
映像評価装置、映像評価方法、およびプログラム

【課題】運動視差を利用した映像の奥行感を評価できる映像評価装置、映像評価方法、およびプログラムを提供すること。
【解決手段】映像評価装置1は、まず、映像を構成する画像に含まれる特徴点について、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付け、対応付けた各特徴点の世界座標系で表される3次元座標を推定する。次に、対応付けた特徴点を計数し、3次元座標を推定できた場合に、特徴点の計数値が大きくなるに従って、映像の奥行感を高く評価する。
【解決手段】映像評価装置1は、まず、映像を構成する画像に含まれる特徴点について、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付け、対応付けた各特徴点の世界座標系で表される3次元座標を推定する。次に、対応付けた特徴点を計数し、3次元座標を推定できた場合に、特徴点の計数値が大きくなるに従って、映像の奥行感を高く評価する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、映像評価装置、映像評価方法、およびプログラムに関する。
【背景技術】
【0002】
従来、臨場感の高い映像を撮影、配信、および閲覧する手法が提案されている。この臨場感の高い映像を用いるに際しては、臨場感の評価手法が必須となる。
【0003】
臨場感は、複数の要素によって成り立つと考えられるが、これら複数の要素のうちの1つとして、映像の奥行感を挙げることができる。そこで、映像がどの程度の奥行感を有しているのかを評価または推定する手法が必要である。また、コンテンツの作成や配信においては、客観評価方式により主観品質を推定することが求められる。
【0004】
ここで、上述の奥行感とは、奥行知覚、すなわち奥行方向の距離感を視聴者がどの程度得ることができるかということである。例えば、奥行感が無いとは、奥行方向の距離感を視聴者が得ることができないということである。なお、奥行感には、映像における奥行マップ(Depth Map)が存在するか否かは関係なく、奥行マップがあっても奥行知覚ができなければ、奥行感は無いと表現する。
【0005】
視聴者が奥行、立体、オブジェクト同士の距離関係などを感じる仕組みとしては、両眼視差、輻輳、フォーカス調整、運動視差などがある(例えば、非特許文献1参照)。
【0006】
特許文献1には、両眼視差を利用した立体映像の安全性や快適性について評価および管理する手法が示されている。この特許文献1に示されている手法では、まず、オプティカルフローを求める画像処理を用いて、左眼用画像と右眼用画像との対応点間の視差量を算出する。次に、視差量の絶対値の最大値または最小値を時系列で抽出し、評価用データとする。
【0007】
非特許文献2には、運動視差によって奥行を感じることに対応する、運動からの構造復元技術が示されている。この運動からの構造復元技術とは、特徴点位置の追跡を全画像で行い、反復計算により特徴点の位置およびカメラ位置を算出する。なお、推定の精度を向上させるため、例えばバンドル調整アルゴリズムを適用することができる。バンドル調整とは、画像からその背後にある幾何学的なモデルのパラメータを推定する方法であり、非線形最適化を数値的に実行するという特徴を有するものである。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−142819号公報
【非特許文献】
【0009】
【非特許文献1】金子、空間認識のための視覚情報処理、光学、31巻10号、771ページ、2002年
【非特許文献2】C. Tomsai and T. Kanade, "Shape and Motion from Image Streams: a Factorization Method Full Report on the Orthographic Case," International Journal of Computer Vision, Volume 9, Number 2, pp.137-154, 1992.
【非特許文献3】金谷健一、菅谷保之、因数分解法の完全レシピ、電子情報通信学会技術報告、PRMU2003−118(2003−10)、pp.19−24
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1に示されている手法は、立体映像のうち、両眼視差を利用したものを対象としている。このため、運動視差を利用した立体映像については、特許文献1に示されている手法を適用することができなかった。
【0011】
また、非特許部文献1には、視聴者が奥行等を感じる仕組みは示されている。しかしながら、これらの仕組みを用いた立体映像について奥行感を評価することは、示されていなかった。
【0012】
また、非特許文献2には、運動視差を利用した立体映像について奥行感を評価することは、示されていなかった。
【0013】
そこで、本発明は、上述の課題を鑑みてなされたものであり、運動視差を利用した立体映像の奥行感を評価できる映像評価装置、映像評価方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0014】
本発明者らは、上述の目的を達成すべく鋭意検討を行った。その結果、運動視差を利用した立体映像に、この立体映像に含まれる物体の角(コーナー)といった特徴点の空間における3次元座標が含まれている場合、すなわち立体構造が含まれている場合において、特徴点の数が多くなるに従って、この立体映像に対して視聴者が得る奥行感の程度が大きくなる傾向を見出し、本発明を完成させるに至った。
【0015】
(1) 本発明は、映像を評価する映像評価装置(例えば、図1の映像評価装置1に相当)であって、前記映像を構成する画像ごとに、特徴点(例えば、後述の2つ以上のエッジが交差するコーナーに相当)を抽出する特徴点抽出手段(例えば、図1の特徴点抽出部10に相当)と、前記特徴点抽出手段により抽出された特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける特徴点対応手段(例えば、図1の特徴点対応部20に相当)と、前記特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該特徴点対応手段により対応付けられた各特徴点について、世界座標系で表される3次元座標を推定する座標推定手段(例えば、図1の座標推定部30に相当)と、前記特徴点対応手段により対応付けられた特徴点を計数する特徴点計数手段(例えば、図1の特徴点計数部40に相当)と、前記座標推定手段による推定結果と、前記特徴点計数手段による計数結果と、に基づいて、前記映像を評価する評価手段(例えば、図1の評価部50に相当)と、を備え、前記評価手段は、前記座標推定手段により3次元座標を推定できた場合に、前記特徴点計数手段による計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価装置を提案している。
【0016】
この発明によれば、映像を評価する映像評価装置に、特徴点抽出手段、特徴点対応手段、座標推定手段、特徴点計数手段、および評価手段を設けた。そして、特徴点抽出手段により、映像を構成する画像ごとに特徴点を抽出し、特徴点対応手段により、特徴点抽出手段により抽出された特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付けることとした。また、座標推定手段により、特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、特徴点対応手段により対応付けられた各特徴点について、世界座標系で表される3次元座標を推定することとした。また、特徴点計数手段により、特徴点対応手段により対応付けられた特徴点を計数し、評価手段により、座標推定手段による推定結果と、特徴点計数手段による計数結果と、に基づいて、映像を評価することとした。評価手段による映像の評価については、座標推定手段により3次元座標を推定できた場合に、特徴点計数手段による計数値が大きくなるに従って映像の奥行感を高く評価することとした。
【0017】
このため、(1)の映像評価装置は、座標推定手段により3次元座標を推定できたか否かにより、映像に立体構造が含まれているか否かを判定できる。そして、映像に立体構造が含まれている場合には、特徴点の数が多くなるに従ってこの映像に対して視聴者が得る奥行感の程度が大きくなる傾向を利用して、特徴点の数が多くなるに従って映像の奥行感を高く評価することができる。一方、映像に立体構造が含まれていない場合には、映像に立体構造が含まれている場合と比べて、映像の奥行感を低く評価することができる。以上によれば、映像の奥行感を評価できる。
【0018】
また、(1)の映像評価装置では、映像を構成する画像が2つ以上存在すれば、特徴点対応手段により特徴点の対応関係を求めて、この特徴点の対応関係を用いて映像の奥行感を評価することができる。このため、両眼視差を利用した立体映像に限らず、運動視差を利用した立体映像についても、奥行感を評価できる。
【0019】
(2) 本発明は、(1)の映像評価装置について、前記映像について奥行の有無を判定する奥行有無判定手段(例えば、図5の奥行有無判定部60に相当)を備え、前記奥行有無判定手段は、前記座標推定手段により推定できた各特徴点の3次元座標を世界座標系からカメラ座標系に変換し、前記座標推定手段により3次元座標を推定できた特徴点ごとに、前記カメラ座標系における奥行方向の座標値を求め、前記座標推定手段により3次元座標を推定できた特徴点の中から、前記奥行方向の座標値の差分の絶対値が最も大きくなる2つを求め、前記2つの特徴点の前記奥行方向の座標値の差分の絶対値が予め定められた閾値以上であれば、奥行が存在すると判定し、前記評価手段は、前記座標推定手段により3次元座標を推定でき、かつ、前記奥行有無判定手段により奥行が存在すると判定された場合には、前記特徴点計数手段による計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価装置を提案している。
【0020】
ここで、(1)の映像評価装置において、座標推定手段により3次元座標を推定できたとしても、3次元座標を推定できた複数の特徴点のカメラ座標系における奥行方向の座標値が略等しければ、視聴者が得る奥行感の程度は小さくなってしまう。
【0021】
そこで、この発明によれば、(1)の映像評価装置に、映像について奥行の有無を判定する奥行有無判定手段を設けた。そして、奥行有無判定手段により、座標推定手段により推定できた各特徴点の3次元座標を世界座標系からカメラ座標系に変換し、座標推定手段により3次元座標を推定できた特徴点ごとに、カメラ座標系における奥行方向の座標値を求め、座標推定手段により3次元座標を推定できた特徴点の中から、奥行方向の座標値の差分の絶対値が最も大きくなる2つを求め、2つの特徴点の奥行方向の座標値の差分の絶対値が予め定められた閾値以上であれば、奥行が存在すると判定することとした。また、評価手段により、座標推定手段により3次元座標を推定でき、かつ、奥行有無判定手段により奥行が存在すると判定された場合に、特徴点計数手段による計数値が大きくなるに従って映像の奥行感を高く評価することとした。
【0022】
このため、(2)の映像評価装置は、3次元座標を推定できた複数の特徴点のカメラ座標系における奥行方向の座標値が予め定められた閾値以上であれば、奥行が存在すると判定し、映像の奥行感の評価に、この奥行の存在の有無を反映させることができる。したがって、映像の奥行感の評価に、視聴者が得る奥行感の程度をより忠実に反映させることができる。
【0023】
(3) 本発明は、(1)または(2)の映像評価装置について、前記特徴点は、2つ以上のエッジが交差するコーナーであることを特徴とする映像評価装置を提案している。
【0024】
この発明によれば、(1)または(2)の映像評価装置において、特徴点とは、2つ以上のエッジが交差するコーナーのこととした。このため、(3)の映像評価装置は、特徴点としてコーナーを用いて、上述した効果と同様の効果を奏することができる。
【0025】
(4) 本発明は、(1)〜(3)のいずれかの映像評価装置について、前記座標推定手段は、前記特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて反復計算アルゴリズムによる反復計算を行い、前記反復計算が収束すれば、前記世界座標系で表される3次元座標を推定できたものとし、前記反復計算が収束しなければ、前記世界座標系で表される3次元座標を推定できなかったものとすることを特徴とする映像評価装置を提案している。
【0026】
この発明によれば、(1)〜(3)のいずれかの映像評価装置において、座標推定手段により、特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて反復計算アルゴリズムによる反復計算を行い、反復計算が収束すれば、世界座標系で表される3次元座標を推定できたものとし、反復計算が収束しなければ、世界座標系で表される3次元座標を推定できなかったものとすることとした。
【0027】
このため、(4)の映像評価装置は、反復計算アルゴリズムを用いて、3次元座標を推定できたか否かを判定することができる。
【0028】
(5) 本発明は、(4)の映像評価装置について、前記座標推定手段は、前記反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下になれば、前記反復計算が収束したものとし、前記反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が前記第1閾値以下にならなければ、前記反復計算が収束しなかったものとすることを特徴とする映像評価装置を提案している。
【0029】
この発明によれば、(4)の映像評価装置において、座標推定手段により、反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下になれば、反復計算が収束したものとし、反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下にならなければ、反復計算が収束しなかったものとすることとした。
【0030】
このため、(5)の映像評価装置は、反復計算が収束したか否かを、前回の反復計算からの反復計算結果の変化が第1閾値以下であるか否かにより、判定できる。
【0031】
(6) 本発明は、(1)〜(5)のいずれかの映像評価装置について、前記特徴点計数手段は、前記特徴点対応手段により対応付けられた特徴点のうち、前記座標推定手段により3次元座標を推定できたものを計数することを特徴とする映像評価装置を提案している。
【0032】
この発明によれば、特徴点計数手段により、特徴点対応手段により対応付けられた特徴点のうち、座標推定手段により3次元座標を推定できたものを計数することとした。
【0033】
このため、座標推定手段により3次元座標を推定できなかった特徴点を、評価手段による映像の奥行感の評価に反映させないようにすることができる。これによれば、映像の奥行感をより的確に評価できる場合がある。
【0034】
(7) 本発明は、(1)〜(6)のいずれかの映像評価装置について、前記映像は、多視点映像であり、前記特徴点抽出手段は、前記多視点映像について、各視点の画像ごとに、特徴点を抽出し、前記特徴点対応手段は、前記特徴点抽出手段により抽出された特徴点のうち、同一の視点における互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けるとともに、前記特徴点抽出手段により抽出された特徴点のうち、互いに異なる視点における画像に含まれる特徴点であって同一の特徴点同士を対応付けることを特徴とする映像評価装置を提案している。
【0035】
この発明によれば、(1)〜(6)のいずれかの映像評価装置において、特徴点抽出手段により、多視点映像である映像について、各視点の画像ごとに、特徴点を抽出することとした。また、特徴点対応手段により、特徴点抽出手段により抽出された特徴点のうち、同一の視点における互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けるとともに、特徴点抽出手段により抽出された特徴点のうち、互いに異なる視点における画像に含まれる特徴点であって同一の特徴点同士を対応付けることとした。
【0036】
このため、(7)の映像評価装置は、多視点映像について、奥行感を評価できる。
【0037】
(8) 本発明は、映像を評価する映像評価方法であって、前記映像を構成する画像ごとに、特徴点(例えば、後述の2つ以上のエッジが交差するコーナーに相当)を抽出する第1のステップ(例えば、図2のステップS1の特徴点抽出処理に相当)と、前記第1のステップにおいて抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける第2のステップ(例えば、図2のステップS2の特徴点対応処理に相当)と、前記第2のステップにおいて対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該第2のステップにおいて対応付けた各特徴点について、世界座標系で表される3次元座標を推定する第3のステップ(例えば、図2のステップS3の座標推定処理に相当)と、前記第2のステップにおいて対応付けた特徴点を計数する第4のステップ(例えば、図2のステップS4の特徴点計数処理に相当)と、前記第3のステップにおける推定結果と、前記第4のステップにおける計数結果と、に基づいて、前記映像を評価する第5のステップ(例えば、図2のステップS5の奥行感評価処理に相当)と、を備え、前記第5のステップでは、前記第3のステップにおいて3次元座標を推定できた場合に、前記第4のステップにおける計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価方法を提案している。
【0038】
この発明によれば、まず、映像を構成する画像ごとに特徴点を抽出し、抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けることとした。次に、対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、対応付けた各特徴点について、世界座標系で表される3次元座標を推定し、対応付けた特徴点を計数することとした。次に、上述の3次元座標の推定結果と、上述の特徴点の計数結果と、に基づいて、映像を評価することとした。映像の評価では、上述の3次元座標を推定できた場合に、上述の特徴点の計数値が大きくなるに従って映像の奥行感を高く評価することとした。以上によれば、上述した効果と同様の効果を奏することができる。
【0039】
(9) 本発明は、映像を評価する映像評価方法を、コンピュータに実行させるためのプログラムであって、前記映像を構成する画像ごとに、特徴点(例えば、後述の2つ以上のエッジが交差するコーナーに相当)を抽出する第1のステップ(例えば、図2のステップS1の特徴点抽出処理に相当)と、前記第1のステップにおいて抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける第2のステップ(例えば、図2のステップS2の特徴点対応処理に相当)と、前記第2のステップにおいて対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該第2のステップにおいて対応付けた各特徴点について、世界座標系で表される3次元座標を推定する第3のステップ(例えば、図2のステップS3の座標推定処理に相当)と、前記第2のステップにおいて対応付けた特徴点を計数する第4のステップ(例えば、図2のステップS4の特徴点計数処理に相当)と、前記第3のステップにおける推定結果と、前記第4のステップにおける計数結果と、に基づいて、前記映像を評価する第5のステップ(例えば、図2のステップS5の奥行感評価処理に相当)と、をコンピュータに実行させ、前記第5のステップでは、前記第3のステップにおいて3次元座標を推定できた場合に、前記第4のステップにおける計数値が大きくなるに従って前記映像の奥行感を高く評価させるためのプログラムを提案している。
【0040】
この発明によれば、プログラムをコンピュータに実行させることで、まず、映像を構成する画像ごとに特徴点を抽出し、抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けることとした。次に、対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、対応付けた各特徴点について、世界座標系で表される3次元座標を推定し、対応付けた特徴点を計数することとした。次に、上述の3次元座標の推定結果と、上述の特徴点の計数結果と、に基づいて、映像を評価することとした。映像の評価では、上述の3次元座標を推定できた場合に、上述の特徴点の計数値が大きくなるに従って映像の奥行感を高く評価することとした。以上によれば、上述した効果と同様の効果を奏することができる。
【発明の効果】
【0041】
本発明によれば、運動視差を利用した映像の奥行感を評価できる。
【図面の簡単な説明】
【0042】
【図1】本発明の第1実施形態に係る映像評価装置の構成を示すブロック図である。
【図2】前記映像評価装置のフローチャートである。
【図3】本発明の第2実施形態に係る映像評価装置の構成を示すブロック図である。
【図4】前記映像評価装置のフローチャートである。
【図5】本発明の第3実施形態に係る映像評価装置の構成を示すブロック図である。
【図6】前記映像評価装置のフローチャートである。
【図7】本発明の第4実施形態に係る映像評価装置の構成を示すブロック図である。
【図8】前記映像評価装置のフローチャートである。
【図9】本発明の第5実施形態に係る映像評価装置の構成を示すブロック図である。
【発明を実施するための形態】
【0043】
以下、本発明の実施の形態について図面を参照しながら説明する。なお、以下の実施形態における構成要素は適宜、既存の構成要素などとの置き換えが可能であり、また、他の既存の構成要素との組合せを含む様々なバリエーションが可能である。したがって、以下の実施形態の記載をもって、特許請求の範囲に記載された発明の内容を限定するものではない。
【0044】
<第1実施形態>
[映像評価装置1の構成]
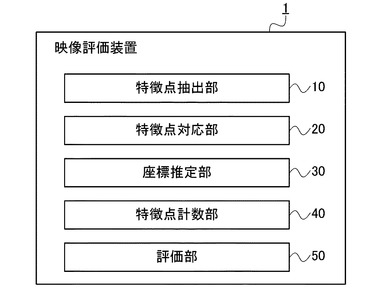
図1は、本発明の第1実施形態に係る映像評価装置1の構成を示すブロック図である。映像評価装置1は、1種類の視点で生成された映像の奥行感を評価する。この映像評価装置1は、特徴点抽出部10、特徴点対応部20、座標推定部30、特徴点計数部40、および評価部50を備える。
【0045】
特徴点抽出部10は、1種類の視点で生成された映像を構成する画像ごとに、特徴点を抽出する。この特徴点の抽出には、例えばSIFTやHarrisオペレータなどを用いることができる。なお、特徴点とは、2つ以上のエッジが交差するコーナーのことである。
【0046】
特徴点対応部20は、特徴点抽出部10により抽出された特徴点について、画像間での対応関係を求める。具体的には、特徴点抽出部10により抽出された特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける。これによれば、画像に含まれる特徴点が、画像が切り替わることによってどのように移動したのかを、認識できる。
【0047】
座標推定部30は、特徴点対応部20により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、特徴点対応部20により対応付けられた各特徴点について、世界座標系で表される3次元座標を推定する。この世界座標系で表される3次元座標の推定には、例えば、上述のバンドル調整アルゴリズムや、上述の非特許文献3に示されている因子分解法といった、反復計算アルゴリズムを用いることができる。
【0048】
なお、上述の反復計算アルゴリズムでは、反復計算が行われることになる。反復計算が収束すれば、世界座標系で表される3次元座標を推定できたことになり、反復計算が収束しなければ、世界座標系で表される3次元座標を推定できなかったことになる。ここで、反復計算が収束するとは、上述の反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下になるということ、すなわち、今回の反復計算結果と、前回の反復計算結果と、の差分の絶対値が予め定められた第1閾値以下になるということである。一方、反復計算が収束しないとは、上述の反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下にならないということ、すなわち、今回の反復計算結果と、前回の反復計算結果と、の差分の絶対値が予め定められた第1閾値以下にならないということである。
【0049】
特徴点計数部40は、特徴点対応部20により対応付けられた特徴点を計数する。計数については、例えば、特徴点対応部20により対応付けられた特徴点の数をそのまま計数する手法(以降、「第1の手法」と呼ぶこととする)を適用してもよいし、特徴点対応部20により対応付けられた特徴点の組数を計数する手法(以降、「第2の手法」と呼ぶこととする)を適用してもよい。
【0050】
ここで、仮に、特徴点抽出部10において、2つの画像からそれぞれ特徴点が5個ずつ抽出され、特徴点対応部20において、各画像にそれぞれ含まれる5個の特徴点のうち、4個ずつが対応付けられ、残りの1個ずつが対応付けられなかったものとする。この場合、第1の手法を適用すると、特徴点計数部40による計数結果は「8」となり、第2の手法を適用すると、特徴点計数部40の計数結果は「4」となる。
【0051】
評価部50は、座標推定部30による推定結果と、特徴点計数部40による計数結果と、に基づいて、映像を評価する。具体的には、座標推定部30により3次元座標を推定できた場合、すなわち座標推定部30による上述の反復計算が収束した場合、言い換えると映像に立体構造が含まれていると判定した場合には、特徴点計数部40による計数値が大きくなるに従って、映像の奥行感を高く評価する。また、座標推定部30により3次元座標を推定できなかった場合、すなわち座標推定部30による上述の反復計算が収束しなかった場合、言い換えると映像に立体構造が含まれていないと判定した場合には、特徴点計数部40による計数値によらず、映像に立体構造が含まれている場合と比べて、映像の奥行感を低く評価する。
【0052】
なお、映像の奥行感の評価には、例えば、数値を用いることができる。具体的には、例えば、評価値の最大値を「100」とし、評価値の最小値を「0」とする。そして、映像に立体構造が含まれていると判定した場合には、特徴点計数部40による計数値が大きくなるに従って、上限を「100」として評価値を大きく設定する。一方、映像に立体構造が含まれていないと判定した場合には、評価値を「0」に設定する。
【0053】
[映像評価装置1による映像評価処理]
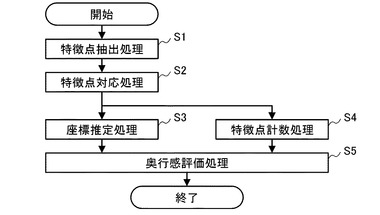
以上の映像評価装置1の動作手順について、図2を用いて以下に説明する。図2は、映像評価装置1が実行する映像評価処理のフローチャートである。
【0054】
ステップS1において、特徴点抽出部10により、特徴点抽出処理を行って、ステップS2に処理を移す。特徴点抽出処理では、映像を構成する画像ごとに特徴点を抽出する。
【0055】
ステップS2において、特徴点対応部20により、特徴点対応処理を行って、ステップS3およびステップS4に処理を移す。特徴点対応処理では、ステップS1で抽出した特徴点について、画像間での対応付けを行う。
【0056】
ステップS3では、座標推定部30により、座標推定処理を行う。座標推定処理では、ステップS2で対応付けた特徴点の対応関係と、ステップS1で抽出した各画像における特徴点の座標と、に基づいて、ステップS2で対応付けた各特徴点について、世界座標系で表される3次元座標を推定する。
【0057】
ステップS4では、特徴点計数部40により、特徴点計数処理を行う。特徴点計数処理では、ステップS2で対応付けた特徴点を計数する。
【0058】
ステップS3における座標推定処理と、ステップS4における特徴点計数処理と、を終えると、ステップS5に処理を移す。
【0059】
ステップS5において、評価部50により、奥行感評価処理を行って、映像評価処理を終了する。奥行感評価処理では、ステップS3での推定結果と、ステップS4での計数結果と、に基づいて、映像を評価する。
【0060】
以上の映像評価装置1は、以下の効果を奏することができる。
【0061】
映像評価装置1は、座標推定部30により3次元座標を推定できたか否かにより、映像に立体構造が含まれているか否かを判定する。そして、映像に立体構造が含まれている場合には、特徴点の数が多くなるに従ってこの映像に対して視聴者が得る奥行感の程度が大きくなる傾向を利用して、特徴点計数部40による特徴点の計数値が大きくなるに従って映像の奥行感を高く評価する。一方、映像に立体構造が含まれていない場合には、映像に立体構造が含まれている場合と比べて、映像の奥行感を低く評価する。以上によれば、映像の奥行感を評価できる。
【0062】
また、映像評価装置1では、映像を構成する画像が2つ以上存在すれば、特徴点対応部20により特徴点の対応関係を求めて、この特徴点の対応関係を用いて映像の奥行感を評価することができる。このため、両眼視差を利用した立体映像に限らず、運動視差を利用した立体映像についても、奥行感を評価できる。
【0063】
<第2実施形態>
[映像評価装置1Aの構成]
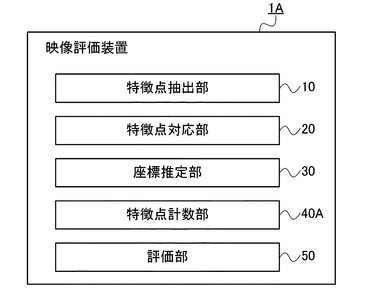
図3は、本発明の第2実施形態に係る映像評価装置1Aの構成を示すブロック図である。映像評価装置1Aは、本発明の第1実施形態に係る映像評価装置1とは、特徴点計数部40の代わりに特徴点計数部40Aを備える点が異なる。なお、映像評価装置1Aにおいて、映像評価装置1と同一構成要件については、同一符号を付し、その説明を省略する。
【0064】
特徴点計数部40Aは、特徴点対応部20により対応付けられた特徴点のうち、座標推定部30により3次元座標を推定できたものを計数する。
【0065】
[映像評価装置1Aによる映像評価処理]
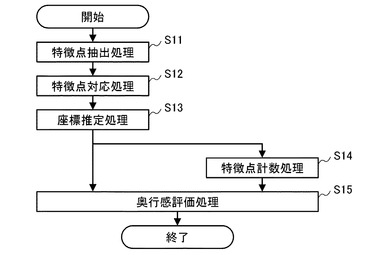
以上の映像評価装置1Aの動作手順について、図4を用いて以下に説明する。図4は、映像評価装置1Aが実行する映像評価処理のフローチャートである。
【0066】
ステップS11〜S13のそれぞれでは、図2に示したステップS1〜S3のそれぞれと同様の処理を行う。
【0067】
ステップS14において、特徴点計数部40Aにより、特徴点計数処理を行う。特徴点計数処理では、ステップS12で対応付けた特徴点のうち、ステップS13で3次元座標を推定できたものを計数する。
【0068】
ステップS13における座標推定処理と、ステップS14における特徴点計数処理と、を終えると、ステップS15に処理を移す。
【0069】
ステップS15において、評価部50により、奥行感評価処理を行って、映像評価処理を終了する。奥行感評価処理では、ステップS13での推定結果と、ステップS14での計数結果と、に基づいて、映像を評価する。
【0070】
以上の映像評価装置1Aは、映像評価装置1が奏することのできる上述の効果に加えて、以下の効果を奏することができる。
【0071】
映像評価装置1Aは、特徴点計数部40Aにより、特徴点対応部20により対応付けられた特徴点のうち、座標推定部30により3次元座標を推定できたものを計数する。このため、座標推定部30により3次元座標を推定できなかった特徴点を、評価部50による映像の奥行感の評価に反映させないようにすることができる。これによれば、映像の奥行感をより的確に評価できる場合がある。
【0072】
<第3実施形態>
[映像評価装置1Bの構成]
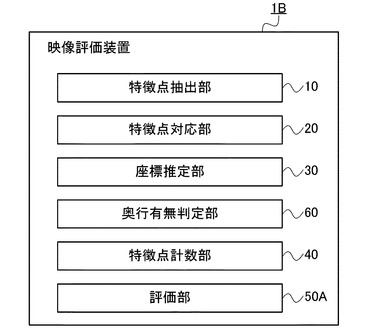
図5は、本発明の第3実施形態に係る映像評価装置1Bの構成を示すブロック図である。映像評価装置1Bは、本発明の第1実施形態に係る映像評価装置1とは、評価部50の代わりに評価部50Aを備える点と、奥行有無判定部60を備える点と、が異なる。なお、映像評価装置1Bにおいて、映像評価装置1と同一構成要件については、同一符号を付し、その説明を省略する。
【0073】
奥行有無判定部60は、映像について奥行の存在の有無を判定する。具体的には、まず、座標推定部30により推定できた各特徴点の3次元座標を世界座標系からカメラ座標系に変換する。次に、座標推定部30により3次元座標を推定できた特徴点ごとに、カメラ座標における奥行方向の座標値を求める。次に、座標推定部30により3次元座標を推定できた特徴点の中から、カメラ座標系における奥行方向の座標値の差分の絶対値が最も大きくなる2つを求め、求めた2つの特徴点を第1特徴点および第2特徴点とする。次に、第1特徴点と第2特徴点とのカメラ座標系における奥行方向の座標値の差分の絶対値について、予め定められた閾値以上である場合には、奥行が存在すると判定し、予め定められた閾値未満である場合には、奥行が存在しないと判定する。
【0074】
評価部50Aは、座標推定部30による推定結果と、特徴点計数部40による計数結果と、奥行有無判定部60による判定結果と、に基づいて、映像を評価する。具体的には、座標推定部30により3次元座標を推定でき、かつ、奥行有無判定部60により奥行が存在すると判定された場合には、特徴点計数部40による計数値が大きくなるに従って映像の奥行感を高く評価する。また、座標推定部30により3次元座標を推定できなかった場合と、奥行有無判定部60により奥行が存在しないと判定された場合とには、特徴点計数部40による計数値によらず、座標推定部30により3次元座標を推定でき、かつ、奥行有無判定部60により奥行が存在すると判定された場合と比べて、映像の奥行感を低く評価する。
【0075】
[映像評価装置1Bによる映像評価処理]
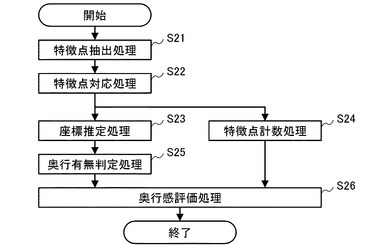
以上の映像評価装置1Bの動作手順について、図6を用いて以下に説明する。図6は、映像評価装置1Bが実行する映像評価処理のフローチャートである。
【0076】
ステップS21〜S24のそれぞれでは、図2に示したステップS1〜S4のそれぞれと同様の処理を行う。ステップS23の処理を終えると、ステップS25に処理を移す。
【0077】
ステップS25において、奥行有無判定部60により、奥行有無判定処理を行う。奥行有無判定処理では、映像について奥行の存在の有無を判定する。
【0078】
ステップS24における特徴点計数処理と、ステップS25における奥行有無判定処理と、を終えると、ステップS26に処理を移す。
【0079】
ステップS26において、評価部50Aにより、奥行感評価処理を行って、映像評価処理を終了する。奥行感評価処理では、ステップS23での推定結果と、ステップS24での計数結果と、ステップS25での判定結果と、に基づいて、映像を評価する。
【0080】
以上の映像評価装置1Bは、映像評価装置1が奏することのできる上述の効果に加えて、以下の効果を奏することができる。
【0081】
映像に立体構造が含まれていても、この映像に奥行が存在していなければ、映像の奥行感の程度が小さくなる傾向を、本発明者らは見出している。ここで、映像に奥行が存在していないとは、映像に含まれる全ての特徴点のカメラ座標系における奥行方向の座標値が、予め定められた範囲内に存在するということ、すなわちカメラ座標系における奥行方向で近い位置に、映像に含まれる全ての特徴点が存在するということである。
【0082】
映像評価装置1Bは、カメラ座標系における奥行方向で最も手前にあるものと、カメラ座標系における奥行方向で最も奥にあるものと、の奥行方向の座標値の差分の絶対値が閾値以上であれば、映像に奥行が存在すると判定する。そして、映像に立体構造が含まれており、かつ、この映像に奥行が存在している場合に、特徴点計数部40による特徴点の計数値が大きくなるに従って映像の奥行感を高く評価する。このため、映像の奥行感の評価に、映像の奥行の有無を反映させることができる。したがって、映像評価装置1と比べてより忠実に、映像の奥行感の評価に、視聴者が得る奥行感の程度を反映させることができる。
【0083】
<第4実施形態>
[映像評価装置1Cの構成]
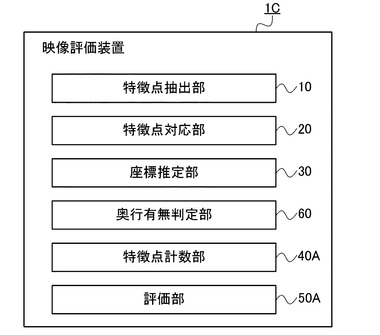
図7は、本発明の第4実施形態に係る映像評価装置1Cの構成を示すブロック図である。映像評価装置1Cは、本発明の第2実施形態に係る映像評価装置1Aとは、評価部50の代わりに本発明の第3実施形態に係る映像評価装置1Bが備える評価部50Aを備える点と、映像評価装置1Bが備える奥行有無判定部60を備える点と、が異なる。なお、映像評価装置1Cにおいて、映像評価装置1A、1Bと同一構成要件については、同一符号を付し、その説明を省略する。
【0084】
[映像評価装置1Cによる映像評価処理]
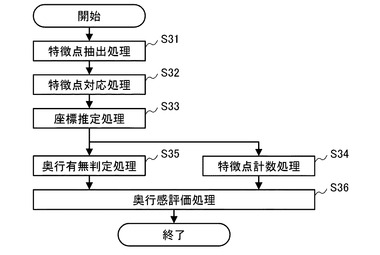
以上の映像評価装置1Cの動作手順について、図8を用いて以下に説明する。図8は、映像評価装置1Cが実行する映像評価処理のフローチャートである。
【0085】
ステップS31〜S34のそれぞれでは、図4に示したステップS11〜S14のそれぞれと同様の処理を行う。ステップS33の処理を終えると、ステップS34およびステップS35に処理を移す。
【0086】
ステップS35において、奥行有無判定部60により、奥行有無判定処理を行う。奥行有無判定処理では、映像について奥行の存在の有無を判定する。
【0087】
ステップS34における特徴点計数処理と、ステップS35における奥行有無判定処理と、を終えると、ステップS36に処理を移す。
【0088】
ステップS36において、評価部50Aにより、奥行感評価処理を行って、映像評価処理を終了する。奥行感評価処理では、ステップS33での推定結果と、ステップS34での計数結果と、ステップS35での判定結果と、に基づいて、映像を評価する。
【0089】
以上の映像評価装置1Cは、映像評価装置1A、1Bが奏することのできる上述の効果と同様の効果を奏することができる。
【0090】
<第5実施形態>
[映像評価装置1Dの構成]
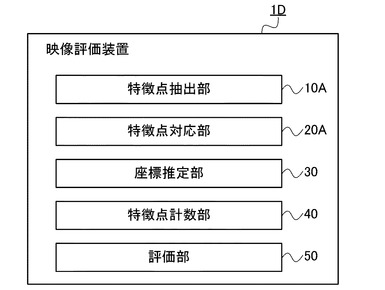
図9は、本発明の第5実施形態に係る映像評価装置1Dの構成を示すブロック図である。映像評価装置1Dは、本発明の第1実施形態に係る映像評価装置1とは、評価対象となる映像が異なる。具体的には、映像評価装置1において評価対象となる映像は、1種類の視点で生成された映像であったが、映像評価装置1Dにおいて評価対象となる映像は、2種類以上の視点で生成された多視点映像である。
【0091】
映像評価装置1Dは、映像評価装置1とは、特徴点抽出部10の代わりに特徴点抽出部10Aを備える点と、特徴点対応部20の代わりに特徴点対応部20Aを備える点と、が異なる。なお、映像評価装置1Dにおいて、映像評価装置1と同一構成要件については、同一符号を付し、その説明を省略する。
【0092】
特徴点抽出部10Aは、多視点映像について、各視点の画像ごとに、特徴点を抽出する。この特徴点の抽出には、上述の特許文献1に示されているオプティカルフローや、テンプレートマッチングなどを用いることができる。
【0093】
特徴点対応部20Aは、特徴点抽出部10Aにより抽出された特徴点について、視点間および画像間での対応関係を求める。
【0094】
画像間での対応関係を求めるとは、同一の視点における互いに異なる画像について、これら画像に含まれる特徴点であって同一の特徴点同士を対応付けるということであり、特徴点対応部20と同様の処理により実現できる。これによれば、同一の視点における画像に含まれる特徴点が、同一の視点における画像が切り替わることによってどのように移動したのかを、認識できる。
【0095】
一方、視点間での対応関係を求めるとは、互いに異なる視点における画像について、これら画像に含まれる特徴点であって同一の特徴点同士を対応付けることであり、上述のオプティカルフローやテンプレートマッチングなどにより実現できる。これによれば、各特徴点について、視点が異なることによって3次元座標がどのように異なるのかを、認識できる。
【0096】
以上の映像評価装置1Dによれば、映像評価装置1が奏することのできる上述の効果に加えて、以下の効果を奏することができる。
【0097】
映像評価装置1Dは、1種類の視点で生成された映像だけでなく、多視点映像についても、評価することができる。
【0098】
以上、この発明の実施形態につき、図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計なども含まれる。
【0099】
例えば、上述の第5実施形態に係る映像評価装置1Dは、映像評価装置1における特徴点抽出部10および特徴点対応部20を、それぞれ、特徴点抽出部10Aおよび特徴点対応部20Aに置き換えたものとしたが、これに限らない。例えば、映像評価装置1A、1B、1Cにおける特徴点抽出部10および特徴点対応部20を、それぞれ、特徴点抽出部10Aおよび特徴点対応部20Aに置き換えたものとしてもよい。
【符号の説明】
【0100】
1、1A、1B、1C、1D・・・映像評価装置
10、10A・・・特徴点抽出部
20、20A・・・特徴点対応部
30・・・座標推定部
40、40A・・・特徴点計数部
50、50A・・・評価部
60・・・奥行有無判定部
【技術分野】
【0001】
本発明は、映像評価装置、映像評価方法、およびプログラムに関する。
【背景技術】
【0002】
従来、臨場感の高い映像を撮影、配信、および閲覧する手法が提案されている。この臨場感の高い映像を用いるに際しては、臨場感の評価手法が必須となる。
【0003】
臨場感は、複数の要素によって成り立つと考えられるが、これら複数の要素のうちの1つとして、映像の奥行感を挙げることができる。そこで、映像がどの程度の奥行感を有しているのかを評価または推定する手法が必要である。また、コンテンツの作成や配信においては、客観評価方式により主観品質を推定することが求められる。
【0004】
ここで、上述の奥行感とは、奥行知覚、すなわち奥行方向の距離感を視聴者がどの程度得ることができるかということである。例えば、奥行感が無いとは、奥行方向の距離感を視聴者が得ることができないということである。なお、奥行感には、映像における奥行マップ(Depth Map)が存在するか否かは関係なく、奥行マップがあっても奥行知覚ができなければ、奥行感は無いと表現する。
【0005】
視聴者が奥行、立体、オブジェクト同士の距離関係などを感じる仕組みとしては、両眼視差、輻輳、フォーカス調整、運動視差などがある(例えば、非特許文献1参照)。
【0006】
特許文献1には、両眼視差を利用した立体映像の安全性や快適性について評価および管理する手法が示されている。この特許文献1に示されている手法では、まず、オプティカルフローを求める画像処理を用いて、左眼用画像と右眼用画像との対応点間の視差量を算出する。次に、視差量の絶対値の最大値または最小値を時系列で抽出し、評価用データとする。
【0007】
非特許文献2には、運動視差によって奥行を感じることに対応する、運動からの構造復元技術が示されている。この運動からの構造復元技術とは、特徴点位置の追跡を全画像で行い、反復計算により特徴点の位置およびカメラ位置を算出する。なお、推定の精度を向上させるため、例えばバンドル調整アルゴリズムを適用することができる。バンドル調整とは、画像からその背後にある幾何学的なモデルのパラメータを推定する方法であり、非線形最適化を数値的に実行するという特徴を有するものである。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−142819号公報
【非特許文献】
【0009】
【非特許文献1】金子、空間認識のための視覚情報処理、光学、31巻10号、771ページ、2002年
【非特許文献2】C. Tomsai and T. Kanade, "Shape and Motion from Image Streams: a Factorization Method Full Report on the Orthographic Case," International Journal of Computer Vision, Volume 9, Number 2, pp.137-154, 1992.
【非特許文献3】金谷健一、菅谷保之、因数分解法の完全レシピ、電子情報通信学会技術報告、PRMU2003−118(2003−10)、pp.19−24
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1に示されている手法は、立体映像のうち、両眼視差を利用したものを対象としている。このため、運動視差を利用した立体映像については、特許文献1に示されている手法を適用することができなかった。
【0011】
また、非特許部文献1には、視聴者が奥行等を感じる仕組みは示されている。しかしながら、これらの仕組みを用いた立体映像について奥行感を評価することは、示されていなかった。
【0012】
また、非特許文献2には、運動視差を利用した立体映像について奥行感を評価することは、示されていなかった。
【0013】
そこで、本発明は、上述の課題を鑑みてなされたものであり、運動視差を利用した立体映像の奥行感を評価できる映像評価装置、映像評価方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0014】
本発明者らは、上述の目的を達成すべく鋭意検討を行った。その結果、運動視差を利用した立体映像に、この立体映像に含まれる物体の角(コーナー)といった特徴点の空間における3次元座標が含まれている場合、すなわち立体構造が含まれている場合において、特徴点の数が多くなるに従って、この立体映像に対して視聴者が得る奥行感の程度が大きくなる傾向を見出し、本発明を完成させるに至った。
【0015】
(1) 本発明は、映像を評価する映像評価装置(例えば、図1の映像評価装置1に相当)であって、前記映像を構成する画像ごとに、特徴点(例えば、後述の2つ以上のエッジが交差するコーナーに相当)を抽出する特徴点抽出手段(例えば、図1の特徴点抽出部10に相当)と、前記特徴点抽出手段により抽出された特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける特徴点対応手段(例えば、図1の特徴点対応部20に相当)と、前記特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該特徴点対応手段により対応付けられた各特徴点について、世界座標系で表される3次元座標を推定する座標推定手段(例えば、図1の座標推定部30に相当)と、前記特徴点対応手段により対応付けられた特徴点を計数する特徴点計数手段(例えば、図1の特徴点計数部40に相当)と、前記座標推定手段による推定結果と、前記特徴点計数手段による計数結果と、に基づいて、前記映像を評価する評価手段(例えば、図1の評価部50に相当)と、を備え、前記評価手段は、前記座標推定手段により3次元座標を推定できた場合に、前記特徴点計数手段による計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価装置を提案している。
【0016】
この発明によれば、映像を評価する映像評価装置に、特徴点抽出手段、特徴点対応手段、座標推定手段、特徴点計数手段、および評価手段を設けた。そして、特徴点抽出手段により、映像を構成する画像ごとに特徴点を抽出し、特徴点対応手段により、特徴点抽出手段により抽出された特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付けることとした。また、座標推定手段により、特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、特徴点対応手段により対応付けられた各特徴点について、世界座標系で表される3次元座標を推定することとした。また、特徴点計数手段により、特徴点対応手段により対応付けられた特徴点を計数し、評価手段により、座標推定手段による推定結果と、特徴点計数手段による計数結果と、に基づいて、映像を評価することとした。評価手段による映像の評価については、座標推定手段により3次元座標を推定できた場合に、特徴点計数手段による計数値が大きくなるに従って映像の奥行感を高く評価することとした。
【0017】
このため、(1)の映像評価装置は、座標推定手段により3次元座標を推定できたか否かにより、映像に立体構造が含まれているか否かを判定できる。そして、映像に立体構造が含まれている場合には、特徴点の数が多くなるに従ってこの映像に対して視聴者が得る奥行感の程度が大きくなる傾向を利用して、特徴点の数が多くなるに従って映像の奥行感を高く評価することができる。一方、映像に立体構造が含まれていない場合には、映像に立体構造が含まれている場合と比べて、映像の奥行感を低く評価することができる。以上によれば、映像の奥行感を評価できる。
【0018】
また、(1)の映像評価装置では、映像を構成する画像が2つ以上存在すれば、特徴点対応手段により特徴点の対応関係を求めて、この特徴点の対応関係を用いて映像の奥行感を評価することができる。このため、両眼視差を利用した立体映像に限らず、運動視差を利用した立体映像についても、奥行感を評価できる。
【0019】
(2) 本発明は、(1)の映像評価装置について、前記映像について奥行の有無を判定する奥行有無判定手段(例えば、図5の奥行有無判定部60に相当)を備え、前記奥行有無判定手段は、前記座標推定手段により推定できた各特徴点の3次元座標を世界座標系からカメラ座標系に変換し、前記座標推定手段により3次元座標を推定できた特徴点ごとに、前記カメラ座標系における奥行方向の座標値を求め、前記座標推定手段により3次元座標を推定できた特徴点の中から、前記奥行方向の座標値の差分の絶対値が最も大きくなる2つを求め、前記2つの特徴点の前記奥行方向の座標値の差分の絶対値が予め定められた閾値以上であれば、奥行が存在すると判定し、前記評価手段は、前記座標推定手段により3次元座標を推定でき、かつ、前記奥行有無判定手段により奥行が存在すると判定された場合には、前記特徴点計数手段による計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価装置を提案している。
【0020】
ここで、(1)の映像評価装置において、座標推定手段により3次元座標を推定できたとしても、3次元座標を推定できた複数の特徴点のカメラ座標系における奥行方向の座標値が略等しければ、視聴者が得る奥行感の程度は小さくなってしまう。
【0021】
そこで、この発明によれば、(1)の映像評価装置に、映像について奥行の有無を判定する奥行有無判定手段を設けた。そして、奥行有無判定手段により、座標推定手段により推定できた各特徴点の3次元座標を世界座標系からカメラ座標系に変換し、座標推定手段により3次元座標を推定できた特徴点ごとに、カメラ座標系における奥行方向の座標値を求め、座標推定手段により3次元座標を推定できた特徴点の中から、奥行方向の座標値の差分の絶対値が最も大きくなる2つを求め、2つの特徴点の奥行方向の座標値の差分の絶対値が予め定められた閾値以上であれば、奥行が存在すると判定することとした。また、評価手段により、座標推定手段により3次元座標を推定でき、かつ、奥行有無判定手段により奥行が存在すると判定された場合に、特徴点計数手段による計数値が大きくなるに従って映像の奥行感を高く評価することとした。
【0022】
このため、(2)の映像評価装置は、3次元座標を推定できた複数の特徴点のカメラ座標系における奥行方向の座標値が予め定められた閾値以上であれば、奥行が存在すると判定し、映像の奥行感の評価に、この奥行の存在の有無を反映させることができる。したがって、映像の奥行感の評価に、視聴者が得る奥行感の程度をより忠実に反映させることができる。
【0023】
(3) 本発明は、(1)または(2)の映像評価装置について、前記特徴点は、2つ以上のエッジが交差するコーナーであることを特徴とする映像評価装置を提案している。
【0024】
この発明によれば、(1)または(2)の映像評価装置において、特徴点とは、2つ以上のエッジが交差するコーナーのこととした。このため、(3)の映像評価装置は、特徴点としてコーナーを用いて、上述した効果と同様の効果を奏することができる。
【0025】
(4) 本発明は、(1)〜(3)のいずれかの映像評価装置について、前記座標推定手段は、前記特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて反復計算アルゴリズムによる反復計算を行い、前記反復計算が収束すれば、前記世界座標系で表される3次元座標を推定できたものとし、前記反復計算が収束しなければ、前記世界座標系で表される3次元座標を推定できなかったものとすることを特徴とする映像評価装置を提案している。
【0026】
この発明によれば、(1)〜(3)のいずれかの映像評価装置において、座標推定手段により、特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて反復計算アルゴリズムによる反復計算を行い、反復計算が収束すれば、世界座標系で表される3次元座標を推定できたものとし、反復計算が収束しなければ、世界座標系で表される3次元座標を推定できなかったものとすることとした。
【0027】
このため、(4)の映像評価装置は、反復計算アルゴリズムを用いて、3次元座標を推定できたか否かを判定することができる。
【0028】
(5) 本発明は、(4)の映像評価装置について、前記座標推定手段は、前記反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下になれば、前記反復計算が収束したものとし、前記反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が前記第1閾値以下にならなければ、前記反復計算が収束しなかったものとすることを特徴とする映像評価装置を提案している。
【0029】
この発明によれば、(4)の映像評価装置において、座標推定手段により、反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下になれば、反復計算が収束したものとし、反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下にならなければ、反復計算が収束しなかったものとすることとした。
【0030】
このため、(5)の映像評価装置は、反復計算が収束したか否かを、前回の反復計算からの反復計算結果の変化が第1閾値以下であるか否かにより、判定できる。
【0031】
(6) 本発明は、(1)〜(5)のいずれかの映像評価装置について、前記特徴点計数手段は、前記特徴点対応手段により対応付けられた特徴点のうち、前記座標推定手段により3次元座標を推定できたものを計数することを特徴とする映像評価装置を提案している。
【0032】
この発明によれば、特徴点計数手段により、特徴点対応手段により対応付けられた特徴点のうち、座標推定手段により3次元座標を推定できたものを計数することとした。
【0033】
このため、座標推定手段により3次元座標を推定できなかった特徴点を、評価手段による映像の奥行感の評価に反映させないようにすることができる。これによれば、映像の奥行感をより的確に評価できる場合がある。
【0034】
(7) 本発明は、(1)〜(6)のいずれかの映像評価装置について、前記映像は、多視点映像であり、前記特徴点抽出手段は、前記多視点映像について、各視点の画像ごとに、特徴点を抽出し、前記特徴点対応手段は、前記特徴点抽出手段により抽出された特徴点のうち、同一の視点における互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けるとともに、前記特徴点抽出手段により抽出された特徴点のうち、互いに異なる視点における画像に含まれる特徴点であって同一の特徴点同士を対応付けることを特徴とする映像評価装置を提案している。
【0035】
この発明によれば、(1)〜(6)のいずれかの映像評価装置において、特徴点抽出手段により、多視点映像である映像について、各視点の画像ごとに、特徴点を抽出することとした。また、特徴点対応手段により、特徴点抽出手段により抽出された特徴点のうち、同一の視点における互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けるとともに、特徴点抽出手段により抽出された特徴点のうち、互いに異なる視点における画像に含まれる特徴点であって同一の特徴点同士を対応付けることとした。
【0036】
このため、(7)の映像評価装置は、多視点映像について、奥行感を評価できる。
【0037】
(8) 本発明は、映像を評価する映像評価方法であって、前記映像を構成する画像ごとに、特徴点(例えば、後述の2つ以上のエッジが交差するコーナーに相当)を抽出する第1のステップ(例えば、図2のステップS1の特徴点抽出処理に相当)と、前記第1のステップにおいて抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける第2のステップ(例えば、図2のステップS2の特徴点対応処理に相当)と、前記第2のステップにおいて対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該第2のステップにおいて対応付けた各特徴点について、世界座標系で表される3次元座標を推定する第3のステップ(例えば、図2のステップS3の座標推定処理に相当)と、前記第2のステップにおいて対応付けた特徴点を計数する第4のステップ(例えば、図2のステップS4の特徴点計数処理に相当)と、前記第3のステップにおける推定結果と、前記第4のステップにおける計数結果と、に基づいて、前記映像を評価する第5のステップ(例えば、図2のステップS5の奥行感評価処理に相当)と、を備え、前記第5のステップでは、前記第3のステップにおいて3次元座標を推定できた場合に、前記第4のステップにおける計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価方法を提案している。
【0038】
この発明によれば、まず、映像を構成する画像ごとに特徴点を抽出し、抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けることとした。次に、対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、対応付けた各特徴点について、世界座標系で表される3次元座標を推定し、対応付けた特徴点を計数することとした。次に、上述の3次元座標の推定結果と、上述の特徴点の計数結果と、に基づいて、映像を評価することとした。映像の評価では、上述の3次元座標を推定できた場合に、上述の特徴点の計数値が大きくなるに従って映像の奥行感を高く評価することとした。以上によれば、上述した効果と同様の効果を奏することができる。
【0039】
(9) 本発明は、映像を評価する映像評価方法を、コンピュータに実行させるためのプログラムであって、前記映像を構成する画像ごとに、特徴点(例えば、後述の2つ以上のエッジが交差するコーナーに相当)を抽出する第1のステップ(例えば、図2のステップS1の特徴点抽出処理に相当)と、前記第1のステップにおいて抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける第2のステップ(例えば、図2のステップS2の特徴点対応処理に相当)と、前記第2のステップにおいて対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該第2のステップにおいて対応付けた各特徴点について、世界座標系で表される3次元座標を推定する第3のステップ(例えば、図2のステップS3の座標推定処理に相当)と、前記第2のステップにおいて対応付けた特徴点を計数する第4のステップ(例えば、図2のステップS4の特徴点計数処理に相当)と、前記第3のステップにおける推定結果と、前記第4のステップにおける計数結果と、に基づいて、前記映像を評価する第5のステップ(例えば、図2のステップS5の奥行感評価処理に相当)と、をコンピュータに実行させ、前記第5のステップでは、前記第3のステップにおいて3次元座標を推定できた場合に、前記第4のステップにおける計数値が大きくなるに従って前記映像の奥行感を高く評価させるためのプログラムを提案している。
【0040】
この発明によれば、プログラムをコンピュータに実行させることで、まず、映像を構成する画像ごとに特徴点を抽出し、抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けることとした。次に、対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、対応付けた各特徴点について、世界座標系で表される3次元座標を推定し、対応付けた特徴点を計数することとした。次に、上述の3次元座標の推定結果と、上述の特徴点の計数結果と、に基づいて、映像を評価することとした。映像の評価では、上述の3次元座標を推定できた場合に、上述の特徴点の計数値が大きくなるに従って映像の奥行感を高く評価することとした。以上によれば、上述した効果と同様の効果を奏することができる。
【発明の効果】
【0041】
本発明によれば、運動視差を利用した映像の奥行感を評価できる。
【図面の簡単な説明】
【0042】
【図1】本発明の第1実施形態に係る映像評価装置の構成を示すブロック図である。
【図2】前記映像評価装置のフローチャートである。
【図3】本発明の第2実施形態に係る映像評価装置の構成を示すブロック図である。
【図4】前記映像評価装置のフローチャートである。
【図5】本発明の第3実施形態に係る映像評価装置の構成を示すブロック図である。
【図6】前記映像評価装置のフローチャートである。
【図7】本発明の第4実施形態に係る映像評価装置の構成を示すブロック図である。
【図8】前記映像評価装置のフローチャートである。
【図9】本発明の第5実施形態に係る映像評価装置の構成を示すブロック図である。
【発明を実施するための形態】
【0043】
以下、本発明の実施の形態について図面を参照しながら説明する。なお、以下の実施形態における構成要素は適宜、既存の構成要素などとの置き換えが可能であり、また、他の既存の構成要素との組合せを含む様々なバリエーションが可能である。したがって、以下の実施形態の記載をもって、特許請求の範囲に記載された発明の内容を限定するものではない。
【0044】
<第1実施形態>
[映像評価装置1の構成]
図1は、本発明の第1実施形態に係る映像評価装置1の構成を示すブロック図である。映像評価装置1は、1種類の視点で生成された映像の奥行感を評価する。この映像評価装置1は、特徴点抽出部10、特徴点対応部20、座標推定部30、特徴点計数部40、および評価部50を備える。
【0045】
特徴点抽出部10は、1種類の視点で生成された映像を構成する画像ごとに、特徴点を抽出する。この特徴点の抽出には、例えばSIFTやHarrisオペレータなどを用いることができる。なお、特徴点とは、2つ以上のエッジが交差するコーナーのことである。
【0046】
特徴点対応部20は、特徴点抽出部10により抽出された特徴点について、画像間での対応関係を求める。具体的には、特徴点抽出部10により抽出された特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける。これによれば、画像に含まれる特徴点が、画像が切り替わることによってどのように移動したのかを、認識できる。
【0047】
座標推定部30は、特徴点対応部20により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、特徴点対応部20により対応付けられた各特徴点について、世界座標系で表される3次元座標を推定する。この世界座標系で表される3次元座標の推定には、例えば、上述のバンドル調整アルゴリズムや、上述の非特許文献3に示されている因子分解法といった、反復計算アルゴリズムを用いることができる。
【0048】
なお、上述の反復計算アルゴリズムでは、反復計算が行われることになる。反復計算が収束すれば、世界座標系で表される3次元座標を推定できたことになり、反復計算が収束しなければ、世界座標系で表される3次元座標を推定できなかったことになる。ここで、反復計算が収束するとは、上述の反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下になるということ、すなわち、今回の反復計算結果と、前回の反復計算結果と、の差分の絶対値が予め定められた第1閾値以下になるということである。一方、反復計算が収束しないとは、上述の反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下にならないということ、すなわち、今回の反復計算結果と、前回の反復計算結果と、の差分の絶対値が予め定められた第1閾値以下にならないということである。
【0049】
特徴点計数部40は、特徴点対応部20により対応付けられた特徴点を計数する。計数については、例えば、特徴点対応部20により対応付けられた特徴点の数をそのまま計数する手法(以降、「第1の手法」と呼ぶこととする)を適用してもよいし、特徴点対応部20により対応付けられた特徴点の組数を計数する手法(以降、「第2の手法」と呼ぶこととする)を適用してもよい。
【0050】
ここで、仮に、特徴点抽出部10において、2つの画像からそれぞれ特徴点が5個ずつ抽出され、特徴点対応部20において、各画像にそれぞれ含まれる5個の特徴点のうち、4個ずつが対応付けられ、残りの1個ずつが対応付けられなかったものとする。この場合、第1の手法を適用すると、特徴点計数部40による計数結果は「8」となり、第2の手法を適用すると、特徴点計数部40の計数結果は「4」となる。
【0051】
評価部50は、座標推定部30による推定結果と、特徴点計数部40による計数結果と、に基づいて、映像を評価する。具体的には、座標推定部30により3次元座標を推定できた場合、すなわち座標推定部30による上述の反復計算が収束した場合、言い換えると映像に立体構造が含まれていると判定した場合には、特徴点計数部40による計数値が大きくなるに従って、映像の奥行感を高く評価する。また、座標推定部30により3次元座標を推定できなかった場合、すなわち座標推定部30による上述の反復計算が収束しなかった場合、言い換えると映像に立体構造が含まれていないと判定した場合には、特徴点計数部40による計数値によらず、映像に立体構造が含まれている場合と比べて、映像の奥行感を低く評価する。
【0052】
なお、映像の奥行感の評価には、例えば、数値を用いることができる。具体的には、例えば、評価値の最大値を「100」とし、評価値の最小値を「0」とする。そして、映像に立体構造が含まれていると判定した場合には、特徴点計数部40による計数値が大きくなるに従って、上限を「100」として評価値を大きく設定する。一方、映像に立体構造が含まれていないと判定した場合には、評価値を「0」に設定する。
【0053】
[映像評価装置1による映像評価処理]
以上の映像評価装置1の動作手順について、図2を用いて以下に説明する。図2は、映像評価装置1が実行する映像評価処理のフローチャートである。
【0054】
ステップS1において、特徴点抽出部10により、特徴点抽出処理を行って、ステップS2に処理を移す。特徴点抽出処理では、映像を構成する画像ごとに特徴点を抽出する。
【0055】
ステップS2において、特徴点対応部20により、特徴点対応処理を行って、ステップS3およびステップS4に処理を移す。特徴点対応処理では、ステップS1で抽出した特徴点について、画像間での対応付けを行う。
【0056】
ステップS3では、座標推定部30により、座標推定処理を行う。座標推定処理では、ステップS2で対応付けた特徴点の対応関係と、ステップS1で抽出した各画像における特徴点の座標と、に基づいて、ステップS2で対応付けた各特徴点について、世界座標系で表される3次元座標を推定する。
【0057】
ステップS4では、特徴点計数部40により、特徴点計数処理を行う。特徴点計数処理では、ステップS2で対応付けた特徴点を計数する。
【0058】
ステップS3における座標推定処理と、ステップS4における特徴点計数処理と、を終えると、ステップS5に処理を移す。
【0059】
ステップS5において、評価部50により、奥行感評価処理を行って、映像評価処理を終了する。奥行感評価処理では、ステップS3での推定結果と、ステップS4での計数結果と、に基づいて、映像を評価する。
【0060】
以上の映像評価装置1は、以下の効果を奏することができる。
【0061】
映像評価装置1は、座標推定部30により3次元座標を推定できたか否かにより、映像に立体構造が含まれているか否かを判定する。そして、映像に立体構造が含まれている場合には、特徴点の数が多くなるに従ってこの映像に対して視聴者が得る奥行感の程度が大きくなる傾向を利用して、特徴点計数部40による特徴点の計数値が大きくなるに従って映像の奥行感を高く評価する。一方、映像に立体構造が含まれていない場合には、映像に立体構造が含まれている場合と比べて、映像の奥行感を低く評価する。以上によれば、映像の奥行感を評価できる。
【0062】
また、映像評価装置1では、映像を構成する画像が2つ以上存在すれば、特徴点対応部20により特徴点の対応関係を求めて、この特徴点の対応関係を用いて映像の奥行感を評価することができる。このため、両眼視差を利用した立体映像に限らず、運動視差を利用した立体映像についても、奥行感を評価できる。
【0063】
<第2実施形態>
[映像評価装置1Aの構成]
図3は、本発明の第2実施形態に係る映像評価装置1Aの構成を示すブロック図である。映像評価装置1Aは、本発明の第1実施形態に係る映像評価装置1とは、特徴点計数部40の代わりに特徴点計数部40Aを備える点が異なる。なお、映像評価装置1Aにおいて、映像評価装置1と同一構成要件については、同一符号を付し、その説明を省略する。
【0064】
特徴点計数部40Aは、特徴点対応部20により対応付けられた特徴点のうち、座標推定部30により3次元座標を推定できたものを計数する。
【0065】
[映像評価装置1Aによる映像評価処理]
以上の映像評価装置1Aの動作手順について、図4を用いて以下に説明する。図4は、映像評価装置1Aが実行する映像評価処理のフローチャートである。
【0066】
ステップS11〜S13のそれぞれでは、図2に示したステップS1〜S3のそれぞれと同様の処理を行う。
【0067】
ステップS14において、特徴点計数部40Aにより、特徴点計数処理を行う。特徴点計数処理では、ステップS12で対応付けた特徴点のうち、ステップS13で3次元座標を推定できたものを計数する。
【0068】
ステップS13における座標推定処理と、ステップS14における特徴点計数処理と、を終えると、ステップS15に処理を移す。
【0069】
ステップS15において、評価部50により、奥行感評価処理を行って、映像評価処理を終了する。奥行感評価処理では、ステップS13での推定結果と、ステップS14での計数結果と、に基づいて、映像を評価する。
【0070】
以上の映像評価装置1Aは、映像評価装置1が奏することのできる上述の効果に加えて、以下の効果を奏することができる。
【0071】
映像評価装置1Aは、特徴点計数部40Aにより、特徴点対応部20により対応付けられた特徴点のうち、座標推定部30により3次元座標を推定できたものを計数する。このため、座標推定部30により3次元座標を推定できなかった特徴点を、評価部50による映像の奥行感の評価に反映させないようにすることができる。これによれば、映像の奥行感をより的確に評価できる場合がある。
【0072】
<第3実施形態>
[映像評価装置1Bの構成]
図5は、本発明の第3実施形態に係る映像評価装置1Bの構成を示すブロック図である。映像評価装置1Bは、本発明の第1実施形態に係る映像評価装置1とは、評価部50の代わりに評価部50Aを備える点と、奥行有無判定部60を備える点と、が異なる。なお、映像評価装置1Bにおいて、映像評価装置1と同一構成要件については、同一符号を付し、その説明を省略する。
【0073】
奥行有無判定部60は、映像について奥行の存在の有無を判定する。具体的には、まず、座標推定部30により推定できた各特徴点の3次元座標を世界座標系からカメラ座標系に変換する。次に、座標推定部30により3次元座標を推定できた特徴点ごとに、カメラ座標における奥行方向の座標値を求める。次に、座標推定部30により3次元座標を推定できた特徴点の中から、カメラ座標系における奥行方向の座標値の差分の絶対値が最も大きくなる2つを求め、求めた2つの特徴点を第1特徴点および第2特徴点とする。次に、第1特徴点と第2特徴点とのカメラ座標系における奥行方向の座標値の差分の絶対値について、予め定められた閾値以上である場合には、奥行が存在すると判定し、予め定められた閾値未満である場合には、奥行が存在しないと判定する。
【0074】
評価部50Aは、座標推定部30による推定結果と、特徴点計数部40による計数結果と、奥行有無判定部60による判定結果と、に基づいて、映像を評価する。具体的には、座標推定部30により3次元座標を推定でき、かつ、奥行有無判定部60により奥行が存在すると判定された場合には、特徴点計数部40による計数値が大きくなるに従って映像の奥行感を高く評価する。また、座標推定部30により3次元座標を推定できなかった場合と、奥行有無判定部60により奥行が存在しないと判定された場合とには、特徴点計数部40による計数値によらず、座標推定部30により3次元座標を推定でき、かつ、奥行有無判定部60により奥行が存在すると判定された場合と比べて、映像の奥行感を低く評価する。
【0075】
[映像評価装置1Bによる映像評価処理]
以上の映像評価装置1Bの動作手順について、図6を用いて以下に説明する。図6は、映像評価装置1Bが実行する映像評価処理のフローチャートである。
【0076】
ステップS21〜S24のそれぞれでは、図2に示したステップS1〜S4のそれぞれと同様の処理を行う。ステップS23の処理を終えると、ステップS25に処理を移す。
【0077】
ステップS25において、奥行有無判定部60により、奥行有無判定処理を行う。奥行有無判定処理では、映像について奥行の存在の有無を判定する。
【0078】
ステップS24における特徴点計数処理と、ステップS25における奥行有無判定処理と、を終えると、ステップS26に処理を移す。
【0079】
ステップS26において、評価部50Aにより、奥行感評価処理を行って、映像評価処理を終了する。奥行感評価処理では、ステップS23での推定結果と、ステップS24での計数結果と、ステップS25での判定結果と、に基づいて、映像を評価する。
【0080】
以上の映像評価装置1Bは、映像評価装置1が奏することのできる上述の効果に加えて、以下の効果を奏することができる。
【0081】
映像に立体構造が含まれていても、この映像に奥行が存在していなければ、映像の奥行感の程度が小さくなる傾向を、本発明者らは見出している。ここで、映像に奥行が存在していないとは、映像に含まれる全ての特徴点のカメラ座標系における奥行方向の座標値が、予め定められた範囲内に存在するということ、すなわちカメラ座標系における奥行方向で近い位置に、映像に含まれる全ての特徴点が存在するということである。
【0082】
映像評価装置1Bは、カメラ座標系における奥行方向で最も手前にあるものと、カメラ座標系における奥行方向で最も奥にあるものと、の奥行方向の座標値の差分の絶対値が閾値以上であれば、映像に奥行が存在すると判定する。そして、映像に立体構造が含まれており、かつ、この映像に奥行が存在している場合に、特徴点計数部40による特徴点の計数値が大きくなるに従って映像の奥行感を高く評価する。このため、映像の奥行感の評価に、映像の奥行の有無を反映させることができる。したがって、映像評価装置1と比べてより忠実に、映像の奥行感の評価に、視聴者が得る奥行感の程度を反映させることができる。
【0083】
<第4実施形態>
[映像評価装置1Cの構成]
図7は、本発明の第4実施形態に係る映像評価装置1Cの構成を示すブロック図である。映像評価装置1Cは、本発明の第2実施形態に係る映像評価装置1Aとは、評価部50の代わりに本発明の第3実施形態に係る映像評価装置1Bが備える評価部50Aを備える点と、映像評価装置1Bが備える奥行有無判定部60を備える点と、が異なる。なお、映像評価装置1Cにおいて、映像評価装置1A、1Bと同一構成要件については、同一符号を付し、その説明を省略する。
【0084】
[映像評価装置1Cによる映像評価処理]
以上の映像評価装置1Cの動作手順について、図8を用いて以下に説明する。図8は、映像評価装置1Cが実行する映像評価処理のフローチャートである。
【0085】
ステップS31〜S34のそれぞれでは、図4に示したステップS11〜S14のそれぞれと同様の処理を行う。ステップS33の処理を終えると、ステップS34およびステップS35に処理を移す。
【0086】
ステップS35において、奥行有無判定部60により、奥行有無判定処理を行う。奥行有無判定処理では、映像について奥行の存在の有無を判定する。
【0087】
ステップS34における特徴点計数処理と、ステップS35における奥行有無判定処理と、を終えると、ステップS36に処理を移す。
【0088】
ステップS36において、評価部50Aにより、奥行感評価処理を行って、映像評価処理を終了する。奥行感評価処理では、ステップS33での推定結果と、ステップS34での計数結果と、ステップS35での判定結果と、に基づいて、映像を評価する。
【0089】
以上の映像評価装置1Cは、映像評価装置1A、1Bが奏することのできる上述の効果と同様の効果を奏することができる。
【0090】
<第5実施形態>
[映像評価装置1Dの構成]
図9は、本発明の第5実施形態に係る映像評価装置1Dの構成を示すブロック図である。映像評価装置1Dは、本発明の第1実施形態に係る映像評価装置1とは、評価対象となる映像が異なる。具体的には、映像評価装置1において評価対象となる映像は、1種類の視点で生成された映像であったが、映像評価装置1Dにおいて評価対象となる映像は、2種類以上の視点で生成された多視点映像である。
【0091】
映像評価装置1Dは、映像評価装置1とは、特徴点抽出部10の代わりに特徴点抽出部10Aを備える点と、特徴点対応部20の代わりに特徴点対応部20Aを備える点と、が異なる。なお、映像評価装置1Dにおいて、映像評価装置1と同一構成要件については、同一符号を付し、その説明を省略する。
【0092】
特徴点抽出部10Aは、多視点映像について、各視点の画像ごとに、特徴点を抽出する。この特徴点の抽出には、上述の特許文献1に示されているオプティカルフローや、テンプレートマッチングなどを用いることができる。
【0093】
特徴点対応部20Aは、特徴点抽出部10Aにより抽出された特徴点について、視点間および画像間での対応関係を求める。
【0094】
画像間での対応関係を求めるとは、同一の視点における互いに異なる画像について、これら画像に含まれる特徴点であって同一の特徴点同士を対応付けるということであり、特徴点対応部20と同様の処理により実現できる。これによれば、同一の視点における画像に含まれる特徴点が、同一の視点における画像が切り替わることによってどのように移動したのかを、認識できる。
【0095】
一方、視点間での対応関係を求めるとは、互いに異なる視点における画像について、これら画像に含まれる特徴点であって同一の特徴点同士を対応付けることであり、上述のオプティカルフローやテンプレートマッチングなどにより実現できる。これによれば、各特徴点について、視点が異なることによって3次元座標がどのように異なるのかを、認識できる。
【0096】
以上の映像評価装置1Dによれば、映像評価装置1が奏することのできる上述の効果に加えて、以下の効果を奏することができる。
【0097】
映像評価装置1Dは、1種類の視点で生成された映像だけでなく、多視点映像についても、評価することができる。
【0098】
以上、この発明の実施形態につき、図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計なども含まれる。
【0099】
例えば、上述の第5実施形態に係る映像評価装置1Dは、映像評価装置1における特徴点抽出部10および特徴点対応部20を、それぞれ、特徴点抽出部10Aおよび特徴点対応部20Aに置き換えたものとしたが、これに限らない。例えば、映像評価装置1A、1B、1Cにおける特徴点抽出部10および特徴点対応部20を、それぞれ、特徴点抽出部10Aおよび特徴点対応部20Aに置き換えたものとしてもよい。
【符号の説明】
【0100】
1、1A、1B、1C、1D・・・映像評価装置
10、10A・・・特徴点抽出部
20、20A・・・特徴点対応部
30・・・座標推定部
40、40A・・・特徴点計数部
50、50A・・・評価部
60・・・奥行有無判定部
【特許請求の範囲】
【請求項1】
映像を評価する映像評価装置であって、
前記映像を構成する画像ごとに、特徴点を抽出する特徴点抽出手段と、
前記特徴点抽出手段により抽出された特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける特徴点対応手段と、
前記特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該特徴点対応手段により対応付けられた各特徴点について、世界座標系で表される3次元座標を推定する座標推定手段と、
前記特徴点対応手段により対応付けられた特徴点を計数する特徴点計数手段と、
前記座標推定手段による推定結果と、前記特徴点計数手段による計数結果と、に基づいて、前記映像を評価する評価手段と、を備え、
前記評価手段は、前記座標推定手段により3次元座標を推定できた場合に、前記特徴点計数手段による計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価装置。
【請求項2】
前記映像について奥行の有無を判定する奥行有無判定手段を備え、
前記奥行有無判定手段は、
前記座標推定手段により推定できた各特徴点の3次元座標を世界座標系からカメラ座標系に変換し、
前記座標推定手段により3次元座標を推定できた特徴点ごとに、前記カメラ座標系における奥行方向の座標値を求め、
前記座標推定手段により3次元座標を推定できた特徴点の中から、前記奥行方向の座標値の差分の絶対値が最も大きくなる2つを求め、
前記2つの特徴点の前記奥行方向の座標値の差分の絶対値が予め定められた閾値以上であれば、奥行が存在すると判定し、
前記評価手段は、前記座標推定手段により3次元座標を推定でき、かつ、前記奥行有無判定手段により奥行が存在すると判定された場合に、前記特徴点計数手段による計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする請求項1に記載の映像評価装置。
【請求項3】
前記特徴点は、2つ以上のエッジが交差するコーナーであることを特徴とする請求項1または2に記載の映像評価装置。
【請求項4】
前記座標推定手段は、
前記特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて反復計算アルゴリズムによる反復計算を行い、
前記反復計算が収束すれば、前記世界座標系で表される3次元座標を推定できたものとし、
前記反復計算が収束しなければ、前記世界座標系で表される3次元座標を推定できなかったものとすることを特徴とする請求項1から3のいずれかに記載の映像評価装置。
【請求項5】
前記座標推定手段は、
前記反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下になれば、前記反復計算が収束したものとし、
前記反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が前記第1閾値以下にならなければ、前記反復計算が収束しなかったものとすることを特徴とする請求項4に記載の映像評価装置。
【請求項6】
前記特徴点計数手段は、前記特徴点対応手段により対応付けられた特徴点のうち、前記座標推定手段により3次元座標を推定できたものを計数することを特徴とする請求項1から5のいずれかに記載の映像評価装置。
【請求項7】
前記映像は、多視点映像であり、
前記特徴点抽出手段は、前記多視点映像について、各視点の画像ごとに、特徴点を抽出し、
前記特徴点対応手段は、
前記特徴点抽出手段により抽出された特徴点のうち、同一の視点における互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けるとともに、
前記特徴点抽出手段により抽出された特徴点のうち、互いに異なる視点における画像に含まれる特徴点であって同一の特徴点同士を対応付けることを特徴とする請求項1から6のいずれかに記載の映像評価装置。
【請求項8】
映像を評価する映像評価方法であって、
前記映像を構成する画像ごとに、特徴点を抽出する第1のステップと、
前記第1のステップにおいて抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける第2のステップと、
前記第2のステップにおいて対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該第2のステップにおいて対応付けた各特徴点について、世界座標系で表される3次元座標を推定する第3のステップと、
前記第2のステップにおいて対応付けた特徴点を計数する第4のステップと、
前記第3のステップにおける推定結果と、前記第4のステップにおける計数結果と、に基づいて、前記映像を評価する第5のステップと、を備え、
前記第5のステップでは、前記第3のステップにおいて3次元座標を推定できた場合に、前記第4のステップにおける計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価方法。
【請求項9】
映像を評価する映像評価方法を、コンピュータに実行させるためのプログラムであって、
前記映像を構成する画像ごとに、特徴点を抽出する第1のステップと、
前記第1のステップにおいて抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける第2のステップと、
前記第2のステップにおいて対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該第2のステップにおいて対応付けた各特徴点について、世界座標系で表される3次元座標を推定する第3のステップと、
前記第2のステップにおいて対応付けた特徴点を計数する第4のステップと、
前記第3のステップにおける推定結果と、前記第4のステップにおける計数結果と、に基づいて、前記映像を評価する第5のステップと、をコンピュータに実行させ、
前記第5のステップでは、前記第3のステップにおいて3次元座標を推定できた場合に、前記第4のステップにおける計数値が大きくなるに従って前記映像の奥行感を高く評価させるためのプログラム。
【請求項1】
映像を評価する映像評価装置であって、
前記映像を構成する画像ごとに、特徴点を抽出する特徴点抽出手段と、
前記特徴点抽出手段により抽出された特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける特徴点対応手段と、
前記特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該特徴点対応手段により対応付けられた各特徴点について、世界座標系で表される3次元座標を推定する座標推定手段と、
前記特徴点対応手段により対応付けられた特徴点を計数する特徴点計数手段と、
前記座標推定手段による推定結果と、前記特徴点計数手段による計数結果と、に基づいて、前記映像を評価する評価手段と、を備え、
前記評価手段は、前記座標推定手段により3次元座標を推定できた場合に、前記特徴点計数手段による計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価装置。
【請求項2】
前記映像について奥行の有無を判定する奥行有無判定手段を備え、
前記奥行有無判定手段は、
前記座標推定手段により推定できた各特徴点の3次元座標を世界座標系からカメラ座標系に変換し、
前記座標推定手段により3次元座標を推定できた特徴点ごとに、前記カメラ座標系における奥行方向の座標値を求め、
前記座標推定手段により3次元座標を推定できた特徴点の中から、前記奥行方向の座標値の差分の絶対値が最も大きくなる2つを求め、
前記2つの特徴点の前記奥行方向の座標値の差分の絶対値が予め定められた閾値以上であれば、奥行が存在すると判定し、
前記評価手段は、前記座標推定手段により3次元座標を推定でき、かつ、前記奥行有無判定手段により奥行が存在すると判定された場合に、前記特徴点計数手段による計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする請求項1に記載の映像評価装置。
【請求項3】
前記特徴点は、2つ以上のエッジが交差するコーナーであることを特徴とする請求項1または2に記載の映像評価装置。
【請求項4】
前記座標推定手段は、
前記特徴点対応手段により対応付けられた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて反復計算アルゴリズムによる反復計算を行い、
前記反復計算が収束すれば、前記世界座標系で表される3次元座標を推定できたものとし、
前記反復計算が収束しなければ、前記世界座標系で表される3次元座標を推定できなかったものとすることを特徴とする請求項1から3のいずれかに記載の映像評価装置。
【請求項5】
前記座標推定手段は、
前記反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が第1閾値以下になれば、前記反復計算が収束したものとし、
前記反復計算を予め定められた回数繰り返すまでに、前回の反復計算からの反復計算結果の変化が前記第1閾値以下にならなければ、前記反復計算が収束しなかったものとすることを特徴とする請求項4に記載の映像評価装置。
【請求項6】
前記特徴点計数手段は、前記特徴点対応手段により対応付けられた特徴点のうち、前記座標推定手段により3次元座標を推定できたものを計数することを特徴とする請求項1から5のいずれかに記載の映像評価装置。
【請求項7】
前記映像は、多視点映像であり、
前記特徴点抽出手段は、前記多視点映像について、各視点の画像ごとに、特徴点を抽出し、
前記特徴点対応手段は、
前記特徴点抽出手段により抽出された特徴点のうち、同一の視点における互いに異なる画像に含まれる特徴点であって同一の特徴点同士を対応付けるとともに、
前記特徴点抽出手段により抽出された特徴点のうち、互いに異なる視点における画像に含まれる特徴点であって同一の特徴点同士を対応付けることを特徴とする請求項1から6のいずれかに記載の映像評価装置。
【請求項8】
映像を評価する映像評価方法であって、
前記映像を構成する画像ごとに、特徴点を抽出する第1のステップと、
前記第1のステップにおいて抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける第2のステップと、
前記第2のステップにおいて対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該第2のステップにおいて対応付けた各特徴点について、世界座標系で表される3次元座標を推定する第3のステップと、
前記第2のステップにおいて対応付けた特徴点を計数する第4のステップと、
前記第3のステップにおける推定結果と、前記第4のステップにおける計数結果と、に基づいて、前記映像を評価する第5のステップと、を備え、
前記第5のステップでは、前記第3のステップにおいて3次元座標を推定できた場合に、前記第4のステップにおける計数値が大きくなるに従って前記映像の奥行感を高く評価することを特徴とする映像評価方法。
【請求項9】
映像を評価する映像評価方法を、コンピュータに実行させるためのプログラムであって、
前記映像を構成する画像ごとに、特徴点を抽出する第1のステップと、
前記第1のステップにおいて抽出した特徴点のうち、互いに異なる画像に含まれる特徴点であって同一の特徴点同士を、対応付ける第2のステップと、
前記第2のステップにおいて対応付けた特徴点の対応関係と、各画像における特徴点の座標と、に基づいて、当該第2のステップにおいて対応付けた各特徴点について、世界座標系で表される3次元座標を推定する第3のステップと、
前記第2のステップにおいて対応付けた特徴点を計数する第4のステップと、
前記第3のステップにおける推定結果と、前記第4のステップにおける計数結果と、に基づいて、前記映像を評価する第5のステップと、をコンピュータに実行させ、
前記第5のステップでは、前記第3のステップにおいて3次元座標を推定できた場合に、前記第4のステップにおける計数値が大きくなるに従って前記映像の奥行感を高く評価させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−77971(P2013−77971A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−216482(P2011−216482)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
[ Back to top ]