
椅子型マッサージ機
【課題】脚載せ部を上下回動させるための機器および脚載せ部の不具合の発生を防止することができる椅子型マッサージ機を提供する。
【解決手段】床面Fに置かれる本体フレーム7と、この本体フレーム7に設けられ使用者が着座する座部1と、本体フレーム7の前部に左右方向の軸心C1回りに回動自在として取り付けられた脚載せ部2と、この脚載せ部2を軸C1心回りに上下回動させる脚駆動部5と、脚載せ部2に設けられたマッサージ具とを備えている。上に回動した状態にある脚載せ部2に対して上から異常荷重F0が作用すると、当該脚載せ部2を下へ回動させる退避手段8aを備えている。
【解決手段】床面Fに置かれる本体フレーム7と、この本体フレーム7に設けられ使用者が着座する座部1と、本体フレーム7の前部に左右方向の軸心C1回りに回動自在として取り付けられた脚載せ部2と、この脚載せ部2を軸C1心回りに上下回動させる脚駆動部5と、脚載せ部2に設けられたマッサージ具とを備えている。上に回動した状態にある脚載せ部2に対して上から異常荷重F0が作用すると、当該脚載せ部2を下へ回動させる退避手段8aを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、上下回動する脚載せ部を備えた椅子型マッサージ機に関する。
【背景技術】
【0002】
使用者が脚を載せる脚載せ部を備え、この脚載せ部が上下回動する椅子型マッサージ機が知られている。このような椅子型マッサージ機は、床面に置かれる本体フレームと、この本体フレームに設けられ使用者が着座する座部と、前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚載せ部と、この脚載せ部を前記軸心回りに上下回動させる脚駆動部と、前記脚載せ部に設けられたマッサージ具とを備えている(例えば、特許文献1参照)。
【0003】
前記脚駆動部は、モータの回転によって伸縮する伸縮アクチュエータであり、この伸縮アクチュエータの基部が前記本体フレームに軸によって回動自在に取り付けられ、先部が前記脚載せ部の脚フレームに軸によって回動自在に取り付けられている。この構成によれば、伸縮アクチュエータが伸張すると脚載せ部を上に押し上げて回動させることができ、伸縮アクチュエータが短縮すると脚載せ部を引き下げて回動させることができる。
このように、脚駆動部によって脚載せ部を上に回動させた状態とすることで、使用者の脚をリラックスさせたり、この脚載せ部に保持された使用者の脚に対して前記マッサージ具によりマッサージを行ったりすることができる。そして、椅子型マッサージ機の不使用時には、脚載せ部を下へ回動させて降ろし、脚載せ部が邪魔にならないようにすることができる。
【0004】
【特許文献1】特開2006−288488号公報(図3参照)
【発明の開示】
【発明が解決しようとする課題】
【0005】
前記伸縮アクチュエータの基部は軸によって本体フレームに連結されていて、先部は軸によって脚載せ部の脚フレームに連結されている。このため、脚載せ部を上に回動させた状態で、使用者の脚以外の重たいものがこの脚載せ部に載ると、脚載せ部、伸縮アクチュエータおよびその連結部に過大な力が作用し、これらに不具合が生じてしまうおそれがある。
また、上に回動した状態にあった脚載せ部を下へ回動させる途中で、床面と脚載せ部との間に障害物が存在していると、脚載せ部がこの障害物に当接し、伸縮アクチュエータは無理に脚載せ部を引き下げようとする。このため、脚載せ部、伸縮アクチュエータおよびその連結部に過大な力が作用し、これらに不具合が生じてしまうおそれがある。
【0006】
前記のように、脚載せ部を上下回動させる構成を採用することによって、使用者をリラックスさせたりすることができるが、このような構成を採用することで、前記のように非常時に機器に不具合を生じさせてしまうおそれがある。
そこで本発明は、脚載せ部を上下回動させるための機器および脚載せ部の不具合の発生を防止することができる椅子型マッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の椅子型マッサージ機は、床面に置かれる本体フレームと、この本体フレームに設けられ使用者が着座する座部と、前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚載せ部と、前記脚載せ部を前記軸心回りに上下回動させる脚駆動部と、前記座部と前記脚載せ部との内の少なくとも一方に設けられたマッサージ具とを備えた椅子型マッサージ機であって、上に回動した状態にある前記脚載せ部に対して上から異常荷重が作用すると、当該脚載せ部を下へ回動させる退避手段を備えている(発明1)。
本発明によれば、上に回動した状態にある脚載せ部に対して上から異常荷重が作用すると、退避手段は、その脚載せ部を下方へ回動させるので、前記異常荷重を脚載せ部からいなすことができ、脚駆動部や脚載せ部が損傷することを防止することができる。
【0008】
そして、前記退避手段が、前記異常荷重を検出するためのセンサと、このセンサの検出信号に基づいて前記脚駆動部によって前記脚載せ部を下へ回動させる制御をする制御部とを有している構成とした場合、前記センサによって前記異常荷重が検出されると、制御部は脚駆動部によって脚載せ部を下方へ回動させ、前記異常荷重を脚載せ部からいなすことができる。
または、前記椅子型マッサージ機の前記脚駆動部は、基部が前記本体フレームに回動自在に取り付けられかつ伸張することで前記脚載せ部を押し上げて回動させる伸縮アクチュエータを有していて、前記退避手段が、前記異常荷重が作用すると、前記伸縮アクチュエータの全長を変えないで、当該伸縮アクチュエータの先部を前記脚載せ部の脚先側へ移動させることにより前記脚載せ部を下へ回動させるガイド部を有している構成とした場合、脚載せ部に前記異常荷重が作用すると、ガイド部によって、伸縮アクチュエータの全長を変えないで、伸縮アクチュエータの先部を脚載せ部の脚先側へ移動させることにより、この伸縮アクチュエータは基部を中心として下方へ回動し、これと同時に脚載せ部を下へ回動させることができ、前記異常荷重を脚載せ部からいなすことができる。
【0009】
また、本発明は、床面に置かれる本体フレームと、この本体フレームに設けられ使用者が着座する座部と、使用者が脚を載せる脚本体部と、この脚本体部を支持しかつ前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚フレームとを有する脚載せ部と、前記脚フレームを前記軸心回りに上下回動させる脚駆動部と、前記座部と前記脚本体部との内の少なくとも一方に設けられたマッサージ具とを備えた椅子型マッサージ機であって、前記脚駆動部は、前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられ、かつ、前記脚フレームを背面側から支持する第一アームと、前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられ、前記第一アームを上に載せた状態で背面側から支持することができ、かつ、前記第一アームとは回動方向の下方へ分離可能な第二アームと、伸張することで前記第二アームを押し上げて前記軸心回りに回動させかつ短縮することで前記第二アームを引き下げて前記軸心回りに回動させる伸縮アクチュエータとを有し、前記第一アームの先端が前記第二アームの先端よりも前記脚載せ部の脚先側に位置するように、前記第一アームは前記第二アームよりも長く設定されている(発明2)。
【0010】
本発明によれば、脚駆動部によって脚フレームを上下回動させる際、脚フレームにはモーメントが作用するが、この脚フレームを背面側から支持している第一アームは、第二アームよりも長いことから、(第一アームが短い場合よりも)モーメントアームを大きくすることができる。このため、第一アームが脚フレームを支持するために必要な力を小さくすることができ、この反力として脚フレームに作用する荷重も小さくなるので、脚フレームをとりわけ強固に形成する必要がなくなり、重量の軽減につながる。
しかし、第一アームが長くなると、第一アームが下に回動している途中で床面との間に存在する障害物に接触しやすくなる。そこで本発明では、第一アームおよび第二アームは共に、本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられていて、第二アームは、第一アームを背面側から支持することができ、かつ、第一アームとは回動方向の下方へ分離可能であるため、第一アームが下に回動している途中で前記障害物に接触しても、この第一アームを残して伸縮アクチュエータは第二アームのみを引き下げるようにして短縮し続けることができる。このため、伸縮アクチュエータは、第一アームおよび脚フレームを無理に下へ回動させず、伸縮アクチュエータ、第一アームおよび脚フレームに無理な力が作用しないため、これらに不具合が生じることを防止することができる。そして、第二アームは第一アームよりも短いので、第二アームは第一アームと比べて床面との間に障害物が存在しにくい構成となっている。
【0011】
また、この椅子型マッサージ機は、上に回動した状態にある前記脚載せ部に対して上から異常荷重が作用すると、当該脚載せ部を下へ回動させる退避手段を更に備え、前記脚フレームは、前記異常荷重が作用すると、前記第一アームに対して回動方向の下へ位置変化するように設けられていて、前記退避手段は、前記位置変化を検出するセンサと、このセンサの検出信号に基づいて前記伸縮アクチュエータを短縮させ前記脚フレームを下へ回動させる制御をする制御部とを有するのが好ましい。
この構成によれば、上に回動した状態にある脚載せ部に対して上から異常荷重が作用すると、脚フレームは第一アームに対して回動方向の下へ位置変化する。センサがこの位置変化を検出すると、制御部は、伸縮アクチュエータを短縮させ脚フレームを下へ回動させるので、前記異常荷重を脚載せ部からいなすことができ、伸縮アクチュエータおよび脚フレームに不具合が生じることを防止することができる。
【発明の効果】
【0012】
前記発明1によれば、脚載せ部に上から異常荷重が作用しても、その異常荷重を脚載せ部からいなすことができ、機器の不具合の発生を防止することができる。また、前記発明2によれば、脚載せ部が下へ回動する際に、脚載せ部を背面側から支持しているアームが床面との間に存在している障害物に接触しても、無理な力が作用しないため、機器の不具合の発生を防止することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を図面に基づいて説明する。
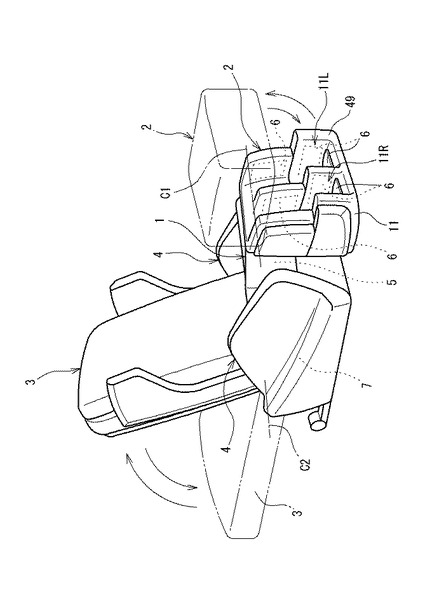
図1は本発明の椅子型マッサージ機の実施の一形態を示す斜視図である。この椅子型マッサージ機は、使用者が着座する座部1と、使用者が脚を載せる脚載せ部2と、使用者が凭れる背凭れ部3と、使用者が左右の腕を載せる左右の肘掛け部4とを備えている。また、この椅子型マッサージ機は、床面に置かれ椅子本体の骨格を形成している本体フレーム7を備えている。
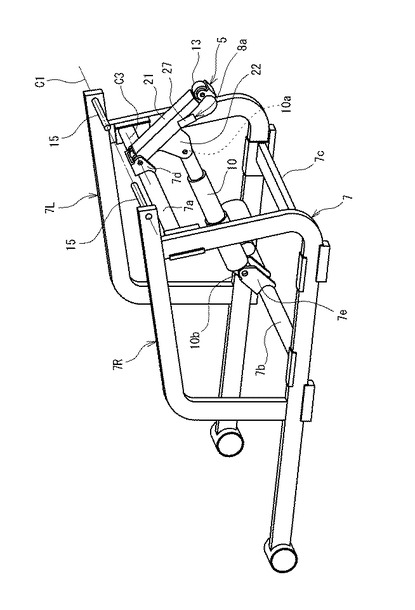
座部1は本体フレーム7の上部に設けられている。脚載せ部2は、本体フレーム7の前部に左右方向の軸心C1回りに回動自在として取り付けられている。また、椅子型マッサージ機は、脚載せ部2を軸心C1回りに上下回動させる脚駆動部5を備えている。図2は、本体フレーム7および脚駆動部5の斜視図である。
【0014】
脚載せ部2にはマッサージ具6が設けられていて(図1参照)、このマッサージ具6は、エアの供給または排出によって膨張または収縮するエアセルである。本体フレーム7内に設けられたエア供給ユニット(図示せず)からエアが供給されることによってエアセルは膨張し、使用者の脚を押圧する。一方、エア供給ユニットが排気状態となると、エアセルは収縮する。
背凭れ部3は、左右方向の水平軸心C2回りに回動自在であり、座部1と背凭れ部3との間に設けられたアクチュエータ(図示せず)によってリクライニング動作をする。
【0015】
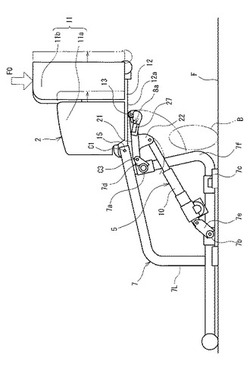
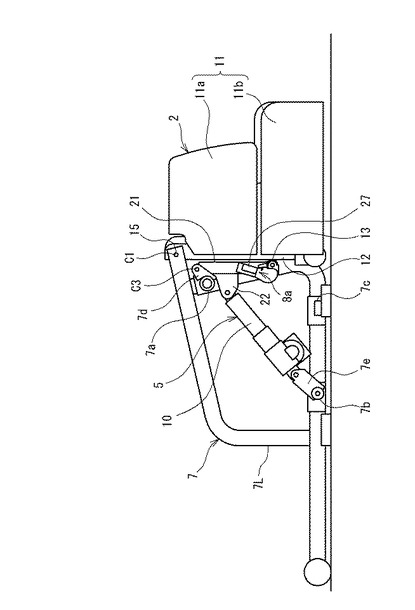
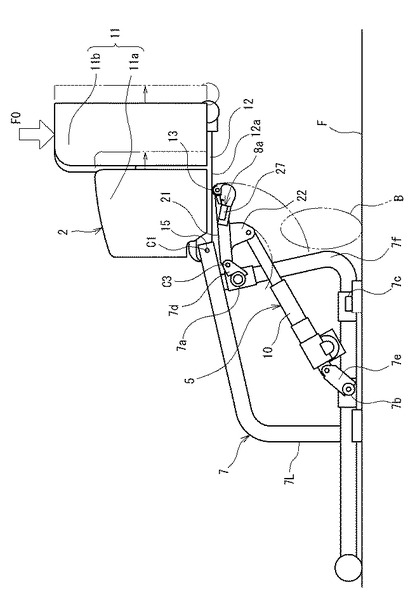
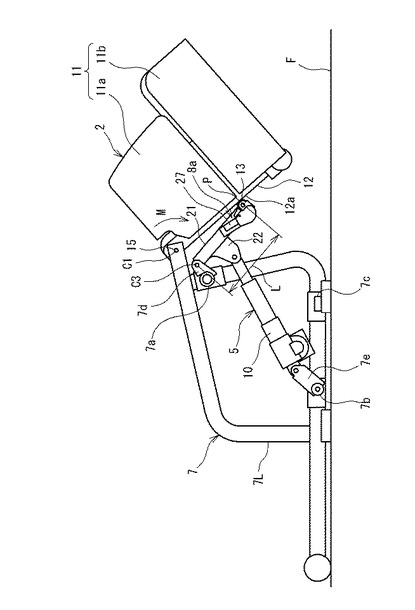
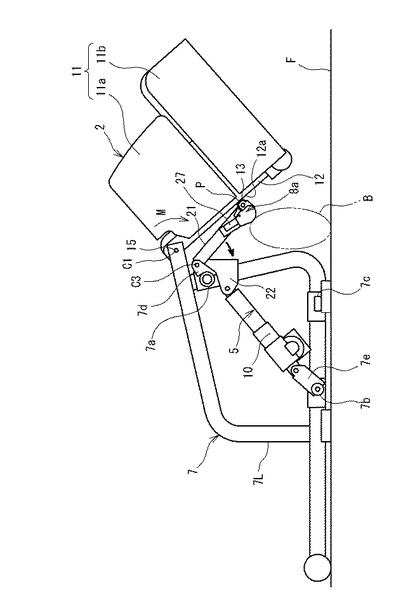
図3から図5は脚載せ部2、本体フレーム7および脚駆動部5の側面図である。なお、図3から図5では、説明を容易とするために右側フレーム7R(図2参照)が省略されている。前記のとおり、脚載せ部2は軸心C1回りに回動自在として本体フレーム7の前部に取り付けられていて、脚駆動部5は伸縮する伸縮アクチュエータ10を有している。この伸縮アクチュエータ10が伸縮動作することによって、脚載せ部2が本体フレーム7の直前に位置して脚載せ部2の脚先部側が下となる格納位置(図3)と、脚載せ部2が本体フレーム7の前端部から前方へ突出して脚先部側が前方となる最上昇位置(図4)との間を移動することができる。また、伸縮アクチュエータ10は、脚載せ部2を格納位置(図3)と最上昇位置(図4)との間の任意の位置(途中位置)で停止させ、その状態を保持することができる(図5)。
【0016】
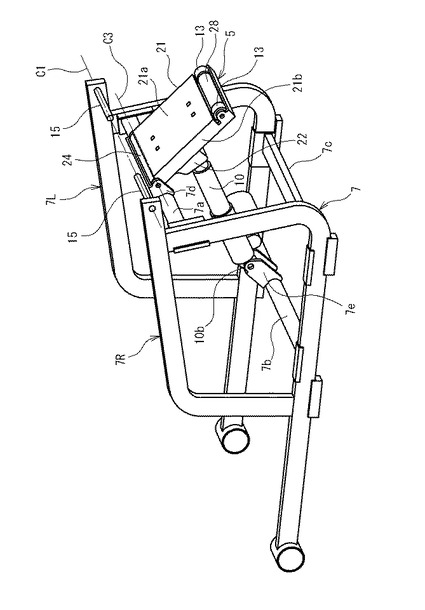
図2において、本体フレーム7は、左側フレーム7Lと、右側フレーム7Rと、左右のフレーム7L,7Rを連結している連結部材7a,7b,7cとを有している。左右のフレーム7L,7Rの上部かつ前部に、左右方向の内側へ延びた軸部材15が取り付けられている。この軸部材15の中心線が前記軸心C1となる。第一の連結部材7aと第二の連結部材7bとのそれぞれには、脚駆動部5用の取り付けブラケット7dと取り付けブラケット7eとが取り付けられている。第一の取り付けブラケット7dは、前記軸部材15が取り付けられている本体フレーム7の上部前端よりも下方でかつ後方に位置していることから、上から見ると、本体フレーム7の上部に設けられている座部1によって、取り付けブラケット7dは隠れるようにして存在することとなる。
【0017】
図4において、脚載せ部2は、使用者が脚を載せる脚本体部11と、この脚本体部11を支持している脚フレーム12とを有している。脚フレーム12は、本体フレーム7の前部に設けられた前記軸部材15に取り付けられていて、左右方向の軸心C1回りに回動自在となっている。脚本体部11には左右に凹部11L,11R(図1参照)が設けられていて、これら凹部11L,11Rに使用者は左右の脚をそれぞれ入れることができる。前記マッサージ具6としてのエアセルは、この脚本体部11に設けられている。
【0018】
脚載せ部2の脚フレーム12は、金属製のフレーム部材が組み合わされてほぼ平盤形状となり、中央に背面板12aを有していて、脚フレーム12は、脚本体部11を背面側から支えるようにして取り付けている。実施形態の脚本体部11は、脚の長さ方向に二分割されていて、使用者の脹脛を載せるレッグレスト11aと、足首および足裏を載せるフットレスト11bとを有している。レッグレスト11aおよびフットレスト11bがそれぞれ脚の長さ方向に移動可能となるように、脚フレーム12はレッグレスト11aおよびフットレスト11bを取り付けている。つまり、レッグレスト11aおよびフットレスト11bは脚の長さ方向に位置調整可能であり、脚載せ部2は、使用者の脚の長さに応じて伸縮することができる。
【0019】
脚駆動部5は、脚フレーム12を前記軸心C1回りに上下回動させる機能を有している。脚フレーム12が上下回動することで脚本体部11が軸心C1回りに上下回動する。図2において、脚駆動部5は、前記伸縮アクチュエータ10の他に、前記連結部材7aの取り付けブラケット7dに左右方向の軸心C3回りに回動自在として取り付けられた第一アーム21と、同じ軸心C3回りに回動自在として取り付けられた第二アーム22とを有している。第一アーム21と第二アーム22とは、別個独立して、同じ軸心C3回りに回動自在となっていて、第一アーム21は自由に回動することができる構成である。
【0020】
第一アーム21は、取り付けブラケット7dから直線的に延びている部材であり、図4と図5とに示しているように、上に回動した状態(最上昇位置または途中位置)にある脚フレーム12を背面側から支持することができる。第一アーム21の先端部には当接部材としてローラ13が設けられていて、このローラ13が脚フレーム12の背面板12aに接触することで、脚フレーム12は背面側から第一アーム21によって支持されている。つまり、側面視において、脚フレーム12は、本体フレーム7の前記軸部材15と、第一アーム21のローラ13とによって前後で二点支持された状態にある。
【0021】
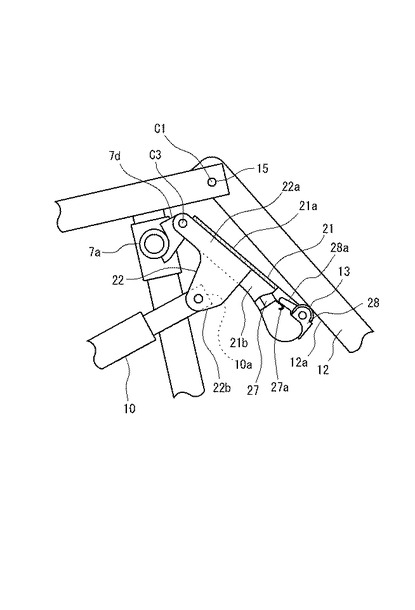
図7と図8とは第一アーム21、第二アーム22およびその周辺部の説明図である。第一アーム21は、前方または上方に面する当接板21aと、この当接板21aの左右両側から本体フレーム7側へ折れ曲がっている補強板21bとを有している。なお、図7と図8とでは、第一アーム21は、一方側の補強板21bのほぼ全体が省略された断面として示されている。
【0022】
第二アーム22は、取り付けブラケット7dから直線的に延びている直線部22aと、この直線部22aと一体である取り付け部22bとを有している。取り付け部22bは直線部22aよりも伸縮アクチュエータ10側に存在していて、伸縮アクチュエータ10の先端部10aが回動自在として取り付けられている。直線部22aは、第一アーム21の左右の補強板21bの間に存在している状態で第一アーム21の当接板21aに当接可能である。この構成によれば、第二アーム22は、図7に示しているように、上に回動した状態にある第一アーム21を上に載せた状態でその背面側から支持することができ、かつ、図8に示しているように、第二アーム22は、第一アーム21に対して回動方向の下方へ分離可能となっている。
【0023】
そして、第一アーム21の先端が第二アーム22(直線部22a)の先端よりも脚載せ部2の脚先側に位置するように、第一アーム21は第二アーム22よりも長く設定されている。つまり、第一アーム21は第二アーム22(直線部22a)よりも、本体フレーム7の前部(軸心C3)からの長さが長い。第一アーム21の基部と第二アーム22の基部とは共に、同じ取り付けブラケット7dに取り付けられているが、第二アーム22(直線部22a)の先端部は、第一アーム21の長手方向のほぼ中心位置にしか達していない。つまり、第二アーム22(直線部22a)の軸心C3からの長さは、第一アーム21の軸心C3からの長さのほぼ半分と同じである。したがって、第一アーム21の回動半径は、第二アームの回動半径よりも大きく、ほぼ二倍となっている。
【0024】
伸縮アクチュエータ10は、図示しないが、モータと、このモータの回転によって回転するナット部材と、ナット部材に螺合するねじ棒とを有していて、モータの回転によってねじ棒が進退することで、伸縮アクチュエータ10が全体として伸縮することができる。図2において、伸縮アクチュエータ10は、その基端部10bが前記第二の取り付けブラケット7eに回動自在として取り付けられている。したがって、伸縮アクチュエータ10が伸張することで、第二アーム22を強制的に押し上げて軸心C3回りに回動させることができる。そして、伸縮アクチュエータ10が短縮することで、第二アーム22を強制的に引き下げて軸心C3回りに回動させることができる。
【0025】
伸縮アクチュエータ10が伸張することにより、第二アーム22が押し上げられて上に回動すると、この第二アーム22は第一アーム21を上に回動させるように押し上げることができる。第一アーム21が上に回動すると、この第一アーム21は脚載せ部2の脚フレーム12を上に回動させるように背面側から押し上げる。この際、第一アーム21のローラ13は脚フレーム12の背面板12aを転動する。そして、脚載せ部2は最上昇位置へ達することができる(図4)。一方、前記伸縮アクチュエータ10が短縮すると、第二アーム22が下に回動するが、この第二アーム22の上に載った状態にある第一アーム21は、その自重および脚載せ部2の自重によって、脚載せ部2と共に下へ回動する。この際、第一アーム21のローラ13は、脚フレーム12の背面板12aを転動する。そして、脚載せ部2は最下位置である格納位置へ達することができる(図3)。
【0026】
また、図5に示しているように、伸縮アクチュエータ10が伸張している途中または短縮している途中で停止すると、伸縮アクチュエータ10は第二アーム22をその位置に停止させ、第二アーム22は本体フレーム7から下傾した状態となる。第一アーム21はこの第二アーム22上に載った状態で維持され、この第一アーム21のローラ13上に脚フレーム12が載った状態に維持される。なお、最上昇位置(図4)または途中位置(図5)では、第一アーム21は第二アーム22に上から載った状態であるため、第一アーム21と第二アーム22とは、回動方向上下に離れることが可能である(図8参照)。
【0027】
以上の構成を有する椅子型マッサージ機によれば、図5において、脚駆動部5により脚載せ部2の脚フレーム12を上下回動させる際、脚フレーム12には軸心C1を中心とするモーメントMが作用する。この脚フレーム12を背面側から支持している第一アーム21は、第二アーム22よりも軸心C3からの長さが長いことから、第一アーム21のローラ13は、脚フレーム12の背面板12aの内の脚先側の部分と接触した状態で、当該脚フレーム12を背面側から支持することができる。これにより、軸心C3から、第一アーム21が脚フレーム12を支持する支持点PまでのモーメントアームLが大きくなり、脚フレーム12を支持するために必要な支持点Pでの支持力を小さくすることができ、この反力として脚フレーム12の背面板12aに作用する荷重も小さくなる。このため、脚フレーム12をとりわけ強固に形成する必要がなくなり、背面板12aを薄くすることもできる。すなわち、本体フレーム7の軸部材15と第一アーム21のローラ13とによって脚の長さ方向の基部と先部側とのできるだけ離れた二点で、脚フレーム12を支持することができ、本体フレーム7に生じる曲げモーメントを小さくすることができ、構造的に有利である。なお、仮に第一アーム21の長さが短く前記モーメントアームLが短い場合、ローラ13における支持点Pで大きな曲げモーメントが本体フレーム7に作用することとなり、構造的に不利である。このようにアーム(第一アーム21)によって脚載せ部2を背面側から支持して上下回動させる場合、当該アームを、長く設定するのが好ましい。
【0028】
しかし、第一アーム21が長くなると、脚載せ部2を下に回動させている途中で床面Fとの間に存在する障害物Bに接触しやすくなる(図6参照)。なお、障害物Bとしては、例えば脚載せ部2を最上昇位置として椅子型マッサージ機を使用している途中、過ってボール等が飛んできてその脚載せ部2の下に潜り込んだ場合に、そのボールである。従来のように(図示しないが)伸縮アクチュエータと第一アームとが軸によって連結されていて伸縮アクチュエータが第一アームを直接引き下げる場合、この第一アームと床面との間でボールが挟まれると、伸縮アクチュエータは無理に第一アームを引き下げようとするため、第一アーム、伸縮アクチュエータおよびその連結部に過大な力が作用し、これらに不具合が生じてしまうおそれがある。
【0029】
そこで本発明の前記構成によれば、第一アーム21および第二アーム22は共に、本体フレーム7の前部に左右方向の軸心C3回りに回動自在として取り付けられていて、第二アーム22は第一アーム21を上に載せた状態にある。このため、第二アーム22は第一アーム21から回動方向の下方へ分離可能であり、第一アーム21を下に回動させている途中で当該第一アーム21が床面F上の障害物Bであるボールに接触しても、図6に示しているように、第一アーム21を残して、伸縮アクチュエータ10は第二アーム22のみを引き下げるように、終端まで短縮し続けることができる。このため、伸縮アクチュエータ10は、第一アーム21および脚フレーム12を無理に下へ回動させず、伸縮アクチュエータ10、第一アーム21および脚フレーム12に無理な力が作用しないため、これらに不具合が生じることを防止することができる。
【0030】
そして、第二アーム22は第一アーム21よりも短いので(回動半径が小さいので)、図4に示しているように、上に回動した第二アーム22は第一アーム21と比べて床面Fとの間に障害物Bが存在しにくい構成となっている。特に、第二アーム22の基部を取り付けている取り付けブラケット7dは、前記のとおり、本体フレーム7の上部前端よりも下方でかつ後方に位置していることから、上から見ると、座部1に隠れるようにして存在していて、さらに、この取り付けブラケット7dの下方(第二アーム22の回動軌跡の下下方)には、本体フレーム7の前端下部にある前方へ膨らんだフレーム部分7f、および、本体フレーム7の前端に設けられるカバー部材(図示せず)が存在しているので、第二アーム22と床面Fとの間に、障害物Bが入り込むスペースは存在せず、または、存在していてもごく僅かである。
【0031】
以上の構成を有する前記椅子型マッサージ機が備えている別の機能について説明する。図4において、脚載せ部2は使用者の脚を支持するものであるため、使用者の全体重の内の主として脚部分の体重が作用するはずであるが、例えば、脚載せ部2が上に回動した状態で、子供が脚載せ部2のみに乗ると(体重をかけると)、その荷重が異常荷重F0として脚載せ部2に作用してしまう。この場合、脚載せ部2がそのままの姿勢を維持していると、脚載せ部2、伸縮アクチュエータ10およびその連結部に過大な力が作用し、不具合が生じるおそれがある。そこで、この椅子型マッサージ機は、最上昇位置または途中位置のように上に回動した状態にある脚載せ部2に対して上から異常荷重F0が作用すると、当該脚載せ部2を下へ回動させる退避手段を備えている。
【0032】
退避手段の第一の形態を図9において説明する。図9は第一アーム21の先部および脚載せ部2の脚フレーム12(背面板12a)を示している。退避手段8aは、脚載せ部2に作用する異常荷重を検出するためのセンサ27と、このセンサ27の検出信号に基づいて前記伸縮アクチュエータ10によって脚載せ部2を下へ回動させる制御をする制御部9とを有している。脚載せ部2の脚本体部11に前記異常荷重F0(図4参照)が作用すると、その荷重F0は脚フレーム12を介して、本体フレーム7の軸部材15および第一アーム21のローラ13に作用する。図9では、ローラ13に作用する荷重成分をF1として示している。
【0033】
第一アーム21の先端部のローラ13は、取り付け部材28に回転自在に取り付けられていて、この取り付け部材28は、第一アーム21の先端部に設けられた第一の軸41によって回動可能として取り付けられている。つまり、取り付け部材28は、第一の軸41の左右水平方向に延びる軸心回りに回動可能である。また、取り付け部材28は、第一アーム21の基部側へ延びているレバー部28aを有している。そして、第一アーム21の側面に前記センサ27が取り付けられていて、このセンサ27は第一アーム21の先端部側へ延びているセンサアーム27aを有している。
取り付け部材28の一部28bには、第二の軸43が取り付けられていて、第一アーム21には第三の軸44が取り付けられている。そして、第二の軸43と第三の軸44との間に、引っ張りバネ46が取り付けられていて、このバネ46は、レバー部28aをセンサアーム27aから離そうとする方向(図9の矢印Qと反対の方向)に、取り付け部材28を付勢している。
【0034】
図4および図9において、上に回動した状態にある脚フレーム12に上から異常荷重F0による荷重F1が作用すると、脚フレーム12は軸心C1回りに回動自在であることから、脚フレーム12はローラ13および取り付け部材28を押し下げ、脚フレーム12は第一アーム21に対して回動方向の下へ位置変化することができる。つまり、脚フレーム12は第一アーム21に接近する。脚フレーム12がローラ13および取り付け部材28を押し下げることによって、ローラ13および取り付け部材28は、前記引っ張りバネ46に抗して、第一の軸41の軸心回り(図9の矢印Qの方向)に回動することができる。
【0035】
以上の構成によれば、脚載せ部2に異常荷重F0が作用すると、脚フレーム12はローラ13および取り付け部材28を押し下げて第一アーム21に対して下へ位置変化する。つまり、異常荷重F0によって脚フレーム12からローラ13に荷重F1が作用すると、当該脚フレーム12に押されたローラ13は、バネ46(図12ではバネ26)に抗して取り付け部材28と共に、図9の矢印Qの方向に変位し、レバー部材28aがセンサアーム27aを押し下げる。センサアーム27aが押し下げられると、センサ27はこれを検出する。つまり、センサ27によって脚フレーム12の位置変化を検出することができる。そして、制御部9はセンサ27からの検出信号を受信すると、この検出信号に基づいて、制御部9は伸縮アクチュエータ10を短縮させ脚フレーム12を下へ回動させる制御を開始する。なお、制御部9はマイコンからなり、伸縮アクチュエータ10の動作を制御する機能を有している。
【0036】
また、図12は図9の変形例を示している。この図12の形態では図9の形態と比べて、取り付け部材28および前記バネ46が異なる。図12の場合、取り付け部材28は、第一アーム21の先端部に脚フレーム12の回動方向の下方(図12では下)へ変位可能として取り付けられている。さらに、取り付け部材28(ローラ13)は回動方向の上方(図12では上)へ、バネ26によって弾性的に付勢されている。したがって、図4および図12において、上に回動した状態にある脚フレーム12に上から異常荷重F0による荷重F1が作用すると、脚フレーム12がローラ13および取り付け部材28を押し下げ、ローラ13および取り付け部材28が沈み込んで、脚フレーム12は第一アーム21に対して回動方向の下へ位置変化することができる。これにより、レバー部材28aがセンサアーム27aを押し下げ、センサ27はこの押し下げを検出する。そして、制御部9はセンサ27からの検出信号を受信すると、この検出信号に基づいて、制御部9は伸縮アクチュエータ10を短縮させ脚フレーム12を下へ回動させる制御を開始する。
【0037】
図9および図12のそれぞれの形態において、異常荷重F0によってローラ13に作用する荷重F1が、予め設定されている所定の値に達すると、センサ27が検出信号を出力するように、バネ46(バネ26)の強さ(バネ係数)は設定されている。すなわち、脚載せ部2に使用者の脚の荷重(体重)が作用しているのみでは、バネ46の変形は小さく、センサ27は検出信号を出力しないが、ローラ13に子供の体重程度の荷重が作用すると、バネ46は大きく変形し、センサ27は検出信号を制御部9へ出力するように、バネ46の強さは設定されている。バネ46の強さの設定の具体例は、脚載せ部2が最上昇位置にある状態で、ローラ13の直上の部位に対して下向きに150N〜250N(15kgf〜25kgf)の荷重が作用すると、センサ27は検出信号を出力するように設定されている。特に、本発明では、脚載せ部2を背面側から支持する第一アーム21が長く設定されているため、脚フレーム12を支持するローラ13における接触力を小さくすることができる。このため、子供の体重程度の荷重が脚載せ部2に作用するとセンサ27を機能させるにしても、バネ46の強さを小さく設定することができ(弱いバネとすることができ)、センサ27による検出感度を高めることができる。
【0038】
この退避手段8aによれば、上に回動した状態にある脚載せ部2に対して上から異常荷重F0が作用すると、脚フレーム12は第一アーム21に対して回動方向の下へ位置変化する。センサ27がこの位置変化を検出すると、制御部9は、伸縮アクチュエータ10を短縮させ脚フレーム12を下へ回動させることができる。このため、異常荷重F0が作用した脚載せ部2を下方へ回動させることで、当該異常荷重F0を脚載せ部2からいなすことができ、脚駆動部5や脚載せ部2が損傷することを防止することができる。
【0039】
また、伸縮アクチュエータ10と制御部9との内の少なくとも一方による機能によって、伸縮アクチュエータ10の短縮速度を変更可能とするように構成されているのがよい。すなわち、本発明の椅子型マッサージ機において、マッサージを行うための通常時に脚載せ部2を上下回動させる場合、第一の速度(低速)で伸縮アクチュエータ10は伸縮するが、制御部9がセンサ27から検出信号を受信すると、伸縮アクチュエータ10を第一の速度よりも早い第二の速度(高速)で短縮させるように構成されているのが好ましい。これにより、脚載せ部2に異常荷重F0が作用すると、脚載せ部2を迅速に下方回動させてその荷重をいなすことができ、脚載せ部2および脚駆動部5の破損を防止することができる。
【0040】
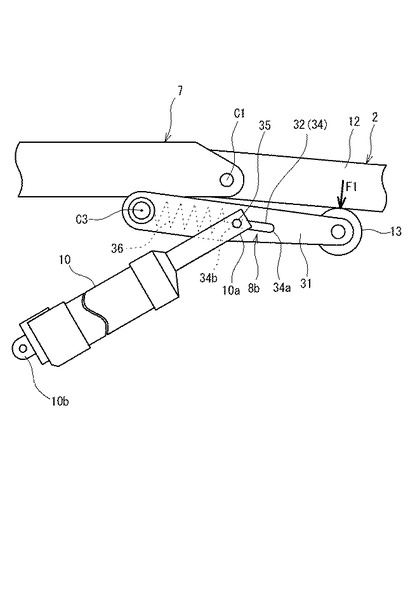
図10と図11は、退避手段の他の実施形態の説明図である。この退避手段を備えている椅子型マッサージ機は、図1と図2に示した椅子型マッサージ機と比べて、脚駆動部5のアームの構成および退避手段が異なる他は、ほぼ同じである。図10の脚駆動部5では、脚フレーム12と伸縮アクチュエータ10との間に存在して脚フレーム12を背面側から支持する部材は、一本のアーム31からなる。そして、脚駆動部5は、前記実施形態と同様に(図2を参考)、基部が本体フレーム7の第二ブラケット7eに回動自在に取り付けられ、かつ、伸張することで、先部によって脚載せ部2を押し上げて回動させる伸縮アクチュエータ10を有している。
【0041】
図10の退避手段8bは、脚載せ部2に前記のような異常荷重が作用すると、その状態での伸縮アクチュエータ10の全長を変えないで、当該伸縮アクチュエータ10の先端部10a(先部)を脚載せ部2の脚先側(図10では右側)へ移動させるガイド部32を有している。退避手段8bの具体的な構成を説明すると、ガイド部32は、アーム31の側面に設けられた長孔34からなり、長孔34はアーム31の長手方向に沿って形成されている。伸縮アクチュエータ10の先端部10aと、アーム31とは、左右方向の軸心を有するピン部材35によって回動自在に連結されていて、さらに、このピン部材35は長孔34内を移動することができる。
【0042】
ピン部材35とアーム31の基部との間には、ピン部材35をアーム31の基部(軸心C3)側へ付勢する弾性部材(以下、バネとして説明する)36が取り付けられている。バネ36は所定の強さ(バネ係数)に設定されており、前記異常荷重(異常荷重によってアーム31の先端にあるローラ13に所定の荷重F1)が作用すると、ピン部材35を長孔34の先端部34aへ移動させることができるが、この異常荷重(荷重F1)が作用していない通常時では、ピン部材35を長孔34の基端部34bに位置させることができる強さに、バネ36は設定されている。
【0043】
この椅子型マッサージ機によってマッサージを行うために、伸縮アクチュエータ10が伸張して脚載せ部2を上下回動させる場合、バネ36はピン部材35を軸心C3側へ付勢していることから、ピン部材35は長孔34の先端部34a側へ移動しないで基端部34b側に位置し、当該ピン部材35は長孔34の上面を上に押圧し、アーム31を上に回動させることができる。これにより、脚載せ部2を上に回動させることができる。また、脚載せ部2を下に回動させる場合、伸縮アクチュエータ10を短縮させると、ピン部材35は長孔34の基端部34b側に位置し、当該ピン部材35によってアーム31を回動方向の下方へ引き込み、アーム31を下に回動させることができる。これにより、脚載せ部2を下に回動させることができる。
【0044】
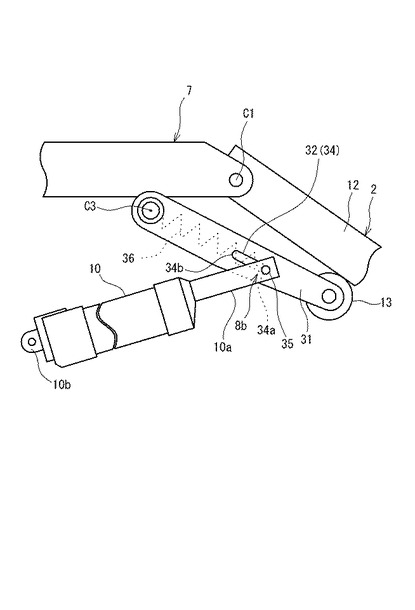
しかし、図10に示しているように、脚載せ部2に前記異常荷重が作用した場合に、この異常荷重によって脚フレーム12はアーム31の先端のローラ13を荷重F1で押すこととなり、アーム31は軸心C3回りに下へ回動しようとする力が作用する。この際、伸縮アクチュエータ10の先端部10aのピン部材35は、前記バネ36に抗して、長孔34に沿ってアーム31の長さ方向の前方側に移動(退避)することができるので、図11に示しているように、このピン部材35の移動に伴い、アーム31が軸心C3を中心として下に回動すると共に、その状態にあった伸縮アクチュエータ10は長さを変えないで基端部10bを回動中心として下に回動することができる。これにより、脚載せ部2も軸心C1を中心として下に回動することができ、前記異常荷重を脚載せ部2から瞬間的にいなすことができ、脚載せ部2および脚駆動部5の破損を防止することができる。
【0045】
なお、図10と図11では、一本のアーム31を有している場合を説明したが、図2の実施形態のように二本のアーム(第一アーム21と第二アーム22)を備えている椅子型マッサージ機に、図9の退避手段8aの代わりに図10の退避手段8bを適用してもよい。この場合、第二アーム22に前記長孔34およびバネ36を設ければよい。
【0046】
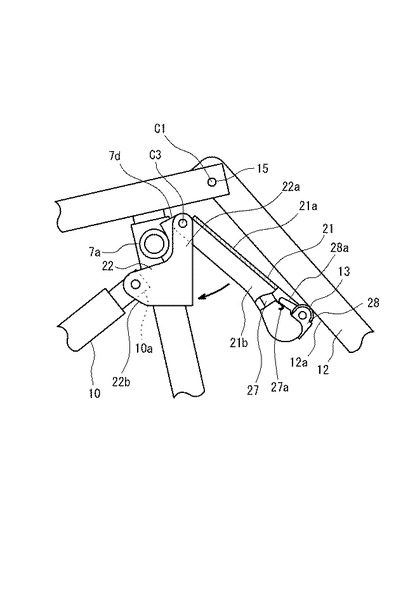
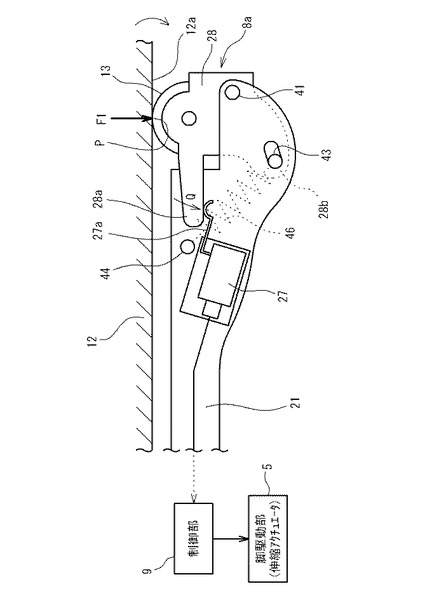
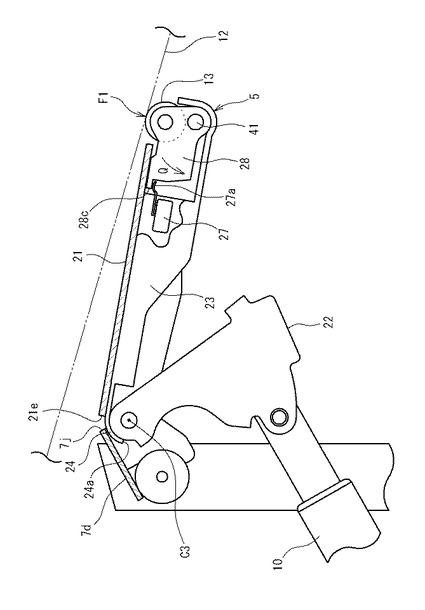
図13は、他の実施形態の椅子型マッサージ機が備えている本体フレーム7および脚駆動部5の斜視図である。図14は、脚駆動部5の要部の断面図である。なお、図14では、第一アーム21と第二アーム22とが離れた状態として記載されている。
図13において、本体フレーム7の構成は、図2の実施形態のものと同様である。また、脚駆動部5は、図2の実施形態と同様に、脚載せ部2(図1参照)を軸心C1回りに上下回動させる機能を備えている。つまり、脚駆動部5は、伸縮アクチュエータ10と、本体フレーム7が有する取り付けブラケット7dに左右方向の軸心C3回りに回動自在として取り付けられた第一アーム21と、同じ軸心C3回りに回動自在として取り付けられた第二アーム22とを有している。第一アーム21と第二アーム22とは、別個独立して、同じ軸心C3回りに回動自在となっていて、第一アーム21は自由に回動することができる。
【0047】
図2の実施形態と異なる点は、図13の第一アーム21は(回動方向の)厚さよりも左右方向の幅が大きく構成されていて、これに対応して第二アーム22も幅広に構成されている点である。第一アーム21と第二アーム22とを幅広とすることで、強度を高めることができ、また、幅広とすることで、第一アーム21の先部の左右両端にローラ13をそれぞれ設けることができ、左右一対のローラ13によって脚載せ部2(図1参照)を左右方向に安定して支持することができる。
【0048】
さらに、第一アーム21が有している前方または上方に面する当接板21a及びこの当接板21aの左右両側から本体フレーム7側へ折れ曲がっている補強板21bによって、第一アーム21は、伸縮アクチュエータ10側に開口しているボックス構造が得られる。そこで、前記実施形態(図9)と同様のセンサ27が、図14に示しているように、ボックス型である第一アーム21内に格納されている。このように、図14の実施形態では、第一アーム21がセンサ27を覆って保護することができる。
【0049】
図14において、第一アーム21の先端部のローラ13は、取り付け部材28に回転自在に取り付けられていて、この取り付け部材28は、第一アーム21の先端部に設けられた軸41によって回動可能として取り付けられている。取り付け部材28は左右方向に長く形成されていて(図13参照)、この取り付け部材28の左右両側にローラ13が位置している。
取り付け部材28は、第一アーム21の基部側の位置に当接部28cを有している。そして、第一アーム21の内部にある内部部材23に前記センサ27が取り付けられていて、このセンサ27は第一アーム21の先端部側へ延びているセンサアーム27aを有している。前記軸41には、コイルバネ(図示せず)が取り付けられていて、このコイルバネは、当接部28cをセンサアーム27aから離そうとする方向に、取り付け部材28を付勢している。
【0050】
そして、上に回動した状態にある脚フレーム12に上から異常荷重が作用し、この異常荷重によって荷重F1が作用すると、脚フレーム12は軸心C1(図13参照)回りに回動自在であることから、脚フレーム12はローラ13および取り付け部材28を押し下げる。これにより、ローラ13および取り付け部材28は、前記コイルバネに抗して、軸41の軸心回り(図14の矢印Qの方向)に回動する。これにより、当接部28cがセンサアーム27aを押し下げ、センサ27はこれを検出する。そして、制御部9がセンサ27からの検出信号を受信し、この検出信号に基づいて、制御部9は伸縮アクチュエータ10を短縮させ脚フレーム12を下へ回動させる制御を開始する。以上のように、図13の椅子型マッサージ機も、上に回動した状態にある脚載せ部2に対して上から異常荷重が作用すると、当該脚載せ部2を下へ回動させる退避手段を備えている。
【0051】
図14の第一アーム21は、固定側である取り付けブラケット7dに対して回動するが、第一アーム21の基端21eと、取り付けブラケット7dの先端7jとの間で、使用者の身体の一部(例えば手指)が挟まれるのを防止する挟み防止部を、このマッサージ機は有している。挟み防止部は、第一アーム21内の内部部材23から延長している部分であって、軸心C3を中心として円弧形状に形成された円弧壁部24からなる。円弧壁部24は、図13に示しているように、第一アーム21の左右方向のほぼ全長にわたって形成されている。そして、第一アーム21が軸心C3回りに回動しても、全回動ストロークにおいて、円弧壁部24の外周面が、取り付けブラケット7dの前記先端7jに近接した状態であり、かつ、円弧壁部24の少なくとも先端部24aが、取り付けブラケット7d内に収納された状態となっていることにより、手指等の挟まれを防止することができる。
【0052】
以上のように、本発明の前記各実施形態によれば、脚載せ部2が下へ回動する際に、図6に示しているように、床面Fとの間に存在している障害物Bに接触しても、脚載せ部2および脚駆動部5等に無理な力が作用しないため、脚載せ部2を上下回動させるための機器の不具合の発生を防止することができる。また、脚載せ部2に上から異常荷重が作用しても、その異常荷重を脚載せ部2でいなすことができ、脚載せ部2を上下回動させるための機器の不具合の発生を防止することができる。
【0053】
また、前記実施形態では、脚駆動部5の伸縮アクチュエータ10を、ナット部材とねじ棒とを有する構成として説明したが、脚載せ部2を上下回動させるアクチュエータは、これ以外であってもよく、エアの供給または排出によって膨張または収縮するエアセルであってもよい。つまり、本体フレーム7の前部と、脚載せ部2の脚フレーム12との間にエアセルを介在させ、本体フレーム7内に設けられたエア供給ユニットによってエアセルにエアを供給して、当該エアセルを膨張させることにより、脚載せ部2を押し上げて回動させることができる。そして、エアセルのエアを排気させると、脚載せ部2は下に回動する。この脚駆動部5によれば、脚載せ部2に前記異常荷重が作用した場合、脚載せ部2または本体フレーム7に取り付けたセンサによって前記異常荷重の発生を検出し、この検出信号に基づいて制御部9によってエア供給ユニットを排気状態とすることでエアセルのエアを排気可能な状態とすれば、脚載せ部2の荷重によってエアセルは迅速に収縮することができ、脚載せ部2を、通常時に回動させる場合よりも迅速に、下方へ回動させることができる。したがって、脚載せ部2に異常荷重が作用しても、この異常荷重を脚載せ部2からいなすことができる。
【0054】
また、本発明の椅子型マッサージ機は、図示する形態に限らず本発明の範囲内において他の形態のものであってもよい。前記実施形態(図1)では、脚載せ部2の脚本体部11に、マッサージ具としてのエアセルを設けた場合を説明したが、座部1と脚本体部11との内の少なくとも一方にマッサージ具が設けられていればよい。そして、マッサージ具は、エアセル以外に、図示しないが、施療子を端部に取り付けたアームと、このアームを駆動する駆動部とを有するものであってもよい。また、背凭れ部3にマッサージ具が設けられていてもよい。
【図面の簡単な説明】
【0055】
【図1】本発明の椅子型マッサージ機の実施の一形態を示す斜視図である。
【図2】本体フレームおよび脚駆動部の斜視図である。
【図3】脚載せ部、本体フレームおよび脚駆動部の側面図であり、脚載せ部が格納位置にある状態を示している。
【図4】脚載せ部、本体フレームおよび脚駆動部の側面図であり、脚載せ部が最上昇位置にある状態を示している。
【図5】脚載せ部、本体フレームおよび脚駆動部の側面図であり、脚載せ部が途中位置にある状態を示している。
【図6】脚載せ部、本体フレームおよび脚駆動部の側面図であり、第一アームが障害物に当接した状態を示している。
【図7】第一アーム、第二アームおよびその周辺部の説明図である。
【図8】第一アーム、第二アームおよびその周辺部の説明図である。
【図9】退避手段の第一の形態を説明する説明図である。
【図10】退避手段の他の形態の説明図である。
【図11】退避手段の他の形態の説明図である。
【図12】図9の退避手段の変形例を示している説明図である。
【図13】他の実施形態の椅子型マッサージ機が備えている本体フレームおよび脚駆動部の斜視図である。
【図14】脚駆動部の要部の断面図である。
【符号の説明】
【0056】
1 座部
2 脚載せ部
5 脚駆動部
6 マッサージ具
7 本体フレーム
8a,8b 退避手段
9 制御部
10 伸縮アクチュエータ
11 脚本体部
12 脚フレーム
13 ローラ
21 第一アーム
22 第二アーム
27 センサ
31 アーム
32 ガイド部
C1 脚載せ部の回動軸心
C3 第一、第二アームの回動軸心
F 床面
【技術分野】
【0001】
本発明は、上下回動する脚載せ部を備えた椅子型マッサージ機に関する。
【背景技術】
【0002】
使用者が脚を載せる脚載せ部を備え、この脚載せ部が上下回動する椅子型マッサージ機が知られている。このような椅子型マッサージ機は、床面に置かれる本体フレームと、この本体フレームに設けられ使用者が着座する座部と、前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚載せ部と、この脚載せ部を前記軸心回りに上下回動させる脚駆動部と、前記脚載せ部に設けられたマッサージ具とを備えている(例えば、特許文献1参照)。
【0003】
前記脚駆動部は、モータの回転によって伸縮する伸縮アクチュエータであり、この伸縮アクチュエータの基部が前記本体フレームに軸によって回動自在に取り付けられ、先部が前記脚載せ部の脚フレームに軸によって回動自在に取り付けられている。この構成によれば、伸縮アクチュエータが伸張すると脚載せ部を上に押し上げて回動させることができ、伸縮アクチュエータが短縮すると脚載せ部を引き下げて回動させることができる。
このように、脚駆動部によって脚載せ部を上に回動させた状態とすることで、使用者の脚をリラックスさせたり、この脚載せ部に保持された使用者の脚に対して前記マッサージ具によりマッサージを行ったりすることができる。そして、椅子型マッサージ機の不使用時には、脚載せ部を下へ回動させて降ろし、脚載せ部が邪魔にならないようにすることができる。
【0004】
【特許文献1】特開2006−288488号公報(図3参照)
【発明の開示】
【発明が解決しようとする課題】
【0005】
前記伸縮アクチュエータの基部は軸によって本体フレームに連結されていて、先部は軸によって脚載せ部の脚フレームに連結されている。このため、脚載せ部を上に回動させた状態で、使用者の脚以外の重たいものがこの脚載せ部に載ると、脚載せ部、伸縮アクチュエータおよびその連結部に過大な力が作用し、これらに不具合が生じてしまうおそれがある。
また、上に回動した状態にあった脚載せ部を下へ回動させる途中で、床面と脚載せ部との間に障害物が存在していると、脚載せ部がこの障害物に当接し、伸縮アクチュエータは無理に脚載せ部を引き下げようとする。このため、脚載せ部、伸縮アクチュエータおよびその連結部に過大な力が作用し、これらに不具合が生じてしまうおそれがある。
【0006】
前記のように、脚載せ部を上下回動させる構成を採用することによって、使用者をリラックスさせたりすることができるが、このような構成を採用することで、前記のように非常時に機器に不具合を生じさせてしまうおそれがある。
そこで本発明は、脚載せ部を上下回動させるための機器および脚載せ部の不具合の発生を防止することができる椅子型マッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の椅子型マッサージ機は、床面に置かれる本体フレームと、この本体フレームに設けられ使用者が着座する座部と、前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚載せ部と、前記脚載せ部を前記軸心回りに上下回動させる脚駆動部と、前記座部と前記脚載せ部との内の少なくとも一方に設けられたマッサージ具とを備えた椅子型マッサージ機であって、上に回動した状態にある前記脚載せ部に対して上から異常荷重が作用すると、当該脚載せ部を下へ回動させる退避手段を備えている(発明1)。
本発明によれば、上に回動した状態にある脚載せ部に対して上から異常荷重が作用すると、退避手段は、その脚載せ部を下方へ回動させるので、前記異常荷重を脚載せ部からいなすことができ、脚駆動部や脚載せ部が損傷することを防止することができる。
【0008】
そして、前記退避手段が、前記異常荷重を検出するためのセンサと、このセンサの検出信号に基づいて前記脚駆動部によって前記脚載せ部を下へ回動させる制御をする制御部とを有している構成とした場合、前記センサによって前記異常荷重が検出されると、制御部は脚駆動部によって脚載せ部を下方へ回動させ、前記異常荷重を脚載せ部からいなすことができる。
または、前記椅子型マッサージ機の前記脚駆動部は、基部が前記本体フレームに回動自在に取り付けられかつ伸張することで前記脚載せ部を押し上げて回動させる伸縮アクチュエータを有していて、前記退避手段が、前記異常荷重が作用すると、前記伸縮アクチュエータの全長を変えないで、当該伸縮アクチュエータの先部を前記脚載せ部の脚先側へ移動させることにより前記脚載せ部を下へ回動させるガイド部を有している構成とした場合、脚載せ部に前記異常荷重が作用すると、ガイド部によって、伸縮アクチュエータの全長を変えないで、伸縮アクチュエータの先部を脚載せ部の脚先側へ移動させることにより、この伸縮アクチュエータは基部を中心として下方へ回動し、これと同時に脚載せ部を下へ回動させることができ、前記異常荷重を脚載せ部からいなすことができる。
【0009】
また、本発明は、床面に置かれる本体フレームと、この本体フレームに設けられ使用者が着座する座部と、使用者が脚を載せる脚本体部と、この脚本体部を支持しかつ前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚フレームとを有する脚載せ部と、前記脚フレームを前記軸心回りに上下回動させる脚駆動部と、前記座部と前記脚本体部との内の少なくとも一方に設けられたマッサージ具とを備えた椅子型マッサージ機であって、前記脚駆動部は、前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられ、かつ、前記脚フレームを背面側から支持する第一アームと、前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられ、前記第一アームを上に載せた状態で背面側から支持することができ、かつ、前記第一アームとは回動方向の下方へ分離可能な第二アームと、伸張することで前記第二アームを押し上げて前記軸心回りに回動させかつ短縮することで前記第二アームを引き下げて前記軸心回りに回動させる伸縮アクチュエータとを有し、前記第一アームの先端が前記第二アームの先端よりも前記脚載せ部の脚先側に位置するように、前記第一アームは前記第二アームよりも長く設定されている(発明2)。
【0010】
本発明によれば、脚駆動部によって脚フレームを上下回動させる際、脚フレームにはモーメントが作用するが、この脚フレームを背面側から支持している第一アームは、第二アームよりも長いことから、(第一アームが短い場合よりも)モーメントアームを大きくすることができる。このため、第一アームが脚フレームを支持するために必要な力を小さくすることができ、この反力として脚フレームに作用する荷重も小さくなるので、脚フレームをとりわけ強固に形成する必要がなくなり、重量の軽減につながる。
しかし、第一アームが長くなると、第一アームが下に回動している途中で床面との間に存在する障害物に接触しやすくなる。そこで本発明では、第一アームおよび第二アームは共に、本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられていて、第二アームは、第一アームを背面側から支持することができ、かつ、第一アームとは回動方向の下方へ分離可能であるため、第一アームが下に回動している途中で前記障害物に接触しても、この第一アームを残して伸縮アクチュエータは第二アームのみを引き下げるようにして短縮し続けることができる。このため、伸縮アクチュエータは、第一アームおよび脚フレームを無理に下へ回動させず、伸縮アクチュエータ、第一アームおよび脚フレームに無理な力が作用しないため、これらに不具合が生じることを防止することができる。そして、第二アームは第一アームよりも短いので、第二アームは第一アームと比べて床面との間に障害物が存在しにくい構成となっている。
【0011】
また、この椅子型マッサージ機は、上に回動した状態にある前記脚載せ部に対して上から異常荷重が作用すると、当該脚載せ部を下へ回動させる退避手段を更に備え、前記脚フレームは、前記異常荷重が作用すると、前記第一アームに対して回動方向の下へ位置変化するように設けられていて、前記退避手段は、前記位置変化を検出するセンサと、このセンサの検出信号に基づいて前記伸縮アクチュエータを短縮させ前記脚フレームを下へ回動させる制御をする制御部とを有するのが好ましい。
この構成によれば、上に回動した状態にある脚載せ部に対して上から異常荷重が作用すると、脚フレームは第一アームに対して回動方向の下へ位置変化する。センサがこの位置変化を検出すると、制御部は、伸縮アクチュエータを短縮させ脚フレームを下へ回動させるので、前記異常荷重を脚載せ部からいなすことができ、伸縮アクチュエータおよび脚フレームに不具合が生じることを防止することができる。
【発明の効果】
【0012】
前記発明1によれば、脚載せ部に上から異常荷重が作用しても、その異常荷重を脚載せ部からいなすことができ、機器の不具合の発生を防止することができる。また、前記発明2によれば、脚載せ部が下へ回動する際に、脚載せ部を背面側から支持しているアームが床面との間に存在している障害物に接触しても、無理な力が作用しないため、機器の不具合の発生を防止することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は本発明の椅子型マッサージ機の実施の一形態を示す斜視図である。この椅子型マッサージ機は、使用者が着座する座部1と、使用者が脚を載せる脚載せ部2と、使用者が凭れる背凭れ部3と、使用者が左右の腕を載せる左右の肘掛け部4とを備えている。また、この椅子型マッサージ機は、床面に置かれ椅子本体の骨格を形成している本体フレーム7を備えている。
座部1は本体フレーム7の上部に設けられている。脚載せ部2は、本体フレーム7の前部に左右方向の軸心C1回りに回動自在として取り付けられている。また、椅子型マッサージ機は、脚載せ部2を軸心C1回りに上下回動させる脚駆動部5を備えている。図2は、本体フレーム7および脚駆動部5の斜視図である。
【0014】
脚載せ部2にはマッサージ具6が設けられていて(図1参照)、このマッサージ具6は、エアの供給または排出によって膨張または収縮するエアセルである。本体フレーム7内に設けられたエア供給ユニット(図示せず)からエアが供給されることによってエアセルは膨張し、使用者の脚を押圧する。一方、エア供給ユニットが排気状態となると、エアセルは収縮する。
背凭れ部3は、左右方向の水平軸心C2回りに回動自在であり、座部1と背凭れ部3との間に設けられたアクチュエータ(図示せず)によってリクライニング動作をする。
【0015】
図3から図5は脚載せ部2、本体フレーム7および脚駆動部5の側面図である。なお、図3から図5では、説明を容易とするために右側フレーム7R(図2参照)が省略されている。前記のとおり、脚載せ部2は軸心C1回りに回動自在として本体フレーム7の前部に取り付けられていて、脚駆動部5は伸縮する伸縮アクチュエータ10を有している。この伸縮アクチュエータ10が伸縮動作することによって、脚載せ部2が本体フレーム7の直前に位置して脚載せ部2の脚先部側が下となる格納位置(図3)と、脚載せ部2が本体フレーム7の前端部から前方へ突出して脚先部側が前方となる最上昇位置(図4)との間を移動することができる。また、伸縮アクチュエータ10は、脚載せ部2を格納位置(図3)と最上昇位置(図4)との間の任意の位置(途中位置)で停止させ、その状態を保持することができる(図5)。
【0016】
図2において、本体フレーム7は、左側フレーム7Lと、右側フレーム7Rと、左右のフレーム7L,7Rを連結している連結部材7a,7b,7cとを有している。左右のフレーム7L,7Rの上部かつ前部に、左右方向の内側へ延びた軸部材15が取り付けられている。この軸部材15の中心線が前記軸心C1となる。第一の連結部材7aと第二の連結部材7bとのそれぞれには、脚駆動部5用の取り付けブラケット7dと取り付けブラケット7eとが取り付けられている。第一の取り付けブラケット7dは、前記軸部材15が取り付けられている本体フレーム7の上部前端よりも下方でかつ後方に位置していることから、上から見ると、本体フレーム7の上部に設けられている座部1によって、取り付けブラケット7dは隠れるようにして存在することとなる。
【0017】
図4において、脚載せ部2は、使用者が脚を載せる脚本体部11と、この脚本体部11を支持している脚フレーム12とを有している。脚フレーム12は、本体フレーム7の前部に設けられた前記軸部材15に取り付けられていて、左右方向の軸心C1回りに回動自在となっている。脚本体部11には左右に凹部11L,11R(図1参照)が設けられていて、これら凹部11L,11Rに使用者は左右の脚をそれぞれ入れることができる。前記マッサージ具6としてのエアセルは、この脚本体部11に設けられている。
【0018】
脚載せ部2の脚フレーム12は、金属製のフレーム部材が組み合わされてほぼ平盤形状となり、中央に背面板12aを有していて、脚フレーム12は、脚本体部11を背面側から支えるようにして取り付けている。実施形態の脚本体部11は、脚の長さ方向に二分割されていて、使用者の脹脛を載せるレッグレスト11aと、足首および足裏を載せるフットレスト11bとを有している。レッグレスト11aおよびフットレスト11bがそれぞれ脚の長さ方向に移動可能となるように、脚フレーム12はレッグレスト11aおよびフットレスト11bを取り付けている。つまり、レッグレスト11aおよびフットレスト11bは脚の長さ方向に位置調整可能であり、脚載せ部2は、使用者の脚の長さに応じて伸縮することができる。
【0019】
脚駆動部5は、脚フレーム12を前記軸心C1回りに上下回動させる機能を有している。脚フレーム12が上下回動することで脚本体部11が軸心C1回りに上下回動する。図2において、脚駆動部5は、前記伸縮アクチュエータ10の他に、前記連結部材7aの取り付けブラケット7dに左右方向の軸心C3回りに回動自在として取り付けられた第一アーム21と、同じ軸心C3回りに回動自在として取り付けられた第二アーム22とを有している。第一アーム21と第二アーム22とは、別個独立して、同じ軸心C3回りに回動自在となっていて、第一アーム21は自由に回動することができる構成である。
【0020】
第一アーム21は、取り付けブラケット7dから直線的に延びている部材であり、図4と図5とに示しているように、上に回動した状態(最上昇位置または途中位置)にある脚フレーム12を背面側から支持することができる。第一アーム21の先端部には当接部材としてローラ13が設けられていて、このローラ13が脚フレーム12の背面板12aに接触することで、脚フレーム12は背面側から第一アーム21によって支持されている。つまり、側面視において、脚フレーム12は、本体フレーム7の前記軸部材15と、第一アーム21のローラ13とによって前後で二点支持された状態にある。
【0021】
図7と図8とは第一アーム21、第二アーム22およびその周辺部の説明図である。第一アーム21は、前方または上方に面する当接板21aと、この当接板21aの左右両側から本体フレーム7側へ折れ曲がっている補強板21bとを有している。なお、図7と図8とでは、第一アーム21は、一方側の補強板21bのほぼ全体が省略された断面として示されている。
【0022】
第二アーム22は、取り付けブラケット7dから直線的に延びている直線部22aと、この直線部22aと一体である取り付け部22bとを有している。取り付け部22bは直線部22aよりも伸縮アクチュエータ10側に存在していて、伸縮アクチュエータ10の先端部10aが回動自在として取り付けられている。直線部22aは、第一アーム21の左右の補強板21bの間に存在している状態で第一アーム21の当接板21aに当接可能である。この構成によれば、第二アーム22は、図7に示しているように、上に回動した状態にある第一アーム21を上に載せた状態でその背面側から支持することができ、かつ、図8に示しているように、第二アーム22は、第一アーム21に対して回動方向の下方へ分離可能となっている。
【0023】
そして、第一アーム21の先端が第二アーム22(直線部22a)の先端よりも脚載せ部2の脚先側に位置するように、第一アーム21は第二アーム22よりも長く設定されている。つまり、第一アーム21は第二アーム22(直線部22a)よりも、本体フレーム7の前部(軸心C3)からの長さが長い。第一アーム21の基部と第二アーム22の基部とは共に、同じ取り付けブラケット7dに取り付けられているが、第二アーム22(直線部22a)の先端部は、第一アーム21の長手方向のほぼ中心位置にしか達していない。つまり、第二アーム22(直線部22a)の軸心C3からの長さは、第一アーム21の軸心C3からの長さのほぼ半分と同じである。したがって、第一アーム21の回動半径は、第二アームの回動半径よりも大きく、ほぼ二倍となっている。
【0024】
伸縮アクチュエータ10は、図示しないが、モータと、このモータの回転によって回転するナット部材と、ナット部材に螺合するねじ棒とを有していて、モータの回転によってねじ棒が進退することで、伸縮アクチュエータ10が全体として伸縮することができる。図2において、伸縮アクチュエータ10は、その基端部10bが前記第二の取り付けブラケット7eに回動自在として取り付けられている。したがって、伸縮アクチュエータ10が伸張することで、第二アーム22を強制的に押し上げて軸心C3回りに回動させることができる。そして、伸縮アクチュエータ10が短縮することで、第二アーム22を強制的に引き下げて軸心C3回りに回動させることができる。
【0025】
伸縮アクチュエータ10が伸張することにより、第二アーム22が押し上げられて上に回動すると、この第二アーム22は第一アーム21を上に回動させるように押し上げることができる。第一アーム21が上に回動すると、この第一アーム21は脚載せ部2の脚フレーム12を上に回動させるように背面側から押し上げる。この際、第一アーム21のローラ13は脚フレーム12の背面板12aを転動する。そして、脚載せ部2は最上昇位置へ達することができる(図4)。一方、前記伸縮アクチュエータ10が短縮すると、第二アーム22が下に回動するが、この第二アーム22の上に載った状態にある第一アーム21は、その自重および脚載せ部2の自重によって、脚載せ部2と共に下へ回動する。この際、第一アーム21のローラ13は、脚フレーム12の背面板12aを転動する。そして、脚載せ部2は最下位置である格納位置へ達することができる(図3)。
【0026】
また、図5に示しているように、伸縮アクチュエータ10が伸張している途中または短縮している途中で停止すると、伸縮アクチュエータ10は第二アーム22をその位置に停止させ、第二アーム22は本体フレーム7から下傾した状態となる。第一アーム21はこの第二アーム22上に載った状態で維持され、この第一アーム21のローラ13上に脚フレーム12が載った状態に維持される。なお、最上昇位置(図4)または途中位置(図5)では、第一アーム21は第二アーム22に上から載った状態であるため、第一アーム21と第二アーム22とは、回動方向上下に離れることが可能である(図8参照)。
【0027】
以上の構成を有する椅子型マッサージ機によれば、図5において、脚駆動部5により脚載せ部2の脚フレーム12を上下回動させる際、脚フレーム12には軸心C1を中心とするモーメントMが作用する。この脚フレーム12を背面側から支持している第一アーム21は、第二アーム22よりも軸心C3からの長さが長いことから、第一アーム21のローラ13は、脚フレーム12の背面板12aの内の脚先側の部分と接触した状態で、当該脚フレーム12を背面側から支持することができる。これにより、軸心C3から、第一アーム21が脚フレーム12を支持する支持点PまでのモーメントアームLが大きくなり、脚フレーム12を支持するために必要な支持点Pでの支持力を小さくすることができ、この反力として脚フレーム12の背面板12aに作用する荷重も小さくなる。このため、脚フレーム12をとりわけ強固に形成する必要がなくなり、背面板12aを薄くすることもできる。すなわち、本体フレーム7の軸部材15と第一アーム21のローラ13とによって脚の長さ方向の基部と先部側とのできるだけ離れた二点で、脚フレーム12を支持することができ、本体フレーム7に生じる曲げモーメントを小さくすることができ、構造的に有利である。なお、仮に第一アーム21の長さが短く前記モーメントアームLが短い場合、ローラ13における支持点Pで大きな曲げモーメントが本体フレーム7に作用することとなり、構造的に不利である。このようにアーム(第一アーム21)によって脚載せ部2を背面側から支持して上下回動させる場合、当該アームを、長く設定するのが好ましい。
【0028】
しかし、第一アーム21が長くなると、脚載せ部2を下に回動させている途中で床面Fとの間に存在する障害物Bに接触しやすくなる(図6参照)。なお、障害物Bとしては、例えば脚載せ部2を最上昇位置として椅子型マッサージ機を使用している途中、過ってボール等が飛んできてその脚載せ部2の下に潜り込んだ場合に、そのボールである。従来のように(図示しないが)伸縮アクチュエータと第一アームとが軸によって連結されていて伸縮アクチュエータが第一アームを直接引き下げる場合、この第一アームと床面との間でボールが挟まれると、伸縮アクチュエータは無理に第一アームを引き下げようとするため、第一アーム、伸縮アクチュエータおよびその連結部に過大な力が作用し、これらに不具合が生じてしまうおそれがある。
【0029】
そこで本発明の前記構成によれば、第一アーム21および第二アーム22は共に、本体フレーム7の前部に左右方向の軸心C3回りに回動自在として取り付けられていて、第二アーム22は第一アーム21を上に載せた状態にある。このため、第二アーム22は第一アーム21から回動方向の下方へ分離可能であり、第一アーム21を下に回動させている途中で当該第一アーム21が床面F上の障害物Bであるボールに接触しても、図6に示しているように、第一アーム21を残して、伸縮アクチュエータ10は第二アーム22のみを引き下げるように、終端まで短縮し続けることができる。このため、伸縮アクチュエータ10は、第一アーム21および脚フレーム12を無理に下へ回動させず、伸縮アクチュエータ10、第一アーム21および脚フレーム12に無理な力が作用しないため、これらに不具合が生じることを防止することができる。
【0030】
そして、第二アーム22は第一アーム21よりも短いので(回動半径が小さいので)、図4に示しているように、上に回動した第二アーム22は第一アーム21と比べて床面Fとの間に障害物Bが存在しにくい構成となっている。特に、第二アーム22の基部を取り付けている取り付けブラケット7dは、前記のとおり、本体フレーム7の上部前端よりも下方でかつ後方に位置していることから、上から見ると、座部1に隠れるようにして存在していて、さらに、この取り付けブラケット7dの下方(第二アーム22の回動軌跡の下下方)には、本体フレーム7の前端下部にある前方へ膨らんだフレーム部分7f、および、本体フレーム7の前端に設けられるカバー部材(図示せず)が存在しているので、第二アーム22と床面Fとの間に、障害物Bが入り込むスペースは存在せず、または、存在していてもごく僅かである。
【0031】
以上の構成を有する前記椅子型マッサージ機が備えている別の機能について説明する。図4において、脚載せ部2は使用者の脚を支持するものであるため、使用者の全体重の内の主として脚部分の体重が作用するはずであるが、例えば、脚載せ部2が上に回動した状態で、子供が脚載せ部2のみに乗ると(体重をかけると)、その荷重が異常荷重F0として脚載せ部2に作用してしまう。この場合、脚載せ部2がそのままの姿勢を維持していると、脚載せ部2、伸縮アクチュエータ10およびその連結部に過大な力が作用し、不具合が生じるおそれがある。そこで、この椅子型マッサージ機は、最上昇位置または途中位置のように上に回動した状態にある脚載せ部2に対して上から異常荷重F0が作用すると、当該脚載せ部2を下へ回動させる退避手段を備えている。
【0032】
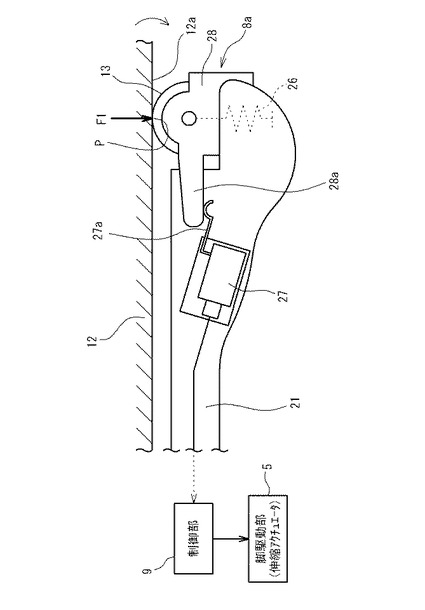
退避手段の第一の形態を図9において説明する。図9は第一アーム21の先部および脚載せ部2の脚フレーム12(背面板12a)を示している。退避手段8aは、脚載せ部2に作用する異常荷重を検出するためのセンサ27と、このセンサ27の検出信号に基づいて前記伸縮アクチュエータ10によって脚載せ部2を下へ回動させる制御をする制御部9とを有している。脚載せ部2の脚本体部11に前記異常荷重F0(図4参照)が作用すると、その荷重F0は脚フレーム12を介して、本体フレーム7の軸部材15および第一アーム21のローラ13に作用する。図9では、ローラ13に作用する荷重成分をF1として示している。
【0033】
第一アーム21の先端部のローラ13は、取り付け部材28に回転自在に取り付けられていて、この取り付け部材28は、第一アーム21の先端部に設けられた第一の軸41によって回動可能として取り付けられている。つまり、取り付け部材28は、第一の軸41の左右水平方向に延びる軸心回りに回動可能である。また、取り付け部材28は、第一アーム21の基部側へ延びているレバー部28aを有している。そして、第一アーム21の側面に前記センサ27が取り付けられていて、このセンサ27は第一アーム21の先端部側へ延びているセンサアーム27aを有している。
取り付け部材28の一部28bには、第二の軸43が取り付けられていて、第一アーム21には第三の軸44が取り付けられている。そして、第二の軸43と第三の軸44との間に、引っ張りバネ46が取り付けられていて、このバネ46は、レバー部28aをセンサアーム27aから離そうとする方向(図9の矢印Qと反対の方向)に、取り付け部材28を付勢している。
【0034】
図4および図9において、上に回動した状態にある脚フレーム12に上から異常荷重F0による荷重F1が作用すると、脚フレーム12は軸心C1回りに回動自在であることから、脚フレーム12はローラ13および取り付け部材28を押し下げ、脚フレーム12は第一アーム21に対して回動方向の下へ位置変化することができる。つまり、脚フレーム12は第一アーム21に接近する。脚フレーム12がローラ13および取り付け部材28を押し下げることによって、ローラ13および取り付け部材28は、前記引っ張りバネ46に抗して、第一の軸41の軸心回り(図9の矢印Qの方向)に回動することができる。
【0035】
以上の構成によれば、脚載せ部2に異常荷重F0が作用すると、脚フレーム12はローラ13および取り付け部材28を押し下げて第一アーム21に対して下へ位置変化する。つまり、異常荷重F0によって脚フレーム12からローラ13に荷重F1が作用すると、当該脚フレーム12に押されたローラ13は、バネ46(図12ではバネ26)に抗して取り付け部材28と共に、図9の矢印Qの方向に変位し、レバー部材28aがセンサアーム27aを押し下げる。センサアーム27aが押し下げられると、センサ27はこれを検出する。つまり、センサ27によって脚フレーム12の位置変化を検出することができる。そして、制御部9はセンサ27からの検出信号を受信すると、この検出信号に基づいて、制御部9は伸縮アクチュエータ10を短縮させ脚フレーム12を下へ回動させる制御を開始する。なお、制御部9はマイコンからなり、伸縮アクチュエータ10の動作を制御する機能を有している。
【0036】
また、図12は図9の変形例を示している。この図12の形態では図9の形態と比べて、取り付け部材28および前記バネ46が異なる。図12の場合、取り付け部材28は、第一アーム21の先端部に脚フレーム12の回動方向の下方(図12では下)へ変位可能として取り付けられている。さらに、取り付け部材28(ローラ13)は回動方向の上方(図12では上)へ、バネ26によって弾性的に付勢されている。したがって、図4および図12において、上に回動した状態にある脚フレーム12に上から異常荷重F0による荷重F1が作用すると、脚フレーム12がローラ13および取り付け部材28を押し下げ、ローラ13および取り付け部材28が沈み込んで、脚フレーム12は第一アーム21に対して回動方向の下へ位置変化することができる。これにより、レバー部材28aがセンサアーム27aを押し下げ、センサ27はこの押し下げを検出する。そして、制御部9はセンサ27からの検出信号を受信すると、この検出信号に基づいて、制御部9は伸縮アクチュエータ10を短縮させ脚フレーム12を下へ回動させる制御を開始する。
【0037】
図9および図12のそれぞれの形態において、異常荷重F0によってローラ13に作用する荷重F1が、予め設定されている所定の値に達すると、センサ27が検出信号を出力するように、バネ46(バネ26)の強さ(バネ係数)は設定されている。すなわち、脚載せ部2に使用者の脚の荷重(体重)が作用しているのみでは、バネ46の変形は小さく、センサ27は検出信号を出力しないが、ローラ13に子供の体重程度の荷重が作用すると、バネ46は大きく変形し、センサ27は検出信号を制御部9へ出力するように、バネ46の強さは設定されている。バネ46の強さの設定の具体例は、脚載せ部2が最上昇位置にある状態で、ローラ13の直上の部位に対して下向きに150N〜250N(15kgf〜25kgf)の荷重が作用すると、センサ27は検出信号を出力するように設定されている。特に、本発明では、脚載せ部2を背面側から支持する第一アーム21が長く設定されているため、脚フレーム12を支持するローラ13における接触力を小さくすることができる。このため、子供の体重程度の荷重が脚載せ部2に作用するとセンサ27を機能させるにしても、バネ46の強さを小さく設定することができ(弱いバネとすることができ)、センサ27による検出感度を高めることができる。
【0038】
この退避手段8aによれば、上に回動した状態にある脚載せ部2に対して上から異常荷重F0が作用すると、脚フレーム12は第一アーム21に対して回動方向の下へ位置変化する。センサ27がこの位置変化を検出すると、制御部9は、伸縮アクチュエータ10を短縮させ脚フレーム12を下へ回動させることができる。このため、異常荷重F0が作用した脚載せ部2を下方へ回動させることで、当該異常荷重F0を脚載せ部2からいなすことができ、脚駆動部5や脚載せ部2が損傷することを防止することができる。
【0039】
また、伸縮アクチュエータ10と制御部9との内の少なくとも一方による機能によって、伸縮アクチュエータ10の短縮速度を変更可能とするように構成されているのがよい。すなわち、本発明の椅子型マッサージ機において、マッサージを行うための通常時に脚載せ部2を上下回動させる場合、第一の速度(低速)で伸縮アクチュエータ10は伸縮するが、制御部9がセンサ27から検出信号を受信すると、伸縮アクチュエータ10を第一の速度よりも早い第二の速度(高速)で短縮させるように構成されているのが好ましい。これにより、脚載せ部2に異常荷重F0が作用すると、脚載せ部2を迅速に下方回動させてその荷重をいなすことができ、脚載せ部2および脚駆動部5の破損を防止することができる。
【0040】
図10と図11は、退避手段の他の実施形態の説明図である。この退避手段を備えている椅子型マッサージ機は、図1と図2に示した椅子型マッサージ機と比べて、脚駆動部5のアームの構成および退避手段が異なる他は、ほぼ同じである。図10の脚駆動部5では、脚フレーム12と伸縮アクチュエータ10との間に存在して脚フレーム12を背面側から支持する部材は、一本のアーム31からなる。そして、脚駆動部5は、前記実施形態と同様に(図2を参考)、基部が本体フレーム7の第二ブラケット7eに回動自在に取り付けられ、かつ、伸張することで、先部によって脚載せ部2を押し上げて回動させる伸縮アクチュエータ10を有している。
【0041】
図10の退避手段8bは、脚載せ部2に前記のような異常荷重が作用すると、その状態での伸縮アクチュエータ10の全長を変えないで、当該伸縮アクチュエータ10の先端部10a(先部)を脚載せ部2の脚先側(図10では右側)へ移動させるガイド部32を有している。退避手段8bの具体的な構成を説明すると、ガイド部32は、アーム31の側面に設けられた長孔34からなり、長孔34はアーム31の長手方向に沿って形成されている。伸縮アクチュエータ10の先端部10aと、アーム31とは、左右方向の軸心を有するピン部材35によって回動自在に連結されていて、さらに、このピン部材35は長孔34内を移動することができる。
【0042】
ピン部材35とアーム31の基部との間には、ピン部材35をアーム31の基部(軸心C3)側へ付勢する弾性部材(以下、バネとして説明する)36が取り付けられている。バネ36は所定の強さ(バネ係数)に設定されており、前記異常荷重(異常荷重によってアーム31の先端にあるローラ13に所定の荷重F1)が作用すると、ピン部材35を長孔34の先端部34aへ移動させることができるが、この異常荷重(荷重F1)が作用していない通常時では、ピン部材35を長孔34の基端部34bに位置させることができる強さに、バネ36は設定されている。
【0043】
この椅子型マッサージ機によってマッサージを行うために、伸縮アクチュエータ10が伸張して脚載せ部2を上下回動させる場合、バネ36はピン部材35を軸心C3側へ付勢していることから、ピン部材35は長孔34の先端部34a側へ移動しないで基端部34b側に位置し、当該ピン部材35は長孔34の上面を上に押圧し、アーム31を上に回動させることができる。これにより、脚載せ部2を上に回動させることができる。また、脚載せ部2を下に回動させる場合、伸縮アクチュエータ10を短縮させると、ピン部材35は長孔34の基端部34b側に位置し、当該ピン部材35によってアーム31を回動方向の下方へ引き込み、アーム31を下に回動させることができる。これにより、脚載せ部2を下に回動させることができる。
【0044】
しかし、図10に示しているように、脚載せ部2に前記異常荷重が作用した場合に、この異常荷重によって脚フレーム12はアーム31の先端のローラ13を荷重F1で押すこととなり、アーム31は軸心C3回りに下へ回動しようとする力が作用する。この際、伸縮アクチュエータ10の先端部10aのピン部材35は、前記バネ36に抗して、長孔34に沿ってアーム31の長さ方向の前方側に移動(退避)することができるので、図11に示しているように、このピン部材35の移動に伴い、アーム31が軸心C3を中心として下に回動すると共に、その状態にあった伸縮アクチュエータ10は長さを変えないで基端部10bを回動中心として下に回動することができる。これにより、脚載せ部2も軸心C1を中心として下に回動することができ、前記異常荷重を脚載せ部2から瞬間的にいなすことができ、脚載せ部2および脚駆動部5の破損を防止することができる。
【0045】
なお、図10と図11では、一本のアーム31を有している場合を説明したが、図2の実施形態のように二本のアーム(第一アーム21と第二アーム22)を備えている椅子型マッサージ機に、図9の退避手段8aの代わりに図10の退避手段8bを適用してもよい。この場合、第二アーム22に前記長孔34およびバネ36を設ければよい。
【0046】
図13は、他の実施形態の椅子型マッサージ機が備えている本体フレーム7および脚駆動部5の斜視図である。図14は、脚駆動部5の要部の断面図である。なお、図14では、第一アーム21と第二アーム22とが離れた状態として記載されている。
図13において、本体フレーム7の構成は、図2の実施形態のものと同様である。また、脚駆動部5は、図2の実施形態と同様に、脚載せ部2(図1参照)を軸心C1回りに上下回動させる機能を備えている。つまり、脚駆動部5は、伸縮アクチュエータ10と、本体フレーム7が有する取り付けブラケット7dに左右方向の軸心C3回りに回動自在として取り付けられた第一アーム21と、同じ軸心C3回りに回動自在として取り付けられた第二アーム22とを有している。第一アーム21と第二アーム22とは、別個独立して、同じ軸心C3回りに回動自在となっていて、第一アーム21は自由に回動することができる。
【0047】
図2の実施形態と異なる点は、図13の第一アーム21は(回動方向の)厚さよりも左右方向の幅が大きく構成されていて、これに対応して第二アーム22も幅広に構成されている点である。第一アーム21と第二アーム22とを幅広とすることで、強度を高めることができ、また、幅広とすることで、第一アーム21の先部の左右両端にローラ13をそれぞれ設けることができ、左右一対のローラ13によって脚載せ部2(図1参照)を左右方向に安定して支持することができる。
【0048】
さらに、第一アーム21が有している前方または上方に面する当接板21a及びこの当接板21aの左右両側から本体フレーム7側へ折れ曲がっている補強板21bによって、第一アーム21は、伸縮アクチュエータ10側に開口しているボックス構造が得られる。そこで、前記実施形態(図9)と同様のセンサ27が、図14に示しているように、ボックス型である第一アーム21内に格納されている。このように、図14の実施形態では、第一アーム21がセンサ27を覆って保護することができる。
【0049】
図14において、第一アーム21の先端部のローラ13は、取り付け部材28に回転自在に取り付けられていて、この取り付け部材28は、第一アーム21の先端部に設けられた軸41によって回動可能として取り付けられている。取り付け部材28は左右方向に長く形成されていて(図13参照)、この取り付け部材28の左右両側にローラ13が位置している。
取り付け部材28は、第一アーム21の基部側の位置に当接部28cを有している。そして、第一アーム21の内部にある内部部材23に前記センサ27が取り付けられていて、このセンサ27は第一アーム21の先端部側へ延びているセンサアーム27aを有している。前記軸41には、コイルバネ(図示せず)が取り付けられていて、このコイルバネは、当接部28cをセンサアーム27aから離そうとする方向に、取り付け部材28を付勢している。
【0050】
そして、上に回動した状態にある脚フレーム12に上から異常荷重が作用し、この異常荷重によって荷重F1が作用すると、脚フレーム12は軸心C1(図13参照)回りに回動自在であることから、脚フレーム12はローラ13および取り付け部材28を押し下げる。これにより、ローラ13および取り付け部材28は、前記コイルバネに抗して、軸41の軸心回り(図14の矢印Qの方向)に回動する。これにより、当接部28cがセンサアーム27aを押し下げ、センサ27はこれを検出する。そして、制御部9がセンサ27からの検出信号を受信し、この検出信号に基づいて、制御部9は伸縮アクチュエータ10を短縮させ脚フレーム12を下へ回動させる制御を開始する。以上のように、図13の椅子型マッサージ機も、上に回動した状態にある脚載せ部2に対して上から異常荷重が作用すると、当該脚載せ部2を下へ回動させる退避手段を備えている。
【0051】
図14の第一アーム21は、固定側である取り付けブラケット7dに対して回動するが、第一アーム21の基端21eと、取り付けブラケット7dの先端7jとの間で、使用者の身体の一部(例えば手指)が挟まれるのを防止する挟み防止部を、このマッサージ機は有している。挟み防止部は、第一アーム21内の内部部材23から延長している部分であって、軸心C3を中心として円弧形状に形成された円弧壁部24からなる。円弧壁部24は、図13に示しているように、第一アーム21の左右方向のほぼ全長にわたって形成されている。そして、第一アーム21が軸心C3回りに回動しても、全回動ストロークにおいて、円弧壁部24の外周面が、取り付けブラケット7dの前記先端7jに近接した状態であり、かつ、円弧壁部24の少なくとも先端部24aが、取り付けブラケット7d内に収納された状態となっていることにより、手指等の挟まれを防止することができる。
【0052】
以上のように、本発明の前記各実施形態によれば、脚載せ部2が下へ回動する際に、図6に示しているように、床面Fとの間に存在している障害物Bに接触しても、脚載せ部2および脚駆動部5等に無理な力が作用しないため、脚載せ部2を上下回動させるための機器の不具合の発生を防止することができる。また、脚載せ部2に上から異常荷重が作用しても、その異常荷重を脚載せ部2でいなすことができ、脚載せ部2を上下回動させるための機器の不具合の発生を防止することができる。
【0053】
また、前記実施形態では、脚駆動部5の伸縮アクチュエータ10を、ナット部材とねじ棒とを有する構成として説明したが、脚載せ部2を上下回動させるアクチュエータは、これ以外であってもよく、エアの供給または排出によって膨張または収縮するエアセルであってもよい。つまり、本体フレーム7の前部と、脚載せ部2の脚フレーム12との間にエアセルを介在させ、本体フレーム7内に設けられたエア供給ユニットによってエアセルにエアを供給して、当該エアセルを膨張させることにより、脚載せ部2を押し上げて回動させることができる。そして、エアセルのエアを排気させると、脚載せ部2は下に回動する。この脚駆動部5によれば、脚載せ部2に前記異常荷重が作用した場合、脚載せ部2または本体フレーム7に取り付けたセンサによって前記異常荷重の発生を検出し、この検出信号に基づいて制御部9によってエア供給ユニットを排気状態とすることでエアセルのエアを排気可能な状態とすれば、脚載せ部2の荷重によってエアセルは迅速に収縮することができ、脚載せ部2を、通常時に回動させる場合よりも迅速に、下方へ回動させることができる。したがって、脚載せ部2に異常荷重が作用しても、この異常荷重を脚載せ部2からいなすことができる。
【0054】
また、本発明の椅子型マッサージ機は、図示する形態に限らず本発明の範囲内において他の形態のものであってもよい。前記実施形態(図1)では、脚載せ部2の脚本体部11に、マッサージ具としてのエアセルを設けた場合を説明したが、座部1と脚本体部11との内の少なくとも一方にマッサージ具が設けられていればよい。そして、マッサージ具は、エアセル以外に、図示しないが、施療子を端部に取り付けたアームと、このアームを駆動する駆動部とを有するものであってもよい。また、背凭れ部3にマッサージ具が設けられていてもよい。
【図面の簡単な説明】
【0055】
【図1】本発明の椅子型マッサージ機の実施の一形態を示す斜視図である。
【図2】本体フレームおよび脚駆動部の斜視図である。
【図3】脚載せ部、本体フレームおよび脚駆動部の側面図であり、脚載せ部が格納位置にある状態を示している。
【図4】脚載せ部、本体フレームおよび脚駆動部の側面図であり、脚載せ部が最上昇位置にある状態を示している。
【図5】脚載せ部、本体フレームおよび脚駆動部の側面図であり、脚載せ部が途中位置にある状態を示している。
【図6】脚載せ部、本体フレームおよび脚駆動部の側面図であり、第一アームが障害物に当接した状態を示している。
【図7】第一アーム、第二アームおよびその周辺部の説明図である。
【図8】第一アーム、第二アームおよびその周辺部の説明図である。
【図9】退避手段の第一の形態を説明する説明図である。
【図10】退避手段の他の形態の説明図である。
【図11】退避手段の他の形態の説明図である。
【図12】図9の退避手段の変形例を示している説明図である。
【図13】他の実施形態の椅子型マッサージ機が備えている本体フレームおよび脚駆動部の斜視図である。
【図14】脚駆動部の要部の断面図である。
【符号の説明】
【0056】
1 座部
2 脚載せ部
5 脚駆動部
6 マッサージ具
7 本体フレーム
8a,8b 退避手段
9 制御部
10 伸縮アクチュエータ
11 脚本体部
12 脚フレーム
13 ローラ
21 第一アーム
22 第二アーム
27 センサ
31 アーム
32 ガイド部
C1 脚載せ部の回動軸心
C3 第一、第二アームの回動軸心
F 床面
【特許請求の範囲】
【請求項1】
床面に置かれる本体フレームと、
この本体フレームに設けられ使用者が着座する座部と、
前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚載せ部と、
前記脚載せ部を前記軸心回りに上下回動させる脚駆動部と、
前記座部と前記脚載せ部との内の少なくとも一方に設けられたマッサージ具と、を備えた椅子型マッサージ機であって、
上に回動した状態にある前記脚載せ部に対して上から異常荷重が作用すると、当該脚載せ部を下へ回動させる退避手段を備えていることを特徴とする椅子型マッサージ機。
【請求項2】
前記退避手段は、前記異常荷重を検出するためのセンサと、このセンサの検出信号に基づいて前記脚駆動部によって前記脚載せ部を下へ回動させる制御をする制御部と、を有している請求項1に記載の椅子型マッサージ機。
【請求項3】
前記脚駆動部は、基部が前記本体フレームに回動自在に取り付けられかつ伸張することで前記脚載せ部を押し上げて回動させる伸縮アクチュエータを有し、
前記退避手段は、前記異常荷重が作用すると、前記伸縮アクチュエータの全長を変えないで、当該伸縮アクチュエータの先部を前記脚載せ部の脚先側へ移動させることにより前記脚載せ部を下へ回動させるガイド部を有している請求項1に記載の椅子型マッサージ機。
【請求項4】
床面に置かれる本体フレームと、
この本体フレームに設けられ使用者が着座する座部と、
使用者が脚を載せる脚本体部と、この脚本体部を支持しかつ前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚フレームとを有する脚載せ部と、
前記脚フレームを前記軸心回りに上下回動させる脚駆動部と、
前記座部と前記脚本体部との内の少なくとも一方に設けられたマッサージ具と、を備えた椅子型マッサージ機であって、
前記脚駆動部は、
前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられ、かつ、前記脚フレームを背面側から支持する第一アームと、
前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられ、前記第一アームを背面側から支持することができ、かつ、前記第一アームとは回動方向の下方へ分離可能な第二アームと、
伸張することで前記第二アームを押し上げて前記軸心回りに回動させかつ短縮することで前記第二アームを引き下げて前記軸心回りに回動させる伸縮アクチュエータと、を有し、
前記第一アームの先端が前記第二アームの先端よりも前記脚載せ部の脚先側に位置するように、前記第一アームは前記第二アームよりも長いことを特徴とする椅子型マッサージ機。
【請求項5】
上に回動した状態にある前記脚載せ部に対して上から異常荷重が作用すると、当該脚載せ部を下へ回動させる退避手段を更に備え、
前記脚フレームは、前記異常荷重が作用すると、前記第一アームに対して回動方向の下へ位置変化するように設けられ、
前記退避手段は、前記位置変化を検出するセンサと、このセンサの検出信号に基づいて前記伸縮アクチュエータを短縮させ前記脚フレームを下へ回動させる制御をする制御部と、を有する請求項4に記載の椅子型マッサージ機。
【請求項1】
床面に置かれる本体フレームと、
この本体フレームに設けられ使用者が着座する座部と、
前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚載せ部と、
前記脚載せ部を前記軸心回りに上下回動させる脚駆動部と、
前記座部と前記脚載せ部との内の少なくとも一方に設けられたマッサージ具と、を備えた椅子型マッサージ機であって、
上に回動した状態にある前記脚載せ部に対して上から異常荷重が作用すると、当該脚載せ部を下へ回動させる退避手段を備えていることを特徴とする椅子型マッサージ機。
【請求項2】
前記退避手段は、前記異常荷重を検出するためのセンサと、このセンサの検出信号に基づいて前記脚駆動部によって前記脚載せ部を下へ回動させる制御をする制御部と、を有している請求項1に記載の椅子型マッサージ機。
【請求項3】
前記脚駆動部は、基部が前記本体フレームに回動自在に取り付けられかつ伸張することで前記脚載せ部を押し上げて回動させる伸縮アクチュエータを有し、
前記退避手段は、前記異常荷重が作用すると、前記伸縮アクチュエータの全長を変えないで、当該伸縮アクチュエータの先部を前記脚載せ部の脚先側へ移動させることにより前記脚載せ部を下へ回動させるガイド部を有している請求項1に記載の椅子型マッサージ機。
【請求項4】
床面に置かれる本体フレームと、
この本体フレームに設けられ使用者が着座する座部と、
使用者が脚を載せる脚本体部と、この脚本体部を支持しかつ前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられた脚フレームとを有する脚載せ部と、
前記脚フレームを前記軸心回りに上下回動させる脚駆動部と、
前記座部と前記脚本体部との内の少なくとも一方に設けられたマッサージ具と、を備えた椅子型マッサージ機であって、
前記脚駆動部は、
前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられ、かつ、前記脚フレームを背面側から支持する第一アームと、
前記本体フレームの前部に左右方向の軸心回りに回動自在として取り付けられ、前記第一アームを背面側から支持することができ、かつ、前記第一アームとは回動方向の下方へ分離可能な第二アームと、
伸張することで前記第二アームを押し上げて前記軸心回りに回動させかつ短縮することで前記第二アームを引き下げて前記軸心回りに回動させる伸縮アクチュエータと、を有し、
前記第一アームの先端が前記第二アームの先端よりも前記脚載せ部の脚先側に位置するように、前記第一アームは前記第二アームよりも長いことを特徴とする椅子型マッサージ機。
【請求項5】
上に回動した状態にある前記脚載せ部に対して上から異常荷重が作用すると、当該脚載せ部を下へ回動させる退避手段を更に備え、
前記脚フレームは、前記異常荷重が作用すると、前記第一アームに対して回動方向の下へ位置変化するように設けられ、
前記退避手段は、前記位置変化を検出するセンサと、このセンサの検出信号に基づいて前記伸縮アクチュエータを短縮させ前記脚フレームを下へ回動させる制御をする制御部と、を有する請求項4に記載の椅子型マッサージ機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−51637(P2010−51637A)
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願番号】特願2008−221077(P2008−221077)
【出願日】平成20年8月29日(2008.8.29)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願日】平成20年8月29日(2008.8.29)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]