
杭打機及び杭打機の安定度測定方法
【課題】杭打機自体に荷重を検出するセンサを組み込むことにより、簡単な構造で、かつ、容易に重心や安定度を測定する。
【解決手段】クローラ13aを備えた下部走行体13の上部に旋回ベアリング14を介して上部旋回体15を旋回可能に設けたベースマシン12における上部旋回体15の前部に、リーダブラケット連結部材を介して取り付けられるリーダブラケット18を設けるとともに、上部旋回体15の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックス22を設ける。リーダブラケット連結部材として、リーダブラケット18に加わるリーダ16及びオーガ駆動装置29を含む荷重をフロント荷重として検出するピン型ロードセル23を用いるとともに、アウトリガボックス連結部材として、アウトリガボックスに加22わるカウンタウエイト20を含む荷重をリア荷重として検出するピン型ロードセル31を用いた。
【解決手段】クローラ13aを備えた下部走行体13の上部に旋回ベアリング14を介して上部旋回体15を旋回可能に設けたベースマシン12における上部旋回体15の前部に、リーダブラケット連結部材を介して取り付けられるリーダブラケット18を設けるとともに、上部旋回体15の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックス22を設ける。リーダブラケット連結部材として、リーダブラケット18に加わるリーダ16及びオーガ駆動装置29を含む荷重をフロント荷重として検出するピン型ロードセル23を用いるとともに、アウトリガボックス連結部材として、アウトリガボックスに加22わるカウンタウエイト20を含む荷重をリア荷重として検出するピン型ロードセル31を用いた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、杭打機及び杭打機の安定度測定方法に関し、詳しくは、施工条件や施工方法に応じてリーダや作業装置、カウンタウエイトなどの各種機器を適宜選択して装着する杭打機及び各種機器を装着した作業状態の杭打機の安定度を測定する方法に関する。
【背景技術】
【0002】
下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けた杭打機では、施工条件や施工方法によって上部旋回体の前部に装着するリーダの長さやリーダに装着する作業装置を適宜選択することから、上部旋回体の前部に加わる荷重が変化する。sらに、上部旋回体の後部に装着するカウンタウエイトも、組み合わせにより重量を変えることができるようになっている。
【0003】
また、電動式の作業装置を使用する場合には、上部旋回体の後部に、発電機を載置する発電機架台を設けるようにしている。このため、上部旋回体に装着する各種機器の装着状態によって杭打機全体の重量や重心位置が変化することになり、前後左右の荷重のバランスによっては杭打機の安定度が低下して転倒するおそれがある。また、上部旋回体の後部の荷重が大きすぎると、旋回ベアリングに大きな負荷がかかり、旋回ベアリングの寿命を縮めてしまう。
【0004】
このようなことから、各種機器を装着した実際の作業状態における杭打機の安定度を求める必要があり、従来は、ベースマシンや各種機器の重量などをパソコンに入力して計算によって求めていた。また、作業状態における杭打機の安定度を直接的に測定する方法として、上部旋回体に設けられているフロントジャッキ及びリアジャッキ(アウトリガジャッキ)を所定の順序でそれぞれ作動させて杭打機を傾斜させ、各傾斜状態で各ジャッキに加わる荷重をそれぞれ検出し、検出した各荷重に基づいて杭打機の重量や重心位置を算出するとともに、杭打機の安定度を算出するものがある(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−185204号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述の特許文献1のものは、荷重や傾斜角度を検出するセンサを用意することにより、装置の装着状態が異なる各種杭打機の安定度を正確に求めることはできるが、各種センサを用意した状態でフロントジャッキ及びリアジャッキを所定の順序で作動させる必要があり、安定度の算出に手間がかかるという問題があった。
【0007】
そこで本発明は、杭打機自体に荷重を検出するセンサを組み込むことにより、簡単な構造で、かつ、容易に重心や安定度を測定することができる杭打機及び杭打機の安定度測定方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明の杭打機は、クローラを備えた下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けたベースマシンにおける前記上部旋回体の前部にリーダブラケット連結部材を介して取り付けられるリーダブラケットを設けるとともに、前記上部旋回体の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックスを設けた杭打機において、前記リーダブラケット連結部材として、前記リーダブラケットに加わるリーダ及び作業装置を含む荷重をフロント荷重として検出するピン型ロードセルを用いるとともに、前記アウトリガボックス連結部材として、前記アウトリガボックスに加わるカウンタウエイトを含む荷重をリア荷重として検出するピン型ロードセルを用いたことを特徴としている。また、前記アウトリガボックスに、発電機を載置する発電機架台が取り付けられ、前記リア荷重は、発電機及び発電機架台を含む荷重であっても良く、前記リーダブラケット連結部材及び前記アウトリガボックス連結部材は、上下左右の4箇所にそれぞれ設けられていると好ましい。さらに、前記リーダブラケットに設けられたフロントジャッキのシリンダの伸び側と、前記アウトリガボックスに設けられたリアジャッキのシリンダの伸び側とに、シリンダの伸び側の圧力上昇を検出したときに前記ピン型ロードセルによる荷重の検出を停止させる圧力センサをそれぞれ設けると好適である。
【0009】
また、本発明の杭打機の安定度測定方法は、クローラを備えた下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けたベースマシンにおける前記上部旋回体の前部にリーダブラケット連結部材を介して取り付けられるリーダブラケットを設けるとともに、前記上部旋回体の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックスを設けた杭打機の安定度を検出する方法において、前記リーダブラケット連結部材としてピン型ロードセルを用い、該ピン型ロードセルにて前記リーダブラケットに加わるリーダ及び作業装置を含む荷重をフロント荷重として検出し、前記アウトリガボックス連結部材としてピン型ロードセルを用い、該ピン型ロードセルにて前記アウトリガボックスに加わるカウンタウエイトを含む荷重をリア荷重として検出するとともに、検出した前記フロント荷重及び前記リア荷重と,あらかじめ求めた前記ベースマシンの重量及び重心位置とに基づいて、作業状態における杭打機の重量及び重心位置を算出することを特徴としている。また、前記アウトリガボックスに、発電機を載置する発電機架台が取り付けられ、前記リア荷重は、発電機及び発電機架台を含む荷重であっても良く、前記リーダブラケットに設けられたフロントジャッキのシリンダの伸び側の圧力を検出するとともに、前記アウトリガボックスに設けられたリアジャッキのシリンダの伸び側の圧力を検出し、各シリンダの伸び側の圧力が上昇したときに、前記ピン型ロードセルによる荷重の検出又は重量及び重心位置の算出を停止すると好ましい。さらに、算出した前記重量があらかじめ設定された最大重量を超えたとき、あるいは、算出した前記重心位置があらかじめ設定された基準重心範囲を外れたときに、警報を発したり、杭打機を停止させたりすると好適である。
【発明の効果】
【0010】
本発明によれば、リーダブラケット連結部材及びアウトリガボックス連結部材として用いたピン型ロードセルによって上部旋回体に加わるフロント荷重及びリア荷重を検出することができるので、上部旋回体の前後に加わる荷重の状態を容易かつ確実に知ることができる。さらに、検出したフロント荷重及びリア荷重と、あらかじめ求めたベースマシンの重量及び重心位置とに基づいて重量や重心位置を算出することにより、各種機器を装着した実際の作業状態における杭打機の安定度を求めることができる。これにより、杭打機が転倒する危険性の有無を判定することができるので、転倒の危険性がある際には、警告灯や警報音を発してオペレータに警告したり、杭打機の作動を自動的に停止させたりすることにより、作業中の杭打機が転倒することを確実に防止できる。
【0011】
また、フロントジャッキやリアジャッキ(アウトリガジャッキ)のシリンダの伸び側の圧力が上昇したとき、すなわち、シリンダのロッドが伸長して各ジャッキが作動した状態では、荷重の検出や重量及び重心位置の算出を停止することにより、不正確な荷重データで杭打機の重量や重心位置を算出してしまうことを防止できる。
【図面の簡単な説明】
【0012】
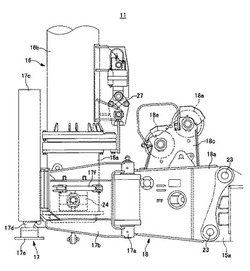
【図1】本発明の一形態例を示す杭打機のリーダブラケットの要部側面図である。
【図2】同じくリーダブラケットの要部平面図である。
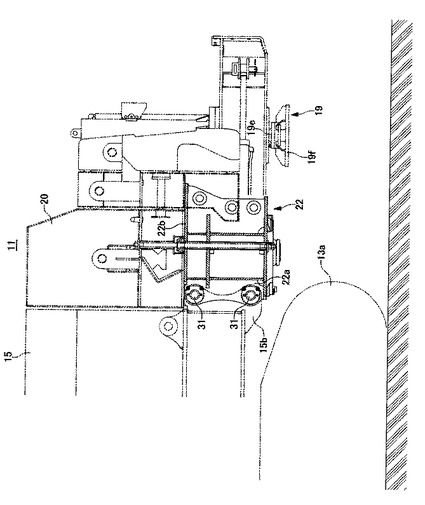
【図3】図4のIII-III断面図である。
【図4】同じくアウトリガボックスの要部平面図である。
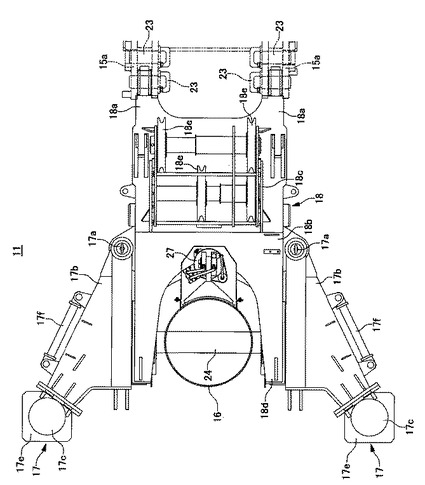
【図5】同じく杭打機の平面図である。
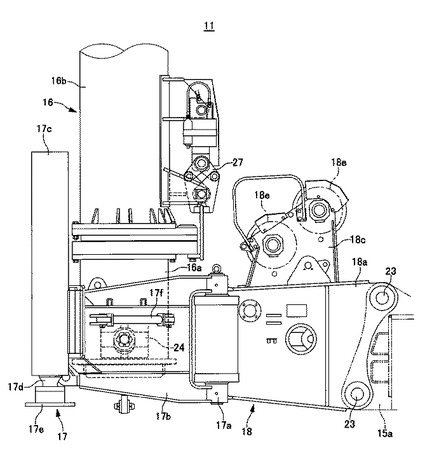
【図6】同じく杭打機の側面図である。
【発明を実施するための形態】
【0013】
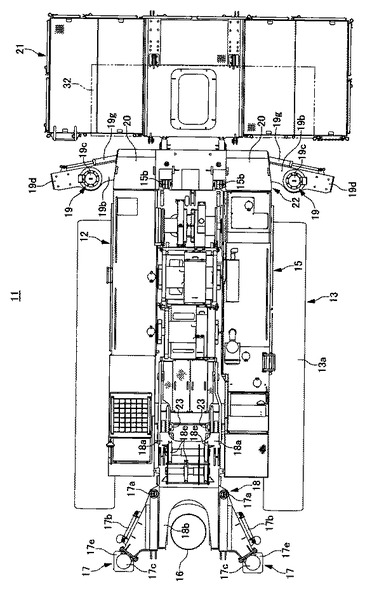
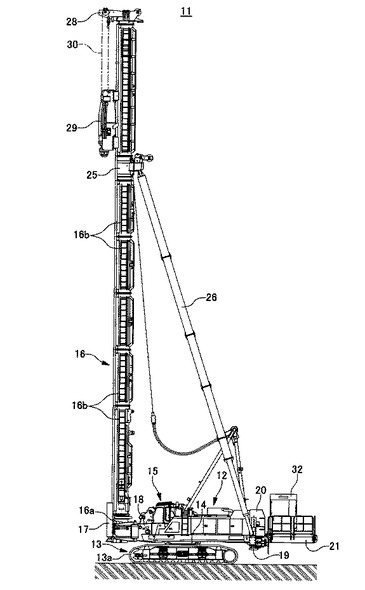
図1乃至図6は本発明の杭打機の一形態例を示す図で、この杭打機11のベースマシン12は、クローラ13aを備えた下部走行体13の上部に、旋回ベアリング14を介して上部旋回体15を旋回可能に設けるとともに、該上部旋回体15の前部には、リーダ16及びフロントジャッキ17が取り付けられるリーダブラケット18が設けられ、上部旋回体15の後部には、リアジャッキ(アウトリガジャッキ)19,19と、カウンタウエイト20と、発電機載置台21を取り付けるアウトリガボックス22とが設けられている。
【0014】
リーダブラケット18は、後端部から上部旋回体15の方向に突設した左右一対の連結腕18a,18aと、前端部に設けられたリーダ保持部18bと、上面に設けられたシーブブラケット18cと、両側面にそれぞれ設けられた前記フロントジャッキ17,17とを備えている。連結腕18a,18aの上端部及び下端部は、上部旋回体15の前方に突設した左右一対のリーダブラケット取付腕15a,15aの上下に形成された二股部にそれぞれ差し込まれ、両者の重合部に形成された上下左右4箇所の通孔に、リーダブラケット連結部材となる4本の第1ピン型ロードセル23を挿通することにより連結され、リーダブラケット18が4本の第1ピン型ロードセル23を介して上部旋回体15の前部に取り付けられた状態となる。
【0015】
リーダ保持部18bは、リーダ16の後方及び両側方を囲繞する前方が開口した平面視U字状のブラケット部18dを備えており、リーダ16の下端部を左右方向に貫通したリーダ取付軸24の両端部がブラケット部18dに取り付けられている。また、シーブブラケット18cには、上部旋回体15に設けられたウインチから巻出されたワイヤロープが掛け回される複数のガイドシーブ18eが回転可能に取り付けられている。前記フロントジャッキ17は、リーダブラケット18の中央部左右両側部に回動ピン17aを介してそれぞれ水平方向に回動可能に取り付けられる回動腕17bの先端部にジャッキシリンダ17cをそれぞれ設けたものであって、ジャッキシリンダ17cの下端から下方に突出したシリンダロッド17dの下端には接地板17eが設けられている。また、各回動腕17bの外側面には、回動腕17bを開いた状態で固定するための固定部材17fがそれぞれ設けられている。
【0016】
前記リーダ16は、前記リーダ取付軸24によってリーダブラケット18に対して前後左右に傾動可能に取り付けられるリーダ基部材16aの上部に、複数のリーダ部材16b、16bを連結したものであって、リーダ16の中間部には、リーダ16を回動可能に保持するリーダホルダ25が設けられている。このリーダホルダ25の後部には、前記リアジャッキ19,19の先端部上面に立設される左右一対のバックステー26,26の先端が連結され、該バックステー26,26によってリーダ16が後方から支持されている。
【0017】
また、リーダ基部材16aの上に連結されるリーダ部材16bには、リーダ基部材16aの外周に設けられた突片を把持してリーダ16の回動を防止する回り止め部材27が設けられ、リーダ16の頂部には、ワイヤロープが掛け回される複数のガイドシーブを回転可能に設けたトップシーブブロック28が設けられている。さらに、リーダ16の前面には、各種作業装置、例えば、オーガを駆動するオーガ駆動装置29がリーダ16に沿って昇降可能に設けられ、トップシーブブロック28から垂下したワイヤロープ30にて吊持され、上部旋回体15との間には、図示しない油圧配管あるいは電源ケーブルが接続されている。
【0018】
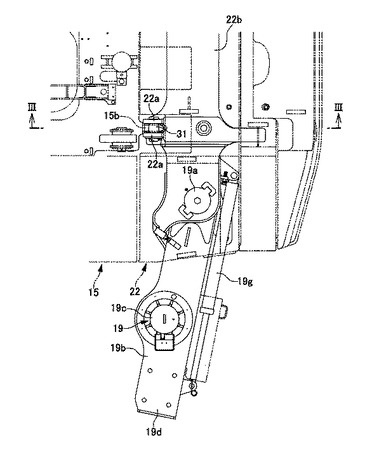
一方、前記アウトリガボックス22は、前端部両側から上部旋回体15の方向に突設した左右一対の連結腕22a,22aと、両側部にそれぞれ設けられた前記リアジャッキ19,19と、上面に設けられたカウンタウエイト載置部22bと、後部側に設けられた発電機載置台21の取付部とを備えている。連結腕22aの上端部及び下端部は、上部旋回体15の後部から突設した左右一対のアウトリガボックス連結腕15b,15bの上下に形成された二股部にそれぞれ差し込まれ、両者の重合部に形成された上下左右4箇所の通孔に、アウトリガボックス連結部材となる4本の第2ピン型ロードセル31を挿通することにより連結され、アウトリガボックス22が4本の第2ピン型ロードセル31を介して上部旋回体15の後部に取り付けられた状態となる。
【0019】
カウンタウエイト載置部22bは、前記カウンタウエイト20を載置するもので、発電機載置台21は、前記オーガ駆動装置29が電動式の場合に、電源となる発電機32を載置するために設けられ、オーガ駆動装置29が油圧式の場合には、発電機載置台21はアウトリガボックス22から取り外される。
【0020】
リアジャッキ19は、アウトリガボックス22の両側部に回動ピン19aを介してそれぞれ水平方向に回動可能に取り付けられる回動腕19bと、該回動腕19bの中間部に設けられたジャッキシリンダ19cと、回動腕19bの先端上面に設けられたバックステー連結部19dとを備えている。前記ジャッキシリンダ19cの下端から下方に突出したシリンダロッド19eの下端には接地板19fが設けられており、回動腕19bの後部側面には、輸送時にリアジャッキ19を収納位置に移動させて固定するためのシリンダ19gが設けられている。また、前記バックステー連結部19dには、前記バックステー26の下端部となるロッドの先端が連結される。
【0021】
リーダブラケット18やアウトリガボックス22を上部旋回体15に取り付けるための連結部材となる第1ピン型ロードセル23及び第2ピン型ロードセル31は、リーダブラケット取付腕15a及びアウトリガボックス連結腕15bの各二股部に両端が保持され、各二股部に差し込まれた連結腕18a,22aから加わる荷重を中間部で検出する周知のピン型ロードセルであって、4本の第1ピン型ロードセル23によってリーダブラケット18に加わるリーダ16やオーガ駆動装置29、フロントジャッキ17などからの荷重をフロント荷重として検出し、4本の第2ピン型ロードセル31によってアウトリガボックス22に加わるカウンタウエイト20や発電機載置台21、発電機32、リアジャッキ19などからの荷重をリア荷重として検出する。
【0022】
このように形成された杭打機11は、施工条件や施工方法に応じて、リーダブラケット18には、掘削深さに対応した長さ(高さ)を有するリーダ16が取り付けられるとともに、リーダ16には、一軸型や二軸型、電動式や油圧式のオーガ駆動装置(作業装置)29が選択して取り付けられ、さらに、リーダ16の長さに対応したバックステー26が取り付けられる。また、アウトリガボックス22には、カウンタウエイト20が載置され、オーガ駆動装置29が電動式の場合には発電機32を載置する発電機載置台21が取り付けられる。
【0023】
リーダブラケット18及びアウトリガボックス22に前記各種機器を取り付けた作業状態で、前記第1ピン型ロードセル23によってフロント荷重が検出され、前記第2ピン型ロードセル31によってリア荷重が検出される。この状態で、検出したフロント荷重及びリア荷重をそれぞれ表示することにより、オペレータがフロント荷重及びリア荷重を確認することができ、あらかじめ設定された最大フロント荷重や最大リア荷重との比較や、前後の荷重バランスが適切か否かを判断することができる。
【0024】
これにより、各荷重や荷重バランスが不適切であるとオペレータが判断した場合には、作業開始前に対応することができ、過大なリア荷重による旋回ベアリング14への悪影響も回避することができる。また、同様に、各4本の第1ピン型ロードセル23や第2ピン型ロードセル31のそれぞれの荷重バランスを比較することにより、フロント荷重やリア荷重における前後左右方向のバランスを算出して表示することも可能である。
【0025】
さらに、あらかじめ前記各種機器を取り付けていない状態で計算あるいは実測にて求めた前記ベースマシン12の重量及び重心位置と、検出したフロント荷重及びリア荷重とに基づいて、作業状態における杭打機11の重量や重心位置を算出することにより、重量が杭打機11に設定されている最大重量を超えているが否か、重心位置があらかじめ設定された基準重心範囲内にあるか否かを判定することで作業状態における杭打機11の安定度を求めることができ、作業状態の杭打機11の重量が最大重量を超えている場合や重心位置が基準重心範囲内から外れて安定度が低下している場合には、警告灯や警報音などの警報を発してオペレータに通知したり、下部走行体13による走行や上部旋回体15の旋回を含む杭打機11の各種動作を自動的に停止させることができる。これにより、杭打ち作業中の杭打機11を保護できるとともに、杭打機11が転倒する危険性も回避することができる。
【0026】
一方、フロントジャッキ17やリアジャッキ19が作動している場合、すなわち、ジャッキシリンダ17c,19cの伸び側に作動油を供給してシリンダロッド17d、19eを伸長させ、接地板17e、19fを接地させた状態では、各ジャッキ17,19によってリーダブラケット18やアウトリガボックス22が支持された状態になり、リーダ16やカウンタウエイト20などの荷重の一部を各ジャッキ17,19が負担し、各ピン型ロードセル23,31で検出した荷重データが変化して正確な荷重を検出できなくなるため、ジャッキシリンダ17c,19cの伸び側に作動油を供給する経路の任意の位置に圧力センサを設け、該圧力センサが圧力上昇を検出したときに、各ピン型ロードセル23,31での荷重の検出を停止したり、重量や重心位置の算出を停止したりすることにより、誤った荷重データに基づいた誤判定を回避することができる。
【0027】
このように、施工条件や施工方法によって上部旋回体の前部に装着するリーダの長さやリーダに装着する作業装置を変更しても、杭打機11の重量や重心位置から安定度を容易に求めることができるので、転倒などの事故発生を防止して杭打機11による杭打ち作業を安全かつ確実に行うことができる。
【0028】
なお、重量や重心位置の算出は、従来のパソコンによる計算と同様にして行うことができ、簡単な演算装置を用いることによって容易に算出することが可能である。また、オーガ駆動装置の代わりに油圧ハンマを用い、発電機の代わりにハンマ用油圧ユニットを発電機載置台に載置することもできる。
【符号の説明】
【0029】
11…杭打機、12…ベースマシン、13…下部走行体、13a…クローラ、14…旋回ベアリング、15…上部旋回体、15a…リーダブラケット取付腕、15b…アウトリガボックス連結腕、16…リーダ、16a…リーダ基部材、16b…リーダ部材、17…フロントジャッキ、17a…回動ピン、17b…回動腕、17c…ジャッキシリンダ、17d…シリンダロッド、17e…接地板、17f…固定部材、18…リーダブラケット、18a…連結腕、18b…リーダ保持部、18c…シーブブラケット、18d…ブラケット部、18e…ガイドシーブ、19…リアジャッキ、19a…回動ピン、19b…回動腕、19c…ジャッキシリンダ、19d…バックステー連結部、19e…シリンダロッド、19f…接地板、19g…シリンダ、20…カウンタウエイト、21…発電機載置台、22…アウトリガボックス、22a…連結腕、23…第1ピン型ロードセル、24…リーダ取付軸、25…リーダホルダ、26…バックステー、27…回り止め部材、28…トップシーブブロック、29…オーガ駆動装置、30…ワイヤロープ、31…第2ピン型ロードセル、32…発電機
【技術分野】
【0001】
本発明は、杭打機及び杭打機の安定度測定方法に関し、詳しくは、施工条件や施工方法に応じてリーダや作業装置、カウンタウエイトなどの各種機器を適宜選択して装着する杭打機及び各種機器を装着した作業状態の杭打機の安定度を測定する方法に関する。
【背景技術】
【0002】
下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けた杭打機では、施工条件や施工方法によって上部旋回体の前部に装着するリーダの長さやリーダに装着する作業装置を適宜選択することから、上部旋回体の前部に加わる荷重が変化する。sらに、上部旋回体の後部に装着するカウンタウエイトも、組み合わせにより重量を変えることができるようになっている。
【0003】
また、電動式の作業装置を使用する場合には、上部旋回体の後部に、発電機を載置する発電機架台を設けるようにしている。このため、上部旋回体に装着する各種機器の装着状態によって杭打機全体の重量や重心位置が変化することになり、前後左右の荷重のバランスによっては杭打機の安定度が低下して転倒するおそれがある。また、上部旋回体の後部の荷重が大きすぎると、旋回ベアリングに大きな負荷がかかり、旋回ベアリングの寿命を縮めてしまう。
【0004】
このようなことから、各種機器を装着した実際の作業状態における杭打機の安定度を求める必要があり、従来は、ベースマシンや各種機器の重量などをパソコンに入力して計算によって求めていた。また、作業状態における杭打機の安定度を直接的に測定する方法として、上部旋回体に設けられているフロントジャッキ及びリアジャッキ(アウトリガジャッキ)を所定の順序でそれぞれ作動させて杭打機を傾斜させ、各傾斜状態で各ジャッキに加わる荷重をそれぞれ検出し、検出した各荷重に基づいて杭打機の重量や重心位置を算出するとともに、杭打機の安定度を算出するものがある(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−185204号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述の特許文献1のものは、荷重や傾斜角度を検出するセンサを用意することにより、装置の装着状態が異なる各種杭打機の安定度を正確に求めることはできるが、各種センサを用意した状態でフロントジャッキ及びリアジャッキを所定の順序で作動させる必要があり、安定度の算出に手間がかかるという問題があった。
【0007】
そこで本発明は、杭打機自体に荷重を検出するセンサを組み込むことにより、簡単な構造で、かつ、容易に重心や安定度を測定することができる杭打機及び杭打機の安定度測定方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明の杭打機は、クローラを備えた下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けたベースマシンにおける前記上部旋回体の前部にリーダブラケット連結部材を介して取り付けられるリーダブラケットを設けるとともに、前記上部旋回体の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックスを設けた杭打機において、前記リーダブラケット連結部材として、前記リーダブラケットに加わるリーダ及び作業装置を含む荷重をフロント荷重として検出するピン型ロードセルを用いるとともに、前記アウトリガボックス連結部材として、前記アウトリガボックスに加わるカウンタウエイトを含む荷重をリア荷重として検出するピン型ロードセルを用いたことを特徴としている。また、前記アウトリガボックスに、発電機を載置する発電機架台が取り付けられ、前記リア荷重は、発電機及び発電機架台を含む荷重であっても良く、前記リーダブラケット連結部材及び前記アウトリガボックス連結部材は、上下左右の4箇所にそれぞれ設けられていると好ましい。さらに、前記リーダブラケットに設けられたフロントジャッキのシリンダの伸び側と、前記アウトリガボックスに設けられたリアジャッキのシリンダの伸び側とに、シリンダの伸び側の圧力上昇を検出したときに前記ピン型ロードセルによる荷重の検出を停止させる圧力センサをそれぞれ設けると好適である。
【0009】
また、本発明の杭打機の安定度測定方法は、クローラを備えた下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けたベースマシンにおける前記上部旋回体の前部にリーダブラケット連結部材を介して取り付けられるリーダブラケットを設けるとともに、前記上部旋回体の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックスを設けた杭打機の安定度を検出する方法において、前記リーダブラケット連結部材としてピン型ロードセルを用い、該ピン型ロードセルにて前記リーダブラケットに加わるリーダ及び作業装置を含む荷重をフロント荷重として検出し、前記アウトリガボックス連結部材としてピン型ロードセルを用い、該ピン型ロードセルにて前記アウトリガボックスに加わるカウンタウエイトを含む荷重をリア荷重として検出するとともに、検出した前記フロント荷重及び前記リア荷重と,あらかじめ求めた前記ベースマシンの重量及び重心位置とに基づいて、作業状態における杭打機の重量及び重心位置を算出することを特徴としている。また、前記アウトリガボックスに、発電機を載置する発電機架台が取り付けられ、前記リア荷重は、発電機及び発電機架台を含む荷重であっても良く、前記リーダブラケットに設けられたフロントジャッキのシリンダの伸び側の圧力を検出するとともに、前記アウトリガボックスに設けられたリアジャッキのシリンダの伸び側の圧力を検出し、各シリンダの伸び側の圧力が上昇したときに、前記ピン型ロードセルによる荷重の検出又は重量及び重心位置の算出を停止すると好ましい。さらに、算出した前記重量があらかじめ設定された最大重量を超えたとき、あるいは、算出した前記重心位置があらかじめ設定された基準重心範囲を外れたときに、警報を発したり、杭打機を停止させたりすると好適である。
【発明の効果】
【0010】
本発明によれば、リーダブラケット連結部材及びアウトリガボックス連結部材として用いたピン型ロードセルによって上部旋回体に加わるフロント荷重及びリア荷重を検出することができるので、上部旋回体の前後に加わる荷重の状態を容易かつ確実に知ることができる。さらに、検出したフロント荷重及びリア荷重と、あらかじめ求めたベースマシンの重量及び重心位置とに基づいて重量や重心位置を算出することにより、各種機器を装着した実際の作業状態における杭打機の安定度を求めることができる。これにより、杭打機が転倒する危険性の有無を判定することができるので、転倒の危険性がある際には、警告灯や警報音を発してオペレータに警告したり、杭打機の作動を自動的に停止させたりすることにより、作業中の杭打機が転倒することを確実に防止できる。
【0011】
また、フロントジャッキやリアジャッキ(アウトリガジャッキ)のシリンダの伸び側の圧力が上昇したとき、すなわち、シリンダのロッドが伸長して各ジャッキが作動した状態では、荷重の検出や重量及び重心位置の算出を停止することにより、不正確な荷重データで杭打機の重量や重心位置を算出してしまうことを防止できる。
【図面の簡単な説明】
【0012】
【図1】本発明の一形態例を示す杭打機のリーダブラケットの要部側面図である。
【図2】同じくリーダブラケットの要部平面図である。
【図3】図4のIII-III断面図である。
【図4】同じくアウトリガボックスの要部平面図である。
【図5】同じく杭打機の平面図である。
【図6】同じく杭打機の側面図である。
【発明を実施するための形態】
【0013】
図1乃至図6は本発明の杭打機の一形態例を示す図で、この杭打機11のベースマシン12は、クローラ13aを備えた下部走行体13の上部に、旋回ベアリング14を介して上部旋回体15を旋回可能に設けるとともに、該上部旋回体15の前部には、リーダ16及びフロントジャッキ17が取り付けられるリーダブラケット18が設けられ、上部旋回体15の後部には、リアジャッキ(アウトリガジャッキ)19,19と、カウンタウエイト20と、発電機載置台21を取り付けるアウトリガボックス22とが設けられている。
【0014】
リーダブラケット18は、後端部から上部旋回体15の方向に突設した左右一対の連結腕18a,18aと、前端部に設けられたリーダ保持部18bと、上面に設けられたシーブブラケット18cと、両側面にそれぞれ設けられた前記フロントジャッキ17,17とを備えている。連結腕18a,18aの上端部及び下端部は、上部旋回体15の前方に突設した左右一対のリーダブラケット取付腕15a,15aの上下に形成された二股部にそれぞれ差し込まれ、両者の重合部に形成された上下左右4箇所の通孔に、リーダブラケット連結部材となる4本の第1ピン型ロードセル23を挿通することにより連結され、リーダブラケット18が4本の第1ピン型ロードセル23を介して上部旋回体15の前部に取り付けられた状態となる。
【0015】
リーダ保持部18bは、リーダ16の後方及び両側方を囲繞する前方が開口した平面視U字状のブラケット部18dを備えており、リーダ16の下端部を左右方向に貫通したリーダ取付軸24の両端部がブラケット部18dに取り付けられている。また、シーブブラケット18cには、上部旋回体15に設けられたウインチから巻出されたワイヤロープが掛け回される複数のガイドシーブ18eが回転可能に取り付けられている。前記フロントジャッキ17は、リーダブラケット18の中央部左右両側部に回動ピン17aを介してそれぞれ水平方向に回動可能に取り付けられる回動腕17bの先端部にジャッキシリンダ17cをそれぞれ設けたものであって、ジャッキシリンダ17cの下端から下方に突出したシリンダロッド17dの下端には接地板17eが設けられている。また、各回動腕17bの外側面には、回動腕17bを開いた状態で固定するための固定部材17fがそれぞれ設けられている。
【0016】
前記リーダ16は、前記リーダ取付軸24によってリーダブラケット18に対して前後左右に傾動可能に取り付けられるリーダ基部材16aの上部に、複数のリーダ部材16b、16bを連結したものであって、リーダ16の中間部には、リーダ16を回動可能に保持するリーダホルダ25が設けられている。このリーダホルダ25の後部には、前記リアジャッキ19,19の先端部上面に立設される左右一対のバックステー26,26の先端が連結され、該バックステー26,26によってリーダ16が後方から支持されている。
【0017】
また、リーダ基部材16aの上に連結されるリーダ部材16bには、リーダ基部材16aの外周に設けられた突片を把持してリーダ16の回動を防止する回り止め部材27が設けられ、リーダ16の頂部には、ワイヤロープが掛け回される複数のガイドシーブを回転可能に設けたトップシーブブロック28が設けられている。さらに、リーダ16の前面には、各種作業装置、例えば、オーガを駆動するオーガ駆動装置29がリーダ16に沿って昇降可能に設けられ、トップシーブブロック28から垂下したワイヤロープ30にて吊持され、上部旋回体15との間には、図示しない油圧配管あるいは電源ケーブルが接続されている。
【0018】
一方、前記アウトリガボックス22は、前端部両側から上部旋回体15の方向に突設した左右一対の連結腕22a,22aと、両側部にそれぞれ設けられた前記リアジャッキ19,19と、上面に設けられたカウンタウエイト載置部22bと、後部側に設けられた発電機載置台21の取付部とを備えている。連結腕22aの上端部及び下端部は、上部旋回体15の後部から突設した左右一対のアウトリガボックス連結腕15b,15bの上下に形成された二股部にそれぞれ差し込まれ、両者の重合部に形成された上下左右4箇所の通孔に、アウトリガボックス連結部材となる4本の第2ピン型ロードセル31を挿通することにより連結され、アウトリガボックス22が4本の第2ピン型ロードセル31を介して上部旋回体15の後部に取り付けられた状態となる。
【0019】
カウンタウエイト載置部22bは、前記カウンタウエイト20を載置するもので、発電機載置台21は、前記オーガ駆動装置29が電動式の場合に、電源となる発電機32を載置するために設けられ、オーガ駆動装置29が油圧式の場合には、発電機載置台21はアウトリガボックス22から取り外される。
【0020】
リアジャッキ19は、アウトリガボックス22の両側部に回動ピン19aを介してそれぞれ水平方向に回動可能に取り付けられる回動腕19bと、該回動腕19bの中間部に設けられたジャッキシリンダ19cと、回動腕19bの先端上面に設けられたバックステー連結部19dとを備えている。前記ジャッキシリンダ19cの下端から下方に突出したシリンダロッド19eの下端には接地板19fが設けられており、回動腕19bの後部側面には、輸送時にリアジャッキ19を収納位置に移動させて固定するためのシリンダ19gが設けられている。また、前記バックステー連結部19dには、前記バックステー26の下端部となるロッドの先端が連結される。
【0021】
リーダブラケット18やアウトリガボックス22を上部旋回体15に取り付けるための連結部材となる第1ピン型ロードセル23及び第2ピン型ロードセル31は、リーダブラケット取付腕15a及びアウトリガボックス連結腕15bの各二股部に両端が保持され、各二股部に差し込まれた連結腕18a,22aから加わる荷重を中間部で検出する周知のピン型ロードセルであって、4本の第1ピン型ロードセル23によってリーダブラケット18に加わるリーダ16やオーガ駆動装置29、フロントジャッキ17などからの荷重をフロント荷重として検出し、4本の第2ピン型ロードセル31によってアウトリガボックス22に加わるカウンタウエイト20や発電機載置台21、発電機32、リアジャッキ19などからの荷重をリア荷重として検出する。
【0022】
このように形成された杭打機11は、施工条件や施工方法に応じて、リーダブラケット18には、掘削深さに対応した長さ(高さ)を有するリーダ16が取り付けられるとともに、リーダ16には、一軸型や二軸型、電動式や油圧式のオーガ駆動装置(作業装置)29が選択して取り付けられ、さらに、リーダ16の長さに対応したバックステー26が取り付けられる。また、アウトリガボックス22には、カウンタウエイト20が載置され、オーガ駆動装置29が電動式の場合には発電機32を載置する発電機載置台21が取り付けられる。
【0023】
リーダブラケット18及びアウトリガボックス22に前記各種機器を取り付けた作業状態で、前記第1ピン型ロードセル23によってフロント荷重が検出され、前記第2ピン型ロードセル31によってリア荷重が検出される。この状態で、検出したフロント荷重及びリア荷重をそれぞれ表示することにより、オペレータがフロント荷重及びリア荷重を確認することができ、あらかじめ設定された最大フロント荷重や最大リア荷重との比較や、前後の荷重バランスが適切か否かを判断することができる。
【0024】
これにより、各荷重や荷重バランスが不適切であるとオペレータが判断した場合には、作業開始前に対応することができ、過大なリア荷重による旋回ベアリング14への悪影響も回避することができる。また、同様に、各4本の第1ピン型ロードセル23や第2ピン型ロードセル31のそれぞれの荷重バランスを比較することにより、フロント荷重やリア荷重における前後左右方向のバランスを算出して表示することも可能である。
【0025】
さらに、あらかじめ前記各種機器を取り付けていない状態で計算あるいは実測にて求めた前記ベースマシン12の重量及び重心位置と、検出したフロント荷重及びリア荷重とに基づいて、作業状態における杭打機11の重量や重心位置を算出することにより、重量が杭打機11に設定されている最大重量を超えているが否か、重心位置があらかじめ設定された基準重心範囲内にあるか否かを判定することで作業状態における杭打機11の安定度を求めることができ、作業状態の杭打機11の重量が最大重量を超えている場合や重心位置が基準重心範囲内から外れて安定度が低下している場合には、警告灯や警報音などの警報を発してオペレータに通知したり、下部走行体13による走行や上部旋回体15の旋回を含む杭打機11の各種動作を自動的に停止させることができる。これにより、杭打ち作業中の杭打機11を保護できるとともに、杭打機11が転倒する危険性も回避することができる。
【0026】
一方、フロントジャッキ17やリアジャッキ19が作動している場合、すなわち、ジャッキシリンダ17c,19cの伸び側に作動油を供給してシリンダロッド17d、19eを伸長させ、接地板17e、19fを接地させた状態では、各ジャッキ17,19によってリーダブラケット18やアウトリガボックス22が支持された状態になり、リーダ16やカウンタウエイト20などの荷重の一部を各ジャッキ17,19が負担し、各ピン型ロードセル23,31で検出した荷重データが変化して正確な荷重を検出できなくなるため、ジャッキシリンダ17c,19cの伸び側に作動油を供給する経路の任意の位置に圧力センサを設け、該圧力センサが圧力上昇を検出したときに、各ピン型ロードセル23,31での荷重の検出を停止したり、重量や重心位置の算出を停止したりすることにより、誤った荷重データに基づいた誤判定を回避することができる。
【0027】
このように、施工条件や施工方法によって上部旋回体の前部に装着するリーダの長さやリーダに装着する作業装置を変更しても、杭打機11の重量や重心位置から安定度を容易に求めることができるので、転倒などの事故発生を防止して杭打機11による杭打ち作業を安全かつ確実に行うことができる。
【0028】
なお、重量や重心位置の算出は、従来のパソコンによる計算と同様にして行うことができ、簡単な演算装置を用いることによって容易に算出することが可能である。また、オーガ駆動装置の代わりに油圧ハンマを用い、発電機の代わりにハンマ用油圧ユニットを発電機載置台に載置することもできる。
【符号の説明】
【0029】
11…杭打機、12…ベースマシン、13…下部走行体、13a…クローラ、14…旋回ベアリング、15…上部旋回体、15a…リーダブラケット取付腕、15b…アウトリガボックス連結腕、16…リーダ、16a…リーダ基部材、16b…リーダ部材、17…フロントジャッキ、17a…回動ピン、17b…回動腕、17c…ジャッキシリンダ、17d…シリンダロッド、17e…接地板、17f…固定部材、18…リーダブラケット、18a…連結腕、18b…リーダ保持部、18c…シーブブラケット、18d…ブラケット部、18e…ガイドシーブ、19…リアジャッキ、19a…回動ピン、19b…回動腕、19c…ジャッキシリンダ、19d…バックステー連結部、19e…シリンダロッド、19f…接地板、19g…シリンダ、20…カウンタウエイト、21…発電機載置台、22…アウトリガボックス、22a…連結腕、23…第1ピン型ロードセル、24…リーダ取付軸、25…リーダホルダ、26…バックステー、27…回り止め部材、28…トップシーブブロック、29…オーガ駆動装置、30…ワイヤロープ、31…第2ピン型ロードセル、32…発電機
【特許請求の範囲】
【請求項1】
クローラを備えた下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けたベースマシンにおける前記上部旋回体の前部にリーダブラケット連結部材を介して取り付けられるリーダブラケットを設けるとともに、前記上部旋回体の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックスを設けた杭打機において、前記リーダブラケット連結部材として、前記リーダブラケットに加わるリーダ及び作業装置を含む荷重をフロント荷重として検出するピン型ロードセルを用いるとともに、前記アウトリガボックス連結部材として、前記アウトリガボックスに加わるカウンタウエイトを含む荷重をリア荷重として検出するピン型ロードセルを用いたことを特徴とする杭打機。
【請求項2】
前記アウトリガボックスに、発電機を載置する発電機架台が取り付けられ、前記リア荷重は、発電機及び発電機架台を含む荷重であることを特徴とする請求項1記載の杭打機。
【請求項3】
前記リーダブラケット連結部材及び前記アウトリガボックス連結部材は、上下左右の4箇所にそれぞれ設けられていることを特徴とする請求項1又は2記載の杭打機。
【請求項4】
前記リーダブラケットに設けられたフロントジャッキのシリンダの伸び側と、前記アウトリガボックスに設けられたリアジャッキのシリンダの伸び側とに、シリンダの伸び側の圧力上昇を検出したときに前記ピン型ロードセルによる荷重の検出を停止させる圧力センサをそれぞれ設けたことを特徴とする請求項1乃至3のいずれか1項記載の杭打機。
【請求項5】
クローラを備えた下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けたベースマシンにおける前記上部旋回体の前部にリーダブラケット連結部材を介して取り付けられるリーダブラケットを設けるとともに、前記上部旋回体の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックスを設けた杭打機の安定度を検出する方法において、前記リーダブラケット連結部材としてピン型ロードセルを用い、該ピン型ロードセルにて前記リーダブラケットに加わるリーダ及び作業装置を含む荷重をフロント荷重として検出し、前記アウトリガボックス連結部材としてピン型ロードセルを用い、該ピン型ロードセルにて前記アウトリガボックスに加わるカウンタウエイトを含む荷重をリア荷重として検出するとともに、検出した前記フロント荷重及び前記リア荷重と,あらかじめ求めた前記ベースマシンの重量及び重心位置とに基づいて、作業状態における杭打機の重量及び重心位置を算出することを特徴とする杭打機の安定度測定方法。
【請求項6】
前記アウトリガボックスに、発電機を載置する発電機架台が取り付けられ、前記リア荷重は、発電機及び発電機架台を含む荷重であることを特徴とする請求項5記載の杭打機の安定度測定方法。
【請求項7】
前記リーダブラケットに設けられたフロントジャッキのシリンダの伸び側の圧力を検出するとともに、前記アウトリガボックスに設けられたリアジャッキのシリンダの伸び側の圧力を検出し、各シリンダの伸び側の圧力が上昇したときに、前記ピン型ロードセルによる荷重の検出又は重量及び重心位置の算出を停止することを特徴とする請求項5又は6記載の杭打機の安定度測定方法。
【請求項8】
算出した前記重量があらかじめ設定された最大重量を超えたとき、あるいは、算出した前記重心位置があらかじめ設定された基準重心範囲を外れたときに、警報を発することを特徴とする請求項5乃至7のいずれか1項記載の杭打機の安定度測定方法。
【請求項9】
算出した前記重量があらかじめ設定された最大重量を超えたとき、あるいは、算出した前記重心位置があらかじめ設定された基準重心範囲を外れたときに、杭打機を停止させることを特徴とする請求項5乃至8のいずれか1項記載の杭打機の安定度測定方法。
【請求項1】
クローラを備えた下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けたベースマシンにおける前記上部旋回体の前部にリーダブラケット連結部材を介して取り付けられるリーダブラケットを設けるとともに、前記上部旋回体の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックスを設けた杭打機において、前記リーダブラケット連結部材として、前記リーダブラケットに加わるリーダ及び作業装置を含む荷重をフロント荷重として検出するピン型ロードセルを用いるとともに、前記アウトリガボックス連結部材として、前記アウトリガボックスに加わるカウンタウエイトを含む荷重をリア荷重として検出するピン型ロードセルを用いたことを特徴とする杭打機。
【請求項2】
前記アウトリガボックスに、発電機を載置する発電機架台が取り付けられ、前記リア荷重は、発電機及び発電機架台を含む荷重であることを特徴とする請求項1記載の杭打機。
【請求項3】
前記リーダブラケット連結部材及び前記アウトリガボックス連結部材は、上下左右の4箇所にそれぞれ設けられていることを特徴とする請求項1又は2記載の杭打機。
【請求項4】
前記リーダブラケットに設けられたフロントジャッキのシリンダの伸び側と、前記アウトリガボックスに設けられたリアジャッキのシリンダの伸び側とに、シリンダの伸び側の圧力上昇を検出したときに前記ピン型ロードセルによる荷重の検出を停止させる圧力センサをそれぞれ設けたことを特徴とする請求項1乃至3のいずれか1項記載の杭打機。
【請求項5】
クローラを備えた下部走行体の上部に旋回ベアリングを介して上部旋回体を旋回可能に設けたベースマシンにおける前記上部旋回体の前部にリーダブラケット連結部材を介して取り付けられるリーダブラケットを設けるとともに、前記上部旋回体の後部にアウトリガボックス連結部材を介して取り付けられるアウトリガボックスを設けた杭打機の安定度を検出する方法において、前記リーダブラケット連結部材としてピン型ロードセルを用い、該ピン型ロードセルにて前記リーダブラケットに加わるリーダ及び作業装置を含む荷重をフロント荷重として検出し、前記アウトリガボックス連結部材としてピン型ロードセルを用い、該ピン型ロードセルにて前記アウトリガボックスに加わるカウンタウエイトを含む荷重をリア荷重として検出するとともに、検出した前記フロント荷重及び前記リア荷重と,あらかじめ求めた前記ベースマシンの重量及び重心位置とに基づいて、作業状態における杭打機の重量及び重心位置を算出することを特徴とする杭打機の安定度測定方法。
【請求項6】
前記アウトリガボックスに、発電機を載置する発電機架台が取り付けられ、前記リア荷重は、発電機及び発電機架台を含む荷重であることを特徴とする請求項5記載の杭打機の安定度測定方法。
【請求項7】
前記リーダブラケットに設けられたフロントジャッキのシリンダの伸び側の圧力を検出するとともに、前記アウトリガボックスに設けられたリアジャッキのシリンダの伸び側の圧力を検出し、各シリンダの伸び側の圧力が上昇したときに、前記ピン型ロードセルによる荷重の検出又は重量及び重心位置の算出を停止することを特徴とする請求項5又は6記載の杭打機の安定度測定方法。
【請求項8】
算出した前記重量があらかじめ設定された最大重量を超えたとき、あるいは、算出した前記重心位置があらかじめ設定された基準重心範囲を外れたときに、警報を発することを特徴とする請求項5乃至7のいずれか1項記載の杭打機の安定度測定方法。
【請求項9】
算出した前記重量があらかじめ設定された最大重量を超えたとき、あるいは、算出した前記重心位置があらかじめ設定された基準重心範囲を外れたときに、杭打機を停止させることを特徴とする請求項5乃至8のいずれか1項記載の杭打機の安定度測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−91945(P2013−91945A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−233728(P2011−233728)
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000004617)日本車輌製造株式会社 (722)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000004617)日本車輌製造株式会社 (722)
【Fターム(参考)】
[ Back to top ]