
案内装置、案内方法、および、案内プログラム
【課題】目印対象物の認識精度を向上可能な案内装置、案内方法、および、案内プログラムを提供する。
【解決手段】目印対象物の画像認識に係る認識テンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する。また、案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断し、認識自信度が向上したと判断された場合(S120:YES)、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する(S121)。これにより、新規テンプレートに基づいて目印対象物を認識できる可能性が高まり、目印対象物の認識精度が向上する。
【解決手段】目印対象物の画像認識に係る認識テンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する。また、案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断し、認識自信度が向上したと判断された場合(S120:YES)、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する(S121)。これにより、新規テンプレートに基づいて目印対象物を認識できる可能性が高まり、目印対象物の認識精度が向上する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、案内装置、案内方法、および、案内プログラムに関する。
【背景技術】
【0002】
従来、例えばカメラ等を用いて車両周辺の地物を撮像し、撮像された画像の画像認識を行うことが公知である。また、車両前方画像から検出された特徴物のうち、ドライバが認識している特徴物のみを用い、ドライバにとって最適な経路案内情報を生成することが公知である(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−5668号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、案内すべき地点にある特徴物について、案内すべき地点付近では特徴物を認識可能であっても、案内すべき地点から離れた地点において、例えば電柱や街路樹等の遮蔽物があり特徴物の一部が隠れてしまっている場合、案内すべき地点から離れた地点から特徴物を認識できない場合がある。
本発明は、上述の課題に鑑みてなされたものであり、その目的は、目印対象物の認識精度を向上可能な案内装置、案内方法、および、案内プログラムを提供することにある。
【課題を解決するための手段】
【0005】
請求項1に記載のナビゲーション装置は、設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定手段と、車両の周辺画像を取得する画像取得手段と、目印対象物の画像認識に係るテンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出手段と、案内すべき地点の手前であって案内すべき地点の案内の実施に係る案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内すべき地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断する向上判断手段と、向上判断手段において認識自信度が向上したと判断された場合、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する格納手段と、を備える。
【0006】
これにより、目印対象物に近づくことにより認識自信度が向上した目印対象物について、認識自信度が低かったときの画像が新規テンプレートとして追加されるので、例えば同一地点を再度通過した場合等、同じ目印対象物を認識する場合、新規テンプレートに基づいて目印対象物を認識できる可能性が高まり、目印対象物の認識精度が向上する。
【0007】
請求項2に記載の発明では、認識自信度に基づき、案内実施地点において目印対象物が認識できたか否かを判断する認識判断手段と、認識判断手段により目印対象物が認識できたと判断された場合、目印対象物を用いて案内すべき地点を案内する案内手段と、を備える。これにより、目印対象物を用いて案内すべき地点を適切に案内することができる。
【0008】
請求項3に記載の発明では、格納手段は、認識判断手段により案内実施地点において目印対象物が認識できなかったと判断された場合、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を新規テンプレートとして格納する。これにより、案内実施地点で認識できなかった目印対象物を案内実施地点にて認識できる可能性が高まり、目印対象物の認識精度が向上する。
【0009】
請求項4に記載の発明では、案内手段は、案内すべき地点に複数の目印対象物があり、認識判断手段により複数の目印対象物が認識できたと判断された場合、案内実施地点における認識自信度が最も高い目印対象物を用いて案内すべき地点を案内する。これにより、目印対象物を用いて案内すべき地点をより適切に案内することができる。
【0010】
請求項5に記載の発明では、案内手段は、案内すべき地点に複数の目印対象物があり、認識判断手段により複数の目印対象物が認識できたと判断された場合、案内すべき地点における目印対象物の位置に基づいて設定される優先度が最も高い目印対象物を用いて案内すべき地点を案内する。これにより、目印対象物を用いて案内すべき地点をより適切に案内することができる。
【0011】
請求項6に記載の案内方法は、設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定段階と、車両の周辺画像を取得する画像取得段階と、目印対象物の画像認識に係るテンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出段階と、案内すべき地点の手前であって案内すべき地点の案内の実施に係る案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内すべき地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断する向上判断段階と、向上判断段階において認識自信度が向上したと判断された場合、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する格納段階と、を備える。
これにより、請求項1に記載の案内装置と同様の効果を奏する。
【0012】
請求項7に記載の案内プログラムは、設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定手段、車両の周辺画像を取得する画像取得手段、目印対象物の画像認識に係るテンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出手段、案内すべき地点の手前であって案内すべき地点の案内の実施に係る案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内すべき地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断する向上判断手段、および、向上判断手段において認識自信度が向上したと判断された場合、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する格納手段、としてコンピュータを機能させる。
これにより、請求項1に記載の案内装置と同様の効果を奏する。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態の案内装置の構成を示すブロック図である。
【図2】本発明の一実施形態による案内処理を説明するフローチャートである。
【図3】本発明の一実施形態による案内処理を説明するフローチャートである。
【図4】本発明の一実施形態による認識テンプレートの更新を説明する説明図である。
【図5】本発明の一実施形態による対象画像を説明する説明図である。
【図6】本発明の一実施形態による交差点Cまでの距離と認識自信度とを説明する説明図である。
【図7】本発明の一実施形態によるトリガ地点を再度通過するときの認識自信度を説明する説明図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態による案内装置を図面に基づいて説明する。
(一実施形態)
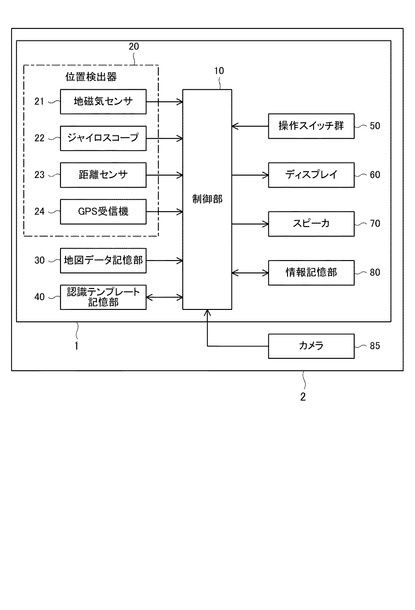
図1に示すように、案内装置としての車載器1は、車両2に搭載されている。
車載器1は、所謂車載用ナビゲーション装置であるが、例えば携帯電話やパソコン等、車載用ナビゲーション装置に限らない。車載器1は、制御部10を中心に構成されており、制御部10に接続される位置検出器20、地図データ記憶部30、認識テンプレート記憶部40、操作スイッチ群50、ディスプレイ60、スピーカ70、および情報記憶部80等を備えている。
【0015】
制御部10は、通常のコンピュータとして構成されており、内部には、CPU、ROM、RAM、I/O、および、これらの構成を接続するバスライン等を有している。
位置検出器20は、いずれも周知の地磁気センサ21、ジャイロスコープ22、距離センサ23、および、衛星からの電波を受信するGPS(Global Positioning System)受信機24等を有している。これらのセンサ等21〜24は、各々が性質の異なる誤差を持っているため、相互に補完しながら使用される。
【0016】
地図データ記憶部30は、例えばハードディスク装置(HDD)として実現される記憶装置である。なお、本実施形態ではHDDを用いたが、DVD−ROMやメモリカード等他の媒体を用いても差し支えない。地図データ記憶部30は、位置検出の精度向上のための所謂マップマッチング用データ、および、経路を探索するための地図データを記憶している。地図データには、各種データが含まれるが、その一つとして施設に関する施設情報が含まれる。施設情報は、具体的には施設を特定するIDと関連付けられて記憶されているPOI(Point Of Interest)情報である。POI情報には、施設名称、施設ID、位置座標、種別(ジャンル)、住所、電話番号を示す情報などが含まれる。また、地図データには、ノードに関するノードデータ、道路(リンク)に関するリンクデータ等が含まれる。各ノードには、ノードの案内に用いられる地物であるランドマークに関するランドマーク情報が関連づけて記憶されている。ランドマーク情報には、各ランドマークがノードに対して設置されている位置に関する情報が含まれる。なお、ランドマークは、例えばノード近傍の構造物、施設の看板、道路標識等である。
【0017】
認識テンプレート記憶部40は、地図データ記憶部30と同一のHDDで構成される。もちろん、メモリカード等の他の媒体を用いてもよい。認識テンプレート記憶部40には、ランドマークを画像認識するための認識テンプレートが記憶されている。この認識テンプレートが「画像認識に係るテンプレート」と対応している。なお、認識テンプレートは、画像データであってもよいし、特徴量データであってもよい。
【0018】
操作スイッチ群50は、ディスプレイ60と一体になったタッチスイッチもしくはメカニカルなスイッチやリモコン装置等で構成され、各種入力に使用される。
ディスプレイ60は、液晶などを用いて構成される画面を有するカラーディスプレイ装置である。ディスプレイ60を介して地図や施設情報などが表示される。スピーカ70は、音声を出力するためのものであり、例えば経路の案内等を音声で行う場合に使用される。
【0019】
情報記憶部80は、カメラ85により撮像された画像、および、目印対象物が認識できたか否かの判断に係る認識自信度等を記憶するためのものであり、地図データ記憶部30と同一のHDDで構成される。もちろん、メモリカード等の他の媒体を用いてもよい。
また、制御部10には、カメラ85が接続されている。カメラ85は、車両2の周辺の画像を撮像する。本実施形態のカメラ85は、車両2の前方の画像を撮像するフロントカメラである。
【0020】
本実施形態では、設定された経路上の案内すべき地点の目印となる目印対象物の認識精度を向上すべく、認識テンプレートの追加更新を行っている。
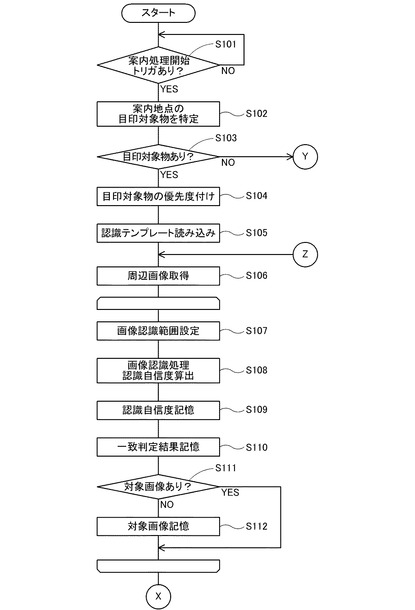
ここで、本実施形態による案内処理を図2および図3に示すフローチャートに基づいて説明する。なお、図2および図3に示す案内処理は、経路を設定して走行しているときに所定の間隔で実行される処理である。
【0021】
最初のステップS101(以下、「ステップ」を省略し、単に記号「S」で示す。)では、案内処理開始トリガがあるか否かを判断する。例えば、案内すべき地点(以下、「案内地点」という。)の所定距離(例えば200m)手前にて案内地点に係る案内を行う場合、各種処理に係る時間や発話時間等を考慮してさらに手前に設定される地点であるトリガ地点を通過したとき、案内処理開始トリガがあると判断する。案内地点は、例えば経路に従って走行した場合に右折または左折する交差点等である。案内開始トリガがないと判断された場合(S101:NO)、この判断処理を繰り返す。案内開始トリガがあると判断された場合(S101:YES)、S102へ移行する。
【0022】
S102では、地図データ記憶部30を参照し、案内地点の目印となる目印対象物を特定する。
S103では、案内地点の目印となる目印対象物があるか否かを判断する。目印対象物がないと判断された場合(S103:NO)、図3中のS116へ移行する。目印対象物があると判断された場合(S103:YES)、S104へ移行する。
【0023】
S104では、目印対象物の優先度付けを行う。目印対象物の優先度は、案内地点における目印対象物の位置やユーザの嗜好等に基づいて設定される。本実施形態では、目印対象物の位置に基づいて優先度が設定されるものとし、車両2が案内地点へ至る進行方向に対し、案内地点の手前側であって進行方向左側の優先度が最も高く、次いで案内地点の奥側であって進行方向左側、案内地点の手前側であって進行方向右側、案内地点の奥側であって進行方向右側の順とする。なお、案内地点における目印対象物が1つである場合、優先度付けは行わずに次のステップS105へ移行する。
【0024】
S105では、特定された目印対象物を画像認識するための認識テンプレートを認識テンプレート記憶部40から読み込む。なお、案内地点における目印対象物が複数ある場合には、目印対象物ごとに認識テンプレートを読み込む。
S106では、カメラ85により車両2の周辺画像を取得する。本実施形態では、車両2の前方の画像が周辺画像として取得される。また、周辺画像を取得した地点と案内地点との距離を取得する。
【0025】
S107〜S112の処理は、S104で設定された優先度が高い順に、目印対象物ごとに行われる。
S107では、S106にて取得された周辺画像において、画像認識を行う画像認識範囲を設定する。例えば、目印対象物が案内地点の奥側であって進行方向左側である場合、周辺画像の左上近傍の所定範囲を画像認識範囲として設定する、といった具合に、地図上の目印対象物の位置、カメラ85の画角、道路形状、車両挙動等に基づき、画像認識範囲を設定する。画像認識範囲を設定して画像認識を行うことにより、処理速度を向上することができる。
【0026】
S108では、S105にて読み込まれた認識テンプレートに基づき、S107にて設定された画像認識範囲の画像認識処理を行い、取得された周辺画像における目印対象物に係る画像である対象画像を特定し、当該対象画像について目印対象物が認識できたか否かの判断に係る認識自信度を算出する。本実施形態における認識自信度は、対象画像と認識テンプレートとをマッチング処理したときの類似率である。
【0027】
S109では、S108にて算出された認識自信度を情報記憶部80に記憶する。なお、認識自信度は、当該認識自信度の算出に用いた周辺画像が取得された地点と案内地点との距離と関連づけて記憶される。
S110では、認識自信度に基づき、今回取得された対象画像が目印対象物と一致するか否かを判定し、判定結果を認識自信度と関連づけて情報記憶部80に記憶する。なお、認識自信度が所定の閾値(例えば70%)以上である場合、目印対象物と一致したと判定し、判定結果として「一致」を示す旨の情報が記憶される。また、認識自信度が所定の閾値より小さい場合、目印対象物と一致していないと判定し、判定結果として「不一致」を示す旨の情報が記憶される。
【0028】
S111では、当該目印対象物と関連づけられた対象画像が情報記憶部80に記憶されているか否かを判断する。対象画像が記憶されている場合(S111:YES)、S112の処理を行わない。対象画像が記憶されていない場合(S111:NO)、S112へ移行する。
S112では、対象画像を目印対象物と関連づけて情報記憶部80に記憶する。なお、既に対象画像が記憶されている場合、すなわちS111にて肯定判断された場合、対象画像は記憶されない。したがって、本実施形態では、トリガ地点を通過後、最初の対象画像のみを記憶している。
【0029】
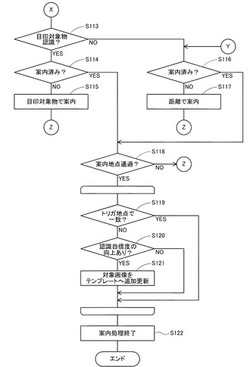
全ての目印対象物についてS107〜S112に係る処理が終了した後に移行する図3中のS113では、少なくとも1つの目印対象物が認識できたか否かを判断する。目印対象物が認識できたか否かの判断は、情報記憶部80に記憶されている一致判定結果に基づいて判断され、少なくとも1つの目印対象物について「一致」を示す旨の情報が記憶されている場合、目印対象物が認識できたと判断し、全ての目印対象物について「一致」を示す旨の情報が記憶されていない場合、目印対象物が認識できなかったと判断する。目印対象物が認識できなかったと判断された場合(S113:NO)、S116へ移行する。少なくとも1つの目印対象物が認識できたと判断された場合(S113:YES)、S114へ移行する。
【0030】
S114では、案内地点に係る案内(発話)済みか否かを判断する。案内地点に係る案内済みであると判断された場合(S114:YES)、S118へ移行する。案内地点に係る案内済みでないと判断された場合(S114:NO)、S115へ移行する。
【0031】
S115では、目印対象物により案内地点の案内を行う。例えば目印対象物がコンビニエンスストアA(以下、「コンビニA」という。)であり、案内地点を右折する場合、「この先、コンビニAのある交差点を右折です」といった具合に、スピーカ70を介して案内する。なお本実施形態では、複数の目印対象物が認識できている場合、認識できた目印対象物のうち、S104にて設定された優先度が最も高い目印対象物を用いて案内を行う。そして、図2中のS106へ戻る。
【0032】
案内地点に目印対象物がないと判断された場合(S103:NO)、または、目印対象物が認識できなかったと判断された場合(S113:NO)に移行するS116では、案内地点に係る案内(発話)済みか否かを判断する。案内地点に係る案内済みであると判断された場合(S116:YES)、S118へ移行する。案内地点に係る案内済みでないと判断された場合(S116:NO)、S117へ移行する。
【0033】
S117では、案内地点までの距離により案内地点の案内を行う。例えば200m先の案内地点を右折する場合、「この先、200m先の交差点を右折です」といった具合に、スピーカ70を介して案内する。そして、図2中のS106へ戻る。
【0034】
案内地点に係る案内済みであると判断された場合(S114:YES、または、S116:YES)に移行するS118では、車両2が案内地点を通過したか否かを判断する。案内地点を通過していないと判断された場合(S118:NO)、図2中のS106へ戻る。案内地点を通過したと判断された場合(S118:YES)、S119へ移行する。
【0035】
S119〜S121に係る処理は、目印対象物ごとに行われる。
S119では、トリガ地点にて取得された対象画像が目印対象物と一致すると判定されていたか否かを判断する。トリガ地点にて取得された対象画像が目印対象物と一致すると判定されていたと判断された場合(S119:YES)、S120およびS121の処理を行わない。トリガ地点にて取得された対象画像が目印対象物と一致しないと判定されていたと判断された場合(S119:NO)、S120へ移行する。
【0036】
S120では、情報記憶部80に記憶された認識自信度を参照し、案内地点に近づくことにより認識自信度が向上したか否かを判断する。本実施形態では、トリガ地点と案内地点との間にて取得された周辺画像に基づく認識自信度が所定の閾値より高かった場合、認識自信度が向上したと判断する。認識自信度が向上していないと判断された場合(S120:NO)、S121の処理を行わない。認識自信度が向上したと判断された場合(S120:YES)、S121へ移行する。
【0037】
S121では、情報記憶部80に記憶されている対象画像、すなわちトリガ地点にて取得された周辺画像に基づく目印対象物の画像である対象画像を、当該対象画像に関連づけられている目印対象物の新規テンプレートとして認識テンプレート記憶部40に格納する。これにより、認識テンプレート記憶部40に記憶されている認識テンプレートが追加更新される。なお、認識テンプレート記憶部40に格納される新規テンプレートは、認識テンプレート同様、画像データであってもよいし、特徴量データであってもよい。
【0038】
全ての目印対象物についてS119〜S121に係る処理が終了した後に移行するS122では、案内処理を終了する。このとき、情報記憶部80に記憶されている対象画像および認識自信度の履歴を削除する。
なお、本実施形態では、トリガ地点が「案内すべき地点の手前であって、案内すべき地点の案内の実施に係る案内実施地点」に対応するが、例えば案内地点に係る案内(発話)を開始する地点や、案内地点に係る案内(発話)が終了する地点を「案内実施地点」とみなしてもよい。
【0039】
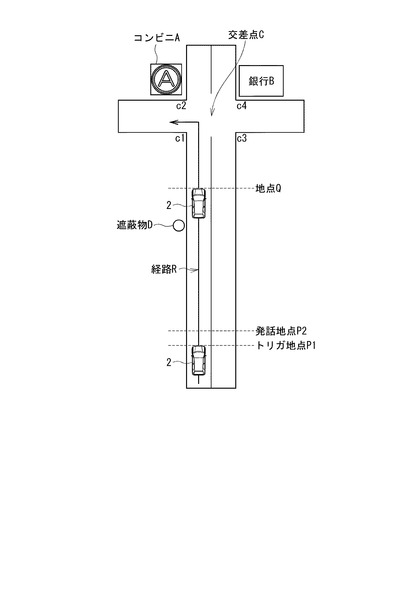
ここで、本実施形態における案内処理の具体例を図4に基づいて説明する。
図4に示すように、車両2は、経路Rを設定して走行中であり、交差点Cにて左折する経路が設定されている。すなわち、交差点Cは案内地点である。また、交差点Cまでの距離が200mである発話地点P2にて発話が終了するように、その10m手前の地点がトリガ地点P1であるものとする。
【0040】
車両2がトリガ地点P1を通過すると(S101)、案内地点である交差点Cの目印となる目印対象物として、コンビニAの看板(以下、単に「コンビニA」という。)および銀行Bの看板(以下、単に「銀行B」という。)が取得される(S102、S103:YES)。交差点Cにおいて、交差点Cの左側手前の地点c1、左側奥の地点c2、右側手前の地点c3、右側奥の地点c4の順に優先度が高いものとすると、地点c2にあるコンビニAは、地点c4にある銀行Bよりも優先度が高いので、優先度は、コンビニA、銀行Bの順と優先度付けされる(S104)。また、コンビニAおよび銀行Bの認識テンプレートを認識テンプレート記憶部40から読み込む(S105)。さらにまた、トリガ地点P1における車両2の前方の画像を周辺画像として取得し(S106)、画像認識処理を行う。
【0041】
ここでは、コンビニAの画像認識処理について説明する。
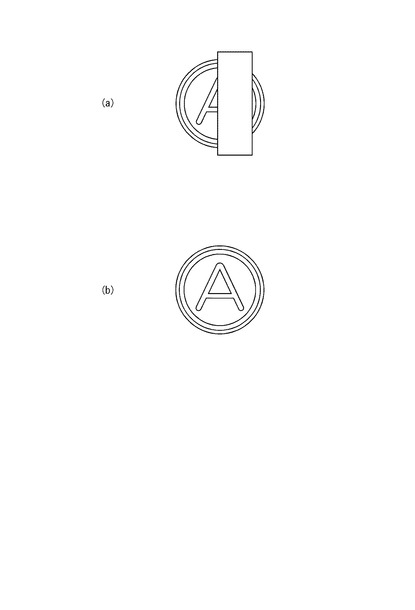
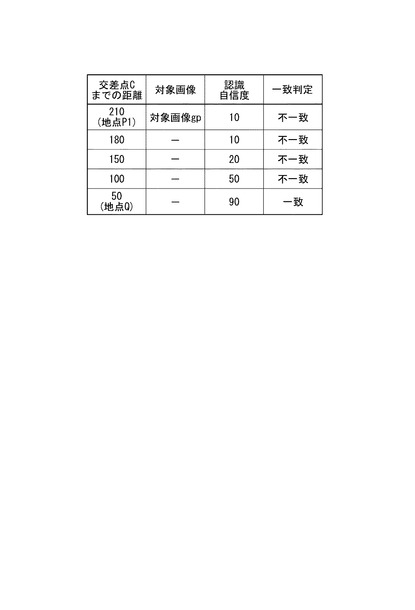
トリガ地点P1にて取得された周辺画像における画像認識範囲を設定し(S107)、画像認識処理を行い、目印対象物に係る画像である対象画像gpを特定し、認識自信度を算出する(S108)。この例では、トリガ地点P1の位置にある車両2の前方に電柱等の遮蔽物Dがあり、対象画像gpは、図5(a)に示すように、コンビニAの看板の一部が隠れてしまっている。そのため、対象画像gpと認識テンプレートとに基づく画像認識処理により算出される認識自信度は10%であり(S108)、所定の閾値より低いので、目印対象物と一致しないと判定される(S110)。また、車両2がトリガ地点P1を通過した時点では、対象画像は記憶されていないので(S111:NO)、図6に示すように、交差点までの距離「210m」、「対象画像gp」、認識自信度「10%」、判定結果「不一致」を関連づけて情報記憶部80に記憶する(S109、S110、S112)。
なお、銀行Bについても同様の処理が行われる。
【0042】
また、トリガ地点P1にて取得された周辺画像について画像認識処理を行ったとき、銀行Bが交差点Cの目印対象物として認識できたとすると(S113:YES)、認識できた目印対象物である銀行Bを用い、「この先、銀行Bのある交差点Cを左折です」といった具合に交差点Cの案内を行う(S115)。なお、トリガ地点P1にて取得された周辺画像について画像認識処理を行ったとき、銀行Bが交差点Cの目印対象物としてできなかったとすると(S113:NO)、交差点Cまでの距離を用い、「この先、200m先の交差点Cを左折です」といった具合に交差点Cの案内を行う(S117)。
【0043】
車両2の現在位置が交差点Cまでの距離が50mの地点Qであるとき、車両2は、コンビニAの一部を隠していた遮蔽物Dを通過しているので、前方に遮蔽物がなくなり、対象画像gqは図5(b)に示す如くとなる。このように車両2と目印対象物であるコンビニAとの間に遮蔽物がない状態で取得された周辺画像に基づく対象画像gqと認識テンプレートとに基づいて画像認識処理を行うと、認識自信度は、90%と向上する(図6参照)。
【0044】
車両2が交差点Cを通過した後(S118:YES)、コンビニAについて、図6に示すコンビニAについての認識自信度および一致判定結果を参照すると、トリガ地点P1にて取得された対象画像gpの認識自信度が10%と所定の閾値よりも低く、トリガ地点P1と交差点Cの間の地点である地点Qにて取得された対象画像gqの認識自信度が90%と所定の閾値よりも高く、認識自信度が向上しているので(S119:NO、S120:YES)、トリガ地点P1において取得された画像であって、図5(a)に示す如く、遮蔽物によりコンビニAの看板の一部が隠されている画像である対象画像gpを、コンビニAの認識に係る新規テンプレートとして認識テンプレート記憶部40に格納する(S121)。
【0045】
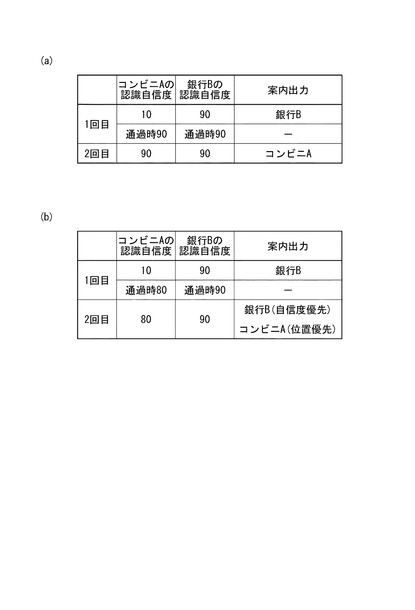
車両2が、交差点Cが案内地点である経路を設定して再度走行する場合の認識自信度を図7に基づいて説明する。
図7(a)に示すように、トリガ地点P1を1回目に通過したときにおける認識自信度は、コンビニAが10%であり、銀行Bが90%であったものとすると、交差点Cは、銀行Bを用いて案内される。また、1回目に交差点Cを通過したとき、コンビニAの認識自信度が10%から90%に向上しているので(S119:NO、S120:YES)、トリガ地点P1にて取得された周辺画像に基づくコンビニAの対象画像gpが新規テンプレートとして認識テンプレート記憶部40に格納される(S121)。
【0046】
トリガ地点P1を1回目に通過したときの対象画像gpが新規テンプレートとして認識テンプレート記憶部40に記憶されているので、車両2が再度トリガ地点P1を通過するとき、新規テンプレートとして追加されている対象画像gpを用いて画像認識することにより、トリガ地点P1にて取得された周辺画像におけるコンビニAの認識自信度が90%となり、目印対象物と一致すると判定される。車両2がトリガ地点P1を再度通過するとき、トリガ地点P1にてコンビニAが認識できているので(S113:YES)、「この先、コンビニAのある交差点Cを左折です」といった具合に、目印対象物の位置に基づいて設定される優先度に基づき、銀行Bよりも優先度の高い位置にあるコンビニAを用いた案内を行うことができる。また、他の地点において、類似の状況で遮蔽物によりコンビニAの一部が隠されている場合にも、新規テンプレートとして追加された対象画像gpを用いて画像認識を行うことにより。案内地点から離れた地点からの認識自信度が向上する。
【0047】
なお、銀行Bについては、1回目にトリガ地点P1にて取得された周辺画像における認識自信度が高く、目印対象物と一致すると判定されているので(S119:YES)、新規テンプレートの追加更新は行われない。
【0048】
また、図7(b)に示すように、トリガ地点P1における認識自信度が目印対象物によって異なる場合、目印対象物の位置に基づいて設定される優先度が最も高いコンビニAを用いた案内を行うように構成してもよいし、認識自信度が最も高い銀行Bを用いて案内を行うように構成してもよい。
【0049】
以上詳述したように、本実施形態では、設定された経路上の案内地点の目印となる目印対象物を特定し(図2中のS102)、車両2の周辺画像を取得する(S106)。また、目印対象物の画像認識に係る認識テンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する(S108)。また、トリガ地点にて取得された周辺画像に基づく認識自信度と比較し、トリガ地点と案内地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断し、認識自信度が向上したと判断された場合(図3中のS120:YES)、トリガ地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する(S121)。
【0050】
これにより、目印対象物に近づくことにより認識自信度が向上した目印対象物について、認識自信度が低かったときの画像が新規テンプレートとして追加されるので、例えば同一地点を再度通過した場合等、同じ目印対象物を認識する場合、新規テンプレートに基づいて目印対象物を認識できる可能性が高まり、目印対象物の認識精度が向上する。
【0051】
また、認識自信度に基づき、トリガ地点にて目印対象物が認識できたと判断された場合(S113:YES)、目印対象物を用いて案内地点を案内する(S115)。これにより、目印対象物を用いて案内すべき地点を適切に案内することができる。
【0052】
本実施形態では、トリガ地点にて目印対象物が認識できなかったと判断された場合であって(S119:NO)、認識自信度が向上したと判断された場合(S120:YES)、トリガ地点にて取得された周辺画像に基づく目印対象物の画像を新規テンプレートとして格納する(S121)。これにより、トリガ地点で認識できなかった目印対象物をトリガ地点にて認識できる可能性が高まり、目印対象物の認識精度が向上する。また、トリガ地点にて目印対象物が認識できれば、当該目印対象物を用いた案内が可能となり、ユーザの利便性が向上する。さらにまた本実施形態では、トリガ地点にて目印対象物が認識できたと判断された場合(S119:YES)、新規テンプレートの追加更新を行わない。トリガ地点にて目印対象物が認識できていた場合には、敢えて新規テンプレートを追加する必要がないので、新規テンプレートの追加に伴うメモリ等の利用量の増加を抑制することができる。
【0053】
また、案内すべき地点に複数の目印対象物があり、複数の目印対象物が認識できたと判断された場合、案内地点における目印対象物の位置に基づいて設定される優先度が最も高い目印対象物を用いて案内地点を案内する。これにより、ユーザにより認識しやすい位置にある目印対象物を用いて案内地点をより適切に案内することができる。
【0054】
なお、図7(b)にて説明した通り、案内すべき地点に複数の目印対象物があり、複数の目印対象物が認識できたと判断された場合、トリガ地点における認識自信度が最も高い目印対象物を用いて案内すべき地点を案内するようにしてもよい。これにより、ユーザにより視認されている可能性の高い目印対象物を用いて案内地点をより適切に案内することができる。
【0055】
本実施形態では、制御部10が「目印対象物特定手段」、「画像取得手段」、「認識自信度算出手段」、「向上判断手段」、「格納手段」、「認識判断手段」、および、「案内手段」を構成する。また、図2中のS102が「目印対象物特定手段」の機能としての処理に相当し、S106が「画像取得手段」の機能としての処理に相当し、図3中のS120が「向上判断手段」の機能としての処理に相当し、S121が「格納手段」の機能としての処理に相当する。また、S113またはS119が「認識判断手段」の機能としての処理に相当し、S115が「案内手段」の機能としての処理に相当する。
【0056】
(他の実施形態)
上記実施形態では、トリガ地点にて取得された対象画像が目印対象物と一致しない場合であって、認識自信度が向上した場合、トリガ地点にて取得された対象画像を新規テンプレートとして格納した。他の実施形態では、図3中のS119に係る処理を省略し、トリガ地点において取得された周辺画像に基づく対象画像が目印対象物と一致するか否かに関わらず、トリガ地点と案内地点との間で認識自信度が向上した目印対象物の対象画像を新規テンプレートとして格納するようにしてもよい。
また、上記実施形態では、S120にて、認識自信度が所定の閾値より高かった場合に認識自信度が向上したと判断した。他の実施形態では、認識自信度が所定の閾値より高いか否かに関わらず、トリガ地点にて取得された周辺画像に基づく認識自信度と比較し、トリガ地点と案内地点との間にて取得された周辺画像に基づく認識自信度が高かった場合、新規テンプレートを格納するようにしてもよい。
【0057】
上記実施形態では、制御部10が「目印対象物特定手段」、「画像取得手段」、「認識自信度算出手段」、「向上判断手段」、「格納手段」、「認識判断手段」、および、「案内手段」を構成していた。他の実施形態では、これらの手段としてコンピュータを機能させるプログラムであってもよいし、当該プログラムを記憶する記憶媒体であってもよい。また、「目印対象物特定段階」、「画像取得段階」、「認識自信度算出段階」、「向上判断段階」、「格納段階」、「認識判断段階」、および、「案内段階」として処理を行うナビゲーション方法であってもよい。
以上、本発明は、上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない範囲において種々の形態で実施可能である。
【符号の説明】
【0058】
1・・・車載器(案内装置)
2・・・車両
10・・・制御部(目印対象物特定手段、画像取得手段、認識自信度算出手段、向上判断手段、格納手段、認識判断手段、案内手段)
20・・・位置検出器
21・・・地磁気センサ
22・・・ジャイロスコープ
23・・・距離センサ
24・・・GPS受信機
30・・・地図データ記憶部
40・・・認識テンプレート記憶部
50・・・操作スイッチ群
60・・・ディスプレイ
70・・・スピーカ
80・・・情報記憶部
85・・・カメラ
【技術分野】
【0001】
本発明は、案内装置、案内方法、および、案内プログラムに関する。
【背景技術】
【0002】
従来、例えばカメラ等を用いて車両周辺の地物を撮像し、撮像された画像の画像認識を行うことが公知である。また、車両前方画像から検出された特徴物のうち、ドライバが認識している特徴物のみを用い、ドライバにとって最適な経路案内情報を生成することが公知である(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−5668号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、案内すべき地点にある特徴物について、案内すべき地点付近では特徴物を認識可能であっても、案内すべき地点から離れた地点において、例えば電柱や街路樹等の遮蔽物があり特徴物の一部が隠れてしまっている場合、案内すべき地点から離れた地点から特徴物を認識できない場合がある。
本発明は、上述の課題に鑑みてなされたものであり、その目的は、目印対象物の認識精度を向上可能な案内装置、案内方法、および、案内プログラムを提供することにある。
【課題を解決するための手段】
【0005】
請求項1に記載のナビゲーション装置は、設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定手段と、車両の周辺画像を取得する画像取得手段と、目印対象物の画像認識に係るテンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出手段と、案内すべき地点の手前であって案内すべき地点の案内の実施に係る案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内すべき地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断する向上判断手段と、向上判断手段において認識自信度が向上したと判断された場合、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する格納手段と、を備える。
【0006】
これにより、目印対象物に近づくことにより認識自信度が向上した目印対象物について、認識自信度が低かったときの画像が新規テンプレートとして追加されるので、例えば同一地点を再度通過した場合等、同じ目印対象物を認識する場合、新規テンプレートに基づいて目印対象物を認識できる可能性が高まり、目印対象物の認識精度が向上する。
【0007】
請求項2に記載の発明では、認識自信度に基づき、案内実施地点において目印対象物が認識できたか否かを判断する認識判断手段と、認識判断手段により目印対象物が認識できたと判断された場合、目印対象物を用いて案内すべき地点を案内する案内手段と、を備える。これにより、目印対象物を用いて案内すべき地点を適切に案内することができる。
【0008】
請求項3に記載の発明では、格納手段は、認識判断手段により案内実施地点において目印対象物が認識できなかったと判断された場合、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を新規テンプレートとして格納する。これにより、案内実施地点で認識できなかった目印対象物を案内実施地点にて認識できる可能性が高まり、目印対象物の認識精度が向上する。
【0009】
請求項4に記載の発明では、案内手段は、案内すべき地点に複数の目印対象物があり、認識判断手段により複数の目印対象物が認識できたと判断された場合、案内実施地点における認識自信度が最も高い目印対象物を用いて案内すべき地点を案内する。これにより、目印対象物を用いて案内すべき地点をより適切に案内することができる。
【0010】
請求項5に記載の発明では、案内手段は、案内すべき地点に複数の目印対象物があり、認識判断手段により複数の目印対象物が認識できたと判断された場合、案内すべき地点における目印対象物の位置に基づいて設定される優先度が最も高い目印対象物を用いて案内すべき地点を案内する。これにより、目印対象物を用いて案内すべき地点をより適切に案内することができる。
【0011】
請求項6に記載の案内方法は、設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定段階と、車両の周辺画像を取得する画像取得段階と、目印対象物の画像認識に係るテンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出段階と、案内すべき地点の手前であって案内すべき地点の案内の実施に係る案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内すべき地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断する向上判断段階と、向上判断段階において認識自信度が向上したと判断された場合、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する格納段階と、を備える。
これにより、請求項1に記載の案内装置と同様の効果を奏する。
【0012】
請求項7に記載の案内プログラムは、設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定手段、車両の周辺画像を取得する画像取得手段、目印対象物の画像認識に係るテンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出手段、案内すべき地点の手前であって案内すべき地点の案内の実施に係る案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内すべき地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断する向上判断手段、および、向上判断手段において認識自信度が向上したと判断された場合、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する格納手段、としてコンピュータを機能させる。
これにより、請求項1に記載の案内装置と同様の効果を奏する。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態の案内装置の構成を示すブロック図である。
【図2】本発明の一実施形態による案内処理を説明するフローチャートである。
【図3】本発明の一実施形態による案内処理を説明するフローチャートである。
【図4】本発明の一実施形態による認識テンプレートの更新を説明する説明図である。
【図5】本発明の一実施形態による対象画像を説明する説明図である。
【図6】本発明の一実施形態による交差点Cまでの距離と認識自信度とを説明する説明図である。
【図7】本発明の一実施形態によるトリガ地点を再度通過するときの認識自信度を説明する説明図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態による案内装置を図面に基づいて説明する。
(一実施形態)
図1に示すように、案内装置としての車載器1は、車両2に搭載されている。
車載器1は、所謂車載用ナビゲーション装置であるが、例えば携帯電話やパソコン等、車載用ナビゲーション装置に限らない。車載器1は、制御部10を中心に構成されており、制御部10に接続される位置検出器20、地図データ記憶部30、認識テンプレート記憶部40、操作スイッチ群50、ディスプレイ60、スピーカ70、および情報記憶部80等を備えている。
【0015】
制御部10は、通常のコンピュータとして構成されており、内部には、CPU、ROM、RAM、I/O、および、これらの構成を接続するバスライン等を有している。
位置検出器20は、いずれも周知の地磁気センサ21、ジャイロスコープ22、距離センサ23、および、衛星からの電波を受信するGPS(Global Positioning System)受信機24等を有している。これらのセンサ等21〜24は、各々が性質の異なる誤差を持っているため、相互に補完しながら使用される。
【0016】
地図データ記憶部30は、例えばハードディスク装置(HDD)として実現される記憶装置である。なお、本実施形態ではHDDを用いたが、DVD−ROMやメモリカード等他の媒体を用いても差し支えない。地図データ記憶部30は、位置検出の精度向上のための所謂マップマッチング用データ、および、経路を探索するための地図データを記憶している。地図データには、各種データが含まれるが、その一つとして施設に関する施設情報が含まれる。施設情報は、具体的には施設を特定するIDと関連付けられて記憶されているPOI(Point Of Interest)情報である。POI情報には、施設名称、施設ID、位置座標、種別(ジャンル)、住所、電話番号を示す情報などが含まれる。また、地図データには、ノードに関するノードデータ、道路(リンク)に関するリンクデータ等が含まれる。各ノードには、ノードの案内に用いられる地物であるランドマークに関するランドマーク情報が関連づけて記憶されている。ランドマーク情報には、各ランドマークがノードに対して設置されている位置に関する情報が含まれる。なお、ランドマークは、例えばノード近傍の構造物、施設の看板、道路標識等である。
【0017】
認識テンプレート記憶部40は、地図データ記憶部30と同一のHDDで構成される。もちろん、メモリカード等の他の媒体を用いてもよい。認識テンプレート記憶部40には、ランドマークを画像認識するための認識テンプレートが記憶されている。この認識テンプレートが「画像認識に係るテンプレート」と対応している。なお、認識テンプレートは、画像データであってもよいし、特徴量データであってもよい。
【0018】
操作スイッチ群50は、ディスプレイ60と一体になったタッチスイッチもしくはメカニカルなスイッチやリモコン装置等で構成され、各種入力に使用される。
ディスプレイ60は、液晶などを用いて構成される画面を有するカラーディスプレイ装置である。ディスプレイ60を介して地図や施設情報などが表示される。スピーカ70は、音声を出力するためのものであり、例えば経路の案内等を音声で行う場合に使用される。
【0019】
情報記憶部80は、カメラ85により撮像された画像、および、目印対象物が認識できたか否かの判断に係る認識自信度等を記憶するためのものであり、地図データ記憶部30と同一のHDDで構成される。もちろん、メモリカード等の他の媒体を用いてもよい。
また、制御部10には、カメラ85が接続されている。カメラ85は、車両2の周辺の画像を撮像する。本実施形態のカメラ85は、車両2の前方の画像を撮像するフロントカメラである。
【0020】
本実施形態では、設定された経路上の案内すべき地点の目印となる目印対象物の認識精度を向上すべく、認識テンプレートの追加更新を行っている。
ここで、本実施形態による案内処理を図2および図3に示すフローチャートに基づいて説明する。なお、図2および図3に示す案内処理は、経路を設定して走行しているときに所定の間隔で実行される処理である。
【0021】
最初のステップS101(以下、「ステップ」を省略し、単に記号「S」で示す。)では、案内処理開始トリガがあるか否かを判断する。例えば、案内すべき地点(以下、「案内地点」という。)の所定距離(例えば200m)手前にて案内地点に係る案内を行う場合、各種処理に係る時間や発話時間等を考慮してさらに手前に設定される地点であるトリガ地点を通過したとき、案内処理開始トリガがあると判断する。案内地点は、例えば経路に従って走行した場合に右折または左折する交差点等である。案内開始トリガがないと判断された場合(S101:NO)、この判断処理を繰り返す。案内開始トリガがあると判断された場合(S101:YES)、S102へ移行する。
【0022】
S102では、地図データ記憶部30を参照し、案内地点の目印となる目印対象物を特定する。
S103では、案内地点の目印となる目印対象物があるか否かを判断する。目印対象物がないと判断された場合(S103:NO)、図3中のS116へ移行する。目印対象物があると判断された場合(S103:YES)、S104へ移行する。
【0023】
S104では、目印対象物の優先度付けを行う。目印対象物の優先度は、案内地点における目印対象物の位置やユーザの嗜好等に基づいて設定される。本実施形態では、目印対象物の位置に基づいて優先度が設定されるものとし、車両2が案内地点へ至る進行方向に対し、案内地点の手前側であって進行方向左側の優先度が最も高く、次いで案内地点の奥側であって進行方向左側、案内地点の手前側であって進行方向右側、案内地点の奥側であって進行方向右側の順とする。なお、案内地点における目印対象物が1つである場合、優先度付けは行わずに次のステップS105へ移行する。
【0024】
S105では、特定された目印対象物を画像認識するための認識テンプレートを認識テンプレート記憶部40から読み込む。なお、案内地点における目印対象物が複数ある場合には、目印対象物ごとに認識テンプレートを読み込む。
S106では、カメラ85により車両2の周辺画像を取得する。本実施形態では、車両2の前方の画像が周辺画像として取得される。また、周辺画像を取得した地点と案内地点との距離を取得する。
【0025】
S107〜S112の処理は、S104で設定された優先度が高い順に、目印対象物ごとに行われる。
S107では、S106にて取得された周辺画像において、画像認識を行う画像認識範囲を設定する。例えば、目印対象物が案内地点の奥側であって進行方向左側である場合、周辺画像の左上近傍の所定範囲を画像認識範囲として設定する、といった具合に、地図上の目印対象物の位置、カメラ85の画角、道路形状、車両挙動等に基づき、画像認識範囲を設定する。画像認識範囲を設定して画像認識を行うことにより、処理速度を向上することができる。
【0026】
S108では、S105にて読み込まれた認識テンプレートに基づき、S107にて設定された画像認識範囲の画像認識処理を行い、取得された周辺画像における目印対象物に係る画像である対象画像を特定し、当該対象画像について目印対象物が認識できたか否かの判断に係る認識自信度を算出する。本実施形態における認識自信度は、対象画像と認識テンプレートとをマッチング処理したときの類似率である。
【0027】
S109では、S108にて算出された認識自信度を情報記憶部80に記憶する。なお、認識自信度は、当該認識自信度の算出に用いた周辺画像が取得された地点と案内地点との距離と関連づけて記憶される。
S110では、認識自信度に基づき、今回取得された対象画像が目印対象物と一致するか否かを判定し、判定結果を認識自信度と関連づけて情報記憶部80に記憶する。なお、認識自信度が所定の閾値(例えば70%)以上である場合、目印対象物と一致したと判定し、判定結果として「一致」を示す旨の情報が記憶される。また、認識自信度が所定の閾値より小さい場合、目印対象物と一致していないと判定し、判定結果として「不一致」を示す旨の情報が記憶される。
【0028】
S111では、当該目印対象物と関連づけられた対象画像が情報記憶部80に記憶されているか否かを判断する。対象画像が記憶されている場合(S111:YES)、S112の処理を行わない。対象画像が記憶されていない場合(S111:NO)、S112へ移行する。
S112では、対象画像を目印対象物と関連づけて情報記憶部80に記憶する。なお、既に対象画像が記憶されている場合、すなわちS111にて肯定判断された場合、対象画像は記憶されない。したがって、本実施形態では、トリガ地点を通過後、最初の対象画像のみを記憶している。
【0029】
全ての目印対象物についてS107〜S112に係る処理が終了した後に移行する図3中のS113では、少なくとも1つの目印対象物が認識できたか否かを判断する。目印対象物が認識できたか否かの判断は、情報記憶部80に記憶されている一致判定結果に基づいて判断され、少なくとも1つの目印対象物について「一致」を示す旨の情報が記憶されている場合、目印対象物が認識できたと判断し、全ての目印対象物について「一致」を示す旨の情報が記憶されていない場合、目印対象物が認識できなかったと判断する。目印対象物が認識できなかったと判断された場合(S113:NO)、S116へ移行する。少なくとも1つの目印対象物が認識できたと判断された場合(S113:YES)、S114へ移行する。
【0030】
S114では、案内地点に係る案内(発話)済みか否かを判断する。案内地点に係る案内済みであると判断された場合(S114:YES)、S118へ移行する。案内地点に係る案内済みでないと判断された場合(S114:NO)、S115へ移行する。
【0031】
S115では、目印対象物により案内地点の案内を行う。例えば目印対象物がコンビニエンスストアA(以下、「コンビニA」という。)であり、案内地点を右折する場合、「この先、コンビニAのある交差点を右折です」といった具合に、スピーカ70を介して案内する。なお本実施形態では、複数の目印対象物が認識できている場合、認識できた目印対象物のうち、S104にて設定された優先度が最も高い目印対象物を用いて案内を行う。そして、図2中のS106へ戻る。
【0032】
案内地点に目印対象物がないと判断された場合(S103:NO)、または、目印対象物が認識できなかったと判断された場合(S113:NO)に移行するS116では、案内地点に係る案内(発話)済みか否かを判断する。案内地点に係る案内済みであると判断された場合(S116:YES)、S118へ移行する。案内地点に係る案内済みでないと判断された場合(S116:NO)、S117へ移行する。
【0033】
S117では、案内地点までの距離により案内地点の案内を行う。例えば200m先の案内地点を右折する場合、「この先、200m先の交差点を右折です」といった具合に、スピーカ70を介して案内する。そして、図2中のS106へ戻る。
【0034】
案内地点に係る案内済みであると判断された場合(S114:YES、または、S116:YES)に移行するS118では、車両2が案内地点を通過したか否かを判断する。案内地点を通過していないと判断された場合(S118:NO)、図2中のS106へ戻る。案内地点を通過したと判断された場合(S118:YES)、S119へ移行する。
【0035】
S119〜S121に係る処理は、目印対象物ごとに行われる。
S119では、トリガ地点にて取得された対象画像が目印対象物と一致すると判定されていたか否かを判断する。トリガ地点にて取得された対象画像が目印対象物と一致すると判定されていたと判断された場合(S119:YES)、S120およびS121の処理を行わない。トリガ地点にて取得された対象画像が目印対象物と一致しないと判定されていたと判断された場合(S119:NO)、S120へ移行する。
【0036】
S120では、情報記憶部80に記憶された認識自信度を参照し、案内地点に近づくことにより認識自信度が向上したか否かを判断する。本実施形態では、トリガ地点と案内地点との間にて取得された周辺画像に基づく認識自信度が所定の閾値より高かった場合、認識自信度が向上したと判断する。認識自信度が向上していないと判断された場合(S120:NO)、S121の処理を行わない。認識自信度が向上したと判断された場合(S120:YES)、S121へ移行する。
【0037】
S121では、情報記憶部80に記憶されている対象画像、すなわちトリガ地点にて取得された周辺画像に基づく目印対象物の画像である対象画像を、当該対象画像に関連づけられている目印対象物の新規テンプレートとして認識テンプレート記憶部40に格納する。これにより、認識テンプレート記憶部40に記憶されている認識テンプレートが追加更新される。なお、認識テンプレート記憶部40に格納される新規テンプレートは、認識テンプレート同様、画像データであってもよいし、特徴量データであってもよい。
【0038】
全ての目印対象物についてS119〜S121に係る処理が終了した後に移行するS122では、案内処理を終了する。このとき、情報記憶部80に記憶されている対象画像および認識自信度の履歴を削除する。
なお、本実施形態では、トリガ地点が「案内すべき地点の手前であって、案内すべき地点の案内の実施に係る案内実施地点」に対応するが、例えば案内地点に係る案内(発話)を開始する地点や、案内地点に係る案内(発話)が終了する地点を「案内実施地点」とみなしてもよい。
【0039】
ここで、本実施形態における案内処理の具体例を図4に基づいて説明する。
図4に示すように、車両2は、経路Rを設定して走行中であり、交差点Cにて左折する経路が設定されている。すなわち、交差点Cは案内地点である。また、交差点Cまでの距離が200mである発話地点P2にて発話が終了するように、その10m手前の地点がトリガ地点P1であるものとする。
【0040】
車両2がトリガ地点P1を通過すると(S101)、案内地点である交差点Cの目印となる目印対象物として、コンビニAの看板(以下、単に「コンビニA」という。)および銀行Bの看板(以下、単に「銀行B」という。)が取得される(S102、S103:YES)。交差点Cにおいて、交差点Cの左側手前の地点c1、左側奥の地点c2、右側手前の地点c3、右側奥の地点c4の順に優先度が高いものとすると、地点c2にあるコンビニAは、地点c4にある銀行Bよりも優先度が高いので、優先度は、コンビニA、銀行Bの順と優先度付けされる(S104)。また、コンビニAおよび銀行Bの認識テンプレートを認識テンプレート記憶部40から読み込む(S105)。さらにまた、トリガ地点P1における車両2の前方の画像を周辺画像として取得し(S106)、画像認識処理を行う。
【0041】
ここでは、コンビニAの画像認識処理について説明する。
トリガ地点P1にて取得された周辺画像における画像認識範囲を設定し(S107)、画像認識処理を行い、目印対象物に係る画像である対象画像gpを特定し、認識自信度を算出する(S108)。この例では、トリガ地点P1の位置にある車両2の前方に電柱等の遮蔽物Dがあり、対象画像gpは、図5(a)に示すように、コンビニAの看板の一部が隠れてしまっている。そのため、対象画像gpと認識テンプレートとに基づく画像認識処理により算出される認識自信度は10%であり(S108)、所定の閾値より低いので、目印対象物と一致しないと判定される(S110)。また、車両2がトリガ地点P1を通過した時点では、対象画像は記憶されていないので(S111:NO)、図6に示すように、交差点までの距離「210m」、「対象画像gp」、認識自信度「10%」、判定結果「不一致」を関連づけて情報記憶部80に記憶する(S109、S110、S112)。
なお、銀行Bについても同様の処理が行われる。
【0042】
また、トリガ地点P1にて取得された周辺画像について画像認識処理を行ったとき、銀行Bが交差点Cの目印対象物として認識できたとすると(S113:YES)、認識できた目印対象物である銀行Bを用い、「この先、銀行Bのある交差点Cを左折です」といった具合に交差点Cの案内を行う(S115)。なお、トリガ地点P1にて取得された周辺画像について画像認識処理を行ったとき、銀行Bが交差点Cの目印対象物としてできなかったとすると(S113:NO)、交差点Cまでの距離を用い、「この先、200m先の交差点Cを左折です」といった具合に交差点Cの案内を行う(S117)。
【0043】
車両2の現在位置が交差点Cまでの距離が50mの地点Qであるとき、車両2は、コンビニAの一部を隠していた遮蔽物Dを通過しているので、前方に遮蔽物がなくなり、対象画像gqは図5(b)に示す如くとなる。このように車両2と目印対象物であるコンビニAとの間に遮蔽物がない状態で取得された周辺画像に基づく対象画像gqと認識テンプレートとに基づいて画像認識処理を行うと、認識自信度は、90%と向上する(図6参照)。
【0044】
車両2が交差点Cを通過した後(S118:YES)、コンビニAについて、図6に示すコンビニAについての認識自信度および一致判定結果を参照すると、トリガ地点P1にて取得された対象画像gpの認識自信度が10%と所定の閾値よりも低く、トリガ地点P1と交差点Cの間の地点である地点Qにて取得された対象画像gqの認識自信度が90%と所定の閾値よりも高く、認識自信度が向上しているので(S119:NO、S120:YES)、トリガ地点P1において取得された画像であって、図5(a)に示す如く、遮蔽物によりコンビニAの看板の一部が隠されている画像である対象画像gpを、コンビニAの認識に係る新規テンプレートとして認識テンプレート記憶部40に格納する(S121)。
【0045】
車両2が、交差点Cが案内地点である経路を設定して再度走行する場合の認識自信度を図7に基づいて説明する。
図7(a)に示すように、トリガ地点P1を1回目に通過したときにおける認識自信度は、コンビニAが10%であり、銀行Bが90%であったものとすると、交差点Cは、銀行Bを用いて案内される。また、1回目に交差点Cを通過したとき、コンビニAの認識自信度が10%から90%に向上しているので(S119:NO、S120:YES)、トリガ地点P1にて取得された周辺画像に基づくコンビニAの対象画像gpが新規テンプレートとして認識テンプレート記憶部40に格納される(S121)。
【0046】
トリガ地点P1を1回目に通過したときの対象画像gpが新規テンプレートとして認識テンプレート記憶部40に記憶されているので、車両2が再度トリガ地点P1を通過するとき、新規テンプレートとして追加されている対象画像gpを用いて画像認識することにより、トリガ地点P1にて取得された周辺画像におけるコンビニAの認識自信度が90%となり、目印対象物と一致すると判定される。車両2がトリガ地点P1を再度通過するとき、トリガ地点P1にてコンビニAが認識できているので(S113:YES)、「この先、コンビニAのある交差点Cを左折です」といった具合に、目印対象物の位置に基づいて設定される優先度に基づき、銀行Bよりも優先度の高い位置にあるコンビニAを用いた案内を行うことができる。また、他の地点において、類似の状況で遮蔽物によりコンビニAの一部が隠されている場合にも、新規テンプレートとして追加された対象画像gpを用いて画像認識を行うことにより。案内地点から離れた地点からの認識自信度が向上する。
【0047】
なお、銀行Bについては、1回目にトリガ地点P1にて取得された周辺画像における認識自信度が高く、目印対象物と一致すると判定されているので(S119:YES)、新規テンプレートの追加更新は行われない。
【0048】
また、図7(b)に示すように、トリガ地点P1における認識自信度が目印対象物によって異なる場合、目印対象物の位置に基づいて設定される優先度が最も高いコンビニAを用いた案内を行うように構成してもよいし、認識自信度が最も高い銀行Bを用いて案内を行うように構成してもよい。
【0049】
以上詳述したように、本実施形態では、設定された経路上の案内地点の目印となる目印対象物を特定し(図2中のS102)、車両2の周辺画像を取得する(S106)。また、目印対象物の画像認識に係る認識テンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する(S108)。また、トリガ地点にて取得された周辺画像に基づく認識自信度と比較し、トリガ地点と案内地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断し、認識自信度が向上したと判断された場合(図3中のS120:YES)、トリガ地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する(S121)。
【0050】
これにより、目印対象物に近づくことにより認識自信度が向上した目印対象物について、認識自信度が低かったときの画像が新規テンプレートとして追加されるので、例えば同一地点を再度通過した場合等、同じ目印対象物を認識する場合、新規テンプレートに基づいて目印対象物を認識できる可能性が高まり、目印対象物の認識精度が向上する。
【0051】
また、認識自信度に基づき、トリガ地点にて目印対象物が認識できたと判断された場合(S113:YES)、目印対象物を用いて案内地点を案内する(S115)。これにより、目印対象物を用いて案内すべき地点を適切に案内することができる。
【0052】
本実施形態では、トリガ地点にて目印対象物が認識できなかったと判断された場合であって(S119:NO)、認識自信度が向上したと判断された場合(S120:YES)、トリガ地点にて取得された周辺画像に基づく目印対象物の画像を新規テンプレートとして格納する(S121)。これにより、トリガ地点で認識できなかった目印対象物をトリガ地点にて認識できる可能性が高まり、目印対象物の認識精度が向上する。また、トリガ地点にて目印対象物が認識できれば、当該目印対象物を用いた案内が可能となり、ユーザの利便性が向上する。さらにまた本実施形態では、トリガ地点にて目印対象物が認識できたと判断された場合(S119:YES)、新規テンプレートの追加更新を行わない。トリガ地点にて目印対象物が認識できていた場合には、敢えて新規テンプレートを追加する必要がないので、新規テンプレートの追加に伴うメモリ等の利用量の増加を抑制することができる。
【0053】
また、案内すべき地点に複数の目印対象物があり、複数の目印対象物が認識できたと判断された場合、案内地点における目印対象物の位置に基づいて設定される優先度が最も高い目印対象物を用いて案内地点を案内する。これにより、ユーザにより認識しやすい位置にある目印対象物を用いて案内地点をより適切に案内することができる。
【0054】
なお、図7(b)にて説明した通り、案内すべき地点に複数の目印対象物があり、複数の目印対象物が認識できたと判断された場合、トリガ地点における認識自信度が最も高い目印対象物を用いて案内すべき地点を案内するようにしてもよい。これにより、ユーザにより視認されている可能性の高い目印対象物を用いて案内地点をより適切に案内することができる。
【0055】
本実施形態では、制御部10が「目印対象物特定手段」、「画像取得手段」、「認識自信度算出手段」、「向上判断手段」、「格納手段」、「認識判断手段」、および、「案内手段」を構成する。また、図2中のS102が「目印対象物特定手段」の機能としての処理に相当し、S106が「画像取得手段」の機能としての処理に相当し、図3中のS120が「向上判断手段」の機能としての処理に相当し、S121が「格納手段」の機能としての処理に相当する。また、S113またはS119が「認識判断手段」の機能としての処理に相当し、S115が「案内手段」の機能としての処理に相当する。
【0056】
(他の実施形態)
上記実施形態では、トリガ地点にて取得された対象画像が目印対象物と一致しない場合であって、認識自信度が向上した場合、トリガ地点にて取得された対象画像を新規テンプレートとして格納した。他の実施形態では、図3中のS119に係る処理を省略し、トリガ地点において取得された周辺画像に基づく対象画像が目印対象物と一致するか否かに関わらず、トリガ地点と案内地点との間で認識自信度が向上した目印対象物の対象画像を新規テンプレートとして格納するようにしてもよい。
また、上記実施形態では、S120にて、認識自信度が所定の閾値より高かった場合に認識自信度が向上したと判断した。他の実施形態では、認識自信度が所定の閾値より高いか否かに関わらず、トリガ地点にて取得された周辺画像に基づく認識自信度と比較し、トリガ地点と案内地点との間にて取得された周辺画像に基づく認識自信度が高かった場合、新規テンプレートを格納するようにしてもよい。
【0057】
上記実施形態では、制御部10が「目印対象物特定手段」、「画像取得手段」、「認識自信度算出手段」、「向上判断手段」、「格納手段」、「認識判断手段」、および、「案内手段」を構成していた。他の実施形態では、これらの手段としてコンピュータを機能させるプログラムであってもよいし、当該プログラムを記憶する記憶媒体であってもよい。また、「目印対象物特定段階」、「画像取得段階」、「認識自信度算出段階」、「向上判断段階」、「格納段階」、「認識判断段階」、および、「案内段階」として処理を行うナビゲーション方法であってもよい。
以上、本発明は、上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない範囲において種々の形態で実施可能である。
【符号の説明】
【0058】
1・・・車載器(案内装置)
2・・・車両
10・・・制御部(目印対象物特定手段、画像取得手段、認識自信度算出手段、向上判断手段、格納手段、認識判断手段、案内手段)
20・・・位置検出器
21・・・地磁気センサ
22・・・ジャイロスコープ
23・・・距離センサ
24・・・GPS受信機
30・・・地図データ記憶部
40・・・認識テンプレート記憶部
50・・・操作スイッチ群
60・・・ディスプレイ
70・・・スピーカ
80・・・情報記憶部
85・・・カメラ
【特許請求の範囲】
【請求項1】
設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定手段と、
車両の周辺画像を取得する画像取得手段と、
前記目印対象物の画像認識に係るテンプレートと前記周辺画像とに基づいて画像認識を行い、前記周辺画像において前記目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出手段と、
前記案内すべき地点の手前であって前記案内すべき地点の案内の実施に係る案内実施地点にて取得された前記周辺画像に基づく前記認識自信度と比較し、前記案内実施地点と前記案内すべき地点との間にて取得された前記周辺画像に基づく前記認識自信度が向上したか否かを判断する向上判断手段と、
前記向上判断手段において前記認識自信度が向上したと判断された場合、前記案内実施地点にて取得された前記周辺画像に基づく前記目印対象物の画像を前記目印対象物の画像認識に係る新規テンプレートとして格納する格納手段と、
を備えることを特徴とする案内装置。
【請求項2】
前記認識自信度に基づき、前記案内実施地点において前記目印対象物が認識できたか否かを判断する認識判断手段と、
前記認識判断手段により前記目印対象物が認識できたと判断された場合、前記目印対象物を用いて前記案内すべき地点を案内する案内手段と、
を備えることを特徴とする請求項1に記載の案内装置。
【請求項3】
前記格納手段は、前記認識判断手段により前記案内実施地点において前記目印対象物が認識できなかったと判断された場合、前記案内実施地点にて取得された前記周辺画像に基づく前記目印対象物の画像を前記新規テンプレートとして格納することを特徴とする請求項2に記載の案内装置。
【請求項4】
前記案内手段は、前記案内すべき地点に複数の前記目印対象物があり、前記認識判断手段により複数の前記目印対象物が認識できたと判断された場合、前記案内実施地点における前記認識自信度が最も高い前記目印対象物を用いて前記案内すべき地点を案内することを特徴とする請求項2または3に記載の案内装置。
【請求項5】
前記案内手段は、前記案内すべき地点に複数の前記目印対象物があり、前記認識判断手段により複数の前記目印対象物が認識できたと判断された場合、前記案内すべき地点における前記目印対象物の位置に基づいて設定される優先度が最も高い前記目印対象物を用いて前記案内すべき地点を案内することを特徴とする請求項2または3に記載の案内装置。
【請求項6】
設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定段階と、
車両の周辺画像を取得する画像取得段階と、
前記目印対象物の画像認識に係るテンプレートと前記周辺画像とに基づいて画像認識を行い、前記周辺画像において前記目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出段階と、
前記案内すべき地点の手前であって前記案内すべき地点の案内の実施に係る案内実施地点にて取得された前記周辺画像に基づく前記認識自信度と比較し、前記案内実施地点と前記案内すべき地点との間にて取得された前記周辺画像に基づく前記認識自信度が向上したか否かを判断する向上判断段階と、
前記向上判断段階において前記認識自信度が向上したと判断された場合、前記案内実施地点にて取得された前記周辺画像に基づく前記目印対象物の画像を前記目印対象物の画像認識に係る新規テンプレートとして格納する格納段階と、
を備えることを特徴とする案内方法。
【請求項7】
設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定手段、
車両の周辺画像を取得する画像取得手段、
前記目印対象物の画像認識に係るテンプレートと前記周辺画像とに基づいて画像認識を行い、前記周辺画像において前記目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出手段、
前記案内すべき地点の手前であって前記案内すべき地点の案内の実施に係る案内実施地点にて取得された前記周辺画像に基づく前記認識自信度と比較し、前記案内実施地点と前記案内すべき地点との間にて取得された前記周辺画像に基づく前記認識自信度が向上したか否かを判断する向上判断手段、
および、前記向上判断手段において前記認識自信度が向上したと判断された場合、前記案内実施地点にて取得された前記周辺画像に基づく前記目印対象物の画像を前記目印対象物の画像認識に係る新規テンプレートとして格納する格納手段、
としてコンピュータを機能させる案内プログラム。
【請求項1】
設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定手段と、
車両の周辺画像を取得する画像取得手段と、
前記目印対象物の画像認識に係るテンプレートと前記周辺画像とに基づいて画像認識を行い、前記周辺画像において前記目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出手段と、
前記案内すべき地点の手前であって前記案内すべき地点の案内の実施に係る案内実施地点にて取得された前記周辺画像に基づく前記認識自信度と比較し、前記案内実施地点と前記案内すべき地点との間にて取得された前記周辺画像に基づく前記認識自信度が向上したか否かを判断する向上判断手段と、
前記向上判断手段において前記認識自信度が向上したと判断された場合、前記案内実施地点にて取得された前記周辺画像に基づく前記目印対象物の画像を前記目印対象物の画像認識に係る新規テンプレートとして格納する格納手段と、
を備えることを特徴とする案内装置。
【請求項2】
前記認識自信度に基づき、前記案内実施地点において前記目印対象物が認識できたか否かを判断する認識判断手段と、
前記認識判断手段により前記目印対象物が認識できたと判断された場合、前記目印対象物を用いて前記案内すべき地点を案内する案内手段と、
を備えることを特徴とする請求項1に記載の案内装置。
【請求項3】
前記格納手段は、前記認識判断手段により前記案内実施地点において前記目印対象物が認識できなかったと判断された場合、前記案内実施地点にて取得された前記周辺画像に基づく前記目印対象物の画像を前記新規テンプレートとして格納することを特徴とする請求項2に記載の案内装置。
【請求項4】
前記案内手段は、前記案内すべき地点に複数の前記目印対象物があり、前記認識判断手段により複数の前記目印対象物が認識できたと判断された場合、前記案内実施地点における前記認識自信度が最も高い前記目印対象物を用いて前記案内すべき地点を案内することを特徴とする請求項2または3に記載の案内装置。
【請求項5】
前記案内手段は、前記案内すべき地点に複数の前記目印対象物があり、前記認識判断手段により複数の前記目印対象物が認識できたと判断された場合、前記案内すべき地点における前記目印対象物の位置に基づいて設定される優先度が最も高い前記目印対象物を用いて前記案内すべき地点を案内することを特徴とする請求項2または3に記載の案内装置。
【請求項6】
設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定段階と、
車両の周辺画像を取得する画像取得段階と、
前記目印対象物の画像認識に係るテンプレートと前記周辺画像とに基づいて画像認識を行い、前記周辺画像において前記目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出段階と、
前記案内すべき地点の手前であって前記案内すべき地点の案内の実施に係る案内実施地点にて取得された前記周辺画像に基づく前記認識自信度と比較し、前記案内実施地点と前記案内すべき地点との間にて取得された前記周辺画像に基づく前記認識自信度が向上したか否かを判断する向上判断段階と、
前記向上判断段階において前記認識自信度が向上したと判断された場合、前記案内実施地点にて取得された前記周辺画像に基づく前記目印対象物の画像を前記目印対象物の画像認識に係る新規テンプレートとして格納する格納段階と、
を備えることを特徴とする案内方法。
【請求項7】
設定された経路上の案内すべき地点の目印となる目印対象物を特定する目印対象物特定手段、
車両の周辺画像を取得する画像取得手段、
前記目印対象物の画像認識に係るテンプレートと前記周辺画像とに基づいて画像認識を行い、前記周辺画像において前記目印対象物が認識できたか否かの判断に係る認識自信度を算出する認識自信度算出手段、
前記案内すべき地点の手前であって前記案内すべき地点の案内の実施に係る案内実施地点にて取得された前記周辺画像に基づく前記認識自信度と比較し、前記案内実施地点と前記案内すべき地点との間にて取得された前記周辺画像に基づく前記認識自信度が向上したか否かを判断する向上判断手段、
および、前記向上判断手段において前記認識自信度が向上したと判断された場合、前記案内実施地点にて取得された前記周辺画像に基づく前記目印対象物の画像を前記目印対象物の画像認識に係る新規テンプレートとして格納する格納手段、
としてコンピュータを機能させる案内プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−168114(P2012−168114A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−31027(P2011−31027)
【出願日】平成23年2月16日(2011.2.16)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月16日(2011.2.16)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]