
椅子式マッサージ機
【課題】下肢保持部が、施療者の所望するマッサージ位置とずれた位置に配置されることを抑制し、施療者の所望するマッサージ位置にて、より的確な施療を行うことが可能な椅子式マッサージ機を提供する。
【解決手段】座部と、座部の前方に回動可能に設けられた第一下肢保持部1と、第一下肢保持部1に隣接するように設けられた第二下肢保持部2と、第二下肢保持部2の第一下肢保持部1と反対側に隣接するように設けられた第三下肢保持部3と、第一下肢保持部1、第二下肢保持部2および第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部Oとを備える。足載せ部Oの第二下肢保持部2および第三下肢保持部3は、それぞれ互いに独立して、第1下肢保持部1に対し施療者の脚の長手方向にスライド移動可能に構成される。
【解決手段】座部と、座部の前方に回動可能に設けられた第一下肢保持部1と、第一下肢保持部1に隣接するように設けられた第二下肢保持部2と、第二下肢保持部2の第一下肢保持部1と反対側に隣接するように設けられた第三下肢保持部3と、第一下肢保持部1、第二下肢保持部2および第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部Oとを備える。足載せ部Oの第二下肢保持部2および第三下肢保持部3は、それぞれ互いに独立して、第1下肢保持部1に対し施療者の脚の長手方向にスライド移動可能に構成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、着座した施療者にマッサージを行う椅子式のマッサージ機であって、特に施療者の下肢部をマッサージするものに関する。
【背景技術】
【0002】
従来、施療者の下肢部をマッサージする施療子を含む足載せ部を備える椅子式マッサージ機が知られている(たとえば、特許文献1参照)。上記特許文献1には、脚の長さ方向に隣接して並ぶように配置される3つの脚保持部材(下肢保持部)が設けられた足載せ部を備えるマッサージ機が開示されている。この特許文献1によるマッサージ機の3つの脚保持部材のうち施療者の足先側の脚保持部材には、施療者の足裏と対応する押し当て面が設けられている。また、特許文献1によるマッサージ機には、施療者が足裏で足先側の脚保持部材の押し当て面を押し出した場合に、3つの脚保持部材がそれぞれ連動して施療者の脚の長さに対応した位置に一義的に配置されるように設定されたリンク機構が設けられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4121012号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1によるマッサージ機は、足先側の脚保持部材の押し当て面が押し出された場合に、リンク機構によって、3つの脚保持部材(下肢保持部)がそれぞれ連動して施療者の脚の長さに対応した位置に一義的に配置されるため、3つの脚保持部材が施療者の脚の長さに一対一に対応する予め定められた位置に固定的に配置される。このため、脚の根元側の施療部位に対応する脚保持部材(下肢保持部)と、脚の根元側の施療部位に対応する脚保持部材に隣接する脚保持部材との位置が、施療者の所望するマッサージ位置とずれた位置に配置される場合があるという問題点がある。
【0005】
そこで、この発明は、下肢保持部が、施療者の所望するマッサージ位置とずれた位置に配置されることを抑制し、施療者の所望するマッサージ位置にて、より的確な施療を行うことが可能な椅子式マッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、上記のような課題を解決するためになされたものであり、以下(1)〜(13)の手段を講じている。
(1)本発明の第一の局面の椅子式マッサージ機は、座部と、
前記座部の前方に回動可能に設けられた第一下肢保持部と、前記第一下肢保持部に隣接するように設けられた第二下肢保持部と、前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接するように設けられた第三下肢保持部と、前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部とを備え、
前記足載せ部の第二下肢保持部及び第三下肢保持部は、それぞれ互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能に構成される。
【0007】
このように、第二下肢保持部と第三下肢保持部とのそれぞれを、互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能とすることによって、第二下肢保持部及び第三下肢保持部をそれぞれ任意のスライド移動位置、すなわち、施療者の所望する位置に独立配置することができる。その結果、施療者の所望するマッサージ位置にて、より的確な施療を行うことが可能となる。
【0008】
(2)前記椅子式マッサージ機において、前記第一下肢保持部及び前記第三下肢保持部とは独立して、前記第二下肢保持部を施療者の脚の長手方向へスライド移動させるための駆動源をさらに備えることが好ましい。
【0009】
このように構成すれば、例えば、第三下肢保持部を施療者の脚の長さに対応するように所定のスライド位置に配置し、第一下肢保持部と第三下肢保持部との間の間隔を保ったまま、駆動源を駆動することにより、第二下肢保持部を施療者の脚の長手方向へスライド移動させることができる。これにより、第一下肢保持部、第三下肢保持部のそれぞれの施療子により施療マッサージを行いながら、さらにその間の範囲内の任意の位置で第二下肢保持部による施療マッサージを行うことが可能となる。
【0010】
(3)前記いずれか記載の椅子式マッサージ機において、前記第一下肢保持部を支持し、前記座部の前方に回動可能に設けられた第一支持部材と、
前記第二下肢保持部を支持し、前記第一支持部材に対して施療者の脚の長手方向にスライド移動可能な第二支持部材とをさらに備え、
前記駆動源は、前記第二支持部材を前記第一支持部材に対して施療者の脚の長手方向にスライド移動させるように構成することが好ましい。
【0011】
このように構成すれば、第一支持部材と第一支持部材に対してスライド移動可能に取り付けられる第二支持部材とにより、強度を確保しながら第一、第二下肢保持部を支持することができるので、比較的安定した状態で第二下肢保持部を確実にスライド移動させることができる。
【0012】
(4)前記いずれか記載の椅子式マッサージ機において、前記第一下肢保持部は、前記座部に対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さないことが好ましい。
【0013】
このように構成すれば、第一下肢保持部の回動時に、第一下肢保持部が脚の長手方向に実質的に移動されることがない。このため、第一下肢保持部の回動角度調節に伴う施療者の各下肢角度において、施療者のひざ下近傍の足のつぼや筋肉を的確に刺激することができる。すなわち、この構成は、前記第一下肢保持部が、前記座部に対し、前記施療者の脚の長手方向への実質的なスライド移動を伴うことなく回動するように支持されていることを意味する。上記「施療者の脚の長手方向への移動距離調節」或いは「脚の長手方向への実質的なスライド移動」とは、施療者のひざ下の近傍から足先へ向かう部分の施療位置がずれることを意味しており、上記構成は、第一下肢保持部の回動角度を調節可能であると共に、回動動作に伴って施療者のひざ下から足先へ向かう部分の施療位置が脚の長手方向で変わることがない構成を特定する。ただし、回動機構によっては、ガタつきや機構上の遊び、或いは弾性材を介した弾性移動等によって、脚の長手方向への多少の移動を伴う場合がある。上記「施療者の脚の長手方向への実質的なスライド移動を伴うことなく」とは、施療位置のずれを伴わない程度での前記脚の長手方向への多少の移動を許容する意味である。
【0014】
(5)前記いずれか記載の椅子式マッサージ機において、前記座部、第一下肢保持部又は第二下肢保持部の少なくともいずれかと、前記第三下肢保持部との間に、第三下肢保持部を弾性支持する弾性支持部材をさらに備え、
第三下肢保持部は、施療者の足裏を当接させて足を収容する足収容部を有し、
前記足収容部に施療者の足を収容して前記足載せ部に施療者の下肢をセットすることにより、前記第三下肢保持部がスライド移動し、前記弾性支持部材は、第三下肢保持部のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置において、第三下肢保持部を、前記第三下肢保持部側向きの弾性反力が生じた状態で弾性支持するように構成されていることが好ましい。
【0015】
このように構成すれば、施療者の足を第三下肢保持部内へセットすることにより、施療者の脚部の長さに応じて第三下肢保持部の弾性支持位置が弾性反力によって可変する。この場合において、足収容部内に収容した施療者の足裏に、弾性反力による第三下肢保持部からの面圧がかかることとなる。これにより、セットした足裏と第三下肢保持部とが離れることなく適度な弾性反力を持って当接したまま、施療者の下肢を確実に収容保持することが可能となるので、より的確な位置に施療子を調節することが可能となる。
【0016】
(6)本発明の第二の局面の椅子式マッサージ機は、座部と、
前記座部の前方に回動可能に設けられた第一下肢保持部と、前記第一下肢保持部に隣接するように設けられた第二下肢保持部と、前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接するように設けられた第三下肢保持部と、前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部と、
前記第一下肢保持部と前記第三下肢保持部との間の移動可能範囲内で、前記第一下肢保持部の移動又は回動動作、及び、前記第三下肢保持部の移動動作とは独立して、前記第二下肢保持部を施療者の脚の長手方向にスライド移動させるための駆動源とを備える。
【0017】
上記構成によれば、第一下肢保持部と第三下肢保持部との間で、第一下肢保持部及び第三下肢保持部とは独立して第二下肢保持部を施療者の脚の長手方向にスライド移動させるための駆動源を設けることによって、従来技術である3つの下肢保持部がリンク機構により連動して予め定められた位置に移動する構成とは異なり、駆動源を駆動することにより、第一下肢保持部及び第三下肢保持部とは独立して第二下肢保持部を施療者の所望する部位に移動させることができる。これにより、下肢保持部の位置が施療者の所望するマッサージ位置とずれた位置に配置されることを抑制することができる。すなわち、駆動源により、第一下肢保持部の移動又は回動及び前記第三下肢保持部の移動動作とは独立させたまま、第二下肢保持部をスライド移動させることで、例えば、脚の長さを施療者に適した脚の長さに合わせた状態で、第二下肢保持部による施療位置を、独立した駆動源によって容易に調節できるものとなる。
【0018】
(7)前記(6)記載の椅子式マッサージ機において、前記第一下肢保持部は、前記座部に対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さないことが好ましい。このように構成すれば、第一下肢保持部の回動時に、第一下肢保持部が脚の長手方向位置に実質的に移動されることがない。このため、第一下肢保持部の回動角度調節に伴う施療者の各下肢角度において、施療者のひざ下近傍のつぼや筋肉を的確に刺激することができる。
【0019】
すなわち、この構成は、前記第一下肢保持部が、前記座部に対し、施療者の脚の長手方向への実質的なスライド移動を伴うことなく回動するように支持されていることを意味する。上記「脚施療者の脚の長手方向への移動距離調節」或いは「脚の長手方向への実質的なスライド移動」とは、施療者のひざ下の近傍から足先へ向かう部分の施療位置がずれることを意味しており、上記構成は、第一下肢保持部の回動角度を調節可能であると共に、回動動作に伴って施療者のひざ下から足先へ向かう部分の施療位置が脚の長手方向で変わることがない構成を特定する。ただし、回動機構によっては、ガタつきや機構上の遊び、或いは弾性材を介した弾性移動等によって、脚の長手方向への多少の移動を伴う場合がある。上記「施療者の脚の長手方向への実質的なスライド移動を伴うことなく」とは、施療位置のずれを伴わない程度での前記脚の長手方向への多少の移動を許容する意味である。
【0020】
(8)前記(6)又は(7)に記載の椅子式マッサージ機において、前記第三下肢保持部は、前記第一下肢保持部及び前記第二下肢保持部の少なくともいずれか一方の移動又は回動動作とは独立して、施療者の脚の長手方向にスライド移動するように構成されていることが好ましい。
【0021】
このような構成であれば、例えば、第一下肢保持部を所定の回動角度に調節すると共に第二下肢保持部を所定のスライド位置に配置して施療者の下肢をセットした状態のまま、第三下肢保持部を施療者の脚の長手方向へスライド移動させることができる(例えば後述の図12参照)。これにより、第一下肢保持部、第二下肢保持部のそれぞれによる施療マッサージを行いながら、さらに第二下肢保持部よりも脚の先端側の範囲内の任意のスライド位置で第三下肢保持部による施療マッサージを行うことが可能となる。
【0022】
(9)前記(6)(7)又は(8)のいずれか記載の椅子式マッサージ機において、 前記座部、前記第一下肢保持部又は第二下肢保持部の少なくともいずれかと、前記第三下肢保持部との間に、前記第三下肢保持部を弾性支持する弾性支持部材をさらに備え、
前記第三下肢保持部は、施療者の足裏を当接させて足を収容する足収容部を有し、
前記足収容部に施療者の足を収容して前記足載せ部に施療者の下肢をセットすることにより、前記第三下肢保持部がスライド移動し、
前記弾性支持部材は、前記第三下肢保持部のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置で前記第三下肢保持部を弾性支持するように構成されていることが好ましい。
【0023】
このように構成すれば、施療者の足を第三下肢保持部内へセットすることにより、施療者の脚部の長さに応じて第三下肢保持部の弾性支持位置が弾性反力によって可変する。この場合において、足収容部内に収容した施療者の足裏に、弾性反力による第三下肢保持部からの面圧がかかることとなる。これにより、セットした足裏と第三下肢保持部とが離れることなく適度な弾性反力を持って当接したまま、施療者の下肢を確実に収容保持することが可能となるので、より的確な位置に施療子を調節することが可能となる。
【0024】
(10)本発明の第三の局面の椅子式マッサージ機は、
座部と、
前記座部に着座した施療者の左右のふくらはぎ部分をそれぞれ配置可能な一対の第一凹部を含み、前記座部の前方に回動可能に設けられた第一下肢保持部と、
前記第一下肢保持部に隣接すると共に第一下肢保持部から施療者の足先方向へ分離可能に設けられた第二下肢保持部と、
前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接すると共に前記第二下肢保持部から施療者の足先方向へ分離可能に設けられた第三下肢保持部と、
前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを備え、
前記施療子は、前記一対の第一凹部の各々の両側部にそれぞれ設けられ、施療者のふくらはぎの各側部を施療する一対の第一側部施療子と、前記一対の第一凹部の各々の両底部に設けられ、施療者のふくらはぎの裏部を施療する第一底部施療子と、を含み、
前記第二下肢保持部及び第三下肢保持部は、それぞれ互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能に構成される。
【0025】
このように、第二下肢保持部と第三下肢保持部とのそれぞれを、互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能とすることによって、第二下肢保持部及び第三下肢保持部をそれぞれ任意のスライド移動位置、すなわち、施療者の所望する位置に独立配置することができる。その結果、施療者の所望するマッサージ位置にて、より的確な施療を行うことが可能となる。また、このような構成であれば、第一〜第三下肢保持部によって下肢を三分割位置で確実に保持しながら、第一、第二及び第三下肢保持部による支持、及び、第一、第二及び第三下肢保持部の施療子による施療とは独立して、施療者のふくらはぎの側部及び裏部を確実に施療することができる。
【0026】
(11)また、前記(10)記載の椅子式マッサージ機において、
前記第二下肢保持部は、施療者の両足それぞれの足首からふくらはぎの間の部分を配置可能な一対の第二凹部を含み、
前記施療子は、前記一対の第二凹部の各々の両側部にそれぞれ設けられ、施療者の足首からふくらはぎの間の各側部を施療する一対の第二側部施療子と、前記一対の第二凹部の各々の両底部に設けられ、施療者の足首からふくらはぎの間の裏部を施療する第二底部施療子と、の少なくともいずれかを含むことが好ましい。
【0027】
このように構成すれば、第一凹部によるひざ裏の下部近傍の支持部分の直下にて、各々の脚のふくらはぎから足首の間の部分を、一対の第二凹部内へ収容することとなる。これにより、施療者の脚の下肢の角度を所定のものに保ったまま両下肢を確実に保持することができる。また、前記第一下肢保持部による施療に加えて第二下肢保持部でも施療を行うことにより、第一側部施療子及び第一底部施療子による、下肢を三分割保持した最上部の施療に加え、各々の脚のふくらはぎから足首の間の範囲における裏側、或いは両側部を同時に又は順次に、或いは交互に施療することが可能となり、施療者の各々の下肢を広範囲に分散した位置で、より十分にマッサージすることができる。
【0028】
(12)前記(10)又は(11)記載の椅子式マッサージ機において、
前記一対の第一側部施療子は、それぞれ、気体又は液体が流入又は排出されることにより膨縮可能な側部膨縮袋を含み、
前記第一底部施療子は、気体又は液体が流入又は排出されることにより膨縮可能な底部膨縮袋を含み、
前記側部膨縮袋と前記底部膨縮袋とは、互いに独立して膨縮可能であることが好ましい。
【0029】
このように互いに相関することなく独立して膨縮し得る膨縮袋を側部、底部それぞれに設けることによって、側部の膨縮施療と底部のいずれか又は双方の膨縮施療をそれぞれ独自のタイミングで別個に、或いは任意のタイミングで組み合せて行うことができ、より十分なマッサージ効果を得ることが可能となる。
【0030】
(13)前記(10)(11)又は(12)のいずれか記載の椅子式マッサージ機において、
前記一対の第一側部施療子のそれぞれ又は前記第一底部施療子1は、前記第一凹部を構成する各側面又は底面に対応する位置で上下又は左右方向に並設された複数の側部膨縮袋又は底部膨縮袋を含み、
前記並設された複数の側部膨縮袋又は底部膨縮袋は、それぞれ、互いに独立して膨張収縮可能であることが好ましい。このように凹部の各面に対応する位置で膨縮袋を複数個に分割し並べて配置することによって、各面に対応する位置の上下又は左右のいずれかまた双方の膨縮施療をそれぞれ独自のタイミングで別個に、或いは任意のタイミングで組み合せて行うことができるので、施療のバリエーションを増やすことができる。その結果、より十分なマッサージ効果を得ることが可能となる。
【発明の効果】
【0031】
上記手段を講じることで、足載せ部を第一下肢保持部、第二下肢保持部及び第三下肢保持部に分けて構成し、それぞれで施療者の下肢を支持することによって、施療者の下肢を所定角度及び所定の長さで確実に保持して、下肢保持部が、施療者の所望するマッサージ位置とずれた位置に配置されることを抑制しながら、施療者の所望する各下肢保持部のマッサージ位置にてより的確な施療を行うことができるものとなった。
【図面の簡単な説明】
【0032】
【図1】本発明の第一実施形態の椅子式マッサージ機の斜視外観図。
【図2】図1に示す第一実施形態の椅子式マッサージ機の側面図。
【図3】第一実施形態の椅子式マッサージ機の足載せ部Oの支持機構を示す側面視断面説明図。
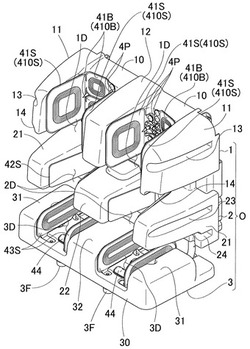
【図4】第一実施形態の椅子式マッサージ機の足載せ部Oのみの斜視外観図。
【図5】第一実施形態の椅子式マッサージ機の足載せ部Oのみの正面図。
【図6】第一実施形態の椅子式マッサージ機の足載せ部Oの支持材の構成を示す正面分解説明図。
【図7】第一実施形態の椅子式マッサージ機の足載せ部Oの支持材の組み構成を示す正面説明図。
【図8】図7の側面図。
【図9】第一実施形態の椅子式マッサージ機の足載せOを収容した状態を示す側面図。
【図10】第一実施形態の椅子式マッサージ機の第一の使用状態例を示す側面説明図。
【図11】第一実施形態の椅子式マッサージ機の第二の使用状態例を示す側面説明図。
【図12】第一実施形態の椅子式マッサージ機の第三の使用状態例を示す側面説明図。
【図13】本発明の第二実施形態の椅子式マッサージ機の足載せOを収容した状態を示す側面図。
【図14】本発明の椅子式マッサージ機における他の膨縮袋構成の実施形態を示す正面説明図。
【図15】第一実施形態の椅子式マッサージ機の第二側部施療子42Sの(a)収縮及び(b)膨出状態を示す斜視部品説明図。
【発明を実施するための形態】
【0033】
以下、本発明を実施するための形態につき、実施例として示す各図と共に説明する。図1〜図12及び図15は本発明の第一実施形態の椅子式マッサージ機を示し、このうち図10〜12は使用状態例を示す。図13は本発明の第二実施形態の椅子式マッサージ機を示し、図14は本発明の椅子式マッサージ機の他の実施形態を示す。
【0034】
(第一実施形態)
図1〜図12及び図15に示す本発明の第一実施形態の椅子式マッサージ機は、座部Bと、前記座部Bの前方に回動可能に設けられた第一下肢保持部1と、前記第一下肢保持部1に隣接するように設けられた第二下肢保持部2と、前記第二下肢保持部2の前記第一下肢保持部1とは反対側に隣接するように設けられた第三下肢保持部3と、前記第一下肢保持部1、前記第二下肢保持部2及び前記第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする施療子4とを含む足載せ部Oとを備える。また、前記足載せ部Oにおいては、第一下肢保持部1を支持し、前記座部Bの前方に回動可能に設けられた第一支持部材61と、前記第二下肢保持部2を支持し、前記第一支持部材61に対して施療者の脚の長手方向にスライド移動可能な第二支持部材62と、前記第三下肢保持部3を支持し、前記第一支持部材61に対して施療者の脚の長手方向にスライド移動可能な第三支持部材63とをさらに備える。以下、各構成につき詳述する。
【0035】
(座部Bの構成)
第一実施形態の座部Bは、下部に収容空間が形成されると共に上面への施療子を内蔵した座B1と、座B1の両側部にて肘収容溝を有して前後延出形成されると共に溝内に施療子を内蔵した肘掛B2と、座B1の背部から角度調節可能に設けられると共に前面への施療子を内蔵した背B3と、を具備して構成される(図1,2)。座B1の下部には、足載せ部Oを回動調節可能に支持する回動機構が収容される(図3)。また、座B1の下部或いは背B3の内部には、駆動制御を行う制御部が内蔵されている。また、第一実施形態の椅子式マッサージ機は、この制御部から有線又は無線電送可能な操作部(図示せず)を有している。施療者(ユーザ)は、操作部を操作することにより、後述する各駆動源を制御し、足載せ部Oの各構成である下肢保持部の位置や、それぞれの下肢保持部の施療子4の施療の有無或いは強弱或いは施療パターンを調節又は設定することができる。
【0036】
(足載せ部O)
ここで、第一実施形態では、上述したように、足載せ部Oは、座部Bの前方に回動可能に設けられた第一下肢保持部1と、前記第一下肢保持部1に隣接するように設けられた第二下肢保持部2と、前記第二下肢保持部2の前記第一下肢保持部1とは反対側に隣接するように設けられた第三下肢保持部3と、前記第一下肢保持部1、前記第二下肢保持部2及び前記第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする施療子4とを含む。足載せ部Oの第二下肢保持部2及び第三下肢保持部3は、それぞれ互いに独立して、前記第一下肢保持部1に対し施療者の脚の長手方向にスライド移動可能に構成されている。
【0037】
ここで、前記座部Bの内部には、図3に示すように、前記第一下肢保持部1を施療者の脚の長手方向へ実質的にスライド移動させることなく座部Bに対して回動をさせるための第一駆動源55を備える。また、第二支持部材62上には、図6に示すように、前記第一駆動源55とは独立して、前記第二下肢保持部2を施療者の脚の長手方向へスライド移動させるための第二駆動源71が設けられている。また、第三支持部材63内には、前記第一駆動源55及び第二駆動源71とは独立して、第三下肢保持部3を施療者の脚の長手方向へスライド移動させるための弾性支持部材65が設けられている。上記第二駆動源71及び弾性支持部材65によって、足載せ部Oの第二下肢保持部2及び第三下肢保持部3は、それぞれ互いに独立して、前記第一下肢保持部1に対し足載せ部Oに配置された施療者の脚の長手方向にスライド移動可能に構成されるものとなっている。
【0038】
(第一下肢保持部1)
第一下肢保持部1は、図4に示すように、前記座部Bに着座した施療者の左右のふくらはぎ部分をそれぞれ配置可能な一対の第一凹部1Dを含み、第一支持部材61(図6参照)に固定されることで、背面側から支持される。そして、この第一支持部材61と座部Bの前方に設けられた座フレームBFとの固定ピン61Pを介した固定構造(図2及び図6参照)によって、第一下肢保持部1が、座部Bの前方に回動可能に設けられると共に、座部Bに対して任意の角度に回動調節可能に支持される。
【0039】
ここで、第一支持部材61は、回動調節可能であると共に施療者の脚の長手方向への移動距離調節機能を有さないものとしている。つまり、第一下肢保持部1が、座部Bに対して回動角度のみの調節が可能な第一支持部材61によって座部Bに回動可能に支持され、この回動支持構造による回動角度の調節時に、脚の長手方向位置の実質的な移動調節を伴うことがない。すなわち、第一支持部材61に固定されている第一下肢保持部1は、施療者の脚の長手方向へ実質的にスライド移動することなく回動するように構成されている。
【0040】
また、第一下肢保持部1は、図4及び図5に示すように、施療者の下肢のうちひざ下の背面に対向する部分を含むベース部10と、ベース部10の左右両側辺部分から前方へ突出成形された一対の側壁11とを具備する。各側壁11は、それぞれ、上辺が側壁11の突出端側に向かって緩やかに下方傾斜すると共に下辺が上辺よりも前方向に僅かに長く(より突出するように)形成されている。さらに、各側壁11のそれぞれの側辺は、側壁11の突出端側へ向かって左右方向の厚みが次第に薄く形成されている。また、側壁11の外側面の上部及び下側面には、それぞれ、内リブ13及び14が側壁11の突出方向に伸びて窪み形成される。これら内リブ13及び14は、施療子4(41S)が膨張した時の側壁11の歪み変形を抑えるものである。
【0041】
また、ベース部10の左右幅方向の略中央位置には、縦長長方形断面の略四角柱からなる中央突壁12が前方に突出するようにベース部10と一体成形されている(図4)。そして、左右の各側壁11と中央突壁12とにそれぞれ挟まれて前方(ベース部10の板前面側)に開放され、施療者の両脚それぞれのひざの下部からふくらはぎの間の部分を配置可能な一対の第一凹部1Dが第一下肢保持部1に形成される。また、それぞれの第一凹部1Dの各側面及び底面には施療子4(41S、41B)が配される。
【0042】
(第二下肢保持部2)
第二下肢保持部2は、第一下肢保持部1に隣接すると共に第一下肢保持部1から足載せ部Oに配置された施療者の脚の足先方向へ分離可能に設けられる。具体的には、第二下肢保持部2は、図4及び図5に示すように、前方を板状面とした正面視略横長矩形を有するベース部20(図5参照)と、ベース部20の左右両側部分から前方へ突出成形された一対の側壁21とを具備する。また、ベース部20の左右幅方向の略中央位置には、横長長方形断面の略四角柱からなる中央突壁22が前方に突出するようにベース部20と一体成形されている(図4参照)。そして、左右の各側壁21と中央突壁22とにそれぞれ挟まれて前方(ベース部20の板前面側)に開放され、施療者の両脚それぞれのふくらはぎから足首までの間の範囲の一部分を配置可能な一対の第二凹部2Dが第二下肢保持部2に形成される。そして、この第二凹部2Dの各側面には施療子4(42S)が配される。
【0043】
ベース部20は、施療者の下肢の背面に対向するように配置されており、背部が第二支持部材62(図6参照)にビス固定されて支持される。また、各側壁21は、ベース部20の側辺から前方へ突出成形された略台形柱状体からなり、後端付近の下辺から下方へ箱状の下方突出部が一体的に突出成形される。また、側壁21の略台形柱状部分及び下方突出部の各外側面には、内リブ23及び24が前後方向に伸びて窪み形成される。これら内リブ23及び24は、後述する施療子4(42S)が膨張した時の側壁21の歪み変形を抑えるものである。また、図5に示すように、ベース部20の上部には、背部のフレーム(第一支持部材61及び第二支持部材62(図6参照))の側面ないし前面を覆うカバー2Cがベース部20と一体的に上方突出形成される。カバー2Cの幅方向中央部は、突壁12,22の形状と共に前方に枠状に突出形成してなる。また、カバー2Cは、第二下肢保持部2が第一下肢保持部1側にスライド移動した場合に、第一下肢保持部1の裏面側に隠れるように構成されている。
【0044】
(第三下肢保持部3)
第三下肢保持部3は、第二下肢保持部2の前記第一下肢保持部1とは反対側に隣接すると共に第二下肢保持部2から施療者の足先方向へ分離可能に設けられる。具体的には、第三下肢保持部3は、第二下肢保持部2側を板状面とした正面視略横長矩形からなるベース部30と、ベース部30の左右両側部分から上方(第二下肢保持部2に向かう方向)へ突出成形された左右一対の側壁とを具備する。また、ベース部30の左右幅方向の略中央位置には、ベース部30の左右幅方向の略中央位置から上方(第二下肢保持部2側方向)に突出するように略台形柱状の中央突壁32がベース部30と一体成形されている(図4)。左右の各側壁と中央突壁32とにそれぞれ挟まれて上方(第二下肢保持部2に向かう方向)に開放され、施療者の両足それぞれの足裏を当接させて足部分全体を配置可能な一対の第三凹部3Dが形成される。そして、この第三凹部3Dの各側面及び底面には、施療子4(43S、43B)が配される。
【0045】
具体的には、ベース部30は、施療者が足載せ部Oに脚及び足を配置した際の足裏面に対向するように設けられ、前記第一下肢保持部1、第二下肢保持部2の各ベース部10及び20のうち広い表面が延びる方向とは略直交方向に広い表面が延びるように配置される。側壁は、ベース部30の左右側部から、第二下肢保持部2側に向かってベース部30と一体的に突出形成される。各側壁の後端(第三下肢保持部3に配置される足のかかとに対応する位置側)付近の上隅部は、側面視略L字状に切り欠き成形されている。この切り欠き成形部分の形状は、第二下肢保持部2の下方突出部に対応しており、第三下肢保持部3と第二下肢保持部2とが最接近した状態では、各側壁21,同士が上下接触すると共に切り欠き成形部と下方突出部とが組みあって一体的な下肢下半部の保持構造を構成する(図9)。また、足裏を当接させる板状のベース部30の裏面には、弾性材からなる接地脚3Fが左右一対に固定され、ベース部30の後端側には、接地転動し得るローラー3Rが左右一対に設けられる。
【0046】
また、第三下肢保持部3は、施療者の足裏を当接させて足を収容する左右一対の第三凹部(足収容部)3Dを有し、第三支持部材63によって第一支持部材61からスライド移動可能に支持される。さらに、第一実施形態による椅子式マッサージ機は、第二下肢保持部2と第三下肢保持部3との間に、第三下肢保持部3を弾性支持する弾性支持部材65を備える。
【0047】
また、第三下肢保持部3は、前記第一下肢保持部1及び前記第二下肢保持部2の移動又は回動動作とは独立した弾性支持機構によって、施療者の脚の長手方向へスライド移動するように構成されている。前記足載せ部Oに施療者の下肢をセットし、足収容部3Dに施療者の足を収容することにより、施療者の足により足収容部3Dが押圧される。これにより、前記第三下肢保持部3がスライド移動し、この第三下肢保持部3のスライド移動に伴って前記弾性支持部材65が伸長し、この弾性支持機構は、施療者の下肢の長さに合わせた脚の長手方向位置で第三下肢保持部3を弾性支持するものとしている。このように、弾性支持部材65によって第三下肢保持部3は弾性支持されており、施療者の足を第三下肢保持部3内へセットすることにより、第三下肢保持部3の弾性支持位置が弾性反力によって可変し、このとき足収容部3D内に収容した施療者の足裏に、弾性反力による第三下肢保持部3からの面圧がかかることとなる。これにより、セットした足裏と第三下肢保持部3とが離れることなく適度な弾性反力を持って当接したまま、施療者の下肢を確実に収容保持することとなる。
【0048】
(奥行き方向及び上下方向の長さの関係)
また、第一実施形態では、図9に示すように、第一下肢保持部1の奥行き方向(前後方向)の最大長さ1Lが、第二下肢保持部2の奥行き方向(前後方向)の最大長さ2L、第三下肢保持部3の奥行き方向(前後方向)の最大長さ3Lのいずれよりも小さい。また、第二下肢保持部2の奥行き方向(前後方向)の最大長さ2Lが、第三下肢保持部3の奥行き方向(前後方向)の最大長さ3Lよりも小さいものとしている。第一下肢保持部1の奥行き方向の最大長さ1Lを最も短く構成し、その内部に一対形成した第一凹部1Dの各側面に第一側部施療子41Sを配置することにより、ひざ下の筋肉ないし健の施療部分を大きく外れることなく、確実に施療することができる。また、第二下肢保持部2の奥行き方向の最大長さ2Lを第一下肢保持部1の奥行き方向の最大長さ2Lよりも長く構成し、その内部に一対形成した第二凹部2Dの各側面に第二側部施療子42Sを配置することにより、第二側部施療子42Sがふくらはぎから足首までの側部のいずれかの部分(第二下肢保持部2の可動範囲内に対応する下肢の部分)を前後方向に広く覆うように配されることとなる。また、第一実施形態では、第一下肢保持部1の上下方向(載置される脚の長手方向)の長さは、第二下肢保持部2の上下方向の長さよりも大きい。また、第一下肢保持部1の上下方向(載置される脚の長手方向)の長さは、第三下肢保持部3の上下方向の長さよりも大きい。つまり、第一下肢保持部1は、施療者のひざ下部分からふくらはぎを十分に保持する事が可能な上下方向(載置される脚の長手方向)の長さを有している。これにより、施療者のふくらはぎを第一下肢保持部1に設けられている施療子4(第一側部施療子41Sないし第一底部施療子41B)により十分に施療することができる。
【0049】
(フレーム構成)
第一実施形態のフレーム構成は、上述したように、第一下肢保持部1を支持する第一支持部材61が、角度可変可能、かつ離間・近接方向への実質的な移動ができないように、固定ピン61Pによって回転可能に座部Bの前方に軸支されてなる(図8参照)。また、第二下肢保持部2を支持する第二支持部材62が、第一支持部材61及び第三支持部材63の動作とは独立した、施療者の脚の長手方向へのスライド移動可能な構造をもって第一支持部材61の上側に支持される。また、第三下肢保持部3を支持する第三支持部材63が、第一支持部材61及び第二支持部材62の動作とは独立した、施療者の脚の長手方向へのスライド移動可能な構造をもって、第二支持部材62の上側に支持される。
【0050】
第一実施形態による第二支持部材62の第一支持部材61に対するスライド移動は、図7に示すように、第二支持部材62に固定した第二駆動源71によって駆動制御され、第三支持部材63の第二支持部材62に対するスライド移動は、第三支持部材63内に収容されて第二支持部材62と繋がれたコイルばね状の弾性支持部材65により、差し込んだ施療者の足の位置に応じて自由に弾性制御される。これにより、上述したように、弾性支持部材65によって第三支持部材63に固定されている第三下肢保持部3は弾性支持されている。
【0051】
(他のスライド移動制御例)
上記のように第一実施形態では、第二支持部材62をそれ自体に設けた第二駆動源71によって任意の駆動位置に調整されるものとし、第三支持部材63をそれ自体に設けた弾性支持部材65によって任意の弾性支持位置に弾性支持される形態を示したが、本発明はこれに限られない。本発明では、たとえば、他のスライド移動制御例として、第二支持部材62をそれ自体に設けた弾性支持部材によって任意の弾性支持位置に弾性支持されるものとし、第三支持部材63をそれ自体に設けた駆動源によって任意の駆動位置に調整されるものとしてもよい。また、弾性支持部材、駆動源それぞれの設置位置は各支持部材それ自体でなくてもよく、例えば、第二支持部材62を支持する弾性支持部材又は駆動源(第二駆動源71)を第一支持部材61或いは座部B内に備えてもよく、第三支持部材63を支持する弾性支持部材又は駆動源を第一支持部材61、第二支持部材62或いは座部B内に備えてもよい。
【0052】
(第二駆動源71)
第二駆動源71は、第二支持部材62を第一支持部材61に対して施療者の脚の長手方向にスライド移動させるように構成する。ここで、第二駆動源71によるスライド移動は、他の支持部材である第一支持部材61ないし第三支持部材63の回動ないし移動動作とは独立して行われる。より具体的には、第二駆動源71は、前記第一下肢保持部1の回動動作のための第一駆動源55及び前記第三下肢保持部3の移動動作のため弾性支持部材65と相関することのない独立した第二駆動源71をもって、前記第二下肢保持部2を、第一下肢保持部1と前記第三下肢保持部3との間の移動可能範囲内で、施療者の脚の長手方向(第一下肢保持部1と離れたり近づいたりする方向)にスライド移動させる。
【0053】
(施療子4)
施療子4は、図4及び図5に示すように、第一下肢保持部1、前記第二下肢保持部2及び前記第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする。施療子4は、前記一対の第一凹部1Dの各々の両側部にそれぞれ設けられ、施療者のふくらはぎの各側部を施療する一対の第一側部施療子41Sと、前記一対の第一凹部1Dの各々の両底部に設けられ、施療者のふくらはぎの裏部を施療する第一底部施療子41Bとを含む。これにより、第一〜第三下肢保持部1〜3によって下肢を三分割位置で確実に保持しながら、第二下肢保持部2及び第三下肢保持部3による支持及び施療とは独立して、施療者のひざ下近傍、ふくらはぎの側部及び裏部を確実に施療することができる。
【0054】
また、第一実施形態では、前記一対の第一側部施療子41Sは、それぞれ、空気が流入又は排出されることにより膨縮可能な第一側部膨縮袋410Sである。また、前記第一底部施療子41Bは、空気が流入又は排出されることにより膨縮可能な第一底部膨縮袋410Bである。具体的には、一対の第一側部施療子41S及び第一底部施療子41Bは、それぞれ、空気膨縮袋たるエアバッグで構成されており、エアーの給排気機構(図示せず)によって、それぞれ互いに独立して膨張収縮可能としている。すなわち、これら第一側部膨縮袋410Sと第一底部膨縮袋410Bとは、互いに独立して膨縮可能である。また、第一実施形態では、前記第一底部施療子41Bは、前記第一凹部1Dを構成する底面に対応する位置で上下方向に並設された複数(2つ)の第一底部膨縮袋410Bである。そして、これら並設された複数の第一底部膨縮袋410Bは、それぞれ、互いに独立して膨張収縮可能である。つまり、第一側部膨縮袋410S及び上下一対の第一底部膨縮袋410Bは、それぞれ、互いに独立して膨張収縮可能である。また、第一底部膨縮袋410Bは、それぞれ、左右一対形成された第一凹部1Dのそれぞれの底部に取り付けるための取り付け端部が側方へ張り出し形成されており、この取り付け端部が第一下肢保持部1の幅方向の内側(中央突壁12)寄りの位置にて、差し込みピン4Pによって回動可能に固定される。
【0055】
また、施療子4は、前記一対の第二凹部2Dの各々の両側部にそれぞれ設けられ、施療者の足首からふくらはぎの間の各側部を施療する一対の第二側部施療子42Sを含む。また、一対の第二側部施療子42Sは、空気が流入又は排出されることにより膨張収縮可能な第二側部膨縮袋420Sである。
【0056】
また、施療子4は、前記一対の第三凹部3Dの各々の両側部にそれぞれ設けられ、施療者の足の甲近傍を施療する一対の第三側部施療子43Sと、前記一対の第三凹部3Dの各々の両底部に設けられ、施療者の足裏部を施療する第三底部施療子44を含む。一対の第三側部施療子43Sは、空気が流入又は排出されることにより膨張収縮可能な第三側部膨縮袋430Sである。また、第三底部施療子44は、球冠状の突起体によって構成している(図4、図5参照)。また、前記第三底部施療子44は、前記第三凹部3Dを構成する底面下に設けられた第三底部膨縮袋430Bが膨張収縮することにより、膨張収縮するストローク分上下方向に移動する。そして、これら並設された第三側部膨縮袋430Sと第三底部膨縮袋430Bとは、それぞれ、互いに独立して膨張収縮可能とすることができる。
【0057】
ここで、第二側部膨縮袋420Sは、他の残りの施療子よりも柔らかい織布構成材で構成され、ふくらはぎから足首までの範囲を比較的やわらかく包み込むように施療することができる。具体的には、第一側部膨縮袋410S、第一底部膨縮袋410B、第三側部膨縮袋430S、第三底部膨縮袋430Bのそれぞれを、空気の流出入の迅速性に優れたブロー成型材で構成し、第二側部膨縮袋420Sのみを、織布構成材を主材とした溶着成形材で構成している。この溶着成形材で構成した第二側部膨縮袋420Sは、図15(a)及び(b)に示すように、膨出状態で円柱状に立体的に膨らみ、施療者の足の側部を前後にわたって包み込むことができる。
【0058】
(第一下肢保持部1の支持構成)
第一下肢保持部1は、図2に示すように、座B1の前方にて、座B1の前方に設けられた支持軸たる固定ピン61P周りに回動可能に支持される。この固定ピン61Pは、座部Bの前方へ突出した座フレームBFを略水平に貫通してなり、第一下肢保持部1を支持する左右一対の第一支持部61の各上端付近を、座フレームBFの固定軸周りに軸支する(図2)。この軸支によって、施療者の脚の長手方向への実質的なスライド移動を伴うことなく第一下肢保持部1を回動させることが可能である。なお、施療者の脚の長手方向への実質的なスライド移動を伴うものでなければ、第一下肢保持部61の回動の際に多少の回動軸のズレを伴うものであってもよい。例えば、両端付近に2軸連結されたアームを介した移動軸構造によって第一支持部材61を連結支持したものであったり、多少のアソビを有する摺動軸受を介して軸位置の多少のずれを伴う構造によって第一支持部材61を連結支持したものであったりしてもよい。
【0059】
また、図3に示すように、座部Bは座B1の下部に収容空間を有しており、第一支持部材61の回動角度は、この収容空間内に設けられた伸縮アームによって駆動制御される。具体的には、座B1の収容空間には、第一駆動源55であるモーターの駆動によって前方へ伸縮する伸縮アームが左右一対に設けられ、伸縮アームの先端が座B1より前方へ突出入可能となっている。
【0060】
(伸縮アーム)
具体的には、伸縮アームは、収容空間内にて前方へ向かって上方傾斜するように配置された第一アーム51と、第一アーム51の伸長方向に沿って前後にスライド移動可能な第二アーム52と、第二アーム52の先端部に一端が軸支されると共にこの軸支位置よりも上方の支持軸53Aにて他端が軸支された第三アーム53と、第三アーム53の先端部に自由回転可能に設けられ、第一下肢保持部1(第一支持部材61)の背面に設けられたローラー受け部61A上を転動するローラー54Rとから構成される。
【0061】
第一アーム51は、第二アーム52を枠持するためのスライド枠を有して伸長する棒状の固定配置材であり、第一アーム51の先部近傍には、第二アーム52を伸縮駆動させる第一駆動源55たるモーター、及び、第二アーム52の伸縮を検知するセンサ5Sが固定される。
【0062】
第二アーム52は、第一アーム51のスライド枠によって、アームの伸縮方向へスライド移動可能に枠持される。また、第二アーム52には、移動量検知用の多数の小孔52Hが伸長方向に沿って側面に連続形成されたセンシング枠52Aが第二アーム52の上辺に沿って固定されている。このセンシング枠52Aは、第二アーム52のアーム伸縮方向へのスライド移動に伴って第二アーム52と共に移動する。このとき、センサ5Sの検知部が、移動するセンシング枠52Aの小孔52Hを跨いで相対移動する形となり、かかる相対移動によって小孔52Hの通過を検出する。この小孔52Hのセンサ5Sへの通過に基づいて移動量を認識し、足載せ部O(厳密には第一支持部61)の回動を制御することが可能となる(図3参照)。
【0063】
(フレーム構造のより詳細な構造)
(第一フレーム構造)
第一実施形態では、図6及び図7に示すように、第一下肢保持部1を支持する第一フレーム構造が、板金により形成された第一支持部材61と、第一支持部材61の中央位置及び下端位置にて左右方向に延びる中空棒状(図8参照)の中央連結フレーム6F、及び中空棒状(図8参照)の下部連結フレーム60Fとによって構成される。第一支持部材61は、左右方向の中央部分の第一プレート部60Aと、第一プレート部60Aの左右の両端側に曲げ加工により段差形成された側部60Bとにより構成されている。この第一支持部材61の側部60Bを接続する中央連結フレーム6F、下部連結フレーム60F及び第一プレート部60Aによって、第一フレーム構造の捩じれ変形を抑制している。また、側部60Bは、第一プレート部60Aよりも前方(上述した側壁11の先端側)に向かって突出した位置に位置するように段差形成されている。これにより、第一プレート部60Aと第一下肢保持部1の裏面側との間に空間を設けることができるので、第一プレート部60Aと第一下肢保持部1の裏面側との間の空間に部材などを配置することが可能となる。
【0064】
第一フレーム構造において、図6に示すように、第一プレート部60上の左右近傍位置には、それぞれ、第二支持部材62及び第三支持部材63を保持摺動するための複数の転動ローラー73が自由転動可能に枠保持される。転動ローラー73は、第一プレート部60の上方において並行に支持された2軸それぞれの内側と外側に2輪ずつ、計4輪が枠保持される。このうち内側の2輪の転動ローラー73と第一プレート部60との間に第二支持部材62を挟み込むように設けて、この第二支持部材62を、施療者の脚の長手方向へスライド可能に支持する。また、外側の転動ローラーの2輪の転動ローラー73と第一プレート部60との間に第三支持部材63を挟み込むように設けて、この第三支持部材63を、施療者の脚の長手方向へスライド可能に支持する(図6、図8参照)。
【0065】
また、中央連結フレーム6Fの裏面側には、プレート状のローラー受け部61Aが固設される。このローラー受け部61Aは、背面側に、前記伸縮アームのローラー54Rが転動するための平坦面を有ししており、伸縮アームが伸縮したとき、伸縮アーム先端のローラー54R(図3参照)がこの平坦面上を転動するものとなっている。
【0066】
第一支持部材61は、各側部60Bの上部が、座B1の左右下部に一対設けられた断面コ字状の座フレームBF内に嵌み込まれ、座フレームBF及び第一支持部材61の各側部60Bを共挿通する固定ピン61Pによって座フレームBFに対して回動可能に支持される。また、第一支持部材61の各側部60Bには、それぞれ、複数の固定孔61Hが設けられ、これら固定孔61Hにて、第一下肢保持部1が、第一支持部材61にネジ止め固定される。
【0067】
(第二フレーム構造)
また、第一実施形態では、図6に示すように、第二下肢保持部2を支持する第二フレーム構造は、並行配置された左右一対の中空丸棒状の第二支持部材62と、第二支持部材62の基端位置及び先端位置にて左右の第二支持部材62間を亘る細板状の上下一対の連結フレーム7Fとによって四方枠状に組み枠構成される。平面視上下の連結フレーム7F間であって幅方向略中央位置には、第二支持部材62間距離よりも小幅の板状の第二プレート70が設けられている。この第二プレート70上には、第二支持部材62を第一支持部材61に対して駆動させる第二駆動源71及び駆動構造の一部が固定される(図6、図7)。各第二支持部材62及び下の連結フレーム7Fには、複数の固定孔62Hが設けられ、これら固定孔62Hにて、第二下肢保持部2が、左右の第二支持部材62を跨ぐ態様で第二支持部材62の表面側にネジ止め固定される。
【0068】
(駆動構造)
第二フレーム構造の第二プレート70上には、第二駆動源71たるモーターと、この第二駆動源71によって第二フレーム構造(第二支持部材62)自体を第一フレーム構造(第一支持部材61)に対して施療者の脚の長手方向にスライド駆動させる駆動構造とが設けられる。第二駆動源71たるモーターは、第二プレート70の法線方向を向くウォーム軸71Wを駆動回転させるものであり、駆動構造の一部であって、前記ウォーム軸71Wと直角噛合したウォーム歯車7Nを回転させる。
【0069】
駆動構造は、第二フレーム構造(第二支持部材62)のスライド移動方向に伸長して軸回転可能に設けられた駆動ネジ7Sと、第一フレーム構造の連結フレーム6F内に内ネジを有して貫通形成された駆動孔66とからなり、前記駆動孔66内を前記駆動ネジ7Sが螺合して構成される。駆動ネジ7Sは、第二プレート70のプレート面と並行し、その伸長軸周りには雄ネジが形成されると共に、その先部には、周方向へ張り出す円盤歯車状のウォーム歯車7Nが同軸形成される。ウォーム歯車7Nは、駆動ネジ7Sの先部にて駆動ネジ7Sと共に同軸回転する。このウォーム歯車7Nは、第二駆動源71の先に設けられたウォーム軸71Wと噛合しており、第二駆動源71から伝達された駆動回転力は、ウォーム軸71Wからウォーム歯車7Nへ伝達され、駆動ネジ7Sの回転力に変換される。これにより、駆動孔66が駆動ネジ7Sに対して相対的に移動され、駆動ネジ7Sが取り付けられている第二フレーム構造(第二支持部材62)が駆動孔66が設けられている第一フレーム構造(第一支持部材61)に対してスライド移動することが可能となる。
【0070】
(検知器74)
また、第一フレーム構造の下部連結フレーム60F上には、第二フレーム構造(第二支持部材62)の第一フレーム構造(第一支持部材61)に対する相対位置を検知する検知器74が固定される。第一フレーム構造(第一支持部材61)に支持された第二フレーム構造(第二支持部材62)が施療者の脚の長手方向へスライド移動したとき、第二プレート70に設けられ、多数の小孔72Hが連続形成されたセンシング枠72が検知器74上をスライド移動することで、検知器74はその上を跨ぐ小孔72Hの通過を検出する。小孔72Hの通過に基づいて、第二フレーム構造(第二支持部材62)との相対移動量を認識し、これによって第一フレーム構造(第一支持部材61)に対する第二フレーム構造(第二支持部材62)の伸長量を制御することが可能となる(図5、図7)。
【0071】
(第三フレーム構造)
また、第一実施形態による第三下肢保持部3を支持する第三フレーム構造は、図8に示すように、側面視略L字状に屈曲成形され、略L字状の上端が上方を向き且つ屈曲先部が前方を向くように並行配置された左右一対の棒状の第三支持部材63(図8)と、第三支持部材63の前記前方を向いた先端位置にて左右の第三支持部材63間を亘る細板状の連結フレーム64とによって三方枠状に組み枠構成される(図6)。これら第三支持部材63と連結フレーム64とは、一体的に形成されている。また、連結フレーム64には、複数の固定孔64Hが設けられ、これら固定孔64Hにて、第三下肢保持部3が、左右の第三支持部材63を跨ぐ態様で連結フレーム64の上面側にネジ止め固定される。また、略L字状の左右それぞれの第三支持部材63において、屈曲部よりも上部から上端の直線状の伸長部内には、コイルばねからなる弾性支持部材65がその伸長方向に沿って収容される。弾性支持部材65の下端は、フック状に成形され、第三支持部材63の屈曲部付近を挿通する固定ピン63Pによって固定される。一方、弾性支持部材65の上端もまたフック状に成形され、第二支持部材62の上端を繋ぐ連結フレーム7Fの左右両端近傍に設けた固定孔70H内に掛止固定される(図6、図7、図8)。これにより、第三フレーム構造は左右それぞれに収容した弾性支持部材65によって、第二フレーム構造に弾性支持される。
【0072】
(使用方法例)
上述した第一実施形態の椅子式マッサージ機は、例えば、図10に示す第一の使用状態、例えば図11に示す第二の使用状態、図12に示す第三の使用状態のいずれかに示す使用方法によって使用することができる。特に、第一実施形態では、第一下肢保持部1によってひざ下近傍からふくらはぎ上半部に到る比較的広い範囲の部分を、ふくらはぎ上半部用に配置された第一膨縮袋(410S,410B)によって他の膨縮袋とは独立して集中施療することが可能である。また、第一実施形態では、第三下肢保持部3内の足の甲用に配置された第三側部膨縮袋430Sによって、足の甲の両側を覆うようにして押圧保持又は指圧刺激しながら足裏に当接した足裏施療子44を底部第三膨縮袋430Bの膨縮によって断続又は連続刺激し、他の下肢保持部の膨縮袋とは独立して集中施療することが可能である。
【0073】
しかして第一実施形態では、第二下肢保持部2内の足のふくらはぎ下半部ないしくるぶし用に配置された第二側部膨縮袋420Sによって、足の両側を覆うようにして押圧保持又は指圧刺激しながら移動施療し、他の下肢保持部の膨縮袋と併せて(同時に又は時間をずらして順次)独立して集中施療することが可能である。
【0074】
(第一の使用状態)
図10に示す第一の使用状態は、先ず、第一下肢保持部1と第二下肢保持部2を最上端の収納位置に配置したまま、第一凹部1D、第二凹部2D、第三凹部3Dへ下肢を収容し、ひざ裏を第一下肢保持部1の上端に合わせることで、弾性支持部材65に支持された第三支持部材63のスライド移動によって、第三下肢保持部3のみを脚の長手方向先方(足先方向)へスライド移動させ、施療者の下肢を、任意の回動角度(約45度)かつその回動角度における脚の長さに合わせた適切な長さへの調節を終えた状態でセットする(図10a)。このとき、第一下肢保持部1下端と第三下肢保持部3上端の脚の長手方向距離はその状態の施療者の下肢に適切な第一下肢長L1にセットされる。このセット動作(図10a)では第一下肢保持部1及び第二下肢保持部2が静止状態S1のまま、第三下肢保持部3のみが長手方向足先方向(第一下肢保持部1とは反対側方向)へスライド移動する移動状態S2となる。
【0075】
次に、このセットした状態のまま、第二駆動源71によって第二下肢保持部2のみを脚の長手方向に沿ってスライド移動させ、これと共に、各下肢保持部に設けられた施療子4によって下肢の各位置への施療を行う(図10b)。このとき、第一下肢保持部1下端と第三下肢保持部3上端の脚の長手方向距離はその状態の施療者の脚の長さに適切な第一下肢長L1にセットされたままであり、第二下肢保持部2は、この第一下肢長L1の範囲内でのみスライド移動する。ここで、第二下肢保持部2の第二凹部2D内の各面に対応するように設けられた第二側部施療子42Sたる左右の第二側部膨縮袋420Sは、図示しない空気供給機構によって袋内に空気が充填された膨張状態となり、この膨張状態のままスライド移動する。このスライド移動によって、施療者のふくらはぎ及び足首の側面を押圧刺激しながら擦動する、いわゆる擦り施療を行ったり、或いは施療者のふくらはぎの側面を強く押圧固定しながら押動させ或いは引動させる、いわゆる伸縮施療を行ったりすることができる。
【0076】
(第二の使用状態)
図11に示す第二の使用状態は、先ず、第一下肢保持部1のみを最上端の収納位置に配置したまま、第一凹部1D、第二凹部2D、第三凹部3Dへ下肢を収容し、ふくらはぎを第一下肢保持部1の上端に合わせることで、第一支持部材61に対してスライド可能に支持された第二支持部材62のスライド移動によって、第二下肢保持部2及び第三下肢保持部3を、互いの距離を最短にした収納状態のまま脚の長手方向先方(足先方向)の途中位置までスライド移動させ、施療者の下肢のうち略下半部を、任意の回動角度(たとえば、約45度)かつその回動角度における脚の長さよりも短い長さとして調節を終えた状態でセットする(図11a)。このとき、第一下肢保持部1下端と第二下肢保持部2上端の下肢上半部の長手方向距離はその状態の施療者のひざが、第一下肢保持部1よりも上方へ浮いた第二上半下肢長L21にセットされる。このセット動作(図11a)では、第一下肢保持部1が静止状態のまま、第二下肢保持部2及び第三下肢保持部3が共に同移動量だけスライド移動する移動状態S2となる。
【0077】
次に、このセットした状態のまま、弾性支持部材65によって、第三下肢保持部3のみを脚の長手方向に沿ってスライド移動させ、これと共に、各下肢保持部に設けられた施療子4によって下肢の各位置への施療を行う(図11b)。このとき、第一下肢保持部1下端と第二下肢保持部2上端と間の脚の長手方向距離は、その状態の施療者の下肢に適切な第二上半下肢長L21にセットされたままであり、第三下肢保持部3は、この第二上半下肢長L21よりも先の第二下半下肢領域L22でのみ足載せ部Oに配置された脚の長手方向にスライド移動する。ここで、第一下肢保持部1の第一凹部1D内の各面に設けられた第一側部施療子41Sたる左右の第一側部膨縮袋410S、及び第一底部施療子41Bたる第一底部膨縮袋410B、並びに/或いは、第二下肢保持部2の第二凹部2D内の各面に設けられた第二側部施療子42Sたる左右の第二側部膨縮袋420Sは、それぞれ、図示しない流体供給機構によって袋内に空気が充填された膨張状態となり、かつ、第三下肢保持部3の両側部に設けられた第三側部施療子43Sたる第三側部膨縮袋430Sが膨張状態となったまま、第三下肢保持部3のみが脚の長手方向に沿ってスライド移動する。このスライド移動によって、施療者のふくらはぎの側面を押圧刺激しながら足先を押動させ或いは引動させることで、いわゆる脚全体の伸長方向に対する伸縮施療やふくらはぎへの擦動による擦り施療を行ったりすることができる。
【0078】
(第三の使用状態)
図12に示す第三の使用状態は、先ず、第一下肢保持部1のみを最上端の収納位置に配置したまま、第一凹部1D、第二凹部2D、第三凹部3Dへ下肢を収容し、ひざ裏を第一下肢保持部1の上端に合わせることで、第一支持部材61に対してスライド可能に支持された第二支持部材62のスライド移動によって、第二下肢保持部2及び第三下肢保持部3を、互いの距離を最短にした収納状態のまま脚の長手方向先方(足先方向)へスライド移動させ、施療者の下肢を、任意の回動角度(たとえば、約45度)かつその回動角度における下肢の長さにあった長さとして調節を終えた状態でセットする(図12a)。このとき、第一下肢保持部1下端と第三下肢保持部3上端の脚の長手方向距離はその状態の施療者の下肢に適切な第一下肢長L1にセットされ、かつ、第一下肢保持部1下端と第二下肢保持部2上端の下肢上半部の長手方向距離はその状態の施療者の下肢が収容された第二上半下肢長L21’にセットされる。このセット動作(図12a)では第一下肢保持部1が静止状態のまま、第二下肢保持部2及び第三下肢保持部3が共に同移動量だけ長手方向足先方向(第一下肢保持部1とは反対側方向)へスライド移動する移動状態S2となる。
【0079】
次に、このセットした状態のまま、第二駆動源71によって、第二下肢保持部2のみを脚の長手方向に沿ってスライド移動させ、これと共に、各下肢保持部に設けられた施療子4によって下肢の各位置への施療を行う(図12b)。このとき、第一下肢保持部1下端と第三下肢保持部3上端の脚の長手方向距離はその状態の施療者の脚の長さに適切な第一下肢長L1にセットされたままであり、第二下肢保持部2はこの第一下肢長L1の範囲内でのみスライド移動する。ここで、第二下肢保持部2の第二凹部2D内の各面に設けられた第二側部施療子42Sたる左右の第二側部膨縮袋420Sは、図示しない流体供給機構によって袋内に空気が充填された膨張状態となり、この膨張状態のままスライド移動する。このスライド移動によって、施療者のふくらはぎ及び足首の側面を押圧刺激しながら擦動する、いわゆる擦り施療を行ったり、或いは施療者のふくらはぎの側面を強く押圧固定しながら押動させ或いは引動させる、いわゆる伸縮施療を行ったりすることができる。この施療動作(図12b)では、第一下肢保持部1及び第三下肢保持部3が静止状態S1のまま、第二下肢保持部2のみがスライド移動する移動状態S2となる。このとき、第三支持部材63を支持する弾性支持部材65の弾性反力によって、第二下肢保持部2の施療位置に応じた足裏への第三下肢保持部3の当接力が調整される。なお、別の施療動作として、第二下肢保持部2のみがスライド移動したとき、第三支持部材63を支持する弾性支持部材65の弾性反力によって、第三下肢保持部3の位置が僅かに足載せ部Oに配置された脚の長手方向に向かってスライド移動してもよい。
【0080】
上記のように、第一実施形態では、第二下肢保持部2は、第二駆動源71を駆動させることにより、施療者の所望する位置に移動することが可能なように構成されている。また、第三下肢保持部3は、弾性支持部材65を伸縮させることにより、施療者の所望する位置に移動することが可能なように構成されている。たとえば、施療者の脚の長さが大きく、第一下肢保持部1ではふくらはぎの下部が十分に保持することができない場合には、第二下肢保持部2を第一下肢保持部1側にスライド移動させることにより、ふくらはぎの下部も第二下肢保持部2の施療子4により十分にマッサージすることが可能である。また、ふくらはぎの下部をマッサージするよりも、足首近傍を十分にマッサージしたい場合には、第二下肢保持部2を第三下肢保持部3側にスライド移動させることにより、 足首近傍も第二下肢保持部2の施療子4により十分にマッサージすることが可能である。
【0081】
(第一実施形態の作用効果)
以下、上述の第一実施形態の構成における作用効果を説明する。
第一実施形態の椅子式マッサージ機においては、第二下肢保持部2が第一下肢保持部1に対して施療者の脚の長手方向にスライド移動可能な構成を有し、かつ、第三下肢保持部3もまた第一下肢保持部1に対して施療者の脚の長手方向にスライド移動可能な構成を有している。そして、第二下肢保持部2と第三下肢保持部3とは、それぞれ、互いに独立してスライド移動可能となっている。このように、第二下肢保持部2と第三下肢保持部3のそれぞれを、必ずしも連動せず別個にスライド移動可能とすることで、3つの脚保持部材をそれぞれ任意のスライド移動位置、すなわち、施療者の所望する位置に独立配置することが可能となっている。その結果、第二下肢保持部2及び第三下肢保持部3に配置されている施療子4により、施療者の所望する位置を十分にマッサージすることができる。
【0082】
また、第一実施形態では、上記のように、前記第一下肢保持部1及び前記第三下肢保持部3とは独立して、前記第二下肢保持部2を施療者の脚の長手方向へスライド移動させるための第二駆動源71を設けることによって、第三下肢保持部3を所定のスライド位置に配置し、第一下肢保持部1及び第三下肢保持部3のスライド位置を、施療者の下肢長に適した距離を開けて固定したセット状態のまま、第二駆動源71を駆動することにより、第二下肢保持部2のみを施療者の脚の長手方向へスライド移動させることができる(図10参照)。これにより、第一下肢保持部1、第三下肢保持部3のそれぞれによる施療マッサージを行いながら、さらにその間の範囲内の任意の位置で第二下肢保持部2による施療マッサージを行うことが可能となっている。
【0083】
また、第一実施形態では、上記のように、椅子式マッサージ機は、前記第一下肢保持部1を支持し、前記座部Bの前方に回動可能に設けられた第一支持部材61と、前記第二下肢保持部2を支持し、前記第一支持部材61に対して施療者の脚の長手方向にスライド移動可能な第二支持部材62とを備え、前記第二駆動源71は、前記第二支持部材62を前記第一支持部材61に対して施療者の脚の長手方向にスライド移動させるように構成するものとなっている。これにより、図6に示すように、第一支持部材61と、第一支持部材61に対してスライド移動可能に取り付けられる第二支持部材62とから構成された支持部材を使用して第一下肢保持部1及び第二下肢保持部2を取り付けることで、比較的簡易な支持機構によって、第一支持部材61と共に第二支持部材62を確実に回動させ、第二支持部材62のみを第一支持部材61に対して確実にスライド移動させることができる。また、シンプルな支持機構の構成とすることで、強固な支持機構を構成することも可能となっている。
【0084】
また、第一実施形態では、上記のように、前記第一下肢保持部1は、前記座部Bに対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さないものとなっている。第一実施形態の第一下肢保持部1は、座部Bに対して回動角度の調節のみが可能な支持構造を有した第一支持部材61によって支持され、この支持構造による回動角度の調節時に、脚の長手方向位置の実質的な移動調節を伴うことがない。このため、第一下肢保持部1の回動角度調節に伴う施療者の各下肢角度において、施療者のひざ下近傍の足のつぼや筋肉を的確に刺激することができる。すなわち、この構成は、前記第一下肢保持部1が、前記座部Bに対し、前記施療者の脚の長手方向への実質的なスライド移動を伴うことなく回動するように支持されていることを意味する。上記「脚の長手方向位置の実質的な移動調節」或いは「脚の長手方向への実質的なスライド移動」とは、施療者のひざ下の近傍から足先へ向かう部分の施療位置がずれることを意味しており、上記構成は、第一下肢保持部1の回動角度を調節可能であると共に、回動動作に伴って施療者のひざ下から足先へ向かう部分の施療位置が脚の長手方向で変わることがない構成を特定する。ただし、回動機構によっては、ガタつきや機構上の遊び、或いは弾性材を介した弾性移動等によって、脚の長手方向への多少の移動を伴う場合がある。つまり、上記「前記施療者の脚の長手方向への実質的なスライド移動を伴うことなく」とは、施療位置のずれを伴わない程度での前記脚の長手方向への多少の移動を許容する意味である。
【0085】
また、第一実施形態では、上記のように、椅子式マッサージ機は、前記座部B、第一下肢保持部1又は第二下肢保持部2の少なくともいずれかと、前記第三下肢保持部3との間に、第三下肢保持部3を弾性支持する弾性支持部材65をさらに備える。そして第三下肢保持部3は、施療者の足裏を当接させて足を収容する足収容部3Dを有し、前記足収容部3Dに施療者の足を収容して前記足載せ部Oに施療者の下肢をセットすることにより、前記第三下肢保持部3がスライド移動し、前記弾性支持部材65は、第三下肢保持部3のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置において、第三下肢保持部3を、上向きの弾性反力が生じた状態で弾性支持するように構成されている。この構成によれば、弾性支持部材65によって第三下肢保持部3を弾性支持しており、施療者の足を第三下肢保持部3内へセットすることでこの弾性支持位置が弾性反力により可変し、このとき足収容部3D内に収容した施療者の足裏に、弾性反力による第三下肢保持部3からの面圧がかかることとなる。これにより、セットした足裏と第三下肢保持部3とが離れることなく適度な弾性反力を持って当接したまま、施療者の下肢(足裏)を確実に収容保持することとなり、より的確な位置に施療子を調節することが可能となっている。
【0086】
なお、前記弾性支持部材65はさらに、前記第三下肢保持部3を前記第一下肢保持部1側へ付勢させるものであり、非使用時に第三下肢保持部3が第一下肢保持部1側に近接移動するものとしてもよい。このように、足載せ部Oの全長を縮める方向へ自動付勢させることで、非使用時にコンパクトな収納形態を維持することができる。
【0087】
また、第一実施形態では、上記のように、椅子式マッサージ機は、座部Bと、前記座部Bの前方に回動可能に設けられた第一下肢保持部1と、前記第一下肢保持部1に隣接するように設けられた第二下肢保持部2と、前記第二下肢保持部2の前記第一下肢保持部1とは反対側に隣接するように設けられた第三下肢保持部3と、前記第一下肢保持部1、前記第二下肢保持部2及び前記第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする施療子4とを含む足載せ部Oと、前記第一下肢保持部1と前記第三下肢保持部3との間の移動可能範囲内で、前記第一下肢保持部1の移動又は回動動作、及び、前記第三下肢保持部3の移動又は回動動作のそれぞれとは独立して、前記第二下肢保持部2を施療者の脚の長手方向にスライド移動させるための第二駆動源71とを備えることを特徴とする。ここで、上記背景技術において列挙したような従来のリンク機構を有するマッサージ機では、足先側の脚保持部材の押し当て面が押し出された場合に、リンク機構により、3つの脚保持部材(下肢保持部)をそれぞれ予め定められた位置に配置する構成である。このため、特に、脚の根元側の施療部位に対応する脚保持部材(下肢保持部)と、脚の根元側の施療部位に対応する脚保持部材に隣接する脚保持部材との位置が施療者の所望するマッサージ位置とずれた位置に配置される場合があるという問題点があった。これに対して上記構成によれば、第一下肢保持部1と第三下肢保持部3との間で、第一下肢保持部1及び第三下肢保持部3とは独立して第二下肢保持部2を施療者の脚の長手方向にスライド移動させるための第二駆動源71を設けることによって、上記背景技術のマッサージ機のように3つの下肢保持部がリンク機構により連動して予め定められた位置に移動する構成とは異なり、第二駆動源71を駆動することにより、第一下肢保持部1及び第三下肢保持部3とは独立して第二下肢保持部2を施療者の所望する部位に移動させることができる。これにより、下肢保持部の位置が施療者の所望するマッサージ位置とずれた位置に配置されることを抑制することができる。
【0088】
すなわち、第二駆動源71により、第一下肢保持部1の回動及び前記第三下肢保持部3の移動又は回動動作とは独立させたまま、第二下肢保持部2のみをスライド移動させることで、例えば、脚の長さを施療者に適した長さに合わせたまま、第二下肢保持部2による施療位置を、独立した第二駆動源71によって容易に調節できるものとなる。
【0089】
また、第一実施形態では、上記のように、施療子4は、一対の第一凹部1Dの各々の両側部にそれぞれ設けられ、施療者のひざ下からふくらはぎの各側部を施療する一対の第一側部施療子41Sと、一対の第一凹部1Dの各々の両底部に設けられ、施療者のひざ下からふくらはぎの裏部を施療する第一底部施療子41Bと、を含む。また、前記第二下肢保持部2及び第三下肢保持部3は、それぞれ互いに独立して、前記第一下肢保持部1に対し施療者の脚の長手方向にスライド移動可能に構成されている。このように第二下肢保持部2と第三下肢保持部3とのそれぞれを、互いに独立して、第一下肢保持部1に対し施療者の脚の長手方向にスライド移動可能とすることによって、第二下肢保持部2及び第三下肢保持部3をそれぞれ任意のスライド移動位置、すなわち、施療者の所望する位置に独立配置することができる。その結果、施療者の所望するマッサージ位置にて、より的確な施療を行うことが可能となる。また、第一実施形態の椅子式マッサージ機は、第一ないし第三下肢保持部1〜3によって下肢を三分割位置で確実に保持しながら、第一〜第三下肢保持部1〜3による支持及び施療とは独立して、施療者のふくらはぎの側部及び裏部の施療を行うことができるものとなっている。
【0090】
なお、前記背景技術において列挙したような従来のマッサージ機のうち、施療者の左右脚をまとめて配置する構成の足載せ部を有したものは、施療者の左右のふくらはぎそれぞれの両側部を保持して十分にマッサージすることができず、また、施療者の左右脚の各々を挟みこむことができないため安定して保持することができないという不都合があった。このため、例えば脚を収容する凹部内のエアバッグが膨張したときに、凹部内に収容した使用者の脚が凹部の解放側へ押し出され、施療者の脚の両側面や裏面を十分にマッサージすることができない場合が生じるといった課題を有していた。また、前記従来のマッサージ機のうち、施療者の左右脚それぞれを挟むようにエアバッグが配置されたものでは、脚の裏面側に対応するエアバッグが設けられてないため、施療者の各々の脚を十分にマッサージすることができないといった課題を有していた。これに対し、上記構成における第一ないし第三下肢保持部1〜3によって、下肢を三分割位置で確実に保持した最上部にて、第一側部施療子41Sと第一底部施療子41Bとによって、各々の脚のふくらはぎの裏側と両側部を同時に又は順次に、或いは交互に施療することが可能となり、施療者の各々の脚を十分にマッサージすることができるものとなっている。
【0091】
また、第一実施形態では、上記のように、前記第二下肢保持部2は、施療者の両足それぞれの足首からふくらはぎの間の部分を配置可能な一対の第二凹部2Dを含み、前記施療子4は、前記一対の第二凹部2Dの各々の両側部にそれぞれ設けられ、施療者の足首からふくらはぎの間の各側部を施療する一対の第二側部施療子42Sを含むものとなっている。上記構成によれば、前記第一凹部1Dによるひざの下部近傍の支持部分の直下にて、各々の脚のふくらはぎから足首の間の部分を、一対の第二凹部2D内へ収容することとなる。これにより、施療者の脚の下肢の角度を所定のものに保ったまま両下肢を確実に保持することができる。また、前記第一下肢保持部1による施療に加えて第二下肢保持部2でも施療を行うことで、第一側部施療子41S及び第一底部施療子41Bとによる、下肢を三分割保持した最上部の施療に加え、各々の脚のふくらはぎから足首の間の範囲における両側部を同時に又は順次に、或いは交互に施療することが可能となり、施療者の各々の下肢を広範囲に分散した位置で、より十分にマッサージすることができるものとなっている。
【0092】
また、第一実施形態では、上記のように、前記一対の第一側部施療子41Sは、それぞれ、空気が流入又は排出されることにより膨縮可能な第一側部膨縮袋410Sであり、前記第一底部施療子41Bは、空気が流入又は排出されることにより膨縮可能な第一底部膨縮袋410Bであり、これら第一側部膨縮袋410Sと第一底部膨縮袋410Bとは、互いに独立して膨縮可能であるものとなっている。互いに相関することなく独立して膨縮し得る膨縮袋を側部、底部それぞれに設けることで、側部の膨縮施療と底部のいずれか又は双方の膨縮施療をそれぞれ独自のタイミングで別個に、或いは任意のタイミングで組み合せて行うことができ、より十分なマッサージ効果を得ることが可能となっている。
【0093】
また、第一実施形態では、上記のように、前記第一底部施療子41Bは、前記第一凹部1Dを構成する各底面に対応する位置で上下方向に並設された複数の第一底部膨縮袋410Bを含み、これら並設された第一底部膨縮袋410Bは、それぞれ、互いに独立して膨張収縮可能であるものとなっている。このように構成すれば、底面に対応する上下の膨縮施療をそれぞれ独自のタイミングで別個に、或いは任意のタイミングで組み合せて行うことができ、より十分なマッサージ効果を得ることが可能となっている。
【0094】
(第二実施形態)
図13に示す第二実施形態の椅子式マッサージ機は、前記第一実施形態の椅子式マッサージ機とは、第二下肢保持部の奥行き方向の長さの点で異なっており、他の基本構成、構造、動作及び効果は第一実施形態と同様である。以下、第一実施形態との相違点を中心に説明する。
【0095】
第二実施形態では、図13に示すように、第二下肢保持部2の奥行き方向(前後方向)の最大長さ2Lが、第一下肢保持部1の奥行き方向(前後方向)の最大長さ1L、第三下肢保持部3の奥行き方向(前後方向)の最大長さ3Lのいずれよりも小さいものとしている。また、第一下肢保持部1の奥行き方向(前後方向)の最大長さ1Lが、第三下肢保持部3の奥行き方向(前後方向)の最大長さ3Lよりも小さいものとしている。第二下肢保持部2の奥行き方向の最大長さ2Lを短く構成し、その内部に一対形成した第二凹部2Dの各側面に第二側部施療子42Sを配置することで、くるぶし、ふくらはぎ下の足首神経といった小範囲の施療部分を大きく外れることなく、ピンポイントで集中的に施療することができる。また、第二側部施療子42が足首の側部よりも後方の範囲内にのみ配されることとなり、他の箇所と比較して細い足首の形状に対応した適度な施療を可能としている。
【0096】
(他の実施形態例(変形例))
本発明は、上述した第一実施形態及び第二実施形態に限定されることなく、本発明の趣旨を逸脱しない範囲で種々の変更又は変形が可能である。第一実施形態及び第二実施形態では、第一下肢保持部1の第一凹部1Dの側面に対応する位置に左右一対の第一側部膨縮袋410Sを配置し、底面に対応する位置に第一底部膨縮袋410Bを上下に分割して並設した例(図14(a))について示したが、本発明はこれに限られない。本発明では、例えば、図14(b)に示すように、第一凹部1Dの側面に対応する位置に左右一対の第一側部膨縮袋410Sを上下に分割して並設してもよいし、底面に対応する位置に第一底部膨縮袋410Bを1つのみ設けてもよい。つまり、ふくらはぎの各側面を上部と下部とに分けて施療可能としている。また、図14cに示すように、第一凹部1D内の底面に対応する位置に配置した第一底部膨縮袋410Bを左右に分割して並設するようにしてもよい。つまり、ふくらはぎ裏面をさらに左右部分に分けて施療可能としている。
【0097】
また、第一実施形態及び第二実施形態では、第二下肢保持部2の第二凹部2Dの側面に対応する位置のみに左右一対の第二側部膨縮袋420Sを配置し、底面に対応する位置には膨縮袋を配置しない例(図14(a))について示したが、本発明はこれに限られない。本発明では、例えば、図14(d)に示すように、第二凹部2Dの底面に対応する位置に第二底部施療子42B(第二底部膨縮袋420B)を設けても良い。これにより、施療者のふくらはぎ下部から足首の裏面側の筋肉と腱とを接続する箇所及び腱を第二底部膨縮袋420Bにより押圧し、筋肉と腱とを接続する箇所及び腱をストレッチする施療を行う事ができる。
【0098】
また、第一及び第二実施形態では、施療子4を、第一側部施療子41S、第一底部施療子41B、第二側部施療子42S、第三側部施療子43Sをそれぞれ空気膨縮袋たるエアバッグで構成し、エアーの給排気機構によってそれぞれ独立して膨張収縮可能としているが、本発明はこれに限られない。これら第一側部施療子41S、第一底部施療子41B、第二側部施療子42S、第三側部施療子43Sのうち、少なくともいずれかを突起体からなる施療子又は揉み玉で構成してもよい。また、第三底部施療子として足裏施療子44を、下部に備えたエアバッグの膨張縮で移動する突起体によって構成しているが、これを機械駆動式の揉み玉又は突起体とし、或いは空気膨縮袋たるエアバッグで構成してエアーの直接の給排気機構によって足裏へ直接接触しながら膨張収縮するものとしてもよい。
【0099】
また、第一及び第二実施形態では、板金製作によって第一支持部材61の第一プレート部60A及び側部60Bを形成している(図6、図7)が、棒状のフレーム部によって第一支持部材を構成してもよい。また、第一駆動源55、第二駆動源71は、それぞれ、座の下部にてフレーム支持された第一駆動源55(図3)、第二支持部材62のフレーム部70内に支持された第二駆動源71(図6、図7)からなるものとしているが、この他に、エアーの給排気構造によって第二下肢保持部2をスライド移動するために駆動したり第一下肢保持部1を回動させたりするものでもよい。また、駆動源として、ステッピングモーター、サーボモーターを備えたものとし、移動量判別用のセンサ5Sやセンサ識別孔52hを省略することも可能である。
【0100】
また、第一及び第二実施形態では、第一下肢保持部1及び第二下肢保持部2を第一駆動源55及び第二駆動源71によってそれぞれ回動及び伸縮させ、第三下肢保持部3を弾性支持部材65によって弾性支持することでスライド量(伸縮量)を自動調節しているが、本発明はこれに限られない。本発明では、他の形態として、第二下肢保持部2の第二駆動源71を取り除くか第二駆動源71と共に弾性支持部材によって第二支持部材62を支持しスライド移動せしめるものとしてもよく、第三下肢保持部3を駆動源によってスライド駆動させてもよい。上記のほか、例えば実施例間の各要素の組み合わせ、一部要素の付加、削除、公知部品への置換、部品形状又は部品材質の適宜変更や一部要素のみの抽出、一体又は別体の構成変更といった変更又は変形が可能である。
【符号の説明】
【0101】
1 第一下肢保持部
1D 第一凹部
2 第二下肢保持部
2D 第二凹部
3 第三下肢保持部
3D 第三凹部(足収容部)
4 施療子
410S 側部膨縮袋(第一側部膨縮袋)
410B 底部膨縮袋(第一底部膨縮袋)
41S 第一側部施療子
41B 第一底部施療子
42S 第二側部施療子
42B 第二底部施療子
61 第一支持部材
62 第二支持部材
63 第三支持部材
65 弾性支持部材
71 第二駆動源(駆動源)
B 座部
O 足載せ部
【技術分野】
【0001】
本発明は、着座した施療者にマッサージを行う椅子式のマッサージ機であって、特に施療者の下肢部をマッサージするものに関する。
【背景技術】
【0002】
従来、施療者の下肢部をマッサージする施療子を含む足載せ部を備える椅子式マッサージ機が知られている(たとえば、特許文献1参照)。上記特許文献1には、脚の長さ方向に隣接して並ぶように配置される3つの脚保持部材(下肢保持部)が設けられた足載せ部を備えるマッサージ機が開示されている。この特許文献1によるマッサージ機の3つの脚保持部材のうち施療者の足先側の脚保持部材には、施療者の足裏と対応する押し当て面が設けられている。また、特許文献1によるマッサージ機には、施療者が足裏で足先側の脚保持部材の押し当て面を押し出した場合に、3つの脚保持部材がそれぞれ連動して施療者の脚の長さに対応した位置に一義的に配置されるように設定されたリンク機構が設けられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4121012号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1によるマッサージ機は、足先側の脚保持部材の押し当て面が押し出された場合に、リンク機構によって、3つの脚保持部材(下肢保持部)がそれぞれ連動して施療者の脚の長さに対応した位置に一義的に配置されるため、3つの脚保持部材が施療者の脚の長さに一対一に対応する予め定められた位置に固定的に配置される。このため、脚の根元側の施療部位に対応する脚保持部材(下肢保持部)と、脚の根元側の施療部位に対応する脚保持部材に隣接する脚保持部材との位置が、施療者の所望するマッサージ位置とずれた位置に配置される場合があるという問題点がある。
【0005】
そこで、この発明は、下肢保持部が、施療者の所望するマッサージ位置とずれた位置に配置されることを抑制し、施療者の所望するマッサージ位置にて、より的確な施療を行うことが可能な椅子式マッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明は、上記のような課題を解決するためになされたものであり、以下(1)〜(13)の手段を講じている。
(1)本発明の第一の局面の椅子式マッサージ機は、座部と、
前記座部の前方に回動可能に設けられた第一下肢保持部と、前記第一下肢保持部に隣接するように設けられた第二下肢保持部と、前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接するように設けられた第三下肢保持部と、前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部とを備え、
前記足載せ部の第二下肢保持部及び第三下肢保持部は、それぞれ互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能に構成される。
【0007】
このように、第二下肢保持部と第三下肢保持部とのそれぞれを、互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能とすることによって、第二下肢保持部及び第三下肢保持部をそれぞれ任意のスライド移動位置、すなわち、施療者の所望する位置に独立配置することができる。その結果、施療者の所望するマッサージ位置にて、より的確な施療を行うことが可能となる。
【0008】
(2)前記椅子式マッサージ機において、前記第一下肢保持部及び前記第三下肢保持部とは独立して、前記第二下肢保持部を施療者の脚の長手方向へスライド移動させるための駆動源をさらに備えることが好ましい。
【0009】
このように構成すれば、例えば、第三下肢保持部を施療者の脚の長さに対応するように所定のスライド位置に配置し、第一下肢保持部と第三下肢保持部との間の間隔を保ったまま、駆動源を駆動することにより、第二下肢保持部を施療者の脚の長手方向へスライド移動させることができる。これにより、第一下肢保持部、第三下肢保持部のそれぞれの施療子により施療マッサージを行いながら、さらにその間の範囲内の任意の位置で第二下肢保持部による施療マッサージを行うことが可能となる。
【0010】
(3)前記いずれか記載の椅子式マッサージ機において、前記第一下肢保持部を支持し、前記座部の前方に回動可能に設けられた第一支持部材と、
前記第二下肢保持部を支持し、前記第一支持部材に対して施療者の脚の長手方向にスライド移動可能な第二支持部材とをさらに備え、
前記駆動源は、前記第二支持部材を前記第一支持部材に対して施療者の脚の長手方向にスライド移動させるように構成することが好ましい。
【0011】
このように構成すれば、第一支持部材と第一支持部材に対してスライド移動可能に取り付けられる第二支持部材とにより、強度を確保しながら第一、第二下肢保持部を支持することができるので、比較的安定した状態で第二下肢保持部を確実にスライド移動させることができる。
【0012】
(4)前記いずれか記載の椅子式マッサージ機において、前記第一下肢保持部は、前記座部に対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さないことが好ましい。
【0013】
このように構成すれば、第一下肢保持部の回動時に、第一下肢保持部が脚の長手方向に実質的に移動されることがない。このため、第一下肢保持部の回動角度調節に伴う施療者の各下肢角度において、施療者のひざ下近傍の足のつぼや筋肉を的確に刺激することができる。すなわち、この構成は、前記第一下肢保持部が、前記座部に対し、前記施療者の脚の長手方向への実質的なスライド移動を伴うことなく回動するように支持されていることを意味する。上記「施療者の脚の長手方向への移動距離調節」或いは「脚の長手方向への実質的なスライド移動」とは、施療者のひざ下の近傍から足先へ向かう部分の施療位置がずれることを意味しており、上記構成は、第一下肢保持部の回動角度を調節可能であると共に、回動動作に伴って施療者のひざ下から足先へ向かう部分の施療位置が脚の長手方向で変わることがない構成を特定する。ただし、回動機構によっては、ガタつきや機構上の遊び、或いは弾性材を介した弾性移動等によって、脚の長手方向への多少の移動を伴う場合がある。上記「施療者の脚の長手方向への実質的なスライド移動を伴うことなく」とは、施療位置のずれを伴わない程度での前記脚の長手方向への多少の移動を許容する意味である。
【0014】
(5)前記いずれか記載の椅子式マッサージ機において、前記座部、第一下肢保持部又は第二下肢保持部の少なくともいずれかと、前記第三下肢保持部との間に、第三下肢保持部を弾性支持する弾性支持部材をさらに備え、
第三下肢保持部は、施療者の足裏を当接させて足を収容する足収容部を有し、
前記足収容部に施療者の足を収容して前記足載せ部に施療者の下肢をセットすることにより、前記第三下肢保持部がスライド移動し、前記弾性支持部材は、第三下肢保持部のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置において、第三下肢保持部を、前記第三下肢保持部側向きの弾性反力が生じた状態で弾性支持するように構成されていることが好ましい。
【0015】
このように構成すれば、施療者の足を第三下肢保持部内へセットすることにより、施療者の脚部の長さに応じて第三下肢保持部の弾性支持位置が弾性反力によって可変する。この場合において、足収容部内に収容した施療者の足裏に、弾性反力による第三下肢保持部からの面圧がかかることとなる。これにより、セットした足裏と第三下肢保持部とが離れることなく適度な弾性反力を持って当接したまま、施療者の下肢を確実に収容保持することが可能となるので、より的確な位置に施療子を調節することが可能となる。
【0016】
(6)本発明の第二の局面の椅子式マッサージ機は、座部と、
前記座部の前方に回動可能に設けられた第一下肢保持部と、前記第一下肢保持部に隣接するように設けられた第二下肢保持部と、前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接するように設けられた第三下肢保持部と、前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部と、
前記第一下肢保持部と前記第三下肢保持部との間の移動可能範囲内で、前記第一下肢保持部の移動又は回動動作、及び、前記第三下肢保持部の移動動作とは独立して、前記第二下肢保持部を施療者の脚の長手方向にスライド移動させるための駆動源とを備える。
【0017】
上記構成によれば、第一下肢保持部と第三下肢保持部との間で、第一下肢保持部及び第三下肢保持部とは独立して第二下肢保持部を施療者の脚の長手方向にスライド移動させるための駆動源を設けることによって、従来技術である3つの下肢保持部がリンク機構により連動して予め定められた位置に移動する構成とは異なり、駆動源を駆動することにより、第一下肢保持部及び第三下肢保持部とは独立して第二下肢保持部を施療者の所望する部位に移動させることができる。これにより、下肢保持部の位置が施療者の所望するマッサージ位置とずれた位置に配置されることを抑制することができる。すなわち、駆動源により、第一下肢保持部の移動又は回動及び前記第三下肢保持部の移動動作とは独立させたまま、第二下肢保持部をスライド移動させることで、例えば、脚の長さを施療者に適した脚の長さに合わせた状態で、第二下肢保持部による施療位置を、独立した駆動源によって容易に調節できるものとなる。
【0018】
(7)前記(6)記載の椅子式マッサージ機において、前記第一下肢保持部は、前記座部に対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さないことが好ましい。このように構成すれば、第一下肢保持部の回動時に、第一下肢保持部が脚の長手方向位置に実質的に移動されることがない。このため、第一下肢保持部の回動角度調節に伴う施療者の各下肢角度において、施療者のひざ下近傍のつぼや筋肉を的確に刺激することができる。
【0019】
すなわち、この構成は、前記第一下肢保持部が、前記座部に対し、施療者の脚の長手方向への実質的なスライド移動を伴うことなく回動するように支持されていることを意味する。上記「脚施療者の脚の長手方向への移動距離調節」或いは「脚の長手方向への実質的なスライド移動」とは、施療者のひざ下の近傍から足先へ向かう部分の施療位置がずれることを意味しており、上記構成は、第一下肢保持部の回動角度を調節可能であると共に、回動動作に伴って施療者のひざ下から足先へ向かう部分の施療位置が脚の長手方向で変わることがない構成を特定する。ただし、回動機構によっては、ガタつきや機構上の遊び、或いは弾性材を介した弾性移動等によって、脚の長手方向への多少の移動を伴う場合がある。上記「施療者の脚の長手方向への実質的なスライド移動を伴うことなく」とは、施療位置のずれを伴わない程度での前記脚の長手方向への多少の移動を許容する意味である。
【0020】
(8)前記(6)又は(7)に記載の椅子式マッサージ機において、前記第三下肢保持部は、前記第一下肢保持部及び前記第二下肢保持部の少なくともいずれか一方の移動又は回動動作とは独立して、施療者の脚の長手方向にスライド移動するように構成されていることが好ましい。
【0021】
このような構成であれば、例えば、第一下肢保持部を所定の回動角度に調節すると共に第二下肢保持部を所定のスライド位置に配置して施療者の下肢をセットした状態のまま、第三下肢保持部を施療者の脚の長手方向へスライド移動させることができる(例えば後述の図12参照)。これにより、第一下肢保持部、第二下肢保持部のそれぞれによる施療マッサージを行いながら、さらに第二下肢保持部よりも脚の先端側の範囲内の任意のスライド位置で第三下肢保持部による施療マッサージを行うことが可能となる。
【0022】
(9)前記(6)(7)又は(8)のいずれか記載の椅子式マッサージ機において、 前記座部、前記第一下肢保持部又は第二下肢保持部の少なくともいずれかと、前記第三下肢保持部との間に、前記第三下肢保持部を弾性支持する弾性支持部材をさらに備え、
前記第三下肢保持部は、施療者の足裏を当接させて足を収容する足収容部を有し、
前記足収容部に施療者の足を収容して前記足載せ部に施療者の下肢をセットすることにより、前記第三下肢保持部がスライド移動し、
前記弾性支持部材は、前記第三下肢保持部のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置で前記第三下肢保持部を弾性支持するように構成されていることが好ましい。
【0023】
このように構成すれば、施療者の足を第三下肢保持部内へセットすることにより、施療者の脚部の長さに応じて第三下肢保持部の弾性支持位置が弾性反力によって可変する。この場合において、足収容部内に収容した施療者の足裏に、弾性反力による第三下肢保持部からの面圧がかかることとなる。これにより、セットした足裏と第三下肢保持部とが離れることなく適度な弾性反力を持って当接したまま、施療者の下肢を確実に収容保持することが可能となるので、より的確な位置に施療子を調節することが可能となる。
【0024】
(10)本発明の第三の局面の椅子式マッサージ機は、
座部と、
前記座部に着座した施療者の左右のふくらはぎ部分をそれぞれ配置可能な一対の第一凹部を含み、前記座部の前方に回動可能に設けられた第一下肢保持部と、
前記第一下肢保持部に隣接すると共に第一下肢保持部から施療者の足先方向へ分離可能に設けられた第二下肢保持部と、
前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接すると共に前記第二下肢保持部から施療者の足先方向へ分離可能に設けられた第三下肢保持部と、
前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを備え、
前記施療子は、前記一対の第一凹部の各々の両側部にそれぞれ設けられ、施療者のふくらはぎの各側部を施療する一対の第一側部施療子と、前記一対の第一凹部の各々の両底部に設けられ、施療者のふくらはぎの裏部を施療する第一底部施療子と、を含み、
前記第二下肢保持部及び第三下肢保持部は、それぞれ互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能に構成される。
【0025】
このように、第二下肢保持部と第三下肢保持部とのそれぞれを、互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能とすることによって、第二下肢保持部及び第三下肢保持部をそれぞれ任意のスライド移動位置、すなわち、施療者の所望する位置に独立配置することができる。その結果、施療者の所望するマッサージ位置にて、より的確な施療を行うことが可能となる。また、このような構成であれば、第一〜第三下肢保持部によって下肢を三分割位置で確実に保持しながら、第一、第二及び第三下肢保持部による支持、及び、第一、第二及び第三下肢保持部の施療子による施療とは独立して、施療者のふくらはぎの側部及び裏部を確実に施療することができる。
【0026】
(11)また、前記(10)記載の椅子式マッサージ機において、
前記第二下肢保持部は、施療者の両足それぞれの足首からふくらはぎの間の部分を配置可能な一対の第二凹部を含み、
前記施療子は、前記一対の第二凹部の各々の両側部にそれぞれ設けられ、施療者の足首からふくらはぎの間の各側部を施療する一対の第二側部施療子と、前記一対の第二凹部の各々の両底部に設けられ、施療者の足首からふくらはぎの間の裏部を施療する第二底部施療子と、の少なくともいずれかを含むことが好ましい。
【0027】
このように構成すれば、第一凹部によるひざ裏の下部近傍の支持部分の直下にて、各々の脚のふくらはぎから足首の間の部分を、一対の第二凹部内へ収容することとなる。これにより、施療者の脚の下肢の角度を所定のものに保ったまま両下肢を確実に保持することができる。また、前記第一下肢保持部による施療に加えて第二下肢保持部でも施療を行うことにより、第一側部施療子及び第一底部施療子による、下肢を三分割保持した最上部の施療に加え、各々の脚のふくらはぎから足首の間の範囲における裏側、或いは両側部を同時に又は順次に、或いは交互に施療することが可能となり、施療者の各々の下肢を広範囲に分散した位置で、より十分にマッサージすることができる。
【0028】
(12)前記(10)又は(11)記載の椅子式マッサージ機において、
前記一対の第一側部施療子は、それぞれ、気体又は液体が流入又は排出されることにより膨縮可能な側部膨縮袋を含み、
前記第一底部施療子は、気体又は液体が流入又は排出されることにより膨縮可能な底部膨縮袋を含み、
前記側部膨縮袋と前記底部膨縮袋とは、互いに独立して膨縮可能であることが好ましい。
【0029】
このように互いに相関することなく独立して膨縮し得る膨縮袋を側部、底部それぞれに設けることによって、側部の膨縮施療と底部のいずれか又は双方の膨縮施療をそれぞれ独自のタイミングで別個に、或いは任意のタイミングで組み合せて行うことができ、より十分なマッサージ効果を得ることが可能となる。
【0030】
(13)前記(10)(11)又は(12)のいずれか記載の椅子式マッサージ機において、
前記一対の第一側部施療子のそれぞれ又は前記第一底部施療子1は、前記第一凹部を構成する各側面又は底面に対応する位置で上下又は左右方向に並設された複数の側部膨縮袋又は底部膨縮袋を含み、
前記並設された複数の側部膨縮袋又は底部膨縮袋は、それぞれ、互いに独立して膨張収縮可能であることが好ましい。このように凹部の各面に対応する位置で膨縮袋を複数個に分割し並べて配置することによって、各面に対応する位置の上下又は左右のいずれかまた双方の膨縮施療をそれぞれ独自のタイミングで別個に、或いは任意のタイミングで組み合せて行うことができるので、施療のバリエーションを増やすことができる。その結果、より十分なマッサージ効果を得ることが可能となる。
【発明の効果】
【0031】
上記手段を講じることで、足載せ部を第一下肢保持部、第二下肢保持部及び第三下肢保持部に分けて構成し、それぞれで施療者の下肢を支持することによって、施療者の下肢を所定角度及び所定の長さで確実に保持して、下肢保持部が、施療者の所望するマッサージ位置とずれた位置に配置されることを抑制しながら、施療者の所望する各下肢保持部のマッサージ位置にてより的確な施療を行うことができるものとなった。
【図面の簡単な説明】
【0032】
【図1】本発明の第一実施形態の椅子式マッサージ機の斜視外観図。
【図2】図1に示す第一実施形態の椅子式マッサージ機の側面図。
【図3】第一実施形態の椅子式マッサージ機の足載せ部Oの支持機構を示す側面視断面説明図。
【図4】第一実施形態の椅子式マッサージ機の足載せ部Oのみの斜視外観図。
【図5】第一実施形態の椅子式マッサージ機の足載せ部Oのみの正面図。
【図6】第一実施形態の椅子式マッサージ機の足載せ部Oの支持材の構成を示す正面分解説明図。
【図7】第一実施形態の椅子式マッサージ機の足載せ部Oの支持材の組み構成を示す正面説明図。
【図8】図7の側面図。
【図9】第一実施形態の椅子式マッサージ機の足載せOを収容した状態を示す側面図。
【図10】第一実施形態の椅子式マッサージ機の第一の使用状態例を示す側面説明図。
【図11】第一実施形態の椅子式マッサージ機の第二の使用状態例を示す側面説明図。
【図12】第一実施形態の椅子式マッサージ機の第三の使用状態例を示す側面説明図。
【図13】本発明の第二実施形態の椅子式マッサージ機の足載せOを収容した状態を示す側面図。
【図14】本発明の椅子式マッサージ機における他の膨縮袋構成の実施形態を示す正面説明図。
【図15】第一実施形態の椅子式マッサージ機の第二側部施療子42Sの(a)収縮及び(b)膨出状態を示す斜視部品説明図。
【発明を実施するための形態】
【0033】
以下、本発明を実施するための形態につき、実施例として示す各図と共に説明する。図1〜図12及び図15は本発明の第一実施形態の椅子式マッサージ機を示し、このうち図10〜12は使用状態例を示す。図13は本発明の第二実施形態の椅子式マッサージ機を示し、図14は本発明の椅子式マッサージ機の他の実施形態を示す。
【0034】
(第一実施形態)
図1〜図12及び図15に示す本発明の第一実施形態の椅子式マッサージ機は、座部Bと、前記座部Bの前方に回動可能に設けられた第一下肢保持部1と、前記第一下肢保持部1に隣接するように設けられた第二下肢保持部2と、前記第二下肢保持部2の前記第一下肢保持部1とは反対側に隣接するように設けられた第三下肢保持部3と、前記第一下肢保持部1、前記第二下肢保持部2及び前記第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする施療子4とを含む足載せ部Oとを備える。また、前記足載せ部Oにおいては、第一下肢保持部1を支持し、前記座部Bの前方に回動可能に設けられた第一支持部材61と、前記第二下肢保持部2を支持し、前記第一支持部材61に対して施療者の脚の長手方向にスライド移動可能な第二支持部材62と、前記第三下肢保持部3を支持し、前記第一支持部材61に対して施療者の脚の長手方向にスライド移動可能な第三支持部材63とをさらに備える。以下、各構成につき詳述する。
【0035】
(座部Bの構成)
第一実施形態の座部Bは、下部に収容空間が形成されると共に上面への施療子を内蔵した座B1と、座B1の両側部にて肘収容溝を有して前後延出形成されると共に溝内に施療子を内蔵した肘掛B2と、座B1の背部から角度調節可能に設けられると共に前面への施療子を内蔵した背B3と、を具備して構成される(図1,2)。座B1の下部には、足載せ部Oを回動調節可能に支持する回動機構が収容される(図3)。また、座B1の下部或いは背B3の内部には、駆動制御を行う制御部が内蔵されている。また、第一実施形態の椅子式マッサージ機は、この制御部から有線又は無線電送可能な操作部(図示せず)を有している。施療者(ユーザ)は、操作部を操作することにより、後述する各駆動源を制御し、足載せ部Oの各構成である下肢保持部の位置や、それぞれの下肢保持部の施療子4の施療の有無或いは強弱或いは施療パターンを調節又は設定することができる。
【0036】
(足載せ部O)
ここで、第一実施形態では、上述したように、足載せ部Oは、座部Bの前方に回動可能に設けられた第一下肢保持部1と、前記第一下肢保持部1に隣接するように設けられた第二下肢保持部2と、前記第二下肢保持部2の前記第一下肢保持部1とは反対側に隣接するように設けられた第三下肢保持部3と、前記第一下肢保持部1、前記第二下肢保持部2及び前記第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする施療子4とを含む。足載せ部Oの第二下肢保持部2及び第三下肢保持部3は、それぞれ互いに独立して、前記第一下肢保持部1に対し施療者の脚の長手方向にスライド移動可能に構成されている。
【0037】
ここで、前記座部Bの内部には、図3に示すように、前記第一下肢保持部1を施療者の脚の長手方向へ実質的にスライド移動させることなく座部Bに対して回動をさせるための第一駆動源55を備える。また、第二支持部材62上には、図6に示すように、前記第一駆動源55とは独立して、前記第二下肢保持部2を施療者の脚の長手方向へスライド移動させるための第二駆動源71が設けられている。また、第三支持部材63内には、前記第一駆動源55及び第二駆動源71とは独立して、第三下肢保持部3を施療者の脚の長手方向へスライド移動させるための弾性支持部材65が設けられている。上記第二駆動源71及び弾性支持部材65によって、足載せ部Oの第二下肢保持部2及び第三下肢保持部3は、それぞれ互いに独立して、前記第一下肢保持部1に対し足載せ部Oに配置された施療者の脚の長手方向にスライド移動可能に構成されるものとなっている。
【0038】
(第一下肢保持部1)
第一下肢保持部1は、図4に示すように、前記座部Bに着座した施療者の左右のふくらはぎ部分をそれぞれ配置可能な一対の第一凹部1Dを含み、第一支持部材61(図6参照)に固定されることで、背面側から支持される。そして、この第一支持部材61と座部Bの前方に設けられた座フレームBFとの固定ピン61Pを介した固定構造(図2及び図6参照)によって、第一下肢保持部1が、座部Bの前方に回動可能に設けられると共に、座部Bに対して任意の角度に回動調節可能に支持される。
【0039】
ここで、第一支持部材61は、回動調節可能であると共に施療者の脚の長手方向への移動距離調節機能を有さないものとしている。つまり、第一下肢保持部1が、座部Bに対して回動角度のみの調節が可能な第一支持部材61によって座部Bに回動可能に支持され、この回動支持構造による回動角度の調節時に、脚の長手方向位置の実質的な移動調節を伴うことがない。すなわち、第一支持部材61に固定されている第一下肢保持部1は、施療者の脚の長手方向へ実質的にスライド移動することなく回動するように構成されている。
【0040】
また、第一下肢保持部1は、図4及び図5に示すように、施療者の下肢のうちひざ下の背面に対向する部分を含むベース部10と、ベース部10の左右両側辺部分から前方へ突出成形された一対の側壁11とを具備する。各側壁11は、それぞれ、上辺が側壁11の突出端側に向かって緩やかに下方傾斜すると共に下辺が上辺よりも前方向に僅かに長く(より突出するように)形成されている。さらに、各側壁11のそれぞれの側辺は、側壁11の突出端側へ向かって左右方向の厚みが次第に薄く形成されている。また、側壁11の外側面の上部及び下側面には、それぞれ、内リブ13及び14が側壁11の突出方向に伸びて窪み形成される。これら内リブ13及び14は、施療子4(41S)が膨張した時の側壁11の歪み変形を抑えるものである。
【0041】
また、ベース部10の左右幅方向の略中央位置には、縦長長方形断面の略四角柱からなる中央突壁12が前方に突出するようにベース部10と一体成形されている(図4)。そして、左右の各側壁11と中央突壁12とにそれぞれ挟まれて前方(ベース部10の板前面側)に開放され、施療者の両脚それぞれのひざの下部からふくらはぎの間の部分を配置可能な一対の第一凹部1Dが第一下肢保持部1に形成される。また、それぞれの第一凹部1Dの各側面及び底面には施療子4(41S、41B)が配される。
【0042】
(第二下肢保持部2)
第二下肢保持部2は、第一下肢保持部1に隣接すると共に第一下肢保持部1から足載せ部Oに配置された施療者の脚の足先方向へ分離可能に設けられる。具体的には、第二下肢保持部2は、図4及び図5に示すように、前方を板状面とした正面視略横長矩形を有するベース部20(図5参照)と、ベース部20の左右両側部分から前方へ突出成形された一対の側壁21とを具備する。また、ベース部20の左右幅方向の略中央位置には、横長長方形断面の略四角柱からなる中央突壁22が前方に突出するようにベース部20と一体成形されている(図4参照)。そして、左右の各側壁21と中央突壁22とにそれぞれ挟まれて前方(ベース部20の板前面側)に開放され、施療者の両脚それぞれのふくらはぎから足首までの間の範囲の一部分を配置可能な一対の第二凹部2Dが第二下肢保持部2に形成される。そして、この第二凹部2Dの各側面には施療子4(42S)が配される。
【0043】
ベース部20は、施療者の下肢の背面に対向するように配置されており、背部が第二支持部材62(図6参照)にビス固定されて支持される。また、各側壁21は、ベース部20の側辺から前方へ突出成形された略台形柱状体からなり、後端付近の下辺から下方へ箱状の下方突出部が一体的に突出成形される。また、側壁21の略台形柱状部分及び下方突出部の各外側面には、内リブ23及び24が前後方向に伸びて窪み形成される。これら内リブ23及び24は、後述する施療子4(42S)が膨張した時の側壁21の歪み変形を抑えるものである。また、図5に示すように、ベース部20の上部には、背部のフレーム(第一支持部材61及び第二支持部材62(図6参照))の側面ないし前面を覆うカバー2Cがベース部20と一体的に上方突出形成される。カバー2Cの幅方向中央部は、突壁12,22の形状と共に前方に枠状に突出形成してなる。また、カバー2Cは、第二下肢保持部2が第一下肢保持部1側にスライド移動した場合に、第一下肢保持部1の裏面側に隠れるように構成されている。
【0044】
(第三下肢保持部3)
第三下肢保持部3は、第二下肢保持部2の前記第一下肢保持部1とは反対側に隣接すると共に第二下肢保持部2から施療者の足先方向へ分離可能に設けられる。具体的には、第三下肢保持部3は、第二下肢保持部2側を板状面とした正面視略横長矩形からなるベース部30と、ベース部30の左右両側部分から上方(第二下肢保持部2に向かう方向)へ突出成形された左右一対の側壁とを具備する。また、ベース部30の左右幅方向の略中央位置には、ベース部30の左右幅方向の略中央位置から上方(第二下肢保持部2側方向)に突出するように略台形柱状の中央突壁32がベース部30と一体成形されている(図4)。左右の各側壁と中央突壁32とにそれぞれ挟まれて上方(第二下肢保持部2に向かう方向)に開放され、施療者の両足それぞれの足裏を当接させて足部分全体を配置可能な一対の第三凹部3Dが形成される。そして、この第三凹部3Dの各側面及び底面には、施療子4(43S、43B)が配される。
【0045】
具体的には、ベース部30は、施療者が足載せ部Oに脚及び足を配置した際の足裏面に対向するように設けられ、前記第一下肢保持部1、第二下肢保持部2の各ベース部10及び20のうち広い表面が延びる方向とは略直交方向に広い表面が延びるように配置される。側壁は、ベース部30の左右側部から、第二下肢保持部2側に向かってベース部30と一体的に突出形成される。各側壁の後端(第三下肢保持部3に配置される足のかかとに対応する位置側)付近の上隅部は、側面視略L字状に切り欠き成形されている。この切り欠き成形部分の形状は、第二下肢保持部2の下方突出部に対応しており、第三下肢保持部3と第二下肢保持部2とが最接近した状態では、各側壁21,同士が上下接触すると共に切り欠き成形部と下方突出部とが組みあって一体的な下肢下半部の保持構造を構成する(図9)。また、足裏を当接させる板状のベース部30の裏面には、弾性材からなる接地脚3Fが左右一対に固定され、ベース部30の後端側には、接地転動し得るローラー3Rが左右一対に設けられる。
【0046】
また、第三下肢保持部3は、施療者の足裏を当接させて足を収容する左右一対の第三凹部(足収容部)3Dを有し、第三支持部材63によって第一支持部材61からスライド移動可能に支持される。さらに、第一実施形態による椅子式マッサージ機は、第二下肢保持部2と第三下肢保持部3との間に、第三下肢保持部3を弾性支持する弾性支持部材65を備える。
【0047】
また、第三下肢保持部3は、前記第一下肢保持部1及び前記第二下肢保持部2の移動又は回動動作とは独立した弾性支持機構によって、施療者の脚の長手方向へスライド移動するように構成されている。前記足載せ部Oに施療者の下肢をセットし、足収容部3Dに施療者の足を収容することにより、施療者の足により足収容部3Dが押圧される。これにより、前記第三下肢保持部3がスライド移動し、この第三下肢保持部3のスライド移動に伴って前記弾性支持部材65が伸長し、この弾性支持機構は、施療者の下肢の長さに合わせた脚の長手方向位置で第三下肢保持部3を弾性支持するものとしている。このように、弾性支持部材65によって第三下肢保持部3は弾性支持されており、施療者の足を第三下肢保持部3内へセットすることにより、第三下肢保持部3の弾性支持位置が弾性反力によって可変し、このとき足収容部3D内に収容した施療者の足裏に、弾性反力による第三下肢保持部3からの面圧がかかることとなる。これにより、セットした足裏と第三下肢保持部3とが離れることなく適度な弾性反力を持って当接したまま、施療者の下肢を確実に収容保持することとなる。
【0048】
(奥行き方向及び上下方向の長さの関係)
また、第一実施形態では、図9に示すように、第一下肢保持部1の奥行き方向(前後方向)の最大長さ1Lが、第二下肢保持部2の奥行き方向(前後方向)の最大長さ2L、第三下肢保持部3の奥行き方向(前後方向)の最大長さ3Lのいずれよりも小さい。また、第二下肢保持部2の奥行き方向(前後方向)の最大長さ2Lが、第三下肢保持部3の奥行き方向(前後方向)の最大長さ3Lよりも小さいものとしている。第一下肢保持部1の奥行き方向の最大長さ1Lを最も短く構成し、その内部に一対形成した第一凹部1Dの各側面に第一側部施療子41Sを配置することにより、ひざ下の筋肉ないし健の施療部分を大きく外れることなく、確実に施療することができる。また、第二下肢保持部2の奥行き方向の最大長さ2Lを第一下肢保持部1の奥行き方向の最大長さ2Lよりも長く構成し、その内部に一対形成した第二凹部2Dの各側面に第二側部施療子42Sを配置することにより、第二側部施療子42Sがふくらはぎから足首までの側部のいずれかの部分(第二下肢保持部2の可動範囲内に対応する下肢の部分)を前後方向に広く覆うように配されることとなる。また、第一実施形態では、第一下肢保持部1の上下方向(載置される脚の長手方向)の長さは、第二下肢保持部2の上下方向の長さよりも大きい。また、第一下肢保持部1の上下方向(載置される脚の長手方向)の長さは、第三下肢保持部3の上下方向の長さよりも大きい。つまり、第一下肢保持部1は、施療者のひざ下部分からふくらはぎを十分に保持する事が可能な上下方向(載置される脚の長手方向)の長さを有している。これにより、施療者のふくらはぎを第一下肢保持部1に設けられている施療子4(第一側部施療子41Sないし第一底部施療子41B)により十分に施療することができる。
【0049】
(フレーム構成)
第一実施形態のフレーム構成は、上述したように、第一下肢保持部1を支持する第一支持部材61が、角度可変可能、かつ離間・近接方向への実質的な移動ができないように、固定ピン61Pによって回転可能に座部Bの前方に軸支されてなる(図8参照)。また、第二下肢保持部2を支持する第二支持部材62が、第一支持部材61及び第三支持部材63の動作とは独立した、施療者の脚の長手方向へのスライド移動可能な構造をもって第一支持部材61の上側に支持される。また、第三下肢保持部3を支持する第三支持部材63が、第一支持部材61及び第二支持部材62の動作とは独立した、施療者の脚の長手方向へのスライド移動可能な構造をもって、第二支持部材62の上側に支持される。
【0050】
第一実施形態による第二支持部材62の第一支持部材61に対するスライド移動は、図7に示すように、第二支持部材62に固定した第二駆動源71によって駆動制御され、第三支持部材63の第二支持部材62に対するスライド移動は、第三支持部材63内に収容されて第二支持部材62と繋がれたコイルばね状の弾性支持部材65により、差し込んだ施療者の足の位置に応じて自由に弾性制御される。これにより、上述したように、弾性支持部材65によって第三支持部材63に固定されている第三下肢保持部3は弾性支持されている。
【0051】
(他のスライド移動制御例)
上記のように第一実施形態では、第二支持部材62をそれ自体に設けた第二駆動源71によって任意の駆動位置に調整されるものとし、第三支持部材63をそれ自体に設けた弾性支持部材65によって任意の弾性支持位置に弾性支持される形態を示したが、本発明はこれに限られない。本発明では、たとえば、他のスライド移動制御例として、第二支持部材62をそれ自体に設けた弾性支持部材によって任意の弾性支持位置に弾性支持されるものとし、第三支持部材63をそれ自体に設けた駆動源によって任意の駆動位置に調整されるものとしてもよい。また、弾性支持部材、駆動源それぞれの設置位置は各支持部材それ自体でなくてもよく、例えば、第二支持部材62を支持する弾性支持部材又は駆動源(第二駆動源71)を第一支持部材61或いは座部B内に備えてもよく、第三支持部材63を支持する弾性支持部材又は駆動源を第一支持部材61、第二支持部材62或いは座部B内に備えてもよい。
【0052】
(第二駆動源71)
第二駆動源71は、第二支持部材62を第一支持部材61に対して施療者の脚の長手方向にスライド移動させるように構成する。ここで、第二駆動源71によるスライド移動は、他の支持部材である第一支持部材61ないし第三支持部材63の回動ないし移動動作とは独立して行われる。より具体的には、第二駆動源71は、前記第一下肢保持部1の回動動作のための第一駆動源55及び前記第三下肢保持部3の移動動作のため弾性支持部材65と相関することのない独立した第二駆動源71をもって、前記第二下肢保持部2を、第一下肢保持部1と前記第三下肢保持部3との間の移動可能範囲内で、施療者の脚の長手方向(第一下肢保持部1と離れたり近づいたりする方向)にスライド移動させる。
【0053】
(施療子4)
施療子4は、図4及び図5に示すように、第一下肢保持部1、前記第二下肢保持部2及び前記第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする。施療子4は、前記一対の第一凹部1Dの各々の両側部にそれぞれ設けられ、施療者のふくらはぎの各側部を施療する一対の第一側部施療子41Sと、前記一対の第一凹部1Dの各々の両底部に設けられ、施療者のふくらはぎの裏部を施療する第一底部施療子41Bとを含む。これにより、第一〜第三下肢保持部1〜3によって下肢を三分割位置で確実に保持しながら、第二下肢保持部2及び第三下肢保持部3による支持及び施療とは独立して、施療者のひざ下近傍、ふくらはぎの側部及び裏部を確実に施療することができる。
【0054】
また、第一実施形態では、前記一対の第一側部施療子41Sは、それぞれ、空気が流入又は排出されることにより膨縮可能な第一側部膨縮袋410Sである。また、前記第一底部施療子41Bは、空気が流入又は排出されることにより膨縮可能な第一底部膨縮袋410Bである。具体的には、一対の第一側部施療子41S及び第一底部施療子41Bは、それぞれ、空気膨縮袋たるエアバッグで構成されており、エアーの給排気機構(図示せず)によって、それぞれ互いに独立して膨張収縮可能としている。すなわち、これら第一側部膨縮袋410Sと第一底部膨縮袋410Bとは、互いに独立して膨縮可能である。また、第一実施形態では、前記第一底部施療子41Bは、前記第一凹部1Dを構成する底面に対応する位置で上下方向に並設された複数(2つ)の第一底部膨縮袋410Bである。そして、これら並設された複数の第一底部膨縮袋410Bは、それぞれ、互いに独立して膨張収縮可能である。つまり、第一側部膨縮袋410S及び上下一対の第一底部膨縮袋410Bは、それぞれ、互いに独立して膨張収縮可能である。また、第一底部膨縮袋410Bは、それぞれ、左右一対形成された第一凹部1Dのそれぞれの底部に取り付けるための取り付け端部が側方へ張り出し形成されており、この取り付け端部が第一下肢保持部1の幅方向の内側(中央突壁12)寄りの位置にて、差し込みピン4Pによって回動可能に固定される。
【0055】
また、施療子4は、前記一対の第二凹部2Dの各々の両側部にそれぞれ設けられ、施療者の足首からふくらはぎの間の各側部を施療する一対の第二側部施療子42Sを含む。また、一対の第二側部施療子42Sは、空気が流入又は排出されることにより膨張収縮可能な第二側部膨縮袋420Sである。
【0056】
また、施療子4は、前記一対の第三凹部3Dの各々の両側部にそれぞれ設けられ、施療者の足の甲近傍を施療する一対の第三側部施療子43Sと、前記一対の第三凹部3Dの各々の両底部に設けられ、施療者の足裏部を施療する第三底部施療子44を含む。一対の第三側部施療子43Sは、空気が流入又は排出されることにより膨張収縮可能な第三側部膨縮袋430Sである。また、第三底部施療子44は、球冠状の突起体によって構成している(図4、図5参照)。また、前記第三底部施療子44は、前記第三凹部3Dを構成する底面下に設けられた第三底部膨縮袋430Bが膨張収縮することにより、膨張収縮するストローク分上下方向に移動する。そして、これら並設された第三側部膨縮袋430Sと第三底部膨縮袋430Bとは、それぞれ、互いに独立して膨張収縮可能とすることができる。
【0057】
ここで、第二側部膨縮袋420Sは、他の残りの施療子よりも柔らかい織布構成材で構成され、ふくらはぎから足首までの範囲を比較的やわらかく包み込むように施療することができる。具体的には、第一側部膨縮袋410S、第一底部膨縮袋410B、第三側部膨縮袋430S、第三底部膨縮袋430Bのそれぞれを、空気の流出入の迅速性に優れたブロー成型材で構成し、第二側部膨縮袋420Sのみを、織布構成材を主材とした溶着成形材で構成している。この溶着成形材で構成した第二側部膨縮袋420Sは、図15(a)及び(b)に示すように、膨出状態で円柱状に立体的に膨らみ、施療者の足の側部を前後にわたって包み込むことができる。
【0058】
(第一下肢保持部1の支持構成)
第一下肢保持部1は、図2に示すように、座B1の前方にて、座B1の前方に設けられた支持軸たる固定ピン61P周りに回動可能に支持される。この固定ピン61Pは、座部Bの前方へ突出した座フレームBFを略水平に貫通してなり、第一下肢保持部1を支持する左右一対の第一支持部61の各上端付近を、座フレームBFの固定軸周りに軸支する(図2)。この軸支によって、施療者の脚の長手方向への実質的なスライド移動を伴うことなく第一下肢保持部1を回動させることが可能である。なお、施療者の脚の長手方向への実質的なスライド移動を伴うものでなければ、第一下肢保持部61の回動の際に多少の回動軸のズレを伴うものであってもよい。例えば、両端付近に2軸連結されたアームを介した移動軸構造によって第一支持部材61を連結支持したものであったり、多少のアソビを有する摺動軸受を介して軸位置の多少のずれを伴う構造によって第一支持部材61を連結支持したものであったりしてもよい。
【0059】
また、図3に示すように、座部Bは座B1の下部に収容空間を有しており、第一支持部材61の回動角度は、この収容空間内に設けられた伸縮アームによって駆動制御される。具体的には、座B1の収容空間には、第一駆動源55であるモーターの駆動によって前方へ伸縮する伸縮アームが左右一対に設けられ、伸縮アームの先端が座B1より前方へ突出入可能となっている。
【0060】
(伸縮アーム)
具体的には、伸縮アームは、収容空間内にて前方へ向かって上方傾斜するように配置された第一アーム51と、第一アーム51の伸長方向に沿って前後にスライド移動可能な第二アーム52と、第二アーム52の先端部に一端が軸支されると共にこの軸支位置よりも上方の支持軸53Aにて他端が軸支された第三アーム53と、第三アーム53の先端部に自由回転可能に設けられ、第一下肢保持部1(第一支持部材61)の背面に設けられたローラー受け部61A上を転動するローラー54Rとから構成される。
【0061】
第一アーム51は、第二アーム52を枠持するためのスライド枠を有して伸長する棒状の固定配置材であり、第一アーム51の先部近傍には、第二アーム52を伸縮駆動させる第一駆動源55たるモーター、及び、第二アーム52の伸縮を検知するセンサ5Sが固定される。
【0062】
第二アーム52は、第一アーム51のスライド枠によって、アームの伸縮方向へスライド移動可能に枠持される。また、第二アーム52には、移動量検知用の多数の小孔52Hが伸長方向に沿って側面に連続形成されたセンシング枠52Aが第二アーム52の上辺に沿って固定されている。このセンシング枠52Aは、第二アーム52のアーム伸縮方向へのスライド移動に伴って第二アーム52と共に移動する。このとき、センサ5Sの検知部が、移動するセンシング枠52Aの小孔52Hを跨いで相対移動する形となり、かかる相対移動によって小孔52Hの通過を検出する。この小孔52Hのセンサ5Sへの通過に基づいて移動量を認識し、足載せ部O(厳密には第一支持部61)の回動を制御することが可能となる(図3参照)。
【0063】
(フレーム構造のより詳細な構造)
(第一フレーム構造)
第一実施形態では、図6及び図7に示すように、第一下肢保持部1を支持する第一フレーム構造が、板金により形成された第一支持部材61と、第一支持部材61の中央位置及び下端位置にて左右方向に延びる中空棒状(図8参照)の中央連結フレーム6F、及び中空棒状(図8参照)の下部連結フレーム60Fとによって構成される。第一支持部材61は、左右方向の中央部分の第一プレート部60Aと、第一プレート部60Aの左右の両端側に曲げ加工により段差形成された側部60Bとにより構成されている。この第一支持部材61の側部60Bを接続する中央連結フレーム6F、下部連結フレーム60F及び第一プレート部60Aによって、第一フレーム構造の捩じれ変形を抑制している。また、側部60Bは、第一プレート部60Aよりも前方(上述した側壁11の先端側)に向かって突出した位置に位置するように段差形成されている。これにより、第一プレート部60Aと第一下肢保持部1の裏面側との間に空間を設けることができるので、第一プレート部60Aと第一下肢保持部1の裏面側との間の空間に部材などを配置することが可能となる。
【0064】
第一フレーム構造において、図6に示すように、第一プレート部60上の左右近傍位置には、それぞれ、第二支持部材62及び第三支持部材63を保持摺動するための複数の転動ローラー73が自由転動可能に枠保持される。転動ローラー73は、第一プレート部60の上方において並行に支持された2軸それぞれの内側と外側に2輪ずつ、計4輪が枠保持される。このうち内側の2輪の転動ローラー73と第一プレート部60との間に第二支持部材62を挟み込むように設けて、この第二支持部材62を、施療者の脚の長手方向へスライド可能に支持する。また、外側の転動ローラーの2輪の転動ローラー73と第一プレート部60との間に第三支持部材63を挟み込むように設けて、この第三支持部材63を、施療者の脚の長手方向へスライド可能に支持する(図6、図8参照)。
【0065】
また、中央連結フレーム6Fの裏面側には、プレート状のローラー受け部61Aが固設される。このローラー受け部61Aは、背面側に、前記伸縮アームのローラー54Rが転動するための平坦面を有ししており、伸縮アームが伸縮したとき、伸縮アーム先端のローラー54R(図3参照)がこの平坦面上を転動するものとなっている。
【0066】
第一支持部材61は、各側部60Bの上部が、座B1の左右下部に一対設けられた断面コ字状の座フレームBF内に嵌み込まれ、座フレームBF及び第一支持部材61の各側部60Bを共挿通する固定ピン61Pによって座フレームBFに対して回動可能に支持される。また、第一支持部材61の各側部60Bには、それぞれ、複数の固定孔61Hが設けられ、これら固定孔61Hにて、第一下肢保持部1が、第一支持部材61にネジ止め固定される。
【0067】
(第二フレーム構造)
また、第一実施形態では、図6に示すように、第二下肢保持部2を支持する第二フレーム構造は、並行配置された左右一対の中空丸棒状の第二支持部材62と、第二支持部材62の基端位置及び先端位置にて左右の第二支持部材62間を亘る細板状の上下一対の連結フレーム7Fとによって四方枠状に組み枠構成される。平面視上下の連結フレーム7F間であって幅方向略中央位置には、第二支持部材62間距離よりも小幅の板状の第二プレート70が設けられている。この第二プレート70上には、第二支持部材62を第一支持部材61に対して駆動させる第二駆動源71及び駆動構造の一部が固定される(図6、図7)。各第二支持部材62及び下の連結フレーム7Fには、複数の固定孔62Hが設けられ、これら固定孔62Hにて、第二下肢保持部2が、左右の第二支持部材62を跨ぐ態様で第二支持部材62の表面側にネジ止め固定される。
【0068】
(駆動構造)
第二フレーム構造の第二プレート70上には、第二駆動源71たるモーターと、この第二駆動源71によって第二フレーム構造(第二支持部材62)自体を第一フレーム構造(第一支持部材61)に対して施療者の脚の長手方向にスライド駆動させる駆動構造とが設けられる。第二駆動源71たるモーターは、第二プレート70の法線方向を向くウォーム軸71Wを駆動回転させるものであり、駆動構造の一部であって、前記ウォーム軸71Wと直角噛合したウォーム歯車7Nを回転させる。
【0069】
駆動構造は、第二フレーム構造(第二支持部材62)のスライド移動方向に伸長して軸回転可能に設けられた駆動ネジ7Sと、第一フレーム構造の連結フレーム6F内に内ネジを有して貫通形成された駆動孔66とからなり、前記駆動孔66内を前記駆動ネジ7Sが螺合して構成される。駆動ネジ7Sは、第二プレート70のプレート面と並行し、その伸長軸周りには雄ネジが形成されると共に、その先部には、周方向へ張り出す円盤歯車状のウォーム歯車7Nが同軸形成される。ウォーム歯車7Nは、駆動ネジ7Sの先部にて駆動ネジ7Sと共に同軸回転する。このウォーム歯車7Nは、第二駆動源71の先に設けられたウォーム軸71Wと噛合しており、第二駆動源71から伝達された駆動回転力は、ウォーム軸71Wからウォーム歯車7Nへ伝達され、駆動ネジ7Sの回転力に変換される。これにより、駆動孔66が駆動ネジ7Sに対して相対的に移動され、駆動ネジ7Sが取り付けられている第二フレーム構造(第二支持部材62)が駆動孔66が設けられている第一フレーム構造(第一支持部材61)に対してスライド移動することが可能となる。
【0070】
(検知器74)
また、第一フレーム構造の下部連結フレーム60F上には、第二フレーム構造(第二支持部材62)の第一フレーム構造(第一支持部材61)に対する相対位置を検知する検知器74が固定される。第一フレーム構造(第一支持部材61)に支持された第二フレーム構造(第二支持部材62)が施療者の脚の長手方向へスライド移動したとき、第二プレート70に設けられ、多数の小孔72Hが連続形成されたセンシング枠72が検知器74上をスライド移動することで、検知器74はその上を跨ぐ小孔72Hの通過を検出する。小孔72Hの通過に基づいて、第二フレーム構造(第二支持部材62)との相対移動量を認識し、これによって第一フレーム構造(第一支持部材61)に対する第二フレーム構造(第二支持部材62)の伸長量を制御することが可能となる(図5、図7)。
【0071】
(第三フレーム構造)
また、第一実施形態による第三下肢保持部3を支持する第三フレーム構造は、図8に示すように、側面視略L字状に屈曲成形され、略L字状の上端が上方を向き且つ屈曲先部が前方を向くように並行配置された左右一対の棒状の第三支持部材63(図8)と、第三支持部材63の前記前方を向いた先端位置にて左右の第三支持部材63間を亘る細板状の連結フレーム64とによって三方枠状に組み枠構成される(図6)。これら第三支持部材63と連結フレーム64とは、一体的に形成されている。また、連結フレーム64には、複数の固定孔64Hが設けられ、これら固定孔64Hにて、第三下肢保持部3が、左右の第三支持部材63を跨ぐ態様で連結フレーム64の上面側にネジ止め固定される。また、略L字状の左右それぞれの第三支持部材63において、屈曲部よりも上部から上端の直線状の伸長部内には、コイルばねからなる弾性支持部材65がその伸長方向に沿って収容される。弾性支持部材65の下端は、フック状に成形され、第三支持部材63の屈曲部付近を挿通する固定ピン63Pによって固定される。一方、弾性支持部材65の上端もまたフック状に成形され、第二支持部材62の上端を繋ぐ連結フレーム7Fの左右両端近傍に設けた固定孔70H内に掛止固定される(図6、図7、図8)。これにより、第三フレーム構造は左右それぞれに収容した弾性支持部材65によって、第二フレーム構造に弾性支持される。
【0072】
(使用方法例)
上述した第一実施形態の椅子式マッサージ機は、例えば、図10に示す第一の使用状態、例えば図11に示す第二の使用状態、図12に示す第三の使用状態のいずれかに示す使用方法によって使用することができる。特に、第一実施形態では、第一下肢保持部1によってひざ下近傍からふくらはぎ上半部に到る比較的広い範囲の部分を、ふくらはぎ上半部用に配置された第一膨縮袋(410S,410B)によって他の膨縮袋とは独立して集中施療することが可能である。また、第一実施形態では、第三下肢保持部3内の足の甲用に配置された第三側部膨縮袋430Sによって、足の甲の両側を覆うようにして押圧保持又は指圧刺激しながら足裏に当接した足裏施療子44を底部第三膨縮袋430Bの膨縮によって断続又は連続刺激し、他の下肢保持部の膨縮袋とは独立して集中施療することが可能である。
【0073】
しかして第一実施形態では、第二下肢保持部2内の足のふくらはぎ下半部ないしくるぶし用に配置された第二側部膨縮袋420Sによって、足の両側を覆うようにして押圧保持又は指圧刺激しながら移動施療し、他の下肢保持部の膨縮袋と併せて(同時に又は時間をずらして順次)独立して集中施療することが可能である。
【0074】
(第一の使用状態)
図10に示す第一の使用状態は、先ず、第一下肢保持部1と第二下肢保持部2を最上端の収納位置に配置したまま、第一凹部1D、第二凹部2D、第三凹部3Dへ下肢を収容し、ひざ裏を第一下肢保持部1の上端に合わせることで、弾性支持部材65に支持された第三支持部材63のスライド移動によって、第三下肢保持部3のみを脚の長手方向先方(足先方向)へスライド移動させ、施療者の下肢を、任意の回動角度(約45度)かつその回動角度における脚の長さに合わせた適切な長さへの調節を終えた状態でセットする(図10a)。このとき、第一下肢保持部1下端と第三下肢保持部3上端の脚の長手方向距離はその状態の施療者の下肢に適切な第一下肢長L1にセットされる。このセット動作(図10a)では第一下肢保持部1及び第二下肢保持部2が静止状態S1のまま、第三下肢保持部3のみが長手方向足先方向(第一下肢保持部1とは反対側方向)へスライド移動する移動状態S2となる。
【0075】
次に、このセットした状態のまま、第二駆動源71によって第二下肢保持部2のみを脚の長手方向に沿ってスライド移動させ、これと共に、各下肢保持部に設けられた施療子4によって下肢の各位置への施療を行う(図10b)。このとき、第一下肢保持部1下端と第三下肢保持部3上端の脚の長手方向距離はその状態の施療者の脚の長さに適切な第一下肢長L1にセットされたままであり、第二下肢保持部2は、この第一下肢長L1の範囲内でのみスライド移動する。ここで、第二下肢保持部2の第二凹部2D内の各面に対応するように設けられた第二側部施療子42Sたる左右の第二側部膨縮袋420Sは、図示しない空気供給機構によって袋内に空気が充填された膨張状態となり、この膨張状態のままスライド移動する。このスライド移動によって、施療者のふくらはぎ及び足首の側面を押圧刺激しながら擦動する、いわゆる擦り施療を行ったり、或いは施療者のふくらはぎの側面を強く押圧固定しながら押動させ或いは引動させる、いわゆる伸縮施療を行ったりすることができる。
【0076】
(第二の使用状態)
図11に示す第二の使用状態は、先ず、第一下肢保持部1のみを最上端の収納位置に配置したまま、第一凹部1D、第二凹部2D、第三凹部3Dへ下肢を収容し、ふくらはぎを第一下肢保持部1の上端に合わせることで、第一支持部材61に対してスライド可能に支持された第二支持部材62のスライド移動によって、第二下肢保持部2及び第三下肢保持部3を、互いの距離を最短にした収納状態のまま脚の長手方向先方(足先方向)の途中位置までスライド移動させ、施療者の下肢のうち略下半部を、任意の回動角度(たとえば、約45度)かつその回動角度における脚の長さよりも短い長さとして調節を終えた状態でセットする(図11a)。このとき、第一下肢保持部1下端と第二下肢保持部2上端の下肢上半部の長手方向距離はその状態の施療者のひざが、第一下肢保持部1よりも上方へ浮いた第二上半下肢長L21にセットされる。このセット動作(図11a)では、第一下肢保持部1が静止状態のまま、第二下肢保持部2及び第三下肢保持部3が共に同移動量だけスライド移動する移動状態S2となる。
【0077】
次に、このセットした状態のまま、弾性支持部材65によって、第三下肢保持部3のみを脚の長手方向に沿ってスライド移動させ、これと共に、各下肢保持部に設けられた施療子4によって下肢の各位置への施療を行う(図11b)。このとき、第一下肢保持部1下端と第二下肢保持部2上端と間の脚の長手方向距離は、その状態の施療者の下肢に適切な第二上半下肢長L21にセットされたままであり、第三下肢保持部3は、この第二上半下肢長L21よりも先の第二下半下肢領域L22でのみ足載せ部Oに配置された脚の長手方向にスライド移動する。ここで、第一下肢保持部1の第一凹部1D内の各面に設けられた第一側部施療子41Sたる左右の第一側部膨縮袋410S、及び第一底部施療子41Bたる第一底部膨縮袋410B、並びに/或いは、第二下肢保持部2の第二凹部2D内の各面に設けられた第二側部施療子42Sたる左右の第二側部膨縮袋420Sは、それぞれ、図示しない流体供給機構によって袋内に空気が充填された膨張状態となり、かつ、第三下肢保持部3の両側部に設けられた第三側部施療子43Sたる第三側部膨縮袋430Sが膨張状態となったまま、第三下肢保持部3のみが脚の長手方向に沿ってスライド移動する。このスライド移動によって、施療者のふくらはぎの側面を押圧刺激しながら足先を押動させ或いは引動させることで、いわゆる脚全体の伸長方向に対する伸縮施療やふくらはぎへの擦動による擦り施療を行ったりすることができる。
【0078】
(第三の使用状態)
図12に示す第三の使用状態は、先ず、第一下肢保持部1のみを最上端の収納位置に配置したまま、第一凹部1D、第二凹部2D、第三凹部3Dへ下肢を収容し、ひざ裏を第一下肢保持部1の上端に合わせることで、第一支持部材61に対してスライド可能に支持された第二支持部材62のスライド移動によって、第二下肢保持部2及び第三下肢保持部3を、互いの距離を最短にした収納状態のまま脚の長手方向先方(足先方向)へスライド移動させ、施療者の下肢を、任意の回動角度(たとえば、約45度)かつその回動角度における下肢の長さにあった長さとして調節を終えた状態でセットする(図12a)。このとき、第一下肢保持部1下端と第三下肢保持部3上端の脚の長手方向距離はその状態の施療者の下肢に適切な第一下肢長L1にセットされ、かつ、第一下肢保持部1下端と第二下肢保持部2上端の下肢上半部の長手方向距離はその状態の施療者の下肢が収容された第二上半下肢長L21’にセットされる。このセット動作(図12a)では第一下肢保持部1が静止状態のまま、第二下肢保持部2及び第三下肢保持部3が共に同移動量だけ長手方向足先方向(第一下肢保持部1とは反対側方向)へスライド移動する移動状態S2となる。
【0079】
次に、このセットした状態のまま、第二駆動源71によって、第二下肢保持部2のみを脚の長手方向に沿ってスライド移動させ、これと共に、各下肢保持部に設けられた施療子4によって下肢の各位置への施療を行う(図12b)。このとき、第一下肢保持部1下端と第三下肢保持部3上端の脚の長手方向距離はその状態の施療者の脚の長さに適切な第一下肢長L1にセットされたままであり、第二下肢保持部2はこの第一下肢長L1の範囲内でのみスライド移動する。ここで、第二下肢保持部2の第二凹部2D内の各面に設けられた第二側部施療子42Sたる左右の第二側部膨縮袋420Sは、図示しない流体供給機構によって袋内に空気が充填された膨張状態となり、この膨張状態のままスライド移動する。このスライド移動によって、施療者のふくらはぎ及び足首の側面を押圧刺激しながら擦動する、いわゆる擦り施療を行ったり、或いは施療者のふくらはぎの側面を強く押圧固定しながら押動させ或いは引動させる、いわゆる伸縮施療を行ったりすることができる。この施療動作(図12b)では、第一下肢保持部1及び第三下肢保持部3が静止状態S1のまま、第二下肢保持部2のみがスライド移動する移動状態S2となる。このとき、第三支持部材63を支持する弾性支持部材65の弾性反力によって、第二下肢保持部2の施療位置に応じた足裏への第三下肢保持部3の当接力が調整される。なお、別の施療動作として、第二下肢保持部2のみがスライド移動したとき、第三支持部材63を支持する弾性支持部材65の弾性反力によって、第三下肢保持部3の位置が僅かに足載せ部Oに配置された脚の長手方向に向かってスライド移動してもよい。
【0080】
上記のように、第一実施形態では、第二下肢保持部2は、第二駆動源71を駆動させることにより、施療者の所望する位置に移動することが可能なように構成されている。また、第三下肢保持部3は、弾性支持部材65を伸縮させることにより、施療者の所望する位置に移動することが可能なように構成されている。たとえば、施療者の脚の長さが大きく、第一下肢保持部1ではふくらはぎの下部が十分に保持することができない場合には、第二下肢保持部2を第一下肢保持部1側にスライド移動させることにより、ふくらはぎの下部も第二下肢保持部2の施療子4により十分にマッサージすることが可能である。また、ふくらはぎの下部をマッサージするよりも、足首近傍を十分にマッサージしたい場合には、第二下肢保持部2を第三下肢保持部3側にスライド移動させることにより、 足首近傍も第二下肢保持部2の施療子4により十分にマッサージすることが可能である。
【0081】
(第一実施形態の作用効果)
以下、上述の第一実施形態の構成における作用効果を説明する。
第一実施形態の椅子式マッサージ機においては、第二下肢保持部2が第一下肢保持部1に対して施療者の脚の長手方向にスライド移動可能な構成を有し、かつ、第三下肢保持部3もまた第一下肢保持部1に対して施療者の脚の長手方向にスライド移動可能な構成を有している。そして、第二下肢保持部2と第三下肢保持部3とは、それぞれ、互いに独立してスライド移動可能となっている。このように、第二下肢保持部2と第三下肢保持部3のそれぞれを、必ずしも連動せず別個にスライド移動可能とすることで、3つの脚保持部材をそれぞれ任意のスライド移動位置、すなわち、施療者の所望する位置に独立配置することが可能となっている。その結果、第二下肢保持部2及び第三下肢保持部3に配置されている施療子4により、施療者の所望する位置を十分にマッサージすることができる。
【0082】
また、第一実施形態では、上記のように、前記第一下肢保持部1及び前記第三下肢保持部3とは独立して、前記第二下肢保持部2を施療者の脚の長手方向へスライド移動させるための第二駆動源71を設けることによって、第三下肢保持部3を所定のスライド位置に配置し、第一下肢保持部1及び第三下肢保持部3のスライド位置を、施療者の下肢長に適した距離を開けて固定したセット状態のまま、第二駆動源71を駆動することにより、第二下肢保持部2のみを施療者の脚の長手方向へスライド移動させることができる(図10参照)。これにより、第一下肢保持部1、第三下肢保持部3のそれぞれによる施療マッサージを行いながら、さらにその間の範囲内の任意の位置で第二下肢保持部2による施療マッサージを行うことが可能となっている。
【0083】
また、第一実施形態では、上記のように、椅子式マッサージ機は、前記第一下肢保持部1を支持し、前記座部Bの前方に回動可能に設けられた第一支持部材61と、前記第二下肢保持部2を支持し、前記第一支持部材61に対して施療者の脚の長手方向にスライド移動可能な第二支持部材62とを備え、前記第二駆動源71は、前記第二支持部材62を前記第一支持部材61に対して施療者の脚の長手方向にスライド移動させるように構成するものとなっている。これにより、図6に示すように、第一支持部材61と、第一支持部材61に対してスライド移動可能に取り付けられる第二支持部材62とから構成された支持部材を使用して第一下肢保持部1及び第二下肢保持部2を取り付けることで、比較的簡易な支持機構によって、第一支持部材61と共に第二支持部材62を確実に回動させ、第二支持部材62のみを第一支持部材61に対して確実にスライド移動させることができる。また、シンプルな支持機構の構成とすることで、強固な支持機構を構成することも可能となっている。
【0084】
また、第一実施形態では、上記のように、前記第一下肢保持部1は、前記座部Bに対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さないものとなっている。第一実施形態の第一下肢保持部1は、座部Bに対して回動角度の調節のみが可能な支持構造を有した第一支持部材61によって支持され、この支持構造による回動角度の調節時に、脚の長手方向位置の実質的な移動調節を伴うことがない。このため、第一下肢保持部1の回動角度調節に伴う施療者の各下肢角度において、施療者のひざ下近傍の足のつぼや筋肉を的確に刺激することができる。すなわち、この構成は、前記第一下肢保持部1が、前記座部Bに対し、前記施療者の脚の長手方向への実質的なスライド移動を伴うことなく回動するように支持されていることを意味する。上記「脚の長手方向位置の実質的な移動調節」或いは「脚の長手方向への実質的なスライド移動」とは、施療者のひざ下の近傍から足先へ向かう部分の施療位置がずれることを意味しており、上記構成は、第一下肢保持部1の回動角度を調節可能であると共に、回動動作に伴って施療者のひざ下から足先へ向かう部分の施療位置が脚の長手方向で変わることがない構成を特定する。ただし、回動機構によっては、ガタつきや機構上の遊び、或いは弾性材を介した弾性移動等によって、脚の長手方向への多少の移動を伴う場合がある。つまり、上記「前記施療者の脚の長手方向への実質的なスライド移動を伴うことなく」とは、施療位置のずれを伴わない程度での前記脚の長手方向への多少の移動を許容する意味である。
【0085】
また、第一実施形態では、上記のように、椅子式マッサージ機は、前記座部B、第一下肢保持部1又は第二下肢保持部2の少なくともいずれかと、前記第三下肢保持部3との間に、第三下肢保持部3を弾性支持する弾性支持部材65をさらに備える。そして第三下肢保持部3は、施療者の足裏を当接させて足を収容する足収容部3Dを有し、前記足収容部3Dに施療者の足を収容して前記足載せ部Oに施療者の下肢をセットすることにより、前記第三下肢保持部3がスライド移動し、前記弾性支持部材65は、第三下肢保持部3のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置において、第三下肢保持部3を、上向きの弾性反力が生じた状態で弾性支持するように構成されている。この構成によれば、弾性支持部材65によって第三下肢保持部3を弾性支持しており、施療者の足を第三下肢保持部3内へセットすることでこの弾性支持位置が弾性反力により可変し、このとき足収容部3D内に収容した施療者の足裏に、弾性反力による第三下肢保持部3からの面圧がかかることとなる。これにより、セットした足裏と第三下肢保持部3とが離れることなく適度な弾性反力を持って当接したまま、施療者の下肢(足裏)を確実に収容保持することとなり、より的確な位置に施療子を調節することが可能となっている。
【0086】
なお、前記弾性支持部材65はさらに、前記第三下肢保持部3を前記第一下肢保持部1側へ付勢させるものであり、非使用時に第三下肢保持部3が第一下肢保持部1側に近接移動するものとしてもよい。このように、足載せ部Oの全長を縮める方向へ自動付勢させることで、非使用時にコンパクトな収納形態を維持することができる。
【0087】
また、第一実施形態では、上記のように、椅子式マッサージ機は、座部Bと、前記座部Bの前方に回動可能に設けられた第一下肢保持部1と、前記第一下肢保持部1に隣接するように設けられた第二下肢保持部2と、前記第二下肢保持部2の前記第一下肢保持部1とは反対側に隣接するように設けられた第三下肢保持部3と、前記第一下肢保持部1、前記第二下肢保持部2及び前記第三下肢保持部3にそれぞれ設けられ、施療者の下肢をマッサージする施療子4とを含む足載せ部Oと、前記第一下肢保持部1と前記第三下肢保持部3との間の移動可能範囲内で、前記第一下肢保持部1の移動又は回動動作、及び、前記第三下肢保持部3の移動又は回動動作のそれぞれとは独立して、前記第二下肢保持部2を施療者の脚の長手方向にスライド移動させるための第二駆動源71とを備えることを特徴とする。ここで、上記背景技術において列挙したような従来のリンク機構を有するマッサージ機では、足先側の脚保持部材の押し当て面が押し出された場合に、リンク機構により、3つの脚保持部材(下肢保持部)をそれぞれ予め定められた位置に配置する構成である。このため、特に、脚の根元側の施療部位に対応する脚保持部材(下肢保持部)と、脚の根元側の施療部位に対応する脚保持部材に隣接する脚保持部材との位置が施療者の所望するマッサージ位置とずれた位置に配置される場合があるという問題点があった。これに対して上記構成によれば、第一下肢保持部1と第三下肢保持部3との間で、第一下肢保持部1及び第三下肢保持部3とは独立して第二下肢保持部2を施療者の脚の長手方向にスライド移動させるための第二駆動源71を設けることによって、上記背景技術のマッサージ機のように3つの下肢保持部がリンク機構により連動して予め定められた位置に移動する構成とは異なり、第二駆動源71を駆動することにより、第一下肢保持部1及び第三下肢保持部3とは独立して第二下肢保持部2を施療者の所望する部位に移動させることができる。これにより、下肢保持部の位置が施療者の所望するマッサージ位置とずれた位置に配置されることを抑制することができる。
【0088】
すなわち、第二駆動源71により、第一下肢保持部1の回動及び前記第三下肢保持部3の移動又は回動動作とは独立させたまま、第二下肢保持部2のみをスライド移動させることで、例えば、脚の長さを施療者に適した長さに合わせたまま、第二下肢保持部2による施療位置を、独立した第二駆動源71によって容易に調節できるものとなる。
【0089】
また、第一実施形態では、上記のように、施療子4は、一対の第一凹部1Dの各々の両側部にそれぞれ設けられ、施療者のひざ下からふくらはぎの各側部を施療する一対の第一側部施療子41Sと、一対の第一凹部1Dの各々の両底部に設けられ、施療者のひざ下からふくらはぎの裏部を施療する第一底部施療子41Bと、を含む。また、前記第二下肢保持部2及び第三下肢保持部3は、それぞれ互いに独立して、前記第一下肢保持部1に対し施療者の脚の長手方向にスライド移動可能に構成されている。このように第二下肢保持部2と第三下肢保持部3とのそれぞれを、互いに独立して、第一下肢保持部1に対し施療者の脚の長手方向にスライド移動可能とすることによって、第二下肢保持部2及び第三下肢保持部3をそれぞれ任意のスライド移動位置、すなわち、施療者の所望する位置に独立配置することができる。その結果、施療者の所望するマッサージ位置にて、より的確な施療を行うことが可能となる。また、第一実施形態の椅子式マッサージ機は、第一ないし第三下肢保持部1〜3によって下肢を三分割位置で確実に保持しながら、第一〜第三下肢保持部1〜3による支持及び施療とは独立して、施療者のふくらはぎの側部及び裏部の施療を行うことができるものとなっている。
【0090】
なお、前記背景技術において列挙したような従来のマッサージ機のうち、施療者の左右脚をまとめて配置する構成の足載せ部を有したものは、施療者の左右のふくらはぎそれぞれの両側部を保持して十分にマッサージすることができず、また、施療者の左右脚の各々を挟みこむことができないため安定して保持することができないという不都合があった。このため、例えば脚を収容する凹部内のエアバッグが膨張したときに、凹部内に収容した使用者の脚が凹部の解放側へ押し出され、施療者の脚の両側面や裏面を十分にマッサージすることができない場合が生じるといった課題を有していた。また、前記従来のマッサージ機のうち、施療者の左右脚それぞれを挟むようにエアバッグが配置されたものでは、脚の裏面側に対応するエアバッグが設けられてないため、施療者の各々の脚を十分にマッサージすることができないといった課題を有していた。これに対し、上記構成における第一ないし第三下肢保持部1〜3によって、下肢を三分割位置で確実に保持した最上部にて、第一側部施療子41Sと第一底部施療子41Bとによって、各々の脚のふくらはぎの裏側と両側部を同時に又は順次に、或いは交互に施療することが可能となり、施療者の各々の脚を十分にマッサージすることができるものとなっている。
【0091】
また、第一実施形態では、上記のように、前記第二下肢保持部2は、施療者の両足それぞれの足首からふくらはぎの間の部分を配置可能な一対の第二凹部2Dを含み、前記施療子4は、前記一対の第二凹部2Dの各々の両側部にそれぞれ設けられ、施療者の足首からふくらはぎの間の各側部を施療する一対の第二側部施療子42Sを含むものとなっている。上記構成によれば、前記第一凹部1Dによるひざの下部近傍の支持部分の直下にて、各々の脚のふくらはぎから足首の間の部分を、一対の第二凹部2D内へ収容することとなる。これにより、施療者の脚の下肢の角度を所定のものに保ったまま両下肢を確実に保持することができる。また、前記第一下肢保持部1による施療に加えて第二下肢保持部2でも施療を行うことで、第一側部施療子41S及び第一底部施療子41Bとによる、下肢を三分割保持した最上部の施療に加え、各々の脚のふくらはぎから足首の間の範囲における両側部を同時に又は順次に、或いは交互に施療することが可能となり、施療者の各々の下肢を広範囲に分散した位置で、より十分にマッサージすることができるものとなっている。
【0092】
また、第一実施形態では、上記のように、前記一対の第一側部施療子41Sは、それぞれ、空気が流入又は排出されることにより膨縮可能な第一側部膨縮袋410Sであり、前記第一底部施療子41Bは、空気が流入又は排出されることにより膨縮可能な第一底部膨縮袋410Bであり、これら第一側部膨縮袋410Sと第一底部膨縮袋410Bとは、互いに独立して膨縮可能であるものとなっている。互いに相関することなく独立して膨縮し得る膨縮袋を側部、底部それぞれに設けることで、側部の膨縮施療と底部のいずれか又は双方の膨縮施療をそれぞれ独自のタイミングで別個に、或いは任意のタイミングで組み合せて行うことができ、より十分なマッサージ効果を得ることが可能となっている。
【0093】
また、第一実施形態では、上記のように、前記第一底部施療子41Bは、前記第一凹部1Dを構成する各底面に対応する位置で上下方向に並設された複数の第一底部膨縮袋410Bを含み、これら並設された第一底部膨縮袋410Bは、それぞれ、互いに独立して膨張収縮可能であるものとなっている。このように構成すれば、底面に対応する上下の膨縮施療をそれぞれ独自のタイミングで別個に、或いは任意のタイミングで組み合せて行うことができ、より十分なマッサージ効果を得ることが可能となっている。
【0094】
(第二実施形態)
図13に示す第二実施形態の椅子式マッサージ機は、前記第一実施形態の椅子式マッサージ機とは、第二下肢保持部の奥行き方向の長さの点で異なっており、他の基本構成、構造、動作及び効果は第一実施形態と同様である。以下、第一実施形態との相違点を中心に説明する。
【0095】
第二実施形態では、図13に示すように、第二下肢保持部2の奥行き方向(前後方向)の最大長さ2Lが、第一下肢保持部1の奥行き方向(前後方向)の最大長さ1L、第三下肢保持部3の奥行き方向(前後方向)の最大長さ3Lのいずれよりも小さいものとしている。また、第一下肢保持部1の奥行き方向(前後方向)の最大長さ1Lが、第三下肢保持部3の奥行き方向(前後方向)の最大長さ3Lよりも小さいものとしている。第二下肢保持部2の奥行き方向の最大長さ2Lを短く構成し、その内部に一対形成した第二凹部2Dの各側面に第二側部施療子42Sを配置することで、くるぶし、ふくらはぎ下の足首神経といった小範囲の施療部分を大きく外れることなく、ピンポイントで集中的に施療することができる。また、第二側部施療子42が足首の側部よりも後方の範囲内にのみ配されることとなり、他の箇所と比較して細い足首の形状に対応した適度な施療を可能としている。
【0096】
(他の実施形態例(変形例))
本発明は、上述した第一実施形態及び第二実施形態に限定されることなく、本発明の趣旨を逸脱しない範囲で種々の変更又は変形が可能である。第一実施形態及び第二実施形態では、第一下肢保持部1の第一凹部1Dの側面に対応する位置に左右一対の第一側部膨縮袋410Sを配置し、底面に対応する位置に第一底部膨縮袋410Bを上下に分割して並設した例(図14(a))について示したが、本発明はこれに限られない。本発明では、例えば、図14(b)に示すように、第一凹部1Dの側面に対応する位置に左右一対の第一側部膨縮袋410Sを上下に分割して並設してもよいし、底面に対応する位置に第一底部膨縮袋410Bを1つのみ設けてもよい。つまり、ふくらはぎの各側面を上部と下部とに分けて施療可能としている。また、図14cに示すように、第一凹部1D内の底面に対応する位置に配置した第一底部膨縮袋410Bを左右に分割して並設するようにしてもよい。つまり、ふくらはぎ裏面をさらに左右部分に分けて施療可能としている。
【0097】
また、第一実施形態及び第二実施形態では、第二下肢保持部2の第二凹部2Dの側面に対応する位置のみに左右一対の第二側部膨縮袋420Sを配置し、底面に対応する位置には膨縮袋を配置しない例(図14(a))について示したが、本発明はこれに限られない。本発明では、例えば、図14(d)に示すように、第二凹部2Dの底面に対応する位置に第二底部施療子42B(第二底部膨縮袋420B)を設けても良い。これにより、施療者のふくらはぎ下部から足首の裏面側の筋肉と腱とを接続する箇所及び腱を第二底部膨縮袋420Bにより押圧し、筋肉と腱とを接続する箇所及び腱をストレッチする施療を行う事ができる。
【0098】
また、第一及び第二実施形態では、施療子4を、第一側部施療子41S、第一底部施療子41B、第二側部施療子42S、第三側部施療子43Sをそれぞれ空気膨縮袋たるエアバッグで構成し、エアーの給排気機構によってそれぞれ独立して膨張収縮可能としているが、本発明はこれに限られない。これら第一側部施療子41S、第一底部施療子41B、第二側部施療子42S、第三側部施療子43Sのうち、少なくともいずれかを突起体からなる施療子又は揉み玉で構成してもよい。また、第三底部施療子として足裏施療子44を、下部に備えたエアバッグの膨張縮で移動する突起体によって構成しているが、これを機械駆動式の揉み玉又は突起体とし、或いは空気膨縮袋たるエアバッグで構成してエアーの直接の給排気機構によって足裏へ直接接触しながら膨張収縮するものとしてもよい。
【0099】
また、第一及び第二実施形態では、板金製作によって第一支持部材61の第一プレート部60A及び側部60Bを形成している(図6、図7)が、棒状のフレーム部によって第一支持部材を構成してもよい。また、第一駆動源55、第二駆動源71は、それぞれ、座の下部にてフレーム支持された第一駆動源55(図3)、第二支持部材62のフレーム部70内に支持された第二駆動源71(図6、図7)からなるものとしているが、この他に、エアーの給排気構造によって第二下肢保持部2をスライド移動するために駆動したり第一下肢保持部1を回動させたりするものでもよい。また、駆動源として、ステッピングモーター、サーボモーターを備えたものとし、移動量判別用のセンサ5Sやセンサ識別孔52hを省略することも可能である。
【0100】
また、第一及び第二実施形態では、第一下肢保持部1及び第二下肢保持部2を第一駆動源55及び第二駆動源71によってそれぞれ回動及び伸縮させ、第三下肢保持部3を弾性支持部材65によって弾性支持することでスライド量(伸縮量)を自動調節しているが、本発明はこれに限られない。本発明では、他の形態として、第二下肢保持部2の第二駆動源71を取り除くか第二駆動源71と共に弾性支持部材によって第二支持部材62を支持しスライド移動せしめるものとしてもよく、第三下肢保持部3を駆動源によってスライド駆動させてもよい。上記のほか、例えば実施例間の各要素の組み合わせ、一部要素の付加、削除、公知部品への置換、部品形状又は部品材質の適宜変更や一部要素のみの抽出、一体又は別体の構成変更といった変更又は変形が可能である。
【符号の説明】
【0101】
1 第一下肢保持部
1D 第一凹部
2 第二下肢保持部
2D 第二凹部
3 第三下肢保持部
3D 第三凹部(足収容部)
4 施療子
410S 側部膨縮袋(第一側部膨縮袋)
410B 底部膨縮袋(第一底部膨縮袋)
41S 第一側部施療子
41B 第一底部施療子
42S 第二側部施療子
42B 第二底部施療子
61 第一支持部材
62 第二支持部材
63 第三支持部材
65 弾性支持部材
71 第二駆動源(駆動源)
B 座部
O 足載せ部
【特許請求の範囲】
【請求項1】
座部と、
前記座部の前方に回動可能に設けられた第一下肢保持部と、前記第一下肢保持部に隣接するように設けられた第二下肢保持部と、前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接するように設けられた第三下肢保持部と、前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部とを備え、
前記足載せ部の第二下肢保持部及び第三下肢保持部は、それぞれ互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能に構成される、椅子式マッサージ機。
【請求項2】
前記第一下肢保持部及び前記第三下肢保持部とは独立して、前記第二下肢保持部を施療者の脚の長手方向へスライド移動させるための駆動源をさらに備える、請求項1に記載の椅子式マッサージ機。
【請求項3】
前記第一下肢保持部を支持し、前記座部の前方に回動可能に設けられた第一支持部材と、
前記第二下肢保持部を支持し、前記第一支持部材に対して施療者の脚の長手方向にスライド移動可能な第二支持部材とをさらに備え、
前記駆動源は、前記第二支持部材を前記第一支持部材に対して施療者の脚の長手方向にスライド移動させるように構成されている、請求項2記載の椅子式マッサージ機。
【請求項4】
前記第一下肢保持部は、前記座部に対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さない、請求項1、2又は3のいずれかに記載の椅子式マッサージ機。
【請求項5】
前記座部、前記第一下肢保持部又は第二下肢保持部の少なくともいずれかと、前記第三下肢保持部との間に、前記第三下肢保持部を弾性支持する弾性支持部材をさらに備え、
前記第三下肢保持部は、施療者の足裏を当接させて足を収容する足収容部を有し、
前記足収容部に施療者の足を収容して前記足載せ部に施療者の下肢をセットすることにより、前記第三下肢保持部がスライド移動し、
前記弾性支持部材は、前記第三下肢保持部のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置で前記第三下肢保持部を前記第三下肢保持部側向きの弾性反力が生じた状態で弾性支持するように構成されている、請求項1、2、3又は4のいずれか記載の椅子式マッサージ機。
【請求項6】
座部と、
前記座部の前方に回動可能に設けられた第一下肢保持部と、前記第一下肢保持部に隣接するように設けられた第二下肢保持部と、前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接するように設けられた第三下肢保持部と、前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部と、
前記第一下肢保持部と前記第三下肢保持部との間の移動可能範囲内で、前記第一下肢保持部の移動又は回動動作、及び、前記第三下肢保持部の移動動作とは独立して、前記第二下肢保持部を施療者の脚の長手方向にスライド移動させるための駆動源とを備える、椅子式マッサージ機。
【請求項7】
前記第一下肢保持部は、前記座部に対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さない、請求項6記載の椅子式マッサージ機。
【請求項8】
前記第三下肢保持部は、前記第一下肢保持部及び前記第二下肢保持部の少なくともいずれか一方の移動又は回動動作とは独立して、施療者の脚の長手方向にスライド移動するように構成されている、請求項6又は7に記載の椅子式マッサージ機。
【請求項9】
前記座部、前記第一下肢保持部又は第二下肢保持部の少なくともいずれかと、前記第三下肢保持部との間に、前記第三下肢保持部を弾性支持する弾性支持部材をさらに備え、
前記第三下肢保持部は、施療者の足裏を当接させて足を収容する足収容部を有し、
前記足収容部に施療者の足を収容して前記足載せ部に施療者の下肢をセットすることにより、前記第三下肢保持部がスライド移動し、
前記弾性支持部材は、前記第三下肢保持部のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置で前記第三下肢保持部を弾性支持するように構成されている、請求項6、7又は8のいずれか記載の椅子式マッサージ機。
【請求項10】
座部と、
前記座部に着座した施療者の左右のふくらはぎ部分をそれぞれ配置可能な一対の第一凹部を含み、前記座部の前方に回動可能に設けられた第一下肢保持部と、
前記第一下肢保持部に隣接すると共に前記第一下肢保持部から施療者の足先方向へ分離可能に設けられた第二下肢保持部と、
前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接すると共に前記第二下肢保持部から施療者の足先方向へ分離可能に設けられた第三下肢保持部と、
前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを備え、
前記施療子は、前記一対の第一凹部の各々の両側部にそれぞれ設けられ、施療者のふくらはぎの各側部を施療する一対の第一側部施療子と、前記一対の第一凹部の各々の両底部に設けられ、施療者のふくらはぎの裏部を施療する第一底部施療子と、を含み、
前記第二下肢保持部及び第三下肢保持部は、それぞれ互いに独立して、前記第1下肢保持部に対し施療者の脚の長手方向にスライド移動可能に構成される、椅子式マッサージ機。
【請求項11】
前記第二下肢保持部は、施療者の両足それぞれの足首からふくらはぎの間の部分を配置可能な一対の第二凹部を含み、
前記施療子は、前記一対の第二凹部の各々の両側部にそれぞれ設けられ、施療者の足首からふくらはぎの間の各側部を施療する一対の第二側部施療子と、前記一対の第二凹部の各々の両底部に設けられ、施療者の足首からふくらはぎの間の裏部を施療する第二底部施療子と、の少なくともいずれかを含む、請求項10記載の椅子式マッサージ機。
【請求項12】
前記一対の第一側部施療子はそれぞれ、気体又は液体が流入又は排出されることにより膨縮可能な側部膨縮袋を含み、
前記第一底部施療子は、気体又は液体が流入又は排出されることにより膨縮可能な底部膨縮袋を含み、
前記側部膨縮袋と前記底部膨縮袋とは、互いに独立して膨縮可能に構成されている、請求項10又は11記載の椅子式マッサージ機。
【請求項13】
前記一対の第一側部施療子のそれぞれ又は前記第一底部施療子は、前記第一凹部を構成する各側面又は底面に対応する位置で上下又は左右方向に並設された複数の側部膨縮袋又は底部膨縮袋を含み、
前記並設された複数の側部膨縮袋又は底部膨縮袋は、それぞれ、互いに独立して膨張収縮可能に構成されている、請求項12記載の椅子式マッサージ機。
【請求項1】
座部と、
前記座部の前方に回動可能に設けられた第一下肢保持部と、前記第一下肢保持部に隣接するように設けられた第二下肢保持部と、前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接するように設けられた第三下肢保持部と、前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部とを備え、
前記足載せ部の第二下肢保持部及び第三下肢保持部は、それぞれ互いに独立して、前記第一下肢保持部に対し施療者の脚の長手方向にスライド移動可能に構成される、椅子式マッサージ機。
【請求項2】
前記第一下肢保持部及び前記第三下肢保持部とは独立して、前記第二下肢保持部を施療者の脚の長手方向へスライド移動させるための駆動源をさらに備える、請求項1に記載の椅子式マッサージ機。
【請求項3】
前記第一下肢保持部を支持し、前記座部の前方に回動可能に設けられた第一支持部材と、
前記第二下肢保持部を支持し、前記第一支持部材に対して施療者の脚の長手方向にスライド移動可能な第二支持部材とをさらに備え、
前記駆動源は、前記第二支持部材を前記第一支持部材に対して施療者の脚の長手方向にスライド移動させるように構成されている、請求項2記載の椅子式マッサージ機。
【請求項4】
前記第一下肢保持部は、前記座部に対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さない、請求項1、2又は3のいずれかに記載の椅子式マッサージ機。
【請求項5】
前記座部、前記第一下肢保持部又は第二下肢保持部の少なくともいずれかと、前記第三下肢保持部との間に、前記第三下肢保持部を弾性支持する弾性支持部材をさらに備え、
前記第三下肢保持部は、施療者の足裏を当接させて足を収容する足収容部を有し、
前記足収容部に施療者の足を収容して前記足載せ部に施療者の下肢をセットすることにより、前記第三下肢保持部がスライド移動し、
前記弾性支持部材は、前記第三下肢保持部のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置で前記第三下肢保持部を前記第三下肢保持部側向きの弾性反力が生じた状態で弾性支持するように構成されている、請求項1、2、3又は4のいずれか記載の椅子式マッサージ機。
【請求項6】
座部と、
前記座部の前方に回動可能に設けられた第一下肢保持部と、前記第一下肢保持部に隣接するように設けられた第二下肢保持部と、前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接するように設けられた第三下肢保持部と、前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを含む足載せ部と、
前記第一下肢保持部と前記第三下肢保持部との間の移動可能範囲内で、前記第一下肢保持部の移動又は回動動作、及び、前記第三下肢保持部の移動動作とは独立して、前記第二下肢保持部を施療者の脚の長手方向にスライド移動させるための駆動源とを備える、椅子式マッサージ機。
【請求項7】
前記第一下肢保持部は、前記座部に対して任意の角度に回動調節可能に支持されると共に、施療者の脚の長手方向への移動距離調節機能を有さない、請求項6記載の椅子式マッサージ機。
【請求項8】
前記第三下肢保持部は、前記第一下肢保持部及び前記第二下肢保持部の少なくともいずれか一方の移動又は回動動作とは独立して、施療者の脚の長手方向にスライド移動するように構成されている、請求項6又は7に記載の椅子式マッサージ機。
【請求項9】
前記座部、前記第一下肢保持部又は第二下肢保持部の少なくともいずれかと、前記第三下肢保持部との間に、前記第三下肢保持部を弾性支持する弾性支持部材をさらに備え、
前記第三下肢保持部は、施療者の足裏を当接させて足を収容する足収容部を有し、
前記足収容部に施療者の足を収容して前記足載せ部に施療者の下肢をセットすることにより、前記第三下肢保持部がスライド移動し、
前記弾性支持部材は、前記第三下肢保持部のスライド移動に伴って伸長し、施療者の下肢の長さに対応する脚の長手方向位置で前記第三下肢保持部を弾性支持するように構成されている、請求項6、7又は8のいずれか記載の椅子式マッサージ機。
【請求項10】
座部と、
前記座部に着座した施療者の左右のふくらはぎ部分をそれぞれ配置可能な一対の第一凹部を含み、前記座部の前方に回動可能に設けられた第一下肢保持部と、
前記第一下肢保持部に隣接すると共に前記第一下肢保持部から施療者の足先方向へ分離可能に設けられた第二下肢保持部と、
前記第二下肢保持部の前記第一下肢保持部とは反対側に隣接すると共に前記第二下肢保持部から施療者の足先方向へ分離可能に設けられた第三下肢保持部と、
前記第一下肢保持部、前記第二下肢保持部及び前記第三下肢保持部にそれぞれ設けられ、施療者の下肢をマッサージする施療子とを備え、
前記施療子は、前記一対の第一凹部の各々の両側部にそれぞれ設けられ、施療者のふくらはぎの各側部を施療する一対の第一側部施療子と、前記一対の第一凹部の各々の両底部に設けられ、施療者のふくらはぎの裏部を施療する第一底部施療子と、を含み、
前記第二下肢保持部及び第三下肢保持部は、それぞれ互いに独立して、前記第1下肢保持部に対し施療者の脚の長手方向にスライド移動可能に構成される、椅子式マッサージ機。
【請求項11】
前記第二下肢保持部は、施療者の両足それぞれの足首からふくらはぎの間の部分を配置可能な一対の第二凹部を含み、
前記施療子は、前記一対の第二凹部の各々の両側部にそれぞれ設けられ、施療者の足首からふくらはぎの間の各側部を施療する一対の第二側部施療子と、前記一対の第二凹部の各々の両底部に設けられ、施療者の足首からふくらはぎの間の裏部を施療する第二底部施療子と、の少なくともいずれかを含む、請求項10記載の椅子式マッサージ機。
【請求項12】
前記一対の第一側部施療子はそれぞれ、気体又は液体が流入又は排出されることにより膨縮可能な側部膨縮袋を含み、
前記第一底部施療子は、気体又は液体が流入又は排出されることにより膨縮可能な底部膨縮袋を含み、
前記側部膨縮袋と前記底部膨縮袋とは、互いに独立して膨縮可能に構成されている、請求項10又は11記載の椅子式マッサージ機。
【請求項13】
前記一対の第一側部施療子のそれぞれ又は前記第一底部施療子は、前記第一凹部を構成する各側面又は底面に対応する位置で上下又は左右方向に並設された複数の側部膨縮袋又は底部膨縮袋を含み、
前記並設された複数の側部膨縮袋又は底部膨縮袋は、それぞれ、互いに独立して膨張収縮可能に構成されている、請求項12記載の椅子式マッサージ機。
【図1】


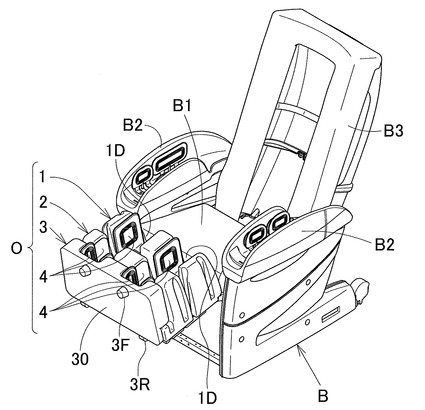
【図2】
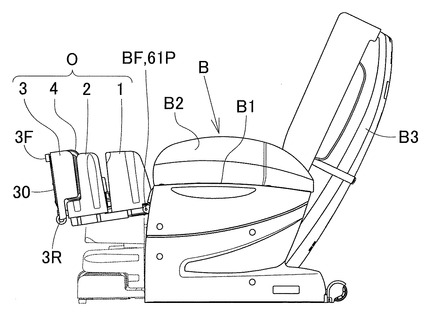
【図3】
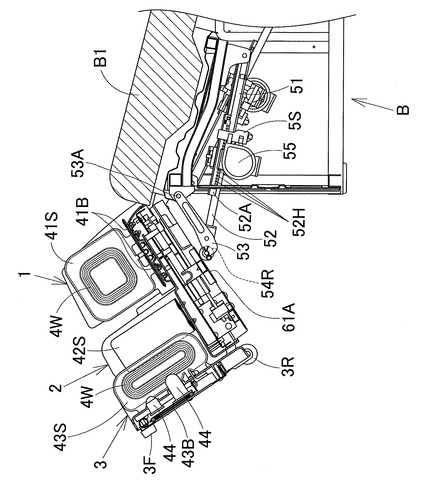
【図4】
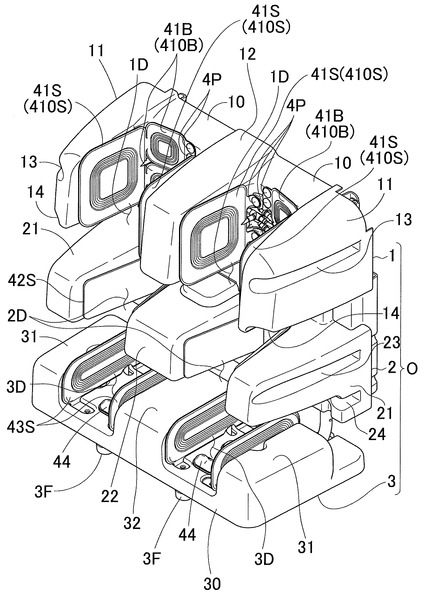
【図5】
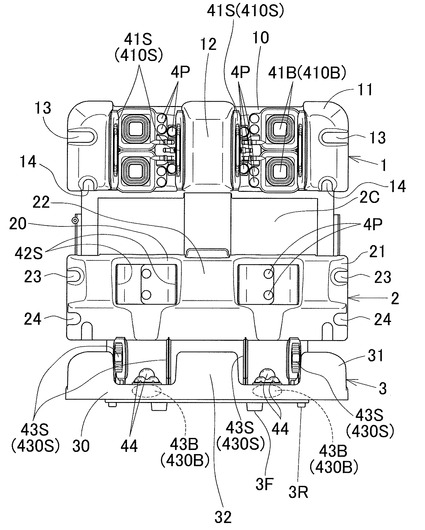
【図6】
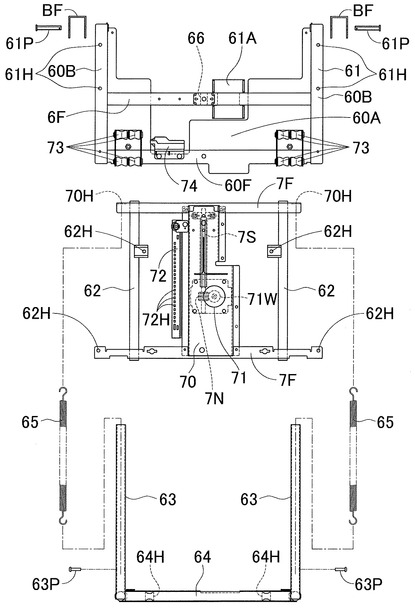
【図7】
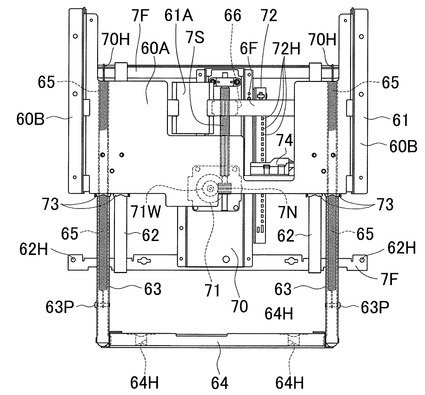
【図8】
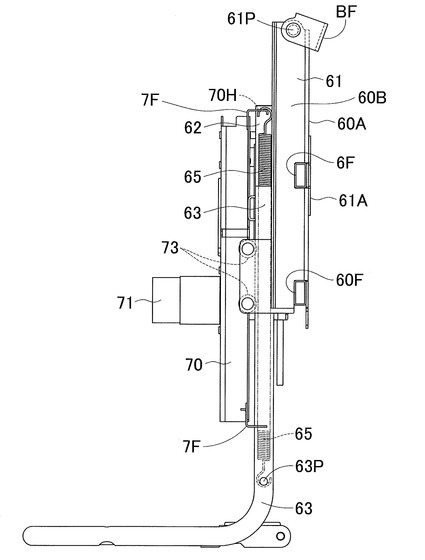
【図9】
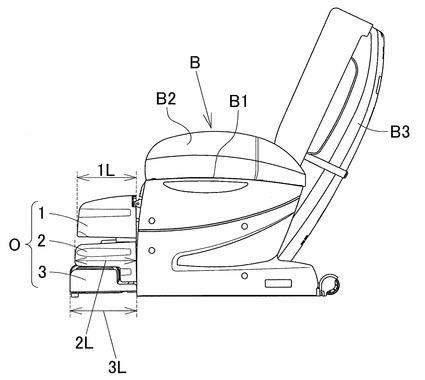
【図10】
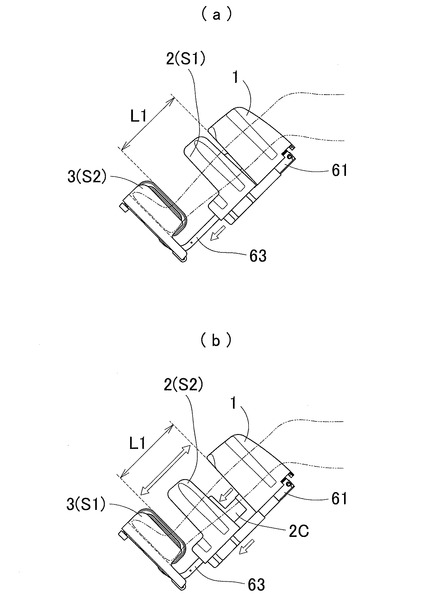
【図11】
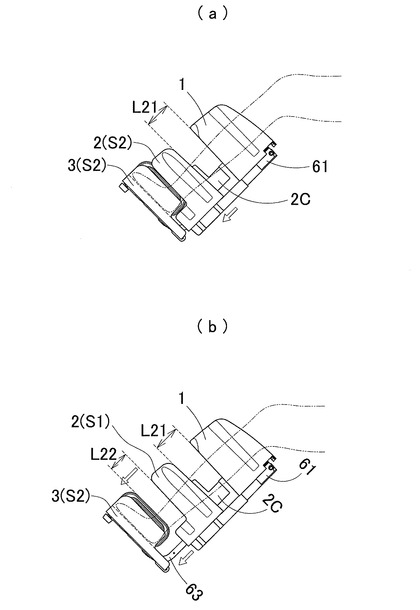
【図12】
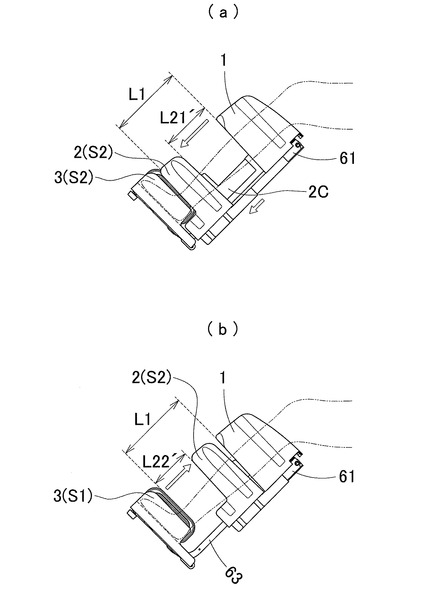
【図13】
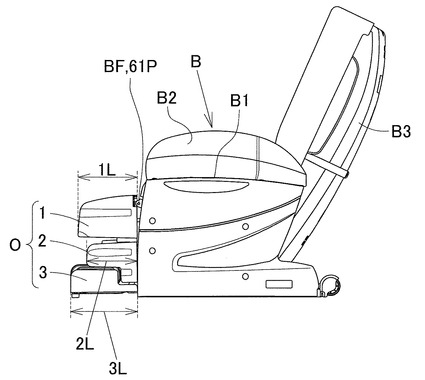
【図14】
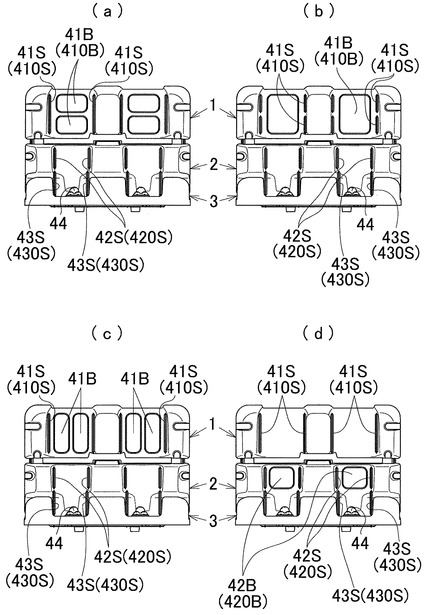
【図15】
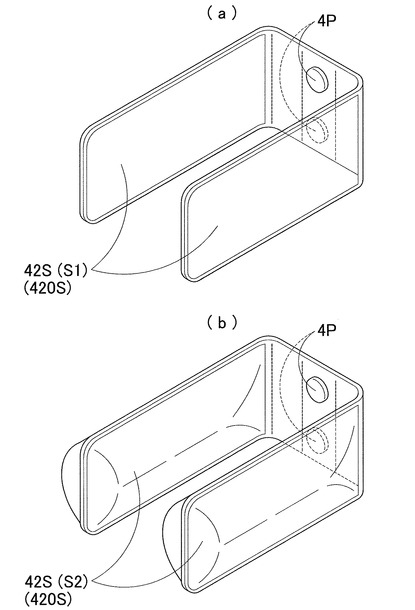
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−22403(P2013−22403A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−162862(P2011−162862)
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000136491)株式会社フジ医療器 (137)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000136491)株式会社フジ医療器 (137)
【Fターム(参考)】
[ Back to top ]