
暗視野欠陥検査方法、暗視野欠陥検査装置、収差解析方法及び収差解析装置
【課題】照明系と検出系、温度・気圧と言った環境をモニタリングする情報収集機能、モニタリング結果と設計値、理論計算値もしくはシミュレーション結果により導出した理想値を比較しモニタリング結果と理想値を近づけるように装置を較正するフィードバック機能を有する装置状態管理機能、を含むことで、装置状態及び装置感度を一定に保つ手段を提供する。
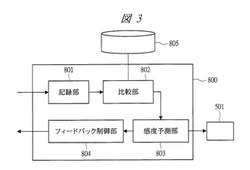
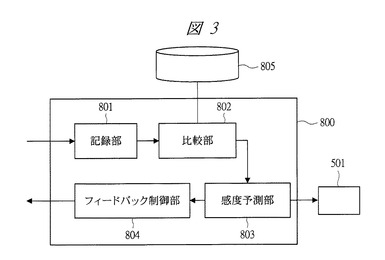
【解決手段】制御部800を記録部801、比較部802、感度予測部803、フィードバック制御部804、を含む構成とする。比較部802において、記録部801から送信されたモニタリング結果とデータベース805に格納された理想値を対比する。理想値とモニタリング結果との差分が所定の閾値を越えた場合には、フィードバック制御部804が照明系と検出系の補正を行う。
【解決手段】制御部800を記録部801、比較部802、感度予測部803、フィードバック制御部804、を含む構成とする。比較部802において、記録部801から送信されたモニタリング結果とデータベース805に格納された理想値を対比する。理想値とモニタリング結果との差分が所定の閾値を越えた場合には、フィードバック制御部804が照明系と検出系の補正を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体製造や磁気ヘッド製造ラインにて用いられる暗視野欠陥検査装置の装置状態モニタリング機能とモニタリング結果に基づいた装置状態の較正機能、特にモニタリング結果に基づいた装置状態の較正機能並びに異常状態の予測機能を備えた装置およびその予測方法に関する。
【背景技術】
【0002】
暗視野欠陥検査装置とは観察試料による散乱光を観察することにより、高コントラスト・超微細構造の観察を行い、欠陥検査を行うことを目的とした検査装置のことである。
【0003】
半導体製造装置では、EES(Equipment Engineering System)と呼ばれる装置の安定化、装置間の性能差低減、突発的故障の予知を目的とした取り組みが行われている。EESでは、プロセス中のあらゆるデータを大量に収集・保存し、処理することで、上記目的を達成することを目指している。
【0004】
半導体製造や磁気ヘッド製造ラインにおいては、検査対象物の微細化に伴い、検出すべき欠陥信号の微弱化が進んでいる。特に暗視野欠陥検査装置においては、欠陥検出のために散乱光を用いており、微弱光の安定検出に対する要求は強い。微弱光を安定検出するには、装置状態を高い水準で一定に保つことが求められる。
【0005】
特開2007−273513号公報(特許文献1)には、暗視検査装置に搭載されている空間フィルタの自動較正技術が開示されている。これは、被検ウェハ上の周期パターンからの回折光を瞳上で観察し、透過光量が最小となるように空間フィルタを自動的に設置するものである。
【0006】
また、特開2007−248086号公報(特許文献2)には、検査装置内の温度、気圧の変化による結像レンズの結像位置変化を補正する機構を備えた装置について記述がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−273513号公報
【特許文献2】特開2007−248086号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、上記各文献の半導体検査装置においても装置全体の管理ではなく、一部の機能を管理し補正するにとどまっている。製造ラインには複数台の検査装置が配置されることが多く、装置間の検出感度を一致させることも重要な課題となっている。さらに、製造ラインの安定運用のため、検査装置の故障予知も求められる。
【0009】
本発明の目的は、照明光学系と検出光学系、温度・気圧と言った環境をモニタリングする情報収集機能、モニタリング結果と設計値、理論計算値もしくはシミュレーション結果により導出した理想値を比較しモニタリング結果と理想値を近づけるように装置を較正するフィードバック機能を有する装置状態管理機能、を含むことで、装置状態及び装置感度を一定に保つ手段を提供することにある。
【0010】
本発明の前記並びにその他の目的と新規な特徴は、本明細書の記述及び添付図面から明らかになるであろう。
【課題を解決するための手段】
【0011】
本願において開示される発明のうち、代表的なものの概要を簡単に説明すれば、次の通りである。
【0012】
本発明の代表的な実施の形態に関わる暗視野欠陥検査方法は、被検査物の表面を照明する照明光により被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、この第1のセンサが取得した信号に基づき被検査物上の異物や欠陥を検出するものであって、照明光の強度分布と偏光状態分布いずれか又は双方を計測する照明光モニタリングステップと、検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び被検査物を載置するステージ動作状態を検出する検出系モニタリングステップと、これらの照明光モニタリングステップと検出系モニタリングステップの検出結果と理想値とを比較し、それぞれの検出結果と理想値との差分が許容値以下となるよう照明光と検出系のいずれか又は双方を調整するフィードバック制御ステップと、を含むことを特徴とする。
【0013】
この暗視野欠陥検査方法において、照明光モニタリングステップは正反射光を利用して照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴としても良い。
【0014】
この暗視野欠陥検査方法において、照明光モニタリングステップは被検査物の検査面となるステージ上で照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴としても良い。
【0015】
この暗視野欠陥検査方法において、さきの照明光はレーザを光源とした照明系によって生成され、照明光モニタリングステップにて照明光生成過程の光線の計測結果から検査面上での照明光の強度分布と偏光状態分布のいずれか又は双方を推定することを特徴としても良い。
【0016】
この暗視野欠陥検査方法において、検出系モニタリングステップは被検査物の検査面となるステージ上に置かれた特性が既知の反射型光学素子にスポット光を斜方照明し得られた散乱光を第2のセンサにより検出することを特徴としても良い。
【0017】
この暗視野欠陥検査方法において、照明光モニタリングステップ及び検出系モニタリングステップの検出結果の経時変化を記録し、統計処理により装置の異常を判断する装置異常確認ステップを更に含むことを特徴としても良い。
【0018】
この暗視野欠陥検査方法において、更に、照明光モニタリングステップ及び検出系モニタリングステップの検出結果と理想値を同時に表示する検出結果出力ステップと、を含むことを特徴としても良い。
【0019】
本発明の代表的な実施の形態に関わる別の暗視野欠陥検査方法は、被検査物の表面を照明する照明光により被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、第1のセンサが取得した信号に基づき被検査物上の異物や欠陥を検出するものであって、照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリングステップと、検出系に入力された散乱光を第2のセンサにより検出する検出系モニタリングステップと、照明光モニタリングステップ及び検出系モニタリングステップ実行時の温度及び気圧の双方またはいずれか一方を測定する環境測定ステップと、照明光モニタリングステップ、検出系モニタリングステップ及び環境測定ステップの検出結果と理想値とを比較し、それぞれの検出結果と理想値との差分が許容値以下となるよう照明光と検出系のいずれか又は双方を調整するフィードバック制御ステップと、を含むことを特徴とする。
【0020】
この暗視野欠陥検査方法において、更に、照明光モニタリングステップ及び検出系モニタリングステップの検出結果と理想値を表示する検出結果出力ステップと、を含むことを特徴としても良い。
【0021】
本発明の代表的な実施の形態に関わる暗視野欠陥検査装置は、照明光を出力する照明系と、被検査物に照射された照明光の散乱光を検出する検出系と、制御部と、を有し、被検査物の表面を照明する照明光により被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、取得した信号に基づき被検査物上の異物や欠陥を検出するものであって、照明系は照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段を有し、検出系は検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び被検査物を載置するステージ動作状態を検出する検出系モニタリング手段を有し、制御部は照明光モニタリング手段と検出系モニタリング手段の検出結果と理想値とを比較し、それぞれの検出結果と理想値との差分が許容値以下となるよう照明光と検出系のいずれか又は双方を調整することを特徴とする。
【0022】
この暗視野欠陥検査装置において、照明光モニタリング手段は正反射光を利用して照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴としても良い。
【0023】
この暗視野欠陥検査装置において、照明光モニタリング手段は被検査物の検査面となるステージ上で照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴としても良い。
【0024】
この暗視野欠陥検査装置において、照明光は照明系内部のレーザを光源とし、照明光モニタリング手段は照明光生成過程の光線の計測結果から検査面上での照明光の強度分布と偏光状態分布のいずれか又は双方を推定することを特徴としても良い。
【0025】
この暗視野欠陥検査装置において、検出系モニタリング手段は被検査物の検査面となるステージ上に置かれた特性が既知の反射型光学素子にスポット光を斜方照明し得られた散乱光を第2のセンサにより検出することを特徴としても良い。
【0026】
この暗視野欠陥検査装置において、検出系モニタリング手段は被検査物の検査面となるステージ上に置かれた点光源と特性が既知の透過型光学素子を用いることで得られる所定の光を第2のセンサにより検出することを特徴としても良い。
【0027】
この暗視野欠陥検査装置において、照明光モニタリング手段及び検出系モニタリング手段の検出結果の経時変化を記録し、統計処理により装置の異常を判断する装置異常確認手段を更に含むことを特徴としても良い。
【0028】
この暗視野欠陥検査装置において、更に、照明光モニタリング手段及び検出系モニタリング手段の検出結果と理想値を同時に表示する検出結果出力手段と、を含むことを特徴としても良い。
【0029】
本発明の代表的な実施の形態に関わる別の暗視野欠陥検査装置は、照明光を出力する照明系と、被検査物に照射された照明光の散乱光を検出する検出系と、制御部と、を有し、被検査物の表面を照明する照明光により被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、取得した信号に基づき被検査物上の異物や欠陥を検出するものであって、照明系は照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段を有し、検出系は検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び被検査物を載置するステージ動作状態を検出する検出系モニタリング手段を有し、制御部は照明光モニタリング手段と検出系モニタリング手段の検出結果と理想値とを比較する比較部と、照明光モニタリング手段及び検出系モニタリング手段実行時の温度及び気圧の双方またはいずれか一方を測定する環境測定手段と、照明光モニタリング手段、検出系モニタリング手段及び環境測定手段の検出結果と予め算出しておいた理想値とを比較し、それぞれの検出結果と理想値との差分が許容値以下となるよう照明光と検出系のいずれか又は双方を調整するフィードバック手段と、を有することを特徴とする。
【0030】
この暗視野欠陥検査装置において、更に、照明光モニタリング手段、検出系モニタリング手段及び環境測定手段の検出結果とそれぞれの理想値を表示する検出結果出力手段と、を含むことを特徴としても良い。
【発明の効果】
【0031】
本願において開示される発明のうち、代表的なものによって得られる効果を簡単に説明すれば以下の通りである。
【0032】
本発明の代表的な実施の形態に関わる暗視野欠陥検査装置の較正方法により、暗視野欠陥検査装置の装置性能が安定化する。また、装置間にて同一の調整仕様を用いることで装置間感度差が低減される。また、装置故障の予兆を検知することで、装置稼働率が向上する。
【図面の簡単な説明】
【0033】
【図1】一般的な暗視野欠陥検査装置の構成を表す図である。
【図2】本発明の第1の実施の形態に関わる暗視野欠陥検査装置の構成を表す図である。
【図3】本発明の第1の実施の形態に関わる制御部の内部構成を示すブロック図である。
【図4】本発明の第1の実施の形態に関わる暗視野欠陥検査装置におけるモニタリング処理手順を表すフローチャートである。
【図5】照明系モニタリング部によるモニタリング処理の概念を表す概念図である。
【図6】照明系と検出系のモニタリングに使用するモニタリング用チップを表す図である。
【図7】装置較正手順の一例を示す概念図である。
【図8】閾値による装置パラメータの較正処理に関するグラフである。
【図9】本発明の第1の実施の形態に関わる複数台の暗視野欠陥検査装置の性能均一化の処理手順を表すフローチャートである。
【図10】暗視野欠陥検査装置の予測感度μの挙動により、どのような障害が考えられるかを表す概念図である。
【図11】本発明の第1の実施の形態での警告を伝える画面である。
【図12】本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の構成を表す図である。
【図13】点光源発生部の構成を表す図である。
【図14】本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の構成を表す図である。
【図15】本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の照明系モニタリングの構成を表す図である。
【図16】本発明の第2の実施の形態に関わる制御部の内部構成を示すブロック図である。
【図17】本発明の第2の実施の形態に関わる制御部によるモニタリング及び較正の処理手順を表すフローチャートである。
【図18】本発明の第3の実施の形態に関わる制御部の内部構成を示すブロック図である。
【図19】本発明の第3の実施の形態に関わる制御部によるモニタリングの処理手順を表すフローチャートである。
【図20】装置較正の処理手順を表すフローチャートである。
【図21】本発明の第4の実施の形態に関わる制御部の内部構成を示すブロック図である。
【図22】本発明の第4の実施の形態に関わる暗視野欠陥検査装置におけるモニタリング処理手順を表すフローチャートである。
【図23】本発明の第5の実施の形態に関わる制御部800−5の内部構成を表すブロック図である。
【図24】本発明の第5の実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。
【図25】本発明の第6の実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。
【図26】本発明の第7の実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。
【発明を実施するための形態】
【0034】
(従来の実施の形態)
図1は一般的な暗視野欠陥検査装置の構成を表す図である。暗視野欠陥検査装置の事項について、この図を用いて説明する。
【0035】
一般的な暗視野欠陥検査装置は、対物レンズ20、空間フィルタ21、結像レンズ22、センサ23、レーザ101、エキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105A、105B、レンズ106、XYステージ300、Zステージ400、被検査物高さ計測部401、信号処理部500、モニタ501を含んで構成される。
【0036】
対物レンズ20は照明光100の照射により被検査物上の異物、欠陥、パターンから散乱、回折された光を、被検査物1の法線方向に垂直な方向(上方)から集光する対物レンズである。
【0037】
被検査物1は、この暗視野欠陥検査装置により検査される半導体装置などである。被検査物1はXYステージ300上に載置される。
【0038】
対物レンズ20は被検査物1からの散乱光を集光するためのレンズである。
【0039】
被検査物1に形成されたパターンが繰り返し形状の場合、該繰り返しパターンから発生する回折光は、対物レンズ20の射出瞳に規則的な間隔で集光する。空間フィルタ21は瞳面上でこの繰り返しパターンの遮光を行うフィルタである。
【0040】
結像レンズ22は、繰り返しパターン以外(たとえば障害発生箇所)からの散乱光、回折光であって空間フィルタ21を通過したものをセンサ23上に結像するためのレンズである。
【0041】
センサ23は結像レンズ22によって集光結像された像を電子情報として信号処理部500に送るための光センサである。光センサの種別としてはCCDやCMOSなどが一般的ではあるが、ここではその種別は問わない。
【0042】
以下、対物レンズ20、空間フィルタ21、結像レンズ22、センサ23を総称して「検出系」と呼ぶ。
【0043】
レーザ101は、被検査物1上に所望のビームを形成するための照明光100を照射する。この照明光100により被検査物の法線方向に対して角度を有す方向から被検査物1の表面を照明し、被検査物1上に所望のビームを形成する。
【0044】
エキスパンダ102は、照明光100を一定の倍率の平行光束に広げるレーザビームエキスパンダーのことである。
【0045】
アッテネータ103は、エキスパンダ102通過後の照明光100の光量・強度を制御するための減衰器である。
【0046】
偏光制御素子104は、偏光板や波長板の回転、もしくは電圧のON・OFF制御によって液晶の分子の向きを変え、素子に入射する光の偏光方向を切り替え、偏光状態を制御する素子のことである。
【0047】
ミラー105A、105Bは偏光制御(電場の位相と振幅制御)後の照明光100を被検査物1に照射する際に、照射角度の調整を行うための反射鏡群である。
【0048】
レンズ106は、被検査物1に照射する直前に照射箇所に照明光100を収束させるためのレンズである。
【0049】
以下、これらのレーザ101、エキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105A、105Bを総括して「照明系」と呼ぶ。
【0050】
XYステージ300は被検査物1を載置するためのステージである。XYステージ300を平面方向に移動することで、被検査物1を走査する。
【0051】
Zステージ400は、XYステージ300の検査基準面(被検査物1を載置する面)を垂直方向(Z方向)に移動させるためのステージである。
【0052】
被検査物高さ計測部401は、このXYステージ300の検査基準面、及び被検査物1の高さを測定するための計測器である。Zステージ400と被検査物高さ計測部401によって、焦点位置合わせを自動で行う、オートフォーカス機能を提供する。
【0053】
信号処理部500は、センサ23より受け取った画像データをモニタ501で表示可能な状態に変換するための回路である。
【0054】
次に全体の動作について説明する。
【0055】
まず、レーザ101からの照明光100により、被検査物の法線方向に対して角度を有す方向から被検査物1の表面を照明し、被検査物1上に所望のビームを形成する。
【0056】
該ビームにより被検査物上の異物、欠陥、パターンから散乱、回折された光は、被検査物の法線方向に垂直な方向(上方)から、対物レンズ20により集光される。
【0057】
被検査物1に形成されたパターンが繰り返し形状の場合、該繰り返しパターンから発生する回折光は、対物レンズの射出瞳に規則的な間隔で集光するため、瞳面上に置かれた空間フィルタ21により遮光される。
【0058】
一方、繰り返しパターン以外からの散乱光、回折光は空間フィルタ21を通過し、結像レンズ22へと導かれ、センサ23上に結像される。
【0059】
被検査物1はXYステージ300上に載置され、このXYステージ300により走査することにより、被検査物1からの散乱光の2次元画像を得る。このとき、被検査物1と対物レンズ20との距離は被検査物高さ計測部401により測定されZステージ400により調整される。
【0060】
センサ23により取得された2次元画像は、信号処理部500にて異物種、欠陥種ごとに分類され、異物や欠陥の大きさが求められ、その結果がモニタ501に表示される。
【0061】
上記の暗視野欠陥検査装置の構成においては、装置状態をモニタリングする専用の機能はなく、較正用ウェハからの散乱光を用いて装置較正を行う。しかしながら、装置構成が複雑であり、調整箇所も多いなか、数学的記述が困難な散乱現象を用いて、装置較正を行うのは、非常に困難である。
【0062】
(第1の実施の形態)
上記の従来の実施の形態と対比する形で、本発明の第1の実施の形態について説明する。
【0063】
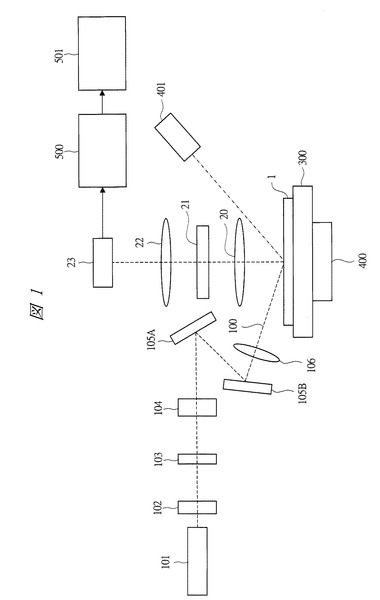
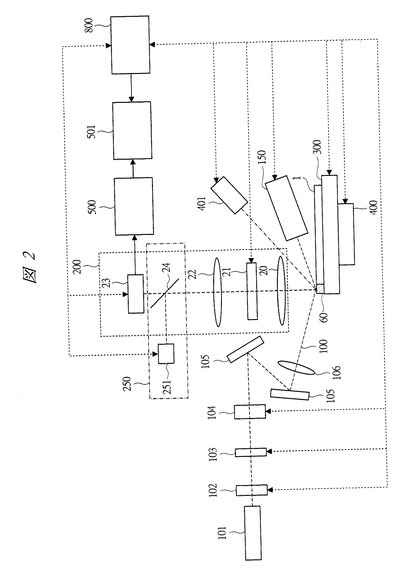
図2は本発明の第1の実施の形態に関わる暗視野欠陥検査装置の構成を表す図である。本実施の形態に関わる暗視野欠陥検査装置では、図1の暗視野欠陥検査装置の構成に加え、照明系モニタリング部150と、検出系モニタリング部250及び制御部800と、を有する。なお、図1で記載された事項については本図においても同一の処理である。個々の構成部材の説明、全体の動作については省略する。
【0064】
照明系モニタリング部150とは、照明光の状態を計測するセンサ回路である。暗視野欠陥検査装置においては、照明光を被検査物に当て、その散乱光を検出する。この際、照明光の強度分布と偏光状態分布に被検査物より生じる散乱光が依存している。そのため、照明光状態をモニタリングする必要がある。照明系モニタリング部150は、光の偏光状態および強度の空間2次元分布を計測する2次元偏光計測機能を持つ。2次元偏光計測機能は、偏光板や波長板などの偏光素子と検出器から構成され、照明光の正反射光である被測定光の所望の偏光成分を偏光素子により抽出し、その抽出した偏光成分を検出器にて検出した信号から被測定光の強度分布および偏光状態分布を決定する。
【0065】
検出系モニタリング部250とは、検出系の状態を計測するセンサ回路である。検出系モニタリング部250にはハーフミラー24とセンサ251が含まれる。
【0066】
制御部800は、照明系モニタリング部150と検出系モニタリング部250とで得られた値を比較し、フィードバック制御を行う制御回路である。
【0067】
図3は本発明の第1の実施の形態に関わる制御部800の内部構成を示すブロック図である。
【0068】
制御部800は、記録部801、比較部802、感度予測部803、フィードバック制御部804を含んで構成される。
【0069】
記録部801は、モニタリングした照明系モニタリング部150及び検出系モニタリング部250のデータを記録する回路である。
【0070】
比較部802は、記録部801で記録したデータをデータベース805内の理想値と比較する回路である。比較部802での処理前に、モニタリング時の光源や素子の特性を予め算出しておく。
【0071】
感度予測部803は、記録データと理想値の違いから現在の装置感度を推定・予測する回路である。
【0072】
フィードバック制御部804は、感度予測部803が予測した予測感度に応じて装置の各稼動部にフィードバックをかける回路である。
【0073】
データベース805は、比較部802が用いる理想値のデータベースである。このデータベース805には、理論計算や光学シミュレーションなどによって、理想値を入力しておく。このとき、光学シミュレータでは、被検査物をモデル化し、照明光学系の条件に依存して発生する被検査物からの散乱光強度などを導出し、検査器にて検出される光強度を計算する。このデータベース805の理想値のパラメータとしては、照明光学系の強度分布、偏光状態分布、結像レンズ22の焦点距離、センサ23の感度などの情報を含む。これらのパラメータは事前に特性を把握しておく必要がある。
【0074】
図4は本発明の第1の実施の形態に関わる暗視野欠陥検査装置におけるモニタリング処理手順を表すフローチャートである。
【0075】
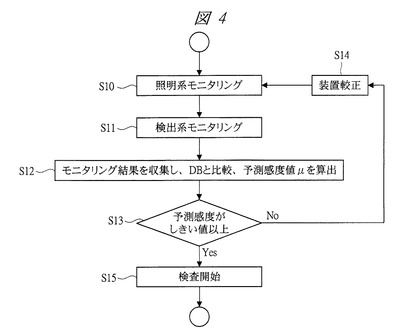
まず、照明系モニタリング部150が照明系の状態をモニタリングする(ステップS10)。また、検出系モニタリング部250が検出系の状態を計測する(ステップS11)。ステップS10及びステップS11で得られた計測結果は比較部802に送られる。これらの計測結果を、比較部802はデータベース805内の理想値と比較し、更に理想値と計測結果との「ずれ」から検出感度を予測する(ステップS12)。そして予測した検出感度が任意に設定した閾値と大小判定を行う(ステップS13)。
【0076】
予測感度が閾値以下の場合には、光学系の較正を行う(ステップS14)。ここで要較正箇所が全て自動制御できるなら、全ての較正作業を自動で行えるようにしてもよい。このとき較正箇所は予め理論計算もしくは光学系シミュレーションにて決定しておく。
【0077】
一方、予測感度が閾値以上の場合には、照明系及び検出系の検査を開始する(ステップS15)。
【0078】
これらの処理を行った後、再びステップS10に戻る。
【0079】
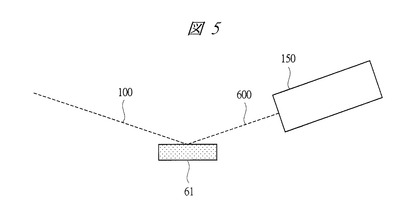
以下、照明系モニタリング部150のモニタリング処理を詳細に説明する。図5は照明系モニタリング部150によるモニタリング処理の概念を表す概念図である。
【0080】
まず、被検査物1に対する照射に先立ち、照明光100をXYステージ300上に載置された参照ミラー61に照射する。参照ミラー61は検査対象である被検査物1上に存在すると想定される異物、被検査物1の欠陥に比べ表面の凹凸が少ない反射鏡である。この参照ミラー61の大きさは、照明光の広がり以上である。
【0081】
参照ミラー61に照射し、反射した正反射光600の二次元偏光状態分布(強度分布)を照明系モニタリング部150にて計測する。参照ミラー61の材質及び照明仰角が既知であるものを用いることで、反射による振幅と位相の変化を与えるフレネル係数を制御部800ないしは照明系モニタリング部150が計算し、正反射光600の強度分布と偏光状態分布から照明光100の強度分布と偏光状態分布を算出する。
【0082】
上記のように計測と理論計算を用いて、照明光の二次元偏光分布(強度分布を含む)をモニタリングすることで後述する予測感度μを高精度に求めることが可能となる。
【0083】
照明光100の強度分布を較正するには照明系である、レーザ101、エキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105A、105Bなどを調整し、偏光分布を較正するには偏光制御素子104などを調整する。
【0084】
以上のように、照明系のモニタリングを行う際、正反射光600を用いて較正に用いるパラメータを取得する。
【0085】
次に、検出系モニタリング部250のモニタリング処理を詳細に説明する。検出系モニタリング部250では点光源や任意の回折光がいかに検出されるかをハーフミラー24とセンサ251で計測し、状態を把握する。
【0086】
はじめに点光源による検出系のモニタリングについて説明する。
【0087】
点光源から出射される光を検出系に導入し、対物レンズ20と結像レンズ22にてセンサ23上に結像した点光源の像を観察することで、レンズの結像特性である分解能、レンズ透過後による波面収差の変化などをモニタリングする。また、ステージ高さを上下させながら点像を測定することで、Zステージ400が適切に働いているかを確認できる。さらに、XYステージ300を移動させながら、任意の位置にてZステージ400を上下させる。この状態で被検査物高さ計測部401の信号を検出することで、XYステージ300の移動による高さ方向の変動を計測できる。レンズとXYステージ300とZステージ400の調整後、点像をセンサ23に入射し、ゲインを較正する。
【0088】
ここで点光源は、拡散板上でスポットとなるよう光束を集光することで、拡散板上から点光源を得て使用する。ここで利用する拡散板は散乱光量の仰角、方位依存性が小さい(理想的にはゼロ)ことが望ましい。なお、本実施の形態では拡散板を利用しているが、拡散板の代わりに波長に比べ直径の小さい微小球体を用いて、これに照明光を照射することで得てもよい。
【0089】
次に、回折光を用いた検出系のモニタリングについて説明する。
【0090】
特定の方向に回折する回折光は、拡散板や微小球体の代わりに任意の回折格子により生成する。射出瞳上では、回折光の方向に依存した方向に点像が規則的に配列する。この点像の規則的な配列を遮光するよう空間フィルタの駆動部と実際の移動距離をモニタリングし較正することで、被検査物の持つ特定の周期構造を精密に除去する。
【0091】
回折格子に関しては、複数の異なる方向、周期の溝があるものを用意することで、より詳細に空間フィルタの動作をモニタリングする。
【0092】
点光源生成のための拡散板、回折光生成のための回折格子共にXYステージ300上に設置し、被検査物の載置前もしくは後にモニタリング用素子として利用する。
【0093】
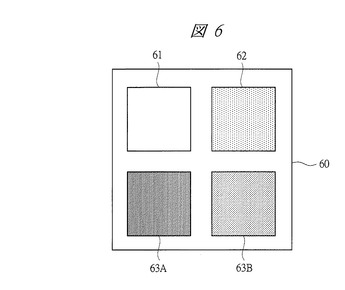
図6は照明系と検出系のモニタリングに使用するモニタリング用チップ60を表す図である。
【0094】
このモニタリング用チップ60には、照明系モニタリングで用いる参照ミラー61、検出系モニタリングの点光源生成で用いる拡散板62、検出系モニタリングの回折光生成で用いられる回折格子63A、63Bが含まれる。これらを一つにまとめることで、ステージ移動量が減少し、効率的に装置のモニタリングを実施することができる。
【0095】
次に、装置状態のモニタリング結果を利用した装置感度予測と装置較正について説明する。
【0096】
検査装置の検査感度は、半導体ウェハ上の検出可能な異物や欠陥の大きさ、もしくは異物や欠陥からの散乱光強度そのものを指す。装置状態が理想からずれていると、検査感度は低下する。そこで、モニタリングした装置状態を表す物理量と、その物理量の理想状態との差から検査感度を表す指標を算出し、検査感度を一定以上に保つように装置較正を行う。
【0097】
ここで「装置状態を表す物理量」とは、照明光学系の強度分布、偏光状態分布、検出レンズ焦点距離、検出感度などを示す。また各物理量のモニタリングは、被検査物計測の合間または常時行う。
【0098】
このときモニタリングする物理量の理想値は、設計値、理論計算値、光学シミュレーションから算出した値の全て若しくはいずれかを用いる。
【0099】
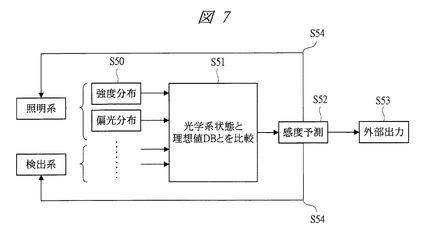
図7は、装置較正手順の一例を示す概念図である。
【0100】
照明系と検出系のモニタリングした物理量をFiとし、これを比較部802に送信する(ステップS50)。物理量Fiと理想値Giの差の二乗をAiで重み付けした
Ei=Ai(Fi−Gi)2 …(式1)
により、理想値データベースと比較を行う(ステップS51)。
【0101】
全てのモニタリング値の理想からのずれを
E=ΣEi …(式2)
と表す。(式2)で求めたEにより表される感度に関する指標、
μ=1/(1−E) …(式3)
を用いて感度予測部803は感度を予測する(ステップS52)。
【0102】
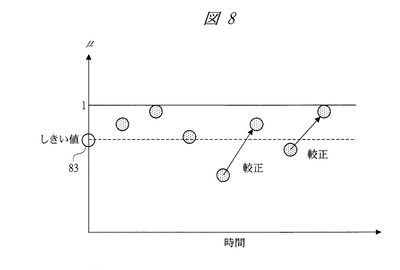
この指標をモニタ501を経由して外部出力することで、操作者が視覚的に装置状態を判断する目安にすることも可能である(ステップS53)。また、μについて所定の閾値を設定しておき、μが閾値以下になったときに装置パラメータを較正する処置をとってもよい(ステップS54)。
【0103】
図8は閾値による装置パラメータの較正処理に関するグラフである。この図では閾値83を基準とする。ここで閾値83は装置性能に関するパラメータであり、安定検査など装置の使用目的によりその値が決定される。高感度検査マイクロの値が閾値83以下となると、μの値が1に近づくように較正を行う。較正後は再度モニタリングを実施、較正の効果の有効性を確認する。
【0104】
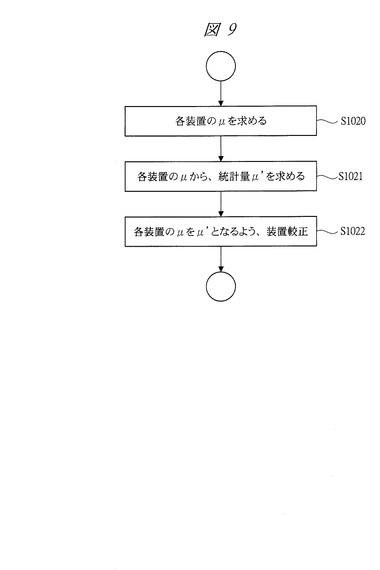
この感度予測部803により予測された感度(予測感度)μは、装置間の性能均一化に用いることができる。すなわち、検出感度を表す全ての指標において、複数台の暗視野欠陥検査装置の性能を完全に一致させることは現実的でない。そこで、予測感度の統計値を目標値として性能の均一化を図る。図9は本実施の形態における複数台の暗視野欠陥検査装置の性能均一化の処理手順を表すフローチャートである。
【0105】
まず、複数台の暗視野欠陥検査装置それぞれについて予測感度μを導出する(ステップS1020)。複数台の暗視野欠陥検査装置それぞれの予測感度μから統計量μ´を感度の目安とする(ステップS1021)。そして、各装置のμがμ´となるように、各装置のフィードバック制御部804が装置較正を施す(ステップS1022)。
【0106】
また、照明光や検出系などの装置較正に関するパラメータのほか、装置内の環境を表すパラメータである温度、気圧、湿度のパラメータも同時にモニタリングする。一般に光学素子の特性は、使用環境により変動する。たとえば、レンズを構成するガラスの屈折率は温度依存性を持ち、レンズ周辺の温度によって焦点距離、波面収差などが変動する。従って、光学素子調整の際には、上記の装置環境に関するパラメータを考慮する必要がある。
【0107】
全てのもしくは一部のモニタリングした物理量、予測感度μの経時変化、被検査物の測定時間を記録し、装置の状態把握と故障の予知に活用する。なお、各物理量のモニタリングは、被検査物計測の合間、常時、1週間に一回など定期的に、もしくは装置の電源投入時に行う。
【0108】
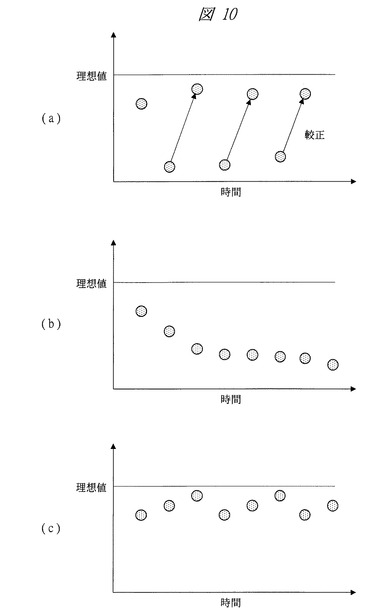
図10は暗視野欠陥検査装置の予測感度μの挙動により、どのような障害が考えられるかを表す概念図である。
【0109】
たとえば図10(a)のように、較正を繰り返してもモニタリング値がすぐに低下する場合、または同図(b)のように、較正してもモニタリング値が改善しない場合などは、装置自体に何らかの問題を含んでいると想定される。従って、操作者(もしくは装置管理者)は部品交換等の必要性を感じ取ることができる。また、図10(c)のように時間的に周期的にモニタリング値が変化する場合、装置内外のいずれかにモニタリング値の変動要因があると考えられる。
【0110】
予測感度μが短期間に所定の回数閾値以下になった場合にはモニタ501に警告を出してもよい。図11は本実施の形態での警告を伝える画面である。
【0111】
このように個々の暗視野欠陥検査装置それぞれについて予測感度μを導出し較正を行うだけでなく、複数の暗視野欠陥検査装置の予測感度μから統計量μ´を求め、統計量μ´に近づくように個々の暗視野欠陥検査装置の較正を行うことで、装置間感度差の軽減を図ることが可能となる。
【0112】
また統計量μ´の代わりに、光学シミュレーションにより導出した装置状態を表す物理量を導出し、その物理量より推定した検出感度を装置較正の目安として用いても良い。
【0113】
以下、本実施の形態の変形例を述べる。
【0114】
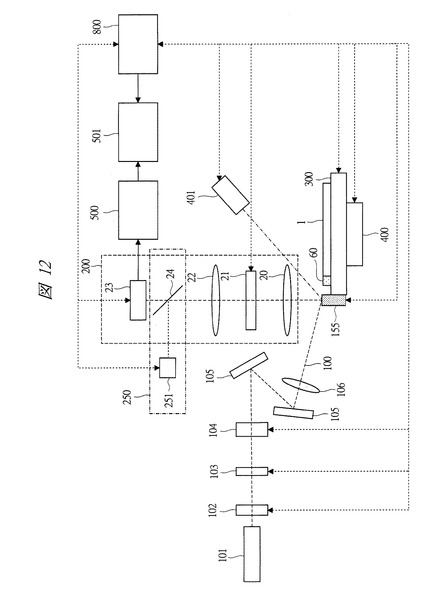
図12は本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の構成を表す図である。この図の暗視野欠陥検査装置の構成では、検出系のモニタリングに用いる点光源発生部155をXYステージ300側部に有する。この点光源発生部155を用いて検出系のモニタリングを行う点が図2の暗視野欠陥検査装置と相違する。
【0115】
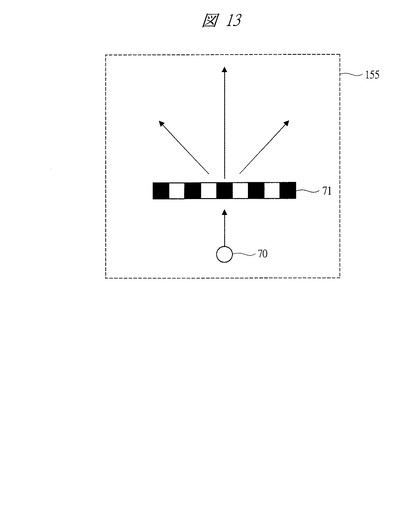
図13はこの点光源発生部155の構成を表す図である。
【0116】
点光源発生部155には光源70と透過型空間フィルタ71を含む。この光源70の出力する光を、透過型空間フィルタ71を介して検出系に入射する。
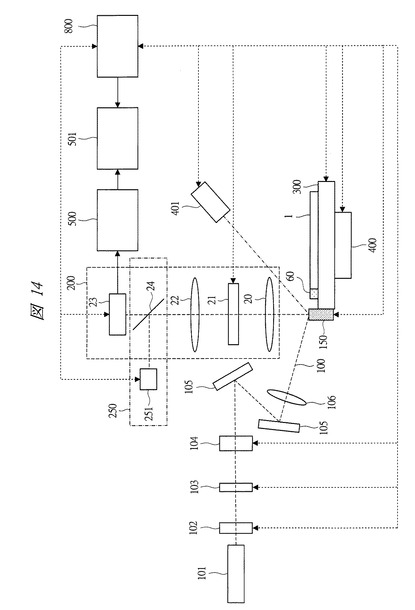
【0117】
また図14は本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の構成を表す図である。この図の暗視野欠陥検査装置では、XYステージ300上において直接、照明光の2次元偏光分布を計測している。すなわち、XYステージ300側部に照明系モニタリング部150を有し、これを用いて測定の合間に照明光の2次元偏光分布をモニタリングする。正反射光600を用いる手法と比べ、より正確に照明光の状態をモニタリングすることができる。なお、このような場合、モニタリング用チップ60には検出系モニタリングの点光源生成で用いる拡散板62、検出系モニタリングの回折光生成で用いられる回折格子63A、63Bがあればよく、参照ミラー61は不要となる。
【0118】
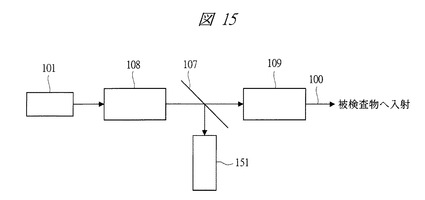
図15は本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の照明系モニタリングの構成を表す図である。本図の照明系モニタリングにおいては、照明系が被検査面に到達する前に、高度分布と偏光状態分布をモニタリングし、検査面での状態を理論計算にて導く。照明系の途中にて、ハーフミラー107などを用いて一方を照明光100とし、他方をモニタリング用の光として照明系モニタリング部151にて検出する。
【0119】
光学素子群108と109は、それぞれエキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105、レンズ106のいずれかからなる。
【0120】
照明系モニタリング部151では、2次元の偏光状態分布を計測し、ハーフミラー107透過後の素子である偏光素子やミラー等の光学特性より、被検査面での照明光100の状態を算出する。ここで、光の偏光状態(強度分布を含む)は、1×4のベクトルを用いて表示することができ、これをストークスベクトルという。また、光学素子はストークスベクトルを結ぶ4×4の行列として記述することができ、これをミューラー行列という。制御部800または照明系モニタリング部151は、このストークスベクトル、ミューラー行列を用いて照明光の偏光状態を計算する。
【0121】
この形態の最も大きなメリットは、光路中にて光を分岐し検出しているため、リアルタイムのモニタリングが可能な点である。なお、本図の暗視野欠陥検査装置においても、モニタリング用チップ60には参照ミラー61は必要ない。
【0122】
(第2の実施の形態)
次に本発明の第2の実施の形態について説明する。
【0123】
この第2の実施の形態の構成は図2に表す暗視野欠陥検査装置の構成と同じである。第1の実施の形態との相違点は、制御部800での処理である。
【0124】
本実施の形態において制御部800は、照明光100の強度・偏光状態をモニタリングする照明系モニタリング部150、検出系の結像性能、空間フィルタ21の駆動情報、XYステージ300、Zステージ400と、被検査物高さ計測部401からなるオートフォーカス等のモニタリングを行う検出系モニタリング部250を制御する。
【0125】
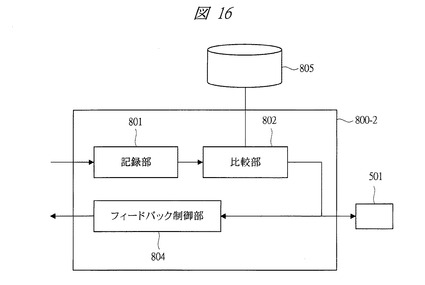
図16は、本実施の形態に関わる制御部800−2の内部構成を示すブロック図である。
【0126】
この制御部800−2は記録部801、比較部802、フィードバック制御部804を含む。
【0127】
記録部801はモニタリングしたデータを記録する回路である。
【0128】
比較部802は記録部801が記録した記録データを予め理論計算や光学シミュレーションなどにより算出しておいた装置状態とモニタリング結果を対応付けるデータベース805と比較する回路である。
【0129】
フィードバック制御部804は、実測値との差が小さくなるデータベース805の値を求め、そのデータベースの値を計算したときに仮定した装置状態を実際の装置の状態とし、理想の装置状態となるよう装置の各部にフィードバック制御をかける回路である。
【0130】
すなわち、第1の実施の形態では、現実の測定結果と理想値を対比し、装置の現状を推定・予測する感度予測部803が存在したが、本実施の形態ではそのような推定は行わない点が相違する。
【0131】
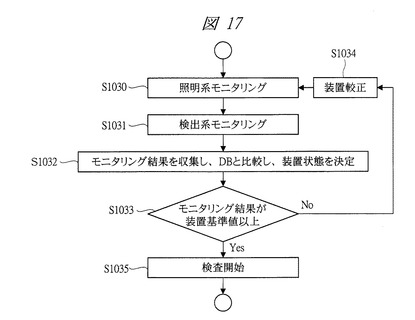
図17は、この制御部800−2によるモニタリング及び較正の処理手順を表すフローチャートである。
【0132】
まず、照明系モニタリング部150が照明系のモニタリングを行う(ステップS1030)。また検出系モニタリング部250が検出系の状態をモニタリングする(ステップS1031)。ステップS1030及びステップS1031のモニタリング結果は、比較部802に送られる。比較部802はデータベース805と対比して、現在の暗視野欠陥検査装置の装置状態を決定する(ステップS1032)。比較部802はデータベース805と対比して求めた装置状態と任意に設定した装置基準を比較する(ステップS1033)。
【0133】
基準以下の場合には、光学系の調整を行い(ステップS1034)、その後再び照明系のモニタリング(ステップS1030)に戻る。このとき、較正箇所は、あらかじめ理論計算もしくは光学シミュレーションにて決定しておく。このとき、光学シミュレータでは、被検査物をモデル化し、照明光学系の条件に依存して発生する被検査物からの散乱光強度などを導出し、検査器にて検出される光強度を計算した結果を用いて、構成箇所を決定してもよい。
【0134】
一方、基準以上であれば、操作者に警報等を出すなどにより暗視野欠陥検査装置の検査を行う(ステップS1035)。
【0135】
(第3の実施の形態)
次に本発明の第3の実施の形態について説明する。
【0136】
本発明に関わる暗視野欠陥検査装置は、被検査物1の表面を照明光100により被検査物1の法線方向に対して角度を有する方向から照明し、被検査物1上に所望のビームを形成する。該ビームにより被検査物1上の異物、欠陥、パターンから散乱、回折された光は、被検査物1の法線方向に垂直な方向(上方)から対物レンズ20により集光される。
【0137】
被検査物1に形成されたパターンが繰り返し形状の場合、該繰り返しパターンから発生する回折光は、対物レンズ20の射出瞳に規則的な間隔で集光するため、瞳面上に置かれた空間フィルタ21により遮光される。一方、繰り返しパターン以外からの散乱光、回折光は空間フィルタ21を通過し、結像レンズ22へ導かれる。その後、これらの散乱光、回折光はセンサ23上に結像される。被検査物1はXYステージ300上に載置され、XYステージ300により、X方向、Y方向に走査することにより、該被検査物1の散乱光の二次元画像を得る。このとき、被検査物とレンズとの距離は被検査物高さ計測部401により測定される。この被検査物高さ計測部401により測定された情報は、Zステージ400により調整される。センサ23により取得された二次元画像を元に、信号処理部500にて異物と欠陥の有無が判定される。このとき、信号処理部500にて異物種と欠陥種ごとに分類し、大きさを求め、その結果をモニタ501に表示する。
【0138】
照明光100が複数の光学素子、レーザ101、エキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105A、105B、レンズ106による「照明系」によって生成されるのは第1の実施の形態と同様である。また、照明光100の強度、偏光状態をモニタリングするための照明系モニタリング部150、検出系モニタリング部250、検出系のモニタリング用光源を生成するモニタリング用チップ60を制御する制御部800−3を有する点も同じである。
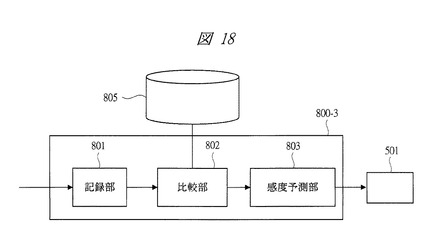
【0139】
図18は本発明の第3の実施の形態に関わる制御部800−3の内部構成を示すブロック図である。この制御部800−3は記録部801、比較部802、感度予測部803を含んで構成される。
【0140】
記録部801は、モニタリングしたデータを記録する回路である。
【0141】
比較部802は、記録部801が記録した記録データと理想値のデータベース805とを比較する回路である。
【0142】
感度予測部803は、記録データと理想値との違いから装置感度を予測する回路である。
【0143】
データベース805は予めモニタリング時の光源や素子の特性を算出しておき、それらを用いて理論計算や光学シミュレーションなどによって作成された理論値のデータベースである。このとき、光学シミュレータでは、被検査物をモデル化し、照明光学系の条件に依存して発生する被検査物からの散乱光強度などを導出し、検査器にて検出される光強度を計算した結果をデータベースとして用いても良い。
【0144】
すなわち第1の実施の形態及び第2の実施の形態と相違し、本実施の形態では、フィードバック制御部804が存在しない。これにより、装置に対する自動補正を行わない環境では、軽量な回路構成を実現することが可能となる。
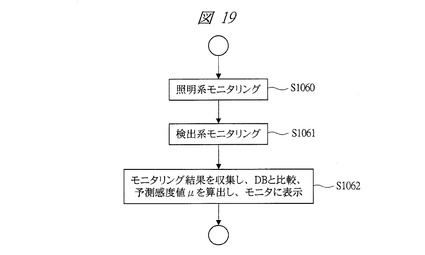
【0145】
図19は本発明の第3の実施の形態に関わる制御部800−3によるモニタリングの処理手順を表すフローチャートである。
【0146】
まず照明系モニタリング部150が照明系の状態をモニタリングする(ステップS1060)。また、検出系モニタリング部が検出系の状態を計測する(ステップS1061)。これらの検出値は比較部802に送信される。
【0147】
比較部802は、これらの計測結果を収集し、データベース805の理論値と比較する。そして、データベース805の理想値とモニタリング値のずれから検出感度を予測する(ステップS1062)。
【0148】
なお、照明系モニタリング部150のモニタリング処理、検出系モニタリング部250のモニタリング処理は第1の実施の形態のそれと同じなので省略する。図5及び図6、それらの説明を確認されたい。
【0149】
次に、装置状態のモニタリング結果を利用した装置感度予測について説明する。検査装置の検査感度は、半導体ウェハ(被検査物1)上の検出可能な異物・欠陥の大きさ、もしくは異物や欠陥からの散乱光強度そのものを指す。装置状態が理想的な条件からずれていると、検査感度は低下する。そこで、モニタリングした装置状態を表す物理量と、その物理量の理想状態との差から検査感度を表す指標を算出し、検査感度を一定以上に保つよう装置較正を行う。
【0150】
ここで、装置状態を表す物理量とは、照明系の強度分布、偏光状態分布、検出レンズ焦点距離、検出器感度などを示す。また、各物理量のモニタリングは被検査物1の計測の合間または常時行う。このとき、モニタリングする物理量の理想値は設計値、理論計算で求めた値、光学シミュレーションから算出した値の全てもしくはいずれかを用いる。また、照明系、検出系等のパラメータのほか、装置内の環境を表すパラメータである温度、気圧、湿度のパラメータも同時にモニタリングする。一般的に、光学素子の特性は、使用環境により変動する。たとえば、レンズを構成するガラスの屈折率は温度依存性を持ち、レンズ周辺の温度によって焦点距離、波面収差などが変動する。従って、光学素子調整の際には、上記の装置環境に関するパラメータを考慮しておく必要がある。
【0151】
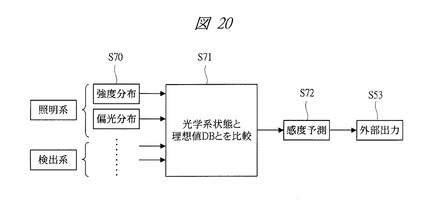
図20は装置較正の処理手順を表すフローチャートである。この図を用いて装置較正の処理手順を説明する。
【0152】
まず、照明系及び検出系それぞれの物理量を照明系モニタリング部150及び検出系モニタリング部250より受け取る(ステップS70)。この実際の検出値をFiと定義する。
【0153】
Fiと理想値Giの差を二乗しAiで重み付けした(式1)により、データベース805に格納された各理想値との対比を行う(ステップS71)。全てのモニタリング値の理想からのずれを表す(式2)を用いた(式3)を指標として感度を予測する(ステップS72)。この指標をモニタ501を経由して外部出力することで、操作者が視覚的に装置状態を判断する目安にすることを可能にする(ステップS73)。
【0154】
(第4の実施の形態)
次に本発明の第4の実施の形態について説明する。本実施の形態においても、暗視野欠陥検査装置の構成は図2と同様である。
【0155】
被検査物1の表面を、レーザ101から発光される照明光100により被検査物1の法線方向に対して角度を有する方向から照明し、被検査物1上に所望のビームを形成する。該ビームにより被検査物1上の異物、欠陥、パターンから散乱・回折された光は、被検査物1の法線方向に対して垂直な方向(上方)から、対物レンズ20により集光される。被検査物1に形成されたパターンが繰り返し形状の場合に、該繰り返しパターンから発生する回折光は、対物レンズ20の射出瞳に規則的な間隔で集光されるため、瞳面上に置かれた空間フィルタ21により遮光される。一方、繰り返しパターン以外からの散乱光、回折光は空間フィルタ21を通過し、結像レンズ22へ導かれ、センサ23上に結像する。
【0156】
照明光100が照明系によって生成されるのは、第1の実施の形態同様である。
【0157】
被検査物1はXYステージ300上に載置され、XYステージ300によりX、Y方向(平面方向)に走査される。これにより、センサ23が被検査物1の散乱光の二次元画像を得ることができる。
【0158】
被検査物1と対物レンズ20との距離は被検査物高さ計測部401により測定され、Zステージ400により調整される。この調整により、オートフォーカス機能を実現することが可能である。
【0159】
センサ23が取得した二次元画像を元に、信号処理部500は異物・欠陥の有無を判定する。信号処理部500は異物と欠陥種ごとに分類し、大きさを求め、その結果をモニタ501に表示する。
【0160】
制御部800−4は照明系モニタリング部150、検出系モニタリング部250、モニタリング用の光源を生成するモニタリング用チップ60を制御する。なお、照明系モニタリング部150と検出系モニタリング部250の構成・挙動及びモニタリング用チップ60の構成は第1の実施の形態と同様であるので省略する。
【0161】
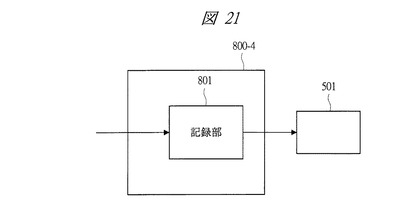
図21は本実施の形態の制御部800−4の内部構成を示すブロック図である。第1の実施の形態がフィードバックまで考慮しているのに対し、本実施の形態では、各モニタリング部の検出結果をモニタ501に出力するのみである。従って、制御部800−4には記録部801のみ含まれる。記録部801はモニタ501に各モニタリング部の検出結果を出力するための出力制御回路である。なお、必要があれば、データベース805から各種条件に応じた理想的な値を読み出せるようにしてもよい。
【0162】
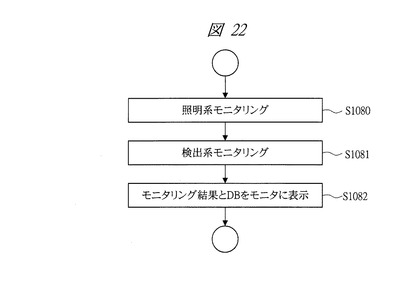
図22は本実施の形態に関わる暗視野欠陥検査装置におけるモニタリング処理手順を表すフローチャートである。これを用いて制御部800−4の動作について説明する。
【0163】
まず、照明系モニタリング部150がモニタリング結果を記録部801に送信する(ステップS1080)。また検出系モニタリング部250もモニタリング結果を記録部801に送信する(ステップS1081)。記録部801は必要があればデータベース805から各種条件に応じた理想的な値を読み出し、各モニタリング部の検出結果と合わせてモニタ501に出力する(ステップS1082)。
【0164】
以上の構成を取ることで、モニタリングした値をモニタ501から暗視野欠陥検査装置の操作者に開示することが可能となる。これにより、操作者は適宜暗視野欠陥検査装置の装置状態を確認することができ、結果暗視野欠陥検査装置の調整の契機とすることが可能となる。
【0165】
(第5の実施の形態)
以下、第5の実施の形態について図を用いて説明する。本実施の形態と第1の実施の形態との相違点は、検出レンズの波面収差のモニタリング方法について詳細のものとした点にある。
【0166】
本実施の形態における暗視野欠陥検査装置の構成は第1の実施の形態に関わる図2と同様である。したがって図2を参考にしながら、装置構成を説明する。
【0167】
レーザ101から発光される照明光100により被検査物1の表面を、法線方向に対して角度を有する方向から照明することで、被検査物1上に所望のビームを形成する。
【0168】
該ビームにより被検査物1上の異物、欠陥、パターンから散乱・回折された光は、被検査物1の法線方向に対して垂直な方向(図では上方)から、対物レンズ20により集光される。被検査物1に形成されたパターンが繰り返し形状の場合には、該繰り返しパターンから発生する回折光は対物レンズ20の出射瞳に規則的な間隔で集光される。このため、この回折光は瞳面上に置かれた空間フィルタ21により遮光される。
【0169】
一方、繰り返しパターン以外からの散乱光、回折光は空間フィルタ21を通過し、結像レンズ22に導かれ、センサ23上に結像する。また、空間フィルタ21の位置において、図示しないハーフミラーにて光を分岐し、瞳面を観察する検出器を本実施の形態では備える。
【0170】
照明光100が照明系によって生成されるのは、第1の実施の形態同様である。
【0171】
被検査物1はXYステージ300上に載置される。また被検査物1はXYステージ300によりXY方向(平面方向)に走査される。これにより、センサ23は被検査物1の散乱光の結像画像を得ることができる。
【0172】
被検査物1と対物レンズ20との距離は被検査物高さ計測部401により測定される。そしてこの測定結果によりZステージ400によって、被検査物1と対物レンズ20との距離が調整される。この被検査物1と対物レンズ20との距離の調整により、オートフォーカス機能を実現することが可能となる。
【0173】
センサ23が取得した結像画像を元に、信号処理部500は異物・欠陥の有無を判定する。信号処理部500は、異物と欠陥種毎に分類し、大きさを求め、その結果をモニタ501に表示する。
【0174】
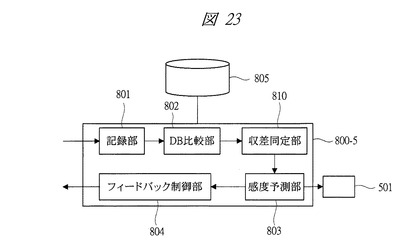
本実施の形態においても、制御部800−5は、照明系モニタリング部150と検出系モニタリング部250とで得られた値を比較し、フィードバック制御を行う制御回路である。図23は本実施の形態に関わる制御部800−5の内部構成を表すブロック図である。
【0175】
本実施の形態に関わる制御部800−5は、記録部801、比較部802、収差同定部810、感度予測部803、フィードバック制御部804を含んで構成される。
【0176】
記録部801は、モニタリングした照明系モニタリング部150及び検出系モニタリング部250のデータを記録する回路である。
【0177】
比較部802は、記録部801で記録したデータをデータベース805内の理想値と比較する回路である。比較部802での処理前に、モニタリング時の光源や素子の特性に依存したモニタリング値を予め算出しておく。
【0178】
収差同定部810は、検出レンズの波面収差を同定するために用いる回路である。
【0179】
感度予測部803は、記録データと理想値の違いから現在の装置感度を推定・予測する回路である。
【0180】
フィードバック制御部804は、感度予測部803が予測した予測感度に応じて装置の各可動部にフィードバックをかける回路である。
【0181】
データベース805は、比較部802が用いる理想値のデータベースである。このデータベース805には、理論計算や光学シミュレーションなどによって求められた理想値を入力しておく。このデータベース805の理想値のパラメータとしては、照明光学系の強度分布、偏光状態分布、結像レンズ22の焦点距離、対物レンズと結像レンズの波面収差により劣化した像、センサ23の感度などの情報を含む。これらをパラメータとし、事前に多くの理論計算を行い、データベースを作成する。
【0182】
以下、照明系のモニタリング、検出系のモニタリングの手法について説明する。ここでは、第1の実施の形態との相違点である検出レンズの結像特性を表す波面収差のモニタリング方法に注力して説明する。なお、光学系の構成は図2と同様である。
【0183】
対物レンズ20と結像レンズ22からなる検出レンズの波面収差の影響により、センサ23に結像される像は広がる。
【0184】
ここで波面収差は、空間2次元の位相分布で表され、この位相分布はゼルニケ(Zernike)多項式にて分解することができる。このゼルニケ多項式の各項が球面収差、コマ収差、非点収差などの、異なる収差成分を示している。ゼルニケ係数とは、このゼルニケ多項式の各項の収差成分の大きさを表す重み付け係数のことを言う。
【0185】
本実施の形態では、装置上にて得られる像と、収差を表すゼルニケ係数をパラメータとして、理論的に算出した収差に依存する像の分布関数とを比較し、検出レンズの収差を表すゼルニケ係数を解析する。
【0186】
このゼルニケ係数の解析時に使用する光としては、被検査対象物からの散乱光を用いても良いし、検出系モニタリング時に用いる回折格子からの回折光、もしくは点光源を用いても良い。いずれの場合も、波面収差による像の変化から、波面収差の大きさを逆算する。なお、以下では点像を用いた場合について述べることとする。
【0187】
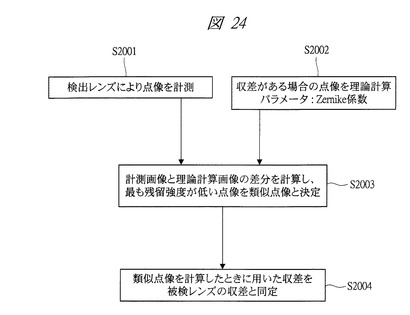
図24は本実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。これを用いて検出レンズの収差同定フローを説明する。
【0188】
点光源から出射された光を結像レンズ22へ導き、センサ23上で結像させ、信号処理部500は結像した点像を制御部800−5内の記録部に801に記録する(ステップS2001)。また、予め収差を表すゼルニケ係数をパラメータとして、検出レンズの波面収差が様々な場合の点像を理論的に計算し、データベース805に記録しておく(ステップS2002)。
【0189】
次に、制御部800−5内の比較部802により、ステップS2001で取得した点像とステップS2002にて計算した多数の点像のそれぞれの差分を求め、画像の一部もしくは全体で残留強度を計算する(ステップS2003)。そして、制御部800−5内の収差同定部810にて、差分画像の残留強度が最も低かった点像を類似点像とし、類似点像を計算したときの収差を、結像レンズ収差と同定する(ステップS2004)。
【0190】
また差分画像を用いる代わりに、各画像の強度分布のプロファイルを、画像内の複数の軸にて差分を基準として、類似点像を探索しても良い。
【0191】
ここで、点光源は、拡散板上でスポットとなるように光束を集光することで、拡散板上から点光源を得て使用する。この際利用する拡散板は散乱光量の仰角、方位への依存性が小さいこと(理想的には0)であることが望ましい。なお、本実施の形態では拡散板を使用する旨記したが、拡散板の代わりに波長に比べ直径の小さい微小球体を用いて、照明光をこれに照射することで得ても良い。また、XYステージ300の端に点光源そのものを設置してもよい。
【0192】
なお、収差以外の照明系と検出系のモニタリング、結果の装置へのフィードバックは第1の実施の形態同様であるので、説明を省略する。
【0193】
以上のように、本実施の形態によって、データベースから近似する波面収差のデータを抽出することでモニタリングによる結像レンズ22の自動較正を高速に実行する手段を提供することが可能となる。
【0194】
(第6の実施の形態)
以下、第6の実施の形態について図を用いて説明する。
【0195】
本実施の形態は第5の実施の形態の処理フローの一部を変更することで、より高精度な自動較正手段を提供することを目的とする。
【0196】
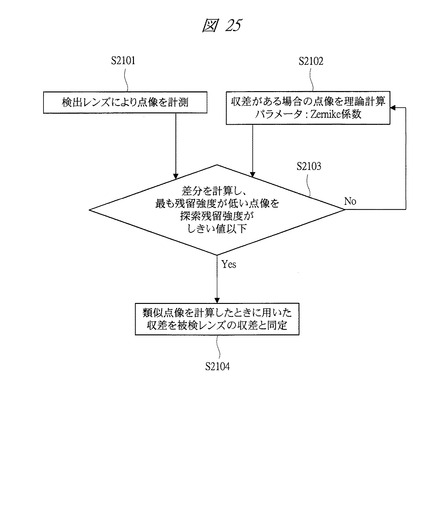
図25は本実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。これを用いて、第6の実施の形態に関する検出レンズの収差同定フローを説明する。なお、この実施の形態でも点像を用いた場合について述べることとする。
【0197】
点光源から出射された光を結像レンズ22へと導き、センサ23上で結像させ、信号処理部500は結像した点像を制御部800−5内の記録部に801に記録する(ステップS2101)。また予め収差を表すゼルニケ係数をパラメータとして検出レンズの波面収差が様々な場合の点像を理論的に計算し、データベース805に記録しておく(ステップS2102)。
【0198】
次に、制御部800−5内の比較部802によりステップS2101にて取得した点像とステップS2102にて計算した多数の点像のそれぞれの差分を求める。そして、比較部802は差分画像の一部または全部にて残留強度を算出し、その残留強度の最小値と任意に決めた閾値を比較する(ステップS2103)。
【0199】
このとき、最小の残留強度が閾値以上であれば(ステップS2103:No)、収差パラメータを変えて、閾値以下になるまで多数の点像を理論計算し、類似点像を探索する。
【0200】
一方、最小の残留強度が閾値以下であれば(ステップS2103:Yes)、制御部800−5中の収差同定部810にて、差分画像の残留強度が最も低かった点像を類似点像とする(ステップS2104)。この類似点像を計算したときの収差を、結像レンズ収差と同定することで結像レンズ22の自動較正が完了する。
【0201】
以上のように、本実施の形態によって、データベースから近似する波面収差のデータを抽出することでモニタリングによる結像レンズ22の自動較正を高速かつ高精度に実行する手段を提供することが可能となる。
【0202】
なお、収差同定に用いるのは点像でなくとも、被検査物からの散乱光を用いても良いし、検出器モニタリング時に用いる回折格子からの回折光を用いても良い。
【0203】
また、差分画像を用いる代わりに、各画像の強度分布のプロファイルを、画像内の複数の軸にて差分を基準として、類似点像を探索しても良い。
【0204】
(第7の実施の形態)
以下、第7の実施の形態について図を用いて説明する。
【0205】
本実施の形態と本実施の形態の相違点は、結像レンズ22の収差同定フローのみであるため、その他の説明は省略する。
【0206】
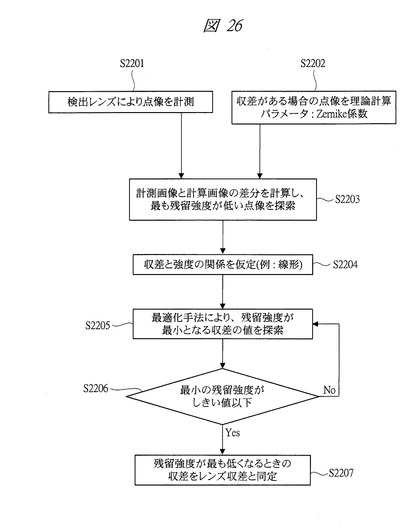
図26は本実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。これを用いて、第7の実施の形態に関する検出レンズの収差同定フローを説明する。
【0207】
点光源から出射された光を検出レンズに導き、センサ23上に結像させる。この結像した点像から求められた画像データは制御部800−5中の記録部に記録される(ステップS2201)。
【0208】
また、予め収差を表すゼルニケ係数をパラメータとし、検出レンズの波面収差が様々な場合の点像を理論的に計算する。そして、この計算結果をデータベース805に記録しておく(ステップS2202)。
【0209】
次に、制御部800−5内の比較部802により、ステップS2201にて取得した点像の画像データと、ステップS2202でデータベース805中に格納した多数の点像の計算結果との間でそれぞれ差分を求める。そして、差分画像の一部又は全部で残留強度を算出し、その残留強度の最小値となる画像を選択する。ここで収差の変化が小さいときには、点像の強度分布の変化は収差に対する変化を近似することができる(ステップS2204)。
【0210】
このステップS2204で求めた強度分布の変化を線形変化もしくは非線形変化とし、数式を仮定する。この仮定が成り立つ範囲で最適化手法を用いて、残留強度が最小となる収差パラメータを探索する(ステップS2205)。この最適化手法としては、ベンバーグ・マーカート法や最急降下法などを用いることが考えられるが、これらには拘らない。
【0211】
探索した残留強度の最小値と任意に設定した閾値とを比較し(ステップS2206)、この最小値が閾値以下の場合には(ステップS2206:Yes)、差分画像の残留強度が最も低かった点像を類似点像と推定する。そしてこの類似点像と推定された点像の収差を、結像レンズ収差と同定する(ステップS2207)。
【0212】
一方このステップS2206で求めた最小値が閾値より大きい場合(ステップS2206:No)、ローカルミニマム(局所的な最小値)である可能性が高い。そこで、最適化手法の各収差パラメータ間の相関関係などによる制約条件を再考し、再び最適化を行う。
【0213】
この際、差分画像を用いる代わりに、各画像の強度分布のプロファイルを、画像内の複数の軸にて差分を基準として、類似点像を探索しても良い。
【0214】
また、第5の実施の形態同様に、収差同定を用いるのは点像でなくとも、被検査物からの散乱光を用いても良いし、検出器モニタリング時に用いる回折格子からの回折光を用いても良い。
【0215】
以上、本発明者によってなされた発明を実施の形態に基づき具体的に説明したが、本発明は前記の実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更が可能であることは言うまでもない。
【産業上の利用可能性】
【0216】
本発明は、半導体製造、磁気ヘッド製造における暗視野欠陥検査装置での適用を想定して説明した。しかし、必ずしもこの用途に拘るものでなく、電子顕微鏡でなければ確認できないような微生物等の検査などの技術分野に適用することも可能である。
【符号の説明】
【0217】
20…対物レンズ、21…空間フィルタ、22…結像レンズ、23…センサ、
24…ハーフミラー、60…モニタリング用チップ、
100…照明光、101…レーザ、102…エキスパンダ、
103…アッテネータ、104…偏光制御素子、105A、105B…ミラー、
106…レンズ、150…照明系モニタリング部、
250…検出系モニタリング部、251…センサ、300…XYステージ、
400…Zステージ、401…被検査物高さ計測部、
500…信号処理部、501…モニタ、
800、800−2、800−3、800−4、800−5…制御部、
801…記録部、802…比較部、803…感度予測部、
804…フィードバック制御部、805…データベース、810…収差同定部。
【技術分野】
【0001】
本発明は、半導体製造や磁気ヘッド製造ラインにて用いられる暗視野欠陥検査装置の装置状態モニタリング機能とモニタリング結果に基づいた装置状態の較正機能、特にモニタリング結果に基づいた装置状態の較正機能並びに異常状態の予測機能を備えた装置およびその予測方法に関する。
【背景技術】
【0002】
暗視野欠陥検査装置とは観察試料による散乱光を観察することにより、高コントラスト・超微細構造の観察を行い、欠陥検査を行うことを目的とした検査装置のことである。
【0003】
半導体製造装置では、EES(Equipment Engineering System)と呼ばれる装置の安定化、装置間の性能差低減、突発的故障の予知を目的とした取り組みが行われている。EESでは、プロセス中のあらゆるデータを大量に収集・保存し、処理することで、上記目的を達成することを目指している。
【0004】
半導体製造や磁気ヘッド製造ラインにおいては、検査対象物の微細化に伴い、検出すべき欠陥信号の微弱化が進んでいる。特に暗視野欠陥検査装置においては、欠陥検出のために散乱光を用いており、微弱光の安定検出に対する要求は強い。微弱光を安定検出するには、装置状態を高い水準で一定に保つことが求められる。
【0005】
特開2007−273513号公報(特許文献1)には、暗視検査装置に搭載されている空間フィルタの自動較正技術が開示されている。これは、被検ウェハ上の周期パターンからの回折光を瞳上で観察し、透過光量が最小となるように空間フィルタを自動的に設置するものである。
【0006】
また、特開2007−248086号公報(特許文献2)には、検査装置内の温度、気圧の変化による結像レンズの結像位置変化を補正する機構を備えた装置について記述がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−273513号公報
【特許文献2】特開2007−248086号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、上記各文献の半導体検査装置においても装置全体の管理ではなく、一部の機能を管理し補正するにとどまっている。製造ラインには複数台の検査装置が配置されることが多く、装置間の検出感度を一致させることも重要な課題となっている。さらに、製造ラインの安定運用のため、検査装置の故障予知も求められる。
【0009】
本発明の目的は、照明光学系と検出光学系、温度・気圧と言った環境をモニタリングする情報収集機能、モニタリング結果と設計値、理論計算値もしくはシミュレーション結果により導出した理想値を比較しモニタリング結果と理想値を近づけるように装置を較正するフィードバック機能を有する装置状態管理機能、を含むことで、装置状態及び装置感度を一定に保つ手段を提供することにある。
【0010】
本発明の前記並びにその他の目的と新規な特徴は、本明細書の記述及び添付図面から明らかになるであろう。
【課題を解決するための手段】
【0011】
本願において開示される発明のうち、代表的なものの概要を簡単に説明すれば、次の通りである。
【0012】
本発明の代表的な実施の形態に関わる暗視野欠陥検査方法は、被検査物の表面を照明する照明光により被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、この第1のセンサが取得した信号に基づき被検査物上の異物や欠陥を検出するものであって、照明光の強度分布と偏光状態分布いずれか又は双方を計測する照明光モニタリングステップと、検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び被検査物を載置するステージ動作状態を検出する検出系モニタリングステップと、これらの照明光モニタリングステップと検出系モニタリングステップの検出結果と理想値とを比較し、それぞれの検出結果と理想値との差分が許容値以下となるよう照明光と検出系のいずれか又は双方を調整するフィードバック制御ステップと、を含むことを特徴とする。
【0013】
この暗視野欠陥検査方法において、照明光モニタリングステップは正反射光を利用して照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴としても良い。
【0014】
この暗視野欠陥検査方法において、照明光モニタリングステップは被検査物の検査面となるステージ上で照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴としても良い。
【0015】
この暗視野欠陥検査方法において、さきの照明光はレーザを光源とした照明系によって生成され、照明光モニタリングステップにて照明光生成過程の光線の計測結果から検査面上での照明光の強度分布と偏光状態分布のいずれか又は双方を推定することを特徴としても良い。
【0016】
この暗視野欠陥検査方法において、検出系モニタリングステップは被検査物の検査面となるステージ上に置かれた特性が既知の反射型光学素子にスポット光を斜方照明し得られた散乱光を第2のセンサにより検出することを特徴としても良い。
【0017】
この暗視野欠陥検査方法において、照明光モニタリングステップ及び検出系モニタリングステップの検出結果の経時変化を記録し、統計処理により装置の異常を判断する装置異常確認ステップを更に含むことを特徴としても良い。
【0018】
この暗視野欠陥検査方法において、更に、照明光モニタリングステップ及び検出系モニタリングステップの検出結果と理想値を同時に表示する検出結果出力ステップと、を含むことを特徴としても良い。
【0019】
本発明の代表的な実施の形態に関わる別の暗視野欠陥検査方法は、被検査物の表面を照明する照明光により被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、第1のセンサが取得した信号に基づき被検査物上の異物や欠陥を検出するものであって、照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリングステップと、検出系に入力された散乱光を第2のセンサにより検出する検出系モニタリングステップと、照明光モニタリングステップ及び検出系モニタリングステップ実行時の温度及び気圧の双方またはいずれか一方を測定する環境測定ステップと、照明光モニタリングステップ、検出系モニタリングステップ及び環境測定ステップの検出結果と理想値とを比較し、それぞれの検出結果と理想値との差分が許容値以下となるよう照明光と検出系のいずれか又は双方を調整するフィードバック制御ステップと、を含むことを特徴とする。
【0020】
この暗視野欠陥検査方法において、更に、照明光モニタリングステップ及び検出系モニタリングステップの検出結果と理想値を表示する検出結果出力ステップと、を含むことを特徴としても良い。
【0021】
本発明の代表的な実施の形態に関わる暗視野欠陥検査装置は、照明光を出力する照明系と、被検査物に照射された照明光の散乱光を検出する検出系と、制御部と、を有し、被検査物の表面を照明する照明光により被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、取得した信号に基づき被検査物上の異物や欠陥を検出するものであって、照明系は照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段を有し、検出系は検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び被検査物を載置するステージ動作状態を検出する検出系モニタリング手段を有し、制御部は照明光モニタリング手段と検出系モニタリング手段の検出結果と理想値とを比較し、それぞれの検出結果と理想値との差分が許容値以下となるよう照明光と検出系のいずれか又は双方を調整することを特徴とする。
【0022】
この暗視野欠陥検査装置において、照明光モニタリング手段は正反射光を利用して照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴としても良い。
【0023】
この暗視野欠陥検査装置において、照明光モニタリング手段は被検査物の検査面となるステージ上で照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴としても良い。
【0024】
この暗視野欠陥検査装置において、照明光は照明系内部のレーザを光源とし、照明光モニタリング手段は照明光生成過程の光線の計測結果から検査面上での照明光の強度分布と偏光状態分布のいずれか又は双方を推定することを特徴としても良い。
【0025】
この暗視野欠陥検査装置において、検出系モニタリング手段は被検査物の検査面となるステージ上に置かれた特性が既知の反射型光学素子にスポット光を斜方照明し得られた散乱光を第2のセンサにより検出することを特徴としても良い。
【0026】
この暗視野欠陥検査装置において、検出系モニタリング手段は被検査物の検査面となるステージ上に置かれた点光源と特性が既知の透過型光学素子を用いることで得られる所定の光を第2のセンサにより検出することを特徴としても良い。
【0027】
この暗視野欠陥検査装置において、照明光モニタリング手段及び検出系モニタリング手段の検出結果の経時変化を記録し、統計処理により装置の異常を判断する装置異常確認手段を更に含むことを特徴としても良い。
【0028】
この暗視野欠陥検査装置において、更に、照明光モニタリング手段及び検出系モニタリング手段の検出結果と理想値を同時に表示する検出結果出力手段と、を含むことを特徴としても良い。
【0029】
本発明の代表的な実施の形態に関わる別の暗視野欠陥検査装置は、照明光を出力する照明系と、被検査物に照射された照明光の散乱光を検出する検出系と、制御部と、を有し、被検査物の表面を照明する照明光により被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、取得した信号に基づき被検査物上の異物や欠陥を検出するものであって、照明系は照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段を有し、検出系は検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び被検査物を載置するステージ動作状態を検出する検出系モニタリング手段を有し、制御部は照明光モニタリング手段と検出系モニタリング手段の検出結果と理想値とを比較する比較部と、照明光モニタリング手段及び検出系モニタリング手段実行時の温度及び気圧の双方またはいずれか一方を測定する環境測定手段と、照明光モニタリング手段、検出系モニタリング手段及び環境測定手段の検出結果と予め算出しておいた理想値とを比較し、それぞれの検出結果と理想値との差分が許容値以下となるよう照明光と検出系のいずれか又は双方を調整するフィードバック手段と、を有することを特徴とする。
【0030】
この暗視野欠陥検査装置において、更に、照明光モニタリング手段、検出系モニタリング手段及び環境測定手段の検出結果とそれぞれの理想値を表示する検出結果出力手段と、を含むことを特徴としても良い。
【発明の効果】
【0031】
本願において開示される発明のうち、代表的なものによって得られる効果を簡単に説明すれば以下の通りである。
【0032】
本発明の代表的な実施の形態に関わる暗視野欠陥検査装置の較正方法により、暗視野欠陥検査装置の装置性能が安定化する。また、装置間にて同一の調整仕様を用いることで装置間感度差が低減される。また、装置故障の予兆を検知することで、装置稼働率が向上する。
【図面の簡単な説明】
【0033】
【図1】一般的な暗視野欠陥検査装置の構成を表す図である。
【図2】本発明の第1の実施の形態に関わる暗視野欠陥検査装置の構成を表す図である。
【図3】本発明の第1の実施の形態に関わる制御部の内部構成を示すブロック図である。
【図4】本発明の第1の実施の形態に関わる暗視野欠陥検査装置におけるモニタリング処理手順を表すフローチャートである。
【図5】照明系モニタリング部によるモニタリング処理の概念を表す概念図である。
【図6】照明系と検出系のモニタリングに使用するモニタリング用チップを表す図である。
【図7】装置較正手順の一例を示す概念図である。
【図8】閾値による装置パラメータの較正処理に関するグラフである。
【図9】本発明の第1の実施の形態に関わる複数台の暗視野欠陥検査装置の性能均一化の処理手順を表すフローチャートである。
【図10】暗視野欠陥検査装置の予測感度μの挙動により、どのような障害が考えられるかを表す概念図である。
【図11】本発明の第1の実施の形態での警告を伝える画面である。
【図12】本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の構成を表す図である。
【図13】点光源発生部の構成を表す図である。
【図14】本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の構成を表す図である。
【図15】本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の照明系モニタリングの構成を表す図である。
【図16】本発明の第2の実施の形態に関わる制御部の内部構成を示すブロック図である。
【図17】本発明の第2の実施の形態に関わる制御部によるモニタリング及び較正の処理手順を表すフローチャートである。
【図18】本発明の第3の実施の形態に関わる制御部の内部構成を示すブロック図である。
【図19】本発明の第3の実施の形態に関わる制御部によるモニタリングの処理手順を表すフローチャートである。
【図20】装置較正の処理手順を表すフローチャートである。
【図21】本発明の第4の実施の形態に関わる制御部の内部構成を示すブロック図である。
【図22】本発明の第4の実施の形態に関わる暗視野欠陥検査装置におけるモニタリング処理手順を表すフローチャートである。
【図23】本発明の第5の実施の形態に関わる制御部800−5の内部構成を表すブロック図である。
【図24】本発明の第5の実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。
【図25】本発明の第6の実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。
【図26】本発明の第7の実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。
【発明を実施するための形態】
【0034】
(従来の実施の形態)
図1は一般的な暗視野欠陥検査装置の構成を表す図である。暗視野欠陥検査装置の事項について、この図を用いて説明する。
【0035】
一般的な暗視野欠陥検査装置は、対物レンズ20、空間フィルタ21、結像レンズ22、センサ23、レーザ101、エキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105A、105B、レンズ106、XYステージ300、Zステージ400、被検査物高さ計測部401、信号処理部500、モニタ501を含んで構成される。
【0036】
対物レンズ20は照明光100の照射により被検査物上の異物、欠陥、パターンから散乱、回折された光を、被検査物1の法線方向に垂直な方向(上方)から集光する対物レンズである。
【0037】
被検査物1は、この暗視野欠陥検査装置により検査される半導体装置などである。被検査物1はXYステージ300上に載置される。
【0038】
対物レンズ20は被検査物1からの散乱光を集光するためのレンズである。
【0039】
被検査物1に形成されたパターンが繰り返し形状の場合、該繰り返しパターンから発生する回折光は、対物レンズ20の射出瞳に規則的な間隔で集光する。空間フィルタ21は瞳面上でこの繰り返しパターンの遮光を行うフィルタである。
【0040】
結像レンズ22は、繰り返しパターン以外(たとえば障害発生箇所)からの散乱光、回折光であって空間フィルタ21を通過したものをセンサ23上に結像するためのレンズである。
【0041】
センサ23は結像レンズ22によって集光結像された像を電子情報として信号処理部500に送るための光センサである。光センサの種別としてはCCDやCMOSなどが一般的ではあるが、ここではその種別は問わない。
【0042】
以下、対物レンズ20、空間フィルタ21、結像レンズ22、センサ23を総称して「検出系」と呼ぶ。
【0043】
レーザ101は、被検査物1上に所望のビームを形成するための照明光100を照射する。この照明光100により被検査物の法線方向に対して角度を有す方向から被検査物1の表面を照明し、被検査物1上に所望のビームを形成する。
【0044】
エキスパンダ102は、照明光100を一定の倍率の平行光束に広げるレーザビームエキスパンダーのことである。
【0045】
アッテネータ103は、エキスパンダ102通過後の照明光100の光量・強度を制御するための減衰器である。
【0046】
偏光制御素子104は、偏光板や波長板の回転、もしくは電圧のON・OFF制御によって液晶の分子の向きを変え、素子に入射する光の偏光方向を切り替え、偏光状態を制御する素子のことである。
【0047】
ミラー105A、105Bは偏光制御(電場の位相と振幅制御)後の照明光100を被検査物1に照射する際に、照射角度の調整を行うための反射鏡群である。
【0048】
レンズ106は、被検査物1に照射する直前に照射箇所に照明光100を収束させるためのレンズである。
【0049】
以下、これらのレーザ101、エキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105A、105Bを総括して「照明系」と呼ぶ。
【0050】
XYステージ300は被検査物1を載置するためのステージである。XYステージ300を平面方向に移動することで、被検査物1を走査する。
【0051】
Zステージ400は、XYステージ300の検査基準面(被検査物1を載置する面)を垂直方向(Z方向)に移動させるためのステージである。
【0052】
被検査物高さ計測部401は、このXYステージ300の検査基準面、及び被検査物1の高さを測定するための計測器である。Zステージ400と被検査物高さ計測部401によって、焦点位置合わせを自動で行う、オートフォーカス機能を提供する。
【0053】
信号処理部500は、センサ23より受け取った画像データをモニタ501で表示可能な状態に変換するための回路である。
【0054】
次に全体の動作について説明する。
【0055】
まず、レーザ101からの照明光100により、被検査物の法線方向に対して角度を有す方向から被検査物1の表面を照明し、被検査物1上に所望のビームを形成する。
【0056】
該ビームにより被検査物上の異物、欠陥、パターンから散乱、回折された光は、被検査物の法線方向に垂直な方向(上方)から、対物レンズ20により集光される。
【0057】
被検査物1に形成されたパターンが繰り返し形状の場合、該繰り返しパターンから発生する回折光は、対物レンズの射出瞳に規則的な間隔で集光するため、瞳面上に置かれた空間フィルタ21により遮光される。
【0058】
一方、繰り返しパターン以外からの散乱光、回折光は空間フィルタ21を通過し、結像レンズ22へと導かれ、センサ23上に結像される。
【0059】
被検査物1はXYステージ300上に載置され、このXYステージ300により走査することにより、被検査物1からの散乱光の2次元画像を得る。このとき、被検査物1と対物レンズ20との距離は被検査物高さ計測部401により測定されZステージ400により調整される。
【0060】
センサ23により取得された2次元画像は、信号処理部500にて異物種、欠陥種ごとに分類され、異物や欠陥の大きさが求められ、その結果がモニタ501に表示される。
【0061】
上記の暗視野欠陥検査装置の構成においては、装置状態をモニタリングする専用の機能はなく、較正用ウェハからの散乱光を用いて装置較正を行う。しかしながら、装置構成が複雑であり、調整箇所も多いなか、数学的記述が困難な散乱現象を用いて、装置較正を行うのは、非常に困難である。
【0062】
(第1の実施の形態)
上記の従来の実施の形態と対比する形で、本発明の第1の実施の形態について説明する。
【0063】
図2は本発明の第1の実施の形態に関わる暗視野欠陥検査装置の構成を表す図である。本実施の形態に関わる暗視野欠陥検査装置では、図1の暗視野欠陥検査装置の構成に加え、照明系モニタリング部150と、検出系モニタリング部250及び制御部800と、を有する。なお、図1で記載された事項については本図においても同一の処理である。個々の構成部材の説明、全体の動作については省略する。
【0064】
照明系モニタリング部150とは、照明光の状態を計測するセンサ回路である。暗視野欠陥検査装置においては、照明光を被検査物に当て、その散乱光を検出する。この際、照明光の強度分布と偏光状態分布に被検査物より生じる散乱光が依存している。そのため、照明光状態をモニタリングする必要がある。照明系モニタリング部150は、光の偏光状態および強度の空間2次元分布を計測する2次元偏光計測機能を持つ。2次元偏光計測機能は、偏光板や波長板などの偏光素子と検出器から構成され、照明光の正反射光である被測定光の所望の偏光成分を偏光素子により抽出し、その抽出した偏光成分を検出器にて検出した信号から被測定光の強度分布および偏光状態分布を決定する。
【0065】
検出系モニタリング部250とは、検出系の状態を計測するセンサ回路である。検出系モニタリング部250にはハーフミラー24とセンサ251が含まれる。
【0066】
制御部800は、照明系モニタリング部150と検出系モニタリング部250とで得られた値を比較し、フィードバック制御を行う制御回路である。
【0067】
図3は本発明の第1の実施の形態に関わる制御部800の内部構成を示すブロック図である。
【0068】
制御部800は、記録部801、比較部802、感度予測部803、フィードバック制御部804を含んで構成される。
【0069】
記録部801は、モニタリングした照明系モニタリング部150及び検出系モニタリング部250のデータを記録する回路である。
【0070】
比較部802は、記録部801で記録したデータをデータベース805内の理想値と比較する回路である。比較部802での処理前に、モニタリング時の光源や素子の特性を予め算出しておく。
【0071】
感度予測部803は、記録データと理想値の違いから現在の装置感度を推定・予測する回路である。
【0072】
フィードバック制御部804は、感度予測部803が予測した予測感度に応じて装置の各稼動部にフィードバックをかける回路である。
【0073】
データベース805は、比較部802が用いる理想値のデータベースである。このデータベース805には、理論計算や光学シミュレーションなどによって、理想値を入力しておく。このとき、光学シミュレータでは、被検査物をモデル化し、照明光学系の条件に依存して発生する被検査物からの散乱光強度などを導出し、検査器にて検出される光強度を計算する。このデータベース805の理想値のパラメータとしては、照明光学系の強度分布、偏光状態分布、結像レンズ22の焦点距離、センサ23の感度などの情報を含む。これらのパラメータは事前に特性を把握しておく必要がある。
【0074】
図4は本発明の第1の実施の形態に関わる暗視野欠陥検査装置におけるモニタリング処理手順を表すフローチャートである。
【0075】
まず、照明系モニタリング部150が照明系の状態をモニタリングする(ステップS10)。また、検出系モニタリング部250が検出系の状態を計測する(ステップS11)。ステップS10及びステップS11で得られた計測結果は比較部802に送られる。これらの計測結果を、比較部802はデータベース805内の理想値と比較し、更に理想値と計測結果との「ずれ」から検出感度を予測する(ステップS12)。そして予測した検出感度が任意に設定した閾値と大小判定を行う(ステップS13)。
【0076】
予測感度が閾値以下の場合には、光学系の較正を行う(ステップS14)。ここで要較正箇所が全て自動制御できるなら、全ての較正作業を自動で行えるようにしてもよい。このとき較正箇所は予め理論計算もしくは光学系シミュレーションにて決定しておく。
【0077】
一方、予測感度が閾値以上の場合には、照明系及び検出系の検査を開始する(ステップS15)。
【0078】
これらの処理を行った後、再びステップS10に戻る。
【0079】
以下、照明系モニタリング部150のモニタリング処理を詳細に説明する。図5は照明系モニタリング部150によるモニタリング処理の概念を表す概念図である。
【0080】
まず、被検査物1に対する照射に先立ち、照明光100をXYステージ300上に載置された参照ミラー61に照射する。参照ミラー61は検査対象である被検査物1上に存在すると想定される異物、被検査物1の欠陥に比べ表面の凹凸が少ない反射鏡である。この参照ミラー61の大きさは、照明光の広がり以上である。
【0081】
参照ミラー61に照射し、反射した正反射光600の二次元偏光状態分布(強度分布)を照明系モニタリング部150にて計測する。参照ミラー61の材質及び照明仰角が既知であるものを用いることで、反射による振幅と位相の変化を与えるフレネル係数を制御部800ないしは照明系モニタリング部150が計算し、正反射光600の強度分布と偏光状態分布から照明光100の強度分布と偏光状態分布を算出する。
【0082】
上記のように計測と理論計算を用いて、照明光の二次元偏光分布(強度分布を含む)をモニタリングすることで後述する予測感度μを高精度に求めることが可能となる。
【0083】
照明光100の強度分布を較正するには照明系である、レーザ101、エキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105A、105Bなどを調整し、偏光分布を較正するには偏光制御素子104などを調整する。
【0084】
以上のように、照明系のモニタリングを行う際、正反射光600を用いて較正に用いるパラメータを取得する。
【0085】
次に、検出系モニタリング部250のモニタリング処理を詳細に説明する。検出系モニタリング部250では点光源や任意の回折光がいかに検出されるかをハーフミラー24とセンサ251で計測し、状態を把握する。
【0086】
はじめに点光源による検出系のモニタリングについて説明する。
【0087】
点光源から出射される光を検出系に導入し、対物レンズ20と結像レンズ22にてセンサ23上に結像した点光源の像を観察することで、レンズの結像特性である分解能、レンズ透過後による波面収差の変化などをモニタリングする。また、ステージ高さを上下させながら点像を測定することで、Zステージ400が適切に働いているかを確認できる。さらに、XYステージ300を移動させながら、任意の位置にてZステージ400を上下させる。この状態で被検査物高さ計測部401の信号を検出することで、XYステージ300の移動による高さ方向の変動を計測できる。レンズとXYステージ300とZステージ400の調整後、点像をセンサ23に入射し、ゲインを較正する。
【0088】
ここで点光源は、拡散板上でスポットとなるよう光束を集光することで、拡散板上から点光源を得て使用する。ここで利用する拡散板は散乱光量の仰角、方位依存性が小さい(理想的にはゼロ)ことが望ましい。なお、本実施の形態では拡散板を利用しているが、拡散板の代わりに波長に比べ直径の小さい微小球体を用いて、これに照明光を照射することで得てもよい。
【0089】
次に、回折光を用いた検出系のモニタリングについて説明する。
【0090】
特定の方向に回折する回折光は、拡散板や微小球体の代わりに任意の回折格子により生成する。射出瞳上では、回折光の方向に依存した方向に点像が規則的に配列する。この点像の規則的な配列を遮光するよう空間フィルタの駆動部と実際の移動距離をモニタリングし較正することで、被検査物の持つ特定の周期構造を精密に除去する。
【0091】
回折格子に関しては、複数の異なる方向、周期の溝があるものを用意することで、より詳細に空間フィルタの動作をモニタリングする。
【0092】
点光源生成のための拡散板、回折光生成のための回折格子共にXYステージ300上に設置し、被検査物の載置前もしくは後にモニタリング用素子として利用する。
【0093】
図6は照明系と検出系のモニタリングに使用するモニタリング用チップ60を表す図である。
【0094】
このモニタリング用チップ60には、照明系モニタリングで用いる参照ミラー61、検出系モニタリングの点光源生成で用いる拡散板62、検出系モニタリングの回折光生成で用いられる回折格子63A、63Bが含まれる。これらを一つにまとめることで、ステージ移動量が減少し、効率的に装置のモニタリングを実施することができる。
【0095】
次に、装置状態のモニタリング結果を利用した装置感度予測と装置較正について説明する。
【0096】
検査装置の検査感度は、半導体ウェハ上の検出可能な異物や欠陥の大きさ、もしくは異物や欠陥からの散乱光強度そのものを指す。装置状態が理想からずれていると、検査感度は低下する。そこで、モニタリングした装置状態を表す物理量と、その物理量の理想状態との差から検査感度を表す指標を算出し、検査感度を一定以上に保つように装置較正を行う。
【0097】
ここで「装置状態を表す物理量」とは、照明光学系の強度分布、偏光状態分布、検出レンズ焦点距離、検出感度などを示す。また各物理量のモニタリングは、被検査物計測の合間または常時行う。
【0098】
このときモニタリングする物理量の理想値は、設計値、理論計算値、光学シミュレーションから算出した値の全て若しくはいずれかを用いる。
【0099】
図7は、装置較正手順の一例を示す概念図である。
【0100】
照明系と検出系のモニタリングした物理量をFiとし、これを比較部802に送信する(ステップS50)。物理量Fiと理想値Giの差の二乗をAiで重み付けした
Ei=Ai(Fi−Gi)2 …(式1)
により、理想値データベースと比較を行う(ステップS51)。
【0101】
全てのモニタリング値の理想からのずれを
E=ΣEi …(式2)
と表す。(式2)で求めたEにより表される感度に関する指標、
μ=1/(1−E) …(式3)
を用いて感度予測部803は感度を予測する(ステップS52)。
【0102】
この指標をモニタ501を経由して外部出力することで、操作者が視覚的に装置状態を判断する目安にすることも可能である(ステップS53)。また、μについて所定の閾値を設定しておき、μが閾値以下になったときに装置パラメータを較正する処置をとってもよい(ステップS54)。
【0103】
図8は閾値による装置パラメータの較正処理に関するグラフである。この図では閾値83を基準とする。ここで閾値83は装置性能に関するパラメータであり、安定検査など装置の使用目的によりその値が決定される。高感度検査マイクロの値が閾値83以下となると、μの値が1に近づくように較正を行う。較正後は再度モニタリングを実施、較正の効果の有効性を確認する。
【0104】
この感度予測部803により予測された感度(予測感度)μは、装置間の性能均一化に用いることができる。すなわち、検出感度を表す全ての指標において、複数台の暗視野欠陥検査装置の性能を完全に一致させることは現実的でない。そこで、予測感度の統計値を目標値として性能の均一化を図る。図9は本実施の形態における複数台の暗視野欠陥検査装置の性能均一化の処理手順を表すフローチャートである。
【0105】
まず、複数台の暗視野欠陥検査装置それぞれについて予測感度μを導出する(ステップS1020)。複数台の暗視野欠陥検査装置それぞれの予測感度μから統計量μ´を感度の目安とする(ステップS1021)。そして、各装置のμがμ´となるように、各装置のフィードバック制御部804が装置較正を施す(ステップS1022)。
【0106】
また、照明光や検出系などの装置較正に関するパラメータのほか、装置内の環境を表すパラメータである温度、気圧、湿度のパラメータも同時にモニタリングする。一般に光学素子の特性は、使用環境により変動する。たとえば、レンズを構成するガラスの屈折率は温度依存性を持ち、レンズ周辺の温度によって焦点距離、波面収差などが変動する。従って、光学素子調整の際には、上記の装置環境に関するパラメータを考慮する必要がある。
【0107】
全てのもしくは一部のモニタリングした物理量、予測感度μの経時変化、被検査物の測定時間を記録し、装置の状態把握と故障の予知に活用する。なお、各物理量のモニタリングは、被検査物計測の合間、常時、1週間に一回など定期的に、もしくは装置の電源投入時に行う。
【0108】
図10は暗視野欠陥検査装置の予測感度μの挙動により、どのような障害が考えられるかを表す概念図である。
【0109】
たとえば図10(a)のように、較正を繰り返してもモニタリング値がすぐに低下する場合、または同図(b)のように、較正してもモニタリング値が改善しない場合などは、装置自体に何らかの問題を含んでいると想定される。従って、操作者(もしくは装置管理者)は部品交換等の必要性を感じ取ることができる。また、図10(c)のように時間的に周期的にモニタリング値が変化する場合、装置内外のいずれかにモニタリング値の変動要因があると考えられる。
【0110】
予測感度μが短期間に所定の回数閾値以下になった場合にはモニタ501に警告を出してもよい。図11は本実施の形態での警告を伝える画面である。
【0111】
このように個々の暗視野欠陥検査装置それぞれについて予測感度μを導出し較正を行うだけでなく、複数の暗視野欠陥検査装置の予測感度μから統計量μ´を求め、統計量μ´に近づくように個々の暗視野欠陥検査装置の較正を行うことで、装置間感度差の軽減を図ることが可能となる。
【0112】
また統計量μ´の代わりに、光学シミュレーションにより導出した装置状態を表す物理量を導出し、その物理量より推定した検出感度を装置較正の目安として用いても良い。
【0113】
以下、本実施の形態の変形例を述べる。
【0114】
図12は本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の構成を表す図である。この図の暗視野欠陥検査装置の構成では、検出系のモニタリングに用いる点光源発生部155をXYステージ300側部に有する。この点光源発生部155を用いて検出系のモニタリングを行う点が図2の暗視野欠陥検査装置と相違する。
【0115】
図13はこの点光源発生部155の構成を表す図である。
【0116】
点光源発生部155には光源70と透過型空間フィルタ71を含む。この光源70の出力する光を、透過型空間フィルタ71を介して検出系に入射する。
【0117】
また図14は本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の構成を表す図である。この図の暗視野欠陥検査装置では、XYステージ300上において直接、照明光の2次元偏光分布を計測している。すなわち、XYステージ300側部に照明系モニタリング部150を有し、これを用いて測定の合間に照明光の2次元偏光分布をモニタリングする。正反射光600を用いる手法と比べ、より正確に照明光の状態をモニタリングすることができる。なお、このような場合、モニタリング用チップ60には検出系モニタリングの点光源生成で用いる拡散板62、検出系モニタリングの回折光生成で用いられる回折格子63A、63Bがあればよく、参照ミラー61は不要となる。
【0118】
図15は本発明の第1の実施の形態に関わる別の暗視野欠陥検査装置の照明系モニタリングの構成を表す図である。本図の照明系モニタリングにおいては、照明系が被検査面に到達する前に、高度分布と偏光状態分布をモニタリングし、検査面での状態を理論計算にて導く。照明系の途中にて、ハーフミラー107などを用いて一方を照明光100とし、他方をモニタリング用の光として照明系モニタリング部151にて検出する。
【0119】
光学素子群108と109は、それぞれエキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105、レンズ106のいずれかからなる。
【0120】
照明系モニタリング部151では、2次元の偏光状態分布を計測し、ハーフミラー107透過後の素子である偏光素子やミラー等の光学特性より、被検査面での照明光100の状態を算出する。ここで、光の偏光状態(強度分布を含む)は、1×4のベクトルを用いて表示することができ、これをストークスベクトルという。また、光学素子はストークスベクトルを結ぶ4×4の行列として記述することができ、これをミューラー行列という。制御部800または照明系モニタリング部151は、このストークスベクトル、ミューラー行列を用いて照明光の偏光状態を計算する。
【0121】
この形態の最も大きなメリットは、光路中にて光を分岐し検出しているため、リアルタイムのモニタリングが可能な点である。なお、本図の暗視野欠陥検査装置においても、モニタリング用チップ60には参照ミラー61は必要ない。
【0122】
(第2の実施の形態)
次に本発明の第2の実施の形態について説明する。
【0123】
この第2の実施の形態の構成は図2に表す暗視野欠陥検査装置の構成と同じである。第1の実施の形態との相違点は、制御部800での処理である。
【0124】
本実施の形態において制御部800は、照明光100の強度・偏光状態をモニタリングする照明系モニタリング部150、検出系の結像性能、空間フィルタ21の駆動情報、XYステージ300、Zステージ400と、被検査物高さ計測部401からなるオートフォーカス等のモニタリングを行う検出系モニタリング部250を制御する。
【0125】
図16は、本実施の形態に関わる制御部800−2の内部構成を示すブロック図である。
【0126】
この制御部800−2は記録部801、比較部802、フィードバック制御部804を含む。
【0127】
記録部801はモニタリングしたデータを記録する回路である。
【0128】
比較部802は記録部801が記録した記録データを予め理論計算や光学シミュレーションなどにより算出しておいた装置状態とモニタリング結果を対応付けるデータベース805と比較する回路である。
【0129】
フィードバック制御部804は、実測値との差が小さくなるデータベース805の値を求め、そのデータベースの値を計算したときに仮定した装置状態を実際の装置の状態とし、理想の装置状態となるよう装置の各部にフィードバック制御をかける回路である。
【0130】
すなわち、第1の実施の形態では、現実の測定結果と理想値を対比し、装置の現状を推定・予測する感度予測部803が存在したが、本実施の形態ではそのような推定は行わない点が相違する。
【0131】
図17は、この制御部800−2によるモニタリング及び較正の処理手順を表すフローチャートである。
【0132】
まず、照明系モニタリング部150が照明系のモニタリングを行う(ステップS1030)。また検出系モニタリング部250が検出系の状態をモニタリングする(ステップS1031)。ステップS1030及びステップS1031のモニタリング結果は、比較部802に送られる。比較部802はデータベース805と対比して、現在の暗視野欠陥検査装置の装置状態を決定する(ステップS1032)。比較部802はデータベース805と対比して求めた装置状態と任意に設定した装置基準を比較する(ステップS1033)。
【0133】
基準以下の場合には、光学系の調整を行い(ステップS1034)、その後再び照明系のモニタリング(ステップS1030)に戻る。このとき、較正箇所は、あらかじめ理論計算もしくは光学シミュレーションにて決定しておく。このとき、光学シミュレータでは、被検査物をモデル化し、照明光学系の条件に依存して発生する被検査物からの散乱光強度などを導出し、検査器にて検出される光強度を計算した結果を用いて、構成箇所を決定してもよい。
【0134】
一方、基準以上であれば、操作者に警報等を出すなどにより暗視野欠陥検査装置の検査を行う(ステップS1035)。
【0135】
(第3の実施の形態)
次に本発明の第3の実施の形態について説明する。
【0136】
本発明に関わる暗視野欠陥検査装置は、被検査物1の表面を照明光100により被検査物1の法線方向に対して角度を有する方向から照明し、被検査物1上に所望のビームを形成する。該ビームにより被検査物1上の異物、欠陥、パターンから散乱、回折された光は、被検査物1の法線方向に垂直な方向(上方)から対物レンズ20により集光される。
【0137】
被検査物1に形成されたパターンが繰り返し形状の場合、該繰り返しパターンから発生する回折光は、対物レンズ20の射出瞳に規則的な間隔で集光するため、瞳面上に置かれた空間フィルタ21により遮光される。一方、繰り返しパターン以外からの散乱光、回折光は空間フィルタ21を通過し、結像レンズ22へ導かれる。その後、これらの散乱光、回折光はセンサ23上に結像される。被検査物1はXYステージ300上に載置され、XYステージ300により、X方向、Y方向に走査することにより、該被検査物1の散乱光の二次元画像を得る。このとき、被検査物とレンズとの距離は被検査物高さ計測部401により測定される。この被検査物高さ計測部401により測定された情報は、Zステージ400により調整される。センサ23により取得された二次元画像を元に、信号処理部500にて異物と欠陥の有無が判定される。このとき、信号処理部500にて異物種と欠陥種ごとに分類し、大きさを求め、その結果をモニタ501に表示する。
【0138】
照明光100が複数の光学素子、レーザ101、エキスパンダ102、アッテネータ103、偏光制御素子104、ミラー105A、105B、レンズ106による「照明系」によって生成されるのは第1の実施の形態と同様である。また、照明光100の強度、偏光状態をモニタリングするための照明系モニタリング部150、検出系モニタリング部250、検出系のモニタリング用光源を生成するモニタリング用チップ60を制御する制御部800−3を有する点も同じである。
【0139】
図18は本発明の第3の実施の形態に関わる制御部800−3の内部構成を示すブロック図である。この制御部800−3は記録部801、比較部802、感度予測部803を含んで構成される。
【0140】
記録部801は、モニタリングしたデータを記録する回路である。
【0141】
比較部802は、記録部801が記録した記録データと理想値のデータベース805とを比較する回路である。
【0142】
感度予測部803は、記録データと理想値との違いから装置感度を予測する回路である。
【0143】
データベース805は予めモニタリング時の光源や素子の特性を算出しておき、それらを用いて理論計算や光学シミュレーションなどによって作成された理論値のデータベースである。このとき、光学シミュレータでは、被検査物をモデル化し、照明光学系の条件に依存して発生する被検査物からの散乱光強度などを導出し、検査器にて検出される光強度を計算した結果をデータベースとして用いても良い。
【0144】
すなわち第1の実施の形態及び第2の実施の形態と相違し、本実施の形態では、フィードバック制御部804が存在しない。これにより、装置に対する自動補正を行わない環境では、軽量な回路構成を実現することが可能となる。
【0145】
図19は本発明の第3の実施の形態に関わる制御部800−3によるモニタリングの処理手順を表すフローチャートである。
【0146】
まず照明系モニタリング部150が照明系の状態をモニタリングする(ステップS1060)。また、検出系モニタリング部が検出系の状態を計測する(ステップS1061)。これらの検出値は比較部802に送信される。
【0147】
比較部802は、これらの計測結果を収集し、データベース805の理論値と比較する。そして、データベース805の理想値とモニタリング値のずれから検出感度を予測する(ステップS1062)。
【0148】
なお、照明系モニタリング部150のモニタリング処理、検出系モニタリング部250のモニタリング処理は第1の実施の形態のそれと同じなので省略する。図5及び図6、それらの説明を確認されたい。
【0149】
次に、装置状態のモニタリング結果を利用した装置感度予測について説明する。検査装置の検査感度は、半導体ウェハ(被検査物1)上の検出可能な異物・欠陥の大きさ、もしくは異物や欠陥からの散乱光強度そのものを指す。装置状態が理想的な条件からずれていると、検査感度は低下する。そこで、モニタリングした装置状態を表す物理量と、その物理量の理想状態との差から検査感度を表す指標を算出し、検査感度を一定以上に保つよう装置較正を行う。
【0150】
ここで、装置状態を表す物理量とは、照明系の強度分布、偏光状態分布、検出レンズ焦点距離、検出器感度などを示す。また、各物理量のモニタリングは被検査物1の計測の合間または常時行う。このとき、モニタリングする物理量の理想値は設計値、理論計算で求めた値、光学シミュレーションから算出した値の全てもしくはいずれかを用いる。また、照明系、検出系等のパラメータのほか、装置内の環境を表すパラメータである温度、気圧、湿度のパラメータも同時にモニタリングする。一般的に、光学素子の特性は、使用環境により変動する。たとえば、レンズを構成するガラスの屈折率は温度依存性を持ち、レンズ周辺の温度によって焦点距離、波面収差などが変動する。従って、光学素子調整の際には、上記の装置環境に関するパラメータを考慮しておく必要がある。
【0151】
図20は装置較正の処理手順を表すフローチャートである。この図を用いて装置較正の処理手順を説明する。
【0152】
まず、照明系及び検出系それぞれの物理量を照明系モニタリング部150及び検出系モニタリング部250より受け取る(ステップS70)。この実際の検出値をFiと定義する。
【0153】
Fiと理想値Giの差を二乗しAiで重み付けした(式1)により、データベース805に格納された各理想値との対比を行う(ステップS71)。全てのモニタリング値の理想からのずれを表す(式2)を用いた(式3)を指標として感度を予測する(ステップS72)。この指標をモニタ501を経由して外部出力することで、操作者が視覚的に装置状態を判断する目安にすることを可能にする(ステップS73)。
【0154】
(第4の実施の形態)
次に本発明の第4の実施の形態について説明する。本実施の形態においても、暗視野欠陥検査装置の構成は図2と同様である。
【0155】
被検査物1の表面を、レーザ101から発光される照明光100により被検査物1の法線方向に対して角度を有する方向から照明し、被検査物1上に所望のビームを形成する。該ビームにより被検査物1上の異物、欠陥、パターンから散乱・回折された光は、被検査物1の法線方向に対して垂直な方向(上方)から、対物レンズ20により集光される。被検査物1に形成されたパターンが繰り返し形状の場合に、該繰り返しパターンから発生する回折光は、対物レンズ20の射出瞳に規則的な間隔で集光されるため、瞳面上に置かれた空間フィルタ21により遮光される。一方、繰り返しパターン以外からの散乱光、回折光は空間フィルタ21を通過し、結像レンズ22へ導かれ、センサ23上に結像する。
【0156】
照明光100が照明系によって生成されるのは、第1の実施の形態同様である。
【0157】
被検査物1はXYステージ300上に載置され、XYステージ300によりX、Y方向(平面方向)に走査される。これにより、センサ23が被検査物1の散乱光の二次元画像を得ることができる。
【0158】
被検査物1と対物レンズ20との距離は被検査物高さ計測部401により測定され、Zステージ400により調整される。この調整により、オートフォーカス機能を実現することが可能である。
【0159】
センサ23が取得した二次元画像を元に、信号処理部500は異物・欠陥の有無を判定する。信号処理部500は異物と欠陥種ごとに分類し、大きさを求め、その結果をモニタ501に表示する。
【0160】
制御部800−4は照明系モニタリング部150、検出系モニタリング部250、モニタリング用の光源を生成するモニタリング用チップ60を制御する。なお、照明系モニタリング部150と検出系モニタリング部250の構成・挙動及びモニタリング用チップ60の構成は第1の実施の形態と同様であるので省略する。
【0161】
図21は本実施の形態の制御部800−4の内部構成を示すブロック図である。第1の実施の形態がフィードバックまで考慮しているのに対し、本実施の形態では、各モニタリング部の検出結果をモニタ501に出力するのみである。従って、制御部800−4には記録部801のみ含まれる。記録部801はモニタ501に各モニタリング部の検出結果を出力するための出力制御回路である。なお、必要があれば、データベース805から各種条件に応じた理想的な値を読み出せるようにしてもよい。
【0162】
図22は本実施の形態に関わる暗視野欠陥検査装置におけるモニタリング処理手順を表すフローチャートである。これを用いて制御部800−4の動作について説明する。
【0163】
まず、照明系モニタリング部150がモニタリング結果を記録部801に送信する(ステップS1080)。また検出系モニタリング部250もモニタリング結果を記録部801に送信する(ステップS1081)。記録部801は必要があればデータベース805から各種条件に応じた理想的な値を読み出し、各モニタリング部の検出結果と合わせてモニタ501に出力する(ステップS1082)。
【0164】
以上の構成を取ることで、モニタリングした値をモニタ501から暗視野欠陥検査装置の操作者に開示することが可能となる。これにより、操作者は適宜暗視野欠陥検査装置の装置状態を確認することができ、結果暗視野欠陥検査装置の調整の契機とすることが可能となる。
【0165】
(第5の実施の形態)
以下、第5の実施の形態について図を用いて説明する。本実施の形態と第1の実施の形態との相違点は、検出レンズの波面収差のモニタリング方法について詳細のものとした点にある。
【0166】
本実施の形態における暗視野欠陥検査装置の構成は第1の実施の形態に関わる図2と同様である。したがって図2を参考にしながら、装置構成を説明する。
【0167】
レーザ101から発光される照明光100により被検査物1の表面を、法線方向に対して角度を有する方向から照明することで、被検査物1上に所望のビームを形成する。
【0168】
該ビームにより被検査物1上の異物、欠陥、パターンから散乱・回折された光は、被検査物1の法線方向に対して垂直な方向(図では上方)から、対物レンズ20により集光される。被検査物1に形成されたパターンが繰り返し形状の場合には、該繰り返しパターンから発生する回折光は対物レンズ20の出射瞳に規則的な間隔で集光される。このため、この回折光は瞳面上に置かれた空間フィルタ21により遮光される。
【0169】
一方、繰り返しパターン以外からの散乱光、回折光は空間フィルタ21を通過し、結像レンズ22に導かれ、センサ23上に結像する。また、空間フィルタ21の位置において、図示しないハーフミラーにて光を分岐し、瞳面を観察する検出器を本実施の形態では備える。
【0170】
照明光100が照明系によって生成されるのは、第1の実施の形態同様である。
【0171】
被検査物1はXYステージ300上に載置される。また被検査物1はXYステージ300によりXY方向(平面方向)に走査される。これにより、センサ23は被検査物1の散乱光の結像画像を得ることができる。
【0172】
被検査物1と対物レンズ20との距離は被検査物高さ計測部401により測定される。そしてこの測定結果によりZステージ400によって、被検査物1と対物レンズ20との距離が調整される。この被検査物1と対物レンズ20との距離の調整により、オートフォーカス機能を実現することが可能となる。
【0173】
センサ23が取得した結像画像を元に、信号処理部500は異物・欠陥の有無を判定する。信号処理部500は、異物と欠陥種毎に分類し、大きさを求め、その結果をモニタ501に表示する。
【0174】
本実施の形態においても、制御部800−5は、照明系モニタリング部150と検出系モニタリング部250とで得られた値を比較し、フィードバック制御を行う制御回路である。図23は本実施の形態に関わる制御部800−5の内部構成を表すブロック図である。
【0175】
本実施の形態に関わる制御部800−5は、記録部801、比較部802、収差同定部810、感度予測部803、フィードバック制御部804を含んで構成される。
【0176】
記録部801は、モニタリングした照明系モニタリング部150及び検出系モニタリング部250のデータを記録する回路である。
【0177】
比較部802は、記録部801で記録したデータをデータベース805内の理想値と比較する回路である。比較部802での処理前に、モニタリング時の光源や素子の特性に依存したモニタリング値を予め算出しておく。
【0178】
収差同定部810は、検出レンズの波面収差を同定するために用いる回路である。
【0179】
感度予測部803は、記録データと理想値の違いから現在の装置感度を推定・予測する回路である。
【0180】
フィードバック制御部804は、感度予測部803が予測した予測感度に応じて装置の各可動部にフィードバックをかける回路である。
【0181】
データベース805は、比較部802が用いる理想値のデータベースである。このデータベース805には、理論計算や光学シミュレーションなどによって求められた理想値を入力しておく。このデータベース805の理想値のパラメータとしては、照明光学系の強度分布、偏光状態分布、結像レンズ22の焦点距離、対物レンズと結像レンズの波面収差により劣化した像、センサ23の感度などの情報を含む。これらをパラメータとし、事前に多くの理論計算を行い、データベースを作成する。
【0182】
以下、照明系のモニタリング、検出系のモニタリングの手法について説明する。ここでは、第1の実施の形態との相違点である検出レンズの結像特性を表す波面収差のモニタリング方法に注力して説明する。なお、光学系の構成は図2と同様である。
【0183】
対物レンズ20と結像レンズ22からなる検出レンズの波面収差の影響により、センサ23に結像される像は広がる。
【0184】
ここで波面収差は、空間2次元の位相分布で表され、この位相分布はゼルニケ(Zernike)多項式にて分解することができる。このゼルニケ多項式の各項が球面収差、コマ収差、非点収差などの、異なる収差成分を示している。ゼルニケ係数とは、このゼルニケ多項式の各項の収差成分の大きさを表す重み付け係数のことを言う。
【0185】
本実施の形態では、装置上にて得られる像と、収差を表すゼルニケ係数をパラメータとして、理論的に算出した収差に依存する像の分布関数とを比較し、検出レンズの収差を表すゼルニケ係数を解析する。
【0186】
このゼルニケ係数の解析時に使用する光としては、被検査対象物からの散乱光を用いても良いし、検出系モニタリング時に用いる回折格子からの回折光、もしくは点光源を用いても良い。いずれの場合も、波面収差による像の変化から、波面収差の大きさを逆算する。なお、以下では点像を用いた場合について述べることとする。
【0187】
図24は本実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。これを用いて検出レンズの収差同定フローを説明する。
【0188】
点光源から出射された光を結像レンズ22へ導き、センサ23上で結像させ、信号処理部500は結像した点像を制御部800−5内の記録部に801に記録する(ステップS2001)。また、予め収差を表すゼルニケ係数をパラメータとして、検出レンズの波面収差が様々な場合の点像を理論的に計算し、データベース805に記録しておく(ステップS2002)。
【0189】
次に、制御部800−5内の比較部802により、ステップS2001で取得した点像とステップS2002にて計算した多数の点像のそれぞれの差分を求め、画像の一部もしくは全体で残留強度を計算する(ステップS2003)。そして、制御部800−5内の収差同定部810にて、差分画像の残留強度が最も低かった点像を類似点像とし、類似点像を計算したときの収差を、結像レンズ収差と同定する(ステップS2004)。
【0190】
また差分画像を用いる代わりに、各画像の強度分布のプロファイルを、画像内の複数の軸にて差分を基準として、類似点像を探索しても良い。
【0191】
ここで、点光源は、拡散板上でスポットとなるように光束を集光することで、拡散板上から点光源を得て使用する。この際利用する拡散板は散乱光量の仰角、方位への依存性が小さいこと(理想的には0)であることが望ましい。なお、本実施の形態では拡散板を使用する旨記したが、拡散板の代わりに波長に比べ直径の小さい微小球体を用いて、照明光をこれに照射することで得ても良い。また、XYステージ300の端に点光源そのものを設置してもよい。
【0192】
なお、収差以外の照明系と検出系のモニタリング、結果の装置へのフィードバックは第1の実施の形態同様であるので、説明を省略する。
【0193】
以上のように、本実施の形態によって、データベースから近似する波面収差のデータを抽出することでモニタリングによる結像レンズ22の自動較正を高速に実行する手段を提供することが可能となる。
【0194】
(第6の実施の形態)
以下、第6の実施の形態について図を用いて説明する。
【0195】
本実施の形態は第5の実施の形態の処理フローの一部を変更することで、より高精度な自動較正手段を提供することを目的とする。
【0196】
図25は本実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。これを用いて、第6の実施の形態に関する検出レンズの収差同定フローを説明する。なお、この実施の形態でも点像を用いた場合について述べることとする。
【0197】
点光源から出射された光を結像レンズ22へと導き、センサ23上で結像させ、信号処理部500は結像した点像を制御部800−5内の記録部に801に記録する(ステップS2101)。また予め収差を表すゼルニケ係数をパラメータとして検出レンズの波面収差が様々な場合の点像を理論的に計算し、データベース805に記録しておく(ステップS2102)。
【0198】
次に、制御部800−5内の比較部802によりステップS2101にて取得した点像とステップS2102にて計算した多数の点像のそれぞれの差分を求める。そして、比較部802は差分画像の一部または全部にて残留強度を算出し、その残留強度の最小値と任意に決めた閾値を比較する(ステップS2103)。
【0199】
このとき、最小の残留強度が閾値以上であれば(ステップS2103:No)、収差パラメータを変えて、閾値以下になるまで多数の点像を理論計算し、類似点像を探索する。
【0200】
一方、最小の残留強度が閾値以下であれば(ステップS2103:Yes)、制御部800−5中の収差同定部810にて、差分画像の残留強度が最も低かった点像を類似点像とする(ステップS2104)。この類似点像を計算したときの収差を、結像レンズ収差と同定することで結像レンズ22の自動較正が完了する。
【0201】
以上のように、本実施の形態によって、データベースから近似する波面収差のデータを抽出することでモニタリングによる結像レンズ22の自動較正を高速かつ高精度に実行する手段を提供することが可能となる。
【0202】
なお、収差同定に用いるのは点像でなくとも、被検査物からの散乱光を用いても良いし、検出器モニタリング時に用いる回折格子からの回折光を用いても良い。
【0203】
また、差分画像を用いる代わりに、各画像の強度分布のプロファイルを、画像内の複数の軸にて差分を基準として、類似点像を探索しても良い。
【0204】
(第7の実施の形態)
以下、第7の実施の形態について図を用いて説明する。
【0205】
本実施の形態と本実施の形態の相違点は、結像レンズ22の収差同定フローのみであるため、その他の説明は省略する。
【0206】
図26は本実施の形態に関わる検出レンズの収差同定の手順を表すフローチャートである。これを用いて、第7の実施の形態に関する検出レンズの収差同定フローを説明する。
【0207】
点光源から出射された光を検出レンズに導き、センサ23上に結像させる。この結像した点像から求められた画像データは制御部800−5中の記録部に記録される(ステップS2201)。
【0208】
また、予め収差を表すゼルニケ係数をパラメータとし、検出レンズの波面収差が様々な場合の点像を理論的に計算する。そして、この計算結果をデータベース805に記録しておく(ステップS2202)。
【0209】
次に、制御部800−5内の比較部802により、ステップS2201にて取得した点像の画像データと、ステップS2202でデータベース805中に格納した多数の点像の計算結果との間でそれぞれ差分を求める。そして、差分画像の一部又は全部で残留強度を算出し、その残留強度の最小値となる画像を選択する。ここで収差の変化が小さいときには、点像の強度分布の変化は収差に対する変化を近似することができる(ステップS2204)。
【0210】
このステップS2204で求めた強度分布の変化を線形変化もしくは非線形変化とし、数式を仮定する。この仮定が成り立つ範囲で最適化手法を用いて、残留強度が最小となる収差パラメータを探索する(ステップS2205)。この最適化手法としては、ベンバーグ・マーカート法や最急降下法などを用いることが考えられるが、これらには拘らない。
【0211】
探索した残留強度の最小値と任意に設定した閾値とを比較し(ステップS2206)、この最小値が閾値以下の場合には(ステップS2206:Yes)、差分画像の残留強度が最も低かった点像を類似点像と推定する。そしてこの類似点像と推定された点像の収差を、結像レンズ収差と同定する(ステップS2207)。
【0212】
一方このステップS2206で求めた最小値が閾値より大きい場合(ステップS2206:No)、ローカルミニマム(局所的な最小値)である可能性が高い。そこで、最適化手法の各収差パラメータ間の相関関係などによる制約条件を再考し、再び最適化を行う。
【0213】
この際、差分画像を用いる代わりに、各画像の強度分布のプロファイルを、画像内の複数の軸にて差分を基準として、類似点像を探索しても良い。
【0214】
また、第5の実施の形態同様に、収差同定を用いるのは点像でなくとも、被検査物からの散乱光を用いても良いし、検出器モニタリング時に用いる回折格子からの回折光を用いても良い。
【0215】
以上、本発明者によってなされた発明を実施の形態に基づき具体的に説明したが、本発明は前記の実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更が可能であることは言うまでもない。
【産業上の利用可能性】
【0216】
本発明は、半導体製造、磁気ヘッド製造における暗視野欠陥検査装置での適用を想定して説明した。しかし、必ずしもこの用途に拘るものでなく、電子顕微鏡でなければ確認できないような微生物等の検査などの技術分野に適用することも可能である。
【符号の説明】
【0217】
20…対物レンズ、21…空間フィルタ、22…結像レンズ、23…センサ、
24…ハーフミラー、60…モニタリング用チップ、
100…照明光、101…レーザ、102…エキスパンダ、
103…アッテネータ、104…偏光制御素子、105A、105B…ミラー、
106…レンズ、150…照明系モニタリング部、
250…検出系モニタリング部、251…センサ、300…XYステージ、
400…Zステージ、401…被検査物高さ計測部、
500…信号処理部、501…モニタ、
800、800−2、800−3、800−4、800−5…制御部、
801…記録部、802…比較部、803…感度予測部、
804…フィードバック制御部、805…データベース、810…収差同定部。
【特許請求の範囲】
【請求項1】
被検査物の表面を照明する照明光により前記被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、前記第1のセンサが取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査方法であって、
前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリングステップと、
前記検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び前記被検査物を載置するステージ動作状態を検出する検出系モニタリングステップと、
前記照明光モニタリングステップと前記検出系モニタリングステップの検出結果と理想値とを比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整するフィードバック制御ステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項2】
請求項1に記載の暗視野欠陥検査方法において、前記照明光モニタリングステップは正反射光を利用して前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴とする暗視野欠陥検査方法。
【請求項3】
請求項1に記載の暗視野欠陥検査方法において、前記照明光モニタリングステップは前記被検査物の検査面となるステージ上で前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴とする暗視野欠陥検査方法。
【請求項4】
請求項1に記載の暗視野欠陥検査方法において、前記照明光はレーザを光源とした照明系によって生成され、
前記照明光モニタリングステップにて前記照明光の生成過程の光線の計測結果から検査面上での前記照明光の強度分布と偏光状態分布のいずれか又は双方を推定することを特徴とする暗視野欠陥検査方法。
【請求項5】
請求項1に記載の暗視野欠陥検査方法において、前記検出系モニタリングステップは前記被検査物の検査面となるステージ上に置かれた特性が既知の反射型光学素子にスポット光を斜方照明し得られた前記散乱光を前記第2のセンサにより検出することを特徴とする暗視野欠陥検査方法。
【請求項6】
請求項1に記載の暗視野欠陥検査方法において、前記検出系モニタリングステップは前記被検査物の検査面となるステージ上に置かれた点光源と特性が既知の透過型光学素子を用いることで得られる所定の光を前記第2のセンサにより検出することを特徴とする暗視野欠陥検査方法。
【請求項7】
請求項1に記載の暗視野欠陥検査方法において、前記照明光モニタリングステップ及び前記検出系モニタリングステップの検出結果の経時変化を記録し、統計処理により装置の異常を判断する装置異常確認ステップを更に含むことを特徴とする暗視野欠陥検査方法。
【請求項8】
請求項1に記載の暗視野欠陥検査方法において、更に、前記照明光モニタリングステップ及び前記検出系モニタリングステップの検出結果と前記理想値を同時に表示する検出結果出力ステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項9】
被検査物の表面を照明する照明光により前記被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、前記第1のセンサが取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査方法であって、
前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリングステップと、
前記検出系に入力された前記散乱光を第2のセンサにより検出レンズの結像特性及び前記被検査物を載置するステージ動作状態を検出する検出系モニタリングステップと、
前記照明光モニタリングステップ及び前記検出系モニタリングステップ実行時の温度及び気圧の双方またはいずれか一方を測定する環境測定ステップと、
前記照明光モニタリングステップ、前記検出系モニタリングステップ及び前記環境測定ステップの検出結果と理想値とを比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整するフィードバック制御ステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項10】
請求項9に記載の暗視野欠陥検査方法において、更に、前記照明光モニタリングステップ及び前記検出系モニタリングステップの前記検出結果と前記理想値を表示する検出結果出力ステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項11】
照明光を出力する照明系と、被検査物に照射された前記照明光の散乱光を検出する検出系と、制御部と、を有し、前記被検査物の表面を照明する前記照明光により前記被検査物表面から生じる前記散乱光の信号を前記検出系の第1のセンサで取得し、取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査装置であって、
前記照明系は前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段を有し、
前記検出系は前記検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び前記被検査物を載置するステージ動作状態を検出する検出系モニタリング手段を有し、
前記制御部は前記照明光モニタリング手段と前記検出系モニタリング手段の検出結果と理想値とを比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整することを特徴とする暗視野欠陥検査装置。
【請求項12】
請求項11に記載の暗視野欠陥検査装置において、前記照明光モニタリング手段は正反射光を利用して前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴とする暗視野欠陥検査装置。
【請求項13】
請求項11に記載の暗視野欠陥検査装置において、前記照明光モニタリング手段は前記被検査物の検査面となるステージ上で前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴とする暗視野欠陥検査装置。
【請求項14】
請求項11に記載の暗視野欠陥検査装置において、前記照明光は前記照明系内部のレーザを光源とし、
前記照明光モニタリング手段は前記照明光の生成過程の光線の計測結果から検査面上での前記照明光の強度分布と偏光状態分布のいずれか又は双方を推定することを特徴とする暗視野欠陥検査装置。
【請求項15】
請求項11に記載の暗視野欠陥検査装置において、前記検出系モニタリング手段は前記被検査物の検査面となるステージ上に置かれた特性が既知の反射型光学素子にスポット光を斜方照明し得られた前記散乱光を前記第2のセンサにより検出することを特徴とする暗視野欠陥検査装置。
【請求項16】
請求項11に記載の暗視野欠陥検査装置において、前記検出系モニタリング手段は前記被検査物の検査面となるステージ上に置かれた点光源と特性が既知の透過型光学素子を用いることで得られる所定の光を前記第2のセンサにより検出することを特徴とする暗視野欠陥検査装置。
【請求項17】
請求項11に記載の暗視野欠陥検査装置において、前記照明光モニタリング手段及び前記検出系モニタリング手段の前記検出結果の経時変化を記録し、統計処理により装置の異常を判断する装置異常確認手段を更に含むことを特徴とする暗視野欠陥検査装置。
【請求項18】
請求項11に記載の暗視野欠陥検査装置において、更に、前記照明光モニタリング手段及び前記検出系モニタリング手段の前記検出結果と前記理想値を同時に表示する検出結果出力手段と、を含むことを特徴とする暗視野欠陥検査装置。
【請求項19】
照明光を出力する照明系と、被検査物に照射された前記照明光の散乱光を検出する検出系と、制御部と、を有し、前記被検査物の表面を照明する前記照明光により前記被検査物表面から生じる散乱光の信号を前記検出系の第1のセンサで取得し、取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査装置であって、
前記照明系は前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段を有し、
前記検出系は前記検出系に入力された光を第2のセンサにより検出することで焦点検出レンズの結像特性及び前記被検査物を載置するステージ動作状態を検出する検出系モニタリング手段を有し、
前記制御部は前記照明光モニタリング手段と前記検出系モニタリング手段の検出結果と理想値とを比較する比較部と、
前記照明光モニタリング手段及び前記検出系モニタリング手段実行時の温度及び気圧の双方またはいずれか一方を測定する環境測定手段と、
前記照明光モニタリング手段、前記検出系モニタリング手段及び前記環境測定手段の検出結果と予め算出しておいた理想値とを比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整するフィードバック手段と、を有することを特徴とする暗視野欠陥検査装置。
【請求項20】
請求項19に記載の暗視野欠陥検査装置において、更に、前記照明光モニタリング手段、前記検出系モニタリング手段及び前記環境測定手段の検出結果とそれぞれの前記理想値を表示する検出結果出力手段と、を含むことを特徴とする暗視野欠陥検査装置。
【請求項21】
被検査物の表面を照明する照明光により前記被検査物表面から生じる散乱光の信号を検出系センサで取得し、前記センサが取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査方法であって、
前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリングステップと、
前記検出系センサに入力された光を検出系のセンサにより検出することで検出レンズの焦点距離を検出する第1の検出系モニタリングステップと、
前記検出レンズにて結像された像と収差をパラメータとして理論計算により導出した多数の像から類似像を探索することにより前記検出レンズの収差を同定する第2の検出系モニタリングステップと、
前記照明光モニタリングステップと前記第2の検出系モニタリングステップの検出結果と2以上の理想値を比較し、前記第2の検出系モニタリングステップの検出結果と理想値との差分のうちの最小値が許容値以下となるよう前記照明光、前記第1の検出系モニタリングステップ及び前記第2の検出系モニタリングステップのいずれか又はそれぞれを調整するフィードバックステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項22】
請求項21に記載の暗視野欠陥検査方法において、前記第2の検出系モニタリングステップで点像を用いて前記類似像を探索することを特徴とする暗視野欠陥検査方法。
【請求項23】
被検査物の表面を照明する照明光により前記被検査物表面から生じる散乱光の信号を検出系のセンサで取得し、前記センサが取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査装置であって、
前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段と、
前記検出系に入力された光を検出系のセンサにより検出することで検出レンズの焦点距離を検出し、また、検出レンズにて検出された像と収差をパラメータとして理論計算により導出した多数の像を対比することで類似像を探索することにより検出レンズの収差を同定する検出系モニタリング手段と、
前記照明光モニタリング手段と前記検出系モニタリング手段の検出結果と理想値を比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整するフィードバック制御手段と、を持つことを特徴とする暗視野欠陥検査装置。
【請求項24】
請求項23に記載の暗視野欠陥検査装置において、検出系モニタリング手段で点像を用いて前記類似像を探索することを特徴とする暗視野欠陥検査装置。
【請求項25】
暗視野欠陥検査装置の結像レンズの収差を同定する制御部が結像レンズの波面収差を求めるための収差解析方法であって、
前記制御部は既知の強度分布を持つ光を入射光として前記結像レンズを透過させてその透過光分布の画像を取得し、取得した画像のデータと波面収差をパラメータとして理論的に算出した透過光分布の画像データとを比較し、両者が類似しているならば類似している透過光分布の画像を計算した際にパラメータとして用いた波面収差を前記結像レンズの波面収差と同定することを特徴とする収差解析方法。
【請求項26】
請求項25に記載の収差解析方法において、前記波面収差をパラメータとして理論的に算出した透過光分布の画像データとして複数の透過分布の画像を計算し、その中から、前記結像レンズの透過光分布の画像と類似したものを選択することを特徴とする収差解析方法。
【請求項27】
請求項25に記載の収差解析方法において、前記結像レンズを通してセンサに結像された像又は点光源を結像した像の強度分布を用いて前記結像レンズの波面収差を同定することを特徴とする収差解析方法。
【請求項28】
請求項25に記載の収差解析方法において、類似画像の判定に、取得透過光分布の画像と算出した透過光分布の画像との差分である差分画像及び差分画像の一部もしくは全部の残留強度を指標として利用することを特徴とする収差解析方法。
【請求項29】
請求項25に記載の収差解析方法において、透過光の画像内の複数の軸において強度分布のプロファイルを比較し、前記類似像を探索することを特徴とする収差解析方法。
【請求項30】
結像レンズの収差を求める収差解析装置であって、
前記収差解析装置は既知の強度分布を持つ光を入射光として結像レンズを透過させ、その透過光分布の画像をセンサによって取得し、波面収差をパラメータとして理論的に算出した透過光分布の画像とを比較し、
両者が類似しているならば、前記収差解析装置は類似している透過光分布の画像を計算した際にパラメータとして用いた波面収差を前記結像レンズの波面収差と同定することを特徴とする収差解析装置。
【請求項31】
請求項30に記載の収差解析装置において、異なる収差をパラメータとし、複数の透過光分布の画像を計算し、その中から前記収差解析装置が前記結像レンズの透過光分布の画像と類似した画像を選択することを特徴とする収差解析装置。
【請求項32】
請求項30に記載の収差解析装置において、前記結像レンズ及び前記センサにて結像された像、もしくは点光源を結像した点像の強度分布を利用することを特徴とする収差解析装置。
【請求項33】
請求項30に記載の収差解析装置において、類似画像の判定に、取得透過光分布の画像と算出した透過光分布の画像との差分である差分画像、及び差分画像の一部もしくは全部の残留強度を指標として用いることを特徴とする収差解析装置。
【請求項34】
請求項30に記載の収差解析装置において、透過光の画像内の複数の軸で強度分布のプロファイルを比較し、前記類似像を探索することを特徴とする収差解析方法。
【請求項1】
被検査物の表面を照明する照明光により前記被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、前記第1のセンサが取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査方法であって、
前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリングステップと、
前記検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び前記被検査物を載置するステージ動作状態を検出する検出系モニタリングステップと、
前記照明光モニタリングステップと前記検出系モニタリングステップの検出結果と理想値とを比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整するフィードバック制御ステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項2】
請求項1に記載の暗視野欠陥検査方法において、前記照明光モニタリングステップは正反射光を利用して前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴とする暗視野欠陥検査方法。
【請求項3】
請求項1に記載の暗視野欠陥検査方法において、前記照明光モニタリングステップは前記被検査物の検査面となるステージ上で前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴とする暗視野欠陥検査方法。
【請求項4】
請求項1に記載の暗視野欠陥検査方法において、前記照明光はレーザを光源とした照明系によって生成され、
前記照明光モニタリングステップにて前記照明光の生成過程の光線の計測結果から検査面上での前記照明光の強度分布と偏光状態分布のいずれか又は双方を推定することを特徴とする暗視野欠陥検査方法。
【請求項5】
請求項1に記載の暗視野欠陥検査方法において、前記検出系モニタリングステップは前記被検査物の検査面となるステージ上に置かれた特性が既知の反射型光学素子にスポット光を斜方照明し得られた前記散乱光を前記第2のセンサにより検出することを特徴とする暗視野欠陥検査方法。
【請求項6】
請求項1に記載の暗視野欠陥検査方法において、前記検出系モニタリングステップは前記被検査物の検査面となるステージ上に置かれた点光源と特性が既知の透過型光学素子を用いることで得られる所定の光を前記第2のセンサにより検出することを特徴とする暗視野欠陥検査方法。
【請求項7】
請求項1に記載の暗視野欠陥検査方法において、前記照明光モニタリングステップ及び前記検出系モニタリングステップの検出結果の経時変化を記録し、統計処理により装置の異常を判断する装置異常確認ステップを更に含むことを特徴とする暗視野欠陥検査方法。
【請求項8】
請求項1に記載の暗視野欠陥検査方法において、更に、前記照明光モニタリングステップ及び前記検出系モニタリングステップの検出結果と前記理想値を同時に表示する検出結果出力ステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項9】
被検査物の表面を照明する照明光により前記被検査物表面から生じる散乱光の信号を検出系の第1のセンサで取得し、前記第1のセンサが取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査方法であって、
前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリングステップと、
前記検出系に入力された前記散乱光を第2のセンサにより検出レンズの結像特性及び前記被検査物を載置するステージ動作状態を検出する検出系モニタリングステップと、
前記照明光モニタリングステップ及び前記検出系モニタリングステップ実行時の温度及び気圧の双方またはいずれか一方を測定する環境測定ステップと、
前記照明光モニタリングステップ、前記検出系モニタリングステップ及び前記環境測定ステップの検出結果と理想値とを比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整するフィードバック制御ステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項10】
請求項9に記載の暗視野欠陥検査方法において、更に、前記照明光モニタリングステップ及び前記検出系モニタリングステップの前記検出結果と前記理想値を表示する検出結果出力ステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項11】
照明光を出力する照明系と、被検査物に照射された前記照明光の散乱光を検出する検出系と、制御部と、を有し、前記被検査物の表面を照明する前記照明光により前記被検査物表面から生じる前記散乱光の信号を前記検出系の第1のセンサで取得し、取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査装置であって、
前記照明系は前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段を有し、
前記検出系は前記検出系に入力された光を第2のセンサにより検出することで検出レンズの結像特性及び前記被検査物を載置するステージ動作状態を検出する検出系モニタリング手段を有し、
前記制御部は前記照明光モニタリング手段と前記検出系モニタリング手段の検出結果と理想値とを比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整することを特徴とする暗視野欠陥検査装置。
【請求項12】
請求項11に記載の暗視野欠陥検査装置において、前記照明光モニタリング手段は正反射光を利用して前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴とする暗視野欠陥検査装置。
【請求項13】
請求項11に記載の暗視野欠陥検査装置において、前記照明光モニタリング手段は前記被検査物の検査面となるステージ上で前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測することを特徴とする暗視野欠陥検査装置。
【請求項14】
請求項11に記載の暗視野欠陥検査装置において、前記照明光は前記照明系内部のレーザを光源とし、
前記照明光モニタリング手段は前記照明光の生成過程の光線の計測結果から検査面上での前記照明光の強度分布と偏光状態分布のいずれか又は双方を推定することを特徴とする暗視野欠陥検査装置。
【請求項15】
請求項11に記載の暗視野欠陥検査装置において、前記検出系モニタリング手段は前記被検査物の検査面となるステージ上に置かれた特性が既知の反射型光学素子にスポット光を斜方照明し得られた前記散乱光を前記第2のセンサにより検出することを特徴とする暗視野欠陥検査装置。
【請求項16】
請求項11に記載の暗視野欠陥検査装置において、前記検出系モニタリング手段は前記被検査物の検査面となるステージ上に置かれた点光源と特性が既知の透過型光学素子を用いることで得られる所定の光を前記第2のセンサにより検出することを特徴とする暗視野欠陥検査装置。
【請求項17】
請求項11に記載の暗視野欠陥検査装置において、前記照明光モニタリング手段及び前記検出系モニタリング手段の前記検出結果の経時変化を記録し、統計処理により装置の異常を判断する装置異常確認手段を更に含むことを特徴とする暗視野欠陥検査装置。
【請求項18】
請求項11に記載の暗視野欠陥検査装置において、更に、前記照明光モニタリング手段及び前記検出系モニタリング手段の前記検出結果と前記理想値を同時に表示する検出結果出力手段と、を含むことを特徴とする暗視野欠陥検査装置。
【請求項19】
照明光を出力する照明系と、被検査物に照射された前記照明光の散乱光を検出する検出系と、制御部と、を有し、前記被検査物の表面を照明する前記照明光により前記被検査物表面から生じる散乱光の信号を前記検出系の第1のセンサで取得し、取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査装置であって、
前記照明系は前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段を有し、
前記検出系は前記検出系に入力された光を第2のセンサにより検出することで焦点検出レンズの結像特性及び前記被検査物を載置するステージ動作状態を検出する検出系モニタリング手段を有し、
前記制御部は前記照明光モニタリング手段と前記検出系モニタリング手段の検出結果と理想値とを比較する比較部と、
前記照明光モニタリング手段及び前記検出系モニタリング手段実行時の温度及び気圧の双方またはいずれか一方を測定する環境測定手段と、
前記照明光モニタリング手段、前記検出系モニタリング手段及び前記環境測定手段の検出結果と予め算出しておいた理想値とを比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整するフィードバック手段と、を有することを特徴とする暗視野欠陥検査装置。
【請求項20】
請求項19に記載の暗視野欠陥検査装置において、更に、前記照明光モニタリング手段、前記検出系モニタリング手段及び前記環境測定手段の検出結果とそれぞれの前記理想値を表示する検出結果出力手段と、を含むことを特徴とする暗視野欠陥検査装置。
【請求項21】
被検査物の表面を照明する照明光により前記被検査物表面から生じる散乱光の信号を検出系センサで取得し、前記センサが取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査方法であって、
前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリングステップと、
前記検出系センサに入力された光を検出系のセンサにより検出することで検出レンズの焦点距離を検出する第1の検出系モニタリングステップと、
前記検出レンズにて結像された像と収差をパラメータとして理論計算により導出した多数の像から類似像を探索することにより前記検出レンズの収差を同定する第2の検出系モニタリングステップと、
前記照明光モニタリングステップと前記第2の検出系モニタリングステップの検出結果と2以上の理想値を比較し、前記第2の検出系モニタリングステップの検出結果と理想値との差分のうちの最小値が許容値以下となるよう前記照明光、前記第1の検出系モニタリングステップ及び前記第2の検出系モニタリングステップのいずれか又はそれぞれを調整するフィードバックステップと、を含むことを特徴とする暗視野欠陥検査方法。
【請求項22】
請求項21に記載の暗視野欠陥検査方法において、前記第2の検出系モニタリングステップで点像を用いて前記類似像を探索することを特徴とする暗視野欠陥検査方法。
【請求項23】
被検査物の表面を照明する照明光により前記被検査物表面から生じる散乱光の信号を検出系のセンサで取得し、前記センサが取得した信号に基づき前記被検査物上の異物や欠陥を検出する暗視野欠陥検査装置であって、
前記照明光の強度分布と偏光状態分布のいずれか又は双方を計測する照明光モニタリング手段と、
前記検出系に入力された光を検出系のセンサにより検出することで検出レンズの焦点距離を検出し、また、検出レンズにて検出された像と収差をパラメータとして理論計算により導出した多数の像を対比することで類似像を探索することにより検出レンズの収差を同定する検出系モニタリング手段と、
前記照明光モニタリング手段と前記検出系モニタリング手段の検出結果と理想値を比較し、それぞれの前記検出結果と前記理想値との差分が許容値以下となるよう前記照明光と前記検出系のいずれか又は双方を調整するフィードバック制御手段と、を持つことを特徴とする暗視野欠陥検査装置。
【請求項24】
請求項23に記載の暗視野欠陥検査装置において、検出系モニタリング手段で点像を用いて前記類似像を探索することを特徴とする暗視野欠陥検査装置。
【請求項25】
暗視野欠陥検査装置の結像レンズの収差を同定する制御部が結像レンズの波面収差を求めるための収差解析方法であって、
前記制御部は既知の強度分布を持つ光を入射光として前記結像レンズを透過させてその透過光分布の画像を取得し、取得した画像のデータと波面収差をパラメータとして理論的に算出した透過光分布の画像データとを比較し、両者が類似しているならば類似している透過光分布の画像を計算した際にパラメータとして用いた波面収差を前記結像レンズの波面収差と同定することを特徴とする収差解析方法。
【請求項26】
請求項25に記載の収差解析方法において、前記波面収差をパラメータとして理論的に算出した透過光分布の画像データとして複数の透過分布の画像を計算し、その中から、前記結像レンズの透過光分布の画像と類似したものを選択することを特徴とする収差解析方法。
【請求項27】
請求項25に記載の収差解析方法において、前記結像レンズを通してセンサに結像された像又は点光源を結像した像の強度分布を用いて前記結像レンズの波面収差を同定することを特徴とする収差解析方法。
【請求項28】
請求項25に記載の収差解析方法において、類似画像の判定に、取得透過光分布の画像と算出した透過光分布の画像との差分である差分画像及び差分画像の一部もしくは全部の残留強度を指標として利用することを特徴とする収差解析方法。
【請求項29】
請求項25に記載の収差解析方法において、透過光の画像内の複数の軸において強度分布のプロファイルを比較し、前記類似像を探索することを特徴とする収差解析方法。
【請求項30】
結像レンズの収差を求める収差解析装置であって、
前記収差解析装置は既知の強度分布を持つ光を入射光として結像レンズを透過させ、その透過光分布の画像をセンサによって取得し、波面収差をパラメータとして理論的に算出した透過光分布の画像とを比較し、
両者が類似しているならば、前記収差解析装置は類似している透過光分布の画像を計算した際にパラメータとして用いた波面収差を前記結像レンズの波面収差と同定することを特徴とする収差解析装置。
【請求項31】
請求項30に記載の収差解析装置において、異なる収差をパラメータとし、複数の透過光分布の画像を計算し、その中から前記収差解析装置が前記結像レンズの透過光分布の画像と類似した画像を選択することを特徴とする収差解析装置。
【請求項32】
請求項30に記載の収差解析装置において、前記結像レンズ及び前記センサにて結像された像、もしくは点光源を結像した点像の強度分布を利用することを特徴とする収差解析装置。
【請求項33】
請求項30に記載の収差解析装置において、類似画像の判定に、取得透過光分布の画像と算出した透過光分布の画像との差分である差分画像、及び差分画像の一部もしくは全部の残留強度を指標として用いることを特徴とする収差解析装置。
【請求項34】
請求項30に記載の収差解析装置において、透過光の画像内の複数の軸で強度分布のプロファイルを比較し、前記類似像を探索することを特徴とする収差解析方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2010−190885(P2010−190885A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2009−259488(P2009−259488)
【出願日】平成21年11月13日(2009.11.13)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成21年11月13日(2009.11.13)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]