
時刻修正機能付きGPS時計
【課題】消費電力を抑えつつGPS信号から時刻情報を確実に取得することができる時刻修正機能付きGPS時計を提供すること。
【解決手段】GPS信号の受信環境が悪く、受信レベルが所定の閾値以上ない場合には、1時間ごと(第1所定時間)に受信動作を行ない、その際、捕捉動作のみを行なってそれ以外の受信システムは休止状態とする。
また、受信状況がそれほど悪くはないが、正しいGPS時刻情報が得られるほど良くはない環境下では、4時間ごと(第2所定時間)に受信動作を行ない、捕捉動作に加えGPS時刻取得と内部時計との比較処理まで実施する。
このようにすることで、受信環境が悪化しているときには、捕捉動作による相関値のチェックのみを行ない、かつ受信動作を頻繁に繰り返すことで、回復の機会を逃さないように監視し、受信環境が良くなってきたら、GPS時刻情報まで取得するようにして、時刻修正の機会を増やすことが可能となる。
【解決手段】GPS信号の受信環境が悪く、受信レベルが所定の閾値以上ない場合には、1時間ごと(第1所定時間)に受信動作を行ない、その際、捕捉動作のみを行なってそれ以外の受信システムは休止状態とする。
また、受信状況がそれほど悪くはないが、正しいGPS時刻情報が得られるほど良くはない環境下では、4時間ごと(第2所定時間)に受信動作を行ない、捕捉動作に加えGPS時刻取得と内部時計との比較処理まで実施する。
このようにすることで、受信環境が悪化しているときには、捕捉動作による相関値のチェックのみを行ない、かつ受信動作を頻繁に繰り返すことで、回復の機会を逃さないように監視し、受信環境が良くなってきたら、GPS時刻情報まで取得するようにして、時刻修正の機会を増やすことが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受信されたGPS信号に含まれる時刻情報に基づいて時刻を修正するGPS時計に関する。
【背景技術】
【0002】
全地球測定システムであるGlobal Positioning System(GPS)は地球上にある受信機の位置を調べるための衛星測位システムであり、測位は捕捉した各衛星からの送信信号の到達時間から距離を求め、各衛星からの距離により受信機の地球上の3次元的な位置を受信機側で演算することにより行われる。測位の精度は到達時間の精度に大きく依存するため、衛星は原子時計に基づく正確な時刻を持っている。
【0003】
GPS衛星から送られてくるデータの中には測位に利用されるさまざまな情報が含まれており、衛星に搭載された原子時計に基づく時刻のデータ、衛星の軌道情報などが含まれる。そして、GPS衛星からの信号を受信する受信機側が、GPS衛星の時刻情報を得るには、GPS衛星からの信号のうち、TOW(Time of Week、GPS時刻、週はじめから一週間間毎に示される秒単位の情報)信号を受信する必要がある。
【0004】
そして、この時刻情報を得るには、GPS衛星からの電波を受信し、受信した信号の相関を取り、その後演算して時刻データを取得する必要がある。つまり、受信機のアンテナでGPS信号を受信し、その信号をRF手段(Radio Frequency)で中間周波数に変換し、その後、ベースバンド手段で相関を取りGPS信号を抽出し、さらに、抽出されたGPS信号を演算手段が演算して時刻情報を取り出す。
【0005】
標準電波受信機、長波電波時計では、決まった時刻に受信を行なう定時受信が一般的になってきているが、GPS受信機の場合、室内などの衛星を見通せないような建物内での受信感度が落ちるため、室内に置かれている可能性が高い夜中などでは、GPS信号の定時受信がうまくいかず、時刻を修正できない可能性がある。また、GPS信号から時刻情報を得る動作を受信が成功するまで何回も行うことになり電力消費が増大する。
一方で、GPS信号を受信してから実際に時刻情報を取得するには、RF手段、ベースバンド手段、演算手段などの各部を動作させる必要があり、消費電力も大きなものとなる。そのため、必要な電力をまかなうには、通常よりも電池サイズを大きくする必要が生じるが、時計等の計時装置は、小型化・省電力化が求められていることから、電池サイズを大きくできず、電池交換を頻繁に行う必要がでてくるなど、問題となっていた。
【0006】
なお、一般的な時計の問題であるが、通常、腕時計の蓋を開閉するには特殊な工具を必要とする場合が多く、ユーザーは簡単には電池交換をすることができない。仮に、ユーザーが電池交換をしやすくするために容易に蓋を開閉できるようにしたとすると、気密性、防水性を確保するための構造設計が難しくなる。また、充電式として電池交換を無くした場合でも、充電用の接点まわりの気密性、防水性を確保しなければならない。このように、消費電力の増大に備えなるためには、大幅な設計変更を行うなどして対応しなければならなかった。
【0007】
特許文献1には、所定の間隔で時刻コードを含む標準電波の受信タイミングに、受信不可能な環境にあり、時刻計数回路の現在時刻データの修正ができない場合、可能な限り早期に時刻データを取得すべく前記所定の間隔を短くして、現在時刻データの修正を行う技術が開示されている。
【0008】
特許文献2には、符号分割多元接続通信システム(CDMA)において通信を行う受信側の端末において、複数の部分相関部を駆動させる場合に、部分相関途中でその相関値からシステム同期可能でないことを判断し、該当する部分相関部の動作を停止させることによって、低消費電力を実現する同期捕捉回路の技術が開示されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平7−198877号公報
【特許文献2】特開2003−188767号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
背景技術で説明した特許文献1に開示される技術のように、一定間隔をおいた定時受信(例えば1時間)においては、受信環境が悪かったり偶然的な要因によって、単に受信間隔を短くしても受信が連続して失敗する可能性がある。この場合、内部時計の時刻が徐々にずれてくことになる。このように、環境が悪いにも関わらず通常の受信動作を行い、環境が悪ければ悪いほど受信回数が増加していくため、単に受信間隔を短くして通常の受信動作の回数を増やすのみでは消費電力が増大するだけであり、早期に時刻データを取得するための有効な解決手段とはいえない。つまり、環境が悪く、受信できない状況でも通常の受信動作を最後まで行なって受信情報を判別するため、無駄に電力を消費してしまう処理工程や回路がある。GPS信号を受信するような大きな電力を消費する時刻修正装置では、受信動作の回数が増えた場合、通常の受信動作と同じ受信時間で動作すると消費電力の増大が顕著となる。
【0011】
また、特許文献2に開示される技術では、受信側の端末において複数の部分相関部を駆動させる場合に、部分相関の計算途中で、その相関値からシステム同期可能でないことを判断し、該当する部分相関部の動作を停止させることが記載されているが、低消費電力を実現する同期捕捉回路を開示するのみであるため、上述の時刻修正装置のように、建物内などの室内での受信感度が落ちるような状況では、一部の相関部の動作を停止させることで低消費電力化が図れはするものの、室内に置かれている可能性が高い夜中のGPS信号の定時受信での時刻修正できない問題は解決されない。
【0012】
そこで本発明の目的は、上記従来技術の問題点に鑑み、GPS受信機を備えた時刻修正装置において、受信環境が悪かったり偶然的な要因によって定時受信が連続的に失敗するような状況下であっては、無駄に受信動作回数が増大することや、通常の受信動作と同じ受信時間で動作すると消費電力が増大してしまうことを回避し、消費電力を抑えつつGPS信号から時刻情報を確実に取得することができる時刻修正機能付きGPS時計を提供することである。
【課題を解決するための手段】
【0013】
本発明のGPS時計は、基本的に以下に示す構成を採用するものである。
【0014】
時刻を計時する内部時計と、GPS衛星から送信されるGPS信号を受信し、該GPS信号に基づきGPS時刻情報を取得するGPS受信ユニットと、該GPS受信ユニットで取得された前記GPS時刻情報に対応して、前記内部時計の計数する時刻を修正する演算装置と、を備えたGPS時計において、受信条件を満たすか否かを判断する受信条件判断手段と、GPS信号の受信レベルを、捕捉動作において算出される相関値に基づいて監視する受信レベル監視手段と、前記GPS時刻情報と前記内部時計の計数する時刻との時間差を算出して判断を下す時間差判定手段とを有し、前記受信レベル監視手段により受信レベルが予め設定されたレベルに達しないと判断された場合には、前記GPS受信ユニット
によるGPS信号の受信動作を休止し、第1所定時間経過した後に前記受信条件判断手段により受信条件を満たすか否かを判断し、前記受信レベル監視手段により受信レベルが予め設定されたレベルに達したと判断された場合であって、前記時間差判定手段により時間差が指定時間以上と判断された場合には、受信システムを休止し、第2所定時間経過した後に前記受信条件判断手段により受信条件を満たすか否かを判断することを特徴とする。前記受信レベルが予め設定された値を超えた場合に、GPS電波のドップラシフトを検出し、該ドップラシフトに基づいて前記GPS受信ユニットによるGPS受信動作を休止することが好ましい。
【0015】
前記受信レベル監視手段により受信レベルが予め設定されたレベルに達したと判断された場合に、前記GPS衛星の衛星番号を記憶し、次回のGPS衛星のサーチに該記憶された衛星番号、前記ドップラシフトの検出結果、および前記相関値の算出結果を用いることが好ましい。
【発明の効果】
【0016】
本発明によれば、正常に受信できないような状況下にあって、無駄な受信動作回数が増大することや、通常の受信動作と同じ受信時間で動作して消費電力が増大してしまうことを回避し、消費電力を抑えつつGPS信号から時刻情報を確実に取得することができる時刻修正機能付きGPS時計を提供できる。
また、受信条件判断手段は、種々の物理量を選択して用いて判断することで、時刻修正機能付きGPS時計を、使用者の使用環境に応じた構成とすることができる。
また、相関値の積算時間を可変し、より消費電力を低減できる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態である時刻修正機能付きのGPS時計を説明する機能ブロック図である。
【図2】制御部の構成を示すブロック図である。
【図3】第1の実施形態のフローチャートである。
【図4】第2の実施形態のフローチャートである。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態を図面と共に説明する。
【0019】
まず、現在運用されているGPS衛星からの、送信される時刻情報を含む電波の概略について説明する。測位情報および時刻情報を送信している複数のGPS衛星が、地球の高度約2万キロメートル上空を周回している。1つ1つのGPS衛星は、約12時間で地球を一周している。一般的なGPSアンテナの指向性や建物などの影響から、受信されるGPS信号が強い仰角域は45°〜90°で、天頂を通過する衛星の場合、その範囲内に存在するのは約6時間である。
【0020】
GPS衛星から送信されている電波の周波数は基本的には1575.42MHz(名称:L1波)であり、この周波数にC/Aと呼ばれる信号が重畳されている。この信号によって、航法メッセージと呼ばれるデータが送信される。航法メッセージには時刻情報が含まれる。
【0021】
航法メッセージの1サイクルはフレームと呼ばれる。1フレームは1500ビットであり、これを送信するのに30秒の時間がかかる。1フレームは5つのサブフレーム(各300ビット)から構成されている。サブフレーム1から順番に送信を始め、サブフレーム5を送信し終わると再びサブフレーム1の送信に戻る。
1つのサブフレームは10のワードに分割され、1ワードは30ビットである。各サブ
フレームの先頭にはTLM(telemetry)ワード、続けてHOW(handover)ワードが記述されている。TLMワードには同期用のパターン(プリンブル)、HOWワードには毎週日曜日の0時からの経過時間を表すGPS信号の時刻情報が含まれている。
【0022】
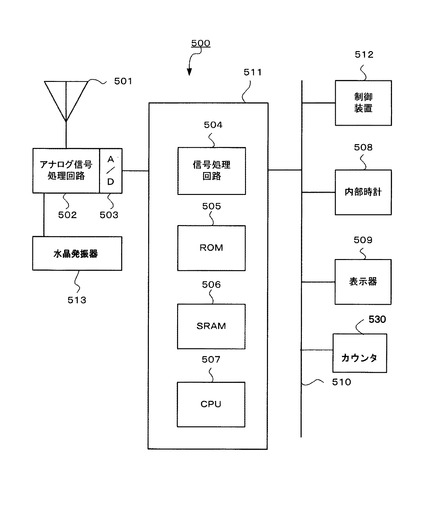
図1は、本発明の実施形態である時刻修正機能付きのGPS時計を説明する機能ブロック図である。GPS衛星からの送信される電波を受信するGPS時計500は、次の構成を備えている。
すなわち、アンテナ501は図示しないGPS衛星からの信号を受信する。アナログ信号処理回路502は、アンテナ501から入力されたGHz帯の高周波信号を数百MHzの中間周波に周波数変換する。水晶発振器513は中間周波に変換するのに用いられる。A/Dコンバータ503は、アナログ信号処理回路502から入力された中間周波信号をデジタルデータに変換する。
【0023】
受信したGPS信号から情報を取り出すには、各GPS衛星から送信されるGPS信号のC/Aコードと位相同期させなければならない。つまり、GPS衛星から送信されるフレームのデータを取得するために、ベースバンド部511でGPS衛星の信号と同期をとる。
信号処理回路504は、A/Dコンバータ503からデジタルデータを入力するとともに、CPU507の制御下で、捕捉対象とするGPS衛星のC/Aコードパターンデータ、およびC/A位相データを、ROM505の所定の格納領域から読み出す。そして、位相データに基づく位相でC/Aコードパターンデータを出力して比較用のC/Aコードを発生し、入力した前記デジタルデータと論理積(排他的論理和)をとることによって相関値を算出する。C/Aコードのコード長は1msである。この計算された相関値のデータはCPU507に読み取られ、相関値の大きさによりGPS衛星を捕捉できたか否かを判定する。
【0024】
ROM505には、前記比較用のC/Aコードを発生させるための基データのほか、このGPS時計500の動作プログラムなどが記憶されている。SRAM506には、一時記憶するメモリである。なお、信号処理回路504,ROM505,SRAM506,およびCPU507によりベースバンド部511を構成しており、ワンチップIC化することも可能である。
【0025】
GPS衛星を捕捉していない場合には、アナログ信号処理回路502、A/D変換器503、およびベースバンド部511におけるGPS受信処理に必要な動作を停止して、無駄な動作電力の消費を防止する。
あるいは、アナログ信号処理回路502およびA/D変換器503を例えば5ms程度だけ動かし、その間にA/D変換器503から出力されるデジタルデータをSRAM506に保存した後、アナログ信号処理回路502およびA/D変換器503を停止させてから、ベースバンド部511がSRAM506に保存されたデジタルデータの相関値を計算するようにしてもよい。
【0026】
このように、必要なときのみ各々の回路を動作させることで、無駄な電力消費を無くし、アナログ信号処理回路502およびA/D変換器503の動作と、ベースバンド部511における相関演算を同時に行わないようにして、電力消費のピークの増大を避けることができる。
【0027】
なお、相関値を算出する演算方法は、相関値の積算時間を可変に構成してもよいし、相関値の上昇のしかたによって積算時間を変更してもよい。また、GPS信号から時刻情報を得るために相関値を演算し、相関値に応じてGPS信号の受信間隔を変えてもよい。
【0028】
GPS衛星が捕捉できると、受信されたGPS信号をデコードすることによって航法メッセージデータを抽出する。航法メッセージデータには、GPS時刻情報を求めるためのデータ(Zカウント,GPS週番号など)が含まれており、CPU507によりGPS時刻情報が得られることになる。
【0029】
内部時計508は、図示しない水晶発信器などの基準発振器を内蔵しており、その基準発振信号を分周して時刻を計時する。この内部時計508はCPU507から入力されるGPS時刻情報によってリセットされ、上記基準発振器の発振周波数周波数誤差による時刻のずれが補償される。この内部時計508は、図示しないバッテリでバックアップされており、常時、計時している。表示器509は、内部時計で計時された時刻情報を表示する手段である。制御装置512はGPS時計500を全体的に制御する制御手段であり、内部時計508が活動時間帯にある場合など、受信動作が可能な条件下にある場合には、GPS受信処理に必要な回路を起動し、内部時計508の時刻修正を行う。活動時間帯としては、午前7時〜午前9時の通勤時間帯、または、人によっては外にいる可能性が高い時間帯、例えば日中の午前8時〜午後8時などに設定すれば、GPS時計を装着した使用者が屋外にいると想定できるため、GPS信号を受信し易くなる。
カウンタ530は、次の受信動作が行なわれるまでの待機時間を計測するものであり、第1所定時間および第2所定時間の設定値に応じて計数して、カウントアップしたら知らせるものである。
【0030】
GPS時計は、電波時計に較べて移動中の受信に強く、ユーザーが活動中でも受信ができるという特性を持つ一方、室内などの衛星が見通しにくい建物内では、逆に受信に弱くなるという弱点があり、本発明はこれらの特質を利用したものである。
一般的にユーザーが屋外にいる可能性が高い日中、例えば、内部時計で午前7時〜午後9時において受信状態を判定するための動作を定期的に行い、十分な相関値が得られないなど、受信に適さないと判断されれば動作を終了する。その他、いくつかの条件、動作パターンが考えられ後述する。
【0031】
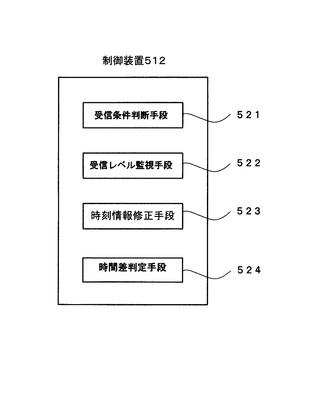
次に、本発明のGPS時計の制御について説明する。図2は、主に制御装置512において実行されるプログラムで実現される機能ブロックである。制御装置512は、受信条件判断手段521、受信レベル監視手段522、時刻情報修正手段523、時間差判定手段524を備える。
受信条件判断手段521は、前述の活動時間帯で受信するように制御するもので、内部時計508で計時内容が予め設定された時刻になった場合に、自動受信処理を行うようにしているもので、GPS装置を用いた受信処理の開始を制御する。受信レベル監視手段522は、受信レベルを判別し受信状態が適切かどうかを監視する処理を行う。時刻情報修正手段523は、受信した衛星信号から時刻情報を取得しGPS付き腕時計の時刻を修正する処理を行う。時間差判定手段524は、取得したGPS時刻情報と内部時計との差を求めて妥当かどうか判定する処理を行なう。
【0032】
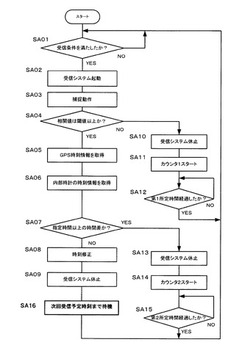
図3は、本発明の第1の実施形態である時刻修正機能付きのGPS時計が行う処理のアルゴリズムを示すフローチャートである。以下、各ステップに従って説明する。
まず、ステップSA01において、内部時計の計時内容から活動時間帯にあるかどうか判定することで受信条件を満たしたか否か判断する。受信条件を満たしていなければ、再びステップSA01に戻り、受信条件を満たすまでこれを繰り返す。これは、図2で示した制御装置512の中の受信条件判断手段521の機能に相当する処理である。
【0033】
受信条件を満たすと、ステップSA02でGPS電波の受信を開始するため受信システムを起動し、その後ステップSA03に進んで相関演算のみを実行する捕捉動作を行う。
ここで、受信条件判断手段521での受信条件を満たしたか否かの判断は、前述のような活動時間帯にあるかどうかにより判定する以外に、例えば、GPS信号受信起動ボタンが押されたか否かを検出する方法がある。これは、適した受信環境になったら使用者に操作してもらうことにより、最適な受信の機会を得るものである。他にも、光センサを用いて測定した物理量、振動センサを用いて測定した物理量を用いることで、屋外の受信に適した環境にあるかどうか判断することができる。
【0034】
ステップSA02で受信システムを起動したあと、ステップSA03で捕捉動作を行なうが、この時の相関演算について説明する。大まかには、衛星番号を1番から順次変更し、各衛星番号のGPS衛星をサーチし、その信号レベルを検出して相関値が最大となるものを特定する。つまり、GPS衛星のC/Aコードの発生タイミングを調整して、同期できるGPS衛星を判別するわけである。GPS衛星からは同一周波数で信号が送信されているが、GPS衛星毎に異なるC/Aコードを用いることで判別している。従って、受信したGPS衛星の衛星信号に含まれるC/Aコードを判別することで、現在、捕捉可能(同期可能)なGPS衛星を特定することができる。C/Aコードの判別は、受信した衛星信号と内部で生成したC/Aコードとの相関を取り、同じC/Aコードであればその出力は所定のタイミングでピーク値が出力されるが、異なるC/Aコードである場合は、出力はピークを持たず、常に零となることから、当該GPS衛星のC/Aコードを特定することが出来る。
【0035】
捕捉動作によって特定されたGPS衛星の衛星番号はSRAM506等の記憶部に記憶され、次回の時刻情報を取得する処理に用いることができる。前述したように、C/Aコードのコード長は1msであるので、C/Aコードの発生タイミングを調整しながらGPS衛星の捕捉動作を行っても、標準電波受信機と比較して短時間で受信処理を行える。
【0036】
ステップSA03の捕捉動作によって得られた相関値は、受信レベル監視手段522により相関値の大きさに基づく受信レベルの監視が行なわれ、ステップSA04において、予め設定された閾値以上か否かを判断し、特定された相関値が閾値以上である場合には、ステップSA05に進んでGPS時刻情報の取得動作を行なうが、相関値が閾値より下の場合には、GPS時刻情報の取得は行なわないまま、ステップSA10で受信システムを休止する。
ステップSA10で受信システムを休止状態とした後、ステップSA11でカウンタ1のカウントを開始する。カウンタ1が第1所定時間経過したことをステップSA12で確認すると、ステップSA01に戻り受信条件が満たされるのを待つ。
【0037】
GPS時刻情報は、HOWワードには毎週日曜日の0時からの経過時間を表すGPS信号の時刻情報などを取得することにより得られ、ステップSA05で実施される。ステップSA06で、内部時計の時刻情報を取得し、先に取得したGPS時刻情報との時刻情報の差が指定時間以上の時間差であるか否か判断し(ステップSA07)、指定時間以上の時間差がある場合には、ステップSA13で受信システムを休止した後、ステップSA14でカウンタ2のカウントを開始する。カウンタ2が第2所定時間経過したことをステップSA15で確認すると、ステップSA01に戻り受信条件が満たされるのを待つ。
【0038】
ここで指定時間以上の時間差が生じるのはどんな場合があるかを考えてみる。例えば、ステップSA05で、取得したGPS時刻情報を正常に取得できない環境にあると、パリティチェックで受信誤りが確認されることがあり、このままGPS時刻情報を取得した場合には、非存時刻や大幅に外れた時刻となって、正しい時刻情報と異なった時刻を表すことになる。このような誤ったGPS時刻情報は、内部時計の時刻情報と比較すると指定時間以上の時間差が生じる場合が多い。
【0039】
ステップSA07でのGPS時刻情報と内部時計の時刻情報と時間差が指定時間未満の場合、内蔵する水晶発振器の精度誤差により生じた時間差として、GPS時刻情報は正常に取得したものと判断できるため、ステップSA08では、先のステップSA05で取得されたGPS時刻情報と、ステップSA06で取得した内部時計の時刻情報に基づいて、内部時計の時刻情報を修正し、修正が完了するとステップSA09で受信システムを休止し、ステップSA01に戻って次回の受信動作を待つ。
【0040】
このように、時間差判定手段524は、ステップSA07で時間差の判定を行ない、その結果に応じて、一旦受信システムを休止状態とするか、あるいは直ちにステップSA08に進んで時刻情報修正手段523により内部時計の時刻を修正する。
【0041】
ここで、具体例として、第1所定時間として1時間、第2所定時間として4時間に設定した場合を考えてみる。まず、受信および時刻修正が正常に行なえた場合として、GPS信号を受信時の相関値が所定の閾値以上あり、取得したGPS時刻情報と内部時計の時間差が所定時間以内の場合である。内部時計が活動時間帯に入り受信環境が整ったと判断し(SA01)、受信システムの起動(SA02)および捕捉動作(SA03)によりGPS信号の受信を行ない、内部で発生した比較用のC/Aコードを用いて受信信号の相関値を判定する(SA04)。得られた相関値は所定の閾値以上あり、GPS衛星が特定されてGPS時刻情報を取得し(SA05)、内部時計の時刻情報を読み出して(SA06)、両時刻情報の時間差をとって判定し(SA07)、時間差が所定時間より小さく正常に受信できていることから、取得したGPS時刻情報を基に内部時計の時刻修正を行ない(SA08)、時刻修正完了後に受信システムの休止状態となって(SA09)、次回受信予定時刻まで待機状態となる(SA16)。なお、次回受信予定時刻として、前回と同じ受信時刻とするような定時受信や、24時間カウント後とする場合など色々あるが、概ね1日後となるような設定を行なえばよい。このように、正常な受信が行なえれば、時刻修正まで一気に処理して次回受信待機状態となる。
【0042】
次に、受信は正常だが時刻修正が出来ない場合、つまり受信は正常に行なえたものの、取得したGPS時刻情報に異常がありGPS時刻情報と内部時計の時間差が所定時間以上となる場合である。ステップSA01からSA04で受信を開始し捕捉動作を行なって相関値が所定の閾値以上であることを確認した後、ステップSA05およびSA06でGPS時刻情報と内部時計の時刻情報を取得して、両者の時間差をとった結果(SA07)、所定時間以上となっているため、受信システムを休止し(SA13)、カウンタ2として4時間のカウントが開始する(SA14)。4時間経過したら(SA15)再び受信条件が整うのを待って(SA01)受信動作から繰り返す。これが繰り返されている状態では、4時間ごとに受信動作を行なって、GPS時刻情報を正常に取得するチャンスを待つ。
【0043】
この間、さらに受信環境が悪化して、正常に受信することが難しくなってくると、ステップSA03の捕捉動作で得られたGPS信号の相関は低くなり、相関値の判定結果(SA04)では所定の閾値より小さくなって、直ちに受信システムを休止し(SA10)、カウンタ1として1時間のカウントが開始する(SA11)。1時間経過して(SA12)再び受信条件が整うのを待って(SA01)受信動作から繰り返す。この状態では、1時間ごとに受信動作を行なって、受信環境が回復するのを待つ。
【0044】
このように、受信環境がかなり悪く、捕捉したGPS信号の相関値が、所定の閾値以上ない場合には、1時間ごとに受信動作を行ない、その際、捕捉動作のみを行なってそれ以外の受信システムは休止状態とする。
また、受信状況がそれほど悪くはないが、正しいGPS時刻情報が得られるほど良くはない環境下では、4時間ごとに受信動作を行ない、捕捉動作に加えGPS時刻取得と内部時計との比較処理まで実施する。そのため、捕捉動作のみを行なう場合に比べて消費電力
が余計にかかるものの、正常に受信できれば直ちに時刻を修正することができる。
【0045】
受信環境が悪化しているときには、GPS時刻情報を正確に取得するのは難しいため、捕捉動作による相関値のチェックのみを行ない、かつ受信動作を頻繁に繰り返すことで、回復の機会を逃さないように監視し、受信環境が良くなってきたら、捕捉動作後にGPS時刻情報まで取得するようにして、時刻修正の機会を増やすことが可能となり、受信環境が良くない状態が長期にわたり継続したとしても、GPS時刻情報の取得が行なえないまま時刻修正が出来ずに内部時計がずれていってしまうのを防止するとともに、この間の受信動作にかかる消費電力を低減することが出来る。
【0046】
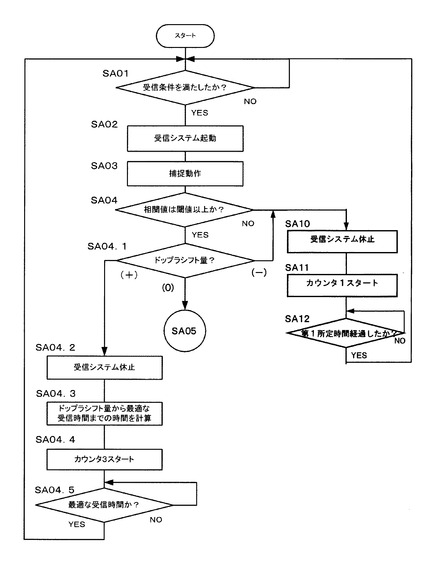
次に、第2の実施形態として、GPS信号のドップラ効果を利用した場合を説明する。
ドップラ効果によるGPS信号の受信周波数ずれ(ドップラシフト)については以下の通りである。
GPS衛星から送信されるGPS信号の周波数(送信周波数)は、すべての衛星で同じ周波数であることは説明した。但し、受信機における受信周波数は、受信機に対するGPS衛星の仰角によって変動する。これは、受信周波数にドップラ効果などが影響するためである。具体的には、受信機に対して天頂に位置するGPS衛星から信号を受信する場合、ドップラシフト(周波数ずれ)は0となり、送信周波数に対する受信周波数のずれ量も0となる。
【0047】
一方、ドップラシフトは、仰角が低いほど大きくなり、送信周波数からのずれ量が大きくなる。また、ドップラシフトは、GPS衛星が受信機に近づく方向に移動して向かってくる場合にはプラス方向(+)、つまり、周波数が高くなる方向に変化し、GPS衛星が受信機から遠ざかり地平線に向かって沈んでいく場合にマイナス方向(−)、つまり、周波数が低くなる方向に変化する。
GPS衛星が仰角0°〜仰角90°、天頂を通過してまた仰角が0°になるまで、ドップラシフトが(+)→(0)→(−)と連続的に変化していくため、これを検知すれば、おおよその衛星位置を把握して、次のGPS信号の受信時間を予め予測して行うことができる。
【0048】
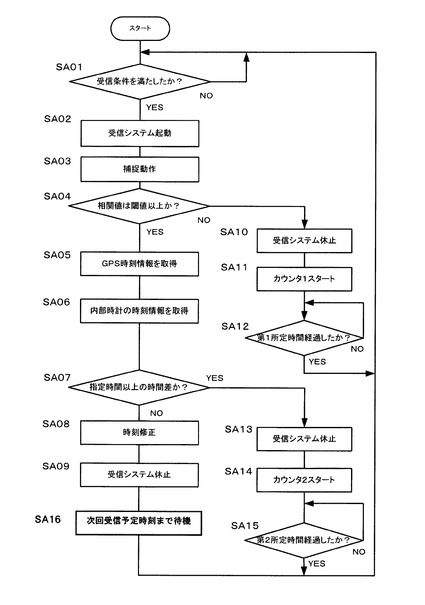
図4は、本実施の形態を説明するフローチャートであり、GPS衛星が天頂方向へ移動しているか否かに基づいてGPS時刻情報の取得を継続するか否か判断する処理を含むアルゴリズムを示している。GPS衛星から送信された電波を受信した際の受信電波のドップラ周波数の偏差を計測し、その値が“0”に近いほど、GPS衛星は天頂に位置しているため受信しやすい。また、ドップラ周波数の周波数の偏移が増加か減少かによってGPS衛星が天頂に向かう方向か、天頂からずれる方向かを判別することができる。このように、GPS衛星の位置によって異なる周波数のGPS信号が得られることを利用して、GPS時計情報を取得する時期を予測し、最適な受信動作を行なうものである。
【0049】
以下、図4の各ステップに従って説明する。
ステップSA01において、内部時計の計時内容から活動時間帯にあるかどうか判定することで受信条件を満たしたか否か判断する。受信条件を満たしていなければ、再びステップSA01に戻り、受信条件を満たすまでこれを繰り返す。受信条件を満たすと、ステップSA02でGPS電波の受信を開始するため受信システムを起動し、その後ステップSA03に進んで相関演算のみを実行する捕捉動作を行う。ここまでの流れは、図3のフローチャートと同じであり、同一番号のステップは同じ処理を行なう。
【0050】
ステップSA04では、捕捉動作によって得られる相関値が予め設定された閾値以上か否か判断し、所定の閾値以上である場合にはドップラシフト量に応じた処理に進み、相関値が予め設定された閾値以上でない場合には、ステップSA10へ移行して、受信システ
ムの休止(SA10)、カウンタ1のカウント開始(SA11)、第1所定時間経過の判断(SA12)の後に、ステップSA01に戻る。
【0051】
ステップSA04.1では、受信したGPS信号の周波数ずれからドップラシフト量を算出して、(−)、(0)、(+)の周波数偏移に応じたGPS衛星の挙動を察知し、最適な処理を行なうものである。
ステップSA04.1において、ドップラシフト量が、マイナス(−)偏移の場合には、衛星が遠方に離れていくために受信状態が悪くなるものとして、当該衛星からのGPS時刻情報の取得は見送ってステップSA10に進み、受信システムの休止(SA10)、カウンタ1のカウント開始(SA11)、第1所定時間経過の判断(SA12)を経て、ステップSA01に戻る。
【0052】
また、ドップラシフトが無く(0)偏移の場合には、GPS衛星が天頂付近の最も受信に適した軌道上にあると判断できるため、ステップSA05に進み、GPS時刻情報を取得して内部時計の時刻修正を行なう。なお、ステップSA05以降の処理内容は、図3のステップSA05〜SA09、およびSA13〜SA16と同じであるので図4では略記したが、処理が完了するとステップSA01に戻り、受信条件が整うのを待って受信動作から繰り返す。
【0053】
一方、ドップラシフト量が(+)の場合には、GPS衛星が遠方より近づいてきていると考えられるため、ステップSA04.2で一旦受信システムを休止した後、ステップSA04.3でドップラシフト量から最適な受信時間までの時間を計算し、ステップSA04.4でカウンタ3のカウントを開始して、最適な受信時間になるまで待つ。ステップSA04.5において設定時間の経過を確認したら、一旦ステップSA01に戻って受信動作から行なう。このとき、GPS衛星は受信に最適な軌道上、つまり天頂上に到達しているはずであり、ステップSA04.1でのドップラシフト量の算出結果は(0)となってステップSA05へ進み、GPS時刻情報の取得および内部時計の時刻修正を行なった後にステップSA01に戻る。
【0054】
このように、ドップラシフト量に基づいてGPS衛星の軌道情報を得て、受信可否の判定条件に加えることで、さらに効率的かつ低消費電力で受信を行なうことが可能となる。
【0055】
次に、第3の実施形態として、次回のGPS衛星のサーチを行なう際に、GPS衛星の衛星番号、ドップラシフト量および相関値の算出結果を用いる場合について説明する。
衛星の捕捉動作により、SRAM506には衛星番号が記憶されており、時刻情報の取得は当該番号の衛星によって行なわれたものである。そのため、次回の受信動作における衛星のサーチでこの衛星番号を用いれば、短時間かつ低消費電力で確度の高い受信を行なうことが可能となる。
また、受信レベル監視手段で算出した相関値から、閾値の目安がわかるため、次回の受信動作で閾値設定の最適値が設定できるようになり、受信確度の向上に寄与することができる。
これら2つの記憶情報に加え、第2の実施形態で説明したドップラシフトの検出結果を利用することで、次回の受信動作を衛星からの信号を受信しやすい最適なタイミングで行なうことが可能となる。
【0056】
このことを、第2の実施形態の説明で用いた図4のフローチャートにて説明する。
ステップSA01で受信条件を満たしたと判断すると、ステップSA02で受信システムを起動し、SA03に進んで相関演算による捕捉動作を行なうが、捕捉動作が完了した時点で受信対象となる衛星が特定されるため、この衛星番号をSRAM506の記憶領域に保持する。
続くステップSA04で、この捕捉動作で得られた相関値が予め設定された閾値以上か否か判断し、所定の閾値以上である場合にはドップラシフト量に応じた処理に進むとともに、ステップSA03で得られた相関値、およびステップSA04で用いた閾値は、一時的にSRAM506の記憶領域に保持される。
ここで、相関値が予め設定された閾値以上でない場合には、ステップSA10へ移行して、受信システムの休止(SA10)、カウンタ1のカウント開始(SA11)、第1所定時間経過の判断(SA12)の後に、ステップSA01に戻る。
【0057】
ステップSA04.1でドップラシフト量を算出してから、その周波数偏移に応じたGPS衛星の挙動を察知し、続く処理を行なうまでの流れは、第2の実施形態で説明したとおりである。
この中で、ドップラシフトがプラス方向(+)、つまりGPS衛星が近づいてくる場合は、ステップSA04.2で受信システムを休止した後、ステップSA04.3およびステップSA04.4を経て、ステップSA04.5で最適な受信時間になるまで待ってからステップSA01に戻る。
【0058】
受信動作が完了し、ステップSA01に戻ったときには、衛星番号、相関値とその時に設定されていた閾値、ドップラシフトの検出結果といった、前回の受信動作で得られた各値を記憶した状態である。ステップSA01に戻り受信条件が満たされてステップSA02で受信システムを起動した後、ステップSA03で捕捉動作を行なう際に、前回取得して記憶してある衛星番号を用いる。
第1の実施形態で説明した捕捉動作は、衛星番号を1番から順次変更し、各衛星番号のGPS衛星をサーチし、その信号レベルを検出して相関値が最大となるものを特定するものであったが、現時点では、衛星番号を記憶したGPS衛星が受信に最適な軌道上、つまり天頂上に到達するはずであるので、当該衛星を用いて捕捉動作を行なう。
【0059】
これにより、捕捉動作に必要な相関値の算出の仕方を工夫できる。例えば、動作させる相関器の数を減らして、当該衛星番号に対応した最少1つのみ動作することで消費電力を低減でき、一方、全ての相関器を当該衛星の相関値算出にあてがうことにより、演算時間を短縮することができる。また、両者を併用することで、効率よく動作させることも可能となる。
あるいは、捕捉動作時の衛星番号の変更順序として、1番の衛星からではなく、当該衛星番号からサーチを開始するようにすれば、万が一、当該衛星を検出できなかったとしても、他の衛星をサーチするので問題の発生を抑えることができる。
【0060】
ステップSA03の捕捉動作によって相関値を得た後、ステップSA04で予め設定された閾値以上か否かを判断するが、前回算出した相関値およびその時に設定されていた閾値、およびドップラシフトの検出結果が記憶領域に保持されており、これらを関連付けたテーブルを作成しておくことで、相互の関係から最適な閾値の選択設定が可能となる。例えば、記憶保持した時点でのドップラシフト量と相関値との関係から、GPS衛星が受信に最適な軌道上に位置したときの相関値が、前回の相関値からどの程度大きくなるかテーブルを参照して予測値を拾い出し、これに合わせて閾値の設定をするようにすれば、受信レベルの監視において確度の高い判断を行なうことが可能となる。
【0061】
このように、受信動作の際に得られた各種値を記憶しておき、次回の受信動作で用いることにより、さらなる効率化および低消費電力化が図られる。
【符号の説明】
【0062】
500 GPS時計
501 アンテナ
502 アナログ信号処理回路
503 A/D変換器
504 ベースバンド回路
505 ROM
506 SRAM
507 CPU
508 内部時計
509 表示器
510 バス
511 ベースバンド部
512 制御装置
513 水晶発振器
521 受信条件判断手段
522 受信レベル監視手段
523 時刻情報修正手段
524 時間差判定手段
530 カウンタ
【技術分野】
【0001】
本発明は、受信されたGPS信号に含まれる時刻情報に基づいて時刻を修正するGPS時計に関する。
【背景技術】
【0002】
全地球測定システムであるGlobal Positioning System(GPS)は地球上にある受信機の位置を調べるための衛星測位システムであり、測位は捕捉した各衛星からの送信信号の到達時間から距離を求め、各衛星からの距離により受信機の地球上の3次元的な位置を受信機側で演算することにより行われる。測位の精度は到達時間の精度に大きく依存するため、衛星は原子時計に基づく正確な時刻を持っている。
【0003】
GPS衛星から送られてくるデータの中には測位に利用されるさまざまな情報が含まれており、衛星に搭載された原子時計に基づく時刻のデータ、衛星の軌道情報などが含まれる。そして、GPS衛星からの信号を受信する受信機側が、GPS衛星の時刻情報を得るには、GPS衛星からの信号のうち、TOW(Time of Week、GPS時刻、週はじめから一週間間毎に示される秒単位の情報)信号を受信する必要がある。
【0004】
そして、この時刻情報を得るには、GPS衛星からの電波を受信し、受信した信号の相関を取り、その後演算して時刻データを取得する必要がある。つまり、受信機のアンテナでGPS信号を受信し、その信号をRF手段(Radio Frequency)で中間周波数に変換し、その後、ベースバンド手段で相関を取りGPS信号を抽出し、さらに、抽出されたGPS信号を演算手段が演算して時刻情報を取り出す。
【0005】
標準電波受信機、長波電波時計では、決まった時刻に受信を行なう定時受信が一般的になってきているが、GPS受信機の場合、室内などの衛星を見通せないような建物内での受信感度が落ちるため、室内に置かれている可能性が高い夜中などでは、GPS信号の定時受信がうまくいかず、時刻を修正できない可能性がある。また、GPS信号から時刻情報を得る動作を受信が成功するまで何回も行うことになり電力消費が増大する。
一方で、GPS信号を受信してから実際に時刻情報を取得するには、RF手段、ベースバンド手段、演算手段などの各部を動作させる必要があり、消費電力も大きなものとなる。そのため、必要な電力をまかなうには、通常よりも電池サイズを大きくする必要が生じるが、時計等の計時装置は、小型化・省電力化が求められていることから、電池サイズを大きくできず、電池交換を頻繁に行う必要がでてくるなど、問題となっていた。
【0006】
なお、一般的な時計の問題であるが、通常、腕時計の蓋を開閉するには特殊な工具を必要とする場合が多く、ユーザーは簡単には電池交換をすることができない。仮に、ユーザーが電池交換をしやすくするために容易に蓋を開閉できるようにしたとすると、気密性、防水性を確保するための構造設計が難しくなる。また、充電式として電池交換を無くした場合でも、充電用の接点まわりの気密性、防水性を確保しなければならない。このように、消費電力の増大に備えなるためには、大幅な設計変更を行うなどして対応しなければならなかった。
【0007】
特許文献1には、所定の間隔で時刻コードを含む標準電波の受信タイミングに、受信不可能な環境にあり、時刻計数回路の現在時刻データの修正ができない場合、可能な限り早期に時刻データを取得すべく前記所定の間隔を短くして、現在時刻データの修正を行う技術が開示されている。
【0008】
特許文献2には、符号分割多元接続通信システム(CDMA)において通信を行う受信側の端末において、複数の部分相関部を駆動させる場合に、部分相関途中でその相関値からシステム同期可能でないことを判断し、該当する部分相関部の動作を停止させることによって、低消費電力を実現する同期捕捉回路の技術が開示されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平7−198877号公報
【特許文献2】特開2003−188767号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
背景技術で説明した特許文献1に開示される技術のように、一定間隔をおいた定時受信(例えば1時間)においては、受信環境が悪かったり偶然的な要因によって、単に受信間隔を短くしても受信が連続して失敗する可能性がある。この場合、内部時計の時刻が徐々にずれてくことになる。このように、環境が悪いにも関わらず通常の受信動作を行い、環境が悪ければ悪いほど受信回数が増加していくため、単に受信間隔を短くして通常の受信動作の回数を増やすのみでは消費電力が増大するだけであり、早期に時刻データを取得するための有効な解決手段とはいえない。つまり、環境が悪く、受信できない状況でも通常の受信動作を最後まで行なって受信情報を判別するため、無駄に電力を消費してしまう処理工程や回路がある。GPS信号を受信するような大きな電力を消費する時刻修正装置では、受信動作の回数が増えた場合、通常の受信動作と同じ受信時間で動作すると消費電力の増大が顕著となる。
【0011】
また、特許文献2に開示される技術では、受信側の端末において複数の部分相関部を駆動させる場合に、部分相関の計算途中で、その相関値からシステム同期可能でないことを判断し、該当する部分相関部の動作を停止させることが記載されているが、低消費電力を実現する同期捕捉回路を開示するのみであるため、上述の時刻修正装置のように、建物内などの室内での受信感度が落ちるような状況では、一部の相関部の動作を停止させることで低消費電力化が図れはするものの、室内に置かれている可能性が高い夜中のGPS信号の定時受信での時刻修正できない問題は解決されない。
【0012】
そこで本発明の目的は、上記従来技術の問題点に鑑み、GPS受信機を備えた時刻修正装置において、受信環境が悪かったり偶然的な要因によって定時受信が連続的に失敗するような状況下であっては、無駄に受信動作回数が増大することや、通常の受信動作と同じ受信時間で動作すると消費電力が増大してしまうことを回避し、消費電力を抑えつつGPS信号から時刻情報を確実に取得することができる時刻修正機能付きGPS時計を提供することである。
【課題を解決するための手段】
【0013】
本発明のGPS時計は、基本的に以下に示す構成を採用するものである。
【0014】
時刻を計時する内部時計と、GPS衛星から送信されるGPS信号を受信し、該GPS信号に基づきGPS時刻情報を取得するGPS受信ユニットと、該GPS受信ユニットで取得された前記GPS時刻情報に対応して、前記内部時計の計数する時刻を修正する演算装置と、を備えたGPS時計において、受信条件を満たすか否かを判断する受信条件判断手段と、GPS信号の受信レベルを、捕捉動作において算出される相関値に基づいて監視する受信レベル監視手段と、前記GPS時刻情報と前記内部時計の計数する時刻との時間差を算出して判断を下す時間差判定手段とを有し、前記受信レベル監視手段により受信レベルが予め設定されたレベルに達しないと判断された場合には、前記GPS受信ユニット
によるGPS信号の受信動作を休止し、第1所定時間経過した後に前記受信条件判断手段により受信条件を満たすか否かを判断し、前記受信レベル監視手段により受信レベルが予め設定されたレベルに達したと判断された場合であって、前記時間差判定手段により時間差が指定時間以上と判断された場合には、受信システムを休止し、第2所定時間経過した後に前記受信条件判断手段により受信条件を満たすか否かを判断することを特徴とする。前記受信レベルが予め設定された値を超えた場合に、GPS電波のドップラシフトを検出し、該ドップラシフトに基づいて前記GPS受信ユニットによるGPS受信動作を休止することが好ましい。
【0015】
前記受信レベル監視手段により受信レベルが予め設定されたレベルに達したと判断された場合に、前記GPS衛星の衛星番号を記憶し、次回のGPS衛星のサーチに該記憶された衛星番号、前記ドップラシフトの検出結果、および前記相関値の算出結果を用いることが好ましい。
【発明の効果】
【0016】
本発明によれば、正常に受信できないような状況下にあって、無駄な受信動作回数が増大することや、通常の受信動作と同じ受信時間で動作して消費電力が増大してしまうことを回避し、消費電力を抑えつつGPS信号から時刻情報を確実に取得することができる時刻修正機能付きGPS時計を提供できる。
また、受信条件判断手段は、種々の物理量を選択して用いて判断することで、時刻修正機能付きGPS時計を、使用者の使用環境に応じた構成とすることができる。
また、相関値の積算時間を可変し、より消費電力を低減できる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態である時刻修正機能付きのGPS時計を説明する機能ブロック図である。
【図2】制御部の構成を示すブロック図である。
【図3】第1の実施形態のフローチャートである。
【図4】第2の実施形態のフローチャートである。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態を図面と共に説明する。
【0019】
まず、現在運用されているGPS衛星からの、送信される時刻情報を含む電波の概略について説明する。測位情報および時刻情報を送信している複数のGPS衛星が、地球の高度約2万キロメートル上空を周回している。1つ1つのGPS衛星は、約12時間で地球を一周している。一般的なGPSアンテナの指向性や建物などの影響から、受信されるGPS信号が強い仰角域は45°〜90°で、天頂を通過する衛星の場合、その範囲内に存在するのは約6時間である。
【0020】
GPS衛星から送信されている電波の周波数は基本的には1575.42MHz(名称:L1波)であり、この周波数にC/Aと呼ばれる信号が重畳されている。この信号によって、航法メッセージと呼ばれるデータが送信される。航法メッセージには時刻情報が含まれる。
【0021】
航法メッセージの1サイクルはフレームと呼ばれる。1フレームは1500ビットであり、これを送信するのに30秒の時間がかかる。1フレームは5つのサブフレーム(各300ビット)から構成されている。サブフレーム1から順番に送信を始め、サブフレーム5を送信し終わると再びサブフレーム1の送信に戻る。
1つのサブフレームは10のワードに分割され、1ワードは30ビットである。各サブ
フレームの先頭にはTLM(telemetry)ワード、続けてHOW(handover)ワードが記述されている。TLMワードには同期用のパターン(プリンブル)、HOWワードには毎週日曜日の0時からの経過時間を表すGPS信号の時刻情報が含まれている。
【0022】
図1は、本発明の実施形態である時刻修正機能付きのGPS時計を説明する機能ブロック図である。GPS衛星からの送信される電波を受信するGPS時計500は、次の構成を備えている。
すなわち、アンテナ501は図示しないGPS衛星からの信号を受信する。アナログ信号処理回路502は、アンテナ501から入力されたGHz帯の高周波信号を数百MHzの中間周波に周波数変換する。水晶発振器513は中間周波に変換するのに用いられる。A/Dコンバータ503は、アナログ信号処理回路502から入力された中間周波信号をデジタルデータに変換する。
【0023】
受信したGPS信号から情報を取り出すには、各GPS衛星から送信されるGPS信号のC/Aコードと位相同期させなければならない。つまり、GPS衛星から送信されるフレームのデータを取得するために、ベースバンド部511でGPS衛星の信号と同期をとる。
信号処理回路504は、A/Dコンバータ503からデジタルデータを入力するとともに、CPU507の制御下で、捕捉対象とするGPS衛星のC/Aコードパターンデータ、およびC/A位相データを、ROM505の所定の格納領域から読み出す。そして、位相データに基づく位相でC/Aコードパターンデータを出力して比較用のC/Aコードを発生し、入力した前記デジタルデータと論理積(排他的論理和)をとることによって相関値を算出する。C/Aコードのコード長は1msである。この計算された相関値のデータはCPU507に読み取られ、相関値の大きさによりGPS衛星を捕捉できたか否かを判定する。
【0024】
ROM505には、前記比較用のC/Aコードを発生させるための基データのほか、このGPS時計500の動作プログラムなどが記憶されている。SRAM506には、一時記憶するメモリである。なお、信号処理回路504,ROM505,SRAM506,およびCPU507によりベースバンド部511を構成しており、ワンチップIC化することも可能である。
【0025】
GPS衛星を捕捉していない場合には、アナログ信号処理回路502、A/D変換器503、およびベースバンド部511におけるGPS受信処理に必要な動作を停止して、無駄な動作電力の消費を防止する。
あるいは、アナログ信号処理回路502およびA/D変換器503を例えば5ms程度だけ動かし、その間にA/D変換器503から出力されるデジタルデータをSRAM506に保存した後、アナログ信号処理回路502およびA/D変換器503を停止させてから、ベースバンド部511がSRAM506に保存されたデジタルデータの相関値を計算するようにしてもよい。
【0026】
このように、必要なときのみ各々の回路を動作させることで、無駄な電力消費を無くし、アナログ信号処理回路502およびA/D変換器503の動作と、ベースバンド部511における相関演算を同時に行わないようにして、電力消費のピークの増大を避けることができる。
【0027】
なお、相関値を算出する演算方法は、相関値の積算時間を可変に構成してもよいし、相関値の上昇のしかたによって積算時間を変更してもよい。また、GPS信号から時刻情報を得るために相関値を演算し、相関値に応じてGPS信号の受信間隔を変えてもよい。
【0028】
GPS衛星が捕捉できると、受信されたGPS信号をデコードすることによって航法メッセージデータを抽出する。航法メッセージデータには、GPS時刻情報を求めるためのデータ(Zカウント,GPS週番号など)が含まれており、CPU507によりGPS時刻情報が得られることになる。
【0029】
内部時計508は、図示しない水晶発信器などの基準発振器を内蔵しており、その基準発振信号を分周して時刻を計時する。この内部時計508はCPU507から入力されるGPS時刻情報によってリセットされ、上記基準発振器の発振周波数周波数誤差による時刻のずれが補償される。この内部時計508は、図示しないバッテリでバックアップされており、常時、計時している。表示器509は、内部時計で計時された時刻情報を表示する手段である。制御装置512はGPS時計500を全体的に制御する制御手段であり、内部時計508が活動時間帯にある場合など、受信動作が可能な条件下にある場合には、GPS受信処理に必要な回路を起動し、内部時計508の時刻修正を行う。活動時間帯としては、午前7時〜午前9時の通勤時間帯、または、人によっては外にいる可能性が高い時間帯、例えば日中の午前8時〜午後8時などに設定すれば、GPS時計を装着した使用者が屋外にいると想定できるため、GPS信号を受信し易くなる。
カウンタ530は、次の受信動作が行なわれるまでの待機時間を計測するものであり、第1所定時間および第2所定時間の設定値に応じて計数して、カウントアップしたら知らせるものである。
【0030】
GPS時計は、電波時計に較べて移動中の受信に強く、ユーザーが活動中でも受信ができるという特性を持つ一方、室内などの衛星が見通しにくい建物内では、逆に受信に弱くなるという弱点があり、本発明はこれらの特質を利用したものである。
一般的にユーザーが屋外にいる可能性が高い日中、例えば、内部時計で午前7時〜午後9時において受信状態を判定するための動作を定期的に行い、十分な相関値が得られないなど、受信に適さないと判断されれば動作を終了する。その他、いくつかの条件、動作パターンが考えられ後述する。
【0031】
次に、本発明のGPS時計の制御について説明する。図2は、主に制御装置512において実行されるプログラムで実現される機能ブロックである。制御装置512は、受信条件判断手段521、受信レベル監視手段522、時刻情報修正手段523、時間差判定手段524を備える。
受信条件判断手段521は、前述の活動時間帯で受信するように制御するもので、内部時計508で計時内容が予め設定された時刻になった場合に、自動受信処理を行うようにしているもので、GPS装置を用いた受信処理の開始を制御する。受信レベル監視手段522は、受信レベルを判別し受信状態が適切かどうかを監視する処理を行う。時刻情報修正手段523は、受信した衛星信号から時刻情報を取得しGPS付き腕時計の時刻を修正する処理を行う。時間差判定手段524は、取得したGPS時刻情報と内部時計との差を求めて妥当かどうか判定する処理を行なう。
【0032】
図3は、本発明の第1の実施形態である時刻修正機能付きのGPS時計が行う処理のアルゴリズムを示すフローチャートである。以下、各ステップに従って説明する。
まず、ステップSA01において、内部時計の計時内容から活動時間帯にあるかどうか判定することで受信条件を満たしたか否か判断する。受信条件を満たしていなければ、再びステップSA01に戻り、受信条件を満たすまでこれを繰り返す。これは、図2で示した制御装置512の中の受信条件判断手段521の機能に相当する処理である。
【0033】
受信条件を満たすと、ステップSA02でGPS電波の受信を開始するため受信システムを起動し、その後ステップSA03に進んで相関演算のみを実行する捕捉動作を行う。
ここで、受信条件判断手段521での受信条件を満たしたか否かの判断は、前述のような活動時間帯にあるかどうかにより判定する以外に、例えば、GPS信号受信起動ボタンが押されたか否かを検出する方法がある。これは、適した受信環境になったら使用者に操作してもらうことにより、最適な受信の機会を得るものである。他にも、光センサを用いて測定した物理量、振動センサを用いて測定した物理量を用いることで、屋外の受信に適した環境にあるかどうか判断することができる。
【0034】
ステップSA02で受信システムを起動したあと、ステップSA03で捕捉動作を行なうが、この時の相関演算について説明する。大まかには、衛星番号を1番から順次変更し、各衛星番号のGPS衛星をサーチし、その信号レベルを検出して相関値が最大となるものを特定する。つまり、GPS衛星のC/Aコードの発生タイミングを調整して、同期できるGPS衛星を判別するわけである。GPS衛星からは同一周波数で信号が送信されているが、GPS衛星毎に異なるC/Aコードを用いることで判別している。従って、受信したGPS衛星の衛星信号に含まれるC/Aコードを判別することで、現在、捕捉可能(同期可能)なGPS衛星を特定することができる。C/Aコードの判別は、受信した衛星信号と内部で生成したC/Aコードとの相関を取り、同じC/Aコードであればその出力は所定のタイミングでピーク値が出力されるが、異なるC/Aコードである場合は、出力はピークを持たず、常に零となることから、当該GPS衛星のC/Aコードを特定することが出来る。
【0035】
捕捉動作によって特定されたGPS衛星の衛星番号はSRAM506等の記憶部に記憶され、次回の時刻情報を取得する処理に用いることができる。前述したように、C/Aコードのコード長は1msであるので、C/Aコードの発生タイミングを調整しながらGPS衛星の捕捉動作を行っても、標準電波受信機と比較して短時間で受信処理を行える。
【0036】
ステップSA03の捕捉動作によって得られた相関値は、受信レベル監視手段522により相関値の大きさに基づく受信レベルの監視が行なわれ、ステップSA04において、予め設定された閾値以上か否かを判断し、特定された相関値が閾値以上である場合には、ステップSA05に進んでGPS時刻情報の取得動作を行なうが、相関値が閾値より下の場合には、GPS時刻情報の取得は行なわないまま、ステップSA10で受信システムを休止する。
ステップSA10で受信システムを休止状態とした後、ステップSA11でカウンタ1のカウントを開始する。カウンタ1が第1所定時間経過したことをステップSA12で確認すると、ステップSA01に戻り受信条件が満たされるのを待つ。
【0037】
GPS時刻情報は、HOWワードには毎週日曜日の0時からの経過時間を表すGPS信号の時刻情報などを取得することにより得られ、ステップSA05で実施される。ステップSA06で、内部時計の時刻情報を取得し、先に取得したGPS時刻情報との時刻情報の差が指定時間以上の時間差であるか否か判断し(ステップSA07)、指定時間以上の時間差がある場合には、ステップSA13で受信システムを休止した後、ステップSA14でカウンタ2のカウントを開始する。カウンタ2が第2所定時間経過したことをステップSA15で確認すると、ステップSA01に戻り受信条件が満たされるのを待つ。
【0038】
ここで指定時間以上の時間差が生じるのはどんな場合があるかを考えてみる。例えば、ステップSA05で、取得したGPS時刻情報を正常に取得できない環境にあると、パリティチェックで受信誤りが確認されることがあり、このままGPS時刻情報を取得した場合には、非存時刻や大幅に外れた時刻となって、正しい時刻情報と異なった時刻を表すことになる。このような誤ったGPS時刻情報は、内部時計の時刻情報と比較すると指定時間以上の時間差が生じる場合が多い。
【0039】
ステップSA07でのGPS時刻情報と内部時計の時刻情報と時間差が指定時間未満の場合、内蔵する水晶発振器の精度誤差により生じた時間差として、GPS時刻情報は正常に取得したものと判断できるため、ステップSA08では、先のステップSA05で取得されたGPS時刻情報と、ステップSA06で取得した内部時計の時刻情報に基づいて、内部時計の時刻情報を修正し、修正が完了するとステップSA09で受信システムを休止し、ステップSA01に戻って次回の受信動作を待つ。
【0040】
このように、時間差判定手段524は、ステップSA07で時間差の判定を行ない、その結果に応じて、一旦受信システムを休止状態とするか、あるいは直ちにステップSA08に進んで時刻情報修正手段523により内部時計の時刻を修正する。
【0041】
ここで、具体例として、第1所定時間として1時間、第2所定時間として4時間に設定した場合を考えてみる。まず、受信および時刻修正が正常に行なえた場合として、GPS信号を受信時の相関値が所定の閾値以上あり、取得したGPS時刻情報と内部時計の時間差が所定時間以内の場合である。内部時計が活動時間帯に入り受信環境が整ったと判断し(SA01)、受信システムの起動(SA02)および捕捉動作(SA03)によりGPS信号の受信を行ない、内部で発生した比較用のC/Aコードを用いて受信信号の相関値を判定する(SA04)。得られた相関値は所定の閾値以上あり、GPS衛星が特定されてGPS時刻情報を取得し(SA05)、内部時計の時刻情報を読み出して(SA06)、両時刻情報の時間差をとって判定し(SA07)、時間差が所定時間より小さく正常に受信できていることから、取得したGPS時刻情報を基に内部時計の時刻修正を行ない(SA08)、時刻修正完了後に受信システムの休止状態となって(SA09)、次回受信予定時刻まで待機状態となる(SA16)。なお、次回受信予定時刻として、前回と同じ受信時刻とするような定時受信や、24時間カウント後とする場合など色々あるが、概ね1日後となるような設定を行なえばよい。このように、正常な受信が行なえれば、時刻修正まで一気に処理して次回受信待機状態となる。
【0042】
次に、受信は正常だが時刻修正が出来ない場合、つまり受信は正常に行なえたものの、取得したGPS時刻情報に異常がありGPS時刻情報と内部時計の時間差が所定時間以上となる場合である。ステップSA01からSA04で受信を開始し捕捉動作を行なって相関値が所定の閾値以上であることを確認した後、ステップSA05およびSA06でGPS時刻情報と内部時計の時刻情報を取得して、両者の時間差をとった結果(SA07)、所定時間以上となっているため、受信システムを休止し(SA13)、カウンタ2として4時間のカウントが開始する(SA14)。4時間経過したら(SA15)再び受信条件が整うのを待って(SA01)受信動作から繰り返す。これが繰り返されている状態では、4時間ごとに受信動作を行なって、GPS時刻情報を正常に取得するチャンスを待つ。
【0043】
この間、さらに受信環境が悪化して、正常に受信することが難しくなってくると、ステップSA03の捕捉動作で得られたGPS信号の相関は低くなり、相関値の判定結果(SA04)では所定の閾値より小さくなって、直ちに受信システムを休止し(SA10)、カウンタ1として1時間のカウントが開始する(SA11)。1時間経過して(SA12)再び受信条件が整うのを待って(SA01)受信動作から繰り返す。この状態では、1時間ごとに受信動作を行なって、受信環境が回復するのを待つ。
【0044】
このように、受信環境がかなり悪く、捕捉したGPS信号の相関値が、所定の閾値以上ない場合には、1時間ごとに受信動作を行ない、その際、捕捉動作のみを行なってそれ以外の受信システムは休止状態とする。
また、受信状況がそれほど悪くはないが、正しいGPS時刻情報が得られるほど良くはない環境下では、4時間ごとに受信動作を行ない、捕捉動作に加えGPS時刻取得と内部時計との比較処理まで実施する。そのため、捕捉動作のみを行なう場合に比べて消費電力
が余計にかかるものの、正常に受信できれば直ちに時刻を修正することができる。
【0045】
受信環境が悪化しているときには、GPS時刻情報を正確に取得するのは難しいため、捕捉動作による相関値のチェックのみを行ない、かつ受信動作を頻繁に繰り返すことで、回復の機会を逃さないように監視し、受信環境が良くなってきたら、捕捉動作後にGPS時刻情報まで取得するようにして、時刻修正の機会を増やすことが可能となり、受信環境が良くない状態が長期にわたり継続したとしても、GPS時刻情報の取得が行なえないまま時刻修正が出来ずに内部時計がずれていってしまうのを防止するとともに、この間の受信動作にかかる消費電力を低減することが出来る。
【0046】
次に、第2の実施形態として、GPS信号のドップラ効果を利用した場合を説明する。
ドップラ効果によるGPS信号の受信周波数ずれ(ドップラシフト)については以下の通りである。
GPS衛星から送信されるGPS信号の周波数(送信周波数)は、すべての衛星で同じ周波数であることは説明した。但し、受信機における受信周波数は、受信機に対するGPS衛星の仰角によって変動する。これは、受信周波数にドップラ効果などが影響するためである。具体的には、受信機に対して天頂に位置するGPS衛星から信号を受信する場合、ドップラシフト(周波数ずれ)は0となり、送信周波数に対する受信周波数のずれ量も0となる。
【0047】
一方、ドップラシフトは、仰角が低いほど大きくなり、送信周波数からのずれ量が大きくなる。また、ドップラシフトは、GPS衛星が受信機に近づく方向に移動して向かってくる場合にはプラス方向(+)、つまり、周波数が高くなる方向に変化し、GPS衛星が受信機から遠ざかり地平線に向かって沈んでいく場合にマイナス方向(−)、つまり、周波数が低くなる方向に変化する。
GPS衛星が仰角0°〜仰角90°、天頂を通過してまた仰角が0°になるまで、ドップラシフトが(+)→(0)→(−)と連続的に変化していくため、これを検知すれば、おおよその衛星位置を把握して、次のGPS信号の受信時間を予め予測して行うことができる。
【0048】
図4は、本実施の形態を説明するフローチャートであり、GPS衛星が天頂方向へ移動しているか否かに基づいてGPS時刻情報の取得を継続するか否か判断する処理を含むアルゴリズムを示している。GPS衛星から送信された電波を受信した際の受信電波のドップラ周波数の偏差を計測し、その値が“0”に近いほど、GPS衛星は天頂に位置しているため受信しやすい。また、ドップラ周波数の周波数の偏移が増加か減少かによってGPS衛星が天頂に向かう方向か、天頂からずれる方向かを判別することができる。このように、GPS衛星の位置によって異なる周波数のGPS信号が得られることを利用して、GPS時計情報を取得する時期を予測し、最適な受信動作を行なうものである。
【0049】
以下、図4の各ステップに従って説明する。
ステップSA01において、内部時計の計時内容から活動時間帯にあるかどうか判定することで受信条件を満たしたか否か判断する。受信条件を満たしていなければ、再びステップSA01に戻り、受信条件を満たすまでこれを繰り返す。受信条件を満たすと、ステップSA02でGPS電波の受信を開始するため受信システムを起動し、その後ステップSA03に進んで相関演算のみを実行する捕捉動作を行う。ここまでの流れは、図3のフローチャートと同じであり、同一番号のステップは同じ処理を行なう。
【0050】
ステップSA04では、捕捉動作によって得られる相関値が予め設定された閾値以上か否か判断し、所定の閾値以上である場合にはドップラシフト量に応じた処理に進み、相関値が予め設定された閾値以上でない場合には、ステップSA10へ移行して、受信システ
ムの休止(SA10)、カウンタ1のカウント開始(SA11)、第1所定時間経過の判断(SA12)の後に、ステップSA01に戻る。
【0051】
ステップSA04.1では、受信したGPS信号の周波数ずれからドップラシフト量を算出して、(−)、(0)、(+)の周波数偏移に応じたGPS衛星の挙動を察知し、最適な処理を行なうものである。
ステップSA04.1において、ドップラシフト量が、マイナス(−)偏移の場合には、衛星が遠方に離れていくために受信状態が悪くなるものとして、当該衛星からのGPS時刻情報の取得は見送ってステップSA10に進み、受信システムの休止(SA10)、カウンタ1のカウント開始(SA11)、第1所定時間経過の判断(SA12)を経て、ステップSA01に戻る。
【0052】
また、ドップラシフトが無く(0)偏移の場合には、GPS衛星が天頂付近の最も受信に適した軌道上にあると判断できるため、ステップSA05に進み、GPS時刻情報を取得して内部時計の時刻修正を行なう。なお、ステップSA05以降の処理内容は、図3のステップSA05〜SA09、およびSA13〜SA16と同じであるので図4では略記したが、処理が完了するとステップSA01に戻り、受信条件が整うのを待って受信動作から繰り返す。
【0053】
一方、ドップラシフト量が(+)の場合には、GPS衛星が遠方より近づいてきていると考えられるため、ステップSA04.2で一旦受信システムを休止した後、ステップSA04.3でドップラシフト量から最適な受信時間までの時間を計算し、ステップSA04.4でカウンタ3のカウントを開始して、最適な受信時間になるまで待つ。ステップSA04.5において設定時間の経過を確認したら、一旦ステップSA01に戻って受信動作から行なう。このとき、GPS衛星は受信に最適な軌道上、つまり天頂上に到達しているはずであり、ステップSA04.1でのドップラシフト量の算出結果は(0)となってステップSA05へ進み、GPS時刻情報の取得および内部時計の時刻修正を行なった後にステップSA01に戻る。
【0054】
このように、ドップラシフト量に基づいてGPS衛星の軌道情報を得て、受信可否の判定条件に加えることで、さらに効率的かつ低消費電力で受信を行なうことが可能となる。
【0055】
次に、第3の実施形態として、次回のGPS衛星のサーチを行なう際に、GPS衛星の衛星番号、ドップラシフト量および相関値の算出結果を用いる場合について説明する。
衛星の捕捉動作により、SRAM506には衛星番号が記憶されており、時刻情報の取得は当該番号の衛星によって行なわれたものである。そのため、次回の受信動作における衛星のサーチでこの衛星番号を用いれば、短時間かつ低消費電力で確度の高い受信を行なうことが可能となる。
また、受信レベル監視手段で算出した相関値から、閾値の目安がわかるため、次回の受信動作で閾値設定の最適値が設定できるようになり、受信確度の向上に寄与することができる。
これら2つの記憶情報に加え、第2の実施形態で説明したドップラシフトの検出結果を利用することで、次回の受信動作を衛星からの信号を受信しやすい最適なタイミングで行なうことが可能となる。
【0056】
このことを、第2の実施形態の説明で用いた図4のフローチャートにて説明する。
ステップSA01で受信条件を満たしたと判断すると、ステップSA02で受信システムを起動し、SA03に進んで相関演算による捕捉動作を行なうが、捕捉動作が完了した時点で受信対象となる衛星が特定されるため、この衛星番号をSRAM506の記憶領域に保持する。
続くステップSA04で、この捕捉動作で得られた相関値が予め設定された閾値以上か否か判断し、所定の閾値以上である場合にはドップラシフト量に応じた処理に進むとともに、ステップSA03で得られた相関値、およびステップSA04で用いた閾値は、一時的にSRAM506の記憶領域に保持される。
ここで、相関値が予め設定された閾値以上でない場合には、ステップSA10へ移行して、受信システムの休止(SA10)、カウンタ1のカウント開始(SA11)、第1所定時間経過の判断(SA12)の後に、ステップSA01に戻る。
【0057】
ステップSA04.1でドップラシフト量を算出してから、その周波数偏移に応じたGPS衛星の挙動を察知し、続く処理を行なうまでの流れは、第2の実施形態で説明したとおりである。
この中で、ドップラシフトがプラス方向(+)、つまりGPS衛星が近づいてくる場合は、ステップSA04.2で受信システムを休止した後、ステップSA04.3およびステップSA04.4を経て、ステップSA04.5で最適な受信時間になるまで待ってからステップSA01に戻る。
【0058】
受信動作が完了し、ステップSA01に戻ったときには、衛星番号、相関値とその時に設定されていた閾値、ドップラシフトの検出結果といった、前回の受信動作で得られた各値を記憶した状態である。ステップSA01に戻り受信条件が満たされてステップSA02で受信システムを起動した後、ステップSA03で捕捉動作を行なう際に、前回取得して記憶してある衛星番号を用いる。
第1の実施形態で説明した捕捉動作は、衛星番号を1番から順次変更し、各衛星番号のGPS衛星をサーチし、その信号レベルを検出して相関値が最大となるものを特定するものであったが、現時点では、衛星番号を記憶したGPS衛星が受信に最適な軌道上、つまり天頂上に到達するはずであるので、当該衛星を用いて捕捉動作を行なう。
【0059】
これにより、捕捉動作に必要な相関値の算出の仕方を工夫できる。例えば、動作させる相関器の数を減らして、当該衛星番号に対応した最少1つのみ動作することで消費電力を低減でき、一方、全ての相関器を当該衛星の相関値算出にあてがうことにより、演算時間を短縮することができる。また、両者を併用することで、効率よく動作させることも可能となる。
あるいは、捕捉動作時の衛星番号の変更順序として、1番の衛星からではなく、当該衛星番号からサーチを開始するようにすれば、万が一、当該衛星を検出できなかったとしても、他の衛星をサーチするので問題の発生を抑えることができる。
【0060】
ステップSA03の捕捉動作によって相関値を得た後、ステップSA04で予め設定された閾値以上か否かを判断するが、前回算出した相関値およびその時に設定されていた閾値、およびドップラシフトの検出結果が記憶領域に保持されており、これらを関連付けたテーブルを作成しておくことで、相互の関係から最適な閾値の選択設定が可能となる。例えば、記憶保持した時点でのドップラシフト量と相関値との関係から、GPS衛星が受信に最適な軌道上に位置したときの相関値が、前回の相関値からどの程度大きくなるかテーブルを参照して予測値を拾い出し、これに合わせて閾値の設定をするようにすれば、受信レベルの監視において確度の高い判断を行なうことが可能となる。
【0061】
このように、受信動作の際に得られた各種値を記憶しておき、次回の受信動作で用いることにより、さらなる効率化および低消費電力化が図られる。
【符号の説明】
【0062】
500 GPS時計
501 アンテナ
502 アナログ信号処理回路
503 A/D変換器
504 ベースバンド回路
505 ROM
506 SRAM
507 CPU
508 内部時計
509 表示器
510 バス
511 ベースバンド部
512 制御装置
513 水晶発振器
521 受信条件判断手段
522 受信レベル監視手段
523 時刻情報修正手段
524 時間差判定手段
530 カウンタ
【特許請求の範囲】
【請求項1】
時刻を計時する内部時計と、
GPS衛星から送信されるGPS信号を受信し、該GPS信号に基づきGPS時刻情報を取得するGPS受信ユニットと、
該GPS受信ユニットで取得された前記GPS時刻情報に対応して、前記内部時計の計数する時刻を修正する演算装置と、
を備えたGPS時計において、
受信条件を満たすか否かを判断する受信条件判断手段と、
GPS信号の受信レベルを、捕捉動作において算出される相関値に基づいて監視する受信レベル監視手段と、
前記GPS時刻情報と前記内部時計の計数する時刻との時間差を算出して判断を下す時間差判定手段とを有し、
前記受信レベル監視手段により受信レベルが予め設定されたレベルに達しないと判断された場合には、前記GPS受信ユニットによるGPS信号の受信動作を休止し、第1所定時間経過した後に前記受信条件判断手段により受信条件を満たすか否かを判断し、
前記受信レベル監視手段により受信レベルが予め設定されたレベルに達したと判断された場合であって、前記時間差判定手段により時間差が指定時間以上と判断された場合には、受信システムを休止し、第2所定時間経過した後に前記受信条件判断手段により受信条件を満たすか否かを判断することを特徴とする時刻修正機能付きGPS時計。
【請求項2】
前記受信レベルが予め設定された値を超えた場合に、GPS電波のドップラシフトを検出し、該ドップラシフトに基づいて前記GPS受信ユニットによるGPS受信動作を休止することを特徴とする請求項1に記載の時刻修正機能付きGPS時計。
【請求項3】
前記受信レベル監視手段により受信レベルが予め設定されたレベルに達したと判断された場合に、前記GPS衛星の衛星番号を記憶し、次回のGPS衛星のサーチに該記憶された衛星番号、前記ドップラシフトの検出結果、および前記相関値の算出結果を用いることを特徴とする請求項2に記載の時刻修正機能付きGPS時計。
【請求項1】
時刻を計時する内部時計と、
GPS衛星から送信されるGPS信号を受信し、該GPS信号に基づきGPS時刻情報を取得するGPS受信ユニットと、
該GPS受信ユニットで取得された前記GPS時刻情報に対応して、前記内部時計の計数する時刻を修正する演算装置と、
を備えたGPS時計において、
受信条件を満たすか否かを判断する受信条件判断手段と、
GPS信号の受信レベルを、捕捉動作において算出される相関値に基づいて監視する受信レベル監視手段と、
前記GPS時刻情報と前記内部時計の計数する時刻との時間差を算出して判断を下す時間差判定手段とを有し、
前記受信レベル監視手段により受信レベルが予め設定されたレベルに達しないと判断された場合には、前記GPS受信ユニットによるGPS信号の受信動作を休止し、第1所定時間経過した後に前記受信条件判断手段により受信条件を満たすか否かを判断し、
前記受信レベル監視手段により受信レベルが予め設定されたレベルに達したと判断された場合であって、前記時間差判定手段により時間差が指定時間以上と判断された場合には、受信システムを休止し、第2所定時間経過した後に前記受信条件判断手段により受信条件を満たすか否かを判断することを特徴とする時刻修正機能付きGPS時計。
【請求項2】
前記受信レベルが予め設定された値を超えた場合に、GPS電波のドップラシフトを検出し、該ドップラシフトに基づいて前記GPS受信ユニットによるGPS受信動作を休止することを特徴とする請求項1に記載の時刻修正機能付きGPS時計。
【請求項3】
前記受信レベル監視手段により受信レベルが予め設定されたレベルに達したと判断された場合に、前記GPS衛星の衛星番号を記憶し、次回のGPS衛星のサーチに該記憶された衛星番号、前記ドップラシフトの検出結果、および前記相関値の算出結果を用いることを特徴とする請求項2に記載の時刻修正機能付きGPS時計。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−202814(P2012−202814A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−67518(P2011−67518)
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000001960)シチズンホールディングス株式会社 (1,939)
【出願人】(307023373)シチズン時計株式会社 (227)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000001960)シチズンホールディングス株式会社 (1,939)
【出願人】(307023373)シチズン時計株式会社 (227)
【Fターム(参考)】
[ Back to top ]