
時間基準システム
全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムは、複数の衛星から符号変調信号を受信し、かつ、ダウン・コンバートする衛星信号受信機と、各衛星の不完全な疑似距離の測定値を含む信号を提供するために、ダウン・コンバートされた信号をトラッキング及び復号化する相関器とを有する。システムのデータ処理部は、外部情報源から補助データを受信し、受信した衛星信号が搬送する低周波データ・ビット・ストリームのビット・エッジを識別するデータ・ビット同期を実行し、凡その時間基準を提供するために、予備的な位置−速度−時間の解を実行し、時間の曖昧性を解消するために、データ・ストリーム中の事前に選択したデータ列の自己相関を実行し、これにより、微弱受信信号条件下での正確な時間基準信号を計算する。事前に選択したデータ列は、データ・ストリームによって構成されるGPSの航法メッセージ中の反復データ・プリアンブルとすることができる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムに関する。本発明の主な用途は微弱信号環境下で正確な時間基準を取得することにある。
【背景技術】
【0002】
GPS(全地球測位システム)は計時目的で広く用いられている。通常、GPSタイミング受信機は通信システム、例えば携帯電話の基地局に時間基準を提供するのに使用される。この場合、時間基準には数ナノ秒の精度が求められる。一般的に、受信機でその様な精度を得るためには、上空に遮蔽物がないことが必要である。通信機器のように、屋内に設置して使用する際には、外部アンテナ、ケーブル、及び関連インタフェースの使用が必須となる。こうした構成の設置には多大な費用と時間を要し、例えばピコセル基地局の屋内設置の妨げとなっている。
【0003】
従来、GPSは、週時間(TOW)データ列を含む低周波衛星データ信号から時間基準を得ている。この信号は、送信データのフレーム構造を識別できる程度の粗い分解能を持つ。データ中のサブフレームのエッジを認識することで、より高い時間分解能が得られ、時間不確定性を6秒から20ミリ秒に低減できる。データ・ビットのエッジを検出して時間不確定性を20ミリ秒から1ミリ秒に低減し、内部符号基準を、送信された拡散符号に合わせ、その位相を測定することにより、時間不確定性をさらに1マイクロ秒より小さくできることも知られている。GPS衛星群の複数の衛星から受信機への信号送信で生じる信号遅延時間を考慮すると、測位エンジン(例えば、カルマン・フィルタ)が位置、時間及び速度(PTV)解を収束させるまでは、補正されない誤差を含む点で、実際のところ、この測定は疑似距離測定と似ている。
【0004】
閉じられた空間、例えばビルの谷間若しくはビルの内部等で生じ得る微弱信号条件下では、衛星信号が弱すぎてデータ・ストリームを復号化できないので、上記の方法は使用できない。必要な衛星のエフェメリス及びクロック補正を含むデータを復号化できないという問題は、通信リンクを介して受信機に同じ情報を送信することで解決できる。しかし、一般的に、この様な方法では正確な時間基準を送信できず、通常は、良くても1秒オーダの粗い時間基準が得られるにすぎない。これは、受信機が上空の衛星位置の最初の推定値を確立するには十分だが、正確な位置を求めるには低すぎる。結果的に、微弱信号条件下で使用されるGPS受信機は、より正確な時間基準を取得するためにさらなる処理を実施する必要がある。
【0005】
PVTの計算は、異なる衛星からの連続した到着時間測定値のデータを含む一連の数式を解くことを含む。この計算にはカルマン・フィルタの使用が有効で、十分な時間があれば、正確な位置を導出できる。カルマン・フィルタは、SV(空間飛行体)の初期位置と、ドップラー・シフトと、経時移動とを整合させて単一で矛盾のない集合にすることで、視野内の各衛星について生じる曖昧さを解決する。しかし、絶対時間は未解決のままであり、その不確定性は±30ミリ秒以上のオーダとなる。こうした不正確さは、信号レベルだけでなく、マルチパス効果やその他の種類の干渉を含む多くの現象に依存している。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、微弱信号状態において基準時間を提供し、遮蔽物のない空でのアンテナ使用の必要性をなくすことを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様によれば、全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムであって、複数の衛星からの符号変調信号を受信し、ダウン・コンバートする無線周波数部、及び、各衛星の不完全な疑似距離の測定値を含む信号を提供するために、ダウン・コンバートした衛星信号を受信し、トラッキングし、復号化する相関器を有する衛星信号受信機と、受信してダウン・コンバートした衛星信号及び不完全な疑似距離の測定値を含む信号のほかに、情報源から補助データを含む信号を受信し、受信した衛星信号が搬送する低周波データ・ビット・ストリームのビット・エッジを識別するデータ・ビット同期を実行し、時間曖昧性を解消するために、低周波データ・ストリーム中の事前に選択したデータ列の相関を実行し、補助データ、衛星信号受信機からの不完全な疑似距離の測定値及び符号トラッキング出力、データ・ビット同期、及び、データ列との相関に基づいて時間基準信号を計算するように構成されたデータ処理部とを備えている。
【0008】
補助データは、一般的に、例えば、通信ネットワークからデータ処理部に供給され得る衛星のエフェメリス及び/又はアルマナック情報を含み、補助データは、遠隔に配置された高強度信号環境下の衛星信号受信機を用いて別の場所で生成されたものである。
【0009】
このシステムは、少なくとも部分的に衛星信号受信機に含まれ、衛星の移動によって生じるドップラー・シフトを示すドップラー・シフト信号を生成するように動作可能な周波数・ロック・ループを含むことが望ましく、システムの処理部は、ドップラー・シフト信号に応答してデータ・ビット同期を修正する様に構成される。したがって、任意の周波数オフセットを補正するために、好ましくは、データ処理部に、フィードバック・ループを採用してデータ・ビット同期の精度を向上する。
【0010】
データ処理部は、不完全な疑似距離の測定値と、好ましくは、ドップラー測定とから生成される位置−速度−時間の推定値を用いて、一般的に、低周波データ・ストリームの1から5データ・ビットの期間に等しい時間不確定性を有する予備的な時間解を提供するように構成されることが望ましい。曖昧性解消アルゴリズムは、測定値及び補助データに最も適合させるために使用される。データ・ビット同期と、受信機が信号を受信する衛星より選択した1つの衛星からの信号における事前に選択したデータ列の相関との結果を用いて、中間的な曖昧性解消と時間解の調整を行っても良い。時間基準信号を生成するために、符号トラッキング出力に応答して時間解のさらなる調整を行うことが望ましい。
【0011】
事前に選択したデータ列は反復データ・パターンを含む。GPSの場合、低周波データ・ストリームのデータ・ビット・プリアンブル列は、その様なパターンである。この場合、データ処理部は、データ列の相関が、受信機が信号を受信する衛星の少なくとも1つから受信した信号におけるデータ・ストリーム中の反復データ・パターンと、期待するデータ・パターンを有する信号との、連続する時間における相関を含む様に構成される。或いは、データ列は、相関を実行中に選択される。換言すれば、選択はリアルタイムで生じる動的処理でも良い。こうした選択は、補助データを用いても良いし、以前に受信したデータ列又は補助データに基づく予測処理によって行われても良い。データ処理部は、こうした場合に潜在的なデータ列のデータ・パターンの自己相関を実行する様に構成されても良く、選択は、平均値又は二番目の値に対する自己相関の最大値の品質に基づいて行われる。いずれの場合も、データ・ストリームにおける入力データの相関はコヒーレント積分及びインコヒーレント積分との組み合わせによって行うことができる。
【0012】
一般的に、周波数ロック・ループを使用してデータ・ビット同期の精度を高める場合、良くとも±11ミリ秒(通常は、良くとも±15ミリ秒)の時間精度を持つ予備的なPVT解が提供されるにすぎず、解は複数の疑似距離時間解オプションの形式であり、その1つは±3ミリ秒より良い精度を有する。最高精度の時間解オプションを識別するための相関は、周波数ロック・ループの周波数安定性の逆数以下の間隔に渡るコヒーレント積分を用いて行う事前に選択したデータ列の相関を含んでも良い。最高精度の時間解オプションの選択は、より長い時間に渡る、上記コヒーレント積分の結果のインコヒーレント積分を含んでも良い。周波数ロック・ループの周波数安定性が低い場合、GPSプリアンブルより短い反復データ列を用いてもよい。或いは、差分復調相関を用いることで、航法データではなく、データ・ストリームの連続ビットの差分復調をマッチング対象のパターンとしてもよく、この場合、(周波数安定性の逆数より)長いデータ・ビット列を用いて良い。
【0013】
非反復データ列を用いる場合、事前の選択は、相関に適したデータ列の決定を含む(すなわち、反復するデータ列においてデータ値が変化しない、或いは、例えば、反復するデータ列においてデータ値が単純に高低を繰り返すようなデータ列を回避する)。
【0014】
パターン・マッチングには16ビット以下のデータ列を用いることが望ましく、8ビット以下のシーケンスが最も望ましい。
【0015】
本発明の第2の態様によれば、全地球的航法衛星群によって生成された信号から時間基準信号を生成する方法であって、複数の受信機出力信号を生成するために、衛星群の複数の衛星から送信された信号を受信し、ダウン・コンバートし、トラッキングするステップと、直接受信した衛星信号のほかに情報源から補助データを受信するステップと、受信機出力信号及び補助データから予備的な時間解を示す信号を生成し、予備的な時間解における時間の曖昧性を解消するために、少なくとも1つの衛星が送信した信号が搬送するデータ・ストリーム中の事前に選択したデータ列の相関を取り、これにより±1ミリ秒より高い精度で時間を表す時間基準信号を生成するステップと、を含む方法が提供される。
【0016】
本発明の第3の態様によれば、全地球的航法衛星群によって生成された信号から時間基準信号を生成する方法であって、複数の受信機出力信号を生成するために、衛星群の複数の衛星から送信された信号を受信し、ダウン・コンバートし、トラッキングするステップと、直接受信した衛星信号のほかに情報源から補助データを受信するステップと、受信機出力信号及び補助データから予備的な時間解を示す信号を生成し、少なくとも1つの衛星が送信した信号が搬送するデータ・ストリームのビット・エッジを識別するデータ・ビット同期を実行するステップと、を含み、データ・ビット同期は、受信データ・ストリームのサンプルの周波数シフト補正積分の実行を含み、これにより、受信データ・ストリームのデータ速度のシフト、例えばドップラー・シフトを補正する方法が提供される。
【0017】
以下に、添付の図面を参照し、例を用いて本発明を説明する。
【図面の簡単な説明】
【0018】
【図1】本発明による時間基準システムを示すブロック図。
【図2】GPS信号を示す波形図。
【図3】GPS信号が搬送する低周波データ・ストリームのデータ・フォーマットを示す図。
【図4】本発明による正確な時間解を生成する方法を示すフローチャート。
【図5】図4のフローチャートの一部であるパターン・マッチング処理を示すフローチャート。
【図6】GPSプリアンブルを含む低周波データ・ストリームの一部を示す図。
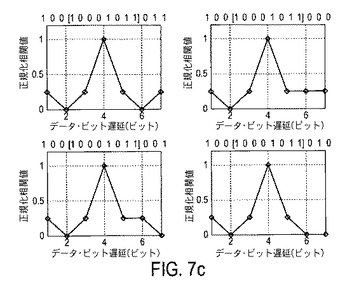
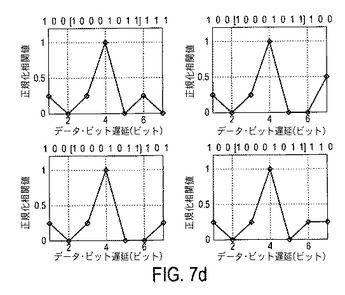
【図7a】異なるビット値が前後に存在するGPSプリアンブルの自己相関特性を示す相関図。
【図7b】異なるビット値が前後に存在するGPSプリアンブルの自己相関特性を示す相関図。
【図7c】異なるビット値が前後に存在するGPSプリアンブルの自己相関特性を示す相関図。
【図7d】異なるビット値が前後に存在するGPSプリアンブルの自己相関特性を示す相関図。
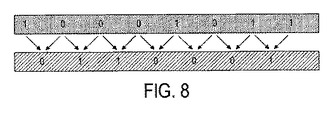
【図8】GPSプリアンブル列の差分相関を示す図。
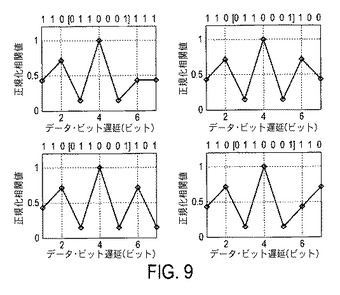
【図9】異なるデータ・ビット値が前後に存在する差分復調されたGPSプリアンブルの自己相関特性を示す図。
【図10】GPSプリアンブル列の中央部分の自己相関特性を示す相関図。
【図11】入力信号レベル−155dBmのパターン・マッチングにかかる時間を示す図。
【図12】GPSシミュレータを使用し、ナビゲーション解とPPSオフセットとによって推定した時間誤差を示す図。
【図13】図12に示す時間誤差を求めたナビゲーション解で使用した衛星の数を示す図。
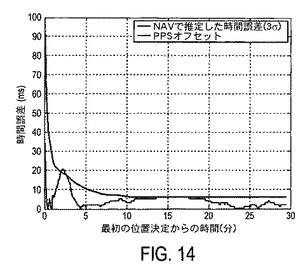
【図14】GPS信号シミュレータの代わりに室内アンテナを使用して得た図12及び図13にそれぞれ対応する時間誤差及び衛星の数を示す図。
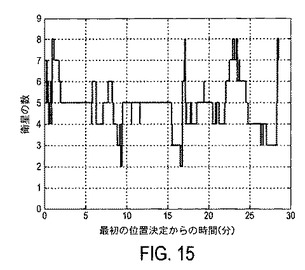
【図15】GPS信号シミュレータの代わりに室内アンテナを使用して得た図12及び図13にそれぞれ対応する時間誤差及び衛星の数を示す図。
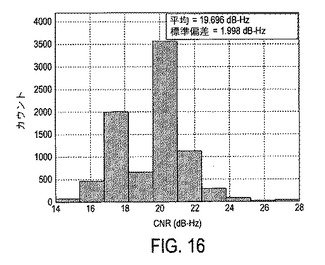
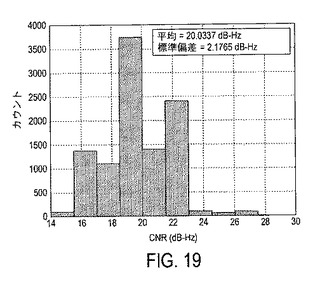
【図16】室内アンテナを使用した際の衛星の搬送波対雑音比(CNR)を示す図。
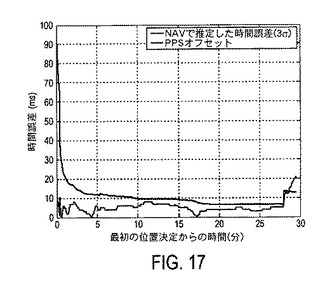
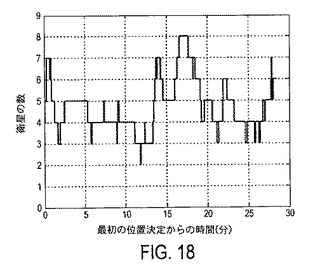
【図17】別の室内アンテナを使用した際の図12及び図13にそれぞれ対応する図。
【図18】別の室内アンテナを使用した際の図12及び図13にそれぞれ対応する図。
【図19】第2の室内アンテナを使用して得たCNRを示す図。
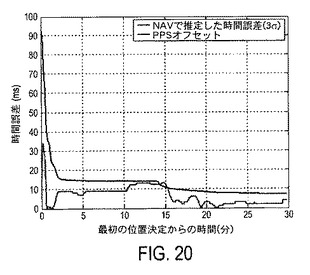
【図20】減衰型屋上アンテナを使用して得た図12及び図13にそれぞれ対応する時間誤差及び衛星の数を示す図。
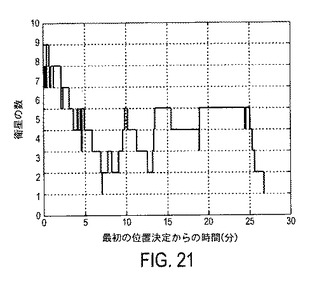
【図21】減衰型屋上アンテナを使用して得た図12及び図13にそれぞれ対応する時間誤差及び衛星の数を示す図。
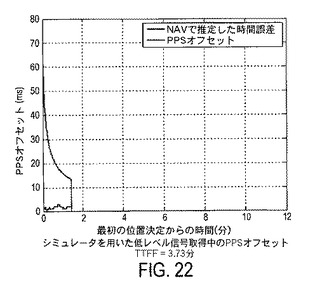
【図22】GPS信号シミュレータによる低周波信号を取得した際の図12及び図13に対応する図。
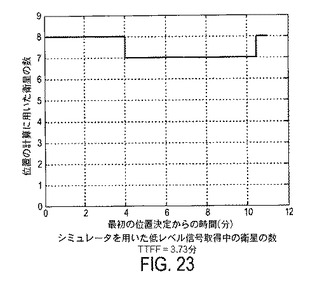
【図23】GPS信号シミュレータによる低周波信号を取得した際の図12及び図13に対応する図。
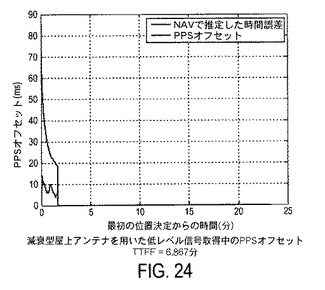
【図24】減衰型屋上アンテナから低周波信号を取得した際の図12及び図13に対応する図。
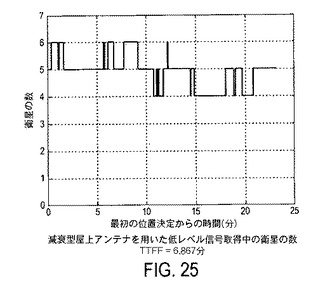
【図25】減衰型屋上アンテナから低周波信号を取得した際の図12及び図13に対応する図。
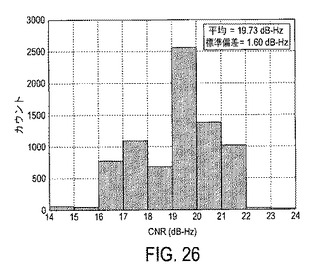
【図26】減衰型屋上アンテナを使用した際の衛星のCNRを示す図。
【発明を実施するための形態】
【0019】
室内環境においては、衛星とユーザ間の見通し信号が弱く、或いは、著しく減衰していることが多く、室内の受信機は、室内に一般的に存在する情報源からの干渉に影響されやすく、正確な時間の転送及び正確な同期アプリケーションを有効に利用できないため、室内環境はGPSの運用には問題の多い領域である。さらに、多くのマルチパス信号の存在により計時精度が低下する。
【0020】
GPS計時性能は、通常、受信機のナビゲーション・データの復調能力により制約を受け、計時の不確定性をミリ秒まで低減する性能は、約−145dBm未満の信号レベルで正確なミリ秒を識別して決定する能力により制約を受ける。この処理時点においては、信号レベルが低すぎてデータ・ビット間の位相反転箇所を特定できず、よって、データ・ビットを特定できないため、受信機は、データ・ビット・エッジを非同期に積分する必要があるかもしれないからである。しかし、A−GPSリンク経由で受信機に補助データを提供できる。一旦、位置が確定すれば、GPS時間とローカル時間との間のオフセットは、ナビゲーション解によって収束され得るが、この分解能では、低信号レベルで正確なミリ秒の同期は行えない。衛星の数が4基より多ければ、ナビゲーション解は、およそ±50ミリ秒の精度の時間を確立できる。この数値は信号条件に依存し、以下では数回の実地試験の結果に基づいて説明する。
【0021】
理想的には、ナビゲーション解がおよそ±10ミリ秒の時間に収束できれば、ビット同期アルゴリズムがビットの遷移を検出し、ミリ秒の曖昧性を解消できる。しかし、30〜50ミリ秒の時間不確定性が存在する場合、ビット同期アルゴリズムはミリ秒の曖昧性を解消できるが、依然として20ミリ秒の不確定性が残る。
【0022】
本発明によれば、ナビゲーション解を用いて時間の分解能を約30〜50ミリ秒に改善し、1ミリ秒のビット同期を確立し、20ミリ秒の曖昧性を解消し、これにより正確な時間を得る。時間の不確定性を排除するために、本発明の好適な一実施形態において提案されるアルゴリズムは、GPSデータ・プリアンブルの反復構造を利用して、20ミリ秒の曖昧性を解消する。以下に述べるように、GPSプリアンブルは、要求される時間不確定性に対して良好な自己相関特性を有する。自己相関特性を利用して20ミリ秒の曖昧性を解消するその他のアルゴリズムを開示して比較する。
【0023】
基準ネットワークが航法メッセージ、初期位置、及び時間推定値に関する支援を行う支援型GPS等、室内でのGPSアプリケーションの性能を改善するために、ここ数年間で種々の技術が導入されてきた。これによりGPS受信機は、受信機内でのコヒーレント積分期間を延ばすことができ、感度を増強できた。しかし、コヒーレント積分期間の残余周波数誤差と、航法データ・ビットにより、コヒーレント積分時間は20ミリ秒が限度となっている。残余周波数誤差は、衛星の動き、受信機のクロックの不安定性、及びユーザの動きに由来するドップラー効果によって生じる。従来のGPS受信機は、一般的に、最長20ミリ秒のコヒーレント期間より短い積分期間を使用するため、その動作環境は、強い信号(−145dBmを超える信号)が存在する範囲内に限定されている。
【0024】
本発明による好適な時間基準システムは、ICチップとしてSTエリクソン社製GNS4540を使用している。
【0025】
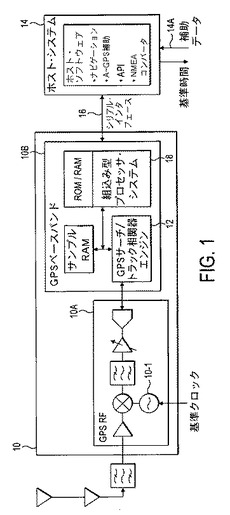
GNS4540は、L1信号用GPS受信機の高性能シングル・チップであり、ベースバンド信号処理を提供する。DSPは、GPS捕捉及びトラッキングを制御するファームウェアを含み、ナビゲーションの解決は、組込み型システム上のプロセッサ又はPCのプロセッサであり得る、ホスト・プロセッサで実行する。図1は、受信機チップ及びホスト・プロセッサのブロック図である。このシステムは、補助データを使用し、データ・ビットを長時間に渡りインコヒーレントに積分することで、全体的な受信信号感度を強化し、これにより、信号捕捉性能を向上させることで、ビルの内部や、所謂アーバンキャニオン等、信号レベルが微弱な厳しい環境下での信号処理を可能とし、室内環境においてさえ高性能測位を可能にしている。
【0026】
従来の衛星信号受信機と同様、GNS4540受信機チップ10は、複数の衛星からの符号変調信号を受信し、ダウン・コンバートする無線周波数部10Aと、ダウン・コンバートされた衛星信号を受信し、トラッキングし、復号化することで各衛星の不完全な(partial:或いは、部分的な)疑似距離の測定値を含む信号を提供する相関器エンジン12を含むベースバンド部10Bとを有する衛星信号受信機を備えている。データ処理ホスト・システム14は、補助データ・ポート14A経由で、通信ネットワーク等の外部情報源から補助データを含む信号を受信し、シリアル・インターフェス・リンク16経由で不完全な疑似距離の測定値を含む信号を受信する様に構成される。
【0027】
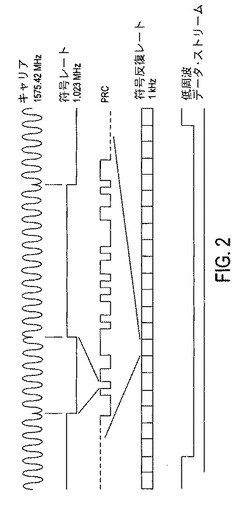
“疑似距離”とは、衛星と受信機間の信号パスの遅延時間の推定値のことである。このパスの遅延は、一般に70ミリ秒のオーダである。GPS信号を図2の波形図に示す。1575.42MHzのL1キャリアは、基本符号レート1.023MHzの疑似ランダム拡散符号で変調される。各チップは1540のキャリア・サイクルを含む。疑似ランダム符号(PRC)は、1023チップ(すなわち、1ミリ秒)の長さを有する。符号は1kHzで繰り返される。信号は、データ・ストリームを用いて、これよりはるかに低い周波数で変調される。この低周波数すなわちデータ・レートは50Hzであり、これは、データ・ストリーム1ビットは、20ミリ秒の長さを持つことを意味する。拡散符号(PRC)は1ミリ秒ごとに繰り返され、符号との同期で疑似距離の小数部が与えられる(ミリ秒単位)。疑似距離のミリ秒の整数部分は、他の手段で推定され、従来は使用する各衛星におけるデータ構造を復号化することで推定していた。
【0028】
受信機10は、入力キャリアに同期する局部発振器10−1を含む周波数ロック・ループ(FLL)を備えている。相関器エンジン12は、疑似ランダム符号(PRC)と同期し、曖昧性1ミリ秒で1マイクロ秒未満の分解能を生成する符号ループを含む。したがって、組込み型プロセッサ・サブシステム18又はホスト・システム14は、データを復号化できたか否かにかかわらず、50Hz低周波GPS航法メッセージ・データ・ストリームのデータ・ビット遷移に同期できる。これにより曖昧性20ミリ秒で1ミリ秒未満の分解能が得られる。
【0029】
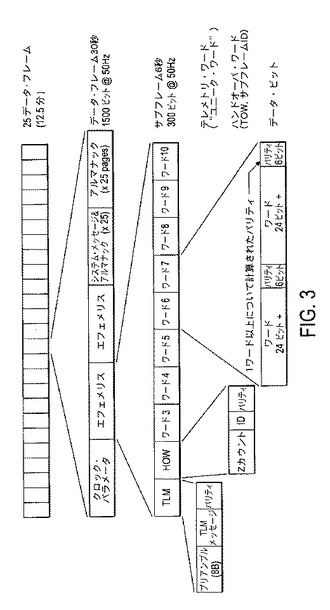
図3において、GPSデータ信号によって表されるデータ・ストリームは、25個のデータ・フレームを含み、全体で12.5分の長さを持つ(25個のフレームは12.5分毎に繰り返される)。図3に示す様に、各データ・フレームは30秒の長さを有し、50Hzのデータ・レートで1500データ・ビットを含む。各フレームは、クロック・パラメータと、エフェメリス(2つのサブフレーム)と、システム・メッセージ及びアルマナックを含むサブフレーム(サブフレーム4)と、更なるアルマナック(サブフレーム5)とに関するデータを含む5つのサブフレームを含む。各サブフレーム4は、合計25ページからなるシステム・メッセージ及びアルマナックの内の1ページを含み、後続の30秒データ・フレームには25ページの内の後続のページが含まれる。同じく、後続の30秒データ・フレームには、サブフレーム5における25ページからなるアルマナックの後続のページが含まれる。同図に示すとおり、各サブフレームは6秒の長さを有し、50Hzのデータ・ストリームの300ビットを、10のデータ・ワードに分割して含んでいる(図3で、“TLM”は、テレメトリー・ワード(“ユニーク・ワード”)を意味し、“HOW”は、週時間(TOW)及びサブフレームID(識別子)を含む、所謂ハンドオーバー・ワードを意味する)。各ワードは24以上のデータ・ビットと6パリティ・ビットからなる(パリティは1ワード以上で計算される)。
【0030】
信号強度が十分なときは、サブフレーム同期はホスト・システム14(図1)がデータを復号化することで行われ、6秒の曖昧性で20ミリ秒未満の分解能が得られる。サブフレームのデータを復号化することで、1.5秒単位での週時間(TOW)及び週番号が得られる。
【0031】
エフェメリス/軌道及びクロック・パラメータ等の付加データは、上述したように、複数のサブフレームに分散される。
【0032】
従来のGPS受信機は、GPS信号の航法メッセージに含まれるTOWデータを読み出すことで、衛星の送信に関連する絶対時間を判定する。TOWカウントは、6秒ごとに航法メッセージ・データ・ストリームで報告され、現在のGPS週開始以来の経過時間を与える。
【0033】
50Hzのデータ・ストリームを、1ミリ秒のGPSのC/A符号の遷移に合わせ、データ・ビット・エッジの到着時間(20ミリ秒間隔)によって絶対送信時間を、最も近い20ミリ秒に決定する。C/A符号は、1ミリ秒毎に繰り返されるため、GPS時間1ミリ秒毎に不定となる。ビット境界に正確に同期することで、絶対遷移時間を1ミリ秒以下に特定できる。GPS航法メッセージは、システム時間、衛星エフェメリス及びアルマナック情報を含んでいる。
【0034】
GPS受信機においては、衛星が4つ以上存在し、少なくとも4つの異なる衛星からの到着時間(ToA)の測定値が得られ、有効な衛星軌道データが受信される場合、ナビゲーション解が時間を特定すると、復調された衛星データ・ストリーム、データ・サブフレーム、データ・ビット同期(ミリ秒単位)及び符号チップ・カウントと符号位相(サブミリ秒、例えば50ナノ秒)との組み合わせから時間を回復できる。
【0035】
信号レベルが高ければ(−145dBmより高い場合)、データ・ビット・エッジを検出可能であり、キャリア・トラッキングからデータ・ビットが得られ、サブフレーム同期を確立できる。そしてGPSデータ・ストリームと、サブミリ秒単位で検出可能なビット・エッジから時間を確立する。
【0036】
計時性能は、−145dBmより低い信号レベルにおいて正しいデータを解決する受信機の能力によって制約を受ける。受信機は受信信号から航法データを抽出できず、受信機は入力ビット、ワード又はサブフレームに同期できないので、有効な衛星軌道情報を得るためには外部ソースからの補助データが必要である。位置が決定されれば、GPS時間とローカル時間との間のオフセットは、ナビゲーション解によって±50ミリ秒より良好な値に収束され得るが、この分解能では低信号レベルでのミリ秒単位での正確な同期は行えない。
【0037】
積分時間が20ミリ秒に達せずビット・エッジが“ぼやける”中間レベルの信号(−145dBmから−150dBm)については、受信機はトラッキングした衛星毎に、ビット同期アキュムレータを起動してデータ・ビット・エッジを探索する。ここで用いられるビット同期アルゴリズムは、受信したGPS信号からタイミング情報を抽出する遷移検出法である。データ・ビット当たり、1ミリ秒のエポック期間のC/A符号が20個存在し、ビット・エッジはC/A符号の先頭に合わせるため、ビット同期アルゴリズムは、想定したデータ・ビット期間を20個の1ミリ秒のタイム・スロットに分割する。検出する位相反転は、検出箇所である1ミリ秒のタイム・スロットに従って適切な積分スロットに付加される。時間の経過とともに、これらのスロットの1つが積算されて他のスロットより高レベルとなり、閾値メカニズムによって正しいミリ秒が検出される。積分期間を長くすれば、ビット遷移の生起数も増加するため、データ・ビット遷移を正しく検出できる確率が高くなる。また、積分期間を長くすれば、雑音余裕度を改善できる。したがって、微弱信号環境においては、ビット同期アルゴリズムの積分期間を長くとることが可能であり、3秒を超える補助があれば、1回のサブフレーム復号化で正確な時間を確立できる。これは、データ復号化を連続してエラー無しで行えるレベル、例えば−150dBmより若干低いレベルで達成できる。
【0038】
これより低いレベル(−150dBm未満)では、信号から符号位相のみを抽出できる。したがって、中間レベルの信号に用いられたのと同様のビット同期メカニズムが適用される。しかし、微弱信号に必要な積分期間と、クロック・オフセット、衛星の動き及び例えばユーザの動きに由来するドップラー効果によって生じる信号の強弱とに起因して、ビット・エッジがタイム・スロット間で傾斜する。結果的に、このビット同期法で正しいミリ秒のスロットを検出できる確率が低下する。データ・エッジが位置するいくつかの隣接するミリ秒区間を検出することが可能であり、これを“近似ミリ秒同期”と呼ぶものとする。これは、ナビゲーション解のために用いるには十分だが、計時には不十分である。したがって、サブミリ秒の時間分解能が得られれば高精度計時が可能となるが、一方でN×1ミリ秒のオフセットが問題となる。
【0039】
データ・ビット同期はGPS受信機10の組込み型プロセッサ・システム18で実施される。受信信号のレベルが低い場合、データ・ストリームの復号化はできないものの、データ・ビット同期を行うことは可能である。
【0040】
微弱信号環境にビット同期アルゴリズムを適用するために、ビット同期における積分期間を延長することで、拒絶率を増加させることなしにビット遷移の検出能力を改善できる。
【0041】
最大エネルギーを持つタイム・スロットに対する2番目に大きいエネルギーを持つタイム・スロットの比率が、所定の閾値より大きくなる様にする閾値手法を用いることで、閾値ビット同期アルゴリズムを改良する。したがって、比率が閾値より小さければ、決定はなされず、ビット同期アルゴリズムは再初期化される。信号が微弱な場合、或いは、積分期間中の受信信号のデータ・ビット遷移が不足している場合、特に、この手法によってビット同期アルゴリズムのロバスト性を改善できる。
【0042】
微弱信号において正しいミリ秒スロットを検出する確率を最大とし、ビット同期の誤り率とビット遷移を検出するのに必要な時間との最良のトレードオフを可能にする様に、閾値を選択する。閾値は、信号強度、積分期間の長さ、及び、所望の誤り率の関数である。検出閾値が大きすぎる場合、微弱信号レベルでのビット遷移検出確率は低下し、ビット遷移検出時間の増大を招く。一方で、閾値が小さすぎる場合には、誤検出が生じ、正しいミリ秒スロットを発見できる確率が低下する。
【0043】
上述した様に、正しいビット・エッジを有するタイム・スロットが検出閾値を超えるのに要する積分期間が長くなることから、GPS信号中のドリフト及びドップラー・シフトにより生ずる周波数オフセットにより、隣接するタイム・スロット間でビット・エッジが傾斜するため、微弱信号中のデータ・ビット遷移を正しく検出できる確率は低下する。
【0044】
周波数オフセットを補正するために、フィードバック・ループを採用することで、長い積分期間におけるビット同期推定値の精度を向上する。例えば、ロ−カル受信機クロックによって計時された50Hzのデータ・レートのデータ・ストリームのドップラー・シフトをこのように補正することが可能となる。
【0045】
周波数補正機能は、組込み型プロセッサ・サブシステム18(図1)を使用して、いくつかの方法によって実現できる。第1の方法は、ビット同期プロセスをビット位置及び周波数の2次元探索に拡張することを含む。この手法では、ビット同期アルゴリズムによって、複数の周波数オフセットの異なるビット位置候補に対して、20個のタイム・スロットを計算する。最大エネルギーを持つタイム・スロットは、データ・ビット位置に正確に沿って積分されたタイム・スロットである。その周波数ビンからの20個のタイム・スロットを、各ビット位置の推定値を評価するのに使用する。しかし、この手法では計算にかかるコストが高くなる。
【0046】
第2の手法は、ビット同期アルゴリズムの補助に周波数トラッキング・ループを用いることで、衛星ダイナミクスの差及び変化による隣接タイム・スロット間のビット・エッジの傾斜を防止する。
【0047】
第3の方法は、20ミリ秒の積算に基づいて微弱信号中のデータ・ビット遷移を正しく検出する確率を高める。しかし、この手法はメモリ条件が厳しくなる。
【0048】
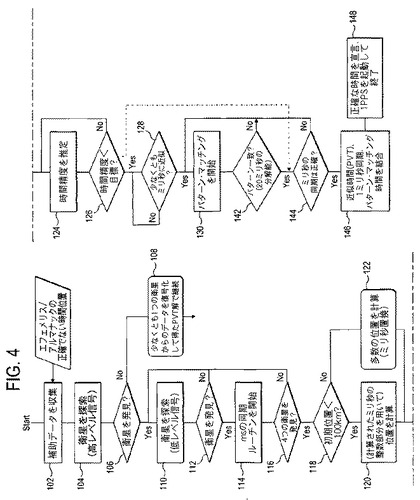
図4は、図1で説明した時間基準システムの組込み型プロセッサ・サブシステム18とホストデータ処理システム14とによって実行されるソフトウェア工程を示すフローチャートである。最初に、ホスト・システムは補助データ・ポート14A(図1)を介して、エフェメリス及びアルマナック情報と、大まかな時間値とを提供する補助データを収集する(ステップ102)。整数値で1ミリ秒の疑似距離の分解能を得るために、補助位置データは100kmより小さいことが望ましい。
【0049】
次に、高い信号レベルのSV(空間飛行体)を探索する(ステップ104)。SVが発見されたならば、少なくとも1つのSVからのデータ・ストリームを復号化することで、位置、時間及び速度(PTV)の解を求める(ステップ106及び108)。高強度信号が発見できなければ、組込み型プロセッサ・サブシステムによって、上述した低レベル信号探索が行われる(ステップ110)。SVが発見されるたびに(ステップ112)、上述したビット同期ルーチンが開始される(ステップ114)。近似同期を用いてコヒーレント積分を調整することで感度を向上することもできる。4つのSVが発見されれば(ステップ116)、信号が微弱でも(ステップ116及び118)、最初の位置−速度−時間(PVT)を取得できる。位置は、計算によって求められた整数値のミリ秒(ステップ120)、或いは、初期位置が100km以内にあると認識されたか否かに依存する付加的な曖昧性の分解能(ステップ120)で与えられる。
【0050】
要約すると、上記の工程によって極めて微弱な信号環境下でデータ・ビット遷移を正しく検出できる確率が高まる。
【0051】
受信機がビット遷移を検出した後、受信機は、航法メッセージの復調を開始し、メッセージが受信信号のどこに存在するかを確認する。しかし、受信信号が非常に弱い場合、データ・ビット間の位相反転を検出するのが困難であり、受信したGPS信号を確実に復調することができないため、ナビゲーション解によって確立された±50ミリ秒の分解能に対して20ミリ秒の曖昧さが残る。20ミリ秒のデータ・ビットの積分と、位置については十分高い精度であるが、計時には不十分である。
【0052】
次に受信機は、受信した衛星信号の低周波データ・ストリーム中で事前に選択したデータ列のパターン・マッチングを含む処理を実行し、この様なデータ列の一例が、データ・ストリームの各サブフレームの先頭に出現する8ビットのGPSデータ・プリアンブルである(図3参照)。しかし、反復する、或いは、反復しないデータ列を使用可能である。パターン・マッチングによって、上述した20ミリ秒の曖昧性が解消される。微弱信号条件下では衛星データ自体を復号化できないが、選択したデータ列による、異なる相関方法を用いてこの処理を行うことができる。
【0053】
図4に戻り、ホスト・システム14は、まず、上述したビット同期処理の後に得られる予備的な時間の精度を推定する(ステップ124)。この精度の推定値は、1つ以上の選択されたデータ列のパターン長に基づいて設定された目標時間精度と比較される(ステップ126)。目標時間精度は、良好な相関判定を得るために、予め決められた自己相関関数限界の範囲より小さくなるように設定される。推定した時間の精度が目標より低ければ、組込み型プロセッサ・サブシステムは、ビット同期処理により、少なくともおおよそのデータ・ビット位置を得たか否かのチェックを経て、パターン・マッチングに進む(ステップ130及び図5)。
【0054】
位相同期ループ(PPL)の動作がない場合(低信号レベルの場合)には、事前に選択したデータ列を相関する、長期間のコヒーレント積分を行えない。しかし、位置解決ステップ120又は122で得た予備的な位置により、時間不確定性は、ごく少数(例えば、3〜5)の不定時間オプションに局所化できる。これは、図3からわかるように、各サブフレームに出現するデータ列は6秒ごとに出現するものであり、受信機でそれまでに行われた処理で生じた時間不確定性内において、適切なサブフレームの配置は、ごく少数しか存在しない(この不確定性は±50ミリ秒に達することもあるが、一般には±30ミリ秒である)からである。
【0055】
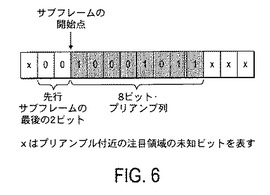
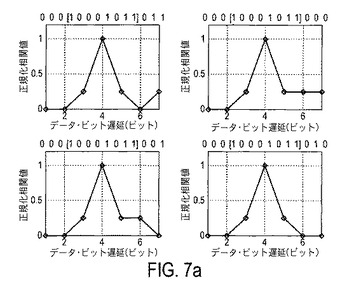
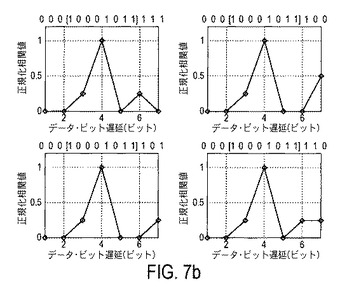
データ・ビット・エッジとの同期がすでになされているので、曖昧な分解能の問題は、この小さな曖昧性の解消に軽減される。図6に示す8データ・ビット同期又は衛星データのプリアンブル列は、図7a〜図7dに示す様に、±3データ・ビットに渡り良好な自己相関特性を有しており、位置が正しく合っていないとき、信号データの未知の状態を許容する。図6からわかるように、8ビットのプリアンブル列は、ビット10001011を含む。先行するサブフレームの最後の2ビットは00である。“x”で示すビットは、プリアンブル付近の注目領域における未知ビットである。図7a〜図7dは、ノイズが存在しない場合における、事前に選択したプリアンブル列の自己相関によって得られた正規化相関値を示す。事前に選択したデータ・ビットのプリアンブル列前後のビットが異なるデータ値を含む場合の、位置が合った状態と合っていない状態の入力及び基準列についての値を示している。位置が合っている場合(アライメント)に生じる正規化相関値のピークは、±1、2又は3データ・ビットのずれがある場合に得られる値の少なくとも2倍であり、このデータ列は良好な自己相関特性を有することがわかる。相関マージン、即ち、位置が合っているときの正規化相関値と、合っていない時(ミスアライメント)の値との比は、少なくとも2:1であり、1又は2ビットのずれの場合は、4:1以下となる。一般的に、±2.5ビットのずれに対して2:1のマージンがあれば良好な結果が得られるが、より小さいマージンでもかまわない。
【0056】
好適な受信機においては、期待される周波数精度に対応した短い間隔に渡る、時間解のオプションのそれぞれについてのコヒーレント積分を利用した直接相関によってパターン・マッチングを実行する。特に、PLLが存在しないことから、この様な積分は、周波数ロック・ループの周波数安定性の逆数以下の間隔で行われる。特に微弱信号条件下における低い周波数安定性により、8データ・ビット列全体の積算では不十分な場合、単一の同期列以上の期間における積分を実行することができ、同期メッセージ間のデータ反転の補正が実行される(すなわち、インコヒーレント技術の拡張した積分を使用する)。
【0057】
コヒーレント積分、或いは、コヒーレント積分とインコヒーレント積分との組み合わせを用いるか否かにかかわらず、システムは、様々な時間解のオプションについての最良の相関結果を検出する。
【0058】
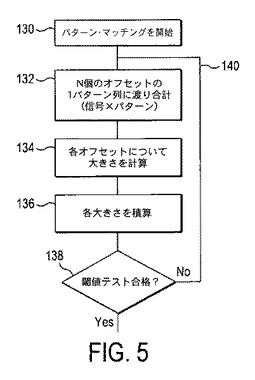
図5において、開始されたパターン・マッチング手順(ステップ130)は、前回のパターン又は期待されるパターン(GPSのBPSK変調に関して±1)に、選択したパターンの長さに渡り複素サンプルを乗算する、“コヒーレント積分”ステップ(ステップ132)を含む。これは、試験において予想される遅延(時間解オプション)のそれぞれについて行われる。次に、(積を合計することで得られる)結果の大きさが、各時間解オプション又はオフセット(“オフセット”)について計算され(ステップ134)、符号及び位相を排除する大きさを得る(コヒーレント積分間では、この様な符号及び位相を得ることができない)。ステップ136で、各オフセットについての大きさが、インコヒーレント積分によって累積される。
【0059】
次に、閾値テストが行われ(ステップ138)、十分なマージンを持つ最大の相関ピークを検出する(例えば、最大ピークと2番目のピークとの比較、或いは、最大ピークと平均相関出力との比較等により行う)。一般的なマージンは2:1である。ループ140の最小繰り返し数を、試験前に決めることが必要である。
【0060】
図4に戻り、パターン・マッチングが完了し(ステップ142)、(ステップ128で試みた近似同期に対する)正確なビット同期が完了すると(ステップ144)、予備的な時間は、例えばカルマン・フィルタを用いることで、ホスト・プロセッサにおいて正確な時間を得ることで、置き換えられる(ステップ146及び148)。
【0061】
以下に述べる様に、上述した8ビット列より短い列を用いてパターン・マッチングを行ってもよく、その利点は、周波数感度が低下し、判定のための自己相関パターンが変動しにくくなることである。以下に述べる様に、差分ビット方式(“差分積算”)を実行することで、衛星データ・ストリームからの航法データではなく、連続するデータ・ビットの差分復調をマッチング対象のパターンとする。このパターンは、周波数に対する耐性が高いが、自己相関関数もまた変化する。GPSプリアンブルの場合、他のデータ列を識別できるが、自己相関から得られる識別性は低く、差分相関方式については、良好な識別性を得られ、この方法は周波数に対して高い耐性を持ち、より長いデータ列を用いることが可能である。
【0062】
予備的な時間解とパターン・マッチング結果との組み合わせによって、“正確な時間”を確立するのに必要な組み合わせが完成する。これにより、おおまかな時間、例えばカルマン・フィルタを用いた測位時間、20ミリ秒の剰余でのビット同期、上述した±3データ・ビットのデータ又は差分データの曖昧性の解消、及び、符号位相マッチング同期(1ミリ秒の剰余)により、正確な時間が確立される。典型的には、50ナノ秒の精度で時間が確立される。なお、符号チップ(1ミリ秒の剰余)同期からの時間確立と、1秒のおおまかな時間不確定性(すなわち1000探索ビン)全体で直接データ・マッチングを試みる場合とを比較すると、上述した方法では、データ・パターンは少数のオプション(例えば、5ビン)を解くだけでよい。これは、同様の閾値であれば、比較によって1/200の誤検出が生じることを意味する。また、同じ誤検出率に対して閾値アルゴリズムを低下させることは、低信号レベルでの検出を引き起こす。データ・ビットは、信号において50%の率で連続的に生じるが、同期データ・ビットは、6秒のサブフレーム当たり、わずか8ビットのみを占有する(すなわち、2.7%)ので、同期データ・ビットのみを使用すると処理速度が遅くなる。これは、多くの応用においては問題とならないが、本方法は同期ビットの使用に限定されず、良好な自己相関を示すデータ列であれば使用可能である。
【0063】
データ・パターン・マッチング結果、すなわち選択した時間解の組み合わせは、ステップ146(図4)において、信号の送信元である衛星のうちわずか1基によって送信された信号からのパターン・マッチング結果を含んでもよい。換言すれば、わずか1基の衛星信号における20ミリ秒及び1ミリ秒の曖昧性が解消できれば、予備的な位置、時間解及び上述したその他のデータの集合は、絶対的な時間の曖昧性を解消する解となる。他の衛星からすでに取得した予備的な位置及び時間解を、ステップ146の組み合わせステップで調整することで、必要とされる正確な時間出力が得られる。
【0064】
以下では、自己相関に基づくパターン選択及びそれに続くパターン・マッチング処理について、衛星データ・ストリームの8ビット・プリアンブル列の例を用いてより詳細に説明する。
【0065】
図6に示す様に、GPS航法メッセージの各サブフレームは、8ビットのプリアンブル列“10001011”で始まり、これをサブフレーム同期処理で使用する。プリアンブル列は固定長なので、プリアンブル列と受信したデータ・ビットの相関を利用することで、受信機は、効果的にサブフレームの開始点を判定し、受信信号の境界を特定し、さらに各サブフレームをトラッキングでき、同期を達成できる。
【0066】
プリアンブル列の自己相関特性は特に重要であり、注目範囲において既知のワードとシフトした複製プリアンブルを相関することで得られる。GPSサブフレームの各ワードの最後の2ビットはゼロであるため(ICD−GPS−200、1991年)、相関ピークの各サイドの領域の自己相関特性を判定する際には、これらのビットを含めることができる。4つより多い衛星が存在し、ナビゲーション解により、約±50ミリ秒まで時間を収束する場合(すなわち、約±2.5データ・ビット)、サブフレームの開始点を識別する能力を高めるために、自己相関ピークの各サイドの領域(3ビット)は、低い相互相関値を持たなければならない。図6に示す様に、プリアンブルに隣接する注目領域には未知の4ビットが存在するので、これらデータ・ビットには16の順列が存在する。
【0067】
図7a〜図7dに示す通り、GPSプリアンブルは要求される時間不確定性(±2.5ビット)、さらにすべての隣接するデータ・ビットの順列に対して極めて良好な自己相関特性を有するものである。
【0068】
プリアンブル列は受信信号とマッチングされ、マッチングが得られるまで、トラッキングされた信号のサンプルについて、20ミリ秒刻みで複製データ・ビット・パターンをシフトすることで相関ピークを形成する。これにより、使用するデータセグメントの長さまで、すなわちGPSデータ・プリアンブルの場合は160ミリ秒まで、積分期間が必然的に延びることとなる。したがって、正確な時間同期が達成する感度は、20ミリ秒の積分期間と比較すると、約9dB改善される。しかし、ユーザの移動及び発振器の安定性により生じる周波数誤差に対する受信機の感度が高まってしまう。160ミリ秒のコヒーレント積分期間は、6.25Hzという比較的狭い周波数帯域幅を意味する。大きな周波数誤差は信号感度を劣化させ、延長したコヒーレント積分期間の利点を縮小する可能性があるので、コヒーレント積分期間を延長する際には、周波数誤差を考慮に入れる必要がある。
【0069】
別の手法によれば、差分復調したGPS受信信号と、局所的に生成した差分復調GPSプリアンブルとを相関する。差分コヒーレント積算は、2つの連続するコヒーレント積分の出力の間で行われる。つまり、後続サンプルに、先行サンプルの共役複素数を乗算し、これらの相関変数を累積して差分コヒーレント出力を得る。次に、ドット積としても知られる差分積算の実部をプリアンブルのドット積と相関する。ドット積は以下に示す積を形成する。
Ym=Im−1Im+Qm−1Qm (1)
ここで、mは対応サンプルのコヒーレント遅延を表す。
【0070】
ドット積がゼロより大きい場合、データ・ビットは変化しない。これは、つまり、信号サンプルの連続する2つのセグメントの間で位相反転が生じないことを意味する。一方、ドット積がゼロ未満の場合、データ・ビット遷移が生じる(すなわち、信号サンプルの連続する2つのセグメントにおいて位相反転が検出される)。
【0071】
図8に、GPSデータ・プリアンブルの差分復調列“0110001”を示す。
【0072】
周波数オフセットが存在する場合には、この技術によってより良い性能を得られるが、図9に示す様に、差分復調GPSプリアンブルは、要求される時間不確定性(±2.5ビット)に関して良好な相互相関性を持っていない。メインピークは、最も高いサイドピークに対する自己相関ピークの比に依存するため、このことはメインピークを正確に検出できる確率に影響する。
【0073】
したがって、周波数オフセットがある場合は、差分プリアンブル検出によってより良い性能を得られるものの、要求される時間不確定性に関しては相互相関性が低くなる。しかし、良好な自己相関が行えるその他のデータ列が存在する。
【0074】
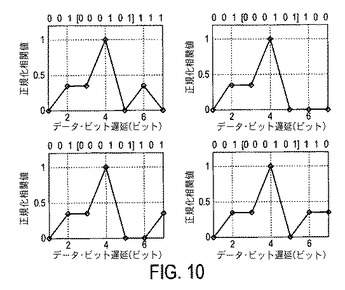
さらに別の手法では、GPSデータ・プリアンブルのサブシーケンスを利用する。これにより、プリアンブルの総てを使用した場合に比べて、周波数オフセットが存在する場合の性能が向上する(すなわち、周波数帯域幅を6.52Hzから8.3Hzに改善する)。6ビット列を用いることで(積算期間は120ミリ秒)、正確な時間同期が達成される感度を20ミリ秒の積算期間に比べて7.78dB改善できる。図10は、GPSプリアンブルの6ビット列“000101”の相関性を示す。したがって、この手法では、6ビットのプリアンブルに対してプリアンブル相関を探索する。
【0075】
さらに、図10に示す様に、プリアンブルのサブシーケンスを用いることで、選択したデータ列の各サイドの未知ビット数を低減できる。
【0076】
したがって、GPSプリアンブルのサブシーケンスは良好な相関性を有し、20ミリ秒の曖昧性を解消するのに採用できる。パターン・マッチング・アルゴリズムを用いてこれらの相関性を利用し、20ミリ秒の曖昧性を解消する。
【0077】
パターン・マッチング・アルゴリズムは、受信データ列を既知のデータ列と相関し、特定の閾値を上回る相関結果が生成された場合に、予測に信頼性を付加するアルゴリズムを用いることで達成される。このアルゴリズムは、同期ワードが後続のサブフレームに出現するという知識に依拠し、それによって検出確率を向上でき、後続のサブフレームについてさらなる相関を行うことで誤同期の確率を低減できる。
【0078】
代わりに、反復しないデータ列を選択したときは、後続サブフレームのデータ列が既知であるか予測可能な場合に同様の特性を達成できる。
【0079】
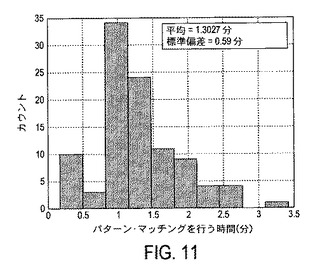
複数のサブフレームの結果を結合することで、同期ワード検出の確率が上昇する。複数のサブフレームを結合する方法の1つとして、検出閾値との比較の前に、複数のサブフレームからの相関結果を合計する。図11は、総ての衛星の信号レベルを−155dBmに設定して、GPSシミュレータにおいて試験を100回行った際のパターン・マッチングに要する時間を示す。
【0080】
要約すると、本発明に関するシステムは、20ミリ秒の曖昧性を解消するために開発されたパターン・マッチング・アルゴリズムを利用する。GPSデータ・プリアンブルの周期的な放送を利用してタイミング同期性能を強化する。
【0081】
ST−NXP GNS4500受信機プラットフォームでは、ナビゲーション解は、複数の実行可能なメカニズムを用いて、位置決定に対するSV軌道位置の確立には十分だが正確なタイミング受信機には不十分な100ミリ秒超に時間を収束する。4つ以上の衛星が存在する場合、ナビゲーション解は、約±50ミリ秒までの時間を確立する。図12〜図18は、この時間推定値が信号条件に依存することを示す。ナビゲーション解によって与えられるこの推定値は、時間不確定性を低減するためにGPS時間再現において採用される。
【0082】
(1)GPS信号シミュレータ、(2)室内アンテナ、及び(3)減衰型屋上アンテナからの信号を用いて一連の試験を行った。大幅に減衰したマルチパス信号を含む苛酷な室内環境を模擬するために、ファイル・キャビネット内に室内アンテナを配置した。それぞれの試験を30分間行った。表1は、すべての試験に使用した初期条件を要約したものである。
【0083】
【表1】
【0084】
A−GPSリンク経由で補助データを試験受信機に供給し、3000kmの初期位置不確定性(Net Assist位置)を用いた。初期位置誤差は実際の位置から約2900kmに設定した。したがって、試験受信機に提供される初期基準位置は、実際の位置から2900kmの誤差を有する。
【0085】
ナビゲーション解の時間収束を試験するために、特別なソフトウェアを開発し、データ復調機能を無効化して、受信機が受信したGPS信号から正確なタイミングを抽出できない様にした。補助データを、AーGPSリンク経由でGN4540試験受信機に供給した。図12、図14及び図17は、GPS衛星捕捉後、ナビゲーション解により、どの様に時間が収束するかを示している。
【0086】
(1)GPS信号シミュレータを用いた場合
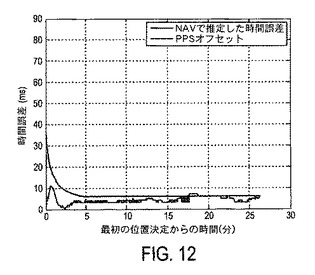
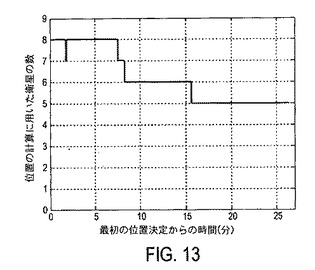
図12及び図13は、シミュレータでの結果を示す。すべての衛星の信号レベルを−155dBmに設定した。図12は、ナビゲーション解により、どの様に時間が収束するかを示し、図13は、最初の位置決定後、位置決定に使用された衛星の数を示す。
【0087】
(2)室内パッチアンテナを用いた場合
図14〜図19は室内環境での結果を示す。
【0088】
(3)減衰型屋外アンテナを用いた場合
図20及び図21は減衰型屋外アンテナを使用した場合の結果を示す。
【0089】
これらの図が示す様に、ナビゲーション解は、シミュレータの信号に関しては10ミリ秒未満まで時間を収束できる(図12)が、厳しい環境下における実際のGPS信号について、最初の位置決定後、(図14、図17及び図20に示す様に)10ミリ秒未満まで時間を収束することはない。時間推定値が所定の閾値に満たない場合、パターン・マッチング・アルゴリズムが初期化される。データ・パターンを検出し、ビット同期情報を得ると、正確なサブフレーム同期が宣言され、正確な時間が確立される。
【0090】
結果
ここで、GNS4540受信機プラットフォームの試験動作の結果をいくつか紹介する。補助データを、AーGPSリンク経由で試験受信機に供給した。試験受信機の1pps出力を監視する基地局として基準局を構成した。基準受信機の1ppsタイミング・パルスとGNS4540試験受信機の1ppsタイミング・パルスとの時間差(オフセット)を測定した。この測定を試験期間中1秒毎に行った。それぞれの試験を30分間行った。
【0091】
(1)GPS信号シミュレータ及び(2)減衰型屋上アンテナからの信号を用いて一連の試験を行った。上記表1は、これらの試験動作に使用した初期条件を要約したものである。
【0092】
(1)GPS信号シミュレータを用いた場合
図22及び図23は、シミュレータでの試験結果を示す。すべての衛星の信号レベルを−155dBmに設定した。図22は、ナビゲーション解により、どの様に時間が収束するかを示し、図23は、最初の位置決定後、位置決定に使用された衛星の数を示す。
【0093】
(2)減衰型屋上アンテナを用いた場合
図24〜図26は減衰型屋上アンテナを使用した場合の結果を示す。図24は微弱信号条件下で正確なタイミングが得られることを示す。図25はナビゲーション解に使用された衛星の数を示し、図26は試験中における総ての衛星の信号レベルを示す。
【0094】
シミュレータによる試験では、ナビゲーション解により、10ミリ秒未満まで時間精度が高くなることが示されている。この場合、ナビゲーション解がタイミング曖昧性をおよそ±10ミリ秒まで解消するため、ビット同期アルゴリズムのみで正確な時間を決定できる。しかし、マルチパス、相互相関、干渉等を含む実際の信号では、±10ミリ秒未満の精度を得られるほどナビゲーション解の信頼性は高くなく、したがって通常はサブフレーム同期アルゴリズムが必要であることを示す。
【0095】
信号レベル−155dBm、初期水平位置誤差2900km、垂直位置誤差100m、及び時間誤差2秒を設定して一連の試験を行ったところ、30分の試験時間の9割において正確な測位が行えた(試験は30分後に再開する)。最初の位置決定までの平均時間(TTFF)は6.01分であった。
【0096】
最後に、これらの結果が示すように、追加のパターン・マッチング・アルゴリズム(すなわち、補助データを必要としない)と改良型ビット同期アルゴリズムのみを用いることで、“室内”での解は、現実の条件における−155dBmの信号レベルで正確な時間を確立できる。
【0097】
上記の試験は、極めて微弱な信号条件下で正確なタイミングを達成できることを示している。とりわけ、本発明は(必ずしも補助データを必要としない)パターン・マッチング・アルゴリズムを利用して、−155dBmという微弱な入力信号について正確な時間を確立する。本発明は、また、上述した様に、改良型ビット同期アルゴリズムをも含む。
【0098】
1つの態様において、本発明は、符号が直接的に明確な疑似距離測定を与えないGNSSシステムの疑似距離測定から正確な時間を確立する方法として要約される。(内部情報源及び外部情報源からの)エフェメリス及びアルマナックを含む補助データを使用する。
【0099】
この方法は、GNSS受信機において、複数の衛星をトラッキングし、部分疑似距離測定、ドップラー測定及び曖昧性解消アルゴリズムを用いて、これら測定値及び補助データと最も適合する位置−速度−時間(PVT)の推定値を提供するステップを実行し、時間解は、少数のデータ・ビットに等しい時間不確定性の範囲を提供する。
【0100】
周波数トラッキング・ループからのフィードバックによって支援される高感度データ・ビット同期アルゴリズムを使用することで、ドップラー・シフトにより受け入れ可能な時定数より長い時定数を許容できる。
【0101】
この方法は、それぞれが、期待される周波数ループの安定性の逆数にほぼ等しい長さを有し、かつ、良好な自己相関特性を有する一連のデータ列を識別することを含む。この方法はさらに、GNSS受信機の時間解の不確定性によって制限される少数の選択的遅延を有するデータ・ビットと同期して、これら既知の、提供された、或いは、予測されたデータ列を入力信号と相関することを含む。
【0102】
最も可能性のある遅延を識別するために、複数のデータ列にわたってインコヒーレントな方法を用いたさらなる相関を採用しても良い。
【0103】
その後、少なくとも1つの衛星からのビット同期及びデータ遅延時間と、元のPVT解の近似時間とを結合することで、符号トラッキングの精度で決定される最終的な精度まで時間解を確立する(この結合はカルマン・フィルタで実施できる)。
【技術分野】
【0001】
本発明は、全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムに関する。本発明の主な用途は微弱信号環境下で正確な時間基準を取得することにある。
【背景技術】
【0002】
GPS(全地球測位システム)は計時目的で広く用いられている。通常、GPSタイミング受信機は通信システム、例えば携帯電話の基地局に時間基準を提供するのに使用される。この場合、時間基準には数ナノ秒の精度が求められる。一般的に、受信機でその様な精度を得るためには、上空に遮蔽物がないことが必要である。通信機器のように、屋内に設置して使用する際には、外部アンテナ、ケーブル、及び関連インタフェースの使用が必須となる。こうした構成の設置には多大な費用と時間を要し、例えばピコセル基地局の屋内設置の妨げとなっている。
【0003】
従来、GPSは、週時間(TOW)データ列を含む低周波衛星データ信号から時間基準を得ている。この信号は、送信データのフレーム構造を識別できる程度の粗い分解能を持つ。データ中のサブフレームのエッジを認識することで、より高い時間分解能が得られ、時間不確定性を6秒から20ミリ秒に低減できる。データ・ビットのエッジを検出して時間不確定性を20ミリ秒から1ミリ秒に低減し、内部符号基準を、送信された拡散符号に合わせ、その位相を測定することにより、時間不確定性をさらに1マイクロ秒より小さくできることも知られている。GPS衛星群の複数の衛星から受信機への信号送信で生じる信号遅延時間を考慮すると、測位エンジン(例えば、カルマン・フィルタ)が位置、時間及び速度(PTV)解を収束させるまでは、補正されない誤差を含む点で、実際のところ、この測定は疑似距離測定と似ている。
【0004】
閉じられた空間、例えばビルの谷間若しくはビルの内部等で生じ得る微弱信号条件下では、衛星信号が弱すぎてデータ・ストリームを復号化できないので、上記の方法は使用できない。必要な衛星のエフェメリス及びクロック補正を含むデータを復号化できないという問題は、通信リンクを介して受信機に同じ情報を送信することで解決できる。しかし、一般的に、この様な方法では正確な時間基準を送信できず、通常は、良くても1秒オーダの粗い時間基準が得られるにすぎない。これは、受信機が上空の衛星位置の最初の推定値を確立するには十分だが、正確な位置を求めるには低すぎる。結果的に、微弱信号条件下で使用されるGPS受信機は、より正確な時間基準を取得するためにさらなる処理を実施する必要がある。
【0005】
PVTの計算は、異なる衛星からの連続した到着時間測定値のデータを含む一連の数式を解くことを含む。この計算にはカルマン・フィルタの使用が有効で、十分な時間があれば、正確な位置を導出できる。カルマン・フィルタは、SV(空間飛行体)の初期位置と、ドップラー・シフトと、経時移動とを整合させて単一で矛盾のない集合にすることで、視野内の各衛星について生じる曖昧さを解決する。しかし、絶対時間は未解決のままであり、その不確定性は±30ミリ秒以上のオーダとなる。こうした不正確さは、信号レベルだけでなく、マルチパス効果やその他の種類の干渉を含む多くの現象に依存している。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、微弱信号状態において基準時間を提供し、遮蔽物のない空でのアンテナ使用の必要性をなくすことを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様によれば、全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムであって、複数の衛星からの符号変調信号を受信し、ダウン・コンバートする無線周波数部、及び、各衛星の不完全な疑似距離の測定値を含む信号を提供するために、ダウン・コンバートした衛星信号を受信し、トラッキングし、復号化する相関器を有する衛星信号受信機と、受信してダウン・コンバートした衛星信号及び不完全な疑似距離の測定値を含む信号のほかに、情報源から補助データを含む信号を受信し、受信した衛星信号が搬送する低周波データ・ビット・ストリームのビット・エッジを識別するデータ・ビット同期を実行し、時間曖昧性を解消するために、低周波データ・ストリーム中の事前に選択したデータ列の相関を実行し、補助データ、衛星信号受信機からの不完全な疑似距離の測定値及び符号トラッキング出力、データ・ビット同期、及び、データ列との相関に基づいて時間基準信号を計算するように構成されたデータ処理部とを備えている。
【0008】
補助データは、一般的に、例えば、通信ネットワークからデータ処理部に供給され得る衛星のエフェメリス及び/又はアルマナック情報を含み、補助データは、遠隔に配置された高強度信号環境下の衛星信号受信機を用いて別の場所で生成されたものである。
【0009】
このシステムは、少なくとも部分的に衛星信号受信機に含まれ、衛星の移動によって生じるドップラー・シフトを示すドップラー・シフト信号を生成するように動作可能な周波数・ロック・ループを含むことが望ましく、システムの処理部は、ドップラー・シフト信号に応答してデータ・ビット同期を修正する様に構成される。したがって、任意の周波数オフセットを補正するために、好ましくは、データ処理部に、フィードバック・ループを採用してデータ・ビット同期の精度を向上する。
【0010】
データ処理部は、不完全な疑似距離の測定値と、好ましくは、ドップラー測定とから生成される位置−速度−時間の推定値を用いて、一般的に、低周波データ・ストリームの1から5データ・ビットの期間に等しい時間不確定性を有する予備的な時間解を提供するように構成されることが望ましい。曖昧性解消アルゴリズムは、測定値及び補助データに最も適合させるために使用される。データ・ビット同期と、受信機が信号を受信する衛星より選択した1つの衛星からの信号における事前に選択したデータ列の相関との結果を用いて、中間的な曖昧性解消と時間解の調整を行っても良い。時間基準信号を生成するために、符号トラッキング出力に応答して時間解のさらなる調整を行うことが望ましい。
【0011】
事前に選択したデータ列は反復データ・パターンを含む。GPSの場合、低周波データ・ストリームのデータ・ビット・プリアンブル列は、その様なパターンである。この場合、データ処理部は、データ列の相関が、受信機が信号を受信する衛星の少なくとも1つから受信した信号におけるデータ・ストリーム中の反復データ・パターンと、期待するデータ・パターンを有する信号との、連続する時間における相関を含む様に構成される。或いは、データ列は、相関を実行中に選択される。換言すれば、選択はリアルタイムで生じる動的処理でも良い。こうした選択は、補助データを用いても良いし、以前に受信したデータ列又は補助データに基づく予測処理によって行われても良い。データ処理部は、こうした場合に潜在的なデータ列のデータ・パターンの自己相関を実行する様に構成されても良く、選択は、平均値又は二番目の値に対する自己相関の最大値の品質に基づいて行われる。いずれの場合も、データ・ストリームにおける入力データの相関はコヒーレント積分及びインコヒーレント積分との組み合わせによって行うことができる。
【0012】
一般的に、周波数ロック・ループを使用してデータ・ビット同期の精度を高める場合、良くとも±11ミリ秒(通常は、良くとも±15ミリ秒)の時間精度を持つ予備的なPVT解が提供されるにすぎず、解は複数の疑似距離時間解オプションの形式であり、その1つは±3ミリ秒より良い精度を有する。最高精度の時間解オプションを識別するための相関は、周波数ロック・ループの周波数安定性の逆数以下の間隔に渡るコヒーレント積分を用いて行う事前に選択したデータ列の相関を含んでも良い。最高精度の時間解オプションの選択は、より長い時間に渡る、上記コヒーレント積分の結果のインコヒーレント積分を含んでも良い。周波数ロック・ループの周波数安定性が低い場合、GPSプリアンブルより短い反復データ列を用いてもよい。或いは、差分復調相関を用いることで、航法データではなく、データ・ストリームの連続ビットの差分復調をマッチング対象のパターンとしてもよく、この場合、(周波数安定性の逆数より)長いデータ・ビット列を用いて良い。
【0013】
非反復データ列を用いる場合、事前の選択は、相関に適したデータ列の決定を含む(すなわち、反復するデータ列においてデータ値が変化しない、或いは、例えば、反復するデータ列においてデータ値が単純に高低を繰り返すようなデータ列を回避する)。
【0014】
パターン・マッチングには16ビット以下のデータ列を用いることが望ましく、8ビット以下のシーケンスが最も望ましい。
【0015】
本発明の第2の態様によれば、全地球的航法衛星群によって生成された信号から時間基準信号を生成する方法であって、複数の受信機出力信号を生成するために、衛星群の複数の衛星から送信された信号を受信し、ダウン・コンバートし、トラッキングするステップと、直接受信した衛星信号のほかに情報源から補助データを受信するステップと、受信機出力信号及び補助データから予備的な時間解を示す信号を生成し、予備的な時間解における時間の曖昧性を解消するために、少なくとも1つの衛星が送信した信号が搬送するデータ・ストリーム中の事前に選択したデータ列の相関を取り、これにより±1ミリ秒より高い精度で時間を表す時間基準信号を生成するステップと、を含む方法が提供される。
【0016】
本発明の第3の態様によれば、全地球的航法衛星群によって生成された信号から時間基準信号を生成する方法であって、複数の受信機出力信号を生成するために、衛星群の複数の衛星から送信された信号を受信し、ダウン・コンバートし、トラッキングするステップと、直接受信した衛星信号のほかに情報源から補助データを受信するステップと、受信機出力信号及び補助データから予備的な時間解を示す信号を生成し、少なくとも1つの衛星が送信した信号が搬送するデータ・ストリームのビット・エッジを識別するデータ・ビット同期を実行するステップと、を含み、データ・ビット同期は、受信データ・ストリームのサンプルの周波数シフト補正積分の実行を含み、これにより、受信データ・ストリームのデータ速度のシフト、例えばドップラー・シフトを補正する方法が提供される。
【0017】
以下に、添付の図面を参照し、例を用いて本発明を説明する。
【図面の簡単な説明】
【0018】
【図1】本発明による時間基準システムを示すブロック図。
【図2】GPS信号を示す波形図。
【図3】GPS信号が搬送する低周波データ・ストリームのデータ・フォーマットを示す図。
【図4】本発明による正確な時間解を生成する方法を示すフローチャート。
【図5】図4のフローチャートの一部であるパターン・マッチング処理を示すフローチャート。
【図6】GPSプリアンブルを含む低周波データ・ストリームの一部を示す図。
【図7a】異なるビット値が前後に存在するGPSプリアンブルの自己相関特性を示す相関図。
【図7b】異なるビット値が前後に存在するGPSプリアンブルの自己相関特性を示す相関図。
【図7c】異なるビット値が前後に存在するGPSプリアンブルの自己相関特性を示す相関図。
【図7d】異なるビット値が前後に存在するGPSプリアンブルの自己相関特性を示す相関図。
【図8】GPSプリアンブル列の差分相関を示す図。
【図9】異なるデータ・ビット値が前後に存在する差分復調されたGPSプリアンブルの自己相関特性を示す図。
【図10】GPSプリアンブル列の中央部分の自己相関特性を示す相関図。
【図11】入力信号レベル−155dBmのパターン・マッチングにかかる時間を示す図。
【図12】GPSシミュレータを使用し、ナビゲーション解とPPSオフセットとによって推定した時間誤差を示す図。
【図13】図12に示す時間誤差を求めたナビゲーション解で使用した衛星の数を示す図。
【図14】GPS信号シミュレータの代わりに室内アンテナを使用して得た図12及び図13にそれぞれ対応する時間誤差及び衛星の数を示す図。
【図15】GPS信号シミュレータの代わりに室内アンテナを使用して得た図12及び図13にそれぞれ対応する時間誤差及び衛星の数を示す図。
【図16】室内アンテナを使用した際の衛星の搬送波対雑音比(CNR)を示す図。
【図17】別の室内アンテナを使用した際の図12及び図13にそれぞれ対応する図。
【図18】別の室内アンテナを使用した際の図12及び図13にそれぞれ対応する図。
【図19】第2の室内アンテナを使用して得たCNRを示す図。
【図20】減衰型屋上アンテナを使用して得た図12及び図13にそれぞれ対応する時間誤差及び衛星の数を示す図。
【図21】減衰型屋上アンテナを使用して得た図12及び図13にそれぞれ対応する時間誤差及び衛星の数を示す図。
【図22】GPS信号シミュレータによる低周波信号を取得した際の図12及び図13に対応する図。
【図23】GPS信号シミュレータによる低周波信号を取得した際の図12及び図13に対応する図。
【図24】減衰型屋上アンテナから低周波信号を取得した際の図12及び図13に対応する図。
【図25】減衰型屋上アンテナから低周波信号を取得した際の図12及び図13に対応する図。
【図26】減衰型屋上アンテナを使用した際の衛星のCNRを示す図。
【発明を実施するための形態】
【0019】
室内環境においては、衛星とユーザ間の見通し信号が弱く、或いは、著しく減衰していることが多く、室内の受信機は、室内に一般的に存在する情報源からの干渉に影響されやすく、正確な時間の転送及び正確な同期アプリケーションを有効に利用できないため、室内環境はGPSの運用には問題の多い領域である。さらに、多くのマルチパス信号の存在により計時精度が低下する。
【0020】
GPS計時性能は、通常、受信機のナビゲーション・データの復調能力により制約を受け、計時の不確定性をミリ秒まで低減する性能は、約−145dBm未満の信号レベルで正確なミリ秒を識別して決定する能力により制約を受ける。この処理時点においては、信号レベルが低すぎてデータ・ビット間の位相反転箇所を特定できず、よって、データ・ビットを特定できないため、受信機は、データ・ビット・エッジを非同期に積分する必要があるかもしれないからである。しかし、A−GPSリンク経由で受信機に補助データを提供できる。一旦、位置が確定すれば、GPS時間とローカル時間との間のオフセットは、ナビゲーション解によって収束され得るが、この分解能では、低信号レベルで正確なミリ秒の同期は行えない。衛星の数が4基より多ければ、ナビゲーション解は、およそ±50ミリ秒の精度の時間を確立できる。この数値は信号条件に依存し、以下では数回の実地試験の結果に基づいて説明する。
【0021】
理想的には、ナビゲーション解がおよそ±10ミリ秒の時間に収束できれば、ビット同期アルゴリズムがビットの遷移を検出し、ミリ秒の曖昧性を解消できる。しかし、30〜50ミリ秒の時間不確定性が存在する場合、ビット同期アルゴリズムはミリ秒の曖昧性を解消できるが、依然として20ミリ秒の不確定性が残る。
【0022】
本発明によれば、ナビゲーション解を用いて時間の分解能を約30〜50ミリ秒に改善し、1ミリ秒のビット同期を確立し、20ミリ秒の曖昧性を解消し、これにより正確な時間を得る。時間の不確定性を排除するために、本発明の好適な一実施形態において提案されるアルゴリズムは、GPSデータ・プリアンブルの反復構造を利用して、20ミリ秒の曖昧性を解消する。以下に述べるように、GPSプリアンブルは、要求される時間不確定性に対して良好な自己相関特性を有する。自己相関特性を利用して20ミリ秒の曖昧性を解消するその他のアルゴリズムを開示して比較する。
【0023】
基準ネットワークが航法メッセージ、初期位置、及び時間推定値に関する支援を行う支援型GPS等、室内でのGPSアプリケーションの性能を改善するために、ここ数年間で種々の技術が導入されてきた。これによりGPS受信機は、受信機内でのコヒーレント積分期間を延ばすことができ、感度を増強できた。しかし、コヒーレント積分期間の残余周波数誤差と、航法データ・ビットにより、コヒーレント積分時間は20ミリ秒が限度となっている。残余周波数誤差は、衛星の動き、受信機のクロックの不安定性、及びユーザの動きに由来するドップラー効果によって生じる。従来のGPS受信機は、一般的に、最長20ミリ秒のコヒーレント期間より短い積分期間を使用するため、その動作環境は、強い信号(−145dBmを超える信号)が存在する範囲内に限定されている。
【0024】
本発明による好適な時間基準システムは、ICチップとしてSTエリクソン社製GNS4540を使用している。
【0025】
GNS4540は、L1信号用GPS受信機の高性能シングル・チップであり、ベースバンド信号処理を提供する。DSPは、GPS捕捉及びトラッキングを制御するファームウェアを含み、ナビゲーションの解決は、組込み型システム上のプロセッサ又はPCのプロセッサであり得る、ホスト・プロセッサで実行する。図1は、受信機チップ及びホスト・プロセッサのブロック図である。このシステムは、補助データを使用し、データ・ビットを長時間に渡りインコヒーレントに積分することで、全体的な受信信号感度を強化し、これにより、信号捕捉性能を向上させることで、ビルの内部や、所謂アーバンキャニオン等、信号レベルが微弱な厳しい環境下での信号処理を可能とし、室内環境においてさえ高性能測位を可能にしている。
【0026】
従来の衛星信号受信機と同様、GNS4540受信機チップ10は、複数の衛星からの符号変調信号を受信し、ダウン・コンバートする無線周波数部10Aと、ダウン・コンバートされた衛星信号を受信し、トラッキングし、復号化することで各衛星の不完全な(partial:或いは、部分的な)疑似距離の測定値を含む信号を提供する相関器エンジン12を含むベースバンド部10Bとを有する衛星信号受信機を備えている。データ処理ホスト・システム14は、補助データ・ポート14A経由で、通信ネットワーク等の外部情報源から補助データを含む信号を受信し、シリアル・インターフェス・リンク16経由で不完全な疑似距離の測定値を含む信号を受信する様に構成される。
【0027】
“疑似距離”とは、衛星と受信機間の信号パスの遅延時間の推定値のことである。このパスの遅延は、一般に70ミリ秒のオーダである。GPS信号を図2の波形図に示す。1575.42MHzのL1キャリアは、基本符号レート1.023MHzの疑似ランダム拡散符号で変調される。各チップは1540のキャリア・サイクルを含む。疑似ランダム符号(PRC)は、1023チップ(すなわち、1ミリ秒)の長さを有する。符号は1kHzで繰り返される。信号は、データ・ストリームを用いて、これよりはるかに低い周波数で変調される。この低周波数すなわちデータ・レートは50Hzであり、これは、データ・ストリーム1ビットは、20ミリ秒の長さを持つことを意味する。拡散符号(PRC)は1ミリ秒ごとに繰り返され、符号との同期で疑似距離の小数部が与えられる(ミリ秒単位)。疑似距離のミリ秒の整数部分は、他の手段で推定され、従来は使用する各衛星におけるデータ構造を復号化することで推定していた。
【0028】
受信機10は、入力キャリアに同期する局部発振器10−1を含む周波数ロック・ループ(FLL)を備えている。相関器エンジン12は、疑似ランダム符号(PRC)と同期し、曖昧性1ミリ秒で1マイクロ秒未満の分解能を生成する符号ループを含む。したがって、組込み型プロセッサ・サブシステム18又はホスト・システム14は、データを復号化できたか否かにかかわらず、50Hz低周波GPS航法メッセージ・データ・ストリームのデータ・ビット遷移に同期できる。これにより曖昧性20ミリ秒で1ミリ秒未満の分解能が得られる。
【0029】
図3において、GPSデータ信号によって表されるデータ・ストリームは、25個のデータ・フレームを含み、全体で12.5分の長さを持つ(25個のフレームは12.5分毎に繰り返される)。図3に示す様に、各データ・フレームは30秒の長さを有し、50Hzのデータ・レートで1500データ・ビットを含む。各フレームは、クロック・パラメータと、エフェメリス(2つのサブフレーム)と、システム・メッセージ及びアルマナックを含むサブフレーム(サブフレーム4)と、更なるアルマナック(サブフレーム5)とに関するデータを含む5つのサブフレームを含む。各サブフレーム4は、合計25ページからなるシステム・メッセージ及びアルマナックの内の1ページを含み、後続の30秒データ・フレームには25ページの内の後続のページが含まれる。同じく、後続の30秒データ・フレームには、サブフレーム5における25ページからなるアルマナックの後続のページが含まれる。同図に示すとおり、各サブフレームは6秒の長さを有し、50Hzのデータ・ストリームの300ビットを、10のデータ・ワードに分割して含んでいる(図3で、“TLM”は、テレメトリー・ワード(“ユニーク・ワード”)を意味し、“HOW”は、週時間(TOW)及びサブフレームID(識別子)を含む、所謂ハンドオーバー・ワードを意味する)。各ワードは24以上のデータ・ビットと6パリティ・ビットからなる(パリティは1ワード以上で計算される)。
【0030】
信号強度が十分なときは、サブフレーム同期はホスト・システム14(図1)がデータを復号化することで行われ、6秒の曖昧性で20ミリ秒未満の分解能が得られる。サブフレームのデータを復号化することで、1.5秒単位での週時間(TOW)及び週番号が得られる。
【0031】
エフェメリス/軌道及びクロック・パラメータ等の付加データは、上述したように、複数のサブフレームに分散される。
【0032】
従来のGPS受信機は、GPS信号の航法メッセージに含まれるTOWデータを読み出すことで、衛星の送信に関連する絶対時間を判定する。TOWカウントは、6秒ごとに航法メッセージ・データ・ストリームで報告され、現在のGPS週開始以来の経過時間を与える。
【0033】
50Hzのデータ・ストリームを、1ミリ秒のGPSのC/A符号の遷移に合わせ、データ・ビット・エッジの到着時間(20ミリ秒間隔)によって絶対送信時間を、最も近い20ミリ秒に決定する。C/A符号は、1ミリ秒毎に繰り返されるため、GPS時間1ミリ秒毎に不定となる。ビット境界に正確に同期することで、絶対遷移時間を1ミリ秒以下に特定できる。GPS航法メッセージは、システム時間、衛星エフェメリス及びアルマナック情報を含んでいる。
【0034】
GPS受信機においては、衛星が4つ以上存在し、少なくとも4つの異なる衛星からの到着時間(ToA)の測定値が得られ、有効な衛星軌道データが受信される場合、ナビゲーション解が時間を特定すると、復調された衛星データ・ストリーム、データ・サブフレーム、データ・ビット同期(ミリ秒単位)及び符号チップ・カウントと符号位相(サブミリ秒、例えば50ナノ秒)との組み合わせから時間を回復できる。
【0035】
信号レベルが高ければ(−145dBmより高い場合)、データ・ビット・エッジを検出可能であり、キャリア・トラッキングからデータ・ビットが得られ、サブフレーム同期を確立できる。そしてGPSデータ・ストリームと、サブミリ秒単位で検出可能なビット・エッジから時間を確立する。
【0036】
計時性能は、−145dBmより低い信号レベルにおいて正しいデータを解決する受信機の能力によって制約を受ける。受信機は受信信号から航法データを抽出できず、受信機は入力ビット、ワード又はサブフレームに同期できないので、有効な衛星軌道情報を得るためには外部ソースからの補助データが必要である。位置が決定されれば、GPS時間とローカル時間との間のオフセットは、ナビゲーション解によって±50ミリ秒より良好な値に収束され得るが、この分解能では低信号レベルでのミリ秒単位での正確な同期は行えない。
【0037】
積分時間が20ミリ秒に達せずビット・エッジが“ぼやける”中間レベルの信号(−145dBmから−150dBm)については、受信機はトラッキングした衛星毎に、ビット同期アキュムレータを起動してデータ・ビット・エッジを探索する。ここで用いられるビット同期アルゴリズムは、受信したGPS信号からタイミング情報を抽出する遷移検出法である。データ・ビット当たり、1ミリ秒のエポック期間のC/A符号が20個存在し、ビット・エッジはC/A符号の先頭に合わせるため、ビット同期アルゴリズムは、想定したデータ・ビット期間を20個の1ミリ秒のタイム・スロットに分割する。検出する位相反転は、検出箇所である1ミリ秒のタイム・スロットに従って適切な積分スロットに付加される。時間の経過とともに、これらのスロットの1つが積算されて他のスロットより高レベルとなり、閾値メカニズムによって正しいミリ秒が検出される。積分期間を長くすれば、ビット遷移の生起数も増加するため、データ・ビット遷移を正しく検出できる確率が高くなる。また、積分期間を長くすれば、雑音余裕度を改善できる。したがって、微弱信号環境においては、ビット同期アルゴリズムの積分期間を長くとることが可能であり、3秒を超える補助があれば、1回のサブフレーム復号化で正確な時間を確立できる。これは、データ復号化を連続してエラー無しで行えるレベル、例えば−150dBmより若干低いレベルで達成できる。
【0038】
これより低いレベル(−150dBm未満)では、信号から符号位相のみを抽出できる。したがって、中間レベルの信号に用いられたのと同様のビット同期メカニズムが適用される。しかし、微弱信号に必要な積分期間と、クロック・オフセット、衛星の動き及び例えばユーザの動きに由来するドップラー効果によって生じる信号の強弱とに起因して、ビット・エッジがタイム・スロット間で傾斜する。結果的に、このビット同期法で正しいミリ秒のスロットを検出できる確率が低下する。データ・エッジが位置するいくつかの隣接するミリ秒区間を検出することが可能であり、これを“近似ミリ秒同期”と呼ぶものとする。これは、ナビゲーション解のために用いるには十分だが、計時には不十分である。したがって、サブミリ秒の時間分解能が得られれば高精度計時が可能となるが、一方でN×1ミリ秒のオフセットが問題となる。
【0039】
データ・ビット同期はGPS受信機10の組込み型プロセッサ・システム18で実施される。受信信号のレベルが低い場合、データ・ストリームの復号化はできないものの、データ・ビット同期を行うことは可能である。
【0040】
微弱信号環境にビット同期アルゴリズムを適用するために、ビット同期における積分期間を延長することで、拒絶率を増加させることなしにビット遷移の検出能力を改善できる。
【0041】
最大エネルギーを持つタイム・スロットに対する2番目に大きいエネルギーを持つタイム・スロットの比率が、所定の閾値より大きくなる様にする閾値手法を用いることで、閾値ビット同期アルゴリズムを改良する。したがって、比率が閾値より小さければ、決定はなされず、ビット同期アルゴリズムは再初期化される。信号が微弱な場合、或いは、積分期間中の受信信号のデータ・ビット遷移が不足している場合、特に、この手法によってビット同期アルゴリズムのロバスト性を改善できる。
【0042】
微弱信号において正しいミリ秒スロットを検出する確率を最大とし、ビット同期の誤り率とビット遷移を検出するのに必要な時間との最良のトレードオフを可能にする様に、閾値を選択する。閾値は、信号強度、積分期間の長さ、及び、所望の誤り率の関数である。検出閾値が大きすぎる場合、微弱信号レベルでのビット遷移検出確率は低下し、ビット遷移検出時間の増大を招く。一方で、閾値が小さすぎる場合には、誤検出が生じ、正しいミリ秒スロットを発見できる確率が低下する。
【0043】
上述した様に、正しいビット・エッジを有するタイム・スロットが検出閾値を超えるのに要する積分期間が長くなることから、GPS信号中のドリフト及びドップラー・シフトにより生ずる周波数オフセットにより、隣接するタイム・スロット間でビット・エッジが傾斜するため、微弱信号中のデータ・ビット遷移を正しく検出できる確率は低下する。
【0044】
周波数オフセットを補正するために、フィードバック・ループを採用することで、長い積分期間におけるビット同期推定値の精度を向上する。例えば、ロ−カル受信機クロックによって計時された50Hzのデータ・レートのデータ・ストリームのドップラー・シフトをこのように補正することが可能となる。
【0045】
周波数補正機能は、組込み型プロセッサ・サブシステム18(図1)を使用して、いくつかの方法によって実現できる。第1の方法は、ビット同期プロセスをビット位置及び周波数の2次元探索に拡張することを含む。この手法では、ビット同期アルゴリズムによって、複数の周波数オフセットの異なるビット位置候補に対して、20個のタイム・スロットを計算する。最大エネルギーを持つタイム・スロットは、データ・ビット位置に正確に沿って積分されたタイム・スロットである。その周波数ビンからの20個のタイム・スロットを、各ビット位置の推定値を評価するのに使用する。しかし、この手法では計算にかかるコストが高くなる。
【0046】
第2の手法は、ビット同期アルゴリズムの補助に周波数トラッキング・ループを用いることで、衛星ダイナミクスの差及び変化による隣接タイム・スロット間のビット・エッジの傾斜を防止する。
【0047】
第3の方法は、20ミリ秒の積算に基づいて微弱信号中のデータ・ビット遷移を正しく検出する確率を高める。しかし、この手法はメモリ条件が厳しくなる。
【0048】
図4は、図1で説明した時間基準システムの組込み型プロセッサ・サブシステム18とホストデータ処理システム14とによって実行されるソフトウェア工程を示すフローチャートである。最初に、ホスト・システムは補助データ・ポート14A(図1)を介して、エフェメリス及びアルマナック情報と、大まかな時間値とを提供する補助データを収集する(ステップ102)。整数値で1ミリ秒の疑似距離の分解能を得るために、補助位置データは100kmより小さいことが望ましい。
【0049】
次に、高い信号レベルのSV(空間飛行体)を探索する(ステップ104)。SVが発見されたならば、少なくとも1つのSVからのデータ・ストリームを復号化することで、位置、時間及び速度(PTV)の解を求める(ステップ106及び108)。高強度信号が発見できなければ、組込み型プロセッサ・サブシステムによって、上述した低レベル信号探索が行われる(ステップ110)。SVが発見されるたびに(ステップ112)、上述したビット同期ルーチンが開始される(ステップ114)。近似同期を用いてコヒーレント積分を調整することで感度を向上することもできる。4つのSVが発見されれば(ステップ116)、信号が微弱でも(ステップ116及び118)、最初の位置−速度−時間(PVT)を取得できる。位置は、計算によって求められた整数値のミリ秒(ステップ120)、或いは、初期位置が100km以内にあると認識されたか否かに依存する付加的な曖昧性の分解能(ステップ120)で与えられる。
【0050】
要約すると、上記の工程によって極めて微弱な信号環境下でデータ・ビット遷移を正しく検出できる確率が高まる。
【0051】
受信機がビット遷移を検出した後、受信機は、航法メッセージの復調を開始し、メッセージが受信信号のどこに存在するかを確認する。しかし、受信信号が非常に弱い場合、データ・ビット間の位相反転を検出するのが困難であり、受信したGPS信号を確実に復調することができないため、ナビゲーション解によって確立された±50ミリ秒の分解能に対して20ミリ秒の曖昧さが残る。20ミリ秒のデータ・ビットの積分と、位置については十分高い精度であるが、計時には不十分である。
【0052】
次に受信機は、受信した衛星信号の低周波データ・ストリーム中で事前に選択したデータ列のパターン・マッチングを含む処理を実行し、この様なデータ列の一例が、データ・ストリームの各サブフレームの先頭に出現する8ビットのGPSデータ・プリアンブルである(図3参照)。しかし、反復する、或いは、反復しないデータ列を使用可能である。パターン・マッチングによって、上述した20ミリ秒の曖昧性が解消される。微弱信号条件下では衛星データ自体を復号化できないが、選択したデータ列による、異なる相関方法を用いてこの処理を行うことができる。
【0053】
図4に戻り、ホスト・システム14は、まず、上述したビット同期処理の後に得られる予備的な時間の精度を推定する(ステップ124)。この精度の推定値は、1つ以上の選択されたデータ列のパターン長に基づいて設定された目標時間精度と比較される(ステップ126)。目標時間精度は、良好な相関判定を得るために、予め決められた自己相関関数限界の範囲より小さくなるように設定される。推定した時間の精度が目標より低ければ、組込み型プロセッサ・サブシステムは、ビット同期処理により、少なくともおおよそのデータ・ビット位置を得たか否かのチェックを経て、パターン・マッチングに進む(ステップ130及び図5)。
【0054】
位相同期ループ(PPL)の動作がない場合(低信号レベルの場合)には、事前に選択したデータ列を相関する、長期間のコヒーレント積分を行えない。しかし、位置解決ステップ120又は122で得た予備的な位置により、時間不確定性は、ごく少数(例えば、3〜5)の不定時間オプションに局所化できる。これは、図3からわかるように、各サブフレームに出現するデータ列は6秒ごとに出現するものであり、受信機でそれまでに行われた処理で生じた時間不確定性内において、適切なサブフレームの配置は、ごく少数しか存在しない(この不確定性は±50ミリ秒に達することもあるが、一般には±30ミリ秒である)からである。
【0055】
データ・ビット・エッジとの同期がすでになされているので、曖昧な分解能の問題は、この小さな曖昧性の解消に軽減される。図6に示す8データ・ビット同期又は衛星データのプリアンブル列は、図7a〜図7dに示す様に、±3データ・ビットに渡り良好な自己相関特性を有しており、位置が正しく合っていないとき、信号データの未知の状態を許容する。図6からわかるように、8ビットのプリアンブル列は、ビット10001011を含む。先行するサブフレームの最後の2ビットは00である。“x”で示すビットは、プリアンブル付近の注目領域における未知ビットである。図7a〜図7dは、ノイズが存在しない場合における、事前に選択したプリアンブル列の自己相関によって得られた正規化相関値を示す。事前に選択したデータ・ビットのプリアンブル列前後のビットが異なるデータ値を含む場合の、位置が合った状態と合っていない状態の入力及び基準列についての値を示している。位置が合っている場合(アライメント)に生じる正規化相関値のピークは、±1、2又は3データ・ビットのずれがある場合に得られる値の少なくとも2倍であり、このデータ列は良好な自己相関特性を有することがわかる。相関マージン、即ち、位置が合っているときの正規化相関値と、合っていない時(ミスアライメント)の値との比は、少なくとも2:1であり、1又は2ビットのずれの場合は、4:1以下となる。一般的に、±2.5ビットのずれに対して2:1のマージンがあれば良好な結果が得られるが、より小さいマージンでもかまわない。
【0056】
好適な受信機においては、期待される周波数精度に対応した短い間隔に渡る、時間解のオプションのそれぞれについてのコヒーレント積分を利用した直接相関によってパターン・マッチングを実行する。特に、PLLが存在しないことから、この様な積分は、周波数ロック・ループの周波数安定性の逆数以下の間隔で行われる。特に微弱信号条件下における低い周波数安定性により、8データ・ビット列全体の積算では不十分な場合、単一の同期列以上の期間における積分を実行することができ、同期メッセージ間のデータ反転の補正が実行される(すなわち、インコヒーレント技術の拡張した積分を使用する)。
【0057】
コヒーレント積分、或いは、コヒーレント積分とインコヒーレント積分との組み合わせを用いるか否かにかかわらず、システムは、様々な時間解のオプションについての最良の相関結果を検出する。
【0058】
図5において、開始されたパターン・マッチング手順(ステップ130)は、前回のパターン又は期待されるパターン(GPSのBPSK変調に関して±1)に、選択したパターンの長さに渡り複素サンプルを乗算する、“コヒーレント積分”ステップ(ステップ132)を含む。これは、試験において予想される遅延(時間解オプション)のそれぞれについて行われる。次に、(積を合計することで得られる)結果の大きさが、各時間解オプション又はオフセット(“オフセット”)について計算され(ステップ134)、符号及び位相を排除する大きさを得る(コヒーレント積分間では、この様な符号及び位相を得ることができない)。ステップ136で、各オフセットについての大きさが、インコヒーレント積分によって累積される。
【0059】
次に、閾値テストが行われ(ステップ138)、十分なマージンを持つ最大の相関ピークを検出する(例えば、最大ピークと2番目のピークとの比較、或いは、最大ピークと平均相関出力との比較等により行う)。一般的なマージンは2:1である。ループ140の最小繰り返し数を、試験前に決めることが必要である。
【0060】
図4に戻り、パターン・マッチングが完了し(ステップ142)、(ステップ128で試みた近似同期に対する)正確なビット同期が完了すると(ステップ144)、予備的な時間は、例えばカルマン・フィルタを用いることで、ホスト・プロセッサにおいて正確な時間を得ることで、置き換えられる(ステップ146及び148)。
【0061】
以下に述べる様に、上述した8ビット列より短い列を用いてパターン・マッチングを行ってもよく、その利点は、周波数感度が低下し、判定のための自己相関パターンが変動しにくくなることである。以下に述べる様に、差分ビット方式(“差分積算”)を実行することで、衛星データ・ストリームからの航法データではなく、連続するデータ・ビットの差分復調をマッチング対象のパターンとする。このパターンは、周波数に対する耐性が高いが、自己相関関数もまた変化する。GPSプリアンブルの場合、他のデータ列を識別できるが、自己相関から得られる識別性は低く、差分相関方式については、良好な識別性を得られ、この方法は周波数に対して高い耐性を持ち、より長いデータ列を用いることが可能である。
【0062】
予備的な時間解とパターン・マッチング結果との組み合わせによって、“正確な時間”を確立するのに必要な組み合わせが完成する。これにより、おおまかな時間、例えばカルマン・フィルタを用いた測位時間、20ミリ秒の剰余でのビット同期、上述した±3データ・ビットのデータ又は差分データの曖昧性の解消、及び、符号位相マッチング同期(1ミリ秒の剰余)により、正確な時間が確立される。典型的には、50ナノ秒の精度で時間が確立される。なお、符号チップ(1ミリ秒の剰余)同期からの時間確立と、1秒のおおまかな時間不確定性(すなわち1000探索ビン)全体で直接データ・マッチングを試みる場合とを比較すると、上述した方法では、データ・パターンは少数のオプション(例えば、5ビン)を解くだけでよい。これは、同様の閾値であれば、比較によって1/200の誤検出が生じることを意味する。また、同じ誤検出率に対して閾値アルゴリズムを低下させることは、低信号レベルでの検出を引き起こす。データ・ビットは、信号において50%の率で連続的に生じるが、同期データ・ビットは、6秒のサブフレーム当たり、わずか8ビットのみを占有する(すなわち、2.7%)ので、同期データ・ビットのみを使用すると処理速度が遅くなる。これは、多くの応用においては問題とならないが、本方法は同期ビットの使用に限定されず、良好な自己相関を示すデータ列であれば使用可能である。
【0063】
データ・パターン・マッチング結果、すなわち選択した時間解の組み合わせは、ステップ146(図4)において、信号の送信元である衛星のうちわずか1基によって送信された信号からのパターン・マッチング結果を含んでもよい。換言すれば、わずか1基の衛星信号における20ミリ秒及び1ミリ秒の曖昧性が解消できれば、予備的な位置、時間解及び上述したその他のデータの集合は、絶対的な時間の曖昧性を解消する解となる。他の衛星からすでに取得した予備的な位置及び時間解を、ステップ146の組み合わせステップで調整することで、必要とされる正確な時間出力が得られる。
【0064】
以下では、自己相関に基づくパターン選択及びそれに続くパターン・マッチング処理について、衛星データ・ストリームの8ビット・プリアンブル列の例を用いてより詳細に説明する。
【0065】
図6に示す様に、GPS航法メッセージの各サブフレームは、8ビットのプリアンブル列“10001011”で始まり、これをサブフレーム同期処理で使用する。プリアンブル列は固定長なので、プリアンブル列と受信したデータ・ビットの相関を利用することで、受信機は、効果的にサブフレームの開始点を判定し、受信信号の境界を特定し、さらに各サブフレームをトラッキングでき、同期を達成できる。
【0066】
プリアンブル列の自己相関特性は特に重要であり、注目範囲において既知のワードとシフトした複製プリアンブルを相関することで得られる。GPSサブフレームの各ワードの最後の2ビットはゼロであるため(ICD−GPS−200、1991年)、相関ピークの各サイドの領域の自己相関特性を判定する際には、これらのビットを含めることができる。4つより多い衛星が存在し、ナビゲーション解により、約±50ミリ秒まで時間を収束する場合(すなわち、約±2.5データ・ビット)、サブフレームの開始点を識別する能力を高めるために、自己相関ピークの各サイドの領域(3ビット)は、低い相互相関値を持たなければならない。図6に示す様に、プリアンブルに隣接する注目領域には未知の4ビットが存在するので、これらデータ・ビットには16の順列が存在する。
【0067】
図7a〜図7dに示す通り、GPSプリアンブルは要求される時間不確定性(±2.5ビット)、さらにすべての隣接するデータ・ビットの順列に対して極めて良好な自己相関特性を有するものである。
【0068】
プリアンブル列は受信信号とマッチングされ、マッチングが得られるまで、トラッキングされた信号のサンプルについて、20ミリ秒刻みで複製データ・ビット・パターンをシフトすることで相関ピークを形成する。これにより、使用するデータセグメントの長さまで、すなわちGPSデータ・プリアンブルの場合は160ミリ秒まで、積分期間が必然的に延びることとなる。したがって、正確な時間同期が達成する感度は、20ミリ秒の積分期間と比較すると、約9dB改善される。しかし、ユーザの移動及び発振器の安定性により生じる周波数誤差に対する受信機の感度が高まってしまう。160ミリ秒のコヒーレント積分期間は、6.25Hzという比較的狭い周波数帯域幅を意味する。大きな周波数誤差は信号感度を劣化させ、延長したコヒーレント積分期間の利点を縮小する可能性があるので、コヒーレント積分期間を延長する際には、周波数誤差を考慮に入れる必要がある。
【0069】
別の手法によれば、差分復調したGPS受信信号と、局所的に生成した差分復調GPSプリアンブルとを相関する。差分コヒーレント積算は、2つの連続するコヒーレント積分の出力の間で行われる。つまり、後続サンプルに、先行サンプルの共役複素数を乗算し、これらの相関変数を累積して差分コヒーレント出力を得る。次に、ドット積としても知られる差分積算の実部をプリアンブルのドット積と相関する。ドット積は以下に示す積を形成する。
Ym=Im−1Im+Qm−1Qm (1)
ここで、mは対応サンプルのコヒーレント遅延を表す。
【0070】
ドット積がゼロより大きい場合、データ・ビットは変化しない。これは、つまり、信号サンプルの連続する2つのセグメントの間で位相反転が生じないことを意味する。一方、ドット積がゼロ未満の場合、データ・ビット遷移が生じる(すなわち、信号サンプルの連続する2つのセグメントにおいて位相反転が検出される)。
【0071】
図8に、GPSデータ・プリアンブルの差分復調列“0110001”を示す。
【0072】
周波数オフセットが存在する場合には、この技術によってより良い性能を得られるが、図9に示す様に、差分復調GPSプリアンブルは、要求される時間不確定性(±2.5ビット)に関して良好な相互相関性を持っていない。メインピークは、最も高いサイドピークに対する自己相関ピークの比に依存するため、このことはメインピークを正確に検出できる確率に影響する。
【0073】
したがって、周波数オフセットがある場合は、差分プリアンブル検出によってより良い性能を得られるものの、要求される時間不確定性に関しては相互相関性が低くなる。しかし、良好な自己相関が行えるその他のデータ列が存在する。
【0074】
さらに別の手法では、GPSデータ・プリアンブルのサブシーケンスを利用する。これにより、プリアンブルの総てを使用した場合に比べて、周波数オフセットが存在する場合の性能が向上する(すなわち、周波数帯域幅を6.52Hzから8.3Hzに改善する)。6ビット列を用いることで(積算期間は120ミリ秒)、正確な時間同期が達成される感度を20ミリ秒の積算期間に比べて7.78dB改善できる。図10は、GPSプリアンブルの6ビット列“000101”の相関性を示す。したがって、この手法では、6ビットのプリアンブルに対してプリアンブル相関を探索する。
【0075】
さらに、図10に示す様に、プリアンブルのサブシーケンスを用いることで、選択したデータ列の各サイドの未知ビット数を低減できる。
【0076】
したがって、GPSプリアンブルのサブシーケンスは良好な相関性を有し、20ミリ秒の曖昧性を解消するのに採用できる。パターン・マッチング・アルゴリズムを用いてこれらの相関性を利用し、20ミリ秒の曖昧性を解消する。
【0077】
パターン・マッチング・アルゴリズムは、受信データ列を既知のデータ列と相関し、特定の閾値を上回る相関結果が生成された場合に、予測に信頼性を付加するアルゴリズムを用いることで達成される。このアルゴリズムは、同期ワードが後続のサブフレームに出現するという知識に依拠し、それによって検出確率を向上でき、後続のサブフレームについてさらなる相関を行うことで誤同期の確率を低減できる。
【0078】
代わりに、反復しないデータ列を選択したときは、後続サブフレームのデータ列が既知であるか予測可能な場合に同様の特性を達成できる。
【0079】
複数のサブフレームの結果を結合することで、同期ワード検出の確率が上昇する。複数のサブフレームを結合する方法の1つとして、検出閾値との比較の前に、複数のサブフレームからの相関結果を合計する。図11は、総ての衛星の信号レベルを−155dBmに設定して、GPSシミュレータにおいて試験を100回行った際のパターン・マッチングに要する時間を示す。
【0080】
要約すると、本発明に関するシステムは、20ミリ秒の曖昧性を解消するために開発されたパターン・マッチング・アルゴリズムを利用する。GPSデータ・プリアンブルの周期的な放送を利用してタイミング同期性能を強化する。
【0081】
ST−NXP GNS4500受信機プラットフォームでは、ナビゲーション解は、複数の実行可能なメカニズムを用いて、位置決定に対するSV軌道位置の確立には十分だが正確なタイミング受信機には不十分な100ミリ秒超に時間を収束する。4つ以上の衛星が存在する場合、ナビゲーション解は、約±50ミリ秒までの時間を確立する。図12〜図18は、この時間推定値が信号条件に依存することを示す。ナビゲーション解によって与えられるこの推定値は、時間不確定性を低減するためにGPS時間再現において採用される。
【0082】
(1)GPS信号シミュレータ、(2)室内アンテナ、及び(3)減衰型屋上アンテナからの信号を用いて一連の試験を行った。大幅に減衰したマルチパス信号を含む苛酷な室内環境を模擬するために、ファイル・キャビネット内に室内アンテナを配置した。それぞれの試験を30分間行った。表1は、すべての試験に使用した初期条件を要約したものである。
【0083】
【表1】
【0084】
A−GPSリンク経由で補助データを試験受信機に供給し、3000kmの初期位置不確定性(Net Assist位置)を用いた。初期位置誤差は実際の位置から約2900kmに設定した。したがって、試験受信機に提供される初期基準位置は、実際の位置から2900kmの誤差を有する。
【0085】
ナビゲーション解の時間収束を試験するために、特別なソフトウェアを開発し、データ復調機能を無効化して、受信機が受信したGPS信号から正確なタイミングを抽出できない様にした。補助データを、AーGPSリンク経由でGN4540試験受信機に供給した。図12、図14及び図17は、GPS衛星捕捉後、ナビゲーション解により、どの様に時間が収束するかを示している。
【0086】
(1)GPS信号シミュレータを用いた場合
図12及び図13は、シミュレータでの結果を示す。すべての衛星の信号レベルを−155dBmに設定した。図12は、ナビゲーション解により、どの様に時間が収束するかを示し、図13は、最初の位置決定後、位置決定に使用された衛星の数を示す。
【0087】
(2)室内パッチアンテナを用いた場合
図14〜図19は室内環境での結果を示す。
【0088】
(3)減衰型屋外アンテナを用いた場合
図20及び図21は減衰型屋外アンテナを使用した場合の結果を示す。
【0089】
これらの図が示す様に、ナビゲーション解は、シミュレータの信号に関しては10ミリ秒未満まで時間を収束できる(図12)が、厳しい環境下における実際のGPS信号について、最初の位置決定後、(図14、図17及び図20に示す様に)10ミリ秒未満まで時間を収束することはない。時間推定値が所定の閾値に満たない場合、パターン・マッチング・アルゴリズムが初期化される。データ・パターンを検出し、ビット同期情報を得ると、正確なサブフレーム同期が宣言され、正確な時間が確立される。
【0090】
結果
ここで、GNS4540受信機プラットフォームの試験動作の結果をいくつか紹介する。補助データを、AーGPSリンク経由で試験受信機に供給した。試験受信機の1pps出力を監視する基地局として基準局を構成した。基準受信機の1ppsタイミング・パルスとGNS4540試験受信機の1ppsタイミング・パルスとの時間差(オフセット)を測定した。この測定を試験期間中1秒毎に行った。それぞれの試験を30分間行った。
【0091】
(1)GPS信号シミュレータ及び(2)減衰型屋上アンテナからの信号を用いて一連の試験を行った。上記表1は、これらの試験動作に使用した初期条件を要約したものである。
【0092】
(1)GPS信号シミュレータを用いた場合
図22及び図23は、シミュレータでの試験結果を示す。すべての衛星の信号レベルを−155dBmに設定した。図22は、ナビゲーション解により、どの様に時間が収束するかを示し、図23は、最初の位置決定後、位置決定に使用された衛星の数を示す。
【0093】
(2)減衰型屋上アンテナを用いた場合
図24〜図26は減衰型屋上アンテナを使用した場合の結果を示す。図24は微弱信号条件下で正確なタイミングが得られることを示す。図25はナビゲーション解に使用された衛星の数を示し、図26は試験中における総ての衛星の信号レベルを示す。
【0094】
シミュレータによる試験では、ナビゲーション解により、10ミリ秒未満まで時間精度が高くなることが示されている。この場合、ナビゲーション解がタイミング曖昧性をおよそ±10ミリ秒まで解消するため、ビット同期アルゴリズムのみで正確な時間を決定できる。しかし、マルチパス、相互相関、干渉等を含む実際の信号では、±10ミリ秒未満の精度を得られるほどナビゲーション解の信頼性は高くなく、したがって通常はサブフレーム同期アルゴリズムが必要であることを示す。
【0095】
信号レベル−155dBm、初期水平位置誤差2900km、垂直位置誤差100m、及び時間誤差2秒を設定して一連の試験を行ったところ、30分の試験時間の9割において正確な測位が行えた(試験は30分後に再開する)。最初の位置決定までの平均時間(TTFF)は6.01分であった。
【0096】
最後に、これらの結果が示すように、追加のパターン・マッチング・アルゴリズム(すなわち、補助データを必要としない)と改良型ビット同期アルゴリズムのみを用いることで、“室内”での解は、現実の条件における−155dBmの信号レベルで正確な時間を確立できる。
【0097】
上記の試験は、極めて微弱な信号条件下で正確なタイミングを達成できることを示している。とりわけ、本発明は(必ずしも補助データを必要としない)パターン・マッチング・アルゴリズムを利用して、−155dBmという微弱な入力信号について正確な時間を確立する。本発明は、また、上述した様に、改良型ビット同期アルゴリズムをも含む。
【0098】
1つの態様において、本発明は、符号が直接的に明確な疑似距離測定を与えないGNSSシステムの疑似距離測定から正確な時間を確立する方法として要約される。(内部情報源及び外部情報源からの)エフェメリス及びアルマナックを含む補助データを使用する。
【0099】
この方法は、GNSS受信機において、複数の衛星をトラッキングし、部分疑似距離測定、ドップラー測定及び曖昧性解消アルゴリズムを用いて、これら測定値及び補助データと最も適合する位置−速度−時間(PVT)の推定値を提供するステップを実行し、時間解は、少数のデータ・ビットに等しい時間不確定性の範囲を提供する。
【0100】
周波数トラッキング・ループからのフィードバックによって支援される高感度データ・ビット同期アルゴリズムを使用することで、ドップラー・シフトにより受け入れ可能な時定数より長い時定数を許容できる。
【0101】
この方法は、それぞれが、期待される周波数ループの安定性の逆数にほぼ等しい長さを有し、かつ、良好な自己相関特性を有する一連のデータ列を識別することを含む。この方法はさらに、GNSS受信機の時間解の不確定性によって制限される少数の選択的遅延を有するデータ・ビットと同期して、これら既知の、提供された、或いは、予測されたデータ列を入力信号と相関することを含む。
【0102】
最も可能性のある遅延を識別するために、複数のデータ列にわたってインコヒーレントな方法を用いたさらなる相関を採用しても良い。
【0103】
その後、少なくとも1つの衛星からのビット同期及びデータ遅延時間と、元のPVT解の近似時間とを結合することで、符号トラッキングの精度で決定される最終的な精度まで時間解を確立する(この結合はカルマン・フィルタで実施できる)。
【特許請求の範囲】
【請求項1】
全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムであって、
複数の衛星からの符号変調信号を受信し、ダウン・コンバートする無線周波数部、及び、各衛星との不完全な疑似距離の測定値を含む信号を提供するために、ダウン・コンバートした衛星信号を受信し、トラッキングし、復号化する相関器を有する衛星信号受信機と、
前記受信してダウン・コンバートした衛星信号及び前記不完全な疑似距離の測定値を含む信号のほかに、情報源から補助データを含む信号を受信し、前記受信した衛星信号が搬送するデータ・ビット・ストリームのビット・エッジを識別するデータ・ビット同期を実行し、時間曖昧性を解消するために、前記データ・ストリーム中の事前に選択したデータ列との相関を実行し、前記補助データ、前記衛星信号受信機からの前記不完全な疑似距離の測定値及び符号トラッキング出力、前記データ・ビット同期、並びに、前記データ列との相関に基づいて時間基準信号を計算する様に構成されたデータ処理部と、
を備えていることを特徴とするシステム。
【請求項2】
衛星の移動により生じるドップラー・シフトを示すドップラー・シフト信号を生成する様に動作可能な周波数ロック・ループを含み、
前記データ処理部は、前記ドップラー・シフト信号に応答して、前記データ・ビット同期を修正する様に構成される、
ことを特徴とする請求項1に記載のシステム。
【請求項3】
前記データ処理部は、
(i)前記不完全な疑似距離の測定値及びドップラー測定値から生成される、位置−速度−時間の推定値と、前記測定値及び前記補助データに最も適合する値を提供する曖昧性解消アルゴリズムと、を用いて、前記低周波データ・ストリームの1から5データ・ビットの期間に等しい時間不確定性を有する予備的な時間解を提供し、
(ii)前記データ・ビット同期の結果及び前記衛星信号受信機が信号を受信する衛星より選択した1つの衛星からの信号と、事前に選択したデータ列との相関の結果を用いて、中間的な曖昧性解消と時間解の調整を実行し、
(iii)前記時間基準信号を生成するために、前記符号トラッキング出力に応答して前記時間解のさらなる調整を行う、
様に構成されている、
ことを特徴とする請求項1又は2に記載のシステム。
【請求項4】
前記事前に選択したデータ列は、反復データ・パターンを含み、
前記衛星信号受信機が信号を受信する衛星の少なくとも1つの衛星から受信する信号におけるデータ・ストリーム中の反復データ・パターンの連続する時間における相関を、前記データ列の相関が含む様に、前記データ処理部は構成される、
ことを特徴とする請求項1から3のいずれか1項に記載のシステム。
【請求項5】
前記事前に選択したデータ列は、前記補助データ、以前に受信したデータ列に基づく予測、或いは、その両方から前記相関を実行中に選択され、
前記データ処理部は、潜在的なデータ列のデータ・パターンの自己相関を実行することにより、前記選択を実行する様に構成され、
前記選択は、自己相関の平均値又は二番目の値に対する自己相関の最大値の品質に基づいて行われる、
ことを特徴とする請求項1から3のいずれか1項に記載のシステム。
【請求項6】
前記相関は、コヒーレント積分及びインコヒーレント積分の組み合わせにより実行される、
ことを特徴とする請求項4又は5に記載のシステム。
【請求項7】
前記データ処理部は、±11ミリ秒より悪い時間精度を持つ予備的な、位置−速度−時間解を提供し、
前記解は、複数の疑似距離の伝送時間解オプションの形式であり、その1つは±3ミリ秒より良い時間精度を有する、
ことを特徴とする請求項1又は2に記載のシステム。
【請求項8】
周波数ロック・ループを備えており、
前記データ処理部は、前記周波数ロック・ループの周波数安定性の逆数以下の間隔に渡るコヒーレント積分を用いて前記事前に選択したデータ列の相関を実行する様に構成されている、
ことを特徴とする請求項1から7のいずれか1項に記載のシステム。
【請求項9】
前記少なくとも1つのオプションの選択が、前記コヒーレント積分の間隔より長い間隔に渡る、前記コヒーレント積分の結果のインコヒーレント積分を含む様に、前記データ処理部は構成されている、
ことを特徴とする請求項8に記載のシステム。
【請求項10】
前記データ列は、予め決定した相関特性により事前に選択されたものである、
ことを特徴とする請求項1から9のいずれか1項に記載のシステム。
【請求項11】
前記事前に選択したデータ列は、自己相関処理により選択されている、
ことを特徴とする請求項1から10のいずれか1項に記載のシステム。
【請求項12】
前記データ列は、前記データ列と、基準列とのアライメントと、ミスアライメントとの識別能力により事前に選択されたものである、
ことを特徴とする請求項1から9のいずれか1項に記載のシステム。
【請求項13】
前記データ列は、自己相関の識別能力により事前に選択されたものである、
ことを特徴とする請求項12に記載のシステム。
【請求項14】
全地球的航法衛星群によって生成された信号から時間基準信号を生成する方法であって、
(a)複数の受信機出力信号を生成するために、衛星群の複数の衛星が送信した信号を受信し、ダウン・コンバートし、トラッキングし、前記直接受信した衛星信号のほかに情報源から補助データを受信し、前記受信機出力信号及び前記補助データから予備的な時間解を示す信号を生成するステップと、
(b)前記予備的な時間解における時間の曖昧性を解消するために、前記複数の衛星の少なくとも1つの衛星が送信した信号が搬送するデータ・ストリーム中の事前に選択したデータ列との相関を求め、これにより±1ミリ秒より高い精度で時間を表す時間基準信号を生成するステップと、
を含むことを特徴とする方法。
【請求項15】
全地球的航法衛星群によって生成された信号から時間基準信号を生成する方法であって、
(a)複数の受信機出力信号を生成するために、衛星群の複数の衛星が送信した信号を受信し、ダウン・コンバートし、トラッキングし、前記直接受信した衛星信号のほかに情報源から補助データを受信し、前記受信機出力信号及び前記補助データから予備的な時間解を示す信号を生成するステップと、
(b)前記複数の衛星の少なくとも1つの衛星が送信した信号が搬送するデータ・ストリームのビット・エッジを識別するデータ・ビット同期を実行するステップと、
を含み、
前記データ・ビット同期は、受信した前記データ・ストリームのサンプルの周波数シフト補正積分を実行することを含む、
ことを特徴とする方法。
【請求項16】
全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムであって、
複数の衛星からの符号変調信号を受信し、ダウン・コンバートする無線周波数部、及び、各衛星との不完全な疑似距離の測定値を含む信号を提供するために、ダウン・コンバートした衛星信号を受信し、トラッキングし、復号化する相関器を有する衛星信号受信機と、
前記受信してダウン・コンバートした衛星信号及び前記不完全な疑似距離の測定値を含む信号のほかに、情報源から補助データを含む信号を受信し、前記受信した衛星信号が搬送するデータ・ビット・ストリームのビット・エッジを識別するデータ・ビット同期を実行し、前記無線信号受信機が前記複数の衛星から受信した信号の到着時間の測定値を用いて、位置−速度−時間解を計算し、前記受信してダウン・コンバートした衛星信号の前記データ・ビット・ストリームと、事前に選択したデータ列との相関を実行し、時間基準信号を計算するために、前記データ・ビット同期、前記位置−速度−時間解、並びに、前記データ・ビット・ストリームの相関の3つの総てを使用する様に構成されたデータ処理部と、
を備えていることを特徴とするシステム。
【請求項1】
全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムであって、
複数の衛星からの符号変調信号を受信し、ダウン・コンバートする無線周波数部、及び、各衛星との不完全な疑似距離の測定値を含む信号を提供するために、ダウン・コンバートした衛星信号を受信し、トラッキングし、復号化する相関器を有する衛星信号受信機と、
前記受信してダウン・コンバートした衛星信号及び前記不完全な疑似距離の測定値を含む信号のほかに、情報源から補助データを含む信号を受信し、前記受信した衛星信号が搬送するデータ・ビット・ストリームのビット・エッジを識別するデータ・ビット同期を実行し、時間曖昧性を解消するために、前記データ・ストリーム中の事前に選択したデータ列との相関を実行し、前記補助データ、前記衛星信号受信機からの前記不完全な疑似距離の測定値及び符号トラッキング出力、前記データ・ビット同期、並びに、前記データ列との相関に基づいて時間基準信号を計算する様に構成されたデータ処理部と、
を備えていることを特徴とするシステム。
【請求項2】
衛星の移動により生じるドップラー・シフトを示すドップラー・シフト信号を生成する様に動作可能な周波数ロック・ループを含み、
前記データ処理部は、前記ドップラー・シフト信号に応答して、前記データ・ビット同期を修正する様に構成される、
ことを特徴とする請求項1に記載のシステム。
【請求項3】
前記データ処理部は、
(i)前記不完全な疑似距離の測定値及びドップラー測定値から生成される、位置−速度−時間の推定値と、前記測定値及び前記補助データに最も適合する値を提供する曖昧性解消アルゴリズムと、を用いて、前記低周波データ・ストリームの1から5データ・ビットの期間に等しい時間不確定性を有する予備的な時間解を提供し、
(ii)前記データ・ビット同期の結果及び前記衛星信号受信機が信号を受信する衛星より選択した1つの衛星からの信号と、事前に選択したデータ列との相関の結果を用いて、中間的な曖昧性解消と時間解の調整を実行し、
(iii)前記時間基準信号を生成するために、前記符号トラッキング出力に応答して前記時間解のさらなる調整を行う、
様に構成されている、
ことを特徴とする請求項1又は2に記載のシステム。
【請求項4】
前記事前に選択したデータ列は、反復データ・パターンを含み、
前記衛星信号受信機が信号を受信する衛星の少なくとも1つの衛星から受信する信号におけるデータ・ストリーム中の反復データ・パターンの連続する時間における相関を、前記データ列の相関が含む様に、前記データ処理部は構成される、
ことを特徴とする請求項1から3のいずれか1項に記載のシステム。
【請求項5】
前記事前に選択したデータ列は、前記補助データ、以前に受信したデータ列に基づく予測、或いは、その両方から前記相関を実行中に選択され、
前記データ処理部は、潜在的なデータ列のデータ・パターンの自己相関を実行することにより、前記選択を実行する様に構成され、
前記選択は、自己相関の平均値又は二番目の値に対する自己相関の最大値の品質に基づいて行われる、
ことを特徴とする請求項1から3のいずれか1項に記載のシステム。
【請求項6】
前記相関は、コヒーレント積分及びインコヒーレント積分の組み合わせにより実行される、
ことを特徴とする請求項4又は5に記載のシステム。
【請求項7】
前記データ処理部は、±11ミリ秒より悪い時間精度を持つ予備的な、位置−速度−時間解を提供し、
前記解は、複数の疑似距離の伝送時間解オプションの形式であり、その1つは±3ミリ秒より良い時間精度を有する、
ことを特徴とする請求項1又は2に記載のシステム。
【請求項8】
周波数ロック・ループを備えており、
前記データ処理部は、前記周波数ロック・ループの周波数安定性の逆数以下の間隔に渡るコヒーレント積分を用いて前記事前に選択したデータ列の相関を実行する様に構成されている、
ことを特徴とする請求項1から7のいずれか1項に記載のシステム。
【請求項9】
前記少なくとも1つのオプションの選択が、前記コヒーレント積分の間隔より長い間隔に渡る、前記コヒーレント積分の結果のインコヒーレント積分を含む様に、前記データ処理部は構成されている、
ことを特徴とする請求項8に記載のシステム。
【請求項10】
前記データ列は、予め決定した相関特性により事前に選択されたものである、
ことを特徴とする請求項1から9のいずれか1項に記載のシステム。
【請求項11】
前記事前に選択したデータ列は、自己相関処理により選択されている、
ことを特徴とする請求項1から10のいずれか1項に記載のシステム。
【請求項12】
前記データ列は、前記データ列と、基準列とのアライメントと、ミスアライメントとの識別能力により事前に選択されたものである、
ことを特徴とする請求項1から9のいずれか1項に記載のシステム。
【請求項13】
前記データ列は、自己相関の識別能力により事前に選択されたものである、
ことを特徴とする請求項12に記載のシステム。
【請求項14】
全地球的航法衛星群によって生成された信号から時間基準信号を生成する方法であって、
(a)複数の受信機出力信号を生成するために、衛星群の複数の衛星が送信した信号を受信し、ダウン・コンバートし、トラッキングし、前記直接受信した衛星信号のほかに情報源から補助データを受信し、前記受信機出力信号及び前記補助データから予備的な時間解を示す信号を生成するステップと、
(b)前記予備的な時間解における時間の曖昧性を解消するために、前記複数の衛星の少なくとも1つの衛星が送信した信号が搬送するデータ・ストリーム中の事前に選択したデータ列との相関を求め、これにより±1ミリ秒より高い精度で時間を表す時間基準信号を生成するステップと、
を含むことを特徴とする方法。
【請求項15】
全地球的航法衛星群によって生成された信号から時間基準信号を生成する方法であって、
(a)複数の受信機出力信号を生成するために、衛星群の複数の衛星が送信した信号を受信し、ダウン・コンバートし、トラッキングし、前記直接受信した衛星信号のほかに情報源から補助データを受信し、前記受信機出力信号及び前記補助データから予備的な時間解を示す信号を生成するステップと、
(b)前記複数の衛星の少なくとも1つの衛星が送信した信号が搬送するデータ・ストリームのビット・エッジを識別するデータ・ビット同期を実行するステップと、
を含み、
前記データ・ビット同期は、受信した前記データ・ストリームのサンプルの周波数シフト補正積分を実行することを含む、
ことを特徴とする方法。
【請求項16】
全地球的航法衛星群によって生成された信号から時間基準を生成する時間基準システムであって、
複数の衛星からの符号変調信号を受信し、ダウン・コンバートする無線周波数部、及び、各衛星との不完全な疑似距離の測定値を含む信号を提供するために、ダウン・コンバートした衛星信号を受信し、トラッキングし、復号化する相関器を有する衛星信号受信機と、
前記受信してダウン・コンバートした衛星信号及び前記不完全な疑似距離の測定値を含む信号のほかに、情報源から補助データを含む信号を受信し、前記受信した衛星信号が搬送するデータ・ビット・ストリームのビット・エッジを識別するデータ・ビット同期を実行し、前記無線信号受信機が前記複数の衛星から受信した信号の到着時間の測定値を用いて、位置−速度−時間解を計算し、前記受信してダウン・コンバートした衛星信号の前記データ・ビット・ストリームと、事前に選択したデータ列との相関を実行し、時間基準信号を計算するために、前記データ・ビット同期、前記位置−速度−時間解、並びに、前記データ・ビット・ストリームの相関の3つの総てを使用する様に構成されたデータ処理部と、
を備えていることを特徴とするシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7a】
【図7b】
【図7c】
【図7d】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7a】
【図7b】
【図7c】
【図7d】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公表番号】特表2012−503176(P2012−503176A)
【公表日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2011−526559(P2011−526559)
【出願日】平成21年9月17日(2009.9.17)
【国際出願番号】PCT/GB2009/002231
【国際公開番号】WO2010/032014
【国際公開日】平成22年3月25日(2010.3.25)
【出願人】(510000633)エスティー‐エリクソン、ソシエテ、アノニム (59)
【Fターム(参考)】
【公表日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成21年9月17日(2009.9.17)
【国際出願番号】PCT/GB2009/002231
【国際公開番号】WO2010/032014
【国際公開日】平成22年3月25日(2010.3.25)
【出願人】(510000633)エスティー‐エリクソン、ソシエテ、アノニム (59)
【Fターム(参考)】
[ Back to top ]