
枝肉の分割方法及び装置
【課題】枝肉の大分割工程で、枝肉の固体差に対応して肋骨等骨部の切断を回避し、滑らかな切断面を形成して骨屑及び肉屑の発生を抑え、切断後の肉部の品質低下を防止する。
【解決手段】枝肉分割装置10は、前中躯体分割部A及び中後躯体分割部Bがレール12に沿って直列配置されている。レール12を移動するギャンブレル14に左右一対の枝肉WR及びWLが懸垂され、前中躯体分割部Aで、レーザポインタ20によって胸骨kの位置にある第1切断点d、g及び肋骨r間の背骨部位の第2切断点e、fを検出し、これら切断点を通る前中躯切断線b、uに沿って前躯体Cを切断する。次に、中後躯体分割部Bで枝肉WR、WLの切断面nを撮像し、これを画像処理して背骨sのもも側最先端関節部の第3切断点h、iを検出し、第3切断点h、iを通る中後躯切断線c,vに沿って中躯体Dを切断する。
【解決手段】枝肉分割装置10は、前中躯体分割部A及び中後躯体分割部Bがレール12に沿って直列配置されている。レール12を移動するギャンブレル14に左右一対の枝肉WR及びWLが懸垂され、前中躯体分割部Aで、レーザポインタ20によって胸骨kの位置にある第1切断点d、g及び肋骨r間の背骨部位の第2切断点e、fを検出し、これら切断点を通る前中躯切断線b、uに沿って前躯体Cを切断する。次に、中後躯体分割部Bで枝肉WR、WLの切断面nを撮像し、これを画像処理して背骨sのもも側最先端関節部の第3切断点h、iを検出し、第3切断点h、iを通る中後躯切断線c,vに沿って中躯体Dを切断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、牛、豚、羊等の家畜屠体を背骨に沿って左右に2分割した枝肉を、前躯体、中躯体及び後躯体に3分割する方法及び装置に関する。
【背景技術】
【0002】
図27は豚屠体の大分割ラインを示す説明図である。牛、豚、羊等、家畜屠体の解体は、まず、温熱雰囲気で頭部、前足首イ1及び後足首ハ1の切断、内蔵摘出等の一次解体処理を行なう。次に、家畜屠体をギャンブレル(股鉤)にもも側足首を介して懸垂し、背側から背骨の真ん中を左右に2分割する。その後、うで・かた部イ(前躯体)、ロース・ばら部ロ(中躯体)及びもも部ハ(後躯体)に大分割する。
【0003】
大分割工程では、機械による自動化技術が開発されてきているが、丸刃やバンドソーを用いた分割を行なうのが主流である。しかし、これらの切断装置を用いた方法では、骨の位置や屠体の形状に応じて、切断位置を調整できないため、前躯体と中躯体の分割の際に、肋骨の切断を回避することが困難であった。また、オペレータが手作業で行なう場合、安全性に問題がある。さらに、家畜屠体の固体差に応じた切断動作ができず、骨を不必要に切断し、骨屑を発生させ、また滑らかな切断面を形成できないという問題がある。また、丸刃を用いた場合、肉屑や骨屑が発生し、切断後の肉部の品質低下が起こる。
【0004】
特許文献1には、特殊な形状をした切断刃を装備した枝肉分割装置が開示されている。この切断刃は回転軸に取り付けられ、刃体が刃先から外周側及び内周側に広がる楔形をなし、外周側に第1の切刃が形成され、内周側に第2の切刃が形成されている。そして、もも側足首を介して懸垂された枝肉に対し、切断刃を水平面内で回転させ、第1の切刃で肉部を切断し、第2の切刃で骨部を切断するようにしている。また、円筒カムが切断刃の回転軸の周囲に設けられ、切断刃と一体のカムフォロワが、該円筒カムの高低差を設けた上面に当接し、家畜屠体の肋骨の湾曲状態に応じて、切断刃が肋骨間隙間を通るように、切断刃を上下動させる構成としている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平2−31639号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
枝肉の大きさ、形状には固体差がある。特許文献1に開示された装置で、この固体差に応じて切断線の位置を調整するためには、枝肉1頭毎に形状の異なる円筒カムに交換する必要がある。このような作業は、大分割工程の作業効率を極端に低下させるので、事実上困難である。そのため、切断刃で枝肉の肋骨を切断することになり、骨屑が発生して切断後の肉部の品質低下が起こるという問題が依然として残る。
【0007】
本発明は、かかる従来技術の課題に鑑み、枝肉の大分割工程で、枝肉の固体差に対応して肋骨等骨部の切断を回避し、かつ回転丸刃やバンドソー等の使用を極力なくし、滑らかな切断面を形成することにより、骨屑及び肉屑の発生を抑え、切断後の肉部の品質低下を防止することを目的とする。
【課題を解決するための手段】
【0008】
かかる目的を達成するため、本発明の枝肉の分割方法は、背骨に沿って左右に2分割された家畜屠体の枝肉をもも側足首を介し懸垂装置で懸垂した状態で前躯体、中躯体及び後躯体に分割する枝肉の分割方法において、頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、第2切断点から胸骨側に向かって肋骨間を通り、肋骨先端から胸骨部位に交わる水平線と、第2切断点から背側輪郭へ向かう水平線とを前中躯体切断線とすると共に、前中躯体切断線が胸骨部位と交わる点を第1切断点とし、第1切断点から第2切断点に向かって前中躯体切断線に沿って前駆体を中躯体から切断する前中躯体分割工程と、背骨のもも側最先端関節部に第3切断点を設定し、寛骨を中躯体側に避けながら第3切断点を通る中後躯切断線に沿って中躯体を後躯体から切断する中後躯体分割工程とからなるものである。
【0009】
前中躯体分割工程では、頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、この第2切断点から肋骨間を通る前中躯体切断線を設定することで、肋骨の切断をなくし、骨屑の発生をなくすことができる。また、滑らかな切断面を形成でき、肉屑の発生を抑え、切断後の肉部の品質低下を防止できる。
【0010】
また、中後躯体分割時に、背骨のもも側最先端関節部を第3切断点とすることで、切断点の特定が容易になる。また、第3切断点を通る中後躯切断線を設定することで、寛骨の切断を回避でき、骨部の切断を最小限に抑えることができる。また、前中躯切断線及び中後躯切断線を枝肉毎に位置決めすることで、枝肉に固体差があっても、またギャンブレルへの吊り下げ時の高さに誤差があっても、肋骨や寛骨の切断を回避でき、骨屑の発生を最小限に抑えることができる。そのため、切断後の肉部の品質劣化を抑えることができる。
【0011】
本発明方法において、前中躯体分割工程が、胸骨部位及び背骨部位を回転丸刃で切断する第1切断ステップと、第1切断ステップの後で、多関節アームに装着されたナイフ状切断刃によって前中躯切断線に沿い残りの肉部を切断する第2切断ステップとからなるものであるとよい。このように、回転丸刃を骨部の切断のみに用い、肉部の切断にはナイフ状切断刃を用いることで、肉部の切断面を滑らかな面とし、肉屑の発生を最小限に抑えることができる。これによって、切断後の肉部の品質劣化を抑えることができる。
【0012】
前中躯体分割工程において、青色の可視光線(以下「青色光」と言う。)を枝肉切断面に照射して肋骨領域を励起発光させ、青色以下の短波長の可視光線をカットし、赤色から緑色の長波長の可視光線(以下「長波長光」と言う。)のみを撮像装置に入光させ、肋骨領域を該撮像装置で撮像する第1撮像ステップと、特定波長の可視光線を除かない白色可視光線(以下「白色光」と言う。)を枝肉切断面に照射して枝肉切断面を撮像装置で撮像する第2撮像ステップと、第1撮像ステップ及び第2撮像ステップで撮像した画像から、肋骨領域及びカタ高さを検出する枝肉検出ステップと、肋骨領域の最も下に位置する肋骨を頭部側から2番目の肋骨と仮設定し、該2番目の肋骨からN番目の肋骨を検出する仮設定ステップと、過去の計測値から、肋骨領域の下端を基準とし、(N−1)番目の肋骨とN番目の肋骨の境界を示す第1の閾値と、カタの高さを基準とし、(N−1)番目の肋骨とN番目の肋骨の境界を示す第2の閾値と、肋骨領域の下端を基準にし、N番目の肋骨と(N+1)番目の肋骨との境界を示す第3の閾値とを求める閾値設定ステップと、仮設定ステップで検出したN番目の肋骨が、第1の閾値及び第2の閾値の平均値より下方に位置するとき、該N番目の肋骨の直上の肋骨をN番目の肋骨とみなす第1修正ステップと、仮設定ステップで検出したN番目の肋骨が、第3の閾値より上方に位置するとき、該N番目の肋骨の直下の肋骨をN番目の肋骨とする第2修正ステップと、左右に2分割された枝肉の肋骨領域の中心と第1の閾値との高さの差を比較し、この差が小さい方の枝肉で得られた肋骨の検出結果を採用する選択ステップとを行うとよい。
【0013】
可視光線は、波長が異なる赤(波長620〜780nm)、橙色(同590〜620nm)、黄色(同570〜590nm)、緑(同495〜570nm)、青(同450〜495nm)及び紫(同380〜450nm)の可視光線で構成されている。第1撮像ステップにおいて、450nm〜495nmの波長を有する青色の可視光線を用いる。また、撮像においては、495nmを上限とし、この波長以下の短波長の可視光線及び紫外線をカットした赤色から緑色の長波長(波長495〜780nm)の可視光線で撮像するとよい。
【0014】
青色光を肋骨領域に照射することで、肋骨に付着した肉、脂肪を励起発光させる。これを長波長光のみで撮像すると、肋骨領域のみが緑色に色付けされ、各肋骨の輪郭が鮮明に識別できる画像を得ることができる。次に、切断面に白色光を当てて撮像すると、枝肉の外郭線及び背骨部位の輪郭が鮮明な画像を得ることができる。これらの画像を用いることで、頭部側からN番目の肋骨を正確に検出できる。
【0015】
N番目とは4番目又は5番目を指す。頭部側から4番目の肋骨と5番目の肋骨との間の背骨部位、又は5番目の肋骨と6番目との肋骨との間の背骨部位に第2切断点を位置決めする場合に、頭部側から4番目又は5番目の肋骨を特定する必要がある。第1撮像ステップ及び第2撮像ステップで得られた画像で、肋骨領域で最も下の肋骨は、最も頭部側に近い肋骨より2番目の肋骨であることが多いため、肋骨領域の最も下の肋骨を頭部側から2番目の肋骨と仮設定する。これから、上方へ向かってN番目の肋骨を検出する。
【0016】
次に、このN番目の肋骨と位置と、過去の計測値から求めた第1の閾値、第2の閾値及び第3の閾値の位置とを比較し、仮設定に対する修正を加える。最後に、左右に2分割された枝肉のうち、肋骨領域の中心と第1の閾値との高さの差が小さい方の検出結果を正として採用することで、誤差を最小限に抑えるようにしている。第1撮像ステップにより、肋骨領域を鮮明に撮像でき、第2撮像ステップにより背骨部位及びカタ高さ(切断面の外郭線上の肩部の位置)を鮮明に撮像できる。こうして撮像した画像で、肋骨領域及びカタ高さを正確に検出できる。そして、正確に検出した肋骨領域及びカタ高さを基準として設定した第1の閾値、第2の閾値及び第3の閾値を用いて、仮設定した肋骨の位置を修正することで、頭部側からN番目の肋骨の位置を正確に求めることができる。
【0017】
本発明方法において、中後躯体分割工程が、枝肉の切断面を撮像する撮像ステップと、撮像した画像から第3切断点を検出する検出ステップと、検出した第3切断点を通る中後躯切断線に沿って後躯体から中躯体を切断する切断ステップとからなるものであるとよい。これによって、中躯体の切断を完全自動化できると共に、前記処理ステップを個々の枝肉毎に行なうことで、大きさや重量が異なる枝肉に対して、中後躯切断線の設定を目標どおりに正確に行なうことができる。これによって、肉屑の発生を最小限に抑えることができる。
【0018】
前記検出ステップが、撮像した画像の画像情報から背骨の関節部を検出する第1ステップと、撮像した画像から背骨の輪郭の変曲点を検出する第2ステップと、前記変曲点に最も近い背骨の関節部を選定し、該関節部の位置を第3切断点とする第3ステップとからなるものであるとよい。本発明者等は、もも側最先端関節部が背骨の輪郭がカーブする変曲点の近傍にあることを見い出した。この知見を利用し、撮影した画像から検出した背骨の関節部のうち変曲点に最も近い関節部を選定することで、もも側最先端関節部を正確に検出できることがわかった。
【0019】
また、前記本発明方法の実施に直接使用可能な本発明の枝肉の分割装置は、背骨に沿って左右に2分割された家畜屠体の枝肉をもも側足首を介し懸垂する懸垂装置と、懸垂装置で懸垂された枝肉を前躯体、中躯体及び後躯体に分割する切断装置とを備えた枝肉の分割装置において、前躯体と中躯体とを分割する前中躯体分割部と、中躯体と後躯体とを分割する中後躯体分割部と、懸垂装置で懸垂された枝肉を前中躯体分割部及び中後躯体分割部を通り、かつ前中躯体分割部及び中後躯体分割部で一時停止させる搬送装置と、前中躯体分割部及び中後躯体分割部で枝肉の切断部位を教示する切断部位教示装置と、該切断部位教示装置から教示された切断部位に基づいて、切断装置の切断刃の動作を制御するコントローラとを備え、該コントローラは、頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、該第2切断点から胸骨側に向かって肋骨間を通り、肋骨先端から胸骨部位に交わる水平線と、第2切断点から背側輪郭へ向かう水平線とを前中躯体切断線とすると共に、前中躯体切断線が胸骨部位と交わる点を第1切断点とし、第1切断点から第2切断点に向かって前中躯体切断線に沿って前駆体を中躯体から切断し、背骨のもも側最先端関節部に第3切断点を設定し、寛骨を中躯体側に避けながら第3切断点を通る中後躯切断線に沿って中躯体を後躯体から切断するように制御するものである。
【0020】
本発明装置では、コントローラによって切断装置の切断刃の動作を制御し、前中躯切断線及び中後躯切断線に沿って枝肉を切断するようにしている。頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、この第2切断点から肋骨間を通る前中躯体切断線を設定することで、肋骨の切断をなくし、骨屑の発生をなくすことができる。また、滑らかな切断面を形成でき、肉屑の発生を抑え、切断後の肉部の品質低下を防止できる。
【0021】
また、中後躯体分割時に、背骨のもも側最先端関節部を第3切断点とすることで、中後躯切断線の設定が容易になると共に、寛骨の切断を回避でき、骨部の切断を最小限に抑えることができる。また、コントローラによって、前中躯切断線及び中後躯切断線を枝肉毎に設定することで、枝肉に固体差があっても、肋骨や寛骨の切断を回避でき、またギャンブレルへのつり下げ時の高さに誤差があっても、骨屑の発生を最小限に抑えることができる。そのため、切断後の肉部の品質劣化を抑えることができる。
【0022】
本発明装置の前中躯体分割部において、切断装置は、回転丸刃を備えた第1切断装置と、ナイフ状切断刃が装着された多関節アームを備えた第2切断装置とで構成され、胸骨先端部位及び背骨部位を回転丸刃で切断した後、残りの肉部を前中躯体切断線に沿ってナイフ状切断刃で切断するように構成するとよい。このように、回転丸刃の使用を骨部の切断のみとし、肉部の切断にはナイフ状切断刃を用いることで、肉部の切断面を滑らかな面とし、肉屑の発生を最小限に抑えることができる。これによって、切断後の肉部の品質劣化を抑えることができる。
【0023】
本発明装置の前中躯体分割部において、切断部位教示装置は、切断部位に向けてレーザ光を照射するレーザポインタと、該レーザポインタが装着され、レーザポインタを二次元方向任意位置に移動可能にするドラフタとで構成され、レーザ光が第1切断点及び第2切断点を照射したときのドラフタの位置情報をコントローラに入力するものであるとよい。これによって、オペレータがレーザポインタを操作し、第1切断点及び第2切断点にレーザ光を当てるだけの簡単な操作で、切断点の正確な設定が可能になる。
【0024】
本発明装置の前中躯体分割部において、切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、該撮像装置で撮像された画像を表示し、タッチパネル機能で第1切断点及び第2切断点の位置情報をコントローラに入力する表示装置とで構成されているとよい。これによって、オペレータが表示装置に表示された画像に第1切断点及び第2切断点をタッチするだけで、切断点の設定が可能になる。そのため、オペレータの作業をさらに軽減できる。
【0025】
本発明装置の前中躯体分割部において、切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、枝肉切断面の肋骨領域に青色光を照射する青色光照射灯と、枝肉切断面に白色光を照射する白色光照射灯と、前記撮像装置に設けられ、青色光以下の短波長光をカットし、緑色光以上の長波長光を該撮像装置に入光させるロングパスフィルタとを備え、コントローラは、青色光を肋骨領域に照射し、赤色から緑色の長波長光のみを入力させて撮像した画像と、白色光を枝肉切断面に照射して撮像した画像とから、肋骨領域及びカタ高さを検出する画像処理装置と、検出した肋骨領域及びカタ高さから、頭部側からN番目の肋骨を求める演算手段とを備えているとよい。
【0026】
N番目とは4番目又は5番目を指す。前記構成によって、頭部側から4番目又は5番目の肋骨を正確に検出できる。従って、4番目と5番目の肋骨間の背骨部位、又は5番目と6番目の肋骨間の背骨部位に第2切断点を位置決めできる。また、これによって、前中躯体分割部における切断工程を完全自動化できる。
【0027】
本発明装置の中後躯体分割部において、切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、該撮像装置で撮像された画像の画像情報から背骨のもも側最先端関節部を検出する画像処理装置とで構成されているとよい。このように、画像処理装置によってもも側最先端関節部を自動的に検出できるので、オペレータが手を貸す必要がなく、完全自動化できる。そのため、枝肉1頭毎の切断点の設定が容易になる。
【発明の効果】
【0028】
本発明によれば、特定の肋骨間を通る前中躯体切断線と、寛骨の切断を回避した中後躯切断線を設定できるので、肋骨の切断をなくし、骨屑の発生をなくすことができる。また、滑らかな切断面を形成でき、肉屑の発生を抑え、切断後の肉部の品質低下を防止できる。また、前中躯切断線及び中後躯切断線を枝肉毎に設定できるので、枝肉に固体差があっても、肋骨や寛骨の切断を回避でき、骨屑の発生を最小限に抑えることができる。そのため、切断後の肉部の品質劣化を抑えることができる。枝肉の大分割工程をほとんど人手によらず、機械により自動化でき、処理能力を向上できる。
【図面の簡単な説明】
【0029】
【図1】本発明を豚屠体に適用した第1実施形態に係る枝肉分割装置の全体正面図である。
【図2】前記枝肉分割装置で豚屠体の切断点を示す説明図である。
【図3】前記枝肉分割装置の制御装置のブロック線図である。
【図4】前記枝肉分割装置の前中躯体分割部の操作手順を示すフロー図である。
【図5】前記前中躯体分割部のクランプ装置を示す側面図である。
【図6】図5中のA―A矢視図である。
【図7】図5中のB―B矢視図である。
【図8】前記前中躯体分割部の切断工程を示す側面図である。
【図9】図8中のC―C矢視図である。
【図10】前記枝肉分割装置の中後躯体分割部の操作手順を示すフロー図である。
【図11】前記中後躯体分割部の画像処理工程を示すフロー図である。
【図12】前記中後躯体分割部の撮像工程を示す正面図である。
【図13】前記中後躯体分割部の撮像工程を示す側面図である。
【図14】図13中のD―D矢視図である。
【図15】図13中のE―E矢視図である。
【図16】前記中後躯体分割部の切断工程を示す側面図である。
【図17】図16中のF―F矢視図である。
【図18】前記画像処理工程で画像処理された画像を示す説明図である。
【図19】本発明の第2実施形態に係る前中躯体分割部の撮像工程を示す側面図である。
【図20】第2実施形態に係る前中躯体分割部の撮像工程を示す正面図である。
【図21】第2実施形態に係る枝肉分割装置の操作手順を示すフロー図である。
【図22】本発明の第3実施形態に係る前中躯体分割部の撮像工程を示す平面図である。
【図23】第3実施形態に係る枝肉分割装置の制御装置のブロック線図である。
【図24】第3実施形態に係る枝肉分割装置の操作手順を示すフロー図である。
【図25】第3実施形態に係る枝肉分割装置の画像処理手順を示すフロー図である。
【図26】第3実施形態で作成した枝肉切断面の合成画像を示す説明図である。
【図27】豚屠体の大分割ラインを示す説明図である。
【発明を実施するための形態】
【0030】
以下、本発明を図に示した実施形態を用いて詳細に説明する。但し、この実施形態に記載されている構成部品の寸法、材質、形状、その相対配置などは特に特定的な記載がない限り、この発明の範囲をそれのみに限定する趣旨ではない。
【0031】
(実施形態1)
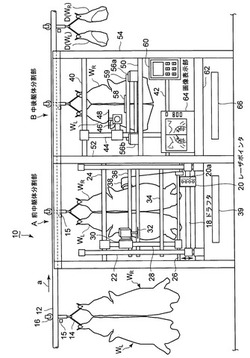
本発明を豚屠体の大分割に適用した第1実施形態を図1〜図18に基づいて説明する。図1は、本実施形態に係る枝肉分割装置10の全体構成図であり、図2は、左右一対の枝肉WR及びWLの切断線b、c、u、vを示す。図1において、枝肉分割装置10は、前中躯体分割部A及び中後躯体分割部Bが、枝肉の搬送路を形成するレール12に対して、直列に配置されている。レール12は、水平方向に配置され、前中躯体分割部A及び中後躯体分割部Bの区画内上部領域を貫通するように配置されている。一次解体処理された豚屠体は、両もも側足首を介して1個のギャンブレル14に懸垂される。その状態で背側から背骨の真ん中を左右に2分割される。
【0032】
ギャンブレル14の上端には、レール12上を滑動するトロリ16が取り付けられている。ギャンブレル14は、一定時間停止した後、プッシャ15によって一定距離ずつ矢印a方向に押されることで、ギャンブレル14が断続歩進する。これによって、左右一対の枝肉WR、WLは、まず、前中躯体分割部Aに搬送され、前中躯体分割部Aで一定時間停止して前躯体Cが分離される。分離された前躯体Cはコンベア39上に落下し搬出される。前躯体Cが分離された枝肉WR、WLは、中後躯体分割部Bに搬送され、中後躯体分割部Bで中躯体Dが分離される。分離された中躯体Dは、コンベア66上に落下し搬出される。残った後躯体Eは、そのまま後工程に搬送される。
【0033】
前中躯体分割部Aには、正面側(図1中手前側)に、レーザポインタ20を備えたドラフタ18が設けられている。ドラフタ18は垂直方向に配置されたガイドバー22上を摺動可能に支持されている。ドラフタ18にレーザポインタ20が摺動可能に装着され、レーザポインタ20は、2次元平面の任意の位置に移動可能であり、かつ枝肉WR、WLに向けてレーザ光を照射可能に構成されている。そのため、レーザポインタ20から照射されるレーザ光を、枝肉WR、WLの任意の位置に合わせることができる。
【0034】
前中躯体分割部Aの正面側に、水平方向に支持バー24及び26が設けられている。支持バー24及び26間に、垂直方向に支持バー28が架設され、支持バー28に切断装置30が取り付けられている。切断装置30は、刃面が水平方向に配置された回転丸刃32を備え、回転丸刃32はエアシリンダ30a(図8参照)によって枝肉WR、WLに対し進退可能になっている。切断装置30は支持バー28上を摺動可能であり、支持バー28は支持バー24及び26上を摺動可能であり、そのため、回転丸刃32を枝肉WR、WLの任意の位置に配置可能になっている。
【0035】
前中躯体分割部Aの背面側(図1中奥側)に、6軸多関節アーム38が設けられている。図8に示すように、6軸多関節アーム38は先端に分割ナイフ38aが装着され、分割ナイフ38aを任意の向きにかつ任意の位置に動作できる。そのため、枝肉の所望部位を所望方向に切断可能になっている。
【0036】
また、切断装置30で前躯体Cを切断するとき、枝肉WR、WLを押えて固定するクランプ装置が設けられている。図5に示すように、該クランプ装置は、枝肉搬送路の正面側に設けられた前躯クランプ34及び中躯クランプ36と、枝肉搬送路の背面側に前躯クランプ34とほぼ同一高さに設けられた前躯クランプ35、及び中躯クランプ36とほぼ同一高さに設けられた中躯クランプ37とで構成されている。
【0037】
中後躯体分割部Bには、枝肉搬送路の正面側に、水平方向に支持バー40及び42が設けられ、支持バー40及び42間に支持バー44が架設されている。そして、支持バー44に切断装置46が取り付けられている。切断装置46は、刃面が水平方向に配置された回転丸刃48を備え、回転丸刃48はエアシリンダ46a(図17参照)によって枝肉WR、WLに対し進退可能になっている。切断装置46は支持バー44上を摺動可能であり、支持バー44は支持バー40及び42上を摺動可能に構成されている。そのため、回転丸刃48を枝肉WR、WLの任意の位置に配置可能になっている。
【0038】
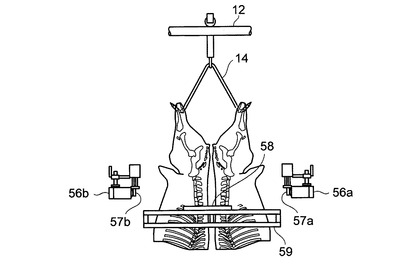
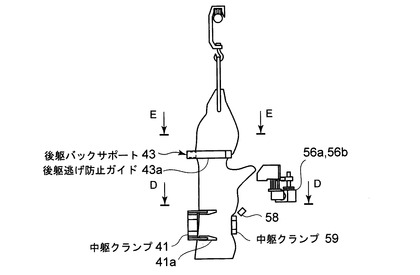
中後躯体分割部Bには、支持バー50が水平方向に配置され、両側のフレーム52及び54間に架設されている。支持バー50の中央部に撮影用ライト58が取り付けられ、撮影用ランプ58の両側にCCDカメラ56a及び56bが取り付けられている。支持バー42及び54には操作盤60が設けられ、下部フレーム62には、CCDカメラ56a、56bで撮影され、画像処理された後の画像を表示し、タッチパネル機能を有する画像表示部64が設けられている。また、枝肉WR、WLを固定するクランプ装置として、枝肉搬送路の正面側に中躯クランプ59が設けられ、枝肉搬送路の背面側に、中躯クランプ41及び後躯バックサポート43(図13〜図17参照)が設けられている。
【0039】
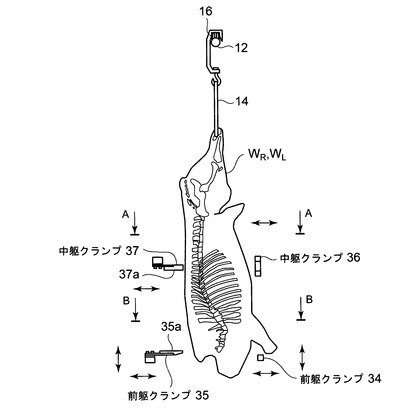
図2は、枝肉WR、WLの骨格と、枝肉を前躯体C、中躯体D及び後躯体Eに大分割する左前中躯切断線b、左中後躯切断線c、右前中躯切断線u及び右中後躯切断線vを示す。豚屠体の骨格は、背骨s、肋骨r、棘突起m、寛骨j及び胸骨k等からなる。前中躯体分割部Aで、前躯体Cと中躯体Dとを分離する左前中躯切断線bは、枝肉WLの胸骨kに位置する左第1切断点dと、左第1切断点dの横方向で左第1切断点dの高さに対し上下に存在する肋骨r間(第4肋骨と第5肋骨間又は第5肋骨と第6肋骨間)の背骨sの左第2切断点eとを通る。右前中躯切断線uは、枝肉WRの背骨sの右第2切断点f(胸骨kに位置する右第1切断点gの横方向で右第1切断点gの高さに対し上下に存在する肋骨r間切断点)と、右第1切断点gとを通る。
【0040】
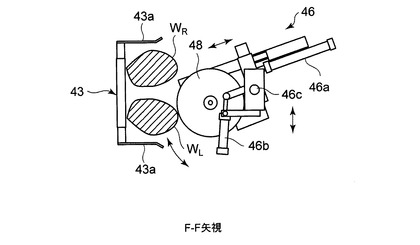
また、中後躯体分割部Bで、中躯体Dと後躯体Eとを分離する左中後躯切断線cは、背骨sのもも側最先端関節部の左第3切断点hを通り、右中後躯切断線vは右第3切断点iを通る。中躯体Dと後躯体Eとを分離するとき、回転丸刃48を正面側から背面側に向って斜め下方に進入させ、寛骨jの切断を回避している(図16参照)。
【0041】
図3は、枝肉分割装置10の制御装置を示す。図3において、コントローラ70は、CPU72と、画像処理装置76と、画像表示部64と、画像メモリ74とで構成されている。プッシャ15、前記クランプ装置の駆動装置及びCCDカメラ56a、56b、撮影用ライト58の動作をCPU72で制御する。また、レーザポインタ20で得られた切断点d、e、f及びgの位置情報、及びCCDカメラ56a、56bで撮影され、画像処理装置76で画像処理された画像がCPU72に入力され、画像メモリ74に記憶される。該画像は画像表示部64に表示される。CPU72は、切断点d、e、f及びgの位置情報及び画像処理された画像情報から得られる切断点h及びiの位置情報に基づいて、切断装置30及び46の動作を制御する。
【0042】
次に、前中躯体分割部Aで前躯体Cを切断する切断工程を説明する。図4にコントローラ70による操作手順を示す。1個のギャンブレル14に懸垂された左右一対の枝肉WR及びWLが前中躯体分割部Aに搬入され停止する(S10)。図5〜図7に示すように、正面側の前躯クランプ34及び中躯クランプ36と、背面側の前躯クランプ35及び中躯クランプ37が枝肉側に接近し、両側から枝肉WR、WLを押え固定する(S12)。前躯クランプ34及び35は、枝肉の両側から前躯体Cを押える。中躯クランプ36及び37は、枝肉の両側から中躯体Dを押える。
【0043】
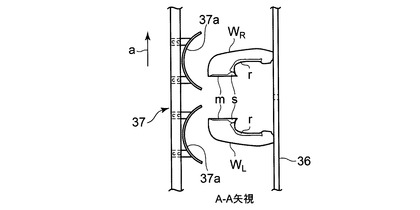
これらのクランプは枝肉搬送路に対して進退可能に構成され、かつ前躯クランプ34及び35は上下方向に移動可能になっている。前躯クランプ34は1本のバーが水平方向に配置され、中躯クランプ36は2本のバーが水平方向に配置されている。図6に示すように、前躯クランプ37は、枝肉の搬送方向に2個の円弧状の押え板37aを備え、押え板37aで枝肉を囲むようにする。図7に示すように、前躯クランプ35は、押え板37aより曲率半径が大きい2個の円弧状押え板35aを備えている。
【0044】
次に、オペレータがドラフタ18を操作し、レーザポインタ20で切断点d、e、f及びgの順にレーザ光を当てる。各切断点にレーザ光を当てるたびに、各切断点専用の押しボタン20aを押すことで、各切断点の位置情報をコントローラ70に送信する(S14)。
【0045】
図8に示すように、枝肉搬送路の正面側に設けられた切断装置30は、エアシリンダ30aにより枝肉に対して進退可能に構成されている。枝肉搬送路の背面側に設けられた6軸多関節アーム38は、先端に分割ナイフ38aが装着され、コントローラ70によって、分割ナイフ38aを任意位置に移動可能であると共に、分割ナイフ38aの向きを任意方向に向けることができる。
【0046】
前記切断点の位置情報に基づいて、コントローラ70によって、切断装置30の回転丸刃32を切断点d、e、f及びgの順に移動させ、胸骨先端部位及び背骨部位を切断する(S16)。このときの回転丸刃32の移動軌跡を図9中のラインlで示す。即ち、回転丸刃32は、胸骨部位又は背骨部位を切断した後、一旦後退し、その後枝肉の搬送方向(矢印a方向)に移動し、次の切断位置で枝肉に向かって進む移動軌跡を辿る。
【0047】
次に、コントローラ70によって6軸多関節アーム38を動作させ、左前中躯切断線bに沿い切断点d、e、f及びgの順に移動させ、枝肉WR、WLの肉部を切断する(S18)。この2段階の切断動作で、枝肉WR、WLの前躯体Cを中躯体Dから分離させる。分離された前躯体Cは、コンベア39上に落下し、コンベア39で搬送される。次に、クランプ34〜37が枝肉から離れ(S20)、その後、プッシャ15によってギャンブレル14が矢印a方向に押され、枝肉WR、WLは中後躯体分割部Bに移動する(S22)。
【0048】
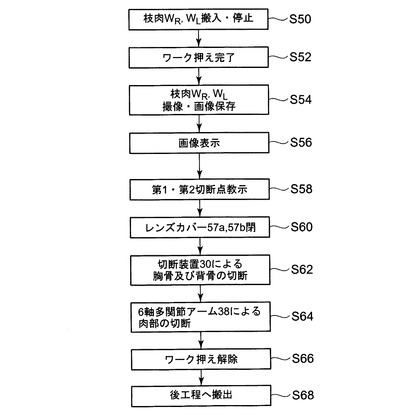
図10に中後躯体分割部Bでのコントローラ70による操作手順を示し、図11に画像処理ステップ(S38)の操作手順を示す。中後躯体分割部Bに移動した枝肉はそこで一時停止する(S30)。図12〜図15に示すように、中後躯体分割部Bには、正面側に中躯体Dを押える中躯クランプ59が設けられ、背面側に中躯体Dを押える中躯クランプ41及び後躯体Eを押える後躯バックサポート43が設けられている。枝肉WR、WLが停止すると、前記クランプ59、41及び43が両側から枝肉に近づき、枝肉をクランプする(S32)。
【0049】
正面側中躯クランプ59は、水平方向に配置された2本のバーからなる。背面側中躯クランプ41は、枝肉を背面側から押える2個の円弧状の押え板41aを備えている。後躯バックサポート43は、水平方向に配置されたサポートバーの両端に、枝肉側に突出する後躯逃げ防止ガイド43a及び43bが取り付けられ、枝肉WR、WLを両側から囲うようにしている。これによって、後躯体Eの脱落を防止している。
【0050】
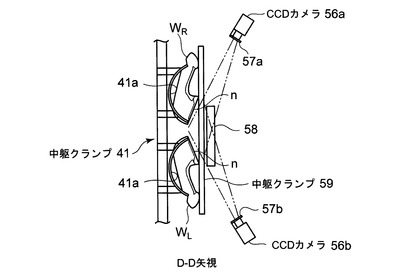
次に、撮影用ライト58及びCCDカメラ56a、56bを所定位置に配置し、撮影用ライト58で枝肉WR、WLを照射すると共に、CCDカメラ56a、56bで枝肉の切断面nをWLからWRの順に撮影する。撮像した画像は画像メモリ74に保存される(S34・S36)。枝肉の切断面nは、クランプ装置で固定された状態で、正面に対し斜めに配置される。そのため、CCDカメラ56a、56bは、レンズが両枝肉の切断面nに正対するように、枝肉WR、WLの両側に配置され、レンズは夫々枝肉WR、WLの切断面nに向けられている。CCDカメラ56a、56bには、肉片付着防止用カバー57a、57bが設けられ、撮影時以外は、レンズに肉片が付着しないように、該肉片付着防止用カバーを閉じた状態としておく。
【0051】
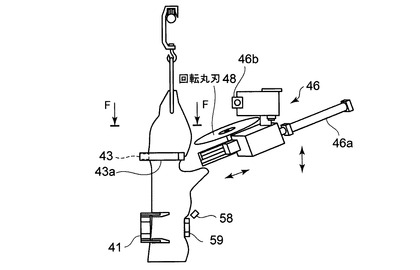
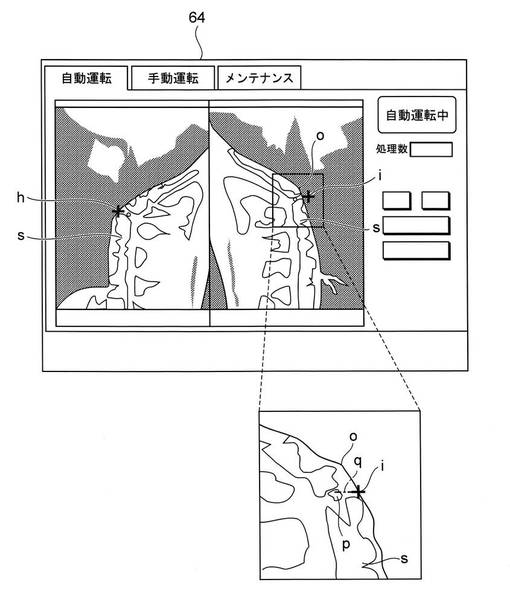
CCDカメラ56a、56bで撮影した画像は、画像処理装置76で画像処理され(S38)、画像処理後の画像はCPU72に送られ、画像メモリ74に記憶されると共に、画像表示部64に表示される(S40)。この画像により左第3切断点h及び右第3切断点iを検出し、CCDカメラ56a、56bのレンズカバー57a、57bを閉じた後(S42)、左第3切断点hを通る左中後躯切断線c及び右第3切断点iを通る右中後躯切断線vに沿って、中躯体Dを切断する(S44)。図16及び図17は、切断装置46の回転丸刃48で中躯体Dを切断する状態を示す。
【0052】
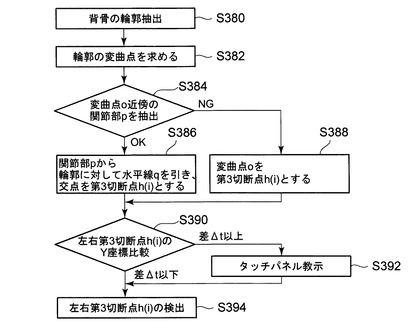
以下、図11により、画像処理ステップ(S38)の処理手順を説明する。図18に画像処理され、画像表示部64に表示された切断面nの処理画面を示す。画像上で確実に背骨sの輪郭を得るために、背骨sの輪郭に段差があることを利用し、枝肉の下方から撮影用ライト58によって白色光を照射し、背骨sの輪郭に影ができるようにした。撮影用ライト58として、指向性が強く、反応性が良いLED照明を使用し、これを可能にした。次に、画像のR―G―B成分毎の平均輝度差等を求め、背骨sの輪郭を抽出すると共に(S380)、背骨sの輪郭の変曲点oを求めた(S382)。
【0053】
次に、同様の手法で変曲点o近傍の関節部pの抽出を行う(S384)。該関節部pを抽出できたときは、関節部pから輪郭に対して水平線qを引き、水平線qと輪郭との交点を切断点h(i)とした(S386)。関節部pを抽出できなかったときは、変曲点oを切断点h(i)とした(S388)。こうして求めた左右枝肉WR、WLの切断点i及びhの二次元座標のうち垂直方向座標(Y座標)を比較し(S390)、その差Δtが閾値以下であるとき、切断点h(i)を正しいと判定する(S394)。差Δtが閾値を超えたとき、切断点h(i)は誤りと判定し、タッチパネル教示に切り替える。即ち、オペレータが画像表示部64に表示された画像に切断点を示し、切断点h(i)を教示する(S392)。この教示情報に基づいて、切断装置46が動作し、中躯体Dを切断する。
【0054】
図16及び図17において、切断装置46はエアシリンダ46aによって枝肉搬送路に対し進退自在に構成されている。このとき、切断装置46の回転丸刃48は、寛骨jの切断を避けるため、正面側から背面側に向かって斜め下方に進入するように構成されている。また、回転丸刃48はエアシリンダ46bによって回動軸46cを中心に回動可能に構成されている。かかる構成によって、回転丸刃48は、枝肉WLの中躯体Dを切断した後、一旦後退し、次に、枝肉WR側に向きを変え、枝肉WRに近づいて枝肉WRの中躯体Dを切断した後、後退する動作を行なうことができる。
【0055】
図10において、画像処理(S48)の後、画像表示部64に、画像処理された画像及び第3切断点h(i)の座標が表示される(S40)。次に、CCDカメラ56a、56bのレンズカバー57a、57bが閉じられ(S42)、切断装置46が動作し、切断線cに沿って中躯体Dを切断する(S44)。次に、クランプ装置が動作し、後躯体Eの固定を解除する(S46)。次に、中後躯体分割部Bから、枝肉WR、WLの後躯体Eが後工程に搬出される(S48)。
【0056】
本実施形態によれば、前中躯体分割部Aでは、胸骨部位の左右第1切断点d、g及び該左右第1切断点の横方向で該左右第1切断点の上下に存在する肋骨rの間に位置する背骨部位の左右第2切断点e、fを切断点に設定し、中後躯体分割部Bでは、背骨sのもも側最先端関節部の左右第3切断点h、iを切断点とすることで、切断点の認知と設定が容易になる。また、これらの切断点を通る左前中躯切断線b、左中後躯切断線c、右前中躯切断線u及び右中後躯切断線vに沿って枝肉を切断することで、肋骨r及び寛骨jの切断を回避でき、骨屑の発生を最小限にすることができる。そのため、切断後の肉部の品質劣化を抑えることができる。
【0057】
さらには、枝肉1頭毎に左右第1切断点b、g、左右第2切断点e、f及び左右第3切断点h、iを検出し直しているので、枝肉の大きさや形状に固体差があっても、またギャンブレルへの吊り下げ時の高さ方向に誤差があっても、切断精度を高く維持でき、肋骨rや寛骨jを切断するおそれはない。このことは、同一ギャンブレル14で同時に切断処理される左右枝肉間の固体差や吊り下げ高さ誤差に対しても、同様である。
【0058】
また、前中躯体分割部Aで、回転丸刃32の使用を胸骨先端部位や背骨部位のみとし、肉部の切断に分割ナイフ38aを用いたことで、肉部で滑らかな切断面を形成でき、肉屑や骨屑の発生を最小限に抑えることができる。これによって、切断後の肉部の劣化を抑えることができる。また、前中躯体分割部Aで、オペレータがドラフタ18に設けられたレーザポインタ20を操作するだけの簡単な操作で、切断点d、e、f及びgの位置決めを可能にする。
【0059】
また、中後躯体分割部Bでは、画像処理装置76で左右第3切断点h、iを自動的に検出できるので、オペレータの手を借りることなく、左右第3切断点h、iの検出を完全自動化できる。この画像処理ステップは、背骨sの輪郭を抽出すると共に、背骨sの輪郭の変曲点oを求め、変曲点oに最も近い関節部を選定し、さらに、左右枝肉WR、WLの切断点i及びhの垂直方向座標(Y座標)を比較し、その差Δtが閾値以下であるとき、切断点h、iを正しいと判定しているので、左右第3切断点h、iを正確に検出できる。また、画像処理により、左右第3切断点h、iを検出できなかったときは、オペレータが画像表示部64に表示された画像に左右第3切断点h、iを教示するようにしているので、切断動作を中断するおそれがない。
【0060】
また、枝肉の切断面nは、クランプ装置で固定された状態で、正面に対し斜めに配置される。これに対し、中後躯体分割部Bでは、CCDカメラ56a、56bのレンズが両枝肉の切断面nに正対するように、枝肉WR、WLの両側に配置し、レンズを夫々枝肉WR、WLの切断面nに向けているので、切断面nを明瞭に撮影できる。また、中後躯体分割部Bで、背骨の輪郭に段差があることを利用し、枝肉の下方から撮影用ランプ58によって白色光を照射し、背骨sの輪郭に影ができるように撮影すると共に、撮影用ランプ58として、指向性が強く、反応性が良いLED照明を使用したので、画像上で確実に背骨sの輪郭を得ることができた。
【0061】
(実施形態2)
次に、本発明方法及び装置の第2実施形態を図19〜図21に基づいて説明する。本実施形態は、第1実施形態と同様に豚屠体の大分割工程に適用したものである。図19及び図20は本実施形態の前中躯体分割部Aを示す。本実施形態は、ドラフタ18及びレーザポインタ20の代わりに、CCDカメラ80、撮影用ライト82及びタッチパネル式の画像表示部84を備えている。CCDカメラ80及び撮影用ライト82は、前躯体Cと同一の高さで枝肉WR、WLの中央に配置されている。前中躯体分割部Aのその他の構成は、第1実施形態と同一であり、中後躯体分割部Bの構成は第1実施形態と同一である。
【0062】
図21により、前中躯体分割部Aの制御手順を説明する。枝肉WR、WLが前中躯体分割部Aに搬入され停止する(S50)。次に、クランプ装置により枝肉WR、WLを固定する(S52)。次に、CCDカメラ80で枝肉WR、WLの切断面を撮影し、撮影した画像は画像メモリ74に保存すると共に(S54)、画像表示部84に表示される(S56)。画像表示部84に表示された画像に対し、オペレータが切断点d、e、f及びgをタッチし、切断点d、e、f及びgの位置情報がコントローラ70に入力される(S58)。
【0063】
次に、CCDカメラ80のレンズカバー57a、57bが閉じられ(S60)、その後の切断工程は、図4に示す第1実施形態と同一である。前躯体Cを分離した後、クランプ装置の固定が解除され(S66)、枝肉WR、WLの後躯体Eが後工程へ搬出される(S68)。本実施形態によれば、切断点d、e、f及びgの検出をタッチパネル式としたことで、第1実施形態よりオペレータの労力を軽減できる。
【0064】
(実施形態3)
次に、本発明の第3実施形態を図22〜図26に基づいて説明する。図22は前中躯体分割部Aを示す。前中躯体分割部Aでクランプ等で固定された枝肉WR、WLに対面する位置にCCDカメラ90が設けられている。CCDカメラ90の前面にロングパスフィルタ92が設けられ、かつロングパスフィルタ92をCCDカメラ90から着脱可能にする着脱シリンダ92aが設けられている。また、CCDカメラ90の近くに白色光を照射する一対の白色照明ライト(LED照明)94a及び94bが設けられている。白色照明ライト94a及び94bは互いに交差する方向に向けられている。即ち、白色照明ライト94aは枝肉WRの切断面nを照射するように枝肉WRに向けられ、照明ライト94bは枝肉WLの切断面nを照射するように枝肉WLに向けられている。
【0065】
また、枝肉WR、WLに対面する位置に青色光を照射する一対の青色照明ライト(LED照明)96a及び96bが設けられている。青色照明ライト96aが枝肉WRの切断面nを照射し、青色照明ライト96bが枝肉WLの切断面nを照射する。
【0066】
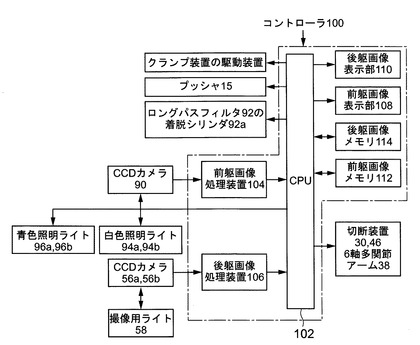
図23に本実施形態の制御系を示す。コントローラ100は、CPU102と、前中躯体分割部Aに設けられたCCDカメラ90で撮像した画像が入力され、該画像を加工する前駆画像処理装置104と、前駆画像処理装置104で加工された画像及び第1切断点d(g)、第2切断点e(f)等が表示される前駆画像表示部108と、これらが記憶される前駆画像メモリ112と、中後躯体分割部Bでの切断工程に用いられる後躯画像処理装置106、後躯画像表示部110及び後躯画像メモリ114とを備えている。後躯画像処理装置106は図3の画像処理装置76と同一構成を有し、後躯画像表示部110は図3の画像表示部64と同一構成を有し、後躯画像メモリ114は図3の画像メモリ74と同一構成を有している。コントローラ100は、前記クランプ装置の駆動装置やプッシャ15の駆動を制御するほか、ロングパスフィルタ92の着脱シリンダ92aの駆動を制御する。
【0067】
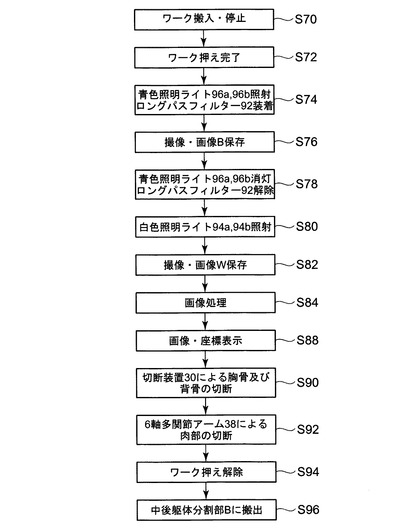
次に、図24〜図26により本実施形態の切断工程を説明する。図24において、左右一対の枝肉WR、WLが前中躯体分割部Aに搬入され停止する(S70)。枝肉WR、WLが停止したら、正面側の前駆クランプ34、中駆クランプ36及び背面側の前駆クランプ35、中駆クランプ37で両側から枝肉WR、WLを押え固定する(S72)。次に、青色照明ライト96a及び96bで,波長が470nmの青色光を枝肉WR、WLの肋骨領域に照射すると共に、495nm以下の波長光をカットするロングパスフィルタ92をCCDカメラ90に装着する(S74)。
【0068】
青色光を肋骨領域に照射することで、各肋骨の周囲にある脂肪や肉の部分を励起発光させることができる。この状態の肋骨領域をロングパスフィルタ92を通してCCDカメラ90で撮像する。ロングパスフィルタ92から緑色から赤色の長波長光のみが透過し、CCDカメラ90で撮像した画像は肋骨領域が緑色に着色された画像となる。この画像Bを前駆画像メモリ112に保存する(S76)。次に、青色照明ライト96a、96bを消し、ロングパスフィルタ92をCCDカメラ90から外し(S78)、白色照明ライト94a及び94bを枝肉WR、WLの切断面nに照射する(S80)。この状態で切断面nをCCDカメラ90で撮像し、撮像した画像Wを前駆画像メモリ112に保存する(S82)。
【0069】
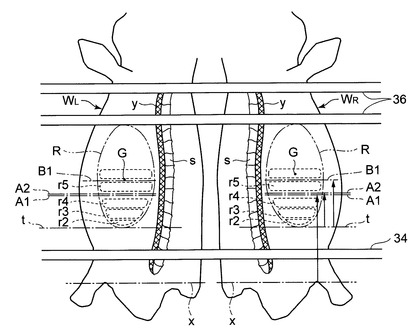
次に、前駆画像メモリ108に保存した画像B及び画像Wの処理工程(S84)を図25で説明する。図26は、画像Bと画像Wとを合成した合成画像を示している。合成画像は、肋骨領域Rを画像Bから取り、その他の領域は画像Wから取って合成したものである。肋骨領域Rは緑色に着色されている。また、白色照明ライト94aから枝肉WRに白色光を斜めに照射し、白色照明ライト94bから枝肉WLに斜めに照射しているので、背骨sの輪郭に沿って影yを形成し、これによって、背骨sの輪郭を鮮明に浮き出している。
【0070】
画像処理工程84は、頭部側から4番目の肋骨を検出するための処理工程であり、この手順を図25により説明する。図25において、画像Wから枝肉WR、WLの背骨と、カタ(肩)の外形ラインxの位置を検出すると共に(S840)、画像Bから肋骨領域Rの下端tの位置を検出する(S842)。さらに、合成画像で肋骨領域Rを抽出する(S844)。
【0071】
合成画像に表される肋骨領域Rで認識できる一番下の肋骨は、頭部側から2番目の肋骨であることが多い。そのため、肋骨領域Rの一番下の肋骨r2は頭部側から2番目の肋骨であると仮設定する(S846)。次に、肋骨r2から2つ上の肋骨を4番目の肋骨r4として検出する(S848)。ここで、3つの閾値を設定する。1つの閾値A1は、肋骨領域下端tを基準とし、下から3本目の肋骨r3と下から4本目の肋骨r4との境界を示す閾値である。2つ目の閾値A2は、カタ外形ラインxを基準とし、下から3本目の肋骨r3と4本目の肋骨r4との境界を示す閾値である。3つ目の閾値B1は、肋骨領域下端tを基準とし、4本目の肋骨r4と5本目の肋骨r5との境界を示す閾値である。閾値A1及び閾値B1は、過去の測定で収集した肋骨領域下端tの測定値に基づいて、肋骨領域下端tを独立変数とする一次関数から求めている。閾値A2は、過去の測定で収集したカタ外形ラインxの測定値からカタ外形ラインxを独立変数とする一次関数から求めている。
【0072】
次に、肋骨r4と閾値A1及びA2との高さを比較し(S850)、肋骨r4が閾値A1及び閾値A2より下にあるとき、肋骨r4の1本上の肋骨を4本目の肋骨とみなす(S852)。肋骨r4が閾値A1と閾値A2との間にあるとき、肋骨r4と閾値A1及び閾値A2の中間の閾値Am(=(A1+A2)/2)と比較し(S853)、肋骨r4が閾値Amより下にあるとき、肋骨r4の1本上の肋骨を4本目の肋骨とみなす(S854)。
【0073】
さらに、肋骨r4と閾値B1の高さを比較し(S856)、肋骨r4が閾値B1より上にあるとき、肋骨r4より1本上の肋骨を4本目とみなす(S858)。次に、枝肉WR、WLの肋骨重心Gの高さ位置と閾値A1の高さ位置を比較する(S860)。肋骨重心Gとは、肋骨領域Rの中心であり、枝肉WR、WLのうち肋骨重心Gと閾値A1との高さ方向の距離が近いほうの枝肉の肋骨の検出結果を正とする(S862)。こうして、下から4本目と認定した肋骨の上辺先端から伸ばした水平線が胸骨kと交わる点を第1切断点d、gとする(S864)。また、4本目と認定された肋骨の上辺と背骨sとが交わる点を第2切断点e、fとする(S866)。こうして検出した第1切断点d、g及び第2切断点e、fの座標を6軸多関節アーム38に送る(S868)。
【0074】
次に、図24に戻り、画像B、W、合成画像C及び第1切断点d、g、第2切断点e、fの座標を前駆画像表示部106に表示する(S88)。そして、切断装置30により、胸骨部位及び背骨部位の切断を行い(S90)、さらに、6軸多関節アーム38による肉部の切断を行い、枝肉WR、WLから前駆体Cを切断する(S92)。その後、クランプ34〜37によるワーク押えを解除し(S94)、枝肉WR、WLを中後躯体分割部Bに搬出する(S96)。
【0075】
本実施形態によれば、枝肉WR、WLの肋骨領域に青色光を照射し、肋骨周囲の脂肪や肉部を励起発光させることで、肋骨領域Rを鮮明に撮像できると共に、白色光を照射して枝肉の外形や背骨sの輪郭を鮮明に撮像できる。これらの画像から検出した肋骨領域下端t及びカタ外形ラインxを基準とし、過去に収集した測定値から、これら基準との距離を設定した閾値A1、A2及びB1を用いて、頭部側から4番目の肋骨を正確に検出できる。こうして検出した肋骨を基点として、第1切断点d、g、第2切断点e、fや前中躯体切断線b、uを設定するので、肋骨rの切断を回避でき、骨屑の発生をなくすことができる。そのため、切断後の肉部の品質低下を防止できる。
【0076】
また、白色照明ライト94a及び94bから照明する白色光を、夫々枝肉WR、WLの切断面nに対して斜めに当てているので、背骨sの輪郭に影yを形成できる。そのため、背骨sの輪郭を鮮明に画像上に表すことができ、背骨sの輪郭を基点として肋骨位置を正確に検出することもできる。また、各枝肉毎に前記手順で肋骨r4の検出を行うので、枝肉の固定差による後検出をなくすことができる。さらに、本実施形態によって、前中躯体切断線b、uを設定することで、前中躯体分割部Aでの切断ラインの設定を含めた脱骨処理を完全自動化できる。
【産業上の利用可能性】
【0077】
本発明によれば、枝肉の大分割工程で、骨部の切断を最小限に低減し、骨屑の発生を低減でき、切断後の肉部の品質劣化を抑えることができると共に、枝肉の固体差に応じた切断が可能になる。
【符号の説明】
【0078】
10 枝肉分割装置
12 レール
14 ギャンブレル
15 プッシャ
16 トロリ
18 ドラフタ
20 レーザポインタ
20a 押しボタン
22 ガイトバー
24,26,28,40,42,44,50 支持バー
30,46 切断装置
30a,46a,46b エアシリンダ
32,48 回転丸刃
34,35 前躯クランプ
35a,37a,41a 押え板
36,37,41,59 中躯クランプ
38 6軸多関節アーム
38a 分割ナイフ
39,66 コンベア
43 後躯バックサポート
46c 回動軸
52,54 フレーム
56a,56b,80、90 CCDカメラ
58,82 撮影用ライト
57a、57b レンズカバー
60 操作盤
62 下部フレーム
64,84 画像表示部
70,100 コントローラ
72,102 CPU
74 画像メモリ
76 画像処理装置
92 ロングパスフィルタ
92a 着脱シリンダ
94a、94b 白色照明ライト
96a、96b 青色照明ライト
104 前駆画像処理装置
106 後躯画像処理装置
108 前駆画像表示部
110 後躯画像表示部
112 前駆画像メモリ
114 後躯画像メモリ
A 前中躯体分割部
A1、A2、B1 閾値
B 中後躯体分割部
C 前躯体
D 中躯体
G 肋骨重心
E 後躯体
R 肋骨領域
WR,WL 枝肉
a 搬送方向
b 左前中躯切断線
c 左中後躯切断線
d 左第1切断点
g 右第1切断点
e 左第2切断点
f 右第2切断点
h 左第3切断点
i 右第3切断点
j 寛骨
k 胸骨
m 棘突起
o 変曲点
p 背骨関節部
q 直線
r 肋骨
s 背骨
t 肋骨領域下端
u 右前中躯切断線
v 右中後躯切断線
x カタ外形ライン
y 影
【技術分野】
【0001】
本発明は、牛、豚、羊等の家畜屠体を背骨に沿って左右に2分割した枝肉を、前躯体、中躯体及び後躯体に3分割する方法及び装置に関する。
【背景技術】
【0002】
図27は豚屠体の大分割ラインを示す説明図である。牛、豚、羊等、家畜屠体の解体は、まず、温熱雰囲気で頭部、前足首イ1及び後足首ハ1の切断、内蔵摘出等の一次解体処理を行なう。次に、家畜屠体をギャンブレル(股鉤)にもも側足首を介して懸垂し、背側から背骨の真ん中を左右に2分割する。その後、うで・かた部イ(前躯体)、ロース・ばら部ロ(中躯体)及びもも部ハ(後躯体)に大分割する。
【0003】
大分割工程では、機械による自動化技術が開発されてきているが、丸刃やバンドソーを用いた分割を行なうのが主流である。しかし、これらの切断装置を用いた方法では、骨の位置や屠体の形状に応じて、切断位置を調整できないため、前躯体と中躯体の分割の際に、肋骨の切断を回避することが困難であった。また、オペレータが手作業で行なう場合、安全性に問題がある。さらに、家畜屠体の固体差に応じた切断動作ができず、骨を不必要に切断し、骨屑を発生させ、また滑らかな切断面を形成できないという問題がある。また、丸刃を用いた場合、肉屑や骨屑が発生し、切断後の肉部の品質低下が起こる。
【0004】
特許文献1には、特殊な形状をした切断刃を装備した枝肉分割装置が開示されている。この切断刃は回転軸に取り付けられ、刃体が刃先から外周側及び内周側に広がる楔形をなし、外周側に第1の切刃が形成され、内周側に第2の切刃が形成されている。そして、もも側足首を介して懸垂された枝肉に対し、切断刃を水平面内で回転させ、第1の切刃で肉部を切断し、第2の切刃で骨部を切断するようにしている。また、円筒カムが切断刃の回転軸の周囲に設けられ、切断刃と一体のカムフォロワが、該円筒カムの高低差を設けた上面に当接し、家畜屠体の肋骨の湾曲状態に応じて、切断刃が肋骨間隙間を通るように、切断刃を上下動させる構成としている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平2−31639号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
枝肉の大きさ、形状には固体差がある。特許文献1に開示された装置で、この固体差に応じて切断線の位置を調整するためには、枝肉1頭毎に形状の異なる円筒カムに交換する必要がある。このような作業は、大分割工程の作業効率を極端に低下させるので、事実上困難である。そのため、切断刃で枝肉の肋骨を切断することになり、骨屑が発生して切断後の肉部の品質低下が起こるという問題が依然として残る。
【0007】
本発明は、かかる従来技術の課題に鑑み、枝肉の大分割工程で、枝肉の固体差に対応して肋骨等骨部の切断を回避し、かつ回転丸刃やバンドソー等の使用を極力なくし、滑らかな切断面を形成することにより、骨屑及び肉屑の発生を抑え、切断後の肉部の品質低下を防止することを目的とする。
【課題を解決するための手段】
【0008】
かかる目的を達成するため、本発明の枝肉の分割方法は、背骨に沿って左右に2分割された家畜屠体の枝肉をもも側足首を介し懸垂装置で懸垂した状態で前躯体、中躯体及び後躯体に分割する枝肉の分割方法において、頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、第2切断点から胸骨側に向かって肋骨間を通り、肋骨先端から胸骨部位に交わる水平線と、第2切断点から背側輪郭へ向かう水平線とを前中躯体切断線とすると共に、前中躯体切断線が胸骨部位と交わる点を第1切断点とし、第1切断点から第2切断点に向かって前中躯体切断線に沿って前駆体を中躯体から切断する前中躯体分割工程と、背骨のもも側最先端関節部に第3切断点を設定し、寛骨を中躯体側に避けながら第3切断点を通る中後躯切断線に沿って中躯体を後躯体から切断する中後躯体分割工程とからなるものである。
【0009】
前中躯体分割工程では、頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、この第2切断点から肋骨間を通る前中躯体切断線を設定することで、肋骨の切断をなくし、骨屑の発生をなくすことができる。また、滑らかな切断面を形成でき、肉屑の発生を抑え、切断後の肉部の品質低下を防止できる。
【0010】
また、中後躯体分割時に、背骨のもも側最先端関節部を第3切断点とすることで、切断点の特定が容易になる。また、第3切断点を通る中後躯切断線を設定することで、寛骨の切断を回避でき、骨部の切断を最小限に抑えることができる。また、前中躯切断線及び中後躯切断線を枝肉毎に位置決めすることで、枝肉に固体差があっても、またギャンブレルへの吊り下げ時の高さに誤差があっても、肋骨や寛骨の切断を回避でき、骨屑の発生を最小限に抑えることができる。そのため、切断後の肉部の品質劣化を抑えることができる。
【0011】
本発明方法において、前中躯体分割工程が、胸骨部位及び背骨部位を回転丸刃で切断する第1切断ステップと、第1切断ステップの後で、多関節アームに装着されたナイフ状切断刃によって前中躯切断線に沿い残りの肉部を切断する第2切断ステップとからなるものであるとよい。このように、回転丸刃を骨部の切断のみに用い、肉部の切断にはナイフ状切断刃を用いることで、肉部の切断面を滑らかな面とし、肉屑の発生を最小限に抑えることができる。これによって、切断後の肉部の品質劣化を抑えることができる。
【0012】
前中躯体分割工程において、青色の可視光線(以下「青色光」と言う。)を枝肉切断面に照射して肋骨領域を励起発光させ、青色以下の短波長の可視光線をカットし、赤色から緑色の長波長の可視光線(以下「長波長光」と言う。)のみを撮像装置に入光させ、肋骨領域を該撮像装置で撮像する第1撮像ステップと、特定波長の可視光線を除かない白色可視光線(以下「白色光」と言う。)を枝肉切断面に照射して枝肉切断面を撮像装置で撮像する第2撮像ステップと、第1撮像ステップ及び第2撮像ステップで撮像した画像から、肋骨領域及びカタ高さを検出する枝肉検出ステップと、肋骨領域の最も下に位置する肋骨を頭部側から2番目の肋骨と仮設定し、該2番目の肋骨からN番目の肋骨を検出する仮設定ステップと、過去の計測値から、肋骨領域の下端を基準とし、(N−1)番目の肋骨とN番目の肋骨の境界を示す第1の閾値と、カタの高さを基準とし、(N−1)番目の肋骨とN番目の肋骨の境界を示す第2の閾値と、肋骨領域の下端を基準にし、N番目の肋骨と(N+1)番目の肋骨との境界を示す第3の閾値とを求める閾値設定ステップと、仮設定ステップで検出したN番目の肋骨が、第1の閾値及び第2の閾値の平均値より下方に位置するとき、該N番目の肋骨の直上の肋骨をN番目の肋骨とみなす第1修正ステップと、仮設定ステップで検出したN番目の肋骨が、第3の閾値より上方に位置するとき、該N番目の肋骨の直下の肋骨をN番目の肋骨とする第2修正ステップと、左右に2分割された枝肉の肋骨領域の中心と第1の閾値との高さの差を比較し、この差が小さい方の枝肉で得られた肋骨の検出結果を採用する選択ステップとを行うとよい。
【0013】
可視光線は、波長が異なる赤(波長620〜780nm)、橙色(同590〜620nm)、黄色(同570〜590nm)、緑(同495〜570nm)、青(同450〜495nm)及び紫(同380〜450nm)の可視光線で構成されている。第1撮像ステップにおいて、450nm〜495nmの波長を有する青色の可視光線を用いる。また、撮像においては、495nmを上限とし、この波長以下の短波長の可視光線及び紫外線をカットした赤色から緑色の長波長(波長495〜780nm)の可視光線で撮像するとよい。
【0014】
青色光を肋骨領域に照射することで、肋骨に付着した肉、脂肪を励起発光させる。これを長波長光のみで撮像すると、肋骨領域のみが緑色に色付けされ、各肋骨の輪郭が鮮明に識別できる画像を得ることができる。次に、切断面に白色光を当てて撮像すると、枝肉の外郭線及び背骨部位の輪郭が鮮明な画像を得ることができる。これらの画像を用いることで、頭部側からN番目の肋骨を正確に検出できる。
【0015】
N番目とは4番目又は5番目を指す。頭部側から4番目の肋骨と5番目の肋骨との間の背骨部位、又は5番目の肋骨と6番目との肋骨との間の背骨部位に第2切断点を位置決めする場合に、頭部側から4番目又は5番目の肋骨を特定する必要がある。第1撮像ステップ及び第2撮像ステップで得られた画像で、肋骨領域で最も下の肋骨は、最も頭部側に近い肋骨より2番目の肋骨であることが多いため、肋骨領域の最も下の肋骨を頭部側から2番目の肋骨と仮設定する。これから、上方へ向かってN番目の肋骨を検出する。
【0016】
次に、このN番目の肋骨と位置と、過去の計測値から求めた第1の閾値、第2の閾値及び第3の閾値の位置とを比較し、仮設定に対する修正を加える。最後に、左右に2分割された枝肉のうち、肋骨領域の中心と第1の閾値との高さの差が小さい方の検出結果を正として採用することで、誤差を最小限に抑えるようにしている。第1撮像ステップにより、肋骨領域を鮮明に撮像でき、第2撮像ステップにより背骨部位及びカタ高さ(切断面の外郭線上の肩部の位置)を鮮明に撮像できる。こうして撮像した画像で、肋骨領域及びカタ高さを正確に検出できる。そして、正確に検出した肋骨領域及びカタ高さを基準として設定した第1の閾値、第2の閾値及び第3の閾値を用いて、仮設定した肋骨の位置を修正することで、頭部側からN番目の肋骨の位置を正確に求めることができる。
【0017】
本発明方法において、中後躯体分割工程が、枝肉の切断面を撮像する撮像ステップと、撮像した画像から第3切断点を検出する検出ステップと、検出した第3切断点を通る中後躯切断線に沿って後躯体から中躯体を切断する切断ステップとからなるものであるとよい。これによって、中躯体の切断を完全自動化できると共に、前記処理ステップを個々の枝肉毎に行なうことで、大きさや重量が異なる枝肉に対して、中後躯切断線の設定を目標どおりに正確に行なうことができる。これによって、肉屑の発生を最小限に抑えることができる。
【0018】
前記検出ステップが、撮像した画像の画像情報から背骨の関節部を検出する第1ステップと、撮像した画像から背骨の輪郭の変曲点を検出する第2ステップと、前記変曲点に最も近い背骨の関節部を選定し、該関節部の位置を第3切断点とする第3ステップとからなるものであるとよい。本発明者等は、もも側最先端関節部が背骨の輪郭がカーブする変曲点の近傍にあることを見い出した。この知見を利用し、撮影した画像から検出した背骨の関節部のうち変曲点に最も近い関節部を選定することで、もも側最先端関節部を正確に検出できることがわかった。
【0019】
また、前記本発明方法の実施に直接使用可能な本発明の枝肉の分割装置は、背骨に沿って左右に2分割された家畜屠体の枝肉をもも側足首を介し懸垂する懸垂装置と、懸垂装置で懸垂された枝肉を前躯体、中躯体及び後躯体に分割する切断装置とを備えた枝肉の分割装置において、前躯体と中躯体とを分割する前中躯体分割部と、中躯体と後躯体とを分割する中後躯体分割部と、懸垂装置で懸垂された枝肉を前中躯体分割部及び中後躯体分割部を通り、かつ前中躯体分割部及び中後躯体分割部で一時停止させる搬送装置と、前中躯体分割部及び中後躯体分割部で枝肉の切断部位を教示する切断部位教示装置と、該切断部位教示装置から教示された切断部位に基づいて、切断装置の切断刃の動作を制御するコントローラとを備え、該コントローラは、頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、該第2切断点から胸骨側に向かって肋骨間を通り、肋骨先端から胸骨部位に交わる水平線と、第2切断点から背側輪郭へ向かう水平線とを前中躯体切断線とすると共に、前中躯体切断線が胸骨部位と交わる点を第1切断点とし、第1切断点から第2切断点に向かって前中躯体切断線に沿って前駆体を中躯体から切断し、背骨のもも側最先端関節部に第3切断点を設定し、寛骨を中躯体側に避けながら第3切断点を通る中後躯切断線に沿って中躯体を後躯体から切断するように制御するものである。
【0020】
本発明装置では、コントローラによって切断装置の切断刃の動作を制御し、前中躯切断線及び中後躯切断線に沿って枝肉を切断するようにしている。頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、この第2切断点から肋骨間を通る前中躯体切断線を設定することで、肋骨の切断をなくし、骨屑の発生をなくすことができる。また、滑らかな切断面を形成でき、肉屑の発生を抑え、切断後の肉部の品質低下を防止できる。
【0021】
また、中後躯体分割時に、背骨のもも側最先端関節部を第3切断点とすることで、中後躯切断線の設定が容易になると共に、寛骨の切断を回避でき、骨部の切断を最小限に抑えることができる。また、コントローラによって、前中躯切断線及び中後躯切断線を枝肉毎に設定することで、枝肉に固体差があっても、肋骨や寛骨の切断を回避でき、またギャンブレルへのつり下げ時の高さに誤差があっても、骨屑の発生を最小限に抑えることができる。そのため、切断後の肉部の品質劣化を抑えることができる。
【0022】
本発明装置の前中躯体分割部において、切断装置は、回転丸刃を備えた第1切断装置と、ナイフ状切断刃が装着された多関節アームを備えた第2切断装置とで構成され、胸骨先端部位及び背骨部位を回転丸刃で切断した後、残りの肉部を前中躯体切断線に沿ってナイフ状切断刃で切断するように構成するとよい。このように、回転丸刃の使用を骨部の切断のみとし、肉部の切断にはナイフ状切断刃を用いることで、肉部の切断面を滑らかな面とし、肉屑の発生を最小限に抑えることができる。これによって、切断後の肉部の品質劣化を抑えることができる。
【0023】
本発明装置の前中躯体分割部において、切断部位教示装置は、切断部位に向けてレーザ光を照射するレーザポインタと、該レーザポインタが装着され、レーザポインタを二次元方向任意位置に移動可能にするドラフタとで構成され、レーザ光が第1切断点及び第2切断点を照射したときのドラフタの位置情報をコントローラに入力するものであるとよい。これによって、オペレータがレーザポインタを操作し、第1切断点及び第2切断点にレーザ光を当てるだけの簡単な操作で、切断点の正確な設定が可能になる。
【0024】
本発明装置の前中躯体分割部において、切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、該撮像装置で撮像された画像を表示し、タッチパネル機能で第1切断点及び第2切断点の位置情報をコントローラに入力する表示装置とで構成されているとよい。これによって、オペレータが表示装置に表示された画像に第1切断点及び第2切断点をタッチするだけで、切断点の設定が可能になる。そのため、オペレータの作業をさらに軽減できる。
【0025】
本発明装置の前中躯体分割部において、切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、枝肉切断面の肋骨領域に青色光を照射する青色光照射灯と、枝肉切断面に白色光を照射する白色光照射灯と、前記撮像装置に設けられ、青色光以下の短波長光をカットし、緑色光以上の長波長光を該撮像装置に入光させるロングパスフィルタとを備え、コントローラは、青色光を肋骨領域に照射し、赤色から緑色の長波長光のみを入力させて撮像した画像と、白色光を枝肉切断面に照射して撮像した画像とから、肋骨領域及びカタ高さを検出する画像処理装置と、検出した肋骨領域及びカタ高さから、頭部側からN番目の肋骨を求める演算手段とを備えているとよい。
【0026】
N番目とは4番目又は5番目を指す。前記構成によって、頭部側から4番目又は5番目の肋骨を正確に検出できる。従って、4番目と5番目の肋骨間の背骨部位、又は5番目と6番目の肋骨間の背骨部位に第2切断点を位置決めできる。また、これによって、前中躯体分割部における切断工程を完全自動化できる。
【0027】
本発明装置の中後躯体分割部において、切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、該撮像装置で撮像された画像の画像情報から背骨のもも側最先端関節部を検出する画像処理装置とで構成されているとよい。このように、画像処理装置によってもも側最先端関節部を自動的に検出できるので、オペレータが手を貸す必要がなく、完全自動化できる。そのため、枝肉1頭毎の切断点の設定が容易になる。
【発明の効果】
【0028】
本発明によれば、特定の肋骨間を通る前中躯体切断線と、寛骨の切断を回避した中後躯切断線を設定できるので、肋骨の切断をなくし、骨屑の発生をなくすことができる。また、滑らかな切断面を形成でき、肉屑の発生を抑え、切断後の肉部の品質低下を防止できる。また、前中躯切断線及び中後躯切断線を枝肉毎に設定できるので、枝肉に固体差があっても、肋骨や寛骨の切断を回避でき、骨屑の発生を最小限に抑えることができる。そのため、切断後の肉部の品質劣化を抑えることができる。枝肉の大分割工程をほとんど人手によらず、機械により自動化でき、処理能力を向上できる。
【図面の簡単な説明】
【0029】
【図1】本発明を豚屠体に適用した第1実施形態に係る枝肉分割装置の全体正面図である。
【図2】前記枝肉分割装置で豚屠体の切断点を示す説明図である。
【図3】前記枝肉分割装置の制御装置のブロック線図である。
【図4】前記枝肉分割装置の前中躯体分割部の操作手順を示すフロー図である。
【図5】前記前中躯体分割部のクランプ装置を示す側面図である。
【図6】図5中のA―A矢視図である。
【図7】図5中のB―B矢視図である。
【図8】前記前中躯体分割部の切断工程を示す側面図である。
【図9】図8中のC―C矢視図である。
【図10】前記枝肉分割装置の中後躯体分割部の操作手順を示すフロー図である。
【図11】前記中後躯体分割部の画像処理工程を示すフロー図である。
【図12】前記中後躯体分割部の撮像工程を示す正面図である。
【図13】前記中後躯体分割部の撮像工程を示す側面図である。
【図14】図13中のD―D矢視図である。
【図15】図13中のE―E矢視図である。
【図16】前記中後躯体分割部の切断工程を示す側面図である。
【図17】図16中のF―F矢視図である。
【図18】前記画像処理工程で画像処理された画像を示す説明図である。
【図19】本発明の第2実施形態に係る前中躯体分割部の撮像工程を示す側面図である。
【図20】第2実施形態に係る前中躯体分割部の撮像工程を示す正面図である。
【図21】第2実施形態に係る枝肉分割装置の操作手順を示すフロー図である。
【図22】本発明の第3実施形態に係る前中躯体分割部の撮像工程を示す平面図である。
【図23】第3実施形態に係る枝肉分割装置の制御装置のブロック線図である。
【図24】第3実施形態に係る枝肉分割装置の操作手順を示すフロー図である。
【図25】第3実施形態に係る枝肉分割装置の画像処理手順を示すフロー図である。
【図26】第3実施形態で作成した枝肉切断面の合成画像を示す説明図である。
【図27】豚屠体の大分割ラインを示す説明図である。
【発明を実施するための形態】
【0030】
以下、本発明を図に示した実施形態を用いて詳細に説明する。但し、この実施形態に記載されている構成部品の寸法、材質、形状、その相対配置などは特に特定的な記載がない限り、この発明の範囲をそれのみに限定する趣旨ではない。
【0031】
(実施形態1)
本発明を豚屠体の大分割に適用した第1実施形態を図1〜図18に基づいて説明する。図1は、本実施形態に係る枝肉分割装置10の全体構成図であり、図2は、左右一対の枝肉WR及びWLの切断線b、c、u、vを示す。図1において、枝肉分割装置10は、前中躯体分割部A及び中後躯体分割部Bが、枝肉の搬送路を形成するレール12に対して、直列に配置されている。レール12は、水平方向に配置され、前中躯体分割部A及び中後躯体分割部Bの区画内上部領域を貫通するように配置されている。一次解体処理された豚屠体は、両もも側足首を介して1個のギャンブレル14に懸垂される。その状態で背側から背骨の真ん中を左右に2分割される。
【0032】
ギャンブレル14の上端には、レール12上を滑動するトロリ16が取り付けられている。ギャンブレル14は、一定時間停止した後、プッシャ15によって一定距離ずつ矢印a方向に押されることで、ギャンブレル14が断続歩進する。これによって、左右一対の枝肉WR、WLは、まず、前中躯体分割部Aに搬送され、前中躯体分割部Aで一定時間停止して前躯体Cが分離される。分離された前躯体Cはコンベア39上に落下し搬出される。前躯体Cが分離された枝肉WR、WLは、中後躯体分割部Bに搬送され、中後躯体分割部Bで中躯体Dが分離される。分離された中躯体Dは、コンベア66上に落下し搬出される。残った後躯体Eは、そのまま後工程に搬送される。
【0033】
前中躯体分割部Aには、正面側(図1中手前側)に、レーザポインタ20を備えたドラフタ18が設けられている。ドラフタ18は垂直方向に配置されたガイドバー22上を摺動可能に支持されている。ドラフタ18にレーザポインタ20が摺動可能に装着され、レーザポインタ20は、2次元平面の任意の位置に移動可能であり、かつ枝肉WR、WLに向けてレーザ光を照射可能に構成されている。そのため、レーザポインタ20から照射されるレーザ光を、枝肉WR、WLの任意の位置に合わせることができる。
【0034】
前中躯体分割部Aの正面側に、水平方向に支持バー24及び26が設けられている。支持バー24及び26間に、垂直方向に支持バー28が架設され、支持バー28に切断装置30が取り付けられている。切断装置30は、刃面が水平方向に配置された回転丸刃32を備え、回転丸刃32はエアシリンダ30a(図8参照)によって枝肉WR、WLに対し進退可能になっている。切断装置30は支持バー28上を摺動可能であり、支持バー28は支持バー24及び26上を摺動可能であり、そのため、回転丸刃32を枝肉WR、WLの任意の位置に配置可能になっている。
【0035】
前中躯体分割部Aの背面側(図1中奥側)に、6軸多関節アーム38が設けられている。図8に示すように、6軸多関節アーム38は先端に分割ナイフ38aが装着され、分割ナイフ38aを任意の向きにかつ任意の位置に動作できる。そのため、枝肉の所望部位を所望方向に切断可能になっている。
【0036】
また、切断装置30で前躯体Cを切断するとき、枝肉WR、WLを押えて固定するクランプ装置が設けられている。図5に示すように、該クランプ装置は、枝肉搬送路の正面側に設けられた前躯クランプ34及び中躯クランプ36と、枝肉搬送路の背面側に前躯クランプ34とほぼ同一高さに設けられた前躯クランプ35、及び中躯クランプ36とほぼ同一高さに設けられた中躯クランプ37とで構成されている。
【0037】
中後躯体分割部Bには、枝肉搬送路の正面側に、水平方向に支持バー40及び42が設けられ、支持バー40及び42間に支持バー44が架設されている。そして、支持バー44に切断装置46が取り付けられている。切断装置46は、刃面が水平方向に配置された回転丸刃48を備え、回転丸刃48はエアシリンダ46a(図17参照)によって枝肉WR、WLに対し進退可能になっている。切断装置46は支持バー44上を摺動可能であり、支持バー44は支持バー40及び42上を摺動可能に構成されている。そのため、回転丸刃48を枝肉WR、WLの任意の位置に配置可能になっている。
【0038】
中後躯体分割部Bには、支持バー50が水平方向に配置され、両側のフレーム52及び54間に架設されている。支持バー50の中央部に撮影用ライト58が取り付けられ、撮影用ランプ58の両側にCCDカメラ56a及び56bが取り付けられている。支持バー42及び54には操作盤60が設けられ、下部フレーム62には、CCDカメラ56a、56bで撮影され、画像処理された後の画像を表示し、タッチパネル機能を有する画像表示部64が設けられている。また、枝肉WR、WLを固定するクランプ装置として、枝肉搬送路の正面側に中躯クランプ59が設けられ、枝肉搬送路の背面側に、中躯クランプ41及び後躯バックサポート43(図13〜図17参照)が設けられている。
【0039】
図2は、枝肉WR、WLの骨格と、枝肉を前躯体C、中躯体D及び後躯体Eに大分割する左前中躯切断線b、左中後躯切断線c、右前中躯切断線u及び右中後躯切断線vを示す。豚屠体の骨格は、背骨s、肋骨r、棘突起m、寛骨j及び胸骨k等からなる。前中躯体分割部Aで、前躯体Cと中躯体Dとを分離する左前中躯切断線bは、枝肉WLの胸骨kに位置する左第1切断点dと、左第1切断点dの横方向で左第1切断点dの高さに対し上下に存在する肋骨r間(第4肋骨と第5肋骨間又は第5肋骨と第6肋骨間)の背骨sの左第2切断点eとを通る。右前中躯切断線uは、枝肉WRの背骨sの右第2切断点f(胸骨kに位置する右第1切断点gの横方向で右第1切断点gの高さに対し上下に存在する肋骨r間切断点)と、右第1切断点gとを通る。
【0040】
また、中後躯体分割部Bで、中躯体Dと後躯体Eとを分離する左中後躯切断線cは、背骨sのもも側最先端関節部の左第3切断点hを通り、右中後躯切断線vは右第3切断点iを通る。中躯体Dと後躯体Eとを分離するとき、回転丸刃48を正面側から背面側に向って斜め下方に進入させ、寛骨jの切断を回避している(図16参照)。
【0041】
図3は、枝肉分割装置10の制御装置を示す。図3において、コントローラ70は、CPU72と、画像処理装置76と、画像表示部64と、画像メモリ74とで構成されている。プッシャ15、前記クランプ装置の駆動装置及びCCDカメラ56a、56b、撮影用ライト58の動作をCPU72で制御する。また、レーザポインタ20で得られた切断点d、e、f及びgの位置情報、及びCCDカメラ56a、56bで撮影され、画像処理装置76で画像処理された画像がCPU72に入力され、画像メモリ74に記憶される。該画像は画像表示部64に表示される。CPU72は、切断点d、e、f及びgの位置情報及び画像処理された画像情報から得られる切断点h及びiの位置情報に基づいて、切断装置30及び46の動作を制御する。
【0042】
次に、前中躯体分割部Aで前躯体Cを切断する切断工程を説明する。図4にコントローラ70による操作手順を示す。1個のギャンブレル14に懸垂された左右一対の枝肉WR及びWLが前中躯体分割部Aに搬入され停止する(S10)。図5〜図7に示すように、正面側の前躯クランプ34及び中躯クランプ36と、背面側の前躯クランプ35及び中躯クランプ37が枝肉側に接近し、両側から枝肉WR、WLを押え固定する(S12)。前躯クランプ34及び35は、枝肉の両側から前躯体Cを押える。中躯クランプ36及び37は、枝肉の両側から中躯体Dを押える。
【0043】
これらのクランプは枝肉搬送路に対して進退可能に構成され、かつ前躯クランプ34及び35は上下方向に移動可能になっている。前躯クランプ34は1本のバーが水平方向に配置され、中躯クランプ36は2本のバーが水平方向に配置されている。図6に示すように、前躯クランプ37は、枝肉の搬送方向に2個の円弧状の押え板37aを備え、押え板37aで枝肉を囲むようにする。図7に示すように、前躯クランプ35は、押え板37aより曲率半径が大きい2個の円弧状押え板35aを備えている。
【0044】
次に、オペレータがドラフタ18を操作し、レーザポインタ20で切断点d、e、f及びgの順にレーザ光を当てる。各切断点にレーザ光を当てるたびに、各切断点専用の押しボタン20aを押すことで、各切断点の位置情報をコントローラ70に送信する(S14)。
【0045】
図8に示すように、枝肉搬送路の正面側に設けられた切断装置30は、エアシリンダ30aにより枝肉に対して進退可能に構成されている。枝肉搬送路の背面側に設けられた6軸多関節アーム38は、先端に分割ナイフ38aが装着され、コントローラ70によって、分割ナイフ38aを任意位置に移動可能であると共に、分割ナイフ38aの向きを任意方向に向けることができる。
【0046】
前記切断点の位置情報に基づいて、コントローラ70によって、切断装置30の回転丸刃32を切断点d、e、f及びgの順に移動させ、胸骨先端部位及び背骨部位を切断する(S16)。このときの回転丸刃32の移動軌跡を図9中のラインlで示す。即ち、回転丸刃32は、胸骨部位又は背骨部位を切断した後、一旦後退し、その後枝肉の搬送方向(矢印a方向)に移動し、次の切断位置で枝肉に向かって進む移動軌跡を辿る。
【0047】
次に、コントローラ70によって6軸多関節アーム38を動作させ、左前中躯切断線bに沿い切断点d、e、f及びgの順に移動させ、枝肉WR、WLの肉部を切断する(S18)。この2段階の切断動作で、枝肉WR、WLの前躯体Cを中躯体Dから分離させる。分離された前躯体Cは、コンベア39上に落下し、コンベア39で搬送される。次に、クランプ34〜37が枝肉から離れ(S20)、その後、プッシャ15によってギャンブレル14が矢印a方向に押され、枝肉WR、WLは中後躯体分割部Bに移動する(S22)。
【0048】
図10に中後躯体分割部Bでのコントローラ70による操作手順を示し、図11に画像処理ステップ(S38)の操作手順を示す。中後躯体分割部Bに移動した枝肉はそこで一時停止する(S30)。図12〜図15に示すように、中後躯体分割部Bには、正面側に中躯体Dを押える中躯クランプ59が設けられ、背面側に中躯体Dを押える中躯クランプ41及び後躯体Eを押える後躯バックサポート43が設けられている。枝肉WR、WLが停止すると、前記クランプ59、41及び43が両側から枝肉に近づき、枝肉をクランプする(S32)。
【0049】
正面側中躯クランプ59は、水平方向に配置された2本のバーからなる。背面側中躯クランプ41は、枝肉を背面側から押える2個の円弧状の押え板41aを備えている。後躯バックサポート43は、水平方向に配置されたサポートバーの両端に、枝肉側に突出する後躯逃げ防止ガイド43a及び43bが取り付けられ、枝肉WR、WLを両側から囲うようにしている。これによって、後躯体Eの脱落を防止している。
【0050】
次に、撮影用ライト58及びCCDカメラ56a、56bを所定位置に配置し、撮影用ライト58で枝肉WR、WLを照射すると共に、CCDカメラ56a、56bで枝肉の切断面nをWLからWRの順に撮影する。撮像した画像は画像メモリ74に保存される(S34・S36)。枝肉の切断面nは、クランプ装置で固定された状態で、正面に対し斜めに配置される。そのため、CCDカメラ56a、56bは、レンズが両枝肉の切断面nに正対するように、枝肉WR、WLの両側に配置され、レンズは夫々枝肉WR、WLの切断面nに向けられている。CCDカメラ56a、56bには、肉片付着防止用カバー57a、57bが設けられ、撮影時以外は、レンズに肉片が付着しないように、該肉片付着防止用カバーを閉じた状態としておく。
【0051】
CCDカメラ56a、56bで撮影した画像は、画像処理装置76で画像処理され(S38)、画像処理後の画像はCPU72に送られ、画像メモリ74に記憶されると共に、画像表示部64に表示される(S40)。この画像により左第3切断点h及び右第3切断点iを検出し、CCDカメラ56a、56bのレンズカバー57a、57bを閉じた後(S42)、左第3切断点hを通る左中後躯切断線c及び右第3切断点iを通る右中後躯切断線vに沿って、中躯体Dを切断する(S44)。図16及び図17は、切断装置46の回転丸刃48で中躯体Dを切断する状態を示す。
【0052】
以下、図11により、画像処理ステップ(S38)の処理手順を説明する。図18に画像処理され、画像表示部64に表示された切断面nの処理画面を示す。画像上で確実に背骨sの輪郭を得るために、背骨sの輪郭に段差があることを利用し、枝肉の下方から撮影用ライト58によって白色光を照射し、背骨sの輪郭に影ができるようにした。撮影用ライト58として、指向性が強く、反応性が良いLED照明を使用し、これを可能にした。次に、画像のR―G―B成分毎の平均輝度差等を求め、背骨sの輪郭を抽出すると共に(S380)、背骨sの輪郭の変曲点oを求めた(S382)。
【0053】
次に、同様の手法で変曲点o近傍の関節部pの抽出を行う(S384)。該関節部pを抽出できたときは、関節部pから輪郭に対して水平線qを引き、水平線qと輪郭との交点を切断点h(i)とした(S386)。関節部pを抽出できなかったときは、変曲点oを切断点h(i)とした(S388)。こうして求めた左右枝肉WR、WLの切断点i及びhの二次元座標のうち垂直方向座標(Y座標)を比較し(S390)、その差Δtが閾値以下であるとき、切断点h(i)を正しいと判定する(S394)。差Δtが閾値を超えたとき、切断点h(i)は誤りと判定し、タッチパネル教示に切り替える。即ち、オペレータが画像表示部64に表示された画像に切断点を示し、切断点h(i)を教示する(S392)。この教示情報に基づいて、切断装置46が動作し、中躯体Dを切断する。
【0054】
図16及び図17において、切断装置46はエアシリンダ46aによって枝肉搬送路に対し進退自在に構成されている。このとき、切断装置46の回転丸刃48は、寛骨jの切断を避けるため、正面側から背面側に向かって斜め下方に進入するように構成されている。また、回転丸刃48はエアシリンダ46bによって回動軸46cを中心に回動可能に構成されている。かかる構成によって、回転丸刃48は、枝肉WLの中躯体Dを切断した後、一旦後退し、次に、枝肉WR側に向きを変え、枝肉WRに近づいて枝肉WRの中躯体Dを切断した後、後退する動作を行なうことができる。
【0055】
図10において、画像処理(S48)の後、画像表示部64に、画像処理された画像及び第3切断点h(i)の座標が表示される(S40)。次に、CCDカメラ56a、56bのレンズカバー57a、57bが閉じられ(S42)、切断装置46が動作し、切断線cに沿って中躯体Dを切断する(S44)。次に、クランプ装置が動作し、後躯体Eの固定を解除する(S46)。次に、中後躯体分割部Bから、枝肉WR、WLの後躯体Eが後工程に搬出される(S48)。
【0056】
本実施形態によれば、前中躯体分割部Aでは、胸骨部位の左右第1切断点d、g及び該左右第1切断点の横方向で該左右第1切断点の上下に存在する肋骨rの間に位置する背骨部位の左右第2切断点e、fを切断点に設定し、中後躯体分割部Bでは、背骨sのもも側最先端関節部の左右第3切断点h、iを切断点とすることで、切断点の認知と設定が容易になる。また、これらの切断点を通る左前中躯切断線b、左中後躯切断線c、右前中躯切断線u及び右中後躯切断線vに沿って枝肉を切断することで、肋骨r及び寛骨jの切断を回避でき、骨屑の発生を最小限にすることができる。そのため、切断後の肉部の品質劣化を抑えることができる。
【0057】
さらには、枝肉1頭毎に左右第1切断点b、g、左右第2切断点e、f及び左右第3切断点h、iを検出し直しているので、枝肉の大きさや形状に固体差があっても、またギャンブレルへの吊り下げ時の高さ方向に誤差があっても、切断精度を高く維持でき、肋骨rや寛骨jを切断するおそれはない。このことは、同一ギャンブレル14で同時に切断処理される左右枝肉間の固体差や吊り下げ高さ誤差に対しても、同様である。
【0058】
また、前中躯体分割部Aで、回転丸刃32の使用を胸骨先端部位や背骨部位のみとし、肉部の切断に分割ナイフ38aを用いたことで、肉部で滑らかな切断面を形成でき、肉屑や骨屑の発生を最小限に抑えることができる。これによって、切断後の肉部の劣化を抑えることができる。また、前中躯体分割部Aで、オペレータがドラフタ18に設けられたレーザポインタ20を操作するだけの簡単な操作で、切断点d、e、f及びgの位置決めを可能にする。
【0059】
また、中後躯体分割部Bでは、画像処理装置76で左右第3切断点h、iを自動的に検出できるので、オペレータの手を借りることなく、左右第3切断点h、iの検出を完全自動化できる。この画像処理ステップは、背骨sの輪郭を抽出すると共に、背骨sの輪郭の変曲点oを求め、変曲点oに最も近い関節部を選定し、さらに、左右枝肉WR、WLの切断点i及びhの垂直方向座標(Y座標)を比較し、その差Δtが閾値以下であるとき、切断点h、iを正しいと判定しているので、左右第3切断点h、iを正確に検出できる。また、画像処理により、左右第3切断点h、iを検出できなかったときは、オペレータが画像表示部64に表示された画像に左右第3切断点h、iを教示するようにしているので、切断動作を中断するおそれがない。
【0060】
また、枝肉の切断面nは、クランプ装置で固定された状態で、正面に対し斜めに配置される。これに対し、中後躯体分割部Bでは、CCDカメラ56a、56bのレンズが両枝肉の切断面nに正対するように、枝肉WR、WLの両側に配置し、レンズを夫々枝肉WR、WLの切断面nに向けているので、切断面nを明瞭に撮影できる。また、中後躯体分割部Bで、背骨の輪郭に段差があることを利用し、枝肉の下方から撮影用ランプ58によって白色光を照射し、背骨sの輪郭に影ができるように撮影すると共に、撮影用ランプ58として、指向性が強く、反応性が良いLED照明を使用したので、画像上で確実に背骨sの輪郭を得ることができた。
【0061】
(実施形態2)
次に、本発明方法及び装置の第2実施形態を図19〜図21に基づいて説明する。本実施形態は、第1実施形態と同様に豚屠体の大分割工程に適用したものである。図19及び図20は本実施形態の前中躯体分割部Aを示す。本実施形態は、ドラフタ18及びレーザポインタ20の代わりに、CCDカメラ80、撮影用ライト82及びタッチパネル式の画像表示部84を備えている。CCDカメラ80及び撮影用ライト82は、前躯体Cと同一の高さで枝肉WR、WLの中央に配置されている。前中躯体分割部Aのその他の構成は、第1実施形態と同一であり、中後躯体分割部Bの構成は第1実施形態と同一である。
【0062】
図21により、前中躯体分割部Aの制御手順を説明する。枝肉WR、WLが前中躯体分割部Aに搬入され停止する(S50)。次に、クランプ装置により枝肉WR、WLを固定する(S52)。次に、CCDカメラ80で枝肉WR、WLの切断面を撮影し、撮影した画像は画像メモリ74に保存すると共に(S54)、画像表示部84に表示される(S56)。画像表示部84に表示された画像に対し、オペレータが切断点d、e、f及びgをタッチし、切断点d、e、f及びgの位置情報がコントローラ70に入力される(S58)。
【0063】
次に、CCDカメラ80のレンズカバー57a、57bが閉じられ(S60)、その後の切断工程は、図4に示す第1実施形態と同一である。前躯体Cを分離した後、クランプ装置の固定が解除され(S66)、枝肉WR、WLの後躯体Eが後工程へ搬出される(S68)。本実施形態によれば、切断点d、e、f及びgの検出をタッチパネル式としたことで、第1実施形態よりオペレータの労力を軽減できる。
【0064】
(実施形態3)
次に、本発明の第3実施形態を図22〜図26に基づいて説明する。図22は前中躯体分割部Aを示す。前中躯体分割部Aでクランプ等で固定された枝肉WR、WLに対面する位置にCCDカメラ90が設けられている。CCDカメラ90の前面にロングパスフィルタ92が設けられ、かつロングパスフィルタ92をCCDカメラ90から着脱可能にする着脱シリンダ92aが設けられている。また、CCDカメラ90の近くに白色光を照射する一対の白色照明ライト(LED照明)94a及び94bが設けられている。白色照明ライト94a及び94bは互いに交差する方向に向けられている。即ち、白色照明ライト94aは枝肉WRの切断面nを照射するように枝肉WRに向けられ、照明ライト94bは枝肉WLの切断面nを照射するように枝肉WLに向けられている。
【0065】
また、枝肉WR、WLに対面する位置に青色光を照射する一対の青色照明ライト(LED照明)96a及び96bが設けられている。青色照明ライト96aが枝肉WRの切断面nを照射し、青色照明ライト96bが枝肉WLの切断面nを照射する。
【0066】
図23に本実施形態の制御系を示す。コントローラ100は、CPU102と、前中躯体分割部Aに設けられたCCDカメラ90で撮像した画像が入力され、該画像を加工する前駆画像処理装置104と、前駆画像処理装置104で加工された画像及び第1切断点d(g)、第2切断点e(f)等が表示される前駆画像表示部108と、これらが記憶される前駆画像メモリ112と、中後躯体分割部Bでの切断工程に用いられる後躯画像処理装置106、後躯画像表示部110及び後躯画像メモリ114とを備えている。後躯画像処理装置106は図3の画像処理装置76と同一構成を有し、後躯画像表示部110は図3の画像表示部64と同一構成を有し、後躯画像メモリ114は図3の画像メモリ74と同一構成を有している。コントローラ100は、前記クランプ装置の駆動装置やプッシャ15の駆動を制御するほか、ロングパスフィルタ92の着脱シリンダ92aの駆動を制御する。
【0067】
次に、図24〜図26により本実施形態の切断工程を説明する。図24において、左右一対の枝肉WR、WLが前中躯体分割部Aに搬入され停止する(S70)。枝肉WR、WLが停止したら、正面側の前駆クランプ34、中駆クランプ36及び背面側の前駆クランプ35、中駆クランプ37で両側から枝肉WR、WLを押え固定する(S72)。次に、青色照明ライト96a及び96bで,波長が470nmの青色光を枝肉WR、WLの肋骨領域に照射すると共に、495nm以下の波長光をカットするロングパスフィルタ92をCCDカメラ90に装着する(S74)。
【0068】
青色光を肋骨領域に照射することで、各肋骨の周囲にある脂肪や肉の部分を励起発光させることができる。この状態の肋骨領域をロングパスフィルタ92を通してCCDカメラ90で撮像する。ロングパスフィルタ92から緑色から赤色の長波長光のみが透過し、CCDカメラ90で撮像した画像は肋骨領域が緑色に着色された画像となる。この画像Bを前駆画像メモリ112に保存する(S76)。次に、青色照明ライト96a、96bを消し、ロングパスフィルタ92をCCDカメラ90から外し(S78)、白色照明ライト94a及び94bを枝肉WR、WLの切断面nに照射する(S80)。この状態で切断面nをCCDカメラ90で撮像し、撮像した画像Wを前駆画像メモリ112に保存する(S82)。
【0069】
次に、前駆画像メモリ108に保存した画像B及び画像Wの処理工程(S84)を図25で説明する。図26は、画像Bと画像Wとを合成した合成画像を示している。合成画像は、肋骨領域Rを画像Bから取り、その他の領域は画像Wから取って合成したものである。肋骨領域Rは緑色に着色されている。また、白色照明ライト94aから枝肉WRに白色光を斜めに照射し、白色照明ライト94bから枝肉WLに斜めに照射しているので、背骨sの輪郭に沿って影yを形成し、これによって、背骨sの輪郭を鮮明に浮き出している。
【0070】
画像処理工程84は、頭部側から4番目の肋骨を検出するための処理工程であり、この手順を図25により説明する。図25において、画像Wから枝肉WR、WLの背骨と、カタ(肩)の外形ラインxの位置を検出すると共に(S840)、画像Bから肋骨領域Rの下端tの位置を検出する(S842)。さらに、合成画像で肋骨領域Rを抽出する(S844)。
【0071】
合成画像に表される肋骨領域Rで認識できる一番下の肋骨は、頭部側から2番目の肋骨であることが多い。そのため、肋骨領域Rの一番下の肋骨r2は頭部側から2番目の肋骨であると仮設定する(S846)。次に、肋骨r2から2つ上の肋骨を4番目の肋骨r4として検出する(S848)。ここで、3つの閾値を設定する。1つの閾値A1は、肋骨領域下端tを基準とし、下から3本目の肋骨r3と下から4本目の肋骨r4との境界を示す閾値である。2つ目の閾値A2は、カタ外形ラインxを基準とし、下から3本目の肋骨r3と4本目の肋骨r4との境界を示す閾値である。3つ目の閾値B1は、肋骨領域下端tを基準とし、4本目の肋骨r4と5本目の肋骨r5との境界を示す閾値である。閾値A1及び閾値B1は、過去の測定で収集した肋骨領域下端tの測定値に基づいて、肋骨領域下端tを独立変数とする一次関数から求めている。閾値A2は、過去の測定で収集したカタ外形ラインxの測定値からカタ外形ラインxを独立変数とする一次関数から求めている。
【0072】
次に、肋骨r4と閾値A1及びA2との高さを比較し(S850)、肋骨r4が閾値A1及び閾値A2より下にあるとき、肋骨r4の1本上の肋骨を4本目の肋骨とみなす(S852)。肋骨r4が閾値A1と閾値A2との間にあるとき、肋骨r4と閾値A1及び閾値A2の中間の閾値Am(=(A1+A2)/2)と比較し(S853)、肋骨r4が閾値Amより下にあるとき、肋骨r4の1本上の肋骨を4本目の肋骨とみなす(S854)。
【0073】
さらに、肋骨r4と閾値B1の高さを比較し(S856)、肋骨r4が閾値B1より上にあるとき、肋骨r4より1本上の肋骨を4本目とみなす(S858)。次に、枝肉WR、WLの肋骨重心Gの高さ位置と閾値A1の高さ位置を比較する(S860)。肋骨重心Gとは、肋骨領域Rの中心であり、枝肉WR、WLのうち肋骨重心Gと閾値A1との高さ方向の距離が近いほうの枝肉の肋骨の検出結果を正とする(S862)。こうして、下から4本目と認定した肋骨の上辺先端から伸ばした水平線が胸骨kと交わる点を第1切断点d、gとする(S864)。また、4本目と認定された肋骨の上辺と背骨sとが交わる点を第2切断点e、fとする(S866)。こうして検出した第1切断点d、g及び第2切断点e、fの座標を6軸多関節アーム38に送る(S868)。
【0074】
次に、図24に戻り、画像B、W、合成画像C及び第1切断点d、g、第2切断点e、fの座標を前駆画像表示部106に表示する(S88)。そして、切断装置30により、胸骨部位及び背骨部位の切断を行い(S90)、さらに、6軸多関節アーム38による肉部の切断を行い、枝肉WR、WLから前駆体Cを切断する(S92)。その後、クランプ34〜37によるワーク押えを解除し(S94)、枝肉WR、WLを中後躯体分割部Bに搬出する(S96)。
【0075】
本実施形態によれば、枝肉WR、WLの肋骨領域に青色光を照射し、肋骨周囲の脂肪や肉部を励起発光させることで、肋骨領域Rを鮮明に撮像できると共に、白色光を照射して枝肉の外形や背骨sの輪郭を鮮明に撮像できる。これらの画像から検出した肋骨領域下端t及びカタ外形ラインxを基準とし、過去に収集した測定値から、これら基準との距離を設定した閾値A1、A2及びB1を用いて、頭部側から4番目の肋骨を正確に検出できる。こうして検出した肋骨を基点として、第1切断点d、g、第2切断点e、fや前中躯体切断線b、uを設定するので、肋骨rの切断を回避でき、骨屑の発生をなくすことができる。そのため、切断後の肉部の品質低下を防止できる。
【0076】
また、白色照明ライト94a及び94bから照明する白色光を、夫々枝肉WR、WLの切断面nに対して斜めに当てているので、背骨sの輪郭に影yを形成できる。そのため、背骨sの輪郭を鮮明に画像上に表すことができ、背骨sの輪郭を基点として肋骨位置を正確に検出することもできる。また、各枝肉毎に前記手順で肋骨r4の検出を行うので、枝肉の固定差による後検出をなくすことができる。さらに、本実施形態によって、前中躯体切断線b、uを設定することで、前中躯体分割部Aでの切断ラインの設定を含めた脱骨処理を完全自動化できる。
【産業上の利用可能性】
【0077】
本発明によれば、枝肉の大分割工程で、骨部の切断を最小限に低減し、骨屑の発生を低減でき、切断後の肉部の品質劣化を抑えることができると共に、枝肉の固体差に応じた切断が可能になる。
【符号の説明】
【0078】
10 枝肉分割装置
12 レール
14 ギャンブレル
15 プッシャ
16 トロリ
18 ドラフタ
20 レーザポインタ
20a 押しボタン
22 ガイトバー
24,26,28,40,42,44,50 支持バー
30,46 切断装置
30a,46a,46b エアシリンダ
32,48 回転丸刃
34,35 前躯クランプ
35a,37a,41a 押え板
36,37,41,59 中躯クランプ
38 6軸多関節アーム
38a 分割ナイフ
39,66 コンベア
43 後躯バックサポート
46c 回動軸
52,54 フレーム
56a,56b,80、90 CCDカメラ
58,82 撮影用ライト
57a、57b レンズカバー
60 操作盤
62 下部フレーム
64,84 画像表示部
70,100 コントローラ
72,102 CPU
74 画像メモリ
76 画像処理装置
92 ロングパスフィルタ
92a 着脱シリンダ
94a、94b 白色照明ライト
96a、96b 青色照明ライト
104 前駆画像処理装置
106 後躯画像処理装置
108 前駆画像表示部
110 後躯画像表示部
112 前駆画像メモリ
114 後躯画像メモリ
A 前中躯体分割部
A1、A2、B1 閾値
B 中後躯体分割部
C 前躯体
D 中躯体
G 肋骨重心
E 後躯体
R 肋骨領域
WR,WL 枝肉
a 搬送方向
b 左前中躯切断線
c 左中後躯切断線
d 左第1切断点
g 右第1切断点
e 左第2切断点
f 右第2切断点
h 左第3切断点
i 右第3切断点
j 寛骨
k 胸骨
m 棘突起
o 変曲点
p 背骨関節部
q 直線
r 肋骨
s 背骨
t 肋骨領域下端
u 右前中躯切断線
v 右中後躯切断線
x カタ外形ライン
y 影
【特許請求の範囲】
【請求項1】
背骨に沿って左右に2分割された家畜屠体の枝肉をもも側足首を介し懸垂装置で懸垂した状態で前躯体、中躯体及び後躯体に分割する枝肉の分割方法において、
頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位
を第2切断点とし、第2切断点から胸骨側に向かって肋骨間を通り、肋骨先端から胸骨部位に交わる水平線と、第2切断点から背側輪郭へ向かう水平線とを前中躯体切断線とすると共に、前中躯体切断線が胸骨部位と交わる点を第1切断点とし、第1切断点から第2切断点に向かって前中躯体切断線に沿って前駆体を中躯体から切断する前中躯体分割工程と、
背骨のもも側最先端関節部に第3切断点を設定し、寛骨を中躯体側に避けながら該第3切断点を通る中後躯切断線に沿って中躯体を後躯体から切断する中後躯体分割工程とからなり、
前記前中躯切断線及び前記中後躯切断線を枝肉毎に位置決めするようにしたことを特徴とする枝肉の分割方法。
【請求項2】
前記前中躯体分割工程が、
前記胸骨部位及び前記背骨部位を回転丸刃で切断する第1切断ステップと、該第1切断ステップの後で、多関節アームに装着されたナイフ状切断刃によって残りの肉部を前記前中躯切断線に沿い切断する第2切断ステップとからなることを特徴とする請求項1に記載の枝肉の分割方法。
【請求項3】
前記前中躯体分割工程において、
青色の可視光線を枝肉切断面に照射して肋骨領域を励起発光させ、青色以下の短波長の可視光線をカットし、赤色から緑色の長波長の可視光線のみを撮像装置に入光させ、肋骨領域を該撮像装置で撮像する第1撮像ステップと、
特定波長の可視光線を除かない白色可視光線を枝肉切断面に照射して枝肉切断面を撮像装置で撮像する第2撮像ステップと、
前記第1撮像ステップ及び前記第2撮像ステップで撮像した画像から、肋骨領域及びカタ高さを検出する枝肉検出ステップと、
前記肋骨領域の最も下に位置する肋骨を頭部側から2番目の肋骨と仮設定し、該2番目の肋骨からN番目の肋骨を検出する仮設定ステップと、
過去の計測値から、肋骨領域の下端を基準とし、(N−1)番目の肋骨とN番目の肋骨の境界を示す第1の閾値と、カタの高さを基準とし、(N−1)番目の肋骨とN番目の肋骨の境界を示す第2の閾値と、肋骨領域の下端を基準にし、N番目の肋骨と(N+1)番目の肋骨との境界を示す第3の閾値とを求める閾値設定ステップと、
前記仮設定ステップで検出したN番目の肋骨が、第1の閾値及び第2の閾値の平均値より下方に位置するとき、該N番目の肋骨の直上の肋骨をN番目の肋骨とみなす第1修正ステップと、
前記仮設定ステップで検出したN番目の肋骨が、第3の閾値より上方に位置するとき、該N番目の肋骨の直下の肋骨をN番目の肋骨とする第2修正ステップと、
左右に2分割された枝肉の肋骨領域の中心と前記第1の閾値との高さの差を比較し、該差が小さい方の枝肉で得られた肋骨の検出結果を採用する選択ステップとを行うことを特徴とする請求項1又は2に記載の枝肉の分割方法。
【請求項4】
前記中後躯体分割工程が、
枝肉の切断面を撮像する撮像ステップと、撮像した画像から前記第3切断点を検出する検出ステップと、検出した第3切断点を通る前記中後躯切断線に沿って後躯体から中躯体を切断する切断ステップと、からなることを特徴とする請求項1に記載の枝肉の分割方法。
【請求項5】
前記検出ステップが、撮像した画像の画像情報から背骨の関節部を検出する第1ステップと、撮像した画像から背骨の輪郭の変曲点を検出する第2ステップと、前記変曲点に最も近い背骨の関節部を選定し、該関節部の位置を前記第3切断点とする第3ステップとからなることを特徴とする請求項4に記載の枝肉の分割方法。
【請求項6】
背骨に沿って左右に2分割された家畜屠体の枝肉をもも側足首を介し懸垂する懸垂装置と、該懸垂装置で懸垂された枝肉を前躯体、中躯体及び後躯体に分割する切断装置とを備えた枝肉の分割装置において、
前躯体と中躯体とを分割する前中躯体分割部と、中躯体と後躯体とを分割する中後躯体分割部と、前記懸垂装置で懸垂された枝肉を前中躯体分割部及び中後躯体分割部を通り、かつ前中躯体分割部及び中後躯体分割部で一時停止させる搬送装置と、前中躯体分割部及び中後躯体分割部で枝肉の切断部位を教示する切断部位教示装置と、該切断部位教示装置から教示された切断部位に基づいて、前記切断装置の切断刃の動作を制御するコントローラと、を備え、
前記コントローラは、頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、該第2切断点から胸骨側に向かって肋骨間を通り、肋骨先端から胸骨部位に交わる水平線と、第2切断点から背側輪郭へ向かう水平線とを前中躯体切断線とすると共に、前中躯体切断線が胸骨部位と交わる点を第1切断点とし、第1切断点から第2切断点に向かって前中躯体切断線に沿って前駆体を中躯体から切断し、背骨のもも側最先端関節部に第3切断点を設定し、寛骨を中躯体側に避けながら該第3切断点を通る中後躯切断線に沿って中躯体を後躯体から切断するように制御するものであることを特徴とする枝肉の分割装置。
【請求項7】
前記前中躯体分割部において、前記切断装置は、回転丸刃を備えた第1切断装置と、ナイフ状切断刃が装着された多関節アームを備えた第2切断装置とで構成され、
前記胸骨部位及び前記背骨部位を前記回転丸刃で切断した後、残りの肉部を前記前中躯体切断線に沿って前記ナイフ状切断刃で切断するように構成したことを特徴とする請求項6に記載の枝肉の分割装置。
【請求項8】
前記前中躯体分割部において、前記切断部位教示装置は、切断部位に向けてレーザ光を照射するレーザポインタと、該レーザポインタが装着され、レーザポインタを二次元方向任意位置に移動可能にするドラフタとで構成され、レーザ光が前記第1切断点及び第2切断点を照射したときのドラフタの位置情報を前記コントローラに入力するものであることを特徴とする請求項6又は7に記載の枝肉の分割装置。
【請求項9】
前記前中躯体分割部において、前記切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、該撮像装置で撮像された画像を表示し、タッチパネル機能で前記第1切断点及び第2切断点の位置情報を前記コントローラに入力する表示装置とで構成されていることを特徴とする請求項6又は7に記載の枝肉の分割装置。
【請求項10】
前記前中躯体分割部において、前記切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、枝肉切断面の肋骨領域に青色の可視光線を照射する青色光照射灯と、枝肉切断面に特定波長の可視光線を除かない白色可視光線を照射する白色光照射灯と、前記撮像装置に設けられ、青色以下の短波長の可視光線をカットし、緑色以上の長波長の可視光線のみを該撮像装置に入光させるロングパスフィルタとを備え、
前記コントローラは、青色の可視光線を肋骨領域に照射し、赤色から緑色の長波長の可視光線のみで撮像した画像と、特定波長の可視光線を除かない白色可視光線を枝肉切断面に照射して撮像した画像とから、肋骨領域及びカタ高さを検出する画像処理装置と、検出した肋骨領域及びカタ高さから頭部側からN番目の肋骨を求める演算手段とを備えていることを特徴とする請求項6又は7に記載の枝肉の分割装置。
【請求項11】
前記中後躯体分割部において、前記切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、該撮像装置で撮像された画像の画像情報から背骨のもも側最先端関節部を検出する画像処理装置とで構成されていることを特徴とする請求項6に記載の枝肉の分割装置。
【請求項1】
背骨に沿って左右に2分割された家畜屠体の枝肉をもも側足首を介し懸垂装置で懸垂した状態で前躯体、中躯体及び後躯体に分割する枝肉の分割方法において、
頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位
を第2切断点とし、第2切断点から胸骨側に向かって肋骨間を通り、肋骨先端から胸骨部位に交わる水平線と、第2切断点から背側輪郭へ向かう水平線とを前中躯体切断線とすると共に、前中躯体切断線が胸骨部位と交わる点を第1切断点とし、第1切断点から第2切断点に向かって前中躯体切断線に沿って前駆体を中躯体から切断する前中躯体分割工程と、
背骨のもも側最先端関節部に第3切断点を設定し、寛骨を中躯体側に避けながら該第3切断点を通る中後躯切断線に沿って中躯体を後躯体から切断する中後躯体分割工程とからなり、
前記前中躯切断線及び前記中後躯切断線を枝肉毎に位置決めするようにしたことを特徴とする枝肉の分割方法。
【請求項2】
前記前中躯体分割工程が、
前記胸骨部位及び前記背骨部位を回転丸刃で切断する第1切断ステップと、該第1切断ステップの後で、多関節アームに装着されたナイフ状切断刃によって残りの肉部を前記前中躯切断線に沿い切断する第2切断ステップとからなることを特徴とする請求項1に記載の枝肉の分割方法。
【請求項3】
前記前中躯体分割工程において、
青色の可視光線を枝肉切断面に照射して肋骨領域を励起発光させ、青色以下の短波長の可視光線をカットし、赤色から緑色の長波長の可視光線のみを撮像装置に入光させ、肋骨領域を該撮像装置で撮像する第1撮像ステップと、
特定波長の可視光線を除かない白色可視光線を枝肉切断面に照射して枝肉切断面を撮像装置で撮像する第2撮像ステップと、
前記第1撮像ステップ及び前記第2撮像ステップで撮像した画像から、肋骨領域及びカタ高さを検出する枝肉検出ステップと、
前記肋骨領域の最も下に位置する肋骨を頭部側から2番目の肋骨と仮設定し、該2番目の肋骨からN番目の肋骨を検出する仮設定ステップと、
過去の計測値から、肋骨領域の下端を基準とし、(N−1)番目の肋骨とN番目の肋骨の境界を示す第1の閾値と、カタの高さを基準とし、(N−1)番目の肋骨とN番目の肋骨の境界を示す第2の閾値と、肋骨領域の下端を基準にし、N番目の肋骨と(N+1)番目の肋骨との境界を示す第3の閾値とを求める閾値設定ステップと、
前記仮設定ステップで検出したN番目の肋骨が、第1の閾値及び第2の閾値の平均値より下方に位置するとき、該N番目の肋骨の直上の肋骨をN番目の肋骨とみなす第1修正ステップと、
前記仮設定ステップで検出したN番目の肋骨が、第3の閾値より上方に位置するとき、該N番目の肋骨の直下の肋骨をN番目の肋骨とする第2修正ステップと、
左右に2分割された枝肉の肋骨領域の中心と前記第1の閾値との高さの差を比較し、該差が小さい方の枝肉で得られた肋骨の検出結果を採用する選択ステップとを行うことを特徴とする請求項1又は2に記載の枝肉の分割方法。
【請求項4】
前記中後躯体分割工程が、
枝肉の切断面を撮像する撮像ステップと、撮像した画像から前記第3切断点を検出する検出ステップと、検出した第3切断点を通る前記中後躯切断線に沿って後躯体から中躯体を切断する切断ステップと、からなることを特徴とする請求項1に記載の枝肉の分割方法。
【請求項5】
前記検出ステップが、撮像した画像の画像情報から背骨の関節部を検出する第1ステップと、撮像した画像から背骨の輪郭の変曲点を検出する第2ステップと、前記変曲点に最も近い背骨の関節部を選定し、該関節部の位置を前記第3切断点とする第3ステップとからなることを特徴とする請求項4に記載の枝肉の分割方法。
【請求項6】
背骨に沿って左右に2分割された家畜屠体の枝肉をもも側足首を介し懸垂する懸垂装置と、該懸垂装置で懸垂された枝肉を前躯体、中躯体及び後躯体に分割する切断装置とを備えた枝肉の分割装置において、
前躯体と中躯体とを分割する前中躯体分割部と、中躯体と後躯体とを分割する中後躯体分割部と、前記懸垂装置で懸垂された枝肉を前中躯体分割部及び中後躯体分割部を通り、かつ前中躯体分割部及び中後躯体分割部で一時停止させる搬送装置と、前中躯体分割部及び中後躯体分割部で枝肉の切断部位を教示する切断部位教示装置と、該切断部位教示装置から教示された切断部位に基づいて、前記切断装置の切断刃の動作を制御するコントローラと、を備え、
前記コントローラは、頭部側から数えて4番目と5番目の肋骨間又は5番目と6番目の肋骨間にある背骨部位を第2切断点とし、該第2切断点から胸骨側に向かって肋骨間を通り、肋骨先端から胸骨部位に交わる水平線と、第2切断点から背側輪郭へ向かう水平線とを前中躯体切断線とすると共に、前中躯体切断線が胸骨部位と交わる点を第1切断点とし、第1切断点から第2切断点に向かって前中躯体切断線に沿って前駆体を中躯体から切断し、背骨のもも側最先端関節部に第3切断点を設定し、寛骨を中躯体側に避けながら該第3切断点を通る中後躯切断線に沿って中躯体を後躯体から切断するように制御するものであることを特徴とする枝肉の分割装置。
【請求項7】
前記前中躯体分割部において、前記切断装置は、回転丸刃を備えた第1切断装置と、ナイフ状切断刃が装着された多関節アームを備えた第2切断装置とで構成され、
前記胸骨部位及び前記背骨部位を前記回転丸刃で切断した後、残りの肉部を前記前中躯体切断線に沿って前記ナイフ状切断刃で切断するように構成したことを特徴とする請求項6に記載の枝肉の分割装置。
【請求項8】
前記前中躯体分割部において、前記切断部位教示装置は、切断部位に向けてレーザ光を照射するレーザポインタと、該レーザポインタが装着され、レーザポインタを二次元方向任意位置に移動可能にするドラフタとで構成され、レーザ光が前記第1切断点及び第2切断点を照射したときのドラフタの位置情報を前記コントローラに入力するものであることを特徴とする請求項6又は7に記載の枝肉の分割装置。
【請求項9】
前記前中躯体分割部において、前記切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、該撮像装置で撮像された画像を表示し、タッチパネル機能で前記第1切断点及び第2切断点の位置情報を前記コントローラに入力する表示装置とで構成されていることを特徴とする請求項6又は7に記載の枝肉の分割装置。
【請求項10】
前記前中躯体分割部において、前記切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、枝肉切断面の肋骨領域に青色の可視光線を照射する青色光照射灯と、枝肉切断面に特定波長の可視光線を除かない白色可視光線を照射する白色光照射灯と、前記撮像装置に設けられ、青色以下の短波長の可視光線をカットし、緑色以上の長波長の可視光線のみを該撮像装置に入光させるロングパスフィルタとを備え、
前記コントローラは、青色の可視光線を肋骨領域に照射し、赤色から緑色の長波長の可視光線のみで撮像した画像と、特定波長の可視光線を除かない白色可視光線を枝肉切断面に照射して撮像した画像とから、肋骨領域及びカタ高さを検出する画像処理装置と、検出した肋骨領域及びカタ高さから頭部側からN番目の肋骨を求める演算手段とを備えていることを特徴とする請求項6又は7に記載の枝肉の分割装置。
【請求項11】
前記中後躯体分割部において、前記切断部位教示装置は、枝肉の切断面を撮像する撮像装置と、該撮像装置で撮像された画像の画像情報から背骨のもも側最先端関節部を検出する画像処理装置とで構成されていることを特徴とする請求項6に記載の枝肉の分割装置。
【図1】



【図2】

【図3】

【図4】

【図5】
【図6】
【図7】

【図8】

【図9】

【図10】

【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図19】

【図20】

【図21】
【図22】

【図23】
【図24】
【図25】

【図26】
【図27】

【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図18】
【公開番号】特開2013−31916(P2013−31916A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2012−145758(P2012−145758)
【出願日】平成24年6月28日(2012.6.28)
【出願人】(000148357)株式会社前川製作所 (267)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成24年6月28日(2012.6.28)
【出願人】(000148357)株式会社前川製作所 (267)
【Fターム(参考)】
[ Back to top ]