
柔軟変形物を含む物品の立て掛け装置及び立て掛け方法
【課題】立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で、これら各部材を立て掛けて保持できるようにする。
【解決手段】ダネッジ7(トレイ)上に載せた自動車用タイヤのホイール1を、柔軟変形物からなる緩衝材17を介して多段に積み重ねてワーク積載部16とし、この積載部から、ロボット9により、ホイール1をコンベア15に搬出するとともに、ダネッジ7及び緩衝材17を一緒に把持して立て掛け保持部59に立て掛けて仮置きする。仮置き時には、ダネッジ7及び緩衝材17は、下端をダネッジ下端支持部75に支持させる一方、上部を挟持部83の緩衝材押さえ機構85とアンチバック機構87とにより挟持して保持する。緩衝材押さえ機構85は緩衝材17をダネッジ7に向けて押し付け、アンチバック機構87は緩衝材押さえ機構85による押し付け方向の回転が規制されて保持状態を確保する。
【解決手段】ダネッジ7(トレイ)上に載せた自動車用タイヤのホイール1を、柔軟変形物からなる緩衝材17を介して多段に積み重ねてワーク積載部16とし、この積載部から、ロボット9により、ホイール1をコンベア15に搬出するとともに、ダネッジ7及び緩衝材17を一緒に把持して立て掛け保持部59に立て掛けて仮置きする。仮置き時には、ダネッジ7及び緩衝材17は、下端をダネッジ下端支持部75に支持させる一方、上部を挟持部83の緩衝材押さえ機構85とアンチバック機構87とにより挟持して保持する。緩衝材押さえ機構85は緩衝材17をダネッジ7に向けて押し付け、アンチバック機構87は緩衝材押さえ機構85による押し付け方向の回転が規制されて保持状態を確保する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で、これら板状部材及びシート状部材を立て掛けて保持する立て掛け装置及び立て掛け方法に関する。
【背景技術】
【0002】
ワークとして例えば自動車用タイヤのホイールを搬送する形態として、該ホイールを、ワーク受けとなる仕切り板を介して多段に積み重ねた状態とする技術が知られている(下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−145446号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記したホイールをワーク受けを介して多段に積み重ねる際には、タイヤを車両に装着したときのホイールの外部に露出する表面側が上面となるようにしてワーク受け上に載せる。この場合、ホイールの外部に露出する表面側は、上段のワーク受けに接触して傷が付く恐れがあるため、下段のホイールと上段のワーク受けとの間に緩衝材を配置することがある。緩衝材は、例えば樹脂で構成するなどして柔軟で軽量な部材とすることが求められる。
【0005】
このような柔軟で軽量な緩衝材を使用して多段に積み重ねた状態のホイールを、例えば多関節ロボットのハンドで把持して順次搬出する際には、1段目のホイールを搬出した後に、1段目のワーク受けとその下部の緩衝材を取り除く必要が生じる。
【0006】
この取り除いたワーク受けとその下部の緩衝材は、ワーク受け返却部に移送する前に、例えば一時的に複数組仮置きする場合がある。仮置きする際には、仮置き部の構成やスペースの都合上、立て掛けるようにして縦置きすることがある。縦置きする際には、ワーク受けについては、立て掛けたときに自立可能であるが、緩衝材は、柔軟変形物からなるシート状部材で構成されていることから、変形して立て掛けることができず、ワーク受け及び緩衝材の双方を立て掛けることはそのままでは困難となっている。
【0007】
そこで、本発明は、立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で、これら板状部材及びシート状部材を立て掛けて保持できるようにすることを目的としている。
【課題を解決するための手段】
【0008】
本発明は、立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で立て掛けて保持する立て掛け保持部を備え、この立て掛け保持部は、板状部材及びシート状部材を立て掛けた状態で、板状部材の下端を支持する板状部材支持部と、板状部材及びシート状部材の上部を挟持する挟持部とを有し、この挟持部は、シート状部材を板状部材に向けて弾性的に押し付けるシート状部材押さえ部と、このシート状部材押さえ部による押し付け方向の力を板状部材を介して受け、該押し付け方向の移動が規制されることで、シート状部材押さえ部との間で板状部材及びシート状部材を挟持する板状部材受け部とを備えていることを特徴とする。
【発明の効果】
【0009】
本発明によれば、板状部材支持部により板状部材の下端を支持するとともに、板状部材及びシート状部材の上部に対し、シート状部材押さえ部と板状部材受け部とで挟持するようにしたので、互いに重ね合わせた板状部材及びシート状部材を、特にシート状部材のずれ落ちを抑えつつ立て掛けて保持することができる。
【図面の簡単な説明】
【0010】
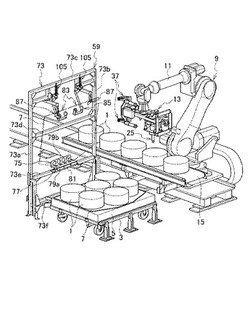
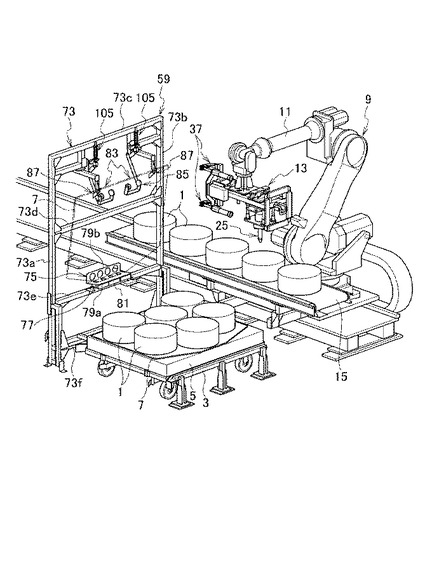
【図1】本発明の一実施形態に係わる立て掛け保持部を備える自動車用タイヤのホイールの搬出工程を示す斜視図である。
【図2】図1のホイールの搬出工程におけるワーク積載部でのホイールを複数載せるダネッジの平面図である。
【図3】図1のワーク積載部のホイールを多段に積載した状態を示す正面図である。
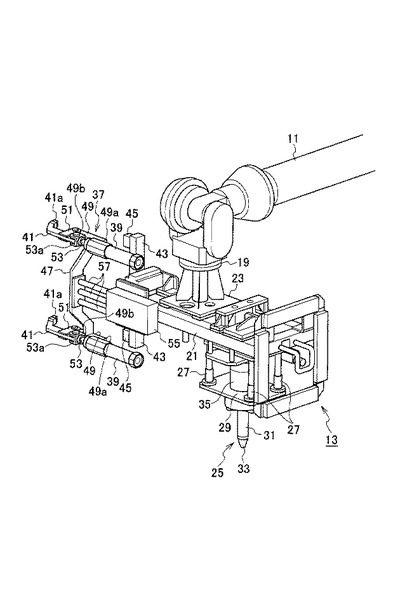
【図4】図1のホイールの搬出工程の多関節ロボットのハンドに設定してあるダネッジ把持部のアンクランプ状態を示す斜視図である。
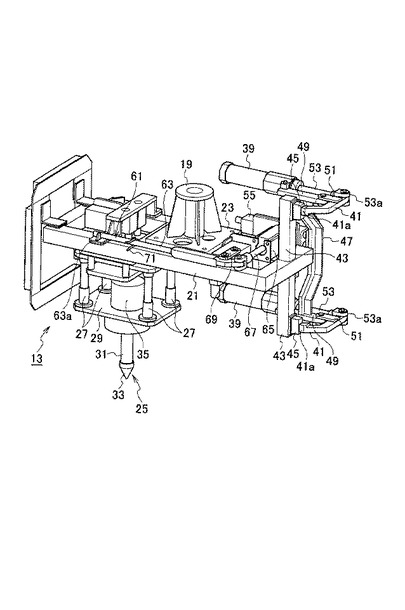
【図5】図4のハンドを図4の紙面裏側から見たクランプ状態を示す斜視図である。
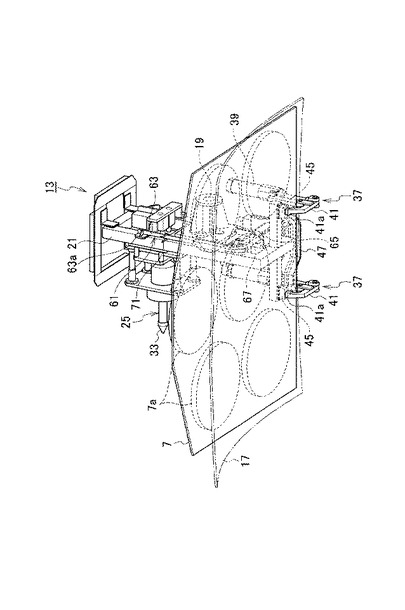
【図6】図4のハンドに設定してあるダネッジ把持部により、ダネッジ及び緩衝材を一緒に把持している状態を示す斜視図である。
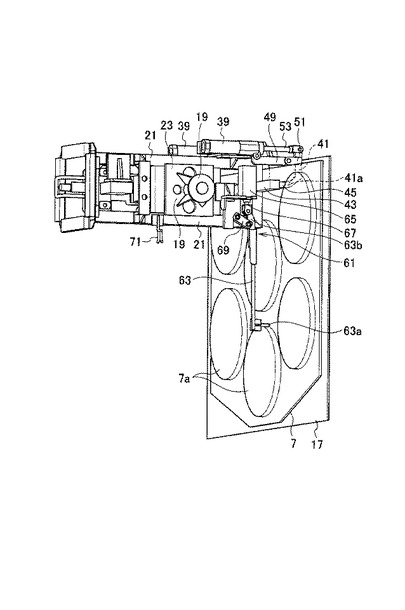
【図7】図6の把持状態からダネッジ及び緩衝材を縦置き状態とした斜視図である。
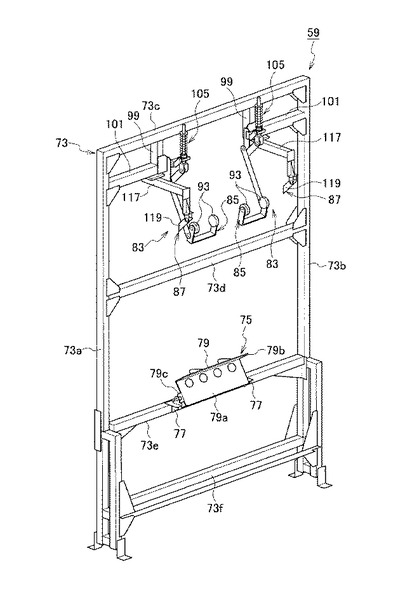
【図8】図1の立て掛け保持部の斜視図である。
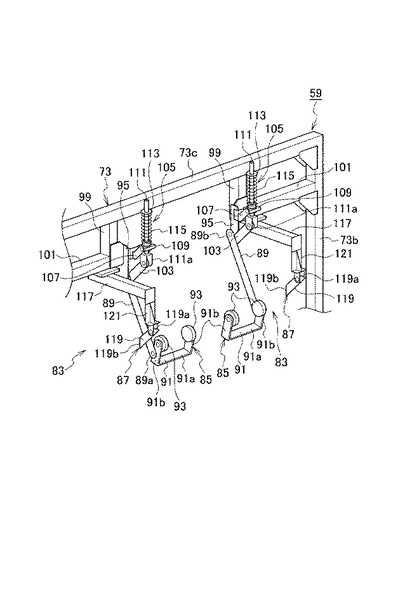
【図9】図8の挟持部周辺の拡大した斜視図である。
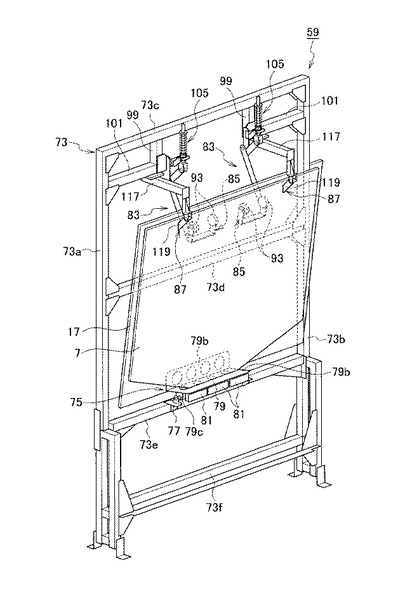
【図10】図8の立て掛け保持部にダネッジ(緩衝材は省略)を立て掛けた状態を示す斜視図である。
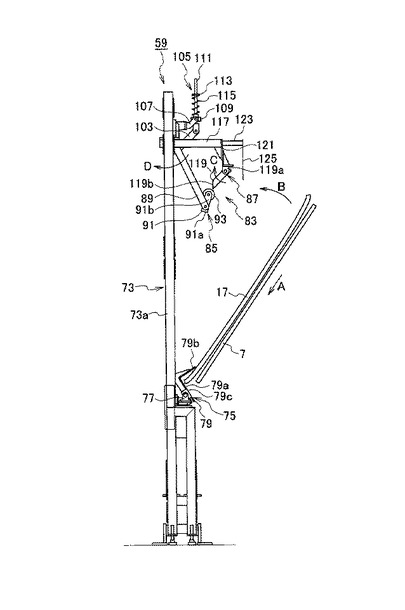
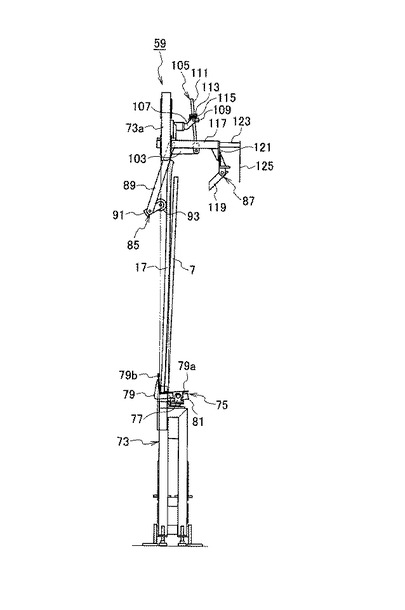
【図11】ダネッジ及び緩衝材を多関節ロボットにより立て掛け保持部に立て掛けて仮置きする際の作業手順を示す作用説明図で、ダネッジ及び緩衝材の下端をダネッジ下端支持部に当接させた状態を示す。
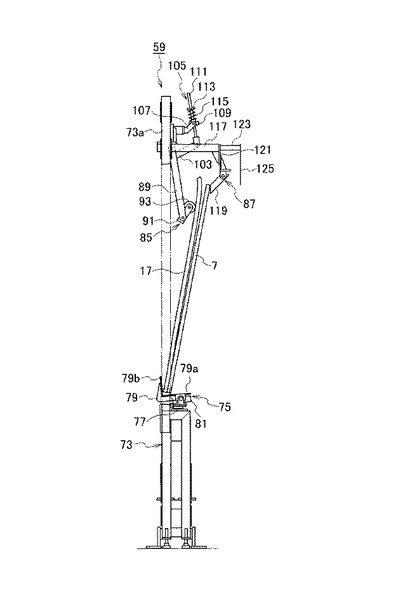
【図12】図11の状態から、ダネッジ及び緩衝材の上部を緩衝材押さえ機構とアンチバック機構との間に位置させた状態を示す作用説明図である。
【図13】図12の状態から、ダネッジ及び緩衝材を立て掛け保持部に保持させた状態を示す。
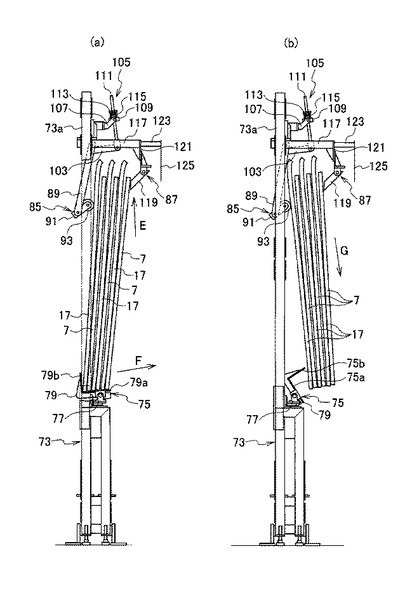
【図14】(a)は複数組のダネッジ及び緩衝材を立て掛け保持部に保持させた状態を示す作用説明図で、(b)は(a)の状態からダネッジ及び緩衝材を多関節ロボットにより搬出する際に上方に移動させた状態を示す作用説明図である。
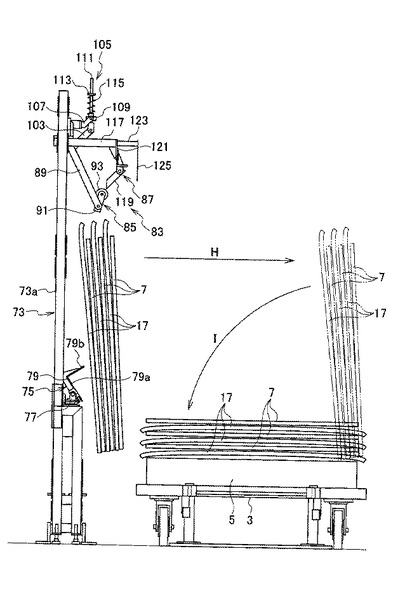
【図15】図11(b)の状態から複数組のダネッジ及び緩衝材を多関節ロボットにより台車上に載せる作業を示す作用説明図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態を図面に基づき説明する。
【0012】
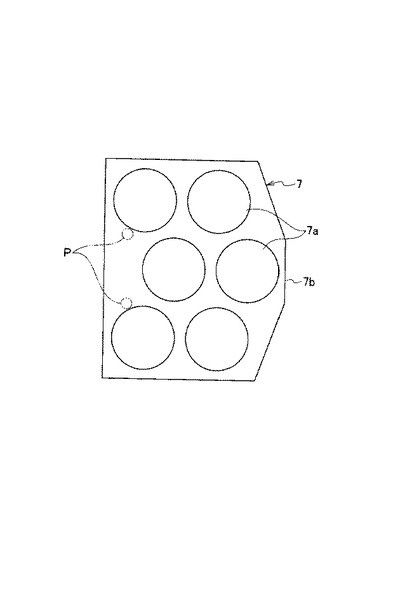
図1に示すように、ワークとして例えば自動車用タイヤのホイール1は、台車3上に配置してあるパレット5上に、ダネッジ(トレイ)7を介して複数(ここでは6個)載置してある。ダネッジ7は、立て掛けたときに自立可能な板状部材を構成しており、図2に示すように、平面視での形状を多角形として、6箇所の凸部7aを上面に形成している。この凸部7aを、ホイール1をダネッジ7に載せたときにホイール1の裏面の内側に入り込ませることで、ホイール1のダネッジ7に対する位置決めを行って位置ずれを抑えるようにしている。
【0013】
上記したダネッジ7上のホイール1を、多関節ロボット9のアーム11の先端に設けてあるハンド13によって、順次把持してコンベア15上に搬出する。
【0014】
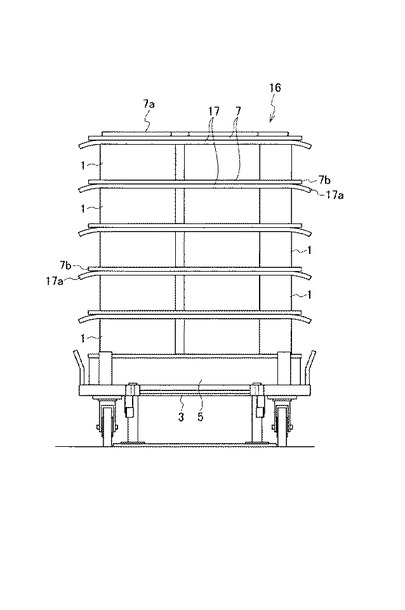
ホイール1のコンベア15への搬出前の台車3には、例えば図3に示すように、ホイール1を多段に積み重ね、ワーク積載部16を構成している。つまり、ワーク積載部16は、複数のホイール1とこの複数のホイール1を載せる1枚のダネッジ7とを1段として多段に積み重ねてある。ダネッジ7は、板状部材からなるワーク受けを構成しており、ホイール1を多段に積み重ねる際の仕切り板として機能する。
【0015】
ホイール1は、ダネッジ7に載せた状態では、該ホイール1を備えるタイヤを車両に装着したときに外側に露出する表面側が上面となるようにしている。このようなホイール1をダネッジ7とともに図3のように多段に積み重ねる際には、ホイール1の上段のダネッジ7との間には、柔軟変形物からなる緩衝材17を挟み込むようにして配置している。緩衝材17は、例えば高発泡ポリエチレンシートのような柔軟で軽量な樹脂で構成したシート状部材であり、上段のダネッジ7による下段のホイール1の表面に対する傷付きを抑えている。
【0016】
ダネッジ7は、図3に示すように、複数のホイール1を載せた状態で、外周縁7bがホイール1よりも外側に突出しており、この状態で緩衝材17の外周縁17aは、ダネッジ7の外周縁7bとほぼ重なる位置にあるか、あるいは僅かに外側に突出している。このとき、緩衝材17は柔軟性を備えていることからその外周縁17aは、図3に示すように下方に垂れ下がった状態となる。
【0017】
図1に示す関節ロボット9のハンド13は、図4に示すアーム取付部19に多関節ロボット9のアーム11の先端が着脱可能に取り付けられ、アーム取付部19は、大略長方形の枠状に形成してあるハンドフレーム21に取付板23を介して取り付けている。
【0018】
ハンドフレーム21のアーム取付部19と反対側のアーム取付部19からずれた位置には、ホイール1を把持するホイール把持部25を設けている。ホイール把持部25は、ハンドフレーム21からアーム取付部19と反対側に延びる4本の支柱27(1本は見えていない)の先端に支持板29を備え、この支持板29にホイール1を把持するホイール把持ロッド31を設けている。ホイール把持ロッド31の先端には、拡開部33を設ける一方、支持板29のホイール把持ロッド31と反対側には、拡開部33を拡開させるシリンダなどからなるアクチュエータ35を設置している。
【0019】
そして、上記したホイール把持ロッド31をホイール1の中心に形成してある図示しない孔に挿入した状態で、アクチュエータ35を駆動して拡開部33を拡開させることで、ホイール1を把持することができる。
【0020】
また、ハンドフレーム21のアーム取付部19を境にしてホイール把持部25と反対の先端側の側部には、図3に示してあるダネッジ7とその下部に接触する緩衝材17とを一緒に把持する把持具としてのダネッジ把持部37を設けている。
【0021】
ダネッジ把持部37は、一対のシリンダ39の駆動によって同期して回転作動する一対の可動アーム41と、ハンドフレーム21の先端部両側から一対のシリンダ39の配列方向(図4中で上下方向)に延びる固定アーム43の先端の受け部45とを備えている。固定アーム43の先端の受け部45と可動アーム41の先端に設けてある押さえ部41aとの間で、ダネッジ7及び緩衝材17を一緒に把持する。
【0022】
上記した固定アーム43に対しほぼ平行な状態で屈曲形状で延びる取付アーム47の図4中で上下両端に、ハンドフレーム21の長手方向に延びる取付ブラケット49を連結し、この取付ブラケット49の基端部49aに前記したシリンダ39を回動可能に取り付ける。一方、取付ブラケット49の先端部49bには、可動アーム41に固定してある取付片51の先端を回動可能に連結する。そして、可動アーム41の取付片51を境にして押さえ部41aと反対側の端部に、シリンダ39のピストンロッド53の連結部53aを回動可能に連結する。
【0023】
上記したシリンダ39や可動アーム41を両端に備える取付アーム47は、ハンドフレーム21の側部に固定してある可動アーム位置調整シリンダ55の3本のピストンロッド57の先端に連結している。すなわち、可動アーム位置調整シリンダ55を駆動することで、取付アーム47の両端に設けてあるシリンダ39や可動アーム41が一体となってハンドフレーム21の長手方向に移動し、把持(クランプ)状態での受け部45と可動アーム41先端の押さえ部41aとの間隔を調整できる。なお、図4は、可動アーム位置調整シリンダ55のピストンロッド57を前進駆動した状態を示している。
【0024】
図5は、多関節ロボット9のハンド13を図4の紙面裏側から見た斜視図であり、可動アーム位置調整シリンダ55のピストンロッド57を後退駆動し、かつ、シリンダ39のピストンロッド53を前進駆動させた把持状態である。ピストンロッド53を前進駆動することで、可動アーム41が取付ブラケット49と取付片51との連結部を中心として回動し、可動アーム41の押さえ部41aが受け部45に接近する。このとき、押さえ部41aと受け部45との間で、被把持物となる物品、本実施形態ではダネッジ7及び緩衝材17を一緒に把持することになる。
【0025】
前記した図3は、最上段のダネッジ7上に載せてあった図示しない複数のホイール全部を搬出した状態、もしくは、最上段のホイール1の表面の傷つきを抑えるために、緩衝材17及びダネッジ7を最上段のホイール1上に被せた状態である。この状態から、最上段にある複数のホイール1を搬出するために、最上部にあるダネッジ7及び緩衝材17を取り除く必要がある。
【0026】
このとき、前述したように、緩衝材17は柔軟性を備えていることからその外周縁17aは、図3に示すように下方に垂れ下がった状態となっている。この状態で、多関節ロボット9のハンド13に設けたダネッジ把持部37により、ダネッジ7とその下部にある緩衝材17とを一緒に把持する。この把持する際のダネッジ7及び緩衝材17に対する把持位置Pは、図2に示すように、凸部7aの近傍とする。
【0027】
図2での把持位置Pは、ダネッジ7の把持部側となる図中で左側の上下2箇所の角部に形成してある凸部7aの内側近傍としている。このような把持位置Pは、ダネッジ7と一緒に把持する緩衝材17についてみれば、ダネッジ7とその下部のホイール1とに挟まれて固定された状態の部位近傍を把持することになる。すなわち、把持するダネッジ7の下段のホイール1の近傍を把持することになる。
【0028】
その際、多関節ロボット9のアーム11を適宜回転駆動するなどしてハンド13を最上部のダネッジ7及び緩衝材17に側方から接近させ、図6に示すように、ダネッジ7及び緩衝材17をダネッジ把持部37により一緒に把持する。把持する際には、図4のアンクランプ状態で(但し、可動アーム位置調整シリンダ55のピストンロッド57は後退駆動した状態)、受け部45をダネッジ7の上面にほぼ接触する位置とした上で、受け部45に対して可動アーム41を回転させて、該可動アーム41の押さえ部41aを緩衝材17の下面に接近させる。
【0029】
すなわち、可動アーム41は、垂れ下がった状態の緩衝材17の外周縁17aを巻き込むようにして把持動作を行う。
【0030】
図6の把持状態では、柔軟変形物である緩衝材17は、ダネッジ把持部37による把持している位置から離れた先端側は、下方に垂れ下がった状態となっている。
【0031】
なお、図6でのダネッジ把持部37による把持位置は、図3では左側の側部に対応している。
【0032】
そして、このようにして把持したダネッジ7及び緩衝材17は、図7のようにダネッジ7及び緩衝材17を上下方向の縦置き状態として、図1に示してある立て掛け保持部59に複数組仮置きする。
【0033】
上記図7のようにダネッジ7及び緩衝材17を上下方向の縦置き状態で把持しているときは、ダネッジ押さえ機構61によってダネッジ7を押さえてその変形を抑える。ダネッジ押さえ機構61は、押さえアーム63の先端の押さえ部63aでダネッジ7を押さえる。
【0034】
押さえアーム63の図7中で上部の基端部63bは、図7中で上下方向に進退駆動するシリンダ65のピストンロッド67の先端に回転可能に連結している。シリンダ65は、ハンドフレーム21の固定アーム43に取り付けている。また、押さえアーム63の基端部63bのピストンロッド67への連結部よりも先端部63a側近傍には、連結リンク69の一端を回転可能に連結し、連結リンク69の他端をハンドフレーム21側に回転可能に連結している。
【0035】
図7の状態では、シリンダ65はピストンロッド67を後退駆動している。この状態からピストンロッド67を前進駆動すると、連結リンク69がハンドフレーム21側を支点として図7中で時計方向に回転するとともに、押さえアーム63が連結リンク69に対して図7中で時計方向に回転する。
【0036】
押さえアーム63は、上記の時計方向に回転によってハンドフレーム21の長手方向とほぼ平行な図5、図6の状態となり、この状態で、先端部63a近傍の押さえアーム63が、ハンドフレーム21に設けてある挟持部71に弾性的に挟持されて保持される。
【0037】
図8に拡大して示す立て掛け保持部59は、図1に示す台車3に対してコンベア15に沿う方向に隣接して配置してあり、上下方向に長い長方形状のフレーム73を備えている。このフレーム73は、左右両側にて上下方向に延びる縦フレーム73a,73bと、縦フレーム73a,73b相互間を上端部にて連結する上部横フレーム73cと、上部横フレーム73cの下方にて縦フレーム73a,73b相互間を連結する2本の中間横フレーム73d,73eと、下部横フレーム73fとを備えている。
【0038】
上部の中間横フレーム73dよりも下方に位置する中間横フレーム73eには、ダネッジ7及び緩衝材17を立て掛け保持部59に立て掛けて保持させたときに、ダネッジ7の下端を支持する板状部材支持部としてのダネッジ下端支持部75を設けている。
【0039】
このダネッジ下端支持部75は、中間横フレーム73eの長手方向の中心部に設置してあり、この長手方向に沿って設けてある一対の支持ブラケット77に、支持部本体79が中間横フレーム73eの長手方向に直交する面内で回転可能に支持されている。
【0040】
支持部本体79は、ダネッジ7の下端が当接して受ける当接受け面79aと、該当接受け面79aの図1における台車3と反対側の端部から図1、図10に示す支持姿勢にて上方に向けて屈曲する屈曲部79bとを備えている。当接受け面79aの左右両端には下方に向けて一部が屈曲する取付フランジ79cを形成し、この取付フランジ79cを支持ブラケット77に対して回転可能に支持させている。
【0041】
上記図1、図10の支持姿勢、すなわちダネッジ7を支持している支持状態での当接受け面79aは、ダネッジ7及び緩衝材17を立て掛ける際に投入する側(図1の台車3側)に対してその反対側が下方となるよう傾斜している。なお、図1では、緩衝材17を省略している。また、図1及び図10〜図15では、ダネッジ7の図6や図7に示してある凸部7aを省略している。
【0042】
当接受け面79aの屈曲部79bと反対側の端部下面には、図10に示すように錘81を取り付けてある。この錘81によって、図8に示す、ダネッジ7及び緩衝材17を支持していない非支持状態で、これらダネッジ7及び緩衝材17を立て掛ける際に投入する側に対向するよう傾斜する受け入れ待機姿勢を保持する。なお、受け入れ待機姿勢を保持については、錘81に代えてスプリングを用いてもよい。
【0043】
このようなダネッジ下端支持部75の上方の上部横フレーム73cには、ダネッジ下端支持部75により支持したダネッジ7及び緩衝材17の上部に対し、互いに対向する面を押し付けるようにして挟持する挟持部83を設けている。挟持部83は、上部横フレーム73cの長手方向に沿って左右に一対設けてある。この挟持部83は、緩衝材17をダネッジ7に向けて弾性的に押し付ける緩衝材押さえ機構85と、緩衝材押さえ機構85の押し付け方向の力を受けるとともに、緩衝材押さえ機構85に向けて回転移動可能なアンチバック機構87とを備えている。緩衝材押さえ機構85はシート状部材押さえ部を構成し、アンチバック機構87は板状部材受け部を構成している。
【0044】
上記した緩衝材押さえ機構85は、図9に拡大して示すように、上部を支点として回動可能な回動アーム89の先端にブラケット91を介して回転体としての一対のローラ93を回転可能に取り付けている。ブラケット91は、上部横フレーム73cの長手方向に延びる基部91aと、基部91aの延長方向両端から屈曲して上方に向けて立ち上がる一対のローラ取付部91bとを備えている。
【0045】
この一対のローラ取付部91bの先端の互いに対向する側にローラ93を回転可能に取り付けており、該一対のローラ取付部91bのうちの一方に、回動アーム89の先端部89aを連結固定している。このとき、一対のローラ取付部91bのうちの他方が、回動アーム89よりも上部横フレーム73cの長手方向中心側に位置している。
【0046】
回動アーム89は、上部に位置する基端部89bをフレーム73側の支持ブラケット95の下端に回転可能に連結している。支持ブラケット95は、上部横フレーム73cの下面から下方に延びる縦支持部材99の下端と、左右の縦フレーム73a,73bの内側面から互いに対向する方向に延びる横支持部材101の先端との交差部に取り付けてある。
【0047】
回動アーム89の基端部89b近傍には、連結アーム103の下部側の一端を連結固定し、連結アーム103の上部側の他端は、ローラ93を図10に示すダネッジ7に緩衝材17を介して弾性的に押し付けるための押し付け機構105に連結している。
【0048】
押し付け機構105は、支持ブラケット95の上部側面からダネッジ7及び緩衝材17を立て掛ける際に投入する側に向けて突出する支持アーム107を備え、この支持アーム107の先端に、上部横フレーム73cの長手方向を軸心として揺動回転可能な回動部材109に取り付けてある。
【0049】
回動部材109の中心部には上下方向に移動可能に貫通する可動ピン111を設け、可動ピン111の上部に設けたフランジ113と回動部材109との間には、可動ピン111を上方に向けて押し付けるスプリング115を介装している。そして、可動ピン111の回動部材109よりも下方に突出した取付部111aには、前記した連結アーム103の上部側の他端を回転可能に連結している。
【0050】
すなわち、緩衝材17及びダネッジ7を立て掛け保持部59に立て掛けずに、これら緩衝材17及びダネッジ7がローラ93を押し付けていない図8の状態では、可動ピン111がスプリング115により押し付けられて上方に向けて移動した状態となる。
【0051】
これに対し、緩衝材17及びダネッジ7を立て掛け保持部59に立て掛け、これら緩衝材17及びダネッジ7がローラ93を図10のように押し付けると、図8の状態から回動アーム89及び連結アーム103が一体となって回動し、可動ピン111がスプリング115に抗して下降した状態となる。
【0052】
一方、アンチバック機構87は、横支持部材101の縦支持部材99近傍の下面から台車3側に突出する支持部材117の先端に、可動片119を備える構成としている。支持部材117の先端には下方向けて延びる支持片121を取り付けており、この支持片121の下端に、上記した可動片119を、上部横フレーム73cの長手方向を軸心として回転可能に取り付けている。
【0053】
可動片119は、上端が台車3側で下端が立て掛け保持部59側となるよう傾斜した状態で、支持片121に取り付ける側の上方の端部を、可動片119の長手方向に対して傾斜して水平面となる上部傾斜面119aとしている。この上部傾斜面119aが、支持片121の下端の図示しない回転規制部となるストッパに当接した状態で、可動片119が、上記したような上端が台車3側で下端が立て掛け保持部59側となるよう傾斜した状態となる。
【0054】
また、可動片119は、上記した上端が台車3側で下端が立て掛け保持部59側となるよう傾斜した状態で、下方の端部を、その長手方向に対して傾斜して鉛直面となる下部傾斜面119bとしている。この下部傾斜面119bに、立て掛け状態のダネッジ7の緩衝材17と反対側の面が当接する。この当接時には、上部傾斜面119aが、前記した図示しないストッパに当接して可動片119のそれ以上の台車3側への回転が規制される。
【0055】
ここで、左右一対の挟持部83のうち、図8中で左側の一方の挟持部83の可動片119は回動アーム89の縦フレーム73a側近傍に位置し、図8中で右側の他方の挟持部83の可動片119は回動アーム89の縦フレーム73b側近傍に位置している。これにより、各可動片119は、回動アーム89近傍のローラ93に近接していることになる。
【0056】
また、図11に示すように、支持部材117の先端には、支持片121を介してさらに取付アーム123を取り付け、該取付アーム123の先端には、シート状のガイド125の上端を取り付けて下方に垂れ下がるようにしている。このガイド125は、柔軟性がありかつ表面が平滑な例えば樹脂製とし、少なくとも下端が可動片119の上部傾斜面119aよりも下方に位置している。
【0057】
なお、上記した取付アーム123及びシート状のガイド125は、図1、図8〜図10では省略している。
【0058】
次に、作用を説明する。図1に示すように、多関節ロボット9のホイール把持部25により台車3上のホイール1を把持してコンベア25に搬出し、1つのダネッジ7上の複数のホイール1のすべてを搬出したら、図3のようにダネッジ7が最上部に露出した状態となる。
【0059】
この状態で、最上部に露出したダネッジ7及び、その下段のホイール1との間に介装してある緩衝材17を、図6に示したように、多関節ロボット9のダネッジ把持部37により把持してから、立て掛け保持部59に仮置きする。
【0060】
この把持動作は、多関節ロボット9のハンド13を、ダネッジ把持部37が下部でホイール把持部25が上部であってハンドフレーム21の長手方向が上下方向となるように、かつ可動アーム41の開口側が、図1の立て掛け保持部59と台車3との間にてダネッジ7及び緩衝材17に対向する位置となるよう移動調整する。
【0061】
この状態で、最上部に露出したダネッジ7及びその下段のホイール1との間に介装してある緩衝材17を、多関節ロボット9のダネッジ把持部37により、固定アーム43の先端の受け部45と可動アーム41の先端の押さえ部41aとの間で一緒に把持する。
【0062】
把持した後は、図7に示すように、ダネッジ把持部37による把持位置側を上方とした状態で、ダネッジ7及び緩衝材17を上下方向の縦置き(立て掛け)状態とする。このとき、ダネッジ7が台車3側に位置し、緩衝材17が立て掛け保持部59側に位置している。
【0063】
また、このとき、図7に示すように、シリンダ65を駆動してそのピストンロッド67を、図6の前進位置から後退位置とし、これによりダネッジ押さえ機構61の押さえアーム63を、ハンドフレーム21の長手方向とほぼ直交する状態となるよう回転させる。この状態で押さえアーム63は、上下方向の縦置き状態となっているダネッジ7とほぼ平行となり、先端の押さえ部63aでダネッジ7を押さえることでダネッジ7の変形を抑える。
【0064】
このような図7の状態で、ダネッジ7及び緩衝材17を立て掛け保持部59に仮置きする。この仮置き作業の手順を図11〜図13に示す。なお、図11〜図13及び、以後に説明する図14、図15では多関節ロボット9のハンド13を省略している。
【0065】
まず、図11に示すように、ダネッジ7及び緩衝材17の下端を把持する側の上端よりも前方(図11中で左側)となるよう傾斜させた状態で、その下端をダネッジ下端支持部75に接近させる。このとき、ダネッジ下端支持部75は、図10に示す錘81によって、ダネッジ7及び緩衝材17を支持していない非支持状態(図8)で、これらダネッジ7及び緩衝材17を立て掛ける際に投入する側に対向するよう傾斜する受け入れ待機姿勢を保持している。
【0066】
この状態で、ダネッジ7及び緩衝材17の下端を当接受け面79aに当接させて押し付けると、柔軟変形物の緩衝材17は大きく変形するが、ダネッジ7は大きく変形することなく、当接受け面79aを押圧して後方に回転させ、図12の状態となる。
【0067】
このとき、ダネッジ7の当接受け面79aへの初期の当接位置は、屈曲部79bと支持ブラケット77に対する回転中心との間である。ダネッジ7及び緩衝材17は、当接受け面79aに当接した後は、当接受け面79a上を滑るようにして屈曲部79bまで達する。ここで、当接受け面79aは、上記したようにダネッジ7及び緩衝材17の下端を滑らせるので、滑りやすい平滑面とすることが望ましい。
【0068】
上記のようにダネッジ7及び緩衝材17の下端を当接受け面79aに対し滑らせつつ支持部本体79を後方へ回転させるのに並行して、多関節ロボット9による把持部側の上部を前方に移動させる。すなわち、図11における矢印Aで示す斜め前下方の移動と、矢印Bで示す上部の前方への回転移動とを連続もしくは同時に行い、このときダネッジ7及び緩衝材17はその下端を支点として上部が前方へ回転することになる。
【0069】
ダネッジ7及び緩衝材17の上部の矢印Bで示す前方への回転移動によって、該上部がアンチバック機構87の可動片119を押し付け、可動片119を図11における矢印Cで示す方向に回転させる。このとき、ダネッジ7及び緩衝材17は、可動片119に接触する前に、可動片119の上部傾斜面119aをカバーしているシート状のガイド125の下部に接触しガイド125を押しのけるようにして可動片119に達する。これにより、ダネッジ7及び緩衝材17が可動片119の上部傾斜面119aや支持片121に接触して引っ掛かるような不具合の発生を抑制することができる。
【0070】
上記したダネッジ7及び緩衝材17は、可動片119を押し付けつつ回転させる過程で、可動片119を通り越すと、その前方の緩衝材押さえ機構85のローラ93に緩衝材17側から接触する。
【0071】
この接触後、ダネッジ7及び緩衝材17をローラ93にさらに押し付けると、ローラ93を支持している回動アーム89が図11の矢印Dで示す方向に回転して図12の状態となる。回動アーム89が上記矢印Dで示す方向に回転すると、連結アーム103も回動アーム89と一体的に同方向に回転し、これに伴ない、可動ピン111がスプリング115の弾性力に抗して下方に移動することになる。可動ピン111が下方に移動するときには、回動部材109が可動ピン111とともに支持アーム107に対して図12中で反時計方向に揺動回転し、可動ピン111は上端が下端よりも図12中で左側のフレーム73側となるよう傾斜する。
【0072】
ダネッジ7及び緩衝材17が、可動片119を図12のように通り越した後は、可動片119はその自重によって上端を支点として図11の矢印Cとは逆方向に回転し、上部傾斜面119aが支持片121の図示しないストッパに当接して図12の状態に戻る。
【0073】
次に、図12のように、ダネッジ7及び緩衝材17が、ローラ93を押し付けて回動アーム89を回転させ、かつ、可動片119を通り越した後に、ダネッジ7及び緩衝材17を、図11の矢印Bとは逆方向に戻すよう移動させる。これにより、ローラ93が緩衝材17をダネッジ7に向けて押し付けた状態で、ダネッジ7が可動片119の下部傾斜面119bに当接する図13の状態となる。この状態でロボット9によるダネッジ7及び緩衝材17の把持を解除し、ロボット9は次の作業へ移行する。
【0074】
図13は、一組のダネッジ7及び緩衝材17を立て掛け保持部59に仮置きした状態であり、上記したような作業を繰り返し行うことで、図14(a)に示すように、複数組(ここでは三組)のダネッジ7及び緩衝材17を仮置きすることができる。但し、二組目以降のダネッジ7及び緩衝材17を立て掛ける際には、図13のようにダネッジ下端支持部75が支持状態となって当接受け面79aがほぼ水平状態となっているので、支持部本体79を回転させる必要はない。
【0075】
なお、上記のようにしてダネッジ7及び緩衝材17を多関節ロボット9のハンド13で把持する際には、そのダネッジ把持部37における各可動アーム41と受け部45とによる把持位置を、一対のローラ93相互間として各ローラ93により近い位置となるようにする。一対のローラ93相互間で各ローラ93により近い位置は、ローラ93による押し付けによってダネッジ7と緩衝材17とがより密着しているので、把持動作を確実に行うことができ、仮置き作業を効率よく行える。
【0076】
また、図13及び図14のように、ローラ93で緩衝材17を押し付けてダネッジ7を可動片119に当接させるときには、可動片119が、回動アーム89近傍のローラ93により近い位置にある。このため、回動アーム89と可動片119とによるダネッジ7及び緩衝材17に対する保持動作を、緩衝材17のダネッジ7に対する位置ずれを抑えてより確実に行うことができる。
【0077】
次に、ダネッジ7及び緩衝材17を、立て掛け保持部59に複数組仮置きした図14(a)の状態から、多関節ロボット9により一緒に把持して図15に示す台車3上のパレット5上に移送する。なお、図15の台車3は、図1に示してある台車3上のホイール1をすべて搬出した状態である。したがって、この台車3には、緩衝材17の上にダネッジ7を重ね合わせた状態のダネッジ7及び緩衝材17が、三組存在していたことになる。
【0078】
まず、図14の状態で、三組のダネッジ7及び緩衝材17の上部を多関節ロボット9のダネッジ把持部37により把持する。このときの把持位置は、ダネッジ7及び緩衝材17を立て掛け保持部59に立て掛けたときとほぼ同様に、一対のローラ93相互間とする。このとき、ダネッジ把持部37は、図4に示すように、可動アーム位置調整シリンダ55を駆動してそのピストンロッド57を進出移動させた状態とし、開放状態の可動アーム41の押さえ部41aと受け部45との間隔を広く確保しておく。この間隔を広くすることで、三組のダネッジ7及び緩衝材17の把持を容易なものとする。
【0079】
この状態で、ダネッジ把持部37を立て掛けた状態のダネッジ7及び緩衝材17の上部に移動させてこれら三組のダネッジ7及び緩衝材17を一緒に把持する。このとき、ダネッジ7及び緩衝材17を立て掛け保持部59に立て掛けたときと同様に、可動アーム41の押さえ部41aが緩衝材17側に位置し、受け部45がダネッジ7側に位置している。
【0080】
把持する際には、図4に示す一対のシリンダ39によりそのピストンロッド53を進出駆動してクランプ状態とした上で、可動アーム位置調整シリンダ55により3本のピストンロッド57を後退駆動する。これにより、ダネッジ7及び緩衝材17を可動アーム41の押さえ部41aと受け部45との間で把持する。
【0081】
この把持時においても、ダネッジ7及び緩衝材17を立て掛け保持部59に立て掛けるときと同様に、可動アーム41と受け部45とによる把持位置が、一対のローラ93相互間で各ローラ93に近い位置となっている。このため、ダネッジ7と緩衝材17とがより密着した部位を把持することになるので、把持動作を確実に行うことができる。
【0082】
図14の状態で三組のダネッジ7及び緩衝材17を多関節ロボット9により把持した後は、これらダネッジ7及び緩衝材17を、多関節ロボット9により、矢印Eで示す上方に移動させるとともに、下部を矢印Fで示す台車3側へ移動させて、図15の状態とする。このとき、ローラ93を多少前方(図11中で左側)に押し付けるようにする。この動作の過程で、ダネッジ下端支持部75の支持部本体79は、錘81の作用で図14(a)中で時計方向に回転して図14(b)の受け入れ待機姿勢に戻る。
【0083】
図14(b)の状態では、三組のダネッジ7及び緩衝材17は下部が図中で右側の台車3側に位置するように傾斜しており、この状態から矢印Gで示すようにその傾斜に沿って下方に移動させ、図15に示すように可動片119や回動アーム89よりも下方に位置させる。
【0084】
その後は、これら三組のダネッジ7及び緩衝材17を、多関節ロボット9により、矢印Hで示すように、立て掛け保持部59から離れる方向にほぼ平行移動させ、台車3の立て掛け保持部59と反対側の端部付近に位置させる。
【0085】
続いて、矢印Iで示すように、多関節ロボット9により、ダネッジ7及び緩衝材17の上部を、下端を支点として前方の立て掛け保持部59側に向けて回転させるようにしてパレット5上に載せる。このとき、柔軟性のある緩衝材17が下部側となるので、矢印Iの方向に移動させる際には、多関節ロボット9により、ダネッジ7及び緩衝材17の下部を一旦立て掛け保持部59から離れる図15中で右方向に振るようにする。これにより、緩衝材17を慣性によりダネッジ7に密着させた状態とする。その結果、ダネッジ7及び緩衝材17をパレット5上に載せるときに、柔軟性のある緩衝材17が折れ曲がるなどの変形を抑えた状態とすることができる。
【0086】
台車3上のパレット5に使用済みのダネッジ7及び緩衝材17を載せたら、この台車3を立て掛け保持部59から離反移動させ、別途ホイール1を多段に積み重ねてある台車3を再度立て掛け保持部59の近傍に移動させて、上記と同様の作業を繰り返す。
【0087】
以上説明したように、本実施形態によれば、ダネッジ下端支持部75によりダネッジ7の下端を支持するとともに、ダネッジ7及び緩衝材17の上部に対し、緩衝材押さえ機構85が緩衝材17を弾性的に押し付け、この押し付け力をアンチバック機構87がダネッジ7を介して受けることで、ダネッジ7及び緩衝材17を互いに対向する面を押し付けるようにして挟持する。
【0088】
このため、立て掛けたときに自立可能なダネッジ7と、柔軟変形物からなる緩衝材17とを互いに重ね合わせた状態で、これらダネッジ7及び緩衝材17を、特に緩衝材17のずれ落ちを抑えながら立て掛けて保持することができる。
【0089】
その際、アンチバック機構87の可動片119は、該アンチバック機構87と緩衝材押さえ機構85とによってダネッジ7及び緩衝材17を挟持した状態で、緩衝材押さえ機構85による押し付け方向の回転が規制されている。このため、別途アクチュエータや複雑な制御を必要とすることなく、ダネッジ7及び緩衝材17を立て掛けた状態での保持をより簡素な構成で達成することができる。
【0090】
また、本実施形態によれば、ダネッジ下端支持部75は、ダネッジ7の下端が当接して受ける当接受け面79aを備え、この当接受け面79aは、ダネッジ7を支持していない非支持状態で、ダネッジ7及び緩衝材17を立て掛ける際に投入する側に対向するよう傾斜する受け入れ待機姿勢を保持し、この受け入れ待機姿勢に対して上端が下方に向かう方向に回転可能である。
【0091】
このため、ダネッジ7及び緩衝材17の投入時には、その下端を受け入れ待機姿勢の当接受け面79aに当接させることで、位置合わせが容易となり、搬出時にも当接受け面79aが立ち上がった状態の受け入れ待機姿勢となるので、容易に取り出すことができる。
【0092】
また、本実施形態によれば、ダネッジ下端支持部75は、支持姿勢で上方に向けて屈曲する屈曲部79bを有し、当接受け面79aは、ダネッジ7を支持している支持状態で、ダネッジ7及び緩衝材17を立て掛ける際に投入する側に対してその反対側が下方となるよう傾斜している。このため、ダネッジ7及び緩衝材17の支持状態が安定化する。
【0093】
また、本実施形態によれば、挟持部83の緩衝材押さえ機構85は、上部を支点として回動可能な回動アーム89の先端に緩衝材17に接触しつつ回転するローラ93を設けている。このため、ダネッジ7及び緩衝材17を立て掛ける際に回動アーム89が回転してその先端が緩衝材17に対して移動しても、ローラ93の回転によって緩衝材17の位置ずれを抑えることができる。
【0094】
また、本実施形態によれば、立て掛け保持部59は、ワーク積載部16からホイール1を順次搬出するにあたり、ダネッジ7とその下部に位置する緩衝材17とをワーク積載部16から取り除き、この取り除いたダネッジ7及び緩衝材17を仮置きのために立て掛けて保持する。
【0095】
このため、ワーク積載部16からのホイール1の搬出工程で使用する使用済みのダネッジ7及び緩衝材17の仮置き作業を効率よく行うことができる。
【0096】
さらに、本実施形態によれば、ダネッジ7及び緩衝材17の上部を、緩衝材17側からアンチバック機構87に押し付けつつ該アンチバック機構87を前方に向けて移動させて、ダネッジ7及び緩衝材17を、アンチバック機構87と緩衝材押さえ機構85との間に介在させて保持させる。
【0097】
このため、ダネッジ7及び緩衝材17をアンチバック機構87と緩衝材押さえ機構85との間に介在させるときには、単にアンチバック機構87をダネッジ7及び緩衝材17によって押し付けて移動させるだけでよいので、立て掛け作業を容易に行うことができる。
【0098】
なお、本実施形態では、板状部材としてホイール1を載せるダネッジ7とし、柔軟変形物からなるシート状部材を緩衝材17としているが、他の物品であっても構わない。
【符号の説明】
【0099】
1 自動車用タイヤのホイール(ワーク)
7 ダネッジ(ワーク受け、板状部材)
16 ワーク積載部
17 緩衝材(シート状部材)
37 ダネッジ把持部(把持具)
59 立て掛け保持部
75 ダネッジ下端支持部(板状部材支持部)
79a ダネッジ下端支持部の当接受け面
79b ダネッジ下端支持部の屈曲部
83 挟持部
85 緩衝材押さえ機構(シート状部材押さえ部)
87 アンチバック機構(板状部材受け部)
89 緩衝材押さえ機構の回動アーム(アーム)
93 緩衝材押さえ機構のローラ(回転体)
【技術分野】
【0001】
本発明は、立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で、これら板状部材及びシート状部材を立て掛けて保持する立て掛け装置及び立て掛け方法に関する。
【背景技術】
【0002】
ワークとして例えば自動車用タイヤのホイールを搬送する形態として、該ホイールを、ワーク受けとなる仕切り板を介して多段に積み重ねた状態とする技術が知られている(下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−145446号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記したホイールをワーク受けを介して多段に積み重ねる際には、タイヤを車両に装着したときのホイールの外部に露出する表面側が上面となるようにしてワーク受け上に載せる。この場合、ホイールの外部に露出する表面側は、上段のワーク受けに接触して傷が付く恐れがあるため、下段のホイールと上段のワーク受けとの間に緩衝材を配置することがある。緩衝材は、例えば樹脂で構成するなどして柔軟で軽量な部材とすることが求められる。
【0005】
このような柔軟で軽量な緩衝材を使用して多段に積み重ねた状態のホイールを、例えば多関節ロボットのハンドで把持して順次搬出する際には、1段目のホイールを搬出した後に、1段目のワーク受けとその下部の緩衝材を取り除く必要が生じる。
【0006】
この取り除いたワーク受けとその下部の緩衝材は、ワーク受け返却部に移送する前に、例えば一時的に複数組仮置きする場合がある。仮置きする際には、仮置き部の構成やスペースの都合上、立て掛けるようにして縦置きすることがある。縦置きする際には、ワーク受けについては、立て掛けたときに自立可能であるが、緩衝材は、柔軟変形物からなるシート状部材で構成されていることから、変形して立て掛けることができず、ワーク受け及び緩衝材の双方を立て掛けることはそのままでは困難となっている。
【0007】
そこで、本発明は、立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で、これら板状部材及びシート状部材を立て掛けて保持できるようにすることを目的としている。
【課題を解決するための手段】
【0008】
本発明は、立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で立て掛けて保持する立て掛け保持部を備え、この立て掛け保持部は、板状部材及びシート状部材を立て掛けた状態で、板状部材の下端を支持する板状部材支持部と、板状部材及びシート状部材の上部を挟持する挟持部とを有し、この挟持部は、シート状部材を板状部材に向けて弾性的に押し付けるシート状部材押さえ部と、このシート状部材押さえ部による押し付け方向の力を板状部材を介して受け、該押し付け方向の移動が規制されることで、シート状部材押さえ部との間で板状部材及びシート状部材を挟持する板状部材受け部とを備えていることを特徴とする。
【発明の効果】
【0009】
本発明によれば、板状部材支持部により板状部材の下端を支持するとともに、板状部材及びシート状部材の上部に対し、シート状部材押さえ部と板状部材受け部とで挟持するようにしたので、互いに重ね合わせた板状部材及びシート状部材を、特にシート状部材のずれ落ちを抑えつつ立て掛けて保持することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施形態に係わる立て掛け保持部を備える自動車用タイヤのホイールの搬出工程を示す斜視図である。
【図2】図1のホイールの搬出工程におけるワーク積載部でのホイールを複数載せるダネッジの平面図である。
【図3】図1のワーク積載部のホイールを多段に積載した状態を示す正面図である。
【図4】図1のホイールの搬出工程の多関節ロボットのハンドに設定してあるダネッジ把持部のアンクランプ状態を示す斜視図である。
【図5】図4のハンドを図4の紙面裏側から見たクランプ状態を示す斜視図である。
【図6】図4のハンドに設定してあるダネッジ把持部により、ダネッジ及び緩衝材を一緒に把持している状態を示す斜視図である。
【図7】図6の把持状態からダネッジ及び緩衝材を縦置き状態とした斜視図である。
【図8】図1の立て掛け保持部の斜視図である。
【図9】図8の挟持部周辺の拡大した斜視図である。
【図10】図8の立て掛け保持部にダネッジ(緩衝材は省略)を立て掛けた状態を示す斜視図である。
【図11】ダネッジ及び緩衝材を多関節ロボットにより立て掛け保持部に立て掛けて仮置きする際の作業手順を示す作用説明図で、ダネッジ及び緩衝材の下端をダネッジ下端支持部に当接させた状態を示す。
【図12】図11の状態から、ダネッジ及び緩衝材の上部を緩衝材押さえ機構とアンチバック機構との間に位置させた状態を示す作用説明図である。
【図13】図12の状態から、ダネッジ及び緩衝材を立て掛け保持部に保持させた状態を示す。
【図14】(a)は複数組のダネッジ及び緩衝材を立て掛け保持部に保持させた状態を示す作用説明図で、(b)は(a)の状態からダネッジ及び緩衝材を多関節ロボットにより搬出する際に上方に移動させた状態を示す作用説明図である。
【図15】図11(b)の状態から複数組のダネッジ及び緩衝材を多関節ロボットにより台車上に載せる作業を示す作用説明図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施の形態を図面に基づき説明する。
【0012】
図1に示すように、ワークとして例えば自動車用タイヤのホイール1は、台車3上に配置してあるパレット5上に、ダネッジ(トレイ)7を介して複数(ここでは6個)載置してある。ダネッジ7は、立て掛けたときに自立可能な板状部材を構成しており、図2に示すように、平面視での形状を多角形として、6箇所の凸部7aを上面に形成している。この凸部7aを、ホイール1をダネッジ7に載せたときにホイール1の裏面の内側に入り込ませることで、ホイール1のダネッジ7に対する位置決めを行って位置ずれを抑えるようにしている。
【0013】
上記したダネッジ7上のホイール1を、多関節ロボット9のアーム11の先端に設けてあるハンド13によって、順次把持してコンベア15上に搬出する。
【0014】
ホイール1のコンベア15への搬出前の台車3には、例えば図3に示すように、ホイール1を多段に積み重ね、ワーク積載部16を構成している。つまり、ワーク積載部16は、複数のホイール1とこの複数のホイール1を載せる1枚のダネッジ7とを1段として多段に積み重ねてある。ダネッジ7は、板状部材からなるワーク受けを構成しており、ホイール1を多段に積み重ねる際の仕切り板として機能する。
【0015】
ホイール1は、ダネッジ7に載せた状態では、該ホイール1を備えるタイヤを車両に装着したときに外側に露出する表面側が上面となるようにしている。このようなホイール1をダネッジ7とともに図3のように多段に積み重ねる際には、ホイール1の上段のダネッジ7との間には、柔軟変形物からなる緩衝材17を挟み込むようにして配置している。緩衝材17は、例えば高発泡ポリエチレンシートのような柔軟で軽量な樹脂で構成したシート状部材であり、上段のダネッジ7による下段のホイール1の表面に対する傷付きを抑えている。
【0016】
ダネッジ7は、図3に示すように、複数のホイール1を載せた状態で、外周縁7bがホイール1よりも外側に突出しており、この状態で緩衝材17の外周縁17aは、ダネッジ7の外周縁7bとほぼ重なる位置にあるか、あるいは僅かに外側に突出している。このとき、緩衝材17は柔軟性を備えていることからその外周縁17aは、図3に示すように下方に垂れ下がった状態となる。
【0017】
図1に示す関節ロボット9のハンド13は、図4に示すアーム取付部19に多関節ロボット9のアーム11の先端が着脱可能に取り付けられ、アーム取付部19は、大略長方形の枠状に形成してあるハンドフレーム21に取付板23を介して取り付けている。
【0018】
ハンドフレーム21のアーム取付部19と反対側のアーム取付部19からずれた位置には、ホイール1を把持するホイール把持部25を設けている。ホイール把持部25は、ハンドフレーム21からアーム取付部19と反対側に延びる4本の支柱27(1本は見えていない)の先端に支持板29を備え、この支持板29にホイール1を把持するホイール把持ロッド31を設けている。ホイール把持ロッド31の先端には、拡開部33を設ける一方、支持板29のホイール把持ロッド31と反対側には、拡開部33を拡開させるシリンダなどからなるアクチュエータ35を設置している。
【0019】
そして、上記したホイール把持ロッド31をホイール1の中心に形成してある図示しない孔に挿入した状態で、アクチュエータ35を駆動して拡開部33を拡開させることで、ホイール1を把持することができる。
【0020】
また、ハンドフレーム21のアーム取付部19を境にしてホイール把持部25と反対の先端側の側部には、図3に示してあるダネッジ7とその下部に接触する緩衝材17とを一緒に把持する把持具としてのダネッジ把持部37を設けている。
【0021】
ダネッジ把持部37は、一対のシリンダ39の駆動によって同期して回転作動する一対の可動アーム41と、ハンドフレーム21の先端部両側から一対のシリンダ39の配列方向(図4中で上下方向)に延びる固定アーム43の先端の受け部45とを備えている。固定アーム43の先端の受け部45と可動アーム41の先端に設けてある押さえ部41aとの間で、ダネッジ7及び緩衝材17を一緒に把持する。
【0022】
上記した固定アーム43に対しほぼ平行な状態で屈曲形状で延びる取付アーム47の図4中で上下両端に、ハンドフレーム21の長手方向に延びる取付ブラケット49を連結し、この取付ブラケット49の基端部49aに前記したシリンダ39を回動可能に取り付ける。一方、取付ブラケット49の先端部49bには、可動アーム41に固定してある取付片51の先端を回動可能に連結する。そして、可動アーム41の取付片51を境にして押さえ部41aと反対側の端部に、シリンダ39のピストンロッド53の連結部53aを回動可能に連結する。
【0023】
上記したシリンダ39や可動アーム41を両端に備える取付アーム47は、ハンドフレーム21の側部に固定してある可動アーム位置調整シリンダ55の3本のピストンロッド57の先端に連結している。すなわち、可動アーム位置調整シリンダ55を駆動することで、取付アーム47の両端に設けてあるシリンダ39や可動アーム41が一体となってハンドフレーム21の長手方向に移動し、把持(クランプ)状態での受け部45と可動アーム41先端の押さえ部41aとの間隔を調整できる。なお、図4は、可動アーム位置調整シリンダ55のピストンロッド57を前進駆動した状態を示している。
【0024】
図5は、多関節ロボット9のハンド13を図4の紙面裏側から見た斜視図であり、可動アーム位置調整シリンダ55のピストンロッド57を後退駆動し、かつ、シリンダ39のピストンロッド53を前進駆動させた把持状態である。ピストンロッド53を前進駆動することで、可動アーム41が取付ブラケット49と取付片51との連結部を中心として回動し、可動アーム41の押さえ部41aが受け部45に接近する。このとき、押さえ部41aと受け部45との間で、被把持物となる物品、本実施形態ではダネッジ7及び緩衝材17を一緒に把持することになる。
【0025】
前記した図3は、最上段のダネッジ7上に載せてあった図示しない複数のホイール全部を搬出した状態、もしくは、最上段のホイール1の表面の傷つきを抑えるために、緩衝材17及びダネッジ7を最上段のホイール1上に被せた状態である。この状態から、最上段にある複数のホイール1を搬出するために、最上部にあるダネッジ7及び緩衝材17を取り除く必要がある。
【0026】
このとき、前述したように、緩衝材17は柔軟性を備えていることからその外周縁17aは、図3に示すように下方に垂れ下がった状態となっている。この状態で、多関節ロボット9のハンド13に設けたダネッジ把持部37により、ダネッジ7とその下部にある緩衝材17とを一緒に把持する。この把持する際のダネッジ7及び緩衝材17に対する把持位置Pは、図2に示すように、凸部7aの近傍とする。
【0027】
図2での把持位置Pは、ダネッジ7の把持部側となる図中で左側の上下2箇所の角部に形成してある凸部7aの内側近傍としている。このような把持位置Pは、ダネッジ7と一緒に把持する緩衝材17についてみれば、ダネッジ7とその下部のホイール1とに挟まれて固定された状態の部位近傍を把持することになる。すなわち、把持するダネッジ7の下段のホイール1の近傍を把持することになる。
【0028】
その際、多関節ロボット9のアーム11を適宜回転駆動するなどしてハンド13を最上部のダネッジ7及び緩衝材17に側方から接近させ、図6に示すように、ダネッジ7及び緩衝材17をダネッジ把持部37により一緒に把持する。把持する際には、図4のアンクランプ状態で(但し、可動アーム位置調整シリンダ55のピストンロッド57は後退駆動した状態)、受け部45をダネッジ7の上面にほぼ接触する位置とした上で、受け部45に対して可動アーム41を回転させて、該可動アーム41の押さえ部41aを緩衝材17の下面に接近させる。
【0029】
すなわち、可動アーム41は、垂れ下がった状態の緩衝材17の外周縁17aを巻き込むようにして把持動作を行う。
【0030】
図6の把持状態では、柔軟変形物である緩衝材17は、ダネッジ把持部37による把持している位置から離れた先端側は、下方に垂れ下がった状態となっている。
【0031】
なお、図6でのダネッジ把持部37による把持位置は、図3では左側の側部に対応している。
【0032】
そして、このようにして把持したダネッジ7及び緩衝材17は、図7のようにダネッジ7及び緩衝材17を上下方向の縦置き状態として、図1に示してある立て掛け保持部59に複数組仮置きする。
【0033】
上記図7のようにダネッジ7及び緩衝材17を上下方向の縦置き状態で把持しているときは、ダネッジ押さえ機構61によってダネッジ7を押さえてその変形を抑える。ダネッジ押さえ機構61は、押さえアーム63の先端の押さえ部63aでダネッジ7を押さえる。
【0034】
押さえアーム63の図7中で上部の基端部63bは、図7中で上下方向に進退駆動するシリンダ65のピストンロッド67の先端に回転可能に連結している。シリンダ65は、ハンドフレーム21の固定アーム43に取り付けている。また、押さえアーム63の基端部63bのピストンロッド67への連結部よりも先端部63a側近傍には、連結リンク69の一端を回転可能に連結し、連結リンク69の他端をハンドフレーム21側に回転可能に連結している。
【0035】
図7の状態では、シリンダ65はピストンロッド67を後退駆動している。この状態からピストンロッド67を前進駆動すると、連結リンク69がハンドフレーム21側を支点として図7中で時計方向に回転するとともに、押さえアーム63が連結リンク69に対して図7中で時計方向に回転する。
【0036】
押さえアーム63は、上記の時計方向に回転によってハンドフレーム21の長手方向とほぼ平行な図5、図6の状態となり、この状態で、先端部63a近傍の押さえアーム63が、ハンドフレーム21に設けてある挟持部71に弾性的に挟持されて保持される。
【0037】
図8に拡大して示す立て掛け保持部59は、図1に示す台車3に対してコンベア15に沿う方向に隣接して配置してあり、上下方向に長い長方形状のフレーム73を備えている。このフレーム73は、左右両側にて上下方向に延びる縦フレーム73a,73bと、縦フレーム73a,73b相互間を上端部にて連結する上部横フレーム73cと、上部横フレーム73cの下方にて縦フレーム73a,73b相互間を連結する2本の中間横フレーム73d,73eと、下部横フレーム73fとを備えている。
【0038】
上部の中間横フレーム73dよりも下方に位置する中間横フレーム73eには、ダネッジ7及び緩衝材17を立て掛け保持部59に立て掛けて保持させたときに、ダネッジ7の下端を支持する板状部材支持部としてのダネッジ下端支持部75を設けている。
【0039】
このダネッジ下端支持部75は、中間横フレーム73eの長手方向の中心部に設置してあり、この長手方向に沿って設けてある一対の支持ブラケット77に、支持部本体79が中間横フレーム73eの長手方向に直交する面内で回転可能に支持されている。
【0040】
支持部本体79は、ダネッジ7の下端が当接して受ける当接受け面79aと、該当接受け面79aの図1における台車3と反対側の端部から図1、図10に示す支持姿勢にて上方に向けて屈曲する屈曲部79bとを備えている。当接受け面79aの左右両端には下方に向けて一部が屈曲する取付フランジ79cを形成し、この取付フランジ79cを支持ブラケット77に対して回転可能に支持させている。
【0041】
上記図1、図10の支持姿勢、すなわちダネッジ7を支持している支持状態での当接受け面79aは、ダネッジ7及び緩衝材17を立て掛ける際に投入する側(図1の台車3側)に対してその反対側が下方となるよう傾斜している。なお、図1では、緩衝材17を省略している。また、図1及び図10〜図15では、ダネッジ7の図6や図7に示してある凸部7aを省略している。
【0042】
当接受け面79aの屈曲部79bと反対側の端部下面には、図10に示すように錘81を取り付けてある。この錘81によって、図8に示す、ダネッジ7及び緩衝材17を支持していない非支持状態で、これらダネッジ7及び緩衝材17を立て掛ける際に投入する側に対向するよう傾斜する受け入れ待機姿勢を保持する。なお、受け入れ待機姿勢を保持については、錘81に代えてスプリングを用いてもよい。
【0043】
このようなダネッジ下端支持部75の上方の上部横フレーム73cには、ダネッジ下端支持部75により支持したダネッジ7及び緩衝材17の上部に対し、互いに対向する面を押し付けるようにして挟持する挟持部83を設けている。挟持部83は、上部横フレーム73cの長手方向に沿って左右に一対設けてある。この挟持部83は、緩衝材17をダネッジ7に向けて弾性的に押し付ける緩衝材押さえ機構85と、緩衝材押さえ機構85の押し付け方向の力を受けるとともに、緩衝材押さえ機構85に向けて回転移動可能なアンチバック機構87とを備えている。緩衝材押さえ機構85はシート状部材押さえ部を構成し、アンチバック機構87は板状部材受け部を構成している。
【0044】
上記した緩衝材押さえ機構85は、図9に拡大して示すように、上部を支点として回動可能な回動アーム89の先端にブラケット91を介して回転体としての一対のローラ93を回転可能に取り付けている。ブラケット91は、上部横フレーム73cの長手方向に延びる基部91aと、基部91aの延長方向両端から屈曲して上方に向けて立ち上がる一対のローラ取付部91bとを備えている。
【0045】
この一対のローラ取付部91bの先端の互いに対向する側にローラ93を回転可能に取り付けており、該一対のローラ取付部91bのうちの一方に、回動アーム89の先端部89aを連結固定している。このとき、一対のローラ取付部91bのうちの他方が、回動アーム89よりも上部横フレーム73cの長手方向中心側に位置している。
【0046】
回動アーム89は、上部に位置する基端部89bをフレーム73側の支持ブラケット95の下端に回転可能に連結している。支持ブラケット95は、上部横フレーム73cの下面から下方に延びる縦支持部材99の下端と、左右の縦フレーム73a,73bの内側面から互いに対向する方向に延びる横支持部材101の先端との交差部に取り付けてある。
【0047】
回動アーム89の基端部89b近傍には、連結アーム103の下部側の一端を連結固定し、連結アーム103の上部側の他端は、ローラ93を図10に示すダネッジ7に緩衝材17を介して弾性的に押し付けるための押し付け機構105に連結している。
【0048】
押し付け機構105は、支持ブラケット95の上部側面からダネッジ7及び緩衝材17を立て掛ける際に投入する側に向けて突出する支持アーム107を備え、この支持アーム107の先端に、上部横フレーム73cの長手方向を軸心として揺動回転可能な回動部材109に取り付けてある。
【0049】
回動部材109の中心部には上下方向に移動可能に貫通する可動ピン111を設け、可動ピン111の上部に設けたフランジ113と回動部材109との間には、可動ピン111を上方に向けて押し付けるスプリング115を介装している。そして、可動ピン111の回動部材109よりも下方に突出した取付部111aには、前記した連結アーム103の上部側の他端を回転可能に連結している。
【0050】
すなわち、緩衝材17及びダネッジ7を立て掛け保持部59に立て掛けずに、これら緩衝材17及びダネッジ7がローラ93を押し付けていない図8の状態では、可動ピン111がスプリング115により押し付けられて上方に向けて移動した状態となる。
【0051】
これに対し、緩衝材17及びダネッジ7を立て掛け保持部59に立て掛け、これら緩衝材17及びダネッジ7がローラ93を図10のように押し付けると、図8の状態から回動アーム89及び連結アーム103が一体となって回動し、可動ピン111がスプリング115に抗して下降した状態となる。
【0052】
一方、アンチバック機構87は、横支持部材101の縦支持部材99近傍の下面から台車3側に突出する支持部材117の先端に、可動片119を備える構成としている。支持部材117の先端には下方向けて延びる支持片121を取り付けており、この支持片121の下端に、上記した可動片119を、上部横フレーム73cの長手方向を軸心として回転可能に取り付けている。
【0053】
可動片119は、上端が台車3側で下端が立て掛け保持部59側となるよう傾斜した状態で、支持片121に取り付ける側の上方の端部を、可動片119の長手方向に対して傾斜して水平面となる上部傾斜面119aとしている。この上部傾斜面119aが、支持片121の下端の図示しない回転規制部となるストッパに当接した状態で、可動片119が、上記したような上端が台車3側で下端が立て掛け保持部59側となるよう傾斜した状態となる。
【0054】
また、可動片119は、上記した上端が台車3側で下端が立て掛け保持部59側となるよう傾斜した状態で、下方の端部を、その長手方向に対して傾斜して鉛直面となる下部傾斜面119bとしている。この下部傾斜面119bに、立て掛け状態のダネッジ7の緩衝材17と反対側の面が当接する。この当接時には、上部傾斜面119aが、前記した図示しないストッパに当接して可動片119のそれ以上の台車3側への回転が規制される。
【0055】
ここで、左右一対の挟持部83のうち、図8中で左側の一方の挟持部83の可動片119は回動アーム89の縦フレーム73a側近傍に位置し、図8中で右側の他方の挟持部83の可動片119は回動アーム89の縦フレーム73b側近傍に位置している。これにより、各可動片119は、回動アーム89近傍のローラ93に近接していることになる。
【0056】
また、図11に示すように、支持部材117の先端には、支持片121を介してさらに取付アーム123を取り付け、該取付アーム123の先端には、シート状のガイド125の上端を取り付けて下方に垂れ下がるようにしている。このガイド125は、柔軟性がありかつ表面が平滑な例えば樹脂製とし、少なくとも下端が可動片119の上部傾斜面119aよりも下方に位置している。
【0057】
なお、上記した取付アーム123及びシート状のガイド125は、図1、図8〜図10では省略している。
【0058】
次に、作用を説明する。図1に示すように、多関節ロボット9のホイール把持部25により台車3上のホイール1を把持してコンベア25に搬出し、1つのダネッジ7上の複数のホイール1のすべてを搬出したら、図3のようにダネッジ7が最上部に露出した状態となる。
【0059】
この状態で、最上部に露出したダネッジ7及び、その下段のホイール1との間に介装してある緩衝材17を、図6に示したように、多関節ロボット9のダネッジ把持部37により把持してから、立て掛け保持部59に仮置きする。
【0060】
この把持動作は、多関節ロボット9のハンド13を、ダネッジ把持部37が下部でホイール把持部25が上部であってハンドフレーム21の長手方向が上下方向となるように、かつ可動アーム41の開口側が、図1の立て掛け保持部59と台車3との間にてダネッジ7及び緩衝材17に対向する位置となるよう移動調整する。
【0061】
この状態で、最上部に露出したダネッジ7及びその下段のホイール1との間に介装してある緩衝材17を、多関節ロボット9のダネッジ把持部37により、固定アーム43の先端の受け部45と可動アーム41の先端の押さえ部41aとの間で一緒に把持する。
【0062】
把持した後は、図7に示すように、ダネッジ把持部37による把持位置側を上方とした状態で、ダネッジ7及び緩衝材17を上下方向の縦置き(立て掛け)状態とする。このとき、ダネッジ7が台車3側に位置し、緩衝材17が立て掛け保持部59側に位置している。
【0063】
また、このとき、図7に示すように、シリンダ65を駆動してそのピストンロッド67を、図6の前進位置から後退位置とし、これによりダネッジ押さえ機構61の押さえアーム63を、ハンドフレーム21の長手方向とほぼ直交する状態となるよう回転させる。この状態で押さえアーム63は、上下方向の縦置き状態となっているダネッジ7とほぼ平行となり、先端の押さえ部63aでダネッジ7を押さえることでダネッジ7の変形を抑える。
【0064】
このような図7の状態で、ダネッジ7及び緩衝材17を立て掛け保持部59に仮置きする。この仮置き作業の手順を図11〜図13に示す。なお、図11〜図13及び、以後に説明する図14、図15では多関節ロボット9のハンド13を省略している。
【0065】
まず、図11に示すように、ダネッジ7及び緩衝材17の下端を把持する側の上端よりも前方(図11中で左側)となるよう傾斜させた状態で、その下端をダネッジ下端支持部75に接近させる。このとき、ダネッジ下端支持部75は、図10に示す錘81によって、ダネッジ7及び緩衝材17を支持していない非支持状態(図8)で、これらダネッジ7及び緩衝材17を立て掛ける際に投入する側に対向するよう傾斜する受け入れ待機姿勢を保持している。
【0066】
この状態で、ダネッジ7及び緩衝材17の下端を当接受け面79aに当接させて押し付けると、柔軟変形物の緩衝材17は大きく変形するが、ダネッジ7は大きく変形することなく、当接受け面79aを押圧して後方に回転させ、図12の状態となる。
【0067】
このとき、ダネッジ7の当接受け面79aへの初期の当接位置は、屈曲部79bと支持ブラケット77に対する回転中心との間である。ダネッジ7及び緩衝材17は、当接受け面79aに当接した後は、当接受け面79a上を滑るようにして屈曲部79bまで達する。ここで、当接受け面79aは、上記したようにダネッジ7及び緩衝材17の下端を滑らせるので、滑りやすい平滑面とすることが望ましい。
【0068】
上記のようにダネッジ7及び緩衝材17の下端を当接受け面79aに対し滑らせつつ支持部本体79を後方へ回転させるのに並行して、多関節ロボット9による把持部側の上部を前方に移動させる。すなわち、図11における矢印Aで示す斜め前下方の移動と、矢印Bで示す上部の前方への回転移動とを連続もしくは同時に行い、このときダネッジ7及び緩衝材17はその下端を支点として上部が前方へ回転することになる。
【0069】
ダネッジ7及び緩衝材17の上部の矢印Bで示す前方への回転移動によって、該上部がアンチバック機構87の可動片119を押し付け、可動片119を図11における矢印Cで示す方向に回転させる。このとき、ダネッジ7及び緩衝材17は、可動片119に接触する前に、可動片119の上部傾斜面119aをカバーしているシート状のガイド125の下部に接触しガイド125を押しのけるようにして可動片119に達する。これにより、ダネッジ7及び緩衝材17が可動片119の上部傾斜面119aや支持片121に接触して引っ掛かるような不具合の発生を抑制することができる。
【0070】
上記したダネッジ7及び緩衝材17は、可動片119を押し付けつつ回転させる過程で、可動片119を通り越すと、その前方の緩衝材押さえ機構85のローラ93に緩衝材17側から接触する。
【0071】
この接触後、ダネッジ7及び緩衝材17をローラ93にさらに押し付けると、ローラ93を支持している回動アーム89が図11の矢印Dで示す方向に回転して図12の状態となる。回動アーム89が上記矢印Dで示す方向に回転すると、連結アーム103も回動アーム89と一体的に同方向に回転し、これに伴ない、可動ピン111がスプリング115の弾性力に抗して下方に移動することになる。可動ピン111が下方に移動するときには、回動部材109が可動ピン111とともに支持アーム107に対して図12中で反時計方向に揺動回転し、可動ピン111は上端が下端よりも図12中で左側のフレーム73側となるよう傾斜する。
【0072】
ダネッジ7及び緩衝材17が、可動片119を図12のように通り越した後は、可動片119はその自重によって上端を支点として図11の矢印Cとは逆方向に回転し、上部傾斜面119aが支持片121の図示しないストッパに当接して図12の状態に戻る。
【0073】
次に、図12のように、ダネッジ7及び緩衝材17が、ローラ93を押し付けて回動アーム89を回転させ、かつ、可動片119を通り越した後に、ダネッジ7及び緩衝材17を、図11の矢印Bとは逆方向に戻すよう移動させる。これにより、ローラ93が緩衝材17をダネッジ7に向けて押し付けた状態で、ダネッジ7が可動片119の下部傾斜面119bに当接する図13の状態となる。この状態でロボット9によるダネッジ7及び緩衝材17の把持を解除し、ロボット9は次の作業へ移行する。
【0074】
図13は、一組のダネッジ7及び緩衝材17を立て掛け保持部59に仮置きした状態であり、上記したような作業を繰り返し行うことで、図14(a)に示すように、複数組(ここでは三組)のダネッジ7及び緩衝材17を仮置きすることができる。但し、二組目以降のダネッジ7及び緩衝材17を立て掛ける際には、図13のようにダネッジ下端支持部75が支持状態となって当接受け面79aがほぼ水平状態となっているので、支持部本体79を回転させる必要はない。
【0075】
なお、上記のようにしてダネッジ7及び緩衝材17を多関節ロボット9のハンド13で把持する際には、そのダネッジ把持部37における各可動アーム41と受け部45とによる把持位置を、一対のローラ93相互間として各ローラ93により近い位置となるようにする。一対のローラ93相互間で各ローラ93により近い位置は、ローラ93による押し付けによってダネッジ7と緩衝材17とがより密着しているので、把持動作を確実に行うことができ、仮置き作業を効率よく行える。
【0076】
また、図13及び図14のように、ローラ93で緩衝材17を押し付けてダネッジ7を可動片119に当接させるときには、可動片119が、回動アーム89近傍のローラ93により近い位置にある。このため、回動アーム89と可動片119とによるダネッジ7及び緩衝材17に対する保持動作を、緩衝材17のダネッジ7に対する位置ずれを抑えてより確実に行うことができる。
【0077】
次に、ダネッジ7及び緩衝材17を、立て掛け保持部59に複数組仮置きした図14(a)の状態から、多関節ロボット9により一緒に把持して図15に示す台車3上のパレット5上に移送する。なお、図15の台車3は、図1に示してある台車3上のホイール1をすべて搬出した状態である。したがって、この台車3には、緩衝材17の上にダネッジ7を重ね合わせた状態のダネッジ7及び緩衝材17が、三組存在していたことになる。
【0078】
まず、図14の状態で、三組のダネッジ7及び緩衝材17の上部を多関節ロボット9のダネッジ把持部37により把持する。このときの把持位置は、ダネッジ7及び緩衝材17を立て掛け保持部59に立て掛けたときとほぼ同様に、一対のローラ93相互間とする。このとき、ダネッジ把持部37は、図4に示すように、可動アーム位置調整シリンダ55を駆動してそのピストンロッド57を進出移動させた状態とし、開放状態の可動アーム41の押さえ部41aと受け部45との間隔を広く確保しておく。この間隔を広くすることで、三組のダネッジ7及び緩衝材17の把持を容易なものとする。
【0079】
この状態で、ダネッジ把持部37を立て掛けた状態のダネッジ7及び緩衝材17の上部に移動させてこれら三組のダネッジ7及び緩衝材17を一緒に把持する。このとき、ダネッジ7及び緩衝材17を立て掛け保持部59に立て掛けたときと同様に、可動アーム41の押さえ部41aが緩衝材17側に位置し、受け部45がダネッジ7側に位置している。
【0080】
把持する際には、図4に示す一対のシリンダ39によりそのピストンロッド53を進出駆動してクランプ状態とした上で、可動アーム位置調整シリンダ55により3本のピストンロッド57を後退駆動する。これにより、ダネッジ7及び緩衝材17を可動アーム41の押さえ部41aと受け部45との間で把持する。
【0081】
この把持時においても、ダネッジ7及び緩衝材17を立て掛け保持部59に立て掛けるときと同様に、可動アーム41と受け部45とによる把持位置が、一対のローラ93相互間で各ローラ93に近い位置となっている。このため、ダネッジ7と緩衝材17とがより密着した部位を把持することになるので、把持動作を確実に行うことができる。
【0082】
図14の状態で三組のダネッジ7及び緩衝材17を多関節ロボット9により把持した後は、これらダネッジ7及び緩衝材17を、多関節ロボット9により、矢印Eで示す上方に移動させるとともに、下部を矢印Fで示す台車3側へ移動させて、図15の状態とする。このとき、ローラ93を多少前方(図11中で左側)に押し付けるようにする。この動作の過程で、ダネッジ下端支持部75の支持部本体79は、錘81の作用で図14(a)中で時計方向に回転して図14(b)の受け入れ待機姿勢に戻る。
【0083】
図14(b)の状態では、三組のダネッジ7及び緩衝材17は下部が図中で右側の台車3側に位置するように傾斜しており、この状態から矢印Gで示すようにその傾斜に沿って下方に移動させ、図15に示すように可動片119や回動アーム89よりも下方に位置させる。
【0084】
その後は、これら三組のダネッジ7及び緩衝材17を、多関節ロボット9により、矢印Hで示すように、立て掛け保持部59から離れる方向にほぼ平行移動させ、台車3の立て掛け保持部59と反対側の端部付近に位置させる。
【0085】
続いて、矢印Iで示すように、多関節ロボット9により、ダネッジ7及び緩衝材17の上部を、下端を支点として前方の立て掛け保持部59側に向けて回転させるようにしてパレット5上に載せる。このとき、柔軟性のある緩衝材17が下部側となるので、矢印Iの方向に移動させる際には、多関節ロボット9により、ダネッジ7及び緩衝材17の下部を一旦立て掛け保持部59から離れる図15中で右方向に振るようにする。これにより、緩衝材17を慣性によりダネッジ7に密着させた状態とする。その結果、ダネッジ7及び緩衝材17をパレット5上に載せるときに、柔軟性のある緩衝材17が折れ曲がるなどの変形を抑えた状態とすることができる。
【0086】
台車3上のパレット5に使用済みのダネッジ7及び緩衝材17を載せたら、この台車3を立て掛け保持部59から離反移動させ、別途ホイール1を多段に積み重ねてある台車3を再度立て掛け保持部59の近傍に移動させて、上記と同様の作業を繰り返す。
【0087】
以上説明したように、本実施形態によれば、ダネッジ下端支持部75によりダネッジ7の下端を支持するとともに、ダネッジ7及び緩衝材17の上部に対し、緩衝材押さえ機構85が緩衝材17を弾性的に押し付け、この押し付け力をアンチバック機構87がダネッジ7を介して受けることで、ダネッジ7及び緩衝材17を互いに対向する面を押し付けるようにして挟持する。
【0088】
このため、立て掛けたときに自立可能なダネッジ7と、柔軟変形物からなる緩衝材17とを互いに重ね合わせた状態で、これらダネッジ7及び緩衝材17を、特に緩衝材17のずれ落ちを抑えながら立て掛けて保持することができる。
【0089】
その際、アンチバック機構87の可動片119は、該アンチバック機構87と緩衝材押さえ機構85とによってダネッジ7及び緩衝材17を挟持した状態で、緩衝材押さえ機構85による押し付け方向の回転が規制されている。このため、別途アクチュエータや複雑な制御を必要とすることなく、ダネッジ7及び緩衝材17を立て掛けた状態での保持をより簡素な構成で達成することができる。
【0090】
また、本実施形態によれば、ダネッジ下端支持部75は、ダネッジ7の下端が当接して受ける当接受け面79aを備え、この当接受け面79aは、ダネッジ7を支持していない非支持状態で、ダネッジ7及び緩衝材17を立て掛ける際に投入する側に対向するよう傾斜する受け入れ待機姿勢を保持し、この受け入れ待機姿勢に対して上端が下方に向かう方向に回転可能である。
【0091】
このため、ダネッジ7及び緩衝材17の投入時には、その下端を受け入れ待機姿勢の当接受け面79aに当接させることで、位置合わせが容易となり、搬出時にも当接受け面79aが立ち上がった状態の受け入れ待機姿勢となるので、容易に取り出すことができる。
【0092】
また、本実施形態によれば、ダネッジ下端支持部75は、支持姿勢で上方に向けて屈曲する屈曲部79bを有し、当接受け面79aは、ダネッジ7を支持している支持状態で、ダネッジ7及び緩衝材17を立て掛ける際に投入する側に対してその反対側が下方となるよう傾斜している。このため、ダネッジ7及び緩衝材17の支持状態が安定化する。
【0093】
また、本実施形態によれば、挟持部83の緩衝材押さえ機構85は、上部を支点として回動可能な回動アーム89の先端に緩衝材17に接触しつつ回転するローラ93を設けている。このため、ダネッジ7及び緩衝材17を立て掛ける際に回動アーム89が回転してその先端が緩衝材17に対して移動しても、ローラ93の回転によって緩衝材17の位置ずれを抑えることができる。
【0094】
また、本実施形態によれば、立て掛け保持部59は、ワーク積載部16からホイール1を順次搬出するにあたり、ダネッジ7とその下部に位置する緩衝材17とをワーク積載部16から取り除き、この取り除いたダネッジ7及び緩衝材17を仮置きのために立て掛けて保持する。
【0095】
このため、ワーク積載部16からのホイール1の搬出工程で使用する使用済みのダネッジ7及び緩衝材17の仮置き作業を効率よく行うことができる。
【0096】
さらに、本実施形態によれば、ダネッジ7及び緩衝材17の上部を、緩衝材17側からアンチバック機構87に押し付けつつ該アンチバック機構87を前方に向けて移動させて、ダネッジ7及び緩衝材17を、アンチバック機構87と緩衝材押さえ機構85との間に介在させて保持させる。
【0097】
このため、ダネッジ7及び緩衝材17をアンチバック機構87と緩衝材押さえ機構85との間に介在させるときには、単にアンチバック機構87をダネッジ7及び緩衝材17によって押し付けて移動させるだけでよいので、立て掛け作業を容易に行うことができる。
【0098】
なお、本実施形態では、板状部材としてホイール1を載せるダネッジ7とし、柔軟変形物からなるシート状部材を緩衝材17としているが、他の物品であっても構わない。
【符号の説明】
【0099】
1 自動車用タイヤのホイール(ワーク)
7 ダネッジ(ワーク受け、板状部材)
16 ワーク積載部
17 緩衝材(シート状部材)
37 ダネッジ把持部(把持具)
59 立て掛け保持部
75 ダネッジ下端支持部(板状部材支持部)
79a ダネッジ下端支持部の当接受け面
79b ダネッジ下端支持部の屈曲部
83 挟持部
85 緩衝材押さえ機構(シート状部材押さえ部)
87 アンチバック機構(板状部材受け部)
89 緩衝材押さえ機構の回動アーム(アーム)
93 緩衝材押さえ機構のローラ(回転体)
【特許請求の範囲】
【請求項1】
立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で、これら板状部材及びシート状部材を立て掛けて保持する立て掛け保持部を備え、この立て掛け保持部は、前記板状部材及びシート状部材を立て掛けた状態で、前記板状部材の下端を支持する板状部材支持部と、前記板状部材及びシート状部材の上部に対し、互いに対向する面を押し付けるようにして挟持する挟持部とを有し、この挟持部は、前記シート状部材を前記板状部材に向けて弾性的に押し付けるシート状部材押さえ部と、このシート状部材押さえ部に向けて移動可能であるとともに、シート状部材押さえ部による押し付け方向の力を前記板状部材を介して受け、該押し付け方向の移動が規制されることで、前記シート状部材押さえ部との間で前記板状部材及びシート状部材を挟持する板状部材受け部とを備えていることを特徴とする柔軟変形物を含む物品の立て掛け装置。
【請求項2】
前記板状部材支持部は、前記板状部材の下端が当接して受ける当接受け面を備え、この当接受け面は、前記板状部材を支持していない非支持状態で、前記板状部材及びシート状部材を立て掛ける際に投入する側に対向するよう傾斜する受け入れ待機姿勢を保持し、この受け入れ待機姿勢に対して上端が下方に向かう方向に回転可能であることを特徴とする請求項1に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項3】
前記板状部材支持部は、前記当接受け面の前記板状部材及びシート状部材を立て掛ける際に投入する側と反対側に、前記受け入れ待機姿勢に対して上端が下方に向かう方向に回転した支持姿勢で上方に向けて屈曲する屈曲部を有し、前記当接受け面は前記支持姿勢で、前記板状部材及びシート状部材を立て掛ける際に投入する側に対してその反対側が下方となるよう傾斜していることを特徴とする請求項2に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項4】
前記挟持部のシート状部材押さえ部は、上部を支点として回動可能なアームを備え、このアームの先端に該アームが回動する際に前記シート状部材に接触しつつ回転する回転体を設けたことを特徴とする請求項1ないし3のいずれか1項に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項5】
前記板状部材は、ワークを載せるワーク受けであり、これらワーク受け及びワークを多段に積み重ねてワーク積載部を設け、このワーク積載部におけるワーク受けとその下段に位置するワークとの間に、緩衝材として前記柔軟変形物からなるシート状部材を配置し、前記立て掛け保持部は、前記ワーク積載部からワークを順次搬出するにあたり、前記ワーク受けとその下部に位置する前記緩衝材とを前記ワーク積載部から取り除き、この取り除いたワーク受け及び緩衝材を立て掛けて保持することを特徴とする請求項1ないし4のいずれか1項に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項6】
前記シート状部材は、高発泡ポリエチレンシートであることを特徴とする請求項1ないし5のいずれか1項に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項7】
前記ワークは、自動車用タイヤのホイールであることを特徴とする請求項5に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項8】
立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で、これら板状部材及びシート状部材を立て掛け保持部に立て掛けて保持する際に、前記板状部材及びシート状部材を立て掛けた状態で、前記板状部材の下端を板状部材支持部により支持するとともに、前記板状部材及びシート状部材の上部に対し、互いに対向する面を押し付けるようにして挟持部により挟持し、この挟持部により挟持するときに、前記シート状部材をシート状部材押さえ部により前記板状部材に向けて弾性的に押し付ける一方、このシート状部材押さえ部による押し付け方向の力を、前記シート状部材押さえ部に向けて移動可能な板状部材受け部が受けるときに、この板状部材受け部の前記シート状部材押さえ部による押し付け方向の移動が規制されることで、前記シート状部材押さえ部と前記板状部材受け部との間で前記板状部材及びシート状部材を挟持することを特徴とする柔軟変形物を含む物品の立て掛け方法。
【請求項9】
前記板状部材及びシート状部材の上部を、前記シート状部材側から前記板状部材受け部に押し付けつつ該板状部材受け部を前方に向けて移動させて、前記板状部材及びシート状部材を、前記板状部材受け部と前記シート状部材押さえ部との間に介在させて保持させることを特徴とする請求項8に記載の柔軟変形物を含む物品の立て掛け方法。
【請求項1】
立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で、これら板状部材及びシート状部材を立て掛けて保持する立て掛け保持部を備え、この立て掛け保持部は、前記板状部材及びシート状部材を立て掛けた状態で、前記板状部材の下端を支持する板状部材支持部と、前記板状部材及びシート状部材の上部に対し、互いに対向する面を押し付けるようにして挟持する挟持部とを有し、この挟持部は、前記シート状部材を前記板状部材に向けて弾性的に押し付けるシート状部材押さえ部と、このシート状部材押さえ部に向けて移動可能であるとともに、シート状部材押さえ部による押し付け方向の力を前記板状部材を介して受け、該押し付け方向の移動が規制されることで、前記シート状部材押さえ部との間で前記板状部材及びシート状部材を挟持する板状部材受け部とを備えていることを特徴とする柔軟変形物を含む物品の立て掛け装置。
【請求項2】
前記板状部材支持部は、前記板状部材の下端が当接して受ける当接受け面を備え、この当接受け面は、前記板状部材を支持していない非支持状態で、前記板状部材及びシート状部材を立て掛ける際に投入する側に対向するよう傾斜する受け入れ待機姿勢を保持し、この受け入れ待機姿勢に対して上端が下方に向かう方向に回転可能であることを特徴とする請求項1に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項3】
前記板状部材支持部は、前記当接受け面の前記板状部材及びシート状部材を立て掛ける際に投入する側と反対側に、前記受け入れ待機姿勢に対して上端が下方に向かう方向に回転した支持姿勢で上方に向けて屈曲する屈曲部を有し、前記当接受け面は前記支持姿勢で、前記板状部材及びシート状部材を立て掛ける際に投入する側に対してその反対側が下方となるよう傾斜していることを特徴とする請求項2に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項4】
前記挟持部のシート状部材押さえ部は、上部を支点として回動可能なアームを備え、このアームの先端に該アームが回動する際に前記シート状部材に接触しつつ回転する回転体を設けたことを特徴とする請求項1ないし3のいずれか1項に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項5】
前記板状部材は、ワークを載せるワーク受けであり、これらワーク受け及びワークを多段に積み重ねてワーク積載部を設け、このワーク積載部におけるワーク受けとその下段に位置するワークとの間に、緩衝材として前記柔軟変形物からなるシート状部材を配置し、前記立て掛け保持部は、前記ワーク積載部からワークを順次搬出するにあたり、前記ワーク受けとその下部に位置する前記緩衝材とを前記ワーク積載部から取り除き、この取り除いたワーク受け及び緩衝材を立て掛けて保持することを特徴とする請求項1ないし4のいずれか1項に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項6】
前記シート状部材は、高発泡ポリエチレンシートであることを特徴とする請求項1ないし5のいずれか1項に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項7】
前記ワークは、自動車用タイヤのホイールであることを特徴とする請求項5に記載の柔軟変形物を含む物品の立て掛け装置。
【請求項8】
立て掛けたときに自立可能な板状部材と、柔軟変形物からなるシート状部材とを互いに重ね合わせた状態で、これら板状部材及びシート状部材を立て掛け保持部に立て掛けて保持する際に、前記板状部材及びシート状部材を立て掛けた状態で、前記板状部材の下端を板状部材支持部により支持するとともに、前記板状部材及びシート状部材の上部に対し、互いに対向する面を押し付けるようにして挟持部により挟持し、この挟持部により挟持するときに、前記シート状部材をシート状部材押さえ部により前記板状部材に向けて弾性的に押し付ける一方、このシート状部材押さえ部による押し付け方向の力を、前記シート状部材押さえ部に向けて移動可能な板状部材受け部が受けるときに、この板状部材受け部の前記シート状部材押さえ部による押し付け方向の移動が規制されることで、前記シート状部材押さえ部と前記板状部材受け部との間で前記板状部材及びシート状部材を挟持することを特徴とする柔軟変形物を含む物品の立て掛け方法。
【請求項9】
前記板状部材及びシート状部材の上部を、前記シート状部材側から前記板状部材受け部に押し付けつつ該板状部材受け部を前方に向けて移動させて、前記板状部材及びシート状部材を、前記板状部材受け部と前記シート状部材押さえ部との間に介在させて保持させることを特徴とする請求項8に記載の柔軟変形物を含む物品の立て掛け方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−43730(P2013−43730A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181374(P2011−181374)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]