experts Group)、国際電気通信連合電気通信標準化部門(ITU−T)のHシリーズ規格等の種々の圧縮方式を採用可能である。
【0029】
記憶部6は、セレクタ部4により出力され、圧縮部52により圧縮された映像を記憶する。記憶部6は、例えば、ハードディスク(HD)等の磁気ディスク、磁気テープ、光ディスク、光磁気ディスク等の不揮発性の記憶装置から構成できる。記憶部6は、その他、RAMディスク、ICカード、フラッシュメモリカード、USBフラッシュメモリ、フラッシュディスク(SSD)等を採用可能である。
【0030】
なお、図1に示す処理部5の判定部51、圧縮部52、図4に示す判定部51の距離算出部55、距離判定部56、物理量取得部57、物理量判定部58等は、それぞれ論理構造としての表示であり、それぞれ同一のハードウェアである演算処理装置により構成されて良く、別個のハードウェアにより構成されても構わない。
【0031】
<映像記憶方法>
図5のフローチャートを用いて、第1の実施の形態に係る映像記憶方法について説明する。なお、以下に述べる映像記憶方法は、第1の実施の形態に係る映像記憶装置に適用可能な一例であり、これ以外の種々の映像記憶方法が第1の実施の形態に係る映像記憶装置に適用可能であることは勿論である。
【0032】
先ず、ステップS1において、判定部51の距離算出部55は、車内撮影カメラ12から取得される情報に基づいて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの距離を算出する。
【0033】
ステップS2において、距離判定部56は、距離算出部55が算出した距離と、閾値となる所定の距離とを比較し、距離算出部55が算出した距離が閾値未満か否かを判定する。
【0034】
ステップS2において距離判定部56が、距離算出部55が算出した距離が閾値未満であると判定する場合、ステップS3において、距離判定部56は、セレクタ部4に対し、セレクタ部4が出力する映像として、車内撮影カメラ12により撮影される映像を指定する。セレクタ部4は、距離判定部56の指定により、車内撮影カメラ12により撮影される映像を出力し、ステップS4に進む。
【0035】
ステップS2において距離判定部56が、距離算出部55が算出した距離が閾値未満でないと判定する場合、ステップS7において、物理量取得部57は、物理量検出部2から、物理量検出部2により検出される物理量を取得する。
【0036】
ステップS8において、物理量判定部58は、物理量取得部57が取得した物理量と、閾値となる所定の量とを比較し、物理量取得部57が取得した物理量が閾値より大きいか否かを判定する。
【0037】
ステップS8において物理量判定部58が、物理量取得部57が取得した物理量が閾値より大きいと判定する場合、ステップS9において、物理量判定部58は、セレクタ部4に対し、セレクタ部4が出力する映像として、車外撮影カメラ11により撮影される映像を指定する。セレクタ部4は、物理量判定部58の指定により、車外撮影カメラ11により撮影される映像を出力し、ステップS4に進む。
【0038】
ステップS8において物理量判定部58が、物理量取得部57が取得した物理量が閾値より大きくないと判定する場合は、ステップS1に戻る。
【0039】
ステップS4において、圧縮部52は、セレクタ部4が出力する映像を圧縮し、圧縮した記憶部6に出力する。
【0040】
ステップS5において、記憶部6は、セレクタ部4により出力され、圧縮部52により圧縮された映像を入力し、映像の記憶を開始する。
【0041】
ステップS6において、処理部5は、セレクタ部4により出力された映像をステップS4において圧縮し、ステップS5において記憶部6に記憶させる時間が、所定の時間経過したか否かを判定する。処理部5が、所定時間経過していないと判定する場合は、ステップS4に戻る。処理部5が、所定時間経過したと判定する場合は、ステップS1に戻る。
【0042】
<距離算出部55の処理の内容>
図6のフローチャートを用いて、上述した図5のフローチャートのステップS1の、距離算出部55の処理の内容を説明する。
【0043】
先ず、ステップS21において、距離算出部55は、車内撮影カメラ12から取得される焦点情報に基づいて、車内撮影カメラ12が撮影する映像の焦点が合っているか否かを判定する。距離算出部55が、車内撮影カメラ12が撮影する映像の焦点が合っていないと判定する場合、距離算出部55は、ステップS21の処理を繰り返す。
【0044】
ステップS21において距離算出部55が、車内撮影カメラ12が撮影する映像の焦点が合っていると判定する場合、ステップS22において、距離算出部55は、車内撮影カメラ12から焦点情報を取得する。
【0045】
ステップS23において、距離算出部55は、車内撮影カメラ12から取得した焦点情報に基づいて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの距離を算出し、終了する。
【0046】
本発明の第1の実施の形態に係る映像記憶装置によれば、車内撮影カメラ12から取得される情報に基づいて、被写体が前部座席75に接近したと判断される場合に、車内撮影カメラ12の映像の記憶を開始できる。よって、不必要に前部座席75に近づく乗員に対して、撮影した映像の記憶を開始でき、一般の乗員のプライバシーを保護できる。また、映像を記憶する記憶領域を節約できる。本発明の第1の実施の形態に係る映像記憶装置によれば、車内撮影用と車外撮影用の映像記憶装置を兼用するので、コストを低減できる。
【0047】
(第2の実施の形態)
本発明の第2の実施の形態に係る映像処置装置は、判定部51の距離算出部55が、車内撮影カメラ12により撮影される映像から顔を検出し、検出される顔を用いて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離を算出する点において第1の実施の形態と異なる。
【0048】
一般に、人の顔の大きさは、人によらずほぼ一定である。第2の実施の形態に係る映像記憶装置は、車内撮影カメラ12と、被写体である顔との距離によって、車内撮影カメラ12の映像における顔の大きさが変化することを利用して、車内撮影カメラ12から顔(被写体)までの間の距離を算出する。
【0049】
第2の実施の形態に係る映像記憶装置の距離算出部55は、車内撮影カメラ12により撮影される映像から、映像を構成する静止画(フレーム)を取得し、顔認識技術により、フレーム中に表示される顔を検出する。顔認識技術は、目、鼻、口等の明暗パターン等によって、画像中に顔の領域を検出する技術である。距離算出部55は、映像のフレームにおける顔の大きさを用いて、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離を算出する。
【0050】
例えば、車内撮影カメラ12の撮像素子上の顔の大きさV、実際の顔の大きさY、車内撮影カメラ12の焦点距離fとすると、距離算出部55は、式(2)を用いて、車内撮影カメラ12と検出される顔との間の距離Zを、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離として算出することができる。
【0051】
Z=fY/V …(2)
車内撮影カメラ12の撮像素子上の顔の大きさVは、映像のフレームにおける顔の大きさから、車内撮影カメラ12の撮像素子の画素数、画素間の距離(画素ピッチ)を用いて算出できる。
【0052】
車内撮影カメラ12の撮像素子上の顔の大きさVは、例えば、車内撮影カメラ12の撮像素子上の検出された顔の領域の垂直方向の長さとすることができる。この場合、距離算出部55は、距離の算出に際し、映像における顔の大きさと、実際の顔の大きさYと共に、車内撮影カメラ12の撮像素子上の顔の大きさVと同様に顔の垂直方向の長さを用いる。
【0053】
例えば、車内撮影カメラ12の焦点距離f=50mm、実際の顔の大きさY=250mm、車内撮影カメラ12の撮像素子上の顔の大きさV=25mmとすると、距離算出部55は、車内撮影カメラ12と検出される顔との間の距離Z=500mmを、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離として算出する。
【0054】
車内撮影カメラ12により撮影される映像中に顔が検出されない場合、距離算出部55は、車内撮影カメラ12から後部座席76までの間の距離を予め保持し、車内撮影カメラ12から後部座席76までの間の距離を、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離とすれば良い。
【0055】
車内撮影カメラ12が撮影する映像に、前部座席75に座る運転手81等の顔を含む場合、運転手81等の顔を含む領域が、車内撮影カメラ12が撮影する映像の領域から除外されるように車内撮影カメラ12を設置すれば良い。
【0056】
第2の実施の形態に係る映像記憶装置の他の部分の説明は、第1の実施の形態に係る映像記憶装置の説明と同様であるので、重複する説明を省略する。
【0057】
<距離算出部55の処理の内容>
図7のフローチャートを用いて第2の実施の形態に係る映像記憶装置の距離算出部55の処理の内容を説明する。
【0058】
先ず、ステップS31において、距離算出部55は、車内撮影カメラ12により撮影される映像から、映像を構成するフレームを取得し、フレームに表示される顔を検出するための処理を行う。
【0059】
ステップS32において、距離算出部55は、フレームに顔が検出されたか否かを判定する。
【0060】
ステップS32において距離算出部55が、フレームに顔が検出されたと判定する場合、ステップS33において、距離算出部55は、フレームにおける顔の大きさから、車内撮影カメラ12の撮像素子上の顔の大きさVを算出する。
【0061】
ステップS34において、距離算出部55は、算出された顔の大きさを用いて、車内撮影カメラ12から車内撮影カメラ12が撮影する被写体までの間の距離を算出し、終了する。
【0062】
ステップS32において距離算出部55が、フレームに顔が検出されないと判定する場合、ステップS35において、距離算出部55は、車内撮影カメラ12から後部座席76までの間の距離を、車内撮影カメラ12から車内撮影カメラ12により撮影される被写体までの間の距離とし、終了する。
【0063】
第2の実施の形態に係る映像記憶方法の他の処理の説明は、第1の実施の形態に係る映像記憶方法の説明と同様であるので、重複する説明を省略する。
【0064】
本発明の第2の実施の形態に係る映像記憶装置によれば、車内撮影カメラ12により撮影される映像に基づいて、後部座席76の乗員82が前部座席75に接近したと判断される場合に、車内撮影カメラ12の映像の記憶を開始できる。よって、不必要に前部座席75に近づく乗員に対して、撮影した映像の記憶を開始でき、一般の乗員のプライバシーを保護できる。また、映像を記憶する記憶領域を節約できる。本発明の第2の実施の形態に係る映像記憶装置によれば、車内撮影用と車外撮影用の映像記憶装置を兼用するので、コストを低減できる。
【0065】
また、本発明の第2の実施の形態に係る映像記憶装置によれば、顔認識技術により検出された映像における顔の大きさを用いて、車内撮影カメラ12から被写体までの間の距離を算出するので、車内撮影カメラ12が自動焦点調節機能を有さないカメラであっても、車内撮影カメラ12から被写体までの間の距離を算出できる。
【0066】
(その他の実施の形態)
上記のように、本発明は第1及び第2の実施の形態によって記載したが、この開示の一部をなす論述及び図面は本発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。
【0067】
既に述べた第1及び第2の実施の形態においては、車外撮影カメラ11における一時記憶部3と同様に、車内撮影カメラ12とセレクタ部4との間に、一時記憶部を介しても良い。
【0068】
また、既に述べた第1及び第2の実施の形態においては、セレクタ部4が、車外撮影カメラ11及び車内撮影カメラ12により撮影された映像を並列的に出力できるようにし、距離判定部55がセレクタ部4に対して、車内撮影カメラ12により撮影される映像を出力するように指定し、かつ物理量判定部58がセレクタ部4に対して、車外撮影カメラ11により撮影される映像を出力するように指定する場合、車外撮影カメラ11及び車内撮影カメラ12により撮影される映像を処理部5が並列的に処理、圧縮し、記憶部6に記憶させるようにしても良い。
【0069】
また、既に述べた第1及び第2の実施の形態においては、車外撮影カメラ11とセレクタ部4との間に一時記憶部3を介さず、処理部5が、車外撮影カメラ11により撮影される映像を常時圧縮し、常時記憶部6に記憶させるようにしても良い。
【0070】
また、既に述べた第1及び第2の実施の形態に係る映像記憶装置は、車両7のバッテリーと直結される配線、電池等の電源供給部を備えることにより、車両7のエンジンが停止された場合においても、距離判定部56、物理量判定部58の判定により、車内撮影カメラ12、車外撮影カメラ11により撮影される映像をそれぞれ記憶できる。
【0071】
上記の他、第1及び第2の実施の形態を応用した構成等、本発明はここでは記載していない様々な実施の形態等を含むことは勿論である。したがって、本発明の技術的範囲は上記の説明から妥当な特許請求の範囲に係る発明特定事項によってのみ定められるものである。
【符号の説明】
【0072】
2…物理量検出部
3…一時記憶部
4…セレクタ部
5…処理部
6…記憶部
7…車両
11…車外撮影カメラ
12…車内撮影カメラ
51…判定部
52…圧縮部
55…距離算出部
56…距離判定部
57…物理量取得部
58…物理量判定部
71…ルームミラー
72…フロントガラス
73…ドアミラー
74…コンソール
75…前部座席
76…後部座席
81…運転手
82…乗員
【特許請求の範囲】
【請求項1】
車両に設置され、前記車両の外部を撮影する第1のカメラと、
前記車両に設置され、前記車両の内部を撮影する第2のカメラと、
入力される映像を記憶する記憶部と、
前記第1のカメラ及び前記第2のカメラにより撮影される映像をそれぞれ入力し、前記第1のカメラ及び前記第2のカメラにより撮影される映像のいずれかを前記記憶部に出力するセレクタ部と、
前記第2のカメラから取得される情報に基づいて、前記セレクタ部に、前記第2のカメラにより撮影される映像を前記記憶部に出力させる処理部と
を備えることを特徴とする映像記憶装置。
【請求項2】
前記処理部が、前記第2のカメラから取得される情報に基づいて、前記第2のカメラから前記第2のカメラにより撮影される被写体までの間の距離を算出し、
前記第2のカメラから前記被写体までの間の距離が閾値より小さくなった場合に、前記セレクタ部に、前記第2のカメラが撮影する映像を前記記憶部に出力させることを特徴とする請求項1に記載の映像記憶装置。
【請求項3】
前記第2のカメラが、撮影する映像の焦点を自動的に調節し、
前記処理部が、前記第2のカメラの焦点距離を用いて、前記第2のカメラから前記被写体までの間の距離を算出することを特徴とする請求項2に記載の映像記憶装置。
【請求項4】
前記処理部が、前記第2のカメラにより撮影される映像から顔を検出し、前記第2のカメラにより撮影される映像における前記顔の大きさを用いて、前記第2のカメラから前記被写体までの間の距離を算出することを特徴とする請求項2に記載の映像記憶装置。
【請求項1】
車両に設置され、前記車両の外部を撮影する第1のカメラと、
前記車両に設置され、前記車両の内部を撮影する第2のカメラと、
入力される映像を記憶する記憶部と、
前記第1のカメラ及び前記第2のカメラにより撮影される映像をそれぞれ入力し、前記第1のカメラ及び前記第2のカメラにより撮影される映像のいずれかを前記記憶部に出力するセレクタ部と、
前記第2のカメラから取得される情報に基づいて、前記セレクタ部に、前記第2のカメラにより撮影される映像を前記記憶部に出力させる処理部と
を備えることを特徴とする映像記憶装置。
【請求項2】
前記処理部が、前記第2のカメラから取得される情報に基づいて、前記第2のカメラから前記第2のカメラにより撮影される被写体までの間の距離を算出し、
前記第2のカメラから前記被写体までの間の距離が閾値より小さくなった場合に、前記セレクタ部に、前記第2のカメラが撮影する映像を前記記憶部に出力させることを特徴とする請求項1に記載の映像記憶装置。
【請求項3】
前記第2のカメラが、撮影する映像の焦点を自動的に調節し、
前記処理部が、前記第2のカメラの焦点距離を用いて、前記第2のカメラから前記被写体までの間の距離を算出することを特徴とする請求項2に記載の映像記憶装置。
【請求項4】
前記処理部が、前記第2のカメラにより撮影される映像から顔を検出し、前記第2のカメラにより撮影される映像における前記顔の大きさを用いて、前記第2のカメラから前記被写体までの間の距離を算出することを特徴とする請求項2に記載の映像記憶装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−105196(P2012−105196A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−253912(P2010−253912)
【出願日】平成22年11月12日(2010.11.12)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月12日(2010.11.12)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
[ Back to top ]