
柱状構造物の損傷検知方法、損傷検知装置およびプログラム
【課題】柱状構造物のばらつきに依存することなく、短時間、低コストで柱状構造物の損傷の有無、損傷程度および損傷方向を検知できる柱状構造物の損傷検知方法を提供する。
【解決手段】コンクリート柱1の地際から末口の間に設定した振動発生装置によりコンクリート柱全体を揺らす振動を水平多方向に発生させ、前記コンクリート柱全体を揺らす振動を、地際から末口の間に設置された受信センサ3により受信する。損傷検知装置10にて、受信センサ3で受信した円周方向別における時系列波形を時間毎の周波数分布に置き換え、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求める。求めた円周方向別の卓越振動数の差のグラフを表示し、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定する。
【解決手段】コンクリート柱1の地際から末口の間に設定した振動発生装置によりコンクリート柱全体を揺らす振動を水平多方向に発生させ、前記コンクリート柱全体を揺らす振動を、地際から末口の間に設置された受信センサ3により受信する。損傷検知装置10にて、受信センサ3で受信した円周方向別における時系列波形を時間毎の周波数分布に置き換え、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求める。求めた円周方向別の卓越振動数の差のグラフを表示し、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、柱状構造物の水平多方向加振による衝撃弾性波振動モードを利用した柱状構造物の損傷検知方法、損傷検知装置およびプログラムに関するものである。
【背景技術】
【0002】
コンクリート柱は、送電、通信等の社会基盤を支える構造物として、膨大な数が布設されている。これらの異常検知を目的とした簡易点検については、主に目視による確認が行われている。また、従来の損傷検知方法として、渦流探傷法を用いた方法(特許文献1参照)等、コンクリート柱における、補強鋼材の破断等の劣化機構に依存する精度の高い損傷検知方法の応用も進んでいるほか、近年では、弾性波振動モードを利用したコンクリート柱の損傷検知方法についても、柱上端に張られているケーブルなど架渉物の影響を最小限にするため、柱上端近辺を拘束させる方法といった応用が勧められている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−72481号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし前者の目視点検においては、損傷の有無について定量的判断が困難であり、長期供用中に損傷の見落としにより、劣化が進行するケースも存在する。また、渦流探傷法を用いた方法では、センサの取り付け位置をコンクリート柱全体に渡って一定間隔毎にずらして計測する必要があり、例えば、コンクリート柱の先端部では高所の作業が必要となり、作業性の面で問題がある。更に、渦流探傷法を用いた方法は、コンクリート柱全体に及ぶ確認についての高度な専門知識、装置が必要であり、時間的、経済的制約が強く、膨大なコンクリート柱を短時間で簡易に点検する方法として応用することが困難である。
【0005】
また、コンクリート柱は、その製造過程における厚みや弾性係数が異なり、また、建柱時に生じる根入れ長が異なるため、弾性波振動モードにばらつきが生じ、劣化状態の弾性波振動モードと比較するための健全状態の弾性波振動モードを定量的に求めることは困難である。
このため、弾性波振動モードを利用した損傷検知方法については、コンクリート柱の製造過程における厚みや弾性係数のばらつきや、建柱時に生じる根入れ長のばらつきに依存することなく損傷の有無、損傷程度および損傷方向を検知することが課題となっている。
【0006】
本発明は、このような問題点に鑑みてなされたものであり、本発明の目的は、目視以外の方法で、かつコンクリート柱等のような柱状構造物の製造過程などにおけるばらつきに依存することなく、短時間、低コストで柱状構造物の損傷の有無、損傷程度および損傷方向を検知することができる柱状構造物の損傷検知方法、損傷検知装置およびプログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の柱状構造物の損傷検知方法は、柱状構造物の地際から末口の間に設定した振動発生装置により柱状構造物全体を揺らす振動を水平一方向に発生させるステップと、前記柱状構造物全体を揺らす振動を、地際から末口の間の複数箇所に設置された受信センサにより時系列波形として円周方向別に受信するステップと、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、求めた円周方向別の卓越振動数の差のグラフを表示するステップと、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップとを含むことを特徴とする。
【0008】
また、本発明の柱状構造物の損傷検知方法は、柱状構造物の地際から末口の間に設定した振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させるステップと、前記柱状構造物全体を揺らす振動を、地際から末口の間の単一箇所または複数箇所に設置された受信センサにより時系列波形として円周方向別に受信するステップと、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、求めた円周方向別の卓越振動数の差のグラフを表示するステップと、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップとを含むことを特徴とする。
【0009】
また、本発明の柱状構造物の損傷検知方法において、前記周波数分布に置き換えるステップは、前記受信した円周方向別における時系列波形を、ウェーブレット変換により時間毎の周波数分布に置き換えるステップを含むことを特徴とする。
【0010】
また、本発明の柱状構造物の損傷検知方法において、前記加振方向振動が支配的となる時間領域は、前記振動発生装置により柱状構造物全体を揺らす振動を与えたときから0〜0.5秒であることを特徴とする。
【0011】
また、本発明の柱状構造物の損傷検知方法において、前記時系列波形を受信するステップは、前記柱状構造物全体を揺らす振動を、地際から末口の間の単一箇所に設置された受信センサにより受信し、単一箇所のセンサの受信情報から加振方向毎の振動をベクトル合成するステップを含むことを特徴とする。
【0012】
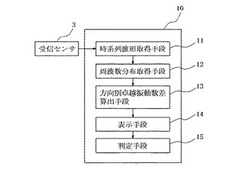
また、本発明の損傷検知装置は、振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサから受信する時系列波形取得手段と、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換える周波数分布取得手段と、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求める方向別卓越振動数差算出手段と、求めた円周方向別の卓越振動数の差のグラフを表示する表示手段と、円周方向別の卓越振動数の差を解析して損傷の有無、損傷の程度および損傷方向を判定する判定手段とを備えることを特徴とする。
【0013】
更に、本発明は、柱状構造物の損傷検知装置として構成するコンピュータに、振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサから受信するステップと、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、求めた円周方向別の卓越振動数の差のグラフを表示するステップと、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップとを実行させるためのプログラムとしての特徴を有する。
【発明の効果】
【0014】
本発明は、目視等の確認が難しい場合において、柱状構造物のばらつきに依存することなく、短時間、低コストで柱状構造物の損傷の有無、損傷の程度および損傷の方向を検知することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の柱状構造物の損傷検知方法の概要を示す図である。
【図2】本発明の柱状構造物の損傷検知方法における打撃加振装置を示す図である。
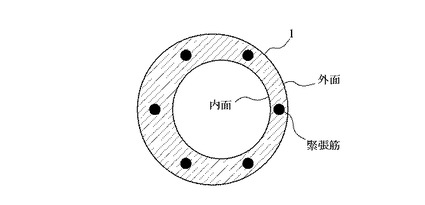
【図3】加振用打撃の方向を説明するコンクリート柱の断面図である。
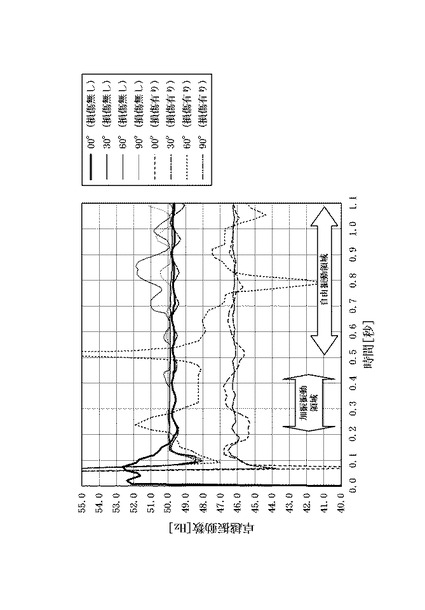
【図4】打撃加振によるコンクリート柱の加振方向振動と自由振動の各領域が支配的となる時間を示す図である。
【図5】厚みが均一でないコンクリート柱の断面の一例を示す図である。
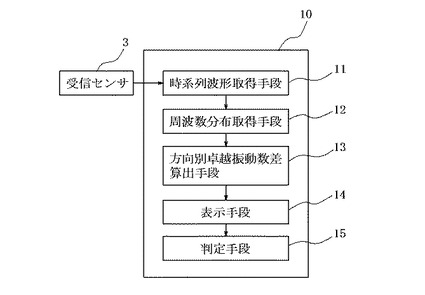
【図6】受信センサに接続される損傷検知装置の構成を説明する図である。
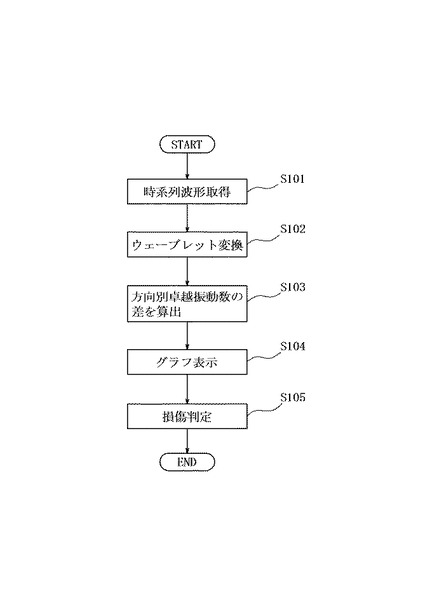
【図7】図6に示す損傷検知装置の動作を説明するフローチャートである。
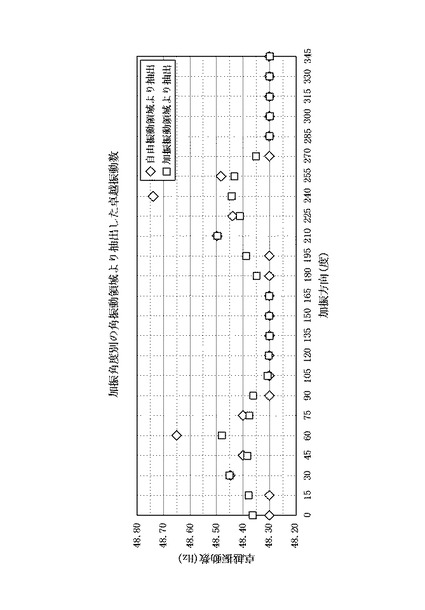
【図8】加振方向が支配的となる時間領域のスカログラム卓越振動数と自由振動を含む時間領域のスカログラム卓越振動数の比較を加振角度別に示す図である。
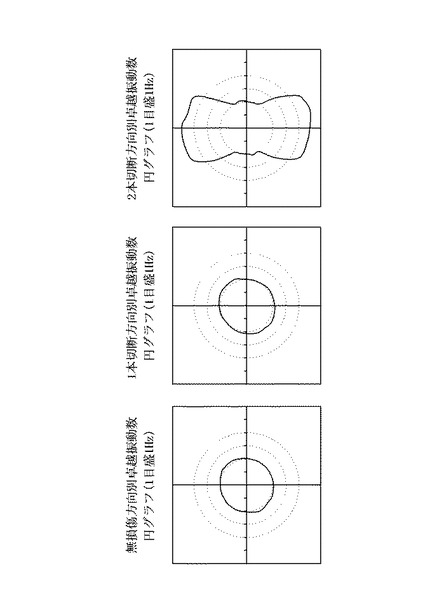
【図9】損傷程度と損傷方向の卓越振動数変化を示す図である。
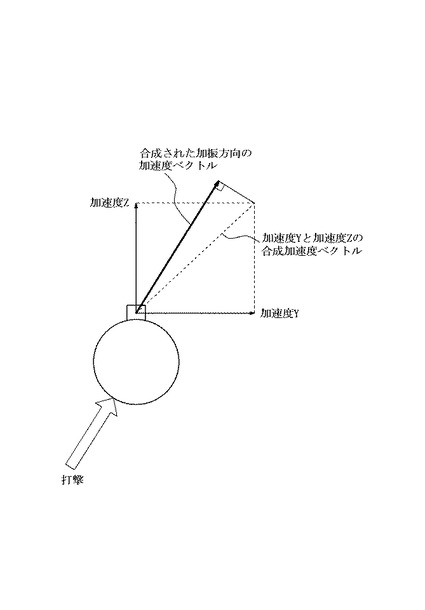
【図10】単一の受信センサで振動を受信し、水平2成分の情報から加振方向の振動をベクトル合成する場合について説明する図である。
【発明を実施するための形態】
【0016】
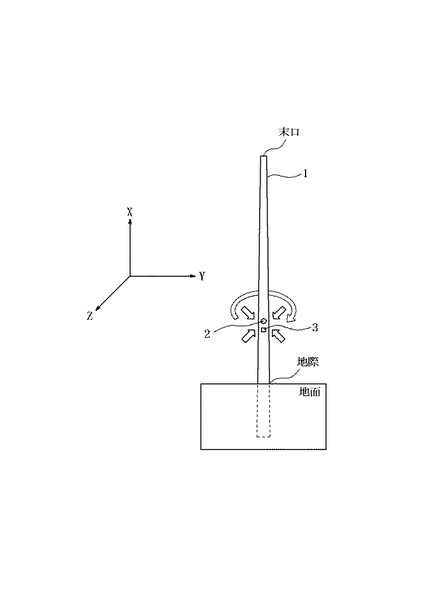
本発明の実施の形態について図面を参照して説明する。本発明の柱状構造物の損傷検知方法の概要を示す図である。本発明の柱状構造物の損傷検知方法は、柱状構造物である図1に示すコンクリート柱1の表面に加振点2を水平多方向に設定し、加振点2を加振することでコンクリート柱全体を水平多方向毎に振動させ、コンクリート柱1の地際から末口の間に設置された受信センサ3により、コンクリート柱1の損傷により生じる振動モードの変化を受信し、受信したデータから加振方向ごとに加振方向振動の周波数分布を算出し、その卓越振動数の変化より、損傷の有無、損傷の程度および損傷方向を検知するものである。
【0017】
受信センサ3には、加速度センサやマイクロフォンが用いられる。X軸をコンクリート柱の長尺方向とし、互いに直交するY軸、Z軸を、コンクリート柱の長尺方向(X軸方向)に対して直交する方向とし、受信センサ3によりY軸方向、Z軸方向の加速度を測定する。
【0018】
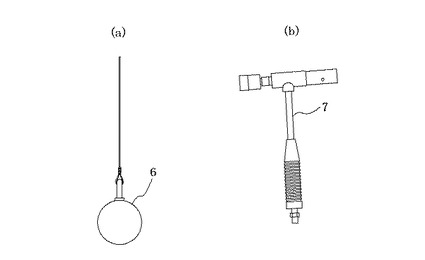
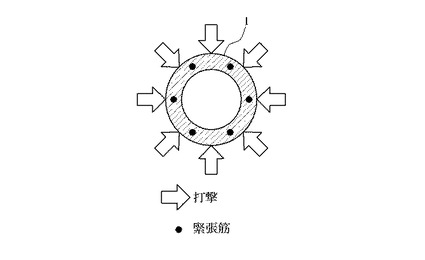
振動発生装置により加振するコンクリート柱1の表面の加振点2は、コンクリート柱1の地際から末口の間に設定され、振動発生装置としては、図2(a)に示す鉄球6や図2(b)に示す打突ハンマー7等の打撃加振装置が用いられる。鉄球6や打突ハンマー7等による打撃を用いて、図1に示すコンクリート柱全体を、図3の断面図に示すように、水平多方向毎(所定角度毎)に加振(打撃)して、水平多方向に振動させ、コンクリート柱1の地際から末口の間に設置された受信センサ3により、コンクリート柱1の損傷により生じる加振方向毎の振動モードの変化を受信し、受信センサ3に接続される損傷検知装置(図示せず)において、受信した円周方向別における時系列波形から時間毎の周波数分布に置き換え、加振方向別の卓越振動数の差の変化を読み取って、損傷の有無、損傷の程度および損傷方向を検知するものである。
ここで、振動モードとは、受信センサ3で、振動(加速度)を受信し、その振動(加速度)の周期、振幅からスペクトルに変換し、振幅の高い周波数帯を言う。
【0019】
図4は、コンクリート柱に加振を与えて受信センサで受信される時系列波形を示す図である。コンクリート柱1に加振を与えて受信センサで受信される時系列波形は、図4に示すように加振方向振動から自由振動へ変化し、振動が乱れ、収束する過程を捉えている。コンクリート柱に加振を与えた場合、例えば、コンクリート柱が、図5の断面図に示すように、偏心していて厚みが均一でない場合は、振動の時系列波形は、最初に加振方向の振動となり、その後にコンクリート柱の固有振動数で振動する自由振動へと変化する。すなわち、自由振動が支配的となっている時間領域の卓越振動数には、損傷有無のみならず添架物や柱の製造過程で生じる構造の特徴が混在する。そのため、損傷の検知を読み取るためには、図4に示す自由振動に変化する前の加振方向振動が支配的となっている時間領域の卓越振動数を使用する必要がある。この加振方向振動が支配的となる時間領域における卓越振動数数の変化により、コンクリート柱の損傷の有無をとらえることが可能である。
【0020】
加振方向振動が支配的となる時間領域は、コンクリート柱を加振してから0〜0.5秒とするのが望ましいが、0〜0.2秒は振動の乱れが大きいこと、0.4〜0.5秒は自由振動への過渡領域を含むことがあるので、0.2〜0.4とするのが更に望ましい。
【0021】
加振点2の高さは、コンクリート柱全体の振動が発生される位置である必要がある。加振点2は、コンクリート柱1の地際から末口の間に設定できるが、作業効率の観点から、作業員が立位で振動発生装置を設置可能で、かつ打撃可能な地際から1.5〜2.5m程度の位置が望ましい。
受信センサ3の受信位置の高さは、コンクリート柱全体の振動が受信される位置である必要があり、各種雑音の拾いやすい末口付近は避ける必要がある。受信センサ3は、コンクリート柱1の地際から末口の間に設置できるが、作業効率の観点から、作業員が立位で受信センサ3を設置可能で、かつ振動を受信可能な地際から1.5〜2.5m程度の位置が望ましい。
本発明では、作業上都合の良い高さ(地際から2m程度)に受信センサ3を設置し、作業上都合の良い高さ(地際から2m程度)で振動を与えることによって、コンクリート柱全体における損傷の有無を検知可能である。
【0022】
この発明の有効性を示すために、図1に示すコンクリート柱を対象とした円周方向加振による卓越振動数計測の実験を実施した。加振用打撃の位置および受信センサの位置は、地際から2.3mの位置とした。全長8mのコンクリート柱を対象に、水平多方向毎の加振によるコンクリート柱全体振動の加振方向振動と自由方向振動の卓越振動数の変化について損傷有無の特徴を確認した。
【0023】
実験から取得した損傷の無いコンクリート柱による加振方向振動の領域から抽出した卓越振動数と自由振動の領域から抽出した卓越振動数を図8に示す。この結果により、加振方向振動の領域から抽出した卓越振動数は自由振動の領域から抽出した卓越振動数と比較してばらつきが少ないことがわかる。
【0024】
実験による損傷のない場合の加振方向振動のスカログラムより抽出した方向別卓越振動数と同一コンクリート柱の鋼材1本切断および2本切断した場合の加振方向振動のスカログラムより抽出した方向別卓越振動数の比較グラフを図8に示す。損傷の無い場合の方向別卓越振動数の差は0.2Hz程度であり、鋼材1本損傷の方向別卓越振動数の差は0.4Hz程度であり、鋼材2本損傷の場合の方向別卓越振動数の差は3.3Hz程度となり、この方向別卓越振動数の変化により損傷の有無、損傷程度および損傷方向を検知することができる。
このように、本発明は、加振方向振動が支配的となる時間領域において、卓越振動数の差(抽出した卓越振動数の最低値を基準にした周波数差)を円周方向別に求め、この差がコンクリート柱のひび割れや亀裂、鋼材腐蝕や破断、柱自身の腐食や風化などの劣化による剛性の低下から変化することに基づいて、損傷の有無を検知し、卓越振動数の差の大きさから損傷の程度を検知し、卓越振動数の差の大きい方向から損傷の方向を検知することができる。
【0025】
図6は、受信センサに接続される損傷検知装置の構成を説明する図である。損傷検知装置10は、振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサ3から受信する時系列波形取得手段11と、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換える周波数分布取得手段12と、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差(最低周波数の卓越振動数との周波数差)を円周方向別に求める方向別卓越振動数差算出手段13と、求めた円周方向別の卓越振動数の差のグラフを表示する表示手段14と、円周方向別の卓越振動数の差を解析して損傷の有無、損傷の程度および損傷方向を検知する判定手段15を備えている。損傷検知装置10は、コンピュータとして構成することができ、損傷検知装置10の各機能を実現する処理内容を記述したプログラムを、当該コンピュータの記憶部に格納しておき、当該コンピュータの中央演算処理装置(CPU)によってこのプログラムを読み出して実行させることで実現することができる。
【0026】
図7は、図6に示す損傷検知装置の動作を説明するフローチャートである。コンクリート柱1の地際から末口の間に設定した振動発生装置により水平多方向毎に加振(打撃)して、コンクリート柱全体を揺らす振動を水平多方向に発生させたときに、その振動を、地際から末口の間の単一箇所または複数箇所に設置された受信センサ3が受信し、受信センサ3が受信した振動の時系列波形を時系列波形取得手段11が取得する(ステップS101)。周波数分布取得手段12にて、受信した円周方向別における時系列波形からウェーブレット変換により時間毎の周波数分布に置き換え(ステップS102)、方向別卓越振動数差算出手段13にて、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において、卓越振動数の差(最低周波数の卓越振動数との周波数差)を円周方向別に求める(ステップS103)。求めた円周方向別の卓越振動数の差のグラフを表示手段14に表示し(ステップS104)、判定部15にて、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定する(ステップS105)。
なお、表示手段14に表示したグラフの特徴から技術者が損傷の有無、損傷の程度および損傷の方向を判定するようにしても良い。
【0027】
図9は、水平多方向に発生させたコンクリート柱全体を揺らす振動を単一の受信センサで受信し、水平2成分の情報から加振方向毎の振動をベクトル合成する場合について説明する図である。図9の矢印で示す方向からコンクリート柱に加振を与え、受信センサ3にて、Y軸方向の加速度Yと、Z軸方向の加速度Zを測定し、加速度Yと加速度Zの合成加速度ベクトルを求め、その合成加速度ベクトルから加振方向の加速度ベクトルを求めることができる。
【0028】
なお、上述した実施の形態では、受信センサが1つの場合について説明したが、本発明は、受信センサをコンクリート柱の周囲表面上に複数個設置するようにしても良い。コンクリート柱の表面上に複数個の受信センサを設置した場合は、単一の受信センサの情報による検知よりも複数の受信センサから同時に検知することにより信頼性を向上させることができる。
また、コンクリート柱1の全周に渡って加振する必要はなく、半周に渡って加振してもよい。また、1方向に加振しても多方向にそれぞれ受信センサを設置することによって損傷を検知することが可能である。本発明は、1方向以上の加振により、受信した振動データから損傷の有無、損傷の程度および損傷方向を検知することができるものである。
【符号の説明】
【0029】
1 コンクリート柱
2 加振点
3 受信センサ
6 鉄球
7 打突ハンマー
10 損傷検知装置
11 時系列波形取得手段
12 周波数分布取得手段
13 方向別卓越振動数差算出手段
14 表示手段
15 判定手段
【技術分野】
【0001】
本発明は、柱状構造物の水平多方向加振による衝撃弾性波振動モードを利用した柱状構造物の損傷検知方法、損傷検知装置およびプログラムに関するものである。
【背景技術】
【0002】
コンクリート柱は、送電、通信等の社会基盤を支える構造物として、膨大な数が布設されている。これらの異常検知を目的とした簡易点検については、主に目視による確認が行われている。また、従来の損傷検知方法として、渦流探傷法を用いた方法(特許文献1参照)等、コンクリート柱における、補強鋼材の破断等の劣化機構に依存する精度の高い損傷検知方法の応用も進んでいるほか、近年では、弾性波振動モードを利用したコンクリート柱の損傷検知方法についても、柱上端に張られているケーブルなど架渉物の影響を最小限にするため、柱上端近辺を拘束させる方法といった応用が勧められている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−72481号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし前者の目視点検においては、損傷の有無について定量的判断が困難であり、長期供用中に損傷の見落としにより、劣化が進行するケースも存在する。また、渦流探傷法を用いた方法では、センサの取り付け位置をコンクリート柱全体に渡って一定間隔毎にずらして計測する必要があり、例えば、コンクリート柱の先端部では高所の作業が必要となり、作業性の面で問題がある。更に、渦流探傷法を用いた方法は、コンクリート柱全体に及ぶ確認についての高度な専門知識、装置が必要であり、時間的、経済的制約が強く、膨大なコンクリート柱を短時間で簡易に点検する方法として応用することが困難である。
【0005】
また、コンクリート柱は、その製造過程における厚みや弾性係数が異なり、また、建柱時に生じる根入れ長が異なるため、弾性波振動モードにばらつきが生じ、劣化状態の弾性波振動モードと比較するための健全状態の弾性波振動モードを定量的に求めることは困難である。
このため、弾性波振動モードを利用した損傷検知方法については、コンクリート柱の製造過程における厚みや弾性係数のばらつきや、建柱時に生じる根入れ長のばらつきに依存することなく損傷の有無、損傷程度および損傷方向を検知することが課題となっている。
【0006】
本発明は、このような問題点に鑑みてなされたものであり、本発明の目的は、目視以外の方法で、かつコンクリート柱等のような柱状構造物の製造過程などにおけるばらつきに依存することなく、短時間、低コストで柱状構造物の損傷の有無、損傷程度および損傷方向を検知することができる柱状構造物の損傷検知方法、損傷検知装置およびプログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の柱状構造物の損傷検知方法は、柱状構造物の地際から末口の間に設定した振動発生装置により柱状構造物全体を揺らす振動を水平一方向に発生させるステップと、前記柱状構造物全体を揺らす振動を、地際から末口の間の複数箇所に設置された受信センサにより時系列波形として円周方向別に受信するステップと、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、求めた円周方向別の卓越振動数の差のグラフを表示するステップと、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップとを含むことを特徴とする。
【0008】
また、本発明の柱状構造物の損傷検知方法は、柱状構造物の地際から末口の間に設定した振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させるステップと、前記柱状構造物全体を揺らす振動を、地際から末口の間の単一箇所または複数箇所に設置された受信センサにより時系列波形として円周方向別に受信するステップと、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、求めた円周方向別の卓越振動数の差のグラフを表示するステップと、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップとを含むことを特徴とする。
【0009】
また、本発明の柱状構造物の損傷検知方法において、前記周波数分布に置き換えるステップは、前記受信した円周方向別における時系列波形を、ウェーブレット変換により時間毎の周波数分布に置き換えるステップを含むことを特徴とする。
【0010】
また、本発明の柱状構造物の損傷検知方法において、前記加振方向振動が支配的となる時間領域は、前記振動発生装置により柱状構造物全体を揺らす振動を与えたときから0〜0.5秒であることを特徴とする。
【0011】
また、本発明の柱状構造物の損傷検知方法において、前記時系列波形を受信するステップは、前記柱状構造物全体を揺らす振動を、地際から末口の間の単一箇所に設置された受信センサにより受信し、単一箇所のセンサの受信情報から加振方向毎の振動をベクトル合成するステップを含むことを特徴とする。
【0012】
また、本発明の損傷検知装置は、振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサから受信する時系列波形取得手段と、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換える周波数分布取得手段と、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求める方向別卓越振動数差算出手段と、求めた円周方向別の卓越振動数の差のグラフを表示する表示手段と、円周方向別の卓越振動数の差を解析して損傷の有無、損傷の程度および損傷方向を判定する判定手段とを備えることを特徴とする。
【0013】
更に、本発明は、柱状構造物の損傷検知装置として構成するコンピュータに、振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサから受信するステップと、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、求めた円周方向別の卓越振動数の差のグラフを表示するステップと、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップとを実行させるためのプログラムとしての特徴を有する。
【発明の効果】
【0014】
本発明は、目視等の確認が難しい場合において、柱状構造物のばらつきに依存することなく、短時間、低コストで柱状構造物の損傷の有無、損傷の程度および損傷の方向を検知することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の柱状構造物の損傷検知方法の概要を示す図である。
【図2】本発明の柱状構造物の損傷検知方法における打撃加振装置を示す図である。
【図3】加振用打撃の方向を説明するコンクリート柱の断面図である。
【図4】打撃加振によるコンクリート柱の加振方向振動と自由振動の各領域が支配的となる時間を示す図である。
【図5】厚みが均一でないコンクリート柱の断面の一例を示す図である。
【図6】受信センサに接続される損傷検知装置の構成を説明する図である。
【図7】図6に示す損傷検知装置の動作を説明するフローチャートである。
【図8】加振方向が支配的となる時間領域のスカログラム卓越振動数と自由振動を含む時間領域のスカログラム卓越振動数の比較を加振角度別に示す図である。
【図9】損傷程度と損傷方向の卓越振動数変化を示す図である。
【図10】単一の受信センサで振動を受信し、水平2成分の情報から加振方向の振動をベクトル合成する場合について説明する図である。
【発明を実施するための形態】
【0016】
本発明の実施の形態について図面を参照して説明する。本発明の柱状構造物の損傷検知方法の概要を示す図である。本発明の柱状構造物の損傷検知方法は、柱状構造物である図1に示すコンクリート柱1の表面に加振点2を水平多方向に設定し、加振点2を加振することでコンクリート柱全体を水平多方向毎に振動させ、コンクリート柱1の地際から末口の間に設置された受信センサ3により、コンクリート柱1の損傷により生じる振動モードの変化を受信し、受信したデータから加振方向ごとに加振方向振動の周波数分布を算出し、その卓越振動数の変化より、損傷の有無、損傷の程度および損傷方向を検知するものである。
【0017】
受信センサ3には、加速度センサやマイクロフォンが用いられる。X軸をコンクリート柱の長尺方向とし、互いに直交するY軸、Z軸を、コンクリート柱の長尺方向(X軸方向)に対して直交する方向とし、受信センサ3によりY軸方向、Z軸方向の加速度を測定する。
【0018】
振動発生装置により加振するコンクリート柱1の表面の加振点2は、コンクリート柱1の地際から末口の間に設定され、振動発生装置としては、図2(a)に示す鉄球6や図2(b)に示す打突ハンマー7等の打撃加振装置が用いられる。鉄球6や打突ハンマー7等による打撃を用いて、図1に示すコンクリート柱全体を、図3の断面図に示すように、水平多方向毎(所定角度毎)に加振(打撃)して、水平多方向に振動させ、コンクリート柱1の地際から末口の間に設置された受信センサ3により、コンクリート柱1の損傷により生じる加振方向毎の振動モードの変化を受信し、受信センサ3に接続される損傷検知装置(図示せず)において、受信した円周方向別における時系列波形から時間毎の周波数分布に置き換え、加振方向別の卓越振動数の差の変化を読み取って、損傷の有無、損傷の程度および損傷方向を検知するものである。
ここで、振動モードとは、受信センサ3で、振動(加速度)を受信し、その振動(加速度)の周期、振幅からスペクトルに変換し、振幅の高い周波数帯を言う。
【0019】
図4は、コンクリート柱に加振を与えて受信センサで受信される時系列波形を示す図である。コンクリート柱1に加振を与えて受信センサで受信される時系列波形は、図4に示すように加振方向振動から自由振動へ変化し、振動が乱れ、収束する過程を捉えている。コンクリート柱に加振を与えた場合、例えば、コンクリート柱が、図5の断面図に示すように、偏心していて厚みが均一でない場合は、振動の時系列波形は、最初に加振方向の振動となり、その後にコンクリート柱の固有振動数で振動する自由振動へと変化する。すなわち、自由振動が支配的となっている時間領域の卓越振動数には、損傷有無のみならず添架物や柱の製造過程で生じる構造の特徴が混在する。そのため、損傷の検知を読み取るためには、図4に示す自由振動に変化する前の加振方向振動が支配的となっている時間領域の卓越振動数を使用する必要がある。この加振方向振動が支配的となる時間領域における卓越振動数数の変化により、コンクリート柱の損傷の有無をとらえることが可能である。
【0020】
加振方向振動が支配的となる時間領域は、コンクリート柱を加振してから0〜0.5秒とするのが望ましいが、0〜0.2秒は振動の乱れが大きいこと、0.4〜0.5秒は自由振動への過渡領域を含むことがあるので、0.2〜0.4とするのが更に望ましい。
【0021】
加振点2の高さは、コンクリート柱全体の振動が発生される位置である必要がある。加振点2は、コンクリート柱1の地際から末口の間に設定できるが、作業効率の観点から、作業員が立位で振動発生装置を設置可能で、かつ打撃可能な地際から1.5〜2.5m程度の位置が望ましい。
受信センサ3の受信位置の高さは、コンクリート柱全体の振動が受信される位置である必要があり、各種雑音の拾いやすい末口付近は避ける必要がある。受信センサ3は、コンクリート柱1の地際から末口の間に設置できるが、作業効率の観点から、作業員が立位で受信センサ3を設置可能で、かつ振動を受信可能な地際から1.5〜2.5m程度の位置が望ましい。
本発明では、作業上都合の良い高さ(地際から2m程度)に受信センサ3を設置し、作業上都合の良い高さ(地際から2m程度)で振動を与えることによって、コンクリート柱全体における損傷の有無を検知可能である。
【0022】
この発明の有効性を示すために、図1に示すコンクリート柱を対象とした円周方向加振による卓越振動数計測の実験を実施した。加振用打撃の位置および受信センサの位置は、地際から2.3mの位置とした。全長8mのコンクリート柱を対象に、水平多方向毎の加振によるコンクリート柱全体振動の加振方向振動と自由方向振動の卓越振動数の変化について損傷有無の特徴を確認した。
【0023】
実験から取得した損傷の無いコンクリート柱による加振方向振動の領域から抽出した卓越振動数と自由振動の領域から抽出した卓越振動数を図8に示す。この結果により、加振方向振動の領域から抽出した卓越振動数は自由振動の領域から抽出した卓越振動数と比較してばらつきが少ないことがわかる。
【0024】
実験による損傷のない場合の加振方向振動のスカログラムより抽出した方向別卓越振動数と同一コンクリート柱の鋼材1本切断および2本切断した場合の加振方向振動のスカログラムより抽出した方向別卓越振動数の比較グラフを図8に示す。損傷の無い場合の方向別卓越振動数の差は0.2Hz程度であり、鋼材1本損傷の方向別卓越振動数の差は0.4Hz程度であり、鋼材2本損傷の場合の方向別卓越振動数の差は3.3Hz程度となり、この方向別卓越振動数の変化により損傷の有無、損傷程度および損傷方向を検知することができる。
このように、本発明は、加振方向振動が支配的となる時間領域において、卓越振動数の差(抽出した卓越振動数の最低値を基準にした周波数差)を円周方向別に求め、この差がコンクリート柱のひび割れや亀裂、鋼材腐蝕や破断、柱自身の腐食や風化などの劣化による剛性の低下から変化することに基づいて、損傷の有無を検知し、卓越振動数の差の大きさから損傷の程度を検知し、卓越振動数の差の大きい方向から損傷の方向を検知することができる。
【0025】
図6は、受信センサに接続される損傷検知装置の構成を説明する図である。損傷検知装置10は、振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサ3から受信する時系列波形取得手段11と、受信した円周方向別における時系列波形を時間毎の周波数分布に置き換える周波数分布取得手段12と、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差(最低周波数の卓越振動数との周波数差)を円周方向別に求める方向別卓越振動数差算出手段13と、求めた円周方向別の卓越振動数の差のグラフを表示する表示手段14と、円周方向別の卓越振動数の差を解析して損傷の有無、損傷の程度および損傷方向を検知する判定手段15を備えている。損傷検知装置10は、コンピュータとして構成することができ、損傷検知装置10の各機能を実現する処理内容を記述したプログラムを、当該コンピュータの記憶部に格納しておき、当該コンピュータの中央演算処理装置(CPU)によってこのプログラムを読み出して実行させることで実現することができる。
【0026】
図7は、図6に示す損傷検知装置の動作を説明するフローチャートである。コンクリート柱1の地際から末口の間に設定した振動発生装置により水平多方向毎に加振(打撃)して、コンクリート柱全体を揺らす振動を水平多方向に発生させたときに、その振動を、地際から末口の間の単一箇所または複数箇所に設置された受信センサ3が受信し、受信センサ3が受信した振動の時系列波形を時系列波形取得手段11が取得する(ステップS101)。周波数分布取得手段12にて、受信した円周方向別における時系列波形からウェーブレット変換により時間毎の周波数分布に置き換え(ステップS102)、方向別卓越振動数差算出手段13にて、置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において、卓越振動数の差(最低周波数の卓越振動数との周波数差)を円周方向別に求める(ステップS103)。求めた円周方向別の卓越振動数の差のグラフを表示手段14に表示し(ステップS104)、判定部15にて、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定する(ステップS105)。
なお、表示手段14に表示したグラフの特徴から技術者が損傷の有無、損傷の程度および損傷の方向を判定するようにしても良い。
【0027】
図9は、水平多方向に発生させたコンクリート柱全体を揺らす振動を単一の受信センサで受信し、水平2成分の情報から加振方向毎の振動をベクトル合成する場合について説明する図である。図9の矢印で示す方向からコンクリート柱に加振を与え、受信センサ3にて、Y軸方向の加速度Yと、Z軸方向の加速度Zを測定し、加速度Yと加速度Zの合成加速度ベクトルを求め、その合成加速度ベクトルから加振方向の加速度ベクトルを求めることができる。
【0028】
なお、上述した実施の形態では、受信センサが1つの場合について説明したが、本発明は、受信センサをコンクリート柱の周囲表面上に複数個設置するようにしても良い。コンクリート柱の表面上に複数個の受信センサを設置した場合は、単一の受信センサの情報による検知よりも複数の受信センサから同時に検知することにより信頼性を向上させることができる。
また、コンクリート柱1の全周に渡って加振する必要はなく、半周に渡って加振してもよい。また、1方向に加振しても多方向にそれぞれ受信センサを設置することによって損傷を検知することが可能である。本発明は、1方向以上の加振により、受信した振動データから損傷の有無、損傷の程度および損傷方向を検知することができるものである。
【符号の説明】
【0029】
1 コンクリート柱
2 加振点
3 受信センサ
6 鉄球
7 打突ハンマー
10 損傷検知装置
11 時系列波形取得手段
12 周波数分布取得手段
13 方向別卓越振動数差算出手段
14 表示手段
15 判定手段
【特許請求の範囲】
【請求項1】
柱状構造物の地際から末口の間に設定した振動発生装置により柱状構造物全体を揺らす振動を水平一方向に発生させるステップと、
前記柱状構造物全体を揺らす振動を、地際から末口の間の複数箇所に設置された受信センサにより時系列波形として円周方向別に受信するステップと、
受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、
置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、
求めた円周方向別の卓越振動数の差のグラフを表示するステップと、
円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップと、
を含むことを特徴とする柱状構造物の損傷検知方法。
【請求項2】
柱状構造物の地際から末口の間に設定した振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させるステップと、
前記柱状構造物全体を揺らす振動を、地際から末口の間の単一箇所または複数箇所に設置された受信センサにより時系列波形として円周方向別に受信するステップと、
受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、
置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、
求めた円周方向別の卓越振動数の差のグラフを表示するステップと、
円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップと、
を含むことを特徴とする柱状構造物の損傷検知方法。
【請求項3】
前記周波数分布に置き換えるステップは、前記受信した円周方向別における時系列波形を、ウェーブレット変換により時間毎の周波数分布に置き換えるステップを含む、ことを特徴とする請求項1または2に記載の柱状構造物の損傷検知方法。
【請求項4】
前記加振方向振動が支配的となる時間領域は、前記振動発生装置により柱状構造物全体を揺らす振動を与えたときから0〜0.5秒である、ことを特徴とする請求項1乃至3のいずれか1項に記載の柱状構造物の損傷検知方法。
【請求項5】
前記時系列波形を受信するステップは、前記柱状構造物全体を揺らす振動を、地際から末口の間の単一箇所に設置された受信センサにより受信し、単一箇所のセンサの受信情報から加振方向毎の振動をベクトル合成するステップを含む、ことを特徴とする請求項2乃至4のいずれか1項に記載の柱状構造物の損傷検知方法。
【請求項6】
振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサから受信する時系列波形取得手段と、
受信した円周方向別における時系列波形を時間毎の周波数分布に置き換える周波数分布取得手段と、
置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求める方向別卓越振動数差算出手段と、
求めた円周方向別の卓越振動数の差のグラフを表示する表示手段と、
円周方向別の卓越振動数の差を解析して損傷の有無、損傷の程度および損傷方向を判定する判定手段と、
を備えることを特徴とする損傷検知装置。
【請求項7】
柱状構造物の損傷検知装置として構成するコンピュータに、
振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサから受信するステップと、
受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、
置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、求めた円周方向別の卓越振動数の差のグラフを表示するステップと、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップと、
を実行させるためのプログラム。
【請求項1】
柱状構造物の地際から末口の間に設定した振動発生装置により柱状構造物全体を揺らす振動を水平一方向に発生させるステップと、
前記柱状構造物全体を揺らす振動を、地際から末口の間の複数箇所に設置された受信センサにより時系列波形として円周方向別に受信するステップと、
受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、
置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、
求めた円周方向別の卓越振動数の差のグラフを表示するステップと、
円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップと、
を含むことを特徴とする柱状構造物の損傷検知方法。
【請求項2】
柱状構造物の地際から末口の間に設定した振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させるステップと、
前記柱状構造物全体を揺らす振動を、地際から末口の間の単一箇所または複数箇所に設置された受信センサにより時系列波形として円周方向別に受信するステップと、
受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、
置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、
求めた円周方向別の卓越振動数の差のグラフを表示するステップと、
円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップと、
を含むことを特徴とする柱状構造物の損傷検知方法。
【請求項3】
前記周波数分布に置き換えるステップは、前記受信した円周方向別における時系列波形を、ウェーブレット変換により時間毎の周波数分布に置き換えるステップを含む、ことを特徴とする請求項1または2に記載の柱状構造物の損傷検知方法。
【請求項4】
前記加振方向振動が支配的となる時間領域は、前記振動発生装置により柱状構造物全体を揺らす振動を与えたときから0〜0.5秒である、ことを特徴とする請求項1乃至3のいずれか1項に記載の柱状構造物の損傷検知方法。
【請求項5】
前記時系列波形を受信するステップは、前記柱状構造物全体を揺らす振動を、地際から末口の間の単一箇所に設置された受信センサにより受信し、単一箇所のセンサの受信情報から加振方向毎の振動をベクトル合成するステップを含む、ことを特徴とする請求項2乃至4のいずれか1項に記載の柱状構造物の損傷検知方法。
【請求項6】
振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサから受信する時系列波形取得手段と、
受信した円周方向別における時系列波形を時間毎の周波数分布に置き換える周波数分布取得手段と、
置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求める方向別卓越振動数差算出手段と、
求めた円周方向別の卓越振動数の差のグラフを表示する表示手段と、
円周方向別の卓越振動数の差を解析して損傷の有無、損傷の程度および損傷方向を判定する判定手段と、
を備えることを特徴とする損傷検知装置。
【請求項7】
柱状構造物の損傷検知装置として構成するコンピュータに、
振動発生装置により柱状構造物全体を揺らす振動を水平多方向に発生させたときの振動の時系列波形を、柱状構造物に設置された受信センサから受信するステップと、
受信した円周方向別における時系列波形を時間毎の周波数分布に置き換えるステップと、
置き換えられた周波数分布から加振方向振動が支配的となる時間領域を抽出し、加振方向振動が支配的となる時間領域において卓越振動数の差を円周方向別に求めるステップと、求めた円周方向別の卓越振動数の差のグラフを表示するステップと、円周方向別の卓越振動数の差を解析して損傷の有無、損傷程度および損傷方向を判定するステップと、
を実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−257261(P2011−257261A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−131755(P2010−131755)
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【出願人】(591280197)株式会社構造計画研究所 (59)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【出願人】(591280197)株式会社構造計画研究所 (59)
【Fターム(参考)】
[ Back to top ]