
書込み同期化修正のための時間シフト・ビット
【課題】磁気記憶媒体及びその対応する書込み可能磁気ビット即ちドットに関連する磁気記憶装置の書込み同期化を修正するためのシステム及び方法を提供すること。
【解決手段】磁気記憶媒体及びその対応する書込み可能磁気ビット即ちドットに関連する磁気記憶装置の書込み同期化を修正するためのシステム及び方法が提供される。詳細には、これらのシステム及び方法には、磁気記憶装置を較正し、それにより読取り−書込みタイミングのスロー・ドリフトを修正するための時間シフト原理の使用が包含されている。時間シフト技法は、様々な方法で適用することができることを理解されたい。たとえば、磁気記憶媒体上の正にそのドットを時間シフト方式で配置することができる。他の実施例では、ドットへの書込みを時間シフトさせることができる。
【解決手段】磁気記憶媒体及びその対応する書込み可能磁気ビット即ちドットに関連する磁気記憶装置の書込み同期化を修正するためのシステム及び方法が提供される。詳細には、これらのシステム及び方法には、磁気記憶装置を較正し、それにより読取り−書込みタイミングのスロー・ドリフトを修正するための時間シフト原理の使用が包含されている。時間シフト技法は、様々な方法で適用することができることを理解されたい。たとえば、磁気記憶媒体上の正にそのドットを時間シフト方式で配置することができる。他の実施例では、ドットへの書込みを時間シフトさせることができる。
【発明の詳細な説明】
【背景技術】
【0001】
磁気記憶装置は、磁気記憶媒体上に磁気データを書き込み、且つ、磁気記憶媒体上から磁気データを読み取る変換器を使用して該磁気記憶媒体上にデータを記憶するために使用されている。たとえば、ディスク記憶装置は、通常、磁気記録ディスクを高速回転させるためのスピンドル・モータの上に同軸で取り付けられた1つ又は複数の磁気記録ディスクと共に動作するようにされている。ディスクが回転すると、対応する変換器即ち読取り/書込みヘッドがアクチュエータ・アセンブリによってディスクの表面上を移動し、それによりディスク上のデジタル情報が読み取られ、且つ、ディスク上にデジタル情報が書き込まれる。
【0002】
増加する一方のデジタル情報量を記憶する一般的な要求に鑑みて、磁気記憶装置の設計者及び製造者は、磁気記憶媒体のビット密度を高くするべく絶えず試行している。磁気記録ディスクの場合、これは、面密度が高くなること、つまりディスク上のトラックの数が増加すること、及び/又は所与のトラックに沿ったビットの線密度が高くなることを意味している。面密度が高くなっている方法の1つには、ビット・パターン化媒体(BPM)の使用が包含されている。
【0003】
BPMの場合、磁気記録表面がパターン化されており、互いに分離された多数の離散単一定義域磁気島(一般的には1ビット当たり1つの島)を提供している。ビットの分離は、データをビットに記録している間、また、ビットからデータをリードバックしている間、それらの間の交換結合を著しく制限している。したがってBPMを使用し、且つ、ビットとビットの間の干渉を防止することにより、ビットを互いに近接して配置することができる。サーボ情報は、サーボ制御システムに位置決め情報を提供するために、しばしばBPM上に含まれている。そのためには、BPM上への書込み動作の間、所与のデータ・アレイ、たとえばデータ・トラックの真上に書込みヘッド又は記録ヘッドを正確に配置し、そのデータ・トラック上のビットを磁化することができる。このようなビットは、しばしばドットと呼ばれている。したがって、たとえば磁気記録ディスクが回転している間、データ記録プロセス及びデータ・リードバック・プロセスを容易にするために、ヘッドが通過するドットの真上にヘッドを慎重に位置合せすることができる。
【0004】
しかしながら、ヘッドとディスク・ドットとの間のこのような総体的位置合せを使用したとしても、BPMは、ディスク駆動操作に対するさらなる課題を抱えている。これらの課題のうちの1つには、ディスク記憶装置の書込みタイミングとディスク及びそれらの既存のドットとの同期化がある。予備モデル化の結果によれば、首尾よくディスクに書き込むための窓は、通常、ビットの長さの30%以内であることが分かる。総体密度が6.45平方センチ(1平方インチ)当たり1テラビットである場合、このような30%の長さは、約4nmに相当している。これは、駆動操作のRPM及び半径に応じて、さらに、10ps程度の書込み周期に相当している。したがって総体書込み動作は、ディスク記憶装置にフィードバックするための限られた機会を許容している。さらに、書込みヘッド(即ちライタ)は、それ自体によって位置フィードバックを提供することはできないことは広く認識されている。つまり、ライタは、ディスク上の「書込み可能」ドットに対するその位置を登録するためのセンサとしては機能していない。したがって、書込みタイミング同期化の修正を容易にするためのセンサ装置を配置する課題、及びディスク記憶システムに位置情報のフィードバックを適宜提供する課題が存在している。本発明の実施例の目的は、これらの課題に対処することである。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の特定の実施例によれば、磁気記憶媒体及びその対応する書込み可能磁気ビット即ちドットに関連する磁気記憶装置の書込み同期化の修正に関するシステム及び方法が提供される。詳細には、これらのシステム及び方法は、書込みタイミングのスロー・ドリフトを修正するための磁気記憶装置の較正に関している。特定の実施例では、磁気記憶媒体は磁気記憶ディスクであってもよく、したがって同期化には、ディスク上のドットに関連する時間シフト原理の使用が包含されている。
【課題を解決するための手段】
【0006】
時間シフト技法は、様々な方法で適用することができることを理解されたい。たとえば、いくつかの実施例では、磁気記憶媒体上の正にそのドットを時間シフト方式で配置することができる。このような実施例は、磁気記憶ディスクを包含している場合、ドットが複数のグループ又はクラスタでディスクのデータ・アレイ内に提供されるようなドットの製造を包含することができる。したがって、データ・アレイ内にドット・グループを書き込む場合、特定のドット・グループのみが書き込まれる。引き続いて、次にドット・グループを読み取る場合、磁気記憶装置の制御システムを使用して、書き込まれたグループ及び書き込まれなかったグループを弁別することができる。さらに、磁気記憶装置の書込み同期化を修正する場合、制御システムは、ドット・グループを計数器として集合的に使用し、アレイに将来的に記録するためのデータ・アレイのドット・グループに関連する書込みプロセスを前又は後にシフトさせることができる方法を容易にすることができる。
【0007】
いくつかの他の実施例では、たとえばドットへの書込みを時間シフトさせることができる。このような実施例は、ドットがディスクの個々のデータ・アレイ内で一様に間隔を隔てるようなドットの製造を包含することができる。したがって、データ・アレイ内のドットに関連する書込みタイミングを多数の書込み反復にわたってシフトさせると、アレイのドットに関連する書込みが個々の書込み反復によって全く別のものになる。書き込まれたドットを個々の書込み反復に引き続いて読み取る場合、磁気記憶装置の制御システムを使用して、ドットに関連する最も小さい書込み位置決め誤差をもたらした書込みタイミングを決定することができる。制御システムは、このような決定に引き続いて、アレイに将来的に記録するためのデータ・アレイのドットに関連する書込みプロセスの前又は後のシフトにおける最も小さい書込み誤りに対応する時間シフトを使用することができる。
【0008】
これら及び他の様々な特徴並びに利点については、以下の詳細な説明を読むことによって明らかになるであろう。
【図面の簡単な説明】
【0009】
【図1】本発明の特定の実施例による磁気記憶装置の平面図である。
【図2】本発明の特定の実施例による磁気記憶媒体のデータ・ビット・パターンの平面図である。
【図3】本発明の特定の実施例によるサーボ制御システムのブロック図である。
【図4】本発明の特定の実施例による書込み時間同期化を修正する例示的方法に使用される磁気記憶媒体の一部上のデータ・アレイの平面図である。
【図5】本発明の特定の実施例による書込みプロセスが実施された後の図4のデータ・アレイの平面図である。
【図6】本発明の特定の実施例による図4の磁気記憶媒体に対応する書込み同期化を修正する例示的方法のステップを示す流れ図である。
【図7】本発明の特定の実施例による書込み同期化を修正する他の例示的方法に使用される磁気記憶媒体の一部の上のデータ・アレイの平面図である。
【図8】本発明の特定の実施例による書込みプロセスに後続する図7のデータ・アレイの平面図である。
【図9】本発明の特定の実施例による図7の磁気記憶媒体に対応する書込み同期化を修正する他の例示的方法のステップを示す流れ図である。
【発明を実施するための形態】
【0010】
以下の詳細な説明は、図面を参照して読むべきものであり、異なる図面に示されている同様の構成要素には全く同じ数字が振られている。図面に示されている実施例は、特に言及されていない限り、必ずしもスケール通りには描かれていない。図面に示され、且つ、本明細書において説明されている実施例は、単に実例を示すためのものにすぎず、本発明をこれらのいずれかの実施例に限定することを意図したものではないことは理解されよう。一方、これらの実施例には、特許請求の範囲によって定義されている本発明の範囲に含むことができる代替形態、変更態様及び等価物を包含することが意図されている。たとえば、本明細書において説明されている実施例には、磁気記憶装置及びパターン化磁気媒体が包含されているが、これらの実施例は、あらゆる記録記憶装置及び/又はあらゆるパターン化記録媒体にも正しく適用することができる。
【0011】
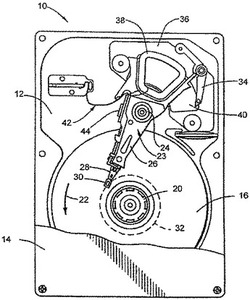
図1は、本発明の特定の実施例による磁気記憶装置10の平面図である。図に示されている実施例では、磁気記憶装置10は、ユーザ・データを磁気的に記憶し、且つ、検索するためにホスト・コンピュータとインタフェースするように使用されるタイプのディスク・ドライブの形態を取っている。ディスク・ドライブは、ベース12に取り付けられた様々なコンポーネントを備えている。頂部カバー14(部分切欠き方式で示されている)はベース12と協同して、ディスク・ドライブのための内部密閉環境を形成している。
【0012】
磁気記憶装置10は、データを記録するための磁気記憶媒体を備えている。図1に示されている実施例では、磁気記憶媒体は、回転方向22に一定の速度で回転させるためのスピンドル・モータ(一括して20で示されている)に取り付けられた、軸方向に整列した複数の磁気記録ディスク16の形態を取っている。ディスク16に隣接して配置されているベアリング軸アセンブリ24の周りを回転するアクチュエータ23は、データをディスク16上のトラック(示されていない)に書き込み、且つ、トラックからデータを読み取るために使用される。
【0013】
アクチュエータ23は、複数の剛直アクチュエータ・アーム26を備えている。フレキシブル・サスペンション・アセンブリ28は、アクチュエータ・アーム26の遠位端に取り付けられており、変換器30(たとえば読取りヘッド及び書込みヘッド)の対応するアレイを支持している。変換器30のうちの1つは、個々のディスク表面に隣接している。変換器30の各々は、関連するディスク16の対応する表面に近接して浮動するように設計されたスライダ・アセンブリ(個別には示されていない)を備えている。ディスク・ドライブ10が非活動化されると、変換器30は、外部ストップ32及び磁気ラッチ34にかかり、アクチュエータ23を固着する。
【0014】
ボイス・コイル・モータ(VCM)36は、アクチュエータ23を移動させるために使用されており、アクチュエータ・コイル38及び永久磁石40を備えている。コイル38に電流が印加されると、ピボット・アセンブリ24の周りのアクチュエータ23の回転が誘導される。フレックス回路アセンブリ42は、アクチュエータ23と、ベース12の下面に取り付けられたディスク・ドライブ印刷回路基板アセンブリ(PCBA)との間の電気通信経路を提供している。フレックス回路アセンブリ42は、データを読み取り、且つ、データを書き込むための電流を変換器30に印加する前置増幅器/ドライバ回路44を備えている。
【0015】
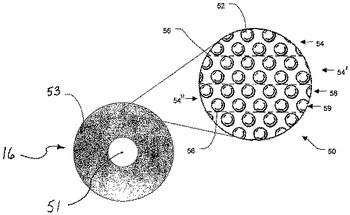
図2は、1つの磁気記憶ディスク16の平面図であり、本発明の特定の実施例によるデータ・ビット・パターン50を示す領域が拡大されている。磁気記憶ディスク16は、ビット・パターン化媒体(BPM)として示されており、データ・ビット・パターンには、互い違いビット・パターンで編成された複数の個別及び離散記録ビット即ちドット52が含まれている。BPMは、通常、非磁気基板を備えており、いくつかの実施例によれば、基板と磁気層との間の1つ又は複数の中間層と共に垂直異方性の磁気記録層が非磁気基板の上を覆っている。磁気層は、たとえばリソグラフィ・パターニング又は自己組織化微粒子アレイを介して離散及び個別ドット52が形成されるようにパターン化されている。いくつかの実施例では、磁気記憶ディスク16は、磁気記憶装置内への取付けに先立ってDC消去される。
【0016】
ドット52は、ディスク16全体に展開しており、複数のデータ・アレイに分割されている。特定の実施例では、図に示されているように、データ・アレイは、同心状に間隔を隔てたデータ・トラック、たとえば、境界をなしているダッシュ線56によってそれぞれ画定された、ディスクの半径に概ね垂直のデータ・トラック54、54’及び54”の形態を取ることができる。データ・アレイは、この実施例では同心のデータ・トラックを磁気記憶媒体中に備えているが、他のデータ記憶媒体に提供される場合、データ・アレイは、代替構成及び幾何構造を有することができることを理解されたい。
【0017】
図2をさらに参照すると、この実施例のデータ・アレイの各々は、ディスク全体に展開している複数の互い違いのドット52を備えている。例示的に示されているデータ・アレイは、互い違いの2ビット幅のドット・パターンを備えており、データ・アレイの各々は、少なくともドット52の第1のグループ58及びドット52の第2のグループ59を有しているが、このような実施例に本発明を限定してはならない。特定の実施例では、第1のグループ58には一連の外径ドット52が包含されており、また、第2のグループ59には一連の内径ドット52が包含されている。図2に示されているデータ・アレイは、2ビット幅のデータ・アレイとして示されているが、いくつかの実施例によれば、2ビットより広いアレイにすることも可能であることが企図されている。
【0018】
図2のデータ・アレイは、さらに、変換器30によって磁化された、データを記録するための複数の記録ビットを有する1つ又は複数のデータ・セクタに編成されている。「記録ビット」という用語は、本明細書においてはドット52を表すために使用されており、変換器、たとえば1つ又は複数の読取り/書込みヘッドは、たとえばコンピュータ・オペレーティング・システムから記憶装置へ経路指定されたデータ(本明細書においては「ユーザ・データ」と呼ばれている場合もある)などのデータを繰返し記録及び/又は上書きすることができる。一方、位置情報は、「サーボ」セクタ又はサーボ・ビット(図示せず)の中に最初に記録することができるが、通常は、記録ビットの中にデータが記録される方法と同じ方法ではサーボ・ビットの中に繰返し記録及び/又は上書きされない。サーボ・セクタは、セクタ及びトラック識別コード並びにヘッドの位置をデータ・トラックの中心の真上に維持するために使用されるサーボ・バースト・パターンを含むことができる。
【0019】
磁気記憶装置は、通常、正確に、且つ、高い信頼性でデータを記録し、且つ、読み取るための制御システムを備えている。たとえば、図1に例示されている磁気記憶装置10などのディスク記憶装置は、通常、それらに関連する磁気記録ディスク16の表面全体にわたる変換器30の運動を制御するための閉ループ・サーボ制御システム(目に見える形では示されていない)を備えている。たとえば、図1及び図2を参照すると、複数の磁気記録ディスク16のうちの1つの磁気記録ディスク上の特定のデータ・アレイ(たとえばデータ・トラック54)へのデータの信頼性の高い書込みを容易にし、且つ、このようなデータ・アレイからのデータの信頼性の高い読取りを容易にするために、関連する変換器30は、通常、データ・アレイが変換器30の下方を移動する際に、データ・アレイの中心の真上に配置される。サーボ制御システムは、1つの動作の間、変換器30を配置するために、通常、最初にシーク機能を実行し、それにより変換器30がその現在位置から特定のデータ・アレイへ移動する。データ・アレイが目的位置に到達すると、サーボ制御システムは次にトラッキング機能を実行し、それにより変換器30の位置がモニタされ、且つ、変換器30が確実にデータ・アレイを追従するように調整される。
【0020】
引き続き上記実施例について説明すると、サーボ制御システムは、通常、対応するディスク16上の1つ又は複数のサーボ・セクタの真上を変換器30が通過する際の変換器の位置を示すサーボ情報信号を変換器30から受け取っている。サーボ制御システムは、次に、受け取ったサーボ情報信号を処理して変換器30の現在位置及び運動を決定し、必要に応じて変換器30の位置を調整する。図1に例示されている磁気記憶装置10などのディスク記憶装置には、通常、個別のディスクがサーボ情報を記憶するための専用ディスクである専用サーボ・システム、或いはサーボ・セクタが単一のディスク上のデータ・セクタとデータ・セクタの間に配置される埋込みサーボ・システムのうちのいずれかが使用されている。サーボ・セクタは、セクタ及びアレイ識別コード並びに変換器の位置をデータ・アレイの中心の真上に維持するために使用されるサーボ・バースト・パターンを含むことができる。
【0021】
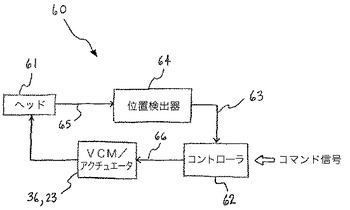
図3は、本発明の特定の実施例によるサーボ制御システム60の機能ブロック図を示したものである。図2を参照して上で説明したように、サーボ制御システム60は、読取り/書込み機能を備えた1つ又は複数のヘッド61を個々に有する1つ又は複数の変換器30のための位置制御が提供されるよう、ディスク記憶装置10を使用して動作させることができる。読取りヘッド及び書込みヘッドは、本明細書においては個別に言及されているが、このような言及は、単に分かり易くすることを目的として実施されたものにすぎない。したがって本発明の実施例をこのような言及に限定してはならない。そうではなく、このようなヘッドは、読取り能力及び書込み能力の両方を有する単一ボディを包含することができ、或いは互いにオフセットした、一方のボディが読取り機能を有し、また、もう一方のボディが書込み機能を有する個別のボディを包含することができることを理解されたい。
【0022】
引き続いて図3を参照すると、サーボ制御システム60は、本発明の特定の実施例によれば、通常、ホスト・システム(たとえばパーソナル・コンピュータ)からコマンド信号を受け取り、且つ、サーボ位置検出器64から1つ又は複数の位置信号63を受け取るコントローラ62(たとえばデジタル信号プロセッサ)を備えている。サーボ位置検出器64は、特定の実施例では、ヘッド61からリードバック信号65を受け取り、受け取ったリードバック信号65から1つ又は複数の位置信号63を抽出し、或いは生成している。引き続いて、コントローラ62は、1つ又は複数の位置信号63及びホスト・システムからのすべてのコマンド信号を処理し、且つ、対応する制御信号66をVCM36に送り、アクチュエータ23及び変換器30又はヘッド61を移動させる。
【0023】
上で説明したように、本発明の実施例は、磁気記憶媒体及びその上に既に存在しているドットに関連する磁気記憶装置の書込み同期化の修正を対象としている。たとえば、図1及び図2を参照すると、特定の実施例では、磁気記憶装置は、対応するディスク16及びその上に既に存在しているそれらのドット52を備えたディスク記録装置10を包含することができる。すべてのディスク16に関して、上で説明したように、サーボ制御システム60を使用して、アクチュエータ23及び対応する変換器30(読取り/書込みヘッド61)をディスクのデータ・アレイと共に正確に配置することができるが、データ・アレイのドット52に関連するヘッド61の書込みタイミングの同期化は、さらに考慮すべき問題である。
【0024】
上で説明したように、個々の変換器30の書込みヘッド(即ちライタ)は、それ自体によっては位置フィードバックを提供することができないため、読取りヘッド(即ちリーダ)を書込みタイミングを調整するための検出器として使用することが考えられる。しかしながら、とりわけ書込みヘッドはタイミング情報を一切フィードバックしないため、読取りヘッドを書込みタイミングを調整するための検出器として使用するための課題の1つには、リードバック信号と書込みヘッドに関連する書込みタイミング・ゲートとの間の待ち時間を記憶装置システムが処理することができることを如何にして決定するかという問題がある。さらに、リードバック信号から書込みゲート・コントローラまでの回路内における待ち時間は、刻々と変化する可能性がある。これらの変化の原因に応じて、場合によっては、書込み時間同期化を調整するための異なる頻度の較正が必要である。書込みヘッドはセンサではないため、通常、読取りタイミングと書込みタイミングとの間の変化をドライブが如何にして処理し、また、それに応じてドライブが如何にして調整するかは明白ではない。本発明の実施例は、時間シフト原理を書込み同期化修正に適用する際のこれらの制限を克服することを対象としている。
【0025】
本明細書に包含されているシステム及び方法は、読取り−書込みタイミング関係の変化に起因する誤りを修正するための書込み時間較正プロセスとして使用することができることを理解されたい。したがって、タイミング関係が変動していることが分かると、磁気記憶装置は、包含されているシステム/方法のうちの1つを使用して再較正することができる。
【0026】
図1をもう一度参照すると、上で説明したように、フレックス回路アセンブリ42は、アクチュエータ23とPCBA(ディスク・ドライブ・ベース12の下面に取り付けられている)との間の電気インタフェースを提供しており、さらに、データを読み取り、且つ、書き込むための電流を変換器30に印加する前置増幅器/ドライバ回路44を備えている。特定の実施例では、PCBA及び前置増幅器/ドライバ回路44は、本明細書において説明されているように、共同して動作して時間シフト技法を容易にしている。このような時間シフト技法は、磁気記憶装置が休止状態である場合、つまり対応するディスクと共に能動動作していない場合に実行することができる。
【0027】
時間シフト技法は、磁気記憶装置のための書込み同期化を修正するべく様々な方法で適用することができることを理解されたい。たとえば、特定の実施例では、このような修正は、磁気記憶媒体上のドットに関連する時間シフトを包含することができる。図4及び図5は、このタイプの時間シフトの説明を補助するために、本発明の特定の実施例による磁気記憶媒体の一部上のデータ・アレイの平面図をそれぞれ示したものである。図4には、書込みプロセスに先立つデータ・アレイが示されており、一方、図5には、書込みプロセスの後のアレイが示されている。図6は、図4及び図5に対応しており、本発明の特定の実施例による時間シフト方法のための流れ図である。
【0028】
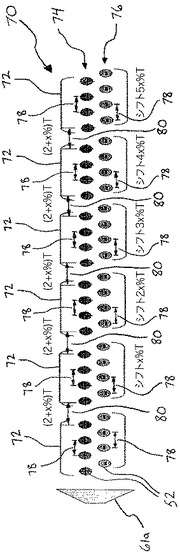
図4を参照すると、図に示されているように、データ・アレイ70のドット52は、複数のグループ72で提供されており、グループ72の各々には複数のドット52が含まれている。特定の実施例では、図に示されているように、グループ72の各々は、例示的に8つのドット52を包含することができるが、本発明をこのような8つのドット52に限定してはならない。個々のグループ72のドット52は、特定の実施例では、1つ又は複数の行で提供することができる。たとえば、図に示されているように、個々のグループ72のドット52は、2つの行、つまり上の行74及び下の行76で提供することができる。図に示されているように、個々のグループ72の隣接するドット52(個々の行74、76の中の)は、第1の距離78だけ間隔を隔てており、一方、データ・アレイ70に沿って隣接しているドット・グループ72は、第2の距離80だけ間隔を隔てている。特定の実施例では、第2の距離80は、偏差、たとえば第1の距離78、たとえば1Tの(2+x%)1Tであってもよい。したがって、一連のドット・グループ72がデータ・アレイ70に沿って一様に提供され、第1の間隔が個々のグループ72の隣接するドット52とドット52の間に使用され、また、第2の間隔が隣接するドット・グループ72とドット・グループ72の間に使用されることになる。特定の実施例では、図4に示されているように、第2の間隔即ち距離80は、第1の間隔即ち距離78より長くなっている。
【0029】
データ・アレイ70の個々のドット52は、正(「+」の表示で示されている)又は負(「−」の表示で示されている)のいずれかに磁化されている。特定の実施例では、図4に示されているように、データ・アレイ70の個々のドット・グループ72の上の行74を正に磁化し、一方、データ・アレイ70の個々のドット・グループ72の下の行76を負に磁化することができる。ドット・グループ72の磁化パターンは、広範囲にわたる様々な任意の形態を取ることができ、本発明の実施例は、このようないかなる形態にも何ら制限されないことを理解されたい。知られているように、ビットは、書込みの際に、その極性即ち磁化が反転する。磁気記憶媒体に記録することができる様々な技法、たとえば垂直方向又は縦方向のいずれかに記録することができる技法が存在しており、当分野では両方の技法が良く知られている。本明細書に提供されている実施例は、記録技法に無関係に適用することができる。
【0030】
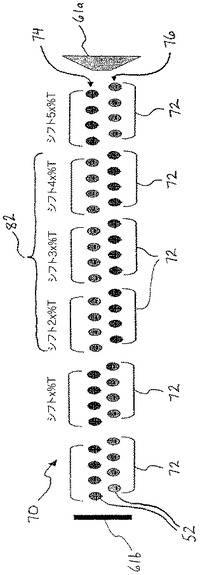
引き続いて図4を参照すると、ドット・グループ72に書き込む際に、書込みヘッド61aは、ドット52の特定の百分率、つまりデータ・アレイ70の特定の書込みタイミング窓の中にのみ書き込むことができる。したがって、特定の実施例では、特定のドット・グループ72のみに書き込むことができる。たとえば、本発明の実施例は、このような書込みには一切限定されないが、初期記録パターンにドット52の連続領域の交番磁化が包含されている場合、書き込まれたドットの磁化は、データ・アレイ70の1セグメントとして反映されることになり、セグメント内のドット52は、それらの反転磁化を有している。図5は、本発明の特定の実施例によるこのような書込みプロセスの後の図4のデータ・アレイ70を示したものである。上で説明したように、オペレーション・システムは、ドットに書き込むための初期パターン(即ち既知のコード列)を知り、特定の書込みタイミング窓82の中に書き込む。したがって、図5に示されているように、窓82の中のこれらのドット・グループ72は、それらの反転磁化、つまり方向がフリップした磁化を有している。
【0031】
さらに図5を参照すると、初期ドット・グループ72から2x%、3x%及び4x%だけシフトしているドット・グループ72に関しては、書込み動作(窓82内の)によって磁化が反転することが例示的に示されている。書込みプロセスに引き続いて、読取りヘッド61bがデータ・アレイ70のドット・グループ72を読み取り、このような読み取った情報を磁気記憶システムの制御システムに転送する。図1〜図3のディスク・ドライブ10及び対応するディスク16を包含している特定の実施例では、このような情報は、フレックス回路アセンブリ42を介してPCBAのコントローラ(たとえばマイクロプロセッサ)に転送される。このような実施例のコントローラは、書込みプロセス後のドット・グループ72の磁化パターンと期待磁化パターンとを比較している。したがってコントローラは、引き続いて、前置増幅器/ドライバ回路44の書込みタイミング・ゲート(図示せず)を介して書込み電流を導くことができ、それにより、対応する同期化修正が書込みタイミングに提供される。特定の実施例では、このような修正は、データ・アレイ70の時間シフト・ドット・グループ72に対する参照に基づいている。たとえば、図5を参照すると、後続するアレイ70への記録のために、書込み電流を−2x%だけ修正することによって書込みプロセスをデータ・アレイ70の第1のドット・グループ72と同相にすることができる。
【0032】
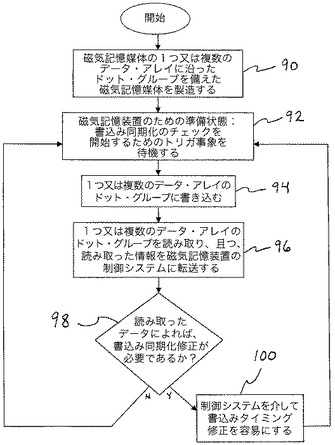
上で説明したように、図6は、図4及び図5を使用して例示的に示されている、本発明の特定の実施例による時間シフト方法のための流れ図である。ステップ90には、ドット・グループ72を備えた磁気記憶媒体を製造するステップが包含されており、それによってこれらのグループ72は、1つ又は複数のデータ・アレイ70に沿って生成される。たとえば図2を参照すると、特定の実施例では、磁気記憶媒体が磁気記録ディスク16である場合、ドット・グループ72は、ディスク16上の同心データ・トラック、たとえば54、54’、等々のうちの1つ又は複数に沿って提供される。図4を参照して上で説明したように、個々のドット・グループ72のドット52並びにドット・グループ72は、それぞれ別様に間隔を隔てている。図4は、1つのデータ・アレイ70及びその上のドット・グループ72を例示的に示したものであるが、特定の実施例では、磁気記憶媒体上の任意の他のデータ・アレイを同様に構築することも可能である。
【0033】
ステップ92には、磁気記憶装置のための準備状態が包含されている。したがってステップ90の磁気記憶媒体が磁気記憶装置にロードされ、その後、必要に応じて、磁気記憶媒体及びそのドットに関連する磁気記憶装置の書込み同期化を修正することができる。磁気記憶装置の書込み同期化に対する修正は、場合によっては、データ・アレイ70に対する書込み機能の実行毎に必ずしも実施する必要はないことを理解されたい。したがって、特定の実施例では、トリガ事象を使用して、その制御システムによる磁気記憶装置の書込み同期化のチェックを開始することができる。したがって、必要に応じて、磁気記憶装置の書込み同期化に関連するチェックの頻度を制御することができる。たとえば、このようなトリガ事象は、データ・アレイ70への書込みが特定の数に到達したことを包含することができる。特定の実施例では、図1のディスク・ドライブ10を参照すると、PCBAコントローラによってこのような書込み量を追跡することができ、書込み動作が特定の数に到達すると、書込み同期化をチェックするよう制御システムに指令が発せられ、流れ図はステップ94へ進行する。
【0034】
ステップ94には、データ・アレイ70のドット・グループ52に書き込むステップが包含されている。このようなステップには、もともと、書込みヘッド61aをデータ・アレイ70の真上に配置するステップが包含されている。特定の実施例では、図1及び図3を参照して上で説明したように、VCM36によって、制御システム60からの信号を介して、対応するアクチュエータ・アーム26が配置される。制御システム60は、読取りヘッド61bがデータ・アレイ70上のサーボ・セクタから読み取った信号からそのキューを得ている。引き続いて、データ・アレイ70のドット・グループ72への書込みを容易にするために、データ・アレイ70の真上にアクチュエータ・アーム26の変換器30を正確に配置することができる。このように配置されると、書込みヘッド61aは、ドット・グループ72への書込みをいつでも開始することができる。上で説明したように、特定の実施例では、書込みヘッド61aは、ディスク・ドライブ10のPCBAのコントローラからそのキューを得ている。PCBAは、フレックス回路アセンブリ42と共同して動作し、前置増幅器/ドライバ回路44からの書込み電流のタイミングを制御している。したがって、特定の実施例では、PCBAのコントローラは、データ・アレイ70のドット・グループ72への初期書込みパターン(既知のコード列)を容易にするために、書込みヘッド61aに信号を転送している。上で説明したように、書込みタイミング窓82の中に存在しているドット・グループ72のみが記録され、その結果、それらの磁化が反転することになる。
【0035】
ステップ96には、データ・アレイ70のドット・グループ72を読み取るステップ、及び読み取った情報を磁気記憶オペレーション・システムに転送するステップが包含されている。特定の実施例では、読取りヘッド61bによってこのような情報が読み取られ、且つ、読取りヘッド61bからディスク・ドライブ10の制御システムへ転送される。上で説明したように、特定の実施例では、フレックス回路アセンブリ42がこのような転送を容易にしており、また、このような転送には、読み取ったデータ信号をディスク・ドライブ10のPCBAコントローラに向けて経路指定するステップが包含されている。
【0036】
ステップ98には、書込み同期化修正が必要であるかどうかを読み取ったデータに基づいて決定するステップが包含されている。特定の実施例では、PCBAコントローラは、書込みプロセスが実行された後に読み取られたドット・グループ72の磁化パターンと、そのドット・グループ72の期待磁化パターンとを比較している。特定の実施例では、このような期待磁化パターンをPCBAコントローラの記憶装置に記憶することができる。読み取った磁化パターンと期待磁化パターンが異なっている場合、書込みタイミング即ち同期化を修正しなければならない。したがって流れ図はステップ100を継続し、それによって書込みタイミング修正が実行される。特定の実施例では、図5を参照して上で説明したように、このような修正は、データ・アレイ70の時間シフト・ドット・グループ72に対する参照に基づいており、PCBAコントローラがこのような修正を容易にしている。このような修正が実行されると、流れ図はステップ92へループ・バックする。一方、書込みタイミングを修正する必要がない場合(たとえば、データ・アレイ70の第1のドット・グループ72で書込みタイミングを開始することが分かると)、流れ図は、ステップ98からステップ92へループ・バックする。
【0037】
上で説明したように、時間シフト技法は、磁気記憶装置のための書込み同期化を修正するべく様々な方法で適用することができる。たとえば、特定の実施例では、このような修正は、磁気記憶媒体上に書き込まれるドットに対する書込みプロセスの時間シフトを包含することができる。図7及び図8は、このタイプの時間シフトの説明を補助するために、本発明の特定の実施例による磁気記憶媒体の一部上のデータ・アレイの平面図をそれぞれ示したものである。図4及び図5に関連して示した上記説明と同様、図7には、書込みプロセスに先立つデータ・アレイが示されており、一方、図8には、1つの時間シフト書込みプロセスの後のアレイが示されている。さらに、図9は、上で説明した図6と同様、図7及び図8に対応しており、本発明の特定の実施例による時間シフト方法のための流れ図である。
【0038】
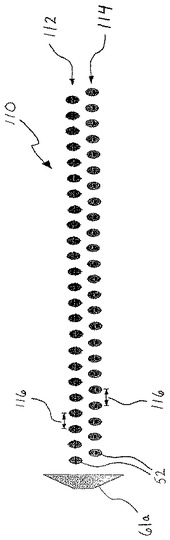
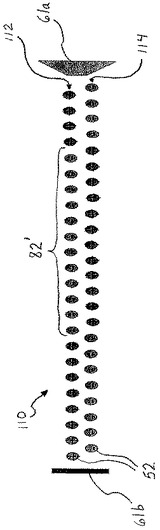
図7を参照すると、データ・アレイ110のドット52は、1つ又は複数の行で提供することができる。たとえば、図に示されているように、ドット52は、上の行112及び下の行114の2つの行で例示的に提供されている。図に示されているように、個々の行112及び114のドット52は、データ・アレイ110の領域に沿って、特定の距離116、たとえば1Tだけ一様に間隔を隔てている。図4のドット52に関連して示した上記説明と同様、データ・アレイ110の個々のドット52は、正(「+」の表示で示されている)又は負(「−」の表示で示されている)のいずれかに磁化されている。特定の実施例では、図7に示されているように、データ・アレイ110の上の行112を正に磁化し、一方、データ・アレイ110の下の行114を負に磁化することができる。しかしながら、図4に関連して示した上記説明と同様、ドット52の磁化パターンは、広範囲にわたる様々な任意の形態を取ることができることを理解されたい。さらに、本明細書において提供されている実施例は、磁気記憶媒体のドット52に記録するために使用される技法に無関係に適用することができる。
【0039】
特定の実施例では、書込みプロセスに関連する複数の時間シフトにわたって、既知のコードがデータ・アレイ110のドット52に書き込まれる。したがって、データ・アレイ110に沿ったドット52に関連するコードの記録は、個々の時間シフト書込みプロセスによって全く異なる独自のものになる。その結果、時間シフトの大きさに応じて、書込みプロセスのほとんどが、データ・アレイ110のドット52に関連するコードの期待書込みパターンからオフセットした書込みパターンをもたらすことになる。したがって、書込みプロセスを時間シフトさせることにより、結果として生じるコードの書込みパターンと、そのコードの期待書込みパターンとを比較することができる。コードの最も小さい書込み位置決め誤差、即ち期待書込みパターンに最も近い位置合せをもたらす時間シフトを決定する場合、磁気記憶装置は、将来の書込みプロセスのために、相応じて、書込みヘッドへの書込み電流をシフトさせるべく引き続いてこのような時間シフトを使用することができる。
【0040】
さらに図7を参照すると、データ・アレイ110のドット52に書き込む場合、書込みヘッド61aは、ドット52の特定の百分率、つまりデータ・アレイ110の特定の書込みタイミング窓の中にのみ書き込むことができる。したがって、図4〜図6に関連して示した上記説明と同様、データ・アレイ110の特定のドット52のみに書き込むことができる。たとえば、本発明の実施例は、このような書込みには一切限定されないが、初期記録パターンにドット52の連続領域の交番磁化が包含されている場合、書き込まれたドットの磁化は、データ・アレイ110の1セグメントとして反映されることになり、セグメント内のドット52は、それらの反転磁化を有している。
【0041】
図8は、本発明の特定の実施例による初期書込みプロセス後の図7のデータ・アレイ110を示したものである。上で説明したように、オペレーション・システムは、ドットに書き込むための初期パターン(既知のコード列)が分かっているが、最初の書込みプロセスのタイミングは、通常、時間シフトされない。例示されているように、書込みヘッド61aは、書込みタイミング窓82’の中に書き込む。したがって、図8に示されているように、窓82’の中に存在しているこれらのドット52のみが、それらの反転磁化、つまり方向がフリップした磁化を有している。初期書込みプロセスに引き続いて、読取りヘッド61bがデータ・アレイ110のドット52を読み取り、このような読み取った情報を磁気記憶システムの制御システムに転送する。図1〜図3のディスク・ドライブ10及び対応するディスク16(及び図4〜図6に関連して説明した構成要素に類似した構成要素)を包含している特定の実施例では、このような情報は、フレックス回路アセンブリ42を介してPCBAのコントローラ(たとえばマイクロプロセッサ)に転送される。このような実施例のコントローラは、初期書込みプロセス後のドット52の書込みパターンと期待書込みパターン(たとえばコントローラの記憶装置に記憶されている)とを比較し、且つ、これらの2つの間に何らかの矛盾、つまり誤りが存在しているかどうかを決定している。誤りが決定される場合、このような誤りは、恐らく初期書込みプロセスに対応しており、コントローラの記憶装置に記憶される。
【0042】
このような書込みプロセスは、必要に応じて、初期書込みプロセスから時間シフトされた他の書込みプロセスを使用して繰り返すことができる。たとえば、特定の実施例では、後続する書込みプロセスは、初期書込みプロセスのx%の書込み時間シフトを有する書込みプロセス、次に初期書込みプロセスの2x%の書込み時間シフトを有する書込みプロセス、次に初期書込みプロセスの3x%の書込み時間シフトを有する書込みプロセス、等々、以下同様の書込み時間シフトを有する書込みプロセスを包含することができる。これらの時間シフト書込みプロセスからの書込みパターンの他の読取りに引き続いて、これらの書込みパターンと期待書込みパターンとの間の書込み位置決め誤差が計算され、且つ、これらの誤りがそれらの対応する書込みプロセス時間シフトと共にPCBAコントローラの記憶装置に記憶される。
【0043】
引き続いて、PCBAコントローラは、前置増幅器/ドライバ回路44の書込みタイミング・ゲート(図示せず)を介して書込み電流を導くことができ、それにより対応する書込み同期化修正が提供される。特定の実施例では、このような修正は、最も小さい誤りをもたらす書込みプロセスの特定の時間シフトに対する参照に基づくことができる。たとえば、初期書込みプロセスの2x%の時間シフトだけ書込みパターンをシフトさせ、対応する書込み位置決め誤差を計算すると、期待書込みパターンと比較した場合、2x%のこのような時間シフト(データ・アレイ110に対する他の時間シフト書込みプロセス又は初期書込みプロセスではなく)によって書込み誤りが最も小さくなることが分かる。したがって、書込み電流を−2x%シフトさせることにより、データ・アレイ110のドット52を備えた期待相に将来の書込みプロセスがもたらされることになる。
【0044】
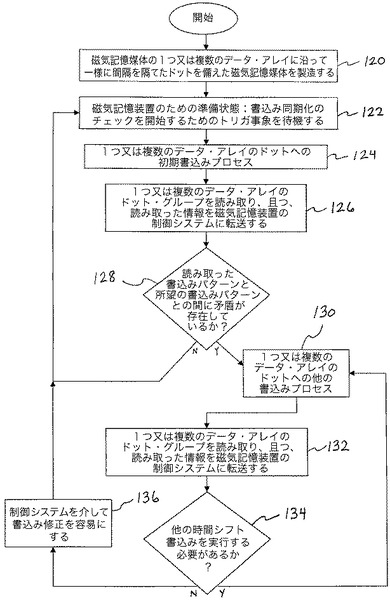
上で説明したように、図9は、図7及び図8を使用して例示的に示されている、本発明の特定の実施例による時間シフト方法のための流れ図である。ステップ120には、1つ又は複数のデータ・アレイ70に沿って生成されたドット52を備えた磁気記憶媒体を製造するステップが包含されている。たとえば、特定の実施例では、図2を参照すると、磁気記憶媒体が磁気記録ディスク16である場合、ドット52は、ディスク16上の同心データ・トラック、たとえば54、54’、等々のうちの1つ又は複数に沿って提供される。図7を参照して上で説明したように、ドット52は一様に間隔を隔てている。図7は、1つのデータ・アレイ70及びその上のドット52を例示的に示したものであるが、特定の実施例では、磁気記憶媒体上の任意の他のデータ・アレイを同様に構築することも可能である。
【0045】
ステップ122には、磁気記憶装置のための準備状態が包含されており、図6に示されているステップ92に関連して説明した内容と同様である。ステップ124には、データ・アレイ110のドット52への初期書込みステップが包含されている。このようなステップには、もともと、書込みヘッド61aをデータ・アレイ110の真上に配置するステップが包含されており、これは、図6に示されているステップ94に関連して示した説明と同様である。このように配置されると、書込みヘッド61aは、ドット52への書込みをいつでも開始することができる。上で説明したように、特定の実施例では、書込みヘッド61aは、ディスク・ドライブ10のPCBAのコントローラからそのキューを得ている。PCBAは、フレックス回路アセンブリ42と共同して動作し、前置増幅器/ドライバ回路44からの書込み電流のタイミングを制御している。したがって、特定の実施例では、PCBAのコントローラは、データ・アレイ70のドット・グループ72に関連する初期書込みパターンを容易にするために、書込みヘッド61aに信号を転送している。上で説明したように、書込みタイミング窓82’の中に存在しているドット・グループ72のみが記録され、その結果、それらの磁化が反転することになる。上で言及したように、初期書込みプロセスに関しては、時間シフトは不要である。
【0046】
ステップ126には、データ・アレイ110のドット52を読み取るステップ、及び読み取った情報を磁気記憶オペレーション・システムに転送するステップが包含されており、これは、図6に示されているステップ96に関連して示した説明と同様である。ステップ128には、初期書込みプロセス後のドット52の書込みパターンと期待書込みパターン(たとえばコントローラの記憶装置に記憶されている)との間に矛盾、つまり書込み位置決め誤差が存在しているかどうかをPCBAコントローラによって決定するステップが包含されている。誤りが決定される場合、このような誤りは、恐らく初期書込みプロセスに対応しており、コントローラの記憶装置にこのようなデータが記録され、流れ図はステップ130へ進行する。しかしながら、誤りが決定されない場合、流れ図はステップ122へループ・バックする。
【0047】
ステップ130には、データ・アレイ110のドット52に対する他の書込みプロセスが包含されている。したがって、上で説明したように、このような他の書込みプロセスには、ステップ124で最初に書き込まれた書込みパターンと同じ書込みパターンの書込みが包含されているが、初期書込みプロセスの既知の時間シフトで書き込まれる。上で説明したように、特定の実施例では、他の書込みプロセスのこの既知の時間シフトは、初期書込みプロセスのx%の書込み時間シフトで開始し、引き続いて、初期書込みプロセスの他の偏差、たとえば2x%、3x%、等々まで連続的に進行することができる。このような偏差は、特定の実施例では、PCBAコントローラの中でプログラムされる。しかしながら、このような偏差は、必要に応じてプログラムすることができ、本明細書において説明されている実施例に限定してはならない。
【0048】
ステップ132には、データ・アレイ70のドット52を読み取るステップ、及び読み取った情報を磁気記憶オペレーション・システムに転送するステップが包含されている(上記ステップ126と同様)。ステップ132はさらに、他の書込みプロセス後のドット52の書込みパターンと期待書込みパターン(たとえばコントローラの記憶装置に記憶されている)との間の何らかの矛盾、つまり書込み位置決め誤差をPCBAコントローラによって決定するステップが包含されている。誤りが決定される場合、このような誤りは、恐らく他の書込みプロセスに対応しており、コントローラの記憶装置にこのようなデータが記録される。
【0049】
ステップ134には、他の時間シフト書込みプロセスを実行する必要があるかどうかを決定するステップが包含されている。特定の実施例では、このような決定は、PCBAコントローラによって提供される。たとえば、特定の実施例では、時間シフト書込み修正の決定を継続するためにシステムがトリガされる前に、特定の量の書込みプロセス反復(たとえばPCBAコントローラの中でプログラムされる)を実行しなければならない(ステップ136)。別法としては、特定の実施例では、初期書込みプロセスの後、タイマー(たとえばPCBAコントローラの一部としての)が起動され、一定の時間期間が経過するとシステムがトリガされて修正の決定を継続する。特定の実施例では、このトリガは、上記パラメータ又は他の同様のパラメータの組合せであってもよい。他の時間シフト書込みプロセスを実行する必要があることが決定されると、流れ図はステップ128へループ・バックし、また、他の時間シフト書込みプロセスを実行する必要がない場合は、流れ図はステップ136へ進行する。
【0050】
ステップ136には、書込み同期化を修正するステップが包含されている。特定の実施例では、図8を参照して上で説明したように、このような修正は、最も小さい書込み位置決め誤差に対応する書込みプロセスの特定の時間シフトに対する参照に基づいており、また、PCBAコントローラがこのような修正を容易にしている。このような修正が実行されると、流れ図はステップ122へループ・バックする。
【0051】
以上、本発明について、開示されている特定の実施例を参照して説明したが、本発明の精神及び範囲を逸脱することなく、形態及び細部に変更を加えることができることは当業者には認識されよう。
【背景技術】
【0001】
磁気記憶装置は、磁気記憶媒体上に磁気データを書き込み、且つ、磁気記憶媒体上から磁気データを読み取る変換器を使用して該磁気記憶媒体上にデータを記憶するために使用されている。たとえば、ディスク記憶装置は、通常、磁気記録ディスクを高速回転させるためのスピンドル・モータの上に同軸で取り付けられた1つ又は複数の磁気記録ディスクと共に動作するようにされている。ディスクが回転すると、対応する変換器即ち読取り/書込みヘッドがアクチュエータ・アセンブリによってディスクの表面上を移動し、それによりディスク上のデジタル情報が読み取られ、且つ、ディスク上にデジタル情報が書き込まれる。
【0002】
増加する一方のデジタル情報量を記憶する一般的な要求に鑑みて、磁気記憶装置の設計者及び製造者は、磁気記憶媒体のビット密度を高くするべく絶えず試行している。磁気記録ディスクの場合、これは、面密度が高くなること、つまりディスク上のトラックの数が増加すること、及び/又は所与のトラックに沿ったビットの線密度が高くなることを意味している。面密度が高くなっている方法の1つには、ビット・パターン化媒体(BPM)の使用が包含されている。
【0003】
BPMの場合、磁気記録表面がパターン化されており、互いに分離された多数の離散単一定義域磁気島(一般的には1ビット当たり1つの島)を提供している。ビットの分離は、データをビットに記録している間、また、ビットからデータをリードバックしている間、それらの間の交換結合を著しく制限している。したがってBPMを使用し、且つ、ビットとビットの間の干渉を防止することにより、ビットを互いに近接して配置することができる。サーボ情報は、サーボ制御システムに位置決め情報を提供するために、しばしばBPM上に含まれている。そのためには、BPM上への書込み動作の間、所与のデータ・アレイ、たとえばデータ・トラックの真上に書込みヘッド又は記録ヘッドを正確に配置し、そのデータ・トラック上のビットを磁化することができる。このようなビットは、しばしばドットと呼ばれている。したがって、たとえば磁気記録ディスクが回転している間、データ記録プロセス及びデータ・リードバック・プロセスを容易にするために、ヘッドが通過するドットの真上にヘッドを慎重に位置合せすることができる。
【0004】
しかしながら、ヘッドとディスク・ドットとの間のこのような総体的位置合せを使用したとしても、BPMは、ディスク駆動操作に対するさらなる課題を抱えている。これらの課題のうちの1つには、ディスク記憶装置の書込みタイミングとディスク及びそれらの既存のドットとの同期化がある。予備モデル化の結果によれば、首尾よくディスクに書き込むための窓は、通常、ビットの長さの30%以内であることが分かる。総体密度が6.45平方センチ(1平方インチ)当たり1テラビットである場合、このような30%の長さは、約4nmに相当している。これは、駆動操作のRPM及び半径に応じて、さらに、10ps程度の書込み周期に相当している。したがって総体書込み動作は、ディスク記憶装置にフィードバックするための限られた機会を許容している。さらに、書込みヘッド(即ちライタ)は、それ自体によって位置フィードバックを提供することはできないことは広く認識されている。つまり、ライタは、ディスク上の「書込み可能」ドットに対するその位置を登録するためのセンサとしては機能していない。したがって、書込みタイミング同期化の修正を容易にするためのセンサ装置を配置する課題、及びディスク記憶システムに位置情報のフィードバックを適宜提供する課題が存在している。本発明の実施例の目的は、これらの課題に対処することである。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の特定の実施例によれば、磁気記憶媒体及びその対応する書込み可能磁気ビット即ちドットに関連する磁気記憶装置の書込み同期化の修正に関するシステム及び方法が提供される。詳細には、これらのシステム及び方法は、書込みタイミングのスロー・ドリフトを修正するための磁気記憶装置の較正に関している。特定の実施例では、磁気記憶媒体は磁気記憶ディスクであってもよく、したがって同期化には、ディスク上のドットに関連する時間シフト原理の使用が包含されている。
【課題を解決するための手段】
【0006】
時間シフト技法は、様々な方法で適用することができることを理解されたい。たとえば、いくつかの実施例では、磁気記憶媒体上の正にそのドットを時間シフト方式で配置することができる。このような実施例は、磁気記憶ディスクを包含している場合、ドットが複数のグループ又はクラスタでディスクのデータ・アレイ内に提供されるようなドットの製造を包含することができる。したがって、データ・アレイ内にドット・グループを書き込む場合、特定のドット・グループのみが書き込まれる。引き続いて、次にドット・グループを読み取る場合、磁気記憶装置の制御システムを使用して、書き込まれたグループ及び書き込まれなかったグループを弁別することができる。さらに、磁気記憶装置の書込み同期化を修正する場合、制御システムは、ドット・グループを計数器として集合的に使用し、アレイに将来的に記録するためのデータ・アレイのドット・グループに関連する書込みプロセスを前又は後にシフトさせることができる方法を容易にすることができる。
【0007】
いくつかの他の実施例では、たとえばドットへの書込みを時間シフトさせることができる。このような実施例は、ドットがディスクの個々のデータ・アレイ内で一様に間隔を隔てるようなドットの製造を包含することができる。したがって、データ・アレイ内のドットに関連する書込みタイミングを多数の書込み反復にわたってシフトさせると、アレイのドットに関連する書込みが個々の書込み反復によって全く別のものになる。書き込まれたドットを個々の書込み反復に引き続いて読み取る場合、磁気記憶装置の制御システムを使用して、ドットに関連する最も小さい書込み位置決め誤差をもたらした書込みタイミングを決定することができる。制御システムは、このような決定に引き続いて、アレイに将来的に記録するためのデータ・アレイのドットに関連する書込みプロセスの前又は後のシフトにおける最も小さい書込み誤りに対応する時間シフトを使用することができる。
【0008】
これら及び他の様々な特徴並びに利点については、以下の詳細な説明を読むことによって明らかになるであろう。
【図面の簡単な説明】
【0009】
【図1】本発明の特定の実施例による磁気記憶装置の平面図である。
【図2】本発明の特定の実施例による磁気記憶媒体のデータ・ビット・パターンの平面図である。
【図3】本発明の特定の実施例によるサーボ制御システムのブロック図である。
【図4】本発明の特定の実施例による書込み時間同期化を修正する例示的方法に使用される磁気記憶媒体の一部上のデータ・アレイの平面図である。
【図5】本発明の特定の実施例による書込みプロセスが実施された後の図4のデータ・アレイの平面図である。
【図6】本発明の特定の実施例による図4の磁気記憶媒体に対応する書込み同期化を修正する例示的方法のステップを示す流れ図である。
【図7】本発明の特定の実施例による書込み同期化を修正する他の例示的方法に使用される磁気記憶媒体の一部の上のデータ・アレイの平面図である。
【図8】本発明の特定の実施例による書込みプロセスに後続する図7のデータ・アレイの平面図である。
【図9】本発明の特定の実施例による図7の磁気記憶媒体に対応する書込み同期化を修正する他の例示的方法のステップを示す流れ図である。
【発明を実施するための形態】
【0010】
以下の詳細な説明は、図面を参照して読むべきものであり、異なる図面に示されている同様の構成要素には全く同じ数字が振られている。図面に示されている実施例は、特に言及されていない限り、必ずしもスケール通りには描かれていない。図面に示され、且つ、本明細書において説明されている実施例は、単に実例を示すためのものにすぎず、本発明をこれらのいずれかの実施例に限定することを意図したものではないことは理解されよう。一方、これらの実施例には、特許請求の範囲によって定義されている本発明の範囲に含むことができる代替形態、変更態様及び等価物を包含することが意図されている。たとえば、本明細書において説明されている実施例には、磁気記憶装置及びパターン化磁気媒体が包含されているが、これらの実施例は、あらゆる記録記憶装置及び/又はあらゆるパターン化記録媒体にも正しく適用することができる。
【0011】
図1は、本発明の特定の実施例による磁気記憶装置10の平面図である。図に示されている実施例では、磁気記憶装置10は、ユーザ・データを磁気的に記憶し、且つ、検索するためにホスト・コンピュータとインタフェースするように使用されるタイプのディスク・ドライブの形態を取っている。ディスク・ドライブは、ベース12に取り付けられた様々なコンポーネントを備えている。頂部カバー14(部分切欠き方式で示されている)はベース12と協同して、ディスク・ドライブのための内部密閉環境を形成している。
【0012】
磁気記憶装置10は、データを記録するための磁気記憶媒体を備えている。図1に示されている実施例では、磁気記憶媒体は、回転方向22に一定の速度で回転させるためのスピンドル・モータ(一括して20で示されている)に取り付けられた、軸方向に整列した複数の磁気記録ディスク16の形態を取っている。ディスク16に隣接して配置されているベアリング軸アセンブリ24の周りを回転するアクチュエータ23は、データをディスク16上のトラック(示されていない)に書き込み、且つ、トラックからデータを読み取るために使用される。
【0013】
アクチュエータ23は、複数の剛直アクチュエータ・アーム26を備えている。フレキシブル・サスペンション・アセンブリ28は、アクチュエータ・アーム26の遠位端に取り付けられており、変換器30(たとえば読取りヘッド及び書込みヘッド)の対応するアレイを支持している。変換器30のうちの1つは、個々のディスク表面に隣接している。変換器30の各々は、関連するディスク16の対応する表面に近接して浮動するように設計されたスライダ・アセンブリ(個別には示されていない)を備えている。ディスク・ドライブ10が非活動化されると、変換器30は、外部ストップ32及び磁気ラッチ34にかかり、アクチュエータ23を固着する。
【0014】
ボイス・コイル・モータ(VCM)36は、アクチュエータ23を移動させるために使用されており、アクチュエータ・コイル38及び永久磁石40を備えている。コイル38に電流が印加されると、ピボット・アセンブリ24の周りのアクチュエータ23の回転が誘導される。フレックス回路アセンブリ42は、アクチュエータ23と、ベース12の下面に取り付けられたディスク・ドライブ印刷回路基板アセンブリ(PCBA)との間の電気通信経路を提供している。フレックス回路アセンブリ42は、データを読み取り、且つ、データを書き込むための電流を変換器30に印加する前置増幅器/ドライバ回路44を備えている。
【0015】
図2は、1つの磁気記憶ディスク16の平面図であり、本発明の特定の実施例によるデータ・ビット・パターン50を示す領域が拡大されている。磁気記憶ディスク16は、ビット・パターン化媒体(BPM)として示されており、データ・ビット・パターンには、互い違いビット・パターンで編成された複数の個別及び離散記録ビット即ちドット52が含まれている。BPMは、通常、非磁気基板を備えており、いくつかの実施例によれば、基板と磁気層との間の1つ又は複数の中間層と共に垂直異方性の磁気記録層が非磁気基板の上を覆っている。磁気層は、たとえばリソグラフィ・パターニング又は自己組織化微粒子アレイを介して離散及び個別ドット52が形成されるようにパターン化されている。いくつかの実施例では、磁気記憶ディスク16は、磁気記憶装置内への取付けに先立ってDC消去される。
【0016】
ドット52は、ディスク16全体に展開しており、複数のデータ・アレイに分割されている。特定の実施例では、図に示されているように、データ・アレイは、同心状に間隔を隔てたデータ・トラック、たとえば、境界をなしているダッシュ線56によってそれぞれ画定された、ディスクの半径に概ね垂直のデータ・トラック54、54’及び54”の形態を取ることができる。データ・アレイは、この実施例では同心のデータ・トラックを磁気記憶媒体中に備えているが、他のデータ記憶媒体に提供される場合、データ・アレイは、代替構成及び幾何構造を有することができることを理解されたい。
【0017】
図2をさらに参照すると、この実施例のデータ・アレイの各々は、ディスク全体に展開している複数の互い違いのドット52を備えている。例示的に示されているデータ・アレイは、互い違いの2ビット幅のドット・パターンを備えており、データ・アレイの各々は、少なくともドット52の第1のグループ58及びドット52の第2のグループ59を有しているが、このような実施例に本発明を限定してはならない。特定の実施例では、第1のグループ58には一連の外径ドット52が包含されており、また、第2のグループ59には一連の内径ドット52が包含されている。図2に示されているデータ・アレイは、2ビット幅のデータ・アレイとして示されているが、いくつかの実施例によれば、2ビットより広いアレイにすることも可能であることが企図されている。
【0018】
図2のデータ・アレイは、さらに、変換器30によって磁化された、データを記録するための複数の記録ビットを有する1つ又は複数のデータ・セクタに編成されている。「記録ビット」という用語は、本明細書においてはドット52を表すために使用されており、変換器、たとえば1つ又は複数の読取り/書込みヘッドは、たとえばコンピュータ・オペレーティング・システムから記憶装置へ経路指定されたデータ(本明細書においては「ユーザ・データ」と呼ばれている場合もある)などのデータを繰返し記録及び/又は上書きすることができる。一方、位置情報は、「サーボ」セクタ又はサーボ・ビット(図示せず)の中に最初に記録することができるが、通常は、記録ビットの中にデータが記録される方法と同じ方法ではサーボ・ビットの中に繰返し記録及び/又は上書きされない。サーボ・セクタは、セクタ及びトラック識別コード並びにヘッドの位置をデータ・トラックの中心の真上に維持するために使用されるサーボ・バースト・パターンを含むことができる。
【0019】
磁気記憶装置は、通常、正確に、且つ、高い信頼性でデータを記録し、且つ、読み取るための制御システムを備えている。たとえば、図1に例示されている磁気記憶装置10などのディスク記憶装置は、通常、それらに関連する磁気記録ディスク16の表面全体にわたる変換器30の運動を制御するための閉ループ・サーボ制御システム(目に見える形では示されていない)を備えている。たとえば、図1及び図2を参照すると、複数の磁気記録ディスク16のうちの1つの磁気記録ディスク上の特定のデータ・アレイ(たとえばデータ・トラック54)へのデータの信頼性の高い書込みを容易にし、且つ、このようなデータ・アレイからのデータの信頼性の高い読取りを容易にするために、関連する変換器30は、通常、データ・アレイが変換器30の下方を移動する際に、データ・アレイの中心の真上に配置される。サーボ制御システムは、1つの動作の間、変換器30を配置するために、通常、最初にシーク機能を実行し、それにより変換器30がその現在位置から特定のデータ・アレイへ移動する。データ・アレイが目的位置に到達すると、サーボ制御システムは次にトラッキング機能を実行し、それにより変換器30の位置がモニタされ、且つ、変換器30が確実にデータ・アレイを追従するように調整される。
【0020】
引き続き上記実施例について説明すると、サーボ制御システムは、通常、対応するディスク16上の1つ又は複数のサーボ・セクタの真上を変換器30が通過する際の変換器の位置を示すサーボ情報信号を変換器30から受け取っている。サーボ制御システムは、次に、受け取ったサーボ情報信号を処理して変換器30の現在位置及び運動を決定し、必要に応じて変換器30の位置を調整する。図1に例示されている磁気記憶装置10などのディスク記憶装置には、通常、個別のディスクがサーボ情報を記憶するための専用ディスクである専用サーボ・システム、或いはサーボ・セクタが単一のディスク上のデータ・セクタとデータ・セクタの間に配置される埋込みサーボ・システムのうちのいずれかが使用されている。サーボ・セクタは、セクタ及びアレイ識別コード並びに変換器の位置をデータ・アレイの中心の真上に維持するために使用されるサーボ・バースト・パターンを含むことができる。
【0021】
図3は、本発明の特定の実施例によるサーボ制御システム60の機能ブロック図を示したものである。図2を参照して上で説明したように、サーボ制御システム60は、読取り/書込み機能を備えた1つ又は複数のヘッド61を個々に有する1つ又は複数の変換器30のための位置制御が提供されるよう、ディスク記憶装置10を使用して動作させることができる。読取りヘッド及び書込みヘッドは、本明細書においては個別に言及されているが、このような言及は、単に分かり易くすることを目的として実施されたものにすぎない。したがって本発明の実施例をこのような言及に限定してはならない。そうではなく、このようなヘッドは、読取り能力及び書込み能力の両方を有する単一ボディを包含することができ、或いは互いにオフセットした、一方のボディが読取り機能を有し、また、もう一方のボディが書込み機能を有する個別のボディを包含することができることを理解されたい。
【0022】
引き続いて図3を参照すると、サーボ制御システム60は、本発明の特定の実施例によれば、通常、ホスト・システム(たとえばパーソナル・コンピュータ)からコマンド信号を受け取り、且つ、サーボ位置検出器64から1つ又は複数の位置信号63を受け取るコントローラ62(たとえばデジタル信号プロセッサ)を備えている。サーボ位置検出器64は、特定の実施例では、ヘッド61からリードバック信号65を受け取り、受け取ったリードバック信号65から1つ又は複数の位置信号63を抽出し、或いは生成している。引き続いて、コントローラ62は、1つ又は複数の位置信号63及びホスト・システムからのすべてのコマンド信号を処理し、且つ、対応する制御信号66をVCM36に送り、アクチュエータ23及び変換器30又はヘッド61を移動させる。
【0023】
上で説明したように、本発明の実施例は、磁気記憶媒体及びその上に既に存在しているドットに関連する磁気記憶装置の書込み同期化の修正を対象としている。たとえば、図1及び図2を参照すると、特定の実施例では、磁気記憶装置は、対応するディスク16及びその上に既に存在しているそれらのドット52を備えたディスク記録装置10を包含することができる。すべてのディスク16に関して、上で説明したように、サーボ制御システム60を使用して、アクチュエータ23及び対応する変換器30(読取り/書込みヘッド61)をディスクのデータ・アレイと共に正確に配置することができるが、データ・アレイのドット52に関連するヘッド61の書込みタイミングの同期化は、さらに考慮すべき問題である。
【0024】
上で説明したように、個々の変換器30の書込みヘッド(即ちライタ)は、それ自体によっては位置フィードバックを提供することができないため、読取りヘッド(即ちリーダ)を書込みタイミングを調整するための検出器として使用することが考えられる。しかしながら、とりわけ書込みヘッドはタイミング情報を一切フィードバックしないため、読取りヘッドを書込みタイミングを調整するための検出器として使用するための課題の1つには、リードバック信号と書込みヘッドに関連する書込みタイミング・ゲートとの間の待ち時間を記憶装置システムが処理することができることを如何にして決定するかという問題がある。さらに、リードバック信号から書込みゲート・コントローラまでの回路内における待ち時間は、刻々と変化する可能性がある。これらの変化の原因に応じて、場合によっては、書込み時間同期化を調整するための異なる頻度の較正が必要である。書込みヘッドはセンサではないため、通常、読取りタイミングと書込みタイミングとの間の変化をドライブが如何にして処理し、また、それに応じてドライブが如何にして調整するかは明白ではない。本発明の実施例は、時間シフト原理を書込み同期化修正に適用する際のこれらの制限を克服することを対象としている。
【0025】
本明細書に包含されているシステム及び方法は、読取り−書込みタイミング関係の変化に起因する誤りを修正するための書込み時間較正プロセスとして使用することができることを理解されたい。したがって、タイミング関係が変動していることが分かると、磁気記憶装置は、包含されているシステム/方法のうちの1つを使用して再較正することができる。
【0026】
図1をもう一度参照すると、上で説明したように、フレックス回路アセンブリ42は、アクチュエータ23とPCBA(ディスク・ドライブ・ベース12の下面に取り付けられている)との間の電気インタフェースを提供しており、さらに、データを読み取り、且つ、書き込むための電流を変換器30に印加する前置増幅器/ドライバ回路44を備えている。特定の実施例では、PCBA及び前置増幅器/ドライバ回路44は、本明細書において説明されているように、共同して動作して時間シフト技法を容易にしている。このような時間シフト技法は、磁気記憶装置が休止状態である場合、つまり対応するディスクと共に能動動作していない場合に実行することができる。
【0027】
時間シフト技法は、磁気記憶装置のための書込み同期化を修正するべく様々な方法で適用することができることを理解されたい。たとえば、特定の実施例では、このような修正は、磁気記憶媒体上のドットに関連する時間シフトを包含することができる。図4及び図5は、このタイプの時間シフトの説明を補助するために、本発明の特定の実施例による磁気記憶媒体の一部上のデータ・アレイの平面図をそれぞれ示したものである。図4には、書込みプロセスに先立つデータ・アレイが示されており、一方、図5には、書込みプロセスの後のアレイが示されている。図6は、図4及び図5に対応しており、本発明の特定の実施例による時間シフト方法のための流れ図である。
【0028】
図4を参照すると、図に示されているように、データ・アレイ70のドット52は、複数のグループ72で提供されており、グループ72の各々には複数のドット52が含まれている。特定の実施例では、図に示されているように、グループ72の各々は、例示的に8つのドット52を包含することができるが、本発明をこのような8つのドット52に限定してはならない。個々のグループ72のドット52は、特定の実施例では、1つ又は複数の行で提供することができる。たとえば、図に示されているように、個々のグループ72のドット52は、2つの行、つまり上の行74及び下の行76で提供することができる。図に示されているように、個々のグループ72の隣接するドット52(個々の行74、76の中の)は、第1の距離78だけ間隔を隔てており、一方、データ・アレイ70に沿って隣接しているドット・グループ72は、第2の距離80だけ間隔を隔てている。特定の実施例では、第2の距離80は、偏差、たとえば第1の距離78、たとえば1Tの(2+x%)1Tであってもよい。したがって、一連のドット・グループ72がデータ・アレイ70に沿って一様に提供され、第1の間隔が個々のグループ72の隣接するドット52とドット52の間に使用され、また、第2の間隔が隣接するドット・グループ72とドット・グループ72の間に使用されることになる。特定の実施例では、図4に示されているように、第2の間隔即ち距離80は、第1の間隔即ち距離78より長くなっている。
【0029】
データ・アレイ70の個々のドット52は、正(「+」の表示で示されている)又は負(「−」の表示で示されている)のいずれかに磁化されている。特定の実施例では、図4に示されているように、データ・アレイ70の個々のドット・グループ72の上の行74を正に磁化し、一方、データ・アレイ70の個々のドット・グループ72の下の行76を負に磁化することができる。ドット・グループ72の磁化パターンは、広範囲にわたる様々な任意の形態を取ることができ、本発明の実施例は、このようないかなる形態にも何ら制限されないことを理解されたい。知られているように、ビットは、書込みの際に、その極性即ち磁化が反転する。磁気記憶媒体に記録することができる様々な技法、たとえば垂直方向又は縦方向のいずれかに記録することができる技法が存在しており、当分野では両方の技法が良く知られている。本明細書に提供されている実施例は、記録技法に無関係に適用することができる。
【0030】
引き続いて図4を参照すると、ドット・グループ72に書き込む際に、書込みヘッド61aは、ドット52の特定の百分率、つまりデータ・アレイ70の特定の書込みタイミング窓の中にのみ書き込むことができる。したがって、特定の実施例では、特定のドット・グループ72のみに書き込むことができる。たとえば、本発明の実施例は、このような書込みには一切限定されないが、初期記録パターンにドット52の連続領域の交番磁化が包含されている場合、書き込まれたドットの磁化は、データ・アレイ70の1セグメントとして反映されることになり、セグメント内のドット52は、それらの反転磁化を有している。図5は、本発明の特定の実施例によるこのような書込みプロセスの後の図4のデータ・アレイ70を示したものである。上で説明したように、オペレーション・システムは、ドットに書き込むための初期パターン(即ち既知のコード列)を知り、特定の書込みタイミング窓82の中に書き込む。したがって、図5に示されているように、窓82の中のこれらのドット・グループ72は、それらの反転磁化、つまり方向がフリップした磁化を有している。
【0031】
さらに図5を参照すると、初期ドット・グループ72から2x%、3x%及び4x%だけシフトしているドット・グループ72に関しては、書込み動作(窓82内の)によって磁化が反転することが例示的に示されている。書込みプロセスに引き続いて、読取りヘッド61bがデータ・アレイ70のドット・グループ72を読み取り、このような読み取った情報を磁気記憶システムの制御システムに転送する。図1〜図3のディスク・ドライブ10及び対応するディスク16を包含している特定の実施例では、このような情報は、フレックス回路アセンブリ42を介してPCBAのコントローラ(たとえばマイクロプロセッサ)に転送される。このような実施例のコントローラは、書込みプロセス後のドット・グループ72の磁化パターンと期待磁化パターンとを比較している。したがってコントローラは、引き続いて、前置増幅器/ドライバ回路44の書込みタイミング・ゲート(図示せず)を介して書込み電流を導くことができ、それにより、対応する同期化修正が書込みタイミングに提供される。特定の実施例では、このような修正は、データ・アレイ70の時間シフト・ドット・グループ72に対する参照に基づいている。たとえば、図5を参照すると、後続するアレイ70への記録のために、書込み電流を−2x%だけ修正することによって書込みプロセスをデータ・アレイ70の第1のドット・グループ72と同相にすることができる。
【0032】
上で説明したように、図6は、図4及び図5を使用して例示的に示されている、本発明の特定の実施例による時間シフト方法のための流れ図である。ステップ90には、ドット・グループ72を備えた磁気記憶媒体を製造するステップが包含されており、それによってこれらのグループ72は、1つ又は複数のデータ・アレイ70に沿って生成される。たとえば図2を参照すると、特定の実施例では、磁気記憶媒体が磁気記録ディスク16である場合、ドット・グループ72は、ディスク16上の同心データ・トラック、たとえば54、54’、等々のうちの1つ又は複数に沿って提供される。図4を参照して上で説明したように、個々のドット・グループ72のドット52並びにドット・グループ72は、それぞれ別様に間隔を隔てている。図4は、1つのデータ・アレイ70及びその上のドット・グループ72を例示的に示したものであるが、特定の実施例では、磁気記憶媒体上の任意の他のデータ・アレイを同様に構築することも可能である。
【0033】
ステップ92には、磁気記憶装置のための準備状態が包含されている。したがってステップ90の磁気記憶媒体が磁気記憶装置にロードされ、その後、必要に応じて、磁気記憶媒体及びそのドットに関連する磁気記憶装置の書込み同期化を修正することができる。磁気記憶装置の書込み同期化に対する修正は、場合によっては、データ・アレイ70に対する書込み機能の実行毎に必ずしも実施する必要はないことを理解されたい。したがって、特定の実施例では、トリガ事象を使用して、その制御システムによる磁気記憶装置の書込み同期化のチェックを開始することができる。したがって、必要に応じて、磁気記憶装置の書込み同期化に関連するチェックの頻度を制御することができる。たとえば、このようなトリガ事象は、データ・アレイ70への書込みが特定の数に到達したことを包含することができる。特定の実施例では、図1のディスク・ドライブ10を参照すると、PCBAコントローラによってこのような書込み量を追跡することができ、書込み動作が特定の数に到達すると、書込み同期化をチェックするよう制御システムに指令が発せられ、流れ図はステップ94へ進行する。
【0034】
ステップ94には、データ・アレイ70のドット・グループ52に書き込むステップが包含されている。このようなステップには、もともと、書込みヘッド61aをデータ・アレイ70の真上に配置するステップが包含されている。特定の実施例では、図1及び図3を参照して上で説明したように、VCM36によって、制御システム60からの信号を介して、対応するアクチュエータ・アーム26が配置される。制御システム60は、読取りヘッド61bがデータ・アレイ70上のサーボ・セクタから読み取った信号からそのキューを得ている。引き続いて、データ・アレイ70のドット・グループ72への書込みを容易にするために、データ・アレイ70の真上にアクチュエータ・アーム26の変換器30を正確に配置することができる。このように配置されると、書込みヘッド61aは、ドット・グループ72への書込みをいつでも開始することができる。上で説明したように、特定の実施例では、書込みヘッド61aは、ディスク・ドライブ10のPCBAのコントローラからそのキューを得ている。PCBAは、フレックス回路アセンブリ42と共同して動作し、前置増幅器/ドライバ回路44からの書込み電流のタイミングを制御している。したがって、特定の実施例では、PCBAのコントローラは、データ・アレイ70のドット・グループ72への初期書込みパターン(既知のコード列)を容易にするために、書込みヘッド61aに信号を転送している。上で説明したように、書込みタイミング窓82の中に存在しているドット・グループ72のみが記録され、その結果、それらの磁化が反転することになる。
【0035】
ステップ96には、データ・アレイ70のドット・グループ72を読み取るステップ、及び読み取った情報を磁気記憶オペレーション・システムに転送するステップが包含されている。特定の実施例では、読取りヘッド61bによってこのような情報が読み取られ、且つ、読取りヘッド61bからディスク・ドライブ10の制御システムへ転送される。上で説明したように、特定の実施例では、フレックス回路アセンブリ42がこのような転送を容易にしており、また、このような転送には、読み取ったデータ信号をディスク・ドライブ10のPCBAコントローラに向けて経路指定するステップが包含されている。
【0036】
ステップ98には、書込み同期化修正が必要であるかどうかを読み取ったデータに基づいて決定するステップが包含されている。特定の実施例では、PCBAコントローラは、書込みプロセスが実行された後に読み取られたドット・グループ72の磁化パターンと、そのドット・グループ72の期待磁化パターンとを比較している。特定の実施例では、このような期待磁化パターンをPCBAコントローラの記憶装置に記憶することができる。読み取った磁化パターンと期待磁化パターンが異なっている場合、書込みタイミング即ち同期化を修正しなければならない。したがって流れ図はステップ100を継続し、それによって書込みタイミング修正が実行される。特定の実施例では、図5を参照して上で説明したように、このような修正は、データ・アレイ70の時間シフト・ドット・グループ72に対する参照に基づいており、PCBAコントローラがこのような修正を容易にしている。このような修正が実行されると、流れ図はステップ92へループ・バックする。一方、書込みタイミングを修正する必要がない場合(たとえば、データ・アレイ70の第1のドット・グループ72で書込みタイミングを開始することが分かると)、流れ図は、ステップ98からステップ92へループ・バックする。
【0037】
上で説明したように、時間シフト技法は、磁気記憶装置のための書込み同期化を修正するべく様々な方法で適用することができる。たとえば、特定の実施例では、このような修正は、磁気記憶媒体上に書き込まれるドットに対する書込みプロセスの時間シフトを包含することができる。図7及び図8は、このタイプの時間シフトの説明を補助するために、本発明の特定の実施例による磁気記憶媒体の一部上のデータ・アレイの平面図をそれぞれ示したものである。図4及び図5に関連して示した上記説明と同様、図7には、書込みプロセスに先立つデータ・アレイが示されており、一方、図8には、1つの時間シフト書込みプロセスの後のアレイが示されている。さらに、図9は、上で説明した図6と同様、図7及び図8に対応しており、本発明の特定の実施例による時間シフト方法のための流れ図である。
【0038】
図7を参照すると、データ・アレイ110のドット52は、1つ又は複数の行で提供することができる。たとえば、図に示されているように、ドット52は、上の行112及び下の行114の2つの行で例示的に提供されている。図に示されているように、個々の行112及び114のドット52は、データ・アレイ110の領域に沿って、特定の距離116、たとえば1Tだけ一様に間隔を隔てている。図4のドット52に関連して示した上記説明と同様、データ・アレイ110の個々のドット52は、正(「+」の表示で示されている)又は負(「−」の表示で示されている)のいずれかに磁化されている。特定の実施例では、図7に示されているように、データ・アレイ110の上の行112を正に磁化し、一方、データ・アレイ110の下の行114を負に磁化することができる。しかしながら、図4に関連して示した上記説明と同様、ドット52の磁化パターンは、広範囲にわたる様々な任意の形態を取ることができることを理解されたい。さらに、本明細書において提供されている実施例は、磁気記憶媒体のドット52に記録するために使用される技法に無関係に適用することができる。
【0039】
特定の実施例では、書込みプロセスに関連する複数の時間シフトにわたって、既知のコードがデータ・アレイ110のドット52に書き込まれる。したがって、データ・アレイ110に沿ったドット52に関連するコードの記録は、個々の時間シフト書込みプロセスによって全く異なる独自のものになる。その結果、時間シフトの大きさに応じて、書込みプロセスのほとんどが、データ・アレイ110のドット52に関連するコードの期待書込みパターンからオフセットした書込みパターンをもたらすことになる。したがって、書込みプロセスを時間シフトさせることにより、結果として生じるコードの書込みパターンと、そのコードの期待書込みパターンとを比較することができる。コードの最も小さい書込み位置決め誤差、即ち期待書込みパターンに最も近い位置合せをもたらす時間シフトを決定する場合、磁気記憶装置は、将来の書込みプロセスのために、相応じて、書込みヘッドへの書込み電流をシフトさせるべく引き続いてこのような時間シフトを使用することができる。
【0040】
さらに図7を参照すると、データ・アレイ110のドット52に書き込む場合、書込みヘッド61aは、ドット52の特定の百分率、つまりデータ・アレイ110の特定の書込みタイミング窓の中にのみ書き込むことができる。したがって、図4〜図6に関連して示した上記説明と同様、データ・アレイ110の特定のドット52のみに書き込むことができる。たとえば、本発明の実施例は、このような書込みには一切限定されないが、初期記録パターンにドット52の連続領域の交番磁化が包含されている場合、書き込まれたドットの磁化は、データ・アレイ110の1セグメントとして反映されることになり、セグメント内のドット52は、それらの反転磁化を有している。
【0041】
図8は、本発明の特定の実施例による初期書込みプロセス後の図7のデータ・アレイ110を示したものである。上で説明したように、オペレーション・システムは、ドットに書き込むための初期パターン(既知のコード列)が分かっているが、最初の書込みプロセスのタイミングは、通常、時間シフトされない。例示されているように、書込みヘッド61aは、書込みタイミング窓82’の中に書き込む。したがって、図8に示されているように、窓82’の中に存在しているこれらのドット52のみが、それらの反転磁化、つまり方向がフリップした磁化を有している。初期書込みプロセスに引き続いて、読取りヘッド61bがデータ・アレイ110のドット52を読み取り、このような読み取った情報を磁気記憶システムの制御システムに転送する。図1〜図3のディスク・ドライブ10及び対応するディスク16(及び図4〜図6に関連して説明した構成要素に類似した構成要素)を包含している特定の実施例では、このような情報は、フレックス回路アセンブリ42を介してPCBAのコントローラ(たとえばマイクロプロセッサ)に転送される。このような実施例のコントローラは、初期書込みプロセス後のドット52の書込みパターンと期待書込みパターン(たとえばコントローラの記憶装置に記憶されている)とを比較し、且つ、これらの2つの間に何らかの矛盾、つまり誤りが存在しているかどうかを決定している。誤りが決定される場合、このような誤りは、恐らく初期書込みプロセスに対応しており、コントローラの記憶装置に記憶される。
【0042】
このような書込みプロセスは、必要に応じて、初期書込みプロセスから時間シフトされた他の書込みプロセスを使用して繰り返すことができる。たとえば、特定の実施例では、後続する書込みプロセスは、初期書込みプロセスのx%の書込み時間シフトを有する書込みプロセス、次に初期書込みプロセスの2x%の書込み時間シフトを有する書込みプロセス、次に初期書込みプロセスの3x%の書込み時間シフトを有する書込みプロセス、等々、以下同様の書込み時間シフトを有する書込みプロセスを包含することができる。これらの時間シフト書込みプロセスからの書込みパターンの他の読取りに引き続いて、これらの書込みパターンと期待書込みパターンとの間の書込み位置決め誤差が計算され、且つ、これらの誤りがそれらの対応する書込みプロセス時間シフトと共にPCBAコントローラの記憶装置に記憶される。
【0043】
引き続いて、PCBAコントローラは、前置増幅器/ドライバ回路44の書込みタイミング・ゲート(図示せず)を介して書込み電流を導くことができ、それにより対応する書込み同期化修正が提供される。特定の実施例では、このような修正は、最も小さい誤りをもたらす書込みプロセスの特定の時間シフトに対する参照に基づくことができる。たとえば、初期書込みプロセスの2x%の時間シフトだけ書込みパターンをシフトさせ、対応する書込み位置決め誤差を計算すると、期待書込みパターンと比較した場合、2x%のこのような時間シフト(データ・アレイ110に対する他の時間シフト書込みプロセス又は初期書込みプロセスではなく)によって書込み誤りが最も小さくなることが分かる。したがって、書込み電流を−2x%シフトさせることにより、データ・アレイ110のドット52を備えた期待相に将来の書込みプロセスがもたらされることになる。
【0044】
上で説明したように、図9は、図7及び図8を使用して例示的に示されている、本発明の特定の実施例による時間シフト方法のための流れ図である。ステップ120には、1つ又は複数のデータ・アレイ70に沿って生成されたドット52を備えた磁気記憶媒体を製造するステップが包含されている。たとえば、特定の実施例では、図2を参照すると、磁気記憶媒体が磁気記録ディスク16である場合、ドット52は、ディスク16上の同心データ・トラック、たとえば54、54’、等々のうちの1つ又は複数に沿って提供される。図7を参照して上で説明したように、ドット52は一様に間隔を隔てている。図7は、1つのデータ・アレイ70及びその上のドット52を例示的に示したものであるが、特定の実施例では、磁気記憶媒体上の任意の他のデータ・アレイを同様に構築することも可能である。
【0045】
ステップ122には、磁気記憶装置のための準備状態が包含されており、図6に示されているステップ92に関連して説明した内容と同様である。ステップ124には、データ・アレイ110のドット52への初期書込みステップが包含されている。このようなステップには、もともと、書込みヘッド61aをデータ・アレイ110の真上に配置するステップが包含されており、これは、図6に示されているステップ94に関連して示した説明と同様である。このように配置されると、書込みヘッド61aは、ドット52への書込みをいつでも開始することができる。上で説明したように、特定の実施例では、書込みヘッド61aは、ディスク・ドライブ10のPCBAのコントローラからそのキューを得ている。PCBAは、フレックス回路アセンブリ42と共同して動作し、前置増幅器/ドライバ回路44からの書込み電流のタイミングを制御している。したがって、特定の実施例では、PCBAのコントローラは、データ・アレイ70のドット・グループ72に関連する初期書込みパターンを容易にするために、書込みヘッド61aに信号を転送している。上で説明したように、書込みタイミング窓82’の中に存在しているドット・グループ72のみが記録され、その結果、それらの磁化が反転することになる。上で言及したように、初期書込みプロセスに関しては、時間シフトは不要である。
【0046】
ステップ126には、データ・アレイ110のドット52を読み取るステップ、及び読み取った情報を磁気記憶オペレーション・システムに転送するステップが包含されており、これは、図6に示されているステップ96に関連して示した説明と同様である。ステップ128には、初期書込みプロセス後のドット52の書込みパターンと期待書込みパターン(たとえばコントローラの記憶装置に記憶されている)との間に矛盾、つまり書込み位置決め誤差が存在しているかどうかをPCBAコントローラによって決定するステップが包含されている。誤りが決定される場合、このような誤りは、恐らく初期書込みプロセスに対応しており、コントローラの記憶装置にこのようなデータが記録され、流れ図はステップ130へ進行する。しかしながら、誤りが決定されない場合、流れ図はステップ122へループ・バックする。
【0047】
ステップ130には、データ・アレイ110のドット52に対する他の書込みプロセスが包含されている。したがって、上で説明したように、このような他の書込みプロセスには、ステップ124で最初に書き込まれた書込みパターンと同じ書込みパターンの書込みが包含されているが、初期書込みプロセスの既知の時間シフトで書き込まれる。上で説明したように、特定の実施例では、他の書込みプロセスのこの既知の時間シフトは、初期書込みプロセスのx%の書込み時間シフトで開始し、引き続いて、初期書込みプロセスの他の偏差、たとえば2x%、3x%、等々まで連続的に進行することができる。このような偏差は、特定の実施例では、PCBAコントローラの中でプログラムされる。しかしながら、このような偏差は、必要に応じてプログラムすることができ、本明細書において説明されている実施例に限定してはならない。
【0048】
ステップ132には、データ・アレイ70のドット52を読み取るステップ、及び読み取った情報を磁気記憶オペレーション・システムに転送するステップが包含されている(上記ステップ126と同様)。ステップ132はさらに、他の書込みプロセス後のドット52の書込みパターンと期待書込みパターン(たとえばコントローラの記憶装置に記憶されている)との間の何らかの矛盾、つまり書込み位置決め誤差をPCBAコントローラによって決定するステップが包含されている。誤りが決定される場合、このような誤りは、恐らく他の書込みプロセスに対応しており、コントローラの記憶装置にこのようなデータが記録される。
【0049】
ステップ134には、他の時間シフト書込みプロセスを実行する必要があるかどうかを決定するステップが包含されている。特定の実施例では、このような決定は、PCBAコントローラによって提供される。たとえば、特定の実施例では、時間シフト書込み修正の決定を継続するためにシステムがトリガされる前に、特定の量の書込みプロセス反復(たとえばPCBAコントローラの中でプログラムされる)を実行しなければならない(ステップ136)。別法としては、特定の実施例では、初期書込みプロセスの後、タイマー(たとえばPCBAコントローラの一部としての)が起動され、一定の時間期間が経過するとシステムがトリガされて修正の決定を継続する。特定の実施例では、このトリガは、上記パラメータ又は他の同様のパラメータの組合せであってもよい。他の時間シフト書込みプロセスを実行する必要があることが決定されると、流れ図はステップ128へループ・バックし、また、他の時間シフト書込みプロセスを実行する必要がない場合は、流れ図はステップ136へ進行する。
【0050】
ステップ136には、書込み同期化を修正するステップが包含されている。特定の実施例では、図8を参照して上で説明したように、このような修正は、最も小さい書込み位置決め誤差に対応する書込みプロセスの特定の時間シフトに対する参照に基づいており、また、PCBAコントローラがこのような修正を容易にしている。このような修正が実行されると、流れ図はステップ122へループ・バックする。
【0051】
以上、本発明について、開示されている特定の実施例を参照して説明したが、本発明の精神及び範囲を逸脱することなく、形態及び細部に変更を加えることができることは当業者には認識されよう。
【特許請求の範囲】
【請求項1】
複数のデータ・アレイを備えた記録層を有する基板と、
前記複数のデータ・アレイのうちの1つの上の複数のドットであって、前記ドットが複数のグループで提供され、前記ドット・グループが前記1つのデータ・アレイに沿って展開し、個々のグループの前記ドットが第1の間隔を有し、また、前記ドット・グループが第2の間隔を有し、前記第1の間隔及び前記第2の間隔が互いに異なり、前記グループの前記ドットと前記ドット・グループの間の間隔の差が、前記1つのデータ・アレイに関連する書込み同期化の修正を可能にしている複数のドットと
を備えた磁気記憶媒体。
【請求項2】
前記磁気記憶媒体が磁気記憶ディスクを備え、前記データ・アレイが同心状に間隔を隔てたデータ・トラックを備えた、請求項1に記載の磁気記憶媒体。
【請求項3】
前記ドットが繰り返し上書きすることができる磁気ビットからなり、個々のグループの前記ドットが1つ又は複数の行で提供された、請求項1に記載の磁気記憶媒体。
【請求項4】
前記第2の間隔が前記第1の間隔の偏差である、請求項1に記載の磁気記憶媒体。
【請求項5】
前記第2の間隔が前記第1の間隔より広い、請求項1に記載の磁気記憶媒体。
【請求項6】
1つ又は複数のドット・グループが、前記1つのデータ・アレイに沿った他のドット・グループの磁化パターンから反転した磁化パターンを有し、前記1つ又は複数のドット・グループが、前記1つのデータ・アレイの書込みタイミング窓を集合的に備えた、請求項1に記載の磁気記憶媒体。
【請求項7】
前記書込みタイミング窓の前記1つ又は複数のドット・グループが前記1つのデータ・アレイの1つの連続セグメントを備えた、請求項6に記載の磁気記憶媒体。
【請求項8】
前記書込みタイミング窓が、前記1つのデータ・アレイに関連する書込み同期化の修正を可能にするために、前記1つのデータ・アレイに沿って少なくとも1つのドット・グループだけ前又は後にシフトするようにされている、請求項6に記載の磁気記憶媒体。
【請求項9】
磁気記憶装置のための書込み同期化を修正する方法であって、
既知のコード列を前記磁気記憶装置内の磁気記憶媒体の1つのデータ・アレイに書き込むステップであって、前記1つのデータ・アレイがその上に配置された複数のドットを有し、前記ドットが複数のグループで提供され、前記グループが前記1つのデータ・アレイに沿って展開し、個々のドット・グループの前記ドットの間隔が前記ドット・グループの間隔とは異なる、書き込むステップと、
前記既知のコード列が前記1つのデータ・アレイに書き込まれた後に、前記1つのデータ・アレイを読み取るステップと、
前記磁気記憶装置の書込み同期化を修正する必要があるかどうかを前記読み取った情報に基づいて決定するステップと、
決定がこのような修正が必要であることを示している場合、前記1つのデータ・アレイに関連する前記磁気記憶装置の書込み同期化を修正するステップであって、それによってこのような修正が、書込みタイミング窓を前記1つのデータ・アレイに沿って少なくとも1つのドット・グループだけ前又は後にシフトさせる、書込み同期化を修正するステップを含むステップと
を含む方法。
【請求項10】
前記磁気記憶装置がディスク・ドライブを備え、前記磁気記憶媒体が磁気記憶ディスクを備え、前記1つのデータ・アレイに書き込むステップが前記磁気記憶ディスクのデータ・トラックに書き込むステップを含む、請求項9に記載の方法。
【請求項11】
前記既知のコード列を前記1つのデータ・アレイに書き込むステップが、前記既知のコード列に基づいて前記1つのデータ・アレイに沿った前記ドット・グループのうちの1つ又は複数の磁化方向を反転させるステップを含み、前記1つのデータ・アレイを読み取るステップが前記1つ又は複数のドット・グループの前記反転磁化方向を読み取るステップを含む、請求項9に記載の方法。
【請求項12】
書込み同期化を修正する必要があるかどうかを決定するステップが、前記1つのデータ・アレイの読み取った磁化パターンと、前記1つのデータ・アレイのための期待磁化パターンとを比較するステップを含み、前記1つのデータ・アレイの前記読み取った磁化パターンが、前記1つのデータ・アレイから読み取られる前記既知のコード列に対応する、請求項9に記載の方法。
【請求項13】
前記読み取った磁化パターンと前記期待磁化パターンとを比較するステップが前記磁気記憶装置のコントローラによって実行され、前記コントローラが前記期待磁化パターンが記憶される記憶装置を有する、請求項12に記載の方法。
【請求項14】
前記読み取った磁化パターンと前記期待磁化パターンとの間の差が、前記磁気記憶装置の前記書込み同期化を修正するための前記書込みタイミング窓の前記シフトに対応する、請求項12に記載の方法。
【請求項15】
磁気記憶装置のための書込み同期化を修正する方法であって、
既知のコード列を最初に書込み、さらに1回又は複数回にわたって前記磁気記憶装置内の磁気記憶媒体の1つのデータ・アレイに書き込むステップであって、前記1つのデータ・アレイがその上に配置された複数のドットを有し、前記ドットが前記1つのデータ・アレイに沿って一様に間隔を隔て、前記複数回にわたる書込みステップの各々が前記初期書込みとは異なる時間シフトを包含している、書き込むステップと、
前記1つのデータ・アレイへの前記既知のコード列の個々の書込みステップの後に、前記1つのデータ・アレイを読み取るステップと、
前記1つのデータ・アレイの個々の読取りステップの後に、書込み位置決め誤差を計算するステップと、
計算された最も小さい書込み位置決め誤差に関連する前記磁気記憶装置の書込み同期化を修正するステップと
を含む方法。
【請求項16】
前記磁気記憶装置がディスク・ドライブを備え、前記磁気記憶媒体が磁気記憶ディスクを備え、前記1つのデータ・アレイに書き込む個々のステップが前記磁気記憶ディスクのデータ・トラックに書き込むステップを含む、請求項15に記載の方法。
【請求項17】
前記既知のコード列を前記1つのデータ・アレイに書き込む個々のステップが、前記既知のコード列に基づいて前記1つのデータ・アレイに沿った前記ドットのうちの1つ又は複数の磁化方向を反転させるステップを含み、前記1つのデータ・アレイを読み取る個々のステップが、前記書込みステップのうちの1つに対して、前記1つのデータ・アレイに沿った前記ドットの反転磁化方向を読み取るステップを含む、請求項15に記載の方法。
【請求項18】
個々の読取りステップ後に書込み位置決め誤差を計算するステップが、書込みステップ毎に前記1つのデータ・アレイの読み取った磁化パターンと、前記1つのデータ・アレイのための期待磁化パターンとを比較するステップを含み、読み取った個々の磁化パターンが、前記1つのデータ・アレイから読み取られる前記既知のコード列に対応する、請求項15に記載の方法。
【請求項19】
前記読み取った個々の磁化パターンと前記期待磁化パターンとを比較するステップが前記磁気記憶装置のコントローラによって実行され、前記コントローラが前記期待磁化パターンが記憶される記憶装置を有する、請求項18に記載の方法。
【請求項20】
前記読み取った磁化パターンと前記期待磁化パターンとの間の差が前記計算された書込み位置決め誤差に対応し、最も小さい誤差が前記計算された書込み位置決め誤差から選択され、且つ、前記磁気記憶装置の前記書込み同期化を修正するための前記書込みタイミングのシフトに使用される、請求項18に記載の方法。
【請求項1】
複数のデータ・アレイを備えた記録層を有する基板と、
前記複数のデータ・アレイのうちの1つの上の複数のドットであって、前記ドットが複数のグループで提供され、前記ドット・グループが前記1つのデータ・アレイに沿って展開し、個々のグループの前記ドットが第1の間隔を有し、また、前記ドット・グループが第2の間隔を有し、前記第1の間隔及び前記第2の間隔が互いに異なり、前記グループの前記ドットと前記ドット・グループの間の間隔の差が、前記1つのデータ・アレイに関連する書込み同期化の修正を可能にしている複数のドットと
を備えた磁気記憶媒体。
【請求項2】
前記磁気記憶媒体が磁気記憶ディスクを備え、前記データ・アレイが同心状に間隔を隔てたデータ・トラックを備えた、請求項1に記載の磁気記憶媒体。
【請求項3】
前記ドットが繰り返し上書きすることができる磁気ビットからなり、個々のグループの前記ドットが1つ又は複数の行で提供された、請求項1に記載の磁気記憶媒体。
【請求項4】
前記第2の間隔が前記第1の間隔の偏差である、請求項1に記載の磁気記憶媒体。
【請求項5】
前記第2の間隔が前記第1の間隔より広い、請求項1に記載の磁気記憶媒体。
【請求項6】
1つ又は複数のドット・グループが、前記1つのデータ・アレイに沿った他のドット・グループの磁化パターンから反転した磁化パターンを有し、前記1つ又は複数のドット・グループが、前記1つのデータ・アレイの書込みタイミング窓を集合的に備えた、請求項1に記載の磁気記憶媒体。
【請求項7】
前記書込みタイミング窓の前記1つ又は複数のドット・グループが前記1つのデータ・アレイの1つの連続セグメントを備えた、請求項6に記載の磁気記憶媒体。
【請求項8】
前記書込みタイミング窓が、前記1つのデータ・アレイに関連する書込み同期化の修正を可能にするために、前記1つのデータ・アレイに沿って少なくとも1つのドット・グループだけ前又は後にシフトするようにされている、請求項6に記載の磁気記憶媒体。
【請求項9】
磁気記憶装置のための書込み同期化を修正する方法であって、
既知のコード列を前記磁気記憶装置内の磁気記憶媒体の1つのデータ・アレイに書き込むステップであって、前記1つのデータ・アレイがその上に配置された複数のドットを有し、前記ドットが複数のグループで提供され、前記グループが前記1つのデータ・アレイに沿って展開し、個々のドット・グループの前記ドットの間隔が前記ドット・グループの間隔とは異なる、書き込むステップと、
前記既知のコード列が前記1つのデータ・アレイに書き込まれた後に、前記1つのデータ・アレイを読み取るステップと、
前記磁気記憶装置の書込み同期化を修正する必要があるかどうかを前記読み取った情報に基づいて決定するステップと、
決定がこのような修正が必要であることを示している場合、前記1つのデータ・アレイに関連する前記磁気記憶装置の書込み同期化を修正するステップであって、それによってこのような修正が、書込みタイミング窓を前記1つのデータ・アレイに沿って少なくとも1つのドット・グループだけ前又は後にシフトさせる、書込み同期化を修正するステップを含むステップと
を含む方法。
【請求項10】
前記磁気記憶装置がディスク・ドライブを備え、前記磁気記憶媒体が磁気記憶ディスクを備え、前記1つのデータ・アレイに書き込むステップが前記磁気記憶ディスクのデータ・トラックに書き込むステップを含む、請求項9に記載の方法。
【請求項11】
前記既知のコード列を前記1つのデータ・アレイに書き込むステップが、前記既知のコード列に基づいて前記1つのデータ・アレイに沿った前記ドット・グループのうちの1つ又は複数の磁化方向を反転させるステップを含み、前記1つのデータ・アレイを読み取るステップが前記1つ又は複数のドット・グループの前記反転磁化方向を読み取るステップを含む、請求項9に記載の方法。
【請求項12】
書込み同期化を修正する必要があるかどうかを決定するステップが、前記1つのデータ・アレイの読み取った磁化パターンと、前記1つのデータ・アレイのための期待磁化パターンとを比較するステップを含み、前記1つのデータ・アレイの前記読み取った磁化パターンが、前記1つのデータ・アレイから読み取られる前記既知のコード列に対応する、請求項9に記載の方法。
【請求項13】
前記読み取った磁化パターンと前記期待磁化パターンとを比較するステップが前記磁気記憶装置のコントローラによって実行され、前記コントローラが前記期待磁化パターンが記憶される記憶装置を有する、請求項12に記載の方法。
【請求項14】
前記読み取った磁化パターンと前記期待磁化パターンとの間の差が、前記磁気記憶装置の前記書込み同期化を修正するための前記書込みタイミング窓の前記シフトに対応する、請求項12に記載の方法。
【請求項15】
磁気記憶装置のための書込み同期化を修正する方法であって、
既知のコード列を最初に書込み、さらに1回又は複数回にわたって前記磁気記憶装置内の磁気記憶媒体の1つのデータ・アレイに書き込むステップであって、前記1つのデータ・アレイがその上に配置された複数のドットを有し、前記ドットが前記1つのデータ・アレイに沿って一様に間隔を隔て、前記複数回にわたる書込みステップの各々が前記初期書込みとは異なる時間シフトを包含している、書き込むステップと、
前記1つのデータ・アレイへの前記既知のコード列の個々の書込みステップの後に、前記1つのデータ・アレイを読み取るステップと、
前記1つのデータ・アレイの個々の読取りステップの後に、書込み位置決め誤差を計算するステップと、
計算された最も小さい書込み位置決め誤差に関連する前記磁気記憶装置の書込み同期化を修正するステップと
を含む方法。
【請求項16】
前記磁気記憶装置がディスク・ドライブを備え、前記磁気記憶媒体が磁気記憶ディスクを備え、前記1つのデータ・アレイに書き込む個々のステップが前記磁気記憶ディスクのデータ・トラックに書き込むステップを含む、請求項15に記載の方法。
【請求項17】
前記既知のコード列を前記1つのデータ・アレイに書き込む個々のステップが、前記既知のコード列に基づいて前記1つのデータ・アレイに沿った前記ドットのうちの1つ又は複数の磁化方向を反転させるステップを含み、前記1つのデータ・アレイを読み取る個々のステップが、前記書込みステップのうちの1つに対して、前記1つのデータ・アレイに沿った前記ドットの反転磁化方向を読み取るステップを含む、請求項15に記載の方法。
【請求項18】
個々の読取りステップ後に書込み位置決め誤差を計算するステップが、書込みステップ毎に前記1つのデータ・アレイの読み取った磁化パターンと、前記1つのデータ・アレイのための期待磁化パターンとを比較するステップを含み、読み取った個々の磁化パターンが、前記1つのデータ・アレイから読み取られる前記既知のコード列に対応する、請求項15に記載の方法。
【請求項19】
前記読み取った個々の磁化パターンと前記期待磁化パターンとを比較するステップが前記磁気記憶装置のコントローラによって実行され、前記コントローラが前記期待磁化パターンが記憶される記憶装置を有する、請求項18に記載の方法。
【請求項20】
前記読み取った磁化パターンと前記期待磁化パターンとの間の差が前記計算された書込み位置決め誤差に対応し、最も小さい誤差が前記計算された書込み位置決め誤差から選択され、且つ、前記磁気記憶装置の前記書込み同期化を修正するための前記書込みタイミングのシフトに使用される、請求項18に記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−49787(P2010−49787A)
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願番号】特願2009−188211(P2009−188211)
【出願日】平成21年8月17日(2009.8.17)
【出願人】(500373758)シーゲイト テクノロジー エルエルシー (278)
【Fターム(参考)】
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願日】平成21年8月17日(2009.8.17)
【出願人】(500373758)シーゲイト テクノロジー エルエルシー (278)
【Fターム(参考)】
[ Back to top ]