
曲げ加工装置
【課題】金属板の端部に対してしわを生じさせることなく曲げ加工を施すことができ、その結果、端部のしわを直す矯正作業を必要としない分だけ、生産効率の向上を実現することが可能である曲げ加工装置を提供する。
【解決手段】鋼板Wを載置して支持する金属板載置部2と、水平方向及び垂直方向に移動可能に設けられて、金属板載置部2上にセットした鋼板Wの端部における適宜部位を表裏側から加熱して曲げる加熱機構20を備えている。加熱機構20は、金属板載置部2に沿って移動する門型台車14上に設けた一方の6軸多関節ロボット17のハンド17aに装着した表面側加熱部21と、他方の6軸多関節ロボット18のハンド18aに装着した裏面側加熱部22とから成っている。
【解決手段】鋼板Wを載置して支持する金属板載置部2と、水平方向及び垂直方向に移動可能に設けられて、金属板載置部2上にセットした鋼板Wの端部における適宜部位を表裏側から加熱して曲げる加熱機構20を備えている。加熱機構20は、金属板載置部2に沿って移動する門型台車14上に設けた一方の6軸多関節ロボット17のハンド17aに装着した表面側加熱部21と、他方の6軸多関節ロボット18のハンド18aに装着した裏面側加熱部22とから成っている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鋼板等の金属板に曲げ加工を施すのに用いられる曲げ加工装置に係わり、特に、金属板の端部に曲げ加工を施すのに好適な曲げ加工装置に関するものである。
【背景技術】
【0002】
従来、上記したような曲げ加工装置としては、例えば、高さ調整可能な支持柱を複数配置して成る金属板載置部を備えていると共に、この金属板載置部上にセットした金属板の表面に沿って移動可能とした加熱部及び冷却部を備えたものがある。
この曲げ加工装置では、金属板載置部上にセットした金属板の表面における必要部位に加熱部及び冷却部を順次移動させて、その部位毎に加熱冷却を繰り返して曲げ加工を施すことで、金属板の全体を所望形状に曲げるようにしている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平08-290218号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、上記した従来の曲げ加工装置において、金属板の中央部はしわなく曲げることができるものの、端部にはしわが生じ易く、多くの場合、端部に生じたしわを直すための矯正作業を必要としている。その結果、生産効率が良いとは言えないという問題を有しており、この問題を解決することが従来の課題となっていた。
本発明は、上記した従来の課題に着目してなされたもので、金属板の端部に対してしわを生じさせることなく曲げ加工を施すことができ、その結果、端部のしわを直す矯正作業を必要としない分だけ、生産効率の向上を実現することが可能である曲げ加工装置を提供することを目的としている。
【課題を解決するための手段】
【0005】
一般的に、金属板をその表面側から線状に加熱して曲げ加工を行うと、金属板の端部にしわが生じやすいことが知られているが、本発明者らは、金属板の端部からしわを除去するのに、端部の表裏側から加熱することが有効であることに着目し、本発明をするに至った。
すなわち、本発明の請求項1に係る発明は、鋼板等の金属板の端部に曲げ加工を施す曲げ加工装置であって、前記金属板を載置して支持する金属板載置部と、水平方向及び垂直方向に移動可能に設けられて、前記金属板載置部上にセットした金属板の端部における適宜部位を表裏側から加熱して曲げる加熱機構を備えている構成としたことを特徴としており、この曲げ加工装置の構成を前述した従来の課題を解決するための手段としている。
【0006】
この場合、金属板を表裏側から加熱して曲げる加熱機構を水平方向及び垂直方向に移動させる手段としては、台車やロボットを採用することができ、例えば、ハンドを有する6軸多関節ロボットを採用することができる。
具体的には、本発明の請求項2に係る曲げ加工装置のように、前記金属板載置部に沿って移動する台車と、この台車上に設けた6軸多関節ロボットを備え、前記加熱機構は、前記6軸多関節ロボットのハンドに装着してある構成とすることができ、この構成を用いる場合には、例えば、クランプタイプの加熱機構を採用することができる。
【0007】
また、本発明の請求項3に係る曲げ加工装置のように、前記金属板載置部に沿って移動する台車と、この台車上に設けた2台の6軸多関節ロボットを備え、前記加熱機構は、一方の6軸多関節ロボットのハンドに装着した表面側加熱部と、他方の6軸多関節ロボットのハンドに装着した裏面側加熱部とから成っている構成とすることができる。
この際、表面側加熱部を装着した一方の6軸多関節ロボット及び裏面側加熱部を装着した他方の6軸多関節ロボットを一組のロボットユニットとして、このロボットユニットを複数組配置することも可能である。
【0008】
さらに、本発明の請求項4に係る曲げ加工装置のように、前記台車は、金属板載置部を跨る門型を成し、前記6軸多関節ロボットを前記門型台車の横梁に沿って移動させるロボット駆動機構を備えている構成としてもよい。
ここで、6軸多関節ロボットを門型台車の横梁に沿って移動させるロボット駆動機構としては、とくに限定はしないが、モータ出力をラック&ピニオン方式でロボットに伝達するようにした構造が簡易な駆動機構を採用することが望ましい。
【0009】
本発明の曲げ加工装置は、金属板の曲げ加工場において単独で設置してもよいが、従来周知の曲げ加工装置に併設することが望ましく、この場合には、まず、金属板載置部にセットした金属板の中央部に対して既存の曲げ加工装置によって曲げ加工を施した後、本発明の曲げ加工装置の加熱機構により金属板の端部を表裏側から加熱すれば、金属板の中央部は勿論のこと、端部においてもしわなく曲がることになるので、面倒なしわの矯正作業を必要としない分だけ、生産効率が向上することとなる。
【発明の効果】
【0010】
本発明の請求項1に係る曲げ加工装置では、上記した構成としているので、金属板載置部にセットした金属板の端部を加熱機構によって表裏側から加熱することで、端部に対してしわを生じさせることなく曲げ加工を施すことができ、したがって、従来必要としていた端部のしわを直す矯正作業を行わなくて済む分だけ、生産効率の向上を実現することが可能であるという非常に優れた効果がもたらされる。
【0011】
また、本発明の請求項2〜4に係る曲げ加工装置では、上記した構成としたため、金属板の端部を加熱機構によって表裏側から加熱するに際して、金属板の細かな形状(曲率)変化に対応することができるという非常に優れた効果がもたらされる。
【図面の簡単な説明】
【0012】
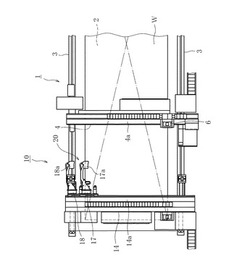
【図1】本発明に係る曲げ加工装置の一実施例を示す既存の曲げ加工装置に併設した状況における部分平面説明図である。
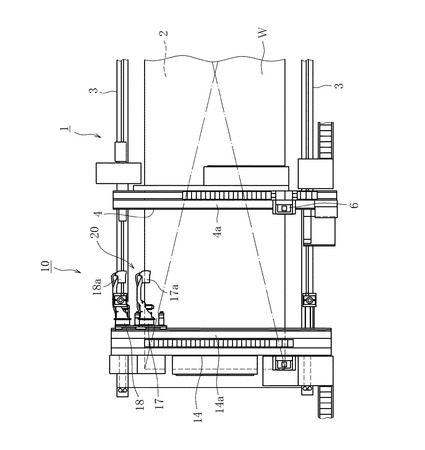
【図2】図1に示した曲げ加工装置の部分側面説明図である。
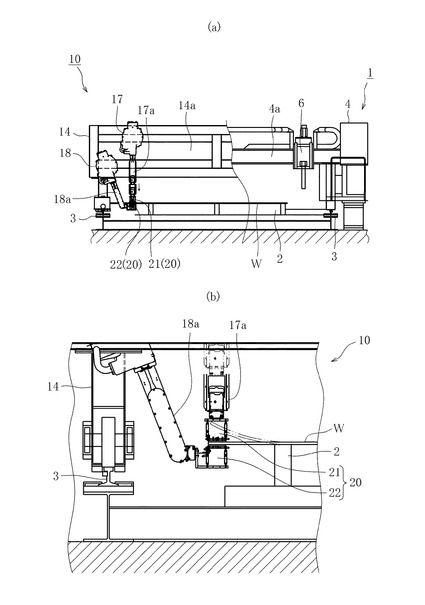
【図3】図1に示した曲げ加工装置の半割正面図及び既存の曲げ加工装置の半割正面図を合わせて表した説明図(a)及び曲げ加工装置の加熱機構部位における部分拡大説明図である。
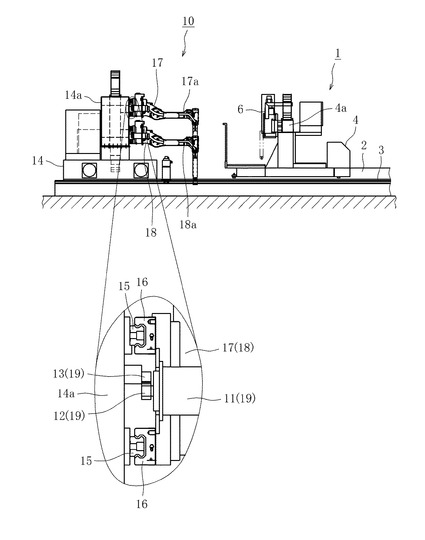
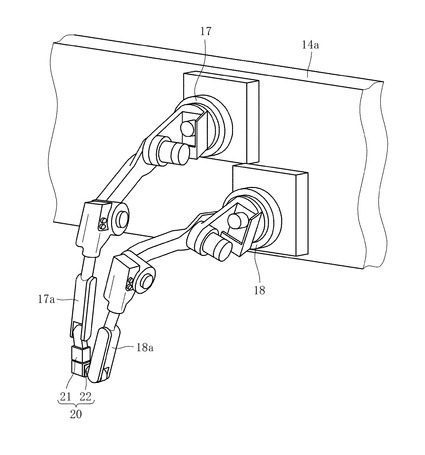
【図4】図1における曲げ加工装置の6軸多関節ロボットの位置関係を示す斜視説明図である。
【発明を実施するための形態】
【0013】
以下、本発明に係る曲げ加工装置を図面に基づいて説明する。
図1〜図4は、本発明に係る曲げ加工装置の一実施例を示しており、この実施例では、本発明に係る曲げ加工装置を既存の曲げ加工装置に併設した場合を例に挙げて説明する。
図1及び図2に示すように、既存の曲げ加工装置1は、金属板である鋼板Wが搬入されてセットされる金属板載置部2と、この金属板載置部2の両側(図1上下側)に沿って配置したレール3と、金属板載置部2に跨って設けられてレール3上をラック&ピニオン方式で走行する門型台車4と、この門型台車4の横梁4a上を往復移動して鋼板Wの適宜部位において表面側から加熱して曲げる中焼き加熱ヘッド6を備えている。
【0014】
この既存の曲げ加工装置1に併設した本実施例に係る曲げ加工装置10は、上記した金属板載置部2及びレール3を使用するものとしており、金属板載置部2に跨って設けられて門型台車4と同じくレール3上をラック&ピニオン方式で走行する門型台車14と、この門型台車14の横梁14aに上下方向7に並べて配置されて、図2における拡大円内に示すように、横梁14aに設置したリニアガイド15にスライダ16を係合させることで横梁14aに沿ってそれぞれ移動可能とした2台の6軸多関節ロボット17,18と、金属板載置部2上にセットした鋼板Wの端部における適宜部位を表裏側から加熱して曲げる加熱機構20を備えている。
【0015】
この場合、加熱機構20は、図3及び図4にも示すように、上側に位置する6軸多関節ロボット17のハンド17aに装着されて鋼板Wの端部における適宜部位を表側から加熱する表面側加熱部21と、下側に位置する6軸多関節ロボット18のハンド18aに装着されて鋼板Wの端部における適宜部位を裏側から加熱する裏面側加熱部22とを具備している。
【0016】
そして、これらの表面側加熱部21及び裏面側加熱部22を保持する6軸多関節ロボット17,18は、モータ11の出力軸に装着したピニオン12及びこのピニオン12と噛み合うラック13を具備したロボット駆動機構19により伝達されるモータ11の出力によって駆動されるものとなっている。
つまり、門型台車14及び2台の6軸多関節ロボット17,18を駆動すると共に、これらの6軸多関節ロボット17,18自身を動作させることで、加熱機構20の表面側加熱部21及び裏面側加熱部22を水平方向及び垂直方向に移動させることができるようにしてあり、これにより、金属板載置部2上にセットした鋼板Wの端部におけるすべての部位をカバーすることができるようにしてある。
【0017】
次に、上記した本実施例に係る曲げ加工装置10の動作を説明する。
まず、本実施例に係る曲げ加工装置10が併設された既存の曲げ加工装置1を動作させて、金属板載置部2に搬入されてセットされた鋼板Wの中央部における必要部位に中焼き加熱ヘッド6を順次移動させて、その部位毎に加熱冷却を繰り返して曲げ加工を施し、鋼板Wの中央部を所定形状に湾曲させる。
【0018】
次いで、本実施例に係る曲げ加工装置10の門型台車14及び下側の6軸多関節ロボット18を駆動して、この6軸多関節ロボット18を所定の部位に移動させるのに続いて、この6軸多関節ロボット18自身を動作させて裏面側加熱部22を装着したハンド18aにあらかじめティーチングした姿勢をとらせると共に、金属板載置部2にセットされた鋼板Wの端部の裏側に裏面側加熱部22を移動させて鋼板Wの端部に接触させる。
【0019】
この後、上側の6軸多関節ロボット17を駆動して所定の部位に移動させるのに続いて、この6軸多関節ロボット17自身を動作させて表面側加熱部21を装着したハンド17aにあらかじめティーチングした姿勢をとらせると共に、図3(b)に実線で示すようにして表面側加熱部21を金属板載置部2にセットされた鋼板Wの端部の表側に接触させ、この状態で加熱することにより曲げ加工を行う。
【0020】
そして、この部位における曲げ加工が終了した時点で、6軸多関節ロボット17,18をそれぞれ動作させて、図3(b)に仮想線で示すように、ハンド17aに装着した表面側加熱部21を湾曲している鋼板Wの端部から離間させるべく上昇させると共に、18aに装着した裏面側加熱部22を鋼板Wの端部から離間させ、6軸多関節ロボット17,18を互いの干渉を避けつつ次の加工部位にそれぞれ移動させる。
【0021】
このように、金属板載置部2にセットした鋼板Wの中央部に対して既存の曲げ加工装置1によって曲げ加工を施した後、本実施例による曲げ加工装置10により鋼板Wの端部を表裏側から加熱すれば、鋼板Wの中央部は言うまでもなく、端部においてもしわなく曲がることになるので、面倒なしわの矯正作業を必要としない分だけ、生産効率が向上することとなる。
【0022】
また、本実施例による曲げ加工装置10では、加熱機構20が、上側の6軸多関節ロボット17のハンド17aに装着した表面側加熱部21と、下側の6軸多関節ロボット18のハンド18aに装着した裏面側加熱部22を具備した構成としていることから、上記のように鋼板Wの端部を表裏側から加熱するに際して、鋼板Wの細かな形状(曲率)変化に対応し得ることとなる。
【0023】
上記したように、この実施例では、本発明に係る曲げ加工装置を既存の曲げ加工装置1に併設した場合を例に挙げて説明したが、曲げ加工場において、本発明に係る曲げ加工装置を単独で設置することも可能である。
また、上記した実施例では、加熱機構20の表面側加熱部21及び裏面側加熱部22を2台の6軸多関節ロボット17,18の各ハンド17a,18aに分けて装着した構成としているが、これに限定されるものではなく、他の構成として、例えば、クランプタイプの加熱機構を採用して、このクランプタイプの加熱機構を1台の6軸多関節ロボットのハンドに装着するようにしてもよい。
【0024】
さらに、上記した実施例による曲げ加工装置10では、加熱機構20の表面側加熱部21を装着した一方の6軸多関節ロボット17及び裏面側加熱部22を装着した他方の6軸多関節ロボット18を備えている構成としているが、これらの6軸多関節ロボット17,18を一組のロボットユニットとして、このロボットユニットを複数組配置することも可能である。
【0025】
さらまた、上記した実施例による曲げ加工装置10では、門型台車14及び6軸多関節ロボット17,18の駆動機構としてラック&ピニオン方式を採用しているが、これに限定されるものではなく、本発明に係る曲げ加工装置の他の構成も、上記した実施例による曲げ加工装置10の構成に限定されるものではない。
【符号の説明】
【0026】
2 金属板載置部
10 曲げ加工装置
11 モータ(ロボット駆動機構)
12 ピニオン(ロボット駆動機構)
13 ラック(ロボット駆動機構)
14 門型台車
14a 横梁
17,18 6軸多関節ロボット
17a,18a ロボットのハンド
19 ロボット駆動機構
20 加熱機構
21 表面側加熱部
22 裏面側加熱部
【技術分野】
【0001】
本発明は、鋼板等の金属板に曲げ加工を施すのに用いられる曲げ加工装置に係わり、特に、金属板の端部に曲げ加工を施すのに好適な曲げ加工装置に関するものである。
【背景技術】
【0002】
従来、上記したような曲げ加工装置としては、例えば、高さ調整可能な支持柱を複数配置して成る金属板載置部を備えていると共に、この金属板載置部上にセットした金属板の表面に沿って移動可能とした加熱部及び冷却部を備えたものがある。
この曲げ加工装置では、金属板載置部上にセットした金属板の表面における必要部位に加熱部及び冷却部を順次移動させて、その部位毎に加熱冷却を繰り返して曲げ加工を施すことで、金属板の全体を所望形状に曲げるようにしている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平08-290218号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、上記した従来の曲げ加工装置において、金属板の中央部はしわなく曲げることができるものの、端部にはしわが生じ易く、多くの場合、端部に生じたしわを直すための矯正作業を必要としている。その結果、生産効率が良いとは言えないという問題を有しており、この問題を解決することが従来の課題となっていた。
本発明は、上記した従来の課題に着目してなされたもので、金属板の端部に対してしわを生じさせることなく曲げ加工を施すことができ、その結果、端部のしわを直す矯正作業を必要としない分だけ、生産効率の向上を実現することが可能である曲げ加工装置を提供することを目的としている。
【課題を解決するための手段】
【0005】
一般的に、金属板をその表面側から線状に加熱して曲げ加工を行うと、金属板の端部にしわが生じやすいことが知られているが、本発明者らは、金属板の端部からしわを除去するのに、端部の表裏側から加熱することが有効であることに着目し、本発明をするに至った。
すなわち、本発明の請求項1に係る発明は、鋼板等の金属板の端部に曲げ加工を施す曲げ加工装置であって、前記金属板を載置して支持する金属板載置部と、水平方向及び垂直方向に移動可能に設けられて、前記金属板載置部上にセットした金属板の端部における適宜部位を表裏側から加熱して曲げる加熱機構を備えている構成としたことを特徴としており、この曲げ加工装置の構成を前述した従来の課題を解決するための手段としている。
【0006】
この場合、金属板を表裏側から加熱して曲げる加熱機構を水平方向及び垂直方向に移動させる手段としては、台車やロボットを採用することができ、例えば、ハンドを有する6軸多関節ロボットを採用することができる。
具体的には、本発明の請求項2に係る曲げ加工装置のように、前記金属板載置部に沿って移動する台車と、この台車上に設けた6軸多関節ロボットを備え、前記加熱機構は、前記6軸多関節ロボットのハンドに装着してある構成とすることができ、この構成を用いる場合には、例えば、クランプタイプの加熱機構を採用することができる。
【0007】
また、本発明の請求項3に係る曲げ加工装置のように、前記金属板載置部に沿って移動する台車と、この台車上に設けた2台の6軸多関節ロボットを備え、前記加熱機構は、一方の6軸多関節ロボットのハンドに装着した表面側加熱部と、他方の6軸多関節ロボットのハンドに装着した裏面側加熱部とから成っている構成とすることができる。
この際、表面側加熱部を装着した一方の6軸多関節ロボット及び裏面側加熱部を装着した他方の6軸多関節ロボットを一組のロボットユニットとして、このロボットユニットを複数組配置することも可能である。
【0008】
さらに、本発明の請求項4に係る曲げ加工装置のように、前記台車は、金属板載置部を跨る門型を成し、前記6軸多関節ロボットを前記門型台車の横梁に沿って移動させるロボット駆動機構を備えている構成としてもよい。
ここで、6軸多関節ロボットを門型台車の横梁に沿って移動させるロボット駆動機構としては、とくに限定はしないが、モータ出力をラック&ピニオン方式でロボットに伝達するようにした構造が簡易な駆動機構を採用することが望ましい。
【0009】
本発明の曲げ加工装置は、金属板の曲げ加工場において単独で設置してもよいが、従来周知の曲げ加工装置に併設することが望ましく、この場合には、まず、金属板載置部にセットした金属板の中央部に対して既存の曲げ加工装置によって曲げ加工を施した後、本発明の曲げ加工装置の加熱機構により金属板の端部を表裏側から加熱すれば、金属板の中央部は勿論のこと、端部においてもしわなく曲がることになるので、面倒なしわの矯正作業を必要としない分だけ、生産効率が向上することとなる。
【発明の効果】
【0010】
本発明の請求項1に係る曲げ加工装置では、上記した構成としているので、金属板載置部にセットした金属板の端部を加熱機構によって表裏側から加熱することで、端部に対してしわを生じさせることなく曲げ加工を施すことができ、したがって、従来必要としていた端部のしわを直す矯正作業を行わなくて済む分だけ、生産効率の向上を実現することが可能であるという非常に優れた効果がもたらされる。
【0011】
また、本発明の請求項2〜4に係る曲げ加工装置では、上記した構成としたため、金属板の端部を加熱機構によって表裏側から加熱するに際して、金属板の細かな形状(曲率)変化に対応することができるという非常に優れた効果がもたらされる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る曲げ加工装置の一実施例を示す既存の曲げ加工装置に併設した状況における部分平面説明図である。
【図2】図1に示した曲げ加工装置の部分側面説明図である。
【図3】図1に示した曲げ加工装置の半割正面図及び既存の曲げ加工装置の半割正面図を合わせて表した説明図(a)及び曲げ加工装置の加熱機構部位における部分拡大説明図である。
【図4】図1における曲げ加工装置の6軸多関節ロボットの位置関係を示す斜視説明図である。
【発明を実施するための形態】
【0013】
以下、本発明に係る曲げ加工装置を図面に基づいて説明する。
図1〜図4は、本発明に係る曲げ加工装置の一実施例を示しており、この実施例では、本発明に係る曲げ加工装置を既存の曲げ加工装置に併設した場合を例に挙げて説明する。
図1及び図2に示すように、既存の曲げ加工装置1は、金属板である鋼板Wが搬入されてセットされる金属板載置部2と、この金属板載置部2の両側(図1上下側)に沿って配置したレール3と、金属板載置部2に跨って設けられてレール3上をラック&ピニオン方式で走行する門型台車4と、この門型台車4の横梁4a上を往復移動して鋼板Wの適宜部位において表面側から加熱して曲げる中焼き加熱ヘッド6を備えている。
【0014】
この既存の曲げ加工装置1に併設した本実施例に係る曲げ加工装置10は、上記した金属板載置部2及びレール3を使用するものとしており、金属板載置部2に跨って設けられて門型台車4と同じくレール3上をラック&ピニオン方式で走行する門型台車14と、この門型台車14の横梁14aに上下方向7に並べて配置されて、図2における拡大円内に示すように、横梁14aに設置したリニアガイド15にスライダ16を係合させることで横梁14aに沿ってそれぞれ移動可能とした2台の6軸多関節ロボット17,18と、金属板載置部2上にセットした鋼板Wの端部における適宜部位を表裏側から加熱して曲げる加熱機構20を備えている。
【0015】
この場合、加熱機構20は、図3及び図4にも示すように、上側に位置する6軸多関節ロボット17のハンド17aに装着されて鋼板Wの端部における適宜部位を表側から加熱する表面側加熱部21と、下側に位置する6軸多関節ロボット18のハンド18aに装着されて鋼板Wの端部における適宜部位を裏側から加熱する裏面側加熱部22とを具備している。
【0016】
そして、これらの表面側加熱部21及び裏面側加熱部22を保持する6軸多関節ロボット17,18は、モータ11の出力軸に装着したピニオン12及びこのピニオン12と噛み合うラック13を具備したロボット駆動機構19により伝達されるモータ11の出力によって駆動されるものとなっている。
つまり、門型台車14及び2台の6軸多関節ロボット17,18を駆動すると共に、これらの6軸多関節ロボット17,18自身を動作させることで、加熱機構20の表面側加熱部21及び裏面側加熱部22を水平方向及び垂直方向に移動させることができるようにしてあり、これにより、金属板載置部2上にセットした鋼板Wの端部におけるすべての部位をカバーすることができるようにしてある。
【0017】
次に、上記した本実施例に係る曲げ加工装置10の動作を説明する。
まず、本実施例に係る曲げ加工装置10が併設された既存の曲げ加工装置1を動作させて、金属板載置部2に搬入されてセットされた鋼板Wの中央部における必要部位に中焼き加熱ヘッド6を順次移動させて、その部位毎に加熱冷却を繰り返して曲げ加工を施し、鋼板Wの中央部を所定形状に湾曲させる。
【0018】
次いで、本実施例に係る曲げ加工装置10の門型台車14及び下側の6軸多関節ロボット18を駆動して、この6軸多関節ロボット18を所定の部位に移動させるのに続いて、この6軸多関節ロボット18自身を動作させて裏面側加熱部22を装着したハンド18aにあらかじめティーチングした姿勢をとらせると共に、金属板載置部2にセットされた鋼板Wの端部の裏側に裏面側加熱部22を移動させて鋼板Wの端部に接触させる。
【0019】
この後、上側の6軸多関節ロボット17を駆動して所定の部位に移動させるのに続いて、この6軸多関節ロボット17自身を動作させて表面側加熱部21を装着したハンド17aにあらかじめティーチングした姿勢をとらせると共に、図3(b)に実線で示すようにして表面側加熱部21を金属板載置部2にセットされた鋼板Wの端部の表側に接触させ、この状態で加熱することにより曲げ加工を行う。
【0020】
そして、この部位における曲げ加工が終了した時点で、6軸多関節ロボット17,18をそれぞれ動作させて、図3(b)に仮想線で示すように、ハンド17aに装着した表面側加熱部21を湾曲している鋼板Wの端部から離間させるべく上昇させると共に、18aに装着した裏面側加熱部22を鋼板Wの端部から離間させ、6軸多関節ロボット17,18を互いの干渉を避けつつ次の加工部位にそれぞれ移動させる。
【0021】
このように、金属板載置部2にセットした鋼板Wの中央部に対して既存の曲げ加工装置1によって曲げ加工を施した後、本実施例による曲げ加工装置10により鋼板Wの端部を表裏側から加熱すれば、鋼板Wの中央部は言うまでもなく、端部においてもしわなく曲がることになるので、面倒なしわの矯正作業を必要としない分だけ、生産効率が向上することとなる。
【0022】
また、本実施例による曲げ加工装置10では、加熱機構20が、上側の6軸多関節ロボット17のハンド17aに装着した表面側加熱部21と、下側の6軸多関節ロボット18のハンド18aに装着した裏面側加熱部22を具備した構成としていることから、上記のように鋼板Wの端部を表裏側から加熱するに際して、鋼板Wの細かな形状(曲率)変化に対応し得ることとなる。
【0023】
上記したように、この実施例では、本発明に係る曲げ加工装置を既存の曲げ加工装置1に併設した場合を例に挙げて説明したが、曲げ加工場において、本発明に係る曲げ加工装置を単独で設置することも可能である。
また、上記した実施例では、加熱機構20の表面側加熱部21及び裏面側加熱部22を2台の6軸多関節ロボット17,18の各ハンド17a,18aに分けて装着した構成としているが、これに限定されるものではなく、他の構成として、例えば、クランプタイプの加熱機構を採用して、このクランプタイプの加熱機構を1台の6軸多関節ロボットのハンドに装着するようにしてもよい。
【0024】
さらに、上記した実施例による曲げ加工装置10では、加熱機構20の表面側加熱部21を装着した一方の6軸多関節ロボット17及び裏面側加熱部22を装着した他方の6軸多関節ロボット18を備えている構成としているが、これらの6軸多関節ロボット17,18を一組のロボットユニットとして、このロボットユニットを複数組配置することも可能である。
【0025】
さらまた、上記した実施例による曲げ加工装置10では、門型台車14及び6軸多関節ロボット17,18の駆動機構としてラック&ピニオン方式を採用しているが、これに限定されるものではなく、本発明に係る曲げ加工装置の他の構成も、上記した実施例による曲げ加工装置10の構成に限定されるものではない。
【符号の説明】
【0026】
2 金属板載置部
10 曲げ加工装置
11 モータ(ロボット駆動機構)
12 ピニオン(ロボット駆動機構)
13 ラック(ロボット駆動機構)
14 門型台車
14a 横梁
17,18 6軸多関節ロボット
17a,18a ロボットのハンド
19 ロボット駆動機構
20 加熱機構
21 表面側加熱部
22 裏面側加熱部
【特許請求の範囲】
【請求項1】
金属板の端部に曲げ加工を施す曲げ加工装置であって、
前記金属板を載置して支持する金属板載置部と、
水平方向及び垂直方向に移動可能に設けられて、前記金属板載置部上にセットした金属板の端部における適宜部位を表裏側から加熱して曲げる加熱機構を備えている
ことを特徴とする曲げ加工装置。
【請求項2】
前記金属板載置部に沿って移動する台車と、この台車上に設けた6軸多関節ロボットを備え、前記加熱機構は、前記6軸多関節ロボットのハンドに装着してある請求項1に記載の曲げ加工装置。
【請求項3】
前記金属板載置部に沿って移動する台車と、この台車上に設けた2台の6軸多関節ロボットを備え、前記加熱機構は、一方の6軸多関節ロボットのハンドに装着した表面側加熱部と、他方の6軸多関節ロボットのハンドに装着した裏面側加熱部とから成っている請求項1に記載の曲げ加工装置。
【請求項4】
前記台車は、金属板載置部を跨ぐ門型を成し、前記6軸多関節ロボットを前記門型台車の横梁に沿って移動させるロボット駆動機構を備えている請求項2又は3に記載の曲げ加工装置。
【請求項1】
金属板の端部に曲げ加工を施す曲げ加工装置であって、
前記金属板を載置して支持する金属板載置部と、
水平方向及び垂直方向に移動可能に設けられて、前記金属板載置部上にセットした金属板の端部における適宜部位を表裏側から加熱して曲げる加熱機構を備えている
ことを特徴とする曲げ加工装置。
【請求項2】
前記金属板載置部に沿って移動する台車と、この台車上に設けた6軸多関節ロボットを備え、前記加熱機構は、前記6軸多関節ロボットのハンドに装着してある請求項1に記載の曲げ加工装置。
【請求項3】
前記金属板載置部に沿って移動する台車と、この台車上に設けた2台の6軸多関節ロボットを備え、前記加熱機構は、一方の6軸多関節ロボットのハンドに装着した表面側加熱部と、他方の6軸多関節ロボットのハンドに装着した裏面側加熱部とから成っている請求項1に記載の曲げ加工装置。
【請求項4】
前記台車は、金属板載置部を跨ぐ門型を成し、前記6軸多関節ロボットを前記門型台車の横梁に沿って移動させるロボット駆動機構を備えている請求項2又は3に記載の曲げ加工装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−269316(P2010−269316A)
【公開日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願番号】特願2009−120826(P2009−120826)
【出願日】平成21年5月19日(2009.5.19)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(502422351)株式会社アイ・エイチ・アイ マリンユナイテッド (159)
【公開日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願日】平成21年5月19日(2009.5.19)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(502422351)株式会社アイ・エイチ・アイ マリンユナイテッド (159)
[ Back to top ]