
最適航路探索方法
【課題】運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データに基づき、ある海域の出発点から到着点までについて最適航路を演算する際、演算上の船舶の航行に合わせて変化する海気象データを用いる最適航路探索方法を提供することを目的とする。
【解決手段】運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいてある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたものである。
【解決手段】運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいてある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶の最適な航路を探索する最適航路探索方法に関するものである。
【背景技術】
【0002】
船舶が航行する際には、外部の機関等から、現在、将来に関する様々な海気象に関するデータ(以下、海気象データという)が提供される(例えば特許文献1参照)。
そして、船舶の運航計画のためには、その計画時において入手した海気象状況を示す海気象データに基づいて最適航路を選定する必要がある。このような最適航路を選定する演算はウェザールーティングと呼ばれ、その演算に対して各種の最適解を求める手法が提案されており、また既に実用に供されている。ここでいう海気象状況とは、天気図(等圧線分布)、風(風速/風向)分布、波浪(波高/波周期/波向)分布、潮流(流速/流向)分布等を示す。
【特許文献1】特開昭61−247917号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来は、一航海(ある出発点からある到着点まで)の最適航路を求めるために使用される海気象状況を示す海気象データは、ある日時における予報値分布(空間分布)に基づくものであった。
しかしながら、演算上における航路を船舶が進んで行くに従って海気象状況も変化して行くが、従来の最適航路探索を行うための演算では、この船舶の航行に従って海気象状況も変化して行くという影響を考慮していないので、演算精度が低いという問題があった。
そのため、従来の演算された最適航路に基づいて実際に航行した場合には、航海途中における航路の変更も多く、また変更量も大きくなって、結果として最適な航海が実現されるものではなかった。
【0004】
そこで、本発明は上記のような問題点を解決し、運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データに基づいてある海域の出発点から到着点までについて最適航路を演算する際、演算上の船舶の航行に合わせて変化する海気象データを用いるようにした最適航路探索方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る最適航路探索方法は、運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたものである。
【発明の効果】
【0006】
本発明の最適航路探索方法によれば、運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたもので、船舶の航行に合わせた海気象状況予測の時間的/空間的変化も考慮することになり、従来のような海気象状況の変化に伴う航路変更を考慮せずに生じる演算精度が低いということはなくなり、実際の航海途中における航路の変更が少なくて済み、また変更量も小さくなって、運航時間も短く、燃料消費量も少なくて済むという効果がある。
【発明を実施するための最良の形態】
【0007】
実施の形態1.
図1は本発明の実施の形態1に係る最適航路探索方法に用いられるシステムの構成を表す図、図2は同最適航路探索方法によって探索された最適航路を示す説明図、図3は同最適航路探索方法によって探索された最適航路を海気象データの変化を考慮して最小時間のものを探索する手順を示す説明図、図4は同最適航路探索方法によって最適航路を探索する場合に海域におけるある位置で天気予報値としてどの時刻のもの使用するかの確定方法を説明する図である。
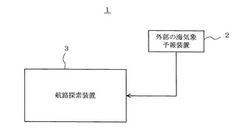
図1において、本システム1は、海気象データを予報する外部の海気象予報装置2と、その海気象予報装置2から何らかの通信手段を介して海気象データを含む信号を受信し、航路探索処理を行う航路探索装置3とから構成されている。
航路探索装置3は、運航計画時に船舶が固有に有する個船性能データと海気象予報装置2からの長期の海気象状況を示す海気象データとに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、演算上における船舶の航行に合わせて変化する船の位置、時刻で海気象データを変化させるものである。
【0008】
次に、本発明の実施の形態に係る最適航路探索方法について説明する。
この場合例として、1日目にある地点(出発点)を出発し、ほぼ4日後に到着点に達する航路を計算する。そして、天気予報(波浪、風、潮流の強さ/方向の予測分布)をもとに、出発点から到着点までどの航路を通れば最適(最小時間、最小燃費、等)かを演算するものである。
天気予報としては、出発日(1日目)から到着日(4日目)までの4種類(1日毎)の予報分布が入手されると仮定する。
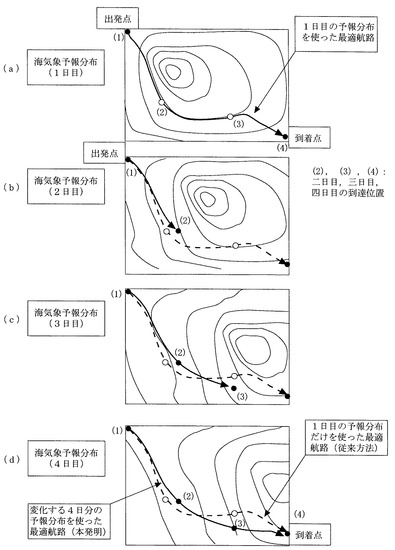
そして、本発明の方法は、1日目の4日分の天気予報分布(図2では、分かり易くするために波高のみの天気予報分布)をもとに、航路探索装置3が出発点(図2の(a)の点(1)から、到着点(図2の(a)の点(4)までの最適航路を最適航路探索アルゴリズムを用いて算出する。なお、最適航路探索アルゴリズムには、ダイクストラ法に基づくものや、A* アルゴリズム法に基づくもの等がある。
【0009】
図2の(a)の実線は本発明方法による最適航路の演算結果を示している。従来の方法も1日目の最初の最適航路を演算するまでは本発明方法とほぼ同じであるが、演算に使用する天気予報分布は1日目の予報結果であり、演算上で船が点(1)から点(4)まで航行する間、この天気予報分布に固定されている。
しかし、実際の航海では、船が点(1)から、点(2)(二日目の到着予測点)、点(3)(三日目の到着予測点)、点(4)(四日目の到着予測点=到着点)まで移動するに従い、図2の(a)〜(d)に示すように、波高分布の予報値が変化してゆくので、この従来方法は正確でない。
【0010】
そこで、本発明は、船が移動するに従って、変化する海気象データの予報値を用いて演算するようにしたものである。
本発明では、最適航路を演算するに際して、船が移動するに従って、その時々の船の位置/時刻に対応する予報時刻/予報位置の天気予報分布の予報値(この例では4セットの中から選んだもの)を用いる。
例えば、一日目の航路演算(図2の(a)の点(1)から、(b)の黒丸の点(2)に到着する途中まで)には一日目の天気予報分布を使用する。
二日目の航路演算(二日目の到着点(b)の黒丸の点(2)前後)には、二日目の天気予報分布を使用する。以下同様にして到着点までの演算を、場所/時刻の変化に合わせて天気予報分布も変化させながら実行する。
このような、実際の船の航行により即した演算手法の結果求められる最適航路の結果例を、図2の(d)に実線で示す。図2の(b)〜(d)における破線は従来方法の最適航路の演算結果を示す。
従来手法による最適航路と、本発明による最適航路の結果は異なり、本発明の手法の方が現実的な現象をより正確に表現できる。
【0011】
次に、本発明の最適航路探索方法についてのある海域の出発地から目的地までの最適航路を演算する具体的な方法について図3に基づいて説明する。
最適航路の演算に、例として図3に示すような方法を用いる場合を考える。
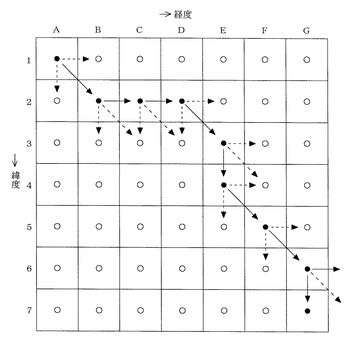
ここでは、演算する航路を含む海域をある間隔の緯度/経度で分割し、各々の分割された海域(セルと呼ぶ)において、各予報時刻で天気予報が与えられるとする。
各セルの中心点を結んで航路を形成してゆく。ある点(例えば、図3のA1)から次に進むべき点(例えば図3のB1かA2かB2か)の選択は、最適航路の演算であれば、各々の経路(図3の各矢印)に必要な時間が最小のものを選んでゆく、といった手法をとる。このときの船速や必要時間の演算には各々のセル内の天気予報値(波高、波周期、波向き、風速、風向き、潮流速、潮流方向)を用いる。
【0012】
図3で、矢印は各セル間の経路を示し、実線矢印は最適航路を選んだ結果のものを、破線矢印は演算結果として最適でなかった経路を示す。また、●は最適航路として選ばれた航路上の経由点を示し、○は「最適でなかった」として選ばれなかった座標位置を示す。
各セル(座標位置)における天気予報値は、時間の経過と共に変化する。演算上、船がいる位置によって、各セルにおける天気予報値としてどの時刻のものを使用するかを決める必要がある。
【0013】
即ち、入手される海気象データの予報値はある時間間隔における複数のデータ群になっている。(例えば、7日先までの1日毎のデータ)その時間間隔の間の任意の時刻における予報値はないため、その時々の時刻における予報値を最適航路の演算のために求めることが必要となる。
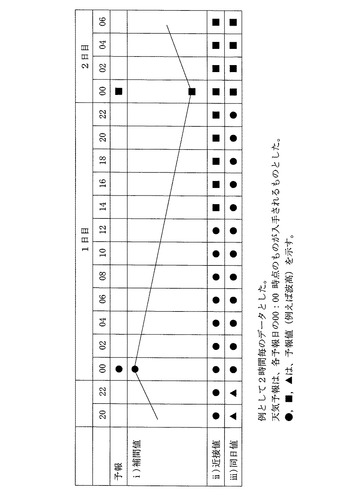
その時々の時刻における予報値を求める方法として、図4に示す三つの方法が考えられる。
以下の例として、各セルにおいて、天気予報の時刻が「一日目の00:00」のもの、「二日目の00:00」のもの、・・・というように一日毎の予報値が与えられるものとする。
【0014】
1)補間値を採用する方法
あるセル位置に船が存在すると、その時刻の天気予報値を、与えられている予報値の時刻の値から、時刻をもとに補間して求める。
例えば、A1セルを出発点に次の航路を演算する際、A1に船がいる時の時刻が、「一日目の06:00」とすると、その時の天気予報値(例えば波高)は、A1における「一日目の00:00」の予報値(波高)と、A1における「二日目の00:00」の予報値(波高)から補間して求める。補間方法は直線補間でも、なにがしかの曲線補間でも良い。
例)A1における「一日目の00:00」の予報値(波高)=5m、「二日目の00:00」の予報値(波高)=1mとすると、演算始点(A1:「一日目の00:60」)における予報値(波高)は、直線補間で求めると、(5m+(1m−5m)×6時間/24時間=)4mとなる。
【0015】
2)近接値を採用する方法
あるセル位置に船が存在するその時刻の天気予報値を、入手できる予報値、即ち与えられている予報値時刻に対して、より近い方の予報時刻の予報値を採用する。
上記の1)と同じ例では、A1に船がいる時刻が「一日目の06:00」であり、予報値が当てられている時刻としては、「二日目の00:00」よりも、「一日目の00:00」により近いので、この時刻(一日目の06:00)における航路演算には、「一日目の00:00」の予報値を用いる。演算を実行するときの時刻が、例えば「一日目の16:00」であれば、「二日目の00:00」の予報値を用いる。
なお、上記の例で与えられている予報値時刻に対して、ちょうど中間時刻(一日目の12:00)の演算をする場合には、「一日目の00:00」の予報値又は「二日目の00:00」の予報値のいずれかを選択して用いる。図4の例では、「一日目の00:00」の予報値を選択している。
【0016】
3)同日値を採用する方法
あるセル位置に船が存在するその時刻の天気予報値を、入手できる予報値、即ち与えられている予報値の同じ日にちの値を用いる。演算を実行する時の時刻が何時であっても、それが一日目の日にちの範囲内々であれば、「1日目の00:00」の値を採用する。
上記三つの方法では、補間値を採用する方法が、一番精度が高く、次に、近接値を採用する方法、最後に同日値を採用する方法の順に精度が落ちる。
【0017】
以上のように、実施の形態1によれば、運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データとに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上における船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたもので、船舶の航行に合わせた海気象状況予測の時間的/空間的変化も考慮することとなり、従来のような海気象状況の変化に伴う航路変更を考慮せずに生じる演算精度が低いということはなくなり、実際の航海途中における航路の変更が少なくて済み、また変更量も小さくなって、運航時間も短く、燃料消費量も少なくて済むというものである。
【図面の簡単な説明】
【0018】
【図1】本発明の実施の形態1に係る最適航路探索方法に用いられるシステムの構成を表す図。
【図2】同最適航路探索方法によって探索された最適航路を示す説明図。
【図3】同最適航路探索方法によって探索された最適航路を海気象データの変化を考慮して最小時間のものを探索する手順を示す説明図。
【図4】同最適航路探索方法によって最適航路を探索する場合に海域におけるある位置で天気予報値としてどの時刻のもの使用するかの確定方法を説明する図。
【符号の説明】
【0019】
1 本システム、2 外部の海気象予報装置、3 航路探索装置。
【技術分野】
【0001】
本発明は、船舶の最適な航路を探索する最適航路探索方法に関するものである。
【背景技術】
【0002】
船舶が航行する際には、外部の機関等から、現在、将来に関する様々な海気象に関するデータ(以下、海気象データという)が提供される(例えば特許文献1参照)。
そして、船舶の運航計画のためには、その計画時において入手した海気象状況を示す海気象データに基づいて最適航路を選定する必要がある。このような最適航路を選定する演算はウェザールーティングと呼ばれ、その演算に対して各種の最適解を求める手法が提案されており、また既に実用に供されている。ここでいう海気象状況とは、天気図(等圧線分布)、風(風速/風向)分布、波浪(波高/波周期/波向)分布、潮流(流速/流向)分布等を示す。
【特許文献1】特開昭61−247917号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来は、一航海(ある出発点からある到着点まで)の最適航路を求めるために使用される海気象状況を示す海気象データは、ある日時における予報値分布(空間分布)に基づくものであった。
しかしながら、演算上における航路を船舶が進んで行くに従って海気象状況も変化して行くが、従来の最適航路探索を行うための演算では、この船舶の航行に従って海気象状況も変化して行くという影響を考慮していないので、演算精度が低いという問題があった。
そのため、従来の演算された最適航路に基づいて実際に航行した場合には、航海途中における航路の変更も多く、また変更量も大きくなって、結果として最適な航海が実現されるものではなかった。
【0004】
そこで、本発明は上記のような問題点を解決し、運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データに基づいてある海域の出発点から到着点までについて最適航路を演算する際、演算上の船舶の航行に合わせて変化する海気象データを用いるようにした最適航路探索方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る最適航路探索方法は、運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたものである。
【発明の効果】
【0006】
本発明の最適航路探索方法によれば、運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたもので、船舶の航行に合わせた海気象状況予測の時間的/空間的変化も考慮することになり、従来のような海気象状況の変化に伴う航路変更を考慮せずに生じる演算精度が低いということはなくなり、実際の航海途中における航路の変更が少なくて済み、また変更量も小さくなって、運航時間も短く、燃料消費量も少なくて済むという効果がある。
【発明を実施するための最良の形態】
【0007】
実施の形態1.
図1は本発明の実施の形態1に係る最適航路探索方法に用いられるシステムの構成を表す図、図2は同最適航路探索方法によって探索された最適航路を示す説明図、図3は同最適航路探索方法によって探索された最適航路を海気象データの変化を考慮して最小時間のものを探索する手順を示す説明図、図4は同最適航路探索方法によって最適航路を探索する場合に海域におけるある位置で天気予報値としてどの時刻のもの使用するかの確定方法を説明する図である。
図1において、本システム1は、海気象データを予報する外部の海気象予報装置2と、その海気象予報装置2から何らかの通信手段を介して海気象データを含む信号を受信し、航路探索処理を行う航路探索装置3とから構成されている。
航路探索装置3は、運航計画時に船舶が固有に有する個船性能データと海気象予報装置2からの長期の海気象状況を示す海気象データとに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、演算上における船舶の航行に合わせて変化する船の位置、時刻で海気象データを変化させるものである。
【0008】
次に、本発明の実施の形態に係る最適航路探索方法について説明する。
この場合例として、1日目にある地点(出発点)を出発し、ほぼ4日後に到着点に達する航路を計算する。そして、天気予報(波浪、風、潮流の強さ/方向の予測分布)をもとに、出発点から到着点までどの航路を通れば最適(最小時間、最小燃費、等)かを演算するものである。
天気予報としては、出発日(1日目)から到着日(4日目)までの4種類(1日毎)の予報分布が入手されると仮定する。
そして、本発明の方法は、1日目の4日分の天気予報分布(図2では、分かり易くするために波高のみの天気予報分布)をもとに、航路探索装置3が出発点(図2の(a)の点(1)から、到着点(図2の(a)の点(4)までの最適航路を最適航路探索アルゴリズムを用いて算出する。なお、最適航路探索アルゴリズムには、ダイクストラ法に基づくものや、A* アルゴリズム法に基づくもの等がある。
【0009】
図2の(a)の実線は本発明方法による最適航路の演算結果を示している。従来の方法も1日目の最初の最適航路を演算するまでは本発明方法とほぼ同じであるが、演算に使用する天気予報分布は1日目の予報結果であり、演算上で船が点(1)から点(4)まで航行する間、この天気予報分布に固定されている。
しかし、実際の航海では、船が点(1)から、点(2)(二日目の到着予測点)、点(3)(三日目の到着予測点)、点(4)(四日目の到着予測点=到着点)まで移動するに従い、図2の(a)〜(d)に示すように、波高分布の予報値が変化してゆくので、この従来方法は正確でない。
【0010】
そこで、本発明は、船が移動するに従って、変化する海気象データの予報値を用いて演算するようにしたものである。
本発明では、最適航路を演算するに際して、船が移動するに従って、その時々の船の位置/時刻に対応する予報時刻/予報位置の天気予報分布の予報値(この例では4セットの中から選んだもの)を用いる。
例えば、一日目の航路演算(図2の(a)の点(1)から、(b)の黒丸の点(2)に到着する途中まで)には一日目の天気予報分布を使用する。
二日目の航路演算(二日目の到着点(b)の黒丸の点(2)前後)には、二日目の天気予報分布を使用する。以下同様にして到着点までの演算を、場所/時刻の変化に合わせて天気予報分布も変化させながら実行する。
このような、実際の船の航行により即した演算手法の結果求められる最適航路の結果例を、図2の(d)に実線で示す。図2の(b)〜(d)における破線は従来方法の最適航路の演算結果を示す。
従来手法による最適航路と、本発明による最適航路の結果は異なり、本発明の手法の方が現実的な現象をより正確に表現できる。
【0011】
次に、本発明の最適航路探索方法についてのある海域の出発地から目的地までの最適航路を演算する具体的な方法について図3に基づいて説明する。
最適航路の演算に、例として図3に示すような方法を用いる場合を考える。
ここでは、演算する航路を含む海域をある間隔の緯度/経度で分割し、各々の分割された海域(セルと呼ぶ)において、各予報時刻で天気予報が与えられるとする。
各セルの中心点を結んで航路を形成してゆく。ある点(例えば、図3のA1)から次に進むべき点(例えば図3のB1かA2かB2か)の選択は、最適航路の演算であれば、各々の経路(図3の各矢印)に必要な時間が最小のものを選んでゆく、といった手法をとる。このときの船速や必要時間の演算には各々のセル内の天気予報値(波高、波周期、波向き、風速、風向き、潮流速、潮流方向)を用いる。
【0012】
図3で、矢印は各セル間の経路を示し、実線矢印は最適航路を選んだ結果のものを、破線矢印は演算結果として最適でなかった経路を示す。また、●は最適航路として選ばれた航路上の経由点を示し、○は「最適でなかった」として選ばれなかった座標位置を示す。
各セル(座標位置)における天気予報値は、時間の経過と共に変化する。演算上、船がいる位置によって、各セルにおける天気予報値としてどの時刻のものを使用するかを決める必要がある。
【0013】
即ち、入手される海気象データの予報値はある時間間隔における複数のデータ群になっている。(例えば、7日先までの1日毎のデータ)その時間間隔の間の任意の時刻における予報値はないため、その時々の時刻における予報値を最適航路の演算のために求めることが必要となる。
その時々の時刻における予報値を求める方法として、図4に示す三つの方法が考えられる。
以下の例として、各セルにおいて、天気予報の時刻が「一日目の00:00」のもの、「二日目の00:00」のもの、・・・というように一日毎の予報値が与えられるものとする。
【0014】
1)補間値を採用する方法
あるセル位置に船が存在すると、その時刻の天気予報値を、与えられている予報値の時刻の値から、時刻をもとに補間して求める。
例えば、A1セルを出発点に次の航路を演算する際、A1に船がいる時の時刻が、「一日目の06:00」とすると、その時の天気予報値(例えば波高)は、A1における「一日目の00:00」の予報値(波高)と、A1における「二日目の00:00」の予報値(波高)から補間して求める。補間方法は直線補間でも、なにがしかの曲線補間でも良い。
例)A1における「一日目の00:00」の予報値(波高)=5m、「二日目の00:00」の予報値(波高)=1mとすると、演算始点(A1:「一日目の00:60」)における予報値(波高)は、直線補間で求めると、(5m+(1m−5m)×6時間/24時間=)4mとなる。
【0015】
2)近接値を採用する方法
あるセル位置に船が存在するその時刻の天気予報値を、入手できる予報値、即ち与えられている予報値時刻に対して、より近い方の予報時刻の予報値を採用する。
上記の1)と同じ例では、A1に船がいる時刻が「一日目の06:00」であり、予報値が当てられている時刻としては、「二日目の00:00」よりも、「一日目の00:00」により近いので、この時刻(一日目の06:00)における航路演算には、「一日目の00:00」の予報値を用いる。演算を実行するときの時刻が、例えば「一日目の16:00」であれば、「二日目の00:00」の予報値を用いる。
なお、上記の例で与えられている予報値時刻に対して、ちょうど中間時刻(一日目の12:00)の演算をする場合には、「一日目の00:00」の予報値又は「二日目の00:00」の予報値のいずれかを選択して用いる。図4の例では、「一日目の00:00」の予報値を選択している。
【0016】
3)同日値を採用する方法
あるセル位置に船が存在するその時刻の天気予報値を、入手できる予報値、即ち与えられている予報値の同じ日にちの値を用いる。演算を実行する時の時刻が何時であっても、それが一日目の日にちの範囲内々であれば、「1日目の00:00」の値を採用する。
上記三つの方法では、補間値を採用する方法が、一番精度が高く、次に、近接値を採用する方法、最後に同日値を採用する方法の順に精度が落ちる。
【0017】
以上のように、実施の形態1によれば、運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データとに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上における船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたもので、船舶の航行に合わせた海気象状況予測の時間的/空間的変化も考慮することとなり、従来のような海気象状況の変化に伴う航路変更を考慮せずに生じる演算精度が低いということはなくなり、実際の航海途中における航路の変更が少なくて済み、また変更量も小さくなって、運航時間も短く、燃料消費量も少なくて済むというものである。
【図面の簡単な説明】
【0018】
【図1】本発明の実施の形態1に係る最適航路探索方法に用いられるシステムの構成を表す図。
【図2】同最適航路探索方法によって探索された最適航路を示す説明図。
【図3】同最適航路探索方法によって探索された最適航路を海気象データの変化を考慮して最小時間のものを探索する手順を示す説明図。
【図4】同最適航路探索方法によって最適航路を探索する場合に海域におけるある位置で天気予報値としてどの時刻のもの使用するかの確定方法を説明する図。
【符号の説明】
【0019】
1 本システム、2 外部の海気象予報装置、3 航路探索装置。
【特許請求の範囲】
【請求項1】
運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたことを特徴とする最適航路探索方法。
【請求項2】
前記船舶の航行に合わせて変化する船の位置における海気象データの予報値は、ある時間間隔の時刻で与えられている海気象データの予報値であることを特徴とする請求項1記載の最適航路探索方法。
【請求項3】
前記船舶の航行に合わせて変化する船の位置における海気象データの予報値は、ある時間間隔で与えられている時刻以外については与えられている時刻の予報値の値から、時刻をもとに補間して求めたものであることを特徴とする請求項1記載の最適航路探索方法。
【請求項4】
前記船舶の航行に合わせて変化する船の位置における海気象データの予報値は、ある時間間隔で与えられている時刻以外については与えられている予報値の時刻に対して、より近い方の時刻の予報値であることを特徴とする請求項1記載の最適航路探索方法。
【請求項5】
前記船舶の航行に合わせて変化する船の位置における海気象データの予報値は、ある時間間隔で与えられている時刻以外については与えられている予報値の同じ日にちの予報値であることを特徴とする請求項1記載の最適航路探索方法。
【請求項1】
運航計画時に船舶が固有に有する個船性能データと長期の海気象状況を示す海気象データの予報値とに基づいて、ある海域の出発点から到着点までの最適航路を最適航路探索アルゴリズムを用いて演算する際、到着点に到達するまで一定時間経過毎に演算上の船舶の航行に合わせて変化する船の位置において、時間的/空間的に変化する海気象データの予報値を用いるようにしたことを特徴とする最適航路探索方法。
【請求項2】
前記船舶の航行に合わせて変化する船の位置における海気象データの予報値は、ある時間間隔の時刻で与えられている海気象データの予報値であることを特徴とする請求項1記載の最適航路探索方法。
【請求項3】
前記船舶の航行に合わせて変化する船の位置における海気象データの予報値は、ある時間間隔で与えられている時刻以外については与えられている時刻の予報値の値から、時刻をもとに補間して求めたものであることを特徴とする請求項1記載の最適航路探索方法。
【請求項4】
前記船舶の航行に合わせて変化する船の位置における海気象データの予報値は、ある時間間隔で与えられている時刻以外については与えられている予報値の時刻に対して、より近い方の時刻の予報値であることを特徴とする請求項1記載の最適航路探索方法。
【請求項5】
前記船舶の航行に合わせて変化する船の位置における海気象データの予報値は、ある時間間隔で与えられている時刻以外については与えられている予報値の同じ日にちの予報値であることを特徴とする請求項1記載の最適航路探索方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−145312(P2008−145312A)
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願番号】特願2006−334010(P2006−334010)
【出願日】平成18年12月12日(2006.12.12)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【Fターム(参考)】
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願日】平成18年12月12日(2006.12.12)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【Fターム(参考)】
[ Back to top ]