
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
【発明の詳細な説明】
【技術分野】
【0001】
本願発明は、市街地などを計測した計測点群から、街灯、電柱、標識といった柱状の物体を抽出する柱状物体抽出方法と、柱状の物体を自動抽出するための柱状物体抽出プログラム及び柱状物体抽出装置に関するものである。
【背景技術】
【0002】
近年、計測技術の進歩とともに地形情報(空間情報)の需要が高まっている。たとえば、道路上あるいは沿道に設置された施設をより高度に管理することを目的として、その形状や設置位置といった施設の空間情報を要望する管理者が増加している。特に、街灯や電柱、標識などのようにその外形が柱状である地物(以下、「柱状物体」という。)は、同形のものが多数設置されていることから通常は位置情報とともに管理されているが、設置位置だけでなく、施設高、付着物(看板や信号など)、その他周辺地物との位置関係などの空間情報も求められているところである。
【0003】
柱状物体の空間情報を取得する場合、これまでは実際に測量を行うかあるいは計画図等から抽出する方法が採られていた。つまり、あらかじめその地物が柱状物体であることを人が判断したうえで、測量等を行っていたわけである。したがって、多数の柱状物体に対して行うこれらの作業は、著しく時間や労力を要するばかりでなく、抽出漏れや誤りが生ずるなどその成果精度は必ずしも高いものとはならなかった。
【0004】
一方で、前述のとおり近年の計測技術は著しく進歩しており、従来に比べると高精度でしかも多量の計測データを同時取得できるようになってきた。その代表的な計測手段がレーザスキャナーによる計測で、計測対象物に対して毎秒数万発で照射したレーザ反射を利用して計測する技術であり、大量の計測データの同時取得が可能である。通常は、移動体にレーザスキャナーを搭載して移動しながら計測しており、これまでは航空機に搭載して空中から眼下の地形を計測するのが主流であった。昨今では、自動車に搭載し、道路上を移動しながら計測するモバイルマッピングシステム(Mobile Mapping System:MMS)という手法も多用されている。
【0005】
モバイルマッピングシステムによれば、路上あるいは沿道にあるあらゆる地物の計測データが取得される。当然ながら柱状物体を計測した結果も、モバイルマッピングシステムで計測された計測データ中に含まれており、この計測データを利用すれば柱状物体の空間情報(設置位置や形状など)を得ることができる。しかしながら、大量の計測データの中から柱状物体に該当するものを、目視など人の判断に従って抽出するとなると、従来にも増して時間や労力を必要とし、また数多くの抽出漏れや誤りが生ずることが予想される。
【0006】
大量の計測データの中から柱状物体の計測データを自動的に抽出できれば、人による作業は著しく軽減され人為的なミスも排除できることから、このような技術の確立が前出の管理者等から切望されている。
【0007】
そこで特許文献1では、レーザスキャナー計測で得られた計測点データをコンピュータで処理することで、柱状物体(本文献では「円筒形物」としている。)を自動検出する技術を提案している。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2010−286267
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1は、例えば電柱のように鉛直方向に同一断面が連続する物を計測した場合、その計測点(3次元座標)を水平面に射影すると、一定の形状(つまり電柱の断面形状)に計測点が集中するという特徴を利用した技術である。具体的には、水平面に射影した計測点に対して、あらかじめ用意しておいたテンプレートパターンと照合し、その照合結果を判断することで円筒形物を検出するものである。
【0010】
しかしながら特許文献1の手法では、検出したい円筒形物のテンプレートパターンを作成する手間が必要であり、しかもそのテンプレートパターンの良否によって検出精度が異なるという不安定さがある。また、鉛直方向に断面が変化する物は検出し難く、たとえ円柱形状であっても傾斜している物はやはり検出し難い、という点も指摘できる。さらに、検出したい円筒形物の形状を認識しておくことが必要であり、どのような柱状物体が存在しているか事前に把握できていない場合には、特許文献1の手法を採用することができない。
【0011】
本願発明の課題は、従来技術が抱える問題、すなわち、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体(あるいはその形状)を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【課題を解決するための手段】
【0012】
本願発明の柱状物体抽出方法は、地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、立設物のうちその形状が柱状である柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、それぞれのセグメントデータに対して立設物の形状特徴を明確にする細線化処理を行うことで立設物形状データを得る細線化工程と、立設物形状データを構成する形状構成点に対してそれぞれ主成分分析を行って固有値及び固有ベクトルを求めるとともに固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、形状構成点の特徴量に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。ここで、セグメンテーション工程は、任意計測点とこの点に近い近傍計測点との間でエッジを生成し、その結果得られる一つの連続成分を一つのセグメントデータとして得るものであり、細線化工程における細線化処理は、任意計測点の位置を移動させるものであって、任意計測点、近傍計測点、及び任意計測点における近傍計測点2点との挟角から求められる細線化強度に基づいて、移動後の任意計測点位置を求めるものである。
【0013】
本願発明の柱状物体抽出方法は、セグメンテーション工程を、任意計測点から近い順に所定数k個の近傍計測点を選出し、この近傍計測点と任意計測点との間でエッジを生成することでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとして得る工程とすることもできる。
【0014】
本願発明の柱状物体抽出方法は、主成分分析によって得られる固有値を、値の大きなものから順に、第一固有値、第二固有値、第三固有値とし、第一固有値に対応する固有ベクトルを第一固有ベクトル、第二固有値に対応するものを第二固有ベクトル、第三固有値に対応するものを第三固有ベクトルとした方法とすることもできる。この場合、特徴量は、第一固有値と第二固有値に基づいて算出される第一特徴量、第二固有値と第三固有値に基づいて算出される第二特徴量、第三固有値に基づいて算出される第三特徴量で構成され、形状分類は「柱状物体上の点」を含む2以上の分類で構成される。また、特徴量のうち第一特徴量が最大値を示す形状構成点には形状分類として「柱状物体上の点」が付与される。
【0015】
本願発明の柱状物体抽出方法は、立設物形状データを構成する形状構成点のうち「柱状物体上の点」に分類された形状構成点が占める割合、又は/及び「柱状物体上の点」に分類された形状構成点のうち第一固有ベクトルが鉛直又は鉛直に近い向きである形状構成点が占める割合に基づいて、立設物形状データの柱状物体度を求め、この柱状物体度を評価することで立設物の柱状判定を行う方法とすることもできる。
【0016】
本願発明の柱状物体抽出方法は、柱状物体判定工程が、隣接接続グラフ生成工程と、基本コンポーネント形成工程と、基本コンポーネント分類工程と、柱状物体セグメント作成工程を含んだ方法とすることもできる。この場合、隣接接続グラフ生成工程は、各形状構成点の固有ベクトルに基づいて、各形状構成点と隣接関係にある隣接点を求めるとともに、隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの隣接接続グラフとして得るものである。また、基本コンポーネント形成工程は、隣接接続グラフを構成する各形状構成点に対して、各形状構成点と同一の形状分類が付与された隣接点を求めるとともに、隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの基本コンポーネントとして得るものである。基本コンポーネント分類工程では、基本コンポーネントに対して形状分類に応じたコンポーンネントを分類するものであって、形状分類が「柱状物体上の点」である基本コンポーネントは「支柱コンポーネント」に分類する。柱状物体セグメント作成工程は、支柱コンポーネントを含む隣接接続グラフを抽出するとともに、隣接接続グラフに含まれる1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成するものである。このときの隣接点は、形状構成点から固有ベクトル方向に向けて拡張される空間範囲内において、形状構成点から最も近い形状構成点が選ばれる。
【0017】
本願発明の柱状物体抽出方法は、一つの隣接接続グラフ内に、その形状分類が「柱状物体上の点」である基本コンポーネントが2以上含まれる場合、形状分類が「柱状物体上の点」である基本コンポーネントのうち最小の標高値を具備するものを、「支柱コンポーネント」と分類する方法とすることもできる。
【0018】
本願発明の柱状物体抽出方法は、「地面コンポーネント」を除いたうえで、1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成する方法とすることもできる。この場合、第二特徴量が最大値を示す形状構成点に形状分類として「平面上の点」を付与し、形状分類が「平面上の点」である基本コンポーネントは「平面コンポーネント」に分類する。そして、平面コンポーネントを構成する形状構成点によって形成される面の法線方向に基づいて、略水平な平面コンポーネントを「地面コンポーネント」として抽出する。
【0019】
本願発明の柱状物体抽出方法は、「接続物コンポーネント」を除いたうえで、1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成する方法とすることもできる。この場合、形状分類が「柱状物体上の点」の基本コンポーネントであって、基本コンポーネントを構成する形状構成点の第一固有ベクトルが略水平な基本コンポーネントを「接続物コンポーネント」として抽出する。
【0020】
本願発明の柱状物体抽出方法は、帰属度に基づいて、柱状物体をさらに種別分けすることもできる。この場合、柱状物体セグメントを構成する基本コンポーネントのうち、支柱コンポーネント以外の基本コンポーネントであって、相互に連結された基本コンポーネントの組み合わせをパーツとして抽出し、このパーツを形状分類に基づくパーツタイプに分類し、柱状物体セグメントの高さ、柱状物体セグメントに含まれるパーツの数、及びパーツタイプに関する評価に基づいて、柱状物体セグメントの帰属度を求める。
【0021】
本願発明の柱状物体抽出方法は、支柱構成点を抽出したうえで、帰属度に基づいて柱状物体をさらに種別分けすることもできる。この場合、支柱候補点から所定距離内にある形状構成点と、この支柱候補点をまとめて支柱構成点とする。立設物形状データのうち、支柱構成点以外の形状構成点で構成される連続成分をパーツとして抽出し、このパーツを形状分類に基づくパーツタイプに分類し、立設物形状データの高さ、立設物形状データに含まれるパーツの数、及びパーツタイプに関する評価に基づいて、立設物形状データの帰属度を求める。
【0022】
本願発明の柱状物体抽出方法は、コンテクスト特徴量に基づいて柱状物体をさらに種別分けすることもできる。この場合、所定のグリッドによって複数のメッシュを構成するとともに、帰属度を最も近いメッシュに配点し、所定数のメッシュで構成されるエリアを設定し、このエリアに基づいて柱状物体の種類ごとに標準分布マップを作成する。さらに、エリアに基づき各柱状物体セグメント又は各立設物形状データに対して、周辺分布マップを作成し、標準分布マップ及び周辺分布マップに基づいて、当該柱状物体セグメント又は立設物形状データに対してコンテクスト特徴量を算出する。
【0023】
本願発明の柱状物体抽出プログラムは、地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、立設物のうちその形状が柱状である柱状物体を抽出する機能をコンピュータに実行させる柱状物体抽出プログラムであり、計測点群からそれぞれ独立した領域ごとにセグメントデータを作成するセグメンテーション機能と、それぞれのセグメントデータに対して立設物の形状特徴を明確にする細線化処理を行って立設物形状データを作成する細線化機能と、それぞれの形状構成点に対して主成分分析のための演算処理を行って固有値及び固有ベクトルを求める主成分分析機能と、さらにそれぞれの形状構成点に対して固有値を基に算出される特徴量に応じた形状分類を付与する形状分類機能と、形状構成点の特徴量に基づいて立設物の柱状判定処理を行う柱状物体判定機能を備えたものである。ここで、セグメンテーション機能は、任意計測点とこの点に近い近傍計測点との間でエッジを発生させ、その結果得られる一つの連続成分を一つのセグメントデータとするものであり、細線化機能で行われる細線化処理は、任意計測点の位置を移動させるものであって、任意計測点における近傍計測点2点との挟角を算出し、この挟角と任意計測点と近傍計測点とに基づいて、移動後の任意計測点位置を算出するものである。
【0024】
本願発明の柱状物体抽出プログラムは セグメンテーション機能を、任意計測点から近い順に所定数k個の近傍計測点を選出し、この近傍計測点と任意計測点との間でエッジを発生させることでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとする機能とすることもできる。
【0025】
本願発明の柱状物体抽出プログラムは 主成分分析機能によって求められる固有値を、値の大きなものから順に、第一固有値、第二固有値、第三固有値とし、同様に第一固有値に対応するものを第一固有ベクトル、第二固有値に対応するものを第二固有ベクトル、第三固有値に対応するものを第三固有ベクトルとしたプログラムとすることもできる。この場合、特徴量は、第一固有値と第二固有値に基づいて算出される第一特徴量と、第二固有値と第三固有値に基づいて算出される第二特徴量と、第三固有値に基づいて算出される第三特徴量で構成され、形状分類は、「柱状物体上の点」を含む2以上の分類で構成される。また、特徴量のうち第一特徴量が最大値を示す形状構成点には形状分類として「柱状物体上の点」を付与する。
【0026】
本願発明の柱状物体抽出プログラムは、立設物形状データを構成する形状構成点のうち「柱状物体上の点」に分類された形状構成点が占める割合、又は/及び「柱状物体上の点」に分類された形状構成点のうち固有ベクトルが鉛直又は鉛直に近い向きである形状構成点が占める割合に基づいて、立設物形状データの柱状物体度を算出し、この柱状物体度を評価することで立設物の柱状判定を行うものとすることもできる。
【0027】
本願発明の柱状物体抽出プログラムは、柱状物体判定機能が、隣接接続グラフ生成機能と、基本コンポーネント形成機能と、基本コンポーネント分類機能と、柱状物体セグメント作成機能を含んだものとすることもできる。この場合、隣接接続グラフ生成機能は、各形状構成点の固有ベクトルに基づいて、各形状構成点と隣接関係にある隣接点を選出するとともに、隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの隣接接続グラフとする。また、基本コンポーネント形成機能は、隣接接続グラフを構成する各形状構成点に対して、各形状構成点と同一の形状分類が付与された隣接点を選出するとともに、隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの基本コンポーネントとする。基本コンポーネント分類機能は、基本コンポーネントに対して形状分類に応じたコンポーンネント分類を付与するものであって、形状分類が「柱状物体上の点」である基本コンポーネントにはコンポーンネント分類として「支柱コンポーネント」を付与する。柱状物体セグメント作成機能は、支柱コンポーネントを含む隣接接続グラフを抽出するとともに、隣接接続グラフに含まれる1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成する。このときの隣接点は、形状構成点から固有ベクトル方向に向けて拡張される空間範囲内において、形状構成点から最も近い形状構成点が選ばれる。
【0028】
本願発明の柱状物体抽出プログラムは、一つの隣接接続グラフ内に、その形状分類が「柱状物体上の点」である基本コンポーネントが2以上含まれる場合、形状分類が「柱状物体上の点」である基本コンポーネントのうち最小の標高値を具備するものに、コンポーンネント分類として「支柱コンポーネント」を付与するものとすることもできる。
【0029】
本願発明の柱状物体抽出プログラムは、「地面コンポーネント」を除いたうえで、1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成するものとすることもできる。この場合、第二特徴量が最大値を示す形状構成点に形状分類として「平面上の点」を付与し、形状分類が「平面上の点」である基本コンポーネントには、コンポーンネント分類として「平面コンポーネント」を付与する。そして、平面コンポーネントを構成する形状構成点によって形成される面の法線方向に基づいて、略水平な平面コンポーネントを「地面コンポーネント」として抽出する。
【0030】
本願発明の柱状物体抽出プログラムは、「接続物コンポーネント」を除いたうえで、1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成するものとすることもできる。この場合、形状分類が「柱状物体上の点」の基本コンポーネントであって、基本コンポーネントを構成する形状構成点の第一固有ベクトルが略水平な基本コンポーネントを「接続物コンポーネント」として抽出する。
【0031】
本願発明の柱状物体抽出プログラムは、帰属度に基づいて柱状物体さらに種別分けするする柱状物体種別認識機能を備えたものとすることもできる。この場合、柱状物体セグメントを構成する基本コンポーネントのうち、支柱コンポーネント以外の基本コンポーネントであって、相互に連結された基本コンポーネントの組み合わせをパーツとして抽出するパーツ抽出機能と、パーツを形状分類に基づくパーツタイプに分類するパーツタイプ分類機能と、柱状物体セグメントの高さ、柱状物体セグメントに含まれるパーツの数、及びパーツタイプに関する評価に基づいて、柱状物体セグメントの帰属度を算出する帰属度算出機能を併せて備える。
【0032】
本願発明の柱状物体抽出プログラムは、支柱構成点抽出機能を備えるとともに、帰属度に基づいて柱状物体さらに種別分けするする柱状物体種別認識機能を備えたものとすることもできる。この場合、支柱構成点抽出機能は、立設物形状データのうち、「柱状物体上の点」に分類された形状構成点であって、第一固有ベクトルが略鉛直方向である形状構成点を支柱候補点とし、支柱候補点から所定距離内にある形状構成点と、支柱候補点をまとめて支柱構成点とするものである。また、立設物形状データのうち、支柱構成点以外の形状構成点で構成される連続成分をパーツとして抽出するパーツ抽出機能と、パーツを形状分類に基づくパーツタイプに分類するパーツタイプ分類機能と、立設物形状データの高さ、立設物形状データに含まれるパーツの数、及びパーツタイプに関する評価に基づいて、立設物形状データの帰属度を算出する帰属度算出機能を併せて備える。
【0033】
本願発明の柱状物体抽出プログラムは、コンテクスト特徴量に基づいて柱状物体の種類を選別する柱状物体種別認識機能を備えたものとすることもできる。この場合、所定のグリッドによって複数のメッシュを構成するとともに、帰属度を最も近いメッシュに配点する帰属度配点機能と、所定数のメッシュで構成されるエリアを設定するエリア設定機能と、エリアに基づいて、柱状物体の種類ごとに標準分布マップを作成する標準分布マップ作製機能と、エリアに基づき各柱状物体セグメント又は各立設物形状データに対して、周辺分布マップを作成する周辺分布マップ作製機能と、さらに、標準分布マップ及び周辺分布マップに基づいて、当該柱状物体セグメント又は立設物形状データに対して、コンテクスト特徴量を算出するコンテクスト特徴量算出機能を併せて備える。
【0034】
本願発明の柱状物体抽出装置は、地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、立設物のうちその形状が柱状である柱状物体を抽出する柱状物体抽出装置であり、所定空間を計測して計測点群を取得する計測手段と、計測手段によって取得された計測点群を記憶する記憶手段と、計測点群を基に立設物のうち柱状物体を抽出する演算処理手段を備えたものである。さらに演算処理手段は、セグメンテーション機能と、細線化機能と、主成分分析機能と、形状分類機能と、柱状物体判定機能を備えている。ここで、セグメンテーション機能は、計測点群から、それぞれ独立した領域ごとにセグメントデータを作成するものであって、任意計測点から近い順に所定数k個の近傍計測点を選出し、この近傍計測点と任意計測点との間でエッジを発生させることでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとするものであり、細線化機能は、それぞれのセグメントデータに対して、立設物の形状特徴を明確にする細線化処理を行って立設物形状データを作成するものであり、主成分分析機能は、それぞれの形状構成点に対して、主成分分析のための演算処理を行って固有値及び固有ベクトルを求めるものであり、形状分類機能は、それぞれの形状構成点に対して、固有値を基に算出される特徴量に応じた形状分類を付与するものであり、柱状物体判定機能は、形状構成点の特徴量に基づいて立設物の柱状判定処理を行うものであり、細線化機能で行われる細線化処理は、任意計測点の位置を移動させるものであって、任意計測点における近傍計測点2点との挟角を算出し、この挟角と任意計測点と近傍計測点とに基づいて、移動後の任意計測点位置を算出するものである。
【発明の効果】
【0035】
本願発明の柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置には、次のような効果がある。
(1)大量の計測点群の中から、目視など人の判断を介することなく、柱状物体を自動抽出するので、人為的なミスが排除されて漏れなく抽出できるうえ、極めて短時間で抽出結果を得ることができる。
(2)任意計測点における近傍計測点2点との挟角から求められる細線化強度に基づいて細線化処理を行うので、柱状物体の端点や枝分かれ点は保持した(点移動が少ない)まま細線化され、この結果、形状を正確に表現しつつ形状特徴を明確にすることができる。したがって、正確に柱状物体を抽出することができる。
(3)セグメンテーションを行う際、任意計測点から近い順にk個の近傍計測点を選出してk近傍接続グラフを作成することとすれば、セグメンテーションの処理時間が短縮され、ひいては柱状物体を抽出する処理のさらなる高速化を図ることができる。
(4)主成分分析や、固有値を基に算出される特徴量に応じた形状分類といった概念を用いることによって、様々な太さや傾きの柱状物体でも抽出することができる。
(5)柱状物体からパーツを抽出し、これをパーツ分類することで、柱状物体をさらに電柱、街灯、標識など詳細な分類に分けることができる。
【図面の簡単な説明】
【0036】
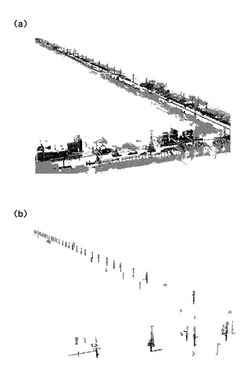
【図1】(a)は市街地全体の地形を表す全体モデル図、(b)は抽出された柱状物体のみを表す柱状物体モデル図。
【図2】本願発明の手順およびそのながれを示すフロー図。
【図3】第1の実施形態の手順およびそのながれを示すフロー図。
【図4】任意計測点の近傍計測点を検出する考え方を示す説明図。
【図5】任意計測点と近傍計測点とからなる挟角を説明するモデル図。
【図6】分散共分散行列作成するために用いられる要素を説明するためのモデル図。
【図7】近傍形状構成点集合の点分布状態と第1固有ベクトルを示すモデル図。
【図8】立設物が鉛直柱と水平柱と平板で構成される案内標識である場合に、形状構成点に対して形状分類を付与したモデル図。
【図9】立設物が鉛直柱と水平柱と平板で構成される案内標識である場合に、形状構成点に対して形状分類を付与し、さらに第1固有ベクトルを加味して分類したモデル図。
【図10】第2の実施形態の手順およびそのながれを示すフロー図。
【図11】形状構成点における隣接点を探索する状況を具体的に説明したモデル図。
【図12】(a)は形状分類が「柱状物体上の点」の場合に選択される固有ベクトルを示すモデル図、(b)は形状分類が「平面上の点」の場合に選択される固有ベクトルを示すモデル図、(c)は形状分類が「その他物体上の点」の場合に選択される固有ベクトルを示すモデル図。
【図13】異なる基本コンポーネントが複数生成された状態を示すモデル図。
【図14】接続物コンポーネントを示すモデル図。
【図15】支柱コンポーネントの断面形状が略円形の一部を形成していることを示すモデル図。
【図16】柱状物体を種別分類する手順を示すフロー図。
【図17】基本コンポーネントの形状分類や、組み合わせに基づいて分類されたパーツタイプの例を示すモデ図。
【図18】電柱、街灯、標識ごとに帰属度の算出方法を示す説明図。
【図19】コンテクスト特徴量に基づいて柱状物体の種別を分類する手順を示すフロー図。
【図20】着目する柱状物体セグメントを中心に、設定したエリア範囲で形成されるメッシュを示すモデル図。
【図21】3種類の周辺分布マップを示すモデル図。
【図22】コンテクスト特徴量の算出方法を示すモデル図。
【図23】コンテクスト特徴量を算出した具体例を示すモデル図。
【発明を実施するための形態】
【0037】
本願発明の柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置の実施形態の例を図に基づいて説明する。
【0038】
1.全体概要
図1は、市街地を計測した全体地形から柱状物体を抽出した状態を示すモデル図で、(a)は市街地全体の地形を表す全体モデル図であり、(b)は抽出された柱状物体のみを表す柱状物体モデル図である。なお、図1(a)の全体モデル図は、市街地の所定範囲を計測した計測点の集合(以下、「計測点群」という。)を鳥瞰図として示した図である。このように、本願発明は地形全体の地物から柱状物体を抽出するものである。
【0039】
計測点群を構成する計測点は、例えばレーザスキャナーを搭載した自動車で市街地の所定範囲を移動しながら計測して得ることができる。この計測点は、平面座標と高さからなる3次元座標(X,Y,Z)である。もちろんこの計測点を、緯度、経度、標高で表すこともできる。また、計測点を得る手法として、車載型レーザスキャナーを用いた手法(いわゆるMMS)に限らず、航空機にレーザスキャナーを搭載して計測する手法を用いることもできるし、レーザスキャナーを用いることなくTS(トータルステーション)等を利用した従来計測手法を採用することもできる。また、必ずしも本願発明のために計測する必要はなく、既存の計測点を利用することができるのは言うまでもない。
【0040】
レーザスキャナーを用いると、通常、1回の計測で多数の計測点を得る。記述のとおり、この多数の計測点の集合が「計測点群」である。すなわち図1(a)の全体モデル図は、市街地全体の計測点群を鳥瞰図として表示した図といえる。なお、ここで対象としている空間は市街地の所定範囲であるが、本願発明を実施する上で、複数の立設物を含む空間であれば対象空間が市街地である必要はない。
【0041】
図2は、本願発明の概要を示すフロー図である。この図に沿って、各手順(ステップ)とその流れについて説明する。まず市街地の計測結果である計測点群を用意する。この計測点群の中には、ある程度独立した計測点の「かたまり」が含まれている。この「かたまり」は、地面上に立設された(地面上に立ち上がった)地物(以下、「立設物」という。)と考えられ、この立設物を含む所定の領域をセグメントとして区分するのがセグメンテーションである(S02)。なお便宜上、所定領域ごとに区分された計測点の集合を「セグメントデータ」という。
【0042】
次に、各セグメントデータに対して細線化処理を行う(S03)。これは、立設物の形状(外形)の特徴を明確にするもので、例えば電柱を計測した場合、電柱以外の計測点や誤差のある計測点が含まれるがこれを調整することによって本来の電柱の形状に近づける処理である。ここでは、セグメントデータを細線化処理して得られた結果を「立設物形状データ」と呼び、さらに細線化処理によって計測点を調整したもの(つまり立設物形状データを構成する各点)を「形状構成点」と呼ぶこととする。
【0043】
つづいて各形状構成点に対して主成分分析を行い、その立設物形状データに対応する立設物の向き(軸方向)を求め、さらに主成分分析の結果得られる固有値に基づいて各形状構成点の特徴量を算出する(S04)。この特徴量は、立設物の形状特徴を表す値であり、特徴量に応じてあらかじめ定めておいた形状分類を付与することができる(S05)。
【0044】
各形状構成点に対して形状分類が付与されると、この形状分類を利用して柱状物体を認識することが可能となり、結果的に、市街地全体の地物から柱状物体のみを抽出することが可能となる。
【0045】
形状分類を利用して柱状物体を認識する手法は、大別すると3種類に分けられ、ここではそれぞれ「第1の実施形態」、「第2の実施形態」、「第3の実施形態」として説明することとする。以下、各実施形態について要素ごとに詳述する。
【0046】
2.第1の実施形態
本願発明の第1の実施形態の例を、図に基づいて説明する。図3は、第1の実施形態の概要を示すフロー図である。以下、このフロー図に沿って各手順(ステップ)を説明する。
【0047】
(地面点の除去)
計測点群が、地面を計測した計測点(以下、「地面点」という。)を含む場合、この地面点を計測点群から取り除く(S01)。これは、後に説明するセグメンテーションを行う際に、独立した(つまり他とは連続性のない)計測点のかたまりを必要とするからである。したがって、計測点群に地面点が含まれない場合は、ここでの処理を実施する必要はない。
【0048】
計測点群から地面点を除く処理は、従来から用いられている手法によることが可能である。一例として、リージョングローイング(領域拡張)を挙げることができる。これは、任意の地面点を指定すると、その点から所定勾配(鉛直勾配)にある点を地面点として選出していくもので、指定した地面点から平面的に広げていって「地面」を特定する手法である。なお、計測点群から地面点を除去して得られる計測点の集合は、立設物を計測した計測点の集合と考えることができるので、これを特に「立設物計測点群」ということとする。
【0049】
(セグメンテーション)
セグメンテーションは、無秩序に配置された立設物計測点群に対して、立設物ごとに分離(セグメント化)する処理である(S02)。これは、一つの立設物を計測した複数の計測点は、それぞれ近い位置にあるという考えに基づくものであり、任意の計測点(任意計測点i)から近傍にある計測点(近傍計測点j)を検出し、これを次々に派生させていくことでセグメントを形成していくものである。この結果、得られるものがセグメントデータであり、基本的には対象空間内に含まれる立設物の数だけセグメントデータが得られる。
【0050】
セグメンテーションについてさらに詳しく説明する。図4は、任意計測点iの近傍計測点jを検出する考え方を示す説明図である。なお紙面の都合上、図4は2次元に見えるが、あくまで3次元の概念を示すものである。近傍計測点jの検出は、任意計測点iから所定距離内にあるすべての点とすることもできるが、以降の処理速度を考えると、近傍計測点jは近傍数k個以内にとどめるとよい。図4では、近傍数kを8個としており、近傍計測点j1〜j8を検出している。この場合、近傍数k個の近傍計測点jは任意計測点iから近い順に選ばれる。もちろん近傍数kは、適宜設計して定めることができる。
【0051】
また、近傍計測点jの選出条件として限界距離を設けることもできる。すなわち、図4に示すように、任意計測点iを中心に半径rの球を描き、この範囲内にある計測点のうち近い順に近傍数k(図では8個)分だけ近傍計測点jを検出する。したがって、限界距離の範囲内(半径rの球の範囲内)にある計測点が少ない場合は、近傍数k未満の近傍計測点jが検出されることとなる。
【0052】
任意計測点iに対する近傍計測点jを検出する際、すべての計測点を対象に条件照合することもできるが、ここでの検出処理時間を短縮するため、従来から用いられているkd木と呼ばれる手法を採用することもできる。
【0053】
任意計測点iにおける近傍計測点jが検出されると、当該任意計測点iとすべての近傍計測点jとを関連付ける。具体的には、任意計測点iと近傍計測点jでエッジ(リンク)を生成させる。図4では、(i,j1)〜(i,j8)の8個のエッジが生成されることとなる。
【0054】
一つの任意計測点iについてエッジ生成処理まで終わると、他の計測点を任意計測点として同様の処理を行っていく。これを繰り返し行うと、近傍にある計測点同士が集合し、これを一つの連続成分として得ることができる。すなわちここで得られた一つの連続成分が、一つの立設物に対応するセグメントデータである。また、このようにして立設物計測点群から複数のセグメントデータが得られた結果が接続グラフと呼ばれるものであり、特に近傍数kの近傍計測点jを検出して得られた結果が「k近傍接続グラフ」である。
【0055】
(細線化処理)
細線化処理はスムージングとも呼ばれるもので、立設物の形状の特徴を明確化するものである(S03)。セグメントデータを構成する計測点の中には、立設物以外を計測した計測点や、誤差のある計測点が含まれる。このような計測点を調整することで本来の電柱の形状に近づける処理が細線化処理であり、セグメントデータを構成する計測点を徐々に移動させて調整するものである。
【0056】
細線化処理はこれまでも行われてきた手法であるが、本願発明は柱状物体を抽出するという点に着目しており、細線化強度(スムージング強度)という概念を取り入れたことが一つの特徴である。具体的には、以下の数式に従って計測点を徐々に移動させていく処理である。
【数1】

【0057】
上記数式は、任意の計測点である任意計測点iをi’に調整(移動)させるものであり、piは細線化処理前(移動前)の任意計測点iの座標、pjは任意計測点iの近傍計測点jの座標、p’iは細線化処理後(移動後)の座標である。また、i* は任意計測点iの近傍計測点jの集合(以下、「近傍点集合」という。)、qは任意計測点iの近傍計測点であってjとは異なる点、Vi
は近傍計測点の組み合わせ(j,q)の点対集合である。
【0058】
上記数式で示されるように、細線化処理後のp’iは、任意計測点iの座標、近傍計測点jの座標、細線化強度λ、及び重みωij
に基づいて(これらを変数として)求められる。また、細線化強度λは、点対集合Viの点対数((j,q)の組み合わせ数)である|Vi|、任意計測点iを中心とした近傍計測点jと近傍計測点qからなる挟角であるangle(j,i,q)に基づいて求められる。なお重みωij
は、piとpj点との距離である||pj−pi||の逆数に基づいて求められる正値であり、遠い位置にある近傍計測点の影響を抑制している。
【0059】
図5は、任意計測点と近傍計測点とからなる挟角θ(つまりangle(j,i,q))を説明するモデル図である。この図に示すように、立設物の端部に位置する端点に近いほど挟角θが小さな値をとることがわかる。言い換えれば、細線化強度λが小さな値を取ることであり、この結果、任意計測点piの影響を強く残し、近傍計測点pjの影響が抑制される。したがって、立設物を構成する端点や枝分かれ点は、細線化処理によってあまり座標移動することがなく、すなわち端点や枝分かれ構造が保持されたまま細線化処理されることとなる。
【0060】
基本的に細線化処理は、セグメントデータを構成するすべての計測点に対して行われ、そしてすべてのセグメントデータに対して行われる。また、図3のフローに示すように、すべてのセグメントデータ(図ではm個のセグメントデータ)に対する細線化処理を1回とし、これを複数回(図ではn回)繰り返すと、立設物の形状特徴をより明確化できるので好適である。細線化処理の繰り返し回数nは、適宜設計することができる。
【0061】
以上のように、計測点を細線化処理することで形状構成点I(p’i)が得られ、すなわちセグメントデータを細線化処理することで立設物形状データ(形状構成点Iの集合)が得られる。
【0062】
(形状分類の付与)
細線化処理で得られた形状構成点Iは、立設物の形状を構成するものであり、局所的な点分布状態によりそれぞれこの形状に与える影響度が相違する。この局所的な点分布状態は、次式により形状構成点Iの分散共分散行列MIを作成することで、定量的に評価することができる(S04)。
【数2】
【0063】
上記数式で、PJは形状構成点Iの近傍(セグメンテーションで説明した近傍計測点の選出方法と同様に選出)である近傍形状構成点Jの座標値、I*は形状構成点Iの近傍形状構成点Jの集合(近傍形状構成点集合)、PIOはI*の重心座標値である。なお図6は、分散共分散行列MIを作成するために用いられる要素PI,I*,PIOを説明するためのモデル図であり、図中に示すPIは形状構成点Iの座標値である。
【0064】
分散共分散行列MIを作成することで、近傍形状構成点集合I*の固有値γI及びこれに対応する固有ベクトルeIが得られる。また、近傍形状構成点集合I*は3次元的な分布を表しているので、3つの固有値、すなわち第1固有値γI1,第2固有値γI2,第3固有値γI3(γI1≧γI2≧γI3)と、それぞれの固有値に対応する第1固有ベクトルeI1,第2固有ベクトルeI2,第3固有ベクトルeI3が得られる。このうち第1固有ベクトルeI1は、近傍形状構成点集合I*の主方向(主軸方向)を示す。図7は、近傍形状構成点集合I*の点分布状態と第1固有ベクトルeI1(主方向)を示すモデル図である。なおこの図では、第1固有ベクトルeI1と第2固有ベクトルeI2のみ示しており、図面垂直方向に示される第3固有ベクトルeI3は省略している。
【0065】
近傍形状構成点集合I*の固有値γIが得られると、次にこれに基づいて3つの特徴量SI、すなわち第1特徴量SI1,第2特徴量SI2,第3特徴量SI3を算出する。それぞれの特徴量は、SI1=γI1−α・γI2,SI2=γI2−γI3,SI3=β・γI3で求められる。ここで、αとβは計測手段に応じた補正係数で、適宜設定することができる。実験例としては、αとβともに整数とし、αをβよりも小さな値とすると好適な結果(柱状物体の高い認識率)が得られた。
【0066】
3つの特徴量SIを得るとこれらの大小関係から、形状構成点Iに形状分類を付与することができる(S05)。例えば、第1特徴量SI1が最大であれば形状構成点Iに「柱状物体上の点」という形状分類を付与し、第2特徴量SI2が最大であれば形状構成点Iに「平面上の点」という形状分類を付与し、第3特徴量SI3が最大であれば形状構成点Iに「その他物体上の点」という形状分類を付与することが例示できる。
【0067】
図8は、立設物が鉛直柱と水平柱と平板で構成される案内標識である場合に、形状構成点Iに対して形状分類を付与したモデル図である。この図に示す第1エリアでは、第1特徴量SI1が最大となり、ここにある形状構成点Iには「柱状物体上の点」という形状分類が付与されることとなる。また、第2エリアでは、第2特徴量SI2が最大となり、ここにある形状構成点Iには「平面上の点」という形状分類が付与されることとなる。なお、基本的に形状分類の付与は、立設物形状データを構成するすべての形状構成点Iに対して行われ、そしてすべての立設物形状データに対して行われる。
【0068】
(立設物の柱状判定)
ここまでの手順で立設物の計測点が、セグメントデータとなり、立設物形状データとなって、それぞれの形状構成点Iに対しては形状分類が付与される。この結果に基づいて、最終的に当該立設物の柱状判定を行う。
【0069】
図9は、立設物が鉛直柱と水平柱と平板で構成される案内標識である場合に、形状構成点Iに対して形状分類を付与し、さらに第1固有ベクトルeI1を加味して分類したモデル図である。この図で、Ssは案内標識の形状構成点Iの集合を示し、Csは構成点集合Ssのうち「柱状物体上の点」という形状分類が付与された形状構成点Iの集合を示し、Dsは柱状点集合Csのうち第1固有ベクトルeI1が鉛直又は鉛直に近い向きとなる形状構成点Iの集合を示している。なお、「鉛直に近い向き」とは、第1固有ベクトルeI1と鉛直方向となす角が閾値(例えば30度)以内とすることができる。
【0070】
立設物の柱状判定は、構成点集合Ss、柱状点集合Cs、鉛直点集合Dsに基づいて求められる柱状物体度を評価することで行うことができる(S06)。柱状物体度は、一例として次式によって定めることができる。
【数3】
【0071】
上記数式で、fsは柱状物体度、|Ss|は構成点集合Ssに含まれる形状構成点Iの数、|Cs|は柱状点集合Csに含まれる形状構成点Iの数、|Ds|は鉛直点集合Dsに含まれる形状構成点Iの数、w1,w2は重みである。この式では柱状物体度fsを、|Ss|のうち|Cs|が占める割合、及び|Cs|のうち|Ds|が占める割合に基づいて算出しているが、|Ss|のうち|Cs|が占める割合のみから算出することも、|Cs|のうち|Ds|が占める割合のみから算出することもできる。なお、重みw1,w2ともに整数とし、重みw1を重みw2よりも小さな値とした実験例で、好適な結果(柱状物体の高い認識率)が得られた。
【0072】
上記数式によれば柱状物体度fsは百分率で表され、大きな値を示すほど柱状物体であると評価できることがわかる(S07)。例えば、柱状物体度閾値τを設定し、柱状物体度fsが柱状物体度閾値τよりも大きな値を示す立設物を柱状物体と認識することができる。そして、この柱状物体度fsに基づく柱状判定によって、大量の計測点群から柱状物体を抽出することが可能となる。なお、柱状物体を抽出する段階で、立設物形状データの高さが所定高さ(例えば2m)以下のものや、立設物形状データを構成する形状構成点数|Ss|が所定値(例えば50点)以下のものは、柱状物体度fsにかかわらず柱状物体として認識しないとするなど、状況に応じた柱状判定とすることもできる。
【0073】
(方法、プログラム、装置)
以上説明した手順を行うことで、本願発明である柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を実施することができる。具体的には、地面点を除去する「地面除去工程」(場合によって省略可)、セグメントデータを得る「セグメンテーション工程」、細線化処理を行うことで立設物形状データを得る「細線化工程」、形状構成点Iに対して形状分類を与える「形状分類工程」、立設物の柱状判定を行う「柱状物体判定工程」を順に行うことで柱状物体抽出方法が実施できる。また、地面点を除去する「地面除去機能」(場合によって省略可)、セグメントデータを得る「セグメンテーション機能」、細線化処理を行うことで立設物形状データを得る「細線化機能」、形状構成点Iに対して固有値等を求める「主成分分析機能」、形状構成点Iに対して形状分類を与える「形状分類機能」、立設物の柱状判定を行う「柱状物体判定機能」を備え、これら機能をコンピュータに実行させるものとすることで柱状物体抽出プログラムを得ることができる。さらに、計測手段と計測点群を取得する「計測手段」、この計測点群やプログラム等を記憶するハードデスク等の記憶領域を備えた「記憶手段」、柱状物体抽出プログラムを実行させるコンピュータ等の「演算処理手段」を備えたものとすることで「柱状物体抽出装置」を得ることができる。
【0074】
3.第2の実施形態
本願発明の第2の実施形態の例を、図に基づいて説明する。図10は、第2の実施形態の概要を示すフロー図である。以下、このフロー図に沿って各手順(ステップ)を説明する。なお本実施形態では、必ずしもセグメンテーション(S02)を実施する必要がなく、このステップを省略することもできる。セグメンテーション(S02)を省略した場合、当然ながら細線化処理(S03)はm個のセグメントに対して行うことはなく、対象の計測点群全体に対して行うことになる。セグメンテーション(S02)〜形状分類の付与(S05)に関しては、本実施形態でも「第1の実施形態」と同様の内容となるため、ここでの説明は省略する。
【0075】
(地面点の除去)
計測点群が地面点を含む場合、本実施形態でも「第1の実施形態」と同様、この地面点を計測点群から取り除く処理を(S01)行ってもよい。しかしながら本実施形態では、後に説明するように、地面を取り除く処理を行うこともできるので、必ずしもここで地面点の除去の処理を実施する必要はない。
【0076】
(隣接接続グラフの生成)
ここでは、形状分類の付与された形状構成点Iどうしを連結していき、隣接接続グラフを得る処理を行う。形状構成点Iどうしを連結する際は、まず任意の形状構成点Iに着目し、その形状構成点Iにおける隣接点を探索する(S08)。そして、探索された隣接点と当該形状構成点Iでエッジを生成する。この処理を、それぞれの形状構成点Iに対して行うことで、隣接接続グラフを生成する(S09)。
【0077】
形状構成点Iにおける隣接点は、その形状構成点Iの固有ベクトルに基づいて探索される。図11は、形状構成点Iにおける隣接点を探索する状況を具体的に説明したモデル図である。この図に示すように隣接点は、形状構成点Iを中心として固有ベクトル方向に所定の広がりを有する空間範囲内で探索される。具体的には、形状構成点Iを頂点とし、中心線である固有ベクトルeIから所定角度(図ではθ)を持った円錐状の中で、隣接点は探索される。さらに、形状構成点Iから距離閾値δ以内(つまり、形状構成点Iが中心で、半径δの球体内)にあることを条件に加え、この空間範囲内で形状構成点Iに最も近い他の形状構成点Iを隣接点として選出することもできる。
【0078】
なお、形状構成点Iにおける隣接点を探索する際、その形状分類に応じて所定の固有ベクトルが選択される。記述のとおり、形状分類は特徴量SIに基づいて設定され、例えば「柱状物体上の点」、「平面上の点」、「その他物体上の点」に分類される。図12は、形状構成点Iの形状分類に応じて選択される固有ベクトルを示すモデル図で、(a)は形状分類が「柱状物体上の点」の場合に選択される固有ベクトルを示すモデル図、(b)は形状分類が「平面上の点」の場合に選択される固有ベクトルを示すモデル図、(c)は形状分類が「その他物体上の点」の場合に選択される固有ベクトルを示すモデル図である。この図に示すように、形状分類が「柱状物体上の点」の場合は、第1固有ベクトルeI1(主方向)のみが選択され、すなわち形状構成点Iから2方向(図では左右の方向)にそれぞれ円錐状の空間が設定され、それぞれ所定の範囲内から隣接点が(つまり最大2点の隣接点が)抽出される。同様に、形状分類が「平面上の点」の場合は、第1固有ベクトルeI1(主方向)と第2固有ベクトルeI2が選択され、すなわち形状構成点Iから4方向(図では上下左右の4方向)にそれぞれ円錐状の空間が設定され、それぞれ所定の範囲内から隣接点が(つまり最大4点の隣接点が)抽出される。また、形状分類が「その他物体上の点」の場合は、第1固有ベクトルeI1(主方向)、第2固有ベクトルeI2、及び第3固有ベクトルeI3が選択され、すなわち形状構成点Iから6方向にそれぞれ円錐状の空間が設定され、それぞれ所定の範囲内から隣接点が(つまり最大6点の隣接点が)抽出される。
【0079】
(基本コンポーネントの形成)
ここでは、同じ形状分類が付与された形状構成点Iどうしを連結していき、一つの連続成分を基本コンポーネントして得る処理を行う(S10)。形状構成点Iどうしを連結する際は、まず任意の形状構成点Iに着目し、その形状構成点Iにおける隣接点を探索し、その隣接点が同じ形状分類であればエッジを生成して一つの領域を構築する。続いて、追加された隣接点を新たな形状構成点Iとして着目し、同様の処理で隣接点をその領域に追加する。そして、同じ形状分類が付与された隣接点が探索されなくなるまで、隣接点の追加を繰り返し行い、その結果得られる一つの領域(連続成分)が基本コンポーネントである。このように、任意の点から所定条件を基に領域を広げていく手法は領域成長法とも呼ばれ、つまり基本コンポーントは領域成長法を用いて生成される。
【0080】
図13は、異なる基本コンポーネントが複数生成された状態を示すモデル図である。この図に示すように、異なる形状分類をもつ領域ごとに基本コンポーネントが生成され、また異なる基本コンポーネントどうしであっても、隣接関係がある(隣接点となる条件を満たす)形状構成点Iどうしはエッジが生成される。
【0081】
(基本コンポーネントの分類)
基本コンポーネントの分類では、その特性に応じて基本コンポーネントを分類する処理を行う(S11a〜S11d)。ここでは、地面を形成している地面コンポーネント、電線など接続物を形成している接続物コンポーネント、支柱を形成している支柱コンポーネント、壁面を形成している壁面コンポーネントについて説明する。
【0082】
地面点に基づく地面コンポーネントは柱状物体を構成するものではなく、したがって柱状物体を的確に抽出する場合、地面コンポーネントは取り除くことが望ましい。基本コンポーネントの中から地面コンポーネントを認識するには、以下の条件等に基づいて行う。地面コンポーネントは面状であることから、形状分類が「平面上の点」である基本コンポーネントを選択する。そして、その基本コンポーネントが略水平であるものを地面コンポーネントとして認識する(S11a)。このとき、基本コンポーネントを構成する形状構成点Iの数が一定数以上とすることも条件に加えることができる。
【0083】
基本コンポーネントが略水平であるか否かの判定は、その基本コンポーネントを構成する形状構成点Iに基づいて行うことができる。すなわち、隣接する形状構成点Iどうしを連結して三角形の面を多数形成する。すると、形状構成点Iの周囲には複数の三角面が存在し、それら三角面の法線方向に基づいて(例えば法線方向の平均値を採用して)、その形状構成点Iの法線方向を求めることができる。あるいは、単に第3固有ベクトルeI3を、その形状構成点Iの法線方向とすることもできる。基本コンポーネント内の全ての形状構成点Iについて法線方向が求められると、法線方向を所定のレンジに分けてヒストグラムを作成する。このヒストグラムの最大レンジ(90度に近いレンジ)で計上される形状構成点Iの数が最も多ければ、その基本コンポーネントは全体的に概ね水平であると判断することができる。
【0084】
図14に示すように、電線等の接続物を計測した計測点に基づく接続物コンポーネントは柱状物体を構成するものではなく、したがって柱状物体を的確に抽出する場合、接続物コンポーネントは取り除くことが望ましい。基本コンポーネントの中から接続物コンポーネントを認識するには、以下の条件等に基づいて行う。接続物コンポーネントは線状であることから、形状分類が「柱状物体上の点」である基本コンポーネントを選択する。そして、その基本コンポーネントが略水平であるものを接続物コンポーネントとして認識する(S11b)。このとき、基本コンポーネントを構成する形状構成点Iの数が一定数以上とすることも条件に加えることができる。
【0085】
基本コンポーネントが略水平であるか否かの判定は、その基本コンポーネントを構成する形状構成点Iに基づいて行うことができる。すなわち、形状構成点Iの第1固有ベクトルeI1(主軸方向)が略水平(水平方向から閾値範囲内)であれば、その基本コンポーネントは全体的に概ね水平であると判断することができる。
【0086】
支柱コンポーネントは、柱状物体を構成する基幹の基本コンポーネントである。基本コンポーネントの中から支柱コンポーネントを認識するには、以下の条件等に基づいて行う。接続物コンポーネントは線状であることから、形状分類が「柱状物体上の点」である基本コンポーネントを選択する。そして、その基本コンポーネントが略鉛直(鉛直方向から閾値範囲内)であるものを支柱コンポーネントとして認識する(S11c)。このとき、基本コンポーネントを構成する形状構成点Iの数が一定数以上とすることも条件に加えることができる。
【0087】
基本コンポーネントが略鉛直にあるという条件に代えて、基本コンポーネントの断面形状が略円形であることを条件に支柱コンポーネントを認識することもできる。図15は、支柱コンポーネントの断面形状が略円形の一部を形成していることを示すモデル図である。基本コンポーネントの断面形状は、形状構成点Iの第1固有ベクトルeI1(主軸方向)に対して垂直に切った断面で考えられ、そこに投影される形状構成点Iが円形(あるいは円形の一部)に近い位置にあれば、支柱コンポーネントとして認識する。このとき、円形に近い位置にあるか否かは、RANSACのような手法を用いて判断することができる。
【0088】
また、図13に示すように、異なる支柱コンポーネントが複数生成された場合、最も下に位置する基本コンポーネントのみを支柱コンポーネントとして認識することもできる。この場合、上記の条件に加え、連結された複数の基本コンポーネントから地面コンポーネントを除き、複数の支柱コンポーネント(候補)のうち最小の標高値(3次元座標のうちのZ)を有することを支柱コンポーネントとして認識する条件とする。
【0089】
壁面を計測した計測点に基づく壁面コンポーネントは柱状物体を構成するものではなく、したがって柱状物体を的確に抽出する場合、壁面コンポーネントは取り除くことが望ましい。基本コンポーネントの中から壁面コンポーネントを認識するには、以下の条件等に基づいて行う。壁面コンポーネントは面状であることから、形状分類が「平面上の点」である基本コンポーネントを選択する。そして、その基本コンポーネントが略鉛直であるものを壁面コンポーネントとして認識する(S11d)。このとき、基本コンポーネントを構成する形状構成点Iの数が一定数以上とすること、あるいはその基本コンポーネントが所定の面積以上とすることも条件に加えることができる。
【0090】
基本コンポーネントが略鉛直であるか否かの判定は、地面コンポーネントで説明した手法を用い、ヒストグラムの最小レンジ(0度に近いレンジ)で計上される形状構成点Iの数が最も多ければ、その基本コンポーネントは全体的に概ね鉛直であると判断することができる。
【0091】
(柱状物体セグメントの作成)
支柱コンポーネントが認識されると、この支柱コンポーネントを基に柱状物体セグメントが作成される(S12)。支柱コンポーネント内にある形状構成点Iと隣接関係ある形状構成点Iは、他の基本コンポーネントを構成するものであってもエッジが生成されている。つまり、異なる基本コンポーネントをであっても連結されることがある。図13に示すように、支柱コンポーネントから次々に連結されていく基本コンポーネントをまとめて、一つの柱状物体セグメントが作成される。このとき、前出の地面コンポーネントと接続物コンポーネントは除いたうえで、柱状物体セグメントを作成することが望ましい。なお、他に連結される基本コンポーネントがない場合は、支柱コンポーネント単体で柱状物体セグメントが作成される。
【0092】
以上のように作成された柱状物体セグメントは、柱状物体として認識することができ、すなわち、大量の計測点群の中から的確に柱状物体を抽出することができる。
【0093】
(方法、プログラム、装置)
以上説明した手順を行うことで、本願発明である柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を実施することができる。具体的には、セグメントデータを得る「セグメンテーション工程」、細線化処理を行うことで立設物形状データを得る「細線化工程」、形状構成点に対して形状分類を与える「形状分類工程」、立設物の柱状判定を行う「柱状物体判定工程」を順に行うことで柱状物体抽出方法が実施できる。「柱状物体判定工程」は、隣接接続グラフを得る「隣接接続グラフ生成工程」と、基本コンポーネントを得る「基本コンポーネント形成工程」と、「支柱コンポーネント」など各種コンポーネントに分ける「基本コンポーネント分類工程」と、柱状物体セグメントを作成する「柱状物体セグメント作成工程」を含んでいる。また、セグメントデータを得る「セグメンテーション機能」、細線化処理を行うことで立設物形状データを得る「細線化機能」、形状構成点に対して固有値等を求める「主成分分析機能」、形状構成点に対して形状分類を与える「形状分類機能」、立設物の柱状判定を行う「柱状物体判定機能」を備え、さらに「柱状物体判定機能」は、隣接接続グラフを得る「隣接接続グラフ生成機能」と、基本コンポーネントを得る「基本コンポーネント形成工程機能」と、「支柱コンポーネント」など各種コンポーネントに分ける「基本コンポーネント分類機能」と、柱状物体セグメントを作成する「柱状物体セグメント作成機能」を含んでいる。これら機能をコンピュータに実行させるものとすることで柱状物体抽出プログラムを得ることができる。さらに、計測手段と計測点群を取得する「計測手段」、この計測点群やプログラム等を記憶するハードデスク等の記憶領域を備えた「記憶手段」、柱状物体抽出プログラムを実行させるコンピュータ等の「演算処理手段」を備えたものとすることで「柱状物体抽出装置」を得ることができる。
【0094】
4.第3の実施形態
ここまで第1の実施形態や第2の実施形態で、柱状物体であること認識する技術について説明した。一方、「柱状物体」は比較的広い概念であり、一般的には、柱状物体というよりも電柱、街灯、標識のような具体的な種別で認識されている。ここでは、柱状物体として認識されたものを、さらに具体的な種別に分類する手法について説明する。なお、ここでは柱状物体の種別として、電柱、街灯、標識の3種類を例にしている。
【0095】
図16は、柱状物体を種別分類する手順を示すフロー図である。柱状物体を種別分類するためには、それぞれ電柱、街灯、標識の特性を利用することになる。ここでは、柱状物体の構成から支柱(と認められるもの)を除いたものを「パーツ」としてとらえ、そのパーツの特性に着目して種別分類を行う。
【0096】
(支柱候補点の抽出)
第1の実施形態や第2の実施形態で与えられた形状構成点Iの形状分類と、形状構成点Iの第1固有ベクトルeI1(主方向)に基づいて、支柱候補点を抽出する(図16のS13)。記述のとおり、形状分類は特徴量SIに基づいて設定され、例えば「柱状物体上の点」、「平面上の点」、「その他物体上の点」に分類される。この形状分類が「柱状物体上の点」であって、第1固有ベクトルeI1(主方向)が略鉛直(鉛直方向から閾値範囲内)である形状構成点Iが、支柱候補点として抽出される。このとき、支柱候補点を所定平面に投影させると、所定半径の円形に近い位置にあるもののみを支柱候補点として残すこともできる。この場合は、RANSACのような手法を用いて判断することができる。なお、第2の実施形態においては、支柱コンポーネントを構成する形状構成点Iが、支柱候補点として抽出されることとしてもよい。
【0097】
次に、支柱候補点から近い形状構成点I、具体的には支柱候補点から所定の閾値(距離)以内にある形状構成点Iも抽出する。ここで抽出された形状構成点Iと、支柱候補点とを合わせて支柱構成点として確定する(S14)。
【0098】
次に、立設物形状データ(第1の実施形態)や柱状物体セグメント(第2の実施形態)を構成する形状構成点Iのうち、支柱構成点とされたものを除く。その結果、得られるのがパーツを構成する形状構成点Iである。これらパーツを構成する形状構成点Iは、エッジで連結されているもの(第2の実施形態の場合は基本コンポーネント(図13))であり、このエッジで連結された連続成分をパーツとして抽出する(S15)。
【0099】
パーツは、立設物形状データ(第1の実施形態)や柱状物体セグメント(第2の実施形態)から支柱を除いて得られるパーツである。一つの立設物形状データや柱状物体セグメント(以下、本実施形態ではこれらをまとめて「柱状物体セグメント等」という。)には、複数のパーツが存在することもあるし、一つだけの場合もある。また、パーツは一つの個別要素(第2の実施形態の場合は基本コンポーネント)から構成されることもあるし、複数の個別要素が連結して構成されることもある。このように種々ある構成を、あらかじめ設定した種別(パーツタイプ)に分けるのがパーツ分類である(S16)。図17は、個別要素の形状分類や、個別要素の組み合わせに基づいて分類されたパーツタイプの例を示すモデル図である。例えば、形状分類が「柱状物体上の点」である個別要素のみからなるパーツは「棒」というパーツタイプに分類され(A)、形状分類が「平面上の点」である個別要素のみからなるパーツは「面」というパーツタイプに分類され(B)、形状分類が「その他物体上の点」である個別要素のみからなるパーツは「立体」というパーツタイプに分類される(C)。また、形状分類が「柱状物体上の点」である個別要素と、形状分類が「平面上の点」である個別要素によって構成されるパーツは「棒+面」というパーツタイプに分類される(D)。ここでは、8種類のパーツタイプを設定している。すなわち、パーツタイプAが「棒」、パーツタイプBが「面」、パーツタイプCが「立体」、パーツタイプDが「棒+面」、パーツタイプEが「棒+立体」、パーツタイプFが「面+立体」、パーツタイプGが「棒+面+立体」、パーツタイプHが「その他」である。
【0100】
抽出されたパーツにそれぞれパーツタイプが付与されると、柱状物体セグメント等ごとに帰属度が算出される(S17)。帰属度とは、その柱状物体セグメント等が電柱、街灯、標識に帰属する度合いを示すものであり、電柱の帰属度、街灯の帰属度、標識の帰属度の3種類が算出され、最も大きな値を示す帰属度に従って種別を判定する(S18)。
【0101】
それぞれの帰属度は、柱状物体セグメント等の高さ、柱状物体セグメント等に含まれるパーツの数、及びパーツタイプに関する評価に基づいて算出され、具体的には次式によって求められる。
【0102】
上式左辺のfiは帰属度で、i=1のときに電柱の帰属度が、i=2のときに街灯の帰属度が、i=3のときに標識の帰属度が求められる。また、右辺にあるhsは柱状物体セグメント等の高さ、nsは柱状物体セグメント等に含まれるパーツの数、Tsはパーツタイプに関する評価であり、fHi(hs)は柱状物体セグメント等の高さによる関数、fNi(ns)はパーツ数による関数、fTi(Ts)はパーツタイプによる関数である。fHi(hs)、fNi(ns)、fTi(Ts)はそれぞれ次式で求められる。
【0103】
(6−1)式のhminは、図18にも示すように種別によって異なる値が採られ、例えば、電柱の場合hmin=6.5m、街灯の場合hmin=3.0m、標識の場合hmin=2.0mとすることができる。同様にhmaxも種別によって異なる値が採られ、例えば、電柱の場合hmax=15.0m、街灯の場合hmax=12.0m、標識の場合hmax=6.5mとすることができる。
【0104】
(6−2)式のパラメータaとbは、図18にも示すように種別によって異なる値が採られ、例えば、電柱の場合a=0.1,b=0、街灯の場合a=−0.2,b=1.0、標識の場合a=−0.3,b=0.9とすることができる。
【0105】
(6−3)式の「該当するパーツタイプの数」とは、種別ごとにあらかじめ定められたパーツタイプに該当するパーツ数である。例えば、電柱の場合は「パーツタイプC又はパーツタイプH」、街灯の場合は「パーツタイプA又はパーツタイプE」、標識の場合は「パーツタイプB、パーツタイプD、パーツタイプF、又はパーツタイプG」のように設定することができる。この場合、柱状物体セグメント等の中にパーツ数nsが8個で、パーツタイプAが1個、パーツタイプBが1個、パーツタイプCが2個、パーツタイプHが4個とすると、電柱のfT1(Ts)=6/8=0.75、街灯のfT2(Ts)=1/8=0.125、標識のfT3(Ts)=1/8=0.125となる。
【0106】
このように柱状物体セグメント等ごとに、電柱、街灯、標識ごとにfHi(hs)、fNi(ns)、fTi(Ts)が算出され、これらを加算することで電柱の帰属度、街灯の帰属度、標識の帰属度がそれぞれ求められる。そして、例えば電柱の帰属度が最も大きな値を示す場合は、その柱状物体セグメント等は「電柱」と評価され、街灯の帰属度が最も大きな値を示す場合は、その柱状物体セグメント等は「街灯」と評価され、標識の帰属度が最も大きな値を示す場合は、その柱状物体セグメント等は「標識」と評価される。
【0107】
(コンテクスト特徴量に基づく種別認識)
記述した帰属度による柱状物体の種別(電柱、街灯、標識)認識では、場合によっては誤った認識をすることも考えられる。ここでは、コンテクスト特徴量を用いてより的確に柱状物体の種別認識を行う手法について説明する。
【0108】
通常、電柱や街灯は、等間隔で配置される。また、電柱と街灯の位置関係も規則性が認められることがある。このような「配置」に着目し、標準的な配置モデルと、評価しようとする柱状物体セグメント等の周辺の配置を比較することで、より的確な種別認識を行う。図19は、コンテクスト特徴量に基づいて柱状物体の種別を分類する手順を示すフロー図である。記述のとおり、柱状物体セグメント等ごとに帰属度(電柱、街灯、標識の3種類の帰属度)が算出される(S17)。
【0109】
対象となる範囲(例えば、対象となる市街地)に対して平面状にグリッドを設定する(S19)。グリッドは任意の間隔で、縦軸と横軸が交差するように設定する。このとき縦軸と横軸の交差は直行(交差角度90度に)することもできるし、他の斜角を選んで交差させることもできる。
【0110】
グリッドが設定されると、グリッドで囲まれた多数の升目(メッシュ)が形成される。柱状物体セグメント等は平面座標を備えているので、その柱状物体セグメント等がどのメッシュ内に存在するか、あるいはどのメッシュに最も近いか、ということが認識できる。したがって、柱状物体セグメント等をメッシュに配置することが可能で、その柱状物体セグメント等の帰属度(電柱、街灯、標識の3種類の帰属度)をメッシュに配点することができる(S20)。
【0111】
次に、評価する範囲(エリア)を設定する(S21)。すなわち、評価しようとする柱状物体セグメント等の周辺範囲をどの程度まで広げるかを決定する。ここでは、既にメッシュが形成されているので、図20に示すように、メッシュの数(縦の数×横の数)を決めることでエリアを設定する。
【0112】
エリアが設定されると、標準的な配置である「標準分布マップ」を作成する(S22)。この標準分布マップは、設定されたエリアを対象に作成する。標準分布マップは、例えば、電柱の周辺にはどのような標識の帰属度が配点されているか、ということに基づいて作成するものであり、電柱の標準分布マップは電柱、街灯、標識の帰属度を配点した3種類のものが作成され、同様に、街灯の標準分布マップも3種類、標識の標準分布マップも3種類が作成される。なお、標準的な配置は、人によって判断してもよいし、帰属度の高いものの配置を集約して平均値をとるなど計算により求めてもよい。
【0113】
評価しようとする柱状物体セグメント等に着目し、これを中心にエリアを設定し、周辺にある電柱、街灯、標識それぞれの帰属度を配点した3種類のマップ(周辺分布マップ)を作成する(S23)。図21は、3種類の周辺分布マップを示すモデル図である。
【0114】
標準分布マップが作成され、周辺分布マップが作成されると、コンテクスト特徴量を算出する(S24)。図22は、コンテクスト特徴量の算出方法を示すモデル図である。この図に示すようにコンテクスト特徴量は、周辺分布マップと標準分布マップを対応させて算出する。
【0115】
まず、着目する柱状物体セグメント等が「電柱」であるとして、電柱の標準分布マップを用意する。このとき、周辺分布マップは電柱、街灯、標識の帰属度が配点された3種類あり、電柱の標準分布マップも電柱、街灯、標識の帰属度が配点された3種類のものが用意される。そして、それぞれマップに形成されたメッシュは、設定されたエリアに基づいて配置されているので、配置や数は同じである。電柱帰属度の周辺分布マップと、同じく電柱帰属度の標準分布マップを照らし合わせ、同じメッシュどうしの電柱帰属度を乗算する。次に、街灯帰属度の標準分布マップと周辺分布マップを照らし合わせて、同じメッシュどうしの電柱帰属度を乗算し、標識帰属度の標準分布マップと周辺分布マップを照らし合わせて、同じメッシュどうしの電柱帰属度を乗算する。最後に、全てのメッシュ(電柱、街灯、標識)の乗算値を総和すると電柱のコンテクスト特徴量が算出される。
【0116】
同様の手順で、今度は着目する柱状物体セグメント等が「街灯」であるとして、街灯の標準分布マップを用意し、街灯の帰属度が配点された周辺分布マップと照らし合わせて、街灯のコンテクスト特徴量を算出する。さらに同様の手順で、標識のコンテクスト特徴量を算出する。この結果、最も大きな値を示したコンテクスト特徴量に基づいて、柱状物体セグメント等の種別を判定することができる。例えば電柱のコンテクスト特徴量が最も大きな値を示す場合は、その柱状物体セグメント等は「電柱」と評価され、街灯のコンテクスト特徴量が最も大きな値を示す場合は、その柱状物体セグメント等は「街灯」と評価され、標識のコンテクスト特徴量が最も大きな値を示す場合は、その柱状物体セグメント等は「標識」と評価される。
【0117】
図23に、コンテクスト特徴量を算出した具体例を示した。この図では、横9メッシュ×縦1メッシュのエリアを設定しており、上から周辺分布マップ、標準分布マップ、コンテクスト特徴量の順で示している。周辺分布マップは、着目する柱状物体セグメント等(車線のメッシュ)の周辺に電柱の帰属度を配点しており、以下2行目は街灯の帰属度を、3行目は標識の帰属度を配点している。
【0118】
標準分布マップは、電柱、街灯、標識の順で示しており、それぞれ1行目が電柱の帰属度を配点したもの、2行目が街灯の帰属度を配点したもの、3行目が標識の帰属度を配点したものとしている。
【0119】
コンテクスト特徴量は、周辺分布マップと電柱の標準分布マップを照らし合わせて算出したコンテクスト特徴量、周辺分布マップと街灯の標準分布マップを照らし合わせて算出したコンテクスト特徴量、周辺分布マップと標識の標準分布マップを照らし合わせて算出したコンテクスト特徴量、の順で示しており、それぞれ1行目が電柱の帰属度をメッシュごとに対応して乗算した値、2行目が街灯の帰属度をメッシュごとに対応して乗算した値、3行目が標識の帰属度をメッシュごとに対応して乗算した値である。この結果、電柱のコンテクスト特徴量(3.57)が最も大きな値となるので、当該柱状物体セグメント等は、「電柱」として評価することができる。
【0120】
(方法、プログラム、装置)
以上説明した手順を行うことで、本願発明である柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を実施することができる。
【産業上の利用可能性】
【0121】
本願発明の柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置は、立設物のうち柱状物体を抽出する発明であるが、この発明を応用することで看板や壁面などのような板状物体を抽出することも、柱状物体や板状物体以外に分類されるものを抽出することもできる。また、ポールに看板を取り付けたもののように、柱状物体と板状物体を組み合わせたものを抽出することも可能である。これによって、様々な立設物管理に利用することができる。
【符号の説明】
【0122】
i 任意計測点
j 近傍計測点
q 他の近傍計測点
r (限界距離)半径
I* 近傍形状構成点集合
PI 形状構成点の座標値
PIO I*の重心座標値
PJ 近傍形状構成点の座標値
θ 挟角
Ss 構成点集合
Cs 柱状点集合
Ds 鉛直点集合
【技術分野】
【0001】
本願発明は、市街地などを計測した計測点群から、街灯、電柱、標識といった柱状の物体を抽出する柱状物体抽出方法と、柱状の物体を自動抽出するための柱状物体抽出プログラム及び柱状物体抽出装置に関するものである。
【背景技術】
【0002】
近年、計測技術の進歩とともに地形情報(空間情報)の需要が高まっている。たとえば、道路上あるいは沿道に設置された施設をより高度に管理することを目的として、その形状や設置位置といった施設の空間情報を要望する管理者が増加している。特に、街灯や電柱、標識などのようにその外形が柱状である地物(以下、「柱状物体」という。)は、同形のものが多数設置されていることから通常は位置情報とともに管理されているが、設置位置だけでなく、施設高、付着物(看板や信号など)、その他周辺地物との位置関係などの空間情報も求められているところである。
【0003】
柱状物体の空間情報を取得する場合、これまでは実際に測量を行うかあるいは計画図等から抽出する方法が採られていた。つまり、あらかじめその地物が柱状物体であることを人が判断したうえで、測量等を行っていたわけである。したがって、多数の柱状物体に対して行うこれらの作業は、著しく時間や労力を要するばかりでなく、抽出漏れや誤りが生ずるなどその成果精度は必ずしも高いものとはならなかった。
【0004】
一方で、前述のとおり近年の計測技術は著しく進歩しており、従来に比べると高精度でしかも多量の計測データを同時取得できるようになってきた。その代表的な計測手段がレーザスキャナーによる計測で、計測対象物に対して毎秒数万発で照射したレーザ反射を利用して計測する技術であり、大量の計測データの同時取得が可能である。通常は、移動体にレーザスキャナーを搭載して移動しながら計測しており、これまでは航空機に搭載して空中から眼下の地形を計測するのが主流であった。昨今では、自動車に搭載し、道路上を移動しながら計測するモバイルマッピングシステム(Mobile Mapping System:MMS)という手法も多用されている。
【0005】
モバイルマッピングシステムによれば、路上あるいは沿道にあるあらゆる地物の計測データが取得される。当然ながら柱状物体を計測した結果も、モバイルマッピングシステムで計測された計測データ中に含まれており、この計測データを利用すれば柱状物体の空間情報(設置位置や形状など)を得ることができる。しかしながら、大量の計測データの中から柱状物体に該当するものを、目視など人の判断に従って抽出するとなると、従来にも増して時間や労力を必要とし、また数多くの抽出漏れや誤りが生ずることが予想される。
【0006】
大量の計測データの中から柱状物体の計測データを自動的に抽出できれば、人による作業は著しく軽減され人為的なミスも排除できることから、このような技術の確立が前出の管理者等から切望されている。
【0007】
そこで特許文献1では、レーザスキャナー計測で得られた計測点データをコンピュータで処理することで、柱状物体(本文献では「円筒形物」としている。)を自動検出する技術を提案している。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2010−286267
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1は、例えば電柱のように鉛直方向に同一断面が連続する物を計測した場合、その計測点(3次元座標)を水平面に射影すると、一定の形状(つまり電柱の断面形状)に計測点が集中するという特徴を利用した技術である。具体的には、水平面に射影した計測点に対して、あらかじめ用意しておいたテンプレートパターンと照合し、その照合結果を判断することで円筒形物を検出するものである。
【0010】
しかしながら特許文献1の手法では、検出したい円筒形物のテンプレートパターンを作成する手間が必要であり、しかもそのテンプレートパターンの良否によって検出精度が異なるという不安定さがある。また、鉛直方向に断面が変化する物は検出し難く、たとえ円柱形状であっても傾斜している物はやはり検出し難い、という点も指摘できる。さらに、検出したい円筒形物の形状を認識しておくことが必要であり、どのような柱状物体が存在しているか事前に把握できていない場合には、特許文献1の手法を採用することができない。
【0011】
本願発明の課題は、従来技術が抱える問題、すなわち、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体(あるいはその形状)を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【課題を解決するための手段】
【0012】
本願発明の柱状物体抽出方法は、地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、立設物のうちその形状が柱状である柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、それぞれのセグメントデータに対して立設物の形状特徴を明確にする細線化処理を行うことで立設物形状データを得る細線化工程と、立設物形状データを構成する形状構成点に対してそれぞれ主成分分析を行って固有値及び固有ベクトルを求めるとともに固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、形状構成点の特徴量に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。ここで、セグメンテーション工程は、任意計測点とこの点に近い近傍計測点との間でエッジを生成し、その結果得られる一つの連続成分を一つのセグメントデータとして得るものであり、細線化工程における細線化処理は、任意計測点の位置を移動させるものであって、任意計測点、近傍計測点、及び任意計測点における近傍計測点2点との挟角から求められる細線化強度に基づいて、移動後の任意計測点位置を求めるものである。
【0013】
本願発明の柱状物体抽出方法は、セグメンテーション工程を、任意計測点から近い順に所定数k個の近傍計測点を選出し、この近傍計測点と任意計測点との間でエッジを生成することでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとして得る工程とすることもできる。
【0014】
本願発明の柱状物体抽出方法は、主成分分析によって得られる固有値を、値の大きなものから順に、第一固有値、第二固有値、第三固有値とし、第一固有値に対応する固有ベクトルを第一固有ベクトル、第二固有値に対応するものを第二固有ベクトル、第三固有値に対応するものを第三固有ベクトルとした方法とすることもできる。この場合、特徴量は、第一固有値と第二固有値に基づいて算出される第一特徴量、第二固有値と第三固有値に基づいて算出される第二特徴量、第三固有値に基づいて算出される第三特徴量で構成され、形状分類は「柱状物体上の点」を含む2以上の分類で構成される。また、特徴量のうち第一特徴量が最大値を示す形状構成点には形状分類として「柱状物体上の点」が付与される。
【0015】
本願発明の柱状物体抽出方法は、立設物形状データを構成する形状構成点のうち「柱状物体上の点」に分類された形状構成点が占める割合、又は/及び「柱状物体上の点」に分類された形状構成点のうち第一固有ベクトルが鉛直又は鉛直に近い向きである形状構成点が占める割合に基づいて、立設物形状データの柱状物体度を求め、この柱状物体度を評価することで立設物の柱状判定を行う方法とすることもできる。
【0016】
本願発明の柱状物体抽出方法は、柱状物体判定工程が、隣接接続グラフ生成工程と、基本コンポーネント形成工程と、基本コンポーネント分類工程と、柱状物体セグメント作成工程を含んだ方法とすることもできる。この場合、隣接接続グラフ生成工程は、各形状構成点の固有ベクトルに基づいて、各形状構成点と隣接関係にある隣接点を求めるとともに、隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの隣接接続グラフとして得るものである。また、基本コンポーネント形成工程は、隣接接続グラフを構成する各形状構成点に対して、各形状構成点と同一の形状分類が付与された隣接点を求めるとともに、隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの基本コンポーネントとして得るものである。基本コンポーネント分類工程では、基本コンポーネントに対して形状分類に応じたコンポーンネントを分類するものであって、形状分類が「柱状物体上の点」である基本コンポーネントは「支柱コンポーネント」に分類する。柱状物体セグメント作成工程は、支柱コンポーネントを含む隣接接続グラフを抽出するとともに、隣接接続グラフに含まれる1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成するものである。このときの隣接点は、形状構成点から固有ベクトル方向に向けて拡張される空間範囲内において、形状構成点から最も近い形状構成点が選ばれる。
【0017】
本願発明の柱状物体抽出方法は、一つの隣接接続グラフ内に、その形状分類が「柱状物体上の点」である基本コンポーネントが2以上含まれる場合、形状分類が「柱状物体上の点」である基本コンポーネントのうち最小の標高値を具備するものを、「支柱コンポーネント」と分類する方法とすることもできる。
【0018】
本願発明の柱状物体抽出方法は、「地面コンポーネント」を除いたうえで、1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成する方法とすることもできる。この場合、第二特徴量が最大値を示す形状構成点に形状分類として「平面上の点」を付与し、形状分類が「平面上の点」である基本コンポーネントは「平面コンポーネント」に分類する。そして、平面コンポーネントを構成する形状構成点によって形成される面の法線方向に基づいて、略水平な平面コンポーネントを「地面コンポーネント」として抽出する。
【0019】
本願発明の柱状物体抽出方法は、「接続物コンポーネント」を除いたうえで、1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成する方法とすることもできる。この場合、形状分類が「柱状物体上の点」の基本コンポーネントであって、基本コンポーネントを構成する形状構成点の第一固有ベクトルが略水平な基本コンポーネントを「接続物コンポーネント」として抽出する。
【0020】
本願発明の柱状物体抽出方法は、帰属度に基づいて、柱状物体をさらに種別分けすることもできる。この場合、柱状物体セグメントを構成する基本コンポーネントのうち、支柱コンポーネント以外の基本コンポーネントであって、相互に連結された基本コンポーネントの組み合わせをパーツとして抽出し、このパーツを形状分類に基づくパーツタイプに分類し、柱状物体セグメントの高さ、柱状物体セグメントに含まれるパーツの数、及びパーツタイプに関する評価に基づいて、柱状物体セグメントの帰属度を求める。
【0021】
本願発明の柱状物体抽出方法は、支柱構成点を抽出したうえで、帰属度に基づいて柱状物体をさらに種別分けすることもできる。この場合、支柱候補点から所定距離内にある形状構成点と、この支柱候補点をまとめて支柱構成点とする。立設物形状データのうち、支柱構成点以外の形状構成点で構成される連続成分をパーツとして抽出し、このパーツを形状分類に基づくパーツタイプに分類し、立設物形状データの高さ、立設物形状データに含まれるパーツの数、及びパーツタイプに関する評価に基づいて、立設物形状データの帰属度を求める。
【0022】
本願発明の柱状物体抽出方法は、コンテクスト特徴量に基づいて柱状物体をさらに種別分けすることもできる。この場合、所定のグリッドによって複数のメッシュを構成するとともに、帰属度を最も近いメッシュに配点し、所定数のメッシュで構成されるエリアを設定し、このエリアに基づいて柱状物体の種類ごとに標準分布マップを作成する。さらに、エリアに基づき各柱状物体セグメント又は各立設物形状データに対して、周辺分布マップを作成し、標準分布マップ及び周辺分布マップに基づいて、当該柱状物体セグメント又は立設物形状データに対してコンテクスト特徴量を算出する。
【0023】
本願発明の柱状物体抽出プログラムは、地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、立設物のうちその形状が柱状である柱状物体を抽出する機能をコンピュータに実行させる柱状物体抽出プログラムであり、計測点群からそれぞれ独立した領域ごとにセグメントデータを作成するセグメンテーション機能と、それぞれのセグメントデータに対して立設物の形状特徴を明確にする細線化処理を行って立設物形状データを作成する細線化機能と、それぞれの形状構成点に対して主成分分析のための演算処理を行って固有値及び固有ベクトルを求める主成分分析機能と、さらにそれぞれの形状構成点に対して固有値を基に算出される特徴量に応じた形状分類を付与する形状分類機能と、形状構成点の特徴量に基づいて立設物の柱状判定処理を行う柱状物体判定機能を備えたものである。ここで、セグメンテーション機能は、任意計測点とこの点に近い近傍計測点との間でエッジを発生させ、その結果得られる一つの連続成分を一つのセグメントデータとするものであり、細線化機能で行われる細線化処理は、任意計測点の位置を移動させるものであって、任意計測点における近傍計測点2点との挟角を算出し、この挟角と任意計測点と近傍計測点とに基づいて、移動後の任意計測点位置を算出するものである。
【0024】
本願発明の柱状物体抽出プログラムは セグメンテーション機能を、任意計測点から近い順に所定数k個の近傍計測点を選出し、この近傍計測点と任意計測点との間でエッジを発生させることでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとする機能とすることもできる。
【0025】
本願発明の柱状物体抽出プログラムは 主成分分析機能によって求められる固有値を、値の大きなものから順に、第一固有値、第二固有値、第三固有値とし、同様に第一固有値に対応するものを第一固有ベクトル、第二固有値に対応するものを第二固有ベクトル、第三固有値に対応するものを第三固有ベクトルとしたプログラムとすることもできる。この場合、特徴量は、第一固有値と第二固有値に基づいて算出される第一特徴量と、第二固有値と第三固有値に基づいて算出される第二特徴量と、第三固有値に基づいて算出される第三特徴量で構成され、形状分類は、「柱状物体上の点」を含む2以上の分類で構成される。また、特徴量のうち第一特徴量が最大値を示す形状構成点には形状分類として「柱状物体上の点」を付与する。
【0026】
本願発明の柱状物体抽出プログラムは、立設物形状データを構成する形状構成点のうち「柱状物体上の点」に分類された形状構成点が占める割合、又は/及び「柱状物体上の点」に分類された形状構成点のうち固有ベクトルが鉛直又は鉛直に近い向きである形状構成点が占める割合に基づいて、立設物形状データの柱状物体度を算出し、この柱状物体度を評価することで立設物の柱状判定を行うものとすることもできる。
【0027】
本願発明の柱状物体抽出プログラムは、柱状物体判定機能が、隣接接続グラフ生成機能と、基本コンポーネント形成機能と、基本コンポーネント分類機能と、柱状物体セグメント作成機能を含んだものとすることもできる。この場合、隣接接続グラフ生成機能は、各形状構成点の固有ベクトルに基づいて、各形状構成点と隣接関係にある隣接点を選出するとともに、隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの隣接接続グラフとする。また、基本コンポーネント形成機能は、隣接接続グラフを構成する各形状構成点に対して、各形状構成点と同一の形状分類が付与された隣接点を選出するとともに、隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの基本コンポーネントとする。基本コンポーネント分類機能は、基本コンポーネントに対して形状分類に応じたコンポーンネント分類を付与するものであって、形状分類が「柱状物体上の点」である基本コンポーネントにはコンポーンネント分類として「支柱コンポーネント」を付与する。柱状物体セグメント作成機能は、支柱コンポーネントを含む隣接接続グラフを抽出するとともに、隣接接続グラフに含まれる1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成する。このときの隣接点は、形状構成点から固有ベクトル方向に向けて拡張される空間範囲内において、形状構成点から最も近い形状構成点が選ばれる。
【0028】
本願発明の柱状物体抽出プログラムは、一つの隣接接続グラフ内に、その形状分類が「柱状物体上の点」である基本コンポーネントが2以上含まれる場合、形状分類が「柱状物体上の点」である基本コンポーネントのうち最小の標高値を具備するものに、コンポーンネント分類として「支柱コンポーネント」を付与するものとすることもできる。
【0029】
本願発明の柱状物体抽出プログラムは、「地面コンポーネント」を除いたうえで、1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成するものとすることもできる。この場合、第二特徴量が最大値を示す形状構成点に形状分類として「平面上の点」を付与し、形状分類が「平面上の点」である基本コンポーネントには、コンポーンネント分類として「平面コンポーネント」を付与する。そして、平面コンポーネントを構成する形状構成点によって形成される面の法線方向に基づいて、略水平な平面コンポーネントを「地面コンポーネント」として抽出する。
【0030】
本願発明の柱状物体抽出プログラムは、「接続物コンポーネント」を除いたうえで、1又は2以上の基本コンポーネントを結合して柱状物体セグメントを作成するものとすることもできる。この場合、形状分類が「柱状物体上の点」の基本コンポーネントであって、基本コンポーネントを構成する形状構成点の第一固有ベクトルが略水平な基本コンポーネントを「接続物コンポーネント」として抽出する。
【0031】
本願発明の柱状物体抽出プログラムは、帰属度に基づいて柱状物体さらに種別分けするする柱状物体種別認識機能を備えたものとすることもできる。この場合、柱状物体セグメントを構成する基本コンポーネントのうち、支柱コンポーネント以外の基本コンポーネントであって、相互に連結された基本コンポーネントの組み合わせをパーツとして抽出するパーツ抽出機能と、パーツを形状分類に基づくパーツタイプに分類するパーツタイプ分類機能と、柱状物体セグメントの高さ、柱状物体セグメントに含まれるパーツの数、及びパーツタイプに関する評価に基づいて、柱状物体セグメントの帰属度を算出する帰属度算出機能を併せて備える。
【0032】
本願発明の柱状物体抽出プログラムは、支柱構成点抽出機能を備えるとともに、帰属度に基づいて柱状物体さらに種別分けするする柱状物体種別認識機能を備えたものとすることもできる。この場合、支柱構成点抽出機能は、立設物形状データのうち、「柱状物体上の点」に分類された形状構成点であって、第一固有ベクトルが略鉛直方向である形状構成点を支柱候補点とし、支柱候補点から所定距離内にある形状構成点と、支柱候補点をまとめて支柱構成点とするものである。また、立設物形状データのうち、支柱構成点以外の形状構成点で構成される連続成分をパーツとして抽出するパーツ抽出機能と、パーツを形状分類に基づくパーツタイプに分類するパーツタイプ分類機能と、立設物形状データの高さ、立設物形状データに含まれるパーツの数、及びパーツタイプに関する評価に基づいて、立設物形状データの帰属度を算出する帰属度算出機能を併せて備える。
【0033】
本願発明の柱状物体抽出プログラムは、コンテクスト特徴量に基づいて柱状物体の種類を選別する柱状物体種別認識機能を備えたものとすることもできる。この場合、所定のグリッドによって複数のメッシュを構成するとともに、帰属度を最も近いメッシュに配点する帰属度配点機能と、所定数のメッシュで構成されるエリアを設定するエリア設定機能と、エリアに基づいて、柱状物体の種類ごとに標準分布マップを作成する標準分布マップ作製機能と、エリアに基づき各柱状物体セグメント又は各立設物形状データに対して、周辺分布マップを作成する周辺分布マップ作製機能と、さらに、標準分布マップ及び周辺分布マップに基づいて、当該柱状物体セグメント又は立設物形状データに対して、コンテクスト特徴量を算出するコンテクスト特徴量算出機能を併せて備える。
【0034】
本願発明の柱状物体抽出装置は、地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、立設物のうちその形状が柱状である柱状物体を抽出する柱状物体抽出装置であり、所定空間を計測して計測点群を取得する計測手段と、計測手段によって取得された計測点群を記憶する記憶手段と、計測点群を基に立設物のうち柱状物体を抽出する演算処理手段を備えたものである。さらに演算処理手段は、セグメンテーション機能と、細線化機能と、主成分分析機能と、形状分類機能と、柱状物体判定機能を備えている。ここで、セグメンテーション機能は、計測点群から、それぞれ独立した領域ごとにセグメントデータを作成するものであって、任意計測点から近い順に所定数k個の近傍計測点を選出し、この近傍計測点と任意計測点との間でエッジを発生させることでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとするものであり、細線化機能は、それぞれのセグメントデータに対して、立設物の形状特徴を明確にする細線化処理を行って立設物形状データを作成するものであり、主成分分析機能は、それぞれの形状構成点に対して、主成分分析のための演算処理を行って固有値及び固有ベクトルを求めるものであり、形状分類機能は、それぞれの形状構成点に対して、固有値を基に算出される特徴量に応じた形状分類を付与するものであり、柱状物体判定機能は、形状構成点の特徴量に基づいて立設物の柱状判定処理を行うものであり、細線化機能で行われる細線化処理は、任意計測点の位置を移動させるものであって、任意計測点における近傍計測点2点との挟角を算出し、この挟角と任意計測点と近傍計測点とに基づいて、移動後の任意計測点位置を算出するものである。
【発明の効果】
【0035】
本願発明の柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置には、次のような効果がある。
(1)大量の計測点群の中から、目視など人の判断を介することなく、柱状物体を自動抽出するので、人為的なミスが排除されて漏れなく抽出できるうえ、極めて短時間で抽出結果を得ることができる。
(2)任意計測点における近傍計測点2点との挟角から求められる細線化強度に基づいて細線化処理を行うので、柱状物体の端点や枝分かれ点は保持した(点移動が少ない)まま細線化され、この結果、形状を正確に表現しつつ形状特徴を明確にすることができる。したがって、正確に柱状物体を抽出することができる。
(3)セグメンテーションを行う際、任意計測点から近い順にk個の近傍計測点を選出してk近傍接続グラフを作成することとすれば、セグメンテーションの処理時間が短縮され、ひいては柱状物体を抽出する処理のさらなる高速化を図ることができる。
(4)主成分分析や、固有値を基に算出される特徴量に応じた形状分類といった概念を用いることによって、様々な太さや傾きの柱状物体でも抽出することができる。
(5)柱状物体からパーツを抽出し、これをパーツ分類することで、柱状物体をさらに電柱、街灯、標識など詳細な分類に分けることができる。
【図面の簡単な説明】
【0036】
【図1】(a)は市街地全体の地形を表す全体モデル図、(b)は抽出された柱状物体のみを表す柱状物体モデル図。
【図2】本願発明の手順およびそのながれを示すフロー図。
【図3】第1の実施形態の手順およびそのながれを示すフロー図。
【図4】任意計測点の近傍計測点を検出する考え方を示す説明図。
【図5】任意計測点と近傍計測点とからなる挟角を説明するモデル図。
【図6】分散共分散行列作成するために用いられる要素を説明するためのモデル図。
【図7】近傍形状構成点集合の点分布状態と第1固有ベクトルを示すモデル図。
【図8】立設物が鉛直柱と水平柱と平板で構成される案内標識である場合に、形状構成点に対して形状分類を付与したモデル図。
【図9】立設物が鉛直柱と水平柱と平板で構成される案内標識である場合に、形状構成点に対して形状分類を付与し、さらに第1固有ベクトルを加味して分類したモデル図。
【図10】第2の実施形態の手順およびそのながれを示すフロー図。
【図11】形状構成点における隣接点を探索する状況を具体的に説明したモデル図。
【図12】(a)は形状分類が「柱状物体上の点」の場合に選択される固有ベクトルを示すモデル図、(b)は形状分類が「平面上の点」の場合に選択される固有ベクトルを示すモデル図、(c)は形状分類が「その他物体上の点」の場合に選択される固有ベクトルを示すモデル図。
【図13】異なる基本コンポーネントが複数生成された状態を示すモデル図。
【図14】接続物コンポーネントを示すモデル図。
【図15】支柱コンポーネントの断面形状が略円形の一部を形成していることを示すモデル図。
【図16】柱状物体を種別分類する手順を示すフロー図。
【図17】基本コンポーネントの形状分類や、組み合わせに基づいて分類されたパーツタイプの例を示すモデ図。
【図18】電柱、街灯、標識ごとに帰属度の算出方法を示す説明図。
【図19】コンテクスト特徴量に基づいて柱状物体の種別を分類する手順を示すフロー図。
【図20】着目する柱状物体セグメントを中心に、設定したエリア範囲で形成されるメッシュを示すモデル図。
【図21】3種類の周辺分布マップを示すモデル図。
【図22】コンテクスト特徴量の算出方法を示すモデル図。
【図23】コンテクスト特徴量を算出した具体例を示すモデル図。
【発明を実施するための形態】
【0037】
本願発明の柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置の実施形態の例を図に基づいて説明する。
【0038】
1.全体概要
図1は、市街地を計測した全体地形から柱状物体を抽出した状態を示すモデル図で、(a)は市街地全体の地形を表す全体モデル図であり、(b)は抽出された柱状物体のみを表す柱状物体モデル図である。なお、図1(a)の全体モデル図は、市街地の所定範囲を計測した計測点の集合(以下、「計測点群」という。)を鳥瞰図として示した図である。このように、本願発明は地形全体の地物から柱状物体を抽出するものである。
【0039】
計測点群を構成する計測点は、例えばレーザスキャナーを搭載した自動車で市街地の所定範囲を移動しながら計測して得ることができる。この計測点は、平面座標と高さからなる3次元座標(X,Y,Z)である。もちろんこの計測点を、緯度、経度、標高で表すこともできる。また、計測点を得る手法として、車載型レーザスキャナーを用いた手法(いわゆるMMS)に限らず、航空機にレーザスキャナーを搭載して計測する手法を用いることもできるし、レーザスキャナーを用いることなくTS(トータルステーション)等を利用した従来計測手法を採用することもできる。また、必ずしも本願発明のために計測する必要はなく、既存の計測点を利用することができるのは言うまでもない。
【0040】
レーザスキャナーを用いると、通常、1回の計測で多数の計測点を得る。記述のとおり、この多数の計測点の集合が「計測点群」である。すなわち図1(a)の全体モデル図は、市街地全体の計測点群を鳥瞰図として表示した図といえる。なお、ここで対象としている空間は市街地の所定範囲であるが、本願発明を実施する上で、複数の立設物を含む空間であれば対象空間が市街地である必要はない。
【0041】
図2は、本願発明の概要を示すフロー図である。この図に沿って、各手順(ステップ)とその流れについて説明する。まず市街地の計測結果である計測点群を用意する。この計測点群の中には、ある程度独立した計測点の「かたまり」が含まれている。この「かたまり」は、地面上に立設された(地面上に立ち上がった)地物(以下、「立設物」という。)と考えられ、この立設物を含む所定の領域をセグメントとして区分するのがセグメンテーションである(S02)。なお便宜上、所定領域ごとに区分された計測点の集合を「セグメントデータ」という。
【0042】
次に、各セグメントデータに対して細線化処理を行う(S03)。これは、立設物の形状(外形)の特徴を明確にするもので、例えば電柱を計測した場合、電柱以外の計測点や誤差のある計測点が含まれるがこれを調整することによって本来の電柱の形状に近づける処理である。ここでは、セグメントデータを細線化処理して得られた結果を「立設物形状データ」と呼び、さらに細線化処理によって計測点を調整したもの(つまり立設物形状データを構成する各点)を「形状構成点」と呼ぶこととする。
【0043】
つづいて各形状構成点に対して主成分分析を行い、その立設物形状データに対応する立設物の向き(軸方向)を求め、さらに主成分分析の結果得られる固有値に基づいて各形状構成点の特徴量を算出する(S04)。この特徴量は、立設物の形状特徴を表す値であり、特徴量に応じてあらかじめ定めておいた形状分類を付与することができる(S05)。
【0044】
各形状構成点に対して形状分類が付与されると、この形状分類を利用して柱状物体を認識することが可能となり、結果的に、市街地全体の地物から柱状物体のみを抽出することが可能となる。
【0045】
形状分類を利用して柱状物体を認識する手法は、大別すると3種類に分けられ、ここではそれぞれ「第1の実施形態」、「第2の実施形態」、「第3の実施形態」として説明することとする。以下、各実施形態について要素ごとに詳述する。
【0046】
2.第1の実施形態
本願発明の第1の実施形態の例を、図に基づいて説明する。図3は、第1の実施形態の概要を示すフロー図である。以下、このフロー図に沿って各手順(ステップ)を説明する。
【0047】
(地面点の除去)
計測点群が、地面を計測した計測点(以下、「地面点」という。)を含む場合、この地面点を計測点群から取り除く(S01)。これは、後に説明するセグメンテーションを行う際に、独立した(つまり他とは連続性のない)計測点のかたまりを必要とするからである。したがって、計測点群に地面点が含まれない場合は、ここでの処理を実施する必要はない。
【0048】
計測点群から地面点を除く処理は、従来から用いられている手法によることが可能である。一例として、リージョングローイング(領域拡張)を挙げることができる。これは、任意の地面点を指定すると、その点から所定勾配(鉛直勾配)にある点を地面点として選出していくもので、指定した地面点から平面的に広げていって「地面」を特定する手法である。なお、計測点群から地面点を除去して得られる計測点の集合は、立設物を計測した計測点の集合と考えることができるので、これを特に「立設物計測点群」ということとする。
【0049】
(セグメンテーション)
セグメンテーションは、無秩序に配置された立設物計測点群に対して、立設物ごとに分離(セグメント化)する処理である(S02)。これは、一つの立設物を計測した複数の計測点は、それぞれ近い位置にあるという考えに基づくものであり、任意の計測点(任意計測点i)から近傍にある計測点(近傍計測点j)を検出し、これを次々に派生させていくことでセグメントを形成していくものである。この結果、得られるものがセグメントデータであり、基本的には対象空間内に含まれる立設物の数だけセグメントデータが得られる。
【0050】
セグメンテーションについてさらに詳しく説明する。図4は、任意計測点iの近傍計測点jを検出する考え方を示す説明図である。なお紙面の都合上、図4は2次元に見えるが、あくまで3次元の概念を示すものである。近傍計測点jの検出は、任意計測点iから所定距離内にあるすべての点とすることもできるが、以降の処理速度を考えると、近傍計測点jは近傍数k個以内にとどめるとよい。図4では、近傍数kを8個としており、近傍計測点j1〜j8を検出している。この場合、近傍数k個の近傍計測点jは任意計測点iから近い順に選ばれる。もちろん近傍数kは、適宜設計して定めることができる。
【0051】
また、近傍計測点jの選出条件として限界距離を設けることもできる。すなわち、図4に示すように、任意計測点iを中心に半径rの球を描き、この範囲内にある計測点のうち近い順に近傍数k(図では8個)分だけ近傍計測点jを検出する。したがって、限界距離の範囲内(半径rの球の範囲内)にある計測点が少ない場合は、近傍数k未満の近傍計測点jが検出されることとなる。
【0052】
任意計測点iに対する近傍計測点jを検出する際、すべての計測点を対象に条件照合することもできるが、ここでの検出処理時間を短縮するため、従来から用いられているkd木と呼ばれる手法を採用することもできる。
【0053】
任意計測点iにおける近傍計測点jが検出されると、当該任意計測点iとすべての近傍計測点jとを関連付ける。具体的には、任意計測点iと近傍計測点jでエッジ(リンク)を生成させる。図4では、(i,j1)〜(i,j8)の8個のエッジが生成されることとなる。
【0054】
一つの任意計測点iについてエッジ生成処理まで終わると、他の計測点を任意計測点として同様の処理を行っていく。これを繰り返し行うと、近傍にある計測点同士が集合し、これを一つの連続成分として得ることができる。すなわちここで得られた一つの連続成分が、一つの立設物に対応するセグメントデータである。また、このようにして立設物計測点群から複数のセグメントデータが得られた結果が接続グラフと呼ばれるものであり、特に近傍数kの近傍計測点jを検出して得られた結果が「k近傍接続グラフ」である。
【0055】
(細線化処理)
細線化処理はスムージングとも呼ばれるもので、立設物の形状の特徴を明確化するものである(S03)。セグメントデータを構成する計測点の中には、立設物以外を計測した計測点や、誤差のある計測点が含まれる。このような計測点を調整することで本来の電柱の形状に近づける処理が細線化処理であり、セグメントデータを構成する計測点を徐々に移動させて調整するものである。
【0056】
細線化処理はこれまでも行われてきた手法であるが、本願発明は柱状物体を抽出するという点に着目しており、細線化強度(スムージング強度)という概念を取り入れたことが一つの特徴である。具体的には、以下の数式に従って計測点を徐々に移動させていく処理である。
【数1】
【0057】
上記数式は、任意の計測点である任意計測点iをi’に調整(移動)させるものであり、piは細線化処理前(移動前)の任意計測点iの座標、pjは任意計測点iの近傍計測点jの座標、p’iは細線化処理後(移動後)の座標である。また、i* は任意計測点iの近傍計測点jの集合(以下、「近傍点集合」という。)、qは任意計測点iの近傍計測点であってjとは異なる点、Vi
は近傍計測点の組み合わせ(j,q)の点対集合である。
【0058】
上記数式で示されるように、細線化処理後のp’iは、任意計測点iの座標、近傍計測点jの座標、細線化強度λ、及び重みωij
に基づいて(これらを変数として)求められる。また、細線化強度λは、点対集合Viの点対数((j,q)の組み合わせ数)である|Vi|、任意計測点iを中心とした近傍計測点jと近傍計測点qからなる挟角であるangle(j,i,q)に基づいて求められる。なお重みωij
は、piとpj点との距離である||pj−pi||の逆数に基づいて求められる正値であり、遠い位置にある近傍計測点の影響を抑制している。
【0059】
図5は、任意計測点と近傍計測点とからなる挟角θ(つまりangle(j,i,q))を説明するモデル図である。この図に示すように、立設物の端部に位置する端点に近いほど挟角θが小さな値をとることがわかる。言い換えれば、細線化強度λが小さな値を取ることであり、この結果、任意計測点piの影響を強く残し、近傍計測点pjの影響が抑制される。したがって、立設物を構成する端点や枝分かれ点は、細線化処理によってあまり座標移動することがなく、すなわち端点や枝分かれ構造が保持されたまま細線化処理されることとなる。
【0060】
基本的に細線化処理は、セグメントデータを構成するすべての計測点に対して行われ、そしてすべてのセグメントデータに対して行われる。また、図3のフローに示すように、すべてのセグメントデータ(図ではm個のセグメントデータ)に対する細線化処理を1回とし、これを複数回(図ではn回)繰り返すと、立設物の形状特徴をより明確化できるので好適である。細線化処理の繰り返し回数nは、適宜設計することができる。
【0061】
以上のように、計測点を細線化処理することで形状構成点I(p’i)が得られ、すなわちセグメントデータを細線化処理することで立設物形状データ(形状構成点Iの集合)が得られる。
【0062】
(形状分類の付与)
細線化処理で得られた形状構成点Iは、立設物の形状を構成するものであり、局所的な点分布状態によりそれぞれこの形状に与える影響度が相違する。この局所的な点分布状態は、次式により形状構成点Iの分散共分散行列MIを作成することで、定量的に評価することができる(S04)。
【数2】
【0063】
上記数式で、PJは形状構成点Iの近傍(セグメンテーションで説明した近傍計測点の選出方法と同様に選出)である近傍形状構成点Jの座標値、I*は形状構成点Iの近傍形状構成点Jの集合(近傍形状構成点集合)、PIOはI*の重心座標値である。なお図6は、分散共分散行列MIを作成するために用いられる要素PI,I*,PIOを説明するためのモデル図であり、図中に示すPIは形状構成点Iの座標値である。
【0064】
分散共分散行列MIを作成することで、近傍形状構成点集合I*の固有値γI及びこれに対応する固有ベクトルeIが得られる。また、近傍形状構成点集合I*は3次元的な分布を表しているので、3つの固有値、すなわち第1固有値γI1,第2固有値γI2,第3固有値γI3(γI1≧γI2≧γI3)と、それぞれの固有値に対応する第1固有ベクトルeI1,第2固有ベクトルeI2,第3固有ベクトルeI3が得られる。このうち第1固有ベクトルeI1は、近傍形状構成点集合I*の主方向(主軸方向)を示す。図7は、近傍形状構成点集合I*の点分布状態と第1固有ベクトルeI1(主方向)を示すモデル図である。なおこの図では、第1固有ベクトルeI1と第2固有ベクトルeI2のみ示しており、図面垂直方向に示される第3固有ベクトルeI3は省略している。
【0065】
近傍形状構成点集合I*の固有値γIが得られると、次にこれに基づいて3つの特徴量SI、すなわち第1特徴量SI1,第2特徴量SI2,第3特徴量SI3を算出する。それぞれの特徴量は、SI1=γI1−α・γI2,SI2=γI2−γI3,SI3=β・γI3で求められる。ここで、αとβは計測手段に応じた補正係数で、適宜設定することができる。実験例としては、αとβともに整数とし、αをβよりも小さな値とすると好適な結果(柱状物体の高い認識率)が得られた。
【0066】
3つの特徴量SIを得るとこれらの大小関係から、形状構成点Iに形状分類を付与することができる(S05)。例えば、第1特徴量SI1が最大であれば形状構成点Iに「柱状物体上の点」という形状分類を付与し、第2特徴量SI2が最大であれば形状構成点Iに「平面上の点」という形状分類を付与し、第3特徴量SI3が最大であれば形状構成点Iに「その他物体上の点」という形状分類を付与することが例示できる。
【0067】
図8は、立設物が鉛直柱と水平柱と平板で構成される案内標識である場合に、形状構成点Iに対して形状分類を付与したモデル図である。この図に示す第1エリアでは、第1特徴量SI1が最大となり、ここにある形状構成点Iには「柱状物体上の点」という形状分類が付与されることとなる。また、第2エリアでは、第2特徴量SI2が最大となり、ここにある形状構成点Iには「平面上の点」という形状分類が付与されることとなる。なお、基本的に形状分類の付与は、立設物形状データを構成するすべての形状構成点Iに対して行われ、そしてすべての立設物形状データに対して行われる。
【0068】
(立設物の柱状判定)
ここまでの手順で立設物の計測点が、セグメントデータとなり、立設物形状データとなって、それぞれの形状構成点Iに対しては形状分類が付与される。この結果に基づいて、最終的に当該立設物の柱状判定を行う。
【0069】
図9は、立設物が鉛直柱と水平柱と平板で構成される案内標識である場合に、形状構成点Iに対して形状分類を付与し、さらに第1固有ベクトルeI1を加味して分類したモデル図である。この図で、Ssは案内標識の形状構成点Iの集合を示し、Csは構成点集合Ssのうち「柱状物体上の点」という形状分類が付与された形状構成点Iの集合を示し、Dsは柱状点集合Csのうち第1固有ベクトルeI1が鉛直又は鉛直に近い向きとなる形状構成点Iの集合を示している。なお、「鉛直に近い向き」とは、第1固有ベクトルeI1と鉛直方向となす角が閾値(例えば30度)以内とすることができる。
【0070】
立設物の柱状判定は、構成点集合Ss、柱状点集合Cs、鉛直点集合Dsに基づいて求められる柱状物体度を評価することで行うことができる(S06)。柱状物体度は、一例として次式によって定めることができる。
【数3】
【0071】
上記数式で、fsは柱状物体度、|Ss|は構成点集合Ssに含まれる形状構成点Iの数、|Cs|は柱状点集合Csに含まれる形状構成点Iの数、|Ds|は鉛直点集合Dsに含まれる形状構成点Iの数、w1,w2は重みである。この式では柱状物体度fsを、|Ss|のうち|Cs|が占める割合、及び|Cs|のうち|Ds|が占める割合に基づいて算出しているが、|Ss|のうち|Cs|が占める割合のみから算出することも、|Cs|のうち|Ds|が占める割合のみから算出することもできる。なお、重みw1,w2ともに整数とし、重みw1を重みw2よりも小さな値とした実験例で、好適な結果(柱状物体の高い認識率)が得られた。
【0072】
上記数式によれば柱状物体度fsは百分率で表され、大きな値を示すほど柱状物体であると評価できることがわかる(S07)。例えば、柱状物体度閾値τを設定し、柱状物体度fsが柱状物体度閾値τよりも大きな値を示す立設物を柱状物体と認識することができる。そして、この柱状物体度fsに基づく柱状判定によって、大量の計測点群から柱状物体を抽出することが可能となる。なお、柱状物体を抽出する段階で、立設物形状データの高さが所定高さ(例えば2m)以下のものや、立設物形状データを構成する形状構成点数|Ss|が所定値(例えば50点)以下のものは、柱状物体度fsにかかわらず柱状物体として認識しないとするなど、状況に応じた柱状判定とすることもできる。
【0073】
(方法、プログラム、装置)
以上説明した手順を行うことで、本願発明である柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を実施することができる。具体的には、地面点を除去する「地面除去工程」(場合によって省略可)、セグメントデータを得る「セグメンテーション工程」、細線化処理を行うことで立設物形状データを得る「細線化工程」、形状構成点Iに対して形状分類を与える「形状分類工程」、立設物の柱状判定を行う「柱状物体判定工程」を順に行うことで柱状物体抽出方法が実施できる。また、地面点を除去する「地面除去機能」(場合によって省略可)、セグメントデータを得る「セグメンテーション機能」、細線化処理を行うことで立設物形状データを得る「細線化機能」、形状構成点Iに対して固有値等を求める「主成分分析機能」、形状構成点Iに対して形状分類を与える「形状分類機能」、立設物の柱状判定を行う「柱状物体判定機能」を備え、これら機能をコンピュータに実行させるものとすることで柱状物体抽出プログラムを得ることができる。さらに、計測手段と計測点群を取得する「計測手段」、この計測点群やプログラム等を記憶するハードデスク等の記憶領域を備えた「記憶手段」、柱状物体抽出プログラムを実行させるコンピュータ等の「演算処理手段」を備えたものとすることで「柱状物体抽出装置」を得ることができる。
【0074】
3.第2の実施形態
本願発明の第2の実施形態の例を、図に基づいて説明する。図10は、第2の実施形態の概要を示すフロー図である。以下、このフロー図に沿って各手順(ステップ)を説明する。なお本実施形態では、必ずしもセグメンテーション(S02)を実施する必要がなく、このステップを省略することもできる。セグメンテーション(S02)を省略した場合、当然ながら細線化処理(S03)はm個のセグメントに対して行うことはなく、対象の計測点群全体に対して行うことになる。セグメンテーション(S02)〜形状分類の付与(S05)に関しては、本実施形態でも「第1の実施形態」と同様の内容となるため、ここでの説明は省略する。
【0075】
(地面点の除去)
計測点群が地面点を含む場合、本実施形態でも「第1の実施形態」と同様、この地面点を計測点群から取り除く処理を(S01)行ってもよい。しかしながら本実施形態では、後に説明するように、地面を取り除く処理を行うこともできるので、必ずしもここで地面点の除去の処理を実施する必要はない。
【0076】
(隣接接続グラフの生成)
ここでは、形状分類の付与された形状構成点Iどうしを連結していき、隣接接続グラフを得る処理を行う。形状構成点Iどうしを連結する際は、まず任意の形状構成点Iに着目し、その形状構成点Iにおける隣接点を探索する(S08)。そして、探索された隣接点と当該形状構成点Iでエッジを生成する。この処理を、それぞれの形状構成点Iに対して行うことで、隣接接続グラフを生成する(S09)。
【0077】
形状構成点Iにおける隣接点は、その形状構成点Iの固有ベクトルに基づいて探索される。図11は、形状構成点Iにおける隣接点を探索する状況を具体的に説明したモデル図である。この図に示すように隣接点は、形状構成点Iを中心として固有ベクトル方向に所定の広がりを有する空間範囲内で探索される。具体的には、形状構成点Iを頂点とし、中心線である固有ベクトルeIから所定角度(図ではθ)を持った円錐状の中で、隣接点は探索される。さらに、形状構成点Iから距離閾値δ以内(つまり、形状構成点Iが中心で、半径δの球体内)にあることを条件に加え、この空間範囲内で形状構成点Iに最も近い他の形状構成点Iを隣接点として選出することもできる。
【0078】
なお、形状構成点Iにおける隣接点を探索する際、その形状分類に応じて所定の固有ベクトルが選択される。記述のとおり、形状分類は特徴量SIに基づいて設定され、例えば「柱状物体上の点」、「平面上の点」、「その他物体上の点」に分類される。図12は、形状構成点Iの形状分類に応じて選択される固有ベクトルを示すモデル図で、(a)は形状分類が「柱状物体上の点」の場合に選択される固有ベクトルを示すモデル図、(b)は形状分類が「平面上の点」の場合に選択される固有ベクトルを示すモデル図、(c)は形状分類が「その他物体上の点」の場合に選択される固有ベクトルを示すモデル図である。この図に示すように、形状分類が「柱状物体上の点」の場合は、第1固有ベクトルeI1(主方向)のみが選択され、すなわち形状構成点Iから2方向(図では左右の方向)にそれぞれ円錐状の空間が設定され、それぞれ所定の範囲内から隣接点が(つまり最大2点の隣接点が)抽出される。同様に、形状分類が「平面上の点」の場合は、第1固有ベクトルeI1(主方向)と第2固有ベクトルeI2が選択され、すなわち形状構成点Iから4方向(図では上下左右の4方向)にそれぞれ円錐状の空間が設定され、それぞれ所定の範囲内から隣接点が(つまり最大4点の隣接点が)抽出される。また、形状分類が「その他物体上の点」の場合は、第1固有ベクトルeI1(主方向)、第2固有ベクトルeI2、及び第3固有ベクトルeI3が選択され、すなわち形状構成点Iから6方向にそれぞれ円錐状の空間が設定され、それぞれ所定の範囲内から隣接点が(つまり最大6点の隣接点が)抽出される。
【0079】
(基本コンポーネントの形成)
ここでは、同じ形状分類が付与された形状構成点Iどうしを連結していき、一つの連続成分を基本コンポーネントして得る処理を行う(S10)。形状構成点Iどうしを連結する際は、まず任意の形状構成点Iに着目し、その形状構成点Iにおける隣接点を探索し、その隣接点が同じ形状分類であればエッジを生成して一つの領域を構築する。続いて、追加された隣接点を新たな形状構成点Iとして着目し、同様の処理で隣接点をその領域に追加する。そして、同じ形状分類が付与された隣接点が探索されなくなるまで、隣接点の追加を繰り返し行い、その結果得られる一つの領域(連続成分)が基本コンポーネントである。このように、任意の点から所定条件を基に領域を広げていく手法は領域成長法とも呼ばれ、つまり基本コンポーントは領域成長法を用いて生成される。
【0080】
図13は、異なる基本コンポーネントが複数生成された状態を示すモデル図である。この図に示すように、異なる形状分類をもつ領域ごとに基本コンポーネントが生成され、また異なる基本コンポーネントどうしであっても、隣接関係がある(隣接点となる条件を満たす)形状構成点Iどうしはエッジが生成される。
【0081】
(基本コンポーネントの分類)
基本コンポーネントの分類では、その特性に応じて基本コンポーネントを分類する処理を行う(S11a〜S11d)。ここでは、地面を形成している地面コンポーネント、電線など接続物を形成している接続物コンポーネント、支柱を形成している支柱コンポーネント、壁面を形成している壁面コンポーネントについて説明する。
【0082】
地面点に基づく地面コンポーネントは柱状物体を構成するものではなく、したがって柱状物体を的確に抽出する場合、地面コンポーネントは取り除くことが望ましい。基本コンポーネントの中から地面コンポーネントを認識するには、以下の条件等に基づいて行う。地面コンポーネントは面状であることから、形状分類が「平面上の点」である基本コンポーネントを選択する。そして、その基本コンポーネントが略水平であるものを地面コンポーネントとして認識する(S11a)。このとき、基本コンポーネントを構成する形状構成点Iの数が一定数以上とすることも条件に加えることができる。
【0083】
基本コンポーネントが略水平であるか否かの判定は、その基本コンポーネントを構成する形状構成点Iに基づいて行うことができる。すなわち、隣接する形状構成点Iどうしを連結して三角形の面を多数形成する。すると、形状構成点Iの周囲には複数の三角面が存在し、それら三角面の法線方向に基づいて(例えば法線方向の平均値を採用して)、その形状構成点Iの法線方向を求めることができる。あるいは、単に第3固有ベクトルeI3を、その形状構成点Iの法線方向とすることもできる。基本コンポーネント内の全ての形状構成点Iについて法線方向が求められると、法線方向を所定のレンジに分けてヒストグラムを作成する。このヒストグラムの最大レンジ(90度に近いレンジ)で計上される形状構成点Iの数が最も多ければ、その基本コンポーネントは全体的に概ね水平であると判断することができる。
【0084】
図14に示すように、電線等の接続物を計測した計測点に基づく接続物コンポーネントは柱状物体を構成するものではなく、したがって柱状物体を的確に抽出する場合、接続物コンポーネントは取り除くことが望ましい。基本コンポーネントの中から接続物コンポーネントを認識するには、以下の条件等に基づいて行う。接続物コンポーネントは線状であることから、形状分類が「柱状物体上の点」である基本コンポーネントを選択する。そして、その基本コンポーネントが略水平であるものを接続物コンポーネントとして認識する(S11b)。このとき、基本コンポーネントを構成する形状構成点Iの数が一定数以上とすることも条件に加えることができる。
【0085】
基本コンポーネントが略水平であるか否かの判定は、その基本コンポーネントを構成する形状構成点Iに基づいて行うことができる。すなわち、形状構成点Iの第1固有ベクトルeI1(主軸方向)が略水平(水平方向から閾値範囲内)であれば、その基本コンポーネントは全体的に概ね水平であると判断することができる。
【0086】
支柱コンポーネントは、柱状物体を構成する基幹の基本コンポーネントである。基本コンポーネントの中から支柱コンポーネントを認識するには、以下の条件等に基づいて行う。接続物コンポーネントは線状であることから、形状分類が「柱状物体上の点」である基本コンポーネントを選択する。そして、その基本コンポーネントが略鉛直(鉛直方向から閾値範囲内)であるものを支柱コンポーネントとして認識する(S11c)。このとき、基本コンポーネントを構成する形状構成点Iの数が一定数以上とすることも条件に加えることができる。
【0087】
基本コンポーネントが略鉛直にあるという条件に代えて、基本コンポーネントの断面形状が略円形であることを条件に支柱コンポーネントを認識することもできる。図15は、支柱コンポーネントの断面形状が略円形の一部を形成していることを示すモデル図である。基本コンポーネントの断面形状は、形状構成点Iの第1固有ベクトルeI1(主軸方向)に対して垂直に切った断面で考えられ、そこに投影される形状構成点Iが円形(あるいは円形の一部)に近い位置にあれば、支柱コンポーネントとして認識する。このとき、円形に近い位置にあるか否かは、RANSACのような手法を用いて判断することができる。
【0088】
また、図13に示すように、異なる支柱コンポーネントが複数生成された場合、最も下に位置する基本コンポーネントのみを支柱コンポーネントとして認識することもできる。この場合、上記の条件に加え、連結された複数の基本コンポーネントから地面コンポーネントを除き、複数の支柱コンポーネント(候補)のうち最小の標高値(3次元座標のうちのZ)を有することを支柱コンポーネントとして認識する条件とする。
【0089】
壁面を計測した計測点に基づく壁面コンポーネントは柱状物体を構成するものではなく、したがって柱状物体を的確に抽出する場合、壁面コンポーネントは取り除くことが望ましい。基本コンポーネントの中から壁面コンポーネントを認識するには、以下の条件等に基づいて行う。壁面コンポーネントは面状であることから、形状分類が「平面上の点」である基本コンポーネントを選択する。そして、その基本コンポーネントが略鉛直であるものを壁面コンポーネントとして認識する(S11d)。このとき、基本コンポーネントを構成する形状構成点Iの数が一定数以上とすること、あるいはその基本コンポーネントが所定の面積以上とすることも条件に加えることができる。
【0090】
基本コンポーネントが略鉛直であるか否かの判定は、地面コンポーネントで説明した手法を用い、ヒストグラムの最小レンジ(0度に近いレンジ)で計上される形状構成点Iの数が最も多ければ、その基本コンポーネントは全体的に概ね鉛直であると判断することができる。
【0091】
(柱状物体セグメントの作成)
支柱コンポーネントが認識されると、この支柱コンポーネントを基に柱状物体セグメントが作成される(S12)。支柱コンポーネント内にある形状構成点Iと隣接関係ある形状構成点Iは、他の基本コンポーネントを構成するものであってもエッジが生成されている。つまり、異なる基本コンポーネントをであっても連結されることがある。図13に示すように、支柱コンポーネントから次々に連結されていく基本コンポーネントをまとめて、一つの柱状物体セグメントが作成される。このとき、前出の地面コンポーネントと接続物コンポーネントは除いたうえで、柱状物体セグメントを作成することが望ましい。なお、他に連結される基本コンポーネントがない場合は、支柱コンポーネント単体で柱状物体セグメントが作成される。
【0092】
以上のように作成された柱状物体セグメントは、柱状物体として認識することができ、すなわち、大量の計測点群の中から的確に柱状物体を抽出することができる。
【0093】
(方法、プログラム、装置)
以上説明した手順を行うことで、本願発明である柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を実施することができる。具体的には、セグメントデータを得る「セグメンテーション工程」、細線化処理を行うことで立設物形状データを得る「細線化工程」、形状構成点に対して形状分類を与える「形状分類工程」、立設物の柱状判定を行う「柱状物体判定工程」を順に行うことで柱状物体抽出方法が実施できる。「柱状物体判定工程」は、隣接接続グラフを得る「隣接接続グラフ生成工程」と、基本コンポーネントを得る「基本コンポーネント形成工程」と、「支柱コンポーネント」など各種コンポーネントに分ける「基本コンポーネント分類工程」と、柱状物体セグメントを作成する「柱状物体セグメント作成工程」を含んでいる。また、セグメントデータを得る「セグメンテーション機能」、細線化処理を行うことで立設物形状データを得る「細線化機能」、形状構成点に対して固有値等を求める「主成分分析機能」、形状構成点に対して形状分類を与える「形状分類機能」、立設物の柱状判定を行う「柱状物体判定機能」を備え、さらに「柱状物体判定機能」は、隣接接続グラフを得る「隣接接続グラフ生成機能」と、基本コンポーネントを得る「基本コンポーネント形成工程機能」と、「支柱コンポーネント」など各種コンポーネントに分ける「基本コンポーネント分類機能」と、柱状物体セグメントを作成する「柱状物体セグメント作成機能」を含んでいる。これら機能をコンピュータに実行させるものとすることで柱状物体抽出プログラムを得ることができる。さらに、計測手段と計測点群を取得する「計測手段」、この計測点群やプログラム等を記憶するハードデスク等の記憶領域を備えた「記憶手段」、柱状物体抽出プログラムを実行させるコンピュータ等の「演算処理手段」を備えたものとすることで「柱状物体抽出装置」を得ることができる。
【0094】
4.第3の実施形態
ここまで第1の実施形態や第2の実施形態で、柱状物体であること認識する技術について説明した。一方、「柱状物体」は比較的広い概念であり、一般的には、柱状物体というよりも電柱、街灯、標識のような具体的な種別で認識されている。ここでは、柱状物体として認識されたものを、さらに具体的な種別に分類する手法について説明する。なお、ここでは柱状物体の種別として、電柱、街灯、標識の3種類を例にしている。
【0095】
図16は、柱状物体を種別分類する手順を示すフロー図である。柱状物体を種別分類するためには、それぞれ電柱、街灯、標識の特性を利用することになる。ここでは、柱状物体の構成から支柱(と認められるもの)を除いたものを「パーツ」としてとらえ、そのパーツの特性に着目して種別分類を行う。
【0096】
(支柱候補点の抽出)
第1の実施形態や第2の実施形態で与えられた形状構成点Iの形状分類と、形状構成点Iの第1固有ベクトルeI1(主方向)に基づいて、支柱候補点を抽出する(図16のS13)。記述のとおり、形状分類は特徴量SIに基づいて設定され、例えば「柱状物体上の点」、「平面上の点」、「その他物体上の点」に分類される。この形状分類が「柱状物体上の点」であって、第1固有ベクトルeI1(主方向)が略鉛直(鉛直方向から閾値範囲内)である形状構成点Iが、支柱候補点として抽出される。このとき、支柱候補点を所定平面に投影させると、所定半径の円形に近い位置にあるもののみを支柱候補点として残すこともできる。この場合は、RANSACのような手法を用いて判断することができる。なお、第2の実施形態においては、支柱コンポーネントを構成する形状構成点Iが、支柱候補点として抽出されることとしてもよい。
【0097】
次に、支柱候補点から近い形状構成点I、具体的には支柱候補点から所定の閾値(距離)以内にある形状構成点Iも抽出する。ここで抽出された形状構成点Iと、支柱候補点とを合わせて支柱構成点として確定する(S14)。
【0098】
次に、立設物形状データ(第1の実施形態)や柱状物体セグメント(第2の実施形態)を構成する形状構成点Iのうち、支柱構成点とされたものを除く。その結果、得られるのがパーツを構成する形状構成点Iである。これらパーツを構成する形状構成点Iは、エッジで連結されているもの(第2の実施形態の場合は基本コンポーネント(図13))であり、このエッジで連結された連続成分をパーツとして抽出する(S15)。
【0099】
パーツは、立設物形状データ(第1の実施形態)や柱状物体セグメント(第2の実施形態)から支柱を除いて得られるパーツである。一つの立設物形状データや柱状物体セグメント(以下、本実施形態ではこれらをまとめて「柱状物体セグメント等」という。)には、複数のパーツが存在することもあるし、一つだけの場合もある。また、パーツは一つの個別要素(第2の実施形態の場合は基本コンポーネント)から構成されることもあるし、複数の個別要素が連結して構成されることもある。このように種々ある構成を、あらかじめ設定した種別(パーツタイプ)に分けるのがパーツ分類である(S16)。図17は、個別要素の形状分類や、個別要素の組み合わせに基づいて分類されたパーツタイプの例を示すモデル図である。例えば、形状分類が「柱状物体上の点」である個別要素のみからなるパーツは「棒」というパーツタイプに分類され(A)、形状分類が「平面上の点」である個別要素のみからなるパーツは「面」というパーツタイプに分類され(B)、形状分類が「その他物体上の点」である個別要素のみからなるパーツは「立体」というパーツタイプに分類される(C)。また、形状分類が「柱状物体上の点」である個別要素と、形状分類が「平面上の点」である個別要素によって構成されるパーツは「棒+面」というパーツタイプに分類される(D)。ここでは、8種類のパーツタイプを設定している。すなわち、パーツタイプAが「棒」、パーツタイプBが「面」、パーツタイプCが「立体」、パーツタイプDが「棒+面」、パーツタイプEが「棒+立体」、パーツタイプFが「面+立体」、パーツタイプGが「棒+面+立体」、パーツタイプHが「その他」である。
【0100】
抽出されたパーツにそれぞれパーツタイプが付与されると、柱状物体セグメント等ごとに帰属度が算出される(S17)。帰属度とは、その柱状物体セグメント等が電柱、街灯、標識に帰属する度合いを示すものであり、電柱の帰属度、街灯の帰属度、標識の帰属度の3種類が算出され、最も大きな値を示す帰属度に従って種別を判定する(S18)。
【0101】
それぞれの帰属度は、柱状物体セグメント等の高さ、柱状物体セグメント等に含まれるパーツの数、及びパーツタイプに関する評価に基づいて算出され、具体的には次式によって求められる。
【0102】
上式左辺のfiは帰属度で、i=1のときに電柱の帰属度が、i=2のときに街灯の帰属度が、i=3のときに標識の帰属度が求められる。また、右辺にあるhsは柱状物体セグメント等の高さ、nsは柱状物体セグメント等に含まれるパーツの数、Tsはパーツタイプに関する評価であり、fHi(hs)は柱状物体セグメント等の高さによる関数、fNi(ns)はパーツ数による関数、fTi(Ts)はパーツタイプによる関数である。fHi(hs)、fNi(ns)、fTi(Ts)はそれぞれ次式で求められる。
【0103】
(6−1)式のhminは、図18にも示すように種別によって異なる値が採られ、例えば、電柱の場合hmin=6.5m、街灯の場合hmin=3.0m、標識の場合hmin=2.0mとすることができる。同様にhmaxも種別によって異なる値が採られ、例えば、電柱の場合hmax=15.0m、街灯の場合hmax=12.0m、標識の場合hmax=6.5mとすることができる。
【0104】
(6−2)式のパラメータaとbは、図18にも示すように種別によって異なる値が採られ、例えば、電柱の場合a=0.1,b=0、街灯の場合a=−0.2,b=1.0、標識の場合a=−0.3,b=0.9とすることができる。
【0105】
(6−3)式の「該当するパーツタイプの数」とは、種別ごとにあらかじめ定められたパーツタイプに該当するパーツ数である。例えば、電柱の場合は「パーツタイプC又はパーツタイプH」、街灯の場合は「パーツタイプA又はパーツタイプE」、標識の場合は「パーツタイプB、パーツタイプD、パーツタイプF、又はパーツタイプG」のように設定することができる。この場合、柱状物体セグメント等の中にパーツ数nsが8個で、パーツタイプAが1個、パーツタイプBが1個、パーツタイプCが2個、パーツタイプHが4個とすると、電柱のfT1(Ts)=6/8=0.75、街灯のfT2(Ts)=1/8=0.125、標識のfT3(Ts)=1/8=0.125となる。
【0106】
このように柱状物体セグメント等ごとに、電柱、街灯、標識ごとにfHi(hs)、fNi(ns)、fTi(Ts)が算出され、これらを加算することで電柱の帰属度、街灯の帰属度、標識の帰属度がそれぞれ求められる。そして、例えば電柱の帰属度が最も大きな値を示す場合は、その柱状物体セグメント等は「電柱」と評価され、街灯の帰属度が最も大きな値を示す場合は、その柱状物体セグメント等は「街灯」と評価され、標識の帰属度が最も大きな値を示す場合は、その柱状物体セグメント等は「標識」と評価される。
【0107】
(コンテクスト特徴量に基づく種別認識)
記述した帰属度による柱状物体の種別(電柱、街灯、標識)認識では、場合によっては誤った認識をすることも考えられる。ここでは、コンテクスト特徴量を用いてより的確に柱状物体の種別認識を行う手法について説明する。
【0108】
通常、電柱や街灯は、等間隔で配置される。また、電柱と街灯の位置関係も規則性が認められることがある。このような「配置」に着目し、標準的な配置モデルと、評価しようとする柱状物体セグメント等の周辺の配置を比較することで、より的確な種別認識を行う。図19は、コンテクスト特徴量に基づいて柱状物体の種別を分類する手順を示すフロー図である。記述のとおり、柱状物体セグメント等ごとに帰属度(電柱、街灯、標識の3種類の帰属度)が算出される(S17)。
【0109】
対象となる範囲(例えば、対象となる市街地)に対して平面状にグリッドを設定する(S19)。グリッドは任意の間隔で、縦軸と横軸が交差するように設定する。このとき縦軸と横軸の交差は直行(交差角度90度に)することもできるし、他の斜角を選んで交差させることもできる。
【0110】
グリッドが設定されると、グリッドで囲まれた多数の升目(メッシュ)が形成される。柱状物体セグメント等は平面座標を備えているので、その柱状物体セグメント等がどのメッシュ内に存在するか、あるいはどのメッシュに最も近いか、ということが認識できる。したがって、柱状物体セグメント等をメッシュに配置することが可能で、その柱状物体セグメント等の帰属度(電柱、街灯、標識の3種類の帰属度)をメッシュに配点することができる(S20)。
【0111】
次に、評価する範囲(エリア)を設定する(S21)。すなわち、評価しようとする柱状物体セグメント等の周辺範囲をどの程度まで広げるかを決定する。ここでは、既にメッシュが形成されているので、図20に示すように、メッシュの数(縦の数×横の数)を決めることでエリアを設定する。
【0112】
エリアが設定されると、標準的な配置である「標準分布マップ」を作成する(S22)。この標準分布マップは、設定されたエリアを対象に作成する。標準分布マップは、例えば、電柱の周辺にはどのような標識の帰属度が配点されているか、ということに基づいて作成するものであり、電柱の標準分布マップは電柱、街灯、標識の帰属度を配点した3種類のものが作成され、同様に、街灯の標準分布マップも3種類、標識の標準分布マップも3種類が作成される。なお、標準的な配置は、人によって判断してもよいし、帰属度の高いものの配置を集約して平均値をとるなど計算により求めてもよい。
【0113】
評価しようとする柱状物体セグメント等に着目し、これを中心にエリアを設定し、周辺にある電柱、街灯、標識それぞれの帰属度を配点した3種類のマップ(周辺分布マップ)を作成する(S23)。図21は、3種類の周辺分布マップを示すモデル図である。
【0114】
標準分布マップが作成され、周辺分布マップが作成されると、コンテクスト特徴量を算出する(S24)。図22は、コンテクスト特徴量の算出方法を示すモデル図である。この図に示すようにコンテクスト特徴量は、周辺分布マップと標準分布マップを対応させて算出する。
【0115】
まず、着目する柱状物体セグメント等が「電柱」であるとして、電柱の標準分布マップを用意する。このとき、周辺分布マップは電柱、街灯、標識の帰属度が配点された3種類あり、電柱の標準分布マップも電柱、街灯、標識の帰属度が配点された3種類のものが用意される。そして、それぞれマップに形成されたメッシュは、設定されたエリアに基づいて配置されているので、配置や数は同じである。電柱帰属度の周辺分布マップと、同じく電柱帰属度の標準分布マップを照らし合わせ、同じメッシュどうしの電柱帰属度を乗算する。次に、街灯帰属度の標準分布マップと周辺分布マップを照らし合わせて、同じメッシュどうしの電柱帰属度を乗算し、標識帰属度の標準分布マップと周辺分布マップを照らし合わせて、同じメッシュどうしの電柱帰属度を乗算する。最後に、全てのメッシュ(電柱、街灯、標識)の乗算値を総和すると電柱のコンテクスト特徴量が算出される。
【0116】
同様の手順で、今度は着目する柱状物体セグメント等が「街灯」であるとして、街灯の標準分布マップを用意し、街灯の帰属度が配点された周辺分布マップと照らし合わせて、街灯のコンテクスト特徴量を算出する。さらに同様の手順で、標識のコンテクスト特徴量を算出する。この結果、最も大きな値を示したコンテクスト特徴量に基づいて、柱状物体セグメント等の種別を判定することができる。例えば電柱のコンテクスト特徴量が最も大きな値を示す場合は、その柱状物体セグメント等は「電柱」と評価され、街灯のコンテクスト特徴量が最も大きな値を示す場合は、その柱状物体セグメント等は「街灯」と評価され、標識のコンテクスト特徴量が最も大きな値を示す場合は、その柱状物体セグメント等は「標識」と評価される。
【0117】
図23に、コンテクスト特徴量を算出した具体例を示した。この図では、横9メッシュ×縦1メッシュのエリアを設定しており、上から周辺分布マップ、標準分布マップ、コンテクスト特徴量の順で示している。周辺分布マップは、着目する柱状物体セグメント等(車線のメッシュ)の周辺に電柱の帰属度を配点しており、以下2行目は街灯の帰属度を、3行目は標識の帰属度を配点している。
【0118】
標準分布マップは、電柱、街灯、標識の順で示しており、それぞれ1行目が電柱の帰属度を配点したもの、2行目が街灯の帰属度を配点したもの、3行目が標識の帰属度を配点したものとしている。
【0119】
コンテクスト特徴量は、周辺分布マップと電柱の標準分布マップを照らし合わせて算出したコンテクスト特徴量、周辺分布マップと街灯の標準分布マップを照らし合わせて算出したコンテクスト特徴量、周辺分布マップと標識の標準分布マップを照らし合わせて算出したコンテクスト特徴量、の順で示しており、それぞれ1行目が電柱の帰属度をメッシュごとに対応して乗算した値、2行目が街灯の帰属度をメッシュごとに対応して乗算した値、3行目が標識の帰属度をメッシュごとに対応して乗算した値である。この結果、電柱のコンテクスト特徴量(3.57)が最も大きな値となるので、当該柱状物体セグメント等は、「電柱」として評価することができる。
【0120】
(方法、プログラム、装置)
以上説明した手順を行うことで、本願発明である柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を実施することができる。
【産業上の利用可能性】
【0121】
本願発明の柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置は、立設物のうち柱状物体を抽出する発明であるが、この発明を応用することで看板や壁面などのような板状物体を抽出することも、柱状物体や板状物体以外に分類されるものを抽出することもできる。また、ポールに看板を取り付けたもののように、柱状物体と板状物体を組み合わせたものを抽出することも可能である。これによって、様々な立設物管理に利用することができる。
【符号の説明】
【0122】
i 任意計測点
j 近傍計測点
q 他の近傍計測点
r (限界距離)半径
I* 近傍形状構成点集合
PI 形状構成点の座標値
PIO I*の重心座標値
PJ 近傍形状構成点の座標値
θ 挟角
Ss 構成点集合
Cs 柱状点集合
Ds 鉛直点集合
【特許請求の範囲】
【請求項1】
地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、該立設物のうちその形状が柱状である柱状物体を抽出する方法において、
前記計測点群から、それぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、
それぞれの前記セグメントデータに対して、立設物の形状特徴を明確にする細線化処理を行うことで立設物形状データを得る細線化工程と、
前記立設物形状データを構成する形状構成点に対して、それぞれ主成分分析を行って固有値及び固有ベクトルを求めるとともに、該固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、
前記形状構成点の前記形状分類に基づいて、立設物の柱状判定を行う柱状物体判定工程と、を備え、
前記セグメンテーション工程は、任意計測点とこの点に近い近傍計測点との間でエッジを生成し、その結果得られる一つの連続成分を一つのセグメントデータとして得るものであり、
前記細線化工程における前記細線化処理は、前記任意計測点の位置を移動させるものであって、前記任意計測点、前記近傍計測点、及び前記任意計測点における前記近傍計測点2点との挟角から求められる細線化強度に基づいて、移動後の任意計測点位置を求めるものである、ことを特徴とする柱状物体抽出方法。
【請求項2】
前記セグメンテーション工程は、前記任意計測点から近い順に所定数k個の前記近傍計測点を選出し、この近傍計測点と前記任意計測点との間でエッジを生成することでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとして得る、ことを特徴とする請求項1記載の柱状物体抽出方法。
【請求項3】
主成分分析によって得られる前記固有値は、値の大きなものから順に、第一固有値、第二固有値、第三固有値とされ、
主成分分析によって得られる前記固有ベクトルは、第一固有値に対応するものが第一固有ベクトル、第二固有値に対応するものが第二固有ベクトル、第三固有値に対応するものが第三固有ベクトルとされ、
前記特徴量は、前記第一固有値と第二固有値に基づいて算出される第一特徴量と、前記第二固有値と第三固有値に基づいて算出される第二特徴量と、前記第三固有値に基づいて算出される第三特徴量と、で構成され、
前記形状分類は、「柱状物体上の点」を含む2以上の分類で構成され、前記特徴量のうち前記第一特徴量が最大値を示す前記形状構成点には形状分類として「柱状物体上の点」が付与される、ことを特徴とする請求項1又は請求項2記載の柱状物体抽出方法。
【請求項4】
前記柱状物体判定工程における前記立設物の柱状判定は、前記立設物形状データを構成する形状構成点のうち「柱状物体上の点」に分類された形状構成点が占める割合、又は/及び「柱状物体上の点」に分類された形状構成点のうち前記第一固有ベクトルが鉛直又は鉛直に近い向きである形状構成点が占める割合に基づいて、該立設物形状データの柱状物体度を求め、この柱状物体度を評価することで立設物の柱状判定を行う、ことを特徴とする請求項3記載の柱状物体抽出方法。
【請求項5】
前記柱状物体判定工程は、隣接接続グラフ生成工程と、基本コンポーネント形成工程と、基本コンポーネント分類工程と、柱状物体セグメント作成工程と、を含み、
前記隣接接続グラフ生成工程は、前記各形状構成点の前記固有ベクトルに基づいて、各形状構成点と隣接関係にある隣接点を求めるとともに、該隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの隣接接続グラフとして得るものであり、
前記基本コンポーネント形成工程は、前記隣接接続グラフを構成する各形状構成点に対して、各形状構成点と同一の形状分類が付与された前記隣接点を求めるとともに、該隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの基本コンポーネントとして得るものであり、
前記基本コンポーネント分類工程は、前記基本コンポーネントに対して前記形状分類に応じたコンポーンネントを分類するものであって、形状分類が「柱状物体上の点」である基本コンポーネントは「支柱コンポーネント」に分類し、
前記柱状物体セグメント作成工程は、前記支柱コンポーネントを含む前記隣接接続グラフを抽出するとともに、該隣接接続グラフに含まれる1又は2以上の前記基本コンポーネントを結合して柱状物体セグメントを作成するものであり、
前記隣接点は、前記形状構成点から前記固有ベクトル方向に向けて拡張される空間範囲内において、前記形状構成点から最も近い形状構成点が選ばれ、
前記柱状物体セグメントに基づいて、立設物の柱状判定を行う、ことを特徴とする請求項3記載の柱状物体抽出方法。
【請求項6】
前記基本コンポーネント分類工程は、一つの隣接接続グラフ内に、その形状分類が「柱状物体上の点」である基本コンポーネントが2以上含まれる場合、形状分類が「柱状物体上の点」である基本コンポーネントのうち最小の標高値を具備するものを、「支柱コンポーネント」と分類する、ことを特徴とする請求項5記載の柱状物体抽出方法。
【請求項7】
前記第二特徴量が最大値を示す前記形状構成点には、前記形状分類として「平面上の点」が付与され、
前記基本コンポーネント分類工程は、形状分類が「平面上の点」である基本コンポーネントは「平面コンポーネント」に分類するとともに、平面コンポーネントを構成する形状構成点によって形成される面の法線方向に基づいて、略水平な平面コンポーネントを「地面コンポーネント」として抽出し、
前記柱状物体セグメント作成工程は、前記地面コンポーネントを除いたうえで、1又は2以上の前記基本コンポーネントを結合して前記柱状物体セグメントを作成する、ことを特徴とする請求項5又は請求項6記載の柱状物体抽出方法。
【請求項8】
前記基本コンポーネント分類工程は、その形状分類が「柱状物体上の点」の基本コンポーネントであって、基本コンポーネントを構成する形状構成点の前記第一固有ベクトルが略水平な基本コンポーネントを「接続物コンポーネント」として抽出し、
前記柱状物体セグメント作成工程は、前記接続物コンポーネントを除いたうえで、1又は2以上の前記基本コンポーネントを結合して柱状物体セグメントを作成する、ことを特徴とする請求項5乃至請求項7のいずれかに記載の柱状物体抽出方法。
【請求項9】
前記柱状物体セグメントを構成する基本コンポーネントのうち、支柱コンポーネント以外の基本コンポーネントであって、相互に連結された基本コンポーネントの組み合わせをパーツとして抽出し、
前記パーツを、前記形状分類に基づくパーツタイプに分類し、
前記柱状物体セグメントの高さ、柱状物体セグメントに含まれる前記パーツの数、及びパーツタイプに関する評価に基づいて、柱状物体セグメントの帰属度を求め、
前記帰属度に基づいて、柱状物体の種類を選別する、ことを特徴とする請求項5乃至請求項8のいずれかに記載の柱状物体抽出方法。
【請求項10】
前記立設物形状データのうち、「柱状物体上の点」に分類された形状構成点であって、前記第一固有ベクトルが略鉛直方向である形状構成点を支柱候補点とし、
前記支柱候補点から所定距離内にある形状構成点と、前記支柱候補点とを、まとめて支柱構成点とし、
前記立設物形状データのうち、前記支柱構成点以外の形状構成点で構成される連続成分を、パーツとして抽出し、
前記パーツを、前記形状分類に基づくパーツタイプに分類し、
前記立設物形状データの高さ、立設物形状データに含まれる前記パーツの数、及びパーツタイプに関する評価に基づいて、立設物形状データの帰属度を求め、
前記帰属度に基づいて、柱状物体の種類を選別する、ことを特徴とする請求項3又は請求項4記載の柱状物体抽出方法。
【請求項11】
所定のグリッドによって複数のメッシュを構成するとともに、前記帰属度を最も近いメッシュに配点し、
所定数の前記メッシュで構成されるエリアを設定し、
前記エリアに基づいて、柱状物体の種類ごとに標準分布マップを作成し、
前記エリアに基づき、各柱状物体セグメント又は各立設物形状データに対して、周辺分布マップを作成し、
さらに、前記標準分布マップ及び前記周辺分布マップに基づいて、当該柱状物体セグメント又は立設物形状データに対して、コンテクスト特徴量を算出し、
前記コンテクスト特徴量に基づいて、柱状物体の種類を選別する、ことを特徴とする請求項9又は請求項10記載の柱状物体抽出方法。
【請求項12】
地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、該立設物のうちその形状が柱状である柱状物体を抽出する機能をコンピュータに実行させる柱状物体抽出プログラムにおいて、
前記計測点群から、それぞれ独立した領域ごとにセグメントデータを作成するセグメンテーション機能と、
それぞれの前記セグメントデータに対して、立設物の形状特徴を明確にする細線化処理を行って立設物形状データを作成する細線化機能と、
前記立設物形状データを構成する形状構成点に対して、それぞれ主成分分析のための演算処理を行って固有値及び固有ベクトルを求める主成分分析機能と、
さらにそれぞれの前記形状構成点に対して、前記固有値を基に算出される特徴量に応じた形状分類を付与する形状分類機能と、
前記形状構成点の前記特徴量に基づいて、立設物の柱状判定処理を行う柱状物体判定機能と、を備え、
前記セグメンテーション機能は、任意計測点とこの点に近い近傍計測点との間でエッジを発生させ、その結果得られる一つの連続成分を一つのセグメントデータとするものであり、
前記細線化機能で行われる前記細線化処理は、前記任意計測点の位置を移動させるものであって、前記任意計測点における前記近傍計測点2点との挟角を算出し、この挟角と前記任意計測点と前記近傍計測点とに基づいて、移動後の任意計測点位置を算出するものである、ことを特徴とする柱状物体抽出プログラム。
【請求項13】
前記セグメンテーション機能は、前記任意計測点から近い順に所定数k個の前記近傍計測点を選出し、この近傍計測点と前記任意計測点との間でエッジを発生させることでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとするものである、ことを特徴とする請求項12記載の柱状物体抽出プログラム。
【請求項14】
主成分分析機能によって求められる前記固有値は、値の大きなものから順に、第一固有値、第二固有値、第三固有値であり、
主成分分析機能によって求められる前記固有ベクトルは、第一固有値に対応するものが第一固有ベクトル、第二固有値に対応するものが第二固有ベクトル、第三固有値に対応するものが第三固有ベクトルであり、
前記特徴量は、前記第一固有値と第二固有値に基づいて算出される第一特徴量と、前記第二固有値と第三固有値に基づいて算出される第二特徴量と、前記第三固有値に基づいて算出される第三特徴量と、で構成され、
前記形状分類は、「柱状物体上の点」を含む2以上の分類で構成され、前記特徴量のうち前記第一特徴量が最大値を示す前記形状構成点には形状分類として「柱状物体上の点」が付与される、ことを特徴とする請求項12又は請求項13記載の柱状物体抽出プログラム。
【請求項15】
前記柱状物体判定機能における柱状判定処理は、前記立設物形状データを構成する形状構成点のうち「柱状物体上の点」に分類された形状構成点が占める割合、又は/及び「柱状物体上の点」に分類された形状構成点のうち固有ベクトルが鉛直又は鉛直に近い向きである形状構成点が占める割合に基づいて、該立設物形状データの柱状物体度を算出し、この柱状物体度を評価することで立設物の柱状判定を行うものである、ことを特徴とする請求項14記載の柱状物体抽出プログラム。
【請求項16】
前記柱状物体判定機能は、隣接接続グラフ生成機能と、基本コンポーネント形成機能と、基本コンポーネント分類機能と、柱状物体セグメント作成機能と、を含み、
前記隣接接続グラフ生成機能は、前記各形状構成点の前記固有ベクトルに基づいて、各形状構成点と隣接関係にある隣接点を選出するとともに、該隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの隣接接続グラフとするものであり、
前記基本コンポーネント形成機能は、前記隣接接続グラフを構成する各形状構成点に対して、各形状構成点と同一の形状分類が付与された前記隣接点を選出するとともに、該隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの基本コンポーネントとするものであり、
前記基本コンポーネント分類機能は、前記基本コンポーネントに対して前記形状分類に応じたコンポーンネント分類を付与するものであって、形状分類が「柱状物体上の点」である基本コンポーネントにはコンポーンネント分類として「支柱コンポーネント」を付与し、
前記柱状物体セグメント作成機能は、前記支柱コンポーネントを含む前記隣接接続グラフを抽出するとともに、該隣接接続グラフに含まれる1又は2以上の前記基本コンポーネントを結合して柱状物体セグメントを作成するものであり、
前記隣接点は、前記形状構成点から前記固有ベクトル方向に向けて拡張される空間範囲内において、前記形状構成点から最も近い形状構成点が選ばれ、
前記柱状物体セグメントに基づいて、立設物の柱状判定を行う、ことを特徴とする請求項14記載の柱状物体抽出プログラム。
【請求項17】
前記基本コンポーネント分類機能は、一つの隣接接続グラフ内に、その形状分類が「柱状物体上の点」である基本コンポーネントが2以上含まれる場合、形状分類が「柱状物体上の点」である基本コンポーネントのうち最小の標高値を具備するものに、コンポーンネント分類として「支柱コンポーネント」を付与する、ことを特徴とする請求項16記載の柱状物体抽出プログラム。
【請求項18】
前記第二特徴量が最大値を示す前記形状構成点には、前記形状分類として「平面上の点」を付与し、
前記基本コンポーネント分類機能は、形状分類が「平面上の点」である基本コンポーネントには、コンポーンネント分類として「平面コンポーネント」を付与するとともに、平面コンポーネントを構成する形状構成点によって形成される面の法線方向に基づいて、略水平な平面コンポーネントを「地面コンポーネント」として抽出し、
前記柱状物体セグメント作成機能は、前記地面コンポーネントを除いたうえで、1又は2以上の前記基本コンポーネントを結合して前記柱状物体セグメントを作成する、ことを特徴とする請求項16又は請求項17記載の柱状物体抽出プログラム。
【請求項19】
前記基本コンポーネント分類機能は、その形状分類が「柱状物体上の点」の基本コンポーネントであって、基本コンポーネントを構成する形状構成点の前記第一固有ベクトルが略水平な基本コンポーネントを「接続物コンポーネント」として抽出し、
前記柱状物体セグメント作成機能は、前記接続物コンポーネントを除いたうえで、1又は2以上の前記基本コンポーネントを結合して柱状物体セグメントを作成する、ことを特徴とする請求項16乃至請求項18のいずれかに記載の柱状物体抽出プログラム。
【請求項20】
前記柱状物体セグメントを構成する基本コンポーネントのうち、支柱コンポーネント以外の基本コンポーネントであって、相互に連結された基本コンポーネントの組み合わせをパーツとして抽出するパーツ抽出機能と、
前記パーツを、前記形状分類に基づくパーツタイプに分類するパーツタイプ分類機能と、
前記柱状物体セグメントの高さ、柱状物体セグメントに含まれる前記パーツの数、及びパーツタイプに関する評価に基づいて、柱状物体セグメントの帰属度を算出する帰属度算出機能と、
前記帰属度に基づいて柱状物体の種類を選別する柱状物体種別認識機能と、を備えたことを特徴とする請求項16乃至請求項19のいずれかに記載の柱状物体抽出プログラム。
【請求項21】
前記立設物形状データのうち、「柱状物体上の点」に分類された形状構成点であって、前記第一固有ベクトルが略鉛直方向である形状構成点を支柱候補点とし、
前記支柱候補点から所定距離内にある形状構成点と、前記支柱候補点とを、まとめて支柱構成点とする支柱構成点抽出機能と、
前記立設物形状データのうち、前記支柱構成点以外の形状構成点で構成される連続成分を、パーツとして抽出するパーツ抽出機能と、
前記パーツを、前記形状分類に基づくパーツタイプに分類するパーツタイプ分類機能と、
前記立設物形状データの高さ、立設物形状データに含まれる前記パーツの数、及びパーツタイプに関する評価に基づいて、立設物形状データの帰属度を算出する帰属度算出機能と、
前記帰属度に基づいて柱状物体の種類を選別する柱状物体種別認識機能と、を備えたことを特徴とする請求項14又は請求項15記載の柱状物体抽出プログラム。
【請求項22】
所定のグリッドによって複数のメッシュを構成するとともに、前記帰属度を最も近いメッシュに配点する帰属度配点機能と、
所定数の前記メッシュで構成されるエリアを設定するエリア設定機能と、
前記エリアに基づいて、柱状物体の種類ごとに標準分布マップを作成する標準分布マップ作製機能と、
前記エリアに基づき、各柱状物体セグメント又は各立設物形状データに対して、周辺分布マップを作成する周辺分布マップ作製機能と、
さらに、前記標準分布マップ及び前記周辺分布マップに基づいて、当該柱状物体セグメント又は立設物形状データに対して、コンテクスト特徴量を算出するコンテクスト特徴量算出機能と、
前記コンテクスト特徴量に基づいて柱状物体の種類を選別する柱状物体種別認識機能と、を備えたことを特徴とする請求項20又は請求項21記載の柱状物体抽出プログラム。
【請求項23】
地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、該立設物のうちその形状が柱状である柱状物体を抽出する柱状物体抽出装置において、
前記所定空間を計測して前記計測点群を取得する計測手段と、
前記計測手段によって取得された前記計測点群を記憶する記憶手段と、
前記計測点群を基に、立設物のうち前記柱状物体を抽出する演算処理手段と、を備え、
さらに前記演算処理手段は、セグメンテーション機能と、細線化機能と、主成分分析機能と、形状分類機能と、柱状物体判定機能と、を備え、
前記セグメンテーション機能は、前記計測点群から、それぞれ独立した領域ごとにセグメントデータを作成するものであって、任意計測点から近い順に所定数k個の前記近傍計測点を選出し、この近傍計測点と前記任意計測点との間でエッジを発生させることでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとするものであり、
前記細線化機能は、それぞれの前記セグメントデータに対して、立設物の形状特徴を明確にする細線化処理を行って立設物形状データを作成するものであり、
前記主成分分析機能は、それぞれの前記形状構成点に対して、主成分分析のための演算処理を行って固有値及び固有ベクトルを求めるものであり、
前記形状分類機能は、それぞれの前記形状構成点に対して、前記固有値を基に算出される特徴量に応じた形状分類を付与するものであり、
前記柱状物体判定機能は、前記形状構成点の前記特徴量に基づいて、立設物の柱状判定処理を行うものであり、
前記細線化機能で行われる前記細線化処理は、前記任意計測点の位置を移動させるものであって、前記任意計測点における前記近傍計測点2点との挟角を算出し、この挟角と前記任意計測点と前記近傍計測点とに基づいて、移動後の任意計測点位置を算出するものである、ことを特徴とする柱状物体抽出装置。
【請求項1】
地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、該立設物のうちその形状が柱状である柱状物体を抽出する方法において、
前記計測点群から、それぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、
それぞれの前記セグメントデータに対して、立設物の形状特徴を明確にする細線化処理を行うことで立設物形状データを得る細線化工程と、
前記立設物形状データを構成する形状構成点に対して、それぞれ主成分分析を行って固有値及び固有ベクトルを求めるとともに、該固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、
前記形状構成点の前記形状分類に基づいて、立設物の柱状判定を行う柱状物体判定工程と、を備え、
前記セグメンテーション工程は、任意計測点とこの点に近い近傍計測点との間でエッジを生成し、その結果得られる一つの連続成分を一つのセグメントデータとして得るものであり、
前記細線化工程における前記細線化処理は、前記任意計測点の位置を移動させるものであって、前記任意計測点、前記近傍計測点、及び前記任意計測点における前記近傍計測点2点との挟角から求められる細線化強度に基づいて、移動後の任意計測点位置を求めるものである、ことを特徴とする柱状物体抽出方法。
【請求項2】
前記セグメンテーション工程は、前記任意計測点から近い順に所定数k個の前記近傍計測点を選出し、この近傍計測点と前記任意計測点との間でエッジを生成することでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとして得る、ことを特徴とする請求項1記載の柱状物体抽出方法。
【請求項3】
主成分分析によって得られる前記固有値は、値の大きなものから順に、第一固有値、第二固有値、第三固有値とされ、
主成分分析によって得られる前記固有ベクトルは、第一固有値に対応するものが第一固有ベクトル、第二固有値に対応するものが第二固有ベクトル、第三固有値に対応するものが第三固有ベクトルとされ、
前記特徴量は、前記第一固有値と第二固有値に基づいて算出される第一特徴量と、前記第二固有値と第三固有値に基づいて算出される第二特徴量と、前記第三固有値に基づいて算出される第三特徴量と、で構成され、
前記形状分類は、「柱状物体上の点」を含む2以上の分類で構成され、前記特徴量のうち前記第一特徴量が最大値を示す前記形状構成点には形状分類として「柱状物体上の点」が付与される、ことを特徴とする請求項1又は請求項2記載の柱状物体抽出方法。
【請求項4】
前記柱状物体判定工程における前記立設物の柱状判定は、前記立設物形状データを構成する形状構成点のうち「柱状物体上の点」に分類された形状構成点が占める割合、又は/及び「柱状物体上の点」に分類された形状構成点のうち前記第一固有ベクトルが鉛直又は鉛直に近い向きである形状構成点が占める割合に基づいて、該立設物形状データの柱状物体度を求め、この柱状物体度を評価することで立設物の柱状判定を行う、ことを特徴とする請求項3記載の柱状物体抽出方法。
【請求項5】
前記柱状物体判定工程は、隣接接続グラフ生成工程と、基本コンポーネント形成工程と、基本コンポーネント分類工程と、柱状物体セグメント作成工程と、を含み、
前記隣接接続グラフ生成工程は、前記各形状構成点の前記固有ベクトルに基づいて、各形状構成点と隣接関係にある隣接点を求めるとともに、該隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの隣接接続グラフとして得るものであり、
前記基本コンポーネント形成工程は、前記隣接接続グラフを構成する各形状構成点に対して、各形状構成点と同一の形状分類が付与された前記隣接点を求めるとともに、該隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの基本コンポーネントとして得るものであり、
前記基本コンポーネント分類工程は、前記基本コンポーネントに対して前記形状分類に応じたコンポーンネントを分類するものであって、形状分類が「柱状物体上の点」である基本コンポーネントは「支柱コンポーネント」に分類し、
前記柱状物体セグメント作成工程は、前記支柱コンポーネントを含む前記隣接接続グラフを抽出するとともに、該隣接接続グラフに含まれる1又は2以上の前記基本コンポーネントを結合して柱状物体セグメントを作成するものであり、
前記隣接点は、前記形状構成点から前記固有ベクトル方向に向けて拡張される空間範囲内において、前記形状構成点から最も近い形状構成点が選ばれ、
前記柱状物体セグメントに基づいて、立設物の柱状判定を行う、ことを特徴とする請求項3記載の柱状物体抽出方法。
【請求項6】
前記基本コンポーネント分類工程は、一つの隣接接続グラフ内に、その形状分類が「柱状物体上の点」である基本コンポーネントが2以上含まれる場合、形状分類が「柱状物体上の点」である基本コンポーネントのうち最小の標高値を具備するものを、「支柱コンポーネント」と分類する、ことを特徴とする請求項5記載の柱状物体抽出方法。
【請求項7】
前記第二特徴量が最大値を示す前記形状構成点には、前記形状分類として「平面上の点」が付与され、
前記基本コンポーネント分類工程は、形状分類が「平面上の点」である基本コンポーネントは「平面コンポーネント」に分類するとともに、平面コンポーネントを構成する形状構成点によって形成される面の法線方向に基づいて、略水平な平面コンポーネントを「地面コンポーネント」として抽出し、
前記柱状物体セグメント作成工程は、前記地面コンポーネントを除いたうえで、1又は2以上の前記基本コンポーネントを結合して前記柱状物体セグメントを作成する、ことを特徴とする請求項5又は請求項6記載の柱状物体抽出方法。
【請求項8】
前記基本コンポーネント分類工程は、その形状分類が「柱状物体上の点」の基本コンポーネントであって、基本コンポーネントを構成する形状構成点の前記第一固有ベクトルが略水平な基本コンポーネントを「接続物コンポーネント」として抽出し、
前記柱状物体セグメント作成工程は、前記接続物コンポーネントを除いたうえで、1又は2以上の前記基本コンポーネントを結合して柱状物体セグメントを作成する、ことを特徴とする請求項5乃至請求項7のいずれかに記載の柱状物体抽出方法。
【請求項9】
前記柱状物体セグメントを構成する基本コンポーネントのうち、支柱コンポーネント以外の基本コンポーネントであって、相互に連結された基本コンポーネントの組み合わせをパーツとして抽出し、
前記パーツを、前記形状分類に基づくパーツタイプに分類し、
前記柱状物体セグメントの高さ、柱状物体セグメントに含まれる前記パーツの数、及びパーツタイプに関する評価に基づいて、柱状物体セグメントの帰属度を求め、
前記帰属度に基づいて、柱状物体の種類を選別する、ことを特徴とする請求項5乃至請求項8のいずれかに記載の柱状物体抽出方法。
【請求項10】
前記立設物形状データのうち、「柱状物体上の点」に分類された形状構成点であって、前記第一固有ベクトルが略鉛直方向である形状構成点を支柱候補点とし、
前記支柱候補点から所定距離内にある形状構成点と、前記支柱候補点とを、まとめて支柱構成点とし、
前記立設物形状データのうち、前記支柱構成点以外の形状構成点で構成される連続成分を、パーツとして抽出し、
前記パーツを、前記形状分類に基づくパーツタイプに分類し、
前記立設物形状データの高さ、立設物形状データに含まれる前記パーツの数、及びパーツタイプに関する評価に基づいて、立設物形状データの帰属度を求め、
前記帰属度に基づいて、柱状物体の種類を選別する、ことを特徴とする請求項3又は請求項4記載の柱状物体抽出方法。
【請求項11】
所定のグリッドによって複数のメッシュを構成するとともに、前記帰属度を最も近いメッシュに配点し、
所定数の前記メッシュで構成されるエリアを設定し、
前記エリアに基づいて、柱状物体の種類ごとに標準分布マップを作成し、
前記エリアに基づき、各柱状物体セグメント又は各立設物形状データに対して、周辺分布マップを作成し、
さらに、前記標準分布マップ及び前記周辺分布マップに基づいて、当該柱状物体セグメント又は立設物形状データに対して、コンテクスト特徴量を算出し、
前記コンテクスト特徴量に基づいて、柱状物体の種類を選別する、ことを特徴とする請求項9又は請求項10記載の柱状物体抽出方法。
【請求項12】
地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、該立設物のうちその形状が柱状である柱状物体を抽出する機能をコンピュータに実行させる柱状物体抽出プログラムにおいて、
前記計測点群から、それぞれ独立した領域ごとにセグメントデータを作成するセグメンテーション機能と、
それぞれの前記セグメントデータに対して、立設物の形状特徴を明確にする細線化処理を行って立設物形状データを作成する細線化機能と、
前記立設物形状データを構成する形状構成点に対して、それぞれ主成分分析のための演算処理を行って固有値及び固有ベクトルを求める主成分分析機能と、
さらにそれぞれの前記形状構成点に対して、前記固有値を基に算出される特徴量に応じた形状分類を付与する形状分類機能と、
前記形状構成点の前記特徴量に基づいて、立設物の柱状判定処理を行う柱状物体判定機能と、を備え、
前記セグメンテーション機能は、任意計測点とこの点に近い近傍計測点との間でエッジを発生させ、その結果得られる一つの連続成分を一つのセグメントデータとするものであり、
前記細線化機能で行われる前記細線化処理は、前記任意計測点の位置を移動させるものであって、前記任意計測点における前記近傍計測点2点との挟角を算出し、この挟角と前記任意計測点と前記近傍計測点とに基づいて、移動後の任意計測点位置を算出するものである、ことを特徴とする柱状物体抽出プログラム。
【請求項13】
前記セグメンテーション機能は、前記任意計測点から近い順に所定数k個の前記近傍計測点を選出し、この近傍計測点と前記任意計測点との間でエッジを発生させることでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとするものである、ことを特徴とする請求項12記載の柱状物体抽出プログラム。
【請求項14】
主成分分析機能によって求められる前記固有値は、値の大きなものから順に、第一固有値、第二固有値、第三固有値であり、
主成分分析機能によって求められる前記固有ベクトルは、第一固有値に対応するものが第一固有ベクトル、第二固有値に対応するものが第二固有ベクトル、第三固有値に対応するものが第三固有ベクトルであり、
前記特徴量は、前記第一固有値と第二固有値に基づいて算出される第一特徴量と、前記第二固有値と第三固有値に基づいて算出される第二特徴量と、前記第三固有値に基づいて算出される第三特徴量と、で構成され、
前記形状分類は、「柱状物体上の点」を含む2以上の分類で構成され、前記特徴量のうち前記第一特徴量が最大値を示す前記形状構成点には形状分類として「柱状物体上の点」が付与される、ことを特徴とする請求項12又は請求項13記載の柱状物体抽出プログラム。
【請求項15】
前記柱状物体判定機能における柱状判定処理は、前記立設物形状データを構成する形状構成点のうち「柱状物体上の点」に分類された形状構成点が占める割合、又は/及び「柱状物体上の点」に分類された形状構成点のうち固有ベクトルが鉛直又は鉛直に近い向きである形状構成点が占める割合に基づいて、該立設物形状データの柱状物体度を算出し、この柱状物体度を評価することで立設物の柱状判定を行うものである、ことを特徴とする請求項14記載の柱状物体抽出プログラム。
【請求項16】
前記柱状物体判定機能は、隣接接続グラフ生成機能と、基本コンポーネント形成機能と、基本コンポーネント分類機能と、柱状物体セグメント作成機能と、を含み、
前記隣接接続グラフ生成機能は、前記各形状構成点の前記固有ベクトルに基づいて、各形状構成点と隣接関係にある隣接点を選出するとともに、該隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの隣接接続グラフとするものであり、
前記基本コンポーネント形成機能は、前記隣接接続グラフを構成する各形状構成点に対して、各形状構成点と同一の形状分類が付与された前記隣接点を選出するとともに、該隣接点と形状構成点との間でエッジを生成し、その結果得られる一つの連続成分を一つの基本コンポーネントとするものであり、
前記基本コンポーネント分類機能は、前記基本コンポーネントに対して前記形状分類に応じたコンポーンネント分類を付与するものであって、形状分類が「柱状物体上の点」である基本コンポーネントにはコンポーンネント分類として「支柱コンポーネント」を付与し、
前記柱状物体セグメント作成機能は、前記支柱コンポーネントを含む前記隣接接続グラフを抽出するとともに、該隣接接続グラフに含まれる1又は2以上の前記基本コンポーネントを結合して柱状物体セグメントを作成するものであり、
前記隣接点は、前記形状構成点から前記固有ベクトル方向に向けて拡張される空間範囲内において、前記形状構成点から最も近い形状構成点が選ばれ、
前記柱状物体セグメントに基づいて、立設物の柱状判定を行う、ことを特徴とする請求項14記載の柱状物体抽出プログラム。
【請求項17】
前記基本コンポーネント分類機能は、一つの隣接接続グラフ内に、その形状分類が「柱状物体上の点」である基本コンポーネントが2以上含まれる場合、形状分類が「柱状物体上の点」である基本コンポーネントのうち最小の標高値を具備するものに、コンポーンネント分類として「支柱コンポーネント」を付与する、ことを特徴とする請求項16記載の柱状物体抽出プログラム。
【請求項18】
前記第二特徴量が最大値を示す前記形状構成点には、前記形状分類として「平面上の点」を付与し、
前記基本コンポーネント分類機能は、形状分類が「平面上の点」である基本コンポーネントには、コンポーンネント分類として「平面コンポーネント」を付与するとともに、平面コンポーネントを構成する形状構成点によって形成される面の法線方向に基づいて、略水平な平面コンポーネントを「地面コンポーネント」として抽出し、
前記柱状物体セグメント作成機能は、前記地面コンポーネントを除いたうえで、1又は2以上の前記基本コンポーネントを結合して前記柱状物体セグメントを作成する、ことを特徴とする請求項16又は請求項17記載の柱状物体抽出プログラム。
【請求項19】
前記基本コンポーネント分類機能は、その形状分類が「柱状物体上の点」の基本コンポーネントであって、基本コンポーネントを構成する形状構成点の前記第一固有ベクトルが略水平な基本コンポーネントを「接続物コンポーネント」として抽出し、
前記柱状物体セグメント作成機能は、前記接続物コンポーネントを除いたうえで、1又は2以上の前記基本コンポーネントを結合して柱状物体セグメントを作成する、ことを特徴とする請求項16乃至請求項18のいずれかに記載の柱状物体抽出プログラム。
【請求項20】
前記柱状物体セグメントを構成する基本コンポーネントのうち、支柱コンポーネント以外の基本コンポーネントであって、相互に連結された基本コンポーネントの組み合わせをパーツとして抽出するパーツ抽出機能と、
前記パーツを、前記形状分類に基づくパーツタイプに分類するパーツタイプ分類機能と、
前記柱状物体セグメントの高さ、柱状物体セグメントに含まれる前記パーツの数、及びパーツタイプに関する評価に基づいて、柱状物体セグメントの帰属度を算出する帰属度算出機能と、
前記帰属度に基づいて柱状物体の種類を選別する柱状物体種別認識機能と、を備えたことを特徴とする請求項16乃至請求項19のいずれかに記載の柱状物体抽出プログラム。
【請求項21】
前記立設物形状データのうち、「柱状物体上の点」に分類された形状構成点であって、前記第一固有ベクトルが略鉛直方向である形状構成点を支柱候補点とし、
前記支柱候補点から所定距離内にある形状構成点と、前記支柱候補点とを、まとめて支柱構成点とする支柱構成点抽出機能と、
前記立設物形状データのうち、前記支柱構成点以外の形状構成点で構成される連続成分を、パーツとして抽出するパーツ抽出機能と、
前記パーツを、前記形状分類に基づくパーツタイプに分類するパーツタイプ分類機能と、
前記立設物形状データの高さ、立設物形状データに含まれる前記パーツの数、及びパーツタイプに関する評価に基づいて、立設物形状データの帰属度を算出する帰属度算出機能と、
前記帰属度に基づいて柱状物体の種類を選別する柱状物体種別認識機能と、を備えたことを特徴とする請求項14又は請求項15記載の柱状物体抽出プログラム。
【請求項22】
所定のグリッドによって複数のメッシュを構成するとともに、前記帰属度を最も近いメッシュに配点する帰属度配点機能と、
所定数の前記メッシュで構成されるエリアを設定するエリア設定機能と、
前記エリアに基づいて、柱状物体の種類ごとに標準分布マップを作成する標準分布マップ作製機能と、
前記エリアに基づき、各柱状物体セグメント又は各立設物形状データに対して、周辺分布マップを作成する周辺分布マップ作製機能と、
さらに、前記標準分布マップ及び前記周辺分布マップに基づいて、当該柱状物体セグメント又は立設物形状データに対して、コンテクスト特徴量を算出するコンテクスト特徴量算出機能と、
前記コンテクスト特徴量に基づいて柱状物体の種類を選別する柱状物体種別認識機能と、を備えたことを特徴とする請求項20又は請求項21記載の柱状物体抽出プログラム。
【請求項23】
地面上に立設された複数の立設物を含む所定空間の計測点の集合である計測点群から、該立設物のうちその形状が柱状である柱状物体を抽出する柱状物体抽出装置において、
前記所定空間を計測して前記計測点群を取得する計測手段と、
前記計測手段によって取得された前記計測点群を記憶する記憶手段と、
前記計測点群を基に、立設物のうち前記柱状物体を抽出する演算処理手段と、を備え、
さらに前記演算処理手段は、セグメンテーション機能と、細線化機能と、主成分分析機能と、形状分類機能と、柱状物体判定機能と、を備え、
前記セグメンテーション機能は、前記計測点群から、それぞれ独立した領域ごとにセグメントデータを作成するものであって、任意計測点から近い順に所定数k個の前記近傍計測点を選出し、この近傍計測点と前記任意計測点との間でエッジを発生させることでk近傍接続グラフを作成し、このk近傍接続グラフから得られる一つの連続成分を一つのセグメントデータとするものであり、
前記細線化機能は、それぞれの前記セグメントデータに対して、立設物の形状特徴を明確にする細線化処理を行って立設物形状データを作成するものであり、
前記主成分分析機能は、それぞれの前記形状構成点に対して、主成分分析のための演算処理を行って固有値及び固有ベクトルを求めるものであり、
前記形状分類機能は、それぞれの前記形状構成点に対して、前記固有値を基に算出される特徴量に応じた形状分類を付与するものであり、
前記柱状物体判定機能は、前記形状構成点の前記特徴量に基づいて、立設物の柱状判定処理を行うものであり、
前記細線化機能で行われる前記細線化処理は、前記任意計測点の位置を移動させるものであって、前記任意計測点における前記近傍計測点2点との挟角を算出し、この挟角と前記任意計測点と前記近傍計測点とに基づいて、移動後の任意計測点位置を算出するものである、ことを特徴とする柱状物体抽出装置。
【図1】


【図2】
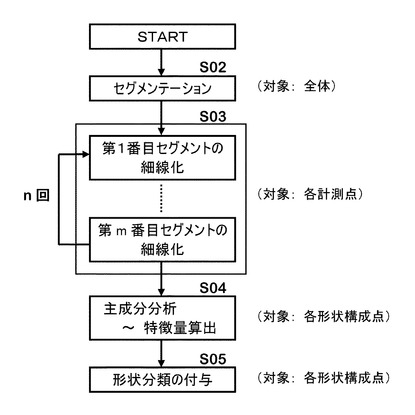
【図3】
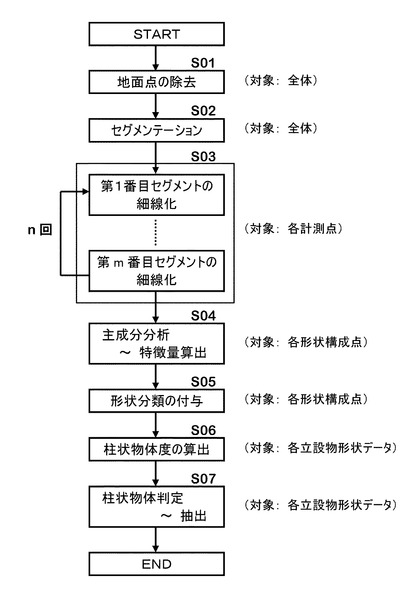
【図4】

【図5】

【図6】
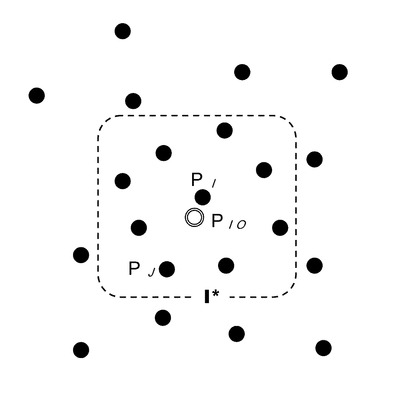
【図7】

【図8】

【図9】
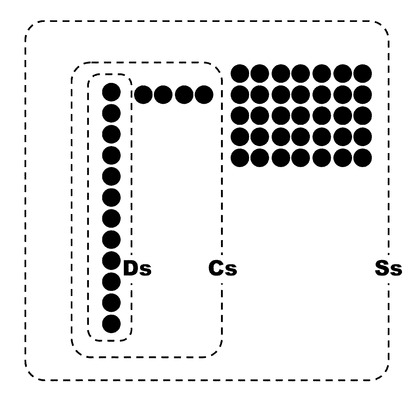
【図10】

【図11】

【図12】

【図13】

【図14】

【図15】
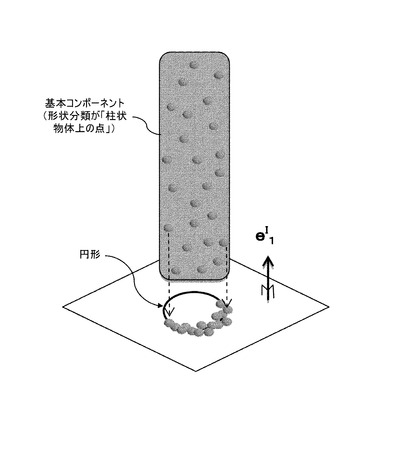
【図16】
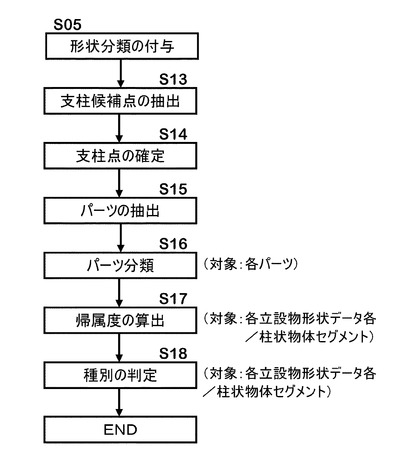
【図17】

【図18】
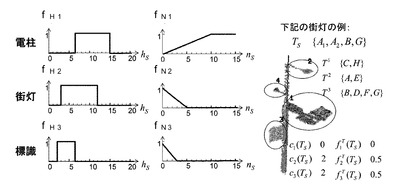
【図19】
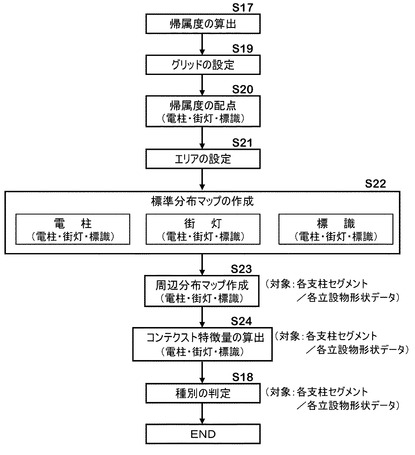
【図20】
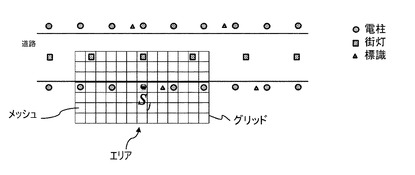
【図21】

【図22】
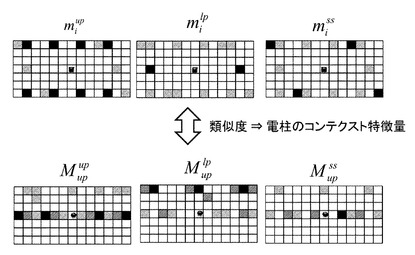
【図23】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2013−64733(P2013−64733A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2012−186830(P2012−186830)
【出願日】平成24年8月27日(2012.8.27)
【出願人】(504173471)国立大学法人北海道大学 (971)
【出願人】(390023249)国際航業株式会社 (55)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成24年8月27日(2012.8.27)
【出願人】(504173471)国立大学法人北海道大学 (971)
【出願人】(390023249)国際航業株式会社 (55)
【Fターム(参考)】
[ Back to top ]