
材料充填装置
【課題】粘度の高い材料であっても、効率よく、かつ、気泡が混入しないように充填することが可能で、さらに、複数の容器に均等に材料を充填することが可能で、かつ、構成が単純な材料充填装置を提供する。
【解決手段】材料充填装置1は、第1容器20に保持された材料Mを複数の第2容器120に充填する装置であって、側面22に複数の貫通穴30が形成された第1容器と、第1容器の外側の領域で第2容器を保持する第2容器保持部40とを有する材料移送ユニットと、材料移送ユニットを所定の回転軸線を中心に回転させて、材料を、貫通穴を介して第2容器に移送させる回転駆動機構200と、を含む。第1容器の内壁面24は下部領域32及び上部領域34を有し、下部領域は、上部領域側を向く傾斜面となっており、上部領域は、下部領域側を向く傾斜面となっており、貫通穴は、開口が上部領域に配置されるように形成されている。
【解決手段】材料充填装置1は、第1容器20に保持された材料Mを複数の第2容器120に充填する装置であって、側面22に複数の貫通穴30が形成された第1容器と、第1容器の外側の領域で第2容器を保持する第2容器保持部40とを有する材料移送ユニットと、材料移送ユニットを所定の回転軸線を中心に回転させて、材料を、貫通穴を介して第2容器に移送させる回転駆動機構200と、を含む。第1容器の内壁面24は下部領域32及び上部領域34を有し、下部領域は、上部領域側を向く傾斜面となっており、上部領域は、下部領域側を向く傾斜面となっており、貫通穴は、開口が上部領域に配置されるように形成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、材料充填装置、特に、遠心力を利用して、所与の容器に収納された材料を他の容器に充填する材料充填装置に関する。
【背景技術】
【0002】
遠心力を利用して材料を充填する装置として、種々の装置が知られている(例えば特許文献1及び特許文献2参照)。これらの充填装置は、遠心力を利用するため、高粘度の材料であっても充填することが可能になる。また、遠心力を利用した材料の充填方法として、特許文献3のように、一つの容器(貯留タンク)内の材料(液晶L)を、複数の容器(容器)に充填する方法が知られている。さらに、材料が収納された容器を自転させながら公転させることによって材料を攪拌脱泡する装置(自転・公転方式の攪拌脱泡装置)が知られている(特許文献4参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002-80005号公報
【特許文献2】特開2003-201000号公報
【特許文献3】特開平7-281200号公報
【特許文献4】特開2000-271465号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術では、粘性材料を一旦、ロッド状、小塊状、または薄膜状の形状にしてから吐出容器に充填するため、作業効率を高めることが困難である。また、特許文献2に記載された技術では、装置構成が大型化しやすく、また、部品点数が多いため部品洗浄の手間がかかるおそれがある。さらに、特許文献3に記載された技術では、特に材料が高粘度になる程、材料を貯留タンクに移送する時間がかかり、かつ、材料を貯留タンクに移送する際に材料に空気が混入するおそれがある。
【0005】
また、特許文献4に記載されている自転・公転方式の攪拌脱泡装置は、材料を攪拌する(混練する、混合する、分散させる)とともに、材料に内在する気泡を放出させる(すなわち脱泡する)ことが可能で、はんだペーストや液晶パネルのシーラント剤などの電子部品材料の製造に利用されることがあった。ところで、電子部品材料は、通常、シリンジと呼ばれる容器に充填され、ディスペンサによって精密に塗布・吐出されるが、自転・公転方式の攪拌脱泡装置では、材料を精度よく処理するために、シリンジとは形状の異なる専用の容器が利用されることが一般的である。そのため、上記した自転・公転方式の攪拌脱泡装置によって精度よく攪拌脱泡された材料は、攪拌脱泡の専用容器からシリンジへ充填されて使用されることになる。しかしながら、専用容器からシリンジへの充填時に、材料に気泡が混入してしまうと、自転・公転方式の攪拌脱泡装置の性能を生かしきれない事態が発生しうる。このことから、自転・公転方式の攪拌脱泡装置によって処理された材料を、専用容器から、短時間で、気泡が混入しないようにシリンジに充填することが可能な技術の出現が待たれていた。
【0006】
本発明の一つの態様は、粘度の高い材料であっても、効率よく、かつ、気泡が混入しないように充填することが可能で、さらに、複数のシリンジ容器に均等に材料を充填することが可能な材料充填方法、及び、これを実現することが可能で、かつ、構成が単純な材料充填装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明に係る材料充填装置は、
第1容器に保持された材料を複数の第2容器に充填する材料充填装置であって、
側面に複数の貫通穴が形成された第1容器と、前記第1容器の外側の領域で複数の第2容器を保持する第2容器保持部とを有する材料移送ユニットと、
前記材料移送ユニットを前記第1容器の内側を通る所定の回転軸線を中心に回転させて、前記第1容器に保持された材料に前記側面に向く遠心力を作用させ、前記材料を、前記複数の貫通穴を介して前記複数の第2容器に移送させる回転駆動機構と、
を含み、
前記第1容器の内壁面は、鉛直方向に配列された下部領域及び上部領域を有し、
前記下部領域は、前記上部領域側を向く傾斜面となっており、
前記上部領域は、前記下部領域側を向く傾斜面となっており、
前記複数の貫通穴は、開口が前記上部領域に配置されるように形成されている。
【0008】
本発明によると、材料を第2容器に移送充填する際に、材料を、複数の貫通穴に(ほぼ)同時に接触させることができ、それぞれの第2容器への充填量のばらつきを小さくすることができる。
【0009】
(2)この材料充填装置において、
前記複数の貫通穴は、開口が前記下部領域に隣接した位置に配置されるように形成されていてもよい。
【0010】
(3)この材料充填装置において、
前記第1容器保持部と、前記中継部材及び前記第2容器保持部とが同じ回転数で回転するように構成されていてもよい。
【図面の簡単な説明】
【0011】
【図1】本発明に係る材料充填装置の構成を説明するための図である。
【図2】本発明に係る材料充填装置の構成を説明するための図である。
【図3】本発明に係る材料充填装置の構成を説明するための図である。
【図4】本発明に係る材料充填装置の動作を説明するための図である。
【図5】本発明に係る材料充填装置の動作を説明するための図である。
【図6】本発明に係る材料充填装置の動作を説明するための図である。
【図7】本発明に係る材料充填装置の動作を説明するための図である。
【図8】本発明に係る材料充填装置の動作を説明するための図である。
【図9】本発明に係る材料充填装置の動作を説明するための図である。
【図10】自転・公転式の攪拌脱泡装置の原理を説明するための図である。
【図11】変形例に係る材料充填装置の構成を説明するための図である。
【発明を実施するための形態】
【0012】
以下、本発明を適用した実施の形態について図面を参照して説明する。ただし、本発明は以下の実施の形態に限定されるものではない。すなわち、以下の実施の形態で説明するすべての構成が本発明にとって必須であるとは限らない。また、本発明は、以下の内容を自由に組み合わせたものを含む。
【0013】
(1)材料充填装置1の構成
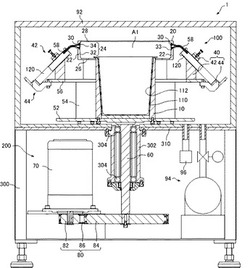
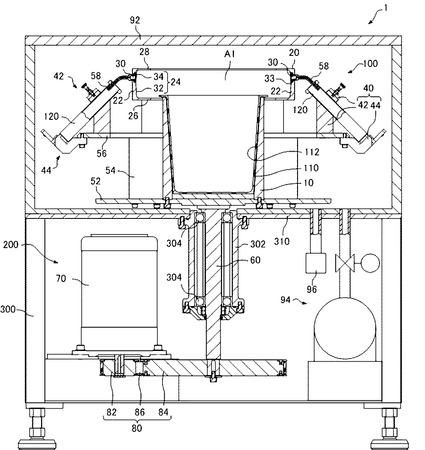
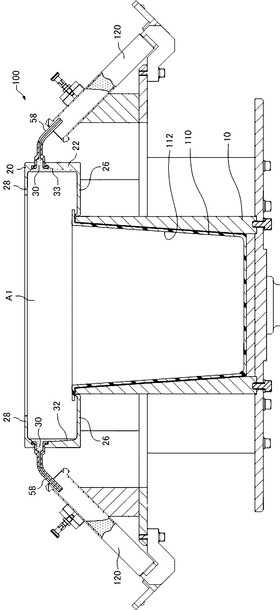
はじめに、本発明を適用した実施の形態に係る材料充填装置1の構成について説明する。図1〜図3は、材料充填装置1の構成について説明するための図である。ここで、図1は材料充填装置1の断面図であり、図2は充填装置ユニット100の斜視図である。材料充填装置1は、1つの収納容器110に収納された材料Mを第1容器20に保持させて、その後、分配して複数の第2容器120に同時に充填する装置として構成される。なお、本実施の形態で適用される収納容器110は、上端が開口しており、内側面112が上端側を向く傾斜面となるように構成されている。また、収納容器110は、内側面112を水平面で切断した断面が円形となるように構成されている。
【0014】
(a)充填装置ユニット100
材料充填装置1は、充填装置ユニット100を有する。以下、充填装置ユニット100の構成を説明する。
【0015】
充填装置ユニット100は、図1に示すように、収納容器保持部10を有する。収納容器保持部10は、収納容器110を保持する役割を果たす。収納容器保持部10は、図1に示すように、収納容器110を、上端(開口)を上に向けた姿勢で保持するように構成されている。なお、収納容器保持部10は、特に図示しないが、その内部で収納容器110が空回りすることを防止するための空回り防止機構を備えた構成とすることが可能である。
【0016】
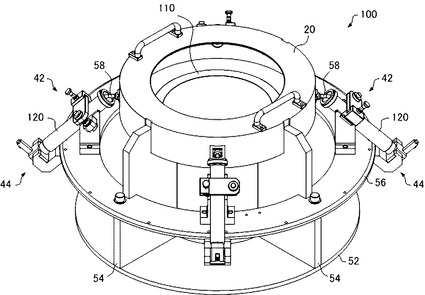
充填装置ユニット100は、図1及び図2に示すように、第1容器20を有する。第1容器20は、収納容器110に収納された材料Mを第2容器120に充填する際に、材料Mを中継する役割を果たす。すなわち、収納容器110に収納された材料Mは、第1容器20に移送されて第1容器20で保持され、その後、第2容器120に移送されることになる。なお、後で詳述するが、本実施の形態では、材料Mは、遠心力の作用によって第1容器20に保持される。また、第1容器20は、中継容器(中継部材)と称することも可能である。
【0017】
第1容器20は、収納容器110の上端を囲繞する側面22を含む。そして、充填装置ユニット100は、収納容器保持部10に収納容器110を取り付けた時に(少なくとも材料充填処理時に)、収納容器110の上端が、第1容器20の内壁面(側面22の内周面24)によって区画された区画領域A1内に配置されるように構成される。なお、本実施の形態では、第1容器20は、側面22(内周面24)の下端から張り出した下部庇部26と、側面22(内周面24)の上端から張り出した上部庇部28とを含んで構成されている。また、本実施の形態では、下部庇部26は上視図において中央が開口した形状となっており、収納容器110は、該開口を貫通する(該開口に挿通される)ように配置される。
【0018】
そして、第1容器20は、区画領域A1の周縁部(内周面24、下部庇部26及び上部庇部28によって区画された領域)で、材料Mを中継する。言い換えると、第1容器20は、区画領域A1の周縁部で、材料Mを一時的に保持することになる。
【0019】
また、本実施の形態では、第1容器20の内周面24は、鉛直方向に配置された下部領域32及び上部領域34を含む。そして、下部領域32は上部領域34側を向く傾斜面となっており、上部領域34は下部領域32側を向く傾斜面となっている。すなわち、第1容器20では、下部領域32の法線が水平方向よりも上方を向くように傾斜し、上部領域34の法線が水平方向よりも下方を向くように傾斜する。また、第1容器20は、内周面24(区画領域A1)を水平面で切断した断面が円形となるように構成されている。
【0020】
また、本実施の形態では、側面22には、第1容器20(側面22)の内側と外側(区画領域A1と第2容器120の内部空間)とを連通するための複数の貫通穴30が形成されている。なお、本実施の形態では、貫通穴30は、開口(区画領域A1側の開口)が、上部領域34に配置されるように形成されている。言い換えると、貫通穴30は、下部領域32を避けて配置される。また、本実施の形態では、貫通穴30は、開口が、上部領域34の下端部に配置されるように形成されている。言い換えると、貫通穴30は、開口が、下部領域32に隣接する位置に配置されるように形成されている。また、本実施の形態では、複数の貫通穴30は、すべて、同一水平面上に、等間隔に配置される。
【0021】
充填装置ユニット100は、図1及び図2に示すように、複数の第2容器保持部40を有する。第2容器保持部40は、第2容器120を保持する役割を果たす。第2容器保持部40は、第1容器20(側面22)よりも外側の領域で、第2容器120を保持するように構成されている。本実施の形態では、第2容器保持部40は、第2容器120の中央部を固定する中央固定部42と、第2容器120の先端部を保持する先端保持部44とを含んで構成されている。そして、この第1容器20と第2容器保持部40とを合わせて、材料移送ユニットと称することができる。
【0022】
本実施の形態では、充填装置ユニット100は、少なくとも材料Mを第2容器120に充填する工程で、収納容器保持部10、及び、第1容器20、第2容器保持部40の相対的な位置関係が変わらないように構成されている。具体的には、充填装置ユニット100は、第1の基板52を有し、収納容器保持部10は、第1の基板52に固定されている。また、充填装置ユニット100は、第1の基板52に固定された4個の支持部材54を有し、第1容器20は支持部材54に固定される。さらに、充填装置ユニット100は、支持部材54に固定された第2の基板56を有し、第2容器保持部40は第2の基板56に固定されている。これにより、充填装置ユニット100を、収納容器保持部10、及び、第1容器20、第2容器保持部40の相対的な位置関係が変わらない構成とすることができる。なお、本実施の形態では、充填装置ユニット100は、第1容器20を着脱することが可能な構成となっている。
【0023】
本実施の形態では、充填装置ユニット100は、材料中継管58をさらに含む。材料中継管58は、一端が第1容器20の貫通穴30に連通するように、第1容器20の外側面に取り付けられる。また、材料中継管58は、他端が第2容器120内に配置されるように取り付けられる。
【0024】
(b)回転駆動機構200
本実施の形態に係る材料充填装置1は、充填装置ユニット100を回転駆動する回転駆動機構200を有する。以下、回転駆動機構200の構成を説明する。
【0025】
回転駆動機構200は、充填装置ユニット100(第1の基板52)に固定された回転軸60を有する。回転軸60は、鉛直方向に延びる棒状の部材である。そして、回転軸60は、その延長線(中心線の延長線)が区画領域A1の中心を通るように、充填装置ユニット100に固定される。また、本実施の形態では、回転軸60は、ベアリング304を介して、支持体300(支持体300に固定されたベアリング保持部材302)に取り付けられている。すなわち、回転軸60は、支持体300に対して回転可能に取り付けられている。これにより、充填装置ユニット100は、第1容器20(区画領域A1)の中心を通る回転軸線を中心に回転可能な態様で、支持体300に保持されることになる。
【0026】
回転駆動機構200は、さらに、モータ70と、モータ70の動力を回転軸60に伝達する動力伝達機構80とを含む。本実施の形態では、図1に示すように、動力伝達機構80は、モータ70の軸に固定されたモータ軸プーリー82と、回転軸60に固定された回転軸プーリー84と、モータ軸プーリー82と回転軸プーリー84との間にかけ回されたベルト86とを含む。なお、本実施の形態では、モータ70として、すでに公知となっているいずれかのモータを利用することができる。例えば本実施の形態では、モータ70として、誘導モータ(インダクションモータ)を適用することができる。なお、誘導モータの回転数は、インバータから出力される交流電力の周波数を制御することにより、任意の値に設定することが可能である。ただし、モータ70として、サーボモータやPMモータを利用することも可能である。
【0027】
これにより、充填装置ユニット100を、区画領域A1の中心を通る、鉛直方向に延びる回転軸線を中心に回転させることが可能になる。
【0028】
(c)収納容器110
次に、本実施の形態に適用可能な収納容器110について説明する。収納容器110は、上端が開口しており、内側面112が上端側を向く傾斜面となるように構成されている。すなわち、収納容器110は、内側面112を水平面で切断した断面の外形が、上端に向かって大きくなるように構成されている。また、収納容器110は、内側面112を水平面で切断した断面が円形となるように構成されている。
【0029】
なお、収納容器110として、上端の開口をふさぐ蓋体を着脱することが可能な容器を適用することもできる。かかる構成とすることで、収納容器110を材料充填装置1(収納容器保持部10)に取り付ける直前まで収納容器110内を気密に保持することができるため、不純物の混入を防止することができる。
【0030】
(d)第2容器120
本実施の形態に適用可能な第2容器120は、特に限定されるものではない。すなわち、第2容器120は、所望の態様で材料を保持することが可能に構成されたいずれかの部材を利用することができる。例えば、第2容器120として、シリンジ容器を利用することができる。あるいは、第2容器120として、金型や、内部空間に液晶が充填される液晶パネル用容器を適用することができる。また、第2容器120として、上端部にキャップが取り付けられたものを利用することも可能である(図示せず)
【0031】
なお、第2容器120は、第2容器保持部40に保持される。そのため、第2容器120は、第1容器20に対して固定され、第1容器20と第2容器120とは一体的に動作することになる。
【0032】
(e)減圧手段
本実施の形態に係る材料充填装置1は、さらに、充填装置ユニット100を格納する気密性のチャンバ92と、チャンバ92内を減圧する減圧手段94とを含む。本実施の形態では、支持体300の横板310上に、チャンバ92が配置される。また、ベアリング保持部材302と回転軸60との間に磁性流体を配置することにより、チャンバ92内を気密に保持することが可能になる。減圧手段94は、減圧ポンプや配管、各種のバルブによって実現することができる。また、本実施の形態に係る材料充填装置1は、チャンバ92内の気圧を測定するためのセンサ96(圧力センサ)を有する構成となっている。
【0033】
(f)制御手段
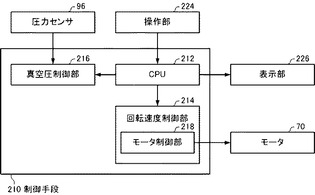
本実施の形態に係る材料充填装置1は、制御手段210を含む。制御手段210は、材料充填装置1の動作を統括制御する役割を果たす。制御手段210は、回転駆動機構200を制御して充填装置ユニット100の回転速度を調整する。制御手段210は、また、チャンバ92内の気圧(真空圧)を制御する。制御手段210は、材料充填装置1をシーケンス制御するように構成することができる。以下、制御手段210について説明する。図3は、制御手段210について説明するための図である。
【0034】
制御手段210は、マイクロプロセッサ(CPU212)と、回転駆動機構200を制御する回転速度制御部214と、チャンバ92内の真空圧(気圧)を制御する真空圧制御部216とを含む。そして、CPU212は、所定のタイミングで回転速度制御部214及び真空圧制御部216に各種の信号を出力することにより、材料充填装置1の動作を制御する。
【0035】
本実施の形態では、回転速度制御部214は、モータ70の回転数を制御するモータ制御部218を含む。例えばモータ70としてインダクションモータを採用する場合には、モータ制御部218は、インバータの動作を制御し、モータ70に供給される交流電力の周波数を所定値とするためのインバータ制御部によって実現することができる。あるいは、モータ70としてサーボモータを採用する場合には、モータ制御部218は、専用のドライバ及びハードウェアによって実現され、モータ70を所望の回転数で動作させるための各種処理を行う。
【0036】
真空圧制御部216は、減圧ポンプの動作を制御するポンプ制御部と、減圧手段94に含まれる各種弁の開閉を切り替えるスイッチング素子によって実現することができる。なお、真空圧制御部216は、センサ96が検出したチャンバ92内の圧力情報に基づいて、減圧ポンプの動作を制御するように構成することが可能である。
【0037】
そして、CPU212は、所定のタイミングで、回転速度制御部214及び真空圧制御部216に各種の信号(充填装置ユニット100の回転速度データや真空圧データ等)を送信する処理を行う。これにより、充填装置ユニット100を所定の速度(角速度・回転数)で回転させることができ、かつ、チャンバ92内を所望の真空圧に設定することができる。
【0038】
また、CPU212は、操作部224から入力された動作データ(充填装置ユニット100の回転速度データや真空圧データ、運転時間データ等)を受け付けて、図示しない記憶部に格納する処理や、表示部226に各種情報(操作部224から入力された動作データや、充填装置ユニット100の回転速度、チャンバ92内の真空圧、経過時間等)を表示させるための処理を行う。
【0039】
(2)材料充填装置1の動作
次に、本実施の形態に係る材料充填装置1の動作について、図4〜図8を参照して説明する。
【0040】
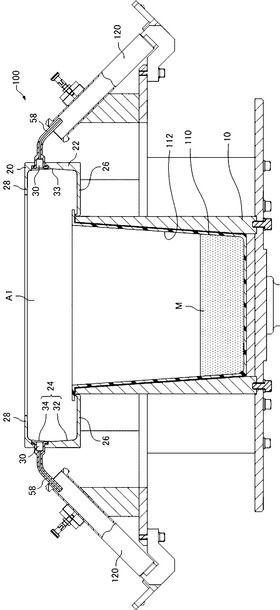
材料充填装置1を動作させる準備として、図4に示すように、材料Mが収納された収納容器110を収納容器保持部10に保持させ、第2容器120を第2容器保持部40に保持させて、かつ、貫通穴30を介して第1容器20の区画領域A1と第2容器120とを連通させる。
【0041】
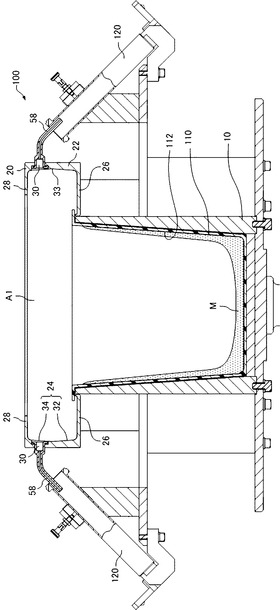
そして、回転駆動機構200の駆動を開始することによって充填装置ユニット100(材料移送ユニット)を回転させる。充填装置ユニット100が回転すると、材料Mには遠心力が作用し、材料Mは収納容器110の内側面112に押し付けられる。ここで、内側面112は収納容器110の上端側を向く傾斜面となっているため、材料Mは、内側面112に押し付けられると、内側面112に沿って収納容器110の上端に向かう力が作用することになる。すなわち、材料Mは、図5に示すように、内側面112に沿って薄く拡がりながら(パイプ形状となりながら)、内側面112に沿って上端に向かって移動する。そして、本実施の形態では、収納容器110の上端が開口しているため、材料Mは、上端の開口を通して収納容器110から排出される。
【0042】
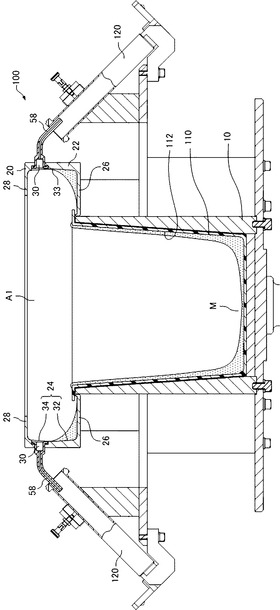
ところで、充填装置ユニット100は、第1容器20の側面22が、収納容器110の上端(開口)を囲繞するように構成されている。言い換えると、充填装置ユニット100では、収納容器110の上端(開口)が、区画領域A1内に配置される。また、第1容器20も回転しているため、第1容器20内でも、材料Mは遠心力の影響を受けて、区画領域A1の周縁部(内周面24)に押し付けられる。このことから、収納容器110の上端の開口から排出された材料Mは、第1容器20に移送され、図6に示すように、区画領域A1の周縁部に保持されることになる。
【0043】
そして、第1容器20に移送された材料Mは、第1容器20内で遠心力を受けて下部領域32に押し付けられると、下部領域32の表面を、上方(上部領域34/下部領域32及び上部領域34の境界領域33)に向かって移動する。ところで、第1容器20には、開口が上部領域34に配置されるように、貫通穴30が形成されている。そのため、材料Mは、第1容器20に移送されて下部領域32を上部領域34に向かって移動し、図6に示すように、貫通穴30(開口)に接触する前に、境界領域33に至ることになる。そして、第1容器20では、上部領域34は下部領域32を向く傾斜面となっていることから、材料Mは、境界領域33に至ると上方への推進力を失って第1容器20の周方向へ拡がり、境界領域33を満たすことになる。そしてこの過程で、第1容器20内で、材料Mの高さが、周方向に一定となる。言い換えると、材料Mは、第1容器20内で、充填装置ユニット100の回転軸線を中心とする点対称形となる。
【0044】
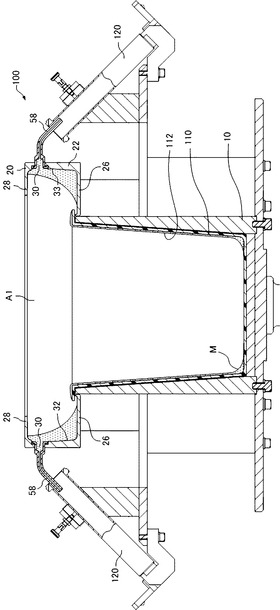
充填装置ユニット100をさらに回転させると、第1容器20に移送されて境界領域33に向かう材料Mの量が増し、それに伴って材料Mが上方向に拡がるため、図7に示すように、材料Mは貫通穴30(開口)に接触する。そして、材料Mは、貫通穴30(材料中継管58)から排出されることになる。ここで、本実施の形態では、充填装置ユニット100は、貫通穴30を介して区画領域A1と第2容器120の内部空間が連通されている。そのため、貫通穴30から排出された材料は、図8に示すように、第2容器120の内部空間に移送されることになる。
【0045】
すなわち、本実施の形態に係る材料充填装置1では、遠心力を利用して、収納容器110に収納された材料Mを第1容器20の区画領域A1の周縁部に移送し、さらに、貫通穴30(材料中継管58)を介して第2容器120に移送することにより、収納容器110に収納された材料Mを第2容器120に充填する。
【0046】
また、この材料充填装置1は、上端が開口しており、内側面が上端側を向く傾斜面となっている収納容器110に収納された材料Mを、複数の第2容器120に充填する材料充填装置であって、
上端を上に向けた姿勢で収納容器110を保持する収納容器保持部10と、上端を囲繞する側面22を有し、内周面24によって区画された区画領域A1の周縁部で材料Mを中継する第1容器20と、第1容器20よりも外側の領域で複数の第2容器120を保持する第2容器保持部40とを有する充填装置ユニット100と、
充填装置ユニット100を、区画領域A1の中心を通り、鉛直方向に延びる回転軸線を中心に回転させる回転駆動機構200と、
を含み、
第1容器20の側面には、貫通穴30が形成されており、
第1容器20の内壁面24は、鉛直方向に配列された下部領域32及び上部領域34を有し、
下部領域32は、上部領域34側を向く傾斜面となっており、
上部領域34は、下部領域32側を向く傾斜面となっており、
複数の貫通穴30は、開口が上部領域34に配置されるように形成されている材料充填装置であるといえる。
【0047】
また、材料充填装置1は、チャンバ92と、チャンバ92内を減圧する減圧手段94とを含んで構成されている。そのため、収納容器110に収納された材料Mを第2容器120に充填する工程を、チャンバ92内を減圧した状態で行うことが可能である。具体的には、収納容器110及び第2容器120を充填装置ユニット100に保持させた後にチャンバ92内を減圧し、その後、モータ70を駆動させることにより、減圧環境下で、材料Mの充填処理を行うことが可能になる。
【0048】
(3)材料充填方法
次に、本実施の形態に係る材料充填方法について、図9のフローチャート図を参照して説明する。
【0049】
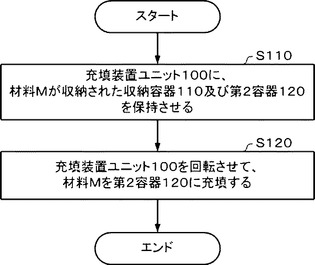
本実施の形態に係る材料充填方法は、図9に示すように、充填装置ユニット100に材料Mが収納された収納容器110及び第2容器120を保持させる(収納容器保持部10に収納容器110を保持させ、第2容器保持部40に第2容器120を保持させる)工程(ステップS110)と、充填装置ユニット100(材料移送ユニット)を回転させて、材料Mを第2容器120に充填する工程(ステップS120)とを含む。なお、充填装置ユニット100の回転数や回転時間は、材料Mを第2容器120に充填する処理に必要な値であれば足り、その具体的な数値は実験により導出することができる。
【0050】
(4)材料M
本実施の形態に適用可能な材料Mは、流体として挙動するものであればよく、その組成や用途は特に限定されるものではない。材料Mとして、例えば、接着剤、シーラント剤、液晶材料、半田ペースト、成型に利用される硬化性の樹脂材料、歯科用印象材料、歯科用セメント(穴埋め剤等)、粘性の強い液状の薬剤や、粒状体等の種々の材料を適用することができる。
【0051】
(5)効果
以下、本実施の形態が奏する作用効果について説明する。
【0052】
材料充填装置1によると、遠心力を利用して、収納容器110に収納された材料Mを第2容器120に充填する。そのため、材料Mに大きな力を作用させることが可能になるため、粘度の高い材料であっても、効率よく第2容器120に充填(移送)することができる。また、材料Mに大きな力を作用させることから、収納容器110及び第1容器20に残る材料の量を極めて少なくすることができ、材料Mの効率的な利用が可能になる。
【0053】
また、材料充填装置1によると、材料充填処理を、すべて、遠心力を利用して実現することができる。そのため、材料充填時に、ヘラなどの部材を利用する必要がなくなるため、材料に不純物が混入しないように材料充填処理を行うことが可能になる。
【0054】
また、材料充填装置1によると、材料充填処理時に、第1及び第2容器110,120以外では、第1容器20(第1容器20及び材料中継管58)のみに材料Mが接触することになる。そのため、洗浄を要する部品の点数を少なくすることができる。
【0055】
また、材料充填装置1によると、収納容器110は、内側面112が上端側を向く傾斜面となっており、かつ、収納容器保持部10に保持されたときに上端(開口)が第1容器20の区画領域A1内に配置することが可能に構成されていればよく、その形状は限定されるものではない。そのため、種々の容器(収納容器110)に対応することが可能な材料充填装置を提供することができる。また、材料充填装置1によると、材料Mは、第1容器20から第2容器120に移送される。そのため、収納容器110は材料Mを第1容器20に移送することが可能に構成されていれば足り、厳密な加工精度が要請されるものではない。
【0056】
また、材料充填装置1によると、材料Mが収納容器110から排出される際に、材料Mは、薄く拡がった状態となって、内側面112に沿って上端(開口)に向かって移動する(図5参照)。すなわち、材料Mは、厚みが小さい状態で遠心力を受けることになる。そのため、材料Mに混入した気泡がある場合でも、遠心力の作用により気泡を放出させることができるため、材料充填工程で材料Mを脱泡処理することが可能になる。
【0057】
なお、本実施の形態では、材料充填装置1は、チャンバ92及び減圧手段94を有する。そのため、材料充填処理時に、材料Mに混入した気泡を効率よく放出させることができる。
【0058】
さらに、本実施の形態では、第1容器20(側面22)に複数の貫通穴30が形成されており、該複数の貫通穴30を介して、区画領域A1と複数の第2容器120の内部空間とが連通されている。そのため、収納容器110に収納された材料Mを、複数の第2容器120に分配して同時に充填することが可能な、効率のよい材料充填装置を提供することができる。なお、第1容器20が、内周面24の水平断面が円形となるように構成されている場合、第1容器20の中心と各貫通穴30との距離が等しくなるため、複数の貫通穴30近傍では、材料Mには同じ大きさの力がかかることになる。そのため、複数の貫通穴30のそれぞれから、同量の材料Mを排出させることができ、複数の第2容器120に、均等に材料Mを充填させることができる。
【0059】
そして、先に説明したように、本実施の形態では、第1容器20には、開口が上部領域34に配置されるように貫通穴30が形成されており、第1容器20に移送された材料Mは、下部領域32及び上部領域34の境界領域33に至ると、高さのばらつきが小さくなる。また、材料充填装置1によると、その後も、第1容器20内での高さが大きくばらつかないように、材料Mを上方(貫通穴30)に向けて拡げることができる。そのため、材料Mを第2容器120に移送する処理の開始時において、材料Mを、すべての貫通穴30に(ほぼ)同時に接触させることができる。このことから、すべての第2容器120への材料Mの移送が、(ほぼ)同時に開始されることになり、それぞれの第2容器120に充填される材料Mの量のばらつきを軽減することが可能になる。
【0060】
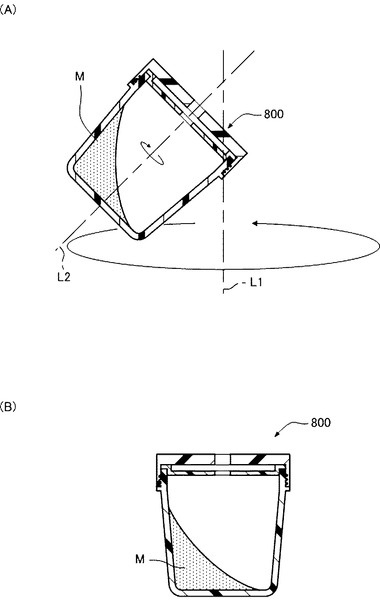
特に、本実施の形態によると、収納容器110内に材料Mが偏在している場合であっても、材料Mを複数の第2容器120に均等に分配充填する処理を、短時間に行うことが可能になる。そのため、いわゆる自転・公転方式の攪拌脱泡装置で処理された材料であっても、複数の第2容器120に均等に分配充填することができる。詳しくは、現在主流となっている自転・公転方式の攪拌脱泡装置として、図10(A)に示すように、材料Mが収納された収納容器800を、鉛直に延びる公転軸線L1を中心に公転させながら、公転軸線L1と斜めに交差する自転軸線L2を中心に自転させるように構成されている装置が知られている。この装置では材料Mに高い遠心力が作用するため、材料Mは、公転軸線L1から最も遠い領域に集められ、収納容器800内で材料が偏在することになる。そして、材料Mの粘度が高い場合には、攪拌脱泡装置から収納容器800を取り出した後であっても材料Mが大きく流動しないため、図10(B)に示すように、収納容器800内で材料が偏在した状態が維持されることがある。
【0061】
ところで本実施の形態によると、第1容器20内で、材料Mの高さのばらつきを小さくすることができる。そのため、収納容器110に収納された材料Mを、自転・公転方式の攪拌脱泡装置で処理した後に、直ちに材料Mの充填処理(充填装置ユニット100の回転駆動)を開始させる場合であっても、材料Mを複数の第2容器120に均等に分配充填することが可能になる。なお、図10(A)及び図10(B)に示す例では、収納容器800には蓋体が取り付けられており、これにより攪拌脱泡中に材料Mが漏れることを防止することができる。また、蓋体の中央に貫通穴が形成されていることから、減圧雰囲気中で収納容器800を自転・公転させれば、収納容器800の内部が減圧された状態で材料Mの攪拌脱泡処理を行うことが可能になるため、高い脱泡性能を実現することができる。
【0062】
(6)変形例
次に、本実施の形態に係る材料充填装置の変形例について説明する。図11は、本変形例に係る材料充填装置の構成について説明するための図である。
【0063】
本変形例では、材料充填装置は、第1容器20にかえて、図11に示す第1容器420を含む。以下、第1容器420の構成について説明する。
【0064】
第1容器420は、側面422を有する。そして、側面422の内周面424は、後述する上面480側を向く傾斜面となっている。言い換えると、側面422は、内周面424の水平断面の外形が、鉛直上方に向かって大きくなるように構成されている。あるいは、側面422は、内周面424の法線が水平面よりも上方を向くように傾斜しているといえる。
【0065】
第1容器420は、底面470を有する。底面470は、側面422(内周面424)の下端に延設されている。底面470は、中央部472と、周縁部474と、中央部472及び周縁部474をつなぐ延設部476とを有する。なお、第1容器420では、周縁部474(側面422の下端部)は、中央部472よりも鉛直下方に配置される。そして、延設部476は、周縁部474に近づくほど高さが低くなるように傾斜している。
【0066】
第1容器420は、上面480を有する。上面480は、側面422(内周面424)の上端に延設される庇状の部材である。そして、本変形例では、上面480の周縁部には、複数の貫通穴430が形成されている。
【0067】
この第1容器420を利用した場合でも、材料Mを第2容器120に移送する処理の開始時において、材料Mを、すべての貫通穴30に(ほぼ)同時に接触させることができる。このことから、すべての第2容器120への材料Mの移送が、(ほぼ)同時に開始されることになり、それぞれの第2容器120に充填される材料Mの量のばらつきを軽減することが可能になる。
【0068】
また、第1容器420の底面470は、傾斜する延設部476を有する。そのため、材料充填処理時に第1容器420内に多量の材料Mが残った場合であっても、材料Mが第1容器420からこぼれ出ることを防止することが可能になる。
【符号の説明】
【0069】
1…材料充填装置、 10…収納容器保持部、 20…第1容器、 22…側面、 24…内壁面、 26…下部庇部、 28…上部庇部、 30…貫通穴、 32…下部領域、 33…境界領域、 34…上部領域、 40…第2容器保持部、 42…中央固定部、 44…先端保持部、 52…第1の基板、 54…支持部材、 56…第2の基板、 58…材料中継管、 60…回転軸、 70…モータ、 80…動力伝達機構、 82…モータ軸プーリー、 84…回転軸プーリー、 86…ベルト、 92…チャンバ、 94…減圧手段、 96…センサ、 100…充填装置ユニット、 110…収納容器、 112…内側面、 120…第2容器、 200…回転駆動機構、 210…制御手段、 214…回転速度制御部、 216…真空圧制御部、 218…モータ制御部、 224…操作部、 226…表示部、 300…支持体、 302…ベアリング保持部材、 304…ベアリング、 420…第1容器、 422…側面、 424…内周面、 430…貫通穴、 470…底面、 472…中央部、 474…周縁部、 476…延設部、 480…上面、 800…収納容器、 A1…区画領域、 M…材料
【技術分野】
【0001】
本発明は、材料充填装置、特に、遠心力を利用して、所与の容器に収納された材料を他の容器に充填する材料充填装置に関する。
【背景技術】
【0002】
遠心力を利用して材料を充填する装置として、種々の装置が知られている(例えば特許文献1及び特許文献2参照)。これらの充填装置は、遠心力を利用するため、高粘度の材料であっても充填することが可能になる。また、遠心力を利用した材料の充填方法として、特許文献3のように、一つの容器(貯留タンク)内の材料(液晶L)を、複数の容器(容器)に充填する方法が知られている。さらに、材料が収納された容器を自転させながら公転させることによって材料を攪拌脱泡する装置(自転・公転方式の攪拌脱泡装置)が知られている(特許文献4参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002-80005号公報
【特許文献2】特開2003-201000号公報
【特許文献3】特開平7-281200号公報
【特許文献4】特開2000-271465号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術では、粘性材料を一旦、ロッド状、小塊状、または薄膜状の形状にしてから吐出容器に充填するため、作業効率を高めることが困難である。また、特許文献2に記載された技術では、装置構成が大型化しやすく、また、部品点数が多いため部品洗浄の手間がかかるおそれがある。さらに、特許文献3に記載された技術では、特に材料が高粘度になる程、材料を貯留タンクに移送する時間がかかり、かつ、材料を貯留タンクに移送する際に材料に空気が混入するおそれがある。
【0005】
また、特許文献4に記載されている自転・公転方式の攪拌脱泡装置は、材料を攪拌する(混練する、混合する、分散させる)とともに、材料に内在する気泡を放出させる(すなわち脱泡する)ことが可能で、はんだペーストや液晶パネルのシーラント剤などの電子部品材料の製造に利用されることがあった。ところで、電子部品材料は、通常、シリンジと呼ばれる容器に充填され、ディスペンサによって精密に塗布・吐出されるが、自転・公転方式の攪拌脱泡装置では、材料を精度よく処理するために、シリンジとは形状の異なる専用の容器が利用されることが一般的である。そのため、上記した自転・公転方式の攪拌脱泡装置によって精度よく攪拌脱泡された材料は、攪拌脱泡の専用容器からシリンジへ充填されて使用されることになる。しかしながら、専用容器からシリンジへの充填時に、材料に気泡が混入してしまうと、自転・公転方式の攪拌脱泡装置の性能を生かしきれない事態が発生しうる。このことから、自転・公転方式の攪拌脱泡装置によって処理された材料を、専用容器から、短時間で、気泡が混入しないようにシリンジに充填することが可能な技術の出現が待たれていた。
【0006】
本発明の一つの態様は、粘度の高い材料であっても、効率よく、かつ、気泡が混入しないように充填することが可能で、さらに、複数のシリンジ容器に均等に材料を充填することが可能な材料充填方法、及び、これを実現することが可能で、かつ、構成が単純な材料充填装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明に係る材料充填装置は、
第1容器に保持された材料を複数の第2容器に充填する材料充填装置であって、
側面に複数の貫通穴が形成された第1容器と、前記第1容器の外側の領域で複数の第2容器を保持する第2容器保持部とを有する材料移送ユニットと、
前記材料移送ユニットを前記第1容器の内側を通る所定の回転軸線を中心に回転させて、前記第1容器に保持された材料に前記側面に向く遠心力を作用させ、前記材料を、前記複数の貫通穴を介して前記複数の第2容器に移送させる回転駆動機構と、
を含み、
前記第1容器の内壁面は、鉛直方向に配列された下部領域及び上部領域を有し、
前記下部領域は、前記上部領域側を向く傾斜面となっており、
前記上部領域は、前記下部領域側を向く傾斜面となっており、
前記複数の貫通穴は、開口が前記上部領域に配置されるように形成されている。
【0008】
本発明によると、材料を第2容器に移送充填する際に、材料を、複数の貫通穴に(ほぼ)同時に接触させることができ、それぞれの第2容器への充填量のばらつきを小さくすることができる。
【0009】
(2)この材料充填装置において、
前記複数の貫通穴は、開口が前記下部領域に隣接した位置に配置されるように形成されていてもよい。
【0010】
(3)この材料充填装置において、
前記第1容器保持部と、前記中継部材及び前記第2容器保持部とが同じ回転数で回転するように構成されていてもよい。
【図面の簡単な説明】
【0011】
【図1】本発明に係る材料充填装置の構成を説明するための図である。
【図2】本発明に係る材料充填装置の構成を説明するための図である。
【図3】本発明に係る材料充填装置の構成を説明するための図である。
【図4】本発明に係る材料充填装置の動作を説明するための図である。
【図5】本発明に係る材料充填装置の動作を説明するための図である。
【図6】本発明に係る材料充填装置の動作を説明するための図である。
【図7】本発明に係る材料充填装置の動作を説明するための図である。
【図8】本発明に係る材料充填装置の動作を説明するための図である。
【図9】本発明に係る材料充填装置の動作を説明するための図である。
【図10】自転・公転式の攪拌脱泡装置の原理を説明するための図である。
【図11】変形例に係る材料充填装置の構成を説明するための図である。
【発明を実施するための形態】
【0012】
以下、本発明を適用した実施の形態について図面を参照して説明する。ただし、本発明は以下の実施の形態に限定されるものではない。すなわち、以下の実施の形態で説明するすべての構成が本発明にとって必須であるとは限らない。また、本発明は、以下の内容を自由に組み合わせたものを含む。
【0013】
(1)材料充填装置1の構成
はじめに、本発明を適用した実施の形態に係る材料充填装置1の構成について説明する。図1〜図3は、材料充填装置1の構成について説明するための図である。ここで、図1は材料充填装置1の断面図であり、図2は充填装置ユニット100の斜視図である。材料充填装置1は、1つの収納容器110に収納された材料Mを第1容器20に保持させて、その後、分配して複数の第2容器120に同時に充填する装置として構成される。なお、本実施の形態で適用される収納容器110は、上端が開口しており、内側面112が上端側を向く傾斜面となるように構成されている。また、収納容器110は、内側面112を水平面で切断した断面が円形となるように構成されている。
【0014】
(a)充填装置ユニット100
材料充填装置1は、充填装置ユニット100を有する。以下、充填装置ユニット100の構成を説明する。
【0015】
充填装置ユニット100は、図1に示すように、収納容器保持部10を有する。収納容器保持部10は、収納容器110を保持する役割を果たす。収納容器保持部10は、図1に示すように、収納容器110を、上端(開口)を上に向けた姿勢で保持するように構成されている。なお、収納容器保持部10は、特に図示しないが、その内部で収納容器110が空回りすることを防止するための空回り防止機構を備えた構成とすることが可能である。
【0016】
充填装置ユニット100は、図1及び図2に示すように、第1容器20を有する。第1容器20は、収納容器110に収納された材料Mを第2容器120に充填する際に、材料Mを中継する役割を果たす。すなわち、収納容器110に収納された材料Mは、第1容器20に移送されて第1容器20で保持され、その後、第2容器120に移送されることになる。なお、後で詳述するが、本実施の形態では、材料Mは、遠心力の作用によって第1容器20に保持される。また、第1容器20は、中継容器(中継部材)と称することも可能である。
【0017】
第1容器20は、収納容器110の上端を囲繞する側面22を含む。そして、充填装置ユニット100は、収納容器保持部10に収納容器110を取り付けた時に(少なくとも材料充填処理時に)、収納容器110の上端が、第1容器20の内壁面(側面22の内周面24)によって区画された区画領域A1内に配置されるように構成される。なお、本実施の形態では、第1容器20は、側面22(内周面24)の下端から張り出した下部庇部26と、側面22(内周面24)の上端から張り出した上部庇部28とを含んで構成されている。また、本実施の形態では、下部庇部26は上視図において中央が開口した形状となっており、収納容器110は、該開口を貫通する(該開口に挿通される)ように配置される。
【0018】
そして、第1容器20は、区画領域A1の周縁部(内周面24、下部庇部26及び上部庇部28によって区画された領域)で、材料Mを中継する。言い換えると、第1容器20は、区画領域A1の周縁部で、材料Mを一時的に保持することになる。
【0019】
また、本実施の形態では、第1容器20の内周面24は、鉛直方向に配置された下部領域32及び上部領域34を含む。そして、下部領域32は上部領域34側を向く傾斜面となっており、上部領域34は下部領域32側を向く傾斜面となっている。すなわち、第1容器20では、下部領域32の法線が水平方向よりも上方を向くように傾斜し、上部領域34の法線が水平方向よりも下方を向くように傾斜する。また、第1容器20は、内周面24(区画領域A1)を水平面で切断した断面が円形となるように構成されている。
【0020】
また、本実施の形態では、側面22には、第1容器20(側面22)の内側と外側(区画領域A1と第2容器120の内部空間)とを連通するための複数の貫通穴30が形成されている。なお、本実施の形態では、貫通穴30は、開口(区画領域A1側の開口)が、上部領域34に配置されるように形成されている。言い換えると、貫通穴30は、下部領域32を避けて配置される。また、本実施の形態では、貫通穴30は、開口が、上部領域34の下端部に配置されるように形成されている。言い換えると、貫通穴30は、開口が、下部領域32に隣接する位置に配置されるように形成されている。また、本実施の形態では、複数の貫通穴30は、すべて、同一水平面上に、等間隔に配置される。
【0021】
充填装置ユニット100は、図1及び図2に示すように、複数の第2容器保持部40を有する。第2容器保持部40は、第2容器120を保持する役割を果たす。第2容器保持部40は、第1容器20(側面22)よりも外側の領域で、第2容器120を保持するように構成されている。本実施の形態では、第2容器保持部40は、第2容器120の中央部を固定する中央固定部42と、第2容器120の先端部を保持する先端保持部44とを含んで構成されている。そして、この第1容器20と第2容器保持部40とを合わせて、材料移送ユニットと称することができる。
【0022】
本実施の形態では、充填装置ユニット100は、少なくとも材料Mを第2容器120に充填する工程で、収納容器保持部10、及び、第1容器20、第2容器保持部40の相対的な位置関係が変わらないように構成されている。具体的には、充填装置ユニット100は、第1の基板52を有し、収納容器保持部10は、第1の基板52に固定されている。また、充填装置ユニット100は、第1の基板52に固定された4個の支持部材54を有し、第1容器20は支持部材54に固定される。さらに、充填装置ユニット100は、支持部材54に固定された第2の基板56を有し、第2容器保持部40は第2の基板56に固定されている。これにより、充填装置ユニット100を、収納容器保持部10、及び、第1容器20、第2容器保持部40の相対的な位置関係が変わらない構成とすることができる。なお、本実施の形態では、充填装置ユニット100は、第1容器20を着脱することが可能な構成となっている。
【0023】
本実施の形態では、充填装置ユニット100は、材料中継管58をさらに含む。材料中継管58は、一端が第1容器20の貫通穴30に連通するように、第1容器20の外側面に取り付けられる。また、材料中継管58は、他端が第2容器120内に配置されるように取り付けられる。
【0024】
(b)回転駆動機構200
本実施の形態に係る材料充填装置1は、充填装置ユニット100を回転駆動する回転駆動機構200を有する。以下、回転駆動機構200の構成を説明する。
【0025】
回転駆動機構200は、充填装置ユニット100(第1の基板52)に固定された回転軸60を有する。回転軸60は、鉛直方向に延びる棒状の部材である。そして、回転軸60は、その延長線(中心線の延長線)が区画領域A1の中心を通るように、充填装置ユニット100に固定される。また、本実施の形態では、回転軸60は、ベアリング304を介して、支持体300(支持体300に固定されたベアリング保持部材302)に取り付けられている。すなわち、回転軸60は、支持体300に対して回転可能に取り付けられている。これにより、充填装置ユニット100は、第1容器20(区画領域A1)の中心を通る回転軸線を中心に回転可能な態様で、支持体300に保持されることになる。
【0026】
回転駆動機構200は、さらに、モータ70と、モータ70の動力を回転軸60に伝達する動力伝達機構80とを含む。本実施の形態では、図1に示すように、動力伝達機構80は、モータ70の軸に固定されたモータ軸プーリー82と、回転軸60に固定された回転軸プーリー84と、モータ軸プーリー82と回転軸プーリー84との間にかけ回されたベルト86とを含む。なお、本実施の形態では、モータ70として、すでに公知となっているいずれかのモータを利用することができる。例えば本実施の形態では、モータ70として、誘導モータ(インダクションモータ)を適用することができる。なお、誘導モータの回転数は、インバータから出力される交流電力の周波数を制御することにより、任意の値に設定することが可能である。ただし、モータ70として、サーボモータやPMモータを利用することも可能である。
【0027】
これにより、充填装置ユニット100を、区画領域A1の中心を通る、鉛直方向に延びる回転軸線を中心に回転させることが可能になる。
【0028】
(c)収納容器110
次に、本実施の形態に適用可能な収納容器110について説明する。収納容器110は、上端が開口しており、内側面112が上端側を向く傾斜面となるように構成されている。すなわち、収納容器110は、内側面112を水平面で切断した断面の外形が、上端に向かって大きくなるように構成されている。また、収納容器110は、内側面112を水平面で切断した断面が円形となるように構成されている。
【0029】
なお、収納容器110として、上端の開口をふさぐ蓋体を着脱することが可能な容器を適用することもできる。かかる構成とすることで、収納容器110を材料充填装置1(収納容器保持部10)に取り付ける直前まで収納容器110内を気密に保持することができるため、不純物の混入を防止することができる。
【0030】
(d)第2容器120
本実施の形態に適用可能な第2容器120は、特に限定されるものではない。すなわち、第2容器120は、所望の態様で材料を保持することが可能に構成されたいずれかの部材を利用することができる。例えば、第2容器120として、シリンジ容器を利用することができる。あるいは、第2容器120として、金型や、内部空間に液晶が充填される液晶パネル用容器を適用することができる。また、第2容器120として、上端部にキャップが取り付けられたものを利用することも可能である(図示せず)
【0031】
なお、第2容器120は、第2容器保持部40に保持される。そのため、第2容器120は、第1容器20に対して固定され、第1容器20と第2容器120とは一体的に動作することになる。
【0032】
(e)減圧手段
本実施の形態に係る材料充填装置1は、さらに、充填装置ユニット100を格納する気密性のチャンバ92と、チャンバ92内を減圧する減圧手段94とを含む。本実施の形態では、支持体300の横板310上に、チャンバ92が配置される。また、ベアリング保持部材302と回転軸60との間に磁性流体を配置することにより、チャンバ92内を気密に保持することが可能になる。減圧手段94は、減圧ポンプや配管、各種のバルブによって実現することができる。また、本実施の形態に係る材料充填装置1は、チャンバ92内の気圧を測定するためのセンサ96(圧力センサ)を有する構成となっている。
【0033】
(f)制御手段
本実施の形態に係る材料充填装置1は、制御手段210を含む。制御手段210は、材料充填装置1の動作を統括制御する役割を果たす。制御手段210は、回転駆動機構200を制御して充填装置ユニット100の回転速度を調整する。制御手段210は、また、チャンバ92内の気圧(真空圧)を制御する。制御手段210は、材料充填装置1をシーケンス制御するように構成することができる。以下、制御手段210について説明する。図3は、制御手段210について説明するための図である。
【0034】
制御手段210は、マイクロプロセッサ(CPU212)と、回転駆動機構200を制御する回転速度制御部214と、チャンバ92内の真空圧(気圧)を制御する真空圧制御部216とを含む。そして、CPU212は、所定のタイミングで回転速度制御部214及び真空圧制御部216に各種の信号を出力することにより、材料充填装置1の動作を制御する。
【0035】
本実施の形態では、回転速度制御部214は、モータ70の回転数を制御するモータ制御部218を含む。例えばモータ70としてインダクションモータを採用する場合には、モータ制御部218は、インバータの動作を制御し、モータ70に供給される交流電力の周波数を所定値とするためのインバータ制御部によって実現することができる。あるいは、モータ70としてサーボモータを採用する場合には、モータ制御部218は、専用のドライバ及びハードウェアによって実現され、モータ70を所望の回転数で動作させるための各種処理を行う。
【0036】
真空圧制御部216は、減圧ポンプの動作を制御するポンプ制御部と、減圧手段94に含まれる各種弁の開閉を切り替えるスイッチング素子によって実現することができる。なお、真空圧制御部216は、センサ96が検出したチャンバ92内の圧力情報に基づいて、減圧ポンプの動作を制御するように構成することが可能である。
【0037】
そして、CPU212は、所定のタイミングで、回転速度制御部214及び真空圧制御部216に各種の信号(充填装置ユニット100の回転速度データや真空圧データ等)を送信する処理を行う。これにより、充填装置ユニット100を所定の速度(角速度・回転数)で回転させることができ、かつ、チャンバ92内を所望の真空圧に設定することができる。
【0038】
また、CPU212は、操作部224から入力された動作データ(充填装置ユニット100の回転速度データや真空圧データ、運転時間データ等)を受け付けて、図示しない記憶部に格納する処理や、表示部226に各種情報(操作部224から入力された動作データや、充填装置ユニット100の回転速度、チャンバ92内の真空圧、経過時間等)を表示させるための処理を行う。
【0039】
(2)材料充填装置1の動作
次に、本実施の形態に係る材料充填装置1の動作について、図4〜図8を参照して説明する。
【0040】
材料充填装置1を動作させる準備として、図4に示すように、材料Mが収納された収納容器110を収納容器保持部10に保持させ、第2容器120を第2容器保持部40に保持させて、かつ、貫通穴30を介して第1容器20の区画領域A1と第2容器120とを連通させる。
【0041】
そして、回転駆動機構200の駆動を開始することによって充填装置ユニット100(材料移送ユニット)を回転させる。充填装置ユニット100が回転すると、材料Mには遠心力が作用し、材料Mは収納容器110の内側面112に押し付けられる。ここで、内側面112は収納容器110の上端側を向く傾斜面となっているため、材料Mは、内側面112に押し付けられると、内側面112に沿って収納容器110の上端に向かう力が作用することになる。すなわち、材料Mは、図5に示すように、内側面112に沿って薄く拡がりながら(パイプ形状となりながら)、内側面112に沿って上端に向かって移動する。そして、本実施の形態では、収納容器110の上端が開口しているため、材料Mは、上端の開口を通して収納容器110から排出される。
【0042】
ところで、充填装置ユニット100は、第1容器20の側面22が、収納容器110の上端(開口)を囲繞するように構成されている。言い換えると、充填装置ユニット100では、収納容器110の上端(開口)が、区画領域A1内に配置される。また、第1容器20も回転しているため、第1容器20内でも、材料Mは遠心力の影響を受けて、区画領域A1の周縁部(内周面24)に押し付けられる。このことから、収納容器110の上端の開口から排出された材料Mは、第1容器20に移送され、図6に示すように、区画領域A1の周縁部に保持されることになる。
【0043】
そして、第1容器20に移送された材料Mは、第1容器20内で遠心力を受けて下部領域32に押し付けられると、下部領域32の表面を、上方(上部領域34/下部領域32及び上部領域34の境界領域33)に向かって移動する。ところで、第1容器20には、開口が上部領域34に配置されるように、貫通穴30が形成されている。そのため、材料Mは、第1容器20に移送されて下部領域32を上部領域34に向かって移動し、図6に示すように、貫通穴30(開口)に接触する前に、境界領域33に至ることになる。そして、第1容器20では、上部領域34は下部領域32を向く傾斜面となっていることから、材料Mは、境界領域33に至ると上方への推進力を失って第1容器20の周方向へ拡がり、境界領域33を満たすことになる。そしてこの過程で、第1容器20内で、材料Mの高さが、周方向に一定となる。言い換えると、材料Mは、第1容器20内で、充填装置ユニット100の回転軸線を中心とする点対称形となる。
【0044】
充填装置ユニット100をさらに回転させると、第1容器20に移送されて境界領域33に向かう材料Mの量が増し、それに伴って材料Mが上方向に拡がるため、図7に示すように、材料Mは貫通穴30(開口)に接触する。そして、材料Mは、貫通穴30(材料中継管58)から排出されることになる。ここで、本実施の形態では、充填装置ユニット100は、貫通穴30を介して区画領域A1と第2容器120の内部空間が連通されている。そのため、貫通穴30から排出された材料は、図8に示すように、第2容器120の内部空間に移送されることになる。
【0045】
すなわち、本実施の形態に係る材料充填装置1では、遠心力を利用して、収納容器110に収納された材料Mを第1容器20の区画領域A1の周縁部に移送し、さらに、貫通穴30(材料中継管58)を介して第2容器120に移送することにより、収納容器110に収納された材料Mを第2容器120に充填する。
【0046】
また、この材料充填装置1は、上端が開口しており、内側面が上端側を向く傾斜面となっている収納容器110に収納された材料Mを、複数の第2容器120に充填する材料充填装置であって、
上端を上に向けた姿勢で収納容器110を保持する収納容器保持部10と、上端を囲繞する側面22を有し、内周面24によって区画された区画領域A1の周縁部で材料Mを中継する第1容器20と、第1容器20よりも外側の領域で複数の第2容器120を保持する第2容器保持部40とを有する充填装置ユニット100と、
充填装置ユニット100を、区画領域A1の中心を通り、鉛直方向に延びる回転軸線を中心に回転させる回転駆動機構200と、
を含み、
第1容器20の側面には、貫通穴30が形成されており、
第1容器20の内壁面24は、鉛直方向に配列された下部領域32及び上部領域34を有し、
下部領域32は、上部領域34側を向く傾斜面となっており、
上部領域34は、下部領域32側を向く傾斜面となっており、
複数の貫通穴30は、開口が上部領域34に配置されるように形成されている材料充填装置であるといえる。
【0047】
また、材料充填装置1は、チャンバ92と、チャンバ92内を減圧する減圧手段94とを含んで構成されている。そのため、収納容器110に収納された材料Mを第2容器120に充填する工程を、チャンバ92内を減圧した状態で行うことが可能である。具体的には、収納容器110及び第2容器120を充填装置ユニット100に保持させた後にチャンバ92内を減圧し、その後、モータ70を駆動させることにより、減圧環境下で、材料Mの充填処理を行うことが可能になる。
【0048】
(3)材料充填方法
次に、本実施の形態に係る材料充填方法について、図9のフローチャート図を参照して説明する。
【0049】
本実施の形態に係る材料充填方法は、図9に示すように、充填装置ユニット100に材料Mが収納された収納容器110及び第2容器120を保持させる(収納容器保持部10に収納容器110を保持させ、第2容器保持部40に第2容器120を保持させる)工程(ステップS110)と、充填装置ユニット100(材料移送ユニット)を回転させて、材料Mを第2容器120に充填する工程(ステップS120)とを含む。なお、充填装置ユニット100の回転数や回転時間は、材料Mを第2容器120に充填する処理に必要な値であれば足り、その具体的な数値は実験により導出することができる。
【0050】
(4)材料M
本実施の形態に適用可能な材料Mは、流体として挙動するものであればよく、その組成や用途は特に限定されるものではない。材料Mとして、例えば、接着剤、シーラント剤、液晶材料、半田ペースト、成型に利用される硬化性の樹脂材料、歯科用印象材料、歯科用セメント(穴埋め剤等)、粘性の強い液状の薬剤や、粒状体等の種々の材料を適用することができる。
【0051】
(5)効果
以下、本実施の形態が奏する作用効果について説明する。
【0052】
材料充填装置1によると、遠心力を利用して、収納容器110に収納された材料Mを第2容器120に充填する。そのため、材料Mに大きな力を作用させることが可能になるため、粘度の高い材料であっても、効率よく第2容器120に充填(移送)することができる。また、材料Mに大きな力を作用させることから、収納容器110及び第1容器20に残る材料の量を極めて少なくすることができ、材料Mの効率的な利用が可能になる。
【0053】
また、材料充填装置1によると、材料充填処理を、すべて、遠心力を利用して実現することができる。そのため、材料充填時に、ヘラなどの部材を利用する必要がなくなるため、材料に不純物が混入しないように材料充填処理を行うことが可能になる。
【0054】
また、材料充填装置1によると、材料充填処理時に、第1及び第2容器110,120以外では、第1容器20(第1容器20及び材料中継管58)のみに材料Mが接触することになる。そのため、洗浄を要する部品の点数を少なくすることができる。
【0055】
また、材料充填装置1によると、収納容器110は、内側面112が上端側を向く傾斜面となっており、かつ、収納容器保持部10に保持されたときに上端(開口)が第1容器20の区画領域A1内に配置することが可能に構成されていればよく、その形状は限定されるものではない。そのため、種々の容器(収納容器110)に対応することが可能な材料充填装置を提供することができる。また、材料充填装置1によると、材料Mは、第1容器20から第2容器120に移送される。そのため、収納容器110は材料Mを第1容器20に移送することが可能に構成されていれば足り、厳密な加工精度が要請されるものではない。
【0056】
また、材料充填装置1によると、材料Mが収納容器110から排出される際に、材料Mは、薄く拡がった状態となって、内側面112に沿って上端(開口)に向かって移動する(図5参照)。すなわち、材料Mは、厚みが小さい状態で遠心力を受けることになる。そのため、材料Mに混入した気泡がある場合でも、遠心力の作用により気泡を放出させることができるため、材料充填工程で材料Mを脱泡処理することが可能になる。
【0057】
なお、本実施の形態では、材料充填装置1は、チャンバ92及び減圧手段94を有する。そのため、材料充填処理時に、材料Mに混入した気泡を効率よく放出させることができる。
【0058】
さらに、本実施の形態では、第1容器20(側面22)に複数の貫通穴30が形成されており、該複数の貫通穴30を介して、区画領域A1と複数の第2容器120の内部空間とが連通されている。そのため、収納容器110に収納された材料Mを、複数の第2容器120に分配して同時に充填することが可能な、効率のよい材料充填装置を提供することができる。なお、第1容器20が、内周面24の水平断面が円形となるように構成されている場合、第1容器20の中心と各貫通穴30との距離が等しくなるため、複数の貫通穴30近傍では、材料Mには同じ大きさの力がかかることになる。そのため、複数の貫通穴30のそれぞれから、同量の材料Mを排出させることができ、複数の第2容器120に、均等に材料Mを充填させることができる。
【0059】
そして、先に説明したように、本実施の形態では、第1容器20には、開口が上部領域34に配置されるように貫通穴30が形成されており、第1容器20に移送された材料Mは、下部領域32及び上部領域34の境界領域33に至ると、高さのばらつきが小さくなる。また、材料充填装置1によると、その後も、第1容器20内での高さが大きくばらつかないように、材料Mを上方(貫通穴30)に向けて拡げることができる。そのため、材料Mを第2容器120に移送する処理の開始時において、材料Mを、すべての貫通穴30に(ほぼ)同時に接触させることができる。このことから、すべての第2容器120への材料Mの移送が、(ほぼ)同時に開始されることになり、それぞれの第2容器120に充填される材料Mの量のばらつきを軽減することが可能になる。
【0060】
特に、本実施の形態によると、収納容器110内に材料Mが偏在している場合であっても、材料Mを複数の第2容器120に均等に分配充填する処理を、短時間に行うことが可能になる。そのため、いわゆる自転・公転方式の攪拌脱泡装置で処理された材料であっても、複数の第2容器120に均等に分配充填することができる。詳しくは、現在主流となっている自転・公転方式の攪拌脱泡装置として、図10(A)に示すように、材料Mが収納された収納容器800を、鉛直に延びる公転軸線L1を中心に公転させながら、公転軸線L1と斜めに交差する自転軸線L2を中心に自転させるように構成されている装置が知られている。この装置では材料Mに高い遠心力が作用するため、材料Mは、公転軸線L1から最も遠い領域に集められ、収納容器800内で材料が偏在することになる。そして、材料Mの粘度が高い場合には、攪拌脱泡装置から収納容器800を取り出した後であっても材料Mが大きく流動しないため、図10(B)に示すように、収納容器800内で材料が偏在した状態が維持されることがある。
【0061】
ところで本実施の形態によると、第1容器20内で、材料Mの高さのばらつきを小さくすることができる。そのため、収納容器110に収納された材料Mを、自転・公転方式の攪拌脱泡装置で処理した後に、直ちに材料Mの充填処理(充填装置ユニット100の回転駆動)を開始させる場合であっても、材料Mを複数の第2容器120に均等に分配充填することが可能になる。なお、図10(A)及び図10(B)に示す例では、収納容器800には蓋体が取り付けられており、これにより攪拌脱泡中に材料Mが漏れることを防止することができる。また、蓋体の中央に貫通穴が形成されていることから、減圧雰囲気中で収納容器800を自転・公転させれば、収納容器800の内部が減圧された状態で材料Mの攪拌脱泡処理を行うことが可能になるため、高い脱泡性能を実現することができる。
【0062】
(6)変形例
次に、本実施の形態に係る材料充填装置の変形例について説明する。図11は、本変形例に係る材料充填装置の構成について説明するための図である。
【0063】
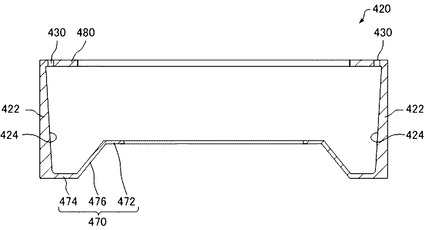
本変形例では、材料充填装置は、第1容器20にかえて、図11に示す第1容器420を含む。以下、第1容器420の構成について説明する。
【0064】
第1容器420は、側面422を有する。そして、側面422の内周面424は、後述する上面480側を向く傾斜面となっている。言い換えると、側面422は、内周面424の水平断面の外形が、鉛直上方に向かって大きくなるように構成されている。あるいは、側面422は、内周面424の法線が水平面よりも上方を向くように傾斜しているといえる。
【0065】
第1容器420は、底面470を有する。底面470は、側面422(内周面424)の下端に延設されている。底面470は、中央部472と、周縁部474と、中央部472及び周縁部474をつなぐ延設部476とを有する。なお、第1容器420では、周縁部474(側面422の下端部)は、中央部472よりも鉛直下方に配置される。そして、延設部476は、周縁部474に近づくほど高さが低くなるように傾斜している。
【0066】
第1容器420は、上面480を有する。上面480は、側面422(内周面424)の上端に延設される庇状の部材である。そして、本変形例では、上面480の周縁部には、複数の貫通穴430が形成されている。
【0067】
この第1容器420を利用した場合でも、材料Mを第2容器120に移送する処理の開始時において、材料Mを、すべての貫通穴30に(ほぼ)同時に接触させることができる。このことから、すべての第2容器120への材料Mの移送が、(ほぼ)同時に開始されることになり、それぞれの第2容器120に充填される材料Mの量のばらつきを軽減することが可能になる。
【0068】
また、第1容器420の底面470は、傾斜する延設部476を有する。そのため、材料充填処理時に第1容器420内に多量の材料Mが残った場合であっても、材料Mが第1容器420からこぼれ出ることを防止することが可能になる。
【符号の説明】
【0069】
1…材料充填装置、 10…収納容器保持部、 20…第1容器、 22…側面、 24…内壁面、 26…下部庇部、 28…上部庇部、 30…貫通穴、 32…下部領域、 33…境界領域、 34…上部領域、 40…第2容器保持部、 42…中央固定部、 44…先端保持部、 52…第1の基板、 54…支持部材、 56…第2の基板、 58…材料中継管、 60…回転軸、 70…モータ、 80…動力伝達機構、 82…モータ軸プーリー、 84…回転軸プーリー、 86…ベルト、 92…チャンバ、 94…減圧手段、 96…センサ、 100…充填装置ユニット、 110…収納容器、 112…内側面、 120…第2容器、 200…回転駆動機構、 210…制御手段、 214…回転速度制御部、 216…真空圧制御部、 218…モータ制御部、 224…操作部、 226…表示部、 300…支持体、 302…ベアリング保持部材、 304…ベアリング、 420…第1容器、 422…側面、 424…内周面、 430…貫通穴、 470…底面、 472…中央部、 474…周縁部、 476…延設部、 480…上面、 800…収納容器、 A1…区画領域、 M…材料
【特許請求の範囲】
【請求項1】
第1容器に保持された材料を複数の第2容器に充填する材料充填装置であって、
側面に複数の貫通穴が形成された第1容器と、前記第1容器の外側の領域で複数の第2容器を保持する第2容器保持部とを有する材料移送ユニットと、
前記材料移送ユニットを前記第1容器の内側を通る所定の回転軸線を中心に回転させて、前記第1容器に保持された材料に前記側面に向く遠心力を作用させ、前記材料を、前記複数の貫通穴を介して前記複数の第2容器に移送させる回転駆動機構と、
を含み、
前記第1容器の内壁面は、鉛直方向に配列された下部領域及び上部領域を有し、
前記下部領域は、前記上部領域側を向く傾斜面となっており、
前記上部領域は、前記下部領域側を向く傾斜面となっており、
前記複数の貫通穴は、開口が前記上部領域に配置されるように形成されている材料充填装置。
【請求項2】
請求項1に記載の材料充填装置において、
前記複数の貫通穴は、開口が前記下部領域に隣接した位置に配置されるように形成されている材料充填装置。
【請求項3】
請求項1に記載の材料充填装置において、
前記第1容器保持部と、前記中継部材及び前記第2容器保持部とが同じ回転数で回転するように構成されている材料充填装置。
【請求項1】
第1容器に保持された材料を複数の第2容器に充填する材料充填装置であって、
側面に複数の貫通穴が形成された第1容器と、前記第1容器の外側の領域で複数の第2容器を保持する第2容器保持部とを有する材料移送ユニットと、
前記材料移送ユニットを前記第1容器の内側を通る所定の回転軸線を中心に回転させて、前記第1容器に保持された材料に前記側面に向く遠心力を作用させ、前記材料を、前記複数の貫通穴を介して前記複数の第2容器に移送させる回転駆動機構と、
を含み、
前記第1容器の内壁面は、鉛直方向に配列された下部領域及び上部領域を有し、
前記下部領域は、前記上部領域側を向く傾斜面となっており、
前記上部領域は、前記下部領域側を向く傾斜面となっており、
前記複数の貫通穴は、開口が前記上部領域に配置されるように形成されている材料充填装置。
【請求項2】
請求項1に記載の材料充填装置において、
前記複数の貫通穴は、開口が前記下部領域に隣接した位置に配置されるように形成されている材料充填装置。
【請求項3】
請求項1に記載の材料充填装置において、
前記第1容器保持部と、前記中継部材及び前記第2容器保持部とが同じ回転数で回転するように構成されている材料充填装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−173677(P2010−173677A)
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願番号】特願2009−17068(P2009−17068)
【出願日】平成21年1月28日(2009.1.28)
【出願人】(393030408)株式会社シンキー (34)
【Fターム(参考)】
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願日】平成21年1月28日(2009.1.28)
【出願人】(393030408)株式会社シンキー (34)
【Fターム(参考)】
[ Back to top ]