
有効視野測定システムおよび有効視野測定方法
【課題】車外の移動物体が存在する実際の道路で実際に運転中の運転者の有効視野をオンラインで求める有効視野測定システム等を提供する。
【解決手段】移動体検出部21は道路カメラ11により測定された車外の交通状況からオプティカルフローアルゴリズム等により車外の移動対象を検出する。移動情報計算部24は、検出された車外の移動対象が存在する移動対象領域を求める。注視領域計算部25は、ドライバモニタカメラ12の測定から得られたドライバ14の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求める。交差判断部26は、移動対象領域と注視領域とが交差するか否か判断する。有効視野計算部27は、交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する。
【解決手段】移動体検出部21は道路カメラ11により測定された車外の交通状況からオプティカルフローアルゴリズム等により車外の移動対象を検出する。移動情報計算部24は、検出された車外の移動対象が存在する移動対象領域を求める。注視領域計算部25は、ドライバモニタカメラ12の測定から得られたドライバ14の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求める。交差判断部26は、移動対象領域と注視領域とが交差するか否か判断する。有効視野計算部27は、交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の運転者の有効視野を測定する有効視野測定システム等に関する。
【背景技術】
【0002】
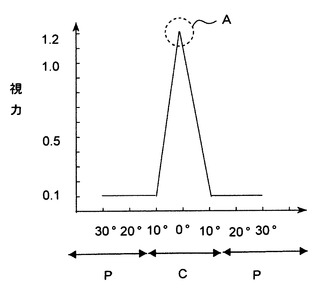
一般に、人の視野とは目を動かさずに見える範囲とされている。図10は、人の視野を説明するためのグラフを示す。図10で、横軸は視野の角度、縦軸は視力である。図10に示されるように、目を向けている点(注視点A)を角度0°とすると、注視点Aから左右13°(視角26°。中心視C)の範囲では視力は約1.2と良好であるが、視野の周辺部の範囲(周辺視P)では視力は約0.1と急に低くなっている。周辺視Pで物体を認知することができる範囲を有効視野と呼ぶ。有効視野は年齢、性別等により異なると言われている。自動車等の運転者のように、動いている状態で車外を見る場合、有効視野が重要となる。この場合、有効視野は年齢、性別等に加えて、走行状況、道路状況、心理状態、個人差により異なると言われている。
【0003】
従来、自動車等の運転者の有効視野を測定する方法として、フロントガラス上に格子状の目盛を設け、運転者にその視線を検知するためのアイカメラ(ヘッドマウントカメラ)を取付けて、運転者が車外の物体を格子に合わせて見る際の目をアイカメラで撮影することにより、視線ベクトルを検出する方法が用いられてきた。この方法では、フロントガラス上の格子を利用して運転者の注視点を測定していた。
【0004】
自動車等の運転者の有効視野を測定する別の方法として、自動車のフロントガラス上に格子状の目盛を設け、ある格子に光点を表示した後に別の格子に光点を表示して、運転者が当該別の光点の表示を認知するまでの時間(認知時間)を測定し、ある光点と別の光点と間の距離および角度を変化させて認知時間との関係を調べる方法もある。この方法でも、フロントガラス上の格子を利用して運転者の注視点を測定していた。
【0005】
有効視野を測定する別の方法として、被験者に対しパーソナルコンピュータ(PC)の画面上に人為的に設定したいくつかの絵を見せて、その反応時間を測定する方法がある(非特許文献1参照)。より具体的には、PCの画面上に1台の自動車の絵を表示してから、画面上の別の位置に別の自動車の絵を表示させ、当該別の自動車の絵が表示されたことを認知するまでの認知時間を測定するという方法である。この方法はオフラインのPCの画面を利用して、被験者の注視点を測定していた。
【0006】
以上の測定方法は、フロントガラス上の格子またはオフラインのPCの画面上の絵を利用して運転者または被験者の注視点を測定するものであり、実際の運転走行時における外部の物体を直接利用した測定方法ではないという問題があった。非特許文献2は実際の運転走行時における有効視野を測定する方法を示している。より詳しくは、フロントガラス面にダッシュボードより約20cmの高さに赤色LED8個を取付けた棒を設置し、自動車教習所等で走行する運転者に、LEDの点灯を感じた時に合図を求めるという方法である。非特許文献2の方法は実際の運転走行時ではあるが実際の道路の運転走行時ではなく、さらに車内のLEDの点灯を利用したものであって実車の外部の物体を直接利用した測定方法ではないという問題があった。
【0007】
特許文献1は実際の運転走行時における有効視野を測定する別の方法を示している。より詳しくは、運転者の顔の角度および車速度による標準視野、対象物と自車との間の相対速度および距離等に基づき、対象物が運転者の標準視野に入っているか否かを判断し、警報を発するというものである。
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、自動車等の運転者の有効視野は年齢、性別等に加えて、走行状況、道路状況、心理状態、個人差により異なると言われている。特許文献1に記載された方法は一般的な標準視野に基づく方法であり、実際に運転している運転者の有効視野を測定する方法ではないという問題があった。そこで、本発明の目的は、上記問題を解決するためになされたものであり、車外の移動物体が存在する実際の道路で実際に運転中の運転者の有効視野をオンラインで求める有効視野測定システム等を提供することにある。
【課題を解決するための手段】
【0009】
この発明の有効視野測定システムは、車両の運転者の有効視野を測定する有効視野測定システムであって、車外の交通状況を測定する第1撮像器と、運転者を測定する第2撮像器と、第1撮像器及び第2撮像器に接続されたコンピュータとを備え、第1撮像器の測定から検出された車外の移動対象と第2撮像器の測定から得られた実運転中の運転者の視線計測情報とに基づき、コンピュータが実運転中の運転者の有効視野をオンラインで計算することを特徴とする。
【0010】
ここで、この発明の有効視野測定システムにおいて、前記コンピュータは、第1撮像器により測定された車外の交通状況を交通状況記録部に記録すると共に該交通状況から所定の動物体解析手法により車外の移動対象を検出する移動対象検出手段と、第1撮像器により測定された車外の交通状況から車両が走行中であることを確認する走行確認手段と、前記走行確認手段により車両が走行中であることが確認され且つ前記移動対象検出手段により車外の移動対象が検出された場合、第2撮像器により測定された運転者の視線計測情報の視線計測記録部への記録を開始させる視線計測記録開始手段と、前記走行確認手段により車両が走行中であることが確認され且つ前記移動対象検出手段により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める移動情報計算手段と、前記視線計測記録開始手段により開始され前記視線計測記録部に記録された運転者の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に該注視領域に関連する視線計測情報を出力する注視領域計算手段と、前記移動情報計算手段により求められた移動対象領域と前記注視領域計算手段により求められた注視領域とが交差するか否か判断する交差判断手段と、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する有効視野計算手段とを備えることができる。
【0011】
ここで、この発明の有効視野測定システムにおいて、第1撮像器により測定された車外の交通状況から前記移動対象検出手段により検出された車外の移動対象が車両の前方を通過したか否かを確認する通過確認手段と、前記交差判断手段により移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認手段により車外の移動対象が車両の前方を通過したと確認されなかった場合、前記移動情報計算手段、前記注視領域計算手段及び前記交差判断手段を繰り返す繰り返し手段とをさらに備えることができる。
【0012】
ここで、この発明の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認手段により車外の移動対象が車両の前方を通過したと確認された場合、車外の移動対象の検出を終了させる検出終了手段をさらに備えることができる。
【0013】
ここで、この発明の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記交通状況記録部に記録された過去の交通状況に基づき、前記移動対象検出手段により検出された車外の移動対象が出現した時点を求める移動対象出現時点計算手段をさらに備え、前記有効視野計算手段は、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報と前記移動対象出現時点計算手段により求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することができる。
【0014】
ここで、この発明の有視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報手段をさらに備えることができる。
【0015】
ここで、この発明の有効視野測定システムにおいて、第1撮像器は車両のフロントガラス後部に設置することができる。
【0016】
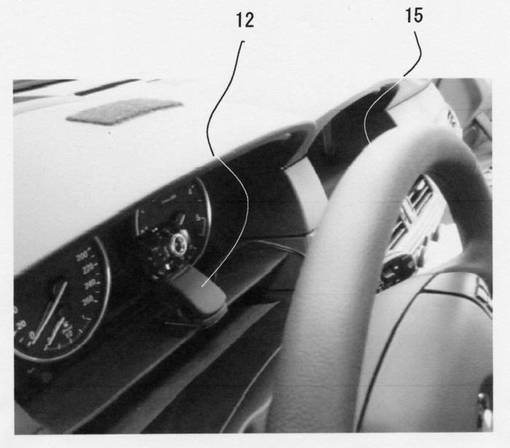
ここで、この発明の有効視野測定システムにおいて、第2撮像器は車両のハンドル後部に設置することができる。
【0017】
この発明の有効視野測定方法は、車両の運転者の有効視野を測定する有効視野測定方法であって、車外の交通状況を測定する第1撮像器と、運転者を測定する第2撮像器と、第1撮像器及び第2撮像器に接続されたコンピュータとを用いるものであり、コンピュータが、第1撮像器の測定から検出された車外の移動対象と第2撮像器の測定から得られた実運転中の運転者の視線計測情報とに基づき、実運転中の運転者の有効視野をオンラインで計算することを特徴とする。
【0018】
ここで、この発明の有効視野測定方法において、第1撮像器により測定された車外の交通状況を交通状況記録部に記録すると共に該交通状況から所定の動物体解析手法により車外の移動対象を検出する移動対象検出ステップと、第1撮像器により測定された車外の交通状況から車両が走行中であることを確認する走行確認ステップと、前記走行確認ステップで車両が走行中であることが確認され且つ前記移動対象検出ステップで車外の移動対象が検出された場合、第2撮像器により測定された運転者の視線計測情報の視線計測記録部への記録を開始させる視線計測記録開始ステップと、前記走行確認ステップで車両が走行中であることが確認され且つ前記移動対象検出ステップで車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める移動情報計算ステップと、前記視線計測記録開始ステップで開始され前記視線計測記録部に記録された運転者の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に該注視領域に関連する視線計測情報を出力する注視領域計算ステップと、前記移動情報計算ステップで求められた移動対象領域と前記注視領域計算ステップで求められた注視領域とが交差するか否か判断する交差判断ステップと、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する有効視野計算ステップとを備えることができる。
【0019】
ここで、この発明の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断されなかった場合、第1撮像器により測定された車外の交通状況から前記移動対象検出ステップで検出された車外の移動対象が車両の前方を通過したか否かを確認する通過確認ステップと、前記通過確認ステップで車外の移動対象が車両の前方を通過したと確認されなかった場合、前記移動情報計算ステップ、前記注視領域計算ステップ及び前記交差判断ステップを繰り返す繰り返しステップとをさらに備えることができる。
【0020】
ここで、この発明の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認ステップで車外の移動対象が車両の前方を通過したと確認された場合、車外の移動対象の検出を終了させる検出終了ステップをさらに備えることができる。
【0021】
ここで、この発明の有効視野測定方法において、前記有効視野計算ステップに先立ち、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記交通状況記録部に記録された過去の交通状況に基づき、前記移動対象検出ステップで検出された車外の移動対象が出現した時点を求める移動対象出現時点計算ステップをさらに備え、前記有効視野計算ステップは、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報と前記移動対象出現時点計算ステップで求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することができる。
【0022】
ここで、この発明の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報ステップをさらに備えることができる。
【発明の効果】
【0023】
本発明の有効視野測定システム等によれば、移動体検出部は道路カメラにより測定された車外の交通状況を交通状況データベース(DB)に記録すると共に、当該交通状況から所定の動物体解析手法(例えばオプティカルフローアルゴリズム等)により車外の移動対象を検出する。走行確認部は道路カメラにより測定された車外の交通状況から自動車が走行中であることを確認する。視線計測記録開始部は、走行確認部により自動車が走行中であることが確認され且つ移動対象検出部により車外の移動対象が検出された場合、ドライバモニタカメラにより測定されたドライバの視線計測情報の視線計測DBへの記録を開始させる。移動情報計算部は、走行確認部により自動車が走行中であることが確認され且つ移動対象検出部により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める。注視領域計算部は、視線計測記録開始部により開始され視線計測DBに記録されたドライバの視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に、当該注視領域に関連する視線計測情報を出力する。交差判断部は、移動情報計算部により求められた移動対象領域と注視領域計算部により求められた注視領域とが交差するか否か判断する。有効視野計算部は、交差判断部により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する。
【0024】
以上のようにして、本発明の有効視野測定システムによれば、道路カメラの測定から検出された車外の移動対象とドライバモニタカメラの測定から得られた実運転中の運転者の視線ベクトルを含む視線計測情報とに基づき、コンピュータが実運転中の運転者の有効視野をオンラインで計算するため、車外の移動物体が存在する実際の道路で実際に運転中のドライバの有効視野をオンラインで求めることができるという効果がある。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例1における自動車(車両)のドライバ(運転者)の有効視野を測定する有効視野測定システム10を示す図である。
【図2】ドライバモニタカメラ12の設置状態を示す図である。
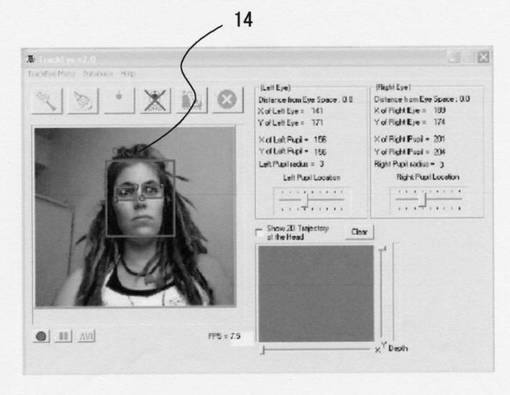
【図3】ドライバモニタリングシステムを用いてドライバ14を撮像した様子を示す図である。
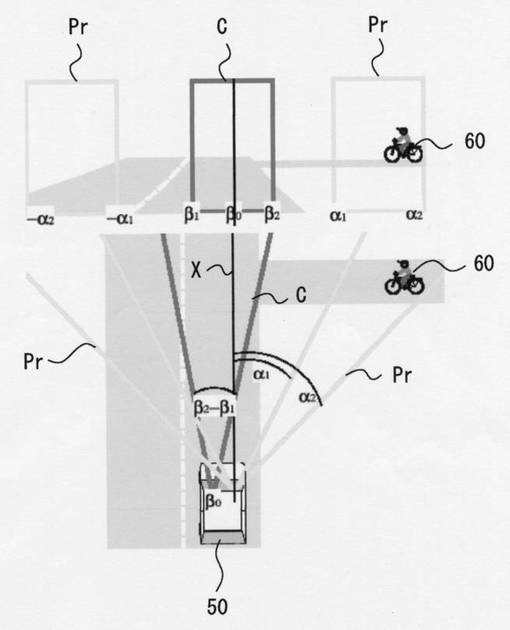
【図4】測定座標系における3つのイメージ領域を説明するための概念図である。
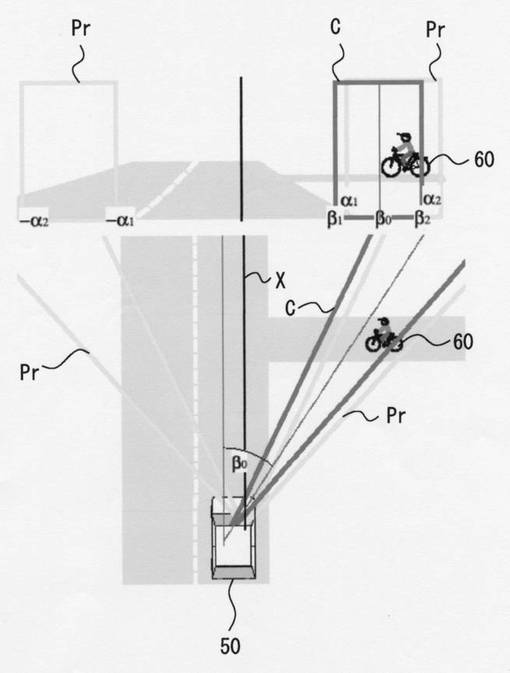
【図5】ドライバ14が右側の自転車60を見た状況を示す図である。
【図6】オプティカルフローアルゴリズムによる歩行者および自転車の検出を4枚のフレームで示す図である。
【図7】ドライバ14の有効視野を説明する4枚のフレームを示す図である。
【図8】本発明の実施例1における有効視野測定システム10および有効視野測定方法における処理の流れを示すフローチャートである。
【図9】RITによる解析結果例を示す図である。
【図10】人の視野を説明するためのグラフを示す図である。
【発明を実施するための最良の形態】
【0026】
以下、実施例について図面を参照して詳細に説明する。
【実施例1】
【0027】
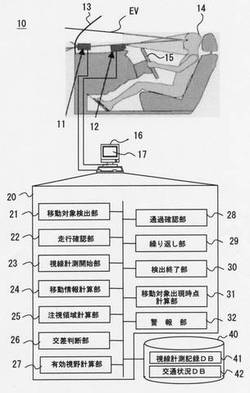
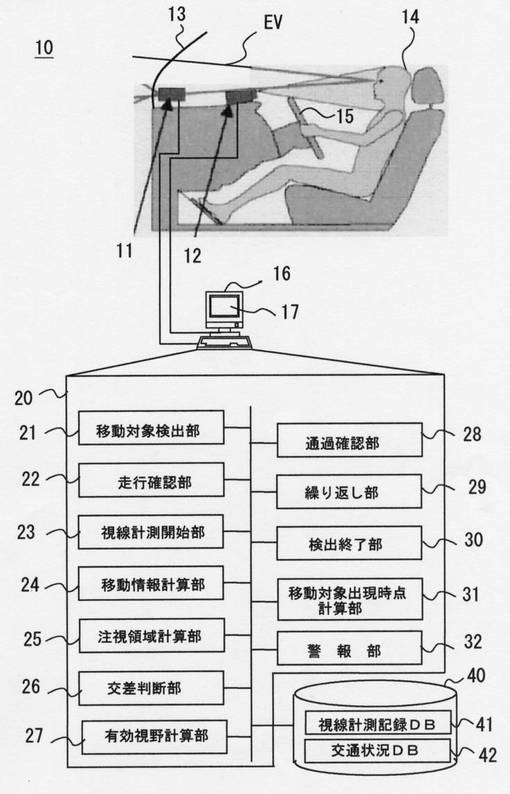
図1は、本発明の実施例1における自動車(車両)のドライバ(運転者)の有効視野を測定する有効視野測定システム10を示す。図1において、符号11は車外の交通状況を測定する道路カメラ(第1撮像器)、12はドライバ14を測定するドライバモニタカメラ(第2撮像器)、13はフロントガラス、15はハンドル、EVはドライバの視線ベクトル、16は道路カメラ11およびドライバモニタカメラ12に接続されたコンピュータ、17はコンピュータ16のディスプレイ、20はコンピュータ16の機能を示す機能ブロック、40はコンピュータ16に接続されたハードディスク等の記録装置、41はドライバ14の視線ベクトルEVを含む視線計測情報を記録した視線計測情報データベース(DB)(視線計測情報記録部)、42は道路カメラ11により測定された車外の交通状況を記録した交通状況DB(交通状況記録部)である。図1で自動車の全体図は省略してある。有効視野測定システム10は、道路カメラ11の測定から検出された車外の移動対象とドライバモニタカメラ12の測定から得られた実運転中の運転者14の視線ベクトルEVを含む視線計測情報とに基づき、コンピュータ16が実運転中の運転者14の有効視野をオンラインで計算する。
【0028】
図2は、ドライバモニタカメラ12の設置状態を示す。図2で図1と同じ符号を付した箇所は同じ要素を示すため、説明は省略する。図2に示されるように、ドライバモニタカメラ12は自動車のハンドル15の後部に設置することが好適である。図2ではドライバモニタカメラ12は計器類と同じ位置に設置されているが、設置箇所は当該位置に限定されるものではなく、運転の邪魔にならない箇所、例えばダッシュボードの上に設置してもよい。ドライバモニタカメラ12は、コンピュータ16にUSB等で接続された低コストのいわゆるウェブカエラとし、ドライバモニタリングシステムとしては、例えばTrackEye(登録商標)と呼ばれるソフトウェアを用いることができる。図3は、ドライバモニタリングシステムを用いてドライバ14を撮像した様子を示す。TrackEye(登録商標)は図3に示されるようにドライバ14の顔および目を検知し、ドライバ14の注視点の測定を行う。上述の例ではドライバモニタカメラ12としてTrackEye(登録商標)を例示したが、1秒あたりのフレーム数がより高い、例えばFaceLab sysytemを用いる方が好適である。
【0029】
道路カメラ11は、ドライバ14の周辺視P(図10参照。以下同様)の範囲において左右から出現した道路交通状況における対象物を検出する。道路カメラ11は、自動車のフロントガラス13の後部に設置することが好適である(図1参照)。例えば、バックミラーの左側または右側に取り付ければよい。道路カメラ11は、例えばuEye UI-1225LEM(IDS(登録商標)-imaging社製)を用い、コンピュータ16とはUSBで接続した。ドライバ14の周辺視Pから道路交通状況における対象物を追跡するためには、レンズは広角レンズ(例えば125°)とすることが好適である。撮像した各フレームはタイムスタンプを付けられて交通状況DB42に記録される。
【0030】
次に、発明者らが使用した測定座標系について説明する。図4は、測定座標系における3つのイメージ領域を説明するための概念図である。図4において、符号50は自動車、60は道路交通状況における対象物(図4では自転車を例示)、Cはドライバ14の中心視(原図では赤色で表示)、Prは道路カメラ11で撮像される周辺領域(原図では黄色で表示)である。3つのイメージ領域とは中心視Cと左右2つの周辺領域Prである。図4の上部は道路カメラ11のイメージフレームを示し、下部は上からの全体図を示す。図4に示されるように、中心視Cは角度β(β1からβ2までの範囲)で示され、周辺領域Prは角度パラメータα(進行方向左側では−α2から−α1までの範囲、進行方向右側ではα1からα2までの範囲)で示されている。角度パラメータαは道路カメラ11の進行方向における中心線Xからとられている。上記125°の広角レンズの場合、角度パラメータα2は62.5°となる。角度パラメータα1は周辺領域Prの内側における限界を示し、例えば30°とした。しかし、ドライバ14の中心視Cおよび周辺視Pに合わせて他の値としてもよい。ドライバ14の中心視Cの領域はβ2−β1で示され、ドライバ14の視角β0により変化する。β2−β1は背景技術で説明した視角26°とした。視角β0は上述したドライバモニタカメラ12を用いたドライバモニタリングシステムの出力結果であり、画像の品質等に依存する。なお、図4で中心視Cの原点と周辺領域Prの原点とがずれているのは、道路カメラ11とドライバ14の頭部との間の距離が約1m離れていることを反映させたためである。
【0031】
図5は、ドライバ14が右側の自転車60を見た状況を示す。図5で図4と同じ符号を付した箇所は同じ要素を示すため、説明は省略する。ドライバ14は図4に示されるように最初は前方を注視しているが、周辺視Pで自転車60を認知すると、図5に示されるように中心視Cで自転車60を注視する。ドライバ14が自転車60を注視したということはドライバ14が自転車を認知したものと考えることができる。そこで、自転車60が周辺領域Prに出現してからドライバ14が中心視Cで自転車60を捉えるまでの時間を測定すれば、ドライバ14が自転車60を認知するまでの認知時間を得ることができる。自転車60が周辺領域Prに出現した時間は、道路カメラ11により撮像され交通状況DB42に記録された各フレームに基づき得ることができる。ドライバ14が中心視Cで自転車60を捉えたことは、ドライバモニタリングシステムにより得られた図5に示される視角β0が道路カメラ11の角度パラメータα1からα2の範囲に入ったことにより検出することができる。言い換えれば、道路カメラ11の周辺領域Prとドライバ14の中心視Cとが交差したことを検出することにより、上記認知時間を得ることができる。ドライバ14の有効視野は図5に示される視角β0となる。
【0032】
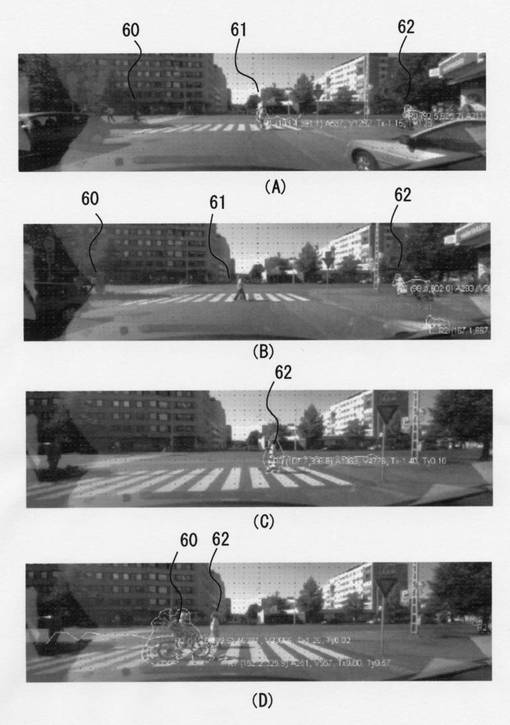
以下、上述した説明および図4、5を適宜用いて、図1に示される機能ブロック20に示される諸機能について説明する。当該諸機能はソフトウェアにより実現されているが、一部はハードウェアにより実現してもよい。移動対象検出部21(移動対象検出手段)は、道路カメラ11により測定された自動車50の外の交通状況を交通状況DB42に記録すると共に、当該交通状況から所定の動物体解析手法により自動車50の外の移動対象(例えば、図4等における自転車60)を検出する。交通状況DB42への記録は、上述したように道路カメラ11が撮像した各フレームにタイムスタンプを付けて記録される。所定の動物体解析手法としては既存技術であるオプティカルフローアルゴリズムによる解析手法が好適である。発明者らはHalcon(登録商標) machine vision library function(optical_flow_mg())を使用した。詳細は、Halcon(登録商標)reference manual(http://www/mvtec.com/download/documentation/reference-9.0/hdevelop/optical_flow_mg.html)を参照されたい。移動対象の追跡にはddrawアルゴリズムまたはfdrigアルゴリズムが好適である。例えば、ddrawアルゴリズムにより、図5に示される自転車60の右方向からの接近を検知することができる。図6は、オプティカルフローアルゴリズムによる歩行者および自転車の検出を4枚のフレームで示す。図6(A)から(D)はこの順に道路カメラ11で撮像されたフレームである。図6(A)のフレームに示されるように、左側に自転車60が見え、右側に歩行者61および62が見える。周知のように、オプティカルフローアルゴリズムは、連続するフレーム間で移動方向および強さを示すベクトルを計算する。図6(A)の歩行者61に付して示されるように、ベクトルは(原図では赤い)矢印で示されている。各移動対象はフレーム内の中間点まで追跡される。例えば、図6(B)では歩行者61にはベクトルは付されておらず、もはや追跡されていない。原図では最も重要な移動対象は白色で表示され、2番目に重要な移動対象は黄色で表示されている。例えば図6(A)では歩行者61が白色で表示され、歩行者62は黄色で表示されている。図6(C)では歩行者62が白色で表示されている。図6(D)では歩行者62にはベクトルは付されておらず、もはや追跡されていない。一方、自転車60は白色で表示され、ベクトルが付されている。
【0033】
走行確認部22(走行確認手段)は、道路カメラ11により測定された自動車50の外の交通状況から自動車50が走行中であることを確認する。より詳しくは、自動車50が進行方向の急回転等ではない、正常な運転状態であることを確認する。進行方向の急回転等では背景が水平方向に急にシフトするため、オプティカルフローアルゴリズムに悪影響を及ぼすからである。急加速、急減速も車体が上下に動くため、背景も上下に動くことなり、正常な運転状態ではない。長時間の停車も正常な運転状態とはされない。例えば、信号による停止では、ドライバ14の車外の物体に対する注意がそれることが多いため、ドライバモニタカメラ12による監視が意味をもたなくなるからである。但し、横断歩道前の一時停止のような場合は正常な運転状態である。正常な運転状態であることの確認は、Halcon(登録商標)のfdrigアルゴリズムによりオプティカルフローを計測し、背景の動き(背景差分データ)から走行中であることを確認することができる。
【0034】
視線計測記録開始部23(視線計測記録開始手段)は、走行確認部22により自動車50が走行中であることが確認され、且つ移動対象検出部21により車外の移動対象が検出された場合、ドライバモニタカメラ12により測定された運転者14の視線計測情報の視線計測DB41への記録を開始させる。即ち、車外の移動対象の動きとドライバ14の視角とが共に測定される。測定の終了時刻は車外の移動対象の位置と速度とに依存する。視線計測情報には、図4または5に示されたドライバ14の中心視Cに関する情報(視角β0、ドライバ14の顔画像等)が測定時刻と共に記録される。
【0035】
移動情報計算部24(移動情報計算手段)は、走行確認部22により自動車50が走行中であることが確認され、且つ移動対象検出部21により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める。具体的には、図6に示されるようなフレーム内で歩行者61等が存在する画像上の領域を、ベクトルに基づき移動対象領域として求める。
【0036】
注視領域計算部25(注視領域計算手段)は、視線計測記録開始部23により開始され視線計測DB41に記録されたドライバ14の視線計測情報に基づき、実運転中のドライバ14が見ている注視領域(図4または5に示されたドライバ14の中心視Cの領域)を求める。さらに、当該注視領域に関連する視線計測情報を出力する。
【0037】
交差判断部26(交差判断手段)は、移動情報計算部24により求められた移動対象領域と注視領域計算部25により求められた注視領域とが交差するか否かを判断する。上述したように、道路カメラ11の周辺領域Prとドライバ14の中心視Cとが交差したか否かにより判断することができる。
【0038】
有効視野計算部27(段有効視野計算手段)は、交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、実運転中のドライバ14の有効視野(図4または5に示されたドライバ14の視角β0)を計算する。
【0039】
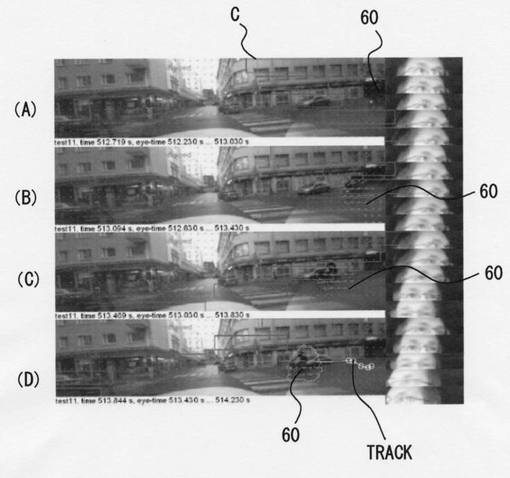
図7は、ドライバ14の有効視野を説明する4枚のフレームを示す。図7(A)から(D)はこの順に道路カメラ11で撮像されたフレームである。図7(A)から(D)に示されるように、自動車50は交差点で一時停止し、画像の右側から自転車60が近づいてきている。ドライバ14の中心視Cは矩形(原図では赤色で表示)で表示されている。図7(A)から(D)の各フレームには、ドライバモニタカメラ12で撮像された対応する5枚のフレーム(ドライバ14の顔画像)が時間順に右側に付されている。この5枚のフレームに対応するドライバ14の5つの中心視Cが道路カメラ11で撮像された各フレーム中に重ねて表示されている。例えば、図7(A)では、ドライバ14の顔画像が次第に右側を向いており、これに対応して中心視Cも次第に右側へ移動している。
【0040】
図7(A)に示されるように、移動対象検出部21が道路カメラ11により測定された自動車50の外の交通状況を交通状況DB42に記録すると共に、当該交通状況からオプティカルフローアルゴリズム等の動物体解析手法により自動車50の外の移動対象(例えば、自転車60)を検出する。走行確認部22は、道路カメラ11により測定された自動車50の外の交通状況から自動車50が走行中であることを確認する。上述したように自動車50は交差点で一時停止した状況であるため、正常な運転状態であると確認される。視線計測記録開始部23は、走行確認部22により自動車50が走行中であることが確認され、且つ移動対象検出部21により車外の移動対象(自転車60)が検出されたため、ドライバモニタカメラ12により測定された運転者14の視線計測情報の視線計測DB41への記録を開始させる。移動情報計算部24は、走行確認部22により自動車50が走行中であることが確認され、且つ移動対象検出部21により車外の移動対象(自転車60)が検出されたため、検出された車外の移動対象(自転車60)が存在する移動対象領域を求める。具体的には、図7(A)等に示されるようなフレーム内で自転車60が存在する画像上の領域を、ベクトルに基づき移動対象領域として求める(原図では緑色で表示)。注視領域計算部25は、視線計測記録開始部23により開始され視線計測DB41に記録されたドライバ14の視線計測情報に基づき、実運転中のドライバ14が見ている注視領域(図7(A)等に表示されたドライバ14の中心視C)を求める。さらに、当該注視領域に関連する視線計測情報を出力する。交差判断部26は、移動情報計算部24により求められた移動対象領域(原図では緑色で表示された領域)と注視領域計算部25により求められた注視領域(原図では赤色で表示された矩形で示される中心視C)とが交差するか否かを判断する。有効視野計算部27は、図7(B)で示されるように交差判断部26により移動対象領域と注視領域とが交差すると判断されたため、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、実運転中のドライバ14の有効視野(図4または5に示されたドライバ14の視角β0)を計算する。
【0041】
通過確認部28(通過確認手段)は、道路カメラ11により測定された車外の交通状況から、移動対象検出部21により検出された車外の移動対象が自動車50の前方を通過したか否かを確認する。繰り返し部29(繰り返し手段)は、交差判断部26により移動対象領域と注視領域とが交差すると判断されず、且つ通過確認部28により車外の移動対象が自動車50の前方を通過したと確認されなかった場合、移動情報計算部24、注視領域計算部25および交差判断部26の各処理を繰り返す。
【0042】
検出終了部30(検出終了手段)は、交差判断部26により移動対象領域と注視領域とが交差すると判断されず、且つ通過確認部28により車外の移動対象が自動車50の前方を通過したと確認された場合、車外の移動対象の検出を終了させる。
【0043】
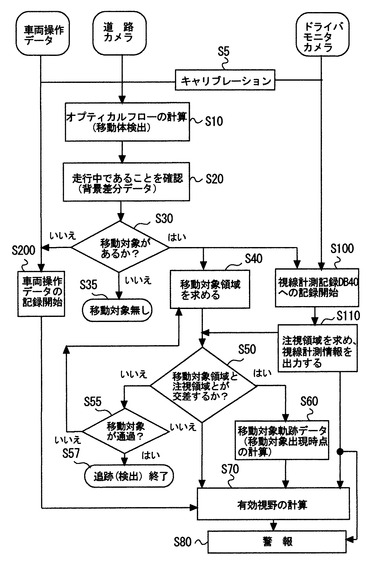
図8は、本発明の実施例1における有効視野測定システム10および有効視野測定方法における処理の流れをフローチャートで示す。有効視野測定方法は、自動車50のドライバ14の有効視野を測定する有効視野測定方法であって、道路カメラ11と、ドライバモニタカメラ12と、コンピュータ16とを用いるものであり、コンピュータ16が、道路カメラ11の測定から検出された車外の移動対象とドライバモニタカメラ12の測定から得られた実運転中の運転者14の視線ベクトルEVを含む視線計測情報とに基づき、コンピュータ16が実運転中の運転者14の有効視野をオンラインで計算する方法である。図8に示されるように、まず、車両操作データ(ハンドル、アクセル、ブレーキ等)の取得と、道路カメラ11と、ドライバモニタカメラ12との間でキャリブレーションを行って同期をとる(ステップS5)。
【0044】
次に、道路カメラ11により測定された車外の交通状況を交通状況DB42に記録すると共に、当該交通状況から所定の動物体解析手法(例えばオプティカルフローアルゴリズム等)により車外の移動対象を検出する(移動対象検出ステップ。ステップS10)。
【0045】
道路カメラ11により測定された車外の交通状況から自動車50が走行中であることを確認する(走行確認ステップ。ステップS20)。
【0046】
走行確認ステップ(ステップS20)で自動車50が走行中であることが確認され且つ移動対象検出ステップ(ステップS10)で車外の移動対象が検出された場合、ドライバモニタカメラ12により測定されたドライバ14の視線計測情報の視線計測DB41への記録を開始させる(視線計測記録開始ステップ。ステップS30、S100)。
【0047】
走行確認ステップ(ステップS20)で自動車50が走行中であることが確認され且つ移動対象検出ステップ(ステップS10)で車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める(移動情報計算ステップ。ステップS30、S40)。
【0048】
視線計測記録開始ステップ(ステップS100)で開始され視線計測DB41に記録されたドライバ14の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に、当該注視領域に関連する視線計測情報を出力する(注視領域計算ステップ。ステップS110)。
【0049】
移動情報計算ステップ(ステップS40)で求められた移動対象領域と注視領域計算ステップ(ステップS110)で求められた注視領域とが交差するか否か判断する(交差判断ステップ。ステップS50)。
【0050】
交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断された場合、注視領域計算ステップ(ステップS110)で出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する(有効視野計算ステップ。ステップS70)。ステップS60は飛ばし、実施例2で説明する。
【0051】
交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断されなかった場合、道路カメラ11により測定された車外の交通状況から移動対象検出ステップ(ステップS10)で検出された車外の移動対象が自動車50の前方を通過したか否かを確認する(通過確認ステップ。ステップS55)。通過確認ステップ(ステップS55)で車外の移動対象が自動車50の前方を通過したと確認されなかった場合、移動情報計算ステップ(ステップS40)へ戻り、注視領域計算ステップ(ステップS110)および交差判断ステップ(ステップS50)を繰り返す(繰り返しステップ)。
【0052】
交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断されず、且つ通過確認ステップ(ステップS55)で車外の移動対象が自動車50の前方を通過したと確認された場合、車外の移動対象の検出を終了させる(検出終了ステップ。ステップS57)。
【0053】
図8に示されるフローチャートに示されるように、ステップS30で移動対象があると判断されなかった場合、車両操作データ(ハンドル、アクセル、ブレーキ等)の車両操作データDB(不図示)への記録を開始させる(ステップS200)。これはドライバ14が移動対象(不図示)との衝突を回避するために自動車50を減速させたり、進路を変えたりすることにより、移動対象を認知した可能性があるためである。このようなドライバ14の挙動結果である車両データを有効視野の計算に用いることもできる。勿論、ステップS30で移動対象があると判断されなかった場合、移動対象無しとして終了させることも可能である(ステップS35)。交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断されなかった場合、有効視野計算ステップ(ステップS70)へ進む流れもある。これは、ドライバ14が移動対象に気づかなかった場合でも、狭い有効視野として計算することも可能だからである。
【0054】
以上のように、本発明の実施例1によれば、有効視野測定システム10は、道路カメラ11の測定から検出された車外の移動対象とドライバモニタカメラ12の測定から得られた実運転中の運転者14の視線ベクトルEVを含む視線計測情報とに基づき、コンピュータ16が実運転中の運転者14の有効視野をオンラインで計算する。まず、車両操作データ(ハンドル、アクセル、ブレーキ等)の取得と、道路カメラ11と、ドライバモニタカメラ12との間でキャリブレーションを行って同期をとる。次に、移動体検出部21は道路カメラ11により測定された車外の交通状況を交通状況DB42に記録すると共に、当該交通状況から所定の動物体解析手法(例えばオプティカルフローアルゴリズム等)により車外の移動対象を検出する。走行確認部22は道路カメラ11により測定された車外の交通状況から自動車50が走行中であることを確認する。視線計測記録開始部23は、走行確認部22により自動車50が走行中であることが確認され且つ移動対象検出部21により車外の移動対象が検出された場合、ドライバモニタカメラ12により測定されたドライバ14の視線計測情報の視線計測DB41への記録を開始させる。移動情報計算部24は、走行確認部22により自動車50が走行中であることが確認され且つ移動対象検出部21により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める。注視領域計算部25は、視線計測記録開始部23により開始され視線計測DB41に記録されたドライバ14の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に、当該注視領域に関連する視線計測情報を出力する。交差判断部26は、移動情報計算部24により求められた移動対象領域と注視領域計算部25により求められた注視領域とが交差するか否か判断する。有効視野計算部27は、交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する。
【0055】
ドライバ14の有効視野は年齢、性別等に加えて、道路状況、心理状態、個人差により異なると言われている。本発明の実施例1における有効視野測定システム10によれば、道路カメラ11の測定から検出された車外の移動対象とドライバモニタカメラ12の測定から得られた実運転中の運転者14の視線ベクトルEVを含む視線計測情報とに基づき、コンピュータ16が実運転中の運転者14の有効視野をオンラインで計算するため、車外の移動物体が存在する実際の道路で実際に運転中のドライバ14の有効視野をオンラインで求めることができる。
【0056】
上述したように、自転車60が周辺領域Prに出現してからドライバ14が中心視Cで自転車60を捉えるまでの時間を測定すれば、認知時間を得ることができる(図5参照)。この認知時間を有効視野の計算に利用することも可能である。
【実施例2】
【0057】
実施例2では、実施例1における交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、交通状況DB42に記録された過去の交通状況に基づき、移動対象検出部21により検出された車外の移動対象が出現した時点を求める移動対象出現時点計算部31(移動対象出現時点計算手段)をさらに備えることができる(図1参照)。即ち、交通状況DB42に記録された過去の交通状況から移動対象の軌跡データを遡り、移動対象が出現した時点を求めることができる。移動対象出現時点計算部31の機能は、HALCON(登録商標)のRIT(Reversed-in-time)により実現した。図7(D)の右側に表示された符号TRACKが自転車60の軌跡データを示す。軌跡データTRACKを遡ることにより、自転車60が出現した時点を求めることができる。有効視野計算部27は、交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報と移動対象出現時点計算部31により求められた車外の移動対象が出現した時点とに基づき、実運転中のドライバ14の有効視野を計算することができる。
【0058】
本発明の実施例2における有効視野測定方法等における処理の流れは、以下のようになる(図8参照)。実施例1における有効視野計算ステップ(ステップS70)に先立ち、交差判断ステップで(ステップS50)移動対象領域と注視領域とが交差すると判断された場合、交通状況DB42に記録された過去の交通状況に基づき、移動対象検出ステップ(ステップS10)で検出された車外の移動対象が出現した時点を求める(移動対象出現時点計算ステップ。ステップS60)。有効視野計算ステップ(ステップS70)は、注視領域計算ステップ(ステップS110)で出力された注視領域に関連する視線計測情報と移動対象出現時点計算ステップ(ステップS60)で求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することができる。
【0059】
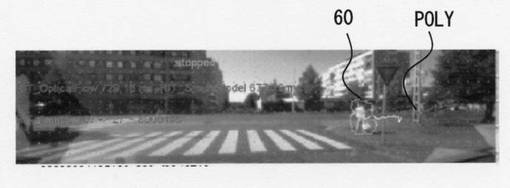
図9は、RITによる解析結果例を示す。図9で、ポリゴンPOLY(原図では赤色で表示)がRITによる歩行者61の追跡結果を示す。ポリゴンPOLYを遡ることにより、歩行者60が出現した時点を求めることができる。
【0060】
以上のように、本発明の実施例2によれば、実施例1における交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、交通状況DB42に記録された過去の交通状況に基づき、移動対象検出部21により検出された車外の移動対象が出現した時点を求める移動対象出現時点計算部31をさらに備えることができる。この結果、移動対象検出部21のオプティカルフローアルゴリズム等による車外の移動対象の検出を検証することができる。
【実施例3】
【0061】
実施例3では、実施例1における交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報部32(警報手段)をさらに備えることができる(図1参照)。例えば、注視領域計算部25により出力された注視領域に関連する視線計測情報により、ドライバ14が中心視Cで自転車60を捉えていないことを検出することが可能である。この場合、警報部32はディスプレイ17への表示または音声出力部(不図示)により生成された音声(例えば、「自転車がいます。」等)により、ドライバ14へ警報を発することができる。自転車60までの距離を測定できる場合、例えば、「自転車にぶつかります。」等により、ドライバ14へ警報を発することができる。以上のように、警報部32は危険度に応じた警報を発することができる。
【0062】
本発明の実施例3における有効視野測定方法等における処理の流れは、以下のようになる(図8参照)。交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断された場合、注視領域計算ステップ(ステップS110)で出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報ステップ(ステップS80)をさらに備えることができる。図8のフローチャートに示されるように、警報ステップ(ステップS80)は有効視野計算ステップ(ステップS70)の後に設けてもよく、あるいは有効視野計算ステップ(ステップS70)に先立って設けてもよい。
【0063】
以上のように、本発明の実施例3によれば、実施例1における交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報部32をさらに備えることができる。この結果、ドライバ14が中心視Cで自転車60を捉えていないことを検出した場合、危険度に応じて警報を発することができる。
【産業上の利用可能性】
【0064】
本発明の活用例として、高齢者の通常走行時における事故防止ツールに適用することができる。わが国の交通事故を法令違反別に見ると、安全不確認が約3割と最も多いと言われている。事故と視覚認知特性との関連では、特に中高年の有効視野と事故率との相関が高いことも報告されている。このため、本発明の有効視野測定システム10等を利用して、交通状況に応じた自身の有効視野の範囲を常時把握することにより、過大評価することなく、安全運転スタイルを心がけるようにすることができる。
【0065】
本発明の他の活用例として、通常走行時におけるヒューマンファクター組込型事故防止ツールに適用することができる。本発明の有効視野測定システム10を従来の走行支援システムに組み込むことにより、判断・操作支援機能においても、精度の向上、ドライバのシステム受容性を高めることが期待できる。
【0066】
本発明の別の活用例として、有効視野を拡大することで運転技術を向上させることに適用することができる。有効視野に与えるマイナス変化要因を特定し、それを低下させることにより運転技術を向上させることができる。即ち、有効視野は年齢だけではなく、心理的な変化(あせり、漫然等)要因によりカバーする範囲が変化する。このため、個人特性または交通状況の変化に応じ自身の有効視野が急激に変化することを事前に把握しておくことにより、安全運転スタイルを心がけることができる。
【符号の説明】
【0067】
10 有効視野測定システム、 11 道路カメラ、 12 ドライバモニタカメラ、 13 フロントガラス、 14 ドライバ、 15 ハンドル、 16 コンピュータ、 17 ディスプレイ、 20 機能ブロック、 21 移動対象検出部、 22 走行確認部、 23 視線計測開始部、 24 移動情報計算部、 25 注視領域計算部、 26 交差判断部、 27 有効視野計算部、 28 通過確認部、 29 繰り返し部、 30 検出終了部、 31 移動対象出現時点計算部、 32 警報部、 40 記録装置、 41 視線計測DB、 42 交通状況DB、 50 自動車、 60 自転車、 61、62 歩行者。
【先行技術文献】
【特許文献】
【0068】
【特許文献1】特開2006−182324号公報
【非特許文献】
【0069】
【非特許文献1】“What is UFOV?”、[online]、VISUAL AWARENESS、[平成22年3月11日検索]、インターネット、<URL: http://www.visualqwareness.com/Pages/whatis.html>
【非特許文献2】太田 博雄著、「運転走行時の有効視野測定装置の開発」、平成10年5月14日発行、日本交通心理学会第57回大会。
【技術分野】
【0001】
本発明は、車両の運転者の有効視野を測定する有効視野測定システム等に関する。
【背景技術】
【0002】
一般に、人の視野とは目を動かさずに見える範囲とされている。図10は、人の視野を説明するためのグラフを示す。図10で、横軸は視野の角度、縦軸は視力である。図10に示されるように、目を向けている点(注視点A)を角度0°とすると、注視点Aから左右13°(視角26°。中心視C)の範囲では視力は約1.2と良好であるが、視野の周辺部の範囲(周辺視P)では視力は約0.1と急に低くなっている。周辺視Pで物体を認知することができる範囲を有効視野と呼ぶ。有効視野は年齢、性別等により異なると言われている。自動車等の運転者のように、動いている状態で車外を見る場合、有効視野が重要となる。この場合、有効視野は年齢、性別等に加えて、走行状況、道路状況、心理状態、個人差により異なると言われている。
【0003】
従来、自動車等の運転者の有効視野を測定する方法として、フロントガラス上に格子状の目盛を設け、運転者にその視線を検知するためのアイカメラ(ヘッドマウントカメラ)を取付けて、運転者が車外の物体を格子に合わせて見る際の目をアイカメラで撮影することにより、視線ベクトルを検出する方法が用いられてきた。この方法では、フロントガラス上の格子を利用して運転者の注視点を測定していた。
【0004】
自動車等の運転者の有効視野を測定する別の方法として、自動車のフロントガラス上に格子状の目盛を設け、ある格子に光点を表示した後に別の格子に光点を表示して、運転者が当該別の光点の表示を認知するまでの時間(認知時間)を測定し、ある光点と別の光点と間の距離および角度を変化させて認知時間との関係を調べる方法もある。この方法でも、フロントガラス上の格子を利用して運転者の注視点を測定していた。
【0005】
有効視野を測定する別の方法として、被験者に対しパーソナルコンピュータ(PC)の画面上に人為的に設定したいくつかの絵を見せて、その反応時間を測定する方法がある(非特許文献1参照)。より具体的には、PCの画面上に1台の自動車の絵を表示してから、画面上の別の位置に別の自動車の絵を表示させ、当該別の自動車の絵が表示されたことを認知するまでの認知時間を測定するという方法である。この方法はオフラインのPCの画面を利用して、被験者の注視点を測定していた。
【0006】
以上の測定方法は、フロントガラス上の格子またはオフラインのPCの画面上の絵を利用して運転者または被験者の注視点を測定するものであり、実際の運転走行時における外部の物体を直接利用した測定方法ではないという問題があった。非特許文献2は実際の運転走行時における有効視野を測定する方法を示している。より詳しくは、フロントガラス面にダッシュボードより約20cmの高さに赤色LED8個を取付けた棒を設置し、自動車教習所等で走行する運転者に、LEDの点灯を感じた時に合図を求めるという方法である。非特許文献2の方法は実際の運転走行時ではあるが実際の道路の運転走行時ではなく、さらに車内のLEDの点灯を利用したものであって実車の外部の物体を直接利用した測定方法ではないという問題があった。
【0007】
特許文献1は実際の運転走行時における有効視野を測定する別の方法を示している。より詳しくは、運転者の顔の角度および車速度による標準視野、対象物と自車との間の相対速度および距離等に基づき、対象物が運転者の標準視野に入っているか否かを判断し、警報を発するというものである。
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、自動車等の運転者の有効視野は年齢、性別等に加えて、走行状況、道路状況、心理状態、個人差により異なると言われている。特許文献1に記載された方法は一般的な標準視野に基づく方法であり、実際に運転している運転者の有効視野を測定する方法ではないという問題があった。そこで、本発明の目的は、上記問題を解決するためになされたものであり、車外の移動物体が存在する実際の道路で実際に運転中の運転者の有効視野をオンラインで求める有効視野測定システム等を提供することにある。
【課題を解決するための手段】
【0009】
この発明の有効視野測定システムは、車両の運転者の有効視野を測定する有効視野測定システムであって、車外の交通状況を測定する第1撮像器と、運転者を測定する第2撮像器と、第1撮像器及び第2撮像器に接続されたコンピュータとを備え、第1撮像器の測定から検出された車外の移動対象と第2撮像器の測定から得られた実運転中の運転者の視線計測情報とに基づき、コンピュータが実運転中の運転者の有効視野をオンラインで計算することを特徴とする。
【0010】
ここで、この発明の有効視野測定システムにおいて、前記コンピュータは、第1撮像器により測定された車外の交通状況を交通状況記録部に記録すると共に該交通状況から所定の動物体解析手法により車外の移動対象を検出する移動対象検出手段と、第1撮像器により測定された車外の交通状況から車両が走行中であることを確認する走行確認手段と、前記走行確認手段により車両が走行中であることが確認され且つ前記移動対象検出手段により車外の移動対象が検出された場合、第2撮像器により測定された運転者の視線計測情報の視線計測記録部への記録を開始させる視線計測記録開始手段と、前記走行確認手段により車両が走行中であることが確認され且つ前記移動対象検出手段により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める移動情報計算手段と、前記視線計測記録開始手段により開始され前記視線計測記録部に記録された運転者の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に該注視領域に関連する視線計測情報を出力する注視領域計算手段と、前記移動情報計算手段により求められた移動対象領域と前記注視領域計算手段により求められた注視領域とが交差するか否か判断する交差判断手段と、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する有効視野計算手段とを備えることができる。
【0011】
ここで、この発明の有効視野測定システムにおいて、第1撮像器により測定された車外の交通状況から前記移動対象検出手段により検出された車外の移動対象が車両の前方を通過したか否かを確認する通過確認手段と、前記交差判断手段により移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認手段により車外の移動対象が車両の前方を通過したと確認されなかった場合、前記移動情報計算手段、前記注視領域計算手段及び前記交差判断手段を繰り返す繰り返し手段とをさらに備えることができる。
【0012】
ここで、この発明の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認手段により車外の移動対象が車両の前方を通過したと確認された場合、車外の移動対象の検出を終了させる検出終了手段をさらに備えることができる。
【0013】
ここで、この発明の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記交通状況記録部に記録された過去の交通状況に基づき、前記移動対象検出手段により検出された車外の移動対象が出現した時点を求める移動対象出現時点計算手段をさらに備え、前記有効視野計算手段は、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報と前記移動対象出現時点計算手段により求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することができる。
【0014】
ここで、この発明の有視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報手段をさらに備えることができる。
【0015】
ここで、この発明の有効視野測定システムにおいて、第1撮像器は車両のフロントガラス後部に設置することができる。
【0016】
ここで、この発明の有効視野測定システムにおいて、第2撮像器は車両のハンドル後部に設置することができる。
【0017】
この発明の有効視野測定方法は、車両の運転者の有効視野を測定する有効視野測定方法であって、車外の交通状況を測定する第1撮像器と、運転者を測定する第2撮像器と、第1撮像器及び第2撮像器に接続されたコンピュータとを用いるものであり、コンピュータが、第1撮像器の測定から検出された車外の移動対象と第2撮像器の測定から得られた実運転中の運転者の視線計測情報とに基づき、実運転中の運転者の有効視野をオンラインで計算することを特徴とする。
【0018】
ここで、この発明の有効視野測定方法において、第1撮像器により測定された車外の交通状況を交通状況記録部に記録すると共に該交通状況から所定の動物体解析手法により車外の移動対象を検出する移動対象検出ステップと、第1撮像器により測定された車外の交通状況から車両が走行中であることを確認する走行確認ステップと、前記走行確認ステップで車両が走行中であることが確認され且つ前記移動対象検出ステップで車外の移動対象が検出された場合、第2撮像器により測定された運転者の視線計測情報の視線計測記録部への記録を開始させる視線計測記録開始ステップと、前記走行確認ステップで車両が走行中であることが確認され且つ前記移動対象検出ステップで車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める移動情報計算ステップと、前記視線計測記録開始ステップで開始され前記視線計測記録部に記録された運転者の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に該注視領域に関連する視線計測情報を出力する注視領域計算ステップと、前記移動情報計算ステップで求められた移動対象領域と前記注視領域計算ステップで求められた注視領域とが交差するか否か判断する交差判断ステップと、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する有効視野計算ステップとを備えることができる。
【0019】
ここで、この発明の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断されなかった場合、第1撮像器により測定された車外の交通状況から前記移動対象検出ステップで検出された車外の移動対象が車両の前方を通過したか否かを確認する通過確認ステップと、前記通過確認ステップで車外の移動対象が車両の前方を通過したと確認されなかった場合、前記移動情報計算ステップ、前記注視領域計算ステップ及び前記交差判断ステップを繰り返す繰り返しステップとをさらに備えることができる。
【0020】
ここで、この発明の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認ステップで車外の移動対象が車両の前方を通過したと確認された場合、車外の移動対象の検出を終了させる検出終了ステップをさらに備えることができる。
【0021】
ここで、この発明の有効視野測定方法において、前記有効視野計算ステップに先立ち、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記交通状況記録部に記録された過去の交通状況に基づき、前記移動対象検出ステップで検出された車外の移動対象が出現した時点を求める移動対象出現時点計算ステップをさらに備え、前記有効視野計算ステップは、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報と前記移動対象出現時点計算ステップで求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することができる。
【0022】
ここで、この発明の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報ステップをさらに備えることができる。
【発明の効果】
【0023】
本発明の有効視野測定システム等によれば、移動体検出部は道路カメラにより測定された車外の交通状況を交通状況データベース(DB)に記録すると共に、当該交通状況から所定の動物体解析手法(例えばオプティカルフローアルゴリズム等)により車外の移動対象を検出する。走行確認部は道路カメラにより測定された車外の交通状況から自動車が走行中であることを確認する。視線計測記録開始部は、走行確認部により自動車が走行中であることが確認され且つ移動対象検出部により車外の移動対象が検出された場合、ドライバモニタカメラにより測定されたドライバの視線計測情報の視線計測DBへの記録を開始させる。移動情報計算部は、走行確認部により自動車が走行中であることが確認され且つ移動対象検出部により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める。注視領域計算部は、視線計測記録開始部により開始され視線計測DBに記録されたドライバの視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に、当該注視領域に関連する視線計測情報を出力する。交差判断部は、移動情報計算部により求められた移動対象領域と注視領域計算部により求められた注視領域とが交差するか否か判断する。有効視野計算部は、交差判断部により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する。
【0024】
以上のようにして、本発明の有効視野測定システムによれば、道路カメラの測定から検出された車外の移動対象とドライバモニタカメラの測定から得られた実運転中の運転者の視線ベクトルを含む視線計測情報とに基づき、コンピュータが実運転中の運転者の有効視野をオンラインで計算するため、車外の移動物体が存在する実際の道路で実際に運転中のドライバの有効視野をオンラインで求めることができるという効果がある。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例1における自動車(車両)のドライバ(運転者)の有効視野を測定する有効視野測定システム10を示す図である。
【図2】ドライバモニタカメラ12の設置状態を示す図である。
【図3】ドライバモニタリングシステムを用いてドライバ14を撮像した様子を示す図である。
【図4】測定座標系における3つのイメージ領域を説明するための概念図である。
【図5】ドライバ14が右側の自転車60を見た状況を示す図である。
【図6】オプティカルフローアルゴリズムによる歩行者および自転車の検出を4枚のフレームで示す図である。
【図7】ドライバ14の有効視野を説明する4枚のフレームを示す図である。
【図8】本発明の実施例1における有効視野測定システム10および有効視野測定方法における処理の流れを示すフローチャートである。
【図9】RITによる解析結果例を示す図である。
【図10】人の視野を説明するためのグラフを示す図である。
【発明を実施するための最良の形態】
【0026】
以下、実施例について図面を参照して詳細に説明する。
【実施例1】
【0027】
図1は、本発明の実施例1における自動車(車両)のドライバ(運転者)の有効視野を測定する有効視野測定システム10を示す。図1において、符号11は車外の交通状況を測定する道路カメラ(第1撮像器)、12はドライバ14を測定するドライバモニタカメラ(第2撮像器)、13はフロントガラス、15はハンドル、EVはドライバの視線ベクトル、16は道路カメラ11およびドライバモニタカメラ12に接続されたコンピュータ、17はコンピュータ16のディスプレイ、20はコンピュータ16の機能を示す機能ブロック、40はコンピュータ16に接続されたハードディスク等の記録装置、41はドライバ14の視線ベクトルEVを含む視線計測情報を記録した視線計測情報データベース(DB)(視線計測情報記録部)、42は道路カメラ11により測定された車外の交通状況を記録した交通状況DB(交通状況記録部)である。図1で自動車の全体図は省略してある。有効視野測定システム10は、道路カメラ11の測定から検出された車外の移動対象とドライバモニタカメラ12の測定から得られた実運転中の運転者14の視線ベクトルEVを含む視線計測情報とに基づき、コンピュータ16が実運転中の運転者14の有効視野をオンラインで計算する。
【0028】
図2は、ドライバモニタカメラ12の設置状態を示す。図2で図1と同じ符号を付した箇所は同じ要素を示すため、説明は省略する。図2に示されるように、ドライバモニタカメラ12は自動車のハンドル15の後部に設置することが好適である。図2ではドライバモニタカメラ12は計器類と同じ位置に設置されているが、設置箇所は当該位置に限定されるものではなく、運転の邪魔にならない箇所、例えばダッシュボードの上に設置してもよい。ドライバモニタカメラ12は、コンピュータ16にUSB等で接続された低コストのいわゆるウェブカエラとし、ドライバモニタリングシステムとしては、例えばTrackEye(登録商標)と呼ばれるソフトウェアを用いることができる。図3は、ドライバモニタリングシステムを用いてドライバ14を撮像した様子を示す。TrackEye(登録商標)は図3に示されるようにドライバ14の顔および目を検知し、ドライバ14の注視点の測定を行う。上述の例ではドライバモニタカメラ12としてTrackEye(登録商標)を例示したが、1秒あたりのフレーム数がより高い、例えばFaceLab sysytemを用いる方が好適である。
【0029】
道路カメラ11は、ドライバ14の周辺視P(図10参照。以下同様)の範囲において左右から出現した道路交通状況における対象物を検出する。道路カメラ11は、自動車のフロントガラス13の後部に設置することが好適である(図1参照)。例えば、バックミラーの左側または右側に取り付ければよい。道路カメラ11は、例えばuEye UI-1225LEM(IDS(登録商標)-imaging社製)を用い、コンピュータ16とはUSBで接続した。ドライバ14の周辺視Pから道路交通状況における対象物を追跡するためには、レンズは広角レンズ(例えば125°)とすることが好適である。撮像した各フレームはタイムスタンプを付けられて交通状況DB42に記録される。
【0030】
次に、発明者らが使用した測定座標系について説明する。図4は、測定座標系における3つのイメージ領域を説明するための概念図である。図4において、符号50は自動車、60は道路交通状況における対象物(図4では自転車を例示)、Cはドライバ14の中心視(原図では赤色で表示)、Prは道路カメラ11で撮像される周辺領域(原図では黄色で表示)である。3つのイメージ領域とは中心視Cと左右2つの周辺領域Prである。図4の上部は道路カメラ11のイメージフレームを示し、下部は上からの全体図を示す。図4に示されるように、中心視Cは角度β(β1からβ2までの範囲)で示され、周辺領域Prは角度パラメータα(進行方向左側では−α2から−α1までの範囲、進行方向右側ではα1からα2までの範囲)で示されている。角度パラメータαは道路カメラ11の進行方向における中心線Xからとられている。上記125°の広角レンズの場合、角度パラメータα2は62.5°となる。角度パラメータα1は周辺領域Prの内側における限界を示し、例えば30°とした。しかし、ドライバ14の中心視Cおよび周辺視Pに合わせて他の値としてもよい。ドライバ14の中心視Cの領域はβ2−β1で示され、ドライバ14の視角β0により変化する。β2−β1は背景技術で説明した視角26°とした。視角β0は上述したドライバモニタカメラ12を用いたドライバモニタリングシステムの出力結果であり、画像の品質等に依存する。なお、図4で中心視Cの原点と周辺領域Prの原点とがずれているのは、道路カメラ11とドライバ14の頭部との間の距離が約1m離れていることを反映させたためである。
【0031】
図5は、ドライバ14が右側の自転車60を見た状況を示す。図5で図4と同じ符号を付した箇所は同じ要素を示すため、説明は省略する。ドライバ14は図4に示されるように最初は前方を注視しているが、周辺視Pで自転車60を認知すると、図5に示されるように中心視Cで自転車60を注視する。ドライバ14が自転車60を注視したということはドライバ14が自転車を認知したものと考えることができる。そこで、自転車60が周辺領域Prに出現してからドライバ14が中心視Cで自転車60を捉えるまでの時間を測定すれば、ドライバ14が自転車60を認知するまでの認知時間を得ることができる。自転車60が周辺領域Prに出現した時間は、道路カメラ11により撮像され交通状況DB42に記録された各フレームに基づき得ることができる。ドライバ14が中心視Cで自転車60を捉えたことは、ドライバモニタリングシステムにより得られた図5に示される視角β0が道路カメラ11の角度パラメータα1からα2の範囲に入ったことにより検出することができる。言い換えれば、道路カメラ11の周辺領域Prとドライバ14の中心視Cとが交差したことを検出することにより、上記認知時間を得ることができる。ドライバ14の有効視野は図5に示される視角β0となる。
【0032】
以下、上述した説明および図4、5を適宜用いて、図1に示される機能ブロック20に示される諸機能について説明する。当該諸機能はソフトウェアにより実現されているが、一部はハードウェアにより実現してもよい。移動対象検出部21(移動対象検出手段)は、道路カメラ11により測定された自動車50の外の交通状況を交通状況DB42に記録すると共に、当該交通状況から所定の動物体解析手法により自動車50の外の移動対象(例えば、図4等における自転車60)を検出する。交通状況DB42への記録は、上述したように道路カメラ11が撮像した各フレームにタイムスタンプを付けて記録される。所定の動物体解析手法としては既存技術であるオプティカルフローアルゴリズムによる解析手法が好適である。発明者らはHalcon(登録商標) machine vision library function(optical_flow_mg())を使用した。詳細は、Halcon(登録商標)reference manual(http://www/mvtec.com/download/documentation/reference-9.0/hdevelop/optical_flow_mg.html)を参照されたい。移動対象の追跡にはddrawアルゴリズムまたはfdrigアルゴリズムが好適である。例えば、ddrawアルゴリズムにより、図5に示される自転車60の右方向からの接近を検知することができる。図6は、オプティカルフローアルゴリズムによる歩行者および自転車の検出を4枚のフレームで示す。図6(A)から(D)はこの順に道路カメラ11で撮像されたフレームである。図6(A)のフレームに示されるように、左側に自転車60が見え、右側に歩行者61および62が見える。周知のように、オプティカルフローアルゴリズムは、連続するフレーム間で移動方向および強さを示すベクトルを計算する。図6(A)の歩行者61に付して示されるように、ベクトルは(原図では赤い)矢印で示されている。各移動対象はフレーム内の中間点まで追跡される。例えば、図6(B)では歩行者61にはベクトルは付されておらず、もはや追跡されていない。原図では最も重要な移動対象は白色で表示され、2番目に重要な移動対象は黄色で表示されている。例えば図6(A)では歩行者61が白色で表示され、歩行者62は黄色で表示されている。図6(C)では歩行者62が白色で表示されている。図6(D)では歩行者62にはベクトルは付されておらず、もはや追跡されていない。一方、自転車60は白色で表示され、ベクトルが付されている。
【0033】
走行確認部22(走行確認手段)は、道路カメラ11により測定された自動車50の外の交通状況から自動車50が走行中であることを確認する。より詳しくは、自動車50が進行方向の急回転等ではない、正常な運転状態であることを確認する。進行方向の急回転等では背景が水平方向に急にシフトするため、オプティカルフローアルゴリズムに悪影響を及ぼすからである。急加速、急減速も車体が上下に動くため、背景も上下に動くことなり、正常な運転状態ではない。長時間の停車も正常な運転状態とはされない。例えば、信号による停止では、ドライバ14の車外の物体に対する注意がそれることが多いため、ドライバモニタカメラ12による監視が意味をもたなくなるからである。但し、横断歩道前の一時停止のような場合は正常な運転状態である。正常な運転状態であることの確認は、Halcon(登録商標)のfdrigアルゴリズムによりオプティカルフローを計測し、背景の動き(背景差分データ)から走行中であることを確認することができる。
【0034】
視線計測記録開始部23(視線計測記録開始手段)は、走行確認部22により自動車50が走行中であることが確認され、且つ移動対象検出部21により車外の移動対象が検出された場合、ドライバモニタカメラ12により測定された運転者14の視線計測情報の視線計測DB41への記録を開始させる。即ち、車外の移動対象の動きとドライバ14の視角とが共に測定される。測定の終了時刻は車外の移動対象の位置と速度とに依存する。視線計測情報には、図4または5に示されたドライバ14の中心視Cに関する情報(視角β0、ドライバ14の顔画像等)が測定時刻と共に記録される。
【0035】
移動情報計算部24(移動情報計算手段)は、走行確認部22により自動車50が走行中であることが確認され、且つ移動対象検出部21により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める。具体的には、図6に示されるようなフレーム内で歩行者61等が存在する画像上の領域を、ベクトルに基づき移動対象領域として求める。
【0036】
注視領域計算部25(注視領域計算手段)は、視線計測記録開始部23により開始され視線計測DB41に記録されたドライバ14の視線計測情報に基づき、実運転中のドライバ14が見ている注視領域(図4または5に示されたドライバ14の中心視Cの領域)を求める。さらに、当該注視領域に関連する視線計測情報を出力する。
【0037】
交差判断部26(交差判断手段)は、移動情報計算部24により求められた移動対象領域と注視領域計算部25により求められた注視領域とが交差するか否かを判断する。上述したように、道路カメラ11の周辺領域Prとドライバ14の中心視Cとが交差したか否かにより判断することができる。
【0038】
有効視野計算部27(段有効視野計算手段)は、交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、実運転中のドライバ14の有効視野(図4または5に示されたドライバ14の視角β0)を計算する。
【0039】
図7は、ドライバ14の有効視野を説明する4枚のフレームを示す。図7(A)から(D)はこの順に道路カメラ11で撮像されたフレームである。図7(A)から(D)に示されるように、自動車50は交差点で一時停止し、画像の右側から自転車60が近づいてきている。ドライバ14の中心視Cは矩形(原図では赤色で表示)で表示されている。図7(A)から(D)の各フレームには、ドライバモニタカメラ12で撮像された対応する5枚のフレーム(ドライバ14の顔画像)が時間順に右側に付されている。この5枚のフレームに対応するドライバ14の5つの中心視Cが道路カメラ11で撮像された各フレーム中に重ねて表示されている。例えば、図7(A)では、ドライバ14の顔画像が次第に右側を向いており、これに対応して中心視Cも次第に右側へ移動している。
【0040】
図7(A)に示されるように、移動対象検出部21が道路カメラ11により測定された自動車50の外の交通状況を交通状況DB42に記録すると共に、当該交通状況からオプティカルフローアルゴリズム等の動物体解析手法により自動車50の外の移動対象(例えば、自転車60)を検出する。走行確認部22は、道路カメラ11により測定された自動車50の外の交通状況から自動車50が走行中であることを確認する。上述したように自動車50は交差点で一時停止した状況であるため、正常な運転状態であると確認される。視線計測記録開始部23は、走行確認部22により自動車50が走行中であることが確認され、且つ移動対象検出部21により車外の移動対象(自転車60)が検出されたため、ドライバモニタカメラ12により測定された運転者14の視線計測情報の視線計測DB41への記録を開始させる。移動情報計算部24は、走行確認部22により自動車50が走行中であることが確認され、且つ移動対象検出部21により車外の移動対象(自転車60)が検出されたため、検出された車外の移動対象(自転車60)が存在する移動対象領域を求める。具体的には、図7(A)等に示されるようなフレーム内で自転車60が存在する画像上の領域を、ベクトルに基づき移動対象領域として求める(原図では緑色で表示)。注視領域計算部25は、視線計測記録開始部23により開始され視線計測DB41に記録されたドライバ14の視線計測情報に基づき、実運転中のドライバ14が見ている注視領域(図7(A)等に表示されたドライバ14の中心視C)を求める。さらに、当該注視領域に関連する視線計測情報を出力する。交差判断部26は、移動情報計算部24により求められた移動対象領域(原図では緑色で表示された領域)と注視領域計算部25により求められた注視領域(原図では赤色で表示された矩形で示される中心視C)とが交差するか否かを判断する。有効視野計算部27は、図7(B)で示されるように交差判断部26により移動対象領域と注視領域とが交差すると判断されたため、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、実運転中のドライバ14の有効視野(図4または5に示されたドライバ14の視角β0)を計算する。
【0041】
通過確認部28(通過確認手段)は、道路カメラ11により測定された車外の交通状況から、移動対象検出部21により検出された車外の移動対象が自動車50の前方を通過したか否かを確認する。繰り返し部29(繰り返し手段)は、交差判断部26により移動対象領域と注視領域とが交差すると判断されず、且つ通過確認部28により車外の移動対象が自動車50の前方を通過したと確認されなかった場合、移動情報計算部24、注視領域計算部25および交差判断部26の各処理を繰り返す。
【0042】
検出終了部30(検出終了手段)は、交差判断部26により移動対象領域と注視領域とが交差すると判断されず、且つ通過確認部28により車外の移動対象が自動車50の前方を通過したと確認された場合、車外の移動対象の検出を終了させる。
【0043】
図8は、本発明の実施例1における有効視野測定システム10および有効視野測定方法における処理の流れをフローチャートで示す。有効視野測定方法は、自動車50のドライバ14の有効視野を測定する有効視野測定方法であって、道路カメラ11と、ドライバモニタカメラ12と、コンピュータ16とを用いるものであり、コンピュータ16が、道路カメラ11の測定から検出された車外の移動対象とドライバモニタカメラ12の測定から得られた実運転中の運転者14の視線ベクトルEVを含む視線計測情報とに基づき、コンピュータ16が実運転中の運転者14の有効視野をオンラインで計算する方法である。図8に示されるように、まず、車両操作データ(ハンドル、アクセル、ブレーキ等)の取得と、道路カメラ11と、ドライバモニタカメラ12との間でキャリブレーションを行って同期をとる(ステップS5)。
【0044】
次に、道路カメラ11により測定された車外の交通状況を交通状況DB42に記録すると共に、当該交通状況から所定の動物体解析手法(例えばオプティカルフローアルゴリズム等)により車外の移動対象を検出する(移動対象検出ステップ。ステップS10)。
【0045】
道路カメラ11により測定された車外の交通状況から自動車50が走行中であることを確認する(走行確認ステップ。ステップS20)。
【0046】
走行確認ステップ(ステップS20)で自動車50が走行中であることが確認され且つ移動対象検出ステップ(ステップS10)で車外の移動対象が検出された場合、ドライバモニタカメラ12により測定されたドライバ14の視線計測情報の視線計測DB41への記録を開始させる(視線計測記録開始ステップ。ステップS30、S100)。
【0047】
走行確認ステップ(ステップS20)で自動車50が走行中であることが確認され且つ移動対象検出ステップ(ステップS10)で車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める(移動情報計算ステップ。ステップS30、S40)。
【0048】
視線計測記録開始ステップ(ステップS100)で開始され視線計測DB41に記録されたドライバ14の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に、当該注視領域に関連する視線計測情報を出力する(注視領域計算ステップ。ステップS110)。
【0049】
移動情報計算ステップ(ステップS40)で求められた移動対象領域と注視領域計算ステップ(ステップS110)で求められた注視領域とが交差するか否か判断する(交差判断ステップ。ステップS50)。
【0050】
交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断された場合、注視領域計算ステップ(ステップS110)で出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する(有効視野計算ステップ。ステップS70)。ステップS60は飛ばし、実施例2で説明する。
【0051】
交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断されなかった場合、道路カメラ11により測定された車外の交通状況から移動対象検出ステップ(ステップS10)で検出された車外の移動対象が自動車50の前方を通過したか否かを確認する(通過確認ステップ。ステップS55)。通過確認ステップ(ステップS55)で車外の移動対象が自動車50の前方を通過したと確認されなかった場合、移動情報計算ステップ(ステップS40)へ戻り、注視領域計算ステップ(ステップS110)および交差判断ステップ(ステップS50)を繰り返す(繰り返しステップ)。
【0052】
交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断されず、且つ通過確認ステップ(ステップS55)で車外の移動対象が自動車50の前方を通過したと確認された場合、車外の移動対象の検出を終了させる(検出終了ステップ。ステップS57)。
【0053】
図8に示されるフローチャートに示されるように、ステップS30で移動対象があると判断されなかった場合、車両操作データ(ハンドル、アクセル、ブレーキ等)の車両操作データDB(不図示)への記録を開始させる(ステップS200)。これはドライバ14が移動対象(不図示)との衝突を回避するために自動車50を減速させたり、進路を変えたりすることにより、移動対象を認知した可能性があるためである。このようなドライバ14の挙動結果である車両データを有効視野の計算に用いることもできる。勿論、ステップS30で移動対象があると判断されなかった場合、移動対象無しとして終了させることも可能である(ステップS35)。交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断されなかった場合、有効視野計算ステップ(ステップS70)へ進む流れもある。これは、ドライバ14が移動対象に気づかなかった場合でも、狭い有効視野として計算することも可能だからである。
【0054】
以上のように、本発明の実施例1によれば、有効視野測定システム10は、道路カメラ11の測定から検出された車外の移動対象とドライバモニタカメラ12の測定から得られた実運転中の運転者14の視線ベクトルEVを含む視線計測情報とに基づき、コンピュータ16が実運転中の運転者14の有効視野をオンラインで計算する。まず、車両操作データ(ハンドル、アクセル、ブレーキ等)の取得と、道路カメラ11と、ドライバモニタカメラ12との間でキャリブレーションを行って同期をとる。次に、移動体検出部21は道路カメラ11により測定された車外の交通状況を交通状況DB42に記録すると共に、当該交通状況から所定の動物体解析手法(例えばオプティカルフローアルゴリズム等)により車外の移動対象を検出する。走行確認部22は道路カメラ11により測定された車外の交通状況から自動車50が走行中であることを確認する。視線計測記録開始部23は、走行確認部22により自動車50が走行中であることが確認され且つ移動対象検出部21により車外の移動対象が検出された場合、ドライバモニタカメラ12により測定されたドライバ14の視線計測情報の視線計測DB41への記録を開始させる。移動情報計算部24は、走行確認部22により自動車50が走行中であることが確認され且つ移動対象検出部21により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める。注視領域計算部25は、視線計測記録開始部23により開始され視線計測DB41に記録されたドライバ14の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に、当該注視領域に関連する視線計測情報を出力する。交差判断部26は、移動情報計算部24により求められた移動対象領域と注視領域計算部25により求められた注視領域とが交差するか否か判断する。有効視野計算部27は、交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する。
【0055】
ドライバ14の有効視野は年齢、性別等に加えて、道路状況、心理状態、個人差により異なると言われている。本発明の実施例1における有効視野測定システム10によれば、道路カメラ11の測定から検出された車外の移動対象とドライバモニタカメラ12の測定から得られた実運転中の運転者14の視線ベクトルEVを含む視線計測情報とに基づき、コンピュータ16が実運転中の運転者14の有効視野をオンラインで計算するため、車外の移動物体が存在する実際の道路で実際に運転中のドライバ14の有効視野をオンラインで求めることができる。
【0056】
上述したように、自転車60が周辺領域Prに出現してからドライバ14が中心視Cで自転車60を捉えるまでの時間を測定すれば、認知時間を得ることができる(図5参照)。この認知時間を有効視野の計算に利用することも可能である。
【実施例2】
【0057】
実施例2では、実施例1における交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、交通状況DB42に記録された過去の交通状況に基づき、移動対象検出部21により検出された車外の移動対象が出現した時点を求める移動対象出現時点計算部31(移動対象出現時点計算手段)をさらに備えることができる(図1参照)。即ち、交通状況DB42に記録された過去の交通状況から移動対象の軌跡データを遡り、移動対象が出現した時点を求めることができる。移動対象出現時点計算部31の機能は、HALCON(登録商標)のRIT(Reversed-in-time)により実現した。図7(D)の右側に表示された符号TRACKが自転車60の軌跡データを示す。軌跡データTRACKを遡ることにより、自転車60が出現した時点を求めることができる。有効視野計算部27は、交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報と移動対象出現時点計算部31により求められた車外の移動対象が出現した時点とに基づき、実運転中のドライバ14の有効視野を計算することができる。
【0058】
本発明の実施例2における有効視野測定方法等における処理の流れは、以下のようになる(図8参照)。実施例1における有効視野計算ステップ(ステップS70)に先立ち、交差判断ステップで(ステップS50)移動対象領域と注視領域とが交差すると判断された場合、交通状況DB42に記録された過去の交通状況に基づき、移動対象検出ステップ(ステップS10)で検出された車外の移動対象が出現した時点を求める(移動対象出現時点計算ステップ。ステップS60)。有効視野計算ステップ(ステップS70)は、注視領域計算ステップ(ステップS110)で出力された注視領域に関連する視線計測情報と移動対象出現時点計算ステップ(ステップS60)で求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することができる。
【0059】
図9は、RITによる解析結果例を示す。図9で、ポリゴンPOLY(原図では赤色で表示)がRITによる歩行者61の追跡結果を示す。ポリゴンPOLYを遡ることにより、歩行者60が出現した時点を求めることができる。
【0060】
以上のように、本発明の実施例2によれば、実施例1における交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、交通状況DB42に記録された過去の交通状況に基づき、移動対象検出部21により検出された車外の移動対象が出現した時点を求める移動対象出現時点計算部31をさらに備えることができる。この結果、移動対象検出部21のオプティカルフローアルゴリズム等による車外の移動対象の検出を検証することができる。
【実施例3】
【0061】
実施例3では、実施例1における交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報部32(警報手段)をさらに備えることができる(図1参照)。例えば、注視領域計算部25により出力された注視領域に関連する視線計測情報により、ドライバ14が中心視Cで自転車60を捉えていないことを検出することが可能である。この場合、警報部32はディスプレイ17への表示または音声出力部(不図示)により生成された音声(例えば、「自転車がいます。」等)により、ドライバ14へ警報を発することができる。自転車60までの距離を測定できる場合、例えば、「自転車にぶつかります。」等により、ドライバ14へ警報を発することができる。以上のように、警報部32は危険度に応じた警報を発することができる。
【0062】
本発明の実施例3における有効視野測定方法等における処理の流れは、以下のようになる(図8参照)。交差判断ステップ(ステップS50)で移動対象領域と注視領域とが交差すると判断された場合、注視領域計算ステップ(ステップS110)で出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報ステップ(ステップS80)をさらに備えることができる。図8のフローチャートに示されるように、警報ステップ(ステップS80)は有効視野計算ステップ(ステップS70)の後に設けてもよく、あるいは有効視野計算ステップ(ステップS70)に先立って設けてもよい。
【0063】
以上のように、本発明の実施例3によれば、実施例1における交差判断部26により移動対象領域と注視領域とが交差すると判断された場合、注視領域計算部25により出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報部32をさらに備えることができる。この結果、ドライバ14が中心視Cで自転車60を捉えていないことを検出した場合、危険度に応じて警報を発することができる。
【産業上の利用可能性】
【0064】
本発明の活用例として、高齢者の通常走行時における事故防止ツールに適用することができる。わが国の交通事故を法令違反別に見ると、安全不確認が約3割と最も多いと言われている。事故と視覚認知特性との関連では、特に中高年の有効視野と事故率との相関が高いことも報告されている。このため、本発明の有効視野測定システム10等を利用して、交通状況に応じた自身の有効視野の範囲を常時把握することにより、過大評価することなく、安全運転スタイルを心がけるようにすることができる。
【0065】
本発明の他の活用例として、通常走行時におけるヒューマンファクター組込型事故防止ツールに適用することができる。本発明の有効視野測定システム10を従来の走行支援システムに組み込むことにより、判断・操作支援機能においても、精度の向上、ドライバのシステム受容性を高めることが期待できる。
【0066】
本発明の別の活用例として、有効視野を拡大することで運転技術を向上させることに適用することができる。有効視野に与えるマイナス変化要因を特定し、それを低下させることにより運転技術を向上させることができる。即ち、有効視野は年齢だけではなく、心理的な変化(あせり、漫然等)要因によりカバーする範囲が変化する。このため、個人特性または交通状況の変化に応じ自身の有効視野が急激に変化することを事前に把握しておくことにより、安全運転スタイルを心がけることができる。
【符号の説明】
【0067】
10 有効視野測定システム、 11 道路カメラ、 12 ドライバモニタカメラ、 13 フロントガラス、 14 ドライバ、 15 ハンドル、 16 コンピュータ、 17 ディスプレイ、 20 機能ブロック、 21 移動対象検出部、 22 走行確認部、 23 視線計測開始部、 24 移動情報計算部、 25 注視領域計算部、 26 交差判断部、 27 有効視野計算部、 28 通過確認部、 29 繰り返し部、 30 検出終了部、 31 移動対象出現時点計算部、 32 警報部、 40 記録装置、 41 視線計測DB、 42 交通状況DB、 50 自動車、 60 自転車、 61、62 歩行者。
【先行技術文献】
【特許文献】
【0068】
【特許文献1】特開2006−182324号公報
【非特許文献】
【0069】
【非特許文献1】“What is UFOV?”、[online]、VISUAL AWARENESS、[平成22年3月11日検索]、インターネット、<URL: http://www.visualqwareness.com/Pages/whatis.html>
【非特許文献2】太田 博雄著、「運転走行時の有効視野測定装置の開発」、平成10年5月14日発行、日本交通心理学会第57回大会。
【特許請求の範囲】
【請求項1】
車両の運転者の有効視野を測定する有効視野測定システムであって、車外の交通状況を測定する第1撮像器と、運転者を測定する第2撮像器と、第1撮像器及び第2撮像器に接続されたコンピュータとを備え、
第1撮像器の測定から検出された車外の移動対象と第2撮像器の測定から得られた実運転中の運転者の視線計測情報とに基づき、コンピュータが実運転中の運転者の有効視野をオンラインで計算することを特徴とする有効視野測定システム。
【請求項2】
請求項1記載の有効視野測定システムにおいて、前記コンピュータは、
第1撮像器により測定された車外の交通状況を交通状況記録部に記録すると共に該交通状況から所定の動物体解析手法により車外の移動対象を検出する移動対象検出手段と、
第1撮像器により測定された車外の交通状況から車両が走行中であることを確認する走行確認手段と、
前記走行確認手段により車両が走行中であることが確認され且つ前記移動対象検出手段により車外の移動対象が検出された場合、第2撮像器により測定された運転者の視線計測情報の視線計測記録部への記録を開始させる視線計測記録開始手段と、
前記走行確認手段により車両が走行中であることが確認され且つ前記移動対象検出手段により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める移動情報計算手段と、
前記視線計測記録開始手段により開始され前記視線計測記録部に記録された運転者の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に該注視領域に関連する視線計測情報を出力する注視領域計算手段と、
前記移動情報計算手段により求められた移動対象領域と前記注視領域計算手段により求められた注視領域とが交差するか否か判断する交差判断手段と、
前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する有効視野計算手段とを備えたことを特徴とする有効視野測定システム。
【請求項3】
請求項2記載の有効視野測定システムにおいて、
第1撮像器により測定された車外の交通状況から前記移動対象検出手段により検出された車外の移動対象が車両の前方を通過したか否かを確認する通過確認手段と、
前記交差判断手段により移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認手段により車外の移動対象が車両の前方を通過したと確認されなかった場合、前記移動情報計算手段、前記注視領域計算手段及び前記交差判断手段を繰り返す繰り返し手段とをさらに備えたことを特徴とする有効視野測定システム。
【請求項4】
請求項3記載の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認手段により車外の移動対象が車両の前方を通過したと確認された場合、車外の移動対象の検出を終了させる検出終了手段をさらに備えたことを特徴とする有効視野測定システム。
【請求項5】
請求項2乃至4のいずれかに記載の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記交通状況記録部に記録された過去の交通状況に基づき、前記移動対象検出手段により検出された車外の移動対象が出現した時点を求める移動対象出現時点計算手段をさらに備え、
前記有効視野計算手段は、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報と前記移動対象出現時点計算手段により求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することを特徴とする有効視野測定システム。
【請求項6】
請求項2乃至5のいずれかに記載の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報手段をさらに備えたことを特徴とする有効視野測定システム。
【請求項7】
請求項1乃至6のいずれかに記載の有効視野測定システムにおいて、第1撮像器は車両のフロントガラス後部に設置されたことを特徴とする有効視野測定システム。
【請求項8】
請求項1乃至7のいずれかに記載の有効視野測定システムにおいて、第2撮像器は車両のハンドル後部に設置されたことを特徴とする有効視野測定システム。
【請求項9】
車両の運転者の有効視野を測定する有効視野測定方法であって、車外の交通状況を測定する第1撮像器と、運転者を測定する第2撮像器と、第1撮像器及び第2撮像器に接続されたコンピュータとを用いるものであり、コンピュータが、
第1撮像器の測定から検出された車外の移動対象と第2撮像器の測定から得られた実運転中の運転者の視線計測情報とに基づき、実運転中の運転者の有効視野をオンラインで計算することを特徴とする有効視野測定方法。
【請求項10】
請求項9記載の有効視野測定方法において、
第1撮像器により測定された車外の交通状況を交通状況記録部に記録すると共に該交通状況から所定の動物体解析手法により車外の移動対象を検出する移動対象検出ステップと、
第1撮像器により測定された車外の交通状況から車両が走行中であることを確認する走行確認ステップと、
前記走行確認ステップで車両が走行中であることが確認され且つ前記移動対象検出ステップで車外の移動対象が検出された場合、第2撮像器により測定された運転者の視線計測情報の視線計測記録部への記録を開始させる視線計測記録開始ステップと、
前記走行確認ステップで車両が走行中であることが確認され且つ前記移動対象検出ステップで車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める移動情報計算ステップと、
前記視線計測記録開始ステップで開始され前記視線計測記録部に記録された運転者の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に該注視領域に関連する視線計測情報を出力する注視領域計算ステップと、
前記移動情報計算ステップで求められた移動対象領域と前記注視領域計算ステップで求められた注視領域とが交差するか否か判断する交差判断ステップと、
前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する有効視野計算ステップとを備えたことを特徴とする有効視野測定方法。
【請求項11】
請求項10記載の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断されなかった場合、
第1撮像器により測定された車外の交通状況から前記移動対象検出ステップで検出された車外の移動対象が車両の前方を通過したか否かを確認する通過確認ステップと、
前記通過確認ステップで車外の移動対象が車両の前方を通過したと確認されなかった場合、前記移動情報計算ステップ、前記注視領域計算ステップ及び前記交差判断ステップを繰り返す繰り返しステップとをさらに備えたことを特徴とする有効視野測定方法。
【請求項12】
請求項11記載の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認ステップで車外の移動対象が車両の前方を通過したと確認された場合、車外の移動対象の検出を終了させる検出終了ステップをさらに備えたことを特徴とする有効視野測定方法。
【請求項13】
請求項10乃至12のいずれかに記載の有効視野測定方法において、前記有効視野計算ステップに先立ち、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記交通状況記録部に記録された過去の交通状況に基づき、前記移動対象検出ステップで検出された車外の移動対象が出現した時点を求める移動対象出現時点計算ステップをさらに備え、
前記有効視野計算ステップは、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報と前記移動対象出現時点計算ステップで求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することを特徴とする有効視野測定方法。
【請求項14】
請求項10乃至13のいずれかに記載の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報ステップをさらに備えたことを特徴とする有効視野測定方法。
【請求項1】
車両の運転者の有効視野を測定する有効視野測定システムであって、車外の交通状況を測定する第1撮像器と、運転者を測定する第2撮像器と、第1撮像器及び第2撮像器に接続されたコンピュータとを備え、
第1撮像器の測定から検出された車外の移動対象と第2撮像器の測定から得られた実運転中の運転者の視線計測情報とに基づき、コンピュータが実運転中の運転者の有効視野をオンラインで計算することを特徴とする有効視野測定システム。
【請求項2】
請求項1記載の有効視野測定システムにおいて、前記コンピュータは、
第1撮像器により測定された車外の交通状況を交通状況記録部に記録すると共に該交通状況から所定の動物体解析手法により車外の移動対象を検出する移動対象検出手段と、
第1撮像器により測定された車外の交通状況から車両が走行中であることを確認する走行確認手段と、
前記走行確認手段により車両が走行中であることが確認され且つ前記移動対象検出手段により車外の移動対象が検出された場合、第2撮像器により測定された運転者の視線計測情報の視線計測記録部への記録を開始させる視線計測記録開始手段と、
前記走行確認手段により車両が走行中であることが確認され且つ前記移動対象検出手段により車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める移動情報計算手段と、
前記視線計測記録開始手段により開始され前記視線計測記録部に記録された運転者の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に該注視領域に関連する視線計測情報を出力する注視領域計算手段と、
前記移動情報計算手段により求められた移動対象領域と前記注視領域計算手段により求められた注視領域とが交差するか否か判断する交差判断手段と、
前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する有効視野計算手段とを備えたことを特徴とする有効視野測定システム。
【請求項3】
請求項2記載の有効視野測定システムにおいて、
第1撮像器により測定された車外の交通状況から前記移動対象検出手段により検出された車外の移動対象が車両の前方を通過したか否かを確認する通過確認手段と、
前記交差判断手段により移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認手段により車外の移動対象が車両の前方を通過したと確認されなかった場合、前記移動情報計算手段、前記注視領域計算手段及び前記交差判断手段を繰り返す繰り返し手段とをさらに備えたことを特徴とする有効視野測定システム。
【請求項4】
請求項3記載の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認手段により車外の移動対象が車両の前方を通過したと確認された場合、車外の移動対象の検出を終了させる検出終了手段をさらに備えたことを特徴とする有効視野測定システム。
【請求項5】
請求項2乃至4のいずれかに記載の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記交通状況記録部に記録された過去の交通状況に基づき、前記移動対象検出手段により検出された車外の移動対象が出現した時点を求める移動対象出現時点計算手段をさらに備え、
前記有効視野計算手段は、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報と前記移動対象出現時点計算手段により求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することを特徴とする有効視野測定システム。
【請求項6】
請求項2乃至5のいずれかに記載の有効視野測定システムにおいて、前記交差判断手段により移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算手段により出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報手段をさらに備えたことを特徴とする有効視野測定システム。
【請求項7】
請求項1乃至6のいずれかに記載の有効視野測定システムにおいて、第1撮像器は車両のフロントガラス後部に設置されたことを特徴とする有効視野測定システム。
【請求項8】
請求項1乃至7のいずれかに記載の有効視野測定システムにおいて、第2撮像器は車両のハンドル後部に設置されたことを特徴とする有効視野測定システム。
【請求項9】
車両の運転者の有効視野を測定する有効視野測定方法であって、車外の交通状況を測定する第1撮像器と、運転者を測定する第2撮像器と、第1撮像器及び第2撮像器に接続されたコンピュータとを用いるものであり、コンピュータが、
第1撮像器の測定から検出された車外の移動対象と第2撮像器の測定から得られた実運転中の運転者の視線計測情報とに基づき、実運転中の運転者の有効視野をオンラインで計算することを特徴とする有効視野測定方法。
【請求項10】
請求項9記載の有効視野測定方法において、
第1撮像器により測定された車外の交通状況を交通状況記録部に記録すると共に該交通状況から所定の動物体解析手法により車外の移動対象を検出する移動対象検出ステップと、
第1撮像器により測定された車外の交通状況から車両が走行中であることを確認する走行確認ステップと、
前記走行確認ステップで車両が走行中であることが確認され且つ前記移動対象検出ステップで車外の移動対象が検出された場合、第2撮像器により測定された運転者の視線計測情報の視線計測記録部への記録を開始させる視線計測記録開始ステップと、
前記走行確認ステップで車両が走行中であることが確認され且つ前記移動対象検出ステップで車外の移動対象が検出された場合、検出された車外の移動対象が存在する移動対象領域を求める移動情報計算ステップと、
前記視線計測記録開始ステップで開始され前記視線計測記録部に記録された運転者の視線計測情報に基づき、実運転中の運転者が見ている注視領域を求めると共に該注視領域に関連する視線計測情報を出力する注視領域計算ステップと、
前記移動情報計算ステップで求められた移動対象領域と前記注視領域計算ステップで求められた注視領域とが交差するか否か判断する交差判断ステップと、
前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報に基づき、実運転中の運転者の有効視野を計算する有効視野計算ステップとを備えたことを特徴とする有効視野測定方法。
【請求項11】
請求項10記載の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断されなかった場合、
第1撮像器により測定された車外の交通状況から前記移動対象検出ステップで検出された車外の移動対象が車両の前方を通過したか否かを確認する通過確認ステップと、
前記通過確認ステップで車外の移動対象が車両の前方を通過したと確認されなかった場合、前記移動情報計算ステップ、前記注視領域計算ステップ及び前記交差判断ステップを繰り返す繰り返しステップとをさらに備えたことを特徴とする有効視野測定方法。
【請求項12】
請求項11記載の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断されず、且つ前記通過確認ステップで車外の移動対象が車両の前方を通過したと確認された場合、車外の移動対象の検出を終了させる検出終了ステップをさらに備えたことを特徴とする有効視野測定方法。
【請求項13】
請求項10乃至12のいずれかに記載の有効視野測定方法において、前記有効視野計算ステップに先立ち、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記交通状況記録部に記録された過去の交通状況に基づき、前記移動対象検出ステップで検出された車外の移動対象が出現した時点を求める移動対象出現時点計算ステップをさらに備え、
前記有効視野計算ステップは、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報と前記移動対象出現時点計算ステップで求められた車外の移動対象が出現した時点とに基づき、実運転中の運転者の有効視野を計算することを特徴とする有効視野測定方法。
【請求項14】
請求項10乃至13のいずれかに記載の有効視野測定方法において、前記交差判断ステップで移動対象領域と注視領域とが交差すると判断された場合、前記注視領域計算ステップで出力された注視領域に関連する視線計測情報に基づき、所定の警報を発する警報ステップをさらに備えたことを特徴とする有効視野測定方法。
【図8】


【図10】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図10】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【公開番号】特開2011−206072(P2011−206072A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−73771(P2010−73771)
【出願日】平成22年3月26日(2010.3.26)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月26日(2010.3.26)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]