
時間領域法を用いた二重偏波レーダ処理システム
本発明の実施形態では、二重偏波レーダシステムにおける環境パラメータの改良された推定を提供する。いくつかの実施形態では、環境パラメータは、2つの直交する偏波状態において受信されたデータの線形結合を用いて推定されうる。特に、発明の実施形態は、二重偏波レーダシステムにおける地上反射波及びノイズの低減を改良する。さらに、発明の実施形態はまた、二重偏波レーダシステムにおける、反射率の差及び/または同極の相関係数の大きさの少なくともいずれか、及び位相差を決定するためのシステムを提供する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、時間領域法を用いた二重偏波レーダ処理システムに関する。
【背景技術】
【0002】
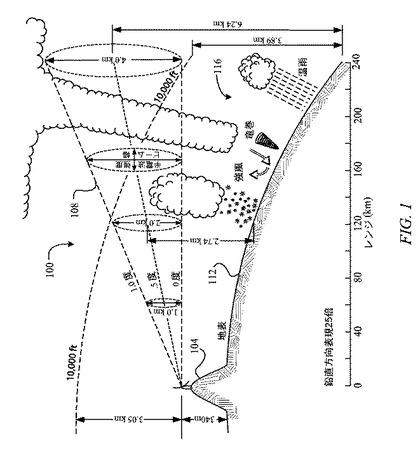
気象レーダシステムの基本的な目的の1つは、降水の定量的な測定結果を提供するために、地球を取り巻く大気をサンプリングすることである。従前の気象レーダは、しばしば100キロメートルオーダーの長距離に渡るカバレッジを提供する。従前のレーダシステムがどのように機能するかは、図1に概略的に図示されている。本図において、レーダは、丘や山104のような隆起した地理的特徴の頂上に配置されている。レーダは、距離に応じてほぼ線形的に分散する電磁ビーム108を生成する。故に図には、レーダからの距離に応じて、ビーム幅がどのように増加するかが示されている。システム100がサンプリングしようと試みる、存在しうる様々な気象パターンの例116は、地球の表面112上の異なる位置に示されている。
【0003】
気象レーダでは、地上標的からの信号は、反射波(clutter)として表される。レーダ信号の品質及び定量適利用を改良するためには、レーダ信号全体における反射波の影響を低減することが一般的に望ましい。このような低減は、ドップラー周波数が0周辺のノッチフィルタを適用することにより従来達成されてきた。このような手法による主な不都合は、気象エコーが小さな視線速度を有する場合における信号損失である。レーダ信号処理における近年の進展は、反射波の抑圧における改良である。例えば、1つの方法は、点在するスペクトル線上を補間する、進化したスペクトルフィルタを用いることにより、点在する効果を補う方法である。スペクトルフィルタ技術の制限は、スペクトルモーメント推定において、制限されたサンプリング長により引き起こされるスペクトル漏損の影響である。結果として、反射波対信号比を調整するために、スペクトル処理は成功する反射波抑圧を制限する。
【発明の概要】
【課題を解決するための手段】
【0004】
発明の実施形態では、レーダ観測において、地上からの反射波及びノイズの少なくともいずれかを低減するために、二重偏波パラメータ時間領域法(「DPTDM」:dual-polarization parametric time-domain method)を用いる。それ故、このような実施形態では、二重偏波レーダを用いて注目領域を調査する方法を提供する。レーダ信号は、2つの偏波状態で注目領域に伝播され、後方散乱データは2つの偏波状態で受信される。いくつかの実施形態では、2つの偏波状態は直交関係をなす。時系列データのスペクトルモーメントは、2つの偏波状態のそれぞれについて計算されうる。2つの偏波状態におけるデータを線形結合する新たな時系列は構築されうる。いくつかの実施形態において、2つの偏波状態におけるデータの線形結合は、複素数の値となりうる。同極の相関係数の大きさ及び位相は、線形結合時系列の尤度関数を最大化することにより決定されうる。
【0005】
いくつかの実施形態において、2つの偏波状態におけるデータの線形結合は、Vα=Vh+αVvにより表され、尤度関数は、
(1)
で表されうる。ここで、
である。尤度関数の最大値は、xに関してLαの差を解くことにより決定されうる。いくつかの実施形態において、同極の相関係数実数及び虚数部は、αが実数である場合、
(2)
及び、α=jβである場合、
(3)
で決定されうる。いくつかの実施形態において、α及びβの整数値は±1に設定され、α及びβの後続値は
(4)
で決定されうる。
【0006】
故に、発明の様々な実施形態は、直交する偏波状態において受信されたレーダデータの線形結合を用いて、環境係数の判定を提供する。特に、地上からの反射波及びノイズの低減効果は、本明細書に示される実施形態を用いることにより増加されうる。
【図面の簡単な説明】
【0007】
【図1】従来のレーダシステムの実施の略図を示す。(全米科学アカデミーのレポート「複合地域にわたる鉄砲水の予測」から複製した)
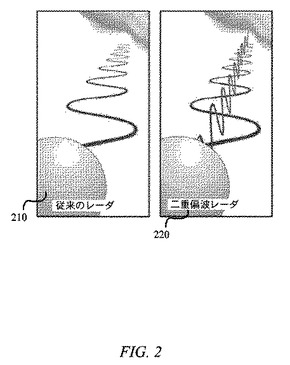
【図2】従来のレーダシステムと二重偏波レーダシステムとを比較した図を示している。
【図3A】、
【図3B】いくつかの実施形態に係る、二重偏波レーダシステムの送信機側の簡略化されたブロック図を示す。
【図4】いくつかの実施形態に係る、二重偏波レーダシステムの受信機側の簡略化されたブロック図を示す。
【図5】いくつかの実施形態に係る、二重偏波レーダを用いて注目領域の状態を定義する処理のフローチャートを示す。
【図6】いくつかの実施形態に係る、反射率の差、同極の相関係数(|ρco|)、及び伝播位相差(Φdp)の少なくともいずれかを決定する処理のフローチャートを示す。
【図7】いくつかの実施形態に係る、線形結合データαにおける係数を推定するフローチャートを示す。
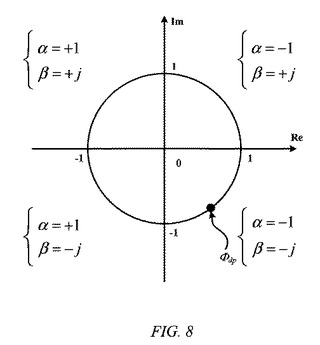
【図8】推定された伝播位相差(Φdp)の位置とαの初期選択との間の対応を示す。
【図9A】、
【図9B】、
【図9C】パルス対処理(9A)、スペクトルフィルタ(9B)、及び本明細書において述べられる二重偏波パラメータ時間領域法(9C)をそれぞれ用いて、注目領域における反射率の差の比較を示している。
【図9D】、
【図9E】、
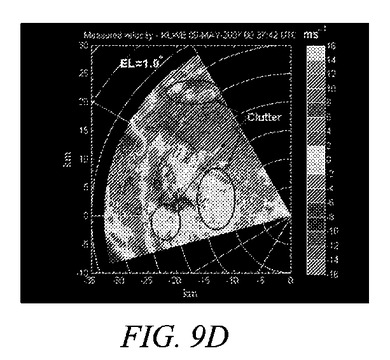
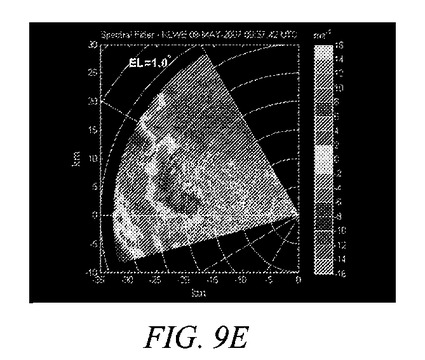
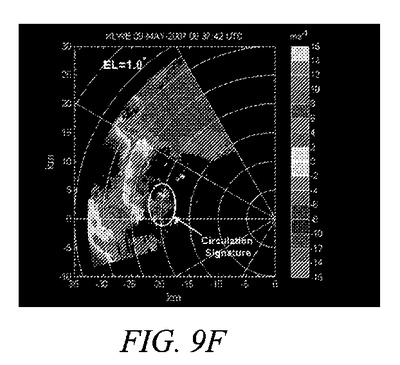
【図9F】パルス対処理(9D)、スペクトルフィルタ(9E)、及び本明細書において述べられる二重偏波パラメータ時間領域法(9F)をそれぞれ用いて、注目領域における速度計測結果の差の比較を示している。
【図10A】、
【図10B】、
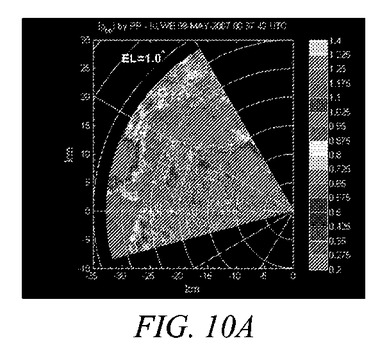
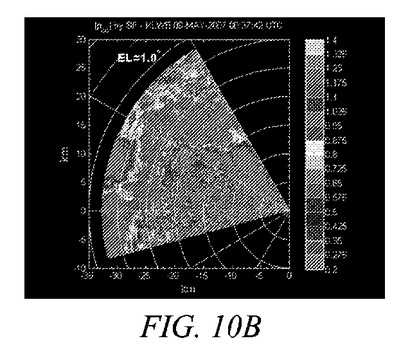
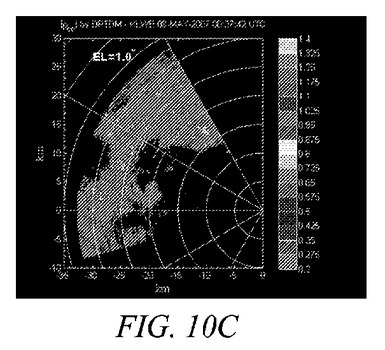
【図10C】パルス対処理(10A)、スペクトルフィルタ(10B)、及び本明細書において述べられる二重偏波パラメータ時間領域法(10C)をそれぞれ用いて、注目領域における伝播位相差(Φdp)の計測結果の比較を示している。
【図10D】、
【図10E】、
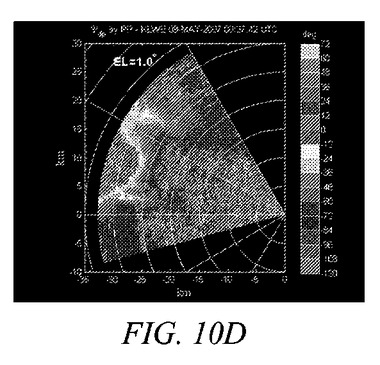
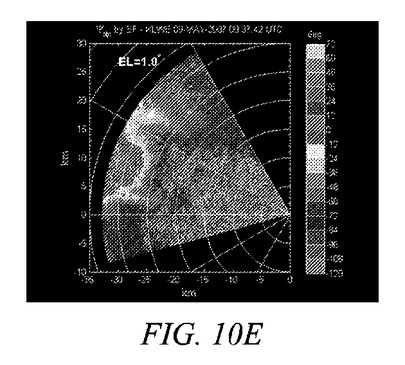
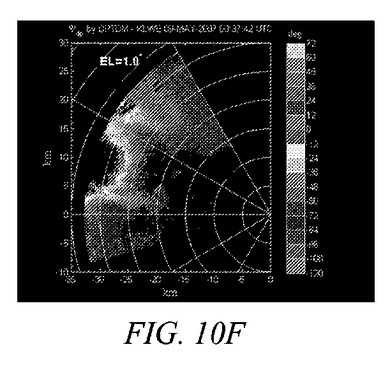
【図10F】パルス対処理(10D)、スペクトルフィルタ(10E)、及び本明細書において述べられる二重偏波パラメータ時間領域法(10F)をそれぞれ用いて、注目領域における同極の相関係数(ρco)の計測結果の比較を示している。
【図11A】、
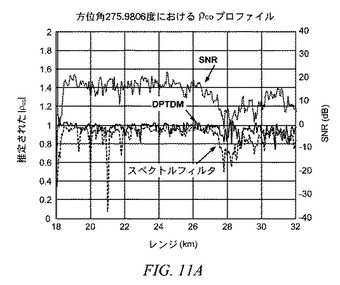
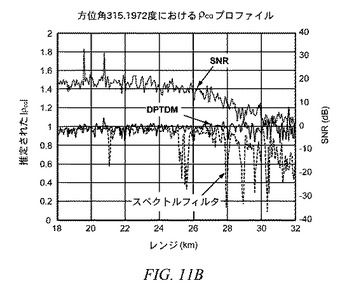
【図11B】本明細書に記載された実施形態を用いて、方位角275度及び315度における推定されたρcoのレンジプロファイルを示している。
【図12A】、
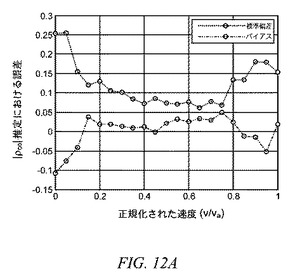
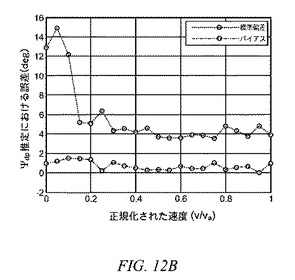
【図12B】本明細書に記載された実施形態を用いて推定する|ρco|及びΦdpにおける誤差を示している。
【発明を実施するための形態】
【0008】
発明のいくつかの実施形態は、二重偏波パラメータ時間領域法を用いて、注目領域内の環境パラメータを決定するシステムを提供する。従来技術は、単一偏波及び二重偏波の少なくともいずれかのレーダデータにおける、様々なパラメータを推定しうる、パラメータ時間領域法(PTDM:parametric time domain method)により提供していた。このような方法及び/またはシステムは、2007年7月30日に出願された、「パラメータ時間領域法を用いた地上反射波低減(Ground Clutter Mitigation Using a Parametric Time Domain Method)」と題された米国特許公開第11/830574号公報において示されており、当該公報の全記載は、引用により本明細書に組み込まれる。PTDMは、それぞれの偏波について、受信されたレーダデータにおける、反射波、降水、及びノイズの良好なモデルを提供する。しかしながら、PTDMは、偏波されたデータ間における相関性を考慮していない。発明のいくつかの実施形態では、2つの偏波チャネル間の相関性を調査するためにモデル及び推定量を提供する。
【0009】
図2は、単一偏波状態を有する従来のレーダシステム210と、二重偏波レーダシステム220(あるいは偏波レーダシステム)との比較する図を示している。二重偏波レーダシステム220は、しばしば図においては垂直偏波及び水平偏波として示される、2つの直交する偏波状態を送信及び受信することができる。二重偏波レーダシステムは、反射率の差、同極の相関係数、線形減極比、及び特定の位相差の少なくともいずれかを含む、気象学の多くの重要なパラメータを提供しうる。
【0010】
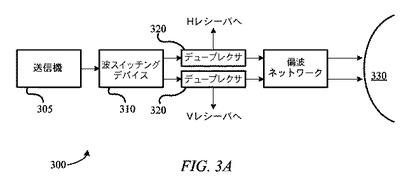
図3Aは、いくつかの実施形態に係る二重偏波レーダシステムの送信機側の簡略的なブロック図300を示している。このような送信機は、パルス対パルス基準において、あらゆる2つの直交する偏波状態間の偏波状態を切り替えることができる。送信機305は、導波路スイッチングデバイス310に、信号及び波形信号の少なくともいずれかを、提供及び/または送信することができる。波スイッチングデバイス310は、高出力導波路スイッチである。波スイッチングデバイス310は、波形信号の所望の偏波に基づいて、送信機305からデュープレクサ(duplexer)320への送信を切り替えうる。波スイッチングデバイス310は例えば、機械式モータ駆動回転翼スイッチ、及び電気制御フェライトサーキュレータスイッチの少なくともいずれかを含みうる。
【0011】
デュープレクサ320は、送信波形信号から受信した信号を分離しうる。なお、受信した信号は適切な偏波受信機に送信されうる。マイクロ波偏波ネットワーク325は、アンテナ330への適切な入力波形信号を合成するために用いられうる、可変比率出力分配器及び可変位相シフトの少なくともいずれかを含みうる。
【0012】
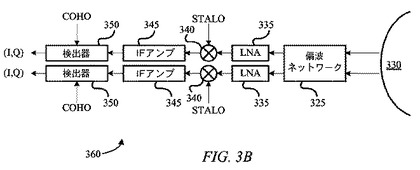
図3Bは、いくつかの実施形態に係る二重偏波レーダシステムの受信機側の簡略化されたブロック図360を示している。このような受信機は、データ共分散行列(共分散行列については後述する)の一部である、様々な項(実数及び虚数の両方)を計測しうる。マイクロ波偏波ネットワーク325は、アンテナ330からの後方散乱レーダ信号を受信し、受信した信号は、デュープレクサ320により、送信信号から二重化される。低ノイズ増幅器335は、信号フィルタのために使用されうる。それぞれの偏波チャネルのミキサ340は、固定局部発振器(STALO:stable local oscillator)を用いて受信した信号を合成するために使用されうる。中間周波数は、中間周波数増幅器345を用いて増幅され、後方散乱信号は、検出器350において両方の偏波について検出されうる。
【0013】
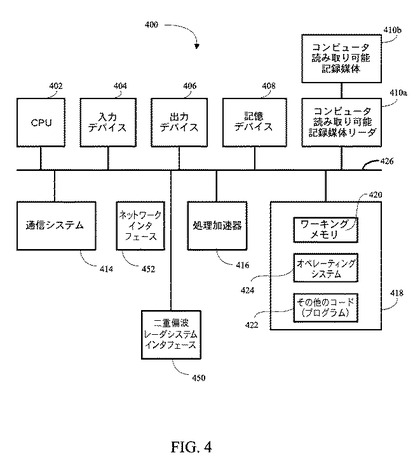
図4は発明の様々な実施形態を用いて、環境パラメータの計算をする二重偏波レーダシステムに接続されたコンピュータシステム400のブロック図を示している。コンピュータシステム400は、図2及び/または図3に示されるいかなる、あるいはすべての計算を実行するために用いられうる。図は、個々のシステム要素が、分離されて、あるいはより統合された方式でどのように実装されうるかを示している。コンピュータ400は、バス426を介して電気的に接続されたハードウェア要素を備えて示されている。ネットワークインタフェース452は、例えばインターネットのようなネットワークを通じて、計算デバイス400と他のコンピュータとを通信接続しうる。ハードウェア要素は、プロセッサ402、入力デバイス404、出力デバイス406、記憶デバイス408、コンピュータ読み取り可能記録媒体リーダ410a、通信システム414、DSPや専用プロセッサのような処理加速器416、及びメモリ418を含みうる。コンピュータ読み取り可能記録媒体410aは、さらにコンピュータ読み取り可能記録媒体410bが接続され、当該接続は、コンピュータ読み取り可能情報を含む、リモート、ローカル、固定、及び着脱可能な記憶デバイスの少なくともいずれかに加えて、一時記憶及び/または恒久記憶記録メディアを統合的に表す。
【0014】
二重偏波レーダシステムインタフェース450は、バス426に接続される。いくつかの実施形態において、二重偏波レーダシステムインタフェース450は、いかなる形式の通信インタフェースであってよい。たとえば、二重偏波レーダシステムインタフェース450は、USBインタフェース、UARTインタフェース、シリアルインタフェース、パラレルインタフェース他、であってよい。二重偏波レーダシステムインタフェース450は、二重偏波レーダシステムに直接接続されるように構成されうる。
【0015】
コンピュータシステム400は、ワーキングメモリ420内に現在は設けられているものとして示される、オペレーティングシステム、及び本明細書に記載された方法及び処理の少なくともいずれかを実装するために設計されたプログラムのようなその他のコードを含む、ソフトウェア要素も備える。いくつかの実施形態では、その他のコード442は、二重偏波レーダシステムからのユーザ入力を受信、及び本明細書に記載される様々な実施形態に係るデータを操作するための指示を提供するソフトウェアを含みうる。いくつかの実施形態において、その他のコード422は、天候事象を予測あるいは予報するソフトウェアを含む、及び/またはリアルタイムの気象予報及び警告の少なくともいずれかを提供しうる。相当な変化が特定の供給に応じて用いられうることは、同一の技術分野に属する当業者には容易に理解されるであろう。例えば、カスタマイズされたハードウェアが用いられてもよい、及び/または特定の要素は、ハードウェア、ソフトウェア(アプレットのような携帯ソフトウェアを含む)、あるいはその両方に実装されてもよい。さらに、ネットワーク入出力デバイスのような、他の計算デバイスへの接続が使用されうる。
【0016】
図3A、3B、及び図4は、特定のブロックを参照して本明細書で説明されるが、ブロックが記載の便宜上定義され、構成部品の特定の物理的装置を暗示するものではないことは理解されるべきである。さらに、ブロックは物理的に異なる構成に相当する必要はない。
【0017】
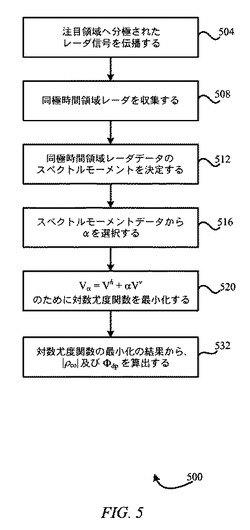
発明の方法の概要は、図5のフローチャート500を用いて提供される。方法500は、ブロック504において示されるように、二重偏波レーダ信号を注目領域に伝搬することにより開始する。サンプリングされた時系列データは、ブロック508で2つの偏波について収集され、注目領域の時間領域パラメータモデルのための二重偏波パラメータを決定する処理に用いられる。特定のモデルが以下に説明されるが、発明の代替的な実施形態では、他の二重偏波パラメータモデルを用いてもよい。
【0018】
ブロック512で、同極の時系列データのスペクトルモーメントが推定されうる。例えば、スペクトルモーメントは、本技術分野で知られているPTDM及び/またはGMAP法を用いることにより推定されうる。いくつかの実施形態では、同極データの対数尤度関数の総和は、スペクトルモーメントのために最小化され、解かれうる。他の実施形態では、同極データの対数尤度関数の総和は、スペクトルモーメントのために最大化され、解かれうる。いくつかの実施形態において、反射率の差も、2つの偏波のスペクトルモーメントから推定されうる。ブロック516で、α及びβ=jαは前回の距離ゲート(range gate)から推定された二重偏波パラメータを用いて決定されうる。ブロック520で、例えばVα=Vh+αVvの2つの偏波ベクトルの線形結合の対数尤度関数は、最小化されうる。他の実施形態において、対数尤度関数は最大化されうる。この最小化(あるいは最大化)から、同極の相関係数の大きさ及び/または位相は、ブロック532で決定されうる。
【0019】
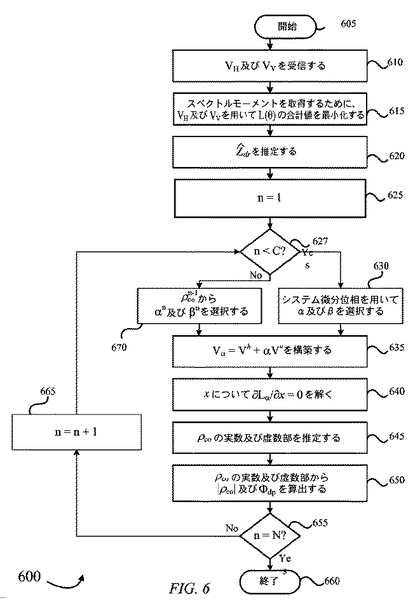
発明のいくつかの実施形態では、2つの偏波レーダデータの線形結合から、同極の相関係数の大きさ及び位相を推定しうる。このような推定はたとえば、コンピュータシステム400を用いて実行されうる。図6は、複素平面において、ρcoの偏角である、同極の相関係数(ρco)の大きさ、及び伝播位相差(Φdp)を決定するために生じうる、このような処理600のフローチャートを示している。処理600は、ブロック605で開始し、ブロック610で、2つの偏波について、注目領域の後方散乱からの電圧読み出し(voltage readings)を受信しうる。例えば、電圧読み出しは垂直偏波及び水平偏波された信号からのデータを含みうる。
【0020】
ブロック615において、VH及びVVの両方についての尤度関数の総和は、水平及び垂直スペクトルモーメントを得るために最小化される。それぞれの偏波(h,v)についての尤度関数は、
(5)
で示される。ここで、Rh,vはサンプリングレートTsにおける計測データの共分散行列であり、
(6)
で与えられ、そして
はH信号についてサンプリングされた共分散行列であり、
はV信号についてサンプリングされた共分散行列である。スペクトルモーメントは、
(7)
であり、ここで
は降水信号出力、
は降水スペクトル幅、
は降水の平均速度、
は反射波出力、
は反射波スペクトル幅、
はノイズ出力、及びλはレーダ波長を示し、jは
であり、δはクロネッカー関数である。
【0021】
2つの偏波についての降水スペクトルモーメントは、対数尤度関数を最小化することにより得られる。
(8)
スペクトルモーメントがブロック620で決定されると、
は
(9)
から決定されうる。
【0022】
カウンタnは、ブロック625で最初の距離ビン(range bin)の開始で、1に初期化される。ブロック627で、nがいくつかの予め定められた、及び/またはユーザにより定義された定数C未満であるかどうかを判定されうる。いくつかの実施形態において、Cは2、3、4、5、6、7、8、9、10他、となりうる。nがC未満である場合、α及びβは、ブロック630で、複素平面の偏角Φdpから決定されうる。最初の距離ビン(C未満のビン数)のα及びβの値は、図8において示されるように、+1あるいは−1となるように推定されうる。いくつかの実施形態において、最初のビンの偏角についての偏角Φdpは推定技術を用いて推定されうる。例えば、最初の少数のビンについては、0°<Φdp<90°の場合はα=−1及びβ=1である。90°<Φdp<180°の場合は、α=1及びβ=1である。180°<Φdp<270°の場合は、α=1及びβ=−1である。270°<Φdp<360°の場合は、α=−1及びβ=−1である。そして処理600はブロック635に進む。
【0023】
ブロック627において、nがCよりも大きかった場合、α及びα=jβは
(10)
を用いて推定されうる。数10において、
は前回の距離ビンについての同極の相関係数である。
【0024】
ブロック635で、2つの偏波ベクトルの線形結合は、
Vα=Vh+αVv (11)
として構築されうる。ここで、Vhは水平偏波信号についてサンプリングされた電圧データ、及びVvは垂直偏波信号についてサンプリングされた電圧データである。
【0025】
線形結合データVαについての対数尤度関数は、
(12)
で表される。ここで、Rcは反射波についての共分散行列、RNはノイズについての共分散行列、
は降水についての水平偏波共分散行列、
は降水についての垂直偏波共分散行列、及び
はVαについてサンプリングされた共分散行列である。
【0026】
いくつかの実施形態において、Lαはxを0に近づけることに関して、尤度関数の微分係数を設定することにより最小化されうる。
(13)
ここで、
(14)
である。結果として得られた最小化された尤度関数Lαは、同極の相関係数の実数及び虚数部の値を生成しうる。
【0027】
ブロック645で、αが実数である場合、次の式からρcoの実数部を決定することができる。
(15)
そして、αが虚数、α=jβ(βは実数)である場合、次の式からρcoの虚数部を決定することができる。
(16)
【0028】
ブロック630、620、及び640で決定されたような、α、βの値、Zdrの推定値、推定されたxを用いることにより、ブロック645で、ρcoの実数及び虚数部を得るための式15及び式16を解く。ブロック650で、ρcoの大きさ及び偏角(Φdp)は、n番目の距離ビンについての、ρcoの実数及び絶対値から決定されうる。
【0029】
ブロック655で、nがデータセットにおける距離ゲートの数Nに等しい場合、処理600はブロック660で終了する。しかしながら、nは距離ゲートの数未満である場合、nはブロック665で増加させられ、処理600はブロック627に戻る。
【0030】
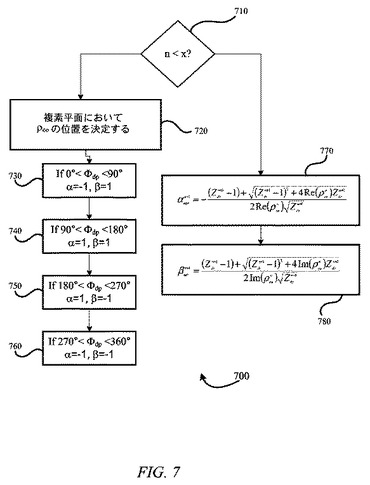
図7は、いくつかの実施形態に係る、α及びβの最適値を推定する方法700を示している。ブロック710で、処理700はビン数nが予め定められた値x未満、例えば10未満であるか否かを判定する。いくつかの実施形態において、xは1、2、3、4、5、6、7、8、9他、に等しい。nがx未満である場合、最初の少数のビンのデータを参照し、ブロック720で複素平面においてΦdpの位置からρcoを推定しうる。0°<Φdp<90°である場合、ブロック730に示されるようにα=−1及びβ=1となる。90°<Φdp<180°である場合、ブロック740に示されるようにα=1及びβ=1となる。180°<Φdp<270°である場合、ブロック750に示されるようにα=1及びβ=−1となる。270°<Φdp<360°である場合、ブロック760に示されるようにα=−1及びβ=−1となる。ビン数nが予め定められた値xより大きい場合、α及びβの最適値はブロック770及び780に示されるように決定されうる。
【0031】
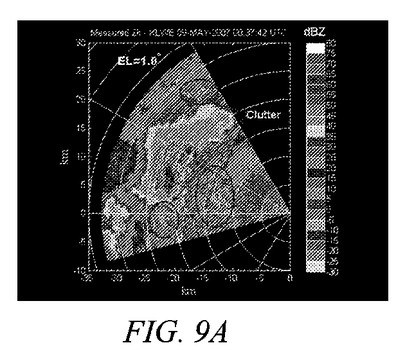
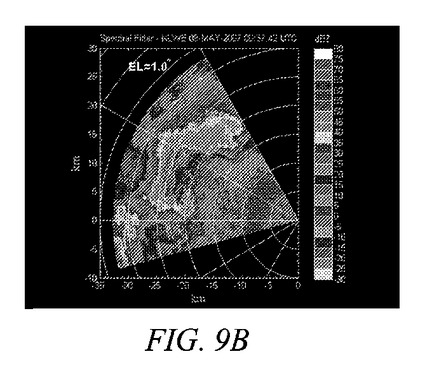
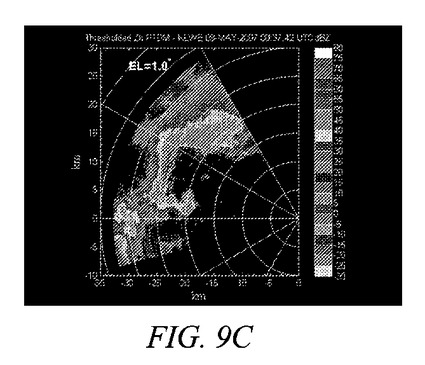
図9A乃至9Cは、パルス対処理(9A)、スペクトルフィルタ(9B)、及び本明細書に記載されるような二重偏波パラメータ時間領域法(9C)を用いた場合の、注目領域における反射率の比較を示している。図9Cに見られるように、地上反射波及びノイズの少なくともいずれかは、かなり低減されている。
【0032】
図9D乃至9Fは、パルス対処理(9D)、スペクトルフィルタ(9E)、及び本明細書に記載されるような二重偏波パラメータ時間領域法(9F)を用いた場合の、注目領域における速度計測結果の比較を示している。図9Fに見られるように、地上反射波及びノイズの少なくともいずれかは、かなり低減されている。さらに、図9Fは竜巻及び/またはハリケーンの巡回シグニチャ指標(circular signature indicative)の特性を示している。この巡回シグニチャは、図9D及び9Eに可視化したものとは異なる(あるいは起こり得ない)。
【0033】
図10A乃至10Cは、パルス対処理(10A)、スペクトルフィルタ(10B)、及び本明細書に記載されるような二重偏波パラメータ時間領域法(10C)を用いた場合の、注目領域における同極の相関係数(ρco)の計測結果の比較を示している。図10Cに見られるように、発明の実施形態を用いることにより、地上反射波及びノイズの少なくともいずれかは、かなり低減されている。
【0034】
図10D乃至10Fは、パルス対処理(10D)、スペクトルフィルタ(10E)、及び本明細書に記載されるような二重偏波パラメータ時間領域法(10F)を用いた場合の、注目領域における伝播位相差(Φdp)の計測結果の比較を示している。また図10Fに見られるように、発明の実施形態を用いることにより、地上反射波及びノイズの少なくともいずれかは、かなり低減されている。
【0035】
図11A及び11Bは、275度及び315度の方位角において、本明細書に記載された実施形態、及びGMAP法の両方を用いて推定された|ρco|についてのレンジプロファイルを示している。信号が弱い、即ちSNRが小さい箇所においてGMAPの|ρco|は低いことが示されている。さらに、反射率及び相関係数の両方の閾値化を用いることにより、GMAPでは気象エコーと反射波との間で、良好な分類が提供されていない。反射波があらわれる領域において、GMAPの|ρco|の標準偏差は非常に高い。反射波の漏損スペクトル点となりうることにより説明される。本明細書に記載のいくつかの実施形態は、時間領域において動作するため、これらの実施形態はこの漏損の問題による影響を受けない。さらに、本明細書に記載の実施形態は、GMAPよりも良好なノイズレベルを推定することができる。ノイズが信号から適切に除去されない場合、より正確に推定された|ρco|を提供することができる。
【0036】
図12A及び12Bは、本明細書に記載の実施形態を用いて16個のサンプリングデータのみにより推定されたρco及びΦdpにおける誤差を示している。図に示されるとおり、このような推定誤差は許容可能である。
【0037】
回路、論理モジュール、ブロック、プロセッサ、及び他の要素の少なくともいずれかは、様々な動作を実行するために構成されているものとしてここでは記載された。同一の技術分野に属する当業者は、構成が設計、設置、相互接続、及び/または特定の要素のプログラムの実装により、また構成された要素が異なる動作を再構成可能であってもなくてもよいように実装されることにより達成され得ることを理解するだろう。例えば、プログラム可能なプロセッサは、適切な実行可能なコードを提供することにより構成され得る、専用の論理回路は論理ゲート及び他の回路素子に適切に接続することにより構成され得る、など。
【0038】
上述した実施形態は、特定のハードウェア及びソフトウェア要素を参照したが、同一の技術分野に属する当業者は、ハードウェア及びソフトウェア要素の少なくともいずれかの異なる組み合わせが用いられてもよいし、ハードウェアに実装されるものとして記載された特定の動作はソフトウェアまたはその他の手段に実装されてもよいことは、理解するだろう。
【0039】
本発明の様々な特徴を組み入れたコンピュータプログラムは、様々なコンピュータ読み取り可能な記録媒体に符号化されてもよい。適切な媒体は、磁気ディスクあるいはテープ、CDやDVDのような光学記録媒体、フラッシュメモリ等である。プログラムコードが符号化されたコンピュータ読み取り可能な記録媒体は、互換デバイスにパッケージされてもよいし、他のデバイスに分割されて提供されてもよい。さらにプログラムコードは符号化され、インターネットを含む様々なプロトコルに適合する有線及び/または無線ネットワークを介して送信されてもよく、これにより例えばインターネットダウンロード等の手段で配布してもよい。
【技術分野】
【0001】
本発明は、時間領域法を用いた二重偏波レーダ処理システムに関する。
【背景技術】
【0002】
気象レーダシステムの基本的な目的の1つは、降水の定量的な測定結果を提供するために、地球を取り巻く大気をサンプリングすることである。従前の気象レーダは、しばしば100キロメートルオーダーの長距離に渡るカバレッジを提供する。従前のレーダシステムがどのように機能するかは、図1に概略的に図示されている。本図において、レーダは、丘や山104のような隆起した地理的特徴の頂上に配置されている。レーダは、距離に応じてほぼ線形的に分散する電磁ビーム108を生成する。故に図には、レーダからの距離に応じて、ビーム幅がどのように増加するかが示されている。システム100がサンプリングしようと試みる、存在しうる様々な気象パターンの例116は、地球の表面112上の異なる位置に示されている。
【0003】
気象レーダでは、地上標的からの信号は、反射波(clutter)として表される。レーダ信号の品質及び定量適利用を改良するためには、レーダ信号全体における反射波の影響を低減することが一般的に望ましい。このような低減は、ドップラー周波数が0周辺のノッチフィルタを適用することにより従来達成されてきた。このような手法による主な不都合は、気象エコーが小さな視線速度を有する場合における信号損失である。レーダ信号処理における近年の進展は、反射波の抑圧における改良である。例えば、1つの方法は、点在するスペクトル線上を補間する、進化したスペクトルフィルタを用いることにより、点在する効果を補う方法である。スペクトルフィルタ技術の制限は、スペクトルモーメント推定において、制限されたサンプリング長により引き起こされるスペクトル漏損の影響である。結果として、反射波対信号比を調整するために、スペクトル処理は成功する反射波抑圧を制限する。
【発明の概要】
【課題を解決するための手段】
【0004】
発明の実施形態では、レーダ観測において、地上からの反射波及びノイズの少なくともいずれかを低減するために、二重偏波パラメータ時間領域法(「DPTDM」:dual-polarization parametric time-domain method)を用いる。それ故、このような実施形態では、二重偏波レーダを用いて注目領域を調査する方法を提供する。レーダ信号は、2つの偏波状態で注目領域に伝播され、後方散乱データは2つの偏波状態で受信される。いくつかの実施形態では、2つの偏波状態は直交関係をなす。時系列データのスペクトルモーメントは、2つの偏波状態のそれぞれについて計算されうる。2つの偏波状態におけるデータを線形結合する新たな時系列は構築されうる。いくつかの実施形態において、2つの偏波状態におけるデータの線形結合は、複素数の値となりうる。同極の相関係数の大きさ及び位相は、線形結合時系列の尤度関数を最大化することにより決定されうる。
【0005】
いくつかの実施形態において、2つの偏波状態におけるデータの線形結合は、Vα=Vh+αVvにより表され、尤度関数は、
(1)
で表されうる。ここで、
である。尤度関数の最大値は、xに関してLαの差を解くことにより決定されうる。いくつかの実施形態において、同極の相関係数実数及び虚数部は、αが実数である場合、
(2)
及び、α=jβである場合、
(3)
で決定されうる。いくつかの実施形態において、α及びβの整数値は±1に設定され、α及びβの後続値は
(4)
で決定されうる。
【0006】
故に、発明の様々な実施形態は、直交する偏波状態において受信されたレーダデータの線形結合を用いて、環境係数の判定を提供する。特に、地上からの反射波及びノイズの低減効果は、本明細書に示される実施形態を用いることにより増加されうる。
【図面の簡単な説明】
【0007】
【図1】従来のレーダシステムの実施の略図を示す。(全米科学アカデミーのレポート「複合地域にわたる鉄砲水の予測」から複製した)
【図2】従来のレーダシステムと二重偏波レーダシステムとを比較した図を示している。
【図3A】、
【図3B】いくつかの実施形態に係る、二重偏波レーダシステムの送信機側の簡略化されたブロック図を示す。
【図4】いくつかの実施形態に係る、二重偏波レーダシステムの受信機側の簡略化されたブロック図を示す。
【図5】いくつかの実施形態に係る、二重偏波レーダを用いて注目領域の状態を定義する処理のフローチャートを示す。
【図6】いくつかの実施形態に係る、反射率の差、同極の相関係数(|ρco|)、及び伝播位相差(Φdp)の少なくともいずれかを決定する処理のフローチャートを示す。
【図7】いくつかの実施形態に係る、線形結合データαにおける係数を推定するフローチャートを示す。
【図8】推定された伝播位相差(Φdp)の位置とαの初期選択との間の対応を示す。
【図9A】、
【図9B】、
【図9C】パルス対処理(9A)、スペクトルフィルタ(9B)、及び本明細書において述べられる二重偏波パラメータ時間領域法(9C)をそれぞれ用いて、注目領域における反射率の差の比較を示している。
【図9D】、
【図9E】、
【図9F】パルス対処理(9D)、スペクトルフィルタ(9E)、及び本明細書において述べられる二重偏波パラメータ時間領域法(9F)をそれぞれ用いて、注目領域における速度計測結果の差の比較を示している。
【図10A】、
【図10B】、
【図10C】パルス対処理(10A)、スペクトルフィルタ(10B)、及び本明細書において述べられる二重偏波パラメータ時間領域法(10C)をそれぞれ用いて、注目領域における伝播位相差(Φdp)の計測結果の比較を示している。
【図10D】、
【図10E】、
【図10F】パルス対処理(10D)、スペクトルフィルタ(10E)、及び本明細書において述べられる二重偏波パラメータ時間領域法(10F)をそれぞれ用いて、注目領域における同極の相関係数(ρco)の計測結果の比較を示している。
【図11A】、
【図11B】本明細書に記載された実施形態を用いて、方位角275度及び315度における推定されたρcoのレンジプロファイルを示している。
【図12A】、
【図12B】本明細書に記載された実施形態を用いて推定する|ρco|及びΦdpにおける誤差を示している。
【発明を実施するための形態】
【0008】
発明のいくつかの実施形態は、二重偏波パラメータ時間領域法を用いて、注目領域内の環境パラメータを決定するシステムを提供する。従来技術は、単一偏波及び二重偏波の少なくともいずれかのレーダデータにおける、様々なパラメータを推定しうる、パラメータ時間領域法(PTDM:parametric time domain method)により提供していた。このような方法及び/またはシステムは、2007年7月30日に出願された、「パラメータ時間領域法を用いた地上反射波低減(Ground Clutter Mitigation Using a Parametric Time Domain Method)」と題された米国特許公開第11/830574号公報において示されており、当該公報の全記載は、引用により本明細書に組み込まれる。PTDMは、それぞれの偏波について、受信されたレーダデータにおける、反射波、降水、及びノイズの良好なモデルを提供する。しかしながら、PTDMは、偏波されたデータ間における相関性を考慮していない。発明のいくつかの実施形態では、2つの偏波チャネル間の相関性を調査するためにモデル及び推定量を提供する。
【0009】
図2は、単一偏波状態を有する従来のレーダシステム210と、二重偏波レーダシステム220(あるいは偏波レーダシステム)との比較する図を示している。二重偏波レーダシステム220は、しばしば図においては垂直偏波及び水平偏波として示される、2つの直交する偏波状態を送信及び受信することができる。二重偏波レーダシステムは、反射率の差、同極の相関係数、線形減極比、及び特定の位相差の少なくともいずれかを含む、気象学の多くの重要なパラメータを提供しうる。
【0010】
図3Aは、いくつかの実施形態に係る二重偏波レーダシステムの送信機側の簡略的なブロック図300を示している。このような送信機は、パルス対パルス基準において、あらゆる2つの直交する偏波状態間の偏波状態を切り替えることができる。送信機305は、導波路スイッチングデバイス310に、信号及び波形信号の少なくともいずれかを、提供及び/または送信することができる。波スイッチングデバイス310は、高出力導波路スイッチである。波スイッチングデバイス310は、波形信号の所望の偏波に基づいて、送信機305からデュープレクサ(duplexer)320への送信を切り替えうる。波スイッチングデバイス310は例えば、機械式モータ駆動回転翼スイッチ、及び電気制御フェライトサーキュレータスイッチの少なくともいずれかを含みうる。
【0011】
デュープレクサ320は、送信波形信号から受信した信号を分離しうる。なお、受信した信号は適切な偏波受信機に送信されうる。マイクロ波偏波ネットワーク325は、アンテナ330への適切な入力波形信号を合成するために用いられうる、可変比率出力分配器及び可変位相シフトの少なくともいずれかを含みうる。
【0012】
図3Bは、いくつかの実施形態に係る二重偏波レーダシステムの受信機側の簡略化されたブロック図360を示している。このような受信機は、データ共分散行列(共分散行列については後述する)の一部である、様々な項(実数及び虚数の両方)を計測しうる。マイクロ波偏波ネットワーク325は、アンテナ330からの後方散乱レーダ信号を受信し、受信した信号は、デュープレクサ320により、送信信号から二重化される。低ノイズ増幅器335は、信号フィルタのために使用されうる。それぞれの偏波チャネルのミキサ340は、固定局部発振器(STALO:stable local oscillator)を用いて受信した信号を合成するために使用されうる。中間周波数は、中間周波数増幅器345を用いて増幅され、後方散乱信号は、検出器350において両方の偏波について検出されうる。
【0013】
図4は発明の様々な実施形態を用いて、環境パラメータの計算をする二重偏波レーダシステムに接続されたコンピュータシステム400のブロック図を示している。コンピュータシステム400は、図2及び/または図3に示されるいかなる、あるいはすべての計算を実行するために用いられうる。図は、個々のシステム要素が、分離されて、あるいはより統合された方式でどのように実装されうるかを示している。コンピュータ400は、バス426を介して電気的に接続されたハードウェア要素を備えて示されている。ネットワークインタフェース452は、例えばインターネットのようなネットワークを通じて、計算デバイス400と他のコンピュータとを通信接続しうる。ハードウェア要素は、プロセッサ402、入力デバイス404、出力デバイス406、記憶デバイス408、コンピュータ読み取り可能記録媒体リーダ410a、通信システム414、DSPや専用プロセッサのような処理加速器416、及びメモリ418を含みうる。コンピュータ読み取り可能記録媒体410aは、さらにコンピュータ読み取り可能記録媒体410bが接続され、当該接続は、コンピュータ読み取り可能情報を含む、リモート、ローカル、固定、及び着脱可能な記憶デバイスの少なくともいずれかに加えて、一時記憶及び/または恒久記憶記録メディアを統合的に表す。
【0014】
二重偏波レーダシステムインタフェース450は、バス426に接続される。いくつかの実施形態において、二重偏波レーダシステムインタフェース450は、いかなる形式の通信インタフェースであってよい。たとえば、二重偏波レーダシステムインタフェース450は、USBインタフェース、UARTインタフェース、シリアルインタフェース、パラレルインタフェース他、であってよい。二重偏波レーダシステムインタフェース450は、二重偏波レーダシステムに直接接続されるように構成されうる。
【0015】
コンピュータシステム400は、ワーキングメモリ420内に現在は設けられているものとして示される、オペレーティングシステム、及び本明細書に記載された方法及び処理の少なくともいずれかを実装するために設計されたプログラムのようなその他のコードを含む、ソフトウェア要素も備える。いくつかの実施形態では、その他のコード442は、二重偏波レーダシステムからのユーザ入力を受信、及び本明細書に記載される様々な実施形態に係るデータを操作するための指示を提供するソフトウェアを含みうる。いくつかの実施形態において、その他のコード422は、天候事象を予測あるいは予報するソフトウェアを含む、及び/またはリアルタイムの気象予報及び警告の少なくともいずれかを提供しうる。相当な変化が特定の供給に応じて用いられうることは、同一の技術分野に属する当業者には容易に理解されるであろう。例えば、カスタマイズされたハードウェアが用いられてもよい、及び/または特定の要素は、ハードウェア、ソフトウェア(アプレットのような携帯ソフトウェアを含む)、あるいはその両方に実装されてもよい。さらに、ネットワーク入出力デバイスのような、他の計算デバイスへの接続が使用されうる。
【0016】
図3A、3B、及び図4は、特定のブロックを参照して本明細書で説明されるが、ブロックが記載の便宜上定義され、構成部品の特定の物理的装置を暗示するものではないことは理解されるべきである。さらに、ブロックは物理的に異なる構成に相当する必要はない。
【0017】
発明の方法の概要は、図5のフローチャート500を用いて提供される。方法500は、ブロック504において示されるように、二重偏波レーダ信号を注目領域に伝搬することにより開始する。サンプリングされた時系列データは、ブロック508で2つの偏波について収集され、注目領域の時間領域パラメータモデルのための二重偏波パラメータを決定する処理に用いられる。特定のモデルが以下に説明されるが、発明の代替的な実施形態では、他の二重偏波パラメータモデルを用いてもよい。
【0018】
ブロック512で、同極の時系列データのスペクトルモーメントが推定されうる。例えば、スペクトルモーメントは、本技術分野で知られているPTDM及び/またはGMAP法を用いることにより推定されうる。いくつかの実施形態では、同極データの対数尤度関数の総和は、スペクトルモーメントのために最小化され、解かれうる。他の実施形態では、同極データの対数尤度関数の総和は、スペクトルモーメントのために最大化され、解かれうる。いくつかの実施形態において、反射率の差も、2つの偏波のスペクトルモーメントから推定されうる。ブロック516で、α及びβ=jαは前回の距離ゲート(range gate)から推定された二重偏波パラメータを用いて決定されうる。ブロック520で、例えばVα=Vh+αVvの2つの偏波ベクトルの線形結合の対数尤度関数は、最小化されうる。他の実施形態において、対数尤度関数は最大化されうる。この最小化(あるいは最大化)から、同極の相関係数の大きさ及び/または位相は、ブロック532で決定されうる。
【0019】
発明のいくつかの実施形態では、2つの偏波レーダデータの線形結合から、同極の相関係数の大きさ及び位相を推定しうる。このような推定はたとえば、コンピュータシステム400を用いて実行されうる。図6は、複素平面において、ρcoの偏角である、同極の相関係数(ρco)の大きさ、及び伝播位相差(Φdp)を決定するために生じうる、このような処理600のフローチャートを示している。処理600は、ブロック605で開始し、ブロック610で、2つの偏波について、注目領域の後方散乱からの電圧読み出し(voltage readings)を受信しうる。例えば、電圧読み出しは垂直偏波及び水平偏波された信号からのデータを含みうる。
【0020】
ブロック615において、VH及びVVの両方についての尤度関数の総和は、水平及び垂直スペクトルモーメントを得るために最小化される。それぞれの偏波(h,v)についての尤度関数は、
(5)
で示される。ここで、Rh,vはサンプリングレートTsにおける計測データの共分散行列であり、
(6)
で与えられ、そして
はH信号についてサンプリングされた共分散行列であり、
はV信号についてサンプリングされた共分散行列である。スペクトルモーメントは、
(7)
であり、ここで
は降水信号出力、
は降水スペクトル幅、
は降水の平均速度、
は反射波出力、
は反射波スペクトル幅、
はノイズ出力、及びλはレーダ波長を示し、jは
であり、δはクロネッカー関数である。
【0021】
2つの偏波についての降水スペクトルモーメントは、対数尤度関数を最小化することにより得られる。
(8)
スペクトルモーメントがブロック620で決定されると、
は
(9)
から決定されうる。
【0022】
カウンタnは、ブロック625で最初の距離ビン(range bin)の開始で、1に初期化される。ブロック627で、nがいくつかの予め定められた、及び/またはユーザにより定義された定数C未満であるかどうかを判定されうる。いくつかの実施形態において、Cは2、3、4、5、6、7、8、9、10他、となりうる。nがC未満である場合、α及びβは、ブロック630で、複素平面の偏角Φdpから決定されうる。最初の距離ビン(C未満のビン数)のα及びβの値は、図8において示されるように、+1あるいは−1となるように推定されうる。いくつかの実施形態において、最初のビンの偏角についての偏角Φdpは推定技術を用いて推定されうる。例えば、最初の少数のビンについては、0°<Φdp<90°の場合はα=−1及びβ=1である。90°<Φdp<180°の場合は、α=1及びβ=1である。180°<Φdp<270°の場合は、α=1及びβ=−1である。270°<Φdp<360°の場合は、α=−1及びβ=−1である。そして処理600はブロック635に進む。
【0023】
ブロック627において、nがCよりも大きかった場合、α及びα=jβは
(10)
を用いて推定されうる。数10において、
は前回の距離ビンについての同極の相関係数である。
【0024】
ブロック635で、2つの偏波ベクトルの線形結合は、
Vα=Vh+αVv (11)
として構築されうる。ここで、Vhは水平偏波信号についてサンプリングされた電圧データ、及びVvは垂直偏波信号についてサンプリングされた電圧データである。
【0025】
線形結合データVαについての対数尤度関数は、
(12)
で表される。ここで、Rcは反射波についての共分散行列、RNはノイズについての共分散行列、
は降水についての水平偏波共分散行列、
は降水についての垂直偏波共分散行列、及び
はVαについてサンプリングされた共分散行列である。
【0026】
いくつかの実施形態において、Lαはxを0に近づけることに関して、尤度関数の微分係数を設定することにより最小化されうる。
(13)
ここで、
(14)
である。結果として得られた最小化された尤度関数Lαは、同極の相関係数の実数及び虚数部の値を生成しうる。
【0027】
ブロック645で、αが実数である場合、次の式からρcoの実数部を決定することができる。
(15)
そして、αが虚数、α=jβ(βは実数)である場合、次の式からρcoの虚数部を決定することができる。
(16)
【0028】
ブロック630、620、及び640で決定されたような、α、βの値、Zdrの推定値、推定されたxを用いることにより、ブロック645で、ρcoの実数及び虚数部を得るための式15及び式16を解く。ブロック650で、ρcoの大きさ及び偏角(Φdp)は、n番目の距離ビンについての、ρcoの実数及び絶対値から決定されうる。
【0029】
ブロック655で、nがデータセットにおける距離ゲートの数Nに等しい場合、処理600はブロック660で終了する。しかしながら、nは距離ゲートの数未満である場合、nはブロック665で増加させられ、処理600はブロック627に戻る。
【0030】
図7は、いくつかの実施形態に係る、α及びβの最適値を推定する方法700を示している。ブロック710で、処理700はビン数nが予め定められた値x未満、例えば10未満であるか否かを判定する。いくつかの実施形態において、xは1、2、3、4、5、6、7、8、9他、に等しい。nがx未満である場合、最初の少数のビンのデータを参照し、ブロック720で複素平面においてΦdpの位置からρcoを推定しうる。0°<Φdp<90°である場合、ブロック730に示されるようにα=−1及びβ=1となる。90°<Φdp<180°である場合、ブロック740に示されるようにα=1及びβ=1となる。180°<Φdp<270°である場合、ブロック750に示されるようにα=1及びβ=−1となる。270°<Φdp<360°である場合、ブロック760に示されるようにα=−1及びβ=−1となる。ビン数nが予め定められた値xより大きい場合、α及びβの最適値はブロック770及び780に示されるように決定されうる。
【0031】
図9A乃至9Cは、パルス対処理(9A)、スペクトルフィルタ(9B)、及び本明細書に記載されるような二重偏波パラメータ時間領域法(9C)を用いた場合の、注目領域における反射率の比較を示している。図9Cに見られるように、地上反射波及びノイズの少なくともいずれかは、かなり低減されている。
【0032】
図9D乃至9Fは、パルス対処理(9D)、スペクトルフィルタ(9E)、及び本明細書に記載されるような二重偏波パラメータ時間領域法(9F)を用いた場合の、注目領域における速度計測結果の比較を示している。図9Fに見られるように、地上反射波及びノイズの少なくともいずれかは、かなり低減されている。さらに、図9Fは竜巻及び/またはハリケーンの巡回シグニチャ指標(circular signature indicative)の特性を示している。この巡回シグニチャは、図9D及び9Eに可視化したものとは異なる(あるいは起こり得ない)。
【0033】
図10A乃至10Cは、パルス対処理(10A)、スペクトルフィルタ(10B)、及び本明細書に記載されるような二重偏波パラメータ時間領域法(10C)を用いた場合の、注目領域における同極の相関係数(ρco)の計測結果の比較を示している。図10Cに見られるように、発明の実施形態を用いることにより、地上反射波及びノイズの少なくともいずれかは、かなり低減されている。
【0034】
図10D乃至10Fは、パルス対処理(10D)、スペクトルフィルタ(10E)、及び本明細書に記載されるような二重偏波パラメータ時間領域法(10F)を用いた場合の、注目領域における伝播位相差(Φdp)の計測結果の比較を示している。また図10Fに見られるように、発明の実施形態を用いることにより、地上反射波及びノイズの少なくともいずれかは、かなり低減されている。
【0035】
図11A及び11Bは、275度及び315度の方位角において、本明細書に記載された実施形態、及びGMAP法の両方を用いて推定された|ρco|についてのレンジプロファイルを示している。信号が弱い、即ちSNRが小さい箇所においてGMAPの|ρco|は低いことが示されている。さらに、反射率及び相関係数の両方の閾値化を用いることにより、GMAPでは気象エコーと反射波との間で、良好な分類が提供されていない。反射波があらわれる領域において、GMAPの|ρco|の標準偏差は非常に高い。反射波の漏損スペクトル点となりうることにより説明される。本明細書に記載のいくつかの実施形態は、時間領域において動作するため、これらの実施形態はこの漏損の問題による影響を受けない。さらに、本明細書に記載の実施形態は、GMAPよりも良好なノイズレベルを推定することができる。ノイズが信号から適切に除去されない場合、より正確に推定された|ρco|を提供することができる。
【0036】
図12A及び12Bは、本明細書に記載の実施形態を用いて16個のサンプリングデータのみにより推定されたρco及びΦdpにおける誤差を示している。図に示されるとおり、このような推定誤差は許容可能である。
【0037】
回路、論理モジュール、ブロック、プロセッサ、及び他の要素の少なくともいずれかは、様々な動作を実行するために構成されているものとしてここでは記載された。同一の技術分野に属する当業者は、構成が設計、設置、相互接続、及び/または特定の要素のプログラムの実装により、また構成された要素が異なる動作を再構成可能であってもなくてもよいように実装されることにより達成され得ることを理解するだろう。例えば、プログラム可能なプロセッサは、適切な実行可能なコードを提供することにより構成され得る、専用の論理回路は論理ゲート及び他の回路素子に適切に接続することにより構成され得る、など。
【0038】
上述した実施形態は、特定のハードウェア及びソフトウェア要素を参照したが、同一の技術分野に属する当業者は、ハードウェア及びソフトウェア要素の少なくともいずれかの異なる組み合わせが用いられてもよいし、ハードウェアに実装されるものとして記載された特定の動作はソフトウェアまたはその他の手段に実装されてもよいことは、理解するだろう。
【0039】
本発明の様々な特徴を組み入れたコンピュータプログラムは、様々なコンピュータ読み取り可能な記録媒体に符号化されてもよい。適切な媒体は、磁気ディスクあるいはテープ、CDやDVDのような光学記録媒体、フラッシュメモリ等である。プログラムコードが符号化されたコンピュータ読み取り可能な記録媒体は、互換デバイスにパッケージされてもよいし、他のデバイスに分割されて提供されてもよい。さらにプログラムコードは符号化され、インターネットを含む様々なプロトコルに適合する有線及び/または無線ネットワークを介して送信されてもよく、これにより例えばインターネットダウンロード等の手段で配布してもよい。
【特許請求の範囲】
【請求項1】
二重偏波レーダの送信機を用いて、注目領域に偏波レーダ信号を伝播する工程と、
前記注目領域内で散乱されてサンプリングされた同極の時系列レーダデータを、前記二重偏波レーダを用いて収集する工程であって、前記同極の時系列レーダデータが垂直偏波データ及び水平偏波データを有する工程と、
前記垂直偏波データ及び水平偏波データの複素線形結合から、前記水平偏波データ及び垂直偏波データ間の、反射率の差及び同極の相関係数の少なくとも1つを決定する工程と、
を備えることを特徴とする方法。
【請求項2】
前記水平偏波データ及び前記垂直偏波データの線形結合は、
Vα=VH+αVV
として表せることを特徴とする請求項1に記載の方法。
【請求項3】
n番目の距離ゲートの測定結果についてαの最適値は、
として推定されることを特徴とする請求項2に記載の方法。
【請求項4】
n番目の距離ゲートの測定結果についてα=jβの最適値は、
として推定されることを特徴とする請求項2に記載の方法。
【請求項5】
レーダを用いて注目領域を調査する方法であって、
二重偏波レーダシステムを用いて、前記注目領域に偏波レーダ信号を伝播する工程と、
前記注目領域内で散乱された、2つの偏波についての時系列レーダデータを収集する工程と、
定義されたパラメータセットについて、前記注目領域のパラメトリックモデル内の二重偏波時系列データのそれぞれについて、尤度関数を計算する工程と、
総和された前記尤度関数の極値を検出するために、パラメータセットを変える工程と、
を備えることを特徴とする方法。
【請求項6】
それぞれの偏波について前記尤度関数は、
であり、Rh,vは要素を有する水平及び垂直偏波のモデル共分散行列
k,l=1,...,N
であり、
Tsはサンプリング期間、
λはレーダ信号の波長、
jは
、及び
σはクロネッカー関数であり、
前記パラメータセットは
降水信号の強度である
、
降水スペクトル幅である
、
降水量の平均速度である
、
反射強度である
、
反射スペクトル幅である
、及び
ノイズ強度である
を備えることを特徴とする請求項5に記載の方法。
【請求項7】
前記極値は、大域的な極値であることを特徴とする請求項5に記載の方法。
【請求項8】
前記極値は、最小値であることを特徴とする請求項5に記載の方法
【請求項9】
Vα=VH+αVVを設定する工程と、
Vαについて、対数尤度関数を最小化する工程と、をさらに備え、
前記対数尤度関数は、
であり、
はVαのサンプル共分散行列であることを特徴とする請求項5に記載の方法。
【請求項10】
αが実数の場合、
であることを特徴とする請求項9に記載の方法。
【請求項11】
n番目の距離ゲートについてαの最適値は、
により決定されることを特徴とする請求項10に記載の方法。
【請求項12】
α=jβの場合、
であることを特徴とする請求項9に記載の方法。
【請求項13】
n番目の距離ゲートについてβの最適値は、
により決定されることを特徴とする請求項12に記載の方法。
【請求項14】
レーダを用いて注目領域を調査する方法であって、
二重偏波レーダシステムを用いて、前記注目領域に偏波レーダ信号を伝播する工程と、
前記注目領域内で散乱された、第1の偏波を有する第1の時系列レーダデータを、レーダを用いて収集する工程と、
前記注目領域で散乱された、第2の偏波を有する第2の時系列レーダデータを、レーダを用いて収集する工程であって、前記第1の偏波及び前記第2の偏波が実質的に直交している工程と、
前記2つの偏波のスペクトルモーメントを推定する工程と、
前記第1の時系列レーダデータ及び前記第2の時系列レーダデータの線形結合を用いて、反射率の差、同極の相関係数の大きさ、及び当該同極の相関係数の位相の少なくともいずれかを推定する工程と、
を備えることを特徴とする方法。
【請求項15】
前記同極の相関係数の大きさ、及び当該同極の相関係数の位相の少なくともいずれかは、前記第1の時系列レーダデータ及び前記第2の時系列レーダデータを用いて推定されることを特徴とする請求項14に記載の方法。
【請求項16】
前記第1の時系列レーダデータの尤度関数、及び前記第2の時系列レーダデータの尤度関数を加算することにより、総和された尤度関数を生成する手段と、
前記第1の時系列レーダデータ及び前記第2の時系列レーダデータの前記スペクトルモーメントを推定するために、前記総和された尤度関数を最大化する手段と、
をさらに備えることを特徴とする請求項14に記載の方法。
【請求項17】
前記第1の時系列レーダデータ及び前記第2の時系列レーダデータの線形結合は、
Vα=VH+αVVと、
(α=jβ)と、
を備えることを特徴とする請求項14に記載の方法。
【請求項18】
前記同極の相関係数の大きさ及び位相を推定する工程は、前記第1の時系列レーダデータ及び前記第2の時系列レーダデータの線形結合の負対数尤度関数を最小化する工程を含み得ることを特徴とする請求項14に記載の方法。
【請求項19】
互いに実質的に直交する偏波信号を送信する二重偏波送信機と、
第1の偏波方向において第1の信号、及び第2の偏波方向において第2の信号を受信する二重偏波受信機であって、前記第1の偏波及び前記第2の偏波が実質的に直交している二重偏波受信機と、
少なくとも前記二重偏波受信機に連結されたコンピュータシステムであって、前記第1の信号及び前記第2の信号の線形結合を用いて、反射率の差、同極の相関係数の大きさ、及び当該同極の相関係数の位相の少なくともいずれかを推定するコンピュータシステムと、
を備えることを特徴とするレーダシステム。
【請求項20】
注目領域にレーダ信号を伝送する伝送手段と、
前記注目領域から、第1の偏波状態における後方散乱レーダ信号、及び第2の偏波状態における後方散乱レーダ信号を受信する受信手段と、
前記第1の偏波状態における後方散乱レーダ信号、及び前記第2の偏波状態における後方散乱レーダ信号のスペクトルモーメントを推定し、前記第1の偏波状態における後方散乱レーダ信号、及び前記第2の偏波状態における後方散乱レーダ信号の線形結合を用いて、反射率の差、同極の相関係数の大きさ、及び当該同極の相関係数の位相の少なくともいずれかを推定する計算手段と、
を備えることを特徴とするレーダシステム。
【請求項1】
二重偏波レーダの送信機を用いて、注目領域に偏波レーダ信号を伝播する工程と、
前記注目領域内で散乱されてサンプリングされた同極の時系列レーダデータを、前記二重偏波レーダを用いて収集する工程であって、前記同極の時系列レーダデータが垂直偏波データ及び水平偏波データを有する工程と、
前記垂直偏波データ及び水平偏波データの複素線形結合から、前記水平偏波データ及び垂直偏波データ間の、反射率の差及び同極の相関係数の少なくとも1つを決定する工程と、
を備えることを特徴とする方法。
【請求項2】
前記水平偏波データ及び前記垂直偏波データの線形結合は、
Vα=VH+αVV
として表せることを特徴とする請求項1に記載の方法。
【請求項3】
n番目の距離ゲートの測定結果についてαの最適値は、
として推定されることを特徴とする請求項2に記載の方法。
【請求項4】
n番目の距離ゲートの測定結果についてα=jβの最適値は、
として推定されることを特徴とする請求項2に記載の方法。
【請求項5】
レーダを用いて注目領域を調査する方法であって、
二重偏波レーダシステムを用いて、前記注目領域に偏波レーダ信号を伝播する工程と、
前記注目領域内で散乱された、2つの偏波についての時系列レーダデータを収集する工程と、
定義されたパラメータセットについて、前記注目領域のパラメトリックモデル内の二重偏波時系列データのそれぞれについて、尤度関数を計算する工程と、
総和された前記尤度関数の極値を検出するために、パラメータセットを変える工程と、
を備えることを特徴とする方法。
【請求項6】
それぞれの偏波について前記尤度関数は、
であり、Rh,vは要素を有する水平及び垂直偏波のモデル共分散行列
k,l=1,...,N
であり、
Tsはサンプリング期間、
λはレーダ信号の波長、
jは
、及び
σはクロネッカー関数であり、
前記パラメータセットは
降水信号の強度である
、
降水スペクトル幅である
、
降水量の平均速度である
、
反射強度である
、
反射スペクトル幅である
、及び
ノイズ強度である
を備えることを特徴とする請求項5に記載の方法。
【請求項7】
前記極値は、大域的な極値であることを特徴とする請求項5に記載の方法。
【請求項8】
前記極値は、最小値であることを特徴とする請求項5に記載の方法
【請求項9】
Vα=VH+αVVを設定する工程と、
Vαについて、対数尤度関数を最小化する工程と、をさらに備え、
前記対数尤度関数は、
であり、
はVαのサンプル共分散行列であることを特徴とする請求項5に記載の方法。
【請求項10】
αが実数の場合、
であることを特徴とする請求項9に記載の方法。
【請求項11】
n番目の距離ゲートについてαの最適値は、
により決定されることを特徴とする請求項10に記載の方法。
【請求項12】
α=jβの場合、
であることを特徴とする請求項9に記載の方法。
【請求項13】
n番目の距離ゲートについてβの最適値は、
により決定されることを特徴とする請求項12に記載の方法。
【請求項14】
レーダを用いて注目領域を調査する方法であって、
二重偏波レーダシステムを用いて、前記注目領域に偏波レーダ信号を伝播する工程と、
前記注目領域内で散乱された、第1の偏波を有する第1の時系列レーダデータを、レーダを用いて収集する工程と、
前記注目領域で散乱された、第2の偏波を有する第2の時系列レーダデータを、レーダを用いて収集する工程であって、前記第1の偏波及び前記第2の偏波が実質的に直交している工程と、
前記2つの偏波のスペクトルモーメントを推定する工程と、
前記第1の時系列レーダデータ及び前記第2の時系列レーダデータの線形結合を用いて、反射率の差、同極の相関係数の大きさ、及び当該同極の相関係数の位相の少なくともいずれかを推定する工程と、
を備えることを特徴とする方法。
【請求項15】
前記同極の相関係数の大きさ、及び当該同極の相関係数の位相の少なくともいずれかは、前記第1の時系列レーダデータ及び前記第2の時系列レーダデータを用いて推定されることを特徴とする請求項14に記載の方法。
【請求項16】
前記第1の時系列レーダデータの尤度関数、及び前記第2の時系列レーダデータの尤度関数を加算することにより、総和された尤度関数を生成する手段と、
前記第1の時系列レーダデータ及び前記第2の時系列レーダデータの前記スペクトルモーメントを推定するために、前記総和された尤度関数を最大化する手段と、
をさらに備えることを特徴とする請求項14に記載の方法。
【請求項17】
前記第1の時系列レーダデータ及び前記第2の時系列レーダデータの線形結合は、
Vα=VH+αVVと、
(α=jβ)と、
を備えることを特徴とする請求項14に記載の方法。
【請求項18】
前記同極の相関係数の大きさ及び位相を推定する工程は、前記第1の時系列レーダデータ及び前記第2の時系列レーダデータの線形結合の負対数尤度関数を最小化する工程を含み得ることを特徴とする請求項14に記載の方法。
【請求項19】
互いに実質的に直交する偏波信号を送信する二重偏波送信機と、
第1の偏波方向において第1の信号、及び第2の偏波方向において第2の信号を受信する二重偏波受信機であって、前記第1の偏波及び前記第2の偏波が実質的に直交している二重偏波受信機と、
少なくとも前記二重偏波受信機に連結されたコンピュータシステムであって、前記第1の信号及び前記第2の信号の線形結合を用いて、反射率の差、同極の相関係数の大きさ、及び当該同極の相関係数の位相の少なくともいずれかを推定するコンピュータシステムと、
を備えることを特徴とするレーダシステム。
【請求項20】
注目領域にレーダ信号を伝送する伝送手段と、
前記注目領域から、第1の偏波状態における後方散乱レーダ信号、及び第2の偏波状態における後方散乱レーダ信号を受信する受信手段と、
前記第1の偏波状態における後方散乱レーダ信号、及び前記第2の偏波状態における後方散乱レーダ信号のスペクトルモーメントを推定し、前記第1の偏波状態における後方散乱レーダ信号、及び前記第2の偏波状態における後方散乱レーダ信号の線形結合を用いて、反射率の差、同極の相関係数の大きさ、及び当該同極の相関係数の位相の少なくともいずれかを推定する計算手段と、
を備えることを特徴とするレーダシステム。
【図1】

【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9A】
【図9B】
【図9C】
【図9D】
【図9E】
【図9F】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図11A】
【図11B】
【図12A】
【図12B】
【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9A】
【図9B】
【図9C】
【図9D】
【図9E】
【図9F】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図11A】
【図11B】
【図12A】
【図12B】
【公表番号】特表2011−520125(P2011−520125A)
【公表日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願番号】特願2011−508675(P2011−508675)
【出願日】平成21年5月7日(2009.5.7)
【国際出願番号】PCT/US2009/043180
【国際公開番号】WO2009/137702
【国際公開日】平成21年11月12日(2009.11.12)
【出願人】(592246587)コロラド ステート ユニバーシティー リサーチ ファウンデーション (17)
【Fターム(参考)】
【公表日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願日】平成21年5月7日(2009.5.7)
【国際出願番号】PCT/US2009/043180
【国際公開番号】WO2009/137702
【国際公開日】平成21年11月12日(2009.11.12)
【出願人】(592246587)コロラド ステート ユニバーシティー リサーチ ファウンデーション (17)
【Fターム(参考)】
[ Back to top ]