
杭打機
【課題】回転駆動装置の形式、リーダの形式や長さ、施工部材の変更などにも容易に対応することができる制御手段を備えた杭打機を提供する。
【解決手段】リーダ16に沿って昇降する回転駆動装置18によって施工部材を回転させながら地中に圧入する杭打機11において、リーダにおける回転駆動装置の昇降位置を検出する位置検出手段と、回転駆動装置の形式、リーダの形式及び長さ、施工部材の形式をあらかじめ設定する作業条件設定手段と、位置検出手段で検出した回転駆動装置の昇降位置、作業条件設定手段に設定された作業条件及び回転駆動装置に設けられた駆動源の形式に基づいて回転駆動装置から施工部材に与えるトルクの制限値を演算する制御手段とを備えている。
【解決手段】リーダ16に沿って昇降する回転駆動装置18によって施工部材を回転させながら地中に圧入する杭打機11において、リーダにおける回転駆動装置の昇降位置を検出する位置検出手段と、回転駆動装置の形式、リーダの形式及び長さ、施工部材の形式をあらかじめ設定する作業条件設定手段と、位置検出手段で検出した回転駆動装置の昇降位置、作業条件設定手段に設定された作業条件及び回転駆動装置に設けられた駆動源の形式に基づいて回転駆動装置から施工部材に与えるトルクの制限値を演算する制御手段とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、杭打機に関し、詳しくは、リーダに沿って昇降する回転駆動装置で鋼管杭やスクリューロッドなどの施工部材を回転させながら地中に圧入する杭打機に関する。
【背景技術】
【0002】
リーダに沿って昇降する回転駆動装置で鋼管杭などの施工部材を地中に回転圧入する杭打機において、リーダに対する回転駆動装置の高さに応じて回転駆動装置の油圧モータに供給する油圧を変化させることにより、リーダへの負担を抑えながら効率よく回転圧入を行えるようにした制御装置が知られている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−232038号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載された制御装置は、回転駆動装置の駆動源として油圧モータを使用している杭打機を対象としたものであり、駆動源として電気モータを使用した回転駆動装置を備えた杭打機には、そのまま適用することができなかった。
【0005】
そこで本発明は、回転駆動装置に設置した駆動源が油圧モータでも電気モータでも対応することができ、回転駆動装置の形式、リーダの形式及び長さ(高さ)、施工部材の変更などにも容易に対応することができる回転駆動装置用制御手段を備えた杭打機を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の杭打機は、リーダに沿って昇降する回転駆動装置によって施工部材を回転させながら地中に圧入する杭打機において、前記リーダにおける前記回転駆動装置の昇降位置を検出する位置検出手段と、前記回転駆動装置の形式、前記リーダの形式及び長さ、前記施工部材の形式をあらかじめ設定する作業条件設定手段と、前記位置検出手段で検出した回転駆動装置の昇降位置及び前記作業条件設定手段に設定された作業条件、前記回転駆動装置に設けられた駆動源の形式に基づいて前記回転駆動装置から前記施工部材に与えるトルクの制限値を演算して表示する制御手段とを備えていることを特徴としている。
【発明の効果】
【0007】
本発明の杭打機によれば、回転駆動装置の昇降位置に基づいて最適なトルク制御を行うことができるので、リーダや、ベースマシンのリーダ取付部、起伏シリンダ、回転駆動装置を昇降可能にガイドするガイド部(ガイドレール、ガイドギブ)などが破損したりすることを防止しながら大きなトルクで施工部材を回転させることができ、作業効率を向上させることができる。さらに、電動式あるいは油圧式といった回転駆動装置の形式、作業条件に応じたリーダの形式や長さ、鋼管杭の圧入あるいは地盤改良といった施工部材の形式などを作業開始前に設定することにより、各種作業条件に応じた最適な状態で作業を行うことができる。
【図面の簡単な説明】
【0008】
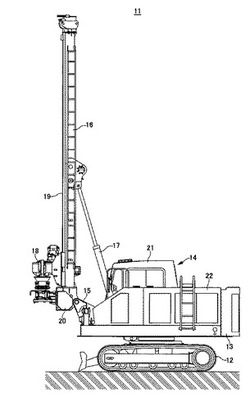
【図1】本発明の杭打機の一形態例を示す側面図である。
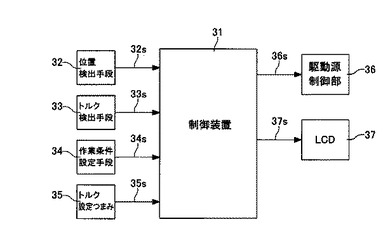
【図2】制御手段の一形態例を示すブロック図である。
【図3】回転駆動装置の昇降位置とトルク制限値との関係の一例を示す図である。
【発明を実施するための形態】
【0009】
本形態例に示す杭打機11は、クローラを備えた下部走行体12と、該下部走行体12上に旋回可能に設けられた上部旋回体13とで構成されたベースマシン14と、上部旋回体13の前部に設けられたフロントブラケット15に起伏可能に設けられたリーダ16と、該リーダ16を後方から支持する起伏シリンダ17と、前記リーダ16に昇降可能に設けられた回転駆動装置18と、該回転駆動装置18を昇降用チェーン19を介して昇降させる昇降用モータ20と、上部旋回体13に設けられた運転室21及びエンジンや油圧ユニット、発電機などを収納した機器室22とを備えている。
【0010】
さらに、前記リーダ16の下部に配置されている昇降用モータ20には、該昇降用モータ20によって駆動されるスプロケットの回転状態をロータリーエンコーダで検出することによって回転駆動装置18の昇降位置を、リーダ16の最下方に回転駆動装置18が位置した状態を基準として検出するための位置検出手段が設けられている。また、前記回転駆動装置18に装着した鋼管杭やロッドなどの施工部材を回転させるためのトルクを、回転駆動装置18の駆動源が電気モータの場合には電流により、あるいは、油圧モータの場合には油圧により検出するためのトルク検出手段が設けられている。これらの検出手段で検出した回転駆動装置18の昇降位置及びトルクは、運転室21に設けられた制御装置(制御手段)31にそれぞれ伝達される。
【0011】
前記制御装置31は、図2に示すように、位置検出手段32で検出した回転駆動装置18の昇降位置信号32s、トルク検出手段33で検出したトルク信号33s、運転室21の操作盤に設けられた作業条件設定手段34に設定された各種設定信号34s及びオペレータが操作するトルク設定つまみ35に設定されたトルク設定信号35sが入力信号として入力される。また、出力信号としては、前記各信号32s〜35sに基づいて算出したトルク制限信号36sが回転駆動装置18の駆動源制御部36に出力されるとともに、各入力信号に基づく各種表示信号37sが操作盤に設けられているLCD37などに出力される。
【0012】
通常の作業では、回転駆動装置18の昇降位置のみが変数となり、位置検出手段で検出した回転駆動装置18の昇降位置と、作業条件設定手段であらかじめ設定した回転駆動装置18の形式、リーダ16の形式及び長さ、施工部材の形式などの各種作業条件とに基づいて回転駆動装置18のトルク制限値を演算して設定する。すなわち、図3の直線Lに示すように、トルク制限値は、回転駆動装置18がリーダ16の下端部に位置しているとき(昇降位置0%)に最大(トルク制限値100%)となり、回転駆動装置18がリーダ16の上端部(昇降位置100%)に位置しているときに最小(例えばトルク制限値20〜30%)となるように設定される。
【0013】
このとき、前記トルク設定つまみを最大にしたときには、回転駆動装置18の昇降位置に応じたトルク制限値あるいはトルク制限値をあらかじめ設定した割合で下回る値がトルク設定値として回転駆動装置18の駆動源に出力される。一方、トルク設定つまみが中間位置の場合は、図3に破線Laで示すように、トルク設定つまみで設定したトルクがトルク制限値以下の範囲では、トルク設定つまみで設定したトルク設定値がそのまま回転駆動装置18の駆動源に出力されることによって施工部材が一定のトルクで回転し、回転駆動装置18がリーダ16の上方に位置し、トルク設定つまみで設定したトルクがトルク制限値を超える範囲では、トルク制限値がトルク設定値として回転駆動装置18の駆動源に出力されるとともに、これらの情報がLCDなどに表示される。また、作業中に地盤の状態により一時的にトルクが上昇した場合も、トルク制限値を超えることがないように制御される。これにより、リーダ16などの破損を防止しながら大きなトルクで施工部材を回転させて施工することができるので、鋼管杭の圧入作業や地盤改良作業などを効率よく行うことができる。
【0014】
なお、回転駆動装置18のトルク設定は、周知の手法で行うことが可能であり、駆動源に電気モータを使用した電気式回転駆動装置の場合には電気モータに供給する電力の電圧又は電流を制御すればよく、駆動源に油圧モータを使用した油圧式回転駆動装置の場合には油圧モータに供給する作動油の圧力を制御すればよい。さらに、前記トルク制限値は、図3に示すように連続的(直線的)に設定することができるが、リーダ16の適当な長さごと、例えば1mごとなどの範囲で階段状に設定することもできる。
【0015】
また、リーダ16の長さを変更した場合には、前記作業条件設定手段にリーダ16の長さを入力又は選択し、回転駆動装置18をリーダ16の最下端に下降させた位置を基準位置として回転駆動装置18の昇降位置を検出することにより、回転駆動装置18の昇降位置に応じたトルク制限値を前記同様に設定することができる。さらに、鋼管杭を圧入する際には鋼管杭の径や螺旋羽根の状態等を前記作業条件設定手段に入力したりすることにより、鋼管杭の種類に応じたトルク制限値を得ることができ、地盤改良においても、中空ロッドや掘削刃の種類を作業条件設定手段に入力したりすることにより、中空ロッドや掘削刃の種類に応じたトルク制限値を得ることができる。また、回転駆動装置18が電動式か油圧式かも選択可能としておくことにより、現場の状況によって回転駆動装置を交換した場合にも、前記同様にしてトルク制限値を得ることができ、リーダの破損などを防止しながら駆動源に応じた作業を効率よく行うことができる。
【0016】
さらに、トルク検出手段33で検出したトルクがトルク制限値に近付いたときに予報を出力したり、トルク制限値を超えたトルクが検出されたときに警報を出力したりすることもでき、このような予報や警報及びLCD37に表示された情報を読み取ってオペレータがトルク設定つまみ35を操作し、最適な作業状態を保つようにすることもできる。また、回転駆動装置18がリーダ16の最下端に下降したときに作動するリミットスイッチを設けておくことにより、該リミットスイッチによって基準位置、すなわち、昇降位置(高さ)が0mであることを検出することができる。
【符号の説明】
【0017】
11…杭打機、12…下部走行体、13…上部旋回体、14…ベースマシン、15…フロントブラケット、16…リーダ、17…起伏シリンダ、18…回転駆動装置、19…昇降用チェーン、20…昇降用油圧モータ、21…運転室、22…機器室、31…制御装置、32…位置検出手段、33…トルク検出手段、34…作業条件設定手段、35…トルク設定つまみ、36…駆動源制御部、37…LCD
【技術分野】
【0001】
本発明は、杭打機に関し、詳しくは、リーダに沿って昇降する回転駆動装置で鋼管杭やスクリューロッドなどの施工部材を回転させながら地中に圧入する杭打機に関する。
【背景技術】
【0002】
リーダに沿って昇降する回転駆動装置で鋼管杭などの施工部材を地中に回転圧入する杭打機において、リーダに対する回転駆動装置の高さに応じて回転駆動装置の油圧モータに供給する油圧を変化させることにより、リーダへの負担を抑えながら効率よく回転圧入を行えるようにした制御装置が知られている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−232038号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載された制御装置は、回転駆動装置の駆動源として油圧モータを使用している杭打機を対象としたものであり、駆動源として電気モータを使用した回転駆動装置を備えた杭打機には、そのまま適用することができなかった。
【0005】
そこで本発明は、回転駆動装置に設置した駆動源が油圧モータでも電気モータでも対応することができ、回転駆動装置の形式、リーダの形式及び長さ(高さ)、施工部材の変更などにも容易に対応することができる回転駆動装置用制御手段を備えた杭打機を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の杭打機は、リーダに沿って昇降する回転駆動装置によって施工部材を回転させながら地中に圧入する杭打機において、前記リーダにおける前記回転駆動装置の昇降位置を検出する位置検出手段と、前記回転駆動装置の形式、前記リーダの形式及び長さ、前記施工部材の形式をあらかじめ設定する作業条件設定手段と、前記位置検出手段で検出した回転駆動装置の昇降位置及び前記作業条件設定手段に設定された作業条件、前記回転駆動装置に設けられた駆動源の形式に基づいて前記回転駆動装置から前記施工部材に与えるトルクの制限値を演算して表示する制御手段とを備えていることを特徴としている。
【発明の効果】
【0007】
本発明の杭打機によれば、回転駆動装置の昇降位置に基づいて最適なトルク制御を行うことができるので、リーダや、ベースマシンのリーダ取付部、起伏シリンダ、回転駆動装置を昇降可能にガイドするガイド部(ガイドレール、ガイドギブ)などが破損したりすることを防止しながら大きなトルクで施工部材を回転させることができ、作業効率を向上させることができる。さらに、電動式あるいは油圧式といった回転駆動装置の形式、作業条件に応じたリーダの形式や長さ、鋼管杭の圧入あるいは地盤改良といった施工部材の形式などを作業開始前に設定することにより、各種作業条件に応じた最適な状態で作業を行うことができる。
【図面の簡単な説明】
【0008】
【図1】本発明の杭打機の一形態例を示す側面図である。
【図2】制御手段の一形態例を示すブロック図である。
【図3】回転駆動装置の昇降位置とトルク制限値との関係の一例を示す図である。
【発明を実施するための形態】
【0009】
本形態例に示す杭打機11は、クローラを備えた下部走行体12と、該下部走行体12上に旋回可能に設けられた上部旋回体13とで構成されたベースマシン14と、上部旋回体13の前部に設けられたフロントブラケット15に起伏可能に設けられたリーダ16と、該リーダ16を後方から支持する起伏シリンダ17と、前記リーダ16に昇降可能に設けられた回転駆動装置18と、該回転駆動装置18を昇降用チェーン19を介して昇降させる昇降用モータ20と、上部旋回体13に設けられた運転室21及びエンジンや油圧ユニット、発電機などを収納した機器室22とを備えている。
【0010】
さらに、前記リーダ16の下部に配置されている昇降用モータ20には、該昇降用モータ20によって駆動されるスプロケットの回転状態をロータリーエンコーダで検出することによって回転駆動装置18の昇降位置を、リーダ16の最下方に回転駆動装置18が位置した状態を基準として検出するための位置検出手段が設けられている。また、前記回転駆動装置18に装着した鋼管杭やロッドなどの施工部材を回転させるためのトルクを、回転駆動装置18の駆動源が電気モータの場合には電流により、あるいは、油圧モータの場合には油圧により検出するためのトルク検出手段が設けられている。これらの検出手段で検出した回転駆動装置18の昇降位置及びトルクは、運転室21に設けられた制御装置(制御手段)31にそれぞれ伝達される。
【0011】
前記制御装置31は、図2に示すように、位置検出手段32で検出した回転駆動装置18の昇降位置信号32s、トルク検出手段33で検出したトルク信号33s、運転室21の操作盤に設けられた作業条件設定手段34に設定された各種設定信号34s及びオペレータが操作するトルク設定つまみ35に設定されたトルク設定信号35sが入力信号として入力される。また、出力信号としては、前記各信号32s〜35sに基づいて算出したトルク制限信号36sが回転駆動装置18の駆動源制御部36に出力されるとともに、各入力信号に基づく各種表示信号37sが操作盤に設けられているLCD37などに出力される。
【0012】
通常の作業では、回転駆動装置18の昇降位置のみが変数となり、位置検出手段で検出した回転駆動装置18の昇降位置と、作業条件設定手段であらかじめ設定した回転駆動装置18の形式、リーダ16の形式及び長さ、施工部材の形式などの各種作業条件とに基づいて回転駆動装置18のトルク制限値を演算して設定する。すなわち、図3の直線Lに示すように、トルク制限値は、回転駆動装置18がリーダ16の下端部に位置しているとき(昇降位置0%)に最大(トルク制限値100%)となり、回転駆動装置18がリーダ16の上端部(昇降位置100%)に位置しているときに最小(例えばトルク制限値20〜30%)となるように設定される。
【0013】
このとき、前記トルク設定つまみを最大にしたときには、回転駆動装置18の昇降位置に応じたトルク制限値あるいはトルク制限値をあらかじめ設定した割合で下回る値がトルク設定値として回転駆動装置18の駆動源に出力される。一方、トルク設定つまみが中間位置の場合は、図3に破線Laで示すように、トルク設定つまみで設定したトルクがトルク制限値以下の範囲では、トルク設定つまみで設定したトルク設定値がそのまま回転駆動装置18の駆動源に出力されることによって施工部材が一定のトルクで回転し、回転駆動装置18がリーダ16の上方に位置し、トルク設定つまみで設定したトルクがトルク制限値を超える範囲では、トルク制限値がトルク設定値として回転駆動装置18の駆動源に出力されるとともに、これらの情報がLCDなどに表示される。また、作業中に地盤の状態により一時的にトルクが上昇した場合も、トルク制限値を超えることがないように制御される。これにより、リーダ16などの破損を防止しながら大きなトルクで施工部材を回転させて施工することができるので、鋼管杭の圧入作業や地盤改良作業などを効率よく行うことができる。
【0014】
なお、回転駆動装置18のトルク設定は、周知の手法で行うことが可能であり、駆動源に電気モータを使用した電気式回転駆動装置の場合には電気モータに供給する電力の電圧又は電流を制御すればよく、駆動源に油圧モータを使用した油圧式回転駆動装置の場合には油圧モータに供給する作動油の圧力を制御すればよい。さらに、前記トルク制限値は、図3に示すように連続的(直線的)に設定することができるが、リーダ16の適当な長さごと、例えば1mごとなどの範囲で階段状に設定することもできる。
【0015】
また、リーダ16の長さを変更した場合には、前記作業条件設定手段にリーダ16の長さを入力又は選択し、回転駆動装置18をリーダ16の最下端に下降させた位置を基準位置として回転駆動装置18の昇降位置を検出することにより、回転駆動装置18の昇降位置に応じたトルク制限値を前記同様に設定することができる。さらに、鋼管杭を圧入する際には鋼管杭の径や螺旋羽根の状態等を前記作業条件設定手段に入力したりすることにより、鋼管杭の種類に応じたトルク制限値を得ることができ、地盤改良においても、中空ロッドや掘削刃の種類を作業条件設定手段に入力したりすることにより、中空ロッドや掘削刃の種類に応じたトルク制限値を得ることができる。また、回転駆動装置18が電動式か油圧式かも選択可能としておくことにより、現場の状況によって回転駆動装置を交換した場合にも、前記同様にしてトルク制限値を得ることができ、リーダの破損などを防止しながら駆動源に応じた作業を効率よく行うことができる。
【0016】
さらに、トルク検出手段33で検出したトルクがトルク制限値に近付いたときに予報を出力したり、トルク制限値を超えたトルクが検出されたときに警報を出力したりすることもでき、このような予報や警報及びLCD37に表示された情報を読み取ってオペレータがトルク設定つまみ35を操作し、最適な作業状態を保つようにすることもできる。また、回転駆動装置18がリーダ16の最下端に下降したときに作動するリミットスイッチを設けておくことにより、該リミットスイッチによって基準位置、すなわち、昇降位置(高さ)が0mであることを検出することができる。
【符号の説明】
【0017】
11…杭打機、12…下部走行体、13…上部旋回体、14…ベースマシン、15…フロントブラケット、16…リーダ、17…起伏シリンダ、18…回転駆動装置、19…昇降用チェーン、20…昇降用油圧モータ、21…運転室、22…機器室、31…制御装置、32…位置検出手段、33…トルク検出手段、34…作業条件設定手段、35…トルク設定つまみ、36…駆動源制御部、37…LCD
【特許請求の範囲】
【請求項1】
リーダに沿って昇降する回転駆動装置によって施工部材を回転させながら地中に圧入する杭打機において、前記リーダにおける前記回転駆動装置の昇降位置を検出する位置検出手段と、前記回転駆動装置の形式、前記リーダの形式及び長さ、前記施工部材の形式をあらかじめ設定する作業条件設定手段と、前記位置検出手段で検出した回転駆動装置の昇降位置、前記作業条件設定手段に設定された作業条件及び前記回転駆動装置に設けられた駆動源の形式に基づいて前記回転駆動装置から前記施工部材に与えるトルクの制限値を演算して表示する制御手段とを備えていることを特徴とする杭打機。
【請求項1】
リーダに沿って昇降する回転駆動装置によって施工部材を回転させながら地中に圧入する杭打機において、前記リーダにおける前記回転駆動装置の昇降位置を検出する位置検出手段と、前記回転駆動装置の形式、前記リーダの形式及び長さ、前記施工部材の形式をあらかじめ設定する作業条件設定手段と、前記位置検出手段で検出した回転駆動装置の昇降位置、前記作業条件設定手段に設定された作業条件及び前記回転駆動装置に設けられた駆動源の形式に基づいて前記回転駆動装置から前記施工部材に与えるトルクの制限値を演算して表示する制御手段とを備えていることを特徴とする杭打機。
【図1】



【図2】
【図3】

【図2】
【図3】
【公開番号】特開2012−52299(P2012−52299A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−193503(P2010−193503)
【出願日】平成22年8月31日(2010.8.31)
【出願人】(000004617)日本車輌製造株式会社 (722)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年8月31日(2010.8.31)
【出願人】(000004617)日本車輌製造株式会社 (722)
【Fターム(参考)】
[ Back to top ]