
有機ELデバイス製造装置
【課題】アクチュエータを設けることなく、基板を確実に保持できる有機ELデバイス製造装置を提供する。
【解決手段】基板ホルダー91と、基板搬送機から基板6を受取るための基板受けピン66と、基板ホルダー昇降機構68と、基板ホルダー91の端部に設けられ、基板クランプ61とクランプ支持金具62とクランプ付勢バネからなる基板保持機構と、基板6を基板クランプ61から解放するためのクランプ開閉ピン67とを備え、クランプ支持金具62は縦方向に回転し第1の腕62a
と第2の腕62cを有し、第1の腕62aの端には基板クランプ61の一端が固定され、第2の腕62cの端には縦方向に回転する回転部が設けられ、基板クランプ61が基板6を基板ホルダー91に押圧するよう、有機ELデバイス製造装置を構成する。
【解決手段】基板ホルダー91と、基板搬送機から基板6を受取るための基板受けピン66と、基板ホルダー昇降機構68と、基板ホルダー91の端部に設けられ、基板クランプ61とクランプ支持金具62とクランプ付勢バネからなる基板保持機構と、基板6を基板クランプ61から解放するためのクランプ開閉ピン67とを備え、クランプ支持金具62は縦方向に回転し第1の腕62a
と第2の腕62cを有し、第1の腕62aの端には基板クランプ61の一端が固定され、第2の腕62cの端には縦方向に回転する回転部が設けられ、基板クランプ61が基板6を基板ホルダー91に押圧するよう、有機ELデバイス製造装置を構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、有機EL(Electro−Luminescence)デバイス製造装置に係わり、特に成膜時等において好適に基板を保持することのできる有機ELデバイス製造装置に関する。
【背景技術】
【0002】
有機ELデバイスを製造する有力な方法として真空蒸着法がある。真空蒸着法は、真空処理室内において、基板とマスクとを重ねた状態で処理ガスに晒し、蒸着処理を実施するものである。また、近年、処理基板は大型化しており、G6世代の基板サイズは1500mm×1800mmになる。このような大型基板に対応するため、基板面を垂直に保持した状態で処理ガスに晒し、蒸着処理を実施することが行われている。下記の特許文献1には、基板面を垂直に保持した状態で蒸着処理を実施する技術が開示されている。
【0003】
上述したように、真空処理室内において基板面を垂直に保持した状態で蒸着処理を実施する場合、安定した蒸着処理を行うためには、基板を安定して保持することが必要であり、基板を安定して保持するためには、基板を確実に保持することのできる基板保持機構を設けることが必要である。しかし、基板保持のためのアクチュエータ(動作装置)を、真空処理室内に設けた場合は、粉塵等により有機ELデバイスが汚染される恐れがある。したがって、基板保持のためのアクチュエータを真空処理室内に設けることなく基板を確実に保持することが望まれていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−086956号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、基板保持のためのアクチュエータを真空処理室内に設けることなく、基板を確実に保持することのできる有機ELデバイス製造装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、本発明に係る有機ELデバイス製造装置においては、
真空処理室内に設けられ基板を載置するための基板ホルダーと、
前記真空処理室外に設けられた基板搬送機から基板を受取るための、前記真空処理室内に垂直方向に立設して固定された基板受けピンと、
前記基板受けピンに対し前記基板ホルダーを昇降させる基板ホルダー昇降機構と、
前記基板ホルダーの端部に設けられ、基板を前記基板ホルダーに保持するための基板保持機構と、
基板を前記基板保持機構から解放するための、前記真空処理室内に垂直方向に立設して固定されたクランプ開閉ピンとを備え、
前記基板保持機構は、基板を前記基板ホルダーに押圧する板状の基板クランプと、前記基板クランプを支持するクランプ支持金具と、前記基板クランプが基板を前記基板ホルダーに押圧するように付勢するバネとを有し、
前記クランプ支持金具は、水平方向の第1の軸を中心にして回転動作可能であり、前記第1の軸から延伸する第1の腕と第2の腕を有し、前記第1の腕の端には前記基板クランプの一端が固定され、前記第2の腕の端には、水平方向の第2の軸を中心にして回転動作可能な回転部が設けられ、前記第1の軸と前記2つの腕の端を結ぶ直線が3角形を形成する形状であって、
前記真空処理室外に設けられた基板搬送機から前記基板受けピンが基板を受取る状態では、前記第2の腕の回転部が前記クランプ開閉ピンにより押し上げられて、前記第1の腕と第2の腕を結ぶ直線が略水平の状態かつ前記基板クランプが略垂直の状態になり、前記受取った基板を前記基板ホルダーに載置した状態では、前記第1の腕と第2の腕を結ぶ直線が略垂直の状態かつ前記基板クランプが略水平の状態になり、前記基板クランプが基板を前記基板ホルダーに押圧する状態になることを特徴とする。
【発明の効果】
【0007】
本発明によれば、基板保持のためのアクチュエータを真空処理室内に設けることなく、基板を確実に保持することのできる有機ELデバイス製造装置を提供することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態における有機ELデバイス製造装置を示す図である。
【図2】本発明の実施形態における搬送チャンバと処理チャンバの構成の概要を示す図である。
【図3】本発明の実施形態における搬送チャンバと処理チャンバの構成の模式図と動作説明図である。
【図4】本発明の実施形態における動作フローを示す図である。
【図5】本発明の実施形態における基板受取状態での基板保持機構を示す図である。
【図6】本発明の実施形態における基板保持状態での基板保持機構を示す図である。
【図7】本発明の実施形態における基板旋回手段及び基板密着手段を示す図である。
【図8】本発明の実施形態におけるアライメント部の構成を示す図である。
【図9】本発明の実施形態における基板マスク固定手段の実施例を示す図で、図7に前記実施例を加えた図である。
【発明を実施するための形態】
【0009】
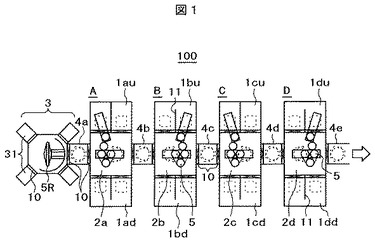
本発明の実施形態を、図1から図9を用いて説明する。有機ELデバイス製造装置は、単に発光材料層(EL層)を形成し電極で挟むだけの構造ではなく、陽極の上に正孔注入層や輸送層、陰極の上に電子注入層や輸送層を形成するなど、様々な材料が薄膜としてなる多層構造を形成したり、基板を洗浄したりする。図1は、その製造装置の一例を示した水平断面図である。
【0010】
本実施形態における有機ELデバイス製造装置100は、大別して処理対象の基板6(以下、単に基板ともいう)を搬入するロードクラスタ3、前記基板6を処理する4つのクラスタ(A〜D)、各クラスタ間又はクラスタとロードクラスタ3あるいは次工程(封止工程)との間に設置された5つの受渡室4(4a〜4e)から構成されている。本実施形態の有機ELデバイス製造装置100では、基板の蒸着面を上面にして搬送し、蒸着するときに基板を立てて蒸着する。
【0011】
ロードクラスタ3は、前後に真空を維持するためにゲート弁10を有するロードロック室31と、前記ロードロック室31から基板6を受取り、旋回して受渡室4aに基板を搬入する搬送ロボット5Rからなる。各ロードロック室31及び各受渡室4は、前後にゲート弁10を有し、当該ゲート弁10の開閉を制御し真空を維持しながら、ロードクラスタ3あるいは次のクラスタ等へ基板を受渡する。
【0012】
各クラスタ(A〜D)は、それぞれ、一台の搬送ロボット5を有する搬送チャンバ2と、搬送ロボット5から基板を受取り、所定の処理をする図面上で上下に配置された2つの処理チャンバ1(第1の添え字a〜dはクラスタを示し、第2の添え字u、dは上側下側を示す)を有する。搬送チャンバ2と処理チャンバ1の間には、ゲート弁10が設けてある。
【0013】
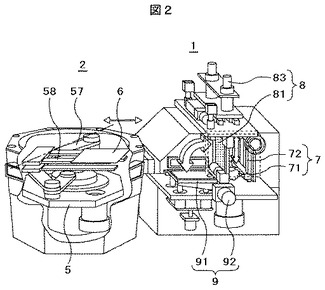
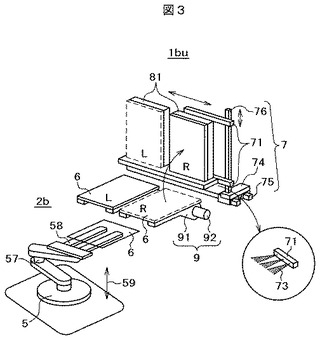
図2は、搬送チャンバ2と処理チャンバ1の構成の概要を示す斜視図である。処理チャンバ1の構成は処理内容によって異なるが、真空で蒸着材料である発光材料を蒸着しEL層を形成する真空蒸着チャンバ1buを例にとって説明する。図3は、搬送チャンバ2bと真空蒸着チャンバ1buの構成の模式図と動作説明図である。図2における搬送ロボット5は、全体を上下に移動可能(図3の矢印59参照)で、左右に旋回可能な3リンク構造のアーム57を有し、その先端には基板搬送用の櫛歯状ハンド58を上下二段に2本有する。
1本ハンドの場合は、基板を次の工程に渡すための回転動作、前の工程から基板を受取るための回転動作、及びこれに付随するゲート弁の開閉動作が搬入出処理の間に必要だが、上下二段にすることによって、片方のハンドに搬入する基板を持たせ、基板を保持していない方のハンドで真空蒸着チャンバから基板の搬出動作をさせた後、連続して搬入動作を行なうことができる。2本ハンドにするか1本ハンドにするかは要求される生産能力によって決める。以後の説明では、説明を簡単にするために1本ハンドで説明する。
【0014】
一方、真空蒸着チャンバ1buは、大別して、発光材料を昇華させ基板6に蒸着させる蒸着部7と、基板6の必要な部分に蒸着させるために基板6とシャドウマスク81の位置合せを行うアライメント部8と、及び搬送ロボット5と基板6の受渡しを行い、蒸着部7へ基板6を移動させる処理受渡部9からなる。
アライメント部8と処理受渡部9は、右側Rラインと左側Lラインの2系統設ける。本実施形態での処理の基本的な考え方は、一方のライン(例えばRライン)で蒸着している間に、他方のLラインでは基板6を搬出入し、基板6とシャドウマスク81とのアライメントをし、蒸着する準備を完了させることである。この処理を交互に行なうことによって、蒸着材料を基板6に蒸着させずに無駄に昇華している時間を減少させることができる。
【0015】
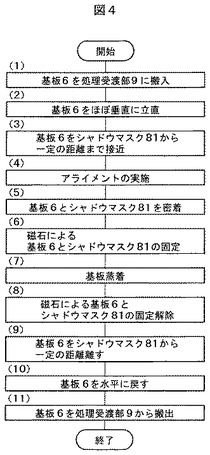
本実施形態では、図4に示すように、まず、(1)基板6を処理受渡部9に搬入し、基板ホルダー91に固定する。この固定方法については後述する。その後、(2)前記基板をほぼ垂直に立て、次に、(3)基板6をシャドウマスク81から一定の距離、例えば0.5mm離れた位置まで接近させ、(4)その状態でアライメントを行なう。アライメント終了後、(5)基板サイズが大きくても、基板6とシャドウマスク81の間の隙間が数十μm以下になるように、基板6とシャドウマスク81を密着させ、(6)磁石により基板6とシャドウマスク81を吸着固定し、(7)蒸着材料を基板6に蒸着する。蒸着終了後は、(8)磁石による基板6とシャドウマスク81の固定を解除し、(9)基板6をシャドウマスク81から一定の距離を離し、(10)基板6を水平にし、(11)基板6を処理受渡部9から搬出する。
【0016】
次に、上記本実施形態のステップである(1)〜(10)ステップを実現する構成及び動作を順に説明する。
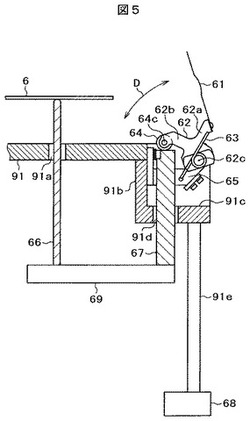
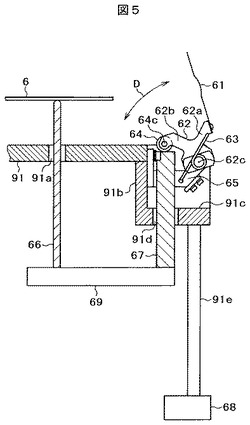
まず、(1)ステップを実現する構成及び動作を、図5と図6を用いて説明する。図5は、本発明の実施形態における基板受取状態での基板保持機構を示す図であり、真空処理室外に設けられた基板搬送機である搬送ロボット5から、基板6を、円柱状の基板受けピン66が受取った状態である。図5において、基板受けピン66は、基板6を支えるよう3本以上設けられ、基板ホルダー91に設けられた貫通穴91aを垂直方向に貫き、真空処理室内の固定ベース69に垂直方向に立設して固定されている。基板ホルダー91の端は、垂直方向に延びる垂直端部91bと接続され、垂直端部91bの下部には、水平方向に延びる水平端部91cが接続されている。垂直端部91bと水平端部91cから、基板ホルダー端部が構成される。水平端部91cには、基板ホルダーサポート91eを介して、基板ホルダー昇降機構68が接続されている。基板ホルダー昇降機構68は、固定された基板受けピン66に対し、基板ホルダー91を昇降させるものである。
【0017】
水平端部91cには、貫通穴91dが設けられている。この貫通穴91dを貫通して、円柱状のクランプ開閉ピン67が、固定ベース69に垂直方向に立設して固定されている。クランプ開閉ピン67は、基板6を後述する基板保持機構から解放するためのものである。垂直端部91bには、固定金具65が取付けられ、固定金具65に、略「く」の字型のクランプ支持金具62が、水平方向の第1の軸62cを中心にして、矢印Dのように回転動作するように設けられている。クランプ支持金具62は、巻きバネ63により、図5において左回転方向に付勢されている。
【0018】
クランプ支持金具62は、第1の軸62cから延伸する第1の腕62aと第2の腕62bを有し、第1の腕62aの端には基板クランプ61の一端が固定され、第2の腕62bの端には、回転部64が設けられている。回転部64は、水平方向の第2の軸64cを中心にして回転動作可能である。回転部64には、巻きバネ63により、略下方向の力が働いており、クランプ開閉ピン67の上部先端で、回転部64を受け止めている。
かくして、第1の軸62cと前記2つの腕62a、62bの端を結ぶ直線が3角形を形成する形状となっている。このように図5においては、第2の腕62bの回転部64がクランプ開閉ピン67の上部先端に押され、第1の腕62aと第2の腕62bを結ぶ直線が略水平の状態になり、基板クランプ61が略垂直の状態になる。したがって、基板6を基板受けピン66で受取ってから、基板ホルダー91上に載置するまでの間、基板クランプ61が妨げとなることがない。
【0019】
基板クランプ61は、弾性を有する金属製の板であり、その一端が、クランプ支持金具62の第1の腕62aの端に固定され、他端が、基板ホルダー91に載置された基板6を押圧する(後述の図6参照)。
【0020】
このように、基板ホルダー91の端部には、基板6を基板ホルダー91に保持するための基板保持機構として、基板6を基板ホルダー91に押圧する板状の基板クランプ61と、基板クランプ61を支持するクランプ支持金具62と、基板クランプ61が基板6を基板ホルダー91に押圧するように付勢するバネ63が設けられている。
【0021】
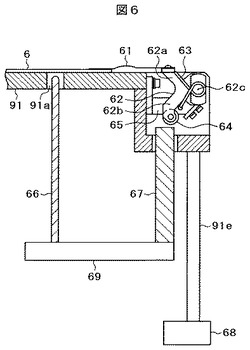
次に、搬送ロボット5から基板6を基板受けピン66で受取った後、基板6が、基板ホルダー91上に載置されるまでの状態について説明する。図6は、本発明の実施形態における基板保持状態での基板保持機構を示す図であり、基板6が、基板ホルダー91上に載置され、板状の基板クランプ61により、基板ホルダー91の上面に押圧されている。
図6においては、基板ホルダー91が、基板ホルダー昇降機構68により上昇され、基板受けピン66の上部先端が、基板ホルダー91の上面よりも低くなっている。これにより、基板6が、基板受けピン66の上部先端から離れ、基板ホルダー91上に載置される。
【0022】
また、基板ホルダー91が上昇したことにより、クランプ開閉ピン67の上部先端が、水平端部91cの上面近くに位置し、クランプ開閉ピン67の上部先端と回転部64が離間している。このとき、回転部64には、巻きバネ63により、略下方向の力が働いている。このように図6においては、巻きバネ63のバネ力により、第1の腕62aと第2の腕62bを結ぶ直線が、略垂直の状態になり、基板クランプ61が略水平の状態になり、基板クランプ61が基板6を基板ホルダー91に押圧する状態になる。
図5から図6の状態に移る際に、回転部64とクランプ開閉ピン67の位置が水平方向にずれるが、回転部64が、クランプ開閉ピン67の上を回転しながら移動するので、粉塵等の発生を抑制することができる。
【0023】
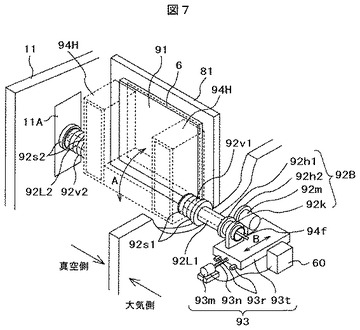
次に、図7を用いて、(2)(10)を実現する基板旋回手段92を説明する。図7は、上記ステップのうち、(2)(10)を実現する基板旋回手段92、及び(3)(5)(9)を実現する基板密着手段93を有する処理受渡部9(図3参照) を示したもので、しかも、配線の被覆材からのアウトガスの問題を解消する真空内配線リンク機構の適用を示した図である。
基板旋回手段92は、処理受渡部9に搬入された基板を載置し保持する基板ホルダー91及び基板6を一体として、アライメント実施前にほぼ垂直に立て、アライメント終了後は水平状態に戻す機能を有する。
【0024】
図7において、基板旋回手段92は、大別して、旋回対象である基板6及び基板ホルダー91などの旋回部を旋回させる真空内配線リンク機構92Lと、前記旋回部を矢印Aの方向に前記機構を介して旋回駆動する旋回駆動部92Bとからなる。
真空内配線リンク機構92Lは、第1リンク92L1と第2リンク92L2、及びそれらを真空側から隔離し、その内部を大気雰囲気にするシール部92Sからなる。前記第1リンク92L1は、一端を回転支持台92kに支持され、他端を大気連通部94Hに、中空部を持つように接続されている。前記第2リンク92L2は、大気連通部94Hに対し前記第1リンク92L1との反対側に設けられ、一端を第1リンク92L1同様、中空部を持つように大気連通部94Hに、他端を図1に示す仕切り部11に設けられた支持部11Aに接続されている。
【0025】
前記シール部92Sは、一端を大気連通部94Hの接続部に、他端を真空蒸着チャンバ1buの側壁に接続された第1シール部92S1と、一端を大気連通部94Hの接続部に、他端を支持部11Aに接続された第2シール部92S2からなる。それぞれのシール部92S1、92S2は、それぞれの両端を繋ぐベローズ92V1、92V2を有しており、また、それぞれのシール部92S1、92S2の大気連通部94H側の接続部は、第1リンク92L1と第2リンク92L2を回転可能に支持している。
上記実施形態では、配線94fをリンク内に敷設するためにリンク内を中空にしたが、シール部92Sはそれぞれのリンクを包含するように構成しているので、リンクと真空シール部の間に配線を敷設してもよい。この場合、リンクは必ずしも中空にする必要はない。
【0026】
一方、旋回駆動部92Bは、大気側に設けられた旋回用モータ92mと、旋回用モータ92mの旋回運動を前記第1リンク92L1に伝達する歯車92h1、92h2と、第1リンクL1の一端を支持する回転支持台92kとを有する。なお、旋回用モータ92mは大気側に設けられた制御装置60で制御される。
【0027】
なお、図7は、真空蒸着チャンバ1buのRラインを示しており、図1に示す仕切り部11を面対象中心として、真空蒸着チャンバ1buのLラインにも同一構造が配置される。従って、Rラインの第1リンク92L1、大気連通部94H、第2リンク92L2、及びLラインの第1リンク92L1、大気連通部94H、第2リンク92L2の各中空部は、仕切り部11に設けられた支持部11Aを介して、大気で繋がっている構造となる。第2リンク92L2は必ずしも中空である必要はないが、後述するように第2リンク92L2は、仕切り部11の中空部で図7に示すB方向に移動する必要があるので、移動部で粉塵が出る可能性があり、支持部11Aの中空部に繋げて、大気に繋がる構造とした。
【0028】
以上、本実施形態による基板旋回手段92を用いると、基板蒸着面を上面にして搬送しているので、基板6を立てればそのまま前述したアライメントができる。
【0029】
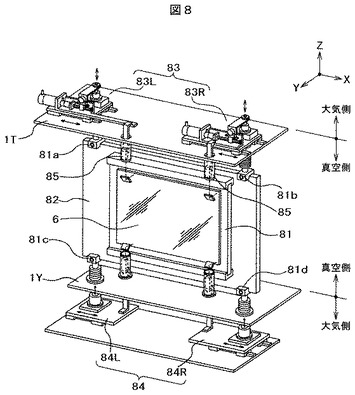
次に、ステップ(4)のアライメントを達成する構成と動作を、図8を用いて説明する。図8に、本実施形態によるアライメント部8を示す。本実施形態では、図8に示すように、基板6とシャドウマスク81を概ね垂直に立てて、アライメントを行なう。アライメント部8は、シャドウマスク81、シャドウマスク81を固定するアライメントベース82、アライメントベース82を保持し、アライメントベース82即ちシャドウマスク81のXZ平面での姿勢を規定するアライメント駆動部83、アライメントベース82を下から支持し、アライメント駆動部83の動きに協調してシャドウマスク81の姿勢を規定するアライメント従動部84、基板6と前記シャドウマスク81に設けられたアライメントマークを検出する4箇所に設けられたアライメント光学系85、アライメントマークの映像を処理し、アライメント量を求めアライメント駆動部83を制御する制御装置60(図7参照)からなる。
【0030】
このような、構成を用いて次のようにアライメントを行なう。アライメントベース82は、その四隅近くであって、上部に2ヶ所81a、81b、その2ヶ所のそれぞれの下に設けられた81c、81dの計4ヶ所の回転支持部により回転可能に支持されている。
前記4箇所に設けられたアライメント光学系85により、基板6とシャドウマスク81の位置ズレ(ΔX、ΔY、θ)を検出する。θは、図8のXZ面における傾きである。この結果に基づいて、アライメントベース82上部に設けた回転支持部81aを図8に示すX方向、Z方向に、同じく上部に設けた回転支持部81bをZ方向に移動させて、前記位置ズレを解消し、アライメントする。このとき、アライメントベース82の上記移動にともない、回転支持部81bはX方向に、アライメントベース82下部に設けた回転支持部81c、81dはX及びZ方向に従動的に移動する。回転支持部81aの駆動は、真空蒸着チャンバ1buの上部壁1T上に設けられた駆動モータを有するアライメント駆動部83L、回転支持部81bの駆動及び受動はアライメント駆動部83R、及び回転支持部81c、81dの従動は真空蒸着チャンバ1buの下部壁1Y下に設けられたアライメント従動部84L、84Rで行なう。
【0031】
アライメントのための機構部は、シール部を介して大気側に設けられており、真空蒸着に悪影響及ぼす粉塵等を真空内に持ち込まないようしており、また、このことによって保守性も向上できる。さらに、アライメント光学系85についても、カメラ及び光源等を、真空側に突き出た内部が大気中である収納筒に収納し、同様な効果を奏している。
【0032】
次に、ステップ(3)(5)(9)の基板6とシャドウマスク81を密着させる基板密着手段93の構成及び動作について、図7を用いて説明する。基板密着手段93は、基板旋回手段92を全体的に、矢印B方行に移動させることによって、基板6を、まず、シャドウマスク81まで一定距離のところまで近づけ、その後密着させ、蒸着後は元の位置まで戻す手段である。そのために、基板密着手段93は、基板旋回手段92を載置する旋回駆動部載置台93tと、旋回駆動部載置台93tの走行用のレール93rと、旋回駆動部載置台93tをボールネジ93nを介して駆動する接近用モータ93mを有する。仕切り部11の中空部にも、旋回駆動部載置台93tの動きに従動して、基板旋回手段92の第2リンク92L2をB方向に移動させるレール(図示せず)がある。レールと言っても、その稼動長さは高々2mm位である。このような機構を制御装置60によって制御することで、基板6をシャドウマスク81に密着させることができる。
【0033】
上記実施形態によれば、基板6とシャドウマスク81が接触しない距離、例えば0.5mm前後を保ちながらアライメントでき、その後、基板6をシャドウマスク81に密着させることで、蒸着におけるボケを低減でき、高精度の蒸着が可能となる。
【0034】
また、図7に示した実施形態においては、大気連通部94H内部は、基板旋回手段92のところで説明したように、第1リンク92L1を介して大気側に開放されている。その結果、押圧に伴うモータ等の粉塵は、大気に排出され、真空蒸着に悪影響を与えることはない。また、モータへの駆動線及びセンサ部からの信号線94fを、大気連通部94Hと第1リンク92L1を介して制御装置60に接続している真空内配線機構を実現しているので、配線の被覆材からのアウトガスによる真空度低下の問題の発生もない。さらに、前記大気連通部94Hや前記リンクを錆に強く十分な強度を持つ金属、例えばステンレス、アルミニウムで構成しているので、アウトガスの発生もない。
従って、上記実施形態によれば、高真空を保持でき、信頼性の高い蒸着処理をすることができる。
【0035】
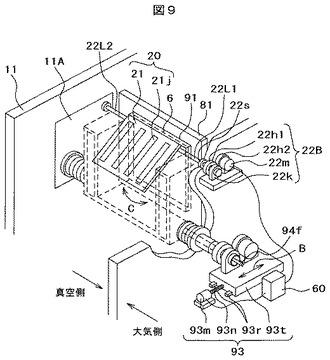
次に、ステップ(6)(8)、即ち蒸着時に基板6とシャドウマスク81とを固定し、安定して蒸着できるようにし、蒸着終了後にその固定を解除する基板マスク固定手段20の本実施形態における実施例を、図9を用いて説明する。図9は、図7に基板マスク固定手段20を付加した図である。図面の複雑さを考慮し、説明に直接関係ない符号を省略している。
本実施形態における基板マスク固定手段20は、基板6とシャドウマスク81を吸着固定する永久磁石21Jを保持する基板マスク吸着体21と、前記基板マスク吸着体21を処理受渡部9の上部から矢印Cのように旋回し、前記基板マスク吸着体21を基板ホルダー91の位置まで移動させる吸着体移動手段である吸着体旋回手段22とからなる。
【0036】
前記基板マスク吸着体21は、旋回して基板ホルダー91に近づくと、非磁性材料の基板6を挟んで、磁性材料で構成されたシャドウマスク81を吸着し始め、近づくにつれて吸着力を強くし、接触すると吸着固定する。このとき、吸着力が強すぎてシャドウマスク81が変形する場合は、接触させずに、適切な吸着力が得られる位置まで旋回させて吸着固定してもよい。その結果、基板6とシャドウマスク81は一体化し、その一体化した状態で蒸着することで安定して確実に蒸着できる。
【0037】
図9において、吸着体旋回手段22は、大別して、旋回対象である基板マスク吸着体21を旋回させるリンク機構22Lと、前記旋回物を矢印Cの方向に前記機構を介して旋回駆動する吸着体旋回駆動部22Bとからなる。
リンク機構22Lは、第1リンク22L1及び第2リンク22L2と、並びにそれらを真空側から隔離するシール部22Sとからなる。リンク機構22Lの基本的な構成は、基板密着手段93の真空内配線リンク機構92Lと同じであるが、次の点が異なる。
【0038】
第1に、本実施形態では、ステップ(6)は、図4に示す基板密着手段93で基板6をシャドウマスクに密着させるステップ(5)の後に行なうので、基板マスク固定手段20を前後に移動させる必要はない。従って、リンクを前後に移動させるためのベローズは不要となり、シール部22Sも真空蒸着チャンバ1buの側壁に第1シール部22s1を、支持部11Aに第2シール部22s2を、リンク機構22が回転可能に設ければよい。逆に言えば、前記動作フロー(5)の前に行なうのであれば、真空内配線リンク機構92Lと同一構造とし、基板旋回手段92と同様に吸着体旋回手段22全体を前後に移動させることが必要である。
【0039】
第2に、真空内配線リンク機構92Lのリンクは配線をするために中空であったが、リンク機構22Lでは配線がないので必ずしも中空である必要はない。
また、第2リンク22L2の支持部11A内の回転支持体(図示せず)において、仮に粉塵が発生しても、真空内配線リンク機構92Lの第2リンクの支持体と同一空間を有しているので、前記真空内配線リンク機構92Lを介して前記粉塵を大気側に排気することが可能である。
【0040】
一方、吸着体旋回駆動部22Bは、前述した旋回駆動部92Bとパワー的な規模は異なるものの、基本的には旋回駆動部92Bと同一の構造を有している。従って、基板旋回手段92における符号番号を92から22に置換えることができるので、ここでは説明を省略する。なお、基板マスク吸着体21の待機位置は、基板旋回手段92の旋回が支障とならないよう、基板旋回手段92の旋回領域の上部に設けるとよい。
【0041】
基板マスク固定手段20の本実施形態によれば、基板マスク吸着体21を処理受渡部9と分離した、あるいは別体の独立した構造とすることができるので、基板マスク吸着体21あるいは処理受渡部9の構成機構を、故障等により交換する必要が生じても、基板マスク吸着体21については、処理受渡部9に関係なく、基板マスク吸着体21のみを交換すればよく、処理受渡部9については、基板マスク吸着体21に関係なく、処理受渡部9のみを交換すればよい。さらに、特に処理受渡部9について言えば、その構造が簡素化し保守し易くなる。従って、保守性の高い基板マスク吸着体あるいは処理受渡部を提供できる。
【0042】
最後に、ステップ(7)の蒸着処理について、本実施形態における実施例を、図3を用いて説明する。蒸着部7は、図3に示すように、蒸着源71をレール76上に沿って上下方向に移動させる上下駆動手段72、蒸着源71をレール75上に沿って左右のアライメント部間移動する左右駆動ベース74を有する。蒸着源71は、内部に蒸着材料である発光材料を有し、前記蒸着材料を加熱制御(図示せず)することによって安定した蒸発速度が得られ、図3の引出し図に示すように、ライン状に並んだ複数の噴射ノズルから噴射73される構造となっている。必要により、安定した蒸着が得られるように添加剤も同時に加熱して蒸着する。
【0043】
なお、上記説明では有機ELデバイスを例に説明したが、有機ELデバイスと同じ背景にある蒸着処理をする成膜装置にも適用できる。
【符号の説明】
【0044】
1:処理チャンバ、1bu:真空蒸着チャンバ、2:搬送チャンバ、3:ロードクラスタ、6:基板、7:蒸着部、8:アライメント部、9:処理受渡部、11:仕切り部、20:基板マスク固定手段、21:永久磁石を保持する基板マスク吸着体、21J:永久磁石、22:吸着体旋回手段、22B:吸着体旋回駆動部、23:電磁石を保持する基板マスク吸着体、23d:電磁石、23H:23の収納ケース、60:制御装置、61:基板クランプ、62:クランプ支持金具、62a:第1の腕、62b:第2の腕、62c:第1の軸、63:巻きバネ、64:回転部、64c:第2の軸、65:固定金具、66:基板受けピン、67:クランプ開閉ピン、68:基板ホルダー昇降機構、69:固定ベース、71:蒸発源、81:シャドウマスク、81a〜d:回転支持部、82:アライメントベース、83:アライメント駆動部、83Z:Z軸駆動部、83X:X軸駆動部、84:アライメント従動部、85:アライメント光学系、91:基板ホルダー、91a:貫通穴、91b:垂直端部、91c:水平端部、91d:貫通穴、91e:基板ホルダーサポート、92:基板旋回手段、93:基板密着手段、94H:大気連通部、100:有機ELデバイスの製造装置、A〜D:クラスタ。
【技術分野】
【0001】
本発明は、有機EL(Electro−Luminescence)デバイス製造装置に係わり、特に成膜時等において好適に基板を保持することのできる有機ELデバイス製造装置に関する。
【背景技術】
【0002】
有機ELデバイスを製造する有力な方法として真空蒸着法がある。真空蒸着法は、真空処理室内において、基板とマスクとを重ねた状態で処理ガスに晒し、蒸着処理を実施するものである。また、近年、処理基板は大型化しており、G6世代の基板サイズは1500mm×1800mmになる。このような大型基板に対応するため、基板面を垂直に保持した状態で処理ガスに晒し、蒸着処理を実施することが行われている。下記の特許文献1には、基板面を垂直に保持した状態で蒸着処理を実施する技術が開示されている。
【0003】
上述したように、真空処理室内において基板面を垂直に保持した状態で蒸着処理を実施する場合、安定した蒸着処理を行うためには、基板を安定して保持することが必要であり、基板を安定して保持するためには、基板を確実に保持することのできる基板保持機構を設けることが必要である。しかし、基板保持のためのアクチュエータ(動作装置)を、真空処理室内に設けた場合は、粉塵等により有機ELデバイスが汚染される恐れがある。したがって、基板保持のためのアクチュエータを真空処理室内に設けることなく基板を確実に保持することが望まれていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−086956号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、基板保持のためのアクチュエータを真空処理室内に設けることなく、基板を確実に保持することのできる有機ELデバイス製造装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、本発明に係る有機ELデバイス製造装置においては、
真空処理室内に設けられ基板を載置するための基板ホルダーと、
前記真空処理室外に設けられた基板搬送機から基板を受取るための、前記真空処理室内に垂直方向に立設して固定された基板受けピンと、
前記基板受けピンに対し前記基板ホルダーを昇降させる基板ホルダー昇降機構と、
前記基板ホルダーの端部に設けられ、基板を前記基板ホルダーに保持するための基板保持機構と、
基板を前記基板保持機構から解放するための、前記真空処理室内に垂直方向に立設して固定されたクランプ開閉ピンとを備え、
前記基板保持機構は、基板を前記基板ホルダーに押圧する板状の基板クランプと、前記基板クランプを支持するクランプ支持金具と、前記基板クランプが基板を前記基板ホルダーに押圧するように付勢するバネとを有し、
前記クランプ支持金具は、水平方向の第1の軸を中心にして回転動作可能であり、前記第1の軸から延伸する第1の腕と第2の腕を有し、前記第1の腕の端には前記基板クランプの一端が固定され、前記第2の腕の端には、水平方向の第2の軸を中心にして回転動作可能な回転部が設けられ、前記第1の軸と前記2つの腕の端を結ぶ直線が3角形を形成する形状であって、
前記真空処理室外に設けられた基板搬送機から前記基板受けピンが基板を受取る状態では、前記第2の腕の回転部が前記クランプ開閉ピンにより押し上げられて、前記第1の腕と第2の腕を結ぶ直線が略水平の状態かつ前記基板クランプが略垂直の状態になり、前記受取った基板を前記基板ホルダーに載置した状態では、前記第1の腕と第2の腕を結ぶ直線が略垂直の状態かつ前記基板クランプが略水平の状態になり、前記基板クランプが基板を前記基板ホルダーに押圧する状態になることを特徴とする。
【発明の効果】
【0007】
本発明によれば、基板保持のためのアクチュエータを真空処理室内に設けることなく、基板を確実に保持することのできる有機ELデバイス製造装置を提供することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態における有機ELデバイス製造装置を示す図である。
【図2】本発明の実施形態における搬送チャンバと処理チャンバの構成の概要を示す図である。
【図3】本発明の実施形態における搬送チャンバと処理チャンバの構成の模式図と動作説明図である。
【図4】本発明の実施形態における動作フローを示す図である。
【図5】本発明の実施形態における基板受取状態での基板保持機構を示す図である。
【図6】本発明の実施形態における基板保持状態での基板保持機構を示す図である。
【図7】本発明の実施形態における基板旋回手段及び基板密着手段を示す図である。
【図8】本発明の実施形態におけるアライメント部の構成を示す図である。
【図9】本発明の実施形態における基板マスク固定手段の実施例を示す図で、図7に前記実施例を加えた図である。
【発明を実施するための形態】
【0009】
本発明の実施形態を、図1から図9を用いて説明する。有機ELデバイス製造装置は、単に発光材料層(EL層)を形成し電極で挟むだけの構造ではなく、陽極の上に正孔注入層や輸送層、陰極の上に電子注入層や輸送層を形成するなど、様々な材料が薄膜としてなる多層構造を形成したり、基板を洗浄したりする。図1は、その製造装置の一例を示した水平断面図である。
【0010】
本実施形態における有機ELデバイス製造装置100は、大別して処理対象の基板6(以下、単に基板ともいう)を搬入するロードクラスタ3、前記基板6を処理する4つのクラスタ(A〜D)、各クラスタ間又はクラスタとロードクラスタ3あるいは次工程(封止工程)との間に設置された5つの受渡室4(4a〜4e)から構成されている。本実施形態の有機ELデバイス製造装置100では、基板の蒸着面を上面にして搬送し、蒸着するときに基板を立てて蒸着する。
【0011】
ロードクラスタ3は、前後に真空を維持するためにゲート弁10を有するロードロック室31と、前記ロードロック室31から基板6を受取り、旋回して受渡室4aに基板を搬入する搬送ロボット5Rからなる。各ロードロック室31及び各受渡室4は、前後にゲート弁10を有し、当該ゲート弁10の開閉を制御し真空を維持しながら、ロードクラスタ3あるいは次のクラスタ等へ基板を受渡する。
【0012】
各クラスタ(A〜D)は、それぞれ、一台の搬送ロボット5を有する搬送チャンバ2と、搬送ロボット5から基板を受取り、所定の処理をする図面上で上下に配置された2つの処理チャンバ1(第1の添え字a〜dはクラスタを示し、第2の添え字u、dは上側下側を示す)を有する。搬送チャンバ2と処理チャンバ1の間には、ゲート弁10が設けてある。
【0013】
図2は、搬送チャンバ2と処理チャンバ1の構成の概要を示す斜視図である。処理チャンバ1の構成は処理内容によって異なるが、真空で蒸着材料である発光材料を蒸着しEL層を形成する真空蒸着チャンバ1buを例にとって説明する。図3は、搬送チャンバ2bと真空蒸着チャンバ1buの構成の模式図と動作説明図である。図2における搬送ロボット5は、全体を上下に移動可能(図3の矢印59参照)で、左右に旋回可能な3リンク構造のアーム57を有し、その先端には基板搬送用の櫛歯状ハンド58を上下二段に2本有する。
1本ハンドの場合は、基板を次の工程に渡すための回転動作、前の工程から基板を受取るための回転動作、及びこれに付随するゲート弁の開閉動作が搬入出処理の間に必要だが、上下二段にすることによって、片方のハンドに搬入する基板を持たせ、基板を保持していない方のハンドで真空蒸着チャンバから基板の搬出動作をさせた後、連続して搬入動作を行なうことができる。2本ハンドにするか1本ハンドにするかは要求される生産能力によって決める。以後の説明では、説明を簡単にするために1本ハンドで説明する。
【0014】
一方、真空蒸着チャンバ1buは、大別して、発光材料を昇華させ基板6に蒸着させる蒸着部7と、基板6の必要な部分に蒸着させるために基板6とシャドウマスク81の位置合せを行うアライメント部8と、及び搬送ロボット5と基板6の受渡しを行い、蒸着部7へ基板6を移動させる処理受渡部9からなる。
アライメント部8と処理受渡部9は、右側Rラインと左側Lラインの2系統設ける。本実施形態での処理の基本的な考え方は、一方のライン(例えばRライン)で蒸着している間に、他方のLラインでは基板6を搬出入し、基板6とシャドウマスク81とのアライメントをし、蒸着する準備を完了させることである。この処理を交互に行なうことによって、蒸着材料を基板6に蒸着させずに無駄に昇華している時間を減少させることができる。
【0015】
本実施形態では、図4に示すように、まず、(1)基板6を処理受渡部9に搬入し、基板ホルダー91に固定する。この固定方法については後述する。その後、(2)前記基板をほぼ垂直に立て、次に、(3)基板6をシャドウマスク81から一定の距離、例えば0.5mm離れた位置まで接近させ、(4)その状態でアライメントを行なう。アライメント終了後、(5)基板サイズが大きくても、基板6とシャドウマスク81の間の隙間が数十μm以下になるように、基板6とシャドウマスク81を密着させ、(6)磁石により基板6とシャドウマスク81を吸着固定し、(7)蒸着材料を基板6に蒸着する。蒸着終了後は、(8)磁石による基板6とシャドウマスク81の固定を解除し、(9)基板6をシャドウマスク81から一定の距離を離し、(10)基板6を水平にし、(11)基板6を処理受渡部9から搬出する。
【0016】
次に、上記本実施形態のステップである(1)〜(10)ステップを実現する構成及び動作を順に説明する。
まず、(1)ステップを実現する構成及び動作を、図5と図6を用いて説明する。図5は、本発明の実施形態における基板受取状態での基板保持機構を示す図であり、真空処理室外に設けられた基板搬送機である搬送ロボット5から、基板6を、円柱状の基板受けピン66が受取った状態である。図5において、基板受けピン66は、基板6を支えるよう3本以上設けられ、基板ホルダー91に設けられた貫通穴91aを垂直方向に貫き、真空処理室内の固定ベース69に垂直方向に立設して固定されている。基板ホルダー91の端は、垂直方向に延びる垂直端部91bと接続され、垂直端部91bの下部には、水平方向に延びる水平端部91cが接続されている。垂直端部91bと水平端部91cから、基板ホルダー端部が構成される。水平端部91cには、基板ホルダーサポート91eを介して、基板ホルダー昇降機構68が接続されている。基板ホルダー昇降機構68は、固定された基板受けピン66に対し、基板ホルダー91を昇降させるものである。
【0017】
水平端部91cには、貫通穴91dが設けられている。この貫通穴91dを貫通して、円柱状のクランプ開閉ピン67が、固定ベース69に垂直方向に立設して固定されている。クランプ開閉ピン67は、基板6を後述する基板保持機構から解放するためのものである。垂直端部91bには、固定金具65が取付けられ、固定金具65に、略「く」の字型のクランプ支持金具62が、水平方向の第1の軸62cを中心にして、矢印Dのように回転動作するように設けられている。クランプ支持金具62は、巻きバネ63により、図5において左回転方向に付勢されている。
【0018】
クランプ支持金具62は、第1の軸62cから延伸する第1の腕62aと第2の腕62bを有し、第1の腕62aの端には基板クランプ61の一端が固定され、第2の腕62bの端には、回転部64が設けられている。回転部64は、水平方向の第2の軸64cを中心にして回転動作可能である。回転部64には、巻きバネ63により、略下方向の力が働いており、クランプ開閉ピン67の上部先端で、回転部64を受け止めている。
かくして、第1の軸62cと前記2つの腕62a、62bの端を結ぶ直線が3角形を形成する形状となっている。このように図5においては、第2の腕62bの回転部64がクランプ開閉ピン67の上部先端に押され、第1の腕62aと第2の腕62bを結ぶ直線が略水平の状態になり、基板クランプ61が略垂直の状態になる。したがって、基板6を基板受けピン66で受取ってから、基板ホルダー91上に載置するまでの間、基板クランプ61が妨げとなることがない。
【0019】
基板クランプ61は、弾性を有する金属製の板であり、その一端が、クランプ支持金具62の第1の腕62aの端に固定され、他端が、基板ホルダー91に載置された基板6を押圧する(後述の図6参照)。
【0020】
このように、基板ホルダー91の端部には、基板6を基板ホルダー91に保持するための基板保持機構として、基板6を基板ホルダー91に押圧する板状の基板クランプ61と、基板クランプ61を支持するクランプ支持金具62と、基板クランプ61が基板6を基板ホルダー91に押圧するように付勢するバネ63が設けられている。
【0021】
次に、搬送ロボット5から基板6を基板受けピン66で受取った後、基板6が、基板ホルダー91上に載置されるまでの状態について説明する。図6は、本発明の実施形態における基板保持状態での基板保持機構を示す図であり、基板6が、基板ホルダー91上に載置され、板状の基板クランプ61により、基板ホルダー91の上面に押圧されている。
図6においては、基板ホルダー91が、基板ホルダー昇降機構68により上昇され、基板受けピン66の上部先端が、基板ホルダー91の上面よりも低くなっている。これにより、基板6が、基板受けピン66の上部先端から離れ、基板ホルダー91上に載置される。
【0022】
また、基板ホルダー91が上昇したことにより、クランプ開閉ピン67の上部先端が、水平端部91cの上面近くに位置し、クランプ開閉ピン67の上部先端と回転部64が離間している。このとき、回転部64には、巻きバネ63により、略下方向の力が働いている。このように図6においては、巻きバネ63のバネ力により、第1の腕62aと第2の腕62bを結ぶ直線が、略垂直の状態になり、基板クランプ61が略水平の状態になり、基板クランプ61が基板6を基板ホルダー91に押圧する状態になる。
図5から図6の状態に移る際に、回転部64とクランプ開閉ピン67の位置が水平方向にずれるが、回転部64が、クランプ開閉ピン67の上を回転しながら移動するので、粉塵等の発生を抑制することができる。
【0023】
次に、図7を用いて、(2)(10)を実現する基板旋回手段92を説明する。図7は、上記ステップのうち、(2)(10)を実現する基板旋回手段92、及び(3)(5)(9)を実現する基板密着手段93を有する処理受渡部9(図3参照) を示したもので、しかも、配線の被覆材からのアウトガスの問題を解消する真空内配線リンク機構の適用を示した図である。
基板旋回手段92は、処理受渡部9に搬入された基板を載置し保持する基板ホルダー91及び基板6を一体として、アライメント実施前にほぼ垂直に立て、アライメント終了後は水平状態に戻す機能を有する。
【0024】
図7において、基板旋回手段92は、大別して、旋回対象である基板6及び基板ホルダー91などの旋回部を旋回させる真空内配線リンク機構92Lと、前記旋回部を矢印Aの方向に前記機構を介して旋回駆動する旋回駆動部92Bとからなる。
真空内配線リンク機構92Lは、第1リンク92L1と第2リンク92L2、及びそれらを真空側から隔離し、その内部を大気雰囲気にするシール部92Sからなる。前記第1リンク92L1は、一端を回転支持台92kに支持され、他端を大気連通部94Hに、中空部を持つように接続されている。前記第2リンク92L2は、大気連通部94Hに対し前記第1リンク92L1との反対側に設けられ、一端を第1リンク92L1同様、中空部を持つように大気連通部94Hに、他端を図1に示す仕切り部11に設けられた支持部11Aに接続されている。
【0025】
前記シール部92Sは、一端を大気連通部94Hの接続部に、他端を真空蒸着チャンバ1buの側壁に接続された第1シール部92S1と、一端を大気連通部94Hの接続部に、他端を支持部11Aに接続された第2シール部92S2からなる。それぞれのシール部92S1、92S2は、それぞれの両端を繋ぐベローズ92V1、92V2を有しており、また、それぞれのシール部92S1、92S2の大気連通部94H側の接続部は、第1リンク92L1と第2リンク92L2を回転可能に支持している。
上記実施形態では、配線94fをリンク内に敷設するためにリンク内を中空にしたが、シール部92Sはそれぞれのリンクを包含するように構成しているので、リンクと真空シール部の間に配線を敷設してもよい。この場合、リンクは必ずしも中空にする必要はない。
【0026】
一方、旋回駆動部92Bは、大気側に設けられた旋回用モータ92mと、旋回用モータ92mの旋回運動を前記第1リンク92L1に伝達する歯車92h1、92h2と、第1リンクL1の一端を支持する回転支持台92kとを有する。なお、旋回用モータ92mは大気側に設けられた制御装置60で制御される。
【0027】
なお、図7は、真空蒸着チャンバ1buのRラインを示しており、図1に示す仕切り部11を面対象中心として、真空蒸着チャンバ1buのLラインにも同一構造が配置される。従って、Rラインの第1リンク92L1、大気連通部94H、第2リンク92L2、及びLラインの第1リンク92L1、大気連通部94H、第2リンク92L2の各中空部は、仕切り部11に設けられた支持部11Aを介して、大気で繋がっている構造となる。第2リンク92L2は必ずしも中空である必要はないが、後述するように第2リンク92L2は、仕切り部11の中空部で図7に示すB方向に移動する必要があるので、移動部で粉塵が出る可能性があり、支持部11Aの中空部に繋げて、大気に繋がる構造とした。
【0028】
以上、本実施形態による基板旋回手段92を用いると、基板蒸着面を上面にして搬送しているので、基板6を立てればそのまま前述したアライメントができる。
【0029】
次に、ステップ(4)のアライメントを達成する構成と動作を、図8を用いて説明する。図8に、本実施形態によるアライメント部8を示す。本実施形態では、図8に示すように、基板6とシャドウマスク81を概ね垂直に立てて、アライメントを行なう。アライメント部8は、シャドウマスク81、シャドウマスク81を固定するアライメントベース82、アライメントベース82を保持し、アライメントベース82即ちシャドウマスク81のXZ平面での姿勢を規定するアライメント駆動部83、アライメントベース82を下から支持し、アライメント駆動部83の動きに協調してシャドウマスク81の姿勢を規定するアライメント従動部84、基板6と前記シャドウマスク81に設けられたアライメントマークを検出する4箇所に設けられたアライメント光学系85、アライメントマークの映像を処理し、アライメント量を求めアライメント駆動部83を制御する制御装置60(図7参照)からなる。
【0030】
このような、構成を用いて次のようにアライメントを行なう。アライメントベース82は、その四隅近くであって、上部に2ヶ所81a、81b、その2ヶ所のそれぞれの下に設けられた81c、81dの計4ヶ所の回転支持部により回転可能に支持されている。
前記4箇所に設けられたアライメント光学系85により、基板6とシャドウマスク81の位置ズレ(ΔX、ΔY、θ)を検出する。θは、図8のXZ面における傾きである。この結果に基づいて、アライメントベース82上部に設けた回転支持部81aを図8に示すX方向、Z方向に、同じく上部に設けた回転支持部81bをZ方向に移動させて、前記位置ズレを解消し、アライメントする。このとき、アライメントベース82の上記移動にともない、回転支持部81bはX方向に、アライメントベース82下部に設けた回転支持部81c、81dはX及びZ方向に従動的に移動する。回転支持部81aの駆動は、真空蒸着チャンバ1buの上部壁1T上に設けられた駆動モータを有するアライメント駆動部83L、回転支持部81bの駆動及び受動はアライメント駆動部83R、及び回転支持部81c、81dの従動は真空蒸着チャンバ1buの下部壁1Y下に設けられたアライメント従動部84L、84Rで行なう。
【0031】
アライメントのための機構部は、シール部を介して大気側に設けられており、真空蒸着に悪影響及ぼす粉塵等を真空内に持ち込まないようしており、また、このことによって保守性も向上できる。さらに、アライメント光学系85についても、カメラ及び光源等を、真空側に突き出た内部が大気中である収納筒に収納し、同様な効果を奏している。
【0032】
次に、ステップ(3)(5)(9)の基板6とシャドウマスク81を密着させる基板密着手段93の構成及び動作について、図7を用いて説明する。基板密着手段93は、基板旋回手段92を全体的に、矢印B方行に移動させることによって、基板6を、まず、シャドウマスク81まで一定距離のところまで近づけ、その後密着させ、蒸着後は元の位置まで戻す手段である。そのために、基板密着手段93は、基板旋回手段92を載置する旋回駆動部載置台93tと、旋回駆動部載置台93tの走行用のレール93rと、旋回駆動部載置台93tをボールネジ93nを介して駆動する接近用モータ93mを有する。仕切り部11の中空部にも、旋回駆動部載置台93tの動きに従動して、基板旋回手段92の第2リンク92L2をB方向に移動させるレール(図示せず)がある。レールと言っても、その稼動長さは高々2mm位である。このような機構を制御装置60によって制御することで、基板6をシャドウマスク81に密着させることができる。
【0033】
上記実施形態によれば、基板6とシャドウマスク81が接触しない距離、例えば0.5mm前後を保ちながらアライメントでき、その後、基板6をシャドウマスク81に密着させることで、蒸着におけるボケを低減でき、高精度の蒸着が可能となる。
【0034】
また、図7に示した実施形態においては、大気連通部94H内部は、基板旋回手段92のところで説明したように、第1リンク92L1を介して大気側に開放されている。その結果、押圧に伴うモータ等の粉塵は、大気に排出され、真空蒸着に悪影響を与えることはない。また、モータへの駆動線及びセンサ部からの信号線94fを、大気連通部94Hと第1リンク92L1を介して制御装置60に接続している真空内配線機構を実現しているので、配線の被覆材からのアウトガスによる真空度低下の問題の発生もない。さらに、前記大気連通部94Hや前記リンクを錆に強く十分な強度を持つ金属、例えばステンレス、アルミニウムで構成しているので、アウトガスの発生もない。
従って、上記実施形態によれば、高真空を保持でき、信頼性の高い蒸着処理をすることができる。
【0035】
次に、ステップ(6)(8)、即ち蒸着時に基板6とシャドウマスク81とを固定し、安定して蒸着できるようにし、蒸着終了後にその固定を解除する基板マスク固定手段20の本実施形態における実施例を、図9を用いて説明する。図9は、図7に基板マスク固定手段20を付加した図である。図面の複雑さを考慮し、説明に直接関係ない符号を省略している。
本実施形態における基板マスク固定手段20は、基板6とシャドウマスク81を吸着固定する永久磁石21Jを保持する基板マスク吸着体21と、前記基板マスク吸着体21を処理受渡部9の上部から矢印Cのように旋回し、前記基板マスク吸着体21を基板ホルダー91の位置まで移動させる吸着体移動手段である吸着体旋回手段22とからなる。
【0036】
前記基板マスク吸着体21は、旋回して基板ホルダー91に近づくと、非磁性材料の基板6を挟んで、磁性材料で構成されたシャドウマスク81を吸着し始め、近づくにつれて吸着力を強くし、接触すると吸着固定する。このとき、吸着力が強すぎてシャドウマスク81が変形する場合は、接触させずに、適切な吸着力が得られる位置まで旋回させて吸着固定してもよい。その結果、基板6とシャドウマスク81は一体化し、その一体化した状態で蒸着することで安定して確実に蒸着できる。
【0037】
図9において、吸着体旋回手段22は、大別して、旋回対象である基板マスク吸着体21を旋回させるリンク機構22Lと、前記旋回物を矢印Cの方向に前記機構を介して旋回駆動する吸着体旋回駆動部22Bとからなる。
リンク機構22Lは、第1リンク22L1及び第2リンク22L2と、並びにそれらを真空側から隔離するシール部22Sとからなる。リンク機構22Lの基本的な構成は、基板密着手段93の真空内配線リンク機構92Lと同じであるが、次の点が異なる。
【0038】
第1に、本実施形態では、ステップ(6)は、図4に示す基板密着手段93で基板6をシャドウマスクに密着させるステップ(5)の後に行なうので、基板マスク固定手段20を前後に移動させる必要はない。従って、リンクを前後に移動させるためのベローズは不要となり、シール部22Sも真空蒸着チャンバ1buの側壁に第1シール部22s1を、支持部11Aに第2シール部22s2を、リンク機構22が回転可能に設ければよい。逆に言えば、前記動作フロー(5)の前に行なうのであれば、真空内配線リンク機構92Lと同一構造とし、基板旋回手段92と同様に吸着体旋回手段22全体を前後に移動させることが必要である。
【0039】
第2に、真空内配線リンク機構92Lのリンクは配線をするために中空であったが、リンク機構22Lでは配線がないので必ずしも中空である必要はない。
また、第2リンク22L2の支持部11A内の回転支持体(図示せず)において、仮に粉塵が発生しても、真空内配線リンク機構92Lの第2リンクの支持体と同一空間を有しているので、前記真空内配線リンク機構92Lを介して前記粉塵を大気側に排気することが可能である。
【0040】
一方、吸着体旋回駆動部22Bは、前述した旋回駆動部92Bとパワー的な規模は異なるものの、基本的には旋回駆動部92Bと同一の構造を有している。従って、基板旋回手段92における符号番号を92から22に置換えることができるので、ここでは説明を省略する。なお、基板マスク吸着体21の待機位置は、基板旋回手段92の旋回が支障とならないよう、基板旋回手段92の旋回領域の上部に設けるとよい。
【0041】
基板マスク固定手段20の本実施形態によれば、基板マスク吸着体21を処理受渡部9と分離した、あるいは別体の独立した構造とすることができるので、基板マスク吸着体21あるいは処理受渡部9の構成機構を、故障等により交換する必要が生じても、基板マスク吸着体21については、処理受渡部9に関係なく、基板マスク吸着体21のみを交換すればよく、処理受渡部9については、基板マスク吸着体21に関係なく、処理受渡部9のみを交換すればよい。さらに、特に処理受渡部9について言えば、その構造が簡素化し保守し易くなる。従って、保守性の高い基板マスク吸着体あるいは処理受渡部を提供できる。
【0042】
最後に、ステップ(7)の蒸着処理について、本実施形態における実施例を、図3を用いて説明する。蒸着部7は、図3に示すように、蒸着源71をレール76上に沿って上下方向に移動させる上下駆動手段72、蒸着源71をレール75上に沿って左右のアライメント部間移動する左右駆動ベース74を有する。蒸着源71は、内部に蒸着材料である発光材料を有し、前記蒸着材料を加熱制御(図示せず)することによって安定した蒸発速度が得られ、図3の引出し図に示すように、ライン状に並んだ複数の噴射ノズルから噴射73される構造となっている。必要により、安定した蒸着が得られるように添加剤も同時に加熱して蒸着する。
【0043】
なお、上記説明では有機ELデバイスを例に説明したが、有機ELデバイスと同じ背景にある蒸着処理をする成膜装置にも適用できる。
【符号の説明】
【0044】
1:処理チャンバ、1bu:真空蒸着チャンバ、2:搬送チャンバ、3:ロードクラスタ、6:基板、7:蒸着部、8:アライメント部、9:処理受渡部、11:仕切り部、20:基板マスク固定手段、21:永久磁石を保持する基板マスク吸着体、21J:永久磁石、22:吸着体旋回手段、22B:吸着体旋回駆動部、23:電磁石を保持する基板マスク吸着体、23d:電磁石、23H:23の収納ケース、60:制御装置、61:基板クランプ、62:クランプ支持金具、62a:第1の腕、62b:第2の腕、62c:第1の軸、63:巻きバネ、64:回転部、64c:第2の軸、65:固定金具、66:基板受けピン、67:クランプ開閉ピン、68:基板ホルダー昇降機構、69:固定ベース、71:蒸発源、81:シャドウマスク、81a〜d:回転支持部、82:アライメントベース、83:アライメント駆動部、83Z:Z軸駆動部、83X:X軸駆動部、84:アライメント従動部、85:アライメント光学系、91:基板ホルダー、91a:貫通穴、91b:垂直端部、91c:水平端部、91d:貫通穴、91e:基板ホルダーサポート、92:基板旋回手段、93:基板密着手段、94H:大気連通部、100:有機ELデバイスの製造装置、A〜D:クラスタ。
【特許請求の範囲】
【請求項1】
真空処理室内に設けられ基板を載置するための基板ホルダーと、
前記真空処理室外に設けられた基板搬送機から基板を受取るための、前記真空処理室内に垂直方向に立設して固定された基板受けピンと、
前記基板受けピンに対し前記基板ホルダーを昇降させる基板ホルダー昇降機構と、
前記基板ホルダーの端部に設けられ、基板を前記基板ホルダーに保持するための基板保持機構と、
基板を前記基板保持機構から解放するための、前記真空処理室内に垂直方向に立設して固定されたクランプ開閉ピンとを備え、
前記基板保持機構は、基板を前記基板ホルダーに押圧する板状の基板クランプと、前記基板クランプを支持するクランプ支持金具と、前記基板クランプが基板を前記基板ホルダーに押圧するように付勢するバネとを有し、
前記クランプ支持金具は、水平方向の第1の軸を中心にして回転動作可能であり、前記第1の軸から延伸する第1の腕と第2の腕を有し、前記第1の腕の端には前記基板クランプの一端が固定され、前記第2の腕の端には、水平方向の第2の軸を中心にして回転動作可能な回転部が設けられ、前記第1の軸と前記2つの腕の端を結ぶ直線が3角形を形成する形状であって、
前記真空処理室外に設けられた基板搬送機から前記基板受けピンが基板を受取る状態では、前記第2の腕の回転部が前記クランプ開閉ピンにより押し上げられて、前記第1の腕と第2の腕を結ぶ直線が略水平の状態かつ前記基板クランプが略垂直の状態になり、前記受取った基板を前記基板ホルダーに載置した状態では、前記第1の腕と第2の腕を結ぶ直線が略垂直の状態かつ前記基板クランプが略水平の状態になり、前記基板クランプが基板を前記基板ホルダーに押圧する状態になることを特徴とする有機ELデバイス製造装置。
【請求項2】
前記基板保持機構が、前記基板ホルダーの垂直端部に設けられたことを特徴とする、請求項1に記載された有機ELデバイス製造装置。
【請求項3】
前記基板ホルダー昇降機構が、前記真空処理室外に設けられたことを特徴とする、請求項1又は請求項2に記載された有機ELデバイス製造装置。
【請求項1】
真空処理室内に設けられ基板を載置するための基板ホルダーと、
前記真空処理室外に設けられた基板搬送機から基板を受取るための、前記真空処理室内に垂直方向に立設して固定された基板受けピンと、
前記基板受けピンに対し前記基板ホルダーを昇降させる基板ホルダー昇降機構と、
前記基板ホルダーの端部に設けられ、基板を前記基板ホルダーに保持するための基板保持機構と、
基板を前記基板保持機構から解放するための、前記真空処理室内に垂直方向に立設して固定されたクランプ開閉ピンとを備え、
前記基板保持機構は、基板を前記基板ホルダーに押圧する板状の基板クランプと、前記基板クランプを支持するクランプ支持金具と、前記基板クランプが基板を前記基板ホルダーに押圧するように付勢するバネとを有し、
前記クランプ支持金具は、水平方向の第1の軸を中心にして回転動作可能であり、前記第1の軸から延伸する第1の腕と第2の腕を有し、前記第1の腕の端には前記基板クランプの一端が固定され、前記第2の腕の端には、水平方向の第2の軸を中心にして回転動作可能な回転部が設けられ、前記第1の軸と前記2つの腕の端を結ぶ直線が3角形を形成する形状であって、
前記真空処理室外に設けられた基板搬送機から前記基板受けピンが基板を受取る状態では、前記第2の腕の回転部が前記クランプ開閉ピンにより押し上げられて、前記第1の腕と第2の腕を結ぶ直線が略水平の状態かつ前記基板クランプが略垂直の状態になり、前記受取った基板を前記基板ホルダーに載置した状態では、前記第1の腕と第2の腕を結ぶ直線が略垂直の状態かつ前記基板クランプが略水平の状態になり、前記基板クランプが基板を前記基板ホルダーに押圧する状態になることを特徴とする有機ELデバイス製造装置。
【請求項2】
前記基板保持機構が、前記基板ホルダーの垂直端部に設けられたことを特徴とする、請求項1に記載された有機ELデバイス製造装置。
【請求項3】
前記基板ホルダー昇降機構が、前記真空処理室外に設けられたことを特徴とする、請求項1又は請求項2に記載された有機ELデバイス製造装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−93279(P2013−93279A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−235965(P2011−235965)
【出願日】平成23年10月27日(2011.10.27)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【出願人】(512187343)三星ディスプレイ株式會社 (73)
【氏名又は名称原語表記】Samsung Display Co.,Ltd.
【住所又は居所原語表記】95,Samsung 2 Ro,Giheung−Gu,Yongin−City,Gyeonggi−Do,Korea
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月27日(2011.10.27)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【出願人】(512187343)三星ディスプレイ株式會社 (73)
【氏名又は名称原語表記】Samsung Display Co.,Ltd.
【住所又は居所原語表記】95,Samsung 2 Ro,Giheung−Gu,Yongin−City,Gyeonggi−Do,Korea
【Fターム(参考)】
[ Back to top ]