
植物の自動分離・植込システム
【課題】 障害物が密集した場所やインビトロ等の狭い作業空間において、培養した無菌の植物を分割し、発根用容器に移し替える移植工程の自動化を可能にするシステムの提供。
【解決手段】 ロボット部と、センサ部と、先端に把持爪を有し、一部又は全部が弾性特性を有するロッドを備えたハンド部と、各部を制御する総合コントローラとからなる植物の自動分割システムであって、前記センサ部が植物の形状を計測する第1のステップと、第1のステップの計測結果に基づき前記ロボット部が前記ハンド部を移動させる第2のステップと、前記センサ部が前記ハンド部と植物の相対距離を計測する第3のステップと、前記把持爪が植物と当接するまでハンド部を移動させる第4のステップと、前記ロッドに撓みを生じさせる第5のステップを有することを特徴とする植物の自動分離・植込システム。
【解決手段】 ロボット部と、センサ部と、先端に把持爪を有し、一部又は全部が弾性特性を有するロッドを備えたハンド部と、各部を制御する総合コントローラとからなる植物の自動分割システムであって、前記センサ部が植物の形状を計測する第1のステップと、第1のステップの計測結果に基づき前記ロボット部が前記ハンド部を移動させる第2のステップと、前記センサ部が前記ハンド部と植物の相対距離を計測する第3のステップと、前記把持爪が植物と当接するまでハンド部を移動させる第4のステップと、前記ロッドに撓みを生じさせる第5のステップを有することを特徴とする植物の自動分離・植込システム。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、植物を自動で分離・植込するためのシステムに関し、特に無菌クローン苗の移植において、培養した無菌の幼苗を分割し、発根用容器に移し替える移植工程の自動化を可能にするシステムに関する。
【背景技術】
【0002】
近年園芸作作物や樹木の苗の生産においてこれまで行われてきた実生苗や挿し木苗での生産以外にマイクロプロパゲーションで優秀個体の無菌化クローンを大量増殖し、発根させて苗製品にする手法が広く普及してきている。
一般的な手法としては、成長組織点を無菌環境内で植物個体から切出してインビトロ(無菌透明容器内)で培養環境を与え、多芽体に成長させ、さらに継体培養により大量増殖させ、そして大量増殖させたそれぞれの幼芽を最適な大きさまでインビトロで成長させた後に、再び無菌環境で幼芽を分割し、発根用の容器に移し替え、再びインビトロで培養し発根完了後に無菌クローン苗製品とするものがある。感染した苗であっても、植物体成長の元になる成長点組織にはウィルスが侵入しないことを利用した手法である。
【0003】
このように植物工場での生産工程として主にインビトロでの培養工程と分割移植工程がある。培養工程についてはほぼ自動化されているが、分割と移植が手作業で行われており、大量に優秀な作業者を繁忙期に確保する必要があることから自動化要求が増大している。
【0004】
しかしながら、自動化に際しては、不定形な形状をしている植物の幼芽を分割移植するために、茎のどの部分をどの位置で切るかといった高度で複雑な認識を行わねばならない。また、幼芽は柔らかく脆弱であり、過剰な把持力を与えた場合、茎の導管を破壊しその後の生育が順調にいかないという問題がある。このため幼芽の移植を自動的に行うためには高度な形状認識と微少な把持力制御が不可欠であった。
【0005】
苗の分割移植装置としては、レーザー光を利用した認識装置により苗の形状を認識し、認識結果に基づいて苗の所定の高さの位置に把持機構及び切断機構を導く装置が提言されている(特許文献1)。
【0006】
また、挿し木苗の移植システムとしては、オープントレイ上の苗に対してスリットレーザ光とPSD センサにより茎形状をスキャンし歪みセンサによるフィードバックによる把持力制御、マニピュレーターにより挿し木苗の自動生産をするものが提言されている(非特許文献1,2)。
【特許文献1】特開平3−228607号公報
【非特許文献1】M.Takatsuji, Handbook of Plant Factory,Tokai University Press, pp.123{159, 1997. 東海大学出版会編:「植物工場ハンドブック」, 東海大学出版会(1997), pp123-159
【非特許文献2】高山眞策シーエムシー出版 種苗生産システム(1992 初版2002 普及版pp180)
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記特許文献1の装置では、オープントレイでの作業を前提としており、容器の中など苗が密集した作業環境での作動はできなかった。
【0008】
また、上記特許文献1の装置及び非特許文献1,2のシステムでは、無菌クローン苗の生産を行う場合、把持部の滅菌処理への対応という点で容器内の苗の取り扱いに問題があった。すなわち、インビトロでの作業はできないため、無菌状態とするためには、培養工程においてもクリーンルームが必要であった。
【0009】
また、無菌状態で作業をするためには、定期的にその装置の把持部とその近傍の部品を取り外して高温高圧蒸気等で滅菌処理するのが好ましいが、力制御のための歪みセンサ等の配置が必要であり、取り外しが困難な構造、歪みセンサの耐久性の問題から滅菌処理を行うことは難しかった。
【0010】
そこで、本発明は、上記課題を鑑み、障害物が密集した場所やインビトロ等の狭い作業空間において、培養した無菌の植物を分割し、発根用容器に移し替える移植工程の自動化を可能にするシステムを提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するために、本発明は、アクチュエータからの回転力により生ずるロッドの弾性変形を利用することで最適な把持力を得るハンド部を、センサ部からの計測情報に基づいてロボット部及びハンド部を所定の方法で制御することによって、植物の自動分離・植込を可能としている。
【0012】
すなわち、第1の発明は、ロボット部と、センサ部と、先端に把持爪を有し、一部又は全部が弾性特性を有するロッドを備えたハンド部と、各部を制御する総合コントローラとからなる植物の自動分割システムであって、前記センサ部が植物の形状を計測する第1のステップと、第1のステップの計測結果に基づき前記ロボット部が前記ハンド部を移動させる第2のステップと、前記センサ部が前記ハンド部と植物の相対距離を計測する第3のステップと、前記把持爪が植物と当接するまでハンド部を移動させる第4のステップと、前記ロッドに撓みを生じさせる第5のステップを有することを特徴とする植物の自動分離・植込システムである。
【0013】
第2の発明は、第1の発明において、前記第1のステップは、光切断法により植物表面の一部の位置を計測し、相対ステレオ法により把持位置を認識することを特徴とする。
【0014】
第3の発明は、第1又は2の発明において、前記ロッドは、円柱形状であり、前記第5のステップは、下記式1ないし3により植物と把持爪が接した時点から、予め設定した把持力を与えるための把持爪の回転角度を算出することを特徴とする。
【数1】

F:把持力、δ:弾性変形量(撓み量)、E:縦弾性係数、l:弾性特性を有する材料長さ、I:断面2次モーメント
【数2】
d:弾性特性を有する材料の直径
【数3】
θ:最適ひねり角度、L:ロッド軸中心線から対象物把持位置までの最小距離
【0015】
第4の発明は、第1ないし3のいずれかの発明において、更に、前記ハンド部は、先端に切断刃を有し、前記第5のステップにおいて、更に、該切断刃により植物を切断することを特徴とする。
【0016】
第5の発明は、第1ないし4のいずれかの発明において、前記植物は、作業孔のある密閉型植物培養容器で培養された植物であることを特徴とする。
【0017】
第6の発明は、第1ないし5のいずれかの発明において、更に、搬送コントローラと、検知センサと、搬送装置とからなる搬送部を有し、前記第1のステップの前に、搬送部が植物培養容器を搬入するステップと、前記第5のステップの後に、搬送部が植物培養容器を搬出するステップを有することを特徴とする。
【0018】
第7の発明は、第6の発明において、前記検知センサが、植物培養容器が作業位置に到達したことを検知すると、前記搬送コントローラが搬送装置による植物培養容器の搬入を停止する機能と、前記検知センサが、植物培養容器から植物が無くなったことを検知すると、前記搬送コントローラが、搬送装置による植物培養容器の搬出を開始する機能を有することを特徴とする。
【0019】
第8の発明は、第6又は7の発明において、前記搬送コントローラは、予め定められた移植作業が終了すると、搬送装置を稼働して移植作業の終了した植物培養容器を搬出し、空の植物培養容器を搬入する機能を有することを特徴とする。
【0020】
第9の発明は、第1ないし8のいずれかの発明において、植物の直径に応じて予め設定された把持力を与えることを特徴とする。
【0021】
第10の発明は、第1ないし9のいずれかの植物の自動分離・植込システムを2式と、汎用調整ステーションとからなる植物の自動移植ステーションであって、前記一方の植物の自動分離・植込システムは、植物を分離し、該分離された植物を汎用調整ステーションに渡し、前記他方の植物の自動分離・植込システムは、植物を前記調整ステーションから受け渡された植物を容器に植え込むことを特徴とする植物の自動移植ステーションである。
【0022】
なお、本発明によれば、植物だけでなく、把持することのできる脆弱物であればどのようなものでも取り扱うことが可能である。
【発明の効果】
【0023】
本発明によれば、障害物が密集した場所やインビトロ環境等の狭い作業空間において、培養した無菌の植物の分離・植込作業を自動化することができる。
【0024】
また、植物の移植を自動的に行うために必要な微少な把持力制御が容易に行うことができる。すなわち、分割又は移植する際に、植物に過剰な把持力を与えるおそれがなく、茎の導管の破壊を防ぐことができるので、分割又は移植に伴う成長障害も生じない。
【0025】
また、構造上把持部を取り外して高温高圧蒸気等で滅菌処理することが可能であり、メンテナンス性にも優れる。
【発明を実施するための最良の形態】
【0026】
本発明を具体化した実施形態を図面に基づいて説明する。
1.システム構成
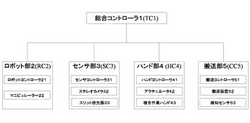
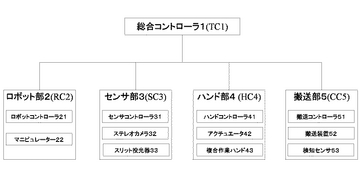
図1に示すとおり、本発明に係るシステムは、統合コントローラ1とネットワークを介してつながるロボット部2、センサ部3、ハンド部4、及び搬送部5とから構成される。
ネットワークは汎用的なものでよく、例えば、イーサネット(登録商標)でハブを介して接続し、統合コントローラ1
各部2〜4にTCP/IPプロトコルでコマンド送信とアンサ受信することでシステムの制御を行う。
なお、さらにシステムの信頼性を高めるために必要に応じてRS232C通信規格に準拠した専用線を別途用意しておく。例えば、TCP/IPネットワークの障害時に非常停止の信号やコントローラの電源立ち上がり時等における準備完了信号等を送ることが可能となり、最低限の信頼性確保することができる。
以下、各部の構成を具体例で説明する。
【0027】
(1)総合コントローラ1
総合コントローラは、ロボット部2、センサ部3、ハンド部4及び搬送部5を、ネットワークを介して制御する。パソコン上のソフトウェアとして実現することが可能であり、3次元計測を行うためのライブラリ、計測機器類を制御するためのライブラリ、計測結果から形状認識を行うためのライブラリ、計測結果から測定対象の特徴を抽出し判定を行うためのライブラリを有している。
【0028】
(2)ロボット部2
ロボット部2はロボットコントローラ21とマニピュレーター22とからなり、ロボットコントローラ21は統合コンコントローラ1からの指令によりハンド部4の位置制御を行う。
少なくとも3軸の並進運動が可能(直動3軸)である必要があるが、更に3軸の姿勢変化可能なこと(6軸多関節)が望ましい。
【0029】
(3)センサ部3
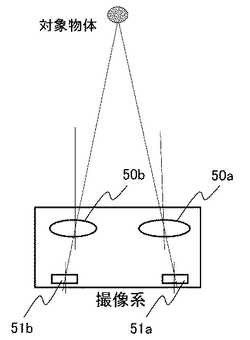
センサ部3は、センサコントローラ31と、当該センサコントローラに接続された一対のステレオカメラ32と、スリット投光器33とから構成され、ステレオ撮像が可能である。遠近歪みをなくするためには、撮像光学系にあおり光学系を用いることが好ましい。すなわち、図2に示すように2台のカメラを相互に平行にしたままで、レンズ50a,50bの中心とCCD撮像素子51a,51bの中心をずらし、CCD撮像素子とレンズ中心を結んだ一対の撮像系の中心線の交点が計測対象物付近に有るようなあおり光学系を用いることによって、CCD撮像素子上に遠近ひずみのない結像画像を得ることも可能になる。あおり光学系は通常の光学系よりも左右のカメラで共通に撮像できる面積が広くなるため、ステレオ画像処理に有効な光学系である。これにより、カメラから近い位置にある対象物体であっても、正確な相対距離画像を得ることができる。
装置中央にはレーザーダイオード光源を斜めスリットパターンに発光するスリット投光器33が設置してある。斜めスリットパターンは全部で4本あり、撮像範囲のどの位置に計測対象物体が位置してもスリット光が当たるように考慮されている。
なお、視覚センサ周辺部で照明光源からの光が容器に直接反射してカメラに入光しない位置に該照明用光源、好ましくはLEDを配置するのが好ましい。
【0030】
(4)ハンド部4
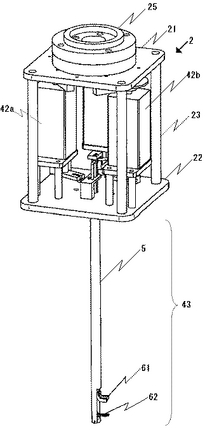
ハンド部4は、ハンドコントローラ41と、アクチュエータ42と、複合作業ハンド43とからなる。図3に示すとおり、アクチュエータ42a〜cは、支持枠2内に配置され、該アクチュエータを制御するハンドコントローラ(図示せず)と、該支持枠2に取り付けられた複合作業ハンド43とで構成されている。以下各構成要素を詳細に説明する。
【0031】
a.支持枠2
支持枠2は上下の基板21,22と、それらの基板を所定の間隔に保持する4本の支持柱23とで構成されており、上方の基板21の上面にはハンド部4をロボット部2に取り付けるための取付座25が設けられ、下方の基板22には、ロッド7挿通用の貫通孔が形成されている。上下の基板21,22間には3個のアクチュエータ42a〜42cが取り付けられている。
【0032】
b.把持部61及び切断部62
複合作業ハンド43は、把持部構造のみが異なる分割用と植込用の2種類がある。図4の(a)は分割用ハンドの一例であり、(b)は植込用ハンドの一例である。どちらのハンドも把持力制御機構である上段把持部61,63を備えており、上段把持部はアクチュエータ42が直動することにより、上下して把持位置の調整を行うことができる。また、アクチュエータ42が回動することにより、把持部61,63、切断部62が開閉運動を行う。ハンドコントローラ41はアクチュエータ42a〜cの制御を行い、複合作業ハンド43を制御する。
把持部61,63及び64は弾性特性を有する材料65と連結されており、これにより脆弱な植物を損傷させないための微少な把持力制御が可能となっている。
また、植え込み用ハンドの場合、上段把持部だけでなく、下段把持部を上下させてもよい。特に脆弱である「把持爪から植物の茎の最下端までの距離」が長いと植込時の培地からの反力により座屈するおそれがあるが、下段把持部を上下させることにより上記距離を短くして何回かに分けて植え込むことが可能となる。すなわち、上記距離を短くしても規定量の植込量を確保出来るようにするため、上段及び下段の把持部で植物を把持した状態で植え込みをした後、下段の把持爪を解放し、下段把持爪を上に移動した後、再度下段把持爪で把持し、植え込みを行うという動作を繰り返し行うことができるのである。これにより、植え込み作業における植物の損傷を防ぐことができる。
分割用ハンド、植え込み用ハンドのどちらも上下移動部の駆動、把持力の伝達、把持部の構造は同じである。但し、分割用ハンドは切断部64が把持部63の下部に配置され、当該切断部62は力伝達経路の剛性を高め、カット時のモーメントに耐えられるようにしてある。
狭い空間で作業する場合には、把持爪に角度を付けることで、作業場所に把持爪を侵入させることが容易となる。例えば、好ましい把持爪とロッドの角度としては30°,45°,60°,90°,120°,135°があげられる。
なお、把持爪及び/又は切断刃は共に回転させてもよいし、一方を回転させない場合には他方を鞘管接合型としてもよい。
【0033】
c.アクチュエータ42a〜42c
図5に示すとおり、アクチュエータ42a,42bにより把持部爪61a,61bが、アクチュエータ42cにより切断刃62aが駆動される。アクチュエータ42aの駆動軸がロッド7a,7bと同一軸方向に直動すると、支持板35から7a,7bに力が伝達され、把持部61が上下に直動する。アクチュエータ42bの駆動軸は回動し、これにより把持爪61aが開閉運動を行う。アクチュエータ42cの駆動軸は回動し、これにより切断刃62aが開閉運動を行う。
【0034】
d.鞘管5
基板22の下面に中央部には、貫通孔に合致させて鞘管5が取り付けられている。鞘管5の上部には、把持用ロッド7a,7bが貫通する孔と、切断用ロッド7cを回転可能に保持する保持孔を設けたロッド支持板が取り付けられている。
また、鞘管5の下方先端部には、把持爪及び切断刃を外方に突出させると共に、把持爪の上下動を許すスリットが形成されている。鞘管5の下端開口は着脱可能な栓によって封鎖し、鞘管内に装着したロッドが脱落するのを防いである。栓は端部を丸くして滑りやすくしておくとよい。
また、狭い場所での作業を行うためには鞘管の直径は細い方がよい。従来のように切断部だけで3〜4cmある装置では、インビトロでの作業はもちろん、植物苗が隣接する環境での移植・分割作業を行うことは難しい。本実施例にかかる装置においては、鞘管の直径は約8mm、各爪刃の長さは約6mmである。爪刃の長さは対象植物の形状、特に葉の長さと同程度に設定するとよい。
【0035】
図6に示すとおり、鞘管5は中途部分で分割されており、凸凹形状の嵌合部8で着脱可能である。バイオ苗の分離・植込作業においては、先端部を滅菌消毒可能とすることが大前提となるため、先端部が取り外せることの意義は大きい。
なお、嵌合部8での脱着を容易にし、駆動トルクにより嵌め合いがはずれないようにするため、嵌め合い部の周囲をパイプでカバーするのが好ましい。
【0036】
e.ロッド7a〜7c
鞘管5の先端の一対の把持爪61a,61bにアクチュエータの力を伝達するロッド7a,7bと、鞘管5の先端の切断刃62aにアクチュエータの力を伝達する切断用ロッド7cがある。把持用ロッド7a,7bは、アクチュエータ42aにより上下動する支持板35で保持され、把持部61はこれにより上下動可能である。把持用ロッド7bはアクチュエータ42bによって回動可能でありこれにより把持爪61aが開閉する。切断用ロッド7cもアクチュエータ42cによって回動可能であり、これにより切断刃62aが開閉し、固定刃61bと協働して対象物を切断する。把持用ロッド7a,7bおよび切断用ロッド7cのロッド支持板の上方に突出した部分には、アクチュエータ42b,42cに取り付けられた回転用アームのスリットに係合する係合部を具えたアームが形成されており、各アクチュエータの回転を各ロッドに伝える。
【0037】
f.作動
図7に示すとおり、まず、ハンド部をX、Y、Z方向に移動させ、ハンド先端部を切断すべき対象物の近傍に移動する(STEP1)。この際、対象物の位置が予め分かっている場合には、対象物の位置計測は不要となる。ハンド先端部が対象物に対面すると、コントローラからの信号によりアクチュエータ42b,42cが回転し、把持爪61a、切断刃62bを開く(STEP2)。アクチュエータ42aを駆動して把持部61の高さを調整し、把持爪61a及び/又は61bが対象物に触れる把持位置までハンド部を移動させる(STEP3)。アクチュエータ42b,42cを逆回転させ、把持爪61a及び切断刃62aが対象物に接するまで閉じる(STEP4)。後述の計算方法により最適な把持力で対象物を把持するようにアクチュエータ42b,42cを逆回転させる(STEP5)。アクチュエータ42aを回転させ把持部61を上昇させ、切断した対象物を分離した後、ハンド部を移動する(STEP6)。
【0038】
(5)搬送部5
搬送部5は、作業前の対象物が載せられる搬入コンベアと、対象物の分離作業を行うためのロータリーテーブルと、作業後の対象物が搬出される搬出コンベアと、これらを制御する搬送コントローラから構成される。
また、検知センサを設け、該検知センサが、植物培養容器が作業位置に到達したことを検知すると搬送装置による搬入を停止する機能と、該検知センサが、植物培養容器から植物が無くなったことを検知すると搬送装置による搬出を開始する機能を有することが好ましい。
【0039】
2.システム制御
本発明に係るシステムの制御フローは、図8に示すとおりである。
まず、搬送部5は総合コントローラ1からの命令により対象となる植物培養容器を作業位置まで搬送する。この際、搬送部5の検知センサ53は植物が作業位置まで移動されたかを監視し、作業位置に到達した際には、総合コントローラ1から搬送部5に停止命令が出される(STEP11)。次に、総合コントローラ1はセンサ部3に把持対象となる植物の形状の計測命令を送信し、茎の把持位置を認識する(STEP12)。その後、ロボット部2には総合コントローラ1からの命令により茎にぶつからない程度に複合作業ハンド43を把持部及び/又は切断刃を閉じた状態で植物近傍まで移動させる
(STEP13)。センサ部2はセンサコントローラ1からの命令により、茎の把持位置と複合作業ハンド43の相対距離及び茎の直径の計測し、これらの情報を取得する(STEP14)。ロボット部2は総合コントローラ1からの命令により、STEP14で取得した情報に基づき、把持位置まで複合作業ハンド43の把持部を移動させる(STEP15)。総合コントローラ1はハンド部4に対して最適把持ストローク及び/又は切断動作の命令を送信する(STEP16)。総合コントローラ1は把持した植物の分離・植込命令をロボット部2及びハンド部4に対して送信する(STEP17)。植物培養容器内に残りの植物がある場合には、STEP12に戻る(STEP18)。植物培養容器内の全ての植物の分離・植込が終了すると、容器の排出が行われSTEP11に戻る(STEP18,19)。
【0040】
3.植物の空間位置及び形状の計測
本発明では、光切断法と相対ステレオ法の組み合わせにより植物の形状や空間位置の計測を行う。
光切断法とは、計測物体に平面状のレーザー光(スリット光)を照射し、 三角測量の原理を利用して距離を計測する手法である。相対ステレオ法とは、基本的には複数のカメラを使用したステレオ視を距離計測の手法とするが、ステレオ視以外の方法で得られる画面内の基準点までの距離情報を利用し、ステレオ画像処理を行うことにより、基準点からの相対高さを計測する手法である。高速な画像処理が可能であり、カメラ間隔や取り付け角度等の外部パラメータを必要としない利点がある。
【0041】
作業空間内に茎があるかの判定する際には、設定した範囲の太さの茎が、設定した立体空間範囲の中にあるかをスリット光が茎上で反射している特徴を識別し、光切断法により位置計測をすることで判定を行う。作業空間範囲の中に茎が検出されると、その茎のどの位置が把持位置として適しているかを検出する。具体的には、茎の光点位置から追跡して分岐点を判断し、その上部で葉が存在しない部分を切り出し点とする。
切り出し点が分かった後に、複合作業ハンド43を近傍まで移動させることで、相対ステレオ方法により把持位置とハンドとの間の相対距離を算出することができる。これにより、複合作業ハンド43の残移動量がわかることになる。
【0042】
把持位置を認識するための空間位置及び形状の計測方法について、以下具体例で説明する。
図9に示すように、多数の幼芽が間隔を保って植え付けられた育苗床に、横からセンサを近づけ、スリット光を投光する。ここで、スリット光は複数のスリットパターンが斜め方向に平行に投影されるように作られており、光切断法による計測時には、その多数のスリット光が幼芽の茎に当たった中で、いちばん画面に近いものを選ぶ、などの手法が用いられる。このスリット光が当たった位置の空間座標は、通常のスリット光切断法を用いて高精度に決定することができる。このスリット光切断法により、左右のカメラ32aおよび32bのどちらか一方で、スリット光が当たった位置の幼芽の茎の空間位置を決定する。ここで、左右のカメラ画像でスリット光が当たった位置が一致するように、左右2枚の画像を重ね合わせる。すると、カメラからの距離が等しい茎の上の各点では画像のずれは発生しないが、茎が前後に曲がっていると、重ね合わせの結果、図10下段のように画像のずれが生じる。ここでは、画像のずれ量を視差dとして、これをもとに植物の形状や空間位置を決定する。
【0043】
この計算方法を図11に示す。スリット光が当たった位置で、左右の画像を重ね合わせる。このとき、茎が曲がっていて幼芽が垂直に立っていなければ、スリット光投影位置に比べて茎が前後するため、ステレオ視において画像のずれを生じる。例えば、スリット光の当たった基準位置より茎が後ろにあるとき、右カメラ32aからみた左カメラ32bの対応位置が負のずれ量となる。
ここで、ずれ量(視差)d、カメラの間隔W、カメラからスリット光の当たった位置までを光切断法で測ったときの距離H、求める相対距離をxとすると、以下の式であらわされる関係が導ける。
W/(H+x)=d/x
ここで、W,Hはあらかじめ決まっている値である。幼芽上のスリット光の位置を重ね合わせることにより、画像上の各点の三次元位置を、画像のずれ量dを元に計算できる。
また、上記のようにしてxが求まっていれば、カメラからの距離は(H+x)で求められるので、カメラの各画素が見ている位置が、空間中でどの点を通るかをキャリブレーションであらかじめ求めておけば、3次元位置を求めることも可能である。
【0044】
図9、図10に示すような植物の茎の計測においては、まずスリット光の当たった基準点の座標点が求まる。これを基準点として、本発明に係るシステムを用いることで、図10の画像について、茎の方向に沿ったすべての画素位置で、その基準点からの距離の差(相対距離)が求められる。
【0045】
4.把持用アクチュエータの制御
図12は、把持用アクチュエータへの指令送信プロセスである。
センサコントローラ31は、計測した苗直径データを総合コントローラ1に送信する(STEP21)。総合コントローラ1は、受信した苗直径データをもとに、予め設定された変換テーブルを検索して把持力エリアNoを決定する(STEP22)。総合コントローラ1は、エリアNoをハンドコントローラ41へ送信する(STEP23)。モータコントローラは、支持されたエリアNoから固有の変換テーブルを参照し、必要なパルス量をアクチュエータ42に送信する(STEP24)。
【0046】
5.把持力の算出
把持爪に段階的に把持力を与えた際の、対象物と把持爪の位置変化モデルを示したものが図13である。本発明の把持装置においては、ロッドの一部が弾性特性を有する材料から構成されているため、把持力を強めると共に、左右把持爪の位置も移動する。左右の弾性特性を有する材料のねじれのバランスが取れ、且つ把持対象物が損傷しないように、ロッドに回転角度を与えることで最適把持力を得ることができる。
【0047】
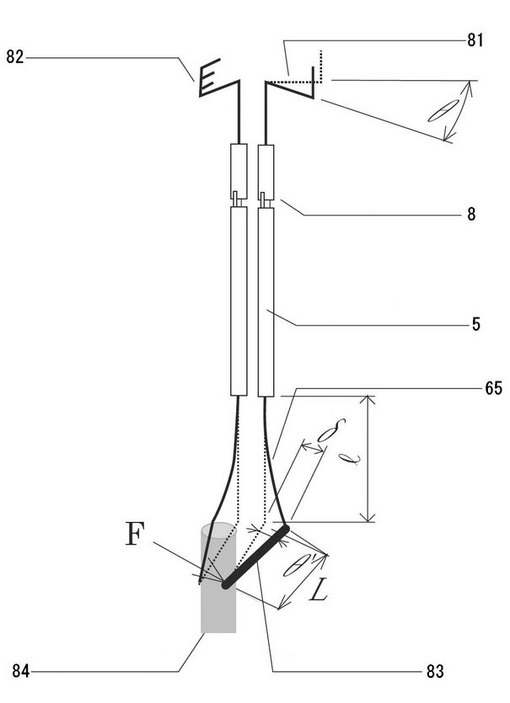
把持爪83における力伝達経路での変形モデルは図14のようになる。ここで設定した把持力Fを与える際の弾性特性を有する材料の弾性変形量δとなり、式5及6から算出される。これに対応する最適ひねり角度θは式7から算出することができ、この回転を制御レバー81に与えることで脆弱物を把持するための最適把持力を得ることができる。
【数4】
F:把持力、δ:弾性変形量(撓み量)、E:縦弾性係数、l:弾性特性を有する材料長さ、I:断面2次モーメント
【数5】
d:弾性特性を有する材料の直径
【数6】
θ:最適ひねり角度、L:ロッド軸中心線から対象物把持位置までの最小距離
【0048】
例えば35グラムを把持したい場合の追い込みストロークθは、l=35、d=0.9、L=6で考えると、
δ=(0.035・353)/(3・19900・(π・0.94/64))=0.78mm
θ=Sin-1(δ/L)=7.47°となる。
【0049】
設定レンジは±5gなので上限、下限でのストロークは40グラムであり、
δ=(0.04・353)/(3・19900・(π・0.94/64))=0.89mm
θ=Sin-1(δ/L)=8.56°となる。
【0050】
同様に、上限のストロークは30グラムであり、
δ=(0.03・353)/(3・19900・(π・0.94/64))=0.67mm
θ=Sin-1(δ/L)=6.41°となる。
ステップモータの最小制御角度は0.5°であり、減速機を付加することでさらに細かい位置決め要求に対応する制御を行うことが可能である。
【0051】
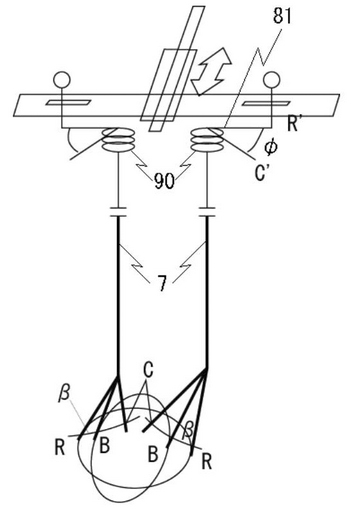
ロッドに弾性特性を利用する材料を用いず、駆動部近傍にトーションバネを用いた弾性体を配置してもよい。図15に示すようにトーションバネ90の一方をロッド7と接合し、他方を制御レバー81と接合することでロッド7に回転を生じさせることができる。把持爪が対象物に当接後さらに回転を加えることでトーションバネに変形が生じ、その結果把持部に最適な把持力が発生する。
【0052】
例えば、予め設定した把持力Fを得るために、必要な把持爪が当接した点からのトーションバネのねじれ角度φは、下記式で求めることができる。
【0053】
M=F・a
M:トーションバネに作用するモーメント、a:中心から把持爪までの長さ
【0054】
φ=ML/EI=64MDN/Ed4
L:トーションバネの有効展開部長さ、E:縦弾性係数、D:コイル平均径、N:巻き数、d:線径、I:断面2次モーメント
【0055】
以下、本発明の実施例を図面に基づいて具体的に説明する。ただし、本発明は下記のものに限定されない。
【実施例1】
【0056】
1.システム構成
本実施例に係るシステムの構成は、図16に示すとおり、マニピュレーター22とその先端に連結された複合作業ハンド43と、ステレオカメラ31とセンサコントローラ32とから構成される。
マニピュレーター22は、三菱電機株式会社のRV-6S(6軸多関節・可搬5kg)を、アクチュエータ42(図示せず)はオリエンタルモーター株式会社のものを使用した。ステレオカメラ32の解像度はVGA、格子間隔は10mmであり、光学系はあおり光学系である。複合作業ハンド43は、上段に一対の把持爪からなる把持部と下段に一対の切断刃からなる切断部を有している。容器内での動作を考慮し複合作業ハンド43は、直径8mmのパイプ内に全ての駆動系を内蔵し、かつ滅菌対応のための把持部取り外しを可能、且つ高温高圧蒸気滅菌に耐えられる構造とした。把持部開閉時にアクチュエータ42からの力を伝達するする弾性材料には、ステンレスを採用した。
【0057】
図17に本実施例に係るセンサ部3の基本構造を示す。
おおり光学系の結像位置に2台の1/3CCDボードカメラを置く。中央にはLED発光部と、スリット光化のためのレンズ系などが組み込まれている。また、センサ部の前にステレオ撮像のためのLED照明系を設けている。
なお、好ましくはスリット光の生成装置としては上記LED以外にもレーザーダイオードとロッドレンズを組み合わせた構成を用いてもよい。
【0058】
図18は、キャリブレーションプレートを基準位置に置いた場合における左右のカメラの中心点からのX,Y 方向計測誤差データである。格子の交差点のCCD上での座標値を計測し、隣接する格子点間の距離をピクセル数で表示している。本実施例においては、レンズ収差補正を行わなくともよく左右のカメラのX,Y方向の認識誤差は多くとも3ピクセルの範囲であったため後で特徴点(茎部)をパターンマッチングにより位置計測を行う際に探索範囲を非常に小さくでき(上下方向で3ピクセルの範囲を探索すれば左右双方の画像に同一点が存在することになり)高速に判定できる。
【0059】
2.植物の位置計測
植物の位置計測は、4本のスリットラインのどれかが茎の上で交差することを利用して、予め設定したアルゴリズムにより茎上にある最適な光点を選び、光切断法でこの位置を計測した。次に、左右2枚の画像の光点を同一位置で重ね合わせたと仮定する。左右の濃淡画像のX軸方向の微分画像を2値化し、茎のみを出現させた画像からそれぞれの画像での茎上の同一点を認識する。その視差量から奥行き方向での光点からの茎中心までの距離を計算する。そしてさらに光点からハンドの軸中心位置までの奥行き方向の距離と、光点から把持部または切断部までの左右どちらかのカメラの2次元画像位置から水平垂直方向の距離を計算することで把持部と切り出し点までの空間距離を計算し、認識結果を統合コントローラに送信する。これがハンドの残移動量となる。さらに切り出し点での奥行き寸法がわかることで、その茎部分の水平方向の茎直径を計測し把持力制御のためのパラメータとした。
【0060】
3.画像処理
図19は、センサ部の基本処理の全体フローの概要である。まず、スリット光投影を行うが、周囲が明るい場合、当てた画像だけでは、スリット光の交点の位置が明確に求まらないので、当てない画像との差画像を求めて、スリット光の当たった位置を安定に求めている。その後、相対ステレオ画像処理をするための画像入力のために、LED照明を点灯し、画像入力する。
【0061】
図20は、画像入力後の相対ステレオ処理を用いた茎位置検出処理フローである。
差画像処理で光点位置を検出した後、画像を微分処理し、微分エッジが茎の太さで並行になっている部分を茎とする。左右の画像を、光点位置で重ね合わせ、微分処理で茎であると決めた部分で画像のずれ量を検出し、相対距離を求め、それをもとに茎中心の空間座標値(Xi,Yi,Zi)を計算する。この後、枝分かれ部分を探して、ロボットを位置決めする点を決定する。
【0062】
4.苗強度の測定
本発明に係るシステムの最適な把持力の範囲を算出するために、ユーカリの幼芽を用いて苗強度の実験を行った。最適な把持力の範囲の算出は、幼芽の茎に徐々に力を加え、幼芽の直径と細胞の破壊による水浸化状の変色が起こる力を計測することで行う。
図21は、ユーカリの幼芽における実験結果であり、丸が打たれた箇所が苗に損傷が発生した荷重を示している。この結果から力制御の要求仕様は次表のようになる。
【0063】
【表1】
5.動作実験
直径をi)0.5から0.9mm、ii)1から1.5mm のユーカリの幼芽各20本について、下記表の要領で自動植込みを行ったところ、変色発生の頻度は0本であり、力制御の困難なクローン苗の自動植込みを実現することができた。
【表2】
【実施例2】
【0064】
図22は、実施例2に係るシステム構成図である。分離ステーション101は、総合コントローラ、ロボット部、センサ部、及びハンド部から構成され、搬入コンベア91により搬送される幼芽の分離作業をロータリーテーブル92で行い、調整ステーション102へ渡す。全ての幼芽が分離された容器は、搬出コンベア93により排出される。
【0065】
調整ステーション101は、汎用的なものであり、分割した一本のシュート(幼芽)の長さをそろえる(茎カット)工程、葉の枚数をそろえる(枝カット)工程、葉の面積をそろえる(葉をカット)工程を有する。
なお、単に分割して取り出した長さによって、数種類に区分分けしてそれぞれ別の発根容器に植えるための判定を行うものでもよい。
【0066】
植込ステーション102では、調整ステーション101で調整した幼芽をオアシス等の発根用培地が敷設された容器への植込作業を行う。オアシス等の敷設された容器は、搬入コンベア95により搬送され、ロータリーテーブル96での容器への植込作業が終了すると、該容器は搬出コンベア97により排出される。
【図面の簡単な説明】
【0067】
【図1】本発明に係るシステムの概略構成図である。
【図2】あおり光学系の説明図である。
【図3】一対の把持爪と切断部を有するハンド部の図面である。
【図4】複合作業ハンドの先端部の説明図である。
【図5】アクチュエータの構成を説明する図面である。
【図6】鞘管の嵌合部の拡大図面である。
【図7】一対の把持爪と切断部を有するハンド部の作動の流れ図である。
【図8】本発明に係るシステムの制御フロー図である。
【図9】植物形状の計測の様子を示す図面である。
【図10】植物形状の計測方法を示す図面である。
【図11】植物形状の計算方法を示す図面である。
【図12】把持用アクチュエータへの指令送信プロセスである。
【図13】対象物と把持爪の位置変化モデルである。
【図14】把持爪の一方における力伝達経路での変形モデルである。
【図15】駆動部近傍にトーションバネを用いたハンド部の図面である。
【図16】本実施例に係るセンサ部3の基本構造図である。
【図17】左右のカメラの中心点からのX,Y 方向計測誤差データである。
【図18】把持用モータへの指令送信プロセスである。
【図19】センサ部の基本処理の全体フローの概要である。
【図20】画像入力後の相対ステレオ処理を用いた茎位置検出処理フローである。
【図21】ユーカリの幼芽における把持力許容範囲の実験結果である。
【図22】実施例2に係るシステム構成図である。
【符号の説明】
【0068】
31 ステレオカメラ
33 スリット光投光器
45 支持板
50 レンズ
51 CCD撮像素子
70 幼芽
80 スリット光照射部
81 制御レバー
82 固定レバー
90 トーションバネ
91,95 搬入コンベア
92,96 ロータリーテーブル
93,97 搬出コンベア
101 分離ステーション
102 調整ステーション
103 植込ステーション
【技術分野】
【0001】
本発明は、植物を自動で分離・植込するためのシステムに関し、特に無菌クローン苗の移植において、培養した無菌の幼苗を分割し、発根用容器に移し替える移植工程の自動化を可能にするシステムに関する。
【背景技術】
【0002】
近年園芸作作物や樹木の苗の生産においてこれまで行われてきた実生苗や挿し木苗での生産以外にマイクロプロパゲーションで優秀個体の無菌化クローンを大量増殖し、発根させて苗製品にする手法が広く普及してきている。
一般的な手法としては、成長組織点を無菌環境内で植物個体から切出してインビトロ(無菌透明容器内)で培養環境を与え、多芽体に成長させ、さらに継体培養により大量増殖させ、そして大量増殖させたそれぞれの幼芽を最適な大きさまでインビトロで成長させた後に、再び無菌環境で幼芽を分割し、発根用の容器に移し替え、再びインビトロで培養し発根完了後に無菌クローン苗製品とするものがある。感染した苗であっても、植物体成長の元になる成長点組織にはウィルスが侵入しないことを利用した手法である。
【0003】
このように植物工場での生産工程として主にインビトロでの培養工程と分割移植工程がある。培養工程についてはほぼ自動化されているが、分割と移植が手作業で行われており、大量に優秀な作業者を繁忙期に確保する必要があることから自動化要求が増大している。
【0004】
しかしながら、自動化に際しては、不定形な形状をしている植物の幼芽を分割移植するために、茎のどの部分をどの位置で切るかといった高度で複雑な認識を行わねばならない。また、幼芽は柔らかく脆弱であり、過剰な把持力を与えた場合、茎の導管を破壊しその後の生育が順調にいかないという問題がある。このため幼芽の移植を自動的に行うためには高度な形状認識と微少な把持力制御が不可欠であった。
【0005】
苗の分割移植装置としては、レーザー光を利用した認識装置により苗の形状を認識し、認識結果に基づいて苗の所定の高さの位置に把持機構及び切断機構を導く装置が提言されている(特許文献1)。
【0006】
また、挿し木苗の移植システムとしては、オープントレイ上の苗に対してスリットレーザ光とPSD センサにより茎形状をスキャンし歪みセンサによるフィードバックによる把持力制御、マニピュレーターにより挿し木苗の自動生産をするものが提言されている(非特許文献1,2)。
【特許文献1】特開平3−228607号公報
【非特許文献1】M.Takatsuji, Handbook of Plant Factory,Tokai University Press, pp.123{159, 1997. 東海大学出版会編:「植物工場ハンドブック」, 東海大学出版会(1997), pp123-159
【非特許文献2】高山眞策シーエムシー出版 種苗生産システム(1992 初版2002 普及版pp180)
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記特許文献1の装置では、オープントレイでの作業を前提としており、容器の中など苗が密集した作業環境での作動はできなかった。
【0008】
また、上記特許文献1の装置及び非特許文献1,2のシステムでは、無菌クローン苗の生産を行う場合、把持部の滅菌処理への対応という点で容器内の苗の取り扱いに問題があった。すなわち、インビトロでの作業はできないため、無菌状態とするためには、培養工程においてもクリーンルームが必要であった。
【0009】
また、無菌状態で作業をするためには、定期的にその装置の把持部とその近傍の部品を取り外して高温高圧蒸気等で滅菌処理するのが好ましいが、力制御のための歪みセンサ等の配置が必要であり、取り外しが困難な構造、歪みセンサの耐久性の問題から滅菌処理を行うことは難しかった。
【0010】
そこで、本発明は、上記課題を鑑み、障害物が密集した場所やインビトロ等の狭い作業空間において、培養した無菌の植物を分割し、発根用容器に移し替える移植工程の自動化を可能にするシステムを提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するために、本発明は、アクチュエータからの回転力により生ずるロッドの弾性変形を利用することで最適な把持力を得るハンド部を、センサ部からの計測情報に基づいてロボット部及びハンド部を所定の方法で制御することによって、植物の自動分離・植込を可能としている。
【0012】
すなわち、第1の発明は、ロボット部と、センサ部と、先端に把持爪を有し、一部又は全部が弾性特性を有するロッドを備えたハンド部と、各部を制御する総合コントローラとからなる植物の自動分割システムであって、前記センサ部が植物の形状を計測する第1のステップと、第1のステップの計測結果に基づき前記ロボット部が前記ハンド部を移動させる第2のステップと、前記センサ部が前記ハンド部と植物の相対距離を計測する第3のステップと、前記把持爪が植物と当接するまでハンド部を移動させる第4のステップと、前記ロッドに撓みを生じさせる第5のステップを有することを特徴とする植物の自動分離・植込システムである。
【0013】
第2の発明は、第1の発明において、前記第1のステップは、光切断法により植物表面の一部の位置を計測し、相対ステレオ法により把持位置を認識することを特徴とする。
【0014】
第3の発明は、第1又は2の発明において、前記ロッドは、円柱形状であり、前記第5のステップは、下記式1ないし3により植物と把持爪が接した時点から、予め設定した把持力を与えるための把持爪の回転角度を算出することを特徴とする。
【数1】
F:把持力、δ:弾性変形量(撓み量)、E:縦弾性係数、l:弾性特性を有する材料長さ、I:断面2次モーメント
【数2】
d:弾性特性を有する材料の直径
【数3】
θ:最適ひねり角度、L:ロッド軸中心線から対象物把持位置までの最小距離
【0015】
第4の発明は、第1ないし3のいずれかの発明において、更に、前記ハンド部は、先端に切断刃を有し、前記第5のステップにおいて、更に、該切断刃により植物を切断することを特徴とする。
【0016】
第5の発明は、第1ないし4のいずれかの発明において、前記植物は、作業孔のある密閉型植物培養容器で培養された植物であることを特徴とする。
【0017】
第6の発明は、第1ないし5のいずれかの発明において、更に、搬送コントローラと、検知センサと、搬送装置とからなる搬送部を有し、前記第1のステップの前に、搬送部が植物培養容器を搬入するステップと、前記第5のステップの後に、搬送部が植物培養容器を搬出するステップを有することを特徴とする。
【0018】
第7の発明は、第6の発明において、前記検知センサが、植物培養容器が作業位置に到達したことを検知すると、前記搬送コントローラが搬送装置による植物培養容器の搬入を停止する機能と、前記検知センサが、植物培養容器から植物が無くなったことを検知すると、前記搬送コントローラが、搬送装置による植物培養容器の搬出を開始する機能を有することを特徴とする。
【0019】
第8の発明は、第6又は7の発明において、前記搬送コントローラは、予め定められた移植作業が終了すると、搬送装置を稼働して移植作業の終了した植物培養容器を搬出し、空の植物培養容器を搬入する機能を有することを特徴とする。
【0020】
第9の発明は、第1ないし8のいずれかの発明において、植物の直径に応じて予め設定された把持力を与えることを特徴とする。
【0021】
第10の発明は、第1ないし9のいずれかの植物の自動分離・植込システムを2式と、汎用調整ステーションとからなる植物の自動移植ステーションであって、前記一方の植物の自動分離・植込システムは、植物を分離し、該分離された植物を汎用調整ステーションに渡し、前記他方の植物の自動分離・植込システムは、植物を前記調整ステーションから受け渡された植物を容器に植え込むことを特徴とする植物の自動移植ステーションである。
【0022】
なお、本発明によれば、植物だけでなく、把持することのできる脆弱物であればどのようなものでも取り扱うことが可能である。
【発明の効果】
【0023】
本発明によれば、障害物が密集した場所やインビトロ環境等の狭い作業空間において、培養した無菌の植物の分離・植込作業を自動化することができる。
【0024】
また、植物の移植を自動的に行うために必要な微少な把持力制御が容易に行うことができる。すなわち、分割又は移植する際に、植物に過剰な把持力を与えるおそれがなく、茎の導管の破壊を防ぐことができるので、分割又は移植に伴う成長障害も生じない。
【0025】
また、構造上把持部を取り外して高温高圧蒸気等で滅菌処理することが可能であり、メンテナンス性にも優れる。
【発明を実施するための最良の形態】
【0026】
本発明を具体化した実施形態を図面に基づいて説明する。
1.システム構成
図1に示すとおり、本発明に係るシステムは、統合コントローラ1とネットワークを介してつながるロボット部2、センサ部3、ハンド部4、及び搬送部5とから構成される。
ネットワークは汎用的なものでよく、例えば、イーサネット(登録商標)でハブを介して接続し、統合コントローラ1
各部2〜4にTCP/IPプロトコルでコマンド送信とアンサ受信することでシステムの制御を行う。
なお、さらにシステムの信頼性を高めるために必要に応じてRS232C通信規格に準拠した専用線を別途用意しておく。例えば、TCP/IPネットワークの障害時に非常停止の信号やコントローラの電源立ち上がり時等における準備完了信号等を送ることが可能となり、最低限の信頼性確保することができる。
以下、各部の構成を具体例で説明する。
【0027】
(1)総合コントローラ1
総合コントローラは、ロボット部2、センサ部3、ハンド部4及び搬送部5を、ネットワークを介して制御する。パソコン上のソフトウェアとして実現することが可能であり、3次元計測を行うためのライブラリ、計測機器類を制御するためのライブラリ、計測結果から形状認識を行うためのライブラリ、計測結果から測定対象の特徴を抽出し判定を行うためのライブラリを有している。
【0028】
(2)ロボット部2
ロボット部2はロボットコントローラ21とマニピュレーター22とからなり、ロボットコントローラ21は統合コンコントローラ1からの指令によりハンド部4の位置制御を行う。
少なくとも3軸の並進運動が可能(直動3軸)である必要があるが、更に3軸の姿勢変化可能なこと(6軸多関節)が望ましい。
【0029】
(3)センサ部3
センサ部3は、センサコントローラ31と、当該センサコントローラに接続された一対のステレオカメラ32と、スリット投光器33とから構成され、ステレオ撮像が可能である。遠近歪みをなくするためには、撮像光学系にあおり光学系を用いることが好ましい。すなわち、図2に示すように2台のカメラを相互に平行にしたままで、レンズ50a,50bの中心とCCD撮像素子51a,51bの中心をずらし、CCD撮像素子とレンズ中心を結んだ一対の撮像系の中心線の交点が計測対象物付近に有るようなあおり光学系を用いることによって、CCD撮像素子上に遠近ひずみのない結像画像を得ることも可能になる。あおり光学系は通常の光学系よりも左右のカメラで共通に撮像できる面積が広くなるため、ステレオ画像処理に有効な光学系である。これにより、カメラから近い位置にある対象物体であっても、正確な相対距離画像を得ることができる。
装置中央にはレーザーダイオード光源を斜めスリットパターンに発光するスリット投光器33が設置してある。斜めスリットパターンは全部で4本あり、撮像範囲のどの位置に計測対象物体が位置してもスリット光が当たるように考慮されている。
なお、視覚センサ周辺部で照明光源からの光が容器に直接反射してカメラに入光しない位置に該照明用光源、好ましくはLEDを配置するのが好ましい。
【0030】
(4)ハンド部4
ハンド部4は、ハンドコントローラ41と、アクチュエータ42と、複合作業ハンド43とからなる。図3に示すとおり、アクチュエータ42a〜cは、支持枠2内に配置され、該アクチュエータを制御するハンドコントローラ(図示せず)と、該支持枠2に取り付けられた複合作業ハンド43とで構成されている。以下各構成要素を詳細に説明する。
【0031】
a.支持枠2
支持枠2は上下の基板21,22と、それらの基板を所定の間隔に保持する4本の支持柱23とで構成されており、上方の基板21の上面にはハンド部4をロボット部2に取り付けるための取付座25が設けられ、下方の基板22には、ロッド7挿通用の貫通孔が形成されている。上下の基板21,22間には3個のアクチュエータ42a〜42cが取り付けられている。
【0032】
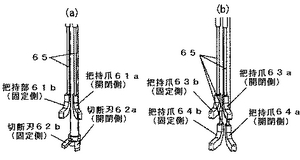
b.把持部61及び切断部62
複合作業ハンド43は、把持部構造のみが異なる分割用と植込用の2種類がある。図4の(a)は分割用ハンドの一例であり、(b)は植込用ハンドの一例である。どちらのハンドも把持力制御機構である上段把持部61,63を備えており、上段把持部はアクチュエータ42が直動することにより、上下して把持位置の調整を行うことができる。また、アクチュエータ42が回動することにより、把持部61,63、切断部62が開閉運動を行う。ハンドコントローラ41はアクチュエータ42a〜cの制御を行い、複合作業ハンド43を制御する。
把持部61,63及び64は弾性特性を有する材料65と連結されており、これにより脆弱な植物を損傷させないための微少な把持力制御が可能となっている。
また、植え込み用ハンドの場合、上段把持部だけでなく、下段把持部を上下させてもよい。特に脆弱である「把持爪から植物の茎の最下端までの距離」が長いと植込時の培地からの反力により座屈するおそれがあるが、下段把持部を上下させることにより上記距離を短くして何回かに分けて植え込むことが可能となる。すなわち、上記距離を短くしても規定量の植込量を確保出来るようにするため、上段及び下段の把持部で植物を把持した状態で植え込みをした後、下段の把持爪を解放し、下段把持爪を上に移動した後、再度下段把持爪で把持し、植え込みを行うという動作を繰り返し行うことができるのである。これにより、植え込み作業における植物の損傷を防ぐことができる。
分割用ハンド、植え込み用ハンドのどちらも上下移動部の駆動、把持力の伝達、把持部の構造は同じである。但し、分割用ハンドは切断部64が把持部63の下部に配置され、当該切断部62は力伝達経路の剛性を高め、カット時のモーメントに耐えられるようにしてある。
狭い空間で作業する場合には、把持爪に角度を付けることで、作業場所に把持爪を侵入させることが容易となる。例えば、好ましい把持爪とロッドの角度としては30°,45°,60°,90°,120°,135°があげられる。
なお、把持爪及び/又は切断刃は共に回転させてもよいし、一方を回転させない場合には他方を鞘管接合型としてもよい。
【0033】
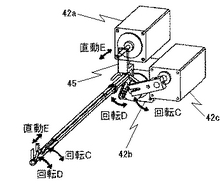
c.アクチュエータ42a〜42c
図5に示すとおり、アクチュエータ42a,42bにより把持部爪61a,61bが、アクチュエータ42cにより切断刃62aが駆動される。アクチュエータ42aの駆動軸がロッド7a,7bと同一軸方向に直動すると、支持板35から7a,7bに力が伝達され、把持部61が上下に直動する。アクチュエータ42bの駆動軸は回動し、これにより把持爪61aが開閉運動を行う。アクチュエータ42cの駆動軸は回動し、これにより切断刃62aが開閉運動を行う。
【0034】
d.鞘管5
基板22の下面に中央部には、貫通孔に合致させて鞘管5が取り付けられている。鞘管5の上部には、把持用ロッド7a,7bが貫通する孔と、切断用ロッド7cを回転可能に保持する保持孔を設けたロッド支持板が取り付けられている。
また、鞘管5の下方先端部には、把持爪及び切断刃を外方に突出させると共に、把持爪の上下動を許すスリットが形成されている。鞘管5の下端開口は着脱可能な栓によって封鎖し、鞘管内に装着したロッドが脱落するのを防いである。栓は端部を丸くして滑りやすくしておくとよい。
また、狭い場所での作業を行うためには鞘管の直径は細い方がよい。従来のように切断部だけで3〜4cmある装置では、インビトロでの作業はもちろん、植物苗が隣接する環境での移植・分割作業を行うことは難しい。本実施例にかかる装置においては、鞘管の直径は約8mm、各爪刃の長さは約6mmである。爪刃の長さは対象植物の形状、特に葉の長さと同程度に設定するとよい。
【0035】
図6に示すとおり、鞘管5は中途部分で分割されており、凸凹形状の嵌合部8で着脱可能である。バイオ苗の分離・植込作業においては、先端部を滅菌消毒可能とすることが大前提となるため、先端部が取り外せることの意義は大きい。
なお、嵌合部8での脱着を容易にし、駆動トルクにより嵌め合いがはずれないようにするため、嵌め合い部の周囲をパイプでカバーするのが好ましい。
【0036】
e.ロッド7a〜7c
鞘管5の先端の一対の把持爪61a,61bにアクチュエータの力を伝達するロッド7a,7bと、鞘管5の先端の切断刃62aにアクチュエータの力を伝達する切断用ロッド7cがある。把持用ロッド7a,7bは、アクチュエータ42aにより上下動する支持板35で保持され、把持部61はこれにより上下動可能である。把持用ロッド7bはアクチュエータ42bによって回動可能でありこれにより把持爪61aが開閉する。切断用ロッド7cもアクチュエータ42cによって回動可能であり、これにより切断刃62aが開閉し、固定刃61bと協働して対象物を切断する。把持用ロッド7a,7bおよび切断用ロッド7cのロッド支持板の上方に突出した部分には、アクチュエータ42b,42cに取り付けられた回転用アームのスリットに係合する係合部を具えたアームが形成されており、各アクチュエータの回転を各ロッドに伝える。
【0037】
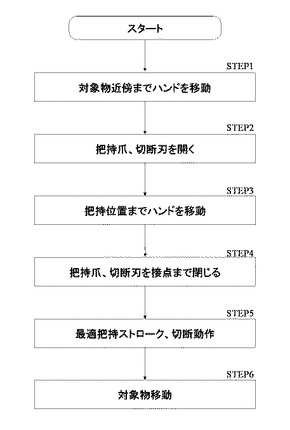
f.作動
図7に示すとおり、まず、ハンド部をX、Y、Z方向に移動させ、ハンド先端部を切断すべき対象物の近傍に移動する(STEP1)。この際、対象物の位置が予め分かっている場合には、対象物の位置計測は不要となる。ハンド先端部が対象物に対面すると、コントローラからの信号によりアクチュエータ42b,42cが回転し、把持爪61a、切断刃62bを開く(STEP2)。アクチュエータ42aを駆動して把持部61の高さを調整し、把持爪61a及び/又は61bが対象物に触れる把持位置までハンド部を移動させる(STEP3)。アクチュエータ42b,42cを逆回転させ、把持爪61a及び切断刃62aが対象物に接するまで閉じる(STEP4)。後述の計算方法により最適な把持力で対象物を把持するようにアクチュエータ42b,42cを逆回転させる(STEP5)。アクチュエータ42aを回転させ把持部61を上昇させ、切断した対象物を分離した後、ハンド部を移動する(STEP6)。
【0038】
(5)搬送部5
搬送部5は、作業前の対象物が載せられる搬入コンベアと、対象物の分離作業を行うためのロータリーテーブルと、作業後の対象物が搬出される搬出コンベアと、これらを制御する搬送コントローラから構成される。
また、検知センサを設け、該検知センサが、植物培養容器が作業位置に到達したことを検知すると搬送装置による搬入を停止する機能と、該検知センサが、植物培養容器から植物が無くなったことを検知すると搬送装置による搬出を開始する機能を有することが好ましい。
【0039】
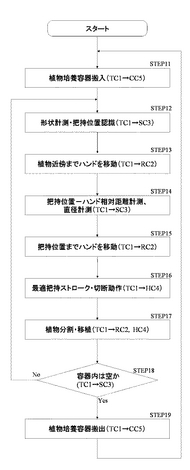
2.システム制御
本発明に係るシステムの制御フローは、図8に示すとおりである。
まず、搬送部5は総合コントローラ1からの命令により対象となる植物培養容器を作業位置まで搬送する。この際、搬送部5の検知センサ53は植物が作業位置まで移動されたかを監視し、作業位置に到達した際には、総合コントローラ1から搬送部5に停止命令が出される(STEP11)。次に、総合コントローラ1はセンサ部3に把持対象となる植物の形状の計測命令を送信し、茎の把持位置を認識する(STEP12)。その後、ロボット部2には総合コントローラ1からの命令により茎にぶつからない程度に複合作業ハンド43を把持部及び/又は切断刃を閉じた状態で植物近傍まで移動させる
(STEP13)。センサ部2はセンサコントローラ1からの命令により、茎の把持位置と複合作業ハンド43の相対距離及び茎の直径の計測し、これらの情報を取得する(STEP14)。ロボット部2は総合コントローラ1からの命令により、STEP14で取得した情報に基づき、把持位置まで複合作業ハンド43の把持部を移動させる(STEP15)。総合コントローラ1はハンド部4に対して最適把持ストローク及び/又は切断動作の命令を送信する(STEP16)。総合コントローラ1は把持した植物の分離・植込命令をロボット部2及びハンド部4に対して送信する(STEP17)。植物培養容器内に残りの植物がある場合には、STEP12に戻る(STEP18)。植物培養容器内の全ての植物の分離・植込が終了すると、容器の排出が行われSTEP11に戻る(STEP18,19)。
【0040】
3.植物の空間位置及び形状の計測
本発明では、光切断法と相対ステレオ法の組み合わせにより植物の形状や空間位置の計測を行う。
光切断法とは、計測物体に平面状のレーザー光(スリット光)を照射し、 三角測量の原理を利用して距離を計測する手法である。相対ステレオ法とは、基本的には複数のカメラを使用したステレオ視を距離計測の手法とするが、ステレオ視以外の方法で得られる画面内の基準点までの距離情報を利用し、ステレオ画像処理を行うことにより、基準点からの相対高さを計測する手法である。高速な画像処理が可能であり、カメラ間隔や取り付け角度等の外部パラメータを必要としない利点がある。
【0041】
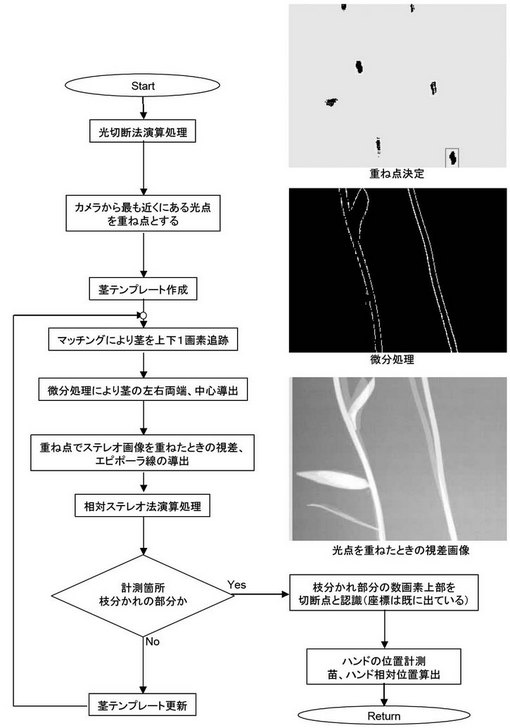
作業空間内に茎があるかの判定する際には、設定した範囲の太さの茎が、設定した立体空間範囲の中にあるかをスリット光が茎上で反射している特徴を識別し、光切断法により位置計測をすることで判定を行う。作業空間範囲の中に茎が検出されると、その茎のどの位置が把持位置として適しているかを検出する。具体的には、茎の光点位置から追跡して分岐点を判断し、その上部で葉が存在しない部分を切り出し点とする。
切り出し点が分かった後に、複合作業ハンド43を近傍まで移動させることで、相対ステレオ方法により把持位置とハンドとの間の相対距離を算出することができる。これにより、複合作業ハンド43の残移動量がわかることになる。
【0042】
把持位置を認識するための空間位置及び形状の計測方法について、以下具体例で説明する。
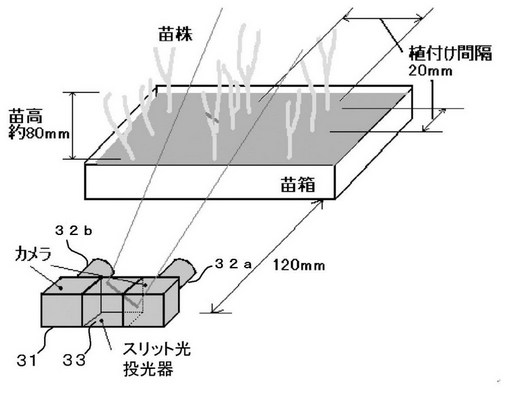
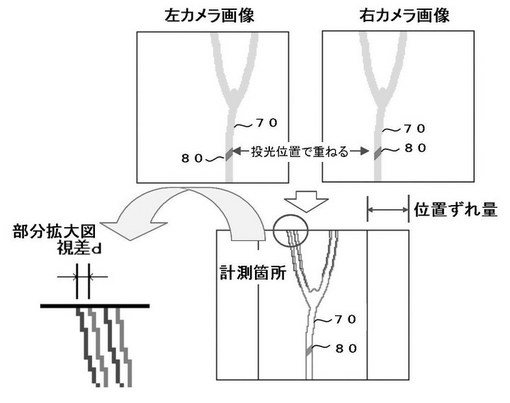
図9に示すように、多数の幼芽が間隔を保って植え付けられた育苗床に、横からセンサを近づけ、スリット光を投光する。ここで、スリット光は複数のスリットパターンが斜め方向に平行に投影されるように作られており、光切断法による計測時には、その多数のスリット光が幼芽の茎に当たった中で、いちばん画面に近いものを選ぶ、などの手法が用いられる。このスリット光が当たった位置の空間座標は、通常のスリット光切断法を用いて高精度に決定することができる。このスリット光切断法により、左右のカメラ32aおよび32bのどちらか一方で、スリット光が当たった位置の幼芽の茎の空間位置を決定する。ここで、左右のカメラ画像でスリット光が当たった位置が一致するように、左右2枚の画像を重ね合わせる。すると、カメラからの距離が等しい茎の上の各点では画像のずれは発生しないが、茎が前後に曲がっていると、重ね合わせの結果、図10下段のように画像のずれが生じる。ここでは、画像のずれ量を視差dとして、これをもとに植物の形状や空間位置を決定する。
【0043】
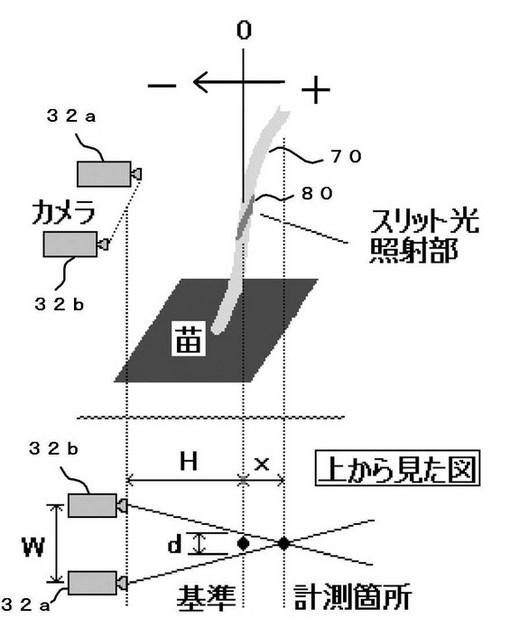
この計算方法を図11に示す。スリット光が当たった位置で、左右の画像を重ね合わせる。このとき、茎が曲がっていて幼芽が垂直に立っていなければ、スリット光投影位置に比べて茎が前後するため、ステレオ視において画像のずれを生じる。例えば、スリット光の当たった基準位置より茎が後ろにあるとき、右カメラ32aからみた左カメラ32bの対応位置が負のずれ量となる。
ここで、ずれ量(視差)d、カメラの間隔W、カメラからスリット光の当たった位置までを光切断法で測ったときの距離H、求める相対距離をxとすると、以下の式であらわされる関係が導ける。
W/(H+x)=d/x
ここで、W,Hはあらかじめ決まっている値である。幼芽上のスリット光の位置を重ね合わせることにより、画像上の各点の三次元位置を、画像のずれ量dを元に計算できる。
また、上記のようにしてxが求まっていれば、カメラからの距離は(H+x)で求められるので、カメラの各画素が見ている位置が、空間中でどの点を通るかをキャリブレーションであらかじめ求めておけば、3次元位置を求めることも可能である。
【0044】
図9、図10に示すような植物の茎の計測においては、まずスリット光の当たった基準点の座標点が求まる。これを基準点として、本発明に係るシステムを用いることで、図10の画像について、茎の方向に沿ったすべての画素位置で、その基準点からの距離の差(相対距離)が求められる。
【0045】
4.把持用アクチュエータの制御
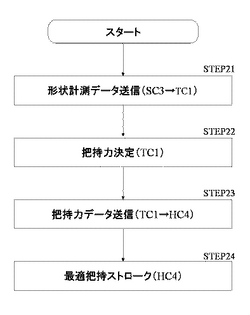
図12は、把持用アクチュエータへの指令送信プロセスである。
センサコントローラ31は、計測した苗直径データを総合コントローラ1に送信する(STEP21)。総合コントローラ1は、受信した苗直径データをもとに、予め設定された変換テーブルを検索して把持力エリアNoを決定する(STEP22)。総合コントローラ1は、エリアNoをハンドコントローラ41へ送信する(STEP23)。モータコントローラは、支持されたエリアNoから固有の変換テーブルを参照し、必要なパルス量をアクチュエータ42に送信する(STEP24)。
【0046】
5.把持力の算出
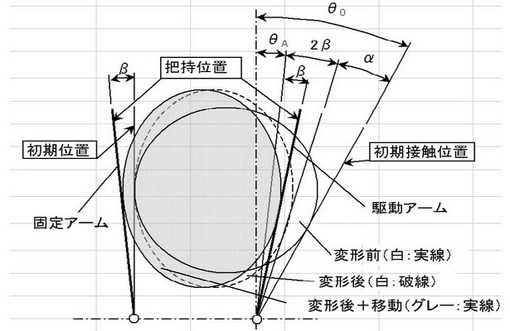
把持爪に段階的に把持力を与えた際の、対象物と把持爪の位置変化モデルを示したものが図13である。本発明の把持装置においては、ロッドの一部が弾性特性を有する材料から構成されているため、把持力を強めると共に、左右把持爪の位置も移動する。左右の弾性特性を有する材料のねじれのバランスが取れ、且つ把持対象物が損傷しないように、ロッドに回転角度を与えることで最適把持力を得ることができる。
【0047】
把持爪83における力伝達経路での変形モデルは図14のようになる。ここで設定した把持力Fを与える際の弾性特性を有する材料の弾性変形量δとなり、式5及6から算出される。これに対応する最適ひねり角度θは式7から算出することができ、この回転を制御レバー81に与えることで脆弱物を把持するための最適把持力を得ることができる。
【数4】
F:把持力、δ:弾性変形量(撓み量)、E:縦弾性係数、l:弾性特性を有する材料長さ、I:断面2次モーメント
【数5】
d:弾性特性を有する材料の直径
【数6】
θ:最適ひねり角度、L:ロッド軸中心線から対象物把持位置までの最小距離
【0048】
例えば35グラムを把持したい場合の追い込みストロークθは、l=35、d=0.9、L=6で考えると、
δ=(0.035・353)/(3・19900・(π・0.94/64))=0.78mm
θ=Sin-1(δ/L)=7.47°となる。
【0049】
設定レンジは±5gなので上限、下限でのストロークは40グラムであり、
δ=(0.04・353)/(3・19900・(π・0.94/64))=0.89mm
θ=Sin-1(δ/L)=8.56°となる。
【0050】
同様に、上限のストロークは30グラムであり、
δ=(0.03・353)/(3・19900・(π・0.94/64))=0.67mm
θ=Sin-1(δ/L)=6.41°となる。
ステップモータの最小制御角度は0.5°であり、減速機を付加することでさらに細かい位置決め要求に対応する制御を行うことが可能である。
【0051】
ロッドに弾性特性を利用する材料を用いず、駆動部近傍にトーションバネを用いた弾性体を配置してもよい。図15に示すようにトーションバネ90の一方をロッド7と接合し、他方を制御レバー81と接合することでロッド7に回転を生じさせることができる。把持爪が対象物に当接後さらに回転を加えることでトーションバネに変形が生じ、その結果把持部に最適な把持力が発生する。
【0052】
例えば、予め設定した把持力Fを得るために、必要な把持爪が当接した点からのトーションバネのねじれ角度φは、下記式で求めることができる。
【0053】
M=F・a
M:トーションバネに作用するモーメント、a:中心から把持爪までの長さ
【0054】
φ=ML/EI=64MDN/Ed4
L:トーションバネの有効展開部長さ、E:縦弾性係数、D:コイル平均径、N:巻き数、d:線径、I:断面2次モーメント
【0055】
以下、本発明の実施例を図面に基づいて具体的に説明する。ただし、本発明は下記のものに限定されない。
【実施例1】
【0056】
1.システム構成
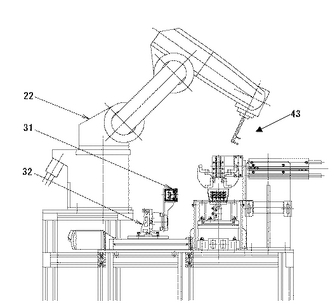
本実施例に係るシステムの構成は、図16に示すとおり、マニピュレーター22とその先端に連結された複合作業ハンド43と、ステレオカメラ31とセンサコントローラ32とから構成される。
マニピュレーター22は、三菱電機株式会社のRV-6S(6軸多関節・可搬5kg)を、アクチュエータ42(図示せず)はオリエンタルモーター株式会社のものを使用した。ステレオカメラ32の解像度はVGA、格子間隔は10mmであり、光学系はあおり光学系である。複合作業ハンド43は、上段に一対の把持爪からなる把持部と下段に一対の切断刃からなる切断部を有している。容器内での動作を考慮し複合作業ハンド43は、直径8mmのパイプ内に全ての駆動系を内蔵し、かつ滅菌対応のための把持部取り外しを可能、且つ高温高圧蒸気滅菌に耐えられる構造とした。把持部開閉時にアクチュエータ42からの力を伝達するする弾性材料には、ステンレスを採用した。
【0057】
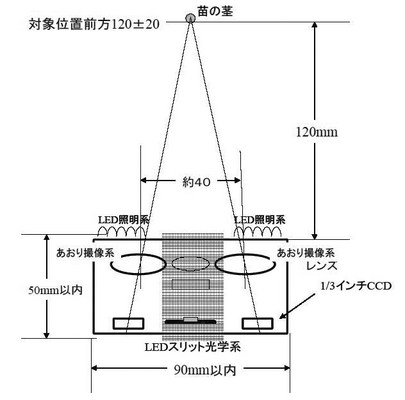
図17に本実施例に係るセンサ部3の基本構造を示す。
おおり光学系の結像位置に2台の1/3CCDボードカメラを置く。中央にはLED発光部と、スリット光化のためのレンズ系などが組み込まれている。また、センサ部の前にステレオ撮像のためのLED照明系を設けている。
なお、好ましくはスリット光の生成装置としては上記LED以外にもレーザーダイオードとロッドレンズを組み合わせた構成を用いてもよい。
【0058】
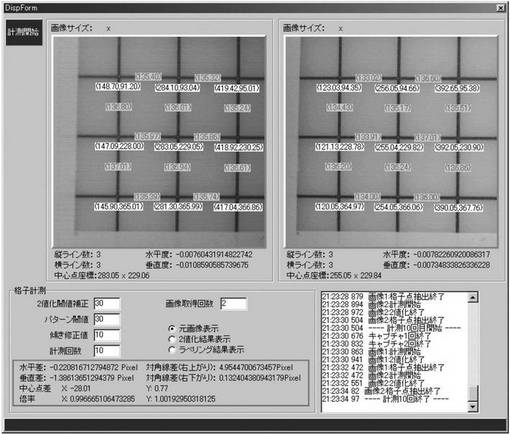
図18は、キャリブレーションプレートを基準位置に置いた場合における左右のカメラの中心点からのX,Y 方向計測誤差データである。格子の交差点のCCD上での座標値を計測し、隣接する格子点間の距離をピクセル数で表示している。本実施例においては、レンズ収差補正を行わなくともよく左右のカメラのX,Y方向の認識誤差は多くとも3ピクセルの範囲であったため後で特徴点(茎部)をパターンマッチングにより位置計測を行う際に探索範囲を非常に小さくでき(上下方向で3ピクセルの範囲を探索すれば左右双方の画像に同一点が存在することになり)高速に判定できる。
【0059】
2.植物の位置計測
植物の位置計測は、4本のスリットラインのどれかが茎の上で交差することを利用して、予め設定したアルゴリズムにより茎上にある最適な光点を選び、光切断法でこの位置を計測した。次に、左右2枚の画像の光点を同一位置で重ね合わせたと仮定する。左右の濃淡画像のX軸方向の微分画像を2値化し、茎のみを出現させた画像からそれぞれの画像での茎上の同一点を認識する。その視差量から奥行き方向での光点からの茎中心までの距離を計算する。そしてさらに光点からハンドの軸中心位置までの奥行き方向の距離と、光点から把持部または切断部までの左右どちらかのカメラの2次元画像位置から水平垂直方向の距離を計算することで把持部と切り出し点までの空間距離を計算し、認識結果を統合コントローラに送信する。これがハンドの残移動量となる。さらに切り出し点での奥行き寸法がわかることで、その茎部分の水平方向の茎直径を計測し把持力制御のためのパラメータとした。
【0060】
3.画像処理
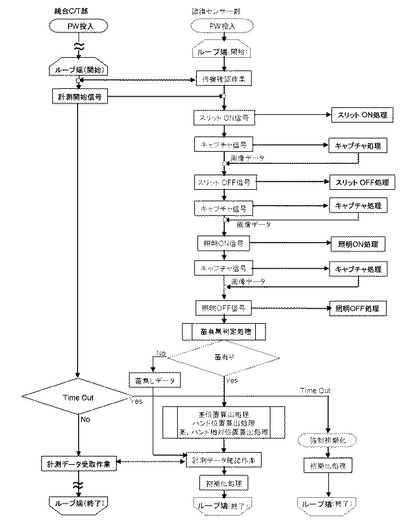
図19は、センサ部の基本処理の全体フローの概要である。まず、スリット光投影を行うが、周囲が明るい場合、当てた画像だけでは、スリット光の交点の位置が明確に求まらないので、当てない画像との差画像を求めて、スリット光の当たった位置を安定に求めている。その後、相対ステレオ画像処理をするための画像入力のために、LED照明を点灯し、画像入力する。
【0061】
図20は、画像入力後の相対ステレオ処理を用いた茎位置検出処理フローである。
差画像処理で光点位置を検出した後、画像を微分処理し、微分エッジが茎の太さで並行になっている部分を茎とする。左右の画像を、光点位置で重ね合わせ、微分処理で茎であると決めた部分で画像のずれ量を検出し、相対距離を求め、それをもとに茎中心の空間座標値(Xi,Yi,Zi)を計算する。この後、枝分かれ部分を探して、ロボットを位置決めする点を決定する。
【0062】
4.苗強度の測定
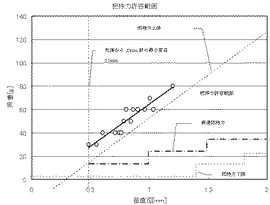
本発明に係るシステムの最適な把持力の範囲を算出するために、ユーカリの幼芽を用いて苗強度の実験を行った。最適な把持力の範囲の算出は、幼芽の茎に徐々に力を加え、幼芽の直径と細胞の破壊による水浸化状の変色が起こる力を計測することで行う。
図21は、ユーカリの幼芽における実験結果であり、丸が打たれた箇所が苗に損傷が発生した荷重を示している。この結果から力制御の要求仕様は次表のようになる。
【0063】
【表1】
5.動作実験
直径をi)0.5から0.9mm、ii)1から1.5mm のユーカリの幼芽各20本について、下記表の要領で自動植込みを行ったところ、変色発生の頻度は0本であり、力制御の困難なクローン苗の自動植込みを実現することができた。
【表2】
【実施例2】
【0064】
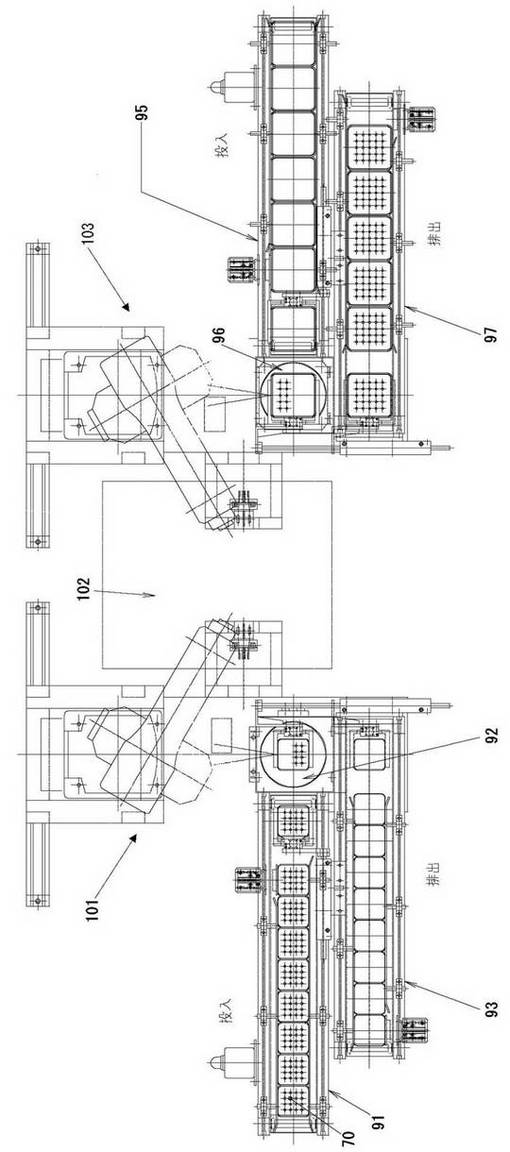
図22は、実施例2に係るシステム構成図である。分離ステーション101は、総合コントローラ、ロボット部、センサ部、及びハンド部から構成され、搬入コンベア91により搬送される幼芽の分離作業をロータリーテーブル92で行い、調整ステーション102へ渡す。全ての幼芽が分離された容器は、搬出コンベア93により排出される。
【0065】
調整ステーション101は、汎用的なものであり、分割した一本のシュート(幼芽)の長さをそろえる(茎カット)工程、葉の枚数をそろえる(枝カット)工程、葉の面積をそろえる(葉をカット)工程を有する。
なお、単に分割して取り出した長さによって、数種類に区分分けしてそれぞれ別の発根容器に植えるための判定を行うものでもよい。
【0066】
植込ステーション102では、調整ステーション101で調整した幼芽をオアシス等の発根用培地が敷設された容器への植込作業を行う。オアシス等の敷設された容器は、搬入コンベア95により搬送され、ロータリーテーブル96での容器への植込作業が終了すると、該容器は搬出コンベア97により排出される。
【図面の簡単な説明】
【0067】
【図1】本発明に係るシステムの概略構成図である。
【図2】あおり光学系の説明図である。
【図3】一対の把持爪と切断部を有するハンド部の図面である。
【図4】複合作業ハンドの先端部の説明図である。
【図5】アクチュエータの構成を説明する図面である。
【図6】鞘管の嵌合部の拡大図面である。
【図7】一対の把持爪と切断部を有するハンド部の作動の流れ図である。
【図8】本発明に係るシステムの制御フロー図である。
【図9】植物形状の計測の様子を示す図面である。
【図10】植物形状の計測方法を示す図面である。
【図11】植物形状の計算方法を示す図面である。
【図12】把持用アクチュエータへの指令送信プロセスである。
【図13】対象物と把持爪の位置変化モデルである。
【図14】把持爪の一方における力伝達経路での変形モデルである。
【図15】駆動部近傍にトーションバネを用いたハンド部の図面である。
【図16】本実施例に係るセンサ部3の基本構造図である。
【図17】左右のカメラの中心点からのX,Y 方向計測誤差データである。
【図18】把持用モータへの指令送信プロセスである。
【図19】センサ部の基本処理の全体フローの概要である。
【図20】画像入力後の相対ステレオ処理を用いた茎位置検出処理フローである。
【図21】ユーカリの幼芽における把持力許容範囲の実験結果である。
【図22】実施例2に係るシステム構成図である。
【符号の説明】
【0068】
31 ステレオカメラ
33 スリット光投光器
45 支持板
50 レンズ
51 CCD撮像素子
70 幼芽
80 スリット光照射部
81 制御レバー
82 固定レバー
90 トーションバネ
91,95 搬入コンベア
92,96 ロータリーテーブル
93,97 搬出コンベア
101 分離ステーション
102 調整ステーション
103 植込ステーション
【特許請求の範囲】
【請求項1】
ロボット部と、センサ部と、先端に把持爪を有し、一部又は全部が弾性特性を有するロッドを備えたハンド部と、各部を制御する総合コントローラとからなる植物の自動分割システムであって、
前記センサ部が植物の形状を計測する第1のステップと、
第1のステップの計測結果に基づき前記ロボット部が前記ハンド部を移動させる第2のステップと、
前記センサ部が前記ハンド部と植物の相対距離を計測する第3のステップと、
前記把持爪が植物と当接するまでハンド部を移動させる第4のステップと、
前記ロッドに撓みを生じさせる第5のステップを有することを特徴とする植物の自動分離・植込システム。
【請求項2】
前記第1のステップは、光切断法により植物表面の一部の位置を計測し、相対ステレオ法により把持位置を認識することを特徴とする請求項1の植物の自動分離・植込システム。
【請求項3】
前記ロッドは、円柱形状であり、
前記第5のステップは、下記式1ないし3により植物と把持爪が接した時点から、予め設定した把持力を与えるための把持爪の回転角度を算出することを特徴とする請求項1又は2の植物の自動分離・植込システム。
【数1】
F:把持力、δ:弾性変形量(撓み量)、E:縦弾性係数、l:弾性特性を有する材料長さ、I:断面2次モーメント
【数2】
d:弾性特性を有する材料の直径
【数3】
θ:最適ひねり角度、L:ロッド軸中心線から対象物把持位置までの最小距離
【請求項4】
更に、前記ハンド部は、先端に切断刃を有し、
前記第5のステップにおいて、更に、該切断刃により植物を切断することを特徴とする請求項1ないし3のいずれかの植物の自動分離・植込システム。
【請求項5】
前記植物は、作業孔のある密閉型植物培養容器で培養された植物であることを特徴とする請求項1ないし4のいずれかの植物の自動分離・植込システム。
【請求項6】
更に、搬送コントローラと、検知センサと、搬送装置とからなる搬送部を有し、
前記第1のステップの前に、搬送部が植物培養容器を搬入するステップと、
前記第5のステップの後に、搬送部が植物培養容器を搬出するステップを有することを特徴とする請求項1ないし5のいずれかの植物の自動分離・植込システム。
【請求項7】
前記検知センサが、植物培養容器が作業位置に到達したことを検知すると、前記搬送コントローラが搬送装置による植物培養容器の搬入を停止する機能と、
前記検知センサが、植物培養容器から植物が無くなったことを検知すると、前記搬送コントローラが、搬送装置による植物培養容器の搬出を開始する機能を有することを特徴とする請求項6の植物の自動分離・植込システム。
【請求項8】
前記搬送コントローラは、予め定められた移植作業が終了すると、搬送装置を稼働して移植作業の終了した植物培養容器を搬出し、空の植物培養容器を搬入する機能を有することを特徴とする請求項6又は7の植物の自動分離・植込システム。
【請求項9】
植物の直径に応じて予め設定された把持力を与えることを特徴とする請求項1ないし8のいずれかの植物の自動分離・植込システム。
【請求項10】
請求項1ないし9のいずれかの植物の自動分離・植込システムを2式と、汎用調整ステーションとからなる植物の自動移植ステーションであって、
前記一方の植物の自動分離・植込システムは、植物を分離し、該分離された植物を汎用調整ステーションに渡し、
前記他方の植物の自動分離・植込システムは、植物を前記調整ステーションから受け渡された植物を容器に植え込むことを特徴とする植物の自動移植ステーション。
【請求項1】
ロボット部と、センサ部と、先端に把持爪を有し、一部又は全部が弾性特性を有するロッドを備えたハンド部と、各部を制御する総合コントローラとからなる植物の自動分割システムであって、
前記センサ部が植物の形状を計測する第1のステップと、
第1のステップの計測結果に基づき前記ロボット部が前記ハンド部を移動させる第2のステップと、
前記センサ部が前記ハンド部と植物の相対距離を計測する第3のステップと、
前記把持爪が植物と当接するまでハンド部を移動させる第4のステップと、
前記ロッドに撓みを生じさせる第5のステップを有することを特徴とする植物の自動分離・植込システム。
【請求項2】
前記第1のステップは、光切断法により植物表面の一部の位置を計測し、相対ステレオ法により把持位置を認識することを特徴とする請求項1の植物の自動分離・植込システム。
【請求項3】
前記ロッドは、円柱形状であり、
前記第5のステップは、下記式1ないし3により植物と把持爪が接した時点から、予め設定した把持力を与えるための把持爪の回転角度を算出することを特徴とする請求項1又は2の植物の自動分離・植込システム。
【数1】
F:把持力、δ:弾性変形量(撓み量)、E:縦弾性係数、l:弾性特性を有する材料長さ、I:断面2次モーメント
【数2】
d:弾性特性を有する材料の直径
【数3】
θ:最適ひねり角度、L:ロッド軸中心線から対象物把持位置までの最小距離
【請求項4】
更に、前記ハンド部は、先端に切断刃を有し、
前記第5のステップにおいて、更に、該切断刃により植物を切断することを特徴とする請求項1ないし3のいずれかの植物の自動分離・植込システム。
【請求項5】
前記植物は、作業孔のある密閉型植物培養容器で培養された植物であることを特徴とする請求項1ないし4のいずれかの植物の自動分離・植込システム。
【請求項6】
更に、搬送コントローラと、検知センサと、搬送装置とからなる搬送部を有し、
前記第1のステップの前に、搬送部が植物培養容器を搬入するステップと、
前記第5のステップの後に、搬送部が植物培養容器を搬出するステップを有することを特徴とする請求項1ないし5のいずれかの植物の自動分離・植込システム。
【請求項7】
前記検知センサが、植物培養容器が作業位置に到達したことを検知すると、前記搬送コントローラが搬送装置による植物培養容器の搬入を停止する機能と、
前記検知センサが、植物培養容器から植物が無くなったことを検知すると、前記搬送コントローラが、搬送装置による植物培養容器の搬出を開始する機能を有することを特徴とする請求項6の植物の自動分離・植込システム。
【請求項8】
前記搬送コントローラは、予め定められた移植作業が終了すると、搬送装置を稼働して移植作業の終了した植物培養容器を搬出し、空の植物培養容器を搬入する機能を有することを特徴とする請求項6又は7の植物の自動分離・植込システム。
【請求項9】
植物の直径に応じて予め設定された把持力を与えることを特徴とする請求項1ないし8のいずれかの植物の自動分離・植込システム。
【請求項10】
請求項1ないし9のいずれかの植物の自動分離・植込システムを2式と、汎用調整ステーションとからなる植物の自動移植ステーションであって、
前記一方の植物の自動分離・植込システムは、植物を分離し、該分離された植物を汎用調整ステーションに渡し、
前記他方の植物の自動分離・植込システムは、植物を前記調整ステーションから受け渡された植物を容器に植え込むことを特徴とする植物の自動移植ステーション。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図12】
【図16】
【図19】
【図21】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図17】
【図18】
【図20】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図12】
【図16】
【図19】
【図21】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図17】
【図18】
【図20】
【図22】
【公開番号】特開2006−42686(P2006−42686A)
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願番号】特願2004−228743(P2004−228743)
【出願日】平成16年8月4日(2004.8.4)
【出願人】(304028346)国立大学法人 香川大学 (285)
【出願人】(502407130)株式会社プレックス (75)
【出願人】(396005014)宝田電産株式会社 (8)
【Fターム(参考)】
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願日】平成16年8月4日(2004.8.4)
【出願人】(304028346)国立大学法人 香川大学 (285)
【出願人】(502407130)株式会社プレックス (75)
【出願人】(396005014)宝田電産株式会社 (8)
【Fターム(参考)】
[ Back to top ]