
材料加工方法および装置
【課題】居住可能な建造物の表面を加工する。
【解決手段】レーザの基本ユニットは、レーザ発生器310と、レーザ発生器310に結合されたレーザヘッド200とを含む。レーザヘッド200は、気体格納器240を含み、当該気体格納器は、材料を閉じ込め相互作用領域から除去する。気体格納器240は、ゴム製シールを含み、当該シールは、建造物と接触し、相互作用領域を実質的に取り囲むので、材料の閉じ込めおよび相互作用領域からの除去が促進され、建造物内における活動に対する妨害が減少する。本装置は、固定用メカニズム110をさらに含み、この固定用メカニズムは、建造物に取り外し可能に結合され、レーザヘッド200に取り外し可能に結合される。本装置は、レーザの基本ユニットに電気的に接続された制御器500をさらに含む。制御器は、使用者の入力に応答してレーザの基本ユニット300に制御信号を送信する。
【解決手段】レーザの基本ユニットは、レーザ発生器310と、レーザ発生器310に結合されたレーザヘッド200とを含む。レーザヘッド200は、気体格納器240を含み、当該気体格納器は、材料を閉じ込め相互作用領域から除去する。気体格納器240は、ゴム製シールを含み、当該シールは、建造物と接触し、相互作用領域を実質的に取り囲むので、材料の閉じ込めおよび相互作用領域からの除去が促進され、建造物内における活動に対する妨害が減少する。本装置は、固定用メカニズム110をさらに含み、この固定用メカニズムは、建造物に取り外し可能に結合され、レーザヘッド200に取り外し可能に結合される。本装置は、レーザの基本ユニットに電気的に接続された制御器500をさらに含む。制御器は、使用者の入力に応答してレーザの基本ユニット300に制御信号を送信する。
【発明の詳細な説明】
【技術分野】
【0001】
優先権主張
本願は、2004年3月18日出願の米国特許出願第10/803,272号からの一部継続出願であって、当該米国特許出願は、2003年10月22日付出願の米国特許出願第10/690,983号の一部継続出願であり、当該出願は、2003年3月18日出願の米国仮特許出願第60/456,043号、2003年5月16日出願の米国仮特許出願第60/471,057号、2003年8月20日出願の米国仮特許出願第60/496,460号に対して、35U.S.C.§119(e)に基づく利益を主張しており、それらの各出願明細書は、参照によってその全体がここに組み込まれる。本願は、2004年8月16日出願の米国仮特許出願第60/601,816号に対して35U.S.C.§119(e)に基づく利益も主張し、当該出願明細書は、参照によってその全体がここに組み込まれる。
【0002】
関連出願
本願は、米国特許出願第10/690,833号、第10/690,975号、第10/691,481号および第10/691,444号に関連しており、それらの各出願は、2003年10月22日に出願されており、参照によってその全体がここに組み込まれる。本願はまた、米国特許出願第10/803,243号および第10/803,267号にも関連しており、それらの両方は、2004年3月18日付で出願されており、参照によって全体がここに組み込まれる。
【0003】
連邦政府による資金提供を受けた研究開発の記載
本発明は、ロバート・T・スタッフォード災害救助・緊急事態援助法(42U.S.C.§5121以下を参照)の一部として連邦緊急事態管理局から部分的に資金提供を受けた。
【0004】
発明の背景
発明の分野
本発明は材料を加工する分野、特に、エネルギー波を使用して材料を穴明け、切削、および表面加工するための装置および方法に関する。
【背景技術】
【0005】
広範囲の材料加工産業従事者は長い間、非破壊の材料加工の必要性を認識してきた。過去に、穴明け、切削、荒仕上げなどを含めた事実上すべての材料加工は数多くの破壊的な態様(例えば騒音、振動、粉塵、蒸気、および噴煙)を有してきた。材料加工は該して、穴明け、槌打ち、およびその他の動力の補助による方法のような機械的技術、およびウォータージェットに基づいた技術を含む。材料加工の課題の例証である米国特許第5,085,026号は極めて具体的に示している。026’の装置はコンクリートまたは他の石造建造物のような材料の機械による穴明けを必要とし、上記で言及したすべての破壊的態様を生じさせる。
【特許文献1】米国特許第5,085,026号
【発明の開示】
【課題を解決するための手段】
【0006】
ある実施形態では、装置が、居住可能な建造物の表面を加工する。本装置は、レーザの基本ユニットを備え、当該ユニットは、相互作用領域にレーザ光を供給するように適合されており、レーザ光が、建造物から材料を取り除く。レーザの基本ユニットは、レーザ発
生器と、当該レーザ発生器に結合されるレーザヘッドとを備える。レーザヘッドは、相互作用領域から材料を除去するように適合され、それにより、建造物内における活動に対する妨害が少なくなり得る。本装置は、レーザ操作システムをさらに備える。レーザ操作システムは、建造物に取り外し可能に結合されるように適合された固定用メカニズムを備える。レーザ操作システムは、固定用メカニズムに結合されかつレーザヘッドに結合される位置決めメカニズムをさらに備える。レーザ操作システムは、建造物に対するレーザヘッドの位置を制御可能に調節するように適合される。本装置は、レーザの基本ユニットおよびレーザ操作システムに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答してレーザの基本ユニットおよびレーザ操作システムに制御信号を送信するように適合されている。
【0007】
或る実施形態では、装置が、居住可能な建造物内における活動に対する妨害を減少させて建造物の表面を加工する。本装置は、レーザ光発生手段を備える。本装置は、建造物から材料を除去するように、レーザ光を建造物の相互作用領域に供給するための手段をさらに備える。本装置は、材料を閉じ込めて相互作用領域から除去するための手段をさらに備える。本装置は、建造物の表面に対する相互作用領域の位置を制御可能に調節する手段をさらに備える。本装置は、使用者の入力に応答してレーザ光および相互作用領域の位置を制御するための手段をさらに備える。
【0008】
ある実施形態では、居住可能な建造物の表面加工方法を、建造物内における活動に対する妨害を減少させて行う。本方法は、遠隔操作でレーザ光発生を行うステップを含む。本方法は、レーザ光が相互作用領域の建造物と相互作用して建造物から材料を除去するように、レーザ光を表面に供給するステップをさらに含む。本方法は、材料を閉じ込め相互作用領域から除去するステップをさらに含む。本方法は、建造物の表面に対する相互作用領域の位置を制御可能に調節するステップをさらに含む。本方法は、使用者の入力に応答して、レーザ光と、相互作用領域の位置とを制御するステップをさらに含む。
【0009】
ある実施形態では、装置が、居住可能な建造物の表面の加工を行う。本装置は、エネルギー波を相互作用領域に供給するように適合された基本ユニットを備え、当該エネルギー波が建造物から材料を除去する。基本ユニットは、発生器、および発生器に結合されるヘッドを備える。ヘッドは、相互作用領域から材料を除去するように適合され、それにより、建造物内における活動に対する妨害が減少する。本装置は、操作システムをさらに備える。操作システムは、建造物に取り外し可能に結合されるように適合された固定用メカニズムを備える。操作システムは、固定用メカニズムに結合されかつヘッドに結合される位置決めメカニズムをさらに備える。操作システムは、建造物に対するヘッドの位置を制御可能に調節するように適合される。本装置は、基本ユニットおよび操作システムに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答して制御信号を基本ユニットに送信するように適合される。
【0010】
ある実施形態では、装置が、居住可能な建造物の表面の加工を行う。本装置は、レーザ光を相互作用領域に供給するように適合されたレーザ基本ユニットを備え、当該レーザ光が、建造物から材料を除去する。レーザ基本ユニットは、レーザ発生器と、レーザ発生器に結合されるレーザヘッドとを備える。レーザヘッドは、相互作用領域から材料を除去するように適合され、それにより、建造物内における活動に対する妨害が減少し得る。本装置は、建造物に取り外し可能に結合されかつレーザヘッドに取り外し可能に結合されるように適合された固定用メカニズムをさらに備える。本装置は、レーザ基本ユニットに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答して制御信号をレーザ基本ユニットに送信するように適合される。
【0011】
ある実施形態では、装置で、居住可能な建造物内における活動に対する妨害を減少させ
て、建造物の表面加工を行う。本装置は、レーザ光発生手段を備える。本装置は、建造物から材料を除去するようにレーザ光を表面に供給する手段をさらに含む。本装置は、材料を閉じ込め相互作用領域から除去する手段をさらに含む。本装置は、使用者の入力に応答して、レーザ光を制御する手段をさらに含む。
【0012】
ある実施形態では、居住可能な建造物の表面加工方法を、建造物内における活動に対する妨害を減少させて行う。本方法は、遠隔操作でレーザ光発生を行うステップを含む。本方法は、レーザ光が相互作用領域の建造物と相互作用して建造物から材料を除去するように、レーザ光を表面に供給するステップをさらに含む。本方法は、材料を閉じ込め相互作用領域から除去するステップをさらに含む。本方法は、使用者の入力に応答して、レーザ光を制御するステップをさらに含む。
【0013】
ある実施形態では、装置が、居住可能な建造物の表面の加工を行う。本装置は、エネルギー波を相互作用領域に供給するように適合された基本ユニットを備え、当該エネルギー波が建造物から材料を除去する。基本ユニットは、発生器、および発生器に結合されるヘッドを備える。ヘッドは、相互作用領域から材料を除去するように適合され、それにより、建造物内における活動に対する妨害が減少し得る。本装置は、建造物に取り外し可能に結合されるように適合されかつヘッドに取り外し可能に結合される固定用メカニズムをさらに備える。本装置は、基本ユニットに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答して制御信号を基本ユニットに送信するように適合される。
【0014】
ある実施形態では、装置が、居住可能な建造物の表面の加工を行う。本装置は、レーザ光を相互作用領域に照射するレーザ基本ユニットを備え、当該レーザ光が、建造物から材料を除去する。レーザ基本ユニットは、レーザ発生器と、レーザ発生器に結合されるレーザヘッドとを備える。レーザヘッドは、材料を閉じ込め相互作用領域から除去する気体格納器を備える。気体格納器は、ゴム製シールを含み、当該シールは、建造物と接触し実質的に相互作用領域を囲むので、材料の閉じ込めおよび相互作用領域からの除去が促進され、建造物内における活動に対する妨害が少なくなり得る。本装置は、建造物に取り外し可能に結合されかつレーザヘッドに取り外し可能に結合される固定用メカニズムをさらに備える。本装置は、レーザ基本ユニットに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答して制御信号をレーザ基本ユニットに送信する。
【0015】
或る実施形態では、装置が、居住可能な建造物内における活動に対する妨害を減少させて建造物の表面を加工する。本装置は、レーザ光発生手段を備える。本装置は、建造物から材料を除去するように、レーザ光を建造物の相互作用領域に供給するための手段をさらに備える。本装置は、材料を閉じ込めて相互作用領域から除去するための手段をさらに備える。閉じ込め手段は、相互作用領域を実質的に取り囲むゴム製シールを含む。本装置は、使用者の入力に応答してレーザ光を制御する手段をさらに備える。
【0016】
ある実施形態では、居住可能な建造物の表面加工方法を、建造物内における活動に対する妨害を減少させて行う。本方法は、遠隔操作でレーザ光発生を行うステップを含む。本方法は、レーザ光が相互作用領域の建造物と相互作用して建造物から材料を除去するように、レーザ光を表面に供給するステップをさらに含む。本方法は、材料を閉じ込め相互作用領域から除去するステップをさらに含む。材料は、相互作用領域を実質的に取り囲むゴム製シールにより閉じ込められる。本方法は、使用者の入力に応答して、レーザ光を制御するステップをさらに含む。
【0017】
本発明の概要を説明するために、本発明のある態様、利点、および新規な特徴を上に述べてきた。しかしながら、本発明の特定の実施形態によって、必ずしも全てのこのような利点が得られる訳ではないことが、理解される。したがって、本明細書に教示または示唆
した他の利点を必ずしも得られなくても、本明細書に教示した1つの利点または利点群を得られるかまたは最適化するように、本発明を実施または実行し得る。
【発明を実施するための最良の形態】
【0018】
権利主張される本発明の範囲を限定することなく、ここで図面および図表を参照する。
【0019】
材料加工の破壊的態様を削減することは長い間、材料加工産業、特に改築に共通するような居住中の建造物またはその近くでの材料加工を必要とする産業および多くの他の用途での従事者の目標であった。そのような長い間の切実な要求は、建造物の安全性を高めるために居住中の建造物を改装する効果的で経済的な手段に関して差し迫った必要性のある地球の地震活動地域で広く行き渡ってきた。
【0020】
先行技術は破壊的特徴による問題を抱えており、それにより、それらを居住中の建造物の改装に関して事実上不適切なものにする。付け加えると、そのような材料加工技術はしばしば危険で費用のかさむ「切り抜き」の危険性を呈する。「切り抜き」の危険性は、作業者が題材の材料をドリルで穴明けしているとき、中に埋め込まれている物体を不本意に切るといった事例を含む。例えば、既にあるコンクリートの壁に穴明けしている建築作業者が偶然に補強用スチールもしくは鉄筋、あるいは通電中の電線用導管もしくは導線といった埋め込まれたユーティリティに出くわすことがあり得る。そのような事故は結果として工具もしくは対象材料の高額の損傷、ならびに作業者にとってあり得る致命的な結末(例えば感電死)につながる可能性がある。従来式の穴明け法はまた、穴明けされる材料を予期せず突き抜き、建造物もしくは材料の反対側にいる作業者に損傷を与える「突き抜き」の危険性も含み得る。
【0021】
付け加えると、従来式の材料加工器具は操作することが極めて厄介であった。手持ち式の動力穴明け装置もしくは槌打ち装置は普通では50ポンドを超える重さがあり、しばしば長時間について作業者によって頭上で保持されることを要求される。従来式の装置はまた、通常では作業者が装置を保持しているときに吸収しなければならない振動力も発生する。潜在的に有害な振動力、持続する重量物持ち上げ、および「突き抜き」の危険性に加えて、作業者と装置の近くの人々は落下するかまたは飛び出す破片、ならびに粉塵、噴煙、蒸気、振動、および騒音に晒される可能性がある。不快な活性のこのレベルは該して居住中の建造物にとって不適切であり、騒音と振動が完全に受容不可能となり得る病院、研究室などとして使用される建造物にとって全く不適切である。
【0022】
必要とされ続けているが当該技術分野で欠落しているものは上記で例示された欠点を克服する非破壊的加工技術である。本願明細書で述べられる或る実施形態では、そのような欠点のいくつか、またはすべてを克服するために加工される表面にエネルギー波が向けられる。或る実施形態のエネルギー波は電磁波(例えばレーザ光、マイクロ波)であり、その一方で他の実施形態ではそれらは音波(例えば超音波)である。しかしながら、或る実施形態では、そのような切削ユニットは嵩張る可能性が高く、かつしばしば機械的相手方として操作することが難しい。レーザがコンクリートを切り抜くまたは突き抜く速度は、コンクリート中の骨材のタイプ、大きさ、集中度により異なり得る。付け加えると、レーザは上述されたような同じ「切り抜き」の危険性に陥りやすく、加工される材料のマトリクスの中に隠された物体が不注意で傷つけられる可能性が高い。レーザはまた、レーザビームの経路にある個人もしくは物体への危険性を伴う追加的な「突き抜き」の危険も引き起こしかねない。レーザはまた、穴あけされた材料を切削もしくは穴明けされた穴から取り除く処理に複雑さを呈する可能性が高い。或る実施形態では、レーザシステムは携帯型加工用ヘッドと連絡する遠隔レーザ発生器を組み入れ、それが多くの非破壊的でかつ安全性の特徴を組み入れることでシステムが居住中の建造物の内部または近辺で利用されることを可能にする。
【0023】
本発明の或る実施形態は先行技術の短所の多くに対処し、かつこれまで入手不可能であった恩典(例えば建造物内部での活動に対する減少した破壊性)を可能にしながらその一方で高速の材料加工を提供する。或る実施形態では、本方法および装置は騒音を発生し、嵩張り、かつ重い要素が実際の作業領域から大きく離れて動作することが可能となるように要素間のファイバ接続を利用する。或る実施形態は動作中の騒音と振動の両方で低く、かつ粉塵および破片を効率的に除去する。或る実施形態は「切り抜き」または「突き抜き」の危険を削減するための検出システムを有する。或る実施形態は材料加工時に作業者が作業領域から遠くに位置することを可能にすることによって作業者の安全を促進する。或る実施形態は人間が持ち運び可能な複数の部分品(例えば50ポンド未満)へと分離可能であり、加工される建造物の近辺もしくは中の場所への輸送を、容易かつ迅速な輸送性および据え付けを提供することによって容易にする。
【0024】
本発明の或る実施形態は、従来式の加工技術によって破壊される可能性のある壊れ易い建造物を加工するための方法および装置を提供する。例えば、改装もしくは改修加工の一部としてコンクリートの穀物貯蔵用サイロを加工するための従来式の鋸を使用する工程は結果として振動につながり、サイロの他の部分を傷つける可能性が高い。壊れ易い建造物を加工するためにレーザを使用する工程は加工中に建造物に為される横で生じる損傷を削減することが可能である。さらに、本願明細書で述べられる或る実施形態は容易に組み立て/解体され、それゆえに、それ以外の方法ではアクセス不可能な建造物の部分でそれらが使用されることが可能である。本願明細書に述べられる実施形態は人工建造物を加工する観点で開示されるが、なおも別の実施形態では本発明は自然の建造物(例えば採鉱または穴明け操作の一部として)加工するために有用である。
【0025】
本願明細書に述べられる方法および装置は当該技術の状況の大幅な進歩を表わす。本装置の様々な実施形態は複数の要素と方法の新しく斬新な配列を有し、それは独特でかつ新規的な方式で構成され、かつ以前は入手不可能であったが望ましい性能を示す。特に、本発明の或る実施形態は、静かで実質的に振動が無く、かつ粉塵、破片、または有害な噴煙を発散させにくい材料加工方法を提供する。付け加えると、或る実施形態は従来式の技術が行なうよりも高い速度の材料加工を可能にする。
【0026】
図面と結び付けて下記で述べられる詳細な説明は単に本発明の様々な実施形態の説明として意図されており、本発明が構築または利用される唯一の形式を表わすように意図されるものではない。本説明は本発明を導入する設計、機能、装置、および方法の具体例となる実施形態を記述する。しかしながら、異なる実施形態によって同じもしくは同等の機能および特徴が達成されることが可能であり、それらもやはり本発明の精神と範囲の中に包含されるように意図されることは理解されるべきである。
【0027】
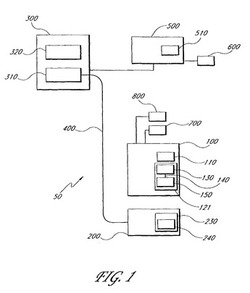
図1は表面を有する建造物を加工するための装置50の実施形態を概略的に例示している。装置50はレーザの基本ユニット300、レーザ操作システム100、および制御器500を有する。レーザの基本ユニット300は相互作用領域にレーザ光を供給するように構成され、レーザ発生器310およびレーザ発生器310に連結されたレーザヘッド200を有する。レーザヘッド200は相互作用領域から材料物質を取り除くように構成される。レーザ操作システム100は取り外し可能に建造物へと連結されるように構成された固定用メカニズム110、および固定用メカニズム110へと連結され、かつレーザヘッド200へと連結された位置決め用メカニズム121を有する。レーザ操作システム100は建造物に相対してレーザヘッド200の位置を制御可能に調節するように構成される。制御器500は電気的にレーザの基本ユニット300およびレーザ操作システム100へと連結される。制御器500はユーザの入力に応答して制御信号をレーザの基本ユニット300およびレーザ操作システム100へと送信するように構成される。
【0028】
或る実施形態では、レーザヘッド200は取り外し可能にレーザ発生器310へと連結され、かつ取り外し可能に位置決め用メカニズム121へと連結される。或る実施形態では、位置決め用メカニズム121は取り外し可能に固定用メカニズム110へと連結され、制御器500は取り外し可能にレーザの基本ユニット300およびレーザ操作システム100へと連結される。そのような実施形態は、加工される建造物の付近もしくは中の場所への装置50の輸送を容易にするように可逆的に組み立ておよび解体されることが可能な装置50を提供することが可能である。
【0029】
(レーザの基本ユニット)
レーザの基本ユニット300の或る実施形態が下記で述べられる。下記でレーザの基本ユニット300は分離型の複数の部品を有するように述べられるが、他の実施形態はこれらの部品のうちの2つ以上の組み合わせを一体ユニットで有することが可能である。
【0030】
・レーザ発生器
図2は本願明細書に述べられた実施形態に適合するレーザの基本ユニット300を概略的に例示している。或る実施形態では、レーザの基本ユニット300はレーザ発生器310および冷却用サブシステム320を有する。レーザ発生器310は、レーザ発生器310に電力供給するために充分の適切な電圧、位相、およびアンペア数の電力を供給する電源(図示せず)へと連結される。この電源もやはり或る実施形態では持ち運び可能であり、冷却用の水、空気、または装置50が動作している施設からの電力を伴うことなく動作することが可能である。範例となる電源は、限定はされないがディーゼルを動力源とする発電機を含む。
【0031】
或る実施形態では、レーザ発生器310はアーク放電ランプで励起されるNd:YAGレーザを含むことが好ましいが、しかし場合によってはCO2レーザ、ダイオードレーザ、ダイオードで励起されるNd:YAGレーザ、ファイバレーザ、ディスクレーザまたは他のタイプのレーザシステムを含むことが可能である。レーザ発生器310はパルスモードまたは連続波モードのどちらかで動作させられることが可能である。本願明細書に述べられる実施形態による1つの範例のレーザ発生器310はDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能なTrumpf4006D、4000ワットの連続波レーザを含む。他の範例の実施形態では、Ybドープされたファイバレーザ、またはErドープされたファイバレーザが使用されることが可能である。他の出力パワー(例えば2000ワット)を備えた他のタイプのレーザが本願明細書に述べられる実施形態で互換性がある。本願明細書に述べられる方法および装置の所定の用途に特有の必要条件に応じて、当業者は当面の目的のために最適のレーザを選択することが可能であろう。
【0032】
或る実施形態では、レーザ発生器310は輸送および保管を容易にするために出荷用のコンテナの中に置かれることが可能である。レーザ発生器310は、ガラス光ファイバケーブルを通してレーザ発生器310から作業場所へと供給されることが好ましいレーザ光を発生する。
【0033】
或る代替選択肢の実施形態では、レーザ発生器310は気体ベースのCO2レーザを有し、これはCO2ガスの励起によってレーザ光を発生する。そのようなレーザは高い効率(例えば約5〜13%)で高出力パワー(例えば約100W〜50kW)を供給し、かつ相対的に安価である。そのような気体ベースのCO2レーザによって作り出されるレーザ光は通常ではミラーによって、および屈曲部もしくは隅の付近にレーザ光を供給するためのダクトもしくはアームのシステムを使用して供給される。
【0034】
或る代替選択肢の実施形態では、レーザ発生器310はダイオードレーザを有する。そのようなダイオードレーザは気体およびNd:YAGレーザに比べて小型であり、それゆえにそれらは直接供給構造で(例えば作業場所に近接して)使用されることが可能である。ダイオードレーザは高い電力効率(例えば約25〜40%)で高出力(例えば約10W〜6kW)を供給する。或る実施形態では、ダイオードレーザから出るレーザ光はいくらかの相当する出力の損失を伴うが光ファイバを経由して供給されることが可能である。
【0035】
Nd:YAGレーザを使用する実施形態はCO2レーザまたはダイオードレーザを伴う実施形態を上回る或る一定の利点を有することが可能である。材料加工産業ではNd:YAGレーザに伴う長い工業的経験があり、それらは高出力(例えば約100W〜6kW)を供給する。付け加えると、Nd:YAGレーザから出るレーザ光は相対的に小規模で長い光ファイバを通じてわずかの出力損失(例えば約12%)しか伴わずに光ファイバによって供給されることが可能である。これは作業領域から比較的遠い(例えば約100メートルの)場所にレーザ発生器310と支持機材を計画することを許容する。加工される表面から遠くにレーザ発生器310を保持することは装置50の残りの部分がさらに小型でさらに携帯型にされることを可能にする。
【0036】
アーク放電ランプの励起によるNd:YAGレーザはNd:YAG結晶を励起してレーザ光を発生するためにアーク放電ランプを使用する。ダイオード励起によるNd:YAGレーザはNd:YAG結晶を励起するためにダイオードレーザを使用し、結果として電力効率の上昇につながる(例えばアーク放電ランプの励起によるNd:YAGレーザで5%未満であることに比べて約10〜25%)。この向上した効率は結果としてさらに良好なビーム品質を有し、さらに小型の冷却用サブシステム320を要するダイオード励起型レーザにつながる。範例のアーク放電ランプ励起によるNd:YAGレーザはDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能である。
【0037】
本願明細書に述べられる実施形態に適合したNd:YAGおよび他の固体レーザ(例えばNd:YLiF4、Ti:サファイヤ、Yb:YAGなど)はいくつかの方法によって構成され、かつ励起されることが可能である。これらの方法は、限定はされないがフラッシュランプおよびアークランプ、ならびにダイオードレーザを含む。限定はされないが棒状、厚板状、およびディスク状の構造を含めた様々な構造の固体媒体が本願明細書に述べられる実施形態に適合する。多様な構造および励起方法の利点は、限定はされないがレーザ発生器310の効率、ビーム品質、および動作モードを含めたレーザ発生器310の様々な態様に影響を与えるであろう。例えば、ディスクレーザは、反射面の一方をヒートシンクとして使用するダイオード励起型ウエハすなわち「ディスク」に基づく。或る実施形態では、このようなディスクレーザによって、熱の影響が少ないまま高出力パワーを得られ、また、直径の小さいファイバに照射し得る高効率(例えば、20%)および高品質のレーザビームを供給し得る。範例となるダイオード励起によるNd:YAGディスクレーザはDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能である。
【0038】
ファイバレーザはレーザビームを作り出すためにドープされた(例えばイッテルビウムまたはエルビウムでドープされた)ファイバを使用する。ドープされたファイバは、限定はされないがアーク放電ランプおよびダイオードを含めた他の光源によって励起されることが可能である。ファイバレーザはレーザビームを相互作用場所へと搬送する供給用ファイバへと連結されることが可能である。或る実施形態では、ファイバレーザは約15%から約20%の有利な効率を提供する。そのような高効率はレーザ発生器310をさらに移動型にするが、なぜならばそれらがさらに小型の冷却ユニットを利用するからである。付け加えると、加工される領域に近接してそのような高効率レーザ発生器310が配置され
ることが可能である。本願明細書に述べられる実施形態に適合した範例のファイバレーザは、Oxford,MassachusettsのIPG Photonics社から入手可能なYLR−4000であり、これは、4000ワット、連続波(CW)で、約1070ナノメートルの赤外線に近い波長で作動する、イッテルビウム:イットリウム−アルミニウム−ガーネット(Yb:YAG)ファイバレーザである。
【0039】
通常では、レーザ発生器310によるレーザ光の発生は余剰の熱を作り出し、これはレーザ発生器310に連結された冷却用サブシステム320によってレーザ発生器310から取り除かれることが好ましい。必要とされる冷却の量は使用されるレーザのサイズおよびタイプによって決定されるが、4kWのNd:YAGレーザについては約190kWの冷却容量であることが可能である。冷却用サブシステム320は既存のプロセス水もしくは冷却水による冷却用サブシステムのように、現場で余剰の冷却能力を利用することが可能である。場合によっては、レーザ発生器310専用のユニット型冷却用サブシステムが使用されることが好ましい。ユニット型冷却用サブシステムは空冷または液冷されることが可能である。
【0040】
図2に概略で例示されるような或る実施形態では、冷却用サブシステム320はレーザ発生器310に充分な循環冷却水を供給して余剰の熱を除去するようにレーザ発生器310へと連結された熱交換器322および水冷器324を有する。熱交換器322は水から余剰の熱の一部を除去し、その水を水冷器324へと戻して循環させることが好ましい。水冷器324は予め決められた温度に水を冷却し、その冷却水をレーザ発生器310へと戻す。本願明細書に述べられる実施形態による範例の熱交換器322および水冷器324はDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能である。
【0041】
・レーザヘッド
或る実施形態では、レーザヘッド200はレーザ発生器310へと連結され、装置50と照射される建造物との間のインターフェースとしてはたらく。図1で概略的に例示されるように、エネルギー導管400がレーザヘッド200とレーザ発生器310を連結し、レーザ発生器310からレーザヘッド200へのエネルギーの伝達を容易にする。或る実施形態では、エネルギー導管400は光ファイバを有し、それがレーザ発生器310からレーザヘッド200へとレーザ光を伝達する。他の実施形態では、エネルギー導管400は光ファイバ、電力供給または制御用配線ケーブルを含むことが可能な導体を有する。例示的なエネルギー導管400は、50メートルのファイバを含む。或る実施形態では、照射される表面は、居住可能な建造物内にある。以下にさらに十分な説明をするように、或る実施形態は、比較的小型で、コンパクト、軽量な装置を提供し、当該装置は、居住可能な建造物内の種々の場所に運ばれ、居住可能な建造物内の比較的狭く取り囲まれた空間内において使用し得る。
【0042】
図3Aは本願明細書に述べられた実施形態によるレーザのヘッド200を概略的に例示している。レーザヘッド200はコネクタ210、少なくとも1つの光学素子220、ハウジング230、気体格納容器240を有する。或る実施形態では、コネクタ210はハウジング230へと連結され、エネルギー導管400を介してレーザ発生器310へと光学的に連結され、レーザ発生器310から出るレーザ光を伝達するように構成される。光学素子220はコネクタ210、ハウジング230、または気体格納容器240の中に配置されることが可能である。図3Aは光学素子220がハウジング230の中にある実施形態を例示している。導管400がレーザヘッド200へとレーザ光を供給する実施形態では、レーザ光は照射される建造物に衝突する前に光学素子220を通過して伝達される。
【0043】
・レーザヘッド:拡張された構造
図3Bは本願明細書に述べられた実施形態によるレーザヘッド200の1つの構造を概略的に例示している。ハウジング230は遠位部分232、角部分234、および近位部分236を有する。本願明細書で使用される「遠位」および「近位」という用語は相互作用領域に相対した部分の位置に該して関する標準的な定義を有する。コネクタ210が遠位部分232へと連結され、それが角部分234へと連結され、それが近位部分236へと連結され、それが気体格納容器240に連結される。図3Bに例示されるような構造は建造物(例えばコンクリートの壁)の表面に穴明けおよび荒仕上げを行なうために使用されることが可能である。レーザヘッド200の様々な部品はFarmington Hills,MichiganのLaser Mechanisms,Inc.社から入手可能である。
【0044】
エネルギー導管400が光ファイバを有する或る実施形態では、コネクタ210はレーザ発生器310から光ファイバを通してレーザヘッド200へと伝送されるレーザ光を受け取る。或るそのような実施形態では、コネクタ210は導管400によって発射される発散レーザ光を平行化するレンズ212を有する。レンズ212は透過型であって所望の量でレーザ光を屈折させるであろう様々な材料を含むことが可能である。そのような材料は、限定はされないがホウ珪酸クラウンガラス(BK7)、石英(SiO2)、セレン化亜鉛(ZnSe)、および塩化ナトリウム(NaCl)を含む。レンズ212の材料は材料の品質、コスト、および安定性に基づいて選択されることが可能である。ホウ珪酸クラウンガラスは透過型光学系のためにNd:YAGレーザと共に一般的に使用され、セレン化亜鉛は透過型光学系のためにCO2レーザと共に一般的に使用される。
【0045】
レンズ212は、レンズ212の洗浄、保守管理、および交換を容易にするために或る実施形態では取り外し可能な組み立て品に装着されることが可能である。付け加えると、レンズ212の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。或る実施形態では、レンズ212はビームのプロファイル(例えば焦点集束、ビーム形状)の追加的な修正を提供することが可能である。
【0046】
或る実施形態の平行化されたレーザ光はその後、レーザヘッド200の中の他の光学素子を経由してレーザヘッド200を通して伝送される。或る実施形態では、遠位部分232は該して真っ直ぐの第1のチューブを含み、これを通ってレーザ光が角部分234へと伝搬し、近位部分236は該して真っ直ぐの第2のチューブを含み、これを通って角部分234からレーザ光が伝搬する。或る実施形態では、遠位部分232はレンズ233を含み、角部分234は近位部分236および気体格納部分240を通して建造物上に光を向けるミラー235を含む。他の実施形態では、近位部分236および気体格納部分240を通して建造物上に光を向けるために他の装置(例えばプリズム)が角部分234内で使用されることが可能である。
【0047】
レンズ233は、レンズ233の洗浄、保守管理、および交換を容易にするために或る実施形態では取り外し可能な組み立て品に装着されることが可能である。付け加えると、レンズ233の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。或る実施形態では、レンズ233はレンズ212から受け取る光を焦点集束し、その一方でレンズ233はビームのプロファイル(例えばビーム形状)の追加的な修正を提供することが可能である。範例となるレンズ233は、限定はされないが焦点距離600mmのシリカ製平凸レンズ(例えばAlbuquerque,New MexicoのCVI Laser Corp.社から入手可能な部品番号PLCX−50.8−309.1−UV−1064)を含む。レンズ233は透過型であって所望の量でレーザ光を屈折させるであろう様々な材料を含む
ことが可能である。そのような材料は、限定はされないがホウ珪酸クラウンガラス、石英、セレン化亜鉛、および塩化ナトリウムを含む。範例のレンズ装着組み立て品は、限定はされないがFarmington Hills,MichiganのLaser Mechanisms,Inc.社から入手可能な部品番号PLALH0097およびPLFLH0119を含む。
【0048】
遠位部分232が近位部分236に対して実質的に直角である図3Bで概略的に例示される実施形態では、ミラー235は約90度の角度で光を反射する。他の実施形態は他の角度で光を反射するように構成される。ミラー235は、ミラー235の洗浄、保守管理、および交換を容易にするために或る実施形態では取り外し可能な組み立て品に装着されることが可能である。付け加えると、ミラー235の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。或る実施形態ではミラー235は光ビームを焦点集束させるかまたはそうでなければビームプロファイル(例えばビーム形状)を修正するように曲率を有するか、またはそうでなければそのように構成されることもやはり可能である。範例のミラー235は、限定はされないが銅ミラーのような金属製ミラー(例えばFarmington Hills,MichiganのLaser Mechanisms,Inc.社から入手可能な部品番号PLTRG19およびPLTRC0024)、および金コーティングされた銅ミラー(例えばLaser Mechanisms,Inc.から入手可能な部品番号PLTRC0100)を含む。他の実施形態では、誘電体をコーティングしたミラーが使用されることが可能である。
【0049】
図3Cは本願明細書に述べられた実施形態によるレーザヘッド200の別の構造を概略的に例示している。ハウジング230は遠位部分232、第1の角部分234、第2の角部分234’、および近位部分236を有する。コネクタ210が遠位部分232へと連結され、それが第1の角部分234へと連結され、それが第2の角部分234’へと連結されそれが近位部分236へと連結され、それが気体格納容器240へと連結される。図3Cで例示されるような構造は空間的に制限された領域内の建造物を切削するため(例えば隅または突起部付近のコンクリート壁の部分を切削するため)に使用されることが可能である。
【0050】
上述されたように或る実施形態では、コネクタ210はレンズ212を有し、遠位部分232は管状であってレンズ233を有する。図3Cで例示された実施形態の第1の角部分234は第1のミラー235を有し、それが第2のミラー235’を有する第2の角部分234’へと光を方向付ける。第2のミラー235’は管状であることが可能な近位部分236、および気体格納容器240を通って建造物上へと光を方向付ける。或る実施形態では、下記で気体格納容器240に関してさらに充分に述べられるように、光は窓243およびノズル244を通って相互作用領域へと伝達される。或る実施形態では、レーザヘッド200が窓243およびノズル244を有し、その一方で他の実施形態では窓243およびノズル244は気体格納容器240の部品である。
【0051】
図3Cで概略的に例示された実施形態では、第1のミラー235が約90度の角度で光を反射し、第2のミラー235’が約−90度の角度で光を反射し、それにより、近位部分236は遠位部分に実質的に平行になる。そのような実施形態では、気体格納容器240によって発射される光は遠位部分232を通って伝搬する光と実質的に平行であるが、それから離れている。他の実施形態は、光を他の角度で反射するように構成された第1のミラー235および第2のミラー235’を有する。或る実施形態は気体格納容器240によって発射される光の、遠位部分232を通って伝搬する光からの追加的な移動を供給するために第1の角部分234と第2の角部分234’との間に直線の管状部分を有する。
【0052】
或る実施形態では、遠位部分232と第1の角部分234との間の結合部が回転可能である。或る別の実施形態では、第1の角部分234と第2の角部分234’との間の結合部が回転可能である。これらの回転可能な結合部は蝶ネジによってロックされることが可能なスイベル継手を有することが可能である。そのような実施形態は、気体格納容器240によって発射される光を選択された方向に向ける処理に追加的な自在性を与える。或る実施形態では、選択される方向は遠位部分232を通って伝搬する光とは非平面にある。
【0053】
上述されたように、第1のミラー235と第2のミラー235’のうちの一方または両方が或る実施形態では洗浄、保守管理、および交換を容易にするために取り外し可能な組み立て品に装着されることが可能である。付け加えると、第1のミラー235および/または第2のミラー235’の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。或る実施形態では、第1のミラー235と第2のミラー235’のうちの一方または両方が、光ビームを焦点集束させるかまたはそうでなければビームプロファイル(例えばビーム形状)を修正するように曲率を有するか、またはそうでなければそのように構成されることもやはり可能である。
【0054】
或る実施形態では、レーザヘッド200の中の1つまたは複数の光学素子220(例えばレンズ212、レンズ233、ミラー235、ミラー235’)は水冷されるかまたは空冷される。冷却水は、レーザヘッド200の近くに配置され、かつレーザヘッド200へと流れる充分な水を供給することに専用にされた熱交換器によって供給されることが可能である。或るそのような実施形態では、各々の光学素子220のための冷却水用の導管が、光学素子220の付近を順々に冷却水が流れるように直列に接続されることが可能である。他の実施形態では、様々な光学素子220の付近に冷却水の別々の部分が流れるように導管は並列に接続される。範例の熱交換器は、限定はされないがAppleton,WisconsinのMiller Electric Manufacturing Co.社から入手可能なMiller Coolmate(登録商標)4を含む。冷却水の流量は少なくとも毎分約0.5ガロンであることが好ましい。
【0055】
・レーザヘッド:小型構造
図20および図21A〜図21Cは本願明細書に述べられた実施形態によるレーザヘッド1200の他の複数の構造を概略的に例示している。図21Dは、本願明細書に述べる実施形態によるレーザヘッド1200および固定用メカニズム1110の例示的な小型構造を示している。レーザヘッド1200の或る実施形態は可動性であって、かつ1人の個人によって照射される表面に相対して定位置に設置されるように構成される。或るそのような実施形態では、レーザヘッド1200と、下記で検討される固定用メカニズム1110の或る実施形態との組み合わせは50ポンド未満の重さである。或るそのような実施形態は、深さ約9.5インチまでコンクリートに孔をあけるために用いると都合がよい。
【0056】
図20で例示される実施形態は、通常、照射される表面に穴をあけるために適しており、通常では図3Bおよび3Cの実施形態よりも小さいサイズと重量であり、それにより、一層制約のある空間にアクセスすることに適した装置を提供する。付け加えると、図20の実施形態は通常では図3Bおよび3Cの実施形態よりもさらに単純でさらに頑丈であり、それにより、粗雑な取り扱いおよび非理想的な動作条件に耐えるように構成される装置を提供する。
【0057】
或る実施形態ではレーザヘッド1200は該して長方形のハウジング1230を有する。レーザヘッド1200の他の実施形態はハウジング1230上、またはハウジング1230の中に配置される。或る実施形態のハウジング1230は接続構造体(図示せず)を
有し、それが固定用メカニズム1110へと取り外し可能に連結されるように構成され、それが、下記でさらに述べられるように、照射される表面に相対してレーザヘッド1200を位置決めするように構成される。範例の実施形態では、ハウジング1230は約12インチの長さ、約8インチの高さ、および約4インチの幅を有する。ハウジング1230の他の形状および寸法が本願明細書に述べられる他の実施形態と適合する。
【0058】
或る実施形態では、レーザヘッド1200はレーザ発生器310からレーザヘッド1200へとレーザ光を搬送する導管400に連結されるように適合されたコネクタ1210をさらに有する。或る実施形態ではコネクタ1210は導管400によって発射される発散レーザ光を平行化するレンズ(図示せず)を有する。例示的実施形態において、レンズは、約23.6インチ(約600ミリメートル)の焦点距離を有し、調節可能なレンズ収納体(lens drawer)内に配置される。拡張された構造に関して上述されたように、様々
な実施形態のレンズは様々な材料を含むことが可能であり、取り外し可能にハウジング1230へと装着されることが可能であり、調節可能にハウジング1230へと装着されることが可能であり、ビームプロファイルの追加的な修正を提供することが可能である。
【0059】
或る実施形態では、レーザヘッド1200はさらに、コネクタ1210から第1のゼロ以外の角度で光を反射するように構成された第1のミラー1235、第1のミラー1235から第2のゼロ以外の角度で、気体格納容器240へと連結されるように構成されるノズル1244へと光を反射するように構成された第2のミラー1235’を有する。或る実施形態では、図20に概略的に例示されるように第1のゼロ以外の角度は第2のゼロ以外の角度の負にほぼ等しい。一層小さい空間に入る長さを有する伝搬経路を効率的に「折り返す」ミラー間で光を反射するので、そのような2つのミラーの構成はしばしば「折り返し光学系」と呼ばれる。レーザヘッド1200の或る実施形態はレーザ光のビームプロファイルを修正するように構成された追加的な光学部品を有する。
【0060】
拡張された構造に関連して上述されたように、第1のミラー1235と第2のミラー1235’のうちの少なくとも1つはハウジング1230の中で取り外し可能かつ調節可能な組み立て品上に装着される。付け加えると、或る実施形態の第1のミラー1235と第2のミラー1235’のうちの少なくとも1つはビームプロファイルを修正するように曲率を有するか、そうでなければそのように構成される。或る実施形態の第1のミラー1235と第2のミラー1235’のうちの少なくとも1つは冷却用導管によって供給される空気または水のどちらかで冷却される。例えば、或る実施形態では、水を少なくとも約0.5ガロン/秒の速度でレーザヘッド1200に流し得る。或る実施形態では、冷却用導管はハウジング1230の中に収容され、それにより、レーザヘッド1200をさらに扱い易くし、かつレーザヘッド1200をさらに頑丈にすることでレーザヘッド1200の輸送および設置を容易にする。ある実施形態のレーザヘッド1200は、電気的コネクタ1215をさらに備え、当該コネクタ1215は、電気コードに接続されて、レーザヘッド1200に電力を供給し、かつ/またはセンサ信号をレーザヘッド1200から制御器500に供給し得る。ある実施形態では、レーザヘッド1200は、1つまたはそれ以上のステータスライト1217をさらに備え、当該ライト1217は、レーザヘッド1200のステータスに関する情報を提供する。
【0061】
或る実施形態では、図21Cおよび図21Dに示されるようにレーザヘッド1200はハウジング1230に連結されたレーザヘッドハンドル1240を有する。レーザヘッドハンドル1240はレーザヘッド1200を選択された場所に輸送および位置決めすることを容易にするように適合される。レーザヘッドハンドル1240の他の構造は本願明細書に述べられる他の実施形態に適合する。或る実施形態のレーザヘッド1200はさらに、レーザヘッド1200を固定用メカニズム1110へと取り外し可能に連結するように構成されたカプラ1250を有する。レーザヘッド1200の他の構造は本願明細書に述
べられる実施形態に適合する。
【0062】
或る実施形態では、図21A〜図21Dに示されるようなレーザヘッド1200の小型の構造(「小型レーザヘッド」)は図3Bおよび3Cに示されたようなレーザヘッドの拡張された構造(「拡張型レーザヘッド」)200よりも或る用途で有利に使用される。例えば、建造物に穴をあけるとき、拡張型レーザヘッド200がその長さもしくは他の制約(例えばエネルギー導管400とコネクタ210の間の連結部の剛性)のせいでアクセスを有することが不可能な領域が存在し得る。小型レーザヘッド1200はさらに小さい体積を有し、それにより、さらに小さい領域へのアクセスを可能にする。
【0063】
付け加えると、或る実施形態では、エネルギー導管400とレーザヘッド1200のコネクタ1210との間の回転式連結を供給するように構成された枢動型コリメータヘッド1250を有するエネルギー導管400と結び付けて小型レーザヘッド1200が使用される。そのような実施形態では、枢動型コリメータヘッドは、レーザヘッド1200をさらに小さい領域にアクセスさせることにより追加の可撓性を提供する。このコリメータヘッドは、レーザ光がレーザヘッド1200に入射するのと同じ方向にエネルギー導管400が向くようにまっすぐであってもよく、エネルギー導管400が、図21Dに示したように、異なる方向に向くようなある角度(例えば90度)を有してもよい。異なる配向でコリメータヘッドを使用することは都合の良いことに、制約のある領域へのアクセスを与えるためにエネルギー導管400の様々な配向を可能にする。本願明細書に述べられた実施形態に適合する範例のコリメータヘッドはDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能である。
【0064】
さらに、或る実施形態では小型レーザヘッド1200はハウジング1230の中に様々なセンサ、近接スイッチ、および流量計もやはり組み入れる。例えば、レーザヘッド1200は、1つまたはそれ以上のセンサを備え、当該センサは、以下の1つまたはそれ以上のものを、すなわち、レーザヘッド1200が居住可能な建造物の表面と接触しているか否か、レーザヘッド1200が、固定用メカニズム1110と結合されているか否か、レーザ発生器310がオンになっているかまたは始動しているか否かの1つまたはそれ以上を測定し得る。そのような実施形態は該して拡張型レーザヘッド200よりもさらに単純でさらに頑丈であり、それにより、粗雑な取り扱いおよび非理想的な動作条件に耐えるように適合され、かつさらに損傷を受けにくい装置を提供する。
【0065】
・レーザヘッド:軽量構造
図22Aは固定用メカニズム1110と軽量レーザヘッド2200の組み合わせを概略的に例示している。図22Bは、別の例示的な軽量型レーザヘッド2200および固定用メカニズム1110を示している。図22Bに示すように、軽量型レーザヘッド2200は、コネクタ2210を備え、当該コネクタ2210を通って、レーザ光がレーザヘッド2200に伝送される。ある実施形態のレーザヘッド2200は、さらに電気的コネクタ2215を備え、当該電気的コネクタ2215は、電気コードに接続されて、レーザヘッド2200に電力を供給し、かつ/またはセンサ信号をレーザヘッド2200から制御器500に供給し得る。ある実施形態では、レーザヘッド2200は、1つまたはそれ以上のステータスライト2217をさらに備え、当該ライト2217は、レーザヘッド2200のステータスに関する情報を提供する。或る実施形態では、レーザヘッド2200は、冷却ライン2218に結合され、当該冷却ライン2218は、冷却水を、レーザヘッド2200内のミラー、レンズ、または他の光学素子に供給し得る。
【0066】
図22Cに、図22Bのレーザヘッド2200に結合された気体格納器240を示す。気体格納器240は、気体格納ハウジング242と、照射される表面と接触するように構成された弾力性インターフェース246とを備える。ある実施形態では、気体格納器24
0は、レーザヘッド2200から取り外し、かつ/またはレーザヘッド2200に沿って調節して、表面にレーザを照射するための、レーザヘッド2200および気体格納器240の位置決めを容易にし得る。
【0067】
或る実施形態では、レーザヘッド2200は140ミリメートルの焦点距離を有し、市販入手可能な、例えばDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能な冷却用および観察用ポートを備えたD35(カタログ番号35902090)の90度フォーカスヘッドである。或る実施形態のレーザヘッド2200は、直径が約6ミリメートルの比較的浅い(例えば、深さが約65ミリメートルの)穴をあけるように構成される。或る実施形態では、レーザヘッド/固定用メカニズムの組み合わせは10ポンド未満の重さであり、その一方で他の実施形態ではその組み合わせは約8ポンドである。ある実施形態では、レーザヘッド2200は、上述のように、スイッチの近傍に、1つまたはそれ以上のセンサまたは流量計を備える。
【0068】
・レーザヘッド:気体格納容器
或る実施形態では、レーザヘッド200は近位部分236へと連結され、かつ建造物とのインターフェースとなる気体格納容器240を有する。或る実施形態では、気体格納容器240は建造物から除去される材料物質(例えばレーザ加工中に発生する破片および噴煙)を閉じ込め、相互作用領域からその材料物質を取り除くように構成される。気体格納容器240はまたさらに、相互作用領域から気体格納容器240の外へと(例えばレーザの公称の危険ゾーン(「NHZ」)へと)発射される騒音と光を削減するように構成される。気体格納容器240の1つの目標は、いずれの個人の眼または皮膚にも被曝放出限界(「AEL」)または最大許容曝露(「MPE」)限界を超えるレーザ放射が到達しないことを確実化することであることが可能である。
【0069】
図4は本願明細書に述べられる実施形態による気体格納容器240の断面を概略的に例示している。図4の気体格納容器240は気体格納ハウジング242、窓243、ノズル244、弾力性インターフェース246、抽出ポート248、および圧縮ガス注入口249を有する。気体格納ハウジング242はレーザ光の供給源(例えばレーザヘッド200の近位部分236)へと連結されることが可能であり、気体格納容器240の他の複数部品の構造的支持を提供することが可能である。気体格納ハウジング242用の範例の材料は、限定はされないが薄い可撓性のシートであることが可能な金属(例えばアルミニウム、スチール)、セラミック材料、ガラスもしくはグラファイトの繊維、およびガラスもしくはグラファイトの繊維で作られた織物を含む。或る実施形態では、気体格納ハウジング242が空気または水のどちらかで冷却されることで気体格納ハウジング242の加熱を減少させる。気体格納ハウジング242用の冷却剤導管はレーザヘッド200の他の部品用の冷却剤導管と直列または並列に連結されることが可能である。
【0070】
或る実施形態の窓243はノズル244の上流で、かつ近位部分236から建造物へのレーザ光の伝搬経路の中に位置決めされる。本願明細書で使用する「上流」および「下流」という用語はレーザ光の伝搬方向およびレーザ光の伝搬方向と反対の方向にそれぞれ関する一般的意味を有する。そのような実施形態では、気体格納容器240を通って伝搬する光はノズル244に到達する前に窓243に到達する。光が窓243を通って下流へと伝搬するそのような実施形態では、窓243はレーザ光に対して実質的に透過性である。レーザ光を下流方向に伝送するために窓243は気体格納ハウジング242の中に装着されることが可能である。窓243は、限定はされないが方形および円形を含めたいくつかの形状を有することが可能である。範例の窓243は、限定はされないがシリカの窓(例えばAlbuquerque,New MexicoのCVI Laser Corp.社から入手可能な部品番号W2−PW−2037−UV−1064−0)を含む。
【0071】
レーザヘッド200の光学素子上の粉塵および/または埃はレーザ光の目に見えるほどの画分を吸収する可能性が高く、結果として不均一な加熱につながり、それが光学素子に損傷を与えることがあり得る。或る実施形態では、レーザ光と建造物との相互作用によって発生する粉塵、煙、または他の粒子状物質の上流への輸送に対するバリヤを供給するために窓243が気体格納ハウジング242の中に装着される。この方式で、窓243はレーザヘッド200の他の部分の中の上流の光学素子の保護を容易にすることが可能である。
【0072】
窓243は、窓243の洗浄、保守管理、および交換を容易にするために或る実施形態では取り外し可能な組み立て品に装着されることが可能である。或る実施形態では、窓243は近位部分236から受け取る光を焦点集束させ、その一方で他の実施形態では、窓243はビームプロファイル(例えばビーム形状)の追加的な修正を提供することが可能である。そのような実施形態では、窓243の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。範例の窓装着組み立て品は、限定はされないがFarmington Hills,MichiganのLaser Mechanisms,Inc.社から入手可能な部品番号PLALH0097およびPLFLH0119を含む。或る実施形態では、窓243は空気または水のどちらかで冷却される。
【0073】
窓243を通して伝送されるレーザ光はノズル244を通して建造物の相互作用領域に向けて発射される。レーザ光はノズル244の開口部付近で焦点集束させられることが可能である。ノズル244のための範例の材料は、限定はされないが金属(例えば銅)を含む。或る実施形態では、ノズル244の加熱を減少させるためにノズル244は空気または水のどちらかで冷却される。ノズル244用の冷却剤導管はレーザヘッド200の他の部品用の冷却剤導管と直列または並列に連結されることが可能である。
【0074】
ノズル244を通って伝搬するレーザ光は、ノズル244を過剰に加熱すること、および傷つけることを避けるためにノズル244に衝突(「クリッピング」と称される)しないことが好ましい。レーザヘッド200を通るレーザ光の不適切な位置合わせはクリッピングを引き起こす可能性が高い。ノズル244の開口部は、レーザ光がノズル244と目に見えるほどに相互作用しないように充分に大きいことが可能である。或る実施形態では、ノズル244は直径で約0.3インチである。
【0075】
或る実施形態では、気体格納容器240の弾力性インターフェース246は建造物に接触し、かつ相互作用領域を実質的に取り囲むように構成され、それにより、相互作用領域の封じ込め、およびそこからの材料物質の除去を容易にする。付け加えると、弾力性材料246は、気体格納容器240の外側への光および/または音漏れの防止を容易にすることが可能である。範例の弾力性材料246は、限定はされないがワイヤブラシまたはゴム製シール(例えば、バルブシール)を含む。ワイヤブラシは、インターフェース領域の熱、光、溶融した材料、および他の環境上の態様にさらされることに耐え得る金属材料を含む。ゴム製シールは、ゴム材料を含み、ゴム材料は、相互作用領域の熱、光、溶融した材料、および他の環境上の状況にさらされても耐え得る。本願明細書における開示の観点から、本願明細書による弾力性インターフェース246に適切な材料を、当業者は選択し得る。
【0076】
或る実施形態では、気体格納容器240の抽出ポート248は動作中に相互作用領域内で発生する材料物質(例えばガス、蒸気、粉塵、および破片)のうちの目に見えるほどの部分を抽出するように構成される。抽出ポート248は相互作用領域から材料物質(例えば粉塵、ガス、および蒸気を引き抜くために真空を作り出す真空発生器(図示せず)へと連結されることが可能である。この方式で、抽出ポート248は気体格納容器240から
の材料物質の除去のための経路を供給することが可能である。
【0077】
或る実施形態では、圧縮ガス注入口249は気体格納容器240に圧縮ガス(例えば空気)を供給するように構成される。或る実施形態では、圧縮ガス注入口249は圧縮ガス流を相互作用領域に方向付けるように構成されるノズル244へと流体連結される。或る実施形態では、圧縮ガス流はノズル244を通るレーザ光と同軸に流れる。或る実施形態の窓243は圧縮ガスが圧力を加える対象の表面を与える。この方式で、圧縮ガスは選択された圧力と速度でノズル244を通って相互作用領域へと流れることが可能である。
【0078】
圧縮ガス注入口249からノズル244を通って流れる圧縮ガスは粉塵、破片、煙、およびその他の粒子状物質がノズル244に入ることを阻止するために使用されることが可能である。この方式で、圧縮ガスはそのような粒子状物質からの窓243の保護を容易にすることが可能である。付け加えると、圧縮ガスは相互作用領域からの材料物質の除去を容易にするように、かつ/または相互作用領域を冷却するようにノズル244によって相互作用領域へと方向付けられることが可能である。建造物がSiの高い百分率を備えたコンクリートを有し、それにより、結果的に生じるガラス質のスラグが充分に粘性を有して相互作用領域から除去することが一層困難である実施形態では、ノズル244はこの様式で使用されることが可能である。
【0079】
或る実施形態では、窓243の表面の不純物汚染、および不均一な加熱による窓243のあり得る損傷を避けるために、圧縮ガスは実質的に油分、湿気、またはその他の不純物を含まない。計器用品質(「IQ」)の圧縮空気の範例の供給源はDavidson,North CarolinaのIngersoll−Rand Air Solutions Group社から入手可能な300−IQ圧縮空気である。圧縮空気の供給源は空気を供給するホースの長さ、および空気を使用する部品の数とその必要量によって部分的に決定される充分な流量で空気を供給することが好ましい。
【0080】
或る実施形態では、空気圧縮機はレーザヘッド200から数百フィート離れて配置されることが可能である。そのような実施形態では、圧縮空気の供給源は空気圧縮機とレーザヘッド200の間の空気導管もしくはホース内に凝結する湿気の量を減らすために空気乾燥機を有することが可能である。本願明細書に述べられる実施形態による範例の空気乾燥機はWest Chester,PennsylvaniaのZeks Compressed Air Solutions社から入手可能な400HSB空気乾燥機である。
【0081】
或る実施形態では、図5に概略的に例示されるようにレーザヘッド200はレーザヘッド200と相互作用領域の間の相対的距離を測定するように構成されたセンサ250を有する。図5は、気体格納容器240がセンサ250を有する実施形態を概略的に例示しているが、しかしセンサ250の別の配置もやはり本願明細書に述べられた実施形態に適合する。建造物から材料物質が除去されると、相互作用領域は建造物の中へと広がる。そのとき、センサ250は相互作用領域の建造物の表面からの深さの指標を与える。センサ250はこの距離を判定するために、限定はされないが音響センサ、赤外線センサ、接触センサ、およびイメージセンサを含めた様々な技術を使用することが可能である。レーザによる荒仕上げ処理または加工が実行される或る実施形態では、レーザヘッド200と加工される表面との間の距離を判定するために、ダイオードレーザを有し、かつ三角測量を利用するセンサ250が使用されることが可能である。そのようなセンサ250は表面から除去される材料物質の量の指標を与えることもやはり可能である。
【0082】
或る実施形態では、センサ250は制御器500へと連結され、制御器500はセンサ250からの信号に応答してレーザの基本ユニット300へと制御信号を送信するように構成される。レーザの基本ユニット300はこの制御信号に応答してレーザ光の1つまた
は複数のパラメータを調節するように構成される。この方式で、レーザ光の焦点もしくは他のパラメータを調節するためにセンサ250からの深さ情報がリアルタイムで使用されることが可能である。
【0083】
他の実施形態では、制御器500はセンサ250からの信号に応答してレーザ操作システム100へと制御信号を送信するように構成される。レーザ操作システム100はこの制御信号に応答してレーザヘッド200と相互作用領域との間の相対的距離を調節するように構成される。さらに、レーザ操作システム100を、この制御信号に応答してレーザヘッド200の位置を構造の表面に沿って調節するように構成することもできる。この方式で、いったん第1の場所で所望の深さが達成されると表面に沿ってレーザ光を他の場所に移動させるように、第1の場所のセンサ250からの深さ情報がリアルタイムで使用されることが可能である。
【0084】
他の実施形態では、相互作用領域の深さを判定するためにセンサ250が統計学的方法と結び付けて使用される。そのような実施形態では、最初に測定段階でセンサ250が使用されることで統計学的データを作り上げ、それが浸食深さを或る一定の加工パラメータ(例えば加工される材料、光の強度)と相関付ける。測定段階の間では、選択される加工パラメータは試験を処理するため、または加工される建造物の表面を示すサンプル表面を処理するために系統的に変えられる。これらの加工パラメータに対応して相互作用領域の深さを判定するためにセンサ250が測定段階で使用される。或るそのような実施形態では、センサ250はレーザヘッド200から分離していることが可能であり、建造物の加工中、または相互作用領域の深さを測定するために加工が一時的に中断された期間中に使用されることが可能である。そのような実施形態に適合する範例のセンサ250は、限定はされないがキャリパ、あるいは相互作用領域の深さを判定するために結果的に生じた穴の中に挿入される他の手動式の測定装置を含む。
【0085】
或る実施形態では、制御器500は加工パラメータと相互作用領域の深さとの間の相関に関するこの結果的に得られた統計学的データを有する。それに続く加工段階の中で、今回はセンサ250を使用せずに建造物が加工され、制御器500が、使用される特定の加工パラメータに対応して統計学的データにアクセスすることによって相対的距離を判定するように構成されることが可能である。そのような取り組み方は建造物を加工中に相互作用領域の深さを判定するために信頼性があり、かつ費用効率の高い取り組み方である。
【0086】
代替選択肢の実施形態では、センサ250はレーザヘッド200と建造物の表面との間の距離の指標を与えるように構成される。そのような実施形態では、センサ250は予め決められた距離を超えるレーザヘッド200と建造物との間の相対的距離を検出すると不合格状態信号を制御器500に供給するように構成されることが可能である。そのような不合格状態は不注意で建造物から引き離される装置50から結果的に得られることが可能である。レーザの基本ユニット300とレーザヘッド200との間のエネルギーの伝送を中断するために、制御器500は適切な信号をレーザの基本ユニット300へと送ることによって不合格状態信号に応答するように構成されることが可能である。或る実施形態では、この伝送はレーザヘッド200が建造物の表面から1センチメートルよりも遠くになると中断されることが好ましい。この方式で、気体格納容器240が建造物に接触していない限りレーザ光が発射されないことを確実化するために装置50はセンサ250を利用することが可能である。或る実施形態では、センサ250は装置50が建造物に付けられているときに建造物の表面に接触する近接スイッチを有する。
【0087】
(レーザ操作システム(LMS))
・LMS:固定用メカニズムと位置決め用メカニズムの組み合わせ
或る実施形態では、レーザ操作システム100は加工される表面に該して平行の多関節
ロボット動作を与えるように建造物との関係でレーザヘッド200を正確かつ反復的に位置決めするようにはたらく。そのようにするために、レーザ操作システム100は加工される建造物に取り外し可能に固定されることが可能であり、その後、その表面付近でレーザヘッド200を正確に移動させることが可能である。図6Aおよび6Bは、取り外し可能に建造物へと連結されるように構成された固定用メカニズム110および固定用メカニズム110へと連結され、かつレーザヘッド200へと連結される位置決め用メカニズム121をレーザ操作システム100が有する実施形態の2つの反対側の立面図を概略的に例示している。或る実施形態では、レーザ操作システム100は輸送、保管、または保守管理のために都合良く解体および再組み立てされることが可能である。
【0088】
・固定用メカニズム
レーザ操作システム100の或る実施形態はレーザ操作システム100を加工される建造物へと取り外し可能に固定するための固定用メカニズム110を有する。固定用メカニズム110は取り外し可能に建造物へと連結されるように構成されることが可能であり、1つまたは複数の取り付けインターフェース111を有することが可能である。
【0089】
或る実施形態では、固定用メカニズム110は、居住可能な建造物内の表面に取り外し可能に結合される。あるそのような実施形態によって、居住可能な建造物内の表面を処理するために本装置を用い得ることが好都合である。或る実施形態では、固定用メカニズム110は、レーザ光が照射される表面に取り外し可能に結合される。あるそのような実施形態によって、居住可能な建造物の内または外の比較的狭い囲まれた空間内において、本装置を用い得ると好都合である。
【0090】
図6Bに概略的に例示される実施形態では、固定用メカニズム110は一対の取り付けインターフェース111を有する。各々の取り付けインターフェース111は少なくとも1つの弾力性真空パッド112、少なくとも1つのインターフェース装着用装置114、少なくとも1つの真空導管116、少なくとも1つの装着用コネクタ118、および固定用メカニズム110の取り付けインターフェース111を位置決め用メカニズム121へと連結するように構成されたカプラ119を有する。図6Aおよび6Bに概略的に例示される実施形態は2つの取り付けインターフェース111の各々について2つの真空パッド112を有するが、他の実施形態は取り付けインターフェース111と真空パッド112のどのような構成または数も利用する。
【0091】
図7で例示される実施形態では、2つの真空パッド112はインターフェース装着用装置114へと連結される。或る実施形態では、真空パッド112は円形のゴムパッドを有し、建造物の上に置かれるとそれが効率的に気密領域を形成する。各々の真空パッド112は真空導管116(例えばフレキシブルホース)を介して少なくとも1つの真空発生器(図示せず)へと流体連結される。真空発生器は真空を作り出すために流体のパワー(例えば圧縮空気)を使用することが可能であり、あるいは外部の真空供給源を使用することが可能である。真空発生器は真空導管116を介して真空パッド112と建造物の間の気密領域から空気を引き抜き、それにより、気密領域の中に真空を作り出す。真空パッド112を可逆的に建造物へと固定する力を大気圧が供給する。
【0092】
インターフェース装着用装置114は剛性の金属製支持体を有し、その上に真空パッド112、装着用コネクタ118、およびカプラ119が装着される。或る実施形態では、装着用コネクタ118は、下記でさらに充分に説明されるように地上支持システム700へと取り外し可能に取り付けられる地上支持コネクタ118aを有することが可能である。他の実施形態では、装着用コネクタ118は下記でさらに充分に説明されるように懸架を基本とする支持システム800へと取り外し可能に取り付けられるように構成された少なくとも1つの懸架を基本とする支持コネクタ118bを有することが可能である。カプ
ラ119はインターフェース装着用装置114を位置決め用メカニズム121へと取り外し可能に連結するように構成される。或る実施形態では、カプラ119は少なくとも1つの突起部を有し、それが位置決め用メカニズム121内の少なくとも1つの対応する凹部へと接続可能である。
【0093】
代替選択肢の実施形態では、固定用メカニズム110は装置50を加工される建造物に固定するための他の技術を含むことが可能である。これらの他の技術は、限定はされないがウィンチ、装置50または擬似タンクトレッドに固定された吸引装置(例えばカップ、gekkomat、スカート)、建造物から懸架された移動足場、および剛性の踏み台を含む。これらの技術は固定用メカニズム110の或る実施形態の中で互いに組み合わされて使用されることもやはり可能である。
【0094】
・位置決め用メカニズム
レーザ操作システム100の或る実施形態は、加工される建造物の近辺にある間にレーザヘッド200を正確に移動させるための位置決め用メカニズム121を有する。図8は固定用メカニズム110の取り付けインターフェース111と共に位置決め用メカニズム121の一実施形態の拡大図を概略的に例示している。図8の位置決め用メカニズム121は第1の軸方向位置決めシステム130、第2の軸方向位置決めシステム150、インターフェース140、およびレーザヘッド受容部220を有する。第1の軸方向位置決めシステム130は少なくとも1つのカプラ132によって取り外し可能に固定用メカニズム110の取り付けインターフェース111へと連結される。インターフェース140(図8の実施形態では第1の部分品140aと第2の部分品140bを有する)は第2の軸方向位置決めシステム150を第1の軸方向位置決めシステム130へと取り外し可能に連結する。レーザヘッド受容部220は第2の軸方向位置決めシステム150へと取り外し可能に連結され、レーザヘッド200のハウジング230へと取り外し可能に連結されるように構成される。
【0095】
或る実施形態では、第1の軸方向位置決めシステム130は固定用メカニズム110のカプラ119の少なくとも1つの対応する突起部へと取り外し可能に接続可能である凹部を有する少なくとも1つのカプラ132を有する。そのような実施形態は位置決め用メカニズム121の輸送、保管、または保守管理のために都合良く解体および再組み立てされる。他の実施形態は固定用メカニズム110に固定して連結された第1の軸方向位置決めシステム130を有することが可能である。
【0096】
或る実施形態では、第1の軸方向位置決めシステム130は建造物の表面と実質的に平行の第1の方向でレーザヘッド200を移動させる。図9で概略的に例示される実施形態では、第1の軸方向位置決めシステム130はさらに第1のレール134、第1の駆動部136、および第1のステージ138を有する。第1のステージ138は第1の駆動部136の影響下で移動可能なように第1のレール134へと連結される。インターフェース140の第1の部分品140aは、第1の駆動部136が第1のレール134に沿ってインターフェース140を移動させるために使用されることが可能となるように固定して第1のステージ138へと連結される。或る実施形態では、第1の軸方向位置決めシステム130はさらにセンサ、リミットスイッチ、または第1のレール134に沿った第1のステージ138の位置に関する情報を提供する他の装置を有する。この情報は、この情報に応答して第1の駆動部136またはレーザ操作システム100の他の部品へと制御信号を送信するように構成される制御器500へと供給されることが可能である。
【0097】
範例の第1の駆動部136は、限定はされないが水圧式駆動部、圧空式駆動部、電気機械式駆動部、ネジ式駆動部、およびベルト式駆動部を含む。本願明細書に述べられた実施形態に適合する第1のレール134、第1の駆動部136、および第1のステージ138
はHamel,MinnesotaのTol−O−Matic,Inc.社から入手可能である。第1のレール134、第1の駆動部136、および第1のステージ138の他のタイプおよび構成もやはり本願明細書に述べられた実施形態に適合する。
【0098】
或る実施形態では、第2の軸方向位置決めシステム150は建造物の表面と実質的に平行の第2の方向でレーザヘッド200を移動させる。或る実施形態では第2の方向は第1の軸方向位置決めシステム130の第1の方向に対して実質的に直角である。図10で概略的に例示される実施形態では、第2の軸方向位置決めシステム150は第2のレール152、第2の駆動部154、および第2のステージ156を有する。或る実施形態では第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150はレーザヘッド200の直線的な移動を提供する。他の実施形態では、第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150はレーザヘッド200の円形および軸方向の移動をそれぞれ提供する。
【0099】
或る実施形態では、第2のステージ156は第2の駆動部154の影響下で移動可能なように第2のレール152へと連結される。レーザヘッド受容部220は、第2の駆動部154が第2のレール152に沿ってレーザヘッド受容部220を移動させるために使用されることが可能となるように取り外し可能に第2のステージ156へと連結される。或る実施形態では、第2の軸方向位置決めシステム150はさらにセンサ、リミットスイッチ、または第2のレール152に沿った第2のステージ156の位置に関する情報を提供する他の装置を有する。この情報は、この情報に応答して第2の駆動部154またはレーザ操作システム100の他の部品へと制御信号を送信するように構成される制御器500へと供給されることが可能である。
【0100】
範例の第2の駆動部154は、限定はされないが水圧式駆動部、圧空式駆動部、電気機械式駆動部、ネジ式駆動部、およびベルト式駆動部を含む。本願明細書に述べられた実施形態に適合する第2のレール152、第2の駆動部154、および第2のステージ156はHamel,MinnesotaのTol−O−Matic,Inc.社から入手可能である。第2のレール152、第2の駆動部154、および第2のステージ156の他のタイプおよび構成もやはり本願明細書に述べられた実施形態に適合する。
【0101】
或る実施形態では、第2のレール152はインターフェース140の第2の部分品140bへと固定式に連結される。第2の部分品140bは、インターフェース140の第1の部分品140aの少なくとも1つの対応する突起部へと取り外し可能に接続可能である少なくとも1つの凹部を有することが可能である。そのような実施形態は位置決め用メカニズム121の輸送、保管、または保守管理のために都合良く解体および再組み立てされる。他の実施形態では、インターフェース140は第1のステージ138と第2のレール152のうちの一方または両方へと取り外し可能に連結される単一片で作製されることが可能である。他の実施形態は都合の良い解体のために構成されていない(例えば、単一片で作製されたインターフェース140を有し、それが第1のステージ138と第2のレール152の両方へと固定式に連結される)。
【0102】
或る実施形態では、インターフェース140は第1のレール134と第2のレール152の間の相対的配向を調節するための傾斜メカニズム144を有する。図11Aに概略的に例示されるように、インターフェース140の第1の部分品140aは第1のレール134上の第1のステージ138へと連結され、インターフェース140の第2の部分品140bの対応する凹部と結合するように構成された一対の隆起142を有する。傾斜メカニズム144は第1のプレート145、蝶番146、第2のプレート147、および一対の支持支柱148を有する。第1のプレート145は第1のステージ138に固定式に装着され、固定用メカニズム110が装着される表面に対して実質的に平行である。第2の
プレート147は蝶番146によって枢動するように第1のプレート145へと連結され、支持支柱148によって定位置にロックされることが可能である。
【0103】
図11Aでは、第1のプレート145および第2のプレート147が互いに実質的に平行になるように傾斜メカニズム144が構成される。この構成では、レーザヘッド200の第1の方向と第2の方向によって規定される運動の平面は固定用メカニズム110が連結される表面に対して実質的に平行である。図11Bでは、第2のプレート147が第1のプレート145に相対して非ゼロの角度(例えば90度)になるように傾斜メカニズム144が構成される。この構成では、レーザヘッド200の第1の方向と第2の方向によって規定される運動の平面は固定用メカニズム110が連結される表面に相対して非ゼロの角度である。
【0104】
或る実施形態では、レーザヘッド受容部220は取り外し可能にレーザヘッド200のハウジング230へと連結される。図12は本願明細書に述べられた実施形態に適合するレーザヘッド受容部220を概略的に例示している。レーザヘッド受容部220は第2のステージ156に連結され、解放可能なクランプ222および第3の軸方向位置決めシステム224を有する。クランプ222はレーザヘッド200のハウジング230を保持するように構成される。第3の軸方向位置決めシステム224はレーザヘッド200と加工される建造物との間の相対的距離を調節するように構成される。或る実施形態では、第3の軸方向位置決めシステム224はネジ式駆動部を有し、それがクランプ222を第2のレール152に対して実質的に直角方向に移動させる。或る実施形態では、図12で概略的に例示されるようにネジ式駆動部はクランプ222を移動させるために回されることが可能なハンドル226によって手動で動かされる。他の実施形態では、ネジ式駆動部は制御器500からの制御信号に応答して機器によって自動的に制御される。
【0105】
・地上支持システム
或る実施形態では、装置50は取り外し可能に装置50へと連結される地上支持システム700を伴って利用されることが可能である。インターフェース装着用装置114は各々、取り外し可能に地上支持システム700へと結合するように構成された地上支持コネクタ118aを有する。地上支持システム700は、市販入手可能な引き上げもしくは位置決めタイプのシステムといった様々なタイプの外部ブームシステムに付随することが有利であり、それが装置50の重量のいくらかを支え、それにより、固定用メカニズム110によって支えられる重量負荷を軽減することが可能である。地上支持システム700は実質的に垂直の表面(例えば壁)または実質的に水平の表面(例えば天井)への装置50の使用を容易にするために使用されることが可能である。
【0106】
或る実施形態では、地上支持システム700は図13に概略的に例示されるような支持構造体710を有する。図13の支持構造体710はブームコネクタ712、回転式取り付け台714、スプレッダ部材716、一対の主柱718、および一対の副柱720を有する。ブームコネクタ712は選択される外部ブームシステムに取り付けられるように構成される。回転式取り付け台714は回転可能なようにブームコネクタ712へと連結され、かつ固定式でスプレッダ部材716へと連結され、それにより、ブームコネクタ712が支持構造体710に相対して都合良く回されることが可能となる。
【0107】
主柱718はスプレッダ部材716へと連結され、実質的に互いに平行である。主柱718の各々はインターフェース装着用装置114の地上支持コネクタ118aのうちの1つに連結されるように構成される。主柱718は、地上支持コネクタ118aと位置合わせされるように様々な位置でスプレッダ部材716へと各々連結されることが可能である。各々の主柱718はまた、副柱720へも連結され、かつそれらに対して実質的に直角である。そのような実施形態では、地上支持コネクタ118aに連結された主柱718を
有するのではなく、副柱720が地上支持コネクタ118aに連結され、それにより、固定用メカニズム110に相対して90度で支持構造体710を効率的に回転させることが可能である。都合の良いことに、そのような実施形態は建造物の様々な構成を加工するため、および特定の用途に最適の代替選択肢の構成を可能にするための調節可能性を提供する。
【0108】
・懸架を基本とする支持システム
場合によっては、装置50は取り外し可能に装置50へと連結される懸架を基本とする支持システム800を伴って利用されることが可能である。インターフェース装着用装置114は各々、取り外し可能に懸架を基本とする支持システム800へと結合するように構成された少なくとも1つの懸架を基本とする支持コネクタ118bを有することが可能である。都合の良いことに懸架を基本とする支持システム800は装置50の重量のいくらかを支え、それにより、固定用メカニズム110によって支えられる重量負荷を軽減する。懸架を基本とする支持システム800は実質的に垂直の表面(例えば外壁)への装置50の使用を容易にするために使用されることが可能である。
【0109】
或る実施形態では、図14Aに概略的に例示されるように懸架を基本とする支持システム800はウィンチ810、一次ケーブル812、および一対の二次ケーブル814を有する。ウィンチ810は加工される建造物の屋根またはその他の部分に位置付けられる。ウィンチ810は一次ケーブル812に連結され、それが二次ケーブル814へと連結される。二次ケーブル814は各々、固定用メカニズム110のインターフェース装着用装置114の懸架を基本とする支持コネクタ118bへと連結される。図14Bは懸架装置を基本とする支持コネクタ118bを有する装置の実施形態を概略的に例示している。その後、装置50は一次ケーブル814の機能する長さを短くするかまたは長くするためにウィンチ810によって下げられるかまたは上げられることが可能である。代替選択肢の実施形態では、地上支持コネクタ118aが地上支持コネクタ118bとしてもまた機能するように構成されることが可能である。
【0110】
・LMS:単純化された固定用メカニズム
図21A〜図21Dは本願明細書に述べられた実施形態による別の固定用メカニズム1110を概略的に例示している。固定用メカニズム1110は取り外し可能に建造物へと連結されるように構成された弾力性の真空パッド1112、取り外し可能にレーザヘッド1200へと取り付けられるように構成されたカプラ1114、およびハンドル1116を有する。4つの真空パッドの固定用メカニズム110および多軸方向位置決め用メカニズム121を有する上述のレーザ操作システム100とは異なり、固定用メカニズム1110は照射される建造物との関係で選択された位置に図20のレーザヘッド1200を取り外し可能に保持するための単純化されたメカニズムを供給する。
【0111】
或る実施形態では、真空パッド1112は建造物上に設置されると気密領域を効率的に形成する円形のゴムの膜(図示せず)を有する。真空パッド1112は、図21Dに示す、真空導管1113を介して少なくとも1つの真空発生器(図示せず)へと流体連結される。真空導管1113の例示的材料には、限定はしないが、可撓性のあるゴムホースが含まれる。ゴム膜と建造物の間の気密領域から真空導管を介して空気を引き抜くことによって、真空発生器が気密領域の中に真空を作り出す。固定用メカニズム1110を可逆的に建造物へと固定する力を大気圧が供給する。ある実施形態では、真空パッド112は、レーザヘッド1200を、重力に逆らうどんな方向にも保持するように構成される。例えば、図21Dに概略を図示した実施形態では、固定用メカニズム1110は、実質的に垂直なコンクリートの表面と接触するようにレーザヘッド1200を支持する。表面からの固定用メカニズム1110の取り外しはゴム膜と建造物の間の気密領域の中に空気を戻すことを可能にすることによって達成される。本願明細書に述べられた実施形態に適合する真
空パッド1112は様々な供給源から入手可能である。範例の真空パッド1112はリヒテンシュタイン公国、SchaanのHilti Corporation社から得られる376281−DD−CR−1 Complete Core Rig Standによって供給される。
【0112】
或る実施形態では、カプラ1114はレーザヘッド1200の対応するレーザヘッドカプラ1250と嵌合する構造を有する。図21Aで概略的に例示される固定用メカニズム1110に関すると、カプラ1114は真空パッド1112に取り付けられる少なくとも1つの突起部1115を有する。カプラ1114は、少なくとも1つの対応する凹部1116を有するレーザヘッドカプラ1250へと接続可能である。他の実施形態では、カプラ1114が凹部を有し、レーザヘッドカプラ1250が対応する突起部を有する。なおも別の実施形態では、図22Aで概略的に例示されるようにカプラ1114はレーザヘッド2200を保持するように適合されるカラー1117を有する。
【0113】
図21Cで概略的に例示されるように、なおも別の実施形態ではコネクタ1114が少なくとも1つのロッド1118を有し、レーザヘッド1200のカプラ1250が少なくとも1つのカラー1119を有する。図21Cの範例の実施形態では、カプラ1114は2つのロッド1118a、1118bを有し、レーザヘッドカプラ1250は2つのカラー1119a、1119bを有する。各々のカラー1119は、レーザヘッド1200がロッド1118の長さに沿って様々な場所に調節可能に位置決めされることが可能になるように取り外し可能に対応するロッド1118へと連結される。或るそのような実施形態では、レーザヘッド1200がロッド1118の周りで回されることを可能にするためにカラー1119はロッド1118に関して調節可能に回されることが可能である。例えば、図21Cで概略的に例示される実施形態では、一方のカラー1119aはその対応するロッド1118aから取り外されることが可能であり、他方のカラー1119bはその対応するロッド1118bの周りで回されることが可能である。そのような実施形態はレーザヘッド1200をその穴明け位置から離す方向に回す能力を供給し、それにより、穴明けされている穴の目視検査が為されることが可能となる。いったん目視検査が為されたならば、その後、レーザヘッド1200を回転させ、カラー1119aをその対応するロッド1118aと再度連結することによってレーザヘッド1200が穴明け位置へと戻して動かされることが可能である。
【0114】
或る実施形態では、ハンドル1116は固定用メカニズム1110を所望の場所に移送し、位置決めすることを容易にするように構成される。図21A〜21Dで概略的に例示されるものに加えてさらに別のハンドル1116の構成も、本願明細書に述べられた他の実施形態と互換性がある。
【0115】
そのような単純化された固定用メカニズム1110は、上述のように、建造物に穴を開けるかまたは貫通するためだけに装置が使用されるときに使用されることが可能である。或るそのような実施形態では、建造物を照射して選択された場所に穴を開けるためにレーザヘッド1200が位置決めされるように固定用メカニズム1110が取り外し可能に建造物に固定されることが可能である。そのような実施形態で第2の選択された場所に第2の穴を開けるために、第2の選択された場所で建造物を照射するためにレーザヘッド1200が再配置されるように固定用メカニズム1110が建造物から取り外されて動かされる。固定用メカニズム1110を(図6A、6B、7、および8の固定用メカニズム110と比較して)単純化し、かつ位置決め用メカニズム121の使用を避けることによって、そのような単純化された実施形態は一人の個人によって移動可能かつ位置決め可能であるさらに軽い重量の代替選択肢を提供する。付け加えると、そのような単純化された実施形態は図6A、図6B、図7、および図8に関連して述べられたそれらよりもさらに頑丈である。
【0116】
(制御器)
或る実施形態では、制御器500はレーザの基本ユニット300へと電気的に連結され、制御信号をレーザの基本ユニット300に送信するように構成される。他の実施形態では、制御器500はレーザの基本ユニット300とレーザ操作システム100の両方へと電気的に連結され、制御信号をレーザの基本ユニット300とレーザ操作システム100の両方に送信するように構成される。図15は本願明細書に述べられた実施形態による制御器500の実施形態を概略的に例示している。制御器500は制御パネル510、マイクロプロセッサ520、レーザ発生器のインターフェース530、位置決めシステムのインターフェース540、センサのインターフェース550、およびユーザインターフェース560を有する。
【0117】
或る実施形態では、制御パネル510は主電源、主電源スイッチ、非常用電力遮断スイッチ、および制御器500のその他の部品類に連結されるように構成された様々な電気的コネクタを有する。制御パネル510は外部電源(図15に示さず)へと連結され、装置50の様々な部品に電力を供給するように構成される。
【0118】
或る実施形態では、マイクロプロセッサ520はプログラマブル論理制御器型マイクロプロセッサ(PLC)を含むことが可能である。PLCは丈夫で信頼性があり、かつ構成することが容易であり、範例のPLCはMilwaukee,WisconsinのRockwell Automation社、Palatine,IllinoisのSchneider Electric社、およびMunich,GermanyのSiemens AG社から入手可能である。代替選択肢の実施形態では、マイクロプロセッサ520はパーソナルコンピュータのマイクロプロセッサ、またはPCモジュールに内蔵されているPC/104を含み、それらは容易で自在性のある導入を提供する。マイクロプロセッサ520は、所望の切削もしくは穴明けパターンを達成するために、(レーザ発生器インターフェース530および位置決め用システムインターフェース540を介して)装置50のその他の部品へと制御信号を送信することによって(ユーザインターフェース560を介した)ユーザ、ならびに(センサインターフェース550を介した)装置50のセンサからの入力信号に応答するように構成されることが可能である。
【0119】
マイクロプロセッサ520はハードウェア、ソフトウェア、またはそれら2つの組み合わせの中に導入されることが可能である。ハードウェアとソフトウェアの組み合わせの中に導入されるとき、ソフトウェアはプロセッサで読み取り可能な記憶媒体上にあることが可能である。付け加えると、或る実施形態のマイクロプロセッサ520は動作中に使用される情報を保持するためのメモリを有する。
【0120】
或る実施形態では、レーザ発生器インターフェース530はレーザの基本ユニット300へと連結され、マイクロプロセッサ520からレーザの基本ユニット300の様々な部品へと制御信号を送信するように構成される。例えば、レーザ発生器インターフェース530は、限定はされないがレーザパワーの出力レベルおよびレーザパルスのプロファイルとタイミングを含めた所望の動作パラメータを設定するために制御信号をレーザ発生器310へと送信することが可能である。付け加えると、レーザ発生器インターフェース530は適切な冷却レベルを設定するために冷却用サブシステム320に制御信号を送信することが可能であり、圧縮ガスの供給源が気体格納容器240の圧縮ガス注入口249へ、または抽出ポート248に連結された真空発生器へとつながれる。
【0121】
或る実施形態では、位置決め用システムインターフェース540はレーザ操作システム100の位置決め用メカニズム121へと連結され、上述したような第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150と適合する。或るそのよう
な実施形態では、位置決め用システムインターフェース540は第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150用のサーボ駆動部を有する。このサーボ駆動部はマイクロプロセッサ520からの制御信号に応答して第1の駆動部136および第2の駆動部154のための駆動用の電圧と電流を発生することが好ましい。この方式で、制御器500はどのようにしてレーザヘッド200が建造物の表面を横切って走査されるかを決定することが可能である。或る実施形態では、サーボ駆動部は制御器500の制御パネル510から電力を受け取る。位置決め用メカニズム121が第3の軸方向位置決めシステムをさらに有する実施形態では、位置決め用システムインターフェース540は制御器500がレーザヘッド200と加工される建造物表面との間の相対的距離を判定することが可能となるように適切なサーボ駆動部をさらに有する。
【0122】
或る実施形態では、センサインターフェース550は装置50の様々なセンサ(図15に示さず)へと連結され、動作パラメータが選択もしくは修正されるときにそれらがデータを提供する。例えば、上述したようにレーザヘッド200はレーザヘッド200と相互作用領域との間の相対的距離を測定するように構成されたセンサ250を有することが可能である。そのような実施形態のセンサインターフェース550はセンサ250からデータを受け取り、このデータをマイクロプロセッサ520へと供給する。その後、マイクロプロセッサ520はレーザの基本ユニット300および/またはレーザ操作システム100の様々な動作パラメータを適切なときにリアルタイムで調節することが可能である。センサインターフェース550を介して制御器500へと連結されることが可能なその他のセンサは、限定はされないが加工される表面に相対してレーザヘッド200が定位置にあることを確認するための近接センサ、様々な冷却、圧縮空気、および真空システムのための温度または流量センサ、および(下記でさらに充分に説明されるような)鉄筋検出器を含む。
【0123】
或る実施形態では、ユーザインターフェース560は装置50に関する情報をユーザに提供し、ユーザの入力を受け取ってマイクロプロセッサ520へと送信するように適合される。或る実施形態では、ユーザインターフェース560は制御用ペンダント570を有し、それが電気的にマイクロプロセッサ520へと連結される。図16に概略的に例示されるように、或る実施形態では制御用ペンダント570は画面572および複数のボタン574を有する。或る他の実施形態では、制御用ペンダント570は、複数のボタン574を含み、画面572から独立している。
【0124】
画面572は状態情報および動作パラメータ情報をユーザに表示するために使用されることが可能である。範例の画面572は、限定はされないが液晶ディスプレイを含む。ボタン574は、装置50の動作パラメータを設定するためにマイクロプロセッサ520によって使用されるデータをユーザが入力することを可能にするために使用されることが可能である。他の実施形態は、限定はされないがキーボード、マウス、タッチパッド、およびポテンショメータのノブおよび/またはダイアルを含めたユーザの入力を装置50に伝達するための他の技術を使用することが可能である。或る実施形態では、制御用ペンダント570は装置50に配線で接続され、その一方で他の実施形態では、制御用ペンダント570は遠隔で(例えば無線で)装置50と通信する。
【0125】
或る実施形態では、制御用ペンダント570は非常用停止ボタンおよびサイクル停止ボタンをさらに有する。非常用停止ボタンを押すと、装置50はすべての動きを即座に中止し、レーザ照射が即座に中断される。サイクル停止ボタンを押すと、装置50は同様にすべての動きを中止し、実行される切削手順に対応するレーザ照射を中断するが、しかしその後、ユーザは切削手順の出発点に戻るか、あるいは切削手順が停止された地点で切削を再開する選択肢を与えられる。或る実施形態では、制御用ペンダント570は「デッドマンスイッチ」をさらに有し、これは装置50が実行するためにユーザによって手動で作動
させられなければならない。そのようなスイッチは、いずれかの人間が制御用ペンダント570を積極的に使用しないと装置50が動作しないことを確実化することによって安全の対策を提供する。
【0126】
図17A〜図17Hは制御用ペンダント570の範例の画面表示のセットを例示している。画面572の左側と右側に沿ったボタン574の各々の機能は装置50の動作モードに応じて決まる。画面表示の各々は現在の動作モードに関する関連情報と共にシステムの状態に関する情報を提供する。
【0127】
図17Aの「MAIN SCREEN」表示は「Machine Status」領域、「System Status」領域、および制御用ペンダント570のボタン574のいくつか、またはすべての機能に対応するラベル領域を有する。「Machine Status」領域は、装置50が行なっている事項およびユーザが次に行なうことが可能な事項を記述する文章メッセージを含む。「System Status」領域は装置50の動作モードを示すボックスを有する。図17Aで例示される範例では、装置は「保守管理モード」にある。「System Status」領域はまた、限定はされないが固定用システム110の真空パッド112、空気または真空の圧力、第1の軸方向位置決めシステム130、および第2の軸方向位置決めシステム150を含めた装置50の様々な構成要素の状態を示す複数の状態ボックスも含む。「System Status」領域はまた、レーザの基本ユニット300で感知される何らかの過ちがあるかどうかを表示する。或る実施形態では、構成要素の公称上の状態が対応する状態ボックスで緑色で示される。装置50の準備完了状態は、緑色で現れるシステムの状態ボックスすべてを有することによって例示される。もしもこれらの構成要素のうちの1つの状態が動作パラメータから外れていると、対応する状態ボックスが赤色で示され、システムのインターロックが有効化されて装置50の動作を阻止する。開始すると、システムのインターロックが有効化され、装置50の動作の前に解除されなければならない。「Machine Status」領域の文章メッセージは、装置50を動作パラメータの範囲内に置くためおよびシステムのインターロックを解除するために実行されるべき行動に関する情報を提供する。システムのインターロックすべてを解除すると、「Machine Status」領域は装置50が使用準備完了状態であることを表示するであろう。
【0128】
図17Bの「SELECT OPERATION SCREEN」表示は「Machine Status」領域、「System Status」領域、およびボタン574のいくつか、またはすべての機能に対応するラベル領域を有する。「System Status」領域は第1の軸方向位置決めシステム130(長軸と称される)および第2の軸方向位置決めシステム150(短軸と称される)に沿ったレーザヘッド200の位置に関する情報を含む。ボタン574のうちのいくつかは様々な動作を有効化するように構成される。例えば、4つのボタン574は図17Bに例示されるように4つの異なる動作、すなわち円を描く、突き通す、直線切削する、および表面にキー形成する動作を有効化するように構成される。
【0129】
図17Cは装置50の円形の動作に関する情報を与える「CIRCLE SETUP/OPERATION SCREEN」表示を示しており、加工される建造物の表面に円形のパターンを所望の深さに切り込むようにレーザヘッド200が円形に移動する。或る実施形態では、円形動作は「穿孔による穴明け」のために使用されることが可能であり、それにより、中まで同質の円形の芯が切られ、表面から取り除かれて円形の穴を残す。
【0130】
「Circle Status」領域は円形動作の状態に関する情報および対応する命令をユーザに提供する。第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150に沿ったレーザヘッド200の始動位置が「System Statu
s」領域の中で与えられる。「Circle Parameters」領域は、限定はされないが円形パターンの周りでの周回の数、直径、切り込みが実行される時間的期間、円形の周りでのレーザヘッド200の移動速度、およびレーザの基本ユニット(LBU)のプログラム番号を含めた円形パターンの切削に付随する様々なパラメータに関する情報を提供する。或る実施形態ではLBUのプログラム番号は、限定はされないがビームの焦点および強度を含めたレーザヘッド200の動作パラメータに対応する。
【0131】
或る実施形態では、様々なパラメータは画面572上のパラメータに触れることによって変えられることが可能であり、そうすると数字のキーパッドが画面572上に現れ、それにより、新たな値が入力されることが可能になる。各々のパラメータについて、「set point」の値は現在メモリにある値であって入力された最後の値に対応する。「status」の値は選択された現在の値に対応する。新たなパラメータ値を保存すると、「status」および「set point」の値は同じである。「Auto/Dry Run」と標示されたボタン574aを押す操作は、所望の動作を確認するためにレーザビームを作動させずにレーザヘッド200の円運動を始動させるであろう。「Cycle Start」と標示されたボタン574bを押す操作は、レーザヘッド200の運動とレーザビームの作動の両方を含めた円形パターンの切削を始動させるであろう。「Cycle Stop」と標示されたボタン574cを押す操作は、中止された地点から切削および運動を再開する選択肢を伴なって切削および運動を中止もしくは中断させるであろう。「Machine Reset」と標示されたボタン574dを押す操作は、装置50を中間状態に置くであろう。切削の完了後に「Next」と標示されたボタン574eを押す操作は、「SELECT OPERATION SCREEN」へと戻すであろう。
【0132】
図17Dは、装置50の突き抜き動作に関する情報を提供する「PIERCE SETUP/OPERATION SCREEN」表示を示しており、レーザヘッド200は加工される建造物の表面に所望の深さの穴を開ける。「Pierce Status」領域は突き抜き動作の状態に関する情報および対応する命令をユーザに提供する。第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150に沿ったレーザヘッド200の始動位置が「System Status」領域の中で与えられる。「Pierce Parameters」領域は穴明けに付随する様々なパラメータに関する情報を提供する。レーザのパラメータは、限定はされないがレーザのパワー、レーザのスポットサイズ、および穴明けのための時間的期間(これらの各々は建造物に形成される結果の穴の直径を左右することが可能である)、およびLBUのプログラム番号を含む。これらのパラメータは上述のように変えられることが可能である。「Auto/Dry Run」、「Cycle Start」、「Cycle Stop」、「Machine Reset」、および「Next」と標示されたボタン574は上述されたように動作する。
【0133】
図17Eは、装置50の直線切削動作に関する情報を提供する「CUT SETUP/OPERATION SCREEN」表示を示しており、レーザヘッド200は加工される建造物の表面で所望の深さに直線切削を行なう。直線切削は装置50の軸のうちの1つに沿っていることが好ましい。「Cut Status」領域は切削動作の状態に関する情報および対応する命令をユーザに提供する。第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150に沿ったレーザヘッド200の始動位置が「System Status」領域の中で与えられる。「Cut Parameters」領域は、限定はされないがレーザヘッド200の移動速度、行なわれる切削の長さ、およびLBUのプログラム番号を含めた切削に付随する様々なパラメータに関する情報を提供する。これらのパラメータは上述のように変えられることが可能である。「Long Axis」および「Short Axis」と標示されたボタン574f、574gはレーザ
ヘッド200の移動の軸として第1の軸または第2の軸のそれぞれどちらかを選択するために使用される。「Auto/Dry Run」、「Cycle Start」、「Cycle Stop」、「Machine Reset」、および「Next」と標示されたボタン574は上述されたように動作する。
【0134】
図17Fは、装置50の表面キー形成動作に関する情報を提供する「SURFACE KEYING SETUP/OPERATION SCREEN」表示を示しており、レーザヘッド200は加工される建造物の表面に欠刻または楔キーを切削する。表面キー形成動作は所望の深さでかつ概して長方形の領域で表面に欠刻または「楔キー」を作製するために表面を横切ってレーザビームを走査させる工程を含む。或る実施形態では、表面キー形成動作は表面の「荒仕上げ」を行なうために使用されることが可能であり、それにより、表面は領域(例えば長方形)を横切るレーザビームとの相互作用によって粗面にされる。
【0135】
「Surface Keyjng Status」領域は表面キー形成動作の状態に関する情報および対応する命令をユーザに提供する。第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150に沿ったレーザヘッド200の始動位置が「System Status」領域の中で与えられる。「Surface Keying
Parameters」領域は、限定はされないがレーザヘッド200の移動速度、第1の軸および第2の軸に沿って作られるキーの長さ、装置50が第1の軸および第2の軸に沿った移動の間で増加させるであろうオフセットの長さ、およびLBUのプログラム番号を含めた切削に付随する様々なパラメータに関する情報を提供する。これらのパラメータは上述のように変えられることが可能である。「Long Axis」および「Short Axis」と標示されたボタン574f、574gはレーザヘッド200の移動の軸として第1の軸または第2の軸のそれぞれどちらかを選択するために使用される。「Auto/Dry Run」、「Cycle Start」、「Cycle Stop」、「Machine Reset」、および「Next」と標示されたボタン574は上述されたように動作する。
【0136】
図17Gは、検出された動作の過ちに関する情報を提供する「FAULT SCREEN」を示している。過ちは、モニタされるシステムのセンサ(例えば流量計、温度センサ、安全スイッチ、非常停止器)が非動作状態を検出すると発生し、装置50がいずれかの動作モードにあるとき、およびいずれかの画面が表示されているときに生じることが可能である。過ちが生じると、表示されている現在の画面の下端に過ちを表示するスクローリングメッセージが与えられることが好ましい。付け加えると、「Machine Status」領域は過ちを取り除くようにユーザに表示するであろう。「FAULT SCREEN」は適切なボタン574を押すことによって他の画面のいずれからもアクセスされることが可能である。図17Gに例示されるように、或る実施形態では「FAULT SCREEN」は検出された過ちを、限定はされないが日付けおよび過ちのタイプを含めた関連データを備えた一覧表で表示する。運転のために装置50を準備するために、検出された過ちがユーザによって取り除かれることが好ましい。検出された過ちを取り除いた後、ユーザは適切なボタン574(例えば「Acknowledge All」)を押して過ちに肯定応答することが可能である。もしも過ちが取り除かれなければ、ユーザは適切なボタン574(例えば「Machine Reset」)を押して過ちが生じたときに表示された画面に戻ることが可能である。再度「Machine Reset」ボタン574を押す操作がユーザを「MAIN SCREEN」に戻し、そこで装置50はリセットされることが可能である。
【0137】
図17Hは、装置50に関する情報を提供する「MAINTENANCE SCREEN」表示を示している。保守管理モードは「MAIN SCREEN」表示から適切なボ
タン574を押すことによってアクセスされることが可能である。保守管理モードでは、システムのインターロックがバイパスされ、したがって、ユーザは装置50あるいは装置50の近くの人間もしくは材料を傷つけることを避けるように特別の配慮を実行することが好ましい。「MAINTENANCE SCREEN」は適切な警告をユーザに表示することが可能である。
【0138】
保守管理モードは、装置50の過ちの状態に関係なく、装置50の様々な構成要素の動作をチェックする機会をユーザに提供する。例えば、保守管理モードで適切なボタン574を押すことによって真空システムがオンおよびオフに切り換えられることが可能であり、圧縮空気がソレノイドバルブを介してオンおよびオフに切り換えられることが可能であり、第1の駆動部136および第2の駆動部154がオンおよびオフに切り換えられることが可能である。付け加えると、第1の軸および第2の軸の初期設定走行スピードは、上述したように画面572を押して数字キーパッド表示を出現させることによって変えられることが可能である。
【0139】
「System Status」領域はまた、限定はされないが固定用システム110の真空パッド112、空気または真空の圧力、第1の軸方向位置決めシステム130、および第2の軸方向位置決めシステム150を含めた装置50の様々な構成要素の状態を示す複数の状態ボックスも含む。「System Status」領域はまた、レーザの基本ユニット300で感知される何らかの過ちがあるかどうかを表示する。或る実施形態では、構成要素の公称上の状態が対応する状態ボックスで緑色で示される。装置50の準備完了状態は、緑色で現れるシステムの状態ボックスすべてを有することによって例示される。もしもこれらの構成要素のうちの1つの状態が動作パラメータから外れていると、対応する状態ボックスが赤色で示される。
【0140】
「MAINTENANCE SCREEN」はまた、レーザヘッド200を第1の軸および第2の軸に沿って望み通りに移動させる能力も提供する。3つのボタン574のセットが第1の軸に沿ってレーザヘッド200をホームポジション、前方向、または後ろ方向へとそれぞれ移動させるように構成される。同様に、3つのボタン574の別のセットが第2の軸に沿ったレーザヘッド200の同様の移動のために構成される。ボタンのこれらのセットのための標示領域はこれら2つの軸に沿ったレーザヘッド200の位置に関する情報を含むことが可能である。
【0141】
(検出器)
或る実施形態では、制御器500は建造物を加工している間に建造物の中に埋め込まれた材料を検出し、かつ検出信号を制御器500へと送信するように構成された検出器600へと連結される。或る実施形態では、制御器500は適切な制御信号をレーザの基本ユニット300へ、またはレーザの基本ユニット300およびレーザ操作システム100の両方へと送信することによって、埋め込まれた材料を大幅に傷つけることを回避するように構成される。或る実施形態では、検出器600は加工中に相互作用領域から発射される光を利用して埋め込まれた材料を検出するように構成される。
【0142】
埋め込まれた材料を検出するための様々な技術が本願明細書に述べられた実施形態に適合する。加工中に相互作用領域から発射される光のスペクトル分析は相互作用領域内の物質の化学組成に関する情報を提供することが可能である。光の波長および/または強度を分析することによって、加熱された物質の組成およびその温度を判定することが可能である。分光学的情報を使用すると、或る実施形態では埋め込まれた材料の検出は加工中の光スペクトルの変化のモニタリングに依存する。埋め込まれた材料、限定ではないが例を挙げるとコンクリートに埋め込まれた鉄筋(例えばスチール)のような材料の組成の違いでもって、様々な物質に関する融点および沸点のばらつきは埋め込まれた材料にレーザ光が
衝突して加熱するときの光の量および/または光の波長に気付くことが可能な変化を作り出すであろう。
【0143】
図18Aは本願明細書に述べられた実施形態に適合する検出器600を概略的に例示している。検出器600は光線平行化レンズ610、光ファイバ620、および分光器630を有する。或る実施形態の分光器630は入り口スリット631、光学グレーティング632、集光レンズ633、および光センサ634を有する。光線平行化レンズ610は相互作用領域から発射される光を受け取り、その光を光ファイバ620へと方向付けるように位置決めされる。その後、光ファイバ620がその光を分光器630に供給し、光は入り口スリット631を通って分光器630の光学グレーティング632へと送られる。光学グレーティング632は光を波長のスペクトルへと分離する。選択された波長範囲を有する分離された光はその後、集光レンズ633を通じて光センサ634上に方向付けられ、それがその波長範囲の光の強度に対応する信号を発生する。
【0144】
或る実施形態では、検出器600の少なくとも一部分はレーザヘッド200上に装着される。光線平行化レンズ610がレーザヘッド200の一部である実施形態では、相互作用領域から出る光を受け取るように光線平行化レンズ610は発射レーザ光の軸の近くに位置決めされることが可能である。そのような実施形態では、光線平行化レンズ610はノズル244の背後にあって窓243のように圧縮空気注入口249から入る圧縮空気によって保護されることが可能である。或る実施形態では光線平行化レンズ610はレーザビームと同軸であり、その一方で他の実施形態では、光線平行化レンズ610は軸から外れて配置される。限定はされないが、範例の光線平行化レンズ610はDunedin,FloridaのOcean Optics社から入手されるUV−74を含む。
【0145】
或る実施形態では、光ファイバ620はレーザヘッド200から分光器630へと送られる光の充分に低い減衰を提供するように選択された材料を含む。光ファイバ620のための範例の材料は、限定はされないがシリカおよび石英ガラスを含む。或る実施形態では、光ファイバ620は純石英ガラスのコア、ドープされた石英ガラスのクラッド層、およびポリイミドのバッファコーティングを有する。付け加えると、或る実施形態の光ファイバ620は外側ジャケット(例えばTeflon(登録商標)、Tefzel(登録商標)、Kevlar(登録商標)、およびそれらの組み合わせ)およびステンレススチールの外殻によって保護される。付け加えると、或る実施形態の光ファイバ620は直角を成すファイバ取り付け台を使用してレーザヘッド200へと接続可能である。他のタイプの光ファイバ620と取り付け台の構成が本願明細書に述べられた実施形態に適合する。範例の光ファイバ620は、限定はされないがDunedin,FloridaのOcean Optics社から入手されるP400−2−UV/VISを含む。
【0146】
或る実施形態では、分光器630は調節可能な入り口スリット631を有する。或る実施形態の入り口スリット631は約1ミリメートルの高さ、および約5ミクロンと約200ミクロンの間の範囲の幅を有する。入り口スリット631は分光器630に入る光の量を決定する。入り口スリット631の幅は光センサ634の解像度に影響を与える。例えば、或る実施形態では、約5ミクロンの入り口スリットの幅は約3画素の解像度に相当し、約200ミクロンの入り口スリットの幅は約24画素の解像度に相当する。入り口スリット631の幅は充分な光の透過ならびに充分な解像度を供給するように選択されることが好都合である。
【0147】
或る実施形態の光学グレーティング632は入り口スリット631から光を受け取り、光の様々な波長成分を光の波長に応じて決まる対応する角度で屈折させる。この方式で、光学グレーティング632は光の様々な波長成分を分離する。或る実施形態では、光学グレーティング632と入り口スリット631から入る光との間の角度が(例えば光学グレ
ーティング632を移動させることによって)走査され、それにより、光センサ634に到達する波長成分を走査する。光学グレーティング632を利用する範例の分光器630は、限定はされないがDunedin,FloridaのOcean Optics社から入手されるUSB2000(VIS/UV)を含む。
【0148】
或る実施形態では、分光器630の集光レンズ633は光センサ634の受光効率を高めるように構成される。或る実施形態では、集光レンズ633は光センサ634上に固定された円筒状レンズを含む。集光レンズ633のそのような実施形態は都合の良いことに大口径の(入り口スリット631の幅または光ファイバ620のサイズによって制限される)入り口開口および低い光レベルの用途で有用である。付け加えると、或る実施形態では、集光レンズ633は光センサ634に到達する迷光の量を減らすことによって分光器630の効率を高める。入り口スリット631、光学グレーティング632、および集光レンズ633の他の構成を伴った他の分光器630が本願明細書に述べられた実施形態に適合する。
【0149】
或る実施形態では、検出システム600は図18Bで概略的に例示されるように分光器630に連結されたコンピュータシステム640を有する。コンピュータシステム640は結果的に得られる分光データを分析するように構成される。或る実施形態のコンピュータシステム640はマイクロプロセッサ641、メモリサブシステム642、およびディスプレイ643を有する。コンピュータシステム640にさらに堅牢性を与えるために、マイクロプロセッサ641およびメモリサブシステム642は、アクセスを容易にするように筐体の1つまたは複数の側板に入力と出力のパワーおよび信号の接続部を備えたNational Electrical Manufacturers Association(NEMA)定格の筐体644の中に装着されることが可能である。或る実施形態ではコンピュータシステム640は壁コンセントから110Vで電力供給され、その一方で或る実施形態では、停電の事態に機能を保証するためにコンピュータシステム630はバッテリーバックアップ用電源(図示せず)をさらに有する。
【0150】
或る実施形態ではマイクロプロセッサ641はPentium−200マイクロプロセッサチップを含み、その一方で他の実施形態では、マイクロプロセッサ641はPentium−III、850MHzのマイクロプロセッサチップを含む。或る実施形態では、メモリサブシステム642はハードディスクドライブを含む。他のタイプのマイクロプロセッサ641およびメモリサブシステム642が本願明細書に述べられた実施形態に適合する。
【0151】
或る実施形態では、ディスプレイ643は薄膜トランジスタ(TFT)のタッチスクリーン型ディスプレイを含む。分光学的結果をユーザに表示するために使用されることに加えて、そのようなタッチスクリーン型ディスプレイは様々な動作パラメータを変えるために検出器600への入力をユーザに提供するために使用されることが可能である。
【0152】
分光器630は建造物内の様々な埋め込まれた材料に付随する特定の波長をモニタすることが可能である。或る実施形態では、分光器630は光の相対的強度をこれらの波長で、またはこれらの波長に近いスペクトル領域でモニタすることが可能である。付け加えると、分光器630に到達する光を削減してスペクトル分析性能を向上させるために少なくとも1つの減光フィルタが使用されることが可能である。
【0153】
或る実施形態では、分光器630は特定の波長の強度およびこの波長の両側での強度をモニタする。或る実施形態の分光器630は開けられる穴の増大する深さから結果的に生じる強度の減少もやはりモニタする。図19はコンクリートをレーザ光で照射して検出される波長の光スペクトルおよび埋め込まれた鉄筋を照射して検出される光スペクトルの範
例のグラフを示している。コンクリートからのスペクトルは約592ナノメートルの波長に発光ピークを示している。鉄筋からのスペクトルはこの発光ピークを有さず、代わりにほぼ同じ波長に吸収による深い落ち込みを示している。したがって、埋め込まれた鉄筋がレーザ光で切削されているかどうかのリアルタイムの表示を与えるために約592ナノメートルの発光スペクトルが使用されることが可能である。例えば、約588.5ナノメートル、592ナノメートル、および593ナノメートルの発光スペクトルをサンプリングし、比(2×I592)/(I593+I588.5)を計算することによって592ナノメートルのスペクトルに谷またはピークのどちらが存在するかを検出器600が推定する実施形態では、検出器600は発光スペクトルがコンクリートに対応する落ち込みを有するか、または埋め込まれた鉄筋に対応するピークを有するか判定することが可能である。他の分光学的データが他の実施形態に使用されることが可能である。
【0154】
或る実施形態では、検出器600は上限カットオフ波長(例えば582ナノメートル)と下限カットオフ波長(例えば600ナノメートル)によって規定されるスペクトル領域を検査し、埋め込まれた鉄筋の検出または非検出のスペクトル比R特性を判定する。図23は本願明細書に述べられた実施形態によるスペクトル比Rを判定するための範例の方法2500のフローチャートである。方法2500は穴が深くなるときの相互作用領域からの光の変化に対処していない。
【0155】
或る実施形態では、方法2500はスペクトル領域の中のデータが選択された振幅範囲と比較される操作ブロック2510を有する。もしもいずれかのデータがその振幅範囲の外側に外れると、そのスペクトルは埋め込まれた鉄筋の非検出に相当すると見なされる。
【0156】
或る実施形態では、方法2500は谷および2つのピークの存在を判定するようにスペクトル領域のデータを分析する工程をさらに含む。或る実施形態では、この分析はスペクトル領域のデータが谷を含むかどうかを操作ブロック2520で判定する工程を含む。もしも谷が存在すると判定されると、操作ブロック2530で谷の値Vが計算され、そのスペクトル領域のデータが2つのピークを含むかどうかを判定するために操作ブロック2540でスペクトル領域が分析される。或る実施形態では、谷の値Vは谷のデータの振幅に相当する。或る実施形態では、谷の値Vを計算する工程はスペクトル領域の第1の部分でのデータの最小値を判定する工程を含む。或る実施形態では、スペクトル領域の第1の部分は約588ナノメートルと約594ナノメートルの間の波長範囲に相当する。
【0157】
もしもスペクトル領域のデータが2つのピークを含むと判定されると、操作ブロック2550でピークの値Pが計算され、操作ブロック2560で谷の値Vをピークの値Pで除算することによってスペクトル比Rが計算される。或る実施形態では、ピークの値Pは2つのピークの値を平均化することによって計算される。もしもスペクトル比Rが1以上であれば、そのスペクトルは埋め込まれた鉄筋の検出に相当すると見なされる。
【0158】
もしもスペクトル領域のデータが2つのピークを含まないと判定されると、或る実施形態では操作ブロック2570で第1の極大値M1がスペクトル領域の第2の部分のデータから計算され、操作ブロック2580で第2の極大値M2がスペクトル領域の第3の部分から計算される。或る実施形態では、スペクトル領域の第2の部分は約582ナノメートルから約588ナノメートルの波長範囲に相当し、スペクトル領域の第3の部分は約594ナノメートルから約600ナノメートルの波長範囲に相当する。或る実施形態では、第1の極大値M1はスペクトル領域の第2の部分の中の最大のデータ振幅に相当し、第2の極大値M2はスペクトル領域の第3の部分の中の最大のデータ振幅に相当する。或る実施形態では、ピークの値Pは操作ブロック2590で第1の極大値M1と第2の極大値M2を平均化することによって計算される。そのような実施形態では、スペクトル比Rは操作ブロック2600で谷の値Vをピークの値Pで除算することによって計算される。もしも
スペクトル比Rが1以上であれば、そのスペクトルは埋め込まれた鉄筋の検出に相当すると見なされる。
【0159】
もしもスペクトル領域のデータに谷が存在しないと判定されると、操作ブロック2610でピークの値P’が計算され、操作ブロック2620でピークの値P’が予め決められた閾値Tと比較される。スペクトル領域が1つまたは複数のピークを有する或る実施形態では、ピークの値P’を計算する工程はスペクトル領域内で検出されたいずれかのピークの強度値を平均化する工程を含む。もしもピークの値P’が閾値Tよりも小さい場合、スペクトルは埋め込まれた鉄筋の検出に相当すると見なされる。
【0160】
埋め込まれた材料を検出するための代替選択肢の技術は高速シャッタによるモニタリングを使用する。この取り組み方は加工される材料とレーザ光の間の相互作用の個別の変化をモニタするために結合静電容量形放電(Coupled Capacitance Discharge(CCD))カメラシステムの進歩を利用する。さらに新しいCCDカメラは時間を短縮することが可能なシステムを有し、シャッタは約0.0001秒で開く。このスピードで、レーザ光と加工される材料の間の相互作用の多くの特徴を見ることが可能である。付け加えると、レーザ光と加工される材料の白熱する相互作用から観察される輝きを削減し、相互作用をさらに良好に画像化するために減光フィルタが使用されることが可能である。
【0161】
本願明細書に開示された様々な実施形態の数多くの代替例、改造例、および変形例が当業者に明らかであろうが、それらはすべて本発明の精神および範囲の中にあると予想され、かつ意図される。例えば、特定の実施形態が詳細に述べられてきたけれども、様々なタイプの置き換えおよび/または追加あるいは代替の材料、素子の相対的配列、および寸法の構成を組み入れるために前述の実施形態および変形例が改造され得ることを当業者は理解するであろう。したがって、たとえ本発明のわずかの変形例しか本願明細書に述べられていないとしても、そのような追加的な改造例および変形例および同等例が添付の特許請求項に規定されるような本発明の精神および範囲の中にあることは理解されるべきである。
【0162】
添付の特許請求項の中のすべての手段もしくは工程に機能素子を加えたものの相当する構造、材料、作用、および同等例は、特に権利主張されるように他の権利主張される要素との組み合わせで機能を実行するためのいずれの構造、材料、または作用も含むと意図される。
【図面の簡単な説明】
【0163】
【図1】建造物の表面を加工するための装置の実施形態を例示する概略図である。
【図2】本願明細書に述べられた実施形態に適合するレーザの基本ユニットを例示する概略図である。
【図3A】本願明細書に述べられた実施形態によるレーザヘッドを例示する概略図である。
【図3B】レーザヘッドの2つの代替選択肢の実施形態を例示する概略図である。
【図3C】レーザヘッドの2つの代替選択肢の実施形態を例示する概略図である。
【図4】本願明細書に述べられた実施形態による気体格納容器の断面を例示する概略図である。
【図5】レーザヘッドと相互作用領域の間の相対距離を測定するように構成されたセンサを有するレーザヘッドを例示する概略図である。
【図6A】レーザ操作システムが、取り外し可能に建造物へと連結されるように構成された固定用メカニズムおよび固定用メカニズムへと連結され、かつレーザヘッドへと連結される位置決め用メカニズムを有する実施形態を概略的に例示する立面図である。
【図6B】レーザ操作システムが、取り外し可能に建造物へと連結されるように構成された固定用メカニズムおよび固定用メカニズムへと連結され、かつレーザヘッドへと連結される位置決め用メカニズムを有する実施形態を概略的に例示する反対側の立面図である。
【図7】固定用メカニズムの取り付けインターフェースの実施形態を例示する概略図である。
【図8】固定用メカニズムの取り付けインターフェースと共に位置決め用メカニズムの一実施形態を概略で例示する拡大図である。
【図9】第1の軸の位置決めシステムの実施形態を例示する概略図である。
【図10】第2の軸の位置決めシステムの実施形態を例示する概略図である。
【図11A】1つの代替選択肢の構造でインターフェースの実施形態を例示する概略図である。
【図11B】1つの代替選択肢の構造でインターフェースの実施形態を例示する概略図である。
【図12】レーザヘッド受容部の実施形態を例示する概略図である。
【図13】装置の他の部品に連結された支持構造体の実施形態を例示する概略図である。
【図14A】装置に連結され、懸架装置を基本とする支持システムの実施形態を例示する概略図である。
【図14B】懸架装置を基本とする支持コネクタを有する装置の実施形態を例示する概略図である。
【図15】制御パネル、マイクロプロセッサ、レーザ発生器のインターフェース、位置決めシステムのインターフェース、センサのインターフェース、およびユーザインターフェースを有する制御器の実施形態を例示する概略図である。
【図16】画面および複数のボタンを有する制御用ペンダントを例示する概略図である。
【図17A】制御用付属物の範例の「MAIN SCREEN」表示を例示する概略図である。
【図17B】制御用付属物の範例の「SELECT OPERATION SCREEN」表示を例示する概略図である。
【図17C】制御用付属物の範例の「CIRCLE SETUP/OPERATION SCREEN」表示を例示する概略図である。
【図17D】制御用付属物の範例の「PIERCE SETUP/OPERATION SCREEN」表示を例示する概略図である。
【図17E】制御用付属物の範例の「CUT SETUP/OPERATION SCREEN」表示を例示する概略図である。
【図17F】制御用付属物の範例の「SURFACE KEYING SETUP/OPERATION SCREEN」表示を例示する概略図である。
【図17G】制御用付属物の範例の「FAULT SCREEN」表示を例示する概略図である。
【図17H】制御用付属物の範例の「MAINTENANCE SCREEN」表示を例示する概略図である。
【図18A】本願明細書に述べられた実施形態に適合する検出器を例示する概略図である。
【図18B】結果として得られる分光学的データを分析するように構成されたコンピュータシステムを例示する概略図である。
【図19】コンクリートをレーザ光で照射して検出される波長の光スペクトルおよび埋め込まれた鉄筋を伴うコンクリートを照射して検出される光スペクトルを示すグラフである。
【図20】本願明細書に述べられた実施形態によるレーザヘッドの例示的な小型の構造を例示する概略図である。
【図21A】本願明細書に述べられた実施形態による種々の固定用メカニズムを例示する概略図である。
【図21B】本願明細書に述べられた実施形態による種々の固定用メカニズムを例示する概略図である。
【図21C】本願明細書に述べられた実施形態による種々の固定用メカニズムを例示する概略図である。
【図21D】本願明細書に述べられた実施形態によるレーザヘッドおよび固定用メカニズムの例示的な小型構造を示す図である。
【図22A】本願明細書に述べられた実施形態によるレーザヘッドの軽量構造を示す概略図である。
【図22B】本願明細書に述べられた実施形態によるレーザヘッドおよび固定用メカニズムの別の例示的な軽量構造を示す図である。
【図22C】図22Bのレーザヘッドに結合された気体格納器を示す概略図である。
【図23】本願明細書に述べられた実施形態によるスペクトル比を測定するための例示的方法のフローチャートである。
【技術分野】
【0001】
優先権主張
本願は、2004年3月18日出願の米国特許出願第10/803,272号からの一部継続出願であって、当該米国特許出願は、2003年10月22日付出願の米国特許出願第10/690,983号の一部継続出願であり、当該出願は、2003年3月18日出願の米国仮特許出願第60/456,043号、2003年5月16日出願の米国仮特許出願第60/471,057号、2003年8月20日出願の米国仮特許出願第60/496,460号に対して、35U.S.C.§119(e)に基づく利益を主張しており、それらの各出願明細書は、参照によってその全体がここに組み込まれる。本願は、2004年8月16日出願の米国仮特許出願第60/601,816号に対して35U.S.C.§119(e)に基づく利益も主張し、当該出願明細書は、参照によってその全体がここに組み込まれる。
【0002】
関連出願
本願は、米国特許出願第10/690,833号、第10/690,975号、第10/691,481号および第10/691,444号に関連しており、それらの各出願は、2003年10月22日に出願されており、参照によってその全体がここに組み込まれる。本願はまた、米国特許出願第10/803,243号および第10/803,267号にも関連しており、それらの両方は、2004年3月18日付で出願されており、参照によって全体がここに組み込まれる。
【0003】
連邦政府による資金提供を受けた研究開発の記載
本発明は、ロバート・T・スタッフォード災害救助・緊急事態援助法(42U.S.C.§5121以下を参照)の一部として連邦緊急事態管理局から部分的に資金提供を受けた。
【0004】
発明の背景
発明の分野
本発明は材料を加工する分野、特に、エネルギー波を使用して材料を穴明け、切削、および表面加工するための装置および方法に関する。
【背景技術】
【0005】
広範囲の材料加工産業従事者は長い間、非破壊の材料加工の必要性を認識してきた。過去に、穴明け、切削、荒仕上げなどを含めた事実上すべての材料加工は数多くの破壊的な態様(例えば騒音、振動、粉塵、蒸気、および噴煙)を有してきた。材料加工は該して、穴明け、槌打ち、およびその他の動力の補助による方法のような機械的技術、およびウォータージェットに基づいた技術を含む。材料加工の課題の例証である米国特許第5,085,026号は極めて具体的に示している。026’の装置はコンクリートまたは他の石造建造物のような材料の機械による穴明けを必要とし、上記で言及したすべての破壊的態様を生じさせる。
【特許文献1】米国特許第5,085,026号
【発明の開示】
【課題を解決するための手段】
【0006】
ある実施形態では、装置が、居住可能な建造物の表面を加工する。本装置は、レーザの基本ユニットを備え、当該ユニットは、相互作用領域にレーザ光を供給するように適合されており、レーザ光が、建造物から材料を取り除く。レーザの基本ユニットは、レーザ発
生器と、当該レーザ発生器に結合されるレーザヘッドとを備える。レーザヘッドは、相互作用領域から材料を除去するように適合され、それにより、建造物内における活動に対する妨害が少なくなり得る。本装置は、レーザ操作システムをさらに備える。レーザ操作システムは、建造物に取り外し可能に結合されるように適合された固定用メカニズムを備える。レーザ操作システムは、固定用メカニズムに結合されかつレーザヘッドに結合される位置決めメカニズムをさらに備える。レーザ操作システムは、建造物に対するレーザヘッドの位置を制御可能に調節するように適合される。本装置は、レーザの基本ユニットおよびレーザ操作システムに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答してレーザの基本ユニットおよびレーザ操作システムに制御信号を送信するように適合されている。
【0007】
或る実施形態では、装置が、居住可能な建造物内における活動に対する妨害を減少させて建造物の表面を加工する。本装置は、レーザ光発生手段を備える。本装置は、建造物から材料を除去するように、レーザ光を建造物の相互作用領域に供給するための手段をさらに備える。本装置は、材料を閉じ込めて相互作用領域から除去するための手段をさらに備える。本装置は、建造物の表面に対する相互作用領域の位置を制御可能に調節する手段をさらに備える。本装置は、使用者の入力に応答してレーザ光および相互作用領域の位置を制御するための手段をさらに備える。
【0008】
ある実施形態では、居住可能な建造物の表面加工方法を、建造物内における活動に対する妨害を減少させて行う。本方法は、遠隔操作でレーザ光発生を行うステップを含む。本方法は、レーザ光が相互作用領域の建造物と相互作用して建造物から材料を除去するように、レーザ光を表面に供給するステップをさらに含む。本方法は、材料を閉じ込め相互作用領域から除去するステップをさらに含む。本方法は、建造物の表面に対する相互作用領域の位置を制御可能に調節するステップをさらに含む。本方法は、使用者の入力に応答して、レーザ光と、相互作用領域の位置とを制御するステップをさらに含む。
【0009】
ある実施形態では、装置が、居住可能な建造物の表面の加工を行う。本装置は、エネルギー波を相互作用領域に供給するように適合された基本ユニットを備え、当該エネルギー波が建造物から材料を除去する。基本ユニットは、発生器、および発生器に結合されるヘッドを備える。ヘッドは、相互作用領域から材料を除去するように適合され、それにより、建造物内における活動に対する妨害が減少する。本装置は、操作システムをさらに備える。操作システムは、建造物に取り外し可能に結合されるように適合された固定用メカニズムを備える。操作システムは、固定用メカニズムに結合されかつヘッドに結合される位置決めメカニズムをさらに備える。操作システムは、建造物に対するヘッドの位置を制御可能に調節するように適合される。本装置は、基本ユニットおよび操作システムに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答して制御信号を基本ユニットに送信するように適合される。
【0010】
ある実施形態では、装置が、居住可能な建造物の表面の加工を行う。本装置は、レーザ光を相互作用領域に供給するように適合されたレーザ基本ユニットを備え、当該レーザ光が、建造物から材料を除去する。レーザ基本ユニットは、レーザ発生器と、レーザ発生器に結合されるレーザヘッドとを備える。レーザヘッドは、相互作用領域から材料を除去するように適合され、それにより、建造物内における活動に対する妨害が減少し得る。本装置は、建造物に取り外し可能に結合されかつレーザヘッドに取り外し可能に結合されるように適合された固定用メカニズムをさらに備える。本装置は、レーザ基本ユニットに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答して制御信号をレーザ基本ユニットに送信するように適合される。
【0011】
ある実施形態では、装置で、居住可能な建造物内における活動に対する妨害を減少させ
て、建造物の表面加工を行う。本装置は、レーザ光発生手段を備える。本装置は、建造物から材料を除去するようにレーザ光を表面に供給する手段をさらに含む。本装置は、材料を閉じ込め相互作用領域から除去する手段をさらに含む。本装置は、使用者の入力に応答して、レーザ光を制御する手段をさらに含む。
【0012】
ある実施形態では、居住可能な建造物の表面加工方法を、建造物内における活動に対する妨害を減少させて行う。本方法は、遠隔操作でレーザ光発生を行うステップを含む。本方法は、レーザ光が相互作用領域の建造物と相互作用して建造物から材料を除去するように、レーザ光を表面に供給するステップをさらに含む。本方法は、材料を閉じ込め相互作用領域から除去するステップをさらに含む。本方法は、使用者の入力に応答して、レーザ光を制御するステップをさらに含む。
【0013】
ある実施形態では、装置が、居住可能な建造物の表面の加工を行う。本装置は、エネルギー波を相互作用領域に供給するように適合された基本ユニットを備え、当該エネルギー波が建造物から材料を除去する。基本ユニットは、発生器、および発生器に結合されるヘッドを備える。ヘッドは、相互作用領域から材料を除去するように適合され、それにより、建造物内における活動に対する妨害が減少し得る。本装置は、建造物に取り外し可能に結合されるように適合されかつヘッドに取り外し可能に結合される固定用メカニズムをさらに備える。本装置は、基本ユニットに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答して制御信号を基本ユニットに送信するように適合される。
【0014】
ある実施形態では、装置が、居住可能な建造物の表面の加工を行う。本装置は、レーザ光を相互作用領域に照射するレーザ基本ユニットを備え、当該レーザ光が、建造物から材料を除去する。レーザ基本ユニットは、レーザ発生器と、レーザ発生器に結合されるレーザヘッドとを備える。レーザヘッドは、材料を閉じ込め相互作用領域から除去する気体格納器を備える。気体格納器は、ゴム製シールを含み、当該シールは、建造物と接触し実質的に相互作用領域を囲むので、材料の閉じ込めおよび相互作用領域からの除去が促進され、建造物内における活動に対する妨害が少なくなり得る。本装置は、建造物に取り外し可能に結合されかつレーザヘッドに取り外し可能に結合される固定用メカニズムをさらに備える。本装置は、レーザ基本ユニットに電気的に接続された制御器をさらに備える。制御器は、使用者の入力に応答して制御信号をレーザ基本ユニットに送信する。
【0015】
或る実施形態では、装置が、居住可能な建造物内における活動に対する妨害を減少させて建造物の表面を加工する。本装置は、レーザ光発生手段を備える。本装置は、建造物から材料を除去するように、レーザ光を建造物の相互作用領域に供給するための手段をさらに備える。本装置は、材料を閉じ込めて相互作用領域から除去するための手段をさらに備える。閉じ込め手段は、相互作用領域を実質的に取り囲むゴム製シールを含む。本装置は、使用者の入力に応答してレーザ光を制御する手段をさらに備える。
【0016】
ある実施形態では、居住可能な建造物の表面加工方法を、建造物内における活動に対する妨害を減少させて行う。本方法は、遠隔操作でレーザ光発生を行うステップを含む。本方法は、レーザ光が相互作用領域の建造物と相互作用して建造物から材料を除去するように、レーザ光を表面に供給するステップをさらに含む。本方法は、材料を閉じ込め相互作用領域から除去するステップをさらに含む。材料は、相互作用領域を実質的に取り囲むゴム製シールにより閉じ込められる。本方法は、使用者の入力に応答して、レーザ光を制御するステップをさらに含む。
【0017】
本発明の概要を説明するために、本発明のある態様、利点、および新規な特徴を上に述べてきた。しかしながら、本発明の特定の実施形態によって、必ずしも全てのこのような利点が得られる訳ではないことが、理解される。したがって、本明細書に教示または示唆
した他の利点を必ずしも得られなくても、本明細書に教示した1つの利点または利点群を得られるかまたは最適化するように、本発明を実施または実行し得る。
【発明を実施するための最良の形態】
【0018】
権利主張される本発明の範囲を限定することなく、ここで図面および図表を参照する。
【0019】
材料加工の破壊的態様を削減することは長い間、材料加工産業、特に改築に共通するような居住中の建造物またはその近くでの材料加工を必要とする産業および多くの他の用途での従事者の目標であった。そのような長い間の切実な要求は、建造物の安全性を高めるために居住中の建造物を改装する効果的で経済的な手段に関して差し迫った必要性のある地球の地震活動地域で広く行き渡ってきた。
【0020】
先行技術は破壊的特徴による問題を抱えており、それにより、それらを居住中の建造物の改装に関して事実上不適切なものにする。付け加えると、そのような材料加工技術はしばしば危険で費用のかさむ「切り抜き」の危険性を呈する。「切り抜き」の危険性は、作業者が題材の材料をドリルで穴明けしているとき、中に埋め込まれている物体を不本意に切るといった事例を含む。例えば、既にあるコンクリートの壁に穴明けしている建築作業者が偶然に補強用スチールもしくは鉄筋、あるいは通電中の電線用導管もしくは導線といった埋め込まれたユーティリティに出くわすことがあり得る。そのような事故は結果として工具もしくは対象材料の高額の損傷、ならびに作業者にとってあり得る致命的な結末(例えば感電死)につながる可能性がある。従来式の穴明け法はまた、穴明けされる材料を予期せず突き抜き、建造物もしくは材料の反対側にいる作業者に損傷を与える「突き抜き」の危険性も含み得る。
【0021】
付け加えると、従来式の材料加工器具は操作することが極めて厄介であった。手持ち式の動力穴明け装置もしくは槌打ち装置は普通では50ポンドを超える重さがあり、しばしば長時間について作業者によって頭上で保持されることを要求される。従来式の装置はまた、通常では作業者が装置を保持しているときに吸収しなければならない振動力も発生する。潜在的に有害な振動力、持続する重量物持ち上げ、および「突き抜き」の危険性に加えて、作業者と装置の近くの人々は落下するかまたは飛び出す破片、ならびに粉塵、噴煙、蒸気、振動、および騒音に晒される可能性がある。不快な活性のこのレベルは該して居住中の建造物にとって不適切であり、騒音と振動が完全に受容不可能となり得る病院、研究室などとして使用される建造物にとって全く不適切である。
【0022】
必要とされ続けているが当該技術分野で欠落しているものは上記で例示された欠点を克服する非破壊的加工技術である。本願明細書で述べられる或る実施形態では、そのような欠点のいくつか、またはすべてを克服するために加工される表面にエネルギー波が向けられる。或る実施形態のエネルギー波は電磁波(例えばレーザ光、マイクロ波)であり、その一方で他の実施形態ではそれらは音波(例えば超音波)である。しかしながら、或る実施形態では、そのような切削ユニットは嵩張る可能性が高く、かつしばしば機械的相手方として操作することが難しい。レーザがコンクリートを切り抜くまたは突き抜く速度は、コンクリート中の骨材のタイプ、大きさ、集中度により異なり得る。付け加えると、レーザは上述されたような同じ「切り抜き」の危険性に陥りやすく、加工される材料のマトリクスの中に隠された物体が不注意で傷つけられる可能性が高い。レーザはまた、レーザビームの経路にある個人もしくは物体への危険性を伴う追加的な「突き抜き」の危険も引き起こしかねない。レーザはまた、穴あけされた材料を切削もしくは穴明けされた穴から取り除く処理に複雑さを呈する可能性が高い。或る実施形態では、レーザシステムは携帯型加工用ヘッドと連絡する遠隔レーザ発生器を組み入れ、それが多くの非破壊的でかつ安全性の特徴を組み入れることでシステムが居住中の建造物の内部または近辺で利用されることを可能にする。
【0023】
本発明の或る実施形態は先行技術の短所の多くに対処し、かつこれまで入手不可能であった恩典(例えば建造物内部での活動に対する減少した破壊性)を可能にしながらその一方で高速の材料加工を提供する。或る実施形態では、本方法および装置は騒音を発生し、嵩張り、かつ重い要素が実際の作業領域から大きく離れて動作することが可能となるように要素間のファイバ接続を利用する。或る実施形態は動作中の騒音と振動の両方で低く、かつ粉塵および破片を効率的に除去する。或る実施形態は「切り抜き」または「突き抜き」の危険を削減するための検出システムを有する。或る実施形態は材料加工時に作業者が作業領域から遠くに位置することを可能にすることによって作業者の安全を促進する。或る実施形態は人間が持ち運び可能な複数の部分品(例えば50ポンド未満)へと分離可能であり、加工される建造物の近辺もしくは中の場所への輸送を、容易かつ迅速な輸送性および据え付けを提供することによって容易にする。
【0024】
本発明の或る実施形態は、従来式の加工技術によって破壊される可能性のある壊れ易い建造物を加工するための方法および装置を提供する。例えば、改装もしくは改修加工の一部としてコンクリートの穀物貯蔵用サイロを加工するための従来式の鋸を使用する工程は結果として振動につながり、サイロの他の部分を傷つける可能性が高い。壊れ易い建造物を加工するためにレーザを使用する工程は加工中に建造物に為される横で生じる損傷を削減することが可能である。さらに、本願明細書で述べられる或る実施形態は容易に組み立て/解体され、それゆえに、それ以外の方法ではアクセス不可能な建造物の部分でそれらが使用されることが可能である。本願明細書に述べられる実施形態は人工建造物を加工する観点で開示されるが、なおも別の実施形態では本発明は自然の建造物(例えば採鉱または穴明け操作の一部として)加工するために有用である。
【0025】
本願明細書に述べられる方法および装置は当該技術の状況の大幅な進歩を表わす。本装置の様々な実施形態は複数の要素と方法の新しく斬新な配列を有し、それは独特でかつ新規的な方式で構成され、かつ以前は入手不可能であったが望ましい性能を示す。特に、本発明の或る実施形態は、静かで実質的に振動が無く、かつ粉塵、破片、または有害な噴煙を発散させにくい材料加工方法を提供する。付け加えると、或る実施形態は従来式の技術が行なうよりも高い速度の材料加工を可能にする。
【0026】
図面と結び付けて下記で述べられる詳細な説明は単に本発明の様々な実施形態の説明として意図されており、本発明が構築または利用される唯一の形式を表わすように意図されるものではない。本説明は本発明を導入する設計、機能、装置、および方法の具体例となる実施形態を記述する。しかしながら、異なる実施形態によって同じもしくは同等の機能および特徴が達成されることが可能であり、それらもやはり本発明の精神と範囲の中に包含されるように意図されることは理解されるべきである。
【0027】
図1は表面を有する建造物を加工するための装置50の実施形態を概略的に例示している。装置50はレーザの基本ユニット300、レーザ操作システム100、および制御器500を有する。レーザの基本ユニット300は相互作用領域にレーザ光を供給するように構成され、レーザ発生器310およびレーザ発生器310に連結されたレーザヘッド200を有する。レーザヘッド200は相互作用領域から材料物質を取り除くように構成される。レーザ操作システム100は取り外し可能に建造物へと連結されるように構成された固定用メカニズム110、および固定用メカニズム110へと連結され、かつレーザヘッド200へと連結された位置決め用メカニズム121を有する。レーザ操作システム100は建造物に相対してレーザヘッド200の位置を制御可能に調節するように構成される。制御器500は電気的にレーザの基本ユニット300およびレーザ操作システム100へと連結される。制御器500はユーザの入力に応答して制御信号をレーザの基本ユニット300およびレーザ操作システム100へと送信するように構成される。
【0028】
或る実施形態では、レーザヘッド200は取り外し可能にレーザ発生器310へと連結され、かつ取り外し可能に位置決め用メカニズム121へと連結される。或る実施形態では、位置決め用メカニズム121は取り外し可能に固定用メカニズム110へと連結され、制御器500は取り外し可能にレーザの基本ユニット300およびレーザ操作システム100へと連結される。そのような実施形態は、加工される建造物の付近もしくは中の場所への装置50の輸送を容易にするように可逆的に組み立ておよび解体されることが可能な装置50を提供することが可能である。
【0029】
(レーザの基本ユニット)
レーザの基本ユニット300の或る実施形態が下記で述べられる。下記でレーザの基本ユニット300は分離型の複数の部品を有するように述べられるが、他の実施形態はこれらの部品のうちの2つ以上の組み合わせを一体ユニットで有することが可能である。
【0030】
・レーザ発生器
図2は本願明細書に述べられた実施形態に適合するレーザの基本ユニット300を概略的に例示している。或る実施形態では、レーザの基本ユニット300はレーザ発生器310および冷却用サブシステム320を有する。レーザ発生器310は、レーザ発生器310に電力供給するために充分の適切な電圧、位相、およびアンペア数の電力を供給する電源(図示せず)へと連結される。この電源もやはり或る実施形態では持ち運び可能であり、冷却用の水、空気、または装置50が動作している施設からの電力を伴うことなく動作することが可能である。範例となる電源は、限定はされないがディーゼルを動力源とする発電機を含む。
【0031】
或る実施形態では、レーザ発生器310はアーク放電ランプで励起されるNd:YAGレーザを含むことが好ましいが、しかし場合によってはCO2レーザ、ダイオードレーザ、ダイオードで励起されるNd:YAGレーザ、ファイバレーザ、ディスクレーザまたは他のタイプのレーザシステムを含むことが可能である。レーザ発生器310はパルスモードまたは連続波モードのどちらかで動作させられることが可能である。本願明細書に述べられる実施形態による1つの範例のレーザ発生器310はDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能なTrumpf4006D、4000ワットの連続波レーザを含む。他の範例の実施形態では、Ybドープされたファイバレーザ、またはErドープされたファイバレーザが使用されることが可能である。他の出力パワー(例えば2000ワット)を備えた他のタイプのレーザが本願明細書に述べられる実施形態で互換性がある。本願明細書に述べられる方法および装置の所定の用途に特有の必要条件に応じて、当業者は当面の目的のために最適のレーザを選択することが可能であろう。
【0032】
或る実施形態では、レーザ発生器310は輸送および保管を容易にするために出荷用のコンテナの中に置かれることが可能である。レーザ発生器310は、ガラス光ファイバケーブルを通してレーザ発生器310から作業場所へと供給されることが好ましいレーザ光を発生する。
【0033】
或る代替選択肢の実施形態では、レーザ発生器310は気体ベースのCO2レーザを有し、これはCO2ガスの励起によってレーザ光を発生する。そのようなレーザは高い効率(例えば約5〜13%)で高出力パワー(例えば約100W〜50kW)を供給し、かつ相対的に安価である。そのような気体ベースのCO2レーザによって作り出されるレーザ光は通常ではミラーによって、および屈曲部もしくは隅の付近にレーザ光を供給するためのダクトもしくはアームのシステムを使用して供給される。
【0034】
或る代替選択肢の実施形態では、レーザ発生器310はダイオードレーザを有する。そのようなダイオードレーザは気体およびNd:YAGレーザに比べて小型であり、それゆえにそれらは直接供給構造で(例えば作業場所に近接して)使用されることが可能である。ダイオードレーザは高い電力効率(例えば約25〜40%)で高出力(例えば約10W〜6kW)を供給する。或る実施形態では、ダイオードレーザから出るレーザ光はいくらかの相当する出力の損失を伴うが光ファイバを経由して供給されることが可能である。
【0035】
Nd:YAGレーザを使用する実施形態はCO2レーザまたはダイオードレーザを伴う実施形態を上回る或る一定の利点を有することが可能である。材料加工産業ではNd:YAGレーザに伴う長い工業的経験があり、それらは高出力(例えば約100W〜6kW)を供給する。付け加えると、Nd:YAGレーザから出るレーザ光は相対的に小規模で長い光ファイバを通じてわずかの出力損失(例えば約12%)しか伴わずに光ファイバによって供給されることが可能である。これは作業領域から比較的遠い(例えば約100メートルの)場所にレーザ発生器310と支持機材を計画することを許容する。加工される表面から遠くにレーザ発生器310を保持することは装置50の残りの部分がさらに小型でさらに携帯型にされることを可能にする。
【0036】
アーク放電ランプの励起によるNd:YAGレーザはNd:YAG結晶を励起してレーザ光を発生するためにアーク放電ランプを使用する。ダイオード励起によるNd:YAGレーザはNd:YAG結晶を励起するためにダイオードレーザを使用し、結果として電力効率の上昇につながる(例えばアーク放電ランプの励起によるNd:YAGレーザで5%未満であることに比べて約10〜25%)。この向上した効率は結果としてさらに良好なビーム品質を有し、さらに小型の冷却用サブシステム320を要するダイオード励起型レーザにつながる。範例のアーク放電ランプ励起によるNd:YAGレーザはDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能である。
【0037】
本願明細書に述べられる実施形態に適合したNd:YAGおよび他の固体レーザ(例えばNd:YLiF4、Ti:サファイヤ、Yb:YAGなど)はいくつかの方法によって構成され、かつ励起されることが可能である。これらの方法は、限定はされないがフラッシュランプおよびアークランプ、ならびにダイオードレーザを含む。限定はされないが棒状、厚板状、およびディスク状の構造を含めた様々な構造の固体媒体が本願明細書に述べられる実施形態に適合する。多様な構造および励起方法の利点は、限定はされないがレーザ発生器310の効率、ビーム品質、および動作モードを含めたレーザ発生器310の様々な態様に影響を与えるであろう。例えば、ディスクレーザは、反射面の一方をヒートシンクとして使用するダイオード励起型ウエハすなわち「ディスク」に基づく。或る実施形態では、このようなディスクレーザによって、熱の影響が少ないまま高出力パワーを得られ、また、直径の小さいファイバに照射し得る高効率(例えば、20%)および高品質のレーザビームを供給し得る。範例となるダイオード励起によるNd:YAGディスクレーザはDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能である。
【0038】
ファイバレーザはレーザビームを作り出すためにドープされた(例えばイッテルビウムまたはエルビウムでドープされた)ファイバを使用する。ドープされたファイバは、限定はされないがアーク放電ランプおよびダイオードを含めた他の光源によって励起されることが可能である。ファイバレーザはレーザビームを相互作用場所へと搬送する供給用ファイバへと連結されることが可能である。或る実施形態では、ファイバレーザは約15%から約20%の有利な効率を提供する。そのような高効率はレーザ発生器310をさらに移動型にするが、なぜならばそれらがさらに小型の冷却ユニットを利用するからである。付け加えると、加工される領域に近接してそのような高効率レーザ発生器310が配置され
ることが可能である。本願明細書に述べられる実施形態に適合した範例のファイバレーザは、Oxford,MassachusettsのIPG Photonics社から入手可能なYLR−4000であり、これは、4000ワット、連続波(CW)で、約1070ナノメートルの赤外線に近い波長で作動する、イッテルビウム:イットリウム−アルミニウム−ガーネット(Yb:YAG)ファイバレーザである。
【0039】
通常では、レーザ発生器310によるレーザ光の発生は余剰の熱を作り出し、これはレーザ発生器310に連結された冷却用サブシステム320によってレーザ発生器310から取り除かれることが好ましい。必要とされる冷却の量は使用されるレーザのサイズおよびタイプによって決定されるが、4kWのNd:YAGレーザについては約190kWの冷却容量であることが可能である。冷却用サブシステム320は既存のプロセス水もしくは冷却水による冷却用サブシステムのように、現場で余剰の冷却能力を利用することが可能である。場合によっては、レーザ発生器310専用のユニット型冷却用サブシステムが使用されることが好ましい。ユニット型冷却用サブシステムは空冷または液冷されることが可能である。
【0040】
図2に概略で例示されるような或る実施形態では、冷却用サブシステム320はレーザ発生器310に充分な循環冷却水を供給して余剰の熱を除去するようにレーザ発生器310へと連結された熱交換器322および水冷器324を有する。熱交換器322は水から余剰の熱の一部を除去し、その水を水冷器324へと戻して循環させることが好ましい。水冷器324は予め決められた温度に水を冷却し、その冷却水をレーザ発生器310へと戻す。本願明細書に述べられる実施形態による範例の熱交換器322および水冷器324はDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能である。
【0041】
・レーザヘッド
或る実施形態では、レーザヘッド200はレーザ発生器310へと連結され、装置50と照射される建造物との間のインターフェースとしてはたらく。図1で概略的に例示されるように、エネルギー導管400がレーザヘッド200とレーザ発生器310を連結し、レーザ発生器310からレーザヘッド200へのエネルギーの伝達を容易にする。或る実施形態では、エネルギー導管400は光ファイバを有し、それがレーザ発生器310からレーザヘッド200へとレーザ光を伝達する。他の実施形態では、エネルギー導管400は光ファイバ、電力供給または制御用配線ケーブルを含むことが可能な導体を有する。例示的なエネルギー導管400は、50メートルのファイバを含む。或る実施形態では、照射される表面は、居住可能な建造物内にある。以下にさらに十分な説明をするように、或る実施形態は、比較的小型で、コンパクト、軽量な装置を提供し、当該装置は、居住可能な建造物内の種々の場所に運ばれ、居住可能な建造物内の比較的狭く取り囲まれた空間内において使用し得る。
【0042】
図3Aは本願明細書に述べられた実施形態によるレーザのヘッド200を概略的に例示している。レーザヘッド200はコネクタ210、少なくとも1つの光学素子220、ハウジング230、気体格納容器240を有する。或る実施形態では、コネクタ210はハウジング230へと連結され、エネルギー導管400を介してレーザ発生器310へと光学的に連結され、レーザ発生器310から出るレーザ光を伝達するように構成される。光学素子220はコネクタ210、ハウジング230、または気体格納容器240の中に配置されることが可能である。図3Aは光学素子220がハウジング230の中にある実施形態を例示している。導管400がレーザヘッド200へとレーザ光を供給する実施形態では、レーザ光は照射される建造物に衝突する前に光学素子220を通過して伝達される。
【0043】
・レーザヘッド:拡張された構造
図3Bは本願明細書に述べられた実施形態によるレーザヘッド200の1つの構造を概略的に例示している。ハウジング230は遠位部分232、角部分234、および近位部分236を有する。本願明細書で使用される「遠位」および「近位」という用語は相互作用領域に相対した部分の位置に該して関する標準的な定義を有する。コネクタ210が遠位部分232へと連結され、それが角部分234へと連結され、それが近位部分236へと連結され、それが気体格納容器240に連結される。図3Bに例示されるような構造は建造物(例えばコンクリートの壁)の表面に穴明けおよび荒仕上げを行なうために使用されることが可能である。レーザヘッド200の様々な部品はFarmington Hills,MichiganのLaser Mechanisms,Inc.社から入手可能である。
【0044】
エネルギー導管400が光ファイバを有する或る実施形態では、コネクタ210はレーザ発生器310から光ファイバを通してレーザヘッド200へと伝送されるレーザ光を受け取る。或るそのような実施形態では、コネクタ210は導管400によって発射される発散レーザ光を平行化するレンズ212を有する。レンズ212は透過型であって所望の量でレーザ光を屈折させるであろう様々な材料を含むことが可能である。そのような材料は、限定はされないがホウ珪酸クラウンガラス(BK7)、石英(SiO2)、セレン化亜鉛(ZnSe)、および塩化ナトリウム(NaCl)を含む。レンズ212の材料は材料の品質、コスト、および安定性に基づいて選択されることが可能である。ホウ珪酸クラウンガラスは透過型光学系のためにNd:YAGレーザと共に一般的に使用され、セレン化亜鉛は透過型光学系のためにCO2レーザと共に一般的に使用される。
【0045】
レンズ212は、レンズ212の洗浄、保守管理、および交換を容易にするために或る実施形態では取り外し可能な組み立て品に装着されることが可能である。付け加えると、レンズ212の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。或る実施形態では、レンズ212はビームのプロファイル(例えば焦点集束、ビーム形状)の追加的な修正を提供することが可能である。
【0046】
或る実施形態の平行化されたレーザ光はその後、レーザヘッド200の中の他の光学素子を経由してレーザヘッド200を通して伝送される。或る実施形態では、遠位部分232は該して真っ直ぐの第1のチューブを含み、これを通ってレーザ光が角部分234へと伝搬し、近位部分236は該して真っ直ぐの第2のチューブを含み、これを通って角部分234からレーザ光が伝搬する。或る実施形態では、遠位部分232はレンズ233を含み、角部分234は近位部分236および気体格納部分240を通して建造物上に光を向けるミラー235を含む。他の実施形態では、近位部分236および気体格納部分240を通して建造物上に光を向けるために他の装置(例えばプリズム)が角部分234内で使用されることが可能である。
【0047】
レンズ233は、レンズ233の洗浄、保守管理、および交換を容易にするために或る実施形態では取り外し可能な組み立て品に装着されることが可能である。付け加えると、レンズ233の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。或る実施形態では、レンズ233はレンズ212から受け取る光を焦点集束し、その一方でレンズ233はビームのプロファイル(例えばビーム形状)の追加的な修正を提供することが可能である。範例となるレンズ233は、限定はされないが焦点距離600mmのシリカ製平凸レンズ(例えばAlbuquerque,New MexicoのCVI Laser Corp.社から入手可能な部品番号PLCX−50.8−309.1−UV−1064)を含む。レンズ233は透過型であって所望の量でレーザ光を屈折させるであろう様々な材料を含む
ことが可能である。そのような材料は、限定はされないがホウ珪酸クラウンガラス、石英、セレン化亜鉛、および塩化ナトリウムを含む。範例のレンズ装着組み立て品は、限定はされないがFarmington Hills,MichiganのLaser Mechanisms,Inc.社から入手可能な部品番号PLALH0097およびPLFLH0119を含む。
【0048】
遠位部分232が近位部分236に対して実質的に直角である図3Bで概略的に例示される実施形態では、ミラー235は約90度の角度で光を反射する。他の実施形態は他の角度で光を反射するように構成される。ミラー235は、ミラー235の洗浄、保守管理、および交換を容易にするために或る実施形態では取り外し可能な組み立て品に装着されることが可能である。付け加えると、ミラー235の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。或る実施形態ではミラー235は光ビームを焦点集束させるかまたはそうでなければビームプロファイル(例えばビーム形状)を修正するように曲率を有するか、またはそうでなければそのように構成されることもやはり可能である。範例のミラー235は、限定はされないが銅ミラーのような金属製ミラー(例えばFarmington Hills,MichiganのLaser Mechanisms,Inc.社から入手可能な部品番号PLTRG19およびPLTRC0024)、および金コーティングされた銅ミラー(例えばLaser Mechanisms,Inc.から入手可能な部品番号PLTRC0100)を含む。他の実施形態では、誘電体をコーティングしたミラーが使用されることが可能である。
【0049】
図3Cは本願明細書に述べられた実施形態によるレーザヘッド200の別の構造を概略的に例示している。ハウジング230は遠位部分232、第1の角部分234、第2の角部分234’、および近位部分236を有する。コネクタ210が遠位部分232へと連結され、それが第1の角部分234へと連結され、それが第2の角部分234’へと連結されそれが近位部分236へと連結され、それが気体格納容器240へと連結される。図3Cで例示されるような構造は空間的に制限された領域内の建造物を切削するため(例えば隅または突起部付近のコンクリート壁の部分を切削するため)に使用されることが可能である。
【0050】
上述されたように或る実施形態では、コネクタ210はレンズ212を有し、遠位部分232は管状であってレンズ233を有する。図3Cで例示された実施形態の第1の角部分234は第1のミラー235を有し、それが第2のミラー235’を有する第2の角部分234’へと光を方向付ける。第2のミラー235’は管状であることが可能な近位部分236、および気体格納容器240を通って建造物上へと光を方向付ける。或る実施形態では、下記で気体格納容器240に関してさらに充分に述べられるように、光は窓243およびノズル244を通って相互作用領域へと伝達される。或る実施形態では、レーザヘッド200が窓243およびノズル244を有し、その一方で他の実施形態では窓243およびノズル244は気体格納容器240の部品である。
【0051】
図3Cで概略的に例示された実施形態では、第1のミラー235が約90度の角度で光を反射し、第2のミラー235’が約−90度の角度で光を反射し、それにより、近位部分236は遠位部分に実質的に平行になる。そのような実施形態では、気体格納容器240によって発射される光は遠位部分232を通って伝搬する光と実質的に平行であるが、それから離れている。他の実施形態は、光を他の角度で反射するように構成された第1のミラー235および第2のミラー235’を有する。或る実施形態は気体格納容器240によって発射される光の、遠位部分232を通って伝搬する光からの追加的な移動を供給するために第1の角部分234と第2の角部分234’との間に直線の管状部分を有する。
【0052】
或る実施形態では、遠位部分232と第1の角部分234との間の結合部が回転可能である。或る別の実施形態では、第1の角部分234と第2の角部分234’との間の結合部が回転可能である。これらの回転可能な結合部は蝶ネジによってロックされることが可能なスイベル継手を有することが可能である。そのような実施形態は、気体格納容器240によって発射される光を選択された方向に向ける処理に追加的な自在性を与える。或る実施形態では、選択される方向は遠位部分232を通って伝搬する光とは非平面にある。
【0053】
上述されたように、第1のミラー235と第2のミラー235’のうちの一方または両方が或る実施形態では洗浄、保守管理、および交換を容易にするために取り外し可能な組み立て品に装着されることが可能である。付け加えると、第1のミラー235および/または第2のミラー235’の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。或る実施形態では、第1のミラー235と第2のミラー235’のうちの一方または両方が、光ビームを焦点集束させるかまたはそうでなければビームプロファイル(例えばビーム形状)を修正するように曲率を有するか、またはそうでなければそのように構成されることもやはり可能である。
【0054】
或る実施形態では、レーザヘッド200の中の1つまたは複数の光学素子220(例えばレンズ212、レンズ233、ミラー235、ミラー235’)は水冷されるかまたは空冷される。冷却水は、レーザヘッド200の近くに配置され、かつレーザヘッド200へと流れる充分な水を供給することに専用にされた熱交換器によって供給されることが可能である。或るそのような実施形態では、各々の光学素子220のための冷却水用の導管が、光学素子220の付近を順々に冷却水が流れるように直列に接続されることが可能である。他の実施形態では、様々な光学素子220の付近に冷却水の別々の部分が流れるように導管は並列に接続される。範例の熱交換器は、限定はされないがAppleton,WisconsinのMiller Electric Manufacturing Co.社から入手可能なMiller Coolmate(登録商標)4を含む。冷却水の流量は少なくとも毎分約0.5ガロンであることが好ましい。
【0055】
・レーザヘッド:小型構造
図20および図21A〜図21Cは本願明細書に述べられた実施形態によるレーザヘッド1200の他の複数の構造を概略的に例示している。図21Dは、本願明細書に述べる実施形態によるレーザヘッド1200および固定用メカニズム1110の例示的な小型構造を示している。レーザヘッド1200の或る実施形態は可動性であって、かつ1人の個人によって照射される表面に相対して定位置に設置されるように構成される。或るそのような実施形態では、レーザヘッド1200と、下記で検討される固定用メカニズム1110の或る実施形態との組み合わせは50ポンド未満の重さである。或るそのような実施形態は、深さ約9.5インチまでコンクリートに孔をあけるために用いると都合がよい。
【0056】
図20で例示される実施形態は、通常、照射される表面に穴をあけるために適しており、通常では図3Bおよび3Cの実施形態よりも小さいサイズと重量であり、それにより、一層制約のある空間にアクセスすることに適した装置を提供する。付け加えると、図20の実施形態は通常では図3Bおよび3Cの実施形態よりもさらに単純でさらに頑丈であり、それにより、粗雑な取り扱いおよび非理想的な動作条件に耐えるように構成される装置を提供する。
【0057】
或る実施形態ではレーザヘッド1200は該して長方形のハウジング1230を有する。レーザヘッド1200の他の実施形態はハウジング1230上、またはハウジング1230の中に配置される。或る実施形態のハウジング1230は接続構造体(図示せず)を
有し、それが固定用メカニズム1110へと取り外し可能に連結されるように構成され、それが、下記でさらに述べられるように、照射される表面に相対してレーザヘッド1200を位置決めするように構成される。範例の実施形態では、ハウジング1230は約12インチの長さ、約8インチの高さ、および約4インチの幅を有する。ハウジング1230の他の形状および寸法が本願明細書に述べられる他の実施形態と適合する。
【0058】
或る実施形態では、レーザヘッド1200はレーザ発生器310からレーザヘッド1200へとレーザ光を搬送する導管400に連結されるように適合されたコネクタ1210をさらに有する。或る実施形態ではコネクタ1210は導管400によって発射される発散レーザ光を平行化するレンズ(図示せず)を有する。例示的実施形態において、レンズは、約23.6インチ(約600ミリメートル)の焦点距離を有し、調節可能なレンズ収納体(lens drawer)内に配置される。拡張された構造に関して上述されたように、様々
な実施形態のレンズは様々な材料を含むことが可能であり、取り外し可能にハウジング1230へと装着されることが可能であり、調節可能にハウジング1230へと装着されることが可能であり、ビームプロファイルの追加的な修正を提供することが可能である。
【0059】
或る実施形態では、レーザヘッド1200はさらに、コネクタ1210から第1のゼロ以外の角度で光を反射するように構成された第1のミラー1235、第1のミラー1235から第2のゼロ以外の角度で、気体格納容器240へと連結されるように構成されるノズル1244へと光を反射するように構成された第2のミラー1235’を有する。或る実施形態では、図20に概略的に例示されるように第1のゼロ以外の角度は第2のゼロ以外の角度の負にほぼ等しい。一層小さい空間に入る長さを有する伝搬経路を効率的に「折り返す」ミラー間で光を反射するので、そのような2つのミラーの構成はしばしば「折り返し光学系」と呼ばれる。レーザヘッド1200の或る実施形態はレーザ光のビームプロファイルを修正するように構成された追加的な光学部品を有する。
【0060】
拡張された構造に関連して上述されたように、第1のミラー1235と第2のミラー1235’のうちの少なくとも1つはハウジング1230の中で取り外し可能かつ調節可能な組み立て品上に装着される。付け加えると、或る実施形態の第1のミラー1235と第2のミラー1235’のうちの少なくとも1つはビームプロファイルを修正するように曲率を有するか、そうでなければそのように構成される。或る実施形態の第1のミラー1235と第2のミラー1235’のうちの少なくとも1つは冷却用導管によって供給される空気または水のどちらかで冷却される。例えば、或る実施形態では、水を少なくとも約0.5ガロン/秒の速度でレーザヘッド1200に流し得る。或る実施形態では、冷却用導管はハウジング1230の中に収容され、それにより、レーザヘッド1200をさらに扱い易くし、かつレーザヘッド1200をさらに頑丈にすることでレーザヘッド1200の輸送および設置を容易にする。ある実施形態のレーザヘッド1200は、電気的コネクタ1215をさらに備え、当該コネクタ1215は、電気コードに接続されて、レーザヘッド1200に電力を供給し、かつ/またはセンサ信号をレーザヘッド1200から制御器500に供給し得る。ある実施形態では、レーザヘッド1200は、1つまたはそれ以上のステータスライト1217をさらに備え、当該ライト1217は、レーザヘッド1200のステータスに関する情報を提供する。
【0061】
或る実施形態では、図21Cおよび図21Dに示されるようにレーザヘッド1200はハウジング1230に連結されたレーザヘッドハンドル1240を有する。レーザヘッドハンドル1240はレーザヘッド1200を選択された場所に輸送および位置決めすることを容易にするように適合される。レーザヘッドハンドル1240の他の構造は本願明細書に述べられる他の実施形態に適合する。或る実施形態のレーザヘッド1200はさらに、レーザヘッド1200を固定用メカニズム1110へと取り外し可能に連結するように構成されたカプラ1250を有する。レーザヘッド1200の他の構造は本願明細書に述
べられる実施形態に適合する。
【0062】
或る実施形態では、図21A〜図21Dに示されるようなレーザヘッド1200の小型の構造(「小型レーザヘッド」)は図3Bおよび3Cに示されたようなレーザヘッドの拡張された構造(「拡張型レーザヘッド」)200よりも或る用途で有利に使用される。例えば、建造物に穴をあけるとき、拡張型レーザヘッド200がその長さもしくは他の制約(例えばエネルギー導管400とコネクタ210の間の連結部の剛性)のせいでアクセスを有することが不可能な領域が存在し得る。小型レーザヘッド1200はさらに小さい体積を有し、それにより、さらに小さい領域へのアクセスを可能にする。
【0063】
付け加えると、或る実施形態では、エネルギー導管400とレーザヘッド1200のコネクタ1210との間の回転式連結を供給するように構成された枢動型コリメータヘッド1250を有するエネルギー導管400と結び付けて小型レーザヘッド1200が使用される。そのような実施形態では、枢動型コリメータヘッドは、レーザヘッド1200をさらに小さい領域にアクセスさせることにより追加の可撓性を提供する。このコリメータヘッドは、レーザ光がレーザヘッド1200に入射するのと同じ方向にエネルギー導管400が向くようにまっすぐであってもよく、エネルギー導管400が、図21Dに示したように、異なる方向に向くようなある角度(例えば90度)を有してもよい。異なる配向でコリメータヘッドを使用することは都合の良いことに、制約のある領域へのアクセスを与えるためにエネルギー導管400の様々な配向を可能にする。本願明細書に述べられた実施形態に適合する範例のコリメータヘッドはDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能である。
【0064】
さらに、或る実施形態では小型レーザヘッド1200はハウジング1230の中に様々なセンサ、近接スイッチ、および流量計もやはり組み入れる。例えば、レーザヘッド1200は、1つまたはそれ以上のセンサを備え、当該センサは、以下の1つまたはそれ以上のものを、すなわち、レーザヘッド1200が居住可能な建造物の表面と接触しているか否か、レーザヘッド1200が、固定用メカニズム1110と結合されているか否か、レーザ発生器310がオンになっているかまたは始動しているか否かの1つまたはそれ以上を測定し得る。そのような実施形態は該して拡張型レーザヘッド200よりもさらに単純でさらに頑丈であり、それにより、粗雑な取り扱いおよび非理想的な動作条件に耐えるように適合され、かつさらに損傷を受けにくい装置を提供する。
【0065】
・レーザヘッド:軽量構造
図22Aは固定用メカニズム1110と軽量レーザヘッド2200の組み合わせを概略的に例示している。図22Bは、別の例示的な軽量型レーザヘッド2200および固定用メカニズム1110を示している。図22Bに示すように、軽量型レーザヘッド2200は、コネクタ2210を備え、当該コネクタ2210を通って、レーザ光がレーザヘッド2200に伝送される。ある実施形態のレーザヘッド2200は、さらに電気的コネクタ2215を備え、当該電気的コネクタ2215は、電気コードに接続されて、レーザヘッド2200に電力を供給し、かつ/またはセンサ信号をレーザヘッド2200から制御器500に供給し得る。ある実施形態では、レーザヘッド2200は、1つまたはそれ以上のステータスライト2217をさらに備え、当該ライト2217は、レーザヘッド2200のステータスに関する情報を提供する。或る実施形態では、レーザヘッド2200は、冷却ライン2218に結合され、当該冷却ライン2218は、冷却水を、レーザヘッド2200内のミラー、レンズ、または他の光学素子に供給し得る。
【0066】
図22Cに、図22Bのレーザヘッド2200に結合された気体格納器240を示す。気体格納器240は、気体格納ハウジング242と、照射される表面と接触するように構成された弾力性インターフェース246とを備える。ある実施形態では、気体格納器24
0は、レーザヘッド2200から取り外し、かつ/またはレーザヘッド2200に沿って調節して、表面にレーザを照射するための、レーザヘッド2200および気体格納器240の位置決めを容易にし得る。
【0067】
或る実施形態では、レーザヘッド2200は140ミリメートルの焦点距離を有し、市販入手可能な、例えばDitzingen,GermanyのTrumpf Lasertechnik GmbH社から入手可能な冷却用および観察用ポートを備えたD35(カタログ番号35902090)の90度フォーカスヘッドである。或る実施形態のレーザヘッド2200は、直径が約6ミリメートルの比較的浅い(例えば、深さが約65ミリメートルの)穴をあけるように構成される。或る実施形態では、レーザヘッド/固定用メカニズムの組み合わせは10ポンド未満の重さであり、その一方で他の実施形態ではその組み合わせは約8ポンドである。ある実施形態では、レーザヘッド2200は、上述のように、スイッチの近傍に、1つまたはそれ以上のセンサまたは流量計を備える。
【0068】
・レーザヘッド:気体格納容器
或る実施形態では、レーザヘッド200は近位部分236へと連結され、かつ建造物とのインターフェースとなる気体格納容器240を有する。或る実施形態では、気体格納容器240は建造物から除去される材料物質(例えばレーザ加工中に発生する破片および噴煙)を閉じ込め、相互作用領域からその材料物質を取り除くように構成される。気体格納容器240はまたさらに、相互作用領域から気体格納容器240の外へと(例えばレーザの公称の危険ゾーン(「NHZ」)へと)発射される騒音と光を削減するように構成される。気体格納容器240の1つの目標は、いずれの個人の眼または皮膚にも被曝放出限界(「AEL」)または最大許容曝露(「MPE」)限界を超えるレーザ放射が到達しないことを確実化することであることが可能である。
【0069】
図4は本願明細書に述べられる実施形態による気体格納容器240の断面を概略的に例示している。図4の気体格納容器240は気体格納ハウジング242、窓243、ノズル244、弾力性インターフェース246、抽出ポート248、および圧縮ガス注入口249を有する。気体格納ハウジング242はレーザ光の供給源(例えばレーザヘッド200の近位部分236)へと連結されることが可能であり、気体格納容器240の他の複数部品の構造的支持を提供することが可能である。気体格納ハウジング242用の範例の材料は、限定はされないが薄い可撓性のシートであることが可能な金属(例えばアルミニウム、スチール)、セラミック材料、ガラスもしくはグラファイトの繊維、およびガラスもしくはグラファイトの繊維で作られた織物を含む。或る実施形態では、気体格納ハウジング242が空気または水のどちらかで冷却されることで気体格納ハウジング242の加熱を減少させる。気体格納ハウジング242用の冷却剤導管はレーザヘッド200の他の部品用の冷却剤導管と直列または並列に連結されることが可能である。
【0070】
或る実施形態の窓243はノズル244の上流で、かつ近位部分236から建造物へのレーザ光の伝搬経路の中に位置決めされる。本願明細書で使用する「上流」および「下流」という用語はレーザ光の伝搬方向およびレーザ光の伝搬方向と反対の方向にそれぞれ関する一般的意味を有する。そのような実施形態では、気体格納容器240を通って伝搬する光はノズル244に到達する前に窓243に到達する。光が窓243を通って下流へと伝搬するそのような実施形態では、窓243はレーザ光に対して実質的に透過性である。レーザ光を下流方向に伝送するために窓243は気体格納ハウジング242の中に装着されることが可能である。窓243は、限定はされないが方形および円形を含めたいくつかの形状を有することが可能である。範例の窓243は、限定はされないがシリカの窓(例えばAlbuquerque,New MexicoのCVI Laser Corp.社から入手可能な部品番号W2−PW−2037−UV−1064−0)を含む。
【0071】
レーザヘッド200の光学素子上の粉塵および/または埃はレーザ光の目に見えるほどの画分を吸収する可能性が高く、結果として不均一な加熱につながり、それが光学素子に損傷を与えることがあり得る。或る実施形態では、レーザ光と建造物との相互作用によって発生する粉塵、煙、または他の粒子状物質の上流への輸送に対するバリヤを供給するために窓243が気体格納ハウジング242の中に装着される。この方式で、窓243はレーザヘッド200の他の部分の中の上流の光学素子の保護を容易にすることが可能である。
【0072】
窓243は、窓243の洗浄、保守管理、および交換を容易にするために或る実施形態では取り外し可能な組み立て品に装着されることが可能である。或る実施形態では、窓243は近位部分236から受け取る光を焦点集束させ、その一方で他の実施形態では、窓243はビームプロファイル(例えばビーム形状)の追加的な修正を提供することが可能である。そのような実施形態では、窓243の装着は、光ビームの位置合わせおよび焦点集束を最適化するように(例えば蝶ネジまたはアレン六角ネジを使用して)調節可能である。範例の窓装着組み立て品は、限定はされないがFarmington Hills,MichiganのLaser Mechanisms,Inc.社から入手可能な部品番号PLALH0097およびPLFLH0119を含む。或る実施形態では、窓243は空気または水のどちらかで冷却される。
【0073】
窓243を通して伝送されるレーザ光はノズル244を通して建造物の相互作用領域に向けて発射される。レーザ光はノズル244の開口部付近で焦点集束させられることが可能である。ノズル244のための範例の材料は、限定はされないが金属(例えば銅)を含む。或る実施形態では、ノズル244の加熱を減少させるためにノズル244は空気または水のどちらかで冷却される。ノズル244用の冷却剤導管はレーザヘッド200の他の部品用の冷却剤導管と直列または並列に連結されることが可能である。
【0074】
ノズル244を通って伝搬するレーザ光は、ノズル244を過剰に加熱すること、および傷つけることを避けるためにノズル244に衝突(「クリッピング」と称される)しないことが好ましい。レーザヘッド200を通るレーザ光の不適切な位置合わせはクリッピングを引き起こす可能性が高い。ノズル244の開口部は、レーザ光がノズル244と目に見えるほどに相互作用しないように充分に大きいことが可能である。或る実施形態では、ノズル244は直径で約0.3インチである。
【0075】
或る実施形態では、気体格納容器240の弾力性インターフェース246は建造物に接触し、かつ相互作用領域を実質的に取り囲むように構成され、それにより、相互作用領域の封じ込め、およびそこからの材料物質の除去を容易にする。付け加えると、弾力性材料246は、気体格納容器240の外側への光および/または音漏れの防止を容易にすることが可能である。範例の弾力性材料246は、限定はされないがワイヤブラシまたはゴム製シール(例えば、バルブシール)を含む。ワイヤブラシは、インターフェース領域の熱、光、溶融した材料、および他の環境上の態様にさらされることに耐え得る金属材料を含む。ゴム製シールは、ゴム材料を含み、ゴム材料は、相互作用領域の熱、光、溶融した材料、および他の環境上の状況にさらされても耐え得る。本願明細書における開示の観点から、本願明細書による弾力性インターフェース246に適切な材料を、当業者は選択し得る。
【0076】
或る実施形態では、気体格納容器240の抽出ポート248は動作中に相互作用領域内で発生する材料物質(例えばガス、蒸気、粉塵、および破片)のうちの目に見えるほどの部分を抽出するように構成される。抽出ポート248は相互作用領域から材料物質(例えば粉塵、ガス、および蒸気を引き抜くために真空を作り出す真空発生器(図示せず)へと連結されることが可能である。この方式で、抽出ポート248は気体格納容器240から
の材料物質の除去のための経路を供給することが可能である。
【0077】
或る実施形態では、圧縮ガス注入口249は気体格納容器240に圧縮ガス(例えば空気)を供給するように構成される。或る実施形態では、圧縮ガス注入口249は圧縮ガス流を相互作用領域に方向付けるように構成されるノズル244へと流体連結される。或る実施形態では、圧縮ガス流はノズル244を通るレーザ光と同軸に流れる。或る実施形態の窓243は圧縮ガスが圧力を加える対象の表面を与える。この方式で、圧縮ガスは選択された圧力と速度でノズル244を通って相互作用領域へと流れることが可能である。
【0078】
圧縮ガス注入口249からノズル244を通って流れる圧縮ガスは粉塵、破片、煙、およびその他の粒子状物質がノズル244に入ることを阻止するために使用されることが可能である。この方式で、圧縮ガスはそのような粒子状物質からの窓243の保護を容易にすることが可能である。付け加えると、圧縮ガスは相互作用領域からの材料物質の除去を容易にするように、かつ/または相互作用領域を冷却するようにノズル244によって相互作用領域へと方向付けられることが可能である。建造物がSiの高い百分率を備えたコンクリートを有し、それにより、結果的に生じるガラス質のスラグが充分に粘性を有して相互作用領域から除去することが一層困難である実施形態では、ノズル244はこの様式で使用されることが可能である。
【0079】
或る実施形態では、窓243の表面の不純物汚染、および不均一な加熱による窓243のあり得る損傷を避けるために、圧縮ガスは実質的に油分、湿気、またはその他の不純物を含まない。計器用品質(「IQ」)の圧縮空気の範例の供給源はDavidson,North CarolinaのIngersoll−Rand Air Solutions Group社から入手可能な300−IQ圧縮空気である。圧縮空気の供給源は空気を供給するホースの長さ、および空気を使用する部品の数とその必要量によって部分的に決定される充分な流量で空気を供給することが好ましい。
【0080】
或る実施形態では、空気圧縮機はレーザヘッド200から数百フィート離れて配置されることが可能である。そのような実施形態では、圧縮空気の供給源は空気圧縮機とレーザヘッド200の間の空気導管もしくはホース内に凝結する湿気の量を減らすために空気乾燥機を有することが可能である。本願明細書に述べられる実施形態による範例の空気乾燥機はWest Chester,PennsylvaniaのZeks Compressed Air Solutions社から入手可能な400HSB空気乾燥機である。
【0081】
或る実施形態では、図5に概略的に例示されるようにレーザヘッド200はレーザヘッド200と相互作用領域の間の相対的距離を測定するように構成されたセンサ250を有する。図5は、気体格納容器240がセンサ250を有する実施形態を概略的に例示しているが、しかしセンサ250の別の配置もやはり本願明細書に述べられた実施形態に適合する。建造物から材料物質が除去されると、相互作用領域は建造物の中へと広がる。そのとき、センサ250は相互作用領域の建造物の表面からの深さの指標を与える。センサ250はこの距離を判定するために、限定はされないが音響センサ、赤外線センサ、接触センサ、およびイメージセンサを含めた様々な技術を使用することが可能である。レーザによる荒仕上げ処理または加工が実行される或る実施形態では、レーザヘッド200と加工される表面との間の距離を判定するために、ダイオードレーザを有し、かつ三角測量を利用するセンサ250が使用されることが可能である。そのようなセンサ250は表面から除去される材料物質の量の指標を与えることもやはり可能である。
【0082】
或る実施形態では、センサ250は制御器500へと連結され、制御器500はセンサ250からの信号に応答してレーザの基本ユニット300へと制御信号を送信するように構成される。レーザの基本ユニット300はこの制御信号に応答してレーザ光の1つまた
は複数のパラメータを調節するように構成される。この方式で、レーザ光の焦点もしくは他のパラメータを調節するためにセンサ250からの深さ情報がリアルタイムで使用されることが可能である。
【0083】
他の実施形態では、制御器500はセンサ250からの信号に応答してレーザ操作システム100へと制御信号を送信するように構成される。レーザ操作システム100はこの制御信号に応答してレーザヘッド200と相互作用領域との間の相対的距離を調節するように構成される。さらに、レーザ操作システム100を、この制御信号に応答してレーザヘッド200の位置を構造の表面に沿って調節するように構成することもできる。この方式で、いったん第1の場所で所望の深さが達成されると表面に沿ってレーザ光を他の場所に移動させるように、第1の場所のセンサ250からの深さ情報がリアルタイムで使用されることが可能である。
【0084】
他の実施形態では、相互作用領域の深さを判定するためにセンサ250が統計学的方法と結び付けて使用される。そのような実施形態では、最初に測定段階でセンサ250が使用されることで統計学的データを作り上げ、それが浸食深さを或る一定の加工パラメータ(例えば加工される材料、光の強度)と相関付ける。測定段階の間では、選択される加工パラメータは試験を処理するため、または加工される建造物の表面を示すサンプル表面を処理するために系統的に変えられる。これらの加工パラメータに対応して相互作用領域の深さを判定するためにセンサ250が測定段階で使用される。或るそのような実施形態では、センサ250はレーザヘッド200から分離していることが可能であり、建造物の加工中、または相互作用領域の深さを測定するために加工が一時的に中断された期間中に使用されることが可能である。そのような実施形態に適合する範例のセンサ250は、限定はされないがキャリパ、あるいは相互作用領域の深さを判定するために結果的に生じた穴の中に挿入される他の手動式の測定装置を含む。
【0085】
或る実施形態では、制御器500は加工パラメータと相互作用領域の深さとの間の相関に関するこの結果的に得られた統計学的データを有する。それに続く加工段階の中で、今回はセンサ250を使用せずに建造物が加工され、制御器500が、使用される特定の加工パラメータに対応して統計学的データにアクセスすることによって相対的距離を判定するように構成されることが可能である。そのような取り組み方は建造物を加工中に相互作用領域の深さを判定するために信頼性があり、かつ費用効率の高い取り組み方である。
【0086】
代替選択肢の実施形態では、センサ250はレーザヘッド200と建造物の表面との間の距離の指標を与えるように構成される。そのような実施形態では、センサ250は予め決められた距離を超えるレーザヘッド200と建造物との間の相対的距離を検出すると不合格状態信号を制御器500に供給するように構成されることが可能である。そのような不合格状態は不注意で建造物から引き離される装置50から結果的に得られることが可能である。レーザの基本ユニット300とレーザヘッド200との間のエネルギーの伝送を中断するために、制御器500は適切な信号をレーザの基本ユニット300へと送ることによって不合格状態信号に応答するように構成されることが可能である。或る実施形態では、この伝送はレーザヘッド200が建造物の表面から1センチメートルよりも遠くになると中断されることが好ましい。この方式で、気体格納容器240が建造物に接触していない限りレーザ光が発射されないことを確実化するために装置50はセンサ250を利用することが可能である。或る実施形態では、センサ250は装置50が建造物に付けられているときに建造物の表面に接触する近接スイッチを有する。
【0087】
(レーザ操作システム(LMS))
・LMS:固定用メカニズムと位置決め用メカニズムの組み合わせ
或る実施形態では、レーザ操作システム100は加工される表面に該して平行の多関節
ロボット動作を与えるように建造物との関係でレーザヘッド200を正確かつ反復的に位置決めするようにはたらく。そのようにするために、レーザ操作システム100は加工される建造物に取り外し可能に固定されることが可能であり、その後、その表面付近でレーザヘッド200を正確に移動させることが可能である。図6Aおよび6Bは、取り外し可能に建造物へと連結されるように構成された固定用メカニズム110および固定用メカニズム110へと連結され、かつレーザヘッド200へと連結される位置決め用メカニズム121をレーザ操作システム100が有する実施形態の2つの反対側の立面図を概略的に例示している。或る実施形態では、レーザ操作システム100は輸送、保管、または保守管理のために都合良く解体および再組み立てされることが可能である。
【0088】
・固定用メカニズム
レーザ操作システム100の或る実施形態はレーザ操作システム100を加工される建造物へと取り外し可能に固定するための固定用メカニズム110を有する。固定用メカニズム110は取り外し可能に建造物へと連結されるように構成されることが可能であり、1つまたは複数の取り付けインターフェース111を有することが可能である。
【0089】
或る実施形態では、固定用メカニズム110は、居住可能な建造物内の表面に取り外し可能に結合される。あるそのような実施形態によって、居住可能な建造物内の表面を処理するために本装置を用い得ることが好都合である。或る実施形態では、固定用メカニズム110は、レーザ光が照射される表面に取り外し可能に結合される。あるそのような実施形態によって、居住可能な建造物の内または外の比較的狭い囲まれた空間内において、本装置を用い得ると好都合である。
【0090】
図6Bに概略的に例示される実施形態では、固定用メカニズム110は一対の取り付けインターフェース111を有する。各々の取り付けインターフェース111は少なくとも1つの弾力性真空パッド112、少なくとも1つのインターフェース装着用装置114、少なくとも1つの真空導管116、少なくとも1つの装着用コネクタ118、および固定用メカニズム110の取り付けインターフェース111を位置決め用メカニズム121へと連結するように構成されたカプラ119を有する。図6Aおよび6Bに概略的に例示される実施形態は2つの取り付けインターフェース111の各々について2つの真空パッド112を有するが、他の実施形態は取り付けインターフェース111と真空パッド112のどのような構成または数も利用する。
【0091】
図7で例示される実施形態では、2つの真空パッド112はインターフェース装着用装置114へと連結される。或る実施形態では、真空パッド112は円形のゴムパッドを有し、建造物の上に置かれるとそれが効率的に気密領域を形成する。各々の真空パッド112は真空導管116(例えばフレキシブルホース)を介して少なくとも1つの真空発生器(図示せず)へと流体連結される。真空発生器は真空を作り出すために流体のパワー(例えば圧縮空気)を使用することが可能であり、あるいは外部の真空供給源を使用することが可能である。真空発生器は真空導管116を介して真空パッド112と建造物の間の気密領域から空気を引き抜き、それにより、気密領域の中に真空を作り出す。真空パッド112を可逆的に建造物へと固定する力を大気圧が供給する。
【0092】
インターフェース装着用装置114は剛性の金属製支持体を有し、その上に真空パッド112、装着用コネクタ118、およびカプラ119が装着される。或る実施形態では、装着用コネクタ118は、下記でさらに充分に説明されるように地上支持システム700へと取り外し可能に取り付けられる地上支持コネクタ118aを有することが可能である。他の実施形態では、装着用コネクタ118は下記でさらに充分に説明されるように懸架を基本とする支持システム800へと取り外し可能に取り付けられるように構成された少なくとも1つの懸架を基本とする支持コネクタ118bを有することが可能である。カプ
ラ119はインターフェース装着用装置114を位置決め用メカニズム121へと取り外し可能に連結するように構成される。或る実施形態では、カプラ119は少なくとも1つの突起部を有し、それが位置決め用メカニズム121内の少なくとも1つの対応する凹部へと接続可能である。
【0093】
代替選択肢の実施形態では、固定用メカニズム110は装置50を加工される建造物に固定するための他の技術を含むことが可能である。これらの他の技術は、限定はされないがウィンチ、装置50または擬似タンクトレッドに固定された吸引装置(例えばカップ、gekkomat、スカート)、建造物から懸架された移動足場、および剛性の踏み台を含む。これらの技術は固定用メカニズム110の或る実施形態の中で互いに組み合わされて使用されることもやはり可能である。
【0094】
・位置決め用メカニズム
レーザ操作システム100の或る実施形態は、加工される建造物の近辺にある間にレーザヘッド200を正確に移動させるための位置決め用メカニズム121を有する。図8は固定用メカニズム110の取り付けインターフェース111と共に位置決め用メカニズム121の一実施形態の拡大図を概略的に例示している。図8の位置決め用メカニズム121は第1の軸方向位置決めシステム130、第2の軸方向位置決めシステム150、インターフェース140、およびレーザヘッド受容部220を有する。第1の軸方向位置決めシステム130は少なくとも1つのカプラ132によって取り外し可能に固定用メカニズム110の取り付けインターフェース111へと連結される。インターフェース140(図8の実施形態では第1の部分品140aと第2の部分品140bを有する)は第2の軸方向位置決めシステム150を第1の軸方向位置決めシステム130へと取り外し可能に連結する。レーザヘッド受容部220は第2の軸方向位置決めシステム150へと取り外し可能に連結され、レーザヘッド200のハウジング230へと取り外し可能に連結されるように構成される。
【0095】
或る実施形態では、第1の軸方向位置決めシステム130は固定用メカニズム110のカプラ119の少なくとも1つの対応する突起部へと取り外し可能に接続可能である凹部を有する少なくとも1つのカプラ132を有する。そのような実施形態は位置決め用メカニズム121の輸送、保管、または保守管理のために都合良く解体および再組み立てされる。他の実施形態は固定用メカニズム110に固定して連結された第1の軸方向位置決めシステム130を有することが可能である。
【0096】
或る実施形態では、第1の軸方向位置決めシステム130は建造物の表面と実質的に平行の第1の方向でレーザヘッド200を移動させる。図9で概略的に例示される実施形態では、第1の軸方向位置決めシステム130はさらに第1のレール134、第1の駆動部136、および第1のステージ138を有する。第1のステージ138は第1の駆動部136の影響下で移動可能なように第1のレール134へと連結される。インターフェース140の第1の部分品140aは、第1の駆動部136が第1のレール134に沿ってインターフェース140を移動させるために使用されることが可能となるように固定して第1のステージ138へと連結される。或る実施形態では、第1の軸方向位置決めシステム130はさらにセンサ、リミットスイッチ、または第1のレール134に沿った第1のステージ138の位置に関する情報を提供する他の装置を有する。この情報は、この情報に応答して第1の駆動部136またはレーザ操作システム100の他の部品へと制御信号を送信するように構成される制御器500へと供給されることが可能である。
【0097】
範例の第1の駆動部136は、限定はされないが水圧式駆動部、圧空式駆動部、電気機械式駆動部、ネジ式駆動部、およびベルト式駆動部を含む。本願明細書に述べられた実施形態に適合する第1のレール134、第1の駆動部136、および第1のステージ138
はHamel,MinnesotaのTol−O−Matic,Inc.社から入手可能である。第1のレール134、第1の駆動部136、および第1のステージ138の他のタイプおよび構成もやはり本願明細書に述べられた実施形態に適合する。
【0098】
或る実施形態では、第2の軸方向位置決めシステム150は建造物の表面と実質的に平行の第2の方向でレーザヘッド200を移動させる。或る実施形態では第2の方向は第1の軸方向位置決めシステム130の第1の方向に対して実質的に直角である。図10で概略的に例示される実施形態では、第2の軸方向位置決めシステム150は第2のレール152、第2の駆動部154、および第2のステージ156を有する。或る実施形態では第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150はレーザヘッド200の直線的な移動を提供する。他の実施形態では、第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150はレーザヘッド200の円形および軸方向の移動をそれぞれ提供する。
【0099】
或る実施形態では、第2のステージ156は第2の駆動部154の影響下で移動可能なように第2のレール152へと連結される。レーザヘッド受容部220は、第2の駆動部154が第2のレール152に沿ってレーザヘッド受容部220を移動させるために使用されることが可能となるように取り外し可能に第2のステージ156へと連結される。或る実施形態では、第2の軸方向位置決めシステム150はさらにセンサ、リミットスイッチ、または第2のレール152に沿った第2のステージ156の位置に関する情報を提供する他の装置を有する。この情報は、この情報に応答して第2の駆動部154またはレーザ操作システム100の他の部品へと制御信号を送信するように構成される制御器500へと供給されることが可能である。
【0100】
範例の第2の駆動部154は、限定はされないが水圧式駆動部、圧空式駆動部、電気機械式駆動部、ネジ式駆動部、およびベルト式駆動部を含む。本願明細書に述べられた実施形態に適合する第2のレール152、第2の駆動部154、および第2のステージ156はHamel,MinnesotaのTol−O−Matic,Inc.社から入手可能である。第2のレール152、第2の駆動部154、および第2のステージ156の他のタイプおよび構成もやはり本願明細書に述べられた実施形態に適合する。
【0101】
或る実施形態では、第2のレール152はインターフェース140の第2の部分品140bへと固定式に連結される。第2の部分品140bは、インターフェース140の第1の部分品140aの少なくとも1つの対応する突起部へと取り外し可能に接続可能である少なくとも1つの凹部を有することが可能である。そのような実施形態は位置決め用メカニズム121の輸送、保管、または保守管理のために都合良く解体および再組み立てされる。他の実施形態では、インターフェース140は第1のステージ138と第2のレール152のうちの一方または両方へと取り外し可能に連結される単一片で作製されることが可能である。他の実施形態は都合の良い解体のために構成されていない(例えば、単一片で作製されたインターフェース140を有し、それが第1のステージ138と第2のレール152の両方へと固定式に連結される)。
【0102】
或る実施形態では、インターフェース140は第1のレール134と第2のレール152の間の相対的配向を調節するための傾斜メカニズム144を有する。図11Aに概略的に例示されるように、インターフェース140の第1の部分品140aは第1のレール134上の第1のステージ138へと連結され、インターフェース140の第2の部分品140bの対応する凹部と結合するように構成された一対の隆起142を有する。傾斜メカニズム144は第1のプレート145、蝶番146、第2のプレート147、および一対の支持支柱148を有する。第1のプレート145は第1のステージ138に固定式に装着され、固定用メカニズム110が装着される表面に対して実質的に平行である。第2の
プレート147は蝶番146によって枢動するように第1のプレート145へと連結され、支持支柱148によって定位置にロックされることが可能である。
【0103】
図11Aでは、第1のプレート145および第2のプレート147が互いに実質的に平行になるように傾斜メカニズム144が構成される。この構成では、レーザヘッド200の第1の方向と第2の方向によって規定される運動の平面は固定用メカニズム110が連結される表面に対して実質的に平行である。図11Bでは、第2のプレート147が第1のプレート145に相対して非ゼロの角度(例えば90度)になるように傾斜メカニズム144が構成される。この構成では、レーザヘッド200の第1の方向と第2の方向によって規定される運動の平面は固定用メカニズム110が連結される表面に相対して非ゼロの角度である。
【0104】
或る実施形態では、レーザヘッド受容部220は取り外し可能にレーザヘッド200のハウジング230へと連結される。図12は本願明細書に述べられた実施形態に適合するレーザヘッド受容部220を概略的に例示している。レーザヘッド受容部220は第2のステージ156に連結され、解放可能なクランプ222および第3の軸方向位置決めシステム224を有する。クランプ222はレーザヘッド200のハウジング230を保持するように構成される。第3の軸方向位置決めシステム224はレーザヘッド200と加工される建造物との間の相対的距離を調節するように構成される。或る実施形態では、第3の軸方向位置決めシステム224はネジ式駆動部を有し、それがクランプ222を第2のレール152に対して実質的に直角方向に移動させる。或る実施形態では、図12で概略的に例示されるようにネジ式駆動部はクランプ222を移動させるために回されることが可能なハンドル226によって手動で動かされる。他の実施形態では、ネジ式駆動部は制御器500からの制御信号に応答して機器によって自動的に制御される。
【0105】
・地上支持システム
或る実施形態では、装置50は取り外し可能に装置50へと連結される地上支持システム700を伴って利用されることが可能である。インターフェース装着用装置114は各々、取り外し可能に地上支持システム700へと結合するように構成された地上支持コネクタ118aを有する。地上支持システム700は、市販入手可能な引き上げもしくは位置決めタイプのシステムといった様々なタイプの外部ブームシステムに付随することが有利であり、それが装置50の重量のいくらかを支え、それにより、固定用メカニズム110によって支えられる重量負荷を軽減することが可能である。地上支持システム700は実質的に垂直の表面(例えば壁)または実質的に水平の表面(例えば天井)への装置50の使用を容易にするために使用されることが可能である。
【0106】
或る実施形態では、地上支持システム700は図13に概略的に例示されるような支持構造体710を有する。図13の支持構造体710はブームコネクタ712、回転式取り付け台714、スプレッダ部材716、一対の主柱718、および一対の副柱720を有する。ブームコネクタ712は選択される外部ブームシステムに取り付けられるように構成される。回転式取り付け台714は回転可能なようにブームコネクタ712へと連結され、かつ固定式でスプレッダ部材716へと連結され、それにより、ブームコネクタ712が支持構造体710に相対して都合良く回されることが可能となる。
【0107】
主柱718はスプレッダ部材716へと連結され、実質的に互いに平行である。主柱718の各々はインターフェース装着用装置114の地上支持コネクタ118aのうちの1つに連結されるように構成される。主柱718は、地上支持コネクタ118aと位置合わせされるように様々な位置でスプレッダ部材716へと各々連結されることが可能である。各々の主柱718はまた、副柱720へも連結され、かつそれらに対して実質的に直角である。そのような実施形態では、地上支持コネクタ118aに連結された主柱718を
有するのではなく、副柱720が地上支持コネクタ118aに連結され、それにより、固定用メカニズム110に相対して90度で支持構造体710を効率的に回転させることが可能である。都合の良いことに、そのような実施形態は建造物の様々な構成を加工するため、および特定の用途に最適の代替選択肢の構成を可能にするための調節可能性を提供する。
【0108】
・懸架を基本とする支持システム
場合によっては、装置50は取り外し可能に装置50へと連結される懸架を基本とする支持システム800を伴って利用されることが可能である。インターフェース装着用装置114は各々、取り外し可能に懸架を基本とする支持システム800へと結合するように構成された少なくとも1つの懸架を基本とする支持コネクタ118bを有することが可能である。都合の良いことに懸架を基本とする支持システム800は装置50の重量のいくらかを支え、それにより、固定用メカニズム110によって支えられる重量負荷を軽減する。懸架を基本とする支持システム800は実質的に垂直の表面(例えば外壁)への装置50の使用を容易にするために使用されることが可能である。
【0109】
或る実施形態では、図14Aに概略的に例示されるように懸架を基本とする支持システム800はウィンチ810、一次ケーブル812、および一対の二次ケーブル814を有する。ウィンチ810は加工される建造物の屋根またはその他の部分に位置付けられる。ウィンチ810は一次ケーブル812に連結され、それが二次ケーブル814へと連結される。二次ケーブル814は各々、固定用メカニズム110のインターフェース装着用装置114の懸架を基本とする支持コネクタ118bへと連結される。図14Bは懸架装置を基本とする支持コネクタ118bを有する装置の実施形態を概略的に例示している。その後、装置50は一次ケーブル814の機能する長さを短くするかまたは長くするためにウィンチ810によって下げられるかまたは上げられることが可能である。代替選択肢の実施形態では、地上支持コネクタ118aが地上支持コネクタ118bとしてもまた機能するように構成されることが可能である。
【0110】
・LMS:単純化された固定用メカニズム
図21A〜図21Dは本願明細書に述べられた実施形態による別の固定用メカニズム1110を概略的に例示している。固定用メカニズム1110は取り外し可能に建造物へと連結されるように構成された弾力性の真空パッド1112、取り外し可能にレーザヘッド1200へと取り付けられるように構成されたカプラ1114、およびハンドル1116を有する。4つの真空パッドの固定用メカニズム110および多軸方向位置決め用メカニズム121を有する上述のレーザ操作システム100とは異なり、固定用メカニズム1110は照射される建造物との関係で選択された位置に図20のレーザヘッド1200を取り外し可能に保持するための単純化されたメカニズムを供給する。
【0111】
或る実施形態では、真空パッド1112は建造物上に設置されると気密領域を効率的に形成する円形のゴムの膜(図示せず)を有する。真空パッド1112は、図21Dに示す、真空導管1113を介して少なくとも1つの真空発生器(図示せず)へと流体連結される。真空導管1113の例示的材料には、限定はしないが、可撓性のあるゴムホースが含まれる。ゴム膜と建造物の間の気密領域から真空導管を介して空気を引き抜くことによって、真空発生器が気密領域の中に真空を作り出す。固定用メカニズム1110を可逆的に建造物へと固定する力を大気圧が供給する。ある実施形態では、真空パッド112は、レーザヘッド1200を、重力に逆らうどんな方向にも保持するように構成される。例えば、図21Dに概略を図示した実施形態では、固定用メカニズム1110は、実質的に垂直なコンクリートの表面と接触するようにレーザヘッド1200を支持する。表面からの固定用メカニズム1110の取り外しはゴム膜と建造物の間の気密領域の中に空気を戻すことを可能にすることによって達成される。本願明細書に述べられた実施形態に適合する真
空パッド1112は様々な供給源から入手可能である。範例の真空パッド1112はリヒテンシュタイン公国、SchaanのHilti Corporation社から得られる376281−DD−CR−1 Complete Core Rig Standによって供給される。
【0112】
或る実施形態では、カプラ1114はレーザヘッド1200の対応するレーザヘッドカプラ1250と嵌合する構造を有する。図21Aで概略的に例示される固定用メカニズム1110に関すると、カプラ1114は真空パッド1112に取り付けられる少なくとも1つの突起部1115を有する。カプラ1114は、少なくとも1つの対応する凹部1116を有するレーザヘッドカプラ1250へと接続可能である。他の実施形態では、カプラ1114が凹部を有し、レーザヘッドカプラ1250が対応する突起部を有する。なおも別の実施形態では、図22Aで概略的に例示されるようにカプラ1114はレーザヘッド2200を保持するように適合されるカラー1117を有する。
【0113】
図21Cで概略的に例示されるように、なおも別の実施形態ではコネクタ1114が少なくとも1つのロッド1118を有し、レーザヘッド1200のカプラ1250が少なくとも1つのカラー1119を有する。図21Cの範例の実施形態では、カプラ1114は2つのロッド1118a、1118bを有し、レーザヘッドカプラ1250は2つのカラー1119a、1119bを有する。各々のカラー1119は、レーザヘッド1200がロッド1118の長さに沿って様々な場所に調節可能に位置決めされることが可能になるように取り外し可能に対応するロッド1118へと連結される。或るそのような実施形態では、レーザヘッド1200がロッド1118の周りで回されることを可能にするためにカラー1119はロッド1118に関して調節可能に回されることが可能である。例えば、図21Cで概略的に例示される実施形態では、一方のカラー1119aはその対応するロッド1118aから取り外されることが可能であり、他方のカラー1119bはその対応するロッド1118bの周りで回されることが可能である。そのような実施形態はレーザヘッド1200をその穴明け位置から離す方向に回す能力を供給し、それにより、穴明けされている穴の目視検査が為されることが可能となる。いったん目視検査が為されたならば、その後、レーザヘッド1200を回転させ、カラー1119aをその対応するロッド1118aと再度連結することによってレーザヘッド1200が穴明け位置へと戻して動かされることが可能である。
【0114】
或る実施形態では、ハンドル1116は固定用メカニズム1110を所望の場所に移送し、位置決めすることを容易にするように構成される。図21A〜21Dで概略的に例示されるものに加えてさらに別のハンドル1116の構成も、本願明細書に述べられた他の実施形態と互換性がある。
【0115】
そのような単純化された固定用メカニズム1110は、上述のように、建造物に穴を開けるかまたは貫通するためだけに装置が使用されるときに使用されることが可能である。或るそのような実施形態では、建造物を照射して選択された場所に穴を開けるためにレーザヘッド1200が位置決めされるように固定用メカニズム1110が取り外し可能に建造物に固定されることが可能である。そのような実施形態で第2の選択された場所に第2の穴を開けるために、第2の選択された場所で建造物を照射するためにレーザヘッド1200が再配置されるように固定用メカニズム1110が建造物から取り外されて動かされる。固定用メカニズム1110を(図6A、6B、7、および8の固定用メカニズム110と比較して)単純化し、かつ位置決め用メカニズム121の使用を避けることによって、そのような単純化された実施形態は一人の個人によって移動可能かつ位置決め可能であるさらに軽い重量の代替選択肢を提供する。付け加えると、そのような単純化された実施形態は図6A、図6B、図7、および図8に関連して述べられたそれらよりもさらに頑丈である。
【0116】
(制御器)
或る実施形態では、制御器500はレーザの基本ユニット300へと電気的に連結され、制御信号をレーザの基本ユニット300に送信するように構成される。他の実施形態では、制御器500はレーザの基本ユニット300とレーザ操作システム100の両方へと電気的に連結され、制御信号をレーザの基本ユニット300とレーザ操作システム100の両方に送信するように構成される。図15は本願明細書に述べられた実施形態による制御器500の実施形態を概略的に例示している。制御器500は制御パネル510、マイクロプロセッサ520、レーザ発生器のインターフェース530、位置決めシステムのインターフェース540、センサのインターフェース550、およびユーザインターフェース560を有する。
【0117】
或る実施形態では、制御パネル510は主電源、主電源スイッチ、非常用電力遮断スイッチ、および制御器500のその他の部品類に連結されるように構成された様々な電気的コネクタを有する。制御パネル510は外部電源(図15に示さず)へと連結され、装置50の様々な部品に電力を供給するように構成される。
【0118】
或る実施形態では、マイクロプロセッサ520はプログラマブル論理制御器型マイクロプロセッサ(PLC)を含むことが可能である。PLCは丈夫で信頼性があり、かつ構成することが容易であり、範例のPLCはMilwaukee,WisconsinのRockwell Automation社、Palatine,IllinoisのSchneider Electric社、およびMunich,GermanyのSiemens AG社から入手可能である。代替選択肢の実施形態では、マイクロプロセッサ520はパーソナルコンピュータのマイクロプロセッサ、またはPCモジュールに内蔵されているPC/104を含み、それらは容易で自在性のある導入を提供する。マイクロプロセッサ520は、所望の切削もしくは穴明けパターンを達成するために、(レーザ発生器インターフェース530および位置決め用システムインターフェース540を介して)装置50のその他の部品へと制御信号を送信することによって(ユーザインターフェース560を介した)ユーザ、ならびに(センサインターフェース550を介した)装置50のセンサからの入力信号に応答するように構成されることが可能である。
【0119】
マイクロプロセッサ520はハードウェア、ソフトウェア、またはそれら2つの組み合わせの中に導入されることが可能である。ハードウェアとソフトウェアの組み合わせの中に導入されるとき、ソフトウェアはプロセッサで読み取り可能な記憶媒体上にあることが可能である。付け加えると、或る実施形態のマイクロプロセッサ520は動作中に使用される情報を保持するためのメモリを有する。
【0120】
或る実施形態では、レーザ発生器インターフェース530はレーザの基本ユニット300へと連結され、マイクロプロセッサ520からレーザの基本ユニット300の様々な部品へと制御信号を送信するように構成される。例えば、レーザ発生器インターフェース530は、限定はされないがレーザパワーの出力レベルおよびレーザパルスのプロファイルとタイミングを含めた所望の動作パラメータを設定するために制御信号をレーザ発生器310へと送信することが可能である。付け加えると、レーザ発生器インターフェース530は適切な冷却レベルを設定するために冷却用サブシステム320に制御信号を送信することが可能であり、圧縮ガスの供給源が気体格納容器240の圧縮ガス注入口249へ、または抽出ポート248に連結された真空発生器へとつながれる。
【0121】
或る実施形態では、位置決め用システムインターフェース540はレーザ操作システム100の位置決め用メカニズム121へと連結され、上述したような第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150と適合する。或るそのよう
な実施形態では、位置決め用システムインターフェース540は第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150用のサーボ駆動部を有する。このサーボ駆動部はマイクロプロセッサ520からの制御信号に応答して第1の駆動部136および第2の駆動部154のための駆動用の電圧と電流を発生することが好ましい。この方式で、制御器500はどのようにしてレーザヘッド200が建造物の表面を横切って走査されるかを決定することが可能である。或る実施形態では、サーボ駆動部は制御器500の制御パネル510から電力を受け取る。位置決め用メカニズム121が第3の軸方向位置決めシステムをさらに有する実施形態では、位置決め用システムインターフェース540は制御器500がレーザヘッド200と加工される建造物表面との間の相対的距離を判定することが可能となるように適切なサーボ駆動部をさらに有する。
【0122】
或る実施形態では、センサインターフェース550は装置50の様々なセンサ(図15に示さず)へと連結され、動作パラメータが選択もしくは修正されるときにそれらがデータを提供する。例えば、上述したようにレーザヘッド200はレーザヘッド200と相互作用領域との間の相対的距離を測定するように構成されたセンサ250を有することが可能である。そのような実施形態のセンサインターフェース550はセンサ250からデータを受け取り、このデータをマイクロプロセッサ520へと供給する。その後、マイクロプロセッサ520はレーザの基本ユニット300および/またはレーザ操作システム100の様々な動作パラメータを適切なときにリアルタイムで調節することが可能である。センサインターフェース550を介して制御器500へと連結されることが可能なその他のセンサは、限定はされないが加工される表面に相対してレーザヘッド200が定位置にあることを確認するための近接センサ、様々な冷却、圧縮空気、および真空システムのための温度または流量センサ、および(下記でさらに充分に説明されるような)鉄筋検出器を含む。
【0123】
或る実施形態では、ユーザインターフェース560は装置50に関する情報をユーザに提供し、ユーザの入力を受け取ってマイクロプロセッサ520へと送信するように適合される。或る実施形態では、ユーザインターフェース560は制御用ペンダント570を有し、それが電気的にマイクロプロセッサ520へと連結される。図16に概略的に例示されるように、或る実施形態では制御用ペンダント570は画面572および複数のボタン574を有する。或る他の実施形態では、制御用ペンダント570は、複数のボタン574を含み、画面572から独立している。
【0124】
画面572は状態情報および動作パラメータ情報をユーザに表示するために使用されることが可能である。範例の画面572は、限定はされないが液晶ディスプレイを含む。ボタン574は、装置50の動作パラメータを設定するためにマイクロプロセッサ520によって使用されるデータをユーザが入力することを可能にするために使用されることが可能である。他の実施形態は、限定はされないがキーボード、マウス、タッチパッド、およびポテンショメータのノブおよび/またはダイアルを含めたユーザの入力を装置50に伝達するための他の技術を使用することが可能である。或る実施形態では、制御用ペンダント570は装置50に配線で接続され、その一方で他の実施形態では、制御用ペンダント570は遠隔で(例えば無線で)装置50と通信する。
【0125】
或る実施形態では、制御用ペンダント570は非常用停止ボタンおよびサイクル停止ボタンをさらに有する。非常用停止ボタンを押すと、装置50はすべての動きを即座に中止し、レーザ照射が即座に中断される。サイクル停止ボタンを押すと、装置50は同様にすべての動きを中止し、実行される切削手順に対応するレーザ照射を中断するが、しかしその後、ユーザは切削手順の出発点に戻るか、あるいは切削手順が停止された地点で切削を再開する選択肢を与えられる。或る実施形態では、制御用ペンダント570は「デッドマンスイッチ」をさらに有し、これは装置50が実行するためにユーザによって手動で作動
させられなければならない。そのようなスイッチは、いずれかの人間が制御用ペンダント570を積極的に使用しないと装置50が動作しないことを確実化することによって安全の対策を提供する。
【0126】
図17A〜図17Hは制御用ペンダント570の範例の画面表示のセットを例示している。画面572の左側と右側に沿ったボタン574の各々の機能は装置50の動作モードに応じて決まる。画面表示の各々は現在の動作モードに関する関連情報と共にシステムの状態に関する情報を提供する。
【0127】
図17Aの「MAIN SCREEN」表示は「Machine Status」領域、「System Status」領域、および制御用ペンダント570のボタン574のいくつか、またはすべての機能に対応するラベル領域を有する。「Machine Status」領域は、装置50が行なっている事項およびユーザが次に行なうことが可能な事項を記述する文章メッセージを含む。「System Status」領域は装置50の動作モードを示すボックスを有する。図17Aで例示される範例では、装置は「保守管理モード」にある。「System Status」領域はまた、限定はされないが固定用システム110の真空パッド112、空気または真空の圧力、第1の軸方向位置決めシステム130、および第2の軸方向位置決めシステム150を含めた装置50の様々な構成要素の状態を示す複数の状態ボックスも含む。「System Status」領域はまた、レーザの基本ユニット300で感知される何らかの過ちがあるかどうかを表示する。或る実施形態では、構成要素の公称上の状態が対応する状態ボックスで緑色で示される。装置50の準備完了状態は、緑色で現れるシステムの状態ボックスすべてを有することによって例示される。もしもこれらの構成要素のうちの1つの状態が動作パラメータから外れていると、対応する状態ボックスが赤色で示され、システムのインターロックが有効化されて装置50の動作を阻止する。開始すると、システムのインターロックが有効化され、装置50の動作の前に解除されなければならない。「Machine Status」領域の文章メッセージは、装置50を動作パラメータの範囲内に置くためおよびシステムのインターロックを解除するために実行されるべき行動に関する情報を提供する。システムのインターロックすべてを解除すると、「Machine Status」領域は装置50が使用準備完了状態であることを表示するであろう。
【0128】
図17Bの「SELECT OPERATION SCREEN」表示は「Machine Status」領域、「System Status」領域、およびボタン574のいくつか、またはすべての機能に対応するラベル領域を有する。「System Status」領域は第1の軸方向位置決めシステム130(長軸と称される)および第2の軸方向位置決めシステム150(短軸と称される)に沿ったレーザヘッド200の位置に関する情報を含む。ボタン574のうちのいくつかは様々な動作を有効化するように構成される。例えば、4つのボタン574は図17Bに例示されるように4つの異なる動作、すなわち円を描く、突き通す、直線切削する、および表面にキー形成する動作を有効化するように構成される。
【0129】
図17Cは装置50の円形の動作に関する情報を与える「CIRCLE SETUP/OPERATION SCREEN」表示を示しており、加工される建造物の表面に円形のパターンを所望の深さに切り込むようにレーザヘッド200が円形に移動する。或る実施形態では、円形動作は「穿孔による穴明け」のために使用されることが可能であり、それにより、中まで同質の円形の芯が切られ、表面から取り除かれて円形の穴を残す。
【0130】
「Circle Status」領域は円形動作の状態に関する情報および対応する命令をユーザに提供する。第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150に沿ったレーザヘッド200の始動位置が「System Statu
s」領域の中で与えられる。「Circle Parameters」領域は、限定はされないが円形パターンの周りでの周回の数、直径、切り込みが実行される時間的期間、円形の周りでのレーザヘッド200の移動速度、およびレーザの基本ユニット(LBU)のプログラム番号を含めた円形パターンの切削に付随する様々なパラメータに関する情報を提供する。或る実施形態ではLBUのプログラム番号は、限定はされないがビームの焦点および強度を含めたレーザヘッド200の動作パラメータに対応する。
【0131】
或る実施形態では、様々なパラメータは画面572上のパラメータに触れることによって変えられることが可能であり、そうすると数字のキーパッドが画面572上に現れ、それにより、新たな値が入力されることが可能になる。各々のパラメータについて、「set point」の値は現在メモリにある値であって入力された最後の値に対応する。「status」の値は選択された現在の値に対応する。新たなパラメータ値を保存すると、「status」および「set point」の値は同じである。「Auto/Dry Run」と標示されたボタン574aを押す操作は、所望の動作を確認するためにレーザビームを作動させずにレーザヘッド200の円運動を始動させるであろう。「Cycle Start」と標示されたボタン574bを押す操作は、レーザヘッド200の運動とレーザビームの作動の両方を含めた円形パターンの切削を始動させるであろう。「Cycle Stop」と標示されたボタン574cを押す操作は、中止された地点から切削および運動を再開する選択肢を伴なって切削および運動を中止もしくは中断させるであろう。「Machine Reset」と標示されたボタン574dを押す操作は、装置50を中間状態に置くであろう。切削の完了後に「Next」と標示されたボタン574eを押す操作は、「SELECT OPERATION SCREEN」へと戻すであろう。
【0132】
図17Dは、装置50の突き抜き動作に関する情報を提供する「PIERCE SETUP/OPERATION SCREEN」表示を示しており、レーザヘッド200は加工される建造物の表面に所望の深さの穴を開ける。「Pierce Status」領域は突き抜き動作の状態に関する情報および対応する命令をユーザに提供する。第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150に沿ったレーザヘッド200の始動位置が「System Status」領域の中で与えられる。「Pierce Parameters」領域は穴明けに付随する様々なパラメータに関する情報を提供する。レーザのパラメータは、限定はされないがレーザのパワー、レーザのスポットサイズ、および穴明けのための時間的期間(これらの各々は建造物に形成される結果の穴の直径を左右することが可能である)、およびLBUのプログラム番号を含む。これらのパラメータは上述のように変えられることが可能である。「Auto/Dry Run」、「Cycle Start」、「Cycle Stop」、「Machine Reset」、および「Next」と標示されたボタン574は上述されたように動作する。
【0133】
図17Eは、装置50の直線切削動作に関する情報を提供する「CUT SETUP/OPERATION SCREEN」表示を示しており、レーザヘッド200は加工される建造物の表面で所望の深さに直線切削を行なう。直線切削は装置50の軸のうちの1つに沿っていることが好ましい。「Cut Status」領域は切削動作の状態に関する情報および対応する命令をユーザに提供する。第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150に沿ったレーザヘッド200の始動位置が「System Status」領域の中で与えられる。「Cut Parameters」領域は、限定はされないがレーザヘッド200の移動速度、行なわれる切削の長さ、およびLBUのプログラム番号を含めた切削に付随する様々なパラメータに関する情報を提供する。これらのパラメータは上述のように変えられることが可能である。「Long Axis」および「Short Axis」と標示されたボタン574f、574gはレーザ
ヘッド200の移動の軸として第1の軸または第2の軸のそれぞれどちらかを選択するために使用される。「Auto/Dry Run」、「Cycle Start」、「Cycle Stop」、「Machine Reset」、および「Next」と標示されたボタン574は上述されたように動作する。
【0134】
図17Fは、装置50の表面キー形成動作に関する情報を提供する「SURFACE KEYING SETUP/OPERATION SCREEN」表示を示しており、レーザヘッド200は加工される建造物の表面に欠刻または楔キーを切削する。表面キー形成動作は所望の深さでかつ概して長方形の領域で表面に欠刻または「楔キー」を作製するために表面を横切ってレーザビームを走査させる工程を含む。或る実施形態では、表面キー形成動作は表面の「荒仕上げ」を行なうために使用されることが可能であり、それにより、表面は領域(例えば長方形)を横切るレーザビームとの相互作用によって粗面にされる。
【0135】
「Surface Keyjng Status」領域は表面キー形成動作の状態に関する情報および対応する命令をユーザに提供する。第1の軸方向位置決めシステム130および第2の軸方向位置決めシステム150に沿ったレーザヘッド200の始動位置が「System Status」領域の中で与えられる。「Surface Keying
Parameters」領域は、限定はされないがレーザヘッド200の移動速度、第1の軸および第2の軸に沿って作られるキーの長さ、装置50が第1の軸および第2の軸に沿った移動の間で増加させるであろうオフセットの長さ、およびLBUのプログラム番号を含めた切削に付随する様々なパラメータに関する情報を提供する。これらのパラメータは上述のように変えられることが可能である。「Long Axis」および「Short Axis」と標示されたボタン574f、574gはレーザヘッド200の移動の軸として第1の軸または第2の軸のそれぞれどちらかを選択するために使用される。「Auto/Dry Run」、「Cycle Start」、「Cycle Stop」、「Machine Reset」、および「Next」と標示されたボタン574は上述されたように動作する。
【0136】
図17Gは、検出された動作の過ちに関する情報を提供する「FAULT SCREEN」を示している。過ちは、モニタされるシステムのセンサ(例えば流量計、温度センサ、安全スイッチ、非常停止器)が非動作状態を検出すると発生し、装置50がいずれかの動作モードにあるとき、およびいずれかの画面が表示されているときに生じることが可能である。過ちが生じると、表示されている現在の画面の下端に過ちを表示するスクローリングメッセージが与えられることが好ましい。付け加えると、「Machine Status」領域は過ちを取り除くようにユーザに表示するであろう。「FAULT SCREEN」は適切なボタン574を押すことによって他の画面のいずれからもアクセスされることが可能である。図17Gに例示されるように、或る実施形態では「FAULT SCREEN」は検出された過ちを、限定はされないが日付けおよび過ちのタイプを含めた関連データを備えた一覧表で表示する。運転のために装置50を準備するために、検出された過ちがユーザによって取り除かれることが好ましい。検出された過ちを取り除いた後、ユーザは適切なボタン574(例えば「Acknowledge All」)を押して過ちに肯定応答することが可能である。もしも過ちが取り除かれなければ、ユーザは適切なボタン574(例えば「Machine Reset」)を押して過ちが生じたときに表示された画面に戻ることが可能である。再度「Machine Reset」ボタン574を押す操作がユーザを「MAIN SCREEN」に戻し、そこで装置50はリセットされることが可能である。
【0137】
図17Hは、装置50に関する情報を提供する「MAINTENANCE SCREEN」表示を示している。保守管理モードは「MAIN SCREEN」表示から適切なボ
タン574を押すことによってアクセスされることが可能である。保守管理モードでは、システムのインターロックがバイパスされ、したがって、ユーザは装置50あるいは装置50の近くの人間もしくは材料を傷つけることを避けるように特別の配慮を実行することが好ましい。「MAINTENANCE SCREEN」は適切な警告をユーザに表示することが可能である。
【0138】
保守管理モードは、装置50の過ちの状態に関係なく、装置50の様々な構成要素の動作をチェックする機会をユーザに提供する。例えば、保守管理モードで適切なボタン574を押すことによって真空システムがオンおよびオフに切り換えられることが可能であり、圧縮空気がソレノイドバルブを介してオンおよびオフに切り換えられることが可能であり、第1の駆動部136および第2の駆動部154がオンおよびオフに切り換えられることが可能である。付け加えると、第1の軸および第2の軸の初期設定走行スピードは、上述したように画面572を押して数字キーパッド表示を出現させることによって変えられることが可能である。
【0139】
「System Status」領域はまた、限定はされないが固定用システム110の真空パッド112、空気または真空の圧力、第1の軸方向位置決めシステム130、および第2の軸方向位置決めシステム150を含めた装置50の様々な構成要素の状態を示す複数の状態ボックスも含む。「System Status」領域はまた、レーザの基本ユニット300で感知される何らかの過ちがあるかどうかを表示する。或る実施形態では、構成要素の公称上の状態が対応する状態ボックスで緑色で示される。装置50の準備完了状態は、緑色で現れるシステムの状態ボックスすべてを有することによって例示される。もしもこれらの構成要素のうちの1つの状態が動作パラメータから外れていると、対応する状態ボックスが赤色で示される。
【0140】
「MAINTENANCE SCREEN」はまた、レーザヘッド200を第1の軸および第2の軸に沿って望み通りに移動させる能力も提供する。3つのボタン574のセットが第1の軸に沿ってレーザヘッド200をホームポジション、前方向、または後ろ方向へとそれぞれ移動させるように構成される。同様に、3つのボタン574の別のセットが第2の軸に沿ったレーザヘッド200の同様の移動のために構成される。ボタンのこれらのセットのための標示領域はこれら2つの軸に沿ったレーザヘッド200の位置に関する情報を含むことが可能である。
【0141】
(検出器)
或る実施形態では、制御器500は建造物を加工している間に建造物の中に埋め込まれた材料を検出し、かつ検出信号を制御器500へと送信するように構成された検出器600へと連結される。或る実施形態では、制御器500は適切な制御信号をレーザの基本ユニット300へ、またはレーザの基本ユニット300およびレーザ操作システム100の両方へと送信することによって、埋め込まれた材料を大幅に傷つけることを回避するように構成される。或る実施形態では、検出器600は加工中に相互作用領域から発射される光を利用して埋め込まれた材料を検出するように構成される。
【0142】
埋め込まれた材料を検出するための様々な技術が本願明細書に述べられた実施形態に適合する。加工中に相互作用領域から発射される光のスペクトル分析は相互作用領域内の物質の化学組成に関する情報を提供することが可能である。光の波長および/または強度を分析することによって、加熱された物質の組成およびその温度を判定することが可能である。分光学的情報を使用すると、或る実施形態では埋め込まれた材料の検出は加工中の光スペクトルの変化のモニタリングに依存する。埋め込まれた材料、限定ではないが例を挙げるとコンクリートに埋め込まれた鉄筋(例えばスチール)のような材料の組成の違いでもって、様々な物質に関する融点および沸点のばらつきは埋め込まれた材料にレーザ光が
衝突して加熱するときの光の量および/または光の波長に気付くことが可能な変化を作り出すであろう。
【0143】
図18Aは本願明細書に述べられた実施形態に適合する検出器600を概略的に例示している。検出器600は光線平行化レンズ610、光ファイバ620、および分光器630を有する。或る実施形態の分光器630は入り口スリット631、光学グレーティング632、集光レンズ633、および光センサ634を有する。光線平行化レンズ610は相互作用領域から発射される光を受け取り、その光を光ファイバ620へと方向付けるように位置決めされる。その後、光ファイバ620がその光を分光器630に供給し、光は入り口スリット631を通って分光器630の光学グレーティング632へと送られる。光学グレーティング632は光を波長のスペクトルへと分離する。選択された波長範囲を有する分離された光はその後、集光レンズ633を通じて光センサ634上に方向付けられ、それがその波長範囲の光の強度に対応する信号を発生する。
【0144】
或る実施形態では、検出器600の少なくとも一部分はレーザヘッド200上に装着される。光線平行化レンズ610がレーザヘッド200の一部である実施形態では、相互作用領域から出る光を受け取るように光線平行化レンズ610は発射レーザ光の軸の近くに位置決めされることが可能である。そのような実施形態では、光線平行化レンズ610はノズル244の背後にあって窓243のように圧縮空気注入口249から入る圧縮空気によって保護されることが可能である。或る実施形態では光線平行化レンズ610はレーザビームと同軸であり、その一方で他の実施形態では、光線平行化レンズ610は軸から外れて配置される。限定はされないが、範例の光線平行化レンズ610はDunedin,FloridaのOcean Optics社から入手されるUV−74を含む。
【0145】
或る実施形態では、光ファイバ620はレーザヘッド200から分光器630へと送られる光の充分に低い減衰を提供するように選択された材料を含む。光ファイバ620のための範例の材料は、限定はされないがシリカおよび石英ガラスを含む。或る実施形態では、光ファイバ620は純石英ガラスのコア、ドープされた石英ガラスのクラッド層、およびポリイミドのバッファコーティングを有する。付け加えると、或る実施形態の光ファイバ620は外側ジャケット(例えばTeflon(登録商標)、Tefzel(登録商標)、Kevlar(登録商標)、およびそれらの組み合わせ)およびステンレススチールの外殻によって保護される。付け加えると、或る実施形態の光ファイバ620は直角を成すファイバ取り付け台を使用してレーザヘッド200へと接続可能である。他のタイプの光ファイバ620と取り付け台の構成が本願明細書に述べられた実施形態に適合する。範例の光ファイバ620は、限定はされないがDunedin,FloridaのOcean Optics社から入手されるP400−2−UV/VISを含む。
【0146】
或る実施形態では、分光器630は調節可能な入り口スリット631を有する。或る実施形態の入り口スリット631は約1ミリメートルの高さ、および約5ミクロンと約200ミクロンの間の範囲の幅を有する。入り口スリット631は分光器630に入る光の量を決定する。入り口スリット631の幅は光センサ634の解像度に影響を与える。例えば、或る実施形態では、約5ミクロンの入り口スリットの幅は約3画素の解像度に相当し、約200ミクロンの入り口スリットの幅は約24画素の解像度に相当する。入り口スリット631の幅は充分な光の透過ならびに充分な解像度を供給するように選択されることが好都合である。
【0147】
或る実施形態の光学グレーティング632は入り口スリット631から光を受け取り、光の様々な波長成分を光の波長に応じて決まる対応する角度で屈折させる。この方式で、光学グレーティング632は光の様々な波長成分を分離する。或る実施形態では、光学グレーティング632と入り口スリット631から入る光との間の角度が(例えば光学グレ
ーティング632を移動させることによって)走査され、それにより、光センサ634に到達する波長成分を走査する。光学グレーティング632を利用する範例の分光器630は、限定はされないがDunedin,FloridaのOcean Optics社から入手されるUSB2000(VIS/UV)を含む。
【0148】
或る実施形態では、分光器630の集光レンズ633は光センサ634の受光効率を高めるように構成される。或る実施形態では、集光レンズ633は光センサ634上に固定された円筒状レンズを含む。集光レンズ633のそのような実施形態は都合の良いことに大口径の(入り口スリット631の幅または光ファイバ620のサイズによって制限される)入り口開口および低い光レベルの用途で有用である。付け加えると、或る実施形態では、集光レンズ633は光センサ634に到達する迷光の量を減らすことによって分光器630の効率を高める。入り口スリット631、光学グレーティング632、および集光レンズ633の他の構成を伴った他の分光器630が本願明細書に述べられた実施形態に適合する。
【0149】
或る実施形態では、検出システム600は図18Bで概略的に例示されるように分光器630に連結されたコンピュータシステム640を有する。コンピュータシステム640は結果的に得られる分光データを分析するように構成される。或る実施形態のコンピュータシステム640はマイクロプロセッサ641、メモリサブシステム642、およびディスプレイ643を有する。コンピュータシステム640にさらに堅牢性を与えるために、マイクロプロセッサ641およびメモリサブシステム642は、アクセスを容易にするように筐体の1つまたは複数の側板に入力と出力のパワーおよび信号の接続部を備えたNational Electrical Manufacturers Association(NEMA)定格の筐体644の中に装着されることが可能である。或る実施形態ではコンピュータシステム640は壁コンセントから110Vで電力供給され、その一方で或る実施形態では、停電の事態に機能を保証するためにコンピュータシステム630はバッテリーバックアップ用電源(図示せず)をさらに有する。
【0150】
或る実施形態ではマイクロプロセッサ641はPentium−200マイクロプロセッサチップを含み、その一方で他の実施形態では、マイクロプロセッサ641はPentium−III、850MHzのマイクロプロセッサチップを含む。或る実施形態では、メモリサブシステム642はハードディスクドライブを含む。他のタイプのマイクロプロセッサ641およびメモリサブシステム642が本願明細書に述べられた実施形態に適合する。
【0151】
或る実施形態では、ディスプレイ643は薄膜トランジスタ(TFT)のタッチスクリーン型ディスプレイを含む。分光学的結果をユーザに表示するために使用されることに加えて、そのようなタッチスクリーン型ディスプレイは様々な動作パラメータを変えるために検出器600への入力をユーザに提供するために使用されることが可能である。
【0152】
分光器630は建造物内の様々な埋め込まれた材料に付随する特定の波長をモニタすることが可能である。或る実施形態では、分光器630は光の相対的強度をこれらの波長で、またはこれらの波長に近いスペクトル領域でモニタすることが可能である。付け加えると、分光器630に到達する光を削減してスペクトル分析性能を向上させるために少なくとも1つの減光フィルタが使用されることが可能である。
【0153】
或る実施形態では、分光器630は特定の波長の強度およびこの波長の両側での強度をモニタする。或る実施形態の分光器630は開けられる穴の増大する深さから結果的に生じる強度の減少もやはりモニタする。図19はコンクリートをレーザ光で照射して検出される波長の光スペクトルおよび埋め込まれた鉄筋を照射して検出される光スペクトルの範
例のグラフを示している。コンクリートからのスペクトルは約592ナノメートルの波長に発光ピークを示している。鉄筋からのスペクトルはこの発光ピークを有さず、代わりにほぼ同じ波長に吸収による深い落ち込みを示している。したがって、埋め込まれた鉄筋がレーザ光で切削されているかどうかのリアルタイムの表示を与えるために約592ナノメートルの発光スペクトルが使用されることが可能である。例えば、約588.5ナノメートル、592ナノメートル、および593ナノメートルの発光スペクトルをサンプリングし、比(2×I592)/(I593+I588.5)を計算することによって592ナノメートルのスペクトルに谷またはピークのどちらが存在するかを検出器600が推定する実施形態では、検出器600は発光スペクトルがコンクリートに対応する落ち込みを有するか、または埋め込まれた鉄筋に対応するピークを有するか判定することが可能である。他の分光学的データが他の実施形態に使用されることが可能である。
【0154】
或る実施形態では、検出器600は上限カットオフ波長(例えば582ナノメートル)と下限カットオフ波長(例えば600ナノメートル)によって規定されるスペクトル領域を検査し、埋め込まれた鉄筋の検出または非検出のスペクトル比R特性を判定する。図23は本願明細書に述べられた実施形態によるスペクトル比Rを判定するための範例の方法2500のフローチャートである。方法2500は穴が深くなるときの相互作用領域からの光の変化に対処していない。
【0155】
或る実施形態では、方法2500はスペクトル領域の中のデータが選択された振幅範囲と比較される操作ブロック2510を有する。もしもいずれかのデータがその振幅範囲の外側に外れると、そのスペクトルは埋め込まれた鉄筋の非検出に相当すると見なされる。
【0156】
或る実施形態では、方法2500は谷および2つのピークの存在を判定するようにスペクトル領域のデータを分析する工程をさらに含む。或る実施形態では、この分析はスペクトル領域のデータが谷を含むかどうかを操作ブロック2520で判定する工程を含む。もしも谷が存在すると判定されると、操作ブロック2530で谷の値Vが計算され、そのスペクトル領域のデータが2つのピークを含むかどうかを判定するために操作ブロック2540でスペクトル領域が分析される。或る実施形態では、谷の値Vは谷のデータの振幅に相当する。或る実施形態では、谷の値Vを計算する工程はスペクトル領域の第1の部分でのデータの最小値を判定する工程を含む。或る実施形態では、スペクトル領域の第1の部分は約588ナノメートルと約594ナノメートルの間の波長範囲に相当する。
【0157】
もしもスペクトル領域のデータが2つのピークを含むと判定されると、操作ブロック2550でピークの値Pが計算され、操作ブロック2560で谷の値Vをピークの値Pで除算することによってスペクトル比Rが計算される。或る実施形態では、ピークの値Pは2つのピークの値を平均化することによって計算される。もしもスペクトル比Rが1以上であれば、そのスペクトルは埋め込まれた鉄筋の検出に相当すると見なされる。
【0158】
もしもスペクトル領域のデータが2つのピークを含まないと判定されると、或る実施形態では操作ブロック2570で第1の極大値M1がスペクトル領域の第2の部分のデータから計算され、操作ブロック2580で第2の極大値M2がスペクトル領域の第3の部分から計算される。或る実施形態では、スペクトル領域の第2の部分は約582ナノメートルから約588ナノメートルの波長範囲に相当し、スペクトル領域の第3の部分は約594ナノメートルから約600ナノメートルの波長範囲に相当する。或る実施形態では、第1の極大値M1はスペクトル領域の第2の部分の中の最大のデータ振幅に相当し、第2の極大値M2はスペクトル領域の第3の部分の中の最大のデータ振幅に相当する。或る実施形態では、ピークの値Pは操作ブロック2590で第1の極大値M1と第2の極大値M2を平均化することによって計算される。そのような実施形態では、スペクトル比Rは操作ブロック2600で谷の値Vをピークの値Pで除算することによって計算される。もしも
スペクトル比Rが1以上であれば、そのスペクトルは埋め込まれた鉄筋の検出に相当すると見なされる。
【0159】
もしもスペクトル領域のデータに谷が存在しないと判定されると、操作ブロック2610でピークの値P’が計算され、操作ブロック2620でピークの値P’が予め決められた閾値Tと比較される。スペクトル領域が1つまたは複数のピークを有する或る実施形態では、ピークの値P’を計算する工程はスペクトル領域内で検出されたいずれかのピークの強度値を平均化する工程を含む。もしもピークの値P’が閾値Tよりも小さい場合、スペクトルは埋め込まれた鉄筋の検出に相当すると見なされる。
【0160】
埋め込まれた材料を検出するための代替選択肢の技術は高速シャッタによるモニタリングを使用する。この取り組み方は加工される材料とレーザ光の間の相互作用の個別の変化をモニタするために結合静電容量形放電(Coupled Capacitance Discharge(CCD))カメラシステムの進歩を利用する。さらに新しいCCDカメラは時間を短縮することが可能なシステムを有し、シャッタは約0.0001秒で開く。このスピードで、レーザ光と加工される材料の間の相互作用の多くの特徴を見ることが可能である。付け加えると、レーザ光と加工される材料の白熱する相互作用から観察される輝きを削減し、相互作用をさらに良好に画像化するために減光フィルタが使用されることが可能である。
【0161】
本願明細書に開示された様々な実施形態の数多くの代替例、改造例、および変形例が当業者に明らかであろうが、それらはすべて本発明の精神および範囲の中にあると予想され、かつ意図される。例えば、特定の実施形態が詳細に述べられてきたけれども、様々なタイプの置き換えおよび/または追加あるいは代替の材料、素子の相対的配列、および寸法の構成を組み入れるために前述の実施形態および変形例が改造され得ることを当業者は理解するであろう。したがって、たとえ本発明のわずかの変形例しか本願明細書に述べられていないとしても、そのような追加的な改造例および変形例および同等例が添付の特許請求項に規定されるような本発明の精神および範囲の中にあることは理解されるべきである。
【0162】
添付の特許請求項の中のすべての手段もしくは工程に機能素子を加えたものの相当する構造、材料、作用、および同等例は、特に権利主張されるように他の権利主張される要素との組み合わせで機能を実行するためのいずれの構造、材料、または作用も含むと意図される。
【図面の簡単な説明】
【0163】
【図1】建造物の表面を加工するための装置の実施形態を例示する概略図である。
【図2】本願明細書に述べられた実施形態に適合するレーザの基本ユニットを例示する概略図である。
【図3A】本願明細書に述べられた実施形態によるレーザヘッドを例示する概略図である。
【図3B】レーザヘッドの2つの代替選択肢の実施形態を例示する概略図である。
【図3C】レーザヘッドの2つの代替選択肢の実施形態を例示する概略図である。
【図4】本願明細書に述べられた実施形態による気体格納容器の断面を例示する概略図である。
【図5】レーザヘッドと相互作用領域の間の相対距離を測定するように構成されたセンサを有するレーザヘッドを例示する概略図である。
【図6A】レーザ操作システムが、取り外し可能に建造物へと連結されるように構成された固定用メカニズムおよび固定用メカニズムへと連結され、かつレーザヘッドへと連結される位置決め用メカニズムを有する実施形態を概略的に例示する立面図である。
【図6B】レーザ操作システムが、取り外し可能に建造物へと連結されるように構成された固定用メカニズムおよび固定用メカニズムへと連結され、かつレーザヘッドへと連結される位置決め用メカニズムを有する実施形態を概略的に例示する反対側の立面図である。
【図7】固定用メカニズムの取り付けインターフェースの実施形態を例示する概略図である。
【図8】固定用メカニズムの取り付けインターフェースと共に位置決め用メカニズムの一実施形態を概略で例示する拡大図である。
【図9】第1の軸の位置決めシステムの実施形態を例示する概略図である。
【図10】第2の軸の位置決めシステムの実施形態を例示する概略図である。
【図11A】1つの代替選択肢の構造でインターフェースの実施形態を例示する概略図である。
【図11B】1つの代替選択肢の構造でインターフェースの実施形態を例示する概略図である。
【図12】レーザヘッド受容部の実施形態を例示する概略図である。
【図13】装置の他の部品に連結された支持構造体の実施形態を例示する概略図である。
【図14A】装置に連結され、懸架装置を基本とする支持システムの実施形態を例示する概略図である。
【図14B】懸架装置を基本とする支持コネクタを有する装置の実施形態を例示する概略図である。
【図15】制御パネル、マイクロプロセッサ、レーザ発生器のインターフェース、位置決めシステムのインターフェース、センサのインターフェース、およびユーザインターフェースを有する制御器の実施形態を例示する概略図である。
【図16】画面および複数のボタンを有する制御用ペンダントを例示する概略図である。
【図17A】制御用付属物の範例の「MAIN SCREEN」表示を例示する概略図である。
【図17B】制御用付属物の範例の「SELECT OPERATION SCREEN」表示を例示する概略図である。
【図17C】制御用付属物の範例の「CIRCLE SETUP/OPERATION SCREEN」表示を例示する概略図である。
【図17D】制御用付属物の範例の「PIERCE SETUP/OPERATION SCREEN」表示を例示する概略図である。
【図17E】制御用付属物の範例の「CUT SETUP/OPERATION SCREEN」表示を例示する概略図である。
【図17F】制御用付属物の範例の「SURFACE KEYING SETUP/OPERATION SCREEN」表示を例示する概略図である。
【図17G】制御用付属物の範例の「FAULT SCREEN」表示を例示する概略図である。
【図17H】制御用付属物の範例の「MAINTENANCE SCREEN」表示を例示する概略図である。
【図18A】本願明細書に述べられた実施形態に適合する検出器を例示する概略図である。
【図18B】結果として得られる分光学的データを分析するように構成されたコンピュータシステムを例示する概略図である。
【図19】コンクリートをレーザ光で照射して検出される波長の光スペクトルおよび埋め込まれた鉄筋を伴うコンクリートを照射して検出される光スペクトルを示すグラフである。
【図20】本願明細書に述べられた実施形態によるレーザヘッドの例示的な小型の構造を例示する概略図である。
【図21A】本願明細書に述べられた実施形態による種々の固定用メカニズムを例示する概略図である。
【図21B】本願明細書に述べられた実施形態による種々の固定用メカニズムを例示する概略図である。
【図21C】本願明細書に述べられた実施形態による種々の固定用メカニズムを例示する概略図である。
【図21D】本願明細書に述べられた実施形態によるレーザヘッドおよび固定用メカニズムの例示的な小型構造を示す図である。
【図22A】本願明細書に述べられた実施形態によるレーザヘッドの軽量構造を示す概略図である。
【図22B】本願明細書に述べられた実施形態によるレーザヘッドおよび固定用メカニズムの別の例示的な軽量構造を示す図である。
【図22C】図22Bのレーザヘッドに結合された気体格納器を示す概略図である。
【図23】本願明細書に述べられた実施形態によるスペクトル比を測定するための例示的方法のフローチャートである。
【特許請求の範囲】
【請求項1】
居住可能な建造物の表面を加工する装置であって、
レーザの基本ユニットであって、前記表面の相互作用領域にレーザ光を照射し、当該レーザ光は、前記建造物から材料を取り除き、前記レーザの基本ユニットは、レーザ発生器と、当該レーザ発生器に結合されるレーザヘッドとを備え、当該レーザヘッドは、材料を閉じ込め前記相互作用領域から除去する気体格納器を備え、当該気体格納器は、ゴム製シールを含み、当該シールは、前記建造物と接触し実質的に前記相互作用領域を囲むので、材料の閉じ込めおよび前記相互作用領域からの除去が促進され、前記建造物内における活動に対する妨害が少なくなり得るゴム製シールを含む、レーザの基本ユニットと、
前記建造物に取り外し可能に結合され、前記レーザヘッドに取り外し可能に結合される固定用メカニズムと、
前記レーザの基本ユニットに電気的に接続され、使用者の入力に応答して前記レーザの基本ユニットに制御信号を送信する制御器と、
を備える装置。
【請求項2】
前記レーザヘッドは、前記レーザ発生器に取り外し可能に結合され、前記制御器は、前記レーザの基本ユニットに取り外し可能に結合され、それにより、前記装置は、建造物の近傍またはその内部の場所への前記装置の輸送を促進し得るように、可逆的に組立・分解され得る請求項1に記載の装置。
【請求項3】
前記レーザ発生器は、アーク放電ランプで励起されるNd:YAGレーザを含む請求項1に記載の装置。
【請求項4】
前記レーザ発生器は、ファイバレーザを含む請求項1に記載の装置。
【請求項5】
前記レーザヘッドには、前記レーザ発生器からのレーザ光を受け取り、当該レーザ光を前記相互作用領域に向けるように適合されたレーザ光学素子が含まれる請求項1に記載の装置。
【請求項6】
前記レーザヘッドには、イッテルビウム:イットリウム・アルミニウム・ガーネット(Yb:YAG)ファイバレーザが含まれる請求項1に記載の装置。
【請求項7】
前記気体格納器は、当該気体格納器から前記相互作用領域へ放出される騒音および光を減少させるようにさらに適合される請求項1に記載の装置。
【請求項8】
前記気体格納器には、当該気体格納器から材料を除去する通路を提供する抽出ポートが含まれる請求項1に記載の装置。
【請求項9】
前記レーザヘッドには、ディスクレーザが含まれる請求項1に記載の装置。
【請求項10】
前記レーザヘッドは、1つまたはそれ以上のセンサを含み、当該センサは、前記レーザヘッドが前記居住可能な建造物の表面と接触しているか否か、前記レーザヘッドが前記固定用メカニズムに結合されているか否か、および前記レーザ発生器がオンになっているかまたは始動しているか否かの1つまたはそれ以上を検出する請求項1に記載の装置。
【請求項11】
前記レーザヘッドは、ノズルを備え、当該ノズルは、圧縮ガス供給部に流体連結され、圧縮ガスの流れを前記相互作用領域に向けるように適合されている請求項1に記載の装置。
【請求項12】
前記固定用メカニズムは、少なくとも1つの真空発生器に結合される1つまたはそれ以上の弾力性の真空パッドを備える請求項1に記載の装置。
【請求項13】
検出器をさらに備え、当該検出器は、前記制御器に結合され、前記建造物を加工しながら前記建造物内に埋め込まれている材料を検出し、検出信号を前記制御器に送信するように適合され、前記制御器は、適切な制御信号を前記レーザの基本ユニットに送信することにより、前記埋め込まれている材料に実質的に損傷を与えることを避けるように適合されている請求項1に記載の装置。
【請求項14】
前記検出器は、加工中に前記相互作用領域により放射される光を用いることにより、埋め込まれている材料を検出するように適合されている請求項13に記載の装置。
【請求項15】
前記固定用メカニズムは、前記居住可能な建造物内の表面に取り外し可能に結合される請求項1に記載の装置。
【請求項16】
前記固定用メカニズムは、前記レーザヘッドにより照射されている前記表面に取り外し可能に結合される請求項1に記載の装置。
【請求項17】
照射されている前記表面は、前記居住可能な建造物内にある請求項1に記載の装置。
【請求項18】
居住可能な建造物内における活動に対する妨害を減少させて前記建造物の表面を加工する装置であって、
レーザ光を発生させるための手段と、
前記建造物から材料を除去するように、前記レーザ光を前記建造物の相互作用領域に供給するための手段と、
前記材料を閉じ込めて前記相互作用領域から除去するための手段であって、前記相互作用領域を実質的に取り囲むゴム製シールを含む除去手段と、
使用者の入力に応答して前記レーザ光を制御するための手段と、
を備える装置。
【請求項19】
居住可能な建造物内における活動に対する妨害を減少させて前記建造物の表面を加工する方法であって、
レーザ光を遠隔地で発生させるステップと、
前記表面に前記レーザ光を供給するステップであって、当該レーザ光は、前記建造物から材料を除去するように、相互作用領域内の前記建造物と相互作用するレーザ光供給ステップと、
前記材料を閉じ込め前記相互作用領域から除去するステップであって、前記材料は、前記相互作用領域を実質的に取り囲むゴム製シールにより閉じ込められる除去ステップと、
使用者の入力に応答して前記レーザ光を制御するステップと、
を含む方法。
【請求項1】
居住可能な建造物の表面を加工する装置であって、
レーザの基本ユニットであって、前記表面の相互作用領域にレーザ光を照射し、当該レーザ光は、前記建造物から材料を取り除き、前記レーザの基本ユニットは、レーザ発生器と、当該レーザ発生器に結合されるレーザヘッドとを備え、当該レーザヘッドは、材料を閉じ込め前記相互作用領域から除去する気体格納器を備え、当該気体格納器は、ゴム製シールを含み、当該シールは、前記建造物と接触し実質的に前記相互作用領域を囲むので、材料の閉じ込めおよび前記相互作用領域からの除去が促進され、前記建造物内における活動に対する妨害が少なくなり得るゴム製シールを含む、レーザの基本ユニットと、
前記建造物に取り外し可能に結合され、前記レーザヘッドに取り外し可能に結合される固定用メカニズムと、
前記レーザの基本ユニットに電気的に接続され、使用者の入力に応答して前記レーザの基本ユニットに制御信号を送信する制御器と、
を備える装置。
【請求項2】
前記レーザヘッドは、前記レーザ発生器に取り外し可能に結合され、前記制御器は、前記レーザの基本ユニットに取り外し可能に結合され、それにより、前記装置は、建造物の近傍またはその内部の場所への前記装置の輸送を促進し得るように、可逆的に組立・分解され得る請求項1に記載の装置。
【請求項3】
前記レーザ発生器は、アーク放電ランプで励起されるNd:YAGレーザを含む請求項1に記載の装置。
【請求項4】
前記レーザ発生器は、ファイバレーザを含む請求項1に記載の装置。
【請求項5】
前記レーザヘッドには、前記レーザ発生器からのレーザ光を受け取り、当該レーザ光を前記相互作用領域に向けるように適合されたレーザ光学素子が含まれる請求項1に記載の装置。
【請求項6】
前記レーザヘッドには、イッテルビウム:イットリウム・アルミニウム・ガーネット(Yb:YAG)ファイバレーザが含まれる請求項1に記載の装置。
【請求項7】
前記気体格納器は、当該気体格納器から前記相互作用領域へ放出される騒音および光を減少させるようにさらに適合される請求項1に記載の装置。
【請求項8】
前記気体格納器には、当該気体格納器から材料を除去する通路を提供する抽出ポートが含まれる請求項1に記載の装置。
【請求項9】
前記レーザヘッドには、ディスクレーザが含まれる請求項1に記載の装置。
【請求項10】
前記レーザヘッドは、1つまたはそれ以上のセンサを含み、当該センサは、前記レーザヘッドが前記居住可能な建造物の表面と接触しているか否か、前記レーザヘッドが前記固定用メカニズムに結合されているか否か、および前記レーザ発生器がオンになっているかまたは始動しているか否かの1つまたはそれ以上を検出する請求項1に記載の装置。
【請求項11】
前記レーザヘッドは、ノズルを備え、当該ノズルは、圧縮ガス供給部に流体連結され、圧縮ガスの流れを前記相互作用領域に向けるように適合されている請求項1に記載の装置。
【請求項12】
前記固定用メカニズムは、少なくとも1つの真空発生器に結合される1つまたはそれ以上の弾力性の真空パッドを備える請求項1に記載の装置。
【請求項13】
検出器をさらに備え、当該検出器は、前記制御器に結合され、前記建造物を加工しながら前記建造物内に埋め込まれている材料を検出し、検出信号を前記制御器に送信するように適合され、前記制御器は、適切な制御信号を前記レーザの基本ユニットに送信することにより、前記埋め込まれている材料に実質的に損傷を与えることを避けるように適合されている請求項1に記載の装置。
【請求項14】
前記検出器は、加工中に前記相互作用領域により放射される光を用いることにより、埋め込まれている材料を検出するように適合されている請求項13に記載の装置。
【請求項15】
前記固定用メカニズムは、前記居住可能な建造物内の表面に取り外し可能に結合される請求項1に記載の装置。
【請求項16】
前記固定用メカニズムは、前記レーザヘッドにより照射されている前記表面に取り外し可能に結合される請求項1に記載の装置。
【請求項17】
照射されている前記表面は、前記居住可能な建造物内にある請求項1に記載の装置。
【請求項18】
居住可能な建造物内における活動に対する妨害を減少させて前記建造物の表面を加工する装置であって、
レーザ光を発生させるための手段と、
前記建造物から材料を除去するように、前記レーザ光を前記建造物の相互作用領域に供給するための手段と、
前記材料を閉じ込めて前記相互作用領域から除去するための手段であって、前記相互作用領域を実質的に取り囲むゴム製シールを含む除去手段と、
使用者の入力に応答して前記レーザ光を制御するための手段と、
を備える装置。
【請求項19】
居住可能な建造物内における活動に対する妨害を減少させて前記建造物の表面を加工する方法であって、
レーザ光を遠隔地で発生させるステップと、
前記表面に前記レーザ光を供給するステップであって、当該レーザ光は、前記建造物から材料を除去するように、相互作用領域内の前記建造物と相互作用するレーザ光供給ステップと、
前記材料を閉じ込め前記相互作用領域から除去するステップであって、前記材料は、前記相互作用領域を実質的に取り囲むゴム製シールにより閉じ込められる除去ステップと、
使用者の入力に応答して前記レーザ光を制御するステップと、
を含む方法。
【図1】


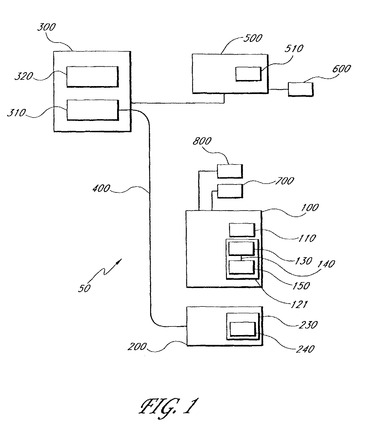
【図2】
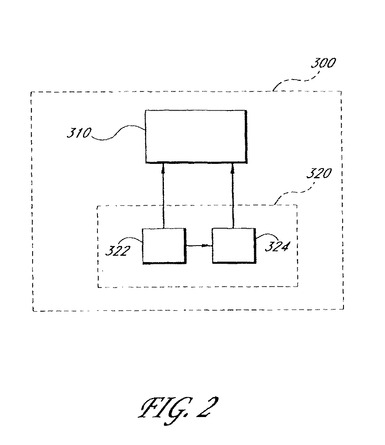
【図3A】
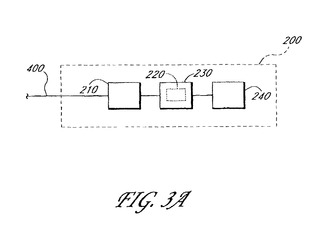
【図3B】
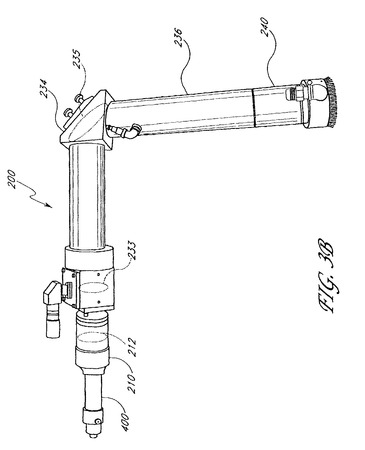
【図3C】
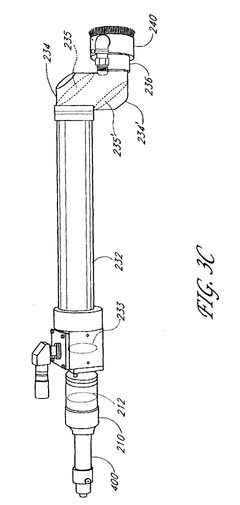
【図4】
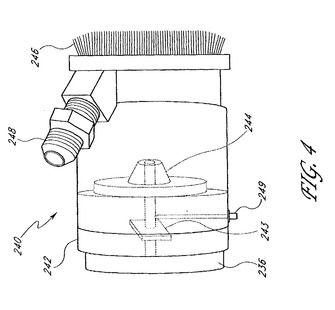
【図5】
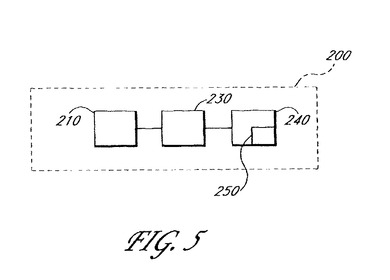
【図6A】
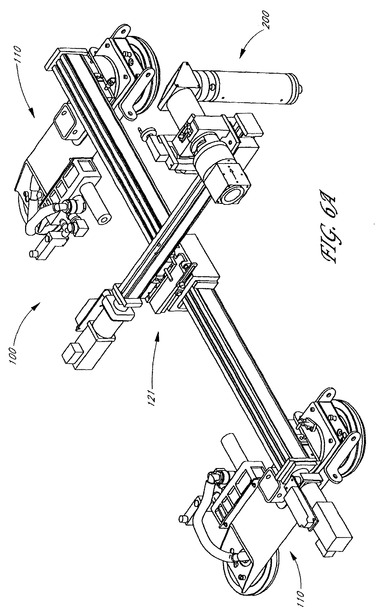
【図6B】
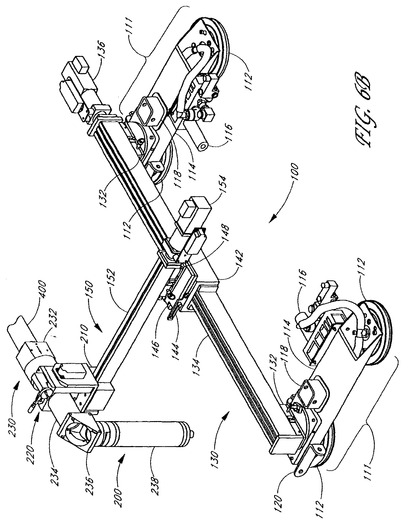
【図7】
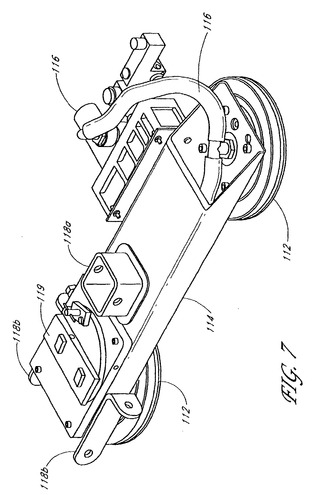
【図8】
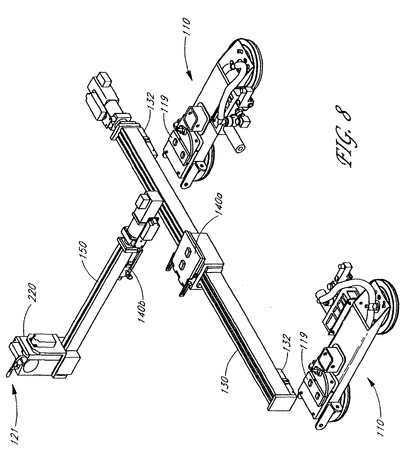
【図9】
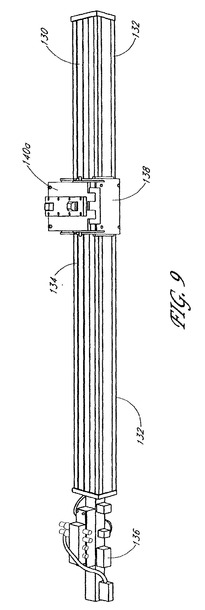
【図10】
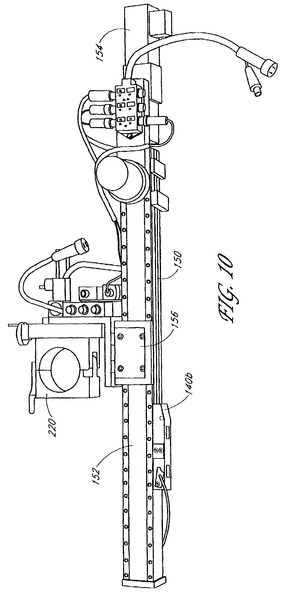
【図11A】
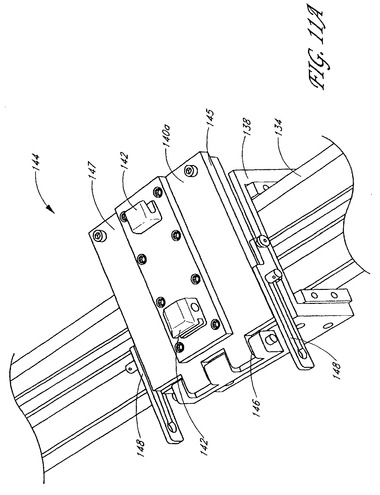
【図11B】
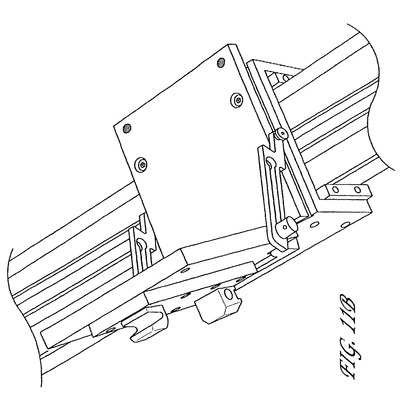
【図12】
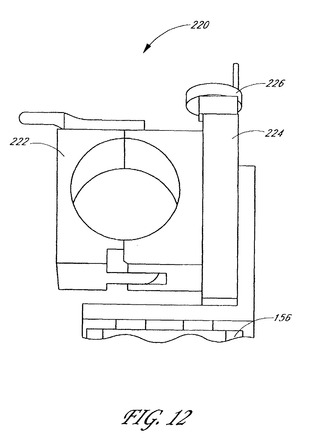
【図13】
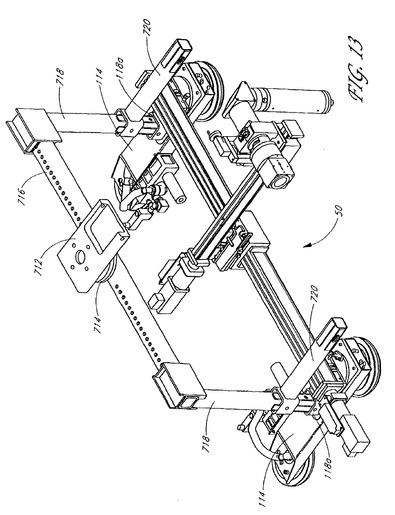
【図14A】
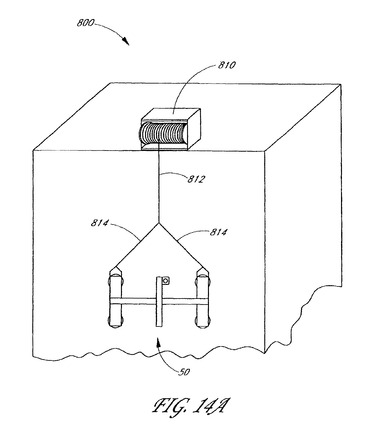
【図14B】
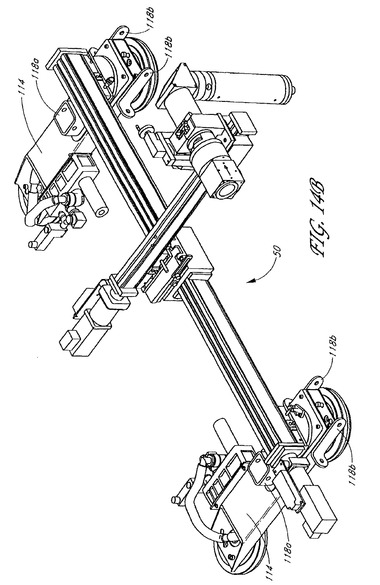
【図15】
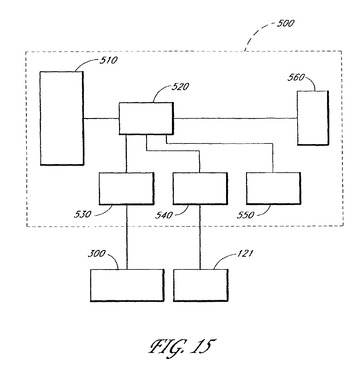
【図16】
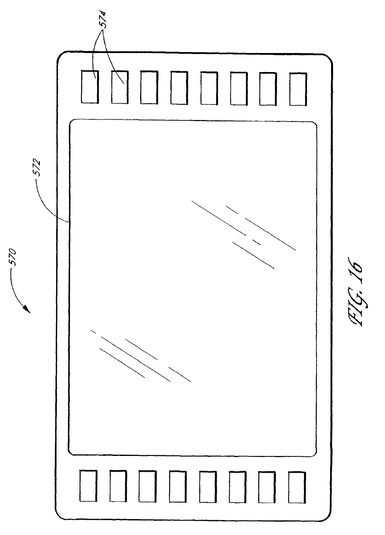
【図17A】
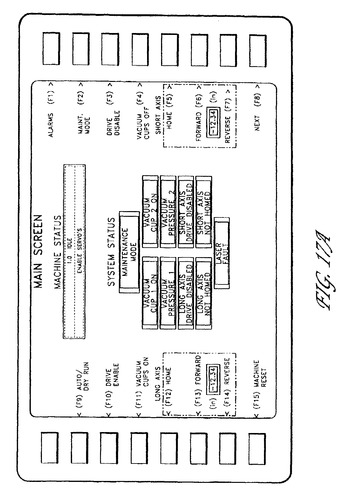
【図17B】
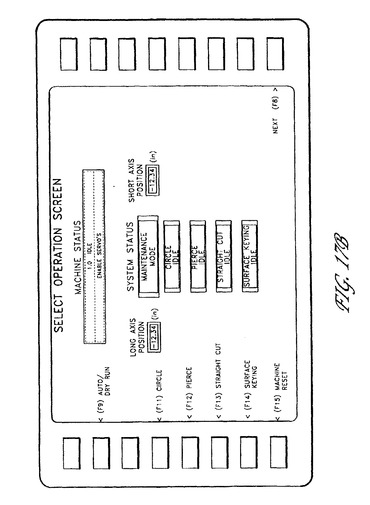
【図17C】
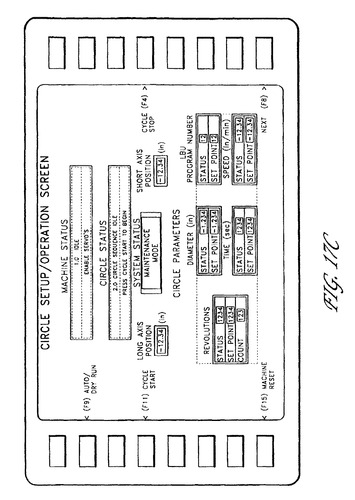
【図17D】
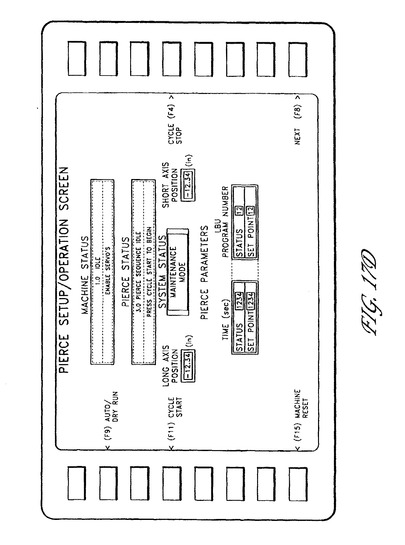
【図17E】
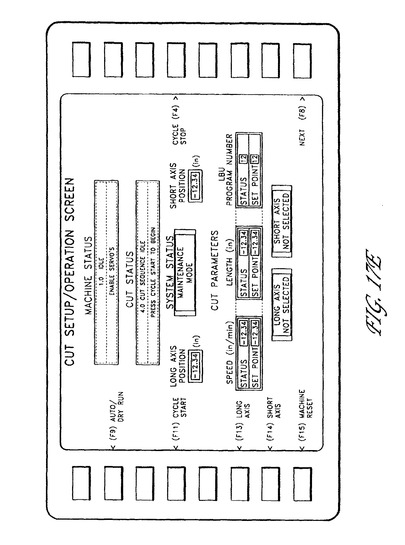
【図17F】
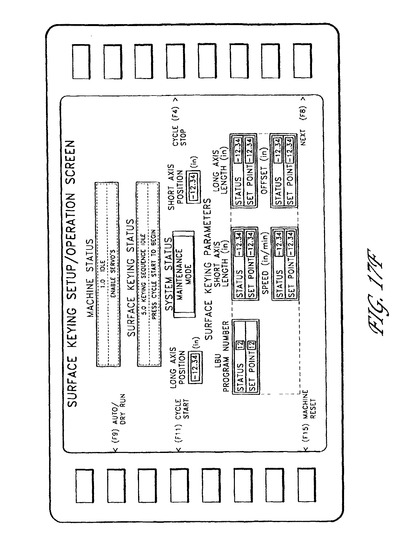
【図17G】
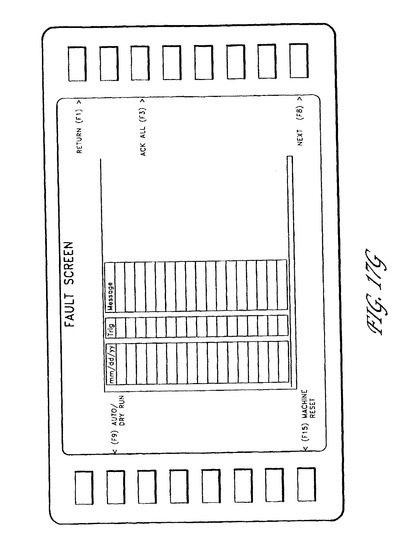
【図17H】
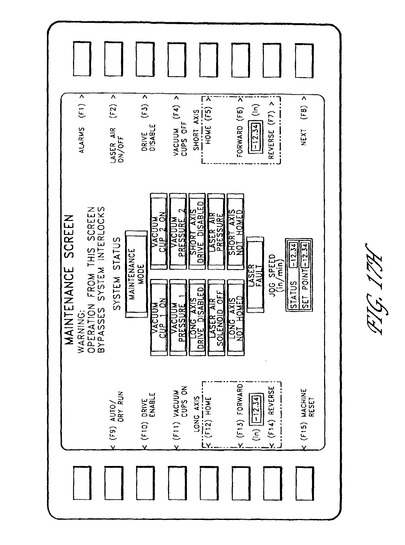
【図18A】
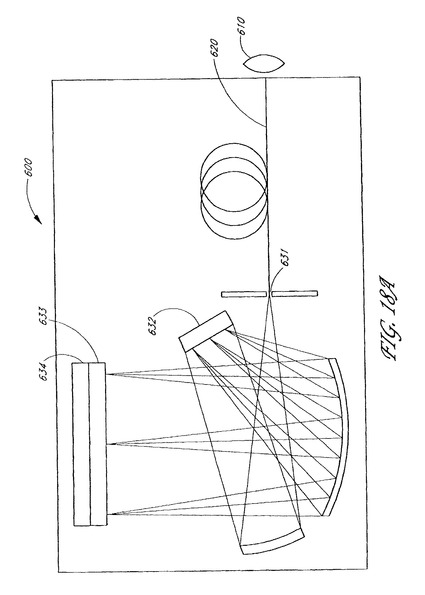
【図18B】
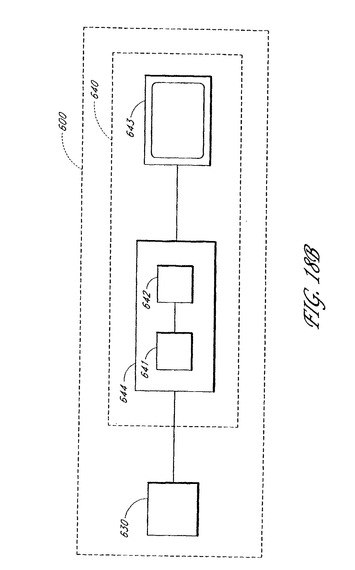
【図19】
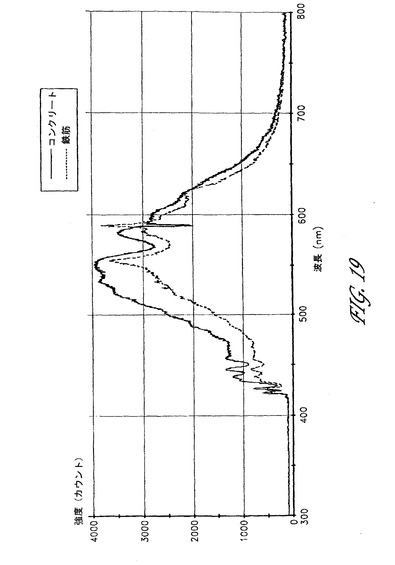
【図20】
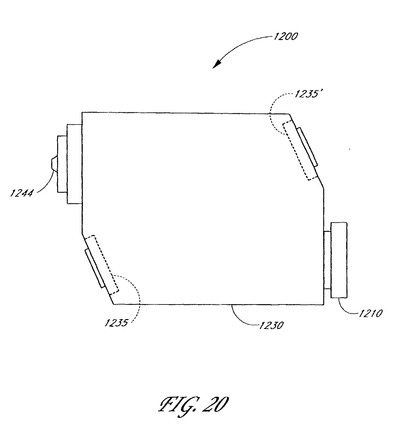
【図21A】
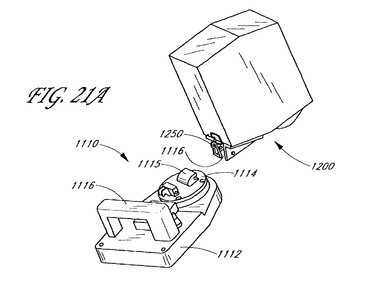
【図21B】
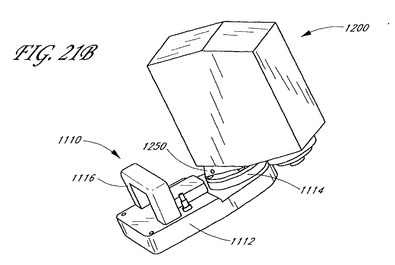
【図21C】
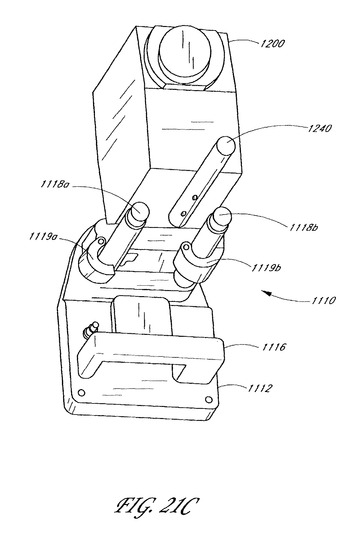
【図21D】
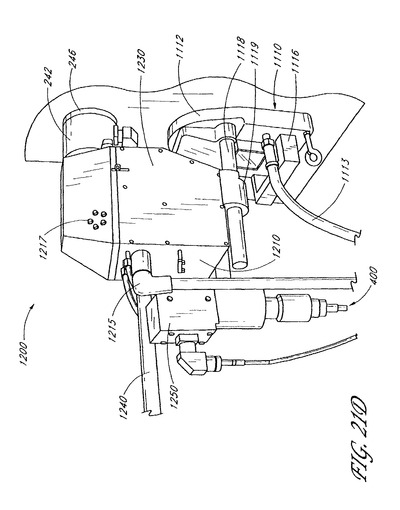
【図22A】
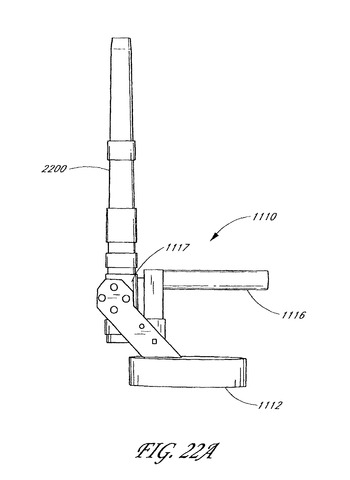
【図22B】
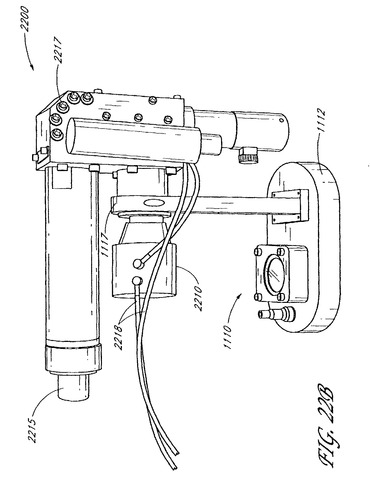
【図22C】
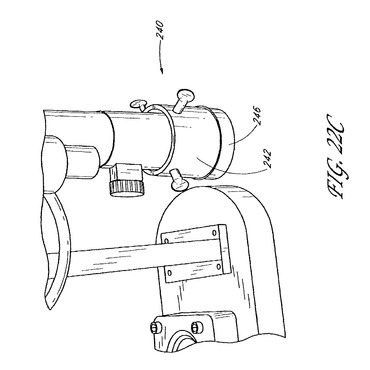
【図23】
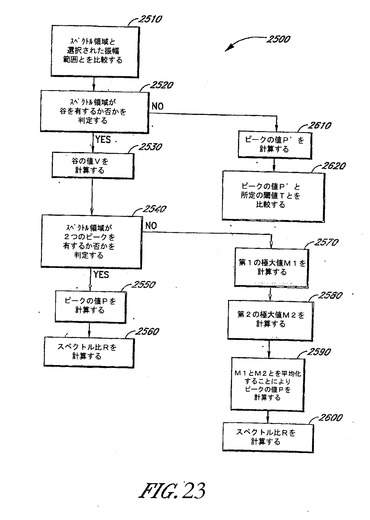
【図2】
【図3A】
【図3B】
【図3C】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図12】
【図13】
【図14A】
【図14B】
【図15】
【図16】
【図17A】
【図17B】
【図17C】
【図17D】
【図17E】
【図17F】
【図17G】
【図17H】
【図18A】
【図18B】
【図19】
【図20】
【図21A】
【図21B】
【図21C】
【図21D】
【図22A】
【図22B】
【図22C】
【図23】
【公開番号】特開2013−66938(P2013−66938A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−267238(P2012−267238)
【出願日】平成24年12月6日(2012.12.6)
【分割の表示】特願2007−527923(P2007−527923)の分割
【原出願日】平成17年8月16日(2005.8.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.PENTIUM
【出願人】(503042820)ローマ リンダ ユニヴァーシティ メディカル センター (21)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2012−267238(P2012−267238)
【出願日】平成24年12月6日(2012.12.6)
【分割の表示】特願2007−527923(P2007−527923)の分割
【原出願日】平成17年8月16日(2005.8.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.PENTIUM
【出願人】(503042820)ローマ リンダ ユニヴァーシティ メディカル センター (21)
【Fターム(参考)】
[ Back to top ]