
案内装置、案内方法、案内プログラムおよび案内プログラムを格納した記録媒体
【課題】道路情報を用いずに目的地へ案内することができ、ユーザにとって目的地に到達するまでの行動の自由度を高めることができる案内装置、案内方法、案内プログラムおよび案内プログラムを格納した記録媒体を提供する。
【解決手段】許容範囲設定部から、目的地8bと現在地および進行方向8aとを結ぶ線である目的地方向8cを中心とした角度θの範囲で設定される許容範囲8eと、その許容範囲8e外であると判断したことを維持した時間の閾値である時間閾値および許容範囲8e外であると判断したことを維持した距離の閾値である距離閾値と、を設定し、許容範囲8e外を移動し続けた時間や距離を計測して、その時間または距離が時間閾値または距離閾値のうち少なくともいずれか一方を超えたと判定部が判定した場合に進行方向が目的地8bの方向を外れていることを表示部やスピーカを用いて報知する。
【解決手段】許容範囲設定部から、目的地8bと現在地および進行方向8aとを結ぶ線である目的地方向8cを中心とした角度θの範囲で設定される許容範囲8eと、その許容範囲8e外であると判断したことを維持した時間の閾値である時間閾値および許容範囲8e外であると判断したことを維持した距離の閾値である距離閾値と、を設定し、許容範囲8e外を移動し続けた時間や距離を計測して、その時間または距離が時間閾値または距離閾値のうち少なくともいずれか一方を超えたと判定部が判定した場合に進行方向が目的地8bの方向を外れていることを表示部やスピーカを用いて報知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在地と進行方向と目的地とを表示して目的地への案内をする案内装置、案内方法、案内プログラムおよび案内プログラムを格納した記録媒体に関する。
【背景技術】
【0002】
例えば、従来のカーナビゲーション装置などでは、目的地を設定し、目的地への地図上の経路を探索して、その探索された経路を誘導することで目的地への案内を行っている(例えば、特許文献1を参照)。
【0003】
また、特許文献2に記載の電子方位計のように、経路の案内は行わずに目標方位を設定し、検出した現在方位と比較して、目標方位から外れている場合に報知を行うことも提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−145262号公報
【特許文献2】特開平5−312574号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載された従来のカーナビゲーション装置などでは、ユーザは、その経路に示された道路を走行するように案内されるため、誤って経路に無い道路を走行した場合には、経路の再探索が発生し、煩わしく感じることや、経路を逸れたことによる不安を覚えることもあった。また、観光などで目的地以外の施設等に寄り道をするなど単に目的地に向かうだけが目的で無い場合、従来のカーナビゲーション装置などでは予め経由地などを設定しなければならず、ユーザにとって目的地に到達するまでの行動の自由度が低いという問題があった。
【0006】
また、特許文献2の場合は、設定した方位との比較のみであり、進行により現在地と目的地との方位が変化しても追従できない。また、目的地の方位が設定されるのみであり、座標位置が設定されないので、目的地に着いたか否かまでは判別できず、目的地に着いたか否かの判断は別の手段若しくはユーザ自らが行う必要があるという問題があった。
【0007】
そこで、本発明は、例えば、道路情報を用いずに目的地へ案内することができ、ユーザにとって目的地に到達するまでの行動の自由度を高めることができる案内装置、案内方法、案内プログラムおよび案内プログラムを格納した記録媒体を提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、請求項1に記載の案内装置は、移動体の目的地および現在地に関する情報を取得する取得手段と、前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断手段と、前記判断手段が前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測手段と、前記計測手段で計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知手段と、前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更手段と、を備えていることを特徴としている。
【0009】
請求項9に記載の案内方法は、移動体の目的地および現在地に関する情報を取得する取得ステップと、前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断ステップと、前記判断ステップにおいて前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測ステップと、前記計測ステップにおいて計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知ステップと、前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更ステップと、を備えていることを特徴としている。
【0010】
請求項10に記載の案内プログラムは、移動体の目的地および現在地に関する情報を取得する取得手段と、前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断手段と、前記判断手段が前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測手段と、前記計測手段で計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知手段と、前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更手段と、してコンピュータを機能させることを特徴としている。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施例にかかる案内装置のブロック図である。
【図2】図1に示された案内装置の表示部の表示についての説明図である。
【図3】図1に示された案内装置の報知動作のフローチャートである。
【図4】図1に示された案内装置の許容範囲と、時間閾値および距離閾値の変更動作のフローチャートである。
【図5】本発明の第2の実施例にかかる案内装置のブロック図である。
【図6】図5に示された案内装置の許容範囲と、時間閾値および距離閾値の変更動作のフローチャートである。
【図7】本発明の他の実施例にかかる説明図である。
【発明を実施するための形態】
【0012】
以下、本発明の一実施形態にかかる案内装置を説明する。本発明の一実施形態にかかる案内装置は、取得手段で、移動体の目的地および現在地に関する情報を取得し、判断手段で、移動体の進行方向が、目的地と現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断し、計測手段で、判断手段が許容範囲の外であると判断した状態を維持したまま移動体が移動する移動時間または移動距離を計測して、報知手段で、計測手段で計測された移動時間が所定の時間の閾値を超えた場合、または、移動距離が所定の距離の閾値を超えた場合に、進行方向に関する報知を行うとともに、変更手段が、現在地から目的地までの残距離に応じて時間の閾値または距離の閾値を変更するので、時間の閾値と距離の閾値を設定して報知することによって、ユーザが表示手段を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲内と許容範囲外とを頻繁に跨ぐ場合に、報知が頻発することを避けることができる。また、許容範囲と、時間の閾値および距離の閾値を目的地までの残距離に基づいて変化させることによって、経路はユーザが自由に選択しつつ確実に目的地へ近づくように案内することができる。したがって、道路情報を用いずに目的地へ案内することができ、ユーザにとって目的地に到達するまでの行動の自由度を高めることができる。
【0013】
また、目的地への到着予定時間を設定する到着予定時間設定手段を備え、変更手段が、到着予定時間から算出された到着予定時間までの残時間に基づいて、許容範囲と、時間の閾値および距離の閾値と、を変更してもよい。このようにすることにより、残距離だけでなく目的地への到着予定時間までの残時間によっても目的地へ近づくように案内することができる。
【0014】
また、変更手段が、目的地までの残距離が短くなるに従って、許容範囲の角度、時間の閾値、距離の閾値のうち少なくともいずれか1つを小さくするように変更してもよい。このようにすることにより、目的地へ近づくに従って確実に目的地へ案内することができる。
【0015】
また、変更手段が、目的地までの残時間が短くなるに従って、目的地と許容範囲の角度、時間の閾値、距離の閾値のうち少なくともいずれか1つを小さくするように変更してもよい。このようにすることにより、到着予定時間に近づくに従って確実に目的地へ案内することができる。
【0016】
また、変更手段が、残距離が所定距離以内であって、かつ、残時間が所定時間以上である場合は、許容範囲の角度、時間の閾値、距離の閾値のうち少なくともいずれか1つを大きくするように変更してもよい。このようにすることにより、目的地へ順調に近づき時間に余裕がある場合は行動範囲を広げることができる。
【0017】
また、変更手段が、残距離が所定距離以内または残時間が所定時間以内であって、かつ、残距離が増加した場合は、時間の閾値および距離の閾値を0に変更してもよい。このようにすることにより、目的地にある程度近づいた際に、残距離が増加した場合は、直ちに進行方向が目的地の方向と異なる状態にあること報知することができる。
【0018】
また、許容範囲設定手段が許容範囲内に進行方向が無いと判断した場合に、変更手段が、進行方向と目的地との角度に応じて時間の閾値および距離の閾値を変更してもよい。このようにすることにより、進行方向が目的地の方向と大きく異なる方向を向いていた場合には迅速に報知することができる。
【0019】
また、表示手段が、許容範囲内と許容範囲外とで異なる表示としてもよい。このようにすることにより、他の領域よりも目的地を含む許容範囲を目立つようにして、進行すべき方向を分かり易く表示することができる。
【0020】
また、本発明の一実施形態にかかる案内方法は、取得ステップで、移動体の目的地および現在地に関する情報を取得し、判断ステップで、移動体の進行方向が、目的地と現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断し、計測ステップで、判断ステップにおいて許容範囲の外であると判断した状態を維持したまま移動体が移動する移動時間または移動距離を計測して、報知ステップで、計測ステップで計測された移動時間が所定の時間の閾値を超えた場合、または、移動距離が所定の距離の閾値を超えた場合に、進行方向に関する報知を行うとともに、変更ステップでは、現在地から目的地までの残距離に応じて時間の閾値または距離の閾値を変更するので、時間の閾値と距離の閾値を設定して報知することによって、ユーザが表示手段を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲内と許容範囲外とを頻繁に跨ぐ場合に、報知が頻発することを避けることができる。また、許容範囲と、時間の閾値および距離の閾値を目的地までの残距離に基づいて変化させることによって、経路はユーザが自由に選択しつつ確実に目的地へ近づくように案内することができる。したがって、道路情報を用いずに目的地へ案内することができ、ユーザにとって目的地に到達するまでの行動の自由度を高めることができる。
【0021】
また、本発明の一実施形態にかかる案内プログラムは、取得手段で、移動体の目的地および現在地に関する情報を取得し、判断手段で、移動体の進行方向が、目的地と現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断し、計測手段で、判断手段が許容範囲の外であると判断した状態を維持したまま移動体が移動する移動時間または移動距離を計測して、報知手段で、計測手段で計測された移動時間が所定の時間の閾値を超えた場合、または、移動距離が所定の距離の閾値を超えた場合に、進行方向に関する報知を行うとともに、変更手段が、現在地から目的地までの残距離に応じて時間の閾値または距離の閾値を変更するので、時間の閾値と距離の閾値を設定して報知することによって、ユーザが表示手段を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲内と許容範囲外とを頻繁に跨ぐ場合に、報知が頻発することを避けることができる。また、許容範囲と、時間の閾値および距離の閾値を目的地までの残距離に基づいて変化させることによって、経路はユーザが自由に選択しつつ確実に目的地へ近づくように案内することができる。したがって、道路情報を用いずに目的地へ案内することができ、ユーザにとって目的地に到達するまでの行動の自由度を高めることができる。
【0022】
また、上述した案内プログラムをコンピュータ読み取り可能な記録媒体に格納してもよい。このようにすることにより、当該プログラムを機器に組み込む以外に単体でも流通させることができ、バージョンアップ等も容易に行える。
【実施例1】
【0023】
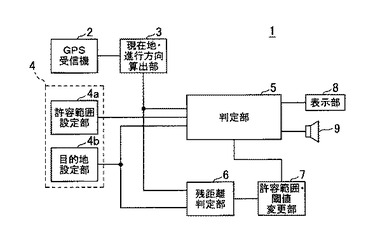
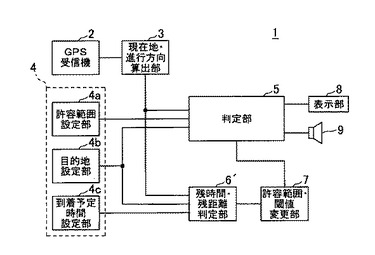
本発明の第1の実施例にかかる案内装置1を図1乃至図4を参照して説明する。案内装置1は図1に示すように、GPS受信機2と、現在地・進行方向算出部3と、操作部4と、判定部5と、残距離判定部6と、許容範囲・閾値変更部7と、表示部8と、スピーカ9と、を備えている。
【0024】
取得手段としてのGPS受信機2は、複数のGPS(Global Positioning System)衛星から、緯度及び経度情報等の測位用データを含む電波を定期的に受信して現在地・進行方向算出部3に出力する。なお、現在地を検出する手段としてはGPSに限らず、自立センサ(角速度センサ)などを用いてもよい。
【0025】
取得手段としての現在地・進行方向算出部3は、GPS受信機2が受信した測位用データから、現在地の座標(緯度、経度)を算出し、その現在地の座標と前に受信した測位用データによる現在位置の座標との差分から進行方向を算出して、現在地の座標および進行方向を判定部5および残距離判定部6へ出力する。
【0026】
操作部4は、複数のボタン等の入力手段で構成され、許容範囲設定部4aと、目的地設定部4bと、を備えている。
【0027】
許容範囲設定部4aは、後述する許容範囲の角度と、同様に後述する時間閾値および距離閾値を設定する。この許容範囲の角度と時間閾値および距離閾値の設定は、直接値を設定してもよいし、進行方向が目的地の方向と異なる状態にあることを報知するタイミングに合わせて「早め」「普通」「遅め」などの項目から選択するようにしてもよい。報知タイミングを「普通」とした場合は許容範囲の角度と時間閾値および距離閾値を予め判定部5などに設定されているデフォルト値とし、報知タイミングを「早め」とした場合は許容範囲の角度と時間閾値および距離閾値をデフォルト値よりも小さい値とし、報知タイミングを「遅め」とした場合は許容範囲の角度と時間閾値および距離閾値をデフォルト値よりも大きい値とする。また、許容範囲の角度と時間閾値および距離閾値の設定は、移動体に合わせて「歩行」「自転車」「自動車」などの項目から設定するようにしてもよい。この場合それぞれの移動手段の想定速度に合わせた値に設定される。
【0028】
取得手段としての目的地設定部4bは、目的地の座標を設定する。なお、目的地は、座標(緯度、経度)を直接入力してもよいし、予め施設名等を登録しておき、それを選択することで設定するようにしてもよいし、表示部8上に地図を表示させて、タッチパネルなどを用いて地図上で目的地を指し示すことにより設定するようにしてもよい。
【0029】
判断手段、計測手段、報知手段としての判定部5は、現在地・進行方向算出部3から入力される現在地の座標および進行方向と、操作部4で設定された許容範囲の角度および目的地の座標から進行方向が許容範囲の外(許容範囲の角度外)にあるか否かを判断し、許容範囲の外内である状態(許容範囲内にない状態)を維持した長さを時間および距離で計測して、その時間および距離が時間閾値または距離閾値を超えて維持した場合は、進行方向が目的地方向と異なる状態(目的地に向かっていない状態)であるとして後述する表示部8やスピーカ9に対して報知情報を出力する。即ち、進行方向に関する報知を行う。また、表示部8に対しては、前記報知をする/しないにかかわらず、目的地、進行方向、目的地方向、目的地までの距離、許容範囲および走行履歴等を表示させる。
【0030】
変更手段としての残距離判定部6は、現在地・進行方向算出部3から入力される現在地の座標と、目的地設定部4bで設定された目的地の座標と、から目的地までの距離(残距離)を算出して許容範囲・閾値変更部7へ出力する。
【0031】
変更手段としての許容範囲・閾値変更部7は、残距離判定部6で算出された残距離に応じて、許容範囲の角度および許容範囲外である状態が継続した時間の閾値である時間閾値と、許容範囲外である状態が継続した距離の閾値である距離閾値と、を変更するように判定部5へ指示する。
【0032】
表示手段、報知手段としての表示部8は、例えば液晶ディスプレイで構成され、判定部5から出力される目的地、進行方向、目的地方向、目的地までの距離、許容範囲および走行履歴などを表示するとともに、報知情報を表示する。報知情報は、例えば、進行方向が目的地方向と異なる状態(目的地に向かっていない状態)であることを示すメッセージ等の文字情報や目的地方向を示す矢印等の図形情報などで構成すればよい。また、これらの情報を点滅させてもよい。
【0033】
報知手段としてのスピーカ9は、判定部5から出力される報知情報を音声情報として出力する。また、報知情報以外に目的地や許容範囲を設定する際のガイダンス音声や操作時の確認音等を出力してもよい。
【0034】
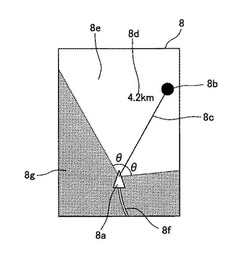
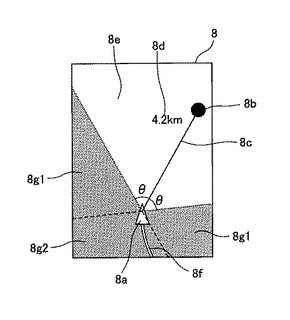
次に、上述した構成の目的地案内装置1の表示部8の表示について図2を参照して説明する。表示部8には、上述したように現在地および進行方向8a、目的地8b、目的地方向8c、目的地までの距離8d、許容範囲8eおよび走行履歴8fが表示されている。
【0035】
現在地および進行方向8aは、例えば二等辺三角形で表示され、表示部8の左右方向の略中央かつ上下方向の下方に表示されている。また、現在地および進行方向8aは、二等辺三角形の2つの等辺からなる頂点が進行方向を示している。目的地8bは、例えば丸形で表示され、目的地設定部4bで設定した座標位置に表示されている。目的地方向8cは、現在地および進行方向8aと目的地8bとを結ぶ線で表示され、現在地に対する目的地8bの方向を示す。目的地までの距離(残距離)8dは、目的地もしくは目的地方向8cの近傍に表示され、現在地から目的地8bまでの残りの直線距離を示している。
【0036】
許容範囲8eは、目的地方向8cを中心として±θ度の角度内の範囲を示している。許容範囲8eは、表示部8で表示される際に許容範囲以外の領域8gとは異なる表示としている。例えば、図2では、許容範囲8eを明るい表示として許容範囲以外の領域8gを暗い表示としている。走行履歴8fは、現在地および進行方向8aのこれまでの走行軌跡を表示している。
【0037】
なお、表示部8には、上述した現在地および進行方向8a、目的地8b、目的地方向8c、目的地までの距離8d、許容範囲8eおよび走行履歴8fおよび報知情報のみを表示してもよいし、地図を表示してその上に前記現在地および進行方向8a、目的地8b、目的地方向8c、目的地までの距離8d、許容範囲8eおよび走行履歴8fを重ねて表示するようにしてもよい。
【0038】
本実施例は、現在地および進行方向8aが許容範囲8e外(許容範囲以外の領域8g)を走行している時間や距離が前記した時間閾値または距離閾値を超えていた場合は、進行方向が目的地8bの方向と異なる状態にあることが報知される。つまり、許容範囲の外であると判断した状態を維持したまま本案内装置1を備えた移動体が移動する移動時間が所定の時間閾値を超えた場合、または、移動距離が所定の距離閾値を超えた場合に、進行方向に関する報知を行っている。
【0039】
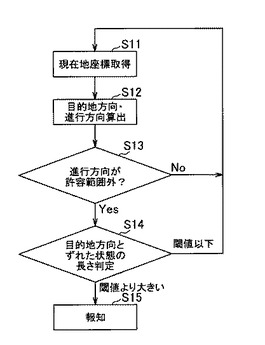
図3に、上述した構成の案内装置1の報知動作のフローチャートを示す。図3に示したフローチャートでは、まず、ステップS11において、現在地座標を取得してステップS12に進む。このステップでは、GPS受信機2がGPS衛星から測位用データを受信し、現在地・進行方向算出部3が現在値の緯度と経度の座標を算出することで取得して判定部5に出力する。
【0040】
次に、ステップS12において、目的地方向・進行方向を算出してステップS13に進む。このステップでは、現在地・進行方向算出部3が算出された現在地の座標と1つ前に算出された現在地の座標との差分から進行方向を算出して判定部5に出力し、判定部5で目的地設定部4bから設定された目的地の座標から目的地方向8cを算出する。
【0041】
次に、ステップS13において、進行方向が許容範囲8e外を向いているか否かを判断し、許容範囲8e外を向いている場合(Yesの場合)は、ステップS14に進み、許容範囲8e外を向いていない、つまり許容範囲8e内を向いている場合(Noの場合)はステップS11に戻る。
【0042】
次に、ステップS14において、目的地方向とずれた状態の長さを判定して、目的地方向とずれた状態の長さが閾値より大きい場合はステップS15に進み、閾値以下である場合はステップS11に戻る。本ステップでは、目的地方向とずれた状態、つまり、許容範囲以外の領域8gを連続して進行している状態が、時間閾値または距離閾値のいずれか一方を越えたか否かを判断部5で判断している。例えば、時間閾値が5分、距離閾値が1kmであった場合は、5分または1kmを超えて許容範囲8e外を走行した場合は目的地方向とずれた状態の長さが閾値より大きいと判断する。
【0043】
次に、ステップS15において、目的地方向とずれた状態の長さが閾値より大きいと判定されたので、判定部5が表示部8やスピーカ9に対して報知情報を出力してユーザに進行方向が目的地方向と異なる状態であることを報知する。
【0044】
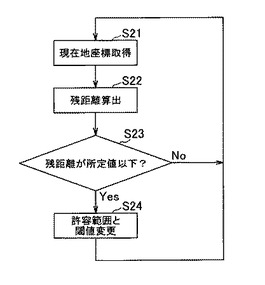
次に、上述した構成の案内装置1の許容範囲8eと、時間閾値および距離閾値の変更動作のフローチャートを図4に示す。まず、ステップS21において、現在地座標を取得してステップS22に進む。このステップは上述したステップS11と同様である。
【0045】
次に、ステップS22において、目的地までの残距離8dを算出してステップ23に進む。このステップでは、残距離判定部6が、現在地・進行方向算出部3から入力された現在地の座標と、目的地設定部4bから設定された目的地8bの座標と、から目的地までの残距離8dを算出している。
【0046】
次に、ステップS23において、ステップS22で算出した残距離8dが予め定めた所定値以下か否かを判断し、所定値以下である場合はステップS24に進み、所定値よりも大きい場合はステップS21に戻る。このステップでは、残距離判定部6が、ステップS22で算出した残距離が所定値以下か否を判定している。
【0047】
次に、ステップS24において、許容範囲8eの角度θと閾値(時間閾値、距離閾値)とを変更してステップS21に戻る。このステップでは、ステップS23の判定を受けて、許容範囲・閾値変更部7が、許容範囲8eの角度θと閾値(時間閾値、距離閾値)とを変更するように判定部5に指示している。そして、判定部5は、この変更された許容範囲8eの角度θと時間閾値、距離閾値を用いる。
【0048】
図3のフローチャートは、ステップS24からステップS21に戻ってループするので、残距離が少なくなるにしたがって許容範囲8eの角度θと、時間閾値および距離閾値の値を小さくする(許容範囲8eの角度θを狭くし、報知までの時間や距離を短くする)ことができる。そのため、ステップS23の所定値は、ループする度に残距離に応じて小さい値が設定されていく。
【0049】
なお、許容範囲8eの角度θと、時間閾値および距離閾値は全て変更しなくてもよく、例えば、許容範囲8eの角度θは変更して、時間閾値および距離閾値は変更しないようにしてもよいし、逆に、許容範囲8eの角度θを変更せずに、時間閾値および距離閾値を変更するようにしてもよい。また、残距離8dに応じてどのパラメータを変更するかを決めてもよい。要するに、許容範囲8eの角度θ、時間閾値、距離閾値のうち少なくともいずれか1つを小さくするように変更すればよい。
【0050】
本実施例によれば、許容範囲設定部4aから、目的地8bと現在地および進行方向8aとを結ぶ線である目的地方向8cを中心とした角度θの範囲で設定される許容範囲8eと、その許容範囲8e外であると判断したことを維持した時間の閾値である時間閾値および許容範囲8e外であると判断したことを維持した距離の閾値である距離閾値と、を設定し、許容範囲8e外を移動し続けた時間や距離を計測して、その時間または距離が時間閾値または距離閾値のうち少なくともいずれか一方を超えたと判定部5が判定した場合に進行方向が目的地8bの方向を外れていることを表示部8やスピーカ9を用いて報知するので、時間閾値と距離閾値を設定して報知することによって、ユーザが表示部8を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲8eの内と外を頻繁に跨ぐ場合に、報知が頻発することを避けることができる。
【0051】
また、許容範囲・閾値変更部7が、許容範囲8eと、時間閾値および距離閾値と、を残距離8dが少なくなるに従って小さくするように変化させるので、目的地8bへ近づくようにして確実に目的地8bに案内することができる。
【0052】
また、表示部8では、許容範囲8eを明るく表示し、許容範囲以外の領域8gを暗く表示しているので、目的地8bを含む許容範囲8eを目立つようにして、進行すべき方向を分かり易く表示することができる。
【実施例2】
【0053】
次に、本発明の第2の実施例にかかる案内装置1を図5および図6を参照して説明する。なお、前述した第1の実施例と同一部分には、同一符号を付して説明を省略する。
【0054】
本実施例では、操作部4に到着予定時間設定部4cが追加され、残距離判定部6が残時間・残距離判定部6´に変更になっている点が第1の実施例とは構成上異なる。
【0055】
到着予定時間設定手段としての到着予定時間設定部4cは、目的地8bへの到着予定時間を設定する。残時間・残距離判定部6´は、残距離判定部6の機能に加えて、時計機能を備え、到着予定時間設定部4cで設定された目的地8bへの到着予定時間に対する残り時間(残時間)を算出して、許容範囲・閾値変更部7へ出力する。
【0056】
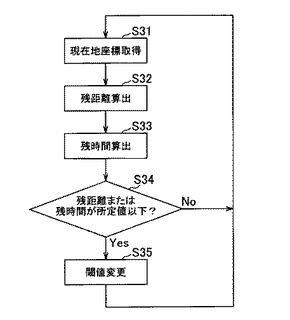
本実施例では、案内装置1の報知動作は図3に示したフローチャートと同様であるが、許容範囲8eと、時間閾値および距離閾値の変更動作が若干異なる。本実施例における許容範囲8eと、時間閾値および距離閾値の変更動作のフローチャートを図6に示す。図6に示したフローチャートのうち、ステップS31、S32は図4に示したフローチャートのステップS21、S22と同様である。
【0057】
ステップS32から進んだステップS33においては、目的地までの残時間を算出してステップS34に進む。このステップでは、残時間・残距離判定部6´が到着予定時間設定部4cから設定された目的地8bへの到着予定時間と、現在時刻から目的地8bへの到着予定時間に対する残時間を算出している。
【0058】
次に、ステップS34において、ステップS33で算出した残距離8dまたは残時間が予め定めた所定値以下か否かを判断し、所定値以下である場合はステップS35に進み、所定値よりも大きい場合はステップS31に戻る。このステップでは、残時間・残距離判定部6´が、ステップS32、S33で算出した残距離8dと残時間が所定値以下か否かを判定している。
【0059】
次に、ステップS35において、許容範囲8eの角度θと閾値(時間閾値、距離閾値)とを変更してステップS31に戻る。このステップでは、ステップS24の動作に加えて、残時間に応じても、許容範囲・閾値変更部7が、許容範囲8eの角度θと閾値(時間閾値、距離閾値)とを変更するように判定部5に指示している。
【0060】
なお、図6に示したフローチャートは、残距離も所定値以下か否か判断していたが、残時間のみを所定値以下か否か判断するようにしてもよい。
【0061】
また、ステップS35は、基本的には残距離や残時間が少なくなるにしたがって許容範囲8eの角度θと、時間閾値および距離閾値の値を小さくするが、残時間と残距離8dの関係によって許容範囲8eの角度θと、時間閾値および距離閾値の値を大きくしてもよい。例えば、順調に目的地8bに接近しており時間的に余裕がある場合は許容範囲8eの角度θを広げたり、時間閾値および距離閾値の値を大きくして自由に行動できる範囲を広げてもよい。この残時間と残距離8dの関係は、例えば、本案内装置1を備えている移動体の種類(歩行、自転車、自動車)に応じて適宜定めればよい。即ち、残距離が所定距離以内であって、かつ、残時間が所定時間以上である場合は、許容範囲の角度、時間の閾値、距離の閾値のうち少なくともいずれか1つを大きくするように変更している。
【0062】
本実施例によれば、目的地8bへの到着予定時間を設定する到着予定時間設定部4cを備え、許容範囲・閾値変更部7が、残時間・残距離判定部6´で算出された到着予定時間までの残時間が短くなるにしたがって、許容範囲8eの角度θと、時間閾値および距離閾値を小さくするように変化させているので、残距離8dだけでなく目的地8bへの到着予定時間までの残時間よっても目的地8bへ近づくように案内することができる。
【0063】
また、残距離8dが所定距離以内であって、かつ、残時間が所定時間以上である場合は、許容範囲8eの角度θ、時間閾値、距離閾値のうち少なくともいずれか1つを大きくするように変化させてもよいので、目的地8bへ順調に近づき時間に余裕がある場合は行動範囲を広げることができる。
【0064】
なお、目的地8bへの案内は、許容範囲8eの角度θ、時間閾値、距離閾値を小さくするだけでなく、目的地8bに予め定めた特定の距離以内または到着予定時間まで特定の時間以内まで接近した際に残距離8dが増加した場合は、時間閾値および距離閾値を0として直ちに進行方向が目的地方向と異なる状態であることを報知するようにしてもよい。このようにすることで、例えば目的地8bを通過してしまっても直ぐに報知することができる。即ち、残距離が所定距離以内または残時間が所定時間以内であって、かつ、残距離が増加した場合は、時間の閾値および距離の閾値を0に変更している。
【0065】
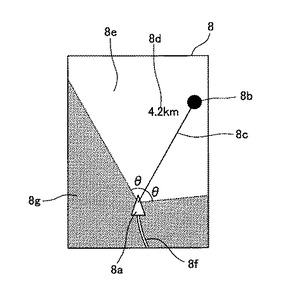
また、上述した2つの実施例では、時間閾値および距離閾値は残距離8dや残時間によって変化させていたが、図7に示すように、進行方向が目的地方向8cとどの程度ずれているかによって変化させてもよい。即ち、許容範囲8eの外に進行方向があると判断した場合に、許容範囲・閾値変更部7が、進行方向と、目的地方向8cとの角度に応じて時間の閾値および距離の閾値を変更している。
【0066】
例えば、図7において、許容範囲8eの角度θを目的地方向8cから±60°とし、許容範囲以外の領域8gのうち許容範囲8eに隣接する領域である目的地方向8cから+60°〜+120°の範囲と目的地方向8cから−60°〜−120°の範囲の領域8g1は、許容範囲8e外である状態が継続した時間の閾値である時間閾値を5分、許容範囲8e外である状態が継続した距離の閾値である距離閾値を1kmとして、残りの目的地方向8cから+120°〜+240°の領域8g2は、時間閾値を3分、距離閾値500mなどとして閾値を小さくすることで、目的地8bと全く異なる方向へ進行していた場合は迅速に報知することができる。つまり、許容範囲8eの角度θの絶対値が大きくなるに従って閾値を徐々に小さくしている。勿論、許容範囲8e以外の領域8gの分割条件は図7で示した2種類に限らずもっと細分化してもよい。
【0067】
また、上述した目的地案内装置1は、カーナビゲーション装置に限らず、自転車や歩行者用のナビゲーション装置などにも適用できる。
【0068】
また、上述した目的地案内装置1を許容範囲設定部4a、目的地設定部4b、到着予定時間設定部4c、判定部5、残距離判定部6(残時間・残距離判定部6´)、許容範囲変更部7をなどをコンピュータで動作するプログラムとして構成することで、本発明を目的地案内プログラムとして構成することができる。
【0069】
前述した実施例によれば、以下の案内装置1、案内方法および案内プログラムが得られる。
【0070】
(付記1)移動体の目的地8bおよび現在地に関する情報を取得するGPS受信機2、現在地・進行方向算出部3、目的地設定部4bと、
移動体の進行方向が、目的地8bと現在地とを結ぶ線を中心とした所定の角度である許容範囲8eの外であるか否か判断する判定部5と、
判定部5が許容範囲8eの外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する判定部5と、
判定部5で計測された移動時間が所定の時間閾値を超えた場合、または、移動距離が所定の距離閾値を超えた場合に、進行方向に関する報知を行なう判定部5、表示部8、スピーカ9と、
現在地から目的地8bまでの残距離に応じて時間閾値または距離閾値を変更する残距離判定部6、許容範囲・閾値変更部7と、
を備えていることを特徴とする案内装置1。
【0071】
(付記2)移動体の目的地8bおよび現在地に関する情報を取得するステップS11、S12と、
移動体の進行方向が、目的地8bと前記現在地とを結ぶ線を中心とした所定の角度である許容範囲8eの外であるか否か判断するステップS13と、
ステップS13において許容範囲8eの外であると判断した状態を維持したまま移動体が移動する移動時間または移動距離を計測するステップS14と、
ステップS14において計測された移動時間が所定の時間閾値を超えた場合、または、移動距離が所定の距離閾値を超えた場合に、進行方向に関する報知を行なうステップS15と、
現在地から目的地8bまでの残距離に応じて時間閾値または距離閾値を変更するステップS24と、
を備えていることを特徴とする案内方法。
【0072】
(付記3)移動体の目的地8bおよび現在地に関する情報を取得するGPS受信機2、現在地・進行方向算出部3、目的地設定部4bと、
移動体の進行方向が、目的地8bと現在地とを結ぶ線を中心とした所定の角度である許容範囲8eの外であるか否か判断する判定部5と、
判定部5が許容範囲8eの外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する判定部5と、
判定部5で計測された移動時間が所定の時間閾値を超えた場合、または、移動距離が所定の距離閾値を超えた場合に、進行方向に関する報知を行なう判定部5、表示部8、スピーカ9と、
現在地から目的地8bまでの残距離に応じて時間閾値または距離閾値を変更する残距離判定部6、許容範囲・閾値変更部7と、
してコンピュータに機能させることを特徴とする案内プログラム。
【0073】
これらの案内装置1、案内方法および案内プログラムによれば、時間閾値と距離閾値を設定して報知することによって、ユーザが表示部8を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲8eを頻繁に跨ぐ場合に、報知が頻発することを避けることができる。また、許容範囲8eと、時間閾値および距離閾値を目的地8bまでの残距離に基づいて変化させることによって、経路はユーザが自由に選択しつつ確実に目的地8bへ近づくように案内することができる。
【0074】
なお、前述した実施例は本発明の代表的な形態を示したに過ぎず、本発明は、実施例に限定されるものではない。すなわち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【符号の説明】
【0075】
1 案内装置
2 GPS受信機(取得手段)
3 現在地・進行方向算出部(取得手段)
4b 目的地設定部(取得手段)
4c 到着予定時間設定部(到着予定時間設定手段)
5 判定部(判断手段、計測手段、報知手段)
6 残距離判定部(変更手段)
6´ 残時間・残距離判定部(変更手段)
7 許容範囲・閾値変更部(変更手段)
8 表示部(表示手段、報知手段)
8a 現在地および進行方向
8b 目的地
8c 目的地方向(目的地と現在地とを結ぶ線)
8e 許容範囲
8g 許容範囲以外の領域(許容範囲の外)
9 スピーカ(報知手段)
θ 許容範囲の角度
S11 現在地座標取得(取得ステップ)
S12 目的地方向・進行方向算出(取得ステップ)
S13 進行方向が許容範囲外(判断ステップ)
S14 目的地方向とずれた状態の長さ判定(計測ステップ)
S15 報知(報知ステップ)
S24 許容範囲と閾値変更(変更ステップ)
【技術分野】
【0001】
本発明は、現在地と進行方向と目的地とを表示して目的地への案内をする案内装置、案内方法、案内プログラムおよび案内プログラムを格納した記録媒体に関する。
【背景技術】
【0002】
例えば、従来のカーナビゲーション装置などでは、目的地を設定し、目的地への地図上の経路を探索して、その探索された経路を誘導することで目的地への案内を行っている(例えば、特許文献1を参照)。
【0003】
また、特許文献2に記載の電子方位計のように、経路の案内は行わずに目標方位を設定し、検出した現在方位と比較して、目標方位から外れている場合に報知を行うことも提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−145262号公報
【特許文献2】特開平5−312574号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載された従来のカーナビゲーション装置などでは、ユーザは、その経路に示された道路を走行するように案内されるため、誤って経路に無い道路を走行した場合には、経路の再探索が発生し、煩わしく感じることや、経路を逸れたことによる不安を覚えることもあった。また、観光などで目的地以外の施設等に寄り道をするなど単に目的地に向かうだけが目的で無い場合、従来のカーナビゲーション装置などでは予め経由地などを設定しなければならず、ユーザにとって目的地に到達するまでの行動の自由度が低いという問題があった。
【0006】
また、特許文献2の場合は、設定した方位との比較のみであり、進行により現在地と目的地との方位が変化しても追従できない。また、目的地の方位が設定されるのみであり、座標位置が設定されないので、目的地に着いたか否かまでは判別できず、目的地に着いたか否かの判断は別の手段若しくはユーザ自らが行う必要があるという問題があった。
【0007】
そこで、本発明は、例えば、道路情報を用いずに目的地へ案内することができ、ユーザにとって目的地に到達するまでの行動の自由度を高めることができる案内装置、案内方法、案内プログラムおよび案内プログラムを格納した記録媒体を提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、請求項1に記載の案内装置は、移動体の目的地および現在地に関する情報を取得する取得手段と、前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断手段と、前記判断手段が前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測手段と、前記計測手段で計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知手段と、前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更手段と、を備えていることを特徴としている。
【0009】
請求項9に記載の案内方法は、移動体の目的地および現在地に関する情報を取得する取得ステップと、前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断ステップと、前記判断ステップにおいて前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測ステップと、前記計測ステップにおいて計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知ステップと、前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更ステップと、を備えていることを特徴としている。
【0010】
請求項10に記載の案内プログラムは、移動体の目的地および現在地に関する情報を取得する取得手段と、前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断手段と、前記判断手段が前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測手段と、前記計測手段で計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知手段と、前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更手段と、してコンピュータを機能させることを特徴としている。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施例にかかる案内装置のブロック図である。
【図2】図1に示された案内装置の表示部の表示についての説明図である。
【図3】図1に示された案内装置の報知動作のフローチャートである。
【図4】図1に示された案内装置の許容範囲と、時間閾値および距離閾値の変更動作のフローチャートである。
【図5】本発明の第2の実施例にかかる案内装置のブロック図である。
【図6】図5に示された案内装置の許容範囲と、時間閾値および距離閾値の変更動作のフローチャートである。
【図7】本発明の他の実施例にかかる説明図である。
【発明を実施するための形態】
【0012】
以下、本発明の一実施形態にかかる案内装置を説明する。本発明の一実施形態にかかる案内装置は、取得手段で、移動体の目的地および現在地に関する情報を取得し、判断手段で、移動体の進行方向が、目的地と現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断し、計測手段で、判断手段が許容範囲の外であると判断した状態を維持したまま移動体が移動する移動時間または移動距離を計測して、報知手段で、計測手段で計測された移動時間が所定の時間の閾値を超えた場合、または、移動距離が所定の距離の閾値を超えた場合に、進行方向に関する報知を行うとともに、変更手段が、現在地から目的地までの残距離に応じて時間の閾値または距離の閾値を変更するので、時間の閾値と距離の閾値を設定して報知することによって、ユーザが表示手段を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲内と許容範囲外とを頻繁に跨ぐ場合に、報知が頻発することを避けることができる。また、許容範囲と、時間の閾値および距離の閾値を目的地までの残距離に基づいて変化させることによって、経路はユーザが自由に選択しつつ確実に目的地へ近づくように案内することができる。したがって、道路情報を用いずに目的地へ案内することができ、ユーザにとって目的地に到達するまでの行動の自由度を高めることができる。
【0013】
また、目的地への到着予定時間を設定する到着予定時間設定手段を備え、変更手段が、到着予定時間から算出された到着予定時間までの残時間に基づいて、許容範囲と、時間の閾値および距離の閾値と、を変更してもよい。このようにすることにより、残距離だけでなく目的地への到着予定時間までの残時間によっても目的地へ近づくように案内することができる。
【0014】
また、変更手段が、目的地までの残距離が短くなるに従って、許容範囲の角度、時間の閾値、距離の閾値のうち少なくともいずれか1つを小さくするように変更してもよい。このようにすることにより、目的地へ近づくに従って確実に目的地へ案内することができる。
【0015】
また、変更手段が、目的地までの残時間が短くなるに従って、目的地と許容範囲の角度、時間の閾値、距離の閾値のうち少なくともいずれか1つを小さくするように変更してもよい。このようにすることにより、到着予定時間に近づくに従って確実に目的地へ案内することができる。
【0016】
また、変更手段が、残距離が所定距離以内であって、かつ、残時間が所定時間以上である場合は、許容範囲の角度、時間の閾値、距離の閾値のうち少なくともいずれか1つを大きくするように変更してもよい。このようにすることにより、目的地へ順調に近づき時間に余裕がある場合は行動範囲を広げることができる。
【0017】
また、変更手段が、残距離が所定距離以内または残時間が所定時間以内であって、かつ、残距離が増加した場合は、時間の閾値および距離の閾値を0に変更してもよい。このようにすることにより、目的地にある程度近づいた際に、残距離が増加した場合は、直ちに進行方向が目的地の方向と異なる状態にあること報知することができる。
【0018】
また、許容範囲設定手段が許容範囲内に進行方向が無いと判断した場合に、変更手段が、進行方向と目的地との角度に応じて時間の閾値および距離の閾値を変更してもよい。このようにすることにより、進行方向が目的地の方向と大きく異なる方向を向いていた場合には迅速に報知することができる。
【0019】
また、表示手段が、許容範囲内と許容範囲外とで異なる表示としてもよい。このようにすることにより、他の領域よりも目的地を含む許容範囲を目立つようにして、進行すべき方向を分かり易く表示することができる。
【0020】
また、本発明の一実施形態にかかる案内方法は、取得ステップで、移動体の目的地および現在地に関する情報を取得し、判断ステップで、移動体の進行方向が、目的地と現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断し、計測ステップで、判断ステップにおいて許容範囲の外であると判断した状態を維持したまま移動体が移動する移動時間または移動距離を計測して、報知ステップで、計測ステップで計測された移動時間が所定の時間の閾値を超えた場合、または、移動距離が所定の距離の閾値を超えた場合に、進行方向に関する報知を行うとともに、変更ステップでは、現在地から目的地までの残距離に応じて時間の閾値または距離の閾値を変更するので、時間の閾値と距離の閾値を設定して報知することによって、ユーザが表示手段を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲内と許容範囲外とを頻繁に跨ぐ場合に、報知が頻発することを避けることができる。また、許容範囲と、時間の閾値および距離の閾値を目的地までの残距離に基づいて変化させることによって、経路はユーザが自由に選択しつつ確実に目的地へ近づくように案内することができる。したがって、道路情報を用いずに目的地へ案内することができ、ユーザにとって目的地に到達するまでの行動の自由度を高めることができる。
【0021】
また、本発明の一実施形態にかかる案内プログラムは、取得手段で、移動体の目的地および現在地に関する情報を取得し、判断手段で、移動体の進行方向が、目的地と現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断し、計測手段で、判断手段が許容範囲の外であると判断した状態を維持したまま移動体が移動する移動時間または移動距離を計測して、報知手段で、計測手段で計測された移動時間が所定の時間の閾値を超えた場合、または、移動距離が所定の距離の閾値を超えた場合に、進行方向に関する報知を行うとともに、変更手段が、現在地から目的地までの残距離に応じて時間の閾値または距離の閾値を変更するので、時間の閾値と距離の閾値を設定して報知することによって、ユーザが表示手段を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲内と許容範囲外とを頻繁に跨ぐ場合に、報知が頻発することを避けることができる。また、許容範囲と、時間の閾値および距離の閾値を目的地までの残距離に基づいて変化させることによって、経路はユーザが自由に選択しつつ確実に目的地へ近づくように案内することができる。したがって、道路情報を用いずに目的地へ案内することができ、ユーザにとって目的地に到達するまでの行動の自由度を高めることができる。
【0022】
また、上述した案内プログラムをコンピュータ読み取り可能な記録媒体に格納してもよい。このようにすることにより、当該プログラムを機器に組み込む以外に単体でも流通させることができ、バージョンアップ等も容易に行える。
【実施例1】
【0023】
本発明の第1の実施例にかかる案内装置1を図1乃至図4を参照して説明する。案内装置1は図1に示すように、GPS受信機2と、現在地・進行方向算出部3と、操作部4と、判定部5と、残距離判定部6と、許容範囲・閾値変更部7と、表示部8と、スピーカ9と、を備えている。
【0024】
取得手段としてのGPS受信機2は、複数のGPS(Global Positioning System)衛星から、緯度及び経度情報等の測位用データを含む電波を定期的に受信して現在地・進行方向算出部3に出力する。なお、現在地を検出する手段としてはGPSに限らず、自立センサ(角速度センサ)などを用いてもよい。
【0025】
取得手段としての現在地・進行方向算出部3は、GPS受信機2が受信した測位用データから、現在地の座標(緯度、経度)を算出し、その現在地の座標と前に受信した測位用データによる現在位置の座標との差分から進行方向を算出して、現在地の座標および進行方向を判定部5および残距離判定部6へ出力する。
【0026】
操作部4は、複数のボタン等の入力手段で構成され、許容範囲設定部4aと、目的地設定部4bと、を備えている。
【0027】
許容範囲設定部4aは、後述する許容範囲の角度と、同様に後述する時間閾値および距離閾値を設定する。この許容範囲の角度と時間閾値および距離閾値の設定は、直接値を設定してもよいし、進行方向が目的地の方向と異なる状態にあることを報知するタイミングに合わせて「早め」「普通」「遅め」などの項目から選択するようにしてもよい。報知タイミングを「普通」とした場合は許容範囲の角度と時間閾値および距離閾値を予め判定部5などに設定されているデフォルト値とし、報知タイミングを「早め」とした場合は許容範囲の角度と時間閾値および距離閾値をデフォルト値よりも小さい値とし、報知タイミングを「遅め」とした場合は許容範囲の角度と時間閾値および距離閾値をデフォルト値よりも大きい値とする。また、許容範囲の角度と時間閾値および距離閾値の設定は、移動体に合わせて「歩行」「自転車」「自動車」などの項目から設定するようにしてもよい。この場合それぞれの移動手段の想定速度に合わせた値に設定される。
【0028】
取得手段としての目的地設定部4bは、目的地の座標を設定する。なお、目的地は、座標(緯度、経度)を直接入力してもよいし、予め施設名等を登録しておき、それを選択することで設定するようにしてもよいし、表示部8上に地図を表示させて、タッチパネルなどを用いて地図上で目的地を指し示すことにより設定するようにしてもよい。
【0029】
判断手段、計測手段、報知手段としての判定部5は、現在地・進行方向算出部3から入力される現在地の座標および進行方向と、操作部4で設定された許容範囲の角度および目的地の座標から進行方向が許容範囲の外(許容範囲の角度外)にあるか否かを判断し、許容範囲の外内である状態(許容範囲内にない状態)を維持した長さを時間および距離で計測して、その時間および距離が時間閾値または距離閾値を超えて維持した場合は、進行方向が目的地方向と異なる状態(目的地に向かっていない状態)であるとして後述する表示部8やスピーカ9に対して報知情報を出力する。即ち、進行方向に関する報知を行う。また、表示部8に対しては、前記報知をする/しないにかかわらず、目的地、進行方向、目的地方向、目的地までの距離、許容範囲および走行履歴等を表示させる。
【0030】
変更手段としての残距離判定部6は、現在地・進行方向算出部3から入力される現在地の座標と、目的地設定部4bで設定された目的地の座標と、から目的地までの距離(残距離)を算出して許容範囲・閾値変更部7へ出力する。
【0031】
変更手段としての許容範囲・閾値変更部7は、残距離判定部6で算出された残距離に応じて、許容範囲の角度および許容範囲外である状態が継続した時間の閾値である時間閾値と、許容範囲外である状態が継続した距離の閾値である距離閾値と、を変更するように判定部5へ指示する。
【0032】
表示手段、報知手段としての表示部8は、例えば液晶ディスプレイで構成され、判定部5から出力される目的地、進行方向、目的地方向、目的地までの距離、許容範囲および走行履歴などを表示するとともに、報知情報を表示する。報知情報は、例えば、進行方向が目的地方向と異なる状態(目的地に向かっていない状態)であることを示すメッセージ等の文字情報や目的地方向を示す矢印等の図形情報などで構成すればよい。また、これらの情報を点滅させてもよい。
【0033】
報知手段としてのスピーカ9は、判定部5から出力される報知情報を音声情報として出力する。また、報知情報以外に目的地や許容範囲を設定する際のガイダンス音声や操作時の確認音等を出力してもよい。
【0034】
次に、上述した構成の目的地案内装置1の表示部8の表示について図2を参照して説明する。表示部8には、上述したように現在地および進行方向8a、目的地8b、目的地方向8c、目的地までの距離8d、許容範囲8eおよび走行履歴8fが表示されている。
【0035】
現在地および進行方向8aは、例えば二等辺三角形で表示され、表示部8の左右方向の略中央かつ上下方向の下方に表示されている。また、現在地および進行方向8aは、二等辺三角形の2つの等辺からなる頂点が進行方向を示している。目的地8bは、例えば丸形で表示され、目的地設定部4bで設定した座標位置に表示されている。目的地方向8cは、現在地および進行方向8aと目的地8bとを結ぶ線で表示され、現在地に対する目的地8bの方向を示す。目的地までの距離(残距離)8dは、目的地もしくは目的地方向8cの近傍に表示され、現在地から目的地8bまでの残りの直線距離を示している。
【0036】
許容範囲8eは、目的地方向8cを中心として±θ度の角度内の範囲を示している。許容範囲8eは、表示部8で表示される際に許容範囲以外の領域8gとは異なる表示としている。例えば、図2では、許容範囲8eを明るい表示として許容範囲以外の領域8gを暗い表示としている。走行履歴8fは、現在地および進行方向8aのこれまでの走行軌跡を表示している。
【0037】
なお、表示部8には、上述した現在地および進行方向8a、目的地8b、目的地方向8c、目的地までの距離8d、許容範囲8eおよび走行履歴8fおよび報知情報のみを表示してもよいし、地図を表示してその上に前記現在地および進行方向8a、目的地8b、目的地方向8c、目的地までの距離8d、許容範囲8eおよび走行履歴8fを重ねて表示するようにしてもよい。
【0038】
本実施例は、現在地および進行方向8aが許容範囲8e外(許容範囲以外の領域8g)を走行している時間や距離が前記した時間閾値または距離閾値を超えていた場合は、進行方向が目的地8bの方向と異なる状態にあることが報知される。つまり、許容範囲の外であると判断した状態を維持したまま本案内装置1を備えた移動体が移動する移動時間が所定の時間閾値を超えた場合、または、移動距離が所定の距離閾値を超えた場合に、進行方向に関する報知を行っている。
【0039】
図3に、上述した構成の案内装置1の報知動作のフローチャートを示す。図3に示したフローチャートでは、まず、ステップS11において、現在地座標を取得してステップS12に進む。このステップでは、GPS受信機2がGPS衛星から測位用データを受信し、現在地・進行方向算出部3が現在値の緯度と経度の座標を算出することで取得して判定部5に出力する。
【0040】
次に、ステップS12において、目的地方向・進行方向を算出してステップS13に進む。このステップでは、現在地・進行方向算出部3が算出された現在地の座標と1つ前に算出された現在地の座標との差分から進行方向を算出して判定部5に出力し、判定部5で目的地設定部4bから設定された目的地の座標から目的地方向8cを算出する。
【0041】
次に、ステップS13において、進行方向が許容範囲8e外を向いているか否かを判断し、許容範囲8e外を向いている場合(Yesの場合)は、ステップS14に進み、許容範囲8e外を向いていない、つまり許容範囲8e内を向いている場合(Noの場合)はステップS11に戻る。
【0042】
次に、ステップS14において、目的地方向とずれた状態の長さを判定して、目的地方向とずれた状態の長さが閾値より大きい場合はステップS15に進み、閾値以下である場合はステップS11に戻る。本ステップでは、目的地方向とずれた状態、つまり、許容範囲以外の領域8gを連続して進行している状態が、時間閾値または距離閾値のいずれか一方を越えたか否かを判断部5で判断している。例えば、時間閾値が5分、距離閾値が1kmであった場合は、5分または1kmを超えて許容範囲8e外を走行した場合は目的地方向とずれた状態の長さが閾値より大きいと判断する。
【0043】
次に、ステップS15において、目的地方向とずれた状態の長さが閾値より大きいと判定されたので、判定部5が表示部8やスピーカ9に対して報知情報を出力してユーザに進行方向が目的地方向と異なる状態であることを報知する。
【0044】
次に、上述した構成の案内装置1の許容範囲8eと、時間閾値および距離閾値の変更動作のフローチャートを図4に示す。まず、ステップS21において、現在地座標を取得してステップS22に進む。このステップは上述したステップS11と同様である。
【0045】
次に、ステップS22において、目的地までの残距離8dを算出してステップ23に進む。このステップでは、残距離判定部6が、現在地・進行方向算出部3から入力された現在地の座標と、目的地設定部4bから設定された目的地8bの座標と、から目的地までの残距離8dを算出している。
【0046】
次に、ステップS23において、ステップS22で算出した残距離8dが予め定めた所定値以下か否かを判断し、所定値以下である場合はステップS24に進み、所定値よりも大きい場合はステップS21に戻る。このステップでは、残距離判定部6が、ステップS22で算出した残距離が所定値以下か否を判定している。
【0047】
次に、ステップS24において、許容範囲8eの角度θと閾値(時間閾値、距離閾値)とを変更してステップS21に戻る。このステップでは、ステップS23の判定を受けて、許容範囲・閾値変更部7が、許容範囲8eの角度θと閾値(時間閾値、距離閾値)とを変更するように判定部5に指示している。そして、判定部5は、この変更された許容範囲8eの角度θと時間閾値、距離閾値を用いる。
【0048】
図3のフローチャートは、ステップS24からステップS21に戻ってループするので、残距離が少なくなるにしたがって許容範囲8eの角度θと、時間閾値および距離閾値の値を小さくする(許容範囲8eの角度θを狭くし、報知までの時間や距離を短くする)ことができる。そのため、ステップS23の所定値は、ループする度に残距離に応じて小さい値が設定されていく。
【0049】
なお、許容範囲8eの角度θと、時間閾値および距離閾値は全て変更しなくてもよく、例えば、許容範囲8eの角度θは変更して、時間閾値および距離閾値は変更しないようにしてもよいし、逆に、許容範囲8eの角度θを変更せずに、時間閾値および距離閾値を変更するようにしてもよい。また、残距離8dに応じてどのパラメータを変更するかを決めてもよい。要するに、許容範囲8eの角度θ、時間閾値、距離閾値のうち少なくともいずれか1つを小さくするように変更すればよい。
【0050】
本実施例によれば、許容範囲設定部4aから、目的地8bと現在地および進行方向8aとを結ぶ線である目的地方向8cを中心とした角度θの範囲で設定される許容範囲8eと、その許容範囲8e外であると判断したことを維持した時間の閾値である時間閾値および許容範囲8e外であると判断したことを維持した距離の閾値である距離閾値と、を設定し、許容範囲8e外を移動し続けた時間や距離を計測して、その時間または距離が時間閾値または距離閾値のうち少なくともいずれか一方を超えたと判定部5が判定した場合に進行方向が目的地8bの方向を外れていることを表示部8やスピーカ9を用いて報知するので、時間閾値と距離閾値を設定して報知することによって、ユーザが表示部8を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲8eの内と外を頻繁に跨ぐ場合に、報知が頻発することを避けることができる。
【0051】
また、許容範囲・閾値変更部7が、許容範囲8eと、時間閾値および距離閾値と、を残距離8dが少なくなるに従って小さくするように変化させるので、目的地8bへ近づくようにして確実に目的地8bに案内することができる。
【0052】
また、表示部8では、許容範囲8eを明るく表示し、許容範囲以外の領域8gを暗く表示しているので、目的地8bを含む許容範囲8eを目立つようにして、進行すべき方向を分かり易く表示することができる。
【実施例2】
【0053】
次に、本発明の第2の実施例にかかる案内装置1を図5および図6を参照して説明する。なお、前述した第1の実施例と同一部分には、同一符号を付して説明を省略する。
【0054】
本実施例では、操作部4に到着予定時間設定部4cが追加され、残距離判定部6が残時間・残距離判定部6´に変更になっている点が第1の実施例とは構成上異なる。
【0055】
到着予定時間設定手段としての到着予定時間設定部4cは、目的地8bへの到着予定時間を設定する。残時間・残距離判定部6´は、残距離判定部6の機能に加えて、時計機能を備え、到着予定時間設定部4cで設定された目的地8bへの到着予定時間に対する残り時間(残時間)を算出して、許容範囲・閾値変更部7へ出力する。
【0056】
本実施例では、案内装置1の報知動作は図3に示したフローチャートと同様であるが、許容範囲8eと、時間閾値および距離閾値の変更動作が若干異なる。本実施例における許容範囲8eと、時間閾値および距離閾値の変更動作のフローチャートを図6に示す。図6に示したフローチャートのうち、ステップS31、S32は図4に示したフローチャートのステップS21、S22と同様である。
【0057】
ステップS32から進んだステップS33においては、目的地までの残時間を算出してステップS34に進む。このステップでは、残時間・残距離判定部6´が到着予定時間設定部4cから設定された目的地8bへの到着予定時間と、現在時刻から目的地8bへの到着予定時間に対する残時間を算出している。
【0058】
次に、ステップS34において、ステップS33で算出した残距離8dまたは残時間が予め定めた所定値以下か否かを判断し、所定値以下である場合はステップS35に進み、所定値よりも大きい場合はステップS31に戻る。このステップでは、残時間・残距離判定部6´が、ステップS32、S33で算出した残距離8dと残時間が所定値以下か否かを判定している。
【0059】
次に、ステップS35において、許容範囲8eの角度θと閾値(時間閾値、距離閾値)とを変更してステップS31に戻る。このステップでは、ステップS24の動作に加えて、残時間に応じても、許容範囲・閾値変更部7が、許容範囲8eの角度θと閾値(時間閾値、距離閾値)とを変更するように判定部5に指示している。
【0060】
なお、図6に示したフローチャートは、残距離も所定値以下か否か判断していたが、残時間のみを所定値以下か否か判断するようにしてもよい。
【0061】
また、ステップS35は、基本的には残距離や残時間が少なくなるにしたがって許容範囲8eの角度θと、時間閾値および距離閾値の値を小さくするが、残時間と残距離8dの関係によって許容範囲8eの角度θと、時間閾値および距離閾値の値を大きくしてもよい。例えば、順調に目的地8bに接近しており時間的に余裕がある場合は許容範囲8eの角度θを広げたり、時間閾値および距離閾値の値を大きくして自由に行動できる範囲を広げてもよい。この残時間と残距離8dの関係は、例えば、本案内装置1を備えている移動体の種類(歩行、自転車、自動車)に応じて適宜定めればよい。即ち、残距離が所定距離以内であって、かつ、残時間が所定時間以上である場合は、許容範囲の角度、時間の閾値、距離の閾値のうち少なくともいずれか1つを大きくするように変更している。
【0062】
本実施例によれば、目的地8bへの到着予定時間を設定する到着予定時間設定部4cを備え、許容範囲・閾値変更部7が、残時間・残距離判定部6´で算出された到着予定時間までの残時間が短くなるにしたがって、許容範囲8eの角度θと、時間閾値および距離閾値を小さくするように変化させているので、残距離8dだけでなく目的地8bへの到着予定時間までの残時間よっても目的地8bへ近づくように案内することができる。
【0063】
また、残距離8dが所定距離以内であって、かつ、残時間が所定時間以上である場合は、許容範囲8eの角度θ、時間閾値、距離閾値のうち少なくともいずれか1つを大きくするように変化させてもよいので、目的地8bへ順調に近づき時間に余裕がある場合は行動範囲を広げることができる。
【0064】
なお、目的地8bへの案内は、許容範囲8eの角度θ、時間閾値、距離閾値を小さくするだけでなく、目的地8bに予め定めた特定の距離以内または到着予定時間まで特定の時間以内まで接近した際に残距離8dが増加した場合は、時間閾値および距離閾値を0として直ちに進行方向が目的地方向と異なる状態であることを報知するようにしてもよい。このようにすることで、例えば目的地8bを通過してしまっても直ぐに報知することができる。即ち、残距離が所定距離以内または残時間が所定時間以内であって、かつ、残距離が増加した場合は、時間の閾値および距離の閾値を0に変更している。
【0065】
また、上述した2つの実施例では、時間閾値および距離閾値は残距離8dや残時間によって変化させていたが、図7に示すように、進行方向が目的地方向8cとどの程度ずれているかによって変化させてもよい。即ち、許容範囲8eの外に進行方向があると判断した場合に、許容範囲・閾値変更部7が、進行方向と、目的地方向8cとの角度に応じて時間の閾値および距離の閾値を変更している。
【0066】
例えば、図7において、許容範囲8eの角度θを目的地方向8cから±60°とし、許容範囲以外の領域8gのうち許容範囲8eに隣接する領域である目的地方向8cから+60°〜+120°の範囲と目的地方向8cから−60°〜−120°の範囲の領域8g1は、許容範囲8e外である状態が継続した時間の閾値である時間閾値を5分、許容範囲8e外である状態が継続した距離の閾値である距離閾値を1kmとして、残りの目的地方向8cから+120°〜+240°の領域8g2は、時間閾値を3分、距離閾値500mなどとして閾値を小さくすることで、目的地8bと全く異なる方向へ進行していた場合は迅速に報知することができる。つまり、許容範囲8eの角度θの絶対値が大きくなるに従って閾値を徐々に小さくしている。勿論、許容範囲8e以外の領域8gの分割条件は図7で示した2種類に限らずもっと細分化してもよい。
【0067】
また、上述した目的地案内装置1は、カーナビゲーション装置に限らず、自転車や歩行者用のナビゲーション装置などにも適用できる。
【0068】
また、上述した目的地案内装置1を許容範囲設定部4a、目的地設定部4b、到着予定時間設定部4c、判定部5、残距離判定部6(残時間・残距離判定部6´)、許容範囲変更部7をなどをコンピュータで動作するプログラムとして構成することで、本発明を目的地案内プログラムとして構成することができる。
【0069】
前述した実施例によれば、以下の案内装置1、案内方法および案内プログラムが得られる。
【0070】
(付記1)移動体の目的地8bおよび現在地に関する情報を取得するGPS受信機2、現在地・進行方向算出部3、目的地設定部4bと、
移動体の進行方向が、目的地8bと現在地とを結ぶ線を中心とした所定の角度である許容範囲8eの外であるか否か判断する判定部5と、
判定部5が許容範囲8eの外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する判定部5と、
判定部5で計測された移動時間が所定の時間閾値を超えた場合、または、移動距離が所定の距離閾値を超えた場合に、進行方向に関する報知を行なう判定部5、表示部8、スピーカ9と、
現在地から目的地8bまでの残距離に応じて時間閾値または距離閾値を変更する残距離判定部6、許容範囲・閾値変更部7と、
を備えていることを特徴とする案内装置1。
【0071】
(付記2)移動体の目的地8bおよび現在地に関する情報を取得するステップS11、S12と、
移動体の進行方向が、目的地8bと前記現在地とを結ぶ線を中心とした所定の角度である許容範囲8eの外であるか否か判断するステップS13と、
ステップS13において許容範囲8eの外であると判断した状態を維持したまま移動体が移動する移動時間または移動距離を計測するステップS14と、
ステップS14において計測された移動時間が所定の時間閾値を超えた場合、または、移動距離が所定の距離閾値を超えた場合に、進行方向に関する報知を行なうステップS15と、
現在地から目的地8bまでの残距離に応じて時間閾値または距離閾値を変更するステップS24と、
を備えていることを特徴とする案内方法。
【0072】
(付記3)移動体の目的地8bおよび現在地に関する情報を取得するGPS受信機2、現在地・進行方向算出部3、目的地設定部4bと、
移動体の進行方向が、目的地8bと現在地とを結ぶ線を中心とした所定の角度である許容範囲8eの外であるか否か判断する判定部5と、
判定部5が許容範囲8eの外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する判定部5と、
判定部5で計測された移動時間が所定の時間閾値を超えた場合、または、移動距離が所定の距離閾値を超えた場合に、進行方向に関する報知を行なう判定部5、表示部8、スピーカ9と、
現在地から目的地8bまでの残距離に応じて時間閾値または距離閾値を変更する残距離判定部6、許容範囲・閾値変更部7と、
してコンピュータに機能させることを特徴とする案内プログラム。
【0073】
これらの案内装置1、案内方法および案内プログラムによれば、時間閾値と距離閾値を設定して報知することによって、ユーザが表示部8を常に確認しながら進行する必要がなくなり、また、進行している道路が許容範囲8eを頻繁に跨ぐ場合に、報知が頻発することを避けることができる。また、許容範囲8eと、時間閾値および距離閾値を目的地8bまでの残距離に基づいて変化させることによって、経路はユーザが自由に選択しつつ確実に目的地8bへ近づくように案内することができる。
【0074】
なお、前述した実施例は本発明の代表的な形態を示したに過ぎず、本発明は、実施例に限定されるものではない。すなわち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【符号の説明】
【0075】
1 案内装置
2 GPS受信機(取得手段)
3 現在地・進行方向算出部(取得手段)
4b 目的地設定部(取得手段)
4c 到着予定時間設定部(到着予定時間設定手段)
5 判定部(判断手段、計測手段、報知手段)
6 残距離判定部(変更手段)
6´ 残時間・残距離判定部(変更手段)
7 許容範囲・閾値変更部(変更手段)
8 表示部(表示手段、報知手段)
8a 現在地および進行方向
8b 目的地
8c 目的地方向(目的地と現在地とを結ぶ線)
8e 許容範囲
8g 許容範囲以外の領域(許容範囲の外)
9 スピーカ(報知手段)
θ 許容範囲の角度
S11 現在地座標取得(取得ステップ)
S12 目的地方向・進行方向算出(取得ステップ)
S13 進行方向が許容範囲外(判断ステップ)
S14 目的地方向とずれた状態の長さ判定(計測ステップ)
S15 報知(報知ステップ)
S24 許容範囲と閾値変更(変更ステップ)
【特許請求の範囲】
【請求項1】
移動体の目的地および現在地に関する情報を取得する取得手段と、
前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断手段と、
前記判断手段が前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測手段と、
前記計測手段で計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知手段と、
前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更手段と、
を備えていることを特徴とする案内装置。
【請求項2】
前記目的地への到着予定時間を設定する到着予定時間設定手段を備え、
前記変更手段が、前記到着予定時間から算出された前記到着予定時間までの残時間に基づいて、前記許容範囲と、前記時間の閾値および前記距離の閾値と、を変更することを特徴とする請求項1に記載の案内装置。
【請求項3】
前記変更手段が、前記目的地までの残距離が短くなるに従って、前記許容範囲の角度、前記時間の閾値、前記距離の閾値のうち少なくともいずれか1つを小さくするように変更することを特徴とする請求項1または2に記載の案内装置。
【請求項4】
前記変更手段が、前記到着予定時間設定手段に設定された前記到着予定時間にまでの残時間を算出するとともに、前記目的地までの残時間が短くなるに従って、前記目的地と前記許容範囲の角度、前記時間の閾値、前記距離の閾値のうち少なくともいずれか1つを小さくするように変更することを特徴とする請求項2または3のうちいずれか一項に記載の案内装置。
【請求項5】
前記変更手段が、前記残距離が所定距離以内であって、かつ、前記残時間が所定時間以上である場合は、前記許容範囲の角度、前記時間の閾値、前記距離の閾値のうち少なくともいずれか1つを大きくするように変更することを特徴とする請求項2乃至4のうちいずれか一項に記載の案内装置。
【請求項6】
前記変更手段が、前記残距離が所定距離以内または前記残時間が所定時間以内であって、かつ、前記残距離が増加した場合は、前記時間の閾値および前記距離の閾値を0に変更することを特徴とする請求項2乃至4のうちいずれか一項に記載の案内装置。
【請求項7】
前記判断手段が前記許容範囲の外に前記移動体の進行方向があると判断した場合に、前記変更手段が、前記進行方向と目的地と前記現在地とを結ぶ線との角度に応じて前記時間の閾値および前記距離の閾値を変更することを特徴とする請求項1乃至6のうちいずれか一項に記載の案内装置。
【請求項8】
前記表示手段が、前記許容範囲内と前記許容範囲外とで異なる表示としていることを特徴とする請求項1乃至7のうちいずれか一項に記載の案内装置。
【請求項9】
移動体の目的地および現在地に関する情報を取得する取得ステップと、
前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断ステップと、
前記判断ステップにおいて前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測ステップと、
前記計測ステップにおいて計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知ステップと、
前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更ステップと、
を備えていることを特徴とする案内方法。
【請求項10】
移動体の目的地および現在地に関する情報を取得する取得手段と、
前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断手段と、
前記判断手段が前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測手段と、
前記計測手段で計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知手段と、
前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更手段と、
してコンピュータを機能させることを特徴とする案内プログラム。
【請求項11】
請求項10に記載の案内プログラムを格納したことを特徴とするコンピュータ読み取り可能な記録媒体。
【請求項1】
移動体の目的地および現在地に関する情報を取得する取得手段と、
前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断手段と、
前記判断手段が前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測手段と、
前記計測手段で計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知手段と、
前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更手段と、
を備えていることを特徴とする案内装置。
【請求項2】
前記目的地への到着予定時間を設定する到着予定時間設定手段を備え、
前記変更手段が、前記到着予定時間から算出された前記到着予定時間までの残時間に基づいて、前記許容範囲と、前記時間の閾値および前記距離の閾値と、を変更することを特徴とする請求項1に記載の案内装置。
【請求項3】
前記変更手段が、前記目的地までの残距離が短くなるに従って、前記許容範囲の角度、前記時間の閾値、前記距離の閾値のうち少なくともいずれか1つを小さくするように変更することを特徴とする請求項1または2に記載の案内装置。
【請求項4】
前記変更手段が、前記到着予定時間設定手段に設定された前記到着予定時間にまでの残時間を算出するとともに、前記目的地までの残時間が短くなるに従って、前記目的地と前記許容範囲の角度、前記時間の閾値、前記距離の閾値のうち少なくともいずれか1つを小さくするように変更することを特徴とする請求項2または3のうちいずれか一項に記載の案内装置。
【請求項5】
前記変更手段が、前記残距離が所定距離以内であって、かつ、前記残時間が所定時間以上である場合は、前記許容範囲の角度、前記時間の閾値、前記距離の閾値のうち少なくともいずれか1つを大きくするように変更することを特徴とする請求項2乃至4のうちいずれか一項に記載の案内装置。
【請求項6】
前記変更手段が、前記残距離が所定距離以内または前記残時間が所定時間以内であって、かつ、前記残距離が増加した場合は、前記時間の閾値および前記距離の閾値を0に変更することを特徴とする請求項2乃至4のうちいずれか一項に記載の案内装置。
【請求項7】
前記判断手段が前記許容範囲の外に前記移動体の進行方向があると判断した場合に、前記変更手段が、前記進行方向と目的地と前記現在地とを結ぶ線との角度に応じて前記時間の閾値および前記距離の閾値を変更することを特徴とする請求項1乃至6のうちいずれか一項に記載の案内装置。
【請求項8】
前記表示手段が、前記許容範囲内と前記許容範囲外とで異なる表示としていることを特徴とする請求項1乃至7のうちいずれか一項に記載の案内装置。
【請求項9】
移動体の目的地および現在地に関する情報を取得する取得ステップと、
前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断ステップと、
前記判断ステップにおいて前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測ステップと、
前記計測ステップにおいて計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知ステップと、
前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更ステップと、
を備えていることを特徴とする案内方法。
【請求項10】
移動体の目的地および現在地に関する情報を取得する取得手段と、
前記移動体の進行方向が、前記目的地と前記現在地とを結ぶ線を中心とした所定の角度である許容範囲の外であるか否か判断する判断手段と、
前記判断手段が前記許容範囲の外であると判断した状態を維持したまま前記移動体が移動する移動時間または移動距離を計測する計測手段と、
前記計測手段で計測された前記移動時間が所定の時間の閾値を超えた場合、または、前記移動距離が所定の距離の閾値を超えた場合に、前記進行方向に関する報知を行なう報知手段と、
前記現在地から前記目的地までの残距離に応じて前記時間の閾値または前記距離の閾値を変更する変更手段と、
してコンピュータを機能させることを特徴とする案内プログラム。
【請求項11】
請求項10に記載の案内プログラムを格納したことを特徴とするコンピュータ読み取り可能な記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−98197(P2012−98197A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−247247(P2010−247247)
【出願日】平成22年11月4日(2010.11.4)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月4日(2010.11.4)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]