
椅子型マッサージ機

【課題】使用者の着座姿勢を判別して適切なマッサージを行う椅子型マッサージ機を提供することを目的とする。
【解決手段】使用者が着座可能な座部2と、該座部2の後方に設けられる背凭れ部4と、使用者の身体部位を施療する施療部6と、該施療部の動作を制御する制御部7が設けられた椅子型マッサージ機1であって、前記施療部6は、使用者の身長方向に所定範囲内で上下動可能に設けられ、使用者の身体部位の前記背凭れ部4への当接度合の変化を検出する当接検出センサ70を備え、前記施療部6の可動範囲内における所定位置での当接検出に基づいて、使用者の着座姿勢を判別する着座姿勢判別手段を有している。
【解決手段】使用者が着座可能な座部2と、該座部2の後方に設けられる背凭れ部4と、使用者の身体部位を施療する施療部6と、該施療部の動作を制御する制御部7が設けられた椅子型マッサージ機1であって、前記施療部6は、使用者の身長方向に所定範囲内で上下動可能に設けられ、使用者の身体部位の前記背凭れ部4への当接度合の変化を検出する当接検出センサ70を備え、前記施療部6の可動範囲内における所定位置での当接検出に基づいて、使用者の着座姿勢を判別する着座姿勢判別手段を有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、使用者が着座する座部と、該座部に着座した使用者の上半身を後方から支持する背凭れ部と、使用者の身体部位を施療する施療部を備える椅子型マッサージ機に関し、特に、使用者の身体部位の背凭れ部への当接を検出する当接検出センサを備え、着座姿勢を判別することが可能な椅子型マッサージ機に関するものである。
【背景技術】
【0002】
従来、使用者が着座する座部と、該座部に着座した使用者の上半身を後方から支持する背凭れ部と、使用者の身体部位を施療する施療部と、使用者の身体部位の背凭れ部への当接を検出するセンサを備える椅子型マッサージ機が多数提案されている。このような椅子型マッサージ機の中には、使用者の体型を検出する体型検出手段を備え、揉み玉を使用者に当接させることにより使用者の体型を検出可能になっているものもある(特許文献1参照)。
【特許文献1】特開2002−369851号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1の椅子型マッサージ機では、使用者の体型に合わせて設定したマッサージ箇所やマッサージ強度でマッサージを行うことができる。しかし、ときには使用者の体型に合ったマッサージではない場合もある。例えば、適正な姿勢で着座していなければ使用者の体型を正確に検出することができず、使用者の体型に合ったマッサージを設定することができない。また、正確に使用者の体型を検出したとしても、マッサージ中に使用者の着座姿勢が変わった場合、設定したマッサージが使用者の体型に合ったものではなくなり、十分なマッサージを行うことができない場合がある。
【0004】
そこで本発明は、使用者の着座姿勢を判別して適切なマッサージを行う椅子型マッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、使用者が着座可能な座部と、該座部の後方に設けられる背凭れ部と、使用者の身体部位を施療する施療部と、該施療部の動作を制御する制御部が設けられた椅子型マッサージ機であって、前記施療部は、使用者の身長方向に所定範囲内で上下動可能に設けられ、使用者の身体部位の前記背凭れ部への当接度合の変化を検出する当接検出センサを備え、前記施療部の可動範囲内における所定位置での当接検出に基づいて、使用者の着座姿勢を判別する着座姿勢判別手段を有していることを特徴とする。このような構成とすることにより、使用者の身体部位の当接度合の変化を検出する当接検出センサを備えた施療部を、身長方向に上下動させて使用者の着座姿勢を判別することができる。
【0006】
また、前記着座姿勢判別手段は、前記施療部の可動範囲内における下限位置での当接検出によって、使用者の着座姿勢を判別することが好ましい。このような構成とすることにより、座部に着座した使用者の腰部付近の当接を検出するだけで、使用者の着座姿勢を判別することができる。
【0007】
また、前記着座姿勢判別手段は、前記当接検出センサが前記施療部の可動範囲内における下限位置で使用者の当接を検出し、他の位置で使用者の非当接を検出することにより第1の着座姿勢を判別し、前記当接検出センサが前記下限位置で使用者の非当接を検出し、他の位置で使用者の当接を検出することにより第2の着座姿勢を判別することが好ましい。このような構成とすることにより、座部に着座した使用者の腰部付近と、他の位置の2箇所の当接を検出するだけで、使用者の着座姿勢を判別することができる。
【0008】
また、前記着座姿勢判別手段は、前記施療部が前記施療部の可動範囲内における下限位置から上方に移動する過程で着座姿勢を判別することが好ましい。
【0009】
また、前記着座姿勢判別手段による着座姿勢の判別結果を使用者に報知する報知手段を有していることが好ましい。このような構成とすることにより、使用者に対して着座姿勢を報知し、適正に着座することを促すことができる。
【0010】
また、前記着座姿勢判別手段は、前記施療部による施療動作を開始する前に使用者の着座姿勢の判別を行う施療開始前判別手段と、前記施療部による施療動作中において、更に使用者の着座姿勢の判別を所定回数行う施療開始後判別手段とを有し、前記施療開始前判別手段によって前記第1の着座姿勢を判別することにより前記制御部は前記施療部による施療動作を開始することが好ましい。このような構成とすることにより、施療開始前に検出した着座姿勢が施療中における着座姿勢と異なった場合、再度着座姿勢を判別し、現状の着座姿勢を把握することができる。
【0011】
また、前記施療部による施療動作中において、前記制御部は、前記当接検出センサによる使用者の身体部位の非当接を所定時間継続して検出することにより施療動作を中止するよう制御することが好ましい。このような構成とすることにより、前記施療部による施療動作中に、使用者が所定時間以上継続して、前記椅子型マッサージ機に着座していない場合、施療動作を中止することができる。
【0012】
また、前記施療開始後判別手段による使用者の当接検出において、前記施療開始前判別手段によって使用者の非当接を検出した第1位置とは異なる第2位置で非当接を検出することにより、前記第2位置を使用者の特定部位として設定することが好ましい。このような構成とすることにより、施療開始前に検出した着座姿勢が施療中における着座姿勢と異なった場合、現状の着座姿勢に基づいて使用者の特定部位を再設定することができる。
【0013】
また、前記第2位置は、前記第1位置よりも高い位置であることが好ましい。このような構成とすることにより、施療開始前における使用者の着座姿勢が前傾姿勢となっていた場合、施療中に使用者がより背凭れ部に凭れかかった状態になった場合の着座姿勢に基づいて使用者の特定部位を再設定することができる。
【0014】
また、前記施療開始前判別手段によって前記第2の着座姿勢を判別すると、前記第1の着座姿勢を判別するまで着座姿勢の判別を繰り返すことが好ましい。このような構成とすることにより、使用者の腰部付近が背凭れ部に当接した着座姿勢になるまで、着座姿勢の判別を繰り返すことができる。
【0015】
また、前記施療開始前判別手段によって前記第2の着座姿勢を判別することにより、前記制御部は、前記施療部による施療動作の開始を中止することが好ましい。このような構成とすることにより、使用者の腰部付近が背凭れ部に当接していない姿勢での施療動作の実行を中止できる。
【0016】
また、前記施療部は前後方向へ進退移動可能に構成され、且つ進退量を検出する進退量検出センサを備え、前記着座姿勢判別手段は、前記施療部が上下方向所定間隔で進退量を検出することにより前記背凭れ部と使用者の身体までの距離を測定して使用者の着座姿勢を判別することが好ましい。このような構成とすることにより、上下方向所定間隔で使用者の身体と前記背凭れ部との距離を測定し、使用者の着座姿勢を判別することができる。
【0017】
また、前記制御部は、前記着座姿勢判別手段によって判別された着座姿勢に基づいて前記施療部による施療動作を決定することが好ましい。このような構成とすることにより、使用者の着座姿勢に応じた施療動作を決定し、より効果的な施療を行うことができる。
【発明の効果】
【0018】
本発明によれば、使用者の着座姿勢を判別することができる椅子型マッサージ機を実現することができる。
【発明を実施するための最良の形態】
【0019】
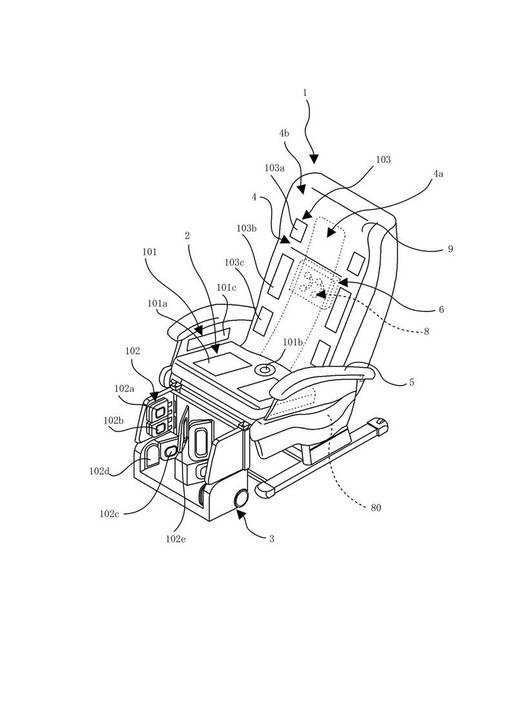
以下、本発明の実施の形態を図面に基づいて説明する。図1はこの発明のマッサージ機の実施の一形態を示す斜視図である。このマッサージ機1は、使用者(被施療者)の臀部及び大腿部を支持する座部2と、使用者の脚及び足裏を支持するフットレスト(脚載部)3と、使用者の背中を支持する背凭れ部4と、左右両側に設けられた使用者の腕を支持する肘掛部5とを備えた椅子型のものである。フットレスト3と背凭れ部4とは、電動駆動機構、流体圧駆動機構又は手動で操作する機構等により、座部に対して角度変更が可能となっている。なお、本明細書において、前記背凭れ部4の幅方向を「左右方向」、高さ方向を「上下方向」、奥行き方向を「前後方向」といい、その他の場合は適宜説明するものとする。
【0020】
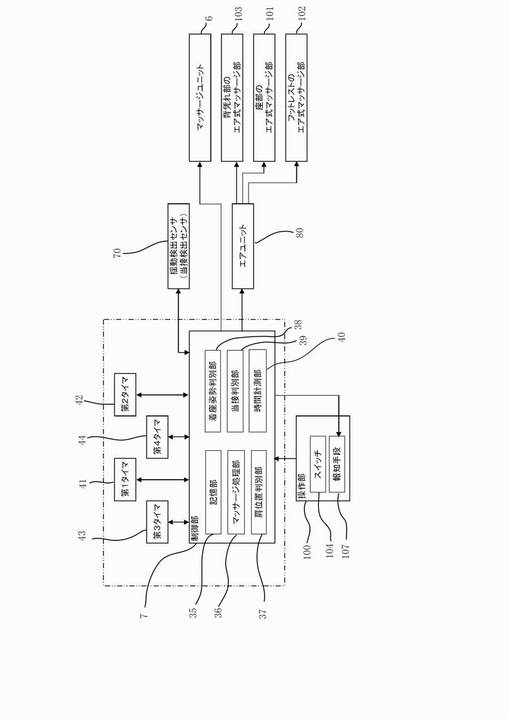
座部2には、使用者の臀部及び大腿部を、下部及び側部からマッサージ(押圧)する座部用エア式マッサージ部101が設けられており、このエア式マッサージ部101は複数のエアセル101a,101b,101c,を有している。フットレスト3には、使用者の脹脛、足首、足の甲等の部分をマッサージ(押圧)する脚部用エア式マッサージ部102が設けられており、このエア式マッサージ部102は複数のエアセル102a,102b,102c,102d,102eを有している。背凭れ部4には使用者の左右の肩部、背中の左右両側部、腰の左右両側部をマッサージ(押圧)する背凭れ部用エア式マッサージ部103が設けられており、このエア式マッサージ部103は、複数のエアセル103a,103b,103cを有している。
【0021】
これらエアセルのそれぞれは設置箇所に応じた形状となっており、各エアセルは例えば蛇腹形状であり扇状に膨張することができる。そして、座部2の下方に設けられたエアユニット80によって、各エアセルに対してエアの給排が行われることで、各エアセルは膨縮動作することができる。エアユニット80は切り替え制御弁(図示せず)等を有しており、この椅子型マッサージ機1が備えている制御部7(図8参照)がこの切り替え制御弁を制御することにより、エアセルはそれぞれ独立して動作することができる。
【0022】
図1において、背凭れ部4には、使用者の肩部、背中及び腰部をマッサージするための施療子(モミ玉)8を備えているマッサージユニット(施療部)6が、上下方向に昇降自在に設けられている。このマッサージユニット6は、この椅子型マッサージ機1が備えている制御部7(図8参照)によってその動作が制御される。
【0023】
背凭れ部4の内部には、上下方向に延びる左右一対のガイドレール(図示せず)が延設されており、この両ガイドレール間にマッサージユニット6が走行自在に設けられている。背凭れ部4は中央部に開口部4aと、その両側に使用者の身体(背中)を支持する支持部4bとを有しており、施療子8は開口部内において昇降したり、揉みや叩き等の施療動作をしたりできる。なお、前記エアセル103a,103b,103cは、支持部4bに設けられている。また、背凭れ部4の前面部分は、布製又は革製の可撓性を有するカバー部材9によって覆われている。
【0024】
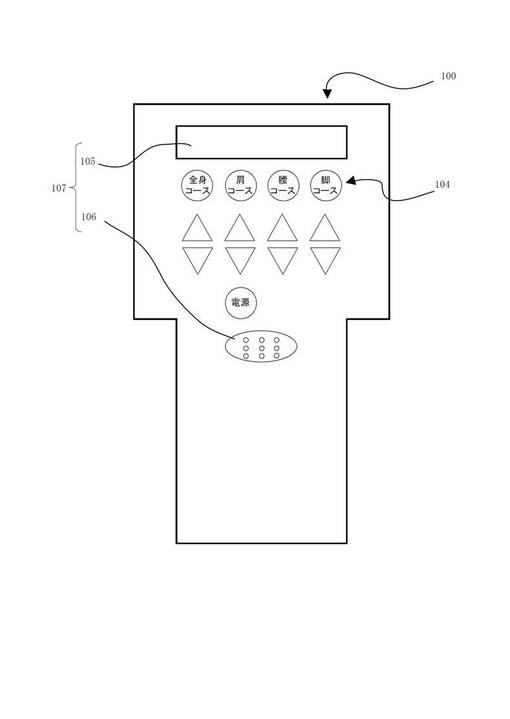
図2は、操作部100の正面図である。操作部100には、後述する自動マッサージプログラムの実行を開始する各種スイッチ(押しボタン)104、コース内容や後述する着座姿勢の判別結果を使用者に報知する報知手段107としての液晶表示部105やスピーカ106が設けられている。使用者はこの操作部100を操作してマッサージを行う。
【0025】
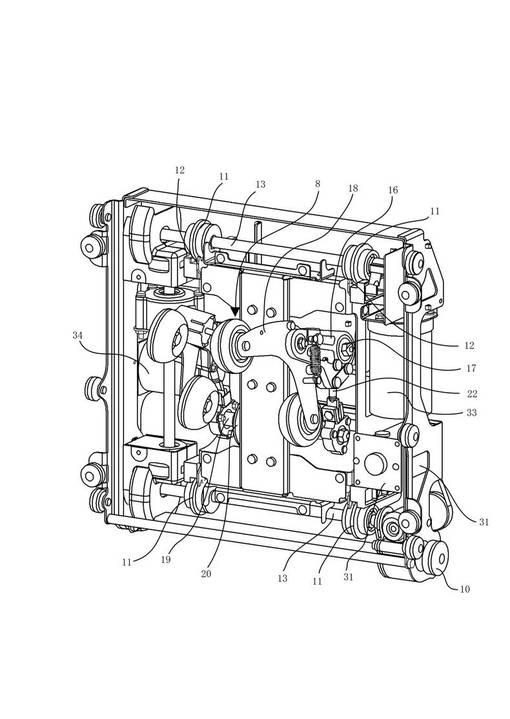
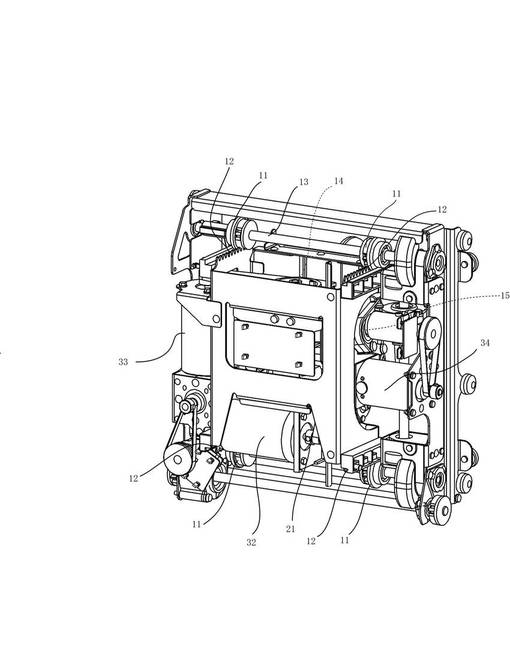
図3は、マッサージユニット6の前方からの斜視図であり、図4は後方からの斜視図である。このマッサージユニット6は、昇降用モータ31、叩き用モータ32、揉み用モータ33、及び進退用モータ34が配設されている。
【0026】
昇降用モータ31は、マッサージユニット6の右側下方において、その出力軸が前後方向に沿って配設されている。昇降用モータ31の出力は、減速機構等を介して図示しないガイドレールに沿って設けられたラックと噛合する第1ピニオン10に伝達され、マッサージユニット6を昇降させる。
【0027】
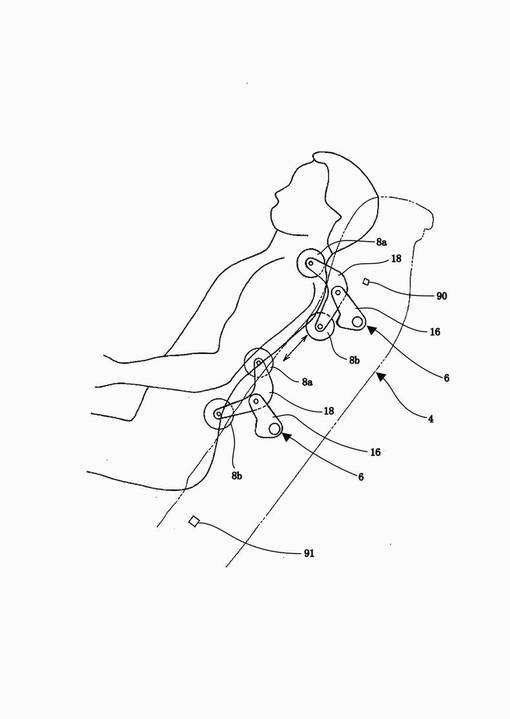
また、図5に示すように、マッサージユニット6が上下移動する上下位置に上限リミットスイッチ90が設けられると共に下限位置に下限リミットスイッチ91が設けられており、マッサージユニット6は、この上限位置と下限位置との間を上下移動するように制御部7(図8参照)により制御される。更に、マッサージユニット6の上下方向の移動位置を、昇降用モータ31の回転数等によって検出して制御部7に入力するように構成されている。
【0028】
叩き用モータ32は、マッサージユニット6の中央下方において、その出力軸が左右方向に沿って配設されており、揉み用モータ33は、右側やや上方において、その出力軸が上下方向に沿って配設されている。これら叩き用モータ32、及び揉み用モータ33の出力は、減速機構等を介して所定の部位に伝達され、偏心プーリーや偏心リンク等によって偏心回転や揺動に変換され、使用者の身体(被施療部)をマッサージする施療子8に揉みや叩き動作を行わせる。
【0029】
進退用モータ34は、マッサージユニットの中央左側の後方において、その出力軸が背凭れ部の左右方向に沿うように配設されている。マッサージユニット6は、この進退用モータ34に減速機構等を介して連結された第2ピニオン11と、この第2ピニオン11と噛合し背凭れ部4の前後方向に沿って配設されたラック12とを備えている。進退用モータ34が回転すると、減速機構等を介して進退用モータ34の回転出力が駆動シャフト13に伝達され、駆動シャフト13が回転し、これにより駆動シャフト13に設けられた第2ピニオン11がラック12と噛み合い、マッサージユニット6が前後に移動する。なお、マッサージユニット6の前進位置又は後退位置は、駆動シャフト13や進退用モータ34に設けられたロータリーエンコーダ等(図示せず)によって駆動シャフト13や進退用モータ34の回転数を検出し、この回転数の信号に基づいて判別することができるように構成されている。また、前進位置又は後退位置を判別する他の手段として、磁気センサ(図示でず)を、駆動シャフト13の軸長方向の所定箇所において、円周方向の複数位置に配置された磁石(図示せず)と対向するように、駆動シャフト13の近傍に配置し、周囲の磁気の強さに応じた出力電圧を発生するようにしてもよい。駆動シャフト13が回転した場合には、前記磁気センサの近傍を前記磁石が順次通過するので、制御部7が前記磁気センサからの出力電圧のピークを計数することにより、駆動シャフト13の回転数を検出し、この回転数の信号に基づいてマッサージユニット6の前進位置又は後退位置を判別できる。
【0030】
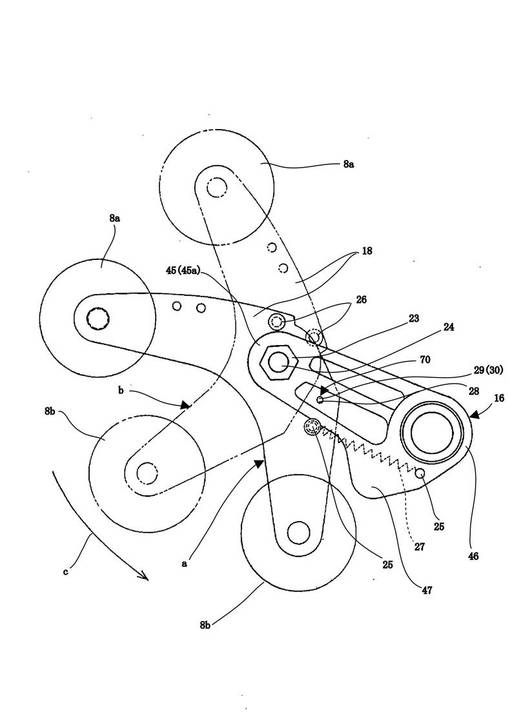
図4に示すように、マッサージユニット6は、揉み用モータ33と、この揉み用モータ33と連結されモータ33の回転数を減速する減速機構(ギア部)14と、左右両側へ延び減速機構14の出力軸となっている揉み用駆動軸15と、駆動アーム16とを備えている。揉み用モータ33が回転駆動すると、減速機構14を介して揉み用駆動軸15が回転する。揉み用駆動軸15の左右両側には、駆動軸15の軸心に対して偏角した(傾斜した)揉み用クランク軸17が固定されており、この左右の各クランク軸17に前記駆動アーム16の第1基端部46が回転自在に取り付けられている。そして、図3において、この駆動アーム16の先端部45に、ブーメラン状に屈曲した支持アーム18が、その中央屈曲部を中心として、回動自在に連結されている。この支持アーム18の上端部にローラよりなる第1施療子8a、下端部にローラよりなる第2施療子8bが回転自在に取り付けられている。
【0031】
また、マッサージユニット6は、叩き用駆動軸19と、この叩き用駆動軸19を回転可能に支持している軸受け部20と、叩き用駆動軸19を回転駆動する叩き用モータ32とを備えている。叩き用駆動軸19と叩き用モータ32の出力軸(図示せず)は伝動ベルト21によって連動連結されている。また、叩き用駆動軸19の左右両端部には、当該叩き用駆動軸19の軸心に対して偏心している偏心ピン(図示せず)が固定されており、この偏心ピンはユニバーサルジョイントよりなる伝動バー22を介して前記駆動アーム16の第2基端部47に連動連結されている。
【0032】
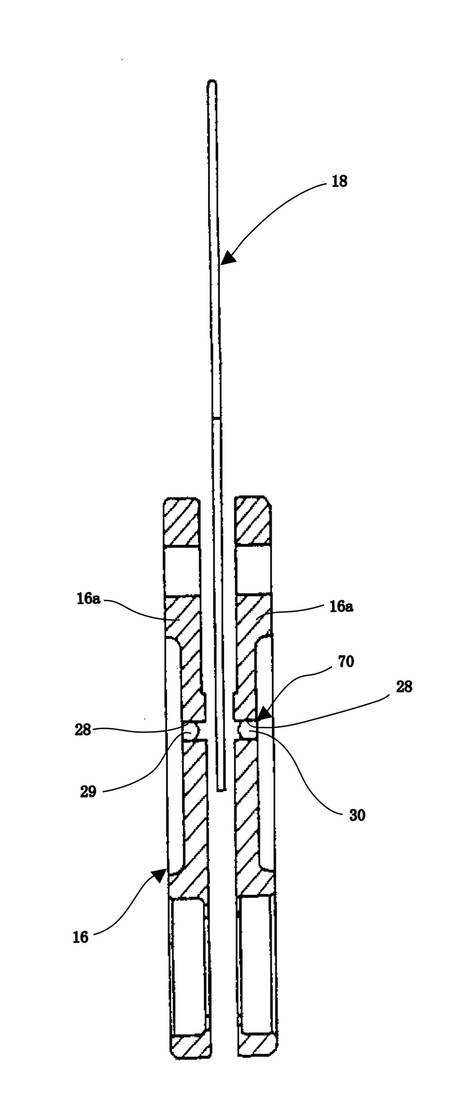
図6はこのマッサージ機1の支持アームと駆動アームの側面図であり、図7はこのマッサージ機1の支持アーム18と駆動アーム16の概略正面断面図である。前記した施療子8は、ブーメラン状に屈曲した支持アーム18の上下各端部に回転自在に取り付けられ、前記支持アーム18は、その中途部(中央屈曲部)を中心として揺動自在に前記駆動アーム16の先端部45に連結されている。各駆動アーム16は、左右一対の挟持体16aを有し、左右一対の挟持体16aの先端部45aで支持アーム18の中途部を左右に挟んで、支持アーム18及び一対の挟持体16aに挿通したボルトナット23を締結することにより、支持アーム18の中途部が、駆動アーム16の先端部45に、左右方向の軸心24廻りに揺動自在に連結されている。
【0033】
左右一対の支持アーム18は、バネ鋼等で構成した板バネ(バネ板材)によって形成されて左右方向への弾性変形を許容するべく、その板面が左右両側方を向くように背凭れ部4に配置されている。図6に示すように、各支持アーム18にスプリングピン25とストッパー26とが突設され、駆動アーム16に対する支持アーム18の揺動は、図6において支持アーム18を実線で示す如くスプリングピン25が駆動アーム16に当接する下揺動位置aから、図6において支持アーム18を鎖線で示す如くストッパー26が駆動アーム16に当接する上揺動位置bの範囲に規制されている。また、支持アーム18のスプリングピン25と駆動アーム16のスプリングピン25との間に、引っ張りバネ27が設けられ、この引っ張りバネ27によって、支持アーム18を図6に示す矢印c方向(下揺動位置a側)に付勢するようになっている。
【0034】
図6、7に示すように、駆動アーム16の左右一対の挟持体16aに左右方向に貫通するように連通孔28が設けられ、一方の挟持体16aの連通孔28に発光素子(発光ダイオード)29が設けられ、他方の挟持体16aの連通孔28に受光素子(受光トランジスタ)30が設けられ、発光素子29は受光素子30に向けて光を照射し、受光素子30は、発光素子29からの光を受光したときオンし、発光素子29からの光が支持アーム18によって遮光されたときオフするように構成され、この発光素子29と受光素子30とを有する光センサにより、支持アーム18が駆動アーム16に対して所定の揺動範囲になったことを検出する揺動検出センサ70(後述する使用者の身体部位への当接度合を検出する当接検出センサ)が構成されている。
【0035】
そして、マッサージユニット6を使用者の人体に沿って上下方向に移動させることによって、支持アーム18が備える施療子8(第1施療子8a及び第2施療子8b)の使用者の身体部位への当接度合の変化を検出する。具体的には、図5に示す如く第1施療子8aが使用者の肩又は首位置に達したとき、支持アーム18が駆動アーム16に対して図5に示す矢印c方向(下揺動位置a側)に大きく揺動し、このとき、図6に鎖線で示すように発光素子29と受光素子30との間から外れていた支持アーム18が、実線で示す如く下揺動位置a側に揺動して、発光素子29と受光素子30との間を遮光し、その結果支持アーム18が駆動アーム16に対して所定の揺動位置になって施療子8の身体部位への当接度合が弱くなったことを揺動検出センサ70が検出し、使用者の着座姿勢を判別するようになっている。この実施例では、支持アーム18の揺動位置が下揺動位置a側になるほど施療子8の身体部位への当接度合が小さく、上揺動位置b側になるほど施療子8の身体部位への当接度合が大きいことを意味する。
【0036】
次に、マッサージ機1の制御系の構成を説明する。前記揺動検出センサ70により、支持アーム18が駆動アーム16に対して所定の揺動範囲になったことを検出し、ここで検出した検出信号は、マイコン等で構成した制御部7に入力するようになっている。なお、前記揺動検出センサ70は、左右の支持アーム18及び駆動アーム16に対応して夫々左右一対ずつ設けるようにしてもよいし、左右の支持アーム18及び駆動アーム16のいずれか一方のみに対応して1個設けるようにしてもよい。
【0037】
また、図5に示すように、前記マッサージユニット6(それに備えられている支持アーム18)が上下移動する上限位置に上限リミットスイッチ90が設けられると共に、下限位置に下限リミットスイッチ91が設けられており、マッサージユニット6は、この上限位置と下限位置との間を上下移動するように制御部7により制御される。また、マッサージユニット6乃至支持アーム18の上下方向の移動位置を、昇降モータ31の回転数等によって検出して前記制御部7に入力するように構成されている。マイコン等で構成された前記制御部7は、自動コースのプログラム手順に従って各モータ31,32,33,34を制御するようになっている。
【0038】
そして、制御部7は、自動コースを選択したときの初期動作として、マッサージユニット6を使用者の人体に沿って上下に往復移動させるよう制御し(マッサージユニット6によりローリング動作を行わせるよう制御し)、このときのマッサージユニット6の移動位置と、揺動検出センサ70により検出した揺動位置との関係から使用者の着座姿勢を判別し、且つマッサージ機1に対する使用者の人体の特定部位である肩位置を判別するように構成されている。即ち、支持アーム18の揺動が所定の範囲になったとき(施療子8の身体部位への当接度合が所定以下になったとき)の、支持アーム18の移動位置から、マッサージ機1に対する使用者の特定部位の位置を判別する。
【0039】
より具体的には、マッサージユニット6に備えられた支持アーム18を駆動アーム16と共に使用者の人体に沿って上下方向に移動させることによって、図5に示す如く第1施療子8aが使用者の肩又は首位置に達したとき、支持アーム18が駆動アーム16に対して下揺動位置a側に大きく揺動し、このとき、図6に鎖線で示すように発光素子29と受光素子30との間から外れていた支持アーム18が、実線で示す如く下揺動位置a側に揺動して、発光素子29と受光素子30との間を遮蔽し、その結果揺動検出センサ70がオンからオフに切り替わって、支持アーム18が駆動アーム16に対して所定の揺動範囲になったことを揺動検出センサ70が検出する。これは、揺動検出センサ70が、施療子8の身体部位への当接度合が所定以下になったことを検出することに相当する。つまり、揺動検出センサ70は、使用者の身体部位が背凭れ部4を介して施療子8に当接している箇所ではオン状態となり、使用者の身体部位が背凭れ部4を介して施療子8に当接していない箇所ではオフ状態となる使用者の当接検出センサとして機能する。この揺動検出センサ70の検出信号は制御部7に入力され、制御部7は、このときのマッサージユニット6(それに備えられている支持アーム18)の移動位置から、使用者の着座姿勢を判別し、且つマッサージ機1に対する使用者の肩位置(使用者の特定部位の位置)を判別するようになっている。
【0040】
なお、上述した通り揺動検出センサ70を当接検出センサとして用いる実施例を説明したが、当接検出センサはこれに限られるものではない。例えば、施療子8、駆動アーム16、支持アーム18等に設けられた圧力センサ(図示せず)を当接検出センサとして用いてもよい。この場合、施療子8、駆動アーム16、支持アーム18等を介して得られる負荷を検出することで使用者の当接度合を検出できる。
【0041】
図8は、このマッサージ機1の概略のブロック図である。制御部7はCPU、メモリ(RAM)及び記憶装置(ROM)を有するプログラマブルなマイコンよりなり、駆動する各部分の動作制御等のための制御処理を行う。そしてこの制御部7は、所定の各機能を実行するプログラムを記憶装置に格納しており、このプログラムが実行する機能部として、後述する記憶部35、マッサージ処理部36、肩位置判別部(特定部位判別部)37、着座姿勢判別部38、当接判別部39、時間計測部40を備えている。
【0042】
以下、制御部7による各機能部及び各種動作について説明する。制御部7の記憶部35には、複数の自動マッサージプログラムが記憶されており、これに応じたスイッチ104が操作部100に設けられている。自動マッサージプログラムとしては、全身コース、肩コース、腰コース、脚コース等がある。各マッサージプログラムには、前記エア式マッサージ部101,102,103の動作、前記マッサージユニット6の動作(上下動作、進退動作、揉み動作、叩き動作)等の情報が含まれている。そして、制御手段7のマッサージ処理部36は、各マッサージプログラムに従って、前記エア式マッサージ部101,102,103及び前記マッサージユニット6を動作させる処理を行う。例えば、使用者が操作部100のスイッチ104を選択して操作すると、この選択されたスイッチ104に対応したマッサージプログラムを制御部7は選択し、これに応じてマッサージ処理部36はマッサージユニット6にマッサージ動作を行わせる。
【0043】
肩位置判別部37は、前述した通り、施療子8を使用者に当接させた状態で下限位置から上方へマッサージユニット6を移動させ、前記揺動検出センサ70がオンからオフに切り替わって、支持アーム18が駆動アーム16に対して所定の揺動範囲になったことを、揺動検出センサ70が検出したマッサージユニット6の移動位置から使用者の肩位置(特定部位の位置)を判別する。そして、この肩位置(特定部位の位置)は記憶部35に記憶される。そして、前記マッサージ処理部36は、前記手法により判別した使用者の肩位置に基づいて、マッサージユニット6の上下移動の可動範囲や使用者のツボ位置を算出し、昇降用モータ31、叩き用モータ32、揉み用モータ33、進退用モータ34の一部又は全てを制御して使用者に最も適したマッサージを行わせる。
【0044】
着座姿勢判別部38は、着座姿勢判別方法の詳細は後述するが、マッサージユニット6を下方から上方へ上昇させる過程で前記揺動検出センサ70によって使用者の着座姿勢を判別する。そして、この着座姿勢は記憶部35に記憶される。そして、前記マッサージ処理部36は、前記着座姿勢判別部38によって判別された着座姿勢に基づいて、昇降用モータ31、叩き用モータ32、揉み用モータ33、進退用モータ34の一部又は全てを制御して使用者に適した動作をマッサージユニット6に行わせる。
【0045】
当接判別部39は、前述した通り、施療子8を下限位置から上方へマッサージユニット6を移動させ、前記揺動検出センサ70(当接検出センサ)のオン/オフ状態を検出し、使用者の身体部位が背凭れ部4を介して施療子8に当接しているか否かを判別する。そしてこの当接判別結果は記憶部35に記憶される。
【0046】
時間計測部40は、後述する各タイマ41,42,43,44をカウントし、所定時間進んだか否かを判別する。
【0047】
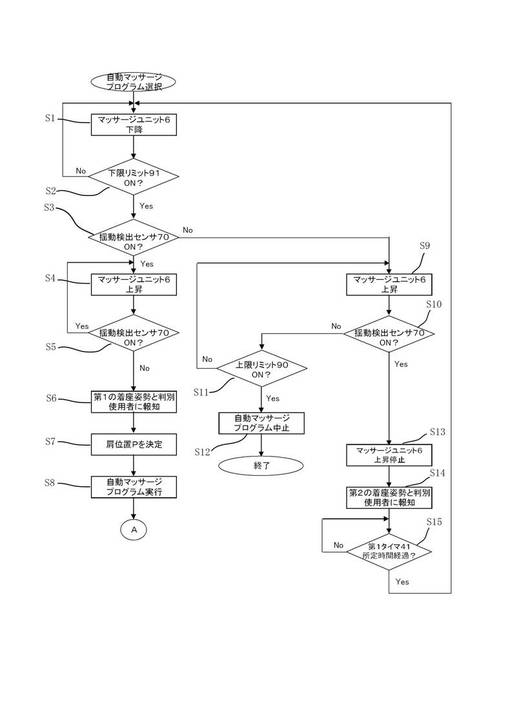
以下、着座姿勢判別から自動マッサージプログラムの開始までの流れの第1実施形態を図9に基づいて詳細に説明する。使用者が操作部100のスイッチ104を選択して、自動マッサージプログラムを決定する。そうすると、マッサージ処理部36が昇降用モータ31を制御してマッサージユニット6を背凭れ部4の内部に設けられたガイドレール(図示せず)に沿って初期位置から下降させる制御を開始する(S1)。ここでいうマッサージユニット6の初期位置とは、マッサージユニット6のホームポジションのことである。図9の実施例ではマッサージユニット6の初期位置は上限位置に設定されている。そして、マッサージユニット6は、下限リミットスイッチ91が接触を検出するまで下降を継続する(S2)。なお、図9のマッサージ機1のマッサージユニット6の初期位置は、背凭れ部4内部の上限に設定されているが、初期位置を下限位置に設定してもよい。そうすれば、マッサージユニット6を下降させるS1とS2を省略することができる。
【0048】
下限リミットスイッチS2が接触を検出すると、当接判別部39がマッサージユニット6の下限位置における揺動検出センサ(当接検出センサ)70のオン/オフを判別し、使用者の腰部付近が背凭れ部4に当接しているか否かを判別する(S3)。具体的には、揺動検出センサ70がオン状態であれば使用者の腰部付近は背凭れ部4に当接している状態であり、揺動検出センサ70がオフ状態であれば、使用者の腰部付近は背凭れ部4に当接していない状態である。そして、記憶部35にマッサージユニット6の下限位置における使用者の背凭れ部4への当接判別結果が記憶される。
【0049】
なお、マッサージユニット6の初期位置が下限位置に設定されている場合は、使用者が操作部100のスイッチ104を選択して、自動マッサージプログラムを決定すると、当接判別部39が初期位置(下限位置)における揺動検出センサ70のオン/オフを判別し、使用者の腰部付近が背凭れ部4に当接しているか否かを判別する。そして、記憶部35にマッサージユニット6の下限位置における使用者の背凭れ部4への当接判別結果が記憶される。
【0050】
続いて、マッサージ処理部36は、昇降用モータ31を制御してマッサージユニット6を背凭れ部4の内部に設けられたガイドレール(図示せず)に沿って下限位置から上昇させる(S4又はS9)。
【0051】
まず、S3において揺動検出センサ70がオンを検出した場合について説明する。マッサージ処理部36は、当接判別部39が揺動検出センサ70のオフを判別するまでマッサージユニット6の上昇を継続するよう制御する(S5)。そして、当接判別部39が揺動検出センサ70のオフを判別すると着座姿勢判別部38が第1の着座姿勢であることを判別し、揺動センサ70がオフ状態となったマッサージユニット6の位置を記憶部35に記憶する(S6)。この第1の着座姿勢は、使用者の腰部付近が背凭れ部4に当接している着座姿勢である。なお、S6において着座姿勢の判別結果を操作部100に設けられた報知手段107としての液晶表示部105やスピーカ106によって使用者に報知するようにしてもよい。
【0052】
続いて肩位置判別部37が、揺動検出センサ70がオフ状態となったマッサージユニット6の位置を使用者の肩位置(特定部位位置)Pと判別する(S7)。そして、マッサージ処理部36は、判別された使用者の肩位置Pに基づいて、マッサージユニット6の上下移動の可動範囲や使用者のツボ位置を算出し、昇降用モータ31、叩き用モータ32、揉み用モータ33、進退用モータ34の一部又は全てを制御して使用者に最も適した自動マッサージプログラムの実行を開始する(S8)。
【0053】
なお、S5において使用者の肩位置とは明らかに異なる異常位置(例えば下限位置から1/3の高さ位置より下方位置)で揺動検出センサ70のオフを検出した場合は、マッサージ処理部36は更にマッサージユニット6の上昇を継続するよう昇降用モータ31を制御してもよい。そして、当接判別部39が揺動検出センサ70のオンを判別することなく、上限リミットスイッチ90の接触を検出した場合は、自動マッサージプログラムの実行を中止してもよい。このように制御することにより、椅子型マッサージ機1に着座しているのが使用者ではなく異物等が載置されている場合の誤作動防止に有効となる。また、上限リミットスイッチ90の接触を検知する前に、前記異常位置より高い位置で揺動検出センサ70のオンを再び検出し、更に前記異常位置より高い位置で再びオフを検出した場合は、再びオフ状態となったマッサージユニット6の位置を使用者の肩位置(特定部位位置)Pと判別してもよい。このように制御することにより、使用者がのけぞってマッサージ機1に着座している場合や、使用者の背筋カーブに凹凸がある場合にも正確に使用者の肩位置Pを判別することができる。
【0054】
次に、S3において揺動検出センサ70がオフを検出した場合について説明する。マッサージ処理部36は、当接判別部39が揺動検出センサ70オンを判別するか、又は上限リミットスイッチS1がマッサージユニット6の接触を検出するまでマッサージユニット6の上昇を継続するよう制御する(S10,S11)。
【0055】
S10とS11を実行し、S11において、揺動検出センサ70がオンを検出することなくオフ状態のまま、上限リミットスイッチ90がマッサージユニット6の接触を検出した場合は、マッサージ処理部36はマッサージユニット6の動作を停止させるよう各モータ31,32,33,34を制御する(S12)。すなわち、マッサージユニット6の初期位置である上限位置で停止することになる。なお、マッサージユニット6の初期位置を下限位置に設定している場合は、上限位置から再び下限位置までマッサージユニット6を下降させて停止するよう各モータ31,32,33,34を制御してもよいし、初期位置をその他の位置に設定している場合は、当該初期位置にマッサージユニット6を移動させて停止するよう各モータ31,32,33,34を制御してもよい。このようにマッサージユニット6の動作を制御することにより、使用者がマッサージ機1に着座していない状態でのマッサージユニット6の作動防止や、子供のいたずら防止などに有効となる。
【0056】
S10において当接判別部39が揺動検出センサ70のオンを判別すると、マッサージ処理部36は昇降用モータ31を制御してマッサージユニット6の上昇を停止させ(S13)、着座姿勢判別部38が第2の着座姿勢であることを判別する(S14)。この第2の着座姿勢は、使用者の腰部付近が背凭れ部4に当接していない着座姿勢である。つまり、この第2の着座姿勢は使用者が座部に浅く腰掛けている着座姿勢である。なお、S14において着座姿勢の判別結果を操作部100に設けられた報知手段107としての液晶表示部105やスピーカ106によって使用者に報知するようにしてもよい。特にS14における使用者への報知内容は、マッサージ機1へ適正な姿勢で座り直すように促す内容とすることができる。例えば、「適正な姿勢で着座できていませんので座り直して下さい。」、「もう少し深く腰掛けて下さい。」や「正確に肩位置を検出することができませんでした。」等を操作部100に設けられた液晶表示部105に文字列としてワイプイン表示したり、スピーカ106から音声アナウンスしたりすることができる。
【0057】
続いて、制御部7の時間計測部40が第1タイマ41のカウントを開始し、予め定めた所定時間が進んだか否かを判断する(S15)。時間計測部40が前記所定時間経過したことを判断すると、マッサージ処理部36が昇降モータ31を制御し、マッサージユニット6を下限位置まで下降させて再び使用者の着座姿勢の判別を開始する。このようにマッサージユニット6の動作を制御することにより、腰部が背凭れ部4に当接していない不適正な第2の着座姿勢を判別した場合に、使用者に適切な姿勢で座り直すよう促し、適正な第1の着座姿勢で正確に肩位置Pを検出することができるため、使用者の体型に合った自動マッサージプログラムを実行可能となる。
【0058】
なお、第2の着座姿勢と判別した場合は、再度の着座姿勢の判別に代えて、自動マッサージプログラムの実行を中止してもよい。あるいはS3で揺動検出センサ70のオフを検出した場合、S9に代えてS12へ移行してもよい。その場合は、マッサージ処理部36は、昇降用モータ31を制御してマッサージユニット6を初期位置(この実施例では上限位置)に移動させて停止させる。このようにマッサージユニット6の動作を制御することにより、不適正な第2の着座姿勢での自動マッサージプログラムの実行を中止することができる。
【0059】
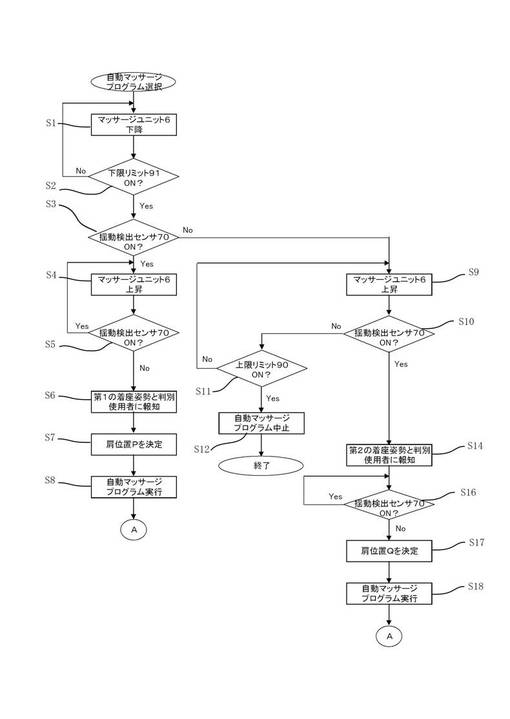
次に、着座姿勢判別から自動マッサージプログラムの開始までの流れの第2実施形態を図10に基づいて詳細に説明する。なお、この第2実施形態において、S14までの流れはS13の動作を行わないことを除いて第1実施形態と同様であるため、同一の符号を付して説明は省略する。
【0060】
第2実施形態では、着座姿勢判別部38が第2の着座姿勢と判別した後(S14)、マッサージ処理部36がマッサージユニット6の上昇を停止させずに上昇を継続させるよう昇降モータ31を制御する。このマッサージユニット6の上昇は、当接判別部39が揺動検出センサ70のオフを判別するまで継続される(S16)。当接判別部39が揺動検出センサ70のオフを判別したら、続いて、肩位置判別部37が揺動検出センサ70がオフ状態となったマッサージユニット6の位置を使用者の肩位置Q(特定部位位置)と判別する(S17)。そして、マッサージ処理部36は、判別された使用者の肩位置Qに基づいて、マッサージユニット6の上下移動の可動範囲や使用者のツボ位置を算出し、昇降用モータ31、叩き用モータ32、揉み用モータ33、進退用モータ34の一部又は全てを制御して使用者に最も適した自動マッサージプログラムの実行を開始する(S18)。
【0061】
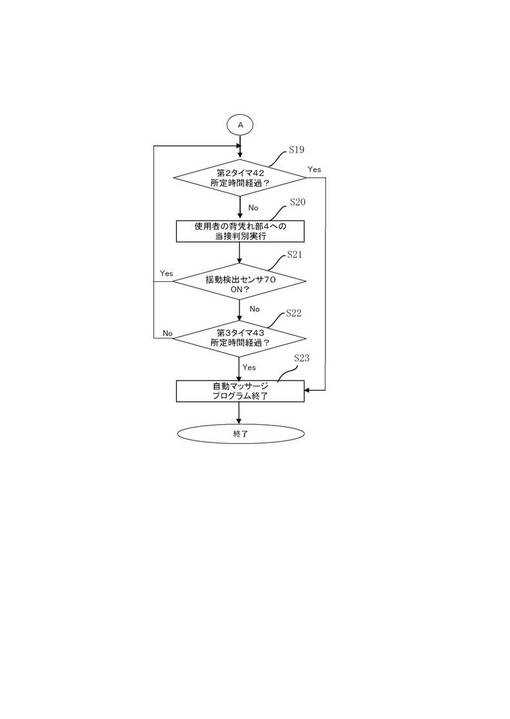
次に、自動マッサージプログラム開始後のマッサージユニット6の動作制御の実施形態について、図11に基づいて詳細に説明する。上述した第1実施形態や第2実施形態で説明したとおり、着座姿勢判別部38が着座姿勢を判別し、マッサージ処理部36が自動マッサージプログラムを開始すると、制御部7の時間計測部40が第2タイマ42のカウントを開始し、予め定めた所定時間が経過するまで自動マッサージプログラムの実行を継続する(S19)。マッサージ処理部36は、前記所定時間が経過するまでマッサージユニット6を、下限位置から肩位置P又はQまでの範囲(施療範囲)において昇降させながらマッサージ動作を行わせる。そして、自動マッサージプログラム実行中に、当接判別部39が使用者の背凭れ部4への当接判別の実行を開始する(S20)。この当接判別は、マッサージユニット6を下限位置から肩位置P又はQまで上昇又は下降させ、その間の揺動検出センサ70のオン/オフを判別することによって行う。マッサージ処理部36は、当接判別部39が下限位置から肩位置P又Qの範囲内(施療範囲内)において揺動検出センサ70のオンを判別した場合には自動マッサージプログラムの実行を継続するよう制御し、下限位置から肩位置P又はQの範囲内の全てにおいて揺動検出センサ70のオフを検出した場合は、制御部7の時間計測部40が第3タイマ43のカウントを開始する(S21)。時間計測部40が、第3タイマに予め定められた所定時間が進んだか否かを判断し(S22)、揺動検出センサ70の前記所定時間オフ状態を判別した場合には、マッサージ処理部36は自動マッサージプログラムの実行を終了する(S23)。
【0062】
このようにマッサージユニット6の動作を制御することにより、自動マッサージプログラムを実行中に使用者がマッサージ機1から所定時間離れた場合、自動マッサージプログラムの実行を終了でき、使用者がマッサージ機1に座っていない状態でのマッサージユニット6の動作を防止できる。
【0063】
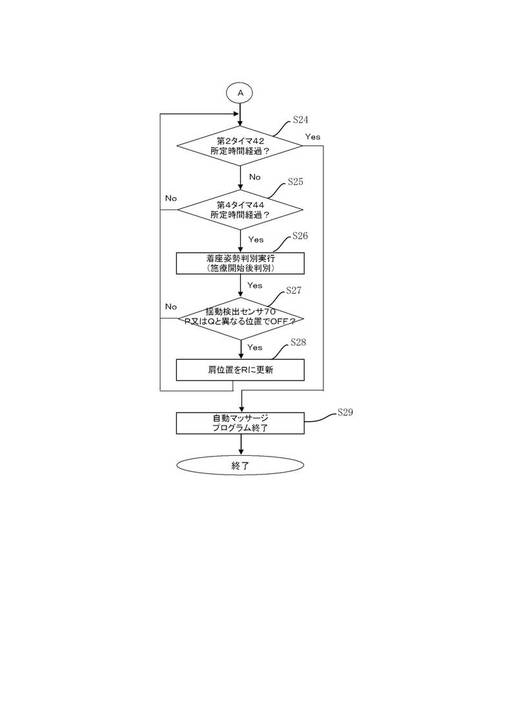
次に、自動マッサージプログラム開始後のマッサージユニット6の動作制御の他の実施形態について、図12に基づいて詳細に説明する。上述した第1実施形態や第2実施形態で説明したとおり、着座姿勢判別部38が着座姿勢を判別し(施療開始前判別)、マッサージ処理部36が自動マッサージプログラムの実行を開始する。
【0064】
続いて、制御部7の時間計測部40が第2タイマ42のカウントを開始し、予め定めた所定時間が経過したか否かを判別する(S24)。前記所定時間が経過していれば、マッサージ処理部36は自動マッサージプログラムを停止する(S29)。前記所定時間が経過していなければ、続いて時間計測部40が第4タイマ44のカウントを開始し、予め定めた所定時間が経過したか否かを判別する(S25)。前記所定時間が経過していれば、着座姿勢判別部38が着座姿勢の再判別を開始し(施療開始後判別)、更に肩位置判別部37が肩位置の再判別を開始する。そして、判別された着座姿勢及び第2位置の肩位置Rが記憶部35に記憶される(S28)。この着座姿勢判別方法及び肩位置判別方法は前述した方法と同様であるので説明は省略する。なお、第4タイマ44に予め定められた前記所定時間が経過していない場合は、引き続き自動マッサージプログラムの実行を継続する。
【0065】
続いて、肩位置判別部37は、記憶部35に記憶された第2位置の肩位置Rが自動マッサージプログラム開始前に判別された第1位置の肩位置Pと異なるか否かを判別する。具体的には、第2位置の肩位置Rが第1位置の肩位置Pより高い位置であるか否かを判別する。また、着座姿勢判別部38は、記憶部35に記憶された施療開始前の着座姿勢と施療開始後の着座姿勢が異なるか否かを判別する(S27)。施療開始前と施療開始後に判別された着座姿勢が異なり、且つ施療開始後に判別された第2位置の肩位置Rが、施療開始前に判別された第1位置の肩位置Pと異なる位置であると判別された場合(具体的には、肩位置Rが肩位置Pよりも高い位置であると判別された場合)には、肩位置Rを肩位置(特定部位)に更新して、自動マッサージプログラムを実行する(S28)。
【0066】
このようにマッサージユニット6の動作を制御することにより、自動マッサージプログラム開始前と開始後に使用者の座る姿勢が変わってしまった場合でも、現状の着座姿勢に基づいて使用者の肩位置(特定部位)を更新して再設定でき、現状の着座姿勢に適した自動マッサージプログラムを実行できる。具体的には、使用者が自動マッサージプログラム開始前に着座姿勢の判別を行い肩位置の設定を行う際、前傾姿勢になって座っていた場合に、適正な肩位置に再設定して、自動マッサージプログラムを実行することができる。
【図面の簡単な説明】
【0067】
【図1】このマッサージ機の実施の一形態を示す斜視図である。
【図2】このマッサージ機の操作部の正面図である。
【図3】このマッサージ機のマッサージユニットの前方からの斜視図である。
【図4】このマッサージ機のマッサージユニットの後方からの斜視図である。
【図5】このマッサージ機の実施の一形態の使用状態を示す概略側面図である。
【図6】このマッサージ機の支持アームと駆動アームの側面図である。
【図7】このマッサージ機の支持アームと駆動アームの概略正面断面図である。
【図8】このマッサージ機の実施の一形態の概略を説明するブロック図である。
【図9】このマッサージ機の制御手段による第1の制御を説明するフロー図である。
【図10】このマッサージ機の制御手段による第2の制御を説明するフロー図である。
【図11】このマッサージ機の制御手段による第3の制御を説明するフロー図である。
【図12】このマッサージ機の制御手段による第4の制御を説明するフロー図である。
【符号の説明】
【0068】
1 マッサージ機
2 座部
3 フットレスト(脚載部)
4 背凭れ部
5 肘掛部
6 マッサージユニット
7 制御手段
8 施療子
16 駆動アーム
18 支持アーム
29 発光素子
30 受光素子
31 昇降用モータ
32 叩き用モータ
33 揉み用モータ
34 進退用モータ
35 記憶部
36 マッサージ処理部
37 肩位置判別部
38 着座姿勢判別部
39 当接判別部
40 時間計測部
70 揺動検出センサ(当接検出センサ)
80 エアユニット
90 上限リミットスイッチ
91 下限リミットスイッチ
100 操作部
107 報知手段
P,Q,R 肩位置(特定部位位置)
【技術分野】
【0001】
本発明は、使用者が着座する座部と、該座部に着座した使用者の上半身を後方から支持する背凭れ部と、使用者の身体部位を施療する施療部を備える椅子型マッサージ機に関し、特に、使用者の身体部位の背凭れ部への当接を検出する当接検出センサを備え、着座姿勢を判別することが可能な椅子型マッサージ機に関するものである。
【背景技術】
【0002】
従来、使用者が着座する座部と、該座部に着座した使用者の上半身を後方から支持する背凭れ部と、使用者の身体部位を施療する施療部と、使用者の身体部位の背凭れ部への当接を検出するセンサを備える椅子型マッサージ機が多数提案されている。このような椅子型マッサージ機の中には、使用者の体型を検出する体型検出手段を備え、揉み玉を使用者に当接させることにより使用者の体型を検出可能になっているものもある(特許文献1参照)。
【特許文献1】特開2002−369851号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1の椅子型マッサージ機では、使用者の体型に合わせて設定したマッサージ箇所やマッサージ強度でマッサージを行うことができる。しかし、ときには使用者の体型に合ったマッサージではない場合もある。例えば、適正な姿勢で着座していなければ使用者の体型を正確に検出することができず、使用者の体型に合ったマッサージを設定することができない。また、正確に使用者の体型を検出したとしても、マッサージ中に使用者の着座姿勢が変わった場合、設定したマッサージが使用者の体型に合ったものではなくなり、十分なマッサージを行うことができない場合がある。
【0004】
そこで本発明は、使用者の着座姿勢を判別して適切なマッサージを行う椅子型マッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、使用者が着座可能な座部と、該座部の後方に設けられる背凭れ部と、使用者の身体部位を施療する施療部と、該施療部の動作を制御する制御部が設けられた椅子型マッサージ機であって、前記施療部は、使用者の身長方向に所定範囲内で上下動可能に設けられ、使用者の身体部位の前記背凭れ部への当接度合の変化を検出する当接検出センサを備え、前記施療部の可動範囲内における所定位置での当接検出に基づいて、使用者の着座姿勢を判別する着座姿勢判別手段を有していることを特徴とする。このような構成とすることにより、使用者の身体部位の当接度合の変化を検出する当接検出センサを備えた施療部を、身長方向に上下動させて使用者の着座姿勢を判別することができる。
【0006】
また、前記着座姿勢判別手段は、前記施療部の可動範囲内における下限位置での当接検出によって、使用者の着座姿勢を判別することが好ましい。このような構成とすることにより、座部に着座した使用者の腰部付近の当接を検出するだけで、使用者の着座姿勢を判別することができる。
【0007】
また、前記着座姿勢判別手段は、前記当接検出センサが前記施療部の可動範囲内における下限位置で使用者の当接を検出し、他の位置で使用者の非当接を検出することにより第1の着座姿勢を判別し、前記当接検出センサが前記下限位置で使用者の非当接を検出し、他の位置で使用者の当接を検出することにより第2の着座姿勢を判別することが好ましい。このような構成とすることにより、座部に着座した使用者の腰部付近と、他の位置の2箇所の当接を検出するだけで、使用者の着座姿勢を判別することができる。
【0008】
また、前記着座姿勢判別手段は、前記施療部が前記施療部の可動範囲内における下限位置から上方に移動する過程で着座姿勢を判別することが好ましい。
【0009】
また、前記着座姿勢判別手段による着座姿勢の判別結果を使用者に報知する報知手段を有していることが好ましい。このような構成とすることにより、使用者に対して着座姿勢を報知し、適正に着座することを促すことができる。
【0010】
また、前記着座姿勢判別手段は、前記施療部による施療動作を開始する前に使用者の着座姿勢の判別を行う施療開始前判別手段と、前記施療部による施療動作中において、更に使用者の着座姿勢の判別を所定回数行う施療開始後判別手段とを有し、前記施療開始前判別手段によって前記第1の着座姿勢を判別することにより前記制御部は前記施療部による施療動作を開始することが好ましい。このような構成とすることにより、施療開始前に検出した着座姿勢が施療中における着座姿勢と異なった場合、再度着座姿勢を判別し、現状の着座姿勢を把握することができる。
【0011】
また、前記施療部による施療動作中において、前記制御部は、前記当接検出センサによる使用者の身体部位の非当接を所定時間継続して検出することにより施療動作を中止するよう制御することが好ましい。このような構成とすることにより、前記施療部による施療動作中に、使用者が所定時間以上継続して、前記椅子型マッサージ機に着座していない場合、施療動作を中止することができる。
【0012】
また、前記施療開始後判別手段による使用者の当接検出において、前記施療開始前判別手段によって使用者の非当接を検出した第1位置とは異なる第2位置で非当接を検出することにより、前記第2位置を使用者の特定部位として設定することが好ましい。このような構成とすることにより、施療開始前に検出した着座姿勢が施療中における着座姿勢と異なった場合、現状の着座姿勢に基づいて使用者の特定部位を再設定することができる。
【0013】
また、前記第2位置は、前記第1位置よりも高い位置であることが好ましい。このような構成とすることにより、施療開始前における使用者の着座姿勢が前傾姿勢となっていた場合、施療中に使用者がより背凭れ部に凭れかかった状態になった場合の着座姿勢に基づいて使用者の特定部位を再設定することができる。
【0014】
また、前記施療開始前判別手段によって前記第2の着座姿勢を判別すると、前記第1の着座姿勢を判別するまで着座姿勢の判別を繰り返すことが好ましい。このような構成とすることにより、使用者の腰部付近が背凭れ部に当接した着座姿勢になるまで、着座姿勢の判別を繰り返すことができる。
【0015】
また、前記施療開始前判別手段によって前記第2の着座姿勢を判別することにより、前記制御部は、前記施療部による施療動作の開始を中止することが好ましい。このような構成とすることにより、使用者の腰部付近が背凭れ部に当接していない姿勢での施療動作の実行を中止できる。
【0016】
また、前記施療部は前後方向へ進退移動可能に構成され、且つ進退量を検出する進退量検出センサを備え、前記着座姿勢判別手段は、前記施療部が上下方向所定間隔で進退量を検出することにより前記背凭れ部と使用者の身体までの距離を測定して使用者の着座姿勢を判別することが好ましい。このような構成とすることにより、上下方向所定間隔で使用者の身体と前記背凭れ部との距離を測定し、使用者の着座姿勢を判別することができる。
【0017】
また、前記制御部は、前記着座姿勢判別手段によって判別された着座姿勢に基づいて前記施療部による施療動作を決定することが好ましい。このような構成とすることにより、使用者の着座姿勢に応じた施療動作を決定し、より効果的な施療を行うことができる。
【発明の効果】
【0018】
本発明によれば、使用者の着座姿勢を判別することができる椅子型マッサージ機を実現することができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施の形態を図面に基づいて説明する。図1はこの発明のマッサージ機の実施の一形態を示す斜視図である。このマッサージ機1は、使用者(被施療者)の臀部及び大腿部を支持する座部2と、使用者の脚及び足裏を支持するフットレスト(脚載部)3と、使用者の背中を支持する背凭れ部4と、左右両側に設けられた使用者の腕を支持する肘掛部5とを備えた椅子型のものである。フットレスト3と背凭れ部4とは、電動駆動機構、流体圧駆動機構又は手動で操作する機構等により、座部に対して角度変更が可能となっている。なお、本明細書において、前記背凭れ部4の幅方向を「左右方向」、高さ方向を「上下方向」、奥行き方向を「前後方向」といい、その他の場合は適宜説明するものとする。
【0020】
座部2には、使用者の臀部及び大腿部を、下部及び側部からマッサージ(押圧)する座部用エア式マッサージ部101が設けられており、このエア式マッサージ部101は複数のエアセル101a,101b,101c,を有している。フットレスト3には、使用者の脹脛、足首、足の甲等の部分をマッサージ(押圧)する脚部用エア式マッサージ部102が設けられており、このエア式マッサージ部102は複数のエアセル102a,102b,102c,102d,102eを有している。背凭れ部4には使用者の左右の肩部、背中の左右両側部、腰の左右両側部をマッサージ(押圧)する背凭れ部用エア式マッサージ部103が設けられており、このエア式マッサージ部103は、複数のエアセル103a,103b,103cを有している。
【0021】
これらエアセルのそれぞれは設置箇所に応じた形状となっており、各エアセルは例えば蛇腹形状であり扇状に膨張することができる。そして、座部2の下方に設けられたエアユニット80によって、各エアセルに対してエアの給排が行われることで、各エアセルは膨縮動作することができる。エアユニット80は切り替え制御弁(図示せず)等を有しており、この椅子型マッサージ機1が備えている制御部7(図8参照)がこの切り替え制御弁を制御することにより、エアセルはそれぞれ独立して動作することができる。
【0022】
図1において、背凭れ部4には、使用者の肩部、背中及び腰部をマッサージするための施療子(モミ玉)8を備えているマッサージユニット(施療部)6が、上下方向に昇降自在に設けられている。このマッサージユニット6は、この椅子型マッサージ機1が備えている制御部7(図8参照)によってその動作が制御される。
【0023】
背凭れ部4の内部には、上下方向に延びる左右一対のガイドレール(図示せず)が延設されており、この両ガイドレール間にマッサージユニット6が走行自在に設けられている。背凭れ部4は中央部に開口部4aと、その両側に使用者の身体(背中)を支持する支持部4bとを有しており、施療子8は開口部内において昇降したり、揉みや叩き等の施療動作をしたりできる。なお、前記エアセル103a,103b,103cは、支持部4bに設けられている。また、背凭れ部4の前面部分は、布製又は革製の可撓性を有するカバー部材9によって覆われている。
【0024】
図2は、操作部100の正面図である。操作部100には、後述する自動マッサージプログラムの実行を開始する各種スイッチ(押しボタン)104、コース内容や後述する着座姿勢の判別結果を使用者に報知する報知手段107としての液晶表示部105やスピーカ106が設けられている。使用者はこの操作部100を操作してマッサージを行う。
【0025】
図3は、マッサージユニット6の前方からの斜視図であり、図4は後方からの斜視図である。このマッサージユニット6は、昇降用モータ31、叩き用モータ32、揉み用モータ33、及び進退用モータ34が配設されている。
【0026】
昇降用モータ31は、マッサージユニット6の右側下方において、その出力軸が前後方向に沿って配設されている。昇降用モータ31の出力は、減速機構等を介して図示しないガイドレールに沿って設けられたラックと噛合する第1ピニオン10に伝達され、マッサージユニット6を昇降させる。
【0027】
また、図5に示すように、マッサージユニット6が上下移動する上下位置に上限リミットスイッチ90が設けられると共に下限位置に下限リミットスイッチ91が設けられており、マッサージユニット6は、この上限位置と下限位置との間を上下移動するように制御部7(図8参照)により制御される。更に、マッサージユニット6の上下方向の移動位置を、昇降用モータ31の回転数等によって検出して制御部7に入力するように構成されている。
【0028】
叩き用モータ32は、マッサージユニット6の中央下方において、その出力軸が左右方向に沿って配設されており、揉み用モータ33は、右側やや上方において、その出力軸が上下方向に沿って配設されている。これら叩き用モータ32、及び揉み用モータ33の出力は、減速機構等を介して所定の部位に伝達され、偏心プーリーや偏心リンク等によって偏心回転や揺動に変換され、使用者の身体(被施療部)をマッサージする施療子8に揉みや叩き動作を行わせる。
【0029】
進退用モータ34は、マッサージユニットの中央左側の後方において、その出力軸が背凭れ部の左右方向に沿うように配設されている。マッサージユニット6は、この進退用モータ34に減速機構等を介して連結された第2ピニオン11と、この第2ピニオン11と噛合し背凭れ部4の前後方向に沿って配設されたラック12とを備えている。進退用モータ34が回転すると、減速機構等を介して進退用モータ34の回転出力が駆動シャフト13に伝達され、駆動シャフト13が回転し、これにより駆動シャフト13に設けられた第2ピニオン11がラック12と噛み合い、マッサージユニット6が前後に移動する。なお、マッサージユニット6の前進位置又は後退位置は、駆動シャフト13や進退用モータ34に設けられたロータリーエンコーダ等(図示せず)によって駆動シャフト13や進退用モータ34の回転数を検出し、この回転数の信号に基づいて判別することができるように構成されている。また、前進位置又は後退位置を判別する他の手段として、磁気センサ(図示でず)を、駆動シャフト13の軸長方向の所定箇所において、円周方向の複数位置に配置された磁石(図示せず)と対向するように、駆動シャフト13の近傍に配置し、周囲の磁気の強さに応じた出力電圧を発生するようにしてもよい。駆動シャフト13が回転した場合には、前記磁気センサの近傍を前記磁石が順次通過するので、制御部7が前記磁気センサからの出力電圧のピークを計数することにより、駆動シャフト13の回転数を検出し、この回転数の信号に基づいてマッサージユニット6の前進位置又は後退位置を判別できる。
【0030】
図4に示すように、マッサージユニット6は、揉み用モータ33と、この揉み用モータ33と連結されモータ33の回転数を減速する減速機構(ギア部)14と、左右両側へ延び減速機構14の出力軸となっている揉み用駆動軸15と、駆動アーム16とを備えている。揉み用モータ33が回転駆動すると、減速機構14を介して揉み用駆動軸15が回転する。揉み用駆動軸15の左右両側には、駆動軸15の軸心に対して偏角した(傾斜した)揉み用クランク軸17が固定されており、この左右の各クランク軸17に前記駆動アーム16の第1基端部46が回転自在に取り付けられている。そして、図3において、この駆動アーム16の先端部45に、ブーメラン状に屈曲した支持アーム18が、その中央屈曲部を中心として、回動自在に連結されている。この支持アーム18の上端部にローラよりなる第1施療子8a、下端部にローラよりなる第2施療子8bが回転自在に取り付けられている。
【0031】
また、マッサージユニット6は、叩き用駆動軸19と、この叩き用駆動軸19を回転可能に支持している軸受け部20と、叩き用駆動軸19を回転駆動する叩き用モータ32とを備えている。叩き用駆動軸19と叩き用モータ32の出力軸(図示せず)は伝動ベルト21によって連動連結されている。また、叩き用駆動軸19の左右両端部には、当該叩き用駆動軸19の軸心に対して偏心している偏心ピン(図示せず)が固定されており、この偏心ピンはユニバーサルジョイントよりなる伝動バー22を介して前記駆動アーム16の第2基端部47に連動連結されている。
【0032】
図6はこのマッサージ機1の支持アームと駆動アームの側面図であり、図7はこのマッサージ機1の支持アーム18と駆動アーム16の概略正面断面図である。前記した施療子8は、ブーメラン状に屈曲した支持アーム18の上下各端部に回転自在に取り付けられ、前記支持アーム18は、その中途部(中央屈曲部)を中心として揺動自在に前記駆動アーム16の先端部45に連結されている。各駆動アーム16は、左右一対の挟持体16aを有し、左右一対の挟持体16aの先端部45aで支持アーム18の中途部を左右に挟んで、支持アーム18及び一対の挟持体16aに挿通したボルトナット23を締結することにより、支持アーム18の中途部が、駆動アーム16の先端部45に、左右方向の軸心24廻りに揺動自在に連結されている。
【0033】
左右一対の支持アーム18は、バネ鋼等で構成した板バネ(バネ板材)によって形成されて左右方向への弾性変形を許容するべく、その板面が左右両側方を向くように背凭れ部4に配置されている。図6に示すように、各支持アーム18にスプリングピン25とストッパー26とが突設され、駆動アーム16に対する支持アーム18の揺動は、図6において支持アーム18を実線で示す如くスプリングピン25が駆動アーム16に当接する下揺動位置aから、図6において支持アーム18を鎖線で示す如くストッパー26が駆動アーム16に当接する上揺動位置bの範囲に規制されている。また、支持アーム18のスプリングピン25と駆動アーム16のスプリングピン25との間に、引っ張りバネ27が設けられ、この引っ張りバネ27によって、支持アーム18を図6に示す矢印c方向(下揺動位置a側)に付勢するようになっている。
【0034】
図6、7に示すように、駆動アーム16の左右一対の挟持体16aに左右方向に貫通するように連通孔28が設けられ、一方の挟持体16aの連通孔28に発光素子(発光ダイオード)29が設けられ、他方の挟持体16aの連通孔28に受光素子(受光トランジスタ)30が設けられ、発光素子29は受光素子30に向けて光を照射し、受光素子30は、発光素子29からの光を受光したときオンし、発光素子29からの光が支持アーム18によって遮光されたときオフするように構成され、この発光素子29と受光素子30とを有する光センサにより、支持アーム18が駆動アーム16に対して所定の揺動範囲になったことを検出する揺動検出センサ70(後述する使用者の身体部位への当接度合を検出する当接検出センサ)が構成されている。
【0035】
そして、マッサージユニット6を使用者の人体に沿って上下方向に移動させることによって、支持アーム18が備える施療子8(第1施療子8a及び第2施療子8b)の使用者の身体部位への当接度合の変化を検出する。具体的には、図5に示す如く第1施療子8aが使用者の肩又は首位置に達したとき、支持アーム18が駆動アーム16に対して図5に示す矢印c方向(下揺動位置a側)に大きく揺動し、このとき、図6に鎖線で示すように発光素子29と受光素子30との間から外れていた支持アーム18が、実線で示す如く下揺動位置a側に揺動して、発光素子29と受光素子30との間を遮光し、その結果支持アーム18が駆動アーム16に対して所定の揺動位置になって施療子8の身体部位への当接度合が弱くなったことを揺動検出センサ70が検出し、使用者の着座姿勢を判別するようになっている。この実施例では、支持アーム18の揺動位置が下揺動位置a側になるほど施療子8の身体部位への当接度合が小さく、上揺動位置b側になるほど施療子8の身体部位への当接度合が大きいことを意味する。
【0036】
次に、マッサージ機1の制御系の構成を説明する。前記揺動検出センサ70により、支持アーム18が駆動アーム16に対して所定の揺動範囲になったことを検出し、ここで検出した検出信号は、マイコン等で構成した制御部7に入力するようになっている。なお、前記揺動検出センサ70は、左右の支持アーム18及び駆動アーム16に対応して夫々左右一対ずつ設けるようにしてもよいし、左右の支持アーム18及び駆動アーム16のいずれか一方のみに対応して1個設けるようにしてもよい。
【0037】
また、図5に示すように、前記マッサージユニット6(それに備えられている支持アーム18)が上下移動する上限位置に上限リミットスイッチ90が設けられると共に、下限位置に下限リミットスイッチ91が設けられており、マッサージユニット6は、この上限位置と下限位置との間を上下移動するように制御部7により制御される。また、マッサージユニット6乃至支持アーム18の上下方向の移動位置を、昇降モータ31の回転数等によって検出して前記制御部7に入力するように構成されている。マイコン等で構成された前記制御部7は、自動コースのプログラム手順に従って各モータ31,32,33,34を制御するようになっている。
【0038】
そして、制御部7は、自動コースを選択したときの初期動作として、マッサージユニット6を使用者の人体に沿って上下に往復移動させるよう制御し(マッサージユニット6によりローリング動作を行わせるよう制御し)、このときのマッサージユニット6の移動位置と、揺動検出センサ70により検出した揺動位置との関係から使用者の着座姿勢を判別し、且つマッサージ機1に対する使用者の人体の特定部位である肩位置を判別するように構成されている。即ち、支持アーム18の揺動が所定の範囲になったとき(施療子8の身体部位への当接度合が所定以下になったとき)の、支持アーム18の移動位置から、マッサージ機1に対する使用者の特定部位の位置を判別する。
【0039】
より具体的には、マッサージユニット6に備えられた支持アーム18を駆動アーム16と共に使用者の人体に沿って上下方向に移動させることによって、図5に示す如く第1施療子8aが使用者の肩又は首位置に達したとき、支持アーム18が駆動アーム16に対して下揺動位置a側に大きく揺動し、このとき、図6に鎖線で示すように発光素子29と受光素子30との間から外れていた支持アーム18が、実線で示す如く下揺動位置a側に揺動して、発光素子29と受光素子30との間を遮蔽し、その結果揺動検出センサ70がオンからオフに切り替わって、支持アーム18が駆動アーム16に対して所定の揺動範囲になったことを揺動検出センサ70が検出する。これは、揺動検出センサ70が、施療子8の身体部位への当接度合が所定以下になったことを検出することに相当する。つまり、揺動検出センサ70は、使用者の身体部位が背凭れ部4を介して施療子8に当接している箇所ではオン状態となり、使用者の身体部位が背凭れ部4を介して施療子8に当接していない箇所ではオフ状態となる使用者の当接検出センサとして機能する。この揺動検出センサ70の検出信号は制御部7に入力され、制御部7は、このときのマッサージユニット6(それに備えられている支持アーム18)の移動位置から、使用者の着座姿勢を判別し、且つマッサージ機1に対する使用者の肩位置(使用者の特定部位の位置)を判別するようになっている。
【0040】
なお、上述した通り揺動検出センサ70を当接検出センサとして用いる実施例を説明したが、当接検出センサはこれに限られるものではない。例えば、施療子8、駆動アーム16、支持アーム18等に設けられた圧力センサ(図示せず)を当接検出センサとして用いてもよい。この場合、施療子8、駆動アーム16、支持アーム18等を介して得られる負荷を検出することで使用者の当接度合を検出できる。
【0041】
図8は、このマッサージ機1の概略のブロック図である。制御部7はCPU、メモリ(RAM)及び記憶装置(ROM)を有するプログラマブルなマイコンよりなり、駆動する各部分の動作制御等のための制御処理を行う。そしてこの制御部7は、所定の各機能を実行するプログラムを記憶装置に格納しており、このプログラムが実行する機能部として、後述する記憶部35、マッサージ処理部36、肩位置判別部(特定部位判別部)37、着座姿勢判別部38、当接判別部39、時間計測部40を備えている。
【0042】
以下、制御部7による各機能部及び各種動作について説明する。制御部7の記憶部35には、複数の自動マッサージプログラムが記憶されており、これに応じたスイッチ104が操作部100に設けられている。自動マッサージプログラムとしては、全身コース、肩コース、腰コース、脚コース等がある。各マッサージプログラムには、前記エア式マッサージ部101,102,103の動作、前記マッサージユニット6の動作(上下動作、進退動作、揉み動作、叩き動作)等の情報が含まれている。そして、制御手段7のマッサージ処理部36は、各マッサージプログラムに従って、前記エア式マッサージ部101,102,103及び前記マッサージユニット6を動作させる処理を行う。例えば、使用者が操作部100のスイッチ104を選択して操作すると、この選択されたスイッチ104に対応したマッサージプログラムを制御部7は選択し、これに応じてマッサージ処理部36はマッサージユニット6にマッサージ動作を行わせる。
【0043】
肩位置判別部37は、前述した通り、施療子8を使用者に当接させた状態で下限位置から上方へマッサージユニット6を移動させ、前記揺動検出センサ70がオンからオフに切り替わって、支持アーム18が駆動アーム16に対して所定の揺動範囲になったことを、揺動検出センサ70が検出したマッサージユニット6の移動位置から使用者の肩位置(特定部位の位置)を判別する。そして、この肩位置(特定部位の位置)は記憶部35に記憶される。そして、前記マッサージ処理部36は、前記手法により判別した使用者の肩位置に基づいて、マッサージユニット6の上下移動の可動範囲や使用者のツボ位置を算出し、昇降用モータ31、叩き用モータ32、揉み用モータ33、進退用モータ34の一部又は全てを制御して使用者に最も適したマッサージを行わせる。
【0044】
着座姿勢判別部38は、着座姿勢判別方法の詳細は後述するが、マッサージユニット6を下方から上方へ上昇させる過程で前記揺動検出センサ70によって使用者の着座姿勢を判別する。そして、この着座姿勢は記憶部35に記憶される。そして、前記マッサージ処理部36は、前記着座姿勢判別部38によって判別された着座姿勢に基づいて、昇降用モータ31、叩き用モータ32、揉み用モータ33、進退用モータ34の一部又は全てを制御して使用者に適した動作をマッサージユニット6に行わせる。
【0045】
当接判別部39は、前述した通り、施療子8を下限位置から上方へマッサージユニット6を移動させ、前記揺動検出センサ70(当接検出センサ)のオン/オフ状態を検出し、使用者の身体部位が背凭れ部4を介して施療子8に当接しているか否かを判別する。そしてこの当接判別結果は記憶部35に記憶される。
【0046】
時間計測部40は、後述する各タイマ41,42,43,44をカウントし、所定時間進んだか否かを判別する。
【0047】
以下、着座姿勢判別から自動マッサージプログラムの開始までの流れの第1実施形態を図9に基づいて詳細に説明する。使用者が操作部100のスイッチ104を選択して、自動マッサージプログラムを決定する。そうすると、マッサージ処理部36が昇降用モータ31を制御してマッサージユニット6を背凭れ部4の内部に設けられたガイドレール(図示せず)に沿って初期位置から下降させる制御を開始する(S1)。ここでいうマッサージユニット6の初期位置とは、マッサージユニット6のホームポジションのことである。図9の実施例ではマッサージユニット6の初期位置は上限位置に設定されている。そして、マッサージユニット6は、下限リミットスイッチ91が接触を検出するまで下降を継続する(S2)。なお、図9のマッサージ機1のマッサージユニット6の初期位置は、背凭れ部4内部の上限に設定されているが、初期位置を下限位置に設定してもよい。そうすれば、マッサージユニット6を下降させるS1とS2を省略することができる。
【0048】
下限リミットスイッチS2が接触を検出すると、当接判別部39がマッサージユニット6の下限位置における揺動検出センサ(当接検出センサ)70のオン/オフを判別し、使用者の腰部付近が背凭れ部4に当接しているか否かを判別する(S3)。具体的には、揺動検出センサ70がオン状態であれば使用者の腰部付近は背凭れ部4に当接している状態であり、揺動検出センサ70がオフ状態であれば、使用者の腰部付近は背凭れ部4に当接していない状態である。そして、記憶部35にマッサージユニット6の下限位置における使用者の背凭れ部4への当接判別結果が記憶される。
【0049】
なお、マッサージユニット6の初期位置が下限位置に設定されている場合は、使用者が操作部100のスイッチ104を選択して、自動マッサージプログラムを決定すると、当接判別部39が初期位置(下限位置)における揺動検出センサ70のオン/オフを判別し、使用者の腰部付近が背凭れ部4に当接しているか否かを判別する。そして、記憶部35にマッサージユニット6の下限位置における使用者の背凭れ部4への当接判別結果が記憶される。
【0050】
続いて、マッサージ処理部36は、昇降用モータ31を制御してマッサージユニット6を背凭れ部4の内部に設けられたガイドレール(図示せず)に沿って下限位置から上昇させる(S4又はS9)。
【0051】
まず、S3において揺動検出センサ70がオンを検出した場合について説明する。マッサージ処理部36は、当接判別部39が揺動検出センサ70のオフを判別するまでマッサージユニット6の上昇を継続するよう制御する(S5)。そして、当接判別部39が揺動検出センサ70のオフを判別すると着座姿勢判別部38が第1の着座姿勢であることを判別し、揺動センサ70がオフ状態となったマッサージユニット6の位置を記憶部35に記憶する(S6)。この第1の着座姿勢は、使用者の腰部付近が背凭れ部4に当接している着座姿勢である。なお、S6において着座姿勢の判別結果を操作部100に設けられた報知手段107としての液晶表示部105やスピーカ106によって使用者に報知するようにしてもよい。
【0052】
続いて肩位置判別部37が、揺動検出センサ70がオフ状態となったマッサージユニット6の位置を使用者の肩位置(特定部位位置)Pと判別する(S7)。そして、マッサージ処理部36は、判別された使用者の肩位置Pに基づいて、マッサージユニット6の上下移動の可動範囲や使用者のツボ位置を算出し、昇降用モータ31、叩き用モータ32、揉み用モータ33、進退用モータ34の一部又は全てを制御して使用者に最も適した自動マッサージプログラムの実行を開始する(S8)。
【0053】
なお、S5において使用者の肩位置とは明らかに異なる異常位置(例えば下限位置から1/3の高さ位置より下方位置)で揺動検出センサ70のオフを検出した場合は、マッサージ処理部36は更にマッサージユニット6の上昇を継続するよう昇降用モータ31を制御してもよい。そして、当接判別部39が揺動検出センサ70のオンを判別することなく、上限リミットスイッチ90の接触を検出した場合は、自動マッサージプログラムの実行を中止してもよい。このように制御することにより、椅子型マッサージ機1に着座しているのが使用者ではなく異物等が載置されている場合の誤作動防止に有効となる。また、上限リミットスイッチ90の接触を検知する前に、前記異常位置より高い位置で揺動検出センサ70のオンを再び検出し、更に前記異常位置より高い位置で再びオフを検出した場合は、再びオフ状態となったマッサージユニット6の位置を使用者の肩位置(特定部位位置)Pと判別してもよい。このように制御することにより、使用者がのけぞってマッサージ機1に着座している場合や、使用者の背筋カーブに凹凸がある場合にも正確に使用者の肩位置Pを判別することができる。
【0054】
次に、S3において揺動検出センサ70がオフを検出した場合について説明する。マッサージ処理部36は、当接判別部39が揺動検出センサ70オンを判別するか、又は上限リミットスイッチS1がマッサージユニット6の接触を検出するまでマッサージユニット6の上昇を継続するよう制御する(S10,S11)。
【0055】
S10とS11を実行し、S11において、揺動検出センサ70がオンを検出することなくオフ状態のまま、上限リミットスイッチ90がマッサージユニット6の接触を検出した場合は、マッサージ処理部36はマッサージユニット6の動作を停止させるよう各モータ31,32,33,34を制御する(S12)。すなわち、マッサージユニット6の初期位置である上限位置で停止することになる。なお、マッサージユニット6の初期位置を下限位置に設定している場合は、上限位置から再び下限位置までマッサージユニット6を下降させて停止するよう各モータ31,32,33,34を制御してもよいし、初期位置をその他の位置に設定している場合は、当該初期位置にマッサージユニット6を移動させて停止するよう各モータ31,32,33,34を制御してもよい。このようにマッサージユニット6の動作を制御することにより、使用者がマッサージ機1に着座していない状態でのマッサージユニット6の作動防止や、子供のいたずら防止などに有効となる。
【0056】
S10において当接判別部39が揺動検出センサ70のオンを判別すると、マッサージ処理部36は昇降用モータ31を制御してマッサージユニット6の上昇を停止させ(S13)、着座姿勢判別部38が第2の着座姿勢であることを判別する(S14)。この第2の着座姿勢は、使用者の腰部付近が背凭れ部4に当接していない着座姿勢である。つまり、この第2の着座姿勢は使用者が座部に浅く腰掛けている着座姿勢である。なお、S14において着座姿勢の判別結果を操作部100に設けられた報知手段107としての液晶表示部105やスピーカ106によって使用者に報知するようにしてもよい。特にS14における使用者への報知内容は、マッサージ機1へ適正な姿勢で座り直すように促す内容とすることができる。例えば、「適正な姿勢で着座できていませんので座り直して下さい。」、「もう少し深く腰掛けて下さい。」や「正確に肩位置を検出することができませんでした。」等を操作部100に設けられた液晶表示部105に文字列としてワイプイン表示したり、スピーカ106から音声アナウンスしたりすることができる。
【0057】
続いて、制御部7の時間計測部40が第1タイマ41のカウントを開始し、予め定めた所定時間が進んだか否かを判断する(S15)。時間計測部40が前記所定時間経過したことを判断すると、マッサージ処理部36が昇降モータ31を制御し、マッサージユニット6を下限位置まで下降させて再び使用者の着座姿勢の判別を開始する。このようにマッサージユニット6の動作を制御することにより、腰部が背凭れ部4に当接していない不適正な第2の着座姿勢を判別した場合に、使用者に適切な姿勢で座り直すよう促し、適正な第1の着座姿勢で正確に肩位置Pを検出することができるため、使用者の体型に合った自動マッサージプログラムを実行可能となる。
【0058】
なお、第2の着座姿勢と判別した場合は、再度の着座姿勢の判別に代えて、自動マッサージプログラムの実行を中止してもよい。あるいはS3で揺動検出センサ70のオフを検出した場合、S9に代えてS12へ移行してもよい。その場合は、マッサージ処理部36は、昇降用モータ31を制御してマッサージユニット6を初期位置(この実施例では上限位置)に移動させて停止させる。このようにマッサージユニット6の動作を制御することにより、不適正な第2の着座姿勢での自動マッサージプログラムの実行を中止することができる。
【0059】
次に、着座姿勢判別から自動マッサージプログラムの開始までの流れの第2実施形態を図10に基づいて詳細に説明する。なお、この第2実施形態において、S14までの流れはS13の動作を行わないことを除いて第1実施形態と同様であるため、同一の符号を付して説明は省略する。
【0060】
第2実施形態では、着座姿勢判別部38が第2の着座姿勢と判別した後(S14)、マッサージ処理部36がマッサージユニット6の上昇を停止させずに上昇を継続させるよう昇降モータ31を制御する。このマッサージユニット6の上昇は、当接判別部39が揺動検出センサ70のオフを判別するまで継続される(S16)。当接判別部39が揺動検出センサ70のオフを判別したら、続いて、肩位置判別部37が揺動検出センサ70がオフ状態となったマッサージユニット6の位置を使用者の肩位置Q(特定部位位置)と判別する(S17)。そして、マッサージ処理部36は、判別された使用者の肩位置Qに基づいて、マッサージユニット6の上下移動の可動範囲や使用者のツボ位置を算出し、昇降用モータ31、叩き用モータ32、揉み用モータ33、進退用モータ34の一部又は全てを制御して使用者に最も適した自動マッサージプログラムの実行を開始する(S18)。
【0061】
次に、自動マッサージプログラム開始後のマッサージユニット6の動作制御の実施形態について、図11に基づいて詳細に説明する。上述した第1実施形態や第2実施形態で説明したとおり、着座姿勢判別部38が着座姿勢を判別し、マッサージ処理部36が自動マッサージプログラムを開始すると、制御部7の時間計測部40が第2タイマ42のカウントを開始し、予め定めた所定時間が経過するまで自動マッサージプログラムの実行を継続する(S19)。マッサージ処理部36は、前記所定時間が経過するまでマッサージユニット6を、下限位置から肩位置P又はQまでの範囲(施療範囲)において昇降させながらマッサージ動作を行わせる。そして、自動マッサージプログラム実行中に、当接判別部39が使用者の背凭れ部4への当接判別の実行を開始する(S20)。この当接判別は、マッサージユニット6を下限位置から肩位置P又はQまで上昇又は下降させ、その間の揺動検出センサ70のオン/オフを判別することによって行う。マッサージ処理部36は、当接判別部39が下限位置から肩位置P又Qの範囲内(施療範囲内)において揺動検出センサ70のオンを判別した場合には自動マッサージプログラムの実行を継続するよう制御し、下限位置から肩位置P又はQの範囲内の全てにおいて揺動検出センサ70のオフを検出した場合は、制御部7の時間計測部40が第3タイマ43のカウントを開始する(S21)。時間計測部40が、第3タイマに予め定められた所定時間が進んだか否かを判断し(S22)、揺動検出センサ70の前記所定時間オフ状態を判別した場合には、マッサージ処理部36は自動マッサージプログラムの実行を終了する(S23)。
【0062】
このようにマッサージユニット6の動作を制御することにより、自動マッサージプログラムを実行中に使用者がマッサージ機1から所定時間離れた場合、自動マッサージプログラムの実行を終了でき、使用者がマッサージ機1に座っていない状態でのマッサージユニット6の動作を防止できる。
【0063】
次に、自動マッサージプログラム開始後のマッサージユニット6の動作制御の他の実施形態について、図12に基づいて詳細に説明する。上述した第1実施形態や第2実施形態で説明したとおり、着座姿勢判別部38が着座姿勢を判別し(施療開始前判別)、マッサージ処理部36が自動マッサージプログラムの実行を開始する。
【0064】
続いて、制御部7の時間計測部40が第2タイマ42のカウントを開始し、予め定めた所定時間が経過したか否かを判別する(S24)。前記所定時間が経過していれば、マッサージ処理部36は自動マッサージプログラムを停止する(S29)。前記所定時間が経過していなければ、続いて時間計測部40が第4タイマ44のカウントを開始し、予め定めた所定時間が経過したか否かを判別する(S25)。前記所定時間が経過していれば、着座姿勢判別部38が着座姿勢の再判別を開始し(施療開始後判別)、更に肩位置判別部37が肩位置の再判別を開始する。そして、判別された着座姿勢及び第2位置の肩位置Rが記憶部35に記憶される(S28)。この着座姿勢判別方法及び肩位置判別方法は前述した方法と同様であるので説明は省略する。なお、第4タイマ44に予め定められた前記所定時間が経過していない場合は、引き続き自動マッサージプログラムの実行を継続する。
【0065】
続いて、肩位置判別部37は、記憶部35に記憶された第2位置の肩位置Rが自動マッサージプログラム開始前に判別された第1位置の肩位置Pと異なるか否かを判別する。具体的には、第2位置の肩位置Rが第1位置の肩位置Pより高い位置であるか否かを判別する。また、着座姿勢判別部38は、記憶部35に記憶された施療開始前の着座姿勢と施療開始後の着座姿勢が異なるか否かを判別する(S27)。施療開始前と施療開始後に判別された着座姿勢が異なり、且つ施療開始後に判別された第2位置の肩位置Rが、施療開始前に判別された第1位置の肩位置Pと異なる位置であると判別された場合(具体的には、肩位置Rが肩位置Pよりも高い位置であると判別された場合)には、肩位置Rを肩位置(特定部位)に更新して、自動マッサージプログラムを実行する(S28)。
【0066】
このようにマッサージユニット6の動作を制御することにより、自動マッサージプログラム開始前と開始後に使用者の座る姿勢が変わってしまった場合でも、現状の着座姿勢に基づいて使用者の肩位置(特定部位)を更新して再設定でき、現状の着座姿勢に適した自動マッサージプログラムを実行できる。具体的には、使用者が自動マッサージプログラム開始前に着座姿勢の判別を行い肩位置の設定を行う際、前傾姿勢になって座っていた場合に、適正な肩位置に再設定して、自動マッサージプログラムを実行することができる。
【図面の簡単な説明】
【0067】
【図1】このマッサージ機の実施の一形態を示す斜視図である。
【図2】このマッサージ機の操作部の正面図である。
【図3】このマッサージ機のマッサージユニットの前方からの斜視図である。
【図4】このマッサージ機のマッサージユニットの後方からの斜視図である。
【図5】このマッサージ機の実施の一形態の使用状態を示す概略側面図である。
【図6】このマッサージ機の支持アームと駆動アームの側面図である。
【図7】このマッサージ機の支持アームと駆動アームの概略正面断面図である。
【図8】このマッサージ機の実施の一形態の概略を説明するブロック図である。
【図9】このマッサージ機の制御手段による第1の制御を説明するフロー図である。
【図10】このマッサージ機の制御手段による第2の制御を説明するフロー図である。
【図11】このマッサージ機の制御手段による第3の制御を説明するフロー図である。
【図12】このマッサージ機の制御手段による第4の制御を説明するフロー図である。
【符号の説明】
【0068】
1 マッサージ機
2 座部
3 フットレスト(脚載部)
4 背凭れ部
5 肘掛部
6 マッサージユニット
7 制御手段
8 施療子
16 駆動アーム
18 支持アーム
29 発光素子
30 受光素子
31 昇降用モータ
32 叩き用モータ
33 揉み用モータ
34 進退用モータ
35 記憶部
36 マッサージ処理部
37 肩位置判別部
38 着座姿勢判別部
39 当接判別部
40 時間計測部
70 揺動検出センサ(当接検出センサ)
80 エアユニット
90 上限リミットスイッチ
91 下限リミットスイッチ
100 操作部
107 報知手段
P,Q,R 肩位置(特定部位位置)
【特許請求の範囲】
【請求項1】
使用者が着座可能な座部と、該座部の後方に設けられる背凭れ部と、使用者の身体部位を施療する施療部と、該施療部の動作を制御する制御部が設けられた椅子型マッサージ機であって、
前記施療部は、使用者の身長方向に所定範囲内で上下動可能に設けられ、使用者の身体部位の前記背凭れ部への当接度合の変化を検出する当接検出センサを備え、
前記施療部の可動範囲内における所定位置での当接検出に基づいて、使用者の着座姿勢を判別する着座姿勢判別手段を有している
ことを特徴とする椅子型マッサージ機。
【請求項2】
前記着座姿勢判別手段は、前記施療部の可動範囲内における下限位置での当接検出によって、使用者の着座姿勢を判別することを特徴とする請求項1記載の椅子型マッサージ機。
【請求項3】
前記着座姿勢判別手段は、前記当接検出センサが前記施療部の可動範囲内における下限位置で使用者の当接を検出し、他の位置で使用者の非当接を検出することにより第1の着座姿勢を判別し、
前記当接検出センサが前記下限位置で使用者の非当接を検出し、他の位置で使用者の当接を検出することにより第2の着座姿勢を判別することを特徴とする請求項2記載の椅子型マッサージ機。
【請求項4】
前記着座姿勢判別手段は、前記施療部が前記施療部の可動範囲内における下限位置から上方に移動する過程で着座姿勢を判別することを特徴とする請求項1〜3のいずれかに記載の椅子型マッサージ機。
【請求項5】
前記着座姿勢判別手段による着座姿勢の判別結果を使用者に報知する報知手段を有していることを特徴とする請求項1〜4のいずれかに記載の椅子型マッサージ機。
【請求項6】
前記着座姿勢判別手段は、
前記施療部による施療動作を開始する前に使用者の着座姿勢の判別を行う施療開始前判別手段と、
前記施療部による施療動作中において、更に使用者の着座姿勢の判別を所定回数行う施療開始後判別手段とを有し、
前記施療開始前判別手段によって前記第1の着座姿勢を判別することにより前記制御部は前記施療部による施療動作を開始することを特徴とする請求項3〜5のいずれかに記載の椅子型マッサージ機。
【請求項7】
前記施療部による施療動作中において、前記制御部は、前記当接検出センサによる使用者の身体部位の非当接を所定時間継続して検出することにより施療動作を中止するよう制御することを特徴とする請求項6に記載の椅子型マッサージ機。
【請求項8】
前記施療開始後判別手段による使用者の当接検出において、
前記施療開始前判別手段によって使用者の非当接を検出した第1位置とは異なる第2位置で非当接を検出することにより、
前記第2位置を使用者の特定部位として設定することを特徴とする請求項6に記載の椅子型マッサージ機。
【請求項9】
前記第2位置は、前記第1位置よりも高い位置であることを特徴とする請求項8に記載の椅子型マッサージ機。
【請求項10】
前記施療開始前判別手段によって前記第2の着座姿勢を判別すると、前記第1の着座姿勢を判別するまで着座姿勢の判別を繰り返すことを特徴とする請求項3〜9のいずれかに記載の椅子型マッサージ機。
【請求項11】
前記施療開始前判別手段によって前記第2の着座姿勢を判別することにより、前記制御部は、前記施療部による施療動作の開始を中止することを特徴とする請求項3〜9のいずれかに記載の椅子型マッサージ機。
【請求項12】
前記施療部は前後方向へ進退移動可能に構成され、且つ進退量を検出する進退量検出センサを備え、
前記着座姿勢判別手段は、
前記施療部が上下方向所定間隔で進退量を検出することにより前記背凭れ部と使用者の身体部位までの距離を測定して使用者の着座姿勢を判別することを特徴とする請求項1に記載の椅子型マッサージ機。
【請求項13】
前記制御部は、前記着座姿勢判別手段によって判別された着座姿勢に基づいて前記施療部による施療動作を決定することを特徴とする請求項12記載の椅子型マッサージ機。
【請求項1】
使用者が着座可能な座部と、該座部の後方に設けられる背凭れ部と、使用者の身体部位を施療する施療部と、該施療部の動作を制御する制御部が設けられた椅子型マッサージ機であって、
前記施療部は、使用者の身長方向に所定範囲内で上下動可能に設けられ、使用者の身体部位の前記背凭れ部への当接度合の変化を検出する当接検出センサを備え、
前記施療部の可動範囲内における所定位置での当接検出に基づいて、使用者の着座姿勢を判別する着座姿勢判別手段を有している
ことを特徴とする椅子型マッサージ機。
【請求項2】
前記着座姿勢判別手段は、前記施療部の可動範囲内における下限位置での当接検出によって、使用者の着座姿勢を判別することを特徴とする請求項1記載の椅子型マッサージ機。
【請求項3】
前記着座姿勢判別手段は、前記当接検出センサが前記施療部の可動範囲内における下限位置で使用者の当接を検出し、他の位置で使用者の非当接を検出することにより第1の着座姿勢を判別し、
前記当接検出センサが前記下限位置で使用者の非当接を検出し、他の位置で使用者の当接を検出することにより第2の着座姿勢を判別することを特徴とする請求項2記載の椅子型マッサージ機。
【請求項4】
前記着座姿勢判別手段は、前記施療部が前記施療部の可動範囲内における下限位置から上方に移動する過程で着座姿勢を判別することを特徴とする請求項1〜3のいずれかに記載の椅子型マッサージ機。
【請求項5】
前記着座姿勢判別手段による着座姿勢の判別結果を使用者に報知する報知手段を有していることを特徴とする請求項1〜4のいずれかに記載の椅子型マッサージ機。
【請求項6】
前記着座姿勢判別手段は、
前記施療部による施療動作を開始する前に使用者の着座姿勢の判別を行う施療開始前判別手段と、
前記施療部による施療動作中において、更に使用者の着座姿勢の判別を所定回数行う施療開始後判別手段とを有し、
前記施療開始前判別手段によって前記第1の着座姿勢を判別することにより前記制御部は前記施療部による施療動作を開始することを特徴とする請求項3〜5のいずれかに記載の椅子型マッサージ機。
【請求項7】
前記施療部による施療動作中において、前記制御部は、前記当接検出センサによる使用者の身体部位の非当接を所定時間継続して検出することにより施療動作を中止するよう制御することを特徴とする請求項6に記載の椅子型マッサージ機。
【請求項8】
前記施療開始後判別手段による使用者の当接検出において、
前記施療開始前判別手段によって使用者の非当接を検出した第1位置とは異なる第2位置で非当接を検出することにより、
前記第2位置を使用者の特定部位として設定することを特徴とする請求項6に記載の椅子型マッサージ機。
【請求項9】
前記第2位置は、前記第1位置よりも高い位置であることを特徴とする請求項8に記載の椅子型マッサージ機。
【請求項10】
前記施療開始前判別手段によって前記第2の着座姿勢を判別すると、前記第1の着座姿勢を判別するまで着座姿勢の判別を繰り返すことを特徴とする請求項3〜9のいずれかに記載の椅子型マッサージ機。
【請求項11】
前記施療開始前判別手段によって前記第2の着座姿勢を判別することにより、前記制御部は、前記施療部による施療動作の開始を中止することを特徴とする請求項3〜9のいずれかに記載の椅子型マッサージ機。
【請求項12】
前記施療部は前後方向へ進退移動可能に構成され、且つ進退量を検出する進退量検出センサを備え、
前記着座姿勢判別手段は、
前記施療部が上下方向所定間隔で進退量を検出することにより前記背凭れ部と使用者の身体部位までの距離を測定して使用者の着座姿勢を判別することを特徴とする請求項1に記載の椅子型マッサージ機。
【請求項13】
前記制御部は、前記着座姿勢判別手段によって判別された着座姿勢に基づいて前記施療部による施療動作を決定することを特徴とする請求項12記載の椅子型マッサージ機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−89872(P2009−89872A)
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願番号】特願2007−262916(P2007−262916)
【出願日】平成19年10月9日(2007.10.9)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願日】平成19年10月9日(2007.10.9)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]