
板状ワークの整列方法及び整列装置
【課題】ワークをコンベアの幅方向左右両側から絞ることによって生じるブリッジを回避しつつ、ワークを搬送方向に沿って一列に整列させることができる板状ワークの整列方法及び整列装置を提供する。
【解決手段】ワークwを傾斜台2に供給して滑り落とし、滑り落ちたワークwを、傾斜台2の下部にワークwが滑り落ちる方向と交差する方向に沿って配設された斜めコンベア3によって斜めの姿勢で搬送し、斜めコンベア3上を搬送されるワークwを、幅規制部5によって斜めコンベア3の幅方向の一方から規制することで、斜めコンベア3の隣に並設された水平コンベア4上に滑り落として一列に並べ、水平コンベア4上のワークwを高さ規制部6によって高さ方向に規制して一枚ずつ送出する。
【解決手段】ワークwを傾斜台2に供給して滑り落とし、滑り落ちたワークwを、傾斜台2の下部にワークwが滑り落ちる方向と交差する方向に沿って配設された斜めコンベア3によって斜めの姿勢で搬送し、斜めコンベア3上を搬送されるワークwを、幅規制部5によって斜めコンベア3の幅方向の一方から規制することで、斜めコンベア3の隣に並設された水平コンベア4上に滑り落として一列に並べ、水平コンベア4上のワークwを高さ規制部6によって高さ方向に規制して一枚ずつ送出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、板状のワークをコンベアの搬送方向に沿って一列に整列させる整列方法及び整列装置に関する。
【背景技術】
【0002】
板状のワーク(例えばクラッチプレート等)を次工程で使用する工作機械(例えばプレス機等)に供給する際、ワークをコンベア上にて一列に整列させた状態にして、プレス機に供給することが行われている。
【0003】
従来、板状のワークは、網籠(パレティーナ)にバラ積みされた状態で工場に搬入され、作業員の手作業により1枚ずつプレス機へ向かうコンベア上に供給されるか、或いは複数枚積み重ねて纏められた後に1枚ずつ取り出されてプレス機へのコンベアに供給されていた。非常に単純な作業であるが、プレス機へのワーク供給のために、最低でも一人の作業者が必要となる。
【0004】
ワークをコンベアの搬送方向に沿って一列に整列させる装置として、複数のワークを幅方向に並べて搬送できる幅広コンベアに、搬送方向下流側が狭くなるようにテーパー状に形成された一対のガイドを配置し、幅広コンベア上をランダムな配置で搬送される複数のワークをガイドによって幅方向左右から絞るように案内して、一列に整列させるものが知られている(特許文献1)。かかる装置をプレス機へのワーク自動供給装置に用いることも考えられる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−1128号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし乍ら、コンベアの幅方向両側に一対のテーパー状のガイドを配置すると、コンベア上を搬送される複数のワークがコンベアの幅方向の両側からガイドで絞られるため、下流側において幅方向左右のガイドの間に2個又は3個或いは4個以上のワークが連なってブリッジ(架橋)を作り、ワークが詰まってしまう可能性がある。このため、ガイドを振動させる等してワークのブリッジを崩す対策が必要となっていた。
【0007】
以上の事情を考慮して創案された本発明の目的は、ワークをコンベアの幅方向左右両側から絞ることによって生じるブリッジを回避しつつ、ワークを搬送方向に沿って一列に整列させることができる板状ワークの整列方法及び整列装置を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために創案された本発明に係る板状ワークの整列方法は、ワークを傾斜台に供給して滑り落とし、滑り落ちたワークを、傾斜台の下部にワークが滑り落ちる方向と交差する方向に沿って配設された斜めコンベアによって、斜めの姿勢で搬送し、斜めコンベア上を搬送されるワークを、斜めコンベアの幅方向の一方から規制することで、斜めコンベアの隣に並設された水平コンベア上に滑り落として一列に並べ、水平コンベア上のワークを高さ方向に規制して一枚ずつ送出するようにしたことを特徴とする。
【0009】
また、本発明に係る板状ワークの整列装置は、ワークが供給されて滑り落ちる傾斜台と、傾斜台の下部に、ワークが滑り落ちる方向と交差する方向に沿って、傾斜台の傾斜角度に応じて斜めに配設された斜めコンベアと、斜めコンベアに隣り合うように設けられ、ワークを水平姿勢で搬送する水平コンベアと、斜めコンベア上を搬送されるワークを斜めコンベアの幅方向の一方から規制して水平コンベア上に案内する幅規制部と、幅規制部で案内された水平コンベア上のワークを高さ方向に規制して一枚ずつ送出する高さ規制部とを備えたことを特徴とする。
【0010】
斜めコンベアの搬送速度と水平コンベアの搬送速度とが異なっていてもよい。
【0011】
傾斜台に複数のワークを供給するための供給手段を備え、供給手段が、複数のワークを保持又は解放するチャックと、チャックに保持されたワークを傾斜台の傾斜角度に合わせて傾斜台に近付けるアームとを有する多関節ロボットであってもよい。
【0012】
供給手段が、バラ積みされた複数のワークの配置を撮影するカメラを備え、カメラで撮影された画像に基づき、チャックのワークに対するアプローチ位置を変更する機能を有していてもよい。
【発明の効果】
【0013】
本発明に係る板状ワークの整列方法及び整列装置によれば、斜めコンベアによって斜めの姿勢で搬送されるワークを、斜めコンベアの幅方向の一方から規制して水平コンベア上に滑り落として一列に並べている。従って、ワークをコンベアの幅方向の左右両側から絞ることによって生じるブリッジを回避しつつ、板状のワークを水平コンベア上に一列に整列させることができる。また、斜めコンベアから水平コンベアに滑り落ちた板状のワークが仮に水平コンベア上にて上下に重なったとしても、それらのワークは高さ方向に規制されることで一枚ずつ送出される。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る板状ワークの整列装置を示す平面図である。
【図2】図1のII−II線矢視図である。
【図3】図1のIII−III線矢視図である。
【図4】図1のIV−IV線矢視図である。
【図5】本実施形態に係る整列装置の供給手段を構成するチャックの部分の下面図である。
【図6】本実施形態に係る整列装置のチャックに保持されたワークを傾斜台にその傾斜角度に合わせて近付けた様子を示す側面図である。
【発明を実施するための形態】
【0015】
以下に添付図面を参照しながら、本発明の好適な実施形態について詳細に説明する。かかる実施形態に示す寸法、材料、その他具体的な数値等は、発明の理解を容易にするための例示に過ぎず、特に断る場合を除き、本発明を限定するものではない。なお、本明細書及び図面において、実質的に同一の機能、構成を有する要素については、同一の符号を付することにより重複説明を省略し、また本発明に直接関係のない要素は図示を省略する。
【0016】
本発明の一実施形態に係る板状ワーク(以下単にワークとも言う)wの整列装置1を図1〜図6を用いて説明する。図1は本実施形態に係る整列装置1の平面図、図2は図1のII−II線矢視図、図3は図1のIII−III線矢視図、図4は図1のIV−IV線矢視図、図5はチャック8の下面図、図6はチャック8に保持されたワークwを傾斜台2に近付けた側面図である。
【0017】
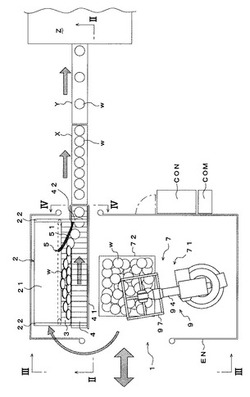
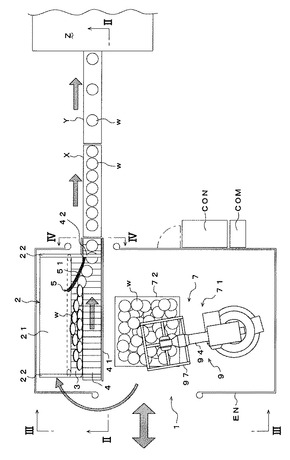
図1〜図4に示すように、本実施形態に係る板状ワークwの整列装置1は、ワークwが供給されて滑り落ちる傾斜台2と、傾斜台2の下部に配設された斜めコンベア3と、斜めコンベア3に並設された水平コンベア4と、斜めコンベア3上のワークwを水平コンベア4に案内する幅規制部5と、水平コンベア4上のワークwを一枚ずつ送出する高さ規制部6とを備えている。また、整列装置1は、傾斜台2に複数のワークwを供給する供給手段7を備えている。供給手段7は、複数のワークwを保持又は解放するチャック8と、チャック8に保持されたワークwを傾斜台2に近付けるアーム9とを有する多関節ロボット71から主に構成されている。
【0018】
以下、本実施形態に係る板状ワークwの整列装置1を構成要素毎に説明する。
【0019】
(傾斜台)
傾斜台2は、複数(本実施形態では縦横3×3の9個)のワークwを同時に滑り落とすことができる面積の傾斜面21を有している。傾斜面21の傾斜角度θは、ワークwが摩擦で止まることなく滑り落ちる角度以上で、滑り落ちたワークwが斜めの状態から裏返しになって水平コンベア4に載ってしまうことを回避する角度に設定されている。この角度θは、凡そ45度〜60度が好ましい。傾斜台2の両側部には、側壁22が設けられており、傾斜台2上を滑り落ちるワークwが両側部から落下しないようになっている。ワークwは、本実施形態では直径150mm、厚さ2mmの円板が用いられ、クラッチ板の素材となるものである。
【0020】
(斜めコンベア)
傾斜台2の下部には、斜めコンベア3が設けられている。斜めコンベア3は、傾斜台2の下部に、ワークwが滑り落ちる方向と交差する方向(本実施形態では直交方向)に沿って、傾斜面21の傾斜角度θに応じて斜めに配設されている。斜めコンベア3の傾斜角度は、本実施形態では傾斜面21の角度θと同角度に設定されているが、ワークwを斜めコンベア3に沿った斜めの姿勢で搬送できる角度であれば、傾斜面21の角度θより多少大きな或いは小さな角度でも構わない。斜めコンベア3の幅は、ワークwを斜めの姿勢で安定して搬送するため、ワークwの大きさ(直径)の1倍以上2倍以下(本実施形態では約1.5倍)に設定されている。斜めコンベア3には、本実施形態ではベルトコンベアが用いられているが、ローラーコンベアを用いてもよい。
【0021】
(水平コンベア)
斜めコンベア3の隣には、水平コンベア4が設けられている。水平コンベア4は、斜めコンベア3の幅方向の下端に沿って、斜めコンベア3と隣り合うようにして配置されており、ワークwを水平姿勢で搬送するものである。水平コンベア4は、本実施形態ではその搬送方向が地面と平行となるように配置されているが、多少登り勾配或いは下り勾配であっても構わない。水平コンベア4の幅方向の一端(斜めコンベア3とは反対側の端部)には、傾斜台21を滑り落ちたワークwがバウンドしたとしても水平コンベア4から飛び出ることを防止するための側壁41が、水平コンベア4の長手方向に沿って設けられている。水平コンベア4には、本実施形態ではベルトコンベアが用いられているが、ローラーコンベアを用いてもよい。
【0022】
水平コンベア4の搬送速度は、本実施形態では斜めコンベア3の搬送速度と等しく設定されているが、斜めコンベア3の搬送速度より速くすること或いは遅くすることを妨げるものではない。例えば、水平コンベア4及び斜めコンベア3の少なくとも一方の搬送速度を可変に制御できるようにし、双方のコンベア3、4によるワークwの搬送状況に応じて、一方のコンベアの搬送速度を他方のコンベアの搬送速度よりも速く或いは遅くしたり、双方のコンベアの搬送速度を等しくする制御を行ってもよい。
【0023】
(幅規制部)
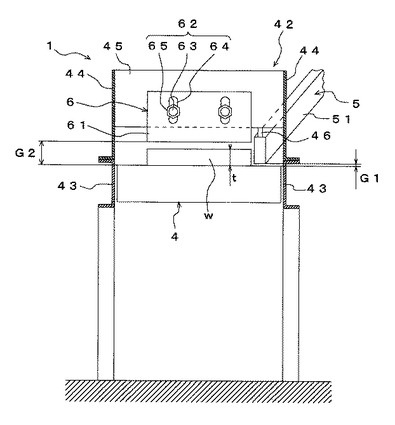
斜めコンベア3の下流側の部分には、斜めコンベア3上を斜めの姿勢で搬送されるワークwを幅方向の一方から規制することで、水平コンベア4上に滑り落とす幅規制部5が配置されている。幅規制部5は、細長い板体を弓型に湾曲させた形状の規制板51からなり、その一端が傾斜台2の傾斜面21に固定され、他端が水平コンベア4の出口部の出口部材(図4参照)42に固定されている。また、規制板51の下面は、斜めコンベア3の搬送面及び水平コンベア4の搬送面から隙間G1(図4参照)が隔てられている。隙間G1は、ワークwの板厚tの1倍未満(好ましくは0.5倍未満)に設定されており、ワークwが隙間G1を潜り抜けないようになっている。本実施形態では、隙間G1はワークwの板厚tの約0.2倍に設定されている。
【0024】
出口部材42は、水平コンベア4の出口部に配置され、図4に示すように、水平コンベア4の幅方向左右のサイドフレーム43に取り付けられた側壁44と、これら側壁44を架け渡して設けられた連結板45とを備えている。連結板45には、幅規制部5を成す規制板51の端部が、ブラケット46等を介して或いは直接固定されている。なお、水平コンベア4の搬送面の幅は、ワークwの大きさ(直径)の2倍未満(好ましくは1.5倍未満)に設定されており、ワークwが水平コンベア4の搬送面に、その幅方向に2個並ぶことはない。本実施形態では、水平コンベア4の搬送面の幅は、ワークwの直径の約1.2倍となっている。
【0025】
(高さ規制部)
出口部材42には、水平コンベア4上を搬送されるワークwを高さ方向に規制して一枚ずつ送出するための高さ規制部6が取り付けられている。高さ規制部6は、出口部材42の連結板45に装着された板体61からなり、その下端と水平コンベア4の搬送面との隙間G2がワークwの板厚tの1倍よりも大きく2倍未満(好ましくは1.2倍以上1.5倍以下)に設定されている。これにより、仮にワークwが2枚以上鉛直方向に重なった状態で水平コンベア4上を搬送されて来ても、板体61の下端と水平コンベア4の搬送面との隙間G2を通過する際に、最下層の一枚のみが通過することになり、ワークwが一枚ずつ送出されることになる。本実施形態では、隙間G2はワークwの板厚tの約1.3倍に設定されている。
【0026】
高さ規制部6を成す板体61は、図4の如く連結板45への取付位置が調節機構62によって上下方向に調節できるようになっており、板厚tの異なった様々なワークwに対応可能となっている。調節機構62は、例えば、連結板45に固定されたボルト63と、ボルト63が挿通されるように板体61に上下方向に細長く形成された長孔64と、長孔64を挿通したボルト63に螺合されるナット65とから構成される。
【0027】
(供給手段)
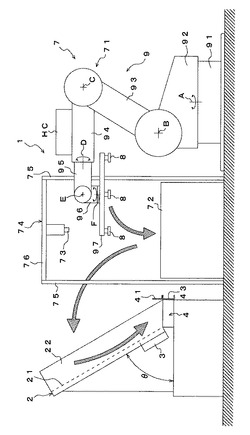
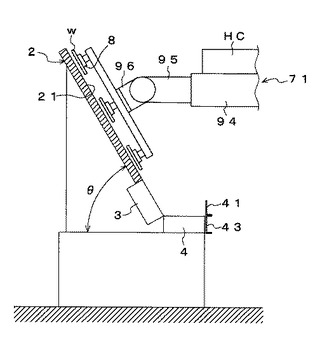
図1〜図3に示すように、傾斜台2には、供給手段7によって複数のワークwが供給される。供給手段7は、複数のワークwを保持又は解放するチャック8と、チャック8に保持されたワークwを傾斜台2に近付けるアーム9とを有する多関節ロボット71から主に構成されている。多関節ロボット71は、基盤91に取り付けられ鉛直軸A回りに回動する基台92と、基台92に取り付けられ水平軸B回りに回動する第1アーム93と、第1アーム93に取り付けられ軸Bと平行な軸C回りに回動する第2アーム94と、第2アーム94に取り付けられその長手方向の軸D回りに回動する先端アーム95と、先端アーム95に取り付けられ軸Dと直交する軸E回りに回動する第3アーム96と、第3アーム96に取り付けられ軸Eと直交する軸F回りに回動するハンド97と、ハンド97に取り付けられたチャック8とを備えている。かかる6軸の多関節ロボット71は、各関節を作動させることで、ハンド97のチャック8を様々な姿勢に制御できる。
【0028】
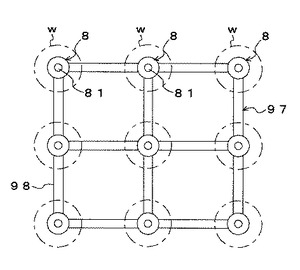
ハンド97は、図5に示すように、平面視で格子状に形成された枠体98を有し、枠体98には、ワークwを保持又は解放するチャック8が複数取り付けられている。本実施形態では、チャック8は枠体98に縦横3×3の9個取り付けられているが、9個に限られるものではない。チャック8は、空気を吸い込む(吸引する)吸引口81を有し、バキューム力によってワークwを吸着保持し、吸引を止める或いは逆に空気を吹き出すことでワークwを解放する。なお、チャック8は、バキュームタイプに限られることはなく、電磁石を備えていてそのオンオフにより金属製のワークwを吸着又は解放するものであってもよい。
【0029】
図1〜図3に示すように、多関節ロボット71は、各関節を適宜作動させることで、網籠(パレティーナ)72にバラ積みされたワークwをチャック8に吸着保持し、チャック8に保持したワークを図6に示すように傾斜台2の傾斜角度θに合わせて傾斜面21に近付けた後、ワークwをチャック8から解放する。多関節ロボット71は、10〜20秒間隔で5〜9枚のワークwを網籠72から傾斜台2に搬送するように作動され、各チャック8の全てにワークwが吸着されていなくても構わない。各チャック8にはバキュームセンサが夫々接続されており、ワークwが吸着したか否かを検出できるようになっていて、9個中5個以上のバキュームセンサがワークwの吸着を検出したことを条件にワークwを網籠72から傾斜台2に搬送する。
【0030】
網籠72は、その内部にワークwが水平な姿勢でバラ積みされた状態で工場に搬入され、多関節ロボット71と水平コンベア4との間に配置される。供給手段7は、多関節ロボット71に加えて、網籠72にバラ積みされた複数のワークwの配置を撮影するカメラ73(図3参照)を備えており、カメラ73で撮影された画像に基づき、チャック8のワークwに対するアプローチ位置を変更する機能を有している。具体的には、9個中5個以上のバキュームセンサがワークwの吸着を検出しない場合、カメラ73によって網籠72内のワークwの配置を撮影し、その画像をコンピュータで処理することでチャック8のワークwに対するアプローチ位置をワークwが比較的多く集積されている位置に変更する。カメラ73は、図3に示すように、網籠72の近傍に設けられたフレーム74に取り付けられており、網籠72の上方から網籠72内のワークwの配置を撮影する。フレーム74は、網籠72の両側に立設された柱75と、柱75の頂部を架け渡す梁76とを有し、梁76にカメラ73が下方に向けて取り付けられている。
【0031】
(その他)
図1、図2に示すように、水平コンベア4の出口には、水平コンベア4から排出されたワークwを搬送する第1供給コンベアXが配置され、第1供給コンベアXの出口には、第1供給コンベアXから排出されたワークwを搬送する第2供給コンベアYが配置されている。第2供給コンベアY上のワークwは、次工程で使用する工作機械(プレス機)Zに供給されるようになっている。第2供給コンベアYの搬送速度は第1供給コンベアXの搬送速度よりも速く設定されている。第2供給コンベアY上のワークwの間隔をプレス機Zのワーク投入仕様(スペック)に合わせるためである。
【0032】
本実施形態のプレス機Zは、1分間に26枚のワークwを投入する仕様であり、第2供給コンベアYでのワークwのピッチ(ワークwの中心同士の間隔)を300mmとすると、第2供給コンベアYの搬送速度は約130mm/secとなる。一方、第1供給コンベアXにおいては、ワークwのピッチを160mmとすると、第1供給コンベアXの搬送速度は約69mm/secとなる。なお、本実施形態においては、ワークwの直径は既述のように150mmである。
【0033】
図1に示すように、傾斜台2、斜めコンベア3、水平コンベア4、網籠72、多関節ロボット71は、安全柵ENによって囲われている。図1においてCONは制御盤、COMは画像処理用コンピュータであり、図3においてHCはハンド制御装置である。
【0034】
(作用・効果)
本実施形態に係る板状ワークwの整列装置1を用いた整列方法について述べる。
【0035】
図1示す網籠72にバラ積みされたワークwは、多関節ロボット71のハンド97のチャック8に保持される。チャック8に保持されたワークwは、多関節ロボット71の各関節を適宜作動させることで、図6に示すように、傾斜台2の傾斜面21にその傾斜角度θに合わせて近付けられた後、チャック8から解放される。なお、本実施形態では、ワークwは、その板厚の1倍から3倍程度まで傾斜面21に近付けられた後、チャック8から解放される。各ワークwは、傾斜面21に同角度で近接した状態で解放されるので、傾斜面21に着地した際の衝撃が可及的に抑えられて傷の発生を防止でき、また、ワークwが立ち姿勢となって傾斜面21を転がり落ちることを防止できる。
【0036】
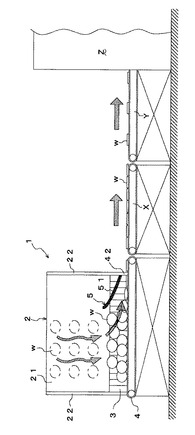
チャック8から解放されたワークwは、図2に示すように、傾斜面21を滑り降り、その下端が水平コンベア4の幅方向端部で支持された状態で、斜めコンベア3によって斜めの姿勢で搬送される。斜めコンベア3上を斜めの姿勢で搬送されるワークwは、図1にも示すように、幅規制部5を構成する規制板51によって斜めコンベア3の幅方向の一方(上方)から規制され、斜めコンベア3から水平コンベア4上に滑り降ろされて一列に並べられる。これにより、従来、ワークwをコンベアの幅方向の左右両側から絞ることによって生じていたブリッジを回避しつつ、板状のワークwを水平コンベア4上に一列に整列させることができる。
【0037】
ここで、水平コンベア4の搬送面の幅が、ワークwの大きさ(直径)の2倍未満(本実施形態では約1.2倍)に設定されているため、ワークwが水平コンベア4の搬送面に、その幅方向に2個並ぶことはない。従って、ワークwが水平コンベア4上に2個幅方向に並ぶことによるブリッジを回避できる。また、仮に、斜めコンベア3から水平コンベア4に滑り落ちた板状のワークwが水平コンベア4上にて複数枚上下に重なったとしても、それらのワークwは、図4に示す高さ規制部6を構成する板体61によって高さ方向に規制されることで、水平コンベア4の出口部から一枚ずつ送出される。
【0038】
ところで、傾斜面21を滑り降りたワークwが、斜めコンベア3に沿った斜めの姿勢となるのではなく、水平コンベア4の幅方向の端部や斜めコンベア3上に既に存在するワークwにバウンドし、斜めコンベア3から離反する事態も考えられる。この場合であっても、バウンドしたワークwは、斜めコンベア3に並設された水平コンベア4に捕捉され、水平コンベア4によって搬送されるため、問題は生じない。なお、バウンドしたワークwが水平コンベア4から落下する事態は、水平コンベア4の側部に沿って設けられた側壁41によって防止される。
【0039】
図1、図2に示すように、斜めコンベア3に沿った斜めの姿勢で搬送されるワーク(円板)wは、その厚さ方向の下面が斜めコンベア3に接触し、鉛直方向の下端が水平コンベア4に接触した状態で搬送される。かかるワークwは、水平コンベア4の搬送速度と斜めコンベア3の搬送速度とを等しくした場合には回転(自転)することなく搬送され、水平コンベア4の搬送速度を斜めコンベア3の搬送速度よりも速く或いは遅くした場合には回転しつつ搬送されることになる。斜めコンベア3上のワークwが回転すると、そのワークwの鉛直方向の上端(上縁)に斜めの姿勢で積み重ねられた上段のワークw(図1、図2参照)が接触回転駆動され、上段のワークwが落ち易くなる。
【0040】
水平コンベア4の搬送速度を斜めコンベア3の搬送速度よりも速くすると、図1において斜めコンベア3上のワークwが反時計回り回転するため、ワークwが幅規制部5を成す規制板51に接触したとき、ワークwが規制板51に沿って転がり、スムーズに水平コンベア4に滑り降ろされる。逆に、斜めコンベア3の搬送速度を水平コンベア4の搬送速度よりも速くすると、斜めコンベア3上にストレージされるワークの数を減らすことができ、斜めコンベア3にてワークwが斜め姿勢で積み重なる状況を抑制できる。
【0041】
以上、添付図面を参照しつつ本発明の好適な実施形態について説明したが、本発明は上述した各実施形態に限定されないことは勿論であり、特許請求の範囲に記載された範疇における各種の変更例又は修正例についても、本発明の技術的範囲に属することは言うまでもない。
【産業上の利用可能性】
【0042】
本発明は、板状のワークをコンベアの搬送方向に沿って一列に整列させる整列方法及び整列装置に利用できる。
【符号の説明】
【0043】
w ワーク
1 整列装置
2 傾斜台
3 斜めコンベア
4 水平コンベア
5 幅規制部
6 高さ規制部
7 供給手段
71 多関節ロボット
73 カメラ
8 チャック
9 アーム
θ 傾斜角度
【技術分野】
【0001】
本発明は、板状のワークをコンベアの搬送方向に沿って一列に整列させる整列方法及び整列装置に関する。
【背景技術】
【0002】
板状のワーク(例えばクラッチプレート等)を次工程で使用する工作機械(例えばプレス機等)に供給する際、ワークをコンベア上にて一列に整列させた状態にして、プレス機に供給することが行われている。
【0003】
従来、板状のワークは、網籠(パレティーナ)にバラ積みされた状態で工場に搬入され、作業員の手作業により1枚ずつプレス機へ向かうコンベア上に供給されるか、或いは複数枚積み重ねて纏められた後に1枚ずつ取り出されてプレス機へのコンベアに供給されていた。非常に単純な作業であるが、プレス機へのワーク供給のために、最低でも一人の作業者が必要となる。
【0004】
ワークをコンベアの搬送方向に沿って一列に整列させる装置として、複数のワークを幅方向に並べて搬送できる幅広コンベアに、搬送方向下流側が狭くなるようにテーパー状に形成された一対のガイドを配置し、幅広コンベア上をランダムな配置で搬送される複数のワークをガイドによって幅方向左右から絞るように案内して、一列に整列させるものが知られている(特許文献1)。かかる装置をプレス機へのワーク自動供給装置に用いることも考えられる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−1128号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし乍ら、コンベアの幅方向両側に一対のテーパー状のガイドを配置すると、コンベア上を搬送される複数のワークがコンベアの幅方向の両側からガイドで絞られるため、下流側において幅方向左右のガイドの間に2個又は3個或いは4個以上のワークが連なってブリッジ(架橋)を作り、ワークが詰まってしまう可能性がある。このため、ガイドを振動させる等してワークのブリッジを崩す対策が必要となっていた。
【0007】
以上の事情を考慮して創案された本発明の目的は、ワークをコンベアの幅方向左右両側から絞ることによって生じるブリッジを回避しつつ、ワークを搬送方向に沿って一列に整列させることができる板状ワークの整列方法及び整列装置を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために創案された本発明に係る板状ワークの整列方法は、ワークを傾斜台に供給して滑り落とし、滑り落ちたワークを、傾斜台の下部にワークが滑り落ちる方向と交差する方向に沿って配設された斜めコンベアによって、斜めの姿勢で搬送し、斜めコンベア上を搬送されるワークを、斜めコンベアの幅方向の一方から規制することで、斜めコンベアの隣に並設された水平コンベア上に滑り落として一列に並べ、水平コンベア上のワークを高さ方向に規制して一枚ずつ送出するようにしたことを特徴とする。
【0009】
また、本発明に係る板状ワークの整列装置は、ワークが供給されて滑り落ちる傾斜台と、傾斜台の下部に、ワークが滑り落ちる方向と交差する方向に沿って、傾斜台の傾斜角度に応じて斜めに配設された斜めコンベアと、斜めコンベアに隣り合うように設けられ、ワークを水平姿勢で搬送する水平コンベアと、斜めコンベア上を搬送されるワークを斜めコンベアの幅方向の一方から規制して水平コンベア上に案内する幅規制部と、幅規制部で案内された水平コンベア上のワークを高さ方向に規制して一枚ずつ送出する高さ規制部とを備えたことを特徴とする。
【0010】
斜めコンベアの搬送速度と水平コンベアの搬送速度とが異なっていてもよい。
【0011】
傾斜台に複数のワークを供給するための供給手段を備え、供給手段が、複数のワークを保持又は解放するチャックと、チャックに保持されたワークを傾斜台の傾斜角度に合わせて傾斜台に近付けるアームとを有する多関節ロボットであってもよい。
【0012】
供給手段が、バラ積みされた複数のワークの配置を撮影するカメラを備え、カメラで撮影された画像に基づき、チャックのワークに対するアプローチ位置を変更する機能を有していてもよい。
【発明の効果】
【0013】
本発明に係る板状ワークの整列方法及び整列装置によれば、斜めコンベアによって斜めの姿勢で搬送されるワークを、斜めコンベアの幅方向の一方から規制して水平コンベア上に滑り落として一列に並べている。従って、ワークをコンベアの幅方向の左右両側から絞ることによって生じるブリッジを回避しつつ、板状のワークを水平コンベア上に一列に整列させることができる。また、斜めコンベアから水平コンベアに滑り落ちた板状のワークが仮に水平コンベア上にて上下に重なったとしても、それらのワークは高さ方向に規制されることで一枚ずつ送出される。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る板状ワークの整列装置を示す平面図である。
【図2】図1のII−II線矢視図である。
【図3】図1のIII−III線矢視図である。
【図4】図1のIV−IV線矢視図である。
【図5】本実施形態に係る整列装置の供給手段を構成するチャックの部分の下面図である。
【図6】本実施形態に係る整列装置のチャックに保持されたワークを傾斜台にその傾斜角度に合わせて近付けた様子を示す側面図である。
【発明を実施するための形態】
【0015】
以下に添付図面を参照しながら、本発明の好適な実施形態について詳細に説明する。かかる実施形態に示す寸法、材料、その他具体的な数値等は、発明の理解を容易にするための例示に過ぎず、特に断る場合を除き、本発明を限定するものではない。なお、本明細書及び図面において、実質的に同一の機能、構成を有する要素については、同一の符号を付することにより重複説明を省略し、また本発明に直接関係のない要素は図示を省略する。
【0016】
本発明の一実施形態に係る板状ワーク(以下単にワークとも言う)wの整列装置1を図1〜図6を用いて説明する。図1は本実施形態に係る整列装置1の平面図、図2は図1のII−II線矢視図、図3は図1のIII−III線矢視図、図4は図1のIV−IV線矢視図、図5はチャック8の下面図、図6はチャック8に保持されたワークwを傾斜台2に近付けた側面図である。
【0017】
図1〜図4に示すように、本実施形態に係る板状ワークwの整列装置1は、ワークwが供給されて滑り落ちる傾斜台2と、傾斜台2の下部に配設された斜めコンベア3と、斜めコンベア3に並設された水平コンベア4と、斜めコンベア3上のワークwを水平コンベア4に案内する幅規制部5と、水平コンベア4上のワークwを一枚ずつ送出する高さ規制部6とを備えている。また、整列装置1は、傾斜台2に複数のワークwを供給する供給手段7を備えている。供給手段7は、複数のワークwを保持又は解放するチャック8と、チャック8に保持されたワークwを傾斜台2に近付けるアーム9とを有する多関節ロボット71から主に構成されている。
【0018】
以下、本実施形態に係る板状ワークwの整列装置1を構成要素毎に説明する。
【0019】
(傾斜台)
傾斜台2は、複数(本実施形態では縦横3×3の9個)のワークwを同時に滑り落とすことができる面積の傾斜面21を有している。傾斜面21の傾斜角度θは、ワークwが摩擦で止まることなく滑り落ちる角度以上で、滑り落ちたワークwが斜めの状態から裏返しになって水平コンベア4に載ってしまうことを回避する角度に設定されている。この角度θは、凡そ45度〜60度が好ましい。傾斜台2の両側部には、側壁22が設けられており、傾斜台2上を滑り落ちるワークwが両側部から落下しないようになっている。ワークwは、本実施形態では直径150mm、厚さ2mmの円板が用いられ、クラッチ板の素材となるものである。
【0020】
(斜めコンベア)
傾斜台2の下部には、斜めコンベア3が設けられている。斜めコンベア3は、傾斜台2の下部に、ワークwが滑り落ちる方向と交差する方向(本実施形態では直交方向)に沿って、傾斜面21の傾斜角度θに応じて斜めに配設されている。斜めコンベア3の傾斜角度は、本実施形態では傾斜面21の角度θと同角度に設定されているが、ワークwを斜めコンベア3に沿った斜めの姿勢で搬送できる角度であれば、傾斜面21の角度θより多少大きな或いは小さな角度でも構わない。斜めコンベア3の幅は、ワークwを斜めの姿勢で安定して搬送するため、ワークwの大きさ(直径)の1倍以上2倍以下(本実施形態では約1.5倍)に設定されている。斜めコンベア3には、本実施形態ではベルトコンベアが用いられているが、ローラーコンベアを用いてもよい。
【0021】
(水平コンベア)
斜めコンベア3の隣には、水平コンベア4が設けられている。水平コンベア4は、斜めコンベア3の幅方向の下端に沿って、斜めコンベア3と隣り合うようにして配置されており、ワークwを水平姿勢で搬送するものである。水平コンベア4は、本実施形態ではその搬送方向が地面と平行となるように配置されているが、多少登り勾配或いは下り勾配であっても構わない。水平コンベア4の幅方向の一端(斜めコンベア3とは反対側の端部)には、傾斜台21を滑り落ちたワークwがバウンドしたとしても水平コンベア4から飛び出ることを防止するための側壁41が、水平コンベア4の長手方向に沿って設けられている。水平コンベア4には、本実施形態ではベルトコンベアが用いられているが、ローラーコンベアを用いてもよい。
【0022】
水平コンベア4の搬送速度は、本実施形態では斜めコンベア3の搬送速度と等しく設定されているが、斜めコンベア3の搬送速度より速くすること或いは遅くすることを妨げるものではない。例えば、水平コンベア4及び斜めコンベア3の少なくとも一方の搬送速度を可変に制御できるようにし、双方のコンベア3、4によるワークwの搬送状況に応じて、一方のコンベアの搬送速度を他方のコンベアの搬送速度よりも速く或いは遅くしたり、双方のコンベアの搬送速度を等しくする制御を行ってもよい。
【0023】
(幅規制部)
斜めコンベア3の下流側の部分には、斜めコンベア3上を斜めの姿勢で搬送されるワークwを幅方向の一方から規制することで、水平コンベア4上に滑り落とす幅規制部5が配置されている。幅規制部5は、細長い板体を弓型に湾曲させた形状の規制板51からなり、その一端が傾斜台2の傾斜面21に固定され、他端が水平コンベア4の出口部の出口部材(図4参照)42に固定されている。また、規制板51の下面は、斜めコンベア3の搬送面及び水平コンベア4の搬送面から隙間G1(図4参照)が隔てられている。隙間G1は、ワークwの板厚tの1倍未満(好ましくは0.5倍未満)に設定されており、ワークwが隙間G1を潜り抜けないようになっている。本実施形態では、隙間G1はワークwの板厚tの約0.2倍に設定されている。
【0024】
出口部材42は、水平コンベア4の出口部に配置され、図4に示すように、水平コンベア4の幅方向左右のサイドフレーム43に取り付けられた側壁44と、これら側壁44を架け渡して設けられた連結板45とを備えている。連結板45には、幅規制部5を成す規制板51の端部が、ブラケット46等を介して或いは直接固定されている。なお、水平コンベア4の搬送面の幅は、ワークwの大きさ(直径)の2倍未満(好ましくは1.5倍未満)に設定されており、ワークwが水平コンベア4の搬送面に、その幅方向に2個並ぶことはない。本実施形態では、水平コンベア4の搬送面の幅は、ワークwの直径の約1.2倍となっている。
【0025】
(高さ規制部)
出口部材42には、水平コンベア4上を搬送されるワークwを高さ方向に規制して一枚ずつ送出するための高さ規制部6が取り付けられている。高さ規制部6は、出口部材42の連結板45に装着された板体61からなり、その下端と水平コンベア4の搬送面との隙間G2がワークwの板厚tの1倍よりも大きく2倍未満(好ましくは1.2倍以上1.5倍以下)に設定されている。これにより、仮にワークwが2枚以上鉛直方向に重なった状態で水平コンベア4上を搬送されて来ても、板体61の下端と水平コンベア4の搬送面との隙間G2を通過する際に、最下層の一枚のみが通過することになり、ワークwが一枚ずつ送出されることになる。本実施形態では、隙間G2はワークwの板厚tの約1.3倍に設定されている。
【0026】
高さ規制部6を成す板体61は、図4の如く連結板45への取付位置が調節機構62によって上下方向に調節できるようになっており、板厚tの異なった様々なワークwに対応可能となっている。調節機構62は、例えば、連結板45に固定されたボルト63と、ボルト63が挿通されるように板体61に上下方向に細長く形成された長孔64と、長孔64を挿通したボルト63に螺合されるナット65とから構成される。
【0027】
(供給手段)
図1〜図3に示すように、傾斜台2には、供給手段7によって複数のワークwが供給される。供給手段7は、複数のワークwを保持又は解放するチャック8と、チャック8に保持されたワークwを傾斜台2に近付けるアーム9とを有する多関節ロボット71から主に構成されている。多関節ロボット71は、基盤91に取り付けられ鉛直軸A回りに回動する基台92と、基台92に取り付けられ水平軸B回りに回動する第1アーム93と、第1アーム93に取り付けられ軸Bと平行な軸C回りに回動する第2アーム94と、第2アーム94に取り付けられその長手方向の軸D回りに回動する先端アーム95と、先端アーム95に取り付けられ軸Dと直交する軸E回りに回動する第3アーム96と、第3アーム96に取り付けられ軸Eと直交する軸F回りに回動するハンド97と、ハンド97に取り付けられたチャック8とを備えている。かかる6軸の多関節ロボット71は、各関節を作動させることで、ハンド97のチャック8を様々な姿勢に制御できる。
【0028】
ハンド97は、図5に示すように、平面視で格子状に形成された枠体98を有し、枠体98には、ワークwを保持又は解放するチャック8が複数取り付けられている。本実施形態では、チャック8は枠体98に縦横3×3の9個取り付けられているが、9個に限られるものではない。チャック8は、空気を吸い込む(吸引する)吸引口81を有し、バキューム力によってワークwを吸着保持し、吸引を止める或いは逆に空気を吹き出すことでワークwを解放する。なお、チャック8は、バキュームタイプに限られることはなく、電磁石を備えていてそのオンオフにより金属製のワークwを吸着又は解放するものであってもよい。
【0029】
図1〜図3に示すように、多関節ロボット71は、各関節を適宜作動させることで、網籠(パレティーナ)72にバラ積みされたワークwをチャック8に吸着保持し、チャック8に保持したワークを図6に示すように傾斜台2の傾斜角度θに合わせて傾斜面21に近付けた後、ワークwをチャック8から解放する。多関節ロボット71は、10〜20秒間隔で5〜9枚のワークwを網籠72から傾斜台2に搬送するように作動され、各チャック8の全てにワークwが吸着されていなくても構わない。各チャック8にはバキュームセンサが夫々接続されており、ワークwが吸着したか否かを検出できるようになっていて、9個中5個以上のバキュームセンサがワークwの吸着を検出したことを条件にワークwを網籠72から傾斜台2に搬送する。
【0030】
網籠72は、その内部にワークwが水平な姿勢でバラ積みされた状態で工場に搬入され、多関節ロボット71と水平コンベア4との間に配置される。供給手段7は、多関節ロボット71に加えて、網籠72にバラ積みされた複数のワークwの配置を撮影するカメラ73(図3参照)を備えており、カメラ73で撮影された画像に基づき、チャック8のワークwに対するアプローチ位置を変更する機能を有している。具体的には、9個中5個以上のバキュームセンサがワークwの吸着を検出しない場合、カメラ73によって網籠72内のワークwの配置を撮影し、その画像をコンピュータで処理することでチャック8のワークwに対するアプローチ位置をワークwが比較的多く集積されている位置に変更する。カメラ73は、図3に示すように、網籠72の近傍に設けられたフレーム74に取り付けられており、網籠72の上方から網籠72内のワークwの配置を撮影する。フレーム74は、網籠72の両側に立設された柱75と、柱75の頂部を架け渡す梁76とを有し、梁76にカメラ73が下方に向けて取り付けられている。
【0031】
(その他)
図1、図2に示すように、水平コンベア4の出口には、水平コンベア4から排出されたワークwを搬送する第1供給コンベアXが配置され、第1供給コンベアXの出口には、第1供給コンベアXから排出されたワークwを搬送する第2供給コンベアYが配置されている。第2供給コンベアY上のワークwは、次工程で使用する工作機械(プレス機)Zに供給されるようになっている。第2供給コンベアYの搬送速度は第1供給コンベアXの搬送速度よりも速く設定されている。第2供給コンベアY上のワークwの間隔をプレス機Zのワーク投入仕様(スペック)に合わせるためである。
【0032】
本実施形態のプレス機Zは、1分間に26枚のワークwを投入する仕様であり、第2供給コンベアYでのワークwのピッチ(ワークwの中心同士の間隔)を300mmとすると、第2供給コンベアYの搬送速度は約130mm/secとなる。一方、第1供給コンベアXにおいては、ワークwのピッチを160mmとすると、第1供給コンベアXの搬送速度は約69mm/secとなる。なお、本実施形態においては、ワークwの直径は既述のように150mmである。
【0033】
図1に示すように、傾斜台2、斜めコンベア3、水平コンベア4、網籠72、多関節ロボット71は、安全柵ENによって囲われている。図1においてCONは制御盤、COMは画像処理用コンピュータであり、図3においてHCはハンド制御装置である。
【0034】
(作用・効果)
本実施形態に係る板状ワークwの整列装置1を用いた整列方法について述べる。
【0035】
図1示す網籠72にバラ積みされたワークwは、多関節ロボット71のハンド97のチャック8に保持される。チャック8に保持されたワークwは、多関節ロボット71の各関節を適宜作動させることで、図6に示すように、傾斜台2の傾斜面21にその傾斜角度θに合わせて近付けられた後、チャック8から解放される。なお、本実施形態では、ワークwは、その板厚の1倍から3倍程度まで傾斜面21に近付けられた後、チャック8から解放される。各ワークwは、傾斜面21に同角度で近接した状態で解放されるので、傾斜面21に着地した際の衝撃が可及的に抑えられて傷の発生を防止でき、また、ワークwが立ち姿勢となって傾斜面21を転がり落ちることを防止できる。
【0036】
チャック8から解放されたワークwは、図2に示すように、傾斜面21を滑り降り、その下端が水平コンベア4の幅方向端部で支持された状態で、斜めコンベア3によって斜めの姿勢で搬送される。斜めコンベア3上を斜めの姿勢で搬送されるワークwは、図1にも示すように、幅規制部5を構成する規制板51によって斜めコンベア3の幅方向の一方(上方)から規制され、斜めコンベア3から水平コンベア4上に滑り降ろされて一列に並べられる。これにより、従来、ワークwをコンベアの幅方向の左右両側から絞ることによって生じていたブリッジを回避しつつ、板状のワークwを水平コンベア4上に一列に整列させることができる。
【0037】
ここで、水平コンベア4の搬送面の幅が、ワークwの大きさ(直径)の2倍未満(本実施形態では約1.2倍)に設定されているため、ワークwが水平コンベア4の搬送面に、その幅方向に2個並ぶことはない。従って、ワークwが水平コンベア4上に2個幅方向に並ぶことによるブリッジを回避できる。また、仮に、斜めコンベア3から水平コンベア4に滑り落ちた板状のワークwが水平コンベア4上にて複数枚上下に重なったとしても、それらのワークwは、図4に示す高さ規制部6を構成する板体61によって高さ方向に規制されることで、水平コンベア4の出口部から一枚ずつ送出される。
【0038】
ところで、傾斜面21を滑り降りたワークwが、斜めコンベア3に沿った斜めの姿勢となるのではなく、水平コンベア4の幅方向の端部や斜めコンベア3上に既に存在するワークwにバウンドし、斜めコンベア3から離反する事態も考えられる。この場合であっても、バウンドしたワークwは、斜めコンベア3に並設された水平コンベア4に捕捉され、水平コンベア4によって搬送されるため、問題は生じない。なお、バウンドしたワークwが水平コンベア4から落下する事態は、水平コンベア4の側部に沿って設けられた側壁41によって防止される。
【0039】
図1、図2に示すように、斜めコンベア3に沿った斜めの姿勢で搬送されるワーク(円板)wは、その厚さ方向の下面が斜めコンベア3に接触し、鉛直方向の下端が水平コンベア4に接触した状態で搬送される。かかるワークwは、水平コンベア4の搬送速度と斜めコンベア3の搬送速度とを等しくした場合には回転(自転)することなく搬送され、水平コンベア4の搬送速度を斜めコンベア3の搬送速度よりも速く或いは遅くした場合には回転しつつ搬送されることになる。斜めコンベア3上のワークwが回転すると、そのワークwの鉛直方向の上端(上縁)に斜めの姿勢で積み重ねられた上段のワークw(図1、図2参照)が接触回転駆動され、上段のワークwが落ち易くなる。
【0040】
水平コンベア4の搬送速度を斜めコンベア3の搬送速度よりも速くすると、図1において斜めコンベア3上のワークwが反時計回り回転するため、ワークwが幅規制部5を成す規制板51に接触したとき、ワークwが規制板51に沿って転がり、スムーズに水平コンベア4に滑り降ろされる。逆に、斜めコンベア3の搬送速度を水平コンベア4の搬送速度よりも速くすると、斜めコンベア3上にストレージされるワークの数を減らすことができ、斜めコンベア3にてワークwが斜め姿勢で積み重なる状況を抑制できる。
【0041】
以上、添付図面を参照しつつ本発明の好適な実施形態について説明したが、本発明は上述した各実施形態に限定されないことは勿論であり、特許請求の範囲に記載された範疇における各種の変更例又は修正例についても、本発明の技術的範囲に属することは言うまでもない。
【産業上の利用可能性】
【0042】
本発明は、板状のワークをコンベアの搬送方向に沿って一列に整列させる整列方法及び整列装置に利用できる。
【符号の説明】
【0043】
w ワーク
1 整列装置
2 傾斜台
3 斜めコンベア
4 水平コンベア
5 幅規制部
6 高さ規制部
7 供給手段
71 多関節ロボット
73 カメラ
8 チャック
9 アーム
θ 傾斜角度
【特許請求の範囲】
【請求項1】
板状のワークを整列させる整列方法であって、
前記ワークを傾斜台に供給して滑り落とし、
滑り落ちたワークを、前記傾斜台の下部にワークが滑り落ちる方向と交差する方向に沿って配設された斜めコンベアによって、斜めの姿勢で搬送し、
前記斜めコンベア上を搬送されるワークを、前記斜めコンベアの幅方向の一方から規制することで、前記斜めコンベアの隣に並設された水平コンベア上に滑り落として一列に並べ、
該水平コンベア上のワークを高さ方向に規制して一枚ずつ送出する
ことを特徴とする板状ワークの整列方法。
【請求項2】
板状のワークを整列させる整列装置であって、
前記ワークが供給されて滑り落ちる傾斜台と、
該傾斜台の下部に、ワークが滑り落ちる方向と交差する方向に沿って、前記傾斜台の傾斜角度に応じて斜めに配設された斜めコンベアと、
該斜めコンベアに隣り合うように設けられ、ワークを水平姿勢で搬送する水平コンベアと、
前記斜めコンベア上を搬送されるワークを前記斜めコンベアの幅方向の一方から規制して前記水平コンベア上に案内する幅規制部と、
該幅規制部で案内された前記水平コンベア上のワークを高さ方向に規制して一枚ずつ送出する高さ規制部と
を備えたことを特徴とする板状ワークの整列装置。
【請求項3】
前記斜めコンベアの搬送速度と前記水平コンベアの搬送速度とが異なっている請求項2に記載の板状ワークの整列装置。
【請求項4】
前記傾斜台に複数のワークを供給するための供給手段を備え、該供給手段が、複数のワークを保持又は解放するチャックと、該チャックに保持されたワークを前記傾斜台の傾斜角度に合わせて前記傾斜台に近付けるアームとを有する多関節ロボットである請求項2又は3に記載の板状ワークの整列装置。
【請求項5】
前記供給手段が、バラ積みされた複数のワークの配置を撮影するカメラを備え、該カメラで撮影された画像に基づき、前記チャックのワークに対するアプローチ位置を変更する機能を有するものである請求項4に記載の板状ワークの整列装置。
【請求項1】
板状のワークを整列させる整列方法であって、
前記ワークを傾斜台に供給して滑り落とし、
滑り落ちたワークを、前記傾斜台の下部にワークが滑り落ちる方向と交差する方向に沿って配設された斜めコンベアによって、斜めの姿勢で搬送し、
前記斜めコンベア上を搬送されるワークを、前記斜めコンベアの幅方向の一方から規制することで、前記斜めコンベアの隣に並設された水平コンベア上に滑り落として一列に並べ、
該水平コンベア上のワークを高さ方向に規制して一枚ずつ送出する
ことを特徴とする板状ワークの整列方法。
【請求項2】
板状のワークを整列させる整列装置であって、
前記ワークが供給されて滑り落ちる傾斜台と、
該傾斜台の下部に、ワークが滑り落ちる方向と交差する方向に沿って、前記傾斜台の傾斜角度に応じて斜めに配設された斜めコンベアと、
該斜めコンベアに隣り合うように設けられ、ワークを水平姿勢で搬送する水平コンベアと、
前記斜めコンベア上を搬送されるワークを前記斜めコンベアの幅方向の一方から規制して前記水平コンベア上に案内する幅規制部と、
該幅規制部で案内された前記水平コンベア上のワークを高さ方向に規制して一枚ずつ送出する高さ規制部と
を備えたことを特徴とする板状ワークの整列装置。
【請求項3】
前記斜めコンベアの搬送速度と前記水平コンベアの搬送速度とが異なっている請求項2に記載の板状ワークの整列装置。
【請求項4】
前記傾斜台に複数のワークを供給するための供給手段を備え、該供給手段が、複数のワークを保持又は解放するチャックと、該チャックに保持されたワークを前記傾斜台の傾斜角度に合わせて前記傾斜台に近付けるアームとを有する多関節ロボットである請求項2又は3に記載の板状ワークの整列装置。
【請求項5】
前記供給手段が、バラ積みされた複数のワークの配置を撮影するカメラを備え、該カメラで撮影された画像に基づき、前記チャックのワークに対するアプローチ位置を変更する機能を有するものである請求項4に記載の板状ワークの整列装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−28413(P2013−28413A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−164079(P2011−164079)
【出願日】平成23年7月27日(2011.7.27)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月27日(2011.7.27)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]