
案内システム
【課題】 案内地点付近の目印を用いた案内を行う。
【解決手段】 目印となり得る地物の特徴を特徴要素で構造化した案内データを用意する。現在位置が案内地点の付近に来ると、案内システムは、案内地点周辺の所定の範囲から目印候補となる地物を選択する。そして、目印候補について、特徴要素を一つ用いた場合、2つ組み合わせた場合など多様な組合せで案内地点を一義的に特定可能な情報を提示できるか否かを判断する。更に、それぞれの特徴要素に設定された評価値、組み合わせる特徴要素の数、案内地点から目印候補までの距離、案内に用いる目印候補の軒数に応じた係数を乗じて、それぞれの案内ケースに対して、案内としての有用性を表す評価値を求める。
評価値が高いケースを選択して案内に用いることにより、特徴要素の組合せによって案内地点を一義的に特定可能な情報を過不足なく提示した案内を実現できる。
【解決手段】 目印となり得る地物の特徴を特徴要素で構造化した案内データを用意する。現在位置が案内地点の付近に来ると、案内システムは、案内地点周辺の所定の範囲から目印候補となる地物を選択する。そして、目印候補について、特徴要素を一つ用いた場合、2つ組み合わせた場合など多様な組合せで案内地点を一義的に特定可能な情報を提示できるか否かを判断する。更に、それぞれの特徴要素に設定された評価値、組み合わせる特徴要素の数、案内地点から目印候補までの距離、案内に用いる目印候補の軒数に応じた係数を乗じて、それぞれの案内ケースに対して、案内としての有用性を表す評価値を求める。
評価値が高いケースを選択して案内に用いることにより、特徴要素の組合せによって案内地点を一義的に特定可能な情報を過不足なく提示した案内を実現できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、指定された目的地を案内する案内システムに関する。
【背景技術】
【0002】
道路をリンク、ノードで表したネットワークデータを用いて、指定された出発地から目的地までの経路を探索し、案内するナビゲーションシステムが普及している。ナビゲーションシステムでは、目的地の近くまで到達したユーザが、建物等を視認して、そこが目的地であることを確信できる案内を実現することが好ましい。かかる案内を実現する一つの方法として、ユーザに対して、「赤い屋根の家です」のように、目的地となる建物等の特徴を示すことが考えられる。
【0003】
特許文献1は、交差点の案内目印について、目印と交差点の距離、発見距離、固有度などで評価した上で、案内に用いる技術を開示している。
特許文献2は、ランドマークを用いて案内を行う技術を開示しており、昼夜共に視認性が良好などランドマークに付された属性を参照しながら、昼間の走行中か夜間の走行中かといった走行時の条件に応じて案内に使用するランドマークを選択する。
特許文献3は、学校、郵便局、ガソリンスタンドなど交差点付近にある目印を選択し、この目印を提示して案内を行う技術を開示している。
特許文献4は、経路の案内の他、目的地に着いた時に、「右側2階建て、目的地に着きました」のように、目的地の建物自体の特徴を示す案内を行う技術を開示している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−63571号公報
【特許文献2】特開平7−98800号公報
【特許文献3】特開平9−292260号公報
【特許文献4】特開平10−9886号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術では、ランドマークなど、運転者が容易に理解可能な目印を案内に利用していた。しかし、ユーザが選択する目的地は、必ずしもこのように案内に適した目印が近くに存在する場所ばかりとは限らない。また、ガソリンスタンドなど、案内に用いる目印によっては、目的地に到着するまでに、目印に該当する地物がいくつも見い出され、かえってユーザを混乱させるおそれもあった。
特許文献4は、特別なランドマークだけでなく、目的地の建物自体の特徴をも案内する技術を開示してはいる。しかし、例えば、「右側2階建て」hいる。hにドうという特徴に該当する建物は多数存在するため、有用な案内ができるとは言えなかった。案内された建物を特定できるようにするためには、「赤い屋根で白い壁の…」というように多くの特徴を述べればよいが、あまりに多くの特徴を述べられても、その特徴に該当する建物を探し出すのは非常に困難である。
【0006】
このように、ユーザが走行する場所によっては、ありふれた民家やビルなど、特別なランドマークとまで言えない地物を目印に用いて案内に用いる必要性が高いにもかかわらず、従来は、これらの目印を一義的に判別できる的確な情報を与えることはできていなかった。かかる課題は、経路の目的地を案内する場合だけでなく、右左折する交差点など経路途中の種々の地点を案内する際に共通の課題であった。
本発明は、かかる課題に鑑み、経路上の所定の案内地点を案内する際に、ユーザが、案内された目印を一義的に判別できる情報を過不足なく提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、案内システムとして構成することができる。案内システムは、ユーザが目的地や途中のポイントを指定した場合、指定された地点を現地で判別できるように目印等を案内するものである。また、経路探索と組み合わせて、経路途中で右左折するポイントや目的地など、ユーザに案内すべき点(以下、案内地点という)を自動的に設定した上で、案内を行うシステムとしてもよい。
【0008】
本発明の案内システムは、地図データベース記録部、現在位置取得部、案内情報設定部、案内部を備える。
地図データベース記憶部は、経路上の所定の案内地点を案内する際の目印となり得る案内目印の位置、およびその特徴を表すように構造化された特徴要素の組合せを記憶する案内データを格納している。例えば、建物を案内目印とする場合、屋根の色、壁の色、階数などの特徴要素に分けて、各建物の特徴を表すのである。案内地点は、先に説明した通り、ユーザが指定してもよいし、案内システムが自動的に設定してもよい。また、目的地自体を案内地点に含めることもできる。
現在位置取得部は、現在位置に関する位置情報を取得する。例えば、GPS(Global Positioning System)を用いることができる。
【0009】
案内情報設定部は、まず、案内地点と現在位置に基づいて案内目印を抽出するための所定の範囲(以下、「目印探索範囲」という)を設定し、この範囲内の案内目印を抽出する。案内目印は、案内データを参照して抽出することができる。目印探索範囲には、現在位置の前方から案内地点までの範囲を含めることが好ましいが、案内地点のさらに前方の範囲を含めても構わない。また、必ずしも現在位置から案内目印が目視できる範囲に限定する必要はない。例えば、交差点を右左折した先に案内目印が存在する場合、「交差点を曲がった後に見える○○」のように、案内目印を右左折前に案内しておくことも有用だからである。
【0010】
案内情報設定部は、案内データを参照して、構造化された特徴要素を比較して、案内地点を一義的に特定可能な案内目印、および一義的に特定するために必要となる1または2以上の特徴要素を設定する。つまり、どの案内目印を用い、どの特徴要素を提示すれば、ユーザが現地で案内目印を一義的に判別できるかを判断するのである。例えば、赤い屋根で白い壁の建物を案内目印として用いる場合、周囲に赤い屋根の建物がなければ、「赤い屋根」という特徴要素だけを用いることができる。これに対し、周囲に赤い屋根の建物がある場合には、「赤い屋根で白い壁」というように、2つの特徴要素を組み合わせて用いることができる。このように、案内目印を一義的に判別できるように、特徴要素またはその組合せを決定するのである。
【0011】
そして、案内部は、案内情報設定部の設定に従い、案内目印についての特徴要素、および案内目印と案内地点との位置関係を提示することで、案内地点の案内を行う。情報の提示は、ディスプレイ等に表示してもよいし、音声案内を行ってもよい。
【0012】
本発明の案内システムによれば、案内データ内に案内目印の特徴要素を構造化して記憶しており、現地で一義的に案内目印を判別できるように、用いるべき特徴要素を判断する。こうすることによって、本発明の案内システムは、ユーザに過不足ない情報を提示して案内目印の案内を行うことが可能となる。
【0013】
案内システムは、経路探索と組み合わせてもよい。
経路探索を実現するために、地図データベース記憶部には、さらに、道路をノード、リンクで表したネットワークデータと、道路を含む地物を描画するための地物データとを格納する。ネットワークデータは、通行規制も踏まえて自動車の経路探索に使用可能な主ネットワークと、経路探索に使用可能ではあるが通行規制の整備が完全とは言えない準ネットワークなどを混在して用意してもよい。また地物データは、先に説明した案内データと統合してもよい。
そして、出発地および目的地の指定を入力する。出発地は、ユーザの現在地を用いるようにしてもよい。目的地は、地物データに含まれる特定の建物等を指定してもよいし、地図上で座標値を指定してもよい。
上述のネットワークを用いて出発地から目的地までの経路探索を行うものとしてもよいが、更に、以下に示す到着地点取得部および経路探索部を設けて経路探索を行うようにしてもよい。
到着地点取得部は、ネットワークデータおよび地物データを参照して、自動車が通行可能な道路としてネットワークデータが整備された道路上の点であって、目的地に対応する地物からいずれかの道路を通行して到着できる点である到着地点を取得する。
到着地点は、地物データの一部として、建物等の地物ごとに設定されているものとしてもよい。この場合、到着地点取得部は、目的地として指定された地物に対応する到着地点のデータを読み込めば済む。目的地が座標値で指定された場合には、到着地点取得部は、指定された座標が対応する地物を特定し、その地物に対応する到着地点のデータを読み込めばよい。
これに対し、到着地点を予め用意しない構成とすることもできる。この場合には、到着地点取得部は、目的地を起点する経路探索によって、到着地点を見いだすことになる。この場合の経路探索には、通行規制の整備が完全とは言えない準ネットワークや、ネットワークが一切整備されてはいない道路も用いることができる。ネットワークが整備されていない道路については、地物データに含まれる道路のポリゴンデータの連結具合をネットワークデータとして扱うことにより経路探索の対象とすることができる。
経路探索部は、ネットワークデータを参照して、出発地から到着地点までの経路探索を行う。
経路探索と組み合わせた構成では、案内部は、案内とともに、位置情報に応じて、経路探索の結果を提示して案内を行う。
【0014】
経路探索と組み合わせて適用すれば、ユーザが進行する経路を踏まえて、「交差点を曲がった先」などの案内も可能となり、有用性が増大する。
また、上記態様では、主ネットワークから外れた地物を目的地とする場合でも、到着地点を用いることで経路探索、経路案内することができる点に特徴がある。主ネットワークから外れた地点への経路案内では、いわゆるランドマークと呼べる目印が少なく、ありふれた建物等しか目印になるものがないことが多い。従って、かかる経路探索を用いる場合には、特徴要素の組合せで案内目印の特定に過不足ない情報を与えるという本発明が、特に有用となるのである。
【0015】
経路探索部は、先に説明した通り、経路探索の結果を踏まえて、交差点を右左折する点など、案内地点を自動的に設定してもよい。こうすることにより、ユーザが案内地点を設定する手間が省ける他、経路を誤りやすい地点などで案内目印を用いた案内をすることが可能となり、わかりやすい経路案内を実現することができる。
【0016】
現在位置の取得には、所定の誤差が含まれるのが通常であるから、案内目印の抽出等には、こうした誤差範囲を考慮することが好ましい。現在位置の誤差は、現在位置取得部の構成に応じて決まる値である。必ずしも厳密な誤差を測定する必要はなく、概ねの誤差範囲として設定した値を用いてもよい。
例えば、案内目印を抽出する所定の範囲、即ち目印探索範囲は、現在位置取得部における誤差を考慮して得られる現在位置の最前方位置に基づいて設定してもよい。
案内目印は、ユーザの前方にあってこそ案内の役に立つ。このように最前方位置に基づいて設定しておけば、有用な案内目印を抽出することができる。
経路探索と組み合わせた態様では、ユーザの進行する経路がわかっているから、目印探索範囲は、上述の最前方位置よりも経路に沿って前方に設定すればよい。最前方位置を含めてもよいし、ユーザの進行速度に応じて最前方位置よりも更に前方に余裕をもたせて設定してもよい。
経路探索と組み合わせない態様では、上述の最前方位置と案内地点とを結ぶ線分を基準として目印探索範囲を設定することができる。例えば、この線分に所定の幅を持たせた範囲を目印探索範囲とすることができる。
【0017】
一方、現在位置の誤差は、案内目印の評価に考慮することもできる。
例えば、案内情報設定部は、現在位置取得部における誤差を考慮して得られる現在位置の最後方位置から案内地点に至るまでの範囲(以下、「目印評価範囲」という)を対象として、案内地点を一義的に特定可能か否かの判断を行うようにしてもよい。ユーザの前方に案内目印と同じ特徴を有する建物等が他に存在すると、案内目印が一義的に判別できず、案内地点も特定することができなくなる。取得された現在位置を基準として目印評価範囲を設定すると、誤差の影響によって実際の現在位置が取得された現在位置よりも後方である場合には、目印評価範囲に含まれない建物の中に案内目印と同じ特徴を有する建物が存在する可能性が生じる。これに対し、誤差も考慮した現在位置の最後方位置を基準として目印評価範囲を設定しておけば、案内目印と同じ特徴を有する建物等が実際のユーザの進行方向に存在する可能性を低くすることができるため、有用な案内を行うことが可能となる。
【0018】
本発明において案内目印の有用性の評価は、種々の方法をとることができる。例えば、案内データに特徴要素ごとに目印としての有用性を表す評価値を記憶させておいてもよい。案内情報設定部は、一義的に特定可能な案内目印が複数存在する場合には、評価値を用いた有用性の評価によって案内に使用する案内目印およびその特徴要素を設定することができる。
評価方法の一例として、案内目印に付された特徴要素のうち、現地で案内地点を一義的に特定可能な特徴要素を抽出し、抽出された特徴要素に付された評価値で評価する方法をとってもよい。案内地点を一義的に特定するために複数の特徴要素を組み合わせて使用する場合には、それぞれの特徴要素に付された評価値の最大値や、これらの評価値を用いた所定の演算式で評価を行うことができる。
ユーザが案内目印を理解しやすいという観点からは、提示する特徴要素は少ない方が好ましい。かかる点を考慮して、特徴要素を組み合わせて用いる場合には、単独で用いる場合よりも評価値を下げるようにしてもよい。
【0019】
案内情報設定部は、2以上の案内目印の組合せによって案内地点を一義的に特定可能である場合、その組合せも案内に使用するものとしてもよい。案内目印の組合せとは、「A建物の正面で、B建物の左側」のように、2以上の案内目印を用いる案内を言う。このような組合せも利用可能とすることにより、単一の案内目印で案内地点を特定し切れない場合でも、目的地の案内が可能となる。
【0020】
2以上の案内目印を組み合わせた案内は、単一の案内目印を用いる案内よりも理解しづらいことがある。
かかる観点から、案内情報設定部は、案内地点を一義的に特定するために必要となる案内目印の数の増加するほど各案内要素の特徴要素の有用性を低く評価した上で、案内に用いる案内目印、またはその組合せを設定するようにしてもよい。つまり、単一の案内目印を用いて「赤い屋根の家の正面」というように案内する場合と、2つの案内目印を用いて「赤い屋根の家の正面で、白い壁の家の左側」というように案内する場合では、後者の方が「赤い屋根」「白い壁」という特徴要素に付された評価値を下げるのである。こうすることにより、使用される案内目印が少ない案内方法を優先することができ、ユーザにとって理解しやすい案内を実現することができる。
【0021】
本発明は、その他、コンピュータを用いた経路案内方法として構成してもよいし、かかる経路案内をコンピュータに実行させるためのコンピュータプログラムとして構成してもよい。また、かかるコンピュータプログラムを記録したコンピュータが読み取り可能な記録媒体として構成してもよい。記録媒体としては、フレキシブルディスクやCD−ROM、光磁気ディスク、ICカード、ROMカートリッジ、パンチカード、バーコードなどの符号が印刷された印刷物、コンピュータの内部記憶装置(RAMやROMなどのメモリ)および外部記憶装置等、コンピュータが読取り可能な種々の媒体を利用できる。
【図面の簡単な説明】
【0022】
【図1】案内システムの構成を示す説明図である。
【図2】地図データベースの構造を示す説明図である。
【図3】到着地点の設定について示す説明図である。
【図4】案内データの構造を示す説明図である。
【図5】案内処理のフローチャートである。
【図6】目印探索範囲および目印評価範囲の設定方法を示す説明図である。
【図7】目印案内処理のフローチャートである。
【図8】目印の評価方法を示す説明図である。
【図9】目印候補抽出処理のフローチャートである。
【発明を実施するための形態】
【0023】
本発明の実施例について以下の順序で説明する。
A.システム構成:
B.データ構造:
B1.ネットワークデータ:
B2.文字データ:
B3.地物データ:
B4.到着地点の設定:
B5.案内データ:
C.案内処理:
D.目印案内処理:
D1.目印探索範囲等の設定:
D2.目印案内処理の内容:
D3.目印の評価:
D4.目印候補抽出処理:
【実施例1】
【0024】
A.システム構成:
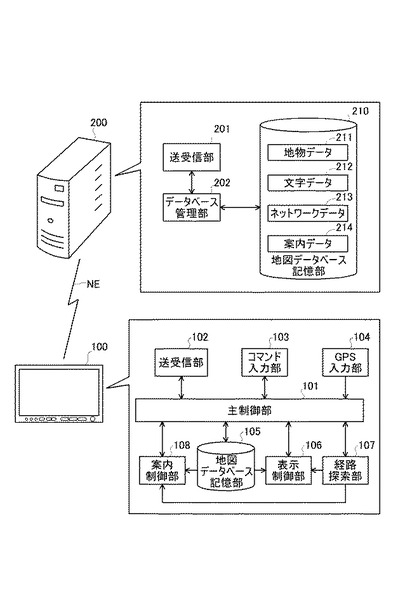
図1は、案内システムの構成を示す説明図である。案内システムは、ナビゲーション装置100として構成される。本実施例では、ナビゲーション装置100は、地図データ等を提供するサーバ200とネットワークNEで接続されており、サーバ200から地図データベースの更新を受けられるものとした。ナビゲーション装置100は、スタンドアロンで稼働する構成としてもよいし、その機能の一部をサーバ200等で実行する構成としてもよい。
【0025】
サーバ200は、地図データベース記憶部210、送受信部201、およびデータベース管理部202を備えている。送受信部201、データベース管理部202は、ハードウェア的に構成してもよいが、本実施例では、これらの機能を実現するコンピュータプログラムをインストールすることによって、ソフトウェア的に構成するものとした。
【0026】
送受信部201は、ナビゲーション装置100とネットワークNEを介した通信を行う。本実施例では、地図データベース記憶部210に格納されたデータや、その提供を求めるためのコマンド等が通信される。
データベース管理部202は、ナビゲーション装置100から要求された地図情報を、地図データベース記憶部210から読み出す。地図データベース記憶部210には、地物データ211、文字データ212、ネットワークデータ213、および案内データ214が格納されている。
地物データ211は、道路や建物など地図に描画すべき地物のポリゴンデータである。文字データ212は、地図上に表示すべき文字情報である。例えば、建物の名称や地名などの文字情報が含まれる。ネットワークデータ213は、道路をノード、リンクのつながりで表したデータである。案内データ214は、経路案内の際にユーザに案内目印を案内するために用いられるデータであり、案内目印の特徴を構造化して表したデータである。これらのデータ構造については後述する。
案内データ214と地物データ211は統合することも可能であるが、本実施例では、個別に設けるものとした。
【0027】
ナビゲーション装置100には、主制御部101の下で稼働する種々の機能ブロックが構成されている。本実施例では、主制御部101および各機能ブロックは、それぞれの機能を実現するソフトウェアをインストールすることによって構成したが、その一部または全部をハードウェア的に構成してもよい。
送受信部102は、サーバ200とのネットワークNEを介した通信を行う。本実施例では、地図データベースおよびその提供を受けるためのコマンドの送受信が主として行われる。
コマンド入力部103は、ナビゲーション装置100に設けられたボタン、レバー、タッチパネル等の操作を通じて、ユーザからの指示を入力する。本実施例における指示としては、経路探索の出発地、目的地の指定などが挙げられる。
GPS入力部104は、GPS(Global Positioning System)を用いて位置情報を入力する。
地図データベース記憶部105は、サーバ200から提供された地図データベース記憶部210に記憶されている地図データベースを格納する。本実施例では、サーバ200が備える地図データベース記憶部210に記憶されている地図データベースの全体をナビゲーション装置100内の地図データベース記憶部105にも格納するものとしたが、経路探索や地図表示に必要となる部分のみを、その都度、サーバ200から取得するものとしてもよい。
経路探索部107は、地図データベースを参照して、経路探索を行う。
表示制御部106は、地図データベース記憶部105を用いてナビゲーション装置100のディスプレイに地図および探索された経路を表示する。
案内制御部108は、現地でユーザが目的地を判断できるよう案内目印を用いた案内を実現する。
【0028】
B.データ構造:
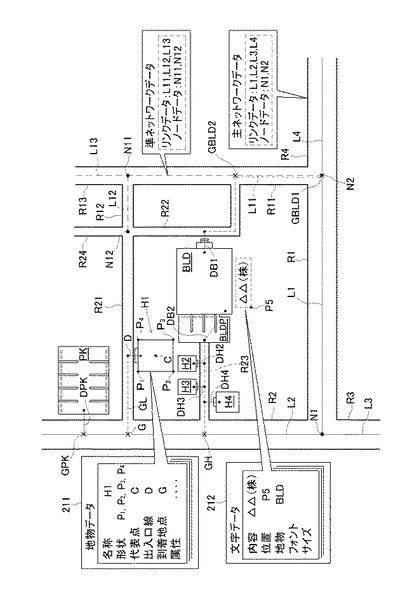
図2は、地図データベースの構造を示す説明図である。地物データ、文字データ、ネットワークデータに格納される情報の概要を示した。
【0029】
B1.ネットワークデータ:
ネットワークデータとは、道路をリンク、ノードで表したデータである。本実施例では、ネットワークデータとして主ネットワークデータと、準ネットワークデータの2種類が用意されている。図中に実線で示したリンクL1〜L4およびノードN1、N2が主ネットワークデータであり、破線で示したリンクL11〜L13およびノードN11、N12が準ネットワークデータである。
主ネットワークデータおよび準ネットワークデータともに、それぞれに属するリンクデータおよびノードデータを格納している。リンクデータは、それぞれのリンクを形成する点列の座標、国道・県道等の種別、車線数その他の属性情報や通行規制情報などを記録している。ノードデータは、座標値、通行規制などを記録している。
ただし、主ネットワークデータは、現地調査によって通行規制が十分に整備されたデータであり、車両の経路探索に支障なく用いることができるデータとなっている。これに対し、準ネットワークデータは、通行規制の整備が十分とは言えないデータであり、車両の経路探索では、使用しない方が好ましいデータである。本実施例でも、経路探索は原則として主ネットワークデータを用いて行うものとしている。
【0030】
B2.文字データ:
文字データ212は、地物の名称や地名などを表示する文字を規定するデータである。図中には、建物BLDの名称を表示するためのデータ例を示した。文字データは、内容、位置、地物、フォント、サイズなどの情報を格納する。
内容は、表示すべき文字列であり、図中の例では、「△△(株)」という会社名称である。
位置は、文字を表示する位置である。本実施例では、文字列の左下の点P5を基準点として、この座標値を指定するものとした。
地物は、文字が関連づけられる地物データのポリゴン名称である。
フォント、サイズは、表示する際のフォントおよびサイズの指定である。
この他、色、太字など、種々の属性を指定可能としてもよい。
【0031】
B3.地物データ:
地物データ211について、建物H1を例にとって構造を示す。地物データ211は、建物、道路等の地物を描画するためのポリゴンデータであり、名称、形状、代表点、出入口線、到着地点、属性などを格納している。
名称は、地物の名称である。ポリゴンに固有のIDを用いてもよい。
形状は、地物のポリゴンの頂点を示す座標の列である。図の例では、建物H1のポリゴンの頂点P1、P2、P3、P4の各座標が格納されている。
代表点は、地物の位置を表す地点Cの座標である。代表点は、地物の図心を用いることが多いが、任意に設定可能である。
出入口線は、地物と道路とを関連づけるための情報である。建物H1の場合、玄関から道路に出るための線分Dが出入口線として登録される。具体的には、線分Dの両端の座標が登録されることになる。出入口線は、線分Dのうち、道路上の端点のみを登録するものとしてもよい。また、出入口線は、建物や駐車場など、出入りを伴う地物に設定されるものであり、地物の全てに設定する必要はない。図の例では、建物BLDに対して正面の出入口線DB1および駐車場BLDP側の出入口線DB2、建物H2〜H4に対してそれぞれ出入口線DH2〜DH4、駐車場PKに対して出入口線DPKが設定されている。
【0032】
到着地点Gは、地物の出入口線の道路上の端点から、いずれかの道路を経てたどりつけるネットワーク上の点である。建物H1の場合、図中に点線で示す通り、出入口線Dが関連づけられている道路R21を経て、リンクL2に至ることができるため、リンクL2上に到着地点Gが設定されている。出入口線Dから道路R21を図中右方向にたどり、ノードN11で右折してノードN2に至る経路をとり、ノードN2を到着地点とすることもできる。本実施例では、建物H1からノードN2に至る道のりよりも、到着地点Gに至る道のりの方が短いから、このように設定した。到着地点は、一つに限定する必要はないから、ノードN2も到着地点に設定してもよい。
図の例では、建物H2〜H4に対する到着地点は点GHと設定されている。建物BLDに対しては、点GHおよび点GBLD2と設定されている。到着地点は、出入口線と同様、駐車場にも設定でき、図の例では、駐車場PKに対して到着地点GPKが設定されている。駐車場PKは、リンクL2に面しているため、出入口線DPKの端点と到着地点GPKが一致した状態となっている。
【0033】
B4.到着地点の設定:
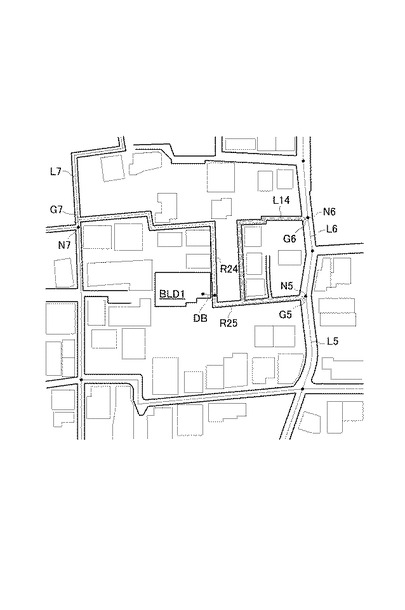
図3は、到着地点の設定について示す説明図である。建物BLD1の出入口線DBを対象とする到着地点について示した。
建物BLD1の周辺の主ネットワークデータとしては、リンクL7、ノードN7およびリンクL5、L6およびノードN5、N6が存在する。準ネットワークデータとしては、破線で示したリンクL14が存在する。
建物BLD1の出入口線DBからいずれかの道路を経て主ネットワークにたどりつく経路としては、図中に点線で示した3通りがあげられる。道路R24を経てリンクL7にたどりつく経路、道路R25を経てたリンクL6およびリンクL5にそれぞれたどりつく経路である。これらの各経路がリンクL7、L6、L5にたどりつく点が到着地点G7、G6、G5となる。
【0034】
これらの到着地点は、経路探索によって求めることができる。本実施例では、それぞれの地物は、出入口線によって、いずれかの道路に関連づけられているから、出入口点、つまり出入口線の道路上の端点を始点とする経路探索によって到着地点を求めればよい。
この経路探索は、主ネットワークデータ、準ネットワークデータおよび道路のポリゴンの全てを用いてもよい。道路のポリゴンは、リンク、ノードで構成されている訳ではないが、隣接するポリゴンを指定するデータは持っているから、ポリゴン同士のつながり関係は規定されており、リンク、ノードと同様に、経路探索に使用することが可能である。出入口点を起点とする経路探索の結果、主ネットワークデータにたどり着いた点を到着地点とすればよい。
【0035】
図の例のように、到着地点がG7、G6、G5の3点見いだされる場合、これらの3点を建物BLD1の到着地点として用いてもよいし、例えば、地物からの道のりが最短の地点、地物からの距離が最短の地点、地物から到着地点までの経路と準ネットワークデータとの重複部分が多い点、地物から出発点に向かう方角に近い点などの基準で選択してもよい。
図の例においては、地物からの道のりや距離を基準として選べば、建物BLD1に最も近い点G5が到着地点となる。準ネットワークデータとの重複部分を基準として選べば、点G6が到着地点となる。出発地が図の左端方向にある場合には、出発地の方角を基準として選べば、点G7が到着地点となる。
【0036】
本実施例では、上述の手順で、到着地点を設定し、地物データ211に予め設定しておくものとした。到着地点は、予め設定しておくのではなく、経路探索などの処理の過程で求めるものとしてもよい。
【0037】
B5.案内データ:
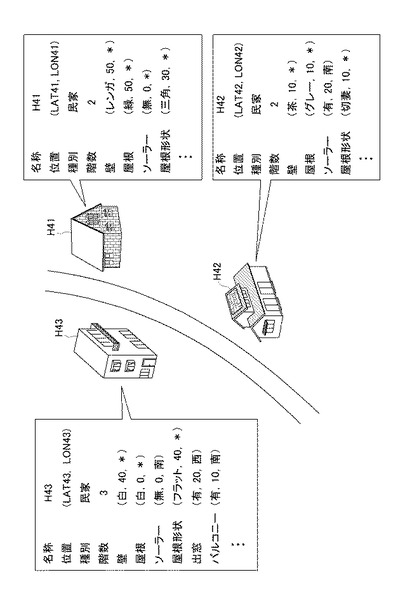
図4は、案内データの構造を示す説明図である。案内データは、経路案内の際に目的地をユーザが現地で判別できるよう案内目印を提供するために用いられるデータである。案内データでは、案内目印となり得る建物等の地物について、その特徴を複数の特徴要素によって構造化して記憶している。案内データは、地物データに含まれる全ての地物に対して用意する必要はなく、構造化して特徴を記述し得る地物についてのみ用意すれば足りる。かかる観点から、本実施例では、案内データは地物データとは個別のデータとしたが、地物を対象としている以上、地物データの属性の一部に特徴要素を組み込むことによって統合データとして構築することも可能である。
【0038】
図中には、建物H41〜H43の案内データを例示した。案内データは、それぞれ名称、位置、種別、階数、壁、屋根、ソーラー、屋根形状などの情報を記憶している。建物H41を例にとってその内容を説明する。
名称は、建物に付された名称であり、地物データと対応づけるインデックスである。
位置は、建物H41の位置座標(緯度、経度)である。
種別は、建物H41の種別である。この例では、「民家」となっているが、「洋風民家」のように更に細分化した種別としてもよい。
階数は、建物H41が2階建てであることを示している。「総2階」のように建物の外観構造をより詳細に表す内容としてもよい。
壁は、建物H41の壁の色、構造を表している。この例では、(レンガ、50、*)という組合せで記述した。これは、レンガ色またはレンガ造りであること、その評価値が50ポイントであること、そして「*」は特徴を視認できる向きに制限がないことを表している。評価値とは、その特徴要素を案内に用いた場合の有効性を表す指標であり、特徴要素がどれだけ目立つかを表す指標と言うこともできる。評価値は、このような心理的な影響を考慮して任意に設定可能である。予め壁の色に対して評価値を与える一覧を用意しておき、統一的な評価値を与えるようにしてもよいが、どれだけ目立つかというのは、壁の大きさや素材、色の鮮やかさ、周囲の環境などによっても影響を受けるため、数名の調査員による官能試験に基づいて設定することが好ましい。
図中の例では、壁の色は単色だけの場合を示したが、「1階:茶色、2階:クリーム」のように2トンカラーを表現可能としてもよい。また、(赤、50、南)、(茶色、30、東西北)のように方向に応じたデータを保持してもよい。この例は、南側は赤色、その他の方向は茶色であることを表している。
屋根は、屋根の色である。壁と同様の組合せで記述した。つまり、(緑、50、*)は、緑色の屋根、評価値50ポイント、視認可能な方向に制限なしということを表している。
ソーラーは、太陽光発電または太陽光温水器などの施設の設置を表している。(無、0、*)は、これらの施設が設置されておらず、評価値0ポイントであり、設置されていないから、いずれの方向からも視認不可能であることを表している。
屋根形状は、屋根の形状である。(三角、30、*)は、いわゆるとんがり帽子のような三角形状の屋根、評価値30ポイント、視認可能性に制限なしということを表している。屋根の形状は、目印の特徴要素としては用いやすいものの、寄せ棟、切妻、フラットなど比較的理解しやすい形状だけでなく、入母屋、しころなど、簡単には理解できない形状もあるため、案内時にイラスト等でユーザに形状を提示可能な画像データを併せて備えるようにしてもよい。
案内データは、このように種々の特徴を構造化して記録している。図中の例では、階数に対しては評価値を設けていないが、他の特徴と同様、(階数、評価値、視認可能方位)という形式で用意することも可能である。
【0039】
建物H42は、2階建ての和風民家の例であり、建物H41と同様の特徴要素を記録している。種別を「民家」としているが、「和風民家」のように記述してもよい。
建物H43は、3階建ての現代風民家の例である。屋根形状がフラットであり、屋根の色は道路から視認しづらいため、屋根については(白、0、*)というように評価値が0ポイントに設定されている。また建物H43は、出窓やバルコニーを有しているため、これらについても、特徴要素としてデータを記録した。
【0040】
案内データは、このようにそれぞれの案内目印に対して特徴要素を記述したデータであるが、そのデータの記述自体も種々の形式をとることができる。
例えば、案内データは、いわゆるテーブル型のデータベースとしてもよい。この場合は、建物H41、H42についても、出窓、バルコニーといった項目について(無、0、*)というデータ(バルコニーが無く、評価値が0ポイントであることを示す)を用意する必要があり、案内に有用とは言えないが、案内目印について統一的な構造化を図ることができる利点がある。
また、案内データは、HTMLやXMLなどのマークアップ言語を用いたデータ形式としてもよい。つまり、「屋根」、「壁」などの特徴要素をタグによって特定した上で、その内容を記述する形式をとることができる。こうすることにより、建物H41、H42に対して、出窓やバルコニーなどのように案内目印の評価に有用とは言えない特徴要素についてまでデータを用意する必要がなくなり、データ容量を低減することが可能となる。また、当初予定していなかった新たな特徴要素が生じた場合(例えば、「風見鶏」が設けられた建物が新たに見つかった場合など)、特徴要素を柔軟に追加可能となる利点もある。
【0041】
C.案内処理:
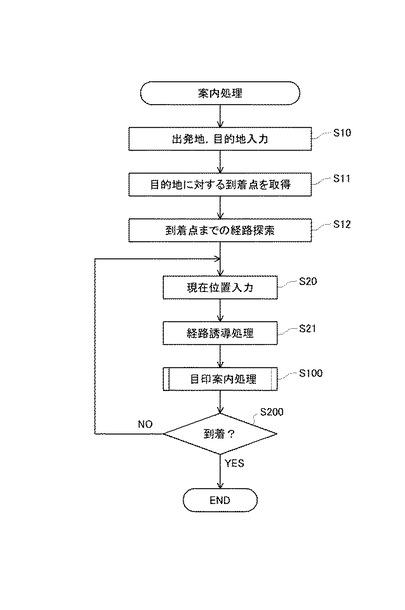
図5は、案内処理のフローチャートである。ナビゲーション装置100の経路探索部107、案内制御部108、表示制御部106が主として実行する処理であり、ハードウェア的にはナビゲーション装置100のCPU(以下、単に「CPU」という)が実行する処理である。
【0042】
この処理では、CPUは出発地および目的地を入力する(ステップS10)。出発地は、ユーザが指定してもよいし、GPSなどで取得した現在位置を出発地に設定してもよい。
目的地は、地物を指定してもよいし、座標値で指定してもよい。
【0043】
CPUは、指定された目的地に対する到着地点を取得する(ステップS11)。目的地となる地物が指定されている場合は、指定された地物に対応する地物データから到着地点を読み出せばよい。目的地が座標で指定されている場合には、当該座標がいずれのポリゴンに含まれるかを特定し、特定されたポリゴンの地物データに対応する到着地点を読み出せばよい。
到着地点が予め地物データに格納されていない場合には、図3で説明した経路探索を行って到着地点を得ればよい。
次に、CPUは、出発地から到着地点までの経路探索を行う(ステップS12)。更に、到着地点から目的地までの経路を出力してもよい。
【0044】
こうして経路が求まると、CPUは、経路案内を実行する。
GPS等で位置情報を入力し(ステップS20)、経路誘導処理を行う(ステップS21)。経路誘導処理とは、探索された経路および現在位置をナビゲーション装置100のディズプレイに表示する処理である。併せて音声案内を行ってもよい。
そして、CPUは、目印案内処理を行う(ステップS100)。目印案内処理とは、ユーザが目的地となる建物等を現地で判別できるよう、ユーザに対して目印を提示した案内を行う処理である。処理の詳細は、後述する。本実施例では、目的地に対して目印案内処理を行う例を示すが、この処理は、経路上、右左折する交差点などの案内地点を対象として行うようにしてもよい。目的地以外に目印案内処理を行うべき案内地点は、ユーザが経路上の各地点を指定するようにしてもよいし、右左折する交差点を自動的に抽出して設定してもよい。また、進行中の経路が正しいことをユーザに確信させるために、直進する部分であっても案内地点に加えることもできる。
CPUは、以上の処理(ステップS20〜S100)を目的地に到着するまで(ステップS200)、繰り返し実行する。
【0045】
D.目印案内処理:
D1.目印探索範囲等の設定:
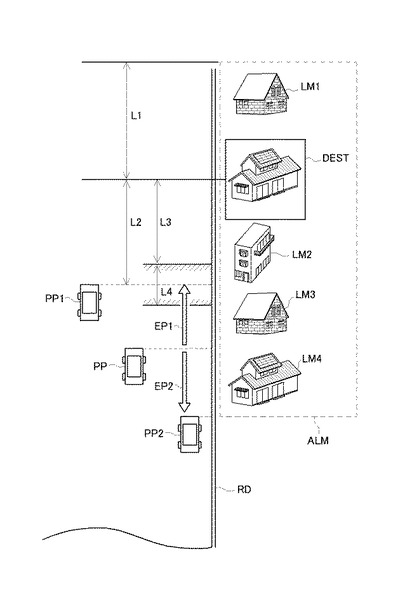
図6は、目印探索範囲および目印評価範囲の設定方法を示す説明図である。目印探索範囲、目印評価範囲は、目印案内処理で設定される範囲である。説明の便宜上、処理内容に先立って、これらの範囲の設定方法を示す。
まず、GPSによって車両の現在位置PPが得られたものとする。GPSには利用するコードや電波の受信具合などによって所定の検出誤差が含まれる。この検出誤差が前方向に誤差EP1、後方向に誤差EP2であるとする。誤差が含まれる結果、車両の現在位置は、最前方位置PP1から最後方位置PP2の間と推測される。最前方位置PP1から最後方位置PP2までの範囲を、自己位置推定範囲を称するものとする。
現在位置の誤差は、GPS等の装置によっても異なり、走行中でも電波の受信状況等に応じて変動するが、自己位置推定範囲は、これらの誤差を正確に反映したものである必要はない。後述する通り、自己位置推定範囲は、目印となる地物の抽出やその評価の基準として用いるものだからである。ただし、車両の現在位置が自己位置推定範囲から外れるのは好ましくない。従って、自己位置推定範囲は、推定される最大誤差に基づいて設定することが好ましい。この誤差は、GPS等の仕様に基づいて任意に設定可能である。
【0046】
ユーザが進行する道路RDの脇には、目印となる地物LM1〜LM4が存在するものとする。地物LM1は目的地DESTの先に位置し、地物LM2〜LM4は手前に位置している。
目印探索範囲、つまり目印となる地物を探索する範囲は、車両の現在位置および目的地DESTの位置に基づいて設定される。本実施例では、車両の最前方位置PP1から目的地DESTを越えて距離L1の位置までを目的探索範囲と設定した。図中の距離L1、L2で表される範囲が目印探索範囲となる。この目印探索範囲内の目印が案内に用いられるのである。
目印探索範囲をこのように設定した理由について説明する。仮に目印探索範囲を最後方位置PP2よりも前方で設定したとすると、地物LM4も目印として抽出される可能性が生じることになる。しかし、現在位置は最前方位置PP1である可能性もある。最前方位置PP1にいる場合には、地物LM4をすでに通りすぎているため、地物LM4は有効な目印とはなり得ない。こうした支障が生じるおそれを抑制するため、本実施例では、最前方位置PP1を基準として目印探索範囲を設定した。このように図中の距離L1、L2の範囲に目印探索範囲を設定しておけば、車両の現在位置が自己位置推定範囲(PP1〜PP2の範囲)のどこにあったとしても、それよりも前方に目印が存在することになり、有効な案内を行うことができる。
【0047】
目印探索範囲を決定する距離L1、L3は任意に設定可能である。ユーザが目印を視認可能な範囲に設定することが好ましい。また、車両の走行速度が速い場合には、早めに案内を行うことが好ましいため、走行速度が速いほど距離L3が大きくするように変化させてもよい。
【0048】
目印探索範囲から抽出された目印が、目的地DESTを一義的に特定可能かどうかは、周辺の所定範囲内に同様の目印があるかに基づいて評価する。この評価を行う範囲が目印評価範囲である。本実施例では、目印評価範囲は、最後方位置PP2よりも前方の位置で設定した。目印図中の破線で囲んだ範囲が目印評価範囲ALMである。最前方は目印探索範囲の最前方(目的地から距離L1の位置)と同じである。
このように設定した理由について説明する。仮に目印評価範囲を最前方位置PP1よりも前方、つまり目印探索範囲と同じに設定したとすると、地物LM3、LM4は目的地を一義的に特定可能か否かの評価には考慮されないことになる。かかる状態では、抽出された目印、例えば地物LM1またはLM2が、地物LM3、LM4と同じ特徴を有していたとしても、目的地を一義的に特定可能と判断されてしまう。しかし、仮に現実の車両の位置が最後方位置PP2であったとすると、ユーザは、同じ特徴を有する地物LM3、LM4を目にすることになり、案内された目印によって目的地DESTを一義的に特定することができなくなってしまう。本実施例では、こうした支障を回避するため、目印評価範囲を最後方位置PP2に基づいて設定したのである。
【0049】
目印評価範囲が最後方位置PP2に基づいて設定されるということは、自己位置推定精度を考慮して目印評価範囲が設定されることを意味する。自己位置推定精度が高い場合には、精度に応じて最後方位置PP2が前方に移動するため目印評価範囲が狭くなる。従って、目的地を一義的に特定可能な目印およびその特徴を抽出しやすくなるから、処理期間を短縮することができ、また案内内容もシンプルでわかりやすいものとすることができる。つまり、上記態様によれば、ユーザの誤解を招かないための適切な案内情報を、自己位置推定精度に応じて過不足なく与えることが可能となるのである。
【0050】
本実施例では、以上で設定された種々の範囲に基づいて目印を用いた案内を行う。この案内を行うタイミングは、車両の最前方位置PP1が、目的地DESTから距離L3以上、距離L3+L4以下の範囲(図中のハッチングを付した範囲であり、以下、これを「案内区間」という)に入った時である。車両が目的地DESTに近づきすぎた状態で案内を行うと、ユーザは目的地DESTを通り過ぎてしまうおそれがある。また、目的地から遠い場所にいるうちに案内を行うと、ユーザは目印を見つけられずに戸惑うことがある。距離L3、L4は、これらの事情を考慮して、任意に設定可能である。案内区間は、車両の走行速度によっても影響を受ける。走行速度が速い場合には、距離L3、L4ともに大きくすることが好ましい。距離L3、L4は、固定値としてもよいし、このように車両速度に応じて変化する値としてもよい。
【0051】
D2.目印案内処理の内容:
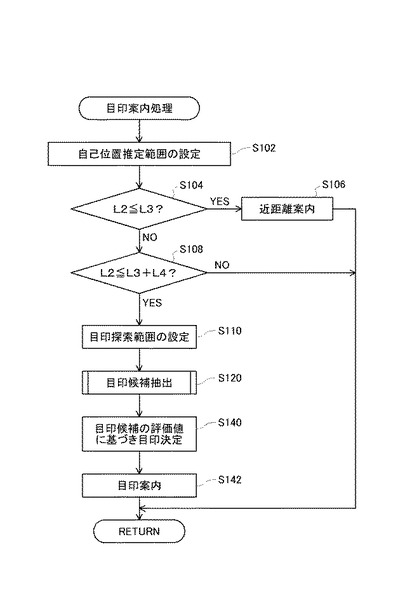
図7は、目印案内処理のフローチャートである。案内処理(図5)のステップS100に相当する処理である。
この処理では、まずCPUは、自己位置推定範囲を設定する(ステップS102)。取得された現在位置に対して、その取得誤差(図6中の誤差EP1、EP2を反映させ、最前方位置PP1、最後方位置PP2を求めるのである。
そして、車両の最前方位置PP2が、案内区間に入っているか否かを判断する。まず、距離L2≦距離L3かを判断する(ステップS104)。距離L2は目的地DESTから最前方位置PP1までの距離であり、距離L3は目的地DESTから案内区間の最前方位置までの距離である。
距離L2≦距離L3の場合には、車両が目的地DESTに近すぎることを意味しているため、CPUは、近距離案内を行う(ステップS106)。近距離案内では、「目的地周辺です」のように、ユーザがすでに目的地周辺に到着していることを表示または音声で知らせる。併せて車両の現在位置および目的地周辺の地図を拡大表示してもよい。この場合、車両の現在位置には誤差が含まれることを考慮し、地図は車両の自己位置推定範囲および目的地を包含する倍率で拡大することが好ましい。
距離L3、L4を車速に連動して変化する値としている場合には、近距離案内に応じてユーザが速度を落とすと、距離L2>距離L3に転じることが起きうる。図5に示した通り、目印案内処理(図5のステップS100)は目的地に到着するまで繰り返し実行される処理であるから、このように車速が低下した結果、距離L2>距離L3に転じた場合には、ステップS104の判断が「NO」に変化し、近距離案内を終了して、後で説明する目印を用いた案内が行われるようになる。
【0052】
距離L2>距離L3の場合(ステップS104)において、距離L2≦距離L3+L4でない場合(ステップS108)は、車両が案内区間よりも手前にあることを意味している。従って、CPUは、目印案内処理としては何も行わずに、処理を終了する。
【0053】
距離L2≦距離L3+L4の場合は(ステップS108)、車両の最前方位置PP1が案内区間に入っていることを意味する。従って、CPUは、目印探索範囲を設定する(ステップS110)。図6で説明した通り、車両の最前方位置PP1から目的地を越えて距離L1の位置まで(図6中の距離L1+L2の範囲)を目印探索範囲とするのである。
そして、CPUは、目印探索範囲から、目印候補を抽出する(ステップS120)。つまり、案内データ(図1、図4参照)に登録されている地物のうち目印探索範囲に属する地物を抽出し、その特徴要素を考慮して、目的地DESTを一義的に特定可能なものを選択するのである。処理の詳細については後述する。
目的地DESTを一義的に特定可能な目印は、一つに限られない。そこで、CPUは、案内データに登録された評価ポイントに基づいて目印の特徴をそれぞれ評価する。
CPUは、目印候補の評価値に基づいて案内に用いる目印を決定し(ステップS140)、目印を用いた案内を行う(ステップS142)。「目的地は赤い屋根の家の正面です」のように、決定された目印を特徴要素で説明するとともに、目的地との位置関係を示すのである。この案内は、ディスプレイへの表示および音声で行うことができる。
【0054】
D3.目印の評価:
図8は、目印の評価方法を示す説明図である。目印候補抽出処理(図7のステップS120)の具体例を表している。
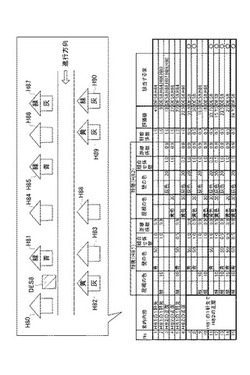
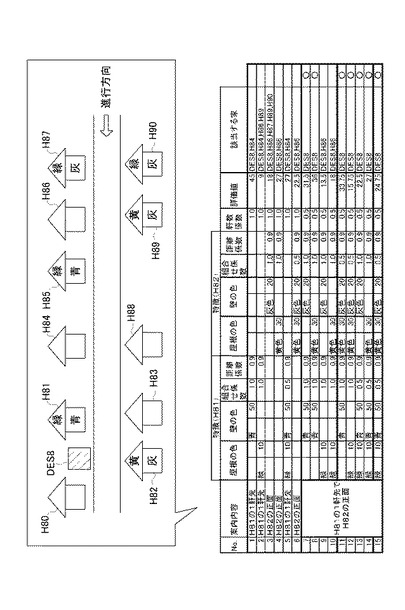
この例では、上側の図に示すようにユーザの進行する経路の両側に、家屋H80〜H90が並んでいる状態を考える。目的地DES8は、家屋H80、H81の間にある。図中、屋根および壁の色を付した家屋H81、H82、H85、H87、H89、H90は案内データに登録された家屋である。その他の家屋は、案内データには登録されておらず地物データにのみ登録されている家屋である。家屋の特徴は、種々の特徴要素によって表されるが、ここでは、簡単のため、屋根の色と壁の色だけで表されるものとした。
また、目印探索範囲と目印評価範囲は同一であるものとする。
【0055】
次に、図中の下に示した表中に記載されている3つの係数、組合せ係数、距離係数、軒数係数について説明する。これらは、それぞれの特徴要素の評価値に基づいて、目印全体の評価値を求めるために用いられる係数である。
【0056】
組合せ係数は、1つの家屋を表現するのに用いる特徴要素の数が増えるにつれて、評価ポイントを低減させるための係数である。目印を表現するためには、少ない特徴要素で単純に表現される方が理解しやすいという点で好ましいからである。特徴要素と組合せ係数との関係は、任意の設定が可能であるが、本実施例では次の通り設定した。
特徴要素数 1 、 2 、 3 、 4
組合せ係数 1.0、 0.5、 0.3、 0.1
【0057】
距離係数は、目的地DES8から目印の家屋までの距離が遠くなるにつれて、評価ポイントを低減させるための係数である。目印を表現するためには、目的地DES8に近い方が好ましいからである。距離と距離係数との関係は、任意の設定が可能であるが、本実施例では次の通り設定した。
距離(軒) 0 、1 、 2 、 3 、 4
距離係数 1.0、0.9、 0.5、 0.3、 0.1
距離が0軒とは、目的地自体を案内目印として用いる場合を意味する。
【0058】
軒数係数は、目印として用いる家屋数が増えるにつれて、評価ポイントを低減させるための係数である。本実施例では、複数軒の家屋の組合せで案内する態様も用いることができるが、目印を表現するためには、少ない家屋数で単純に表現される方が理解しやすく見つけやすいという点で好ましいからである。軒数と軒数係数との関係は、任意の設定が可能であるが、本実施例では次の通り設定した。
軒数 1 、 2 、 3 、 4
軒数係数 1.0、 0.5、 0.3、 0.1
【0059】
これらの係数を用いて、目印の評価値は次式で算出される。
目印1の評価値=(特徴要素1+特徴要素2+…)×目印1の組合せ係数×目印1の距離係数;
目印2の評価値=(特徴要素1+特徴要素2+…)×目印2の組合せ係数×目印2の距離係数;
:
全体の評価値=(目印1の評価値+目印2の評価値+…)×軒数係数;
上式によれば、まず特徴要素の組合せ、距離に応じた係数を反映させた上で特徴要素の評価値を加算して、それぞれの目印ごとの評価値を求める。そして、目印ごとの評価値を加算して、軒数係数を乗じるという手順で全体の評価値は求められる。
【0060】
図中の下側の表に基づいて、以上の評価値等を用いた評価結果を説明する。目印は目的地DES8に近い方が好ましいから、まず目的地DES8に最も近い家屋H81、H82がそれぞれ目印となるか否かを評価する。
ケース1は、家屋H81を目印として用いる場合を示している。特徴要素として壁の色(青色、評価値50ポイントとする)を用いるものとする。特徴要素は壁の色だけであるから、特徴要素数は1であるから、組合せ係数は1.0となる。距離は目的地の1軒隣であるから距離係数は0.9である。家屋H81のみを用いる場合であるから、軒数は1軒であり軒数係数は1.0である。この結果、ケース1の評価値は45(=壁の色の評価値50×距離係数0.9)となる。
そして、ケース1では、目的地は、「壁が青色の家屋の1軒先」と案内されるが、これに該当する家屋は、図中には、目的地DES8の他、家屋H84が存在する。従って、ケース1では目的地DES8を一義的に案内できないことになり、案内として用いることはできない。
【0061】
ケース2は、家屋H81の特徴要素として屋根の色(緑色、評価値10ポイントとする)を用いる場合である。このケースでは、評価値は9となる。
ケース2では、目的地は「屋根が緑色の家屋の1軒先」と案内されるが、これに該当する家屋は、目的地DES8、家屋H84、H86、H89が存在する。従って、ケース2も案内に用いることはできない。
【0062】
同様にケース3は、家屋H82の特徴要素として壁の色(灰色、評価値20ポイントとする)を用いる場合を示している。ケース4は、家屋H82の特徴要素として屋根の色(黄色、評価値30ポイントとする)を用いる場合を示している。これらは、いずれも目的地DES8以外に該当する家屋が存在するため、案内として用いることはできない。
【0063】
ケース5は、家屋H81について、壁の色と屋根の色という2つの特徴要素を組み合わせる場合である。2つの特徴要素を用いるため、組合せ係数は0.5となる。距離係数、軒数係数は、ケース1、2と同じである。この評価値は27(=(10+50)×0.5×0.9)となる。
ケース5では、目的地は「壁が青色で屋根が緑色の家の1軒先」というように2つの特徴要素で目印を特定して案内されるが、これに該当するのは目的地DES8の他、家屋H84が存在する。従って、ケース5も案内として用いることができない。
ケース6は、家屋H82について、同様に2つの特徴要素を組み合わせる場合である。ケース6に対しても、該当するのは目的地DES8の他、家屋H86が存在するため、案内として用いることができない。
以上より、結局、家屋H81、H82をそれぞれ単独で用いただけでは、目印として用いることはできないことが分かる。
【0064】
次に、家屋H81、H82を組み合わせて用いる場合を検討する。
ケース7は、家屋H81については「青い壁」という特徴要素を用い、家屋H82について「灰色の壁」という特徴要素を用いる場合である。家屋H81、H82については、それぞれ一つの特徴要素を用いるだけであるから組合せ係数はいずれも1.0である。距離係数はともに0.9となる。2軒の組合せであるから、軒数係数は0.5である。従って、評価値は31.5(=(ケース1の評価値45+ケース3の評価値18)×0.5)となる。
ケース7では、目的地は「青い壁の家の1軒先で、灰色の壁の家の正面」というように2軒の組合せで案内される。これに該当するのは目的地DES8しか存在しない。従って、ケース7は案内として用いることができる。図中には、案内として用いることができるケースに○を付した。
【0065】
ケース8は、家屋H81について「青い壁」という特徴要素を用い、家屋H82について「黄色の屋根」という特徴要素を用いた例である。ケース7に準じて算出される評価値は36(=(ケース1の評価値45+ケース4の評価値27)×0.5)となる。これに該当するのは目的地DES8しか存在しないから、案内として用いることができる。
【0066】
家屋H81について「緑色の屋根」という特徴要素を用い、家屋H82について「灰色の壁」という特徴要素を用いたのがケース9であり、「黄色の屋根」という特徴要素を用いたのがケース10である。これらのケースでは、目的地DES8の他、家屋H86が該当するため、評価値にかかわらず案内として用いることはできない。
【0067】
ケース11は、家屋H81について「青い壁」という特徴要素を用い、家屋H82について「灰色の壁」「黄色の屋根」という2つの特徴要素を用いた例である。家屋H81については組合せ係数は1.0となるが、家屋H82については2つの特徴要素を用いるため、組合せ係数は0.5となる。この結果、評価値は33.75(=(ケース1の評価値45+ケース6の評価値22.5)×0.5)となる。
ケース11では、目的地は「青い壁の家の1軒先で、灰色の壁で黄色の屋根の家の正面」と案内されることになる。これに該当するのは目的地DES8だけであるため、案内として用いることができる。
【0068】
ケース12は、家屋H81について「緑色の屋根」という特徴要素を用い、家屋H82について「灰色の壁」「黄色の屋根」という2つの特徴要素を用いた例である。ケース11に準じて算出される評価値は15.75(=(ケース2の評価値9+ケース6の評価値22.5)×0.5)となる。ケース12に該当するのは目的地DES8だけであるため、案内として用いることができる。
家屋H81について、「青い壁」「緑色の屋根」という2つの特徴要素を用い、家屋H82について「灰色の壁」という特徴要素を用いたのがケース13、「黄色の屋根」という特徴要素を用いたのがケース14である。ケース13の評価値は22.5(=(ケース5の評価値27+ケース3の評価値18)×0.5)、ケース14の評価値は27(=(ケース5の評価値27+ケース4の評価値27)×0.5)と求められる。それぞれ目的地DES8しか該当しないため、案内として用いることができる。
【0069】
ケース15は、家屋H81について「青い壁」「緑色の屋根」という2つの特徴要素を用い、家屋H82についても「灰色の壁」「黄色の屋根」という2つの特徴要素を用いた例である。家屋H81、H82の双方について組合せ係数は0.5となる。評価値は24.75(=(ケース5の評価値+ケース6の評価値)×0、5)となる。ケース15も、目的地DES8しか該当しないため、案内として用いることができる。
【0070】
こうして、各ケースについて、まず目的地DES8を一義的に特定できるか否かという観点から絞り込みを行うと、図中の○を付した7つのケースが抽出される。そして、この7つのケースの中で、最も評価値が高いケース11が案内に適しているものとして抽出される。
図8の例では、家屋H81、H82のみを用いた例を示したが、更に家屋H85等を用いて評価を行ってもよい。
【0071】
D4.目印候補抽出処理:
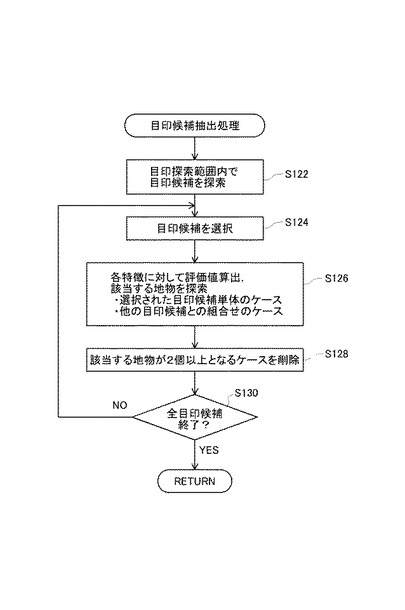
図9は、目印候補抽出処理のフローチャートである。図8で説明した方法によって目印を抽出するための処理である。
CPUは、目印探索範囲内で目印候補となる地物を探索する(ステップS122)。案内データに登録された地物のうち、目印探索範囲内に存在するものを検索すればよい。
次に、CPUは目印候補の一つを選択する(ステップS124)。選択順序は任意であるが、図8に示したように目的地に近い目印候補から選択することが好ましい。
CPUは、選択した目印候補の各特徴要素に対して評価値を算出し、この特徴要素を用いた案内を行った場合に該当する地物を目印評価範囲内で探索する(ステップS126)。この処理は、選択された目印候補を単体で用いるケースと、他の目印候補との組合せのケースとについて行う。
図8を用いて説明すると、目印候補として家屋H81を選択した場合には、家屋H81を単体で用いるケース1、2、5について評価するとともに、他の家屋H82と組合せで用いるケース7〜15について評価することになる。
家屋H81の処理が終わった後、ステップS124で家屋H82を目印候補として選択した場合には、家屋H82を単独で用いるケース3、4、6について評価が行われ、更に必要であれば、他の家屋H85等との組合せで用いるケースを評価することになる。
【0072】
CPUは、各ケースの評価結果に基づいて、該当する地物が2個以上となるケースを削除する(ステップS128)。この処理によって、図8のケース1〜6、9、10は削除されることになる。
CPUは、以上の処理を、全目印候補について実行する(ステップS130)。目的地DES8から所定の距離範囲内にある目印のみについて実行するように制限をかけてもよい。
こうすることで、目的地を一義的に特定可能な目印候補が抽出され、それぞれの評価値も得られているから、目印案内処理(図7)のステップS140では、評価値の高いケースを選択することが可能となる。
【0073】
以上で説明した本実施例の案内システムによれば、案内データ内に案内目印の特徴要素を構造化して記憶しているため、特徴要素を適宜組み合わせて、ユーザが現地で目的地などの案内地点を一義的に判別するのに過不足ない情報を提示することができる。本実施例では、目的地を案内する例を示したが、右左折する交差点を案内する場合など、種々の案内地点に対して適用可能である。また、本実施例は、住宅街のように、一言で特徴を表現できるランドマークが存在しない領域での経路案内に特に有用性が高い。
【0074】
本発明は、必ずしも上述した実施例の全ての機能を備えている必要はなく、一部のみを実現するようにしてもよい。また、上述した内容に追加の機能を設けてもよい。
本発明は上述の実施例に限定されず、その趣旨を逸脱しない範囲で種々の構成を採ることができることはいうまでもない。例えば、実施例においてハードウェア的に構成されている部分は、ソフトウェア的に構成することもでき、その逆も可能である。
【0075】
本実施例における案内システムは、案内方法としても実現できる。
経路上の所定の案内地点を案内する際の目印となり得る案内目印の位置、およびその特徴を表すように構造化された特徴要素の組合せを記憶する案内データを格納する地図データベース記憶部を備えるコンピュータによって、案内を行う案内方法であって、位置情報を取得し、メモリに記憶する現在位置取得ステップと、前記案内地点と前記現在位置に基づいて設定される所定の範囲内の案内目印を前記地図データベースから抽出し、前記構造化された特徴要素を比較して、前記案内地点を一義的に特定可能な案内目印、および一義的に特定するために必要となる1または2以上の特徴要素を設定し、メモリに記憶する案内情報設定ステップと、前記メモリに記憶された案内目印についての前記特徴要素、および前記案内目印と案内地点との位置関係を提示することで、前記案内地点の案内を行う案内ステップとを備える案内方法である。
【0076】
また、本実施例における案内システムは、コンピュータプログラムとしても実現できる。
経路上の所定の案内地点を案内する際の目印となり得る案内目印の位置、およびその特徴を表すように構造化された特徴要素の組合せを記憶する案内データを格納する地図データベース記憶部を備えるコンピュータに、現在位置に関する位置情報を取得し、メモリに記憶する現在位置取得機能と、前記案内地点と前記位置情報に基づいて設定される所定の範囲内の案内目印を前記地図データベースから抽出し、前記構造化された特徴要素を比較して、前記案内地点を一義的に特定可能な案内目印、および一義的に特定するために必要となる1または2以上の特徴要素を設定し、メモリに記憶する案内情報設定機能と、前記メモリに記憶された案内目印についての前記特徴要素、および前記案内目印と案内地点との位置関係を提示することで、前記案内地点の案内を行う案内機能とを実現させるためのプログラムである。
【産業上の利用可能性】
【0077】
本発明は、指定された目的地を案内するために利用可能である。
【符号の説明】
【0078】
100…ナビゲーション装置
101…主制御部
102…送受信部
103…コマンド入力部
104…GPS入力部
105…地図データベース記憶部
106…表示制御部
107…経路探索部
108…案内制御部
200…サーバ
201…送受信部
202…データベース管理部
210…地図データベース記憶部
211…地物データ
212…文字データ
213…ネットワークデータ
214…案内データ
【技術分野】
【0001】
本発明は、指定された目的地を案内する案内システムに関する。
【背景技術】
【0002】
道路をリンク、ノードで表したネットワークデータを用いて、指定された出発地から目的地までの経路を探索し、案内するナビゲーションシステムが普及している。ナビゲーションシステムでは、目的地の近くまで到達したユーザが、建物等を視認して、そこが目的地であることを確信できる案内を実現することが好ましい。かかる案内を実現する一つの方法として、ユーザに対して、「赤い屋根の家です」のように、目的地となる建物等の特徴を示すことが考えられる。
【0003】
特許文献1は、交差点の案内目印について、目印と交差点の距離、発見距離、固有度などで評価した上で、案内に用いる技術を開示している。
特許文献2は、ランドマークを用いて案内を行う技術を開示しており、昼夜共に視認性が良好などランドマークに付された属性を参照しながら、昼間の走行中か夜間の走行中かといった走行時の条件に応じて案内に使用するランドマークを選択する。
特許文献3は、学校、郵便局、ガソリンスタンドなど交差点付近にある目印を選択し、この目印を提示して案内を行う技術を開示している。
特許文献4は、経路の案内の他、目的地に着いた時に、「右側2階建て、目的地に着きました」のように、目的地の建物自体の特徴を示す案内を行う技術を開示している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−63571号公報
【特許文献2】特開平7−98800号公報
【特許文献3】特開平9−292260号公報
【特許文献4】特開平10−9886号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来技術では、ランドマークなど、運転者が容易に理解可能な目印を案内に利用していた。しかし、ユーザが選択する目的地は、必ずしもこのように案内に適した目印が近くに存在する場所ばかりとは限らない。また、ガソリンスタンドなど、案内に用いる目印によっては、目的地に到着するまでに、目印に該当する地物がいくつも見い出され、かえってユーザを混乱させるおそれもあった。
特許文献4は、特別なランドマークだけでなく、目的地の建物自体の特徴をも案内する技術を開示してはいる。しかし、例えば、「右側2階建て」hいる。hにドうという特徴に該当する建物は多数存在するため、有用な案内ができるとは言えなかった。案内された建物を特定できるようにするためには、「赤い屋根で白い壁の…」というように多くの特徴を述べればよいが、あまりに多くの特徴を述べられても、その特徴に該当する建物を探し出すのは非常に困難である。
【0006】
このように、ユーザが走行する場所によっては、ありふれた民家やビルなど、特別なランドマークとまで言えない地物を目印に用いて案内に用いる必要性が高いにもかかわらず、従来は、これらの目印を一義的に判別できる的確な情報を与えることはできていなかった。かかる課題は、経路の目的地を案内する場合だけでなく、右左折する交差点など経路途中の種々の地点を案内する際に共通の課題であった。
本発明は、かかる課題に鑑み、経路上の所定の案内地点を案内する際に、ユーザが、案内された目印を一義的に判別できる情報を過不足なく提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、案内システムとして構成することができる。案内システムは、ユーザが目的地や途中のポイントを指定した場合、指定された地点を現地で判別できるように目印等を案内するものである。また、経路探索と組み合わせて、経路途中で右左折するポイントや目的地など、ユーザに案内すべき点(以下、案内地点という)を自動的に設定した上で、案内を行うシステムとしてもよい。
【0008】
本発明の案内システムは、地図データベース記録部、現在位置取得部、案内情報設定部、案内部を備える。
地図データベース記憶部は、経路上の所定の案内地点を案内する際の目印となり得る案内目印の位置、およびその特徴を表すように構造化された特徴要素の組合せを記憶する案内データを格納している。例えば、建物を案内目印とする場合、屋根の色、壁の色、階数などの特徴要素に分けて、各建物の特徴を表すのである。案内地点は、先に説明した通り、ユーザが指定してもよいし、案内システムが自動的に設定してもよい。また、目的地自体を案内地点に含めることもできる。
現在位置取得部は、現在位置に関する位置情報を取得する。例えば、GPS(Global Positioning System)を用いることができる。
【0009】
案内情報設定部は、まず、案内地点と現在位置に基づいて案内目印を抽出するための所定の範囲(以下、「目印探索範囲」という)を設定し、この範囲内の案内目印を抽出する。案内目印は、案内データを参照して抽出することができる。目印探索範囲には、現在位置の前方から案内地点までの範囲を含めることが好ましいが、案内地点のさらに前方の範囲を含めても構わない。また、必ずしも現在位置から案内目印が目視できる範囲に限定する必要はない。例えば、交差点を右左折した先に案内目印が存在する場合、「交差点を曲がった後に見える○○」のように、案内目印を右左折前に案内しておくことも有用だからである。
【0010】
案内情報設定部は、案内データを参照して、構造化された特徴要素を比較して、案内地点を一義的に特定可能な案内目印、および一義的に特定するために必要となる1または2以上の特徴要素を設定する。つまり、どの案内目印を用い、どの特徴要素を提示すれば、ユーザが現地で案内目印を一義的に判別できるかを判断するのである。例えば、赤い屋根で白い壁の建物を案内目印として用いる場合、周囲に赤い屋根の建物がなければ、「赤い屋根」という特徴要素だけを用いることができる。これに対し、周囲に赤い屋根の建物がある場合には、「赤い屋根で白い壁」というように、2つの特徴要素を組み合わせて用いることができる。このように、案内目印を一義的に判別できるように、特徴要素またはその組合せを決定するのである。
【0011】
そして、案内部は、案内情報設定部の設定に従い、案内目印についての特徴要素、および案内目印と案内地点との位置関係を提示することで、案内地点の案内を行う。情報の提示は、ディスプレイ等に表示してもよいし、音声案内を行ってもよい。
【0012】
本発明の案内システムによれば、案内データ内に案内目印の特徴要素を構造化して記憶しており、現地で一義的に案内目印を判別できるように、用いるべき特徴要素を判断する。こうすることによって、本発明の案内システムは、ユーザに過不足ない情報を提示して案内目印の案内を行うことが可能となる。
【0013】
案内システムは、経路探索と組み合わせてもよい。
経路探索を実現するために、地図データベース記憶部には、さらに、道路をノード、リンクで表したネットワークデータと、道路を含む地物を描画するための地物データとを格納する。ネットワークデータは、通行規制も踏まえて自動車の経路探索に使用可能な主ネットワークと、経路探索に使用可能ではあるが通行規制の整備が完全とは言えない準ネットワークなどを混在して用意してもよい。また地物データは、先に説明した案内データと統合してもよい。
そして、出発地および目的地の指定を入力する。出発地は、ユーザの現在地を用いるようにしてもよい。目的地は、地物データに含まれる特定の建物等を指定してもよいし、地図上で座標値を指定してもよい。
上述のネットワークを用いて出発地から目的地までの経路探索を行うものとしてもよいが、更に、以下に示す到着地点取得部および経路探索部を設けて経路探索を行うようにしてもよい。
到着地点取得部は、ネットワークデータおよび地物データを参照して、自動車が通行可能な道路としてネットワークデータが整備された道路上の点であって、目的地に対応する地物からいずれかの道路を通行して到着できる点である到着地点を取得する。
到着地点は、地物データの一部として、建物等の地物ごとに設定されているものとしてもよい。この場合、到着地点取得部は、目的地として指定された地物に対応する到着地点のデータを読み込めば済む。目的地が座標値で指定された場合には、到着地点取得部は、指定された座標が対応する地物を特定し、その地物に対応する到着地点のデータを読み込めばよい。
これに対し、到着地点を予め用意しない構成とすることもできる。この場合には、到着地点取得部は、目的地を起点する経路探索によって、到着地点を見いだすことになる。この場合の経路探索には、通行規制の整備が完全とは言えない準ネットワークや、ネットワークが一切整備されてはいない道路も用いることができる。ネットワークが整備されていない道路については、地物データに含まれる道路のポリゴンデータの連結具合をネットワークデータとして扱うことにより経路探索の対象とすることができる。
経路探索部は、ネットワークデータを参照して、出発地から到着地点までの経路探索を行う。
経路探索と組み合わせた構成では、案内部は、案内とともに、位置情報に応じて、経路探索の結果を提示して案内を行う。
【0014】
経路探索と組み合わせて適用すれば、ユーザが進行する経路を踏まえて、「交差点を曲がった先」などの案内も可能となり、有用性が増大する。
また、上記態様では、主ネットワークから外れた地物を目的地とする場合でも、到着地点を用いることで経路探索、経路案内することができる点に特徴がある。主ネットワークから外れた地点への経路案内では、いわゆるランドマークと呼べる目印が少なく、ありふれた建物等しか目印になるものがないことが多い。従って、かかる経路探索を用いる場合には、特徴要素の組合せで案内目印の特定に過不足ない情報を与えるという本発明が、特に有用となるのである。
【0015】
経路探索部は、先に説明した通り、経路探索の結果を踏まえて、交差点を右左折する点など、案内地点を自動的に設定してもよい。こうすることにより、ユーザが案内地点を設定する手間が省ける他、経路を誤りやすい地点などで案内目印を用いた案内をすることが可能となり、わかりやすい経路案内を実現することができる。
【0016】
現在位置の取得には、所定の誤差が含まれるのが通常であるから、案内目印の抽出等には、こうした誤差範囲を考慮することが好ましい。現在位置の誤差は、現在位置取得部の構成に応じて決まる値である。必ずしも厳密な誤差を測定する必要はなく、概ねの誤差範囲として設定した値を用いてもよい。
例えば、案内目印を抽出する所定の範囲、即ち目印探索範囲は、現在位置取得部における誤差を考慮して得られる現在位置の最前方位置に基づいて設定してもよい。
案内目印は、ユーザの前方にあってこそ案内の役に立つ。このように最前方位置に基づいて設定しておけば、有用な案内目印を抽出することができる。
経路探索と組み合わせた態様では、ユーザの進行する経路がわかっているから、目印探索範囲は、上述の最前方位置よりも経路に沿って前方に設定すればよい。最前方位置を含めてもよいし、ユーザの進行速度に応じて最前方位置よりも更に前方に余裕をもたせて設定してもよい。
経路探索と組み合わせない態様では、上述の最前方位置と案内地点とを結ぶ線分を基準として目印探索範囲を設定することができる。例えば、この線分に所定の幅を持たせた範囲を目印探索範囲とすることができる。
【0017】
一方、現在位置の誤差は、案内目印の評価に考慮することもできる。
例えば、案内情報設定部は、現在位置取得部における誤差を考慮して得られる現在位置の最後方位置から案内地点に至るまでの範囲(以下、「目印評価範囲」という)を対象として、案内地点を一義的に特定可能か否かの判断を行うようにしてもよい。ユーザの前方に案内目印と同じ特徴を有する建物等が他に存在すると、案内目印が一義的に判別できず、案内地点も特定することができなくなる。取得された現在位置を基準として目印評価範囲を設定すると、誤差の影響によって実際の現在位置が取得された現在位置よりも後方である場合には、目印評価範囲に含まれない建物の中に案内目印と同じ特徴を有する建物が存在する可能性が生じる。これに対し、誤差も考慮した現在位置の最後方位置を基準として目印評価範囲を設定しておけば、案内目印と同じ特徴を有する建物等が実際のユーザの進行方向に存在する可能性を低くすることができるため、有用な案内を行うことが可能となる。
【0018】
本発明において案内目印の有用性の評価は、種々の方法をとることができる。例えば、案内データに特徴要素ごとに目印としての有用性を表す評価値を記憶させておいてもよい。案内情報設定部は、一義的に特定可能な案内目印が複数存在する場合には、評価値を用いた有用性の評価によって案内に使用する案内目印およびその特徴要素を設定することができる。
評価方法の一例として、案内目印に付された特徴要素のうち、現地で案内地点を一義的に特定可能な特徴要素を抽出し、抽出された特徴要素に付された評価値で評価する方法をとってもよい。案内地点を一義的に特定するために複数の特徴要素を組み合わせて使用する場合には、それぞれの特徴要素に付された評価値の最大値や、これらの評価値を用いた所定の演算式で評価を行うことができる。
ユーザが案内目印を理解しやすいという観点からは、提示する特徴要素は少ない方が好ましい。かかる点を考慮して、特徴要素を組み合わせて用いる場合には、単独で用いる場合よりも評価値を下げるようにしてもよい。
【0019】
案内情報設定部は、2以上の案内目印の組合せによって案内地点を一義的に特定可能である場合、その組合せも案内に使用するものとしてもよい。案内目印の組合せとは、「A建物の正面で、B建物の左側」のように、2以上の案内目印を用いる案内を言う。このような組合せも利用可能とすることにより、単一の案内目印で案内地点を特定し切れない場合でも、目的地の案内が可能となる。
【0020】
2以上の案内目印を組み合わせた案内は、単一の案内目印を用いる案内よりも理解しづらいことがある。
かかる観点から、案内情報設定部は、案内地点を一義的に特定するために必要となる案内目印の数の増加するほど各案内要素の特徴要素の有用性を低く評価した上で、案内に用いる案内目印、またはその組合せを設定するようにしてもよい。つまり、単一の案内目印を用いて「赤い屋根の家の正面」というように案内する場合と、2つの案内目印を用いて「赤い屋根の家の正面で、白い壁の家の左側」というように案内する場合では、後者の方が「赤い屋根」「白い壁」という特徴要素に付された評価値を下げるのである。こうすることにより、使用される案内目印が少ない案内方法を優先することができ、ユーザにとって理解しやすい案内を実現することができる。
【0021】
本発明は、その他、コンピュータを用いた経路案内方法として構成してもよいし、かかる経路案内をコンピュータに実行させるためのコンピュータプログラムとして構成してもよい。また、かかるコンピュータプログラムを記録したコンピュータが読み取り可能な記録媒体として構成してもよい。記録媒体としては、フレキシブルディスクやCD−ROM、光磁気ディスク、ICカード、ROMカートリッジ、パンチカード、バーコードなどの符号が印刷された印刷物、コンピュータの内部記憶装置(RAMやROMなどのメモリ)および外部記憶装置等、コンピュータが読取り可能な種々の媒体を利用できる。
【図面の簡単な説明】
【0022】
【図1】案内システムの構成を示す説明図である。
【図2】地図データベースの構造を示す説明図である。
【図3】到着地点の設定について示す説明図である。
【図4】案内データの構造を示す説明図である。
【図5】案内処理のフローチャートである。
【図6】目印探索範囲および目印評価範囲の設定方法を示す説明図である。
【図7】目印案内処理のフローチャートである。
【図8】目印の評価方法を示す説明図である。
【図9】目印候補抽出処理のフローチャートである。
【発明を実施するための形態】
【0023】
本発明の実施例について以下の順序で説明する。
A.システム構成:
B.データ構造:
B1.ネットワークデータ:
B2.文字データ:
B3.地物データ:
B4.到着地点の設定:
B5.案内データ:
C.案内処理:
D.目印案内処理:
D1.目印探索範囲等の設定:
D2.目印案内処理の内容:
D3.目印の評価:
D4.目印候補抽出処理:
【実施例1】
【0024】
A.システム構成:
図1は、案内システムの構成を示す説明図である。案内システムは、ナビゲーション装置100として構成される。本実施例では、ナビゲーション装置100は、地図データ等を提供するサーバ200とネットワークNEで接続されており、サーバ200から地図データベースの更新を受けられるものとした。ナビゲーション装置100は、スタンドアロンで稼働する構成としてもよいし、その機能の一部をサーバ200等で実行する構成としてもよい。
【0025】
サーバ200は、地図データベース記憶部210、送受信部201、およびデータベース管理部202を備えている。送受信部201、データベース管理部202は、ハードウェア的に構成してもよいが、本実施例では、これらの機能を実現するコンピュータプログラムをインストールすることによって、ソフトウェア的に構成するものとした。
【0026】
送受信部201は、ナビゲーション装置100とネットワークNEを介した通信を行う。本実施例では、地図データベース記憶部210に格納されたデータや、その提供を求めるためのコマンド等が通信される。
データベース管理部202は、ナビゲーション装置100から要求された地図情報を、地図データベース記憶部210から読み出す。地図データベース記憶部210には、地物データ211、文字データ212、ネットワークデータ213、および案内データ214が格納されている。
地物データ211は、道路や建物など地図に描画すべき地物のポリゴンデータである。文字データ212は、地図上に表示すべき文字情報である。例えば、建物の名称や地名などの文字情報が含まれる。ネットワークデータ213は、道路をノード、リンクのつながりで表したデータである。案内データ214は、経路案内の際にユーザに案内目印を案内するために用いられるデータであり、案内目印の特徴を構造化して表したデータである。これらのデータ構造については後述する。
案内データ214と地物データ211は統合することも可能であるが、本実施例では、個別に設けるものとした。
【0027】
ナビゲーション装置100には、主制御部101の下で稼働する種々の機能ブロックが構成されている。本実施例では、主制御部101および各機能ブロックは、それぞれの機能を実現するソフトウェアをインストールすることによって構成したが、その一部または全部をハードウェア的に構成してもよい。
送受信部102は、サーバ200とのネットワークNEを介した通信を行う。本実施例では、地図データベースおよびその提供を受けるためのコマンドの送受信が主として行われる。
コマンド入力部103は、ナビゲーション装置100に設けられたボタン、レバー、タッチパネル等の操作を通じて、ユーザからの指示を入力する。本実施例における指示としては、経路探索の出発地、目的地の指定などが挙げられる。
GPS入力部104は、GPS(Global Positioning System)を用いて位置情報を入力する。
地図データベース記憶部105は、サーバ200から提供された地図データベース記憶部210に記憶されている地図データベースを格納する。本実施例では、サーバ200が備える地図データベース記憶部210に記憶されている地図データベースの全体をナビゲーション装置100内の地図データベース記憶部105にも格納するものとしたが、経路探索や地図表示に必要となる部分のみを、その都度、サーバ200から取得するものとしてもよい。
経路探索部107は、地図データベースを参照して、経路探索を行う。
表示制御部106は、地図データベース記憶部105を用いてナビゲーション装置100のディスプレイに地図および探索された経路を表示する。
案内制御部108は、現地でユーザが目的地を判断できるよう案内目印を用いた案内を実現する。
【0028】
B.データ構造:
図2は、地図データベースの構造を示す説明図である。地物データ、文字データ、ネットワークデータに格納される情報の概要を示した。
【0029】
B1.ネットワークデータ:
ネットワークデータとは、道路をリンク、ノードで表したデータである。本実施例では、ネットワークデータとして主ネットワークデータと、準ネットワークデータの2種類が用意されている。図中に実線で示したリンクL1〜L4およびノードN1、N2が主ネットワークデータであり、破線で示したリンクL11〜L13およびノードN11、N12が準ネットワークデータである。
主ネットワークデータおよび準ネットワークデータともに、それぞれに属するリンクデータおよびノードデータを格納している。リンクデータは、それぞれのリンクを形成する点列の座標、国道・県道等の種別、車線数その他の属性情報や通行規制情報などを記録している。ノードデータは、座標値、通行規制などを記録している。
ただし、主ネットワークデータは、現地調査によって通行規制が十分に整備されたデータであり、車両の経路探索に支障なく用いることができるデータとなっている。これに対し、準ネットワークデータは、通行規制の整備が十分とは言えないデータであり、車両の経路探索では、使用しない方が好ましいデータである。本実施例でも、経路探索は原則として主ネットワークデータを用いて行うものとしている。
【0030】
B2.文字データ:
文字データ212は、地物の名称や地名などを表示する文字を規定するデータである。図中には、建物BLDの名称を表示するためのデータ例を示した。文字データは、内容、位置、地物、フォント、サイズなどの情報を格納する。
内容は、表示すべき文字列であり、図中の例では、「△△(株)」という会社名称である。
位置は、文字を表示する位置である。本実施例では、文字列の左下の点P5を基準点として、この座標値を指定するものとした。
地物は、文字が関連づけられる地物データのポリゴン名称である。
フォント、サイズは、表示する際のフォントおよびサイズの指定である。
この他、色、太字など、種々の属性を指定可能としてもよい。
【0031】
B3.地物データ:
地物データ211について、建物H1を例にとって構造を示す。地物データ211は、建物、道路等の地物を描画するためのポリゴンデータであり、名称、形状、代表点、出入口線、到着地点、属性などを格納している。
名称は、地物の名称である。ポリゴンに固有のIDを用いてもよい。
形状は、地物のポリゴンの頂点を示す座標の列である。図の例では、建物H1のポリゴンの頂点P1、P2、P3、P4の各座標が格納されている。
代表点は、地物の位置を表す地点Cの座標である。代表点は、地物の図心を用いることが多いが、任意に設定可能である。
出入口線は、地物と道路とを関連づけるための情報である。建物H1の場合、玄関から道路に出るための線分Dが出入口線として登録される。具体的には、線分Dの両端の座標が登録されることになる。出入口線は、線分Dのうち、道路上の端点のみを登録するものとしてもよい。また、出入口線は、建物や駐車場など、出入りを伴う地物に設定されるものであり、地物の全てに設定する必要はない。図の例では、建物BLDに対して正面の出入口線DB1および駐車場BLDP側の出入口線DB2、建物H2〜H4に対してそれぞれ出入口線DH2〜DH4、駐車場PKに対して出入口線DPKが設定されている。
【0032】
到着地点Gは、地物の出入口線の道路上の端点から、いずれかの道路を経てたどりつけるネットワーク上の点である。建物H1の場合、図中に点線で示す通り、出入口線Dが関連づけられている道路R21を経て、リンクL2に至ることができるため、リンクL2上に到着地点Gが設定されている。出入口線Dから道路R21を図中右方向にたどり、ノードN11で右折してノードN2に至る経路をとり、ノードN2を到着地点とすることもできる。本実施例では、建物H1からノードN2に至る道のりよりも、到着地点Gに至る道のりの方が短いから、このように設定した。到着地点は、一つに限定する必要はないから、ノードN2も到着地点に設定してもよい。
図の例では、建物H2〜H4に対する到着地点は点GHと設定されている。建物BLDに対しては、点GHおよび点GBLD2と設定されている。到着地点は、出入口線と同様、駐車場にも設定でき、図の例では、駐車場PKに対して到着地点GPKが設定されている。駐車場PKは、リンクL2に面しているため、出入口線DPKの端点と到着地点GPKが一致した状態となっている。
【0033】
B4.到着地点の設定:
図3は、到着地点の設定について示す説明図である。建物BLD1の出入口線DBを対象とする到着地点について示した。
建物BLD1の周辺の主ネットワークデータとしては、リンクL7、ノードN7およびリンクL5、L6およびノードN5、N6が存在する。準ネットワークデータとしては、破線で示したリンクL14が存在する。
建物BLD1の出入口線DBからいずれかの道路を経て主ネットワークにたどりつく経路としては、図中に点線で示した3通りがあげられる。道路R24を経てリンクL7にたどりつく経路、道路R25を経てたリンクL6およびリンクL5にそれぞれたどりつく経路である。これらの各経路がリンクL7、L6、L5にたどりつく点が到着地点G7、G6、G5となる。
【0034】
これらの到着地点は、経路探索によって求めることができる。本実施例では、それぞれの地物は、出入口線によって、いずれかの道路に関連づけられているから、出入口点、つまり出入口線の道路上の端点を始点とする経路探索によって到着地点を求めればよい。
この経路探索は、主ネットワークデータ、準ネットワークデータおよび道路のポリゴンの全てを用いてもよい。道路のポリゴンは、リンク、ノードで構成されている訳ではないが、隣接するポリゴンを指定するデータは持っているから、ポリゴン同士のつながり関係は規定されており、リンク、ノードと同様に、経路探索に使用することが可能である。出入口点を起点とする経路探索の結果、主ネットワークデータにたどり着いた点を到着地点とすればよい。
【0035】
図の例のように、到着地点がG7、G6、G5の3点見いだされる場合、これらの3点を建物BLD1の到着地点として用いてもよいし、例えば、地物からの道のりが最短の地点、地物からの距離が最短の地点、地物から到着地点までの経路と準ネットワークデータとの重複部分が多い点、地物から出発点に向かう方角に近い点などの基準で選択してもよい。
図の例においては、地物からの道のりや距離を基準として選べば、建物BLD1に最も近い点G5が到着地点となる。準ネットワークデータとの重複部分を基準として選べば、点G6が到着地点となる。出発地が図の左端方向にある場合には、出発地の方角を基準として選べば、点G7が到着地点となる。
【0036】
本実施例では、上述の手順で、到着地点を設定し、地物データ211に予め設定しておくものとした。到着地点は、予め設定しておくのではなく、経路探索などの処理の過程で求めるものとしてもよい。
【0037】
B5.案内データ:
図4は、案内データの構造を示す説明図である。案内データは、経路案内の際に目的地をユーザが現地で判別できるよう案内目印を提供するために用いられるデータである。案内データでは、案内目印となり得る建物等の地物について、その特徴を複数の特徴要素によって構造化して記憶している。案内データは、地物データに含まれる全ての地物に対して用意する必要はなく、構造化して特徴を記述し得る地物についてのみ用意すれば足りる。かかる観点から、本実施例では、案内データは地物データとは個別のデータとしたが、地物を対象としている以上、地物データの属性の一部に特徴要素を組み込むことによって統合データとして構築することも可能である。
【0038】
図中には、建物H41〜H43の案内データを例示した。案内データは、それぞれ名称、位置、種別、階数、壁、屋根、ソーラー、屋根形状などの情報を記憶している。建物H41を例にとってその内容を説明する。
名称は、建物に付された名称であり、地物データと対応づけるインデックスである。
位置は、建物H41の位置座標(緯度、経度)である。
種別は、建物H41の種別である。この例では、「民家」となっているが、「洋風民家」のように更に細分化した種別としてもよい。
階数は、建物H41が2階建てであることを示している。「総2階」のように建物の外観構造をより詳細に表す内容としてもよい。
壁は、建物H41の壁の色、構造を表している。この例では、(レンガ、50、*)という組合せで記述した。これは、レンガ色またはレンガ造りであること、その評価値が50ポイントであること、そして「*」は特徴を視認できる向きに制限がないことを表している。評価値とは、その特徴要素を案内に用いた場合の有効性を表す指標であり、特徴要素がどれだけ目立つかを表す指標と言うこともできる。評価値は、このような心理的な影響を考慮して任意に設定可能である。予め壁の色に対して評価値を与える一覧を用意しておき、統一的な評価値を与えるようにしてもよいが、どれだけ目立つかというのは、壁の大きさや素材、色の鮮やかさ、周囲の環境などによっても影響を受けるため、数名の調査員による官能試験に基づいて設定することが好ましい。
図中の例では、壁の色は単色だけの場合を示したが、「1階:茶色、2階:クリーム」のように2トンカラーを表現可能としてもよい。また、(赤、50、南)、(茶色、30、東西北)のように方向に応じたデータを保持してもよい。この例は、南側は赤色、その他の方向は茶色であることを表している。
屋根は、屋根の色である。壁と同様の組合せで記述した。つまり、(緑、50、*)は、緑色の屋根、評価値50ポイント、視認可能な方向に制限なしということを表している。
ソーラーは、太陽光発電または太陽光温水器などの施設の設置を表している。(無、0、*)は、これらの施設が設置されておらず、評価値0ポイントであり、設置されていないから、いずれの方向からも視認不可能であることを表している。
屋根形状は、屋根の形状である。(三角、30、*)は、いわゆるとんがり帽子のような三角形状の屋根、評価値30ポイント、視認可能性に制限なしということを表している。屋根の形状は、目印の特徴要素としては用いやすいものの、寄せ棟、切妻、フラットなど比較的理解しやすい形状だけでなく、入母屋、しころなど、簡単には理解できない形状もあるため、案内時にイラスト等でユーザに形状を提示可能な画像データを併せて備えるようにしてもよい。
案内データは、このように種々の特徴を構造化して記録している。図中の例では、階数に対しては評価値を設けていないが、他の特徴と同様、(階数、評価値、視認可能方位)という形式で用意することも可能である。
【0039】
建物H42は、2階建ての和風民家の例であり、建物H41と同様の特徴要素を記録している。種別を「民家」としているが、「和風民家」のように記述してもよい。
建物H43は、3階建ての現代風民家の例である。屋根形状がフラットであり、屋根の色は道路から視認しづらいため、屋根については(白、0、*)というように評価値が0ポイントに設定されている。また建物H43は、出窓やバルコニーを有しているため、これらについても、特徴要素としてデータを記録した。
【0040】
案内データは、このようにそれぞれの案内目印に対して特徴要素を記述したデータであるが、そのデータの記述自体も種々の形式をとることができる。
例えば、案内データは、いわゆるテーブル型のデータベースとしてもよい。この場合は、建物H41、H42についても、出窓、バルコニーといった項目について(無、0、*)というデータ(バルコニーが無く、評価値が0ポイントであることを示す)を用意する必要があり、案内に有用とは言えないが、案内目印について統一的な構造化を図ることができる利点がある。
また、案内データは、HTMLやXMLなどのマークアップ言語を用いたデータ形式としてもよい。つまり、「屋根」、「壁」などの特徴要素をタグによって特定した上で、その内容を記述する形式をとることができる。こうすることにより、建物H41、H42に対して、出窓やバルコニーなどのように案内目印の評価に有用とは言えない特徴要素についてまでデータを用意する必要がなくなり、データ容量を低減することが可能となる。また、当初予定していなかった新たな特徴要素が生じた場合(例えば、「風見鶏」が設けられた建物が新たに見つかった場合など)、特徴要素を柔軟に追加可能となる利点もある。
【0041】
C.案内処理:
図5は、案内処理のフローチャートである。ナビゲーション装置100の経路探索部107、案内制御部108、表示制御部106が主として実行する処理であり、ハードウェア的にはナビゲーション装置100のCPU(以下、単に「CPU」という)が実行する処理である。
【0042】
この処理では、CPUは出発地および目的地を入力する(ステップS10)。出発地は、ユーザが指定してもよいし、GPSなどで取得した現在位置を出発地に設定してもよい。
目的地は、地物を指定してもよいし、座標値で指定してもよい。
【0043】
CPUは、指定された目的地に対する到着地点を取得する(ステップS11)。目的地となる地物が指定されている場合は、指定された地物に対応する地物データから到着地点を読み出せばよい。目的地が座標で指定されている場合には、当該座標がいずれのポリゴンに含まれるかを特定し、特定されたポリゴンの地物データに対応する到着地点を読み出せばよい。
到着地点が予め地物データに格納されていない場合には、図3で説明した経路探索を行って到着地点を得ればよい。
次に、CPUは、出発地から到着地点までの経路探索を行う(ステップS12)。更に、到着地点から目的地までの経路を出力してもよい。
【0044】
こうして経路が求まると、CPUは、経路案内を実行する。
GPS等で位置情報を入力し(ステップS20)、経路誘導処理を行う(ステップS21)。経路誘導処理とは、探索された経路および現在位置をナビゲーション装置100のディズプレイに表示する処理である。併せて音声案内を行ってもよい。
そして、CPUは、目印案内処理を行う(ステップS100)。目印案内処理とは、ユーザが目的地となる建物等を現地で判別できるよう、ユーザに対して目印を提示した案内を行う処理である。処理の詳細は、後述する。本実施例では、目的地に対して目印案内処理を行う例を示すが、この処理は、経路上、右左折する交差点などの案内地点を対象として行うようにしてもよい。目的地以外に目印案内処理を行うべき案内地点は、ユーザが経路上の各地点を指定するようにしてもよいし、右左折する交差点を自動的に抽出して設定してもよい。また、進行中の経路が正しいことをユーザに確信させるために、直進する部分であっても案内地点に加えることもできる。
CPUは、以上の処理(ステップS20〜S100)を目的地に到着するまで(ステップS200)、繰り返し実行する。
【0045】
D.目印案内処理:
D1.目印探索範囲等の設定:
図6は、目印探索範囲および目印評価範囲の設定方法を示す説明図である。目印探索範囲、目印評価範囲は、目印案内処理で設定される範囲である。説明の便宜上、処理内容に先立って、これらの範囲の設定方法を示す。
まず、GPSによって車両の現在位置PPが得られたものとする。GPSには利用するコードや電波の受信具合などによって所定の検出誤差が含まれる。この検出誤差が前方向に誤差EP1、後方向に誤差EP2であるとする。誤差が含まれる結果、車両の現在位置は、最前方位置PP1から最後方位置PP2の間と推測される。最前方位置PP1から最後方位置PP2までの範囲を、自己位置推定範囲を称するものとする。
現在位置の誤差は、GPS等の装置によっても異なり、走行中でも電波の受信状況等に応じて変動するが、自己位置推定範囲は、これらの誤差を正確に反映したものである必要はない。後述する通り、自己位置推定範囲は、目印となる地物の抽出やその評価の基準として用いるものだからである。ただし、車両の現在位置が自己位置推定範囲から外れるのは好ましくない。従って、自己位置推定範囲は、推定される最大誤差に基づいて設定することが好ましい。この誤差は、GPS等の仕様に基づいて任意に設定可能である。
【0046】
ユーザが進行する道路RDの脇には、目印となる地物LM1〜LM4が存在するものとする。地物LM1は目的地DESTの先に位置し、地物LM2〜LM4は手前に位置している。
目印探索範囲、つまり目印となる地物を探索する範囲は、車両の現在位置および目的地DESTの位置に基づいて設定される。本実施例では、車両の最前方位置PP1から目的地DESTを越えて距離L1の位置までを目的探索範囲と設定した。図中の距離L1、L2で表される範囲が目印探索範囲となる。この目印探索範囲内の目印が案内に用いられるのである。
目印探索範囲をこのように設定した理由について説明する。仮に目印探索範囲を最後方位置PP2よりも前方で設定したとすると、地物LM4も目印として抽出される可能性が生じることになる。しかし、現在位置は最前方位置PP1である可能性もある。最前方位置PP1にいる場合には、地物LM4をすでに通りすぎているため、地物LM4は有効な目印とはなり得ない。こうした支障が生じるおそれを抑制するため、本実施例では、最前方位置PP1を基準として目印探索範囲を設定した。このように図中の距離L1、L2の範囲に目印探索範囲を設定しておけば、車両の現在位置が自己位置推定範囲(PP1〜PP2の範囲)のどこにあったとしても、それよりも前方に目印が存在することになり、有効な案内を行うことができる。
【0047】
目印探索範囲を決定する距離L1、L3は任意に設定可能である。ユーザが目印を視認可能な範囲に設定することが好ましい。また、車両の走行速度が速い場合には、早めに案内を行うことが好ましいため、走行速度が速いほど距離L3が大きくするように変化させてもよい。
【0048】
目印探索範囲から抽出された目印が、目的地DESTを一義的に特定可能かどうかは、周辺の所定範囲内に同様の目印があるかに基づいて評価する。この評価を行う範囲が目印評価範囲である。本実施例では、目印評価範囲は、最後方位置PP2よりも前方の位置で設定した。目印図中の破線で囲んだ範囲が目印評価範囲ALMである。最前方は目印探索範囲の最前方(目的地から距離L1の位置)と同じである。
このように設定した理由について説明する。仮に目印評価範囲を最前方位置PP1よりも前方、つまり目印探索範囲と同じに設定したとすると、地物LM3、LM4は目的地を一義的に特定可能か否かの評価には考慮されないことになる。かかる状態では、抽出された目印、例えば地物LM1またはLM2が、地物LM3、LM4と同じ特徴を有していたとしても、目的地を一義的に特定可能と判断されてしまう。しかし、仮に現実の車両の位置が最後方位置PP2であったとすると、ユーザは、同じ特徴を有する地物LM3、LM4を目にすることになり、案内された目印によって目的地DESTを一義的に特定することができなくなってしまう。本実施例では、こうした支障を回避するため、目印評価範囲を最後方位置PP2に基づいて設定したのである。
【0049】
目印評価範囲が最後方位置PP2に基づいて設定されるということは、自己位置推定精度を考慮して目印評価範囲が設定されることを意味する。自己位置推定精度が高い場合には、精度に応じて最後方位置PP2が前方に移動するため目印評価範囲が狭くなる。従って、目的地を一義的に特定可能な目印およびその特徴を抽出しやすくなるから、処理期間を短縮することができ、また案内内容もシンプルでわかりやすいものとすることができる。つまり、上記態様によれば、ユーザの誤解を招かないための適切な案内情報を、自己位置推定精度に応じて過不足なく与えることが可能となるのである。
【0050】
本実施例では、以上で設定された種々の範囲に基づいて目印を用いた案内を行う。この案内を行うタイミングは、車両の最前方位置PP1が、目的地DESTから距離L3以上、距離L3+L4以下の範囲(図中のハッチングを付した範囲であり、以下、これを「案内区間」という)に入った時である。車両が目的地DESTに近づきすぎた状態で案内を行うと、ユーザは目的地DESTを通り過ぎてしまうおそれがある。また、目的地から遠い場所にいるうちに案内を行うと、ユーザは目印を見つけられずに戸惑うことがある。距離L3、L4は、これらの事情を考慮して、任意に設定可能である。案内区間は、車両の走行速度によっても影響を受ける。走行速度が速い場合には、距離L3、L4ともに大きくすることが好ましい。距離L3、L4は、固定値としてもよいし、このように車両速度に応じて変化する値としてもよい。
【0051】
D2.目印案内処理の内容:
図7は、目印案内処理のフローチャートである。案内処理(図5)のステップS100に相当する処理である。
この処理では、まずCPUは、自己位置推定範囲を設定する(ステップS102)。取得された現在位置に対して、その取得誤差(図6中の誤差EP1、EP2を反映させ、最前方位置PP1、最後方位置PP2を求めるのである。
そして、車両の最前方位置PP2が、案内区間に入っているか否かを判断する。まず、距離L2≦距離L3かを判断する(ステップS104)。距離L2は目的地DESTから最前方位置PP1までの距離であり、距離L3は目的地DESTから案内区間の最前方位置までの距離である。
距離L2≦距離L3の場合には、車両が目的地DESTに近すぎることを意味しているため、CPUは、近距離案内を行う(ステップS106)。近距離案内では、「目的地周辺です」のように、ユーザがすでに目的地周辺に到着していることを表示または音声で知らせる。併せて車両の現在位置および目的地周辺の地図を拡大表示してもよい。この場合、車両の現在位置には誤差が含まれることを考慮し、地図は車両の自己位置推定範囲および目的地を包含する倍率で拡大することが好ましい。
距離L3、L4を車速に連動して変化する値としている場合には、近距離案内に応じてユーザが速度を落とすと、距離L2>距離L3に転じることが起きうる。図5に示した通り、目印案内処理(図5のステップS100)は目的地に到着するまで繰り返し実行される処理であるから、このように車速が低下した結果、距離L2>距離L3に転じた場合には、ステップS104の判断が「NO」に変化し、近距離案内を終了して、後で説明する目印を用いた案内が行われるようになる。
【0052】
距離L2>距離L3の場合(ステップS104)において、距離L2≦距離L3+L4でない場合(ステップS108)は、車両が案内区間よりも手前にあることを意味している。従って、CPUは、目印案内処理としては何も行わずに、処理を終了する。
【0053】
距離L2≦距離L3+L4の場合は(ステップS108)、車両の最前方位置PP1が案内区間に入っていることを意味する。従って、CPUは、目印探索範囲を設定する(ステップS110)。図6で説明した通り、車両の最前方位置PP1から目的地を越えて距離L1の位置まで(図6中の距離L1+L2の範囲)を目印探索範囲とするのである。
そして、CPUは、目印探索範囲から、目印候補を抽出する(ステップS120)。つまり、案内データ(図1、図4参照)に登録されている地物のうち目印探索範囲に属する地物を抽出し、その特徴要素を考慮して、目的地DESTを一義的に特定可能なものを選択するのである。処理の詳細については後述する。
目的地DESTを一義的に特定可能な目印は、一つに限られない。そこで、CPUは、案内データに登録された評価ポイントに基づいて目印の特徴をそれぞれ評価する。
CPUは、目印候補の評価値に基づいて案内に用いる目印を決定し(ステップS140)、目印を用いた案内を行う(ステップS142)。「目的地は赤い屋根の家の正面です」のように、決定された目印を特徴要素で説明するとともに、目的地との位置関係を示すのである。この案内は、ディスプレイへの表示および音声で行うことができる。
【0054】
D3.目印の評価:
図8は、目印の評価方法を示す説明図である。目印候補抽出処理(図7のステップS120)の具体例を表している。
この例では、上側の図に示すようにユーザの進行する経路の両側に、家屋H80〜H90が並んでいる状態を考える。目的地DES8は、家屋H80、H81の間にある。図中、屋根および壁の色を付した家屋H81、H82、H85、H87、H89、H90は案内データに登録された家屋である。その他の家屋は、案内データには登録されておらず地物データにのみ登録されている家屋である。家屋の特徴は、種々の特徴要素によって表されるが、ここでは、簡単のため、屋根の色と壁の色だけで表されるものとした。
また、目印探索範囲と目印評価範囲は同一であるものとする。
【0055】
次に、図中の下に示した表中に記載されている3つの係数、組合せ係数、距離係数、軒数係数について説明する。これらは、それぞれの特徴要素の評価値に基づいて、目印全体の評価値を求めるために用いられる係数である。
【0056】
組合せ係数は、1つの家屋を表現するのに用いる特徴要素の数が増えるにつれて、評価ポイントを低減させるための係数である。目印を表現するためには、少ない特徴要素で単純に表現される方が理解しやすいという点で好ましいからである。特徴要素と組合せ係数との関係は、任意の設定が可能であるが、本実施例では次の通り設定した。
特徴要素数 1 、 2 、 3 、 4
組合せ係数 1.0、 0.5、 0.3、 0.1
【0057】
距離係数は、目的地DES8から目印の家屋までの距離が遠くなるにつれて、評価ポイントを低減させるための係数である。目印を表現するためには、目的地DES8に近い方が好ましいからである。距離と距離係数との関係は、任意の設定が可能であるが、本実施例では次の通り設定した。
距離(軒) 0 、1 、 2 、 3 、 4
距離係数 1.0、0.9、 0.5、 0.3、 0.1
距離が0軒とは、目的地自体を案内目印として用いる場合を意味する。
【0058】
軒数係数は、目印として用いる家屋数が増えるにつれて、評価ポイントを低減させるための係数である。本実施例では、複数軒の家屋の組合せで案内する態様も用いることができるが、目印を表現するためには、少ない家屋数で単純に表現される方が理解しやすく見つけやすいという点で好ましいからである。軒数と軒数係数との関係は、任意の設定が可能であるが、本実施例では次の通り設定した。
軒数 1 、 2 、 3 、 4
軒数係数 1.0、 0.5、 0.3、 0.1
【0059】
これらの係数を用いて、目印の評価値は次式で算出される。
目印1の評価値=(特徴要素1+特徴要素2+…)×目印1の組合せ係数×目印1の距離係数;
目印2の評価値=(特徴要素1+特徴要素2+…)×目印2の組合せ係数×目印2の距離係数;
:
全体の評価値=(目印1の評価値+目印2の評価値+…)×軒数係数;
上式によれば、まず特徴要素の組合せ、距離に応じた係数を反映させた上で特徴要素の評価値を加算して、それぞれの目印ごとの評価値を求める。そして、目印ごとの評価値を加算して、軒数係数を乗じるという手順で全体の評価値は求められる。
【0060】
図中の下側の表に基づいて、以上の評価値等を用いた評価結果を説明する。目印は目的地DES8に近い方が好ましいから、まず目的地DES8に最も近い家屋H81、H82がそれぞれ目印となるか否かを評価する。
ケース1は、家屋H81を目印として用いる場合を示している。特徴要素として壁の色(青色、評価値50ポイントとする)を用いるものとする。特徴要素は壁の色だけであるから、特徴要素数は1であるから、組合せ係数は1.0となる。距離は目的地の1軒隣であるから距離係数は0.9である。家屋H81のみを用いる場合であるから、軒数は1軒であり軒数係数は1.0である。この結果、ケース1の評価値は45(=壁の色の評価値50×距離係数0.9)となる。
そして、ケース1では、目的地は、「壁が青色の家屋の1軒先」と案内されるが、これに該当する家屋は、図中には、目的地DES8の他、家屋H84が存在する。従って、ケース1では目的地DES8を一義的に案内できないことになり、案内として用いることはできない。
【0061】
ケース2は、家屋H81の特徴要素として屋根の色(緑色、評価値10ポイントとする)を用いる場合である。このケースでは、評価値は9となる。
ケース2では、目的地は「屋根が緑色の家屋の1軒先」と案内されるが、これに該当する家屋は、目的地DES8、家屋H84、H86、H89が存在する。従って、ケース2も案内に用いることはできない。
【0062】
同様にケース3は、家屋H82の特徴要素として壁の色(灰色、評価値20ポイントとする)を用いる場合を示している。ケース4は、家屋H82の特徴要素として屋根の色(黄色、評価値30ポイントとする)を用いる場合を示している。これらは、いずれも目的地DES8以外に該当する家屋が存在するため、案内として用いることはできない。
【0063】
ケース5は、家屋H81について、壁の色と屋根の色という2つの特徴要素を組み合わせる場合である。2つの特徴要素を用いるため、組合せ係数は0.5となる。距離係数、軒数係数は、ケース1、2と同じである。この評価値は27(=(10+50)×0.5×0.9)となる。
ケース5では、目的地は「壁が青色で屋根が緑色の家の1軒先」というように2つの特徴要素で目印を特定して案内されるが、これに該当するのは目的地DES8の他、家屋H84が存在する。従って、ケース5も案内として用いることができない。
ケース6は、家屋H82について、同様に2つの特徴要素を組み合わせる場合である。ケース6に対しても、該当するのは目的地DES8の他、家屋H86が存在するため、案内として用いることができない。
以上より、結局、家屋H81、H82をそれぞれ単独で用いただけでは、目印として用いることはできないことが分かる。
【0064】
次に、家屋H81、H82を組み合わせて用いる場合を検討する。
ケース7は、家屋H81については「青い壁」という特徴要素を用い、家屋H82について「灰色の壁」という特徴要素を用いる場合である。家屋H81、H82については、それぞれ一つの特徴要素を用いるだけであるから組合せ係数はいずれも1.0である。距離係数はともに0.9となる。2軒の組合せであるから、軒数係数は0.5である。従って、評価値は31.5(=(ケース1の評価値45+ケース3の評価値18)×0.5)となる。
ケース7では、目的地は「青い壁の家の1軒先で、灰色の壁の家の正面」というように2軒の組合せで案内される。これに該当するのは目的地DES8しか存在しない。従って、ケース7は案内として用いることができる。図中には、案内として用いることができるケースに○を付した。
【0065】
ケース8は、家屋H81について「青い壁」という特徴要素を用い、家屋H82について「黄色の屋根」という特徴要素を用いた例である。ケース7に準じて算出される評価値は36(=(ケース1の評価値45+ケース4の評価値27)×0.5)となる。これに該当するのは目的地DES8しか存在しないから、案内として用いることができる。
【0066】
家屋H81について「緑色の屋根」という特徴要素を用い、家屋H82について「灰色の壁」という特徴要素を用いたのがケース9であり、「黄色の屋根」という特徴要素を用いたのがケース10である。これらのケースでは、目的地DES8の他、家屋H86が該当するため、評価値にかかわらず案内として用いることはできない。
【0067】
ケース11は、家屋H81について「青い壁」という特徴要素を用い、家屋H82について「灰色の壁」「黄色の屋根」という2つの特徴要素を用いた例である。家屋H81については組合せ係数は1.0となるが、家屋H82については2つの特徴要素を用いるため、組合せ係数は0.5となる。この結果、評価値は33.75(=(ケース1の評価値45+ケース6の評価値22.5)×0.5)となる。
ケース11では、目的地は「青い壁の家の1軒先で、灰色の壁で黄色の屋根の家の正面」と案内されることになる。これに該当するのは目的地DES8だけであるため、案内として用いることができる。
【0068】
ケース12は、家屋H81について「緑色の屋根」という特徴要素を用い、家屋H82について「灰色の壁」「黄色の屋根」という2つの特徴要素を用いた例である。ケース11に準じて算出される評価値は15.75(=(ケース2の評価値9+ケース6の評価値22.5)×0.5)となる。ケース12に該当するのは目的地DES8だけであるため、案内として用いることができる。
家屋H81について、「青い壁」「緑色の屋根」という2つの特徴要素を用い、家屋H82について「灰色の壁」という特徴要素を用いたのがケース13、「黄色の屋根」という特徴要素を用いたのがケース14である。ケース13の評価値は22.5(=(ケース5の評価値27+ケース3の評価値18)×0.5)、ケース14の評価値は27(=(ケース5の評価値27+ケース4の評価値27)×0.5)と求められる。それぞれ目的地DES8しか該当しないため、案内として用いることができる。
【0069】
ケース15は、家屋H81について「青い壁」「緑色の屋根」という2つの特徴要素を用い、家屋H82についても「灰色の壁」「黄色の屋根」という2つの特徴要素を用いた例である。家屋H81、H82の双方について組合せ係数は0.5となる。評価値は24.75(=(ケース5の評価値+ケース6の評価値)×0、5)となる。ケース15も、目的地DES8しか該当しないため、案内として用いることができる。
【0070】
こうして、各ケースについて、まず目的地DES8を一義的に特定できるか否かという観点から絞り込みを行うと、図中の○を付した7つのケースが抽出される。そして、この7つのケースの中で、最も評価値が高いケース11が案内に適しているものとして抽出される。
図8の例では、家屋H81、H82のみを用いた例を示したが、更に家屋H85等を用いて評価を行ってもよい。
【0071】
D4.目印候補抽出処理:
図9は、目印候補抽出処理のフローチャートである。図8で説明した方法によって目印を抽出するための処理である。
CPUは、目印探索範囲内で目印候補となる地物を探索する(ステップS122)。案内データに登録された地物のうち、目印探索範囲内に存在するものを検索すればよい。
次に、CPUは目印候補の一つを選択する(ステップS124)。選択順序は任意であるが、図8に示したように目的地に近い目印候補から選択することが好ましい。
CPUは、選択した目印候補の各特徴要素に対して評価値を算出し、この特徴要素を用いた案内を行った場合に該当する地物を目印評価範囲内で探索する(ステップS126)。この処理は、選択された目印候補を単体で用いるケースと、他の目印候補との組合せのケースとについて行う。
図8を用いて説明すると、目印候補として家屋H81を選択した場合には、家屋H81を単体で用いるケース1、2、5について評価するとともに、他の家屋H82と組合せで用いるケース7〜15について評価することになる。
家屋H81の処理が終わった後、ステップS124で家屋H82を目印候補として選択した場合には、家屋H82を単独で用いるケース3、4、6について評価が行われ、更に必要であれば、他の家屋H85等との組合せで用いるケースを評価することになる。
【0072】
CPUは、各ケースの評価結果に基づいて、該当する地物が2個以上となるケースを削除する(ステップS128)。この処理によって、図8のケース1〜6、9、10は削除されることになる。
CPUは、以上の処理を、全目印候補について実行する(ステップS130)。目的地DES8から所定の距離範囲内にある目印のみについて実行するように制限をかけてもよい。
こうすることで、目的地を一義的に特定可能な目印候補が抽出され、それぞれの評価値も得られているから、目印案内処理(図7)のステップS140では、評価値の高いケースを選択することが可能となる。
【0073】
以上で説明した本実施例の案内システムによれば、案内データ内に案内目印の特徴要素を構造化して記憶しているため、特徴要素を適宜組み合わせて、ユーザが現地で目的地などの案内地点を一義的に判別するのに過不足ない情報を提示することができる。本実施例では、目的地を案内する例を示したが、右左折する交差点を案内する場合など、種々の案内地点に対して適用可能である。また、本実施例は、住宅街のように、一言で特徴を表現できるランドマークが存在しない領域での経路案内に特に有用性が高い。
【0074】
本発明は、必ずしも上述した実施例の全ての機能を備えている必要はなく、一部のみを実現するようにしてもよい。また、上述した内容に追加の機能を設けてもよい。
本発明は上述の実施例に限定されず、その趣旨を逸脱しない範囲で種々の構成を採ることができることはいうまでもない。例えば、実施例においてハードウェア的に構成されている部分は、ソフトウェア的に構成することもでき、その逆も可能である。
【0075】
本実施例における案内システムは、案内方法としても実現できる。
経路上の所定の案内地点を案内する際の目印となり得る案内目印の位置、およびその特徴を表すように構造化された特徴要素の組合せを記憶する案内データを格納する地図データベース記憶部を備えるコンピュータによって、案内を行う案内方法であって、位置情報を取得し、メモリに記憶する現在位置取得ステップと、前記案内地点と前記現在位置に基づいて設定される所定の範囲内の案内目印を前記地図データベースから抽出し、前記構造化された特徴要素を比較して、前記案内地点を一義的に特定可能な案内目印、および一義的に特定するために必要となる1または2以上の特徴要素を設定し、メモリに記憶する案内情報設定ステップと、前記メモリに記憶された案内目印についての前記特徴要素、および前記案内目印と案内地点との位置関係を提示することで、前記案内地点の案内を行う案内ステップとを備える案内方法である。
【0076】
また、本実施例における案内システムは、コンピュータプログラムとしても実現できる。
経路上の所定の案内地点を案内する際の目印となり得る案内目印の位置、およびその特徴を表すように構造化された特徴要素の組合せを記憶する案内データを格納する地図データベース記憶部を備えるコンピュータに、現在位置に関する位置情報を取得し、メモリに記憶する現在位置取得機能と、前記案内地点と前記位置情報に基づいて設定される所定の範囲内の案内目印を前記地図データベースから抽出し、前記構造化された特徴要素を比較して、前記案内地点を一義的に特定可能な案内目印、および一義的に特定するために必要となる1または2以上の特徴要素を設定し、メモリに記憶する案内情報設定機能と、前記メモリに記憶された案内目印についての前記特徴要素、および前記案内目印と案内地点との位置関係を提示することで、前記案内地点の案内を行う案内機能とを実現させるためのプログラムである。
【産業上の利用可能性】
【0077】
本発明は、指定された目的地を案内するために利用可能である。
【符号の説明】
【0078】
100…ナビゲーション装置
101…主制御部
102…送受信部
103…コマンド入力部
104…GPS入力部
105…地図データベース記憶部
106…表示制御部
107…経路探索部
108…案内制御部
200…サーバ
201…送受信部
202…データベース管理部
210…地図データベース記憶部
211…地物データ
212…文字データ
213…ネットワークデータ
214…案内データ
【特許請求の範囲】
【請求項1】
所定の地点を案内する案内システムであって、
所定の案内地点を案内する際の目印となり得る案内目印の位置、およびその特徴を表すように構造化された特徴要素の組合せを記憶する案内データを格納する地図データベース記憶部と、
現在位置に関する位置情報を取得する現在位置取得部と、
前記案内地点と前記位置情報とに基づいて設定される所定の範囲内の案内目印を抽出し、前記構造化された特徴要素を比較して、前記案内地点を一義的に特定可能な案内目印、および一義的に特定するために必要となる1または2以上の特徴要素を設定する案内情報設定部と、
前記案内目印についての前記特徴要素、および前記案内目印と案内地点との位置関係を提示することで、前記案内地点の案内を行う案内部とを備える案内システム。
【請求項2】
請求項1記載の案内システムであって、
前記地図データベース記憶部は、さらに、道路をノード、リンクで表したネットワークデータと、道路を含む地物を描画するための地物データとを格納しており、
出発地および目的地を入力する入力部と、
前記ネットワークデータおよび地物データを参照して、自動車が通行可能な道路として前記ネットワークデータが整備された道路上の点であって、前記目的地に対応する地物からいずれかの道路を通行して到着できる点である到着地点を取得する到着地点取得部と、
前記ネットワークデータを参照して、前記出発地から前記到着地点までの経路探索を行う経路探索部とを備え、
前記案内部は、前記案内とともに、前記位置情報に応じて、前記経路探索の結果を提示する案内システム。
【請求項3】
請求項2記載の案内システムであって、
前記経路探索部は、更に、経路探索の結果に基づいて前記案内地点を設定する案内システム。
【請求項4】
請求項1〜3いずれか記載の案内システムであって、
前記案内情報設定部は、前記現在位置取得部における誤差を考慮して得られる現在位置の最前方位置に基づいて前記案内目印を抽出する所定の範囲を設定する案内システム。
【請求項5】
請求項1〜4いずれか記載の案内システムであって、
前記案内情報設定部は、前記現在位置取得部における誤差を考慮して得られる現在位置の最後方位置から前記案内地点に至るまでの範囲を対象として、前記案内地点を一義的に特定可能か否かの判断を行う案内システム。
【請求項6】
請求項1〜5いずれか記載の案内システムであって、
前記案内データは、前記特徴要素ごとに、前記目印としての有用性を表す評価値を記憶しており、
前記案内情報設定部は、前記一義的に特定可能な案内目印が複数存在する場合に、前記評価値を用いた有用性の評価によって案内に使用する案内目印およびその特徴要素を設定する案内システム。
【請求項7】
請求項6記載の案内システムであって、
前記案内情報設定部は、2以上の前記案内目印の組合せによって前記案内地点を一義的に特定可能である場合、該組合せも前記案内に使用するとともに、前記案内地点を一義的に特定するために必要となる前記案内目印の数の増加するほど各案内要素の特徴要素の有用性を低く評価した上で、前記案内に用いる案内目印、またはその組合せを設定する案内システム。
【請求項8】
請求項1〜6いずれか記載の案内システムであって、
前記案内情報設定部は、2以上の前記案内目印の組合せによって前記案内地点を一義的に特定可能である場合、該組合せも前記案内に使用する案内システム。
【請求項1】
所定の地点を案内する案内システムであって、
所定の案内地点を案内する際の目印となり得る案内目印の位置、およびその特徴を表すように構造化された特徴要素の組合せを記憶する案内データを格納する地図データベース記憶部と、
現在位置に関する位置情報を取得する現在位置取得部と、
前記案内地点と前記位置情報とに基づいて設定される所定の範囲内の案内目印を抽出し、前記構造化された特徴要素を比較して、前記案内地点を一義的に特定可能な案内目印、および一義的に特定するために必要となる1または2以上の特徴要素を設定する案内情報設定部と、
前記案内目印についての前記特徴要素、および前記案内目印と案内地点との位置関係を提示することで、前記案内地点の案内を行う案内部とを備える案内システム。
【請求項2】
請求項1記載の案内システムであって、
前記地図データベース記憶部は、さらに、道路をノード、リンクで表したネットワークデータと、道路を含む地物を描画するための地物データとを格納しており、
出発地および目的地を入力する入力部と、
前記ネットワークデータおよび地物データを参照して、自動車が通行可能な道路として前記ネットワークデータが整備された道路上の点であって、前記目的地に対応する地物からいずれかの道路を通行して到着できる点である到着地点を取得する到着地点取得部と、
前記ネットワークデータを参照して、前記出発地から前記到着地点までの経路探索を行う経路探索部とを備え、
前記案内部は、前記案内とともに、前記位置情報に応じて、前記経路探索の結果を提示する案内システム。
【請求項3】
請求項2記載の案内システムであって、
前記経路探索部は、更に、経路探索の結果に基づいて前記案内地点を設定する案内システム。
【請求項4】
請求項1〜3いずれか記載の案内システムであって、
前記案内情報設定部は、前記現在位置取得部における誤差を考慮して得られる現在位置の最前方位置に基づいて前記案内目印を抽出する所定の範囲を設定する案内システム。
【請求項5】
請求項1〜4いずれか記載の案内システムであって、
前記案内情報設定部は、前記現在位置取得部における誤差を考慮して得られる現在位置の最後方位置から前記案内地点に至るまでの範囲を対象として、前記案内地点を一義的に特定可能か否かの判断を行う案内システム。
【請求項6】
請求項1〜5いずれか記載の案内システムであって、
前記案内データは、前記特徴要素ごとに、前記目印としての有用性を表す評価値を記憶しており、
前記案内情報設定部は、前記一義的に特定可能な案内目印が複数存在する場合に、前記評価値を用いた有用性の評価によって案内に使用する案内目印およびその特徴要素を設定する案内システム。
【請求項7】
請求項6記載の案内システムであって、
前記案内情報設定部は、2以上の前記案内目印の組合せによって前記案内地点を一義的に特定可能である場合、該組合せも前記案内に使用するとともに、前記案内地点を一義的に特定するために必要となる前記案内目印の数の増加するほど各案内要素の特徴要素の有用性を低く評価した上で、前記案内に用いる案内目印、またはその組合せを設定する案内システム。
【請求項8】
請求項1〜6いずれか記載の案内システムであって、
前記案内情報設定部は、2以上の前記案内目印の組合せによって前記案内地点を一義的に特定可能である場合、該組合せも前記案内に使用する案内システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−203149(P2011−203149A)
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願番号】特願2010−71352(P2010−71352)
【出願日】平成22年3月26日(2010.3.26)
【出願人】(597151563)株式会社ゼンリン (155)
【Fターム(参考)】
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願日】平成22年3月26日(2010.3.26)
【出願人】(597151563)株式会社ゼンリン (155)
【Fターム(参考)】
[ Back to top ]