
検体処理装置および検体処理システム
【課題】検体を収容した検体容器を搬送する外部の搬送ラインが停止した場合でも、検体の処理を継続して行うことが可能な検体処理装置を提供する。
【解決手段】この分析装置(検体処理装置)140は、血液検体を処理する血液凝固測定装置1と、血液凝固測定装置1に血液検体を供給するための供給位置2aに、血液検体を収容した検体容器150を搬送する搬送装置2とを備えている。そして、搬送装置2は、外部に設けられた搬送ライン120によって搬送される検体容器150を受け取って搬送するオンラインモードと、搬送ライン120から独立して検体容器150を搬送するオフラインモードとで動作可能である。
【解決手段】この分析装置(検体処理装置)140は、血液検体を処理する血液凝固測定装置1と、血液凝固測定装置1に血液検体を供給するための供給位置2aに、血液検体を収容した検体容器150を搬送する搬送装置2とを備えている。そして、搬送装置2は、外部に設けられた搬送ライン120によって搬送される検体容器150を受け取って搬送するオンラインモードと、搬送ライン120から独立して検体容器150を搬送するオフラインモードとで動作可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検体処理装置および検体処理システムに関し、特に、検体を収容した検体容器を備えた検体処理装置および検体処理システムに関する。
【背景技術】
【0002】
従来、検体の検査の効率化を図るために、複数の分析装置(検体処理装置)と、それらの分析装置に検体を搬送するための搬送ラインとを接続した検体処理システムが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、検体を収容した検体容器を複数の分析装置に沿って搬送ラインにより搬送しながら、その検体容器内の検体を分析装置に供給することにより、検体検査を自動的に行う検体検査システムが開示されている。この特許文献1には、爪部材を用いて搬送ライン上の検体容器を分岐コンベア上に引き込んだ後、移載装置を用いて分岐コンベアと分析装置の専用ラックとの間で検体容器を移動させることによって、分析装置に検体を供給する技術や、分岐コンベア上の検体容器を直接取り出して検体を分析する分析装置が開示されている。また、特許文献1には、搬送ライン上の検体容器を把持するとともに、針により検体容器内の検体を分注して、分析装置に検体を供給するサンプル装置が開示されている。
【0004】
【特許文献1】特開平7−239333号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に開示された従来の検体検査システムでは、搬送ラインが故障などにより停止した場合には、搬送ラインにより検体容器が搬送されないので、分岐コンベアまたはサンプル装置によって分析装置に検体を供給するのが困難になるという不都合がある。このため、搬送ラインが復旧するまで検体の検査を中断する必要があるという問題点がある。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、検体を収容した検体容器を搬送する外部の搬送ラインが停止した場合でも、検体の処理を継続して行うことが可能な検体処理装置および検体処理システムを提供することを目的とする。
【課題を解決するための手段および発明の効果】
【0007】
上記目的を達成するために、この発明の第1の局面による検体処理装置は、検体を処理する検体処理ユニットと、検体処理ユニットに検体を供給するための供給位置に、検体を収容した検体容器を搬送する搬送ユニットとを備え、搬送ユニットは、外部に設けられた搬送ラインによって搬送される検体容器を受け取って搬送する第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能である。
【0008】
この第1の局面による検体処理装置では、上記のように、搬送ユニットを、外部に設けられた搬送ラインによって搬送される検体容器を受け取って搬送する第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能に構成することによって、第2モードにより搬送ユニットを搬送ラインから独立して動作させることができるので、搬送ラインが故障などにより停止した場合でも、第2モードに設定することにより、検体処理ユニットへの検体の供給位置に検体容器を搬送することができる。その結果、搬送ラインが故障などにより停止した場合でも、検体の処理を継続して行うことができる。
【0009】
上記第1の局面による検体処理装置において、好ましくは、搬送ユニットは、第1モードにおいて、搬送ユニットの第1初期位置から供給位置を通って第1初期位置に戻る経路で検体容器を搬送し、検体容器の搬送ラインからの受取りと、検体容器の搬送ラインへの受渡しとが第1初期位置で行われる。このように構成すれば、第1モードにおいて、搬送ラインからの検体容器の受取りと、搬送ラインへの検体容器の受渡しとを同一の第1初期位置で行うことができるので、搬送ユニットと搬送ラインとの間で検体容器の移載を行う機構を簡略化することができる。
【0010】
この場合、好ましくは、搬送ユニットは、第1モードにおいて、複数の検体容器を収容可能なラックを第1初期位置に停止させ、ラックに複数の検体容器が収容された後、ラックを供給位置に搬送する。このように構成すれば、複数の検体容器をラックに収容した状態で検体処理ユニットへの供給位置に搬送することができるので、複数の検体容器を一度に搬送することができる。
【0011】
上記第1の局面による検体処理装置において、好ましくは、搬送ユニットは、第2モードにおいて、搬送ユニットの第2初期位置から供給位置を通って第2初期位置とは異なる所定位置まで検体容器を搬送する。このように構成すれば、搬送ラインから独立して検体容器を搬送する第2モードにおいて、処理済の検体容器を第2初期位置とは異なる所定位置にストックしながら、第2初期位置に未処理の検体容器をセットすることができる。
【0012】
この場合、好ましくは、第2初期位置とは異なる所定位置は、検体処理ユニットへの検体の供給が終了した検体容器をストックするための処理済容器ストック位置である。このように構成すれば、第2モードにおいて、供給位置を通過した検体容器が処理済容器ストック位置に搬送されてストックされるので、1つの検体容器の処理が終了する毎に、使用者が搬送ユニットから処理済の検体容器を除去する必要がない。これにより、第2モードの検体処理における使用者の負担を軽減することができる。
【0013】
上記搬送ユニットに設定された第2初期位置を含む構成において、好ましくは、第2初期位置は、検体処理ユニットへの検体の供給が行われていない検体容器をストックするための未処理容器ストック位置である。このように構成すれば、検体処理ユニットへの検体の供給が行われていない検体容器を未処理容器ストック位置にストックすることができるので、所定の数の検体容器をまとめて搬送ユニットにセットすることができる。これにより、1つの検体容器の処理が終了する毎に、使用者が搬送ユニットに検体容器を補充する必要がないので、第2モードの検体処理における使用者の負担を軽減することができる。
【0014】
上記第1の局面による検体処理装置において、好ましくは、搬送ユニットは、環状の搬送路を含み、第1モードにおいて、複数の検体容器を環状の搬送路上を搬送する。このように構成すれば、検体容器を搬送する搬送路を環状に形成することによって、第1モードにおいて、容易に、検体容器を第1初期位置から供給位置を通って第1初期位置に戻る経路で循環して連続的に搬送することができる。
【0015】
この場合、好ましくは、環状の搬送路は、平面的に見て四角形状の搬送路である。このように構成すれば、環状の搬送路を直線経路のみで構成することができるので、搬送ユニットの構成を簡略化することができる。
【0016】
上記第1の局面による検体処理装置において、好ましくは、検体処理ユニットおよび搬送ユニットの少なくとも一方は、第1モードと第2モードとを切り替える切替手段を含む。このように構成すれば、切替手段により、容易に、第1モードと第2モードとの切替を行うことができる。
【0017】
上記第1の局面による検体処理装置において、好ましくは、検体処理ユニットは、少なくとも検体処理ユニットを制御するための第1制御部を含み、搬送ユニットは、少なくとも搬送ユニットを制御するための第2制御部を含む。このように構成すれば、搬送ユニットの動作の少なくとも一部が第2制御部によって制御されるので、検体処理ユニットおよび搬送ユニットの制御を第1制御部のみで行う場合に比べて、第1制御部の負担を軽減することができる。
【0018】
この場合、好ましくは、第1制御部は、検体処理ユニットおよび搬送ユニットを制御し、第1モードにおける搬送ユニットの動作は、第1制御部および第2制御部によって制御される。このように構成すれば、第1モードにおける搬送ユニットの動作を第1制御部と第2制御部とによって制御することができるので、第1制御部の負担を軽減することができる。
【0019】
上記検体処理ユニットおよび搬送ユニットがそれぞれ第1制御部および第2制御部を含む構成において、好ましくは、第1制御部は、検体処理ユニットおよび搬送ユニットを制御し、第1モードにおける搬送ユニットの動作は、第1制御部および第2制御部によって制御され、第2モードにおける搬送ユニットの動作は、第1制御部によって制御される。このように構成すれば、第1モードにおける第1制御部の負担を軽減することができるとともに、第2モードにおける搬送ユニットの動作を検体処理ユニット側で制御することができる。
【0020】
この発明の第2の局面による検体処理システムは、検体を処理する検体処理ユニットと、検体処理ユニットに検体を供給するための供給位置に検体を収容した検体容器を搬送する搬送ユニットとを含む検体処理装置と、外部に設けられた搬送ラインによって搬送される検体容器を搬送ユニットに移動させるとともに、搬送ユニットによって搬送される検体容器を搬送ラインに移動させる検体移載装置とを備え、搬送ユニットは、搬送ラインによって搬送される検体容器を、検体移載装置を介して受け取って搬送した後、検体移載装置を介して搬送ラインに受け渡す第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能である。
【0021】
この第2の局面による検体処理システムでは、上記のように、搬送ユニットを、外部に設けられた搬送ラインによって搬送される検体容器を受け取って搬送した後、搬送ラインに受け渡す第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能に構成することによって、第2モードにより搬送ユニットを搬送ラインから独立して動作させることができるので、搬送ラインが故障などにより停止した場合でも、第2モードに設定することにより、検体処理ユニットへの検体の供給位置に検体容器を搬送することができる。その結果、搬送ラインが故障などにより停止した場合でも、検体の処理を継続して行うことができる。また、検体移載装置を用いて、外部に設けられた搬送ラインによって搬送される検体容器を搬送ユニットに移動させるとともに、搬送ユニットによって搬送される検体容器を搬送ラインに移動させることによって、搬送ラインに対する検体処理装置の配置を変更したとしても、検体移載装置により容易に対応することができるので、検体処理システムの配置の自由度を向上させることができる。
【0022】
上記第2の局面による検体処理システムにおいて、好ましくは、搬送ユニットは、第1モードにおいて、検体容器を収容するためのラックが搬送ユニットの初期位置に存在する場合に、ラックが搬送ユニットの初期位置に存在することを検体移載装置に通知する。このように構成すれば、第1モードにおいて、ラックが搬送ユニットの初期位置に存在することの通知を受けた検体移載装置は、容易に、搬送ラインによって搬送される検体容器を搬送ユニットの初期位置に存在するラックに収容することができる。また、検体移載装置に、ラックが搬送ユニットの初期位置に存在することを通知することによって、搬送ユニットの初期位置にラックがない場合に、検体移載装置が誤って検体容器を搬送ユニットに移動するのを防止することができる。
【0023】
この場合、好ましくは、搬送ユニットは、検体移載装置から検体容器のラックへの移載の完了の通知を受けたことに応答して、ラックを初期位置から供給位置に搬送する。このように構成すれば、検体移載装置による検体容器のラックへの移載が完了する前に、搬送ユニットが誤ってラックの搬送を開始するのを防止することができる。
【0024】
この発明の第3の局面による検体処理システムは、検体を収容した検体容器を搬送する搬送ラインと、搬送ラインによって搬送される検体容器を受け取って処理する検体処理装置とを備え、検体処理装置は、検体を処理する検体処理ユニットと、検体処理ユニットに検体を供給するための供給位置に、検体容器を搬送する搬送ユニットとを含み、搬送ユニットは、搬送ラインによって搬送される検体容器を受け取って搬送する第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能である。
【0025】
この第3の局面による検体処理システムでは、上記のように、搬送ユニットを、搬送ラインによって搬送される検体容器を受け取って搬送する第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能に構成することによって、第2モードにより搬送ユニットを搬送ラインから独立して動作させることができるので、搬送ラインが故障などにより停止した場合でも、第2モードに設定することにより、検体処理ユニットへの検体の供給位置に検体容器を搬送することができる。その結果、搬送ラインが故障などにより停止した場合でも、検体の処理を継続して行うことができる。
【発明を実施するための最良の形態】
【0026】
以下、本発明の実施形態を図面に基づいて説明する。
【0027】
図1は、本発明の一実施形態による検体処理システムの全体構成を示した概略図である。図2および図3は、図1に示した一実施形態による検体処理システムにおける分析装置の構成を示した図である。図4は、図1に示した一実施形態による検体処理システムにおける検体移載装置の構成を示したブロック図であり、図5は、図4に示した検体移載装置のハンド機構を示した斜視図である。図6〜図9は、図2に示した一実施形態による検体処理システムにおける分析装置の制御を示したフローチャートである。まず、図1を参照して、本発明の一実施形態による検体処理システム100の全体構成について説明する。
【0028】
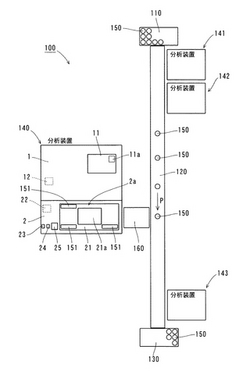
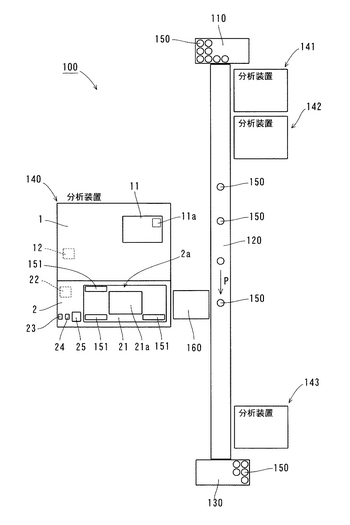
本発明の一実施形態による検体処理システム100は、図1に示すように、検体容器セット部110と、搬送ライン120と、処理済検体容器収容部130と、4つの分析装置140、141、142および143とにより構成されている。検体容器セット部110は、搬送ライン120の搬送方向(矢印P方向)の上流側の端部に配置され、未処理の検体容器150を搬送ライン120に供給するために設けられている。搬送ライン120は、検体容器セット部110から供給された検体容器150を搬送するために設けられている。処理済検体容器収容部130は、搬送ライン120の搬送方向(矢印P方向)の下流側の端部に配置され、4つの分析装置140〜143の少なくともいずれかによる分析処理が終了した検体容器150を収容するために設けられている。分析装置140〜143は、搬送ライン120によって搬送される検体容器150を搬送ライン120から受け取って処理するとともに、処理済の検体容器150を搬送ライン120に受け渡すことが可能なように構成されている。また、分析装置140〜143は、検体容器150に収容された血液検体に対して、互いに異なる分析処理を行うように構成されている。すなわち、本実施形態による検体処理システム100では、検体容器セット部110にセットされた未処理の検体容器150は、搬送ライン120により搬送されながら、4つの分析装置140〜143の少なくともいずれかにより所定の分析処理を施された後、処理済検体容器収容部130に収容されるように構成されている。
【0029】
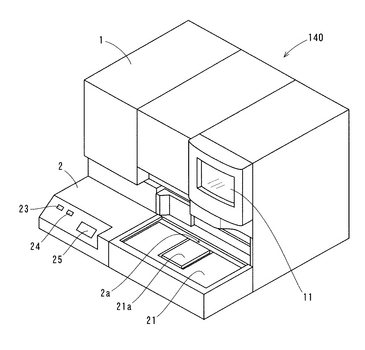
次に、図1〜図3および図5を参照して、4つの分析装置140〜143のうち、一例として分析装置140の構成について説明する。この分析装置140は、図1に示すように、搬送ライン120に検体移載装置160を介して接続されている。この分析装置140は、図2に示すように、血液凝固測定装置1と、血液凝固測定装置1の前面側に配置された搬送装置2とにより構成されている。
【0030】
血液凝固測定装置1は、検体容器150に収容されている血液検体を搬送装置2の供給位置2aにおいてピアサ(図示せず)を用いて吸引するとともに、その血液検体について複数の項目について分析を行うことが可能な自動分析型の装置である。血液凝固測定装置1には、図1および図3に示すように、タッチパネル式の操作表示部11と、測定装置側制御部12とが設けられている。操作表示部11は、タッチパネル式の表示装置であり、血液凝固測定装置1の測定開始ボタンとしてのスタートキー11aが所定のタイミングで表示されるように構成されている。また、測定装置側制御部12は、血液凝固測定装置1および搬送装置2を制御可能なように構成されている。この測定装置側制御部12は、CPU、ROM、RAMなどからなる。
【0031】
搬送装置2は、血液検体を血液凝固測定装置1に供給するために設けられている。この搬送装置2は、図3に示すように、ラック151に収容された複数(本実施形態では、10本)の検体容器150を搬送装置2の供給位置2aに搬送することにより、検体容器150内の血液検体を血液凝固測定装置1に供給する。
【0032】
ここで、本実施形態では、搬送装置2は、搬送ライン120によって搬送される検体容器150を受け取って搬送するオンラインモードと、搬送ライン120から独立して検体容器150を搬送するオフラインモードとで動作可能に構成されている。搬送装置2は、オンラインモードでは、搬送ライン120から未処理の検体容器150を受け取って供給位置2aに搬送した後、処理済の検体容器150を再び搬送ライン120に受け渡すように構成されている。また、搬送装置2は、オフラインモードでは、使用者により搬送装置2にセットされた未処理の検体容器150を供給位置2aに搬送するように構成されている。この搬送装置2は、図1および図3に示すように、複数(本実施形態では10個)の検体容器150を収容したラック151の搬送を行う搬送路21と、搬送装置側制御部22と、緊急停止ボタン23と、切替ボタン24と、表示部25とを含んでいる。搬送装置側制御部22は、オンラインモードにおける搬送装置2の動作制御を行うために設けられている。この搬送装置側制御部22は、CPU、ROM、RAMなどからなる。搬送装置2の動作は、オンラインモードにおいて、測定装置側制御部12と搬送装置側制御部22とにより制御され、オフラインモードにおいて、測定装置側制御部12により制御される。また、切替ボタン24は、オンラインモードとオフラインモードとの切り替えを行うために設けられている。この切替ボタン24が入力されると、測定装置側制御部12にモード切替が通知される。また、表示部25には、現在設定されている搬送装置2の動作モード(オンラインモードまたはオフラインモード)の表示や、搬送装置2における動作エラーの表示などが行われる。
【0033】
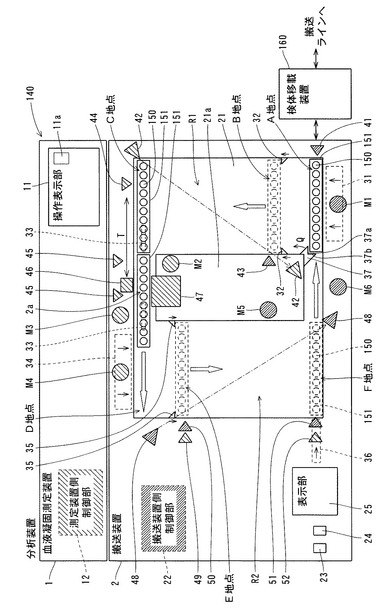
搬送路21は、図1〜図3に示すように、ラック151が中央部21aの周りを循環可能となるように環状に形成されており、平面的に見て四角形状を有している。複数の検体容器150を収容したラック151は、この搬送路21上を反時計回りの方向に搬送される。搬送路21には、図3に示すように、検体移載装置160を介して搬送ライン120との間で検体容器150の移動が行われるオンラインモードにおける初期位置をA地点として、反時計回りに順次B地点、C地点、D地点、E地点およびF地点が設けられている。また、搬送路21のC地点とD地点との間に、供給位置2aが位置するように構成されている。また、搬送路21には、未処理容器ストック領域R1と、処理済容器ストック領域R2とが設けられている。未処理容器ストック領域R1は、搬送路21上のB地点からC地点までの領域であり、処理済容器ストック領域R2は、搬送路21上のE地点からF地点までの領域である。未処理容器ストック領域R1は、オフラインモードにおいて、血液凝固測定装置1への検体の供給が行われていない未処理の検体容器150を収容したラック151をストックするために設けられている。すなわち、未処理容器ストック領域R1は、オフラインモードにおける初期位置である。また、処理済容器ストック領域R2は、オフラインモードにおいて、血液凝固測定装置1への検体の供給が終了した処理済の検体容器150を収容したラック151をストックするために設けられている。
【0034】
また、図3に示した搬送路21には、押出し部材31と、一対の搬送部材32と、一対の横送り部材33と、押出し部材34と、一対の搬送部材35と、送出し部材36と、位置規制部材37と、駆動モータM1〜M6とが設けられている。押出し部材31は、ラック151をA地点からB地点まで搬送するために設けられている。この押出し部材31は、駆動モータM1によって駆動されるように構成されている。一対の搬送部材32は、ラック151をB地点からC地点まで搬送するために設けられている。この一対の搬送部材32は、駆動モータM2によって駆動されるように構成されている。一対の横送り部材33は、C地点のラック151をD地点に所定の間隔(ラック151に収容された隣接する検体容器150間の間隔)毎に横送りするために設けられている。この一対の横送り部材33は、駆動モータM3によって駆動されるように構成されている。押出し部材34は、ラック151をD地点からE地点まで搬送するために設けられている。この押出し部材34は、駆動モータM4によって駆動されるように構成されている。一対の搬送部材35は、ラック151をE地点からF地点まで搬送するために設けられている。この一対の搬送部材35は、駆動モータM5によって駆動されるように構成されている。送出し部材36は、ラック151をF地点からA地点まで搬送するために設けられている。この送出し部材36は、駆動モータM6によって駆動されるように構成されている。位置規制部材37は、反時計回り(図3中の矢印Q方向)に回動可能に構成されており、F地点からA地点に横送りされたラック151のA地点における位置を規制するために設けられている。この位置規制部材37は、位置規制面37aおよび37bを有している。位置規制面37aは、A地点に存在するラック151が血液凝固測定装置1の方向に移動するのを防止する機能を有する。また、位置規制面37bは、A地点に存在するラック151が左方向に移動するのを防止する機能を有する。この位置規制部材37により、A地点におけるラック151の位置を規制することができるので、検体移載装置160により搬送ライン120から移動された検体容器150を容易にラック151に収容することが可能である。
【0035】
また、図3に示した搬送路21には、センサ41と、一対の光透過型のセンサ42と、センサ43および44と、一対のセンサ45と、センサ46および47と、一対の光透過型のセンサ48と、センサ49〜52とが設けられている。センサ41は、A地点の右側の搬送路21の外周部に設置されており、A地点にラック151が存在するか否かを検知するために設けられている。一対のセンサ42は、C地点の右側の搬送路21の外周部と、中央部21aの位置規制部材37の近傍とにそれぞれ設置されている。この一対のセンサ42は、未処理容器ストック領域R1にラック151が存在するか否かを検知するために設けられている。センサ43は、B地点の左側の中央部21aに設置されており、B地点にラック151が存在するか否かを検知するために設けられている。センサ44は、C地点の血液凝固測定装置1の方向の搬送路21の外周部に設置されており、C地点にラック151が存在するか否かを検知するために設けられている。一対のセンサ45は、一対の横送り部材33の間の搬送路21の外周部に、搬送方向に沿って所定の間隔を隔てて設置されている。この一対のセンサ45は、一対の横送り部材33によりC地点のラック151がD地点に横送りされているか否かを検知するために設けられている。
【0036】
また、センサ46は、供給位置2aに対応する搬送路21の外周部に設置されている。このセンサ46は、左右方向(図3のT方向)に移動可能に構成されており、ラック151に収容されている検体容器150の位置を検知するために設けられている。また、センサ46には、バーコードリーダ(図示せず)が一体的に取り付けられており、センサ46により検知された検体容器150のバーコードラベル150a(図5参照)を読み取ることが可能なように構成されている。また、図3に示したセンサ47は、供給位置2aに対応する中央部21aに設置されており、ラック151に収容された検体容器150にゴム栓150b(図5参照)が装着されているか否かを検知するために設けられている。一対のセンサ48は、D地点の左側の搬送路21の外周部と、F地点の右端に対応する搬送路21の外周部とにそれぞれ設置されている。この一対のセンサ48は、処理済容器ストック領域R2にラック151が存在するか否かを検知するために設けられている。センサ49および50は、E地点の左側の搬送路21の外周部に隣接して設置されており、E地点にラック151が存在するか否かを検知するために設けられている。センサ51および52は、F地点の左側の搬送路21の外周部に隣接して設置されており、F地点にラック151が存在するか否かを検知するために設けられている。
【0037】
ここで、本実施形態では、駆動モータM1、M5およびM6は、搬送装置2の搬送装置側制御部22により制御され、駆動モータM2、M3およびM4は、血液凝固測定装置1の測定装置側制御部12により制御される。すなわち、搬送路21に設けられている押出し部材31、一対の搬送部材35および送出し部材36の動作は、搬送装置側制御部22により制御される。また、一対の搬送部材32、一対の横送り部材33および押出し部材34の動作は、測定装置側制御部12により制御される。また、本実施形態では、センサ41、43、48、50および51は、搬送装置側制御部22に信号を出力し、センサ42、44〜47、49および52は、測定装置側制御部12に信号を出力する。
【0038】
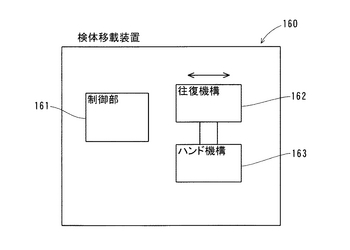
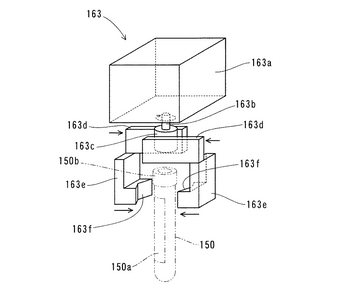
また、図3に示した検体移載装置160は、搬送ライン120の未処理の検体容器150を把持し、搬送装置2に移載するとともに、搬送装置2の処理済の検体容器150を把持し、搬送ライン120に移載する機能を有している。この検体移載装置160は、図4に示すように、制御部161と、往復機構162と、ハンド機構163とを備えている。制御部161は、CPU、ROM、RAMなどを備え、往復機構162およびハンド機構163の制御を行うための機能を有している。また、制御部161は、搬送装置2のA地点に存在するラック151への検体容器150の移載を完了すると、その旨を搬送装置側制御部22に通知する機能を有する。往復機構162は、ハンド機構163を搬送ライン120と分析装置140との間で移動させるために設けられている。ハンド機構163は、図5に示すように、駆動源としてのモータ163aと、モータ163aの駆動軸163bに取り付けられたピニオン163cと、ピニオン163cを挟んで対向する位置に設けられた一対のラック部材163dと、ラック部材163dに各々取り付けられた一対の保持部材163eとを含んでいる。一対の保持部材163eは、互いに対向する位置にそれぞれ凹部163fを有している。このハンド機構163は、モータ163aが所定の方向に回転駆動することにより、一対の保持部材163eが互いに近づく方向に移動するとともに、一対の保持部材163eの凹部163fにより検体容器150を挟み込んで保持するように構成されている。また、ハンド機構163は、モータ163aが所定の方向とは反対の方向に回転駆動した場合には、一対の保持部材163eが互いに離れる方向に移動するように構成されている。
【0039】
次に、図1および図3を参照して、本発明の一実施形態による検体処理システム100の概略的な動作について説明する。まず、検体処理システム100の搬送ライン120が正常に動作している場合には、使用者は切替ボタン24により初期設定値であるオフラインモードからオンラインモードに切り替える。このオンラインモードにおいては、図1に示した検体容器セット部110にセットされた未処理の検体容器150が、搬送ライン120により矢印P方向に1つずつ搬送される。そして、必要に応じて、分析装置141および142により所定の分析処理が行われた後、検体容器150は、分析装置140に対応する位置まで搬送される。そして、検体移載装置160により搬送装置2に移載され、搬送装置2により供給位置2aに搬送される。これにより、血液凝固測定装置1による血液検体の分析処理が行われる。そして、処理済の検体容器150は、検体移載装置160により搬送ライン120に移載され、必要に応じて、分析装置143により所定の分析処理が行われる。その後、搬送ライン120によりさらに搬送されて、処理済検体容器収容部130に収容される。
【0040】
ここで、本実施形態では、検体処理システム100の搬送ライン120が故障などにより停止した場合には、使用者は切替ボタン24によりオンラインモードからオフラインモードに切り替える。このオフラインモードにおいては、まず、使用者は、図3に示した搬送装置2の未処理容器ストック領域R1に検体容器150を収容したラック151をセットする。そして、使用者が操作表示部11のスタートキー11aを押すことによって、ラック151が搬送装置2により供給位置2aに搬送される。これにより、血液凝固測定装置1による血液検体の分析処理が行われる。この後、処理済の検体容器150を収容したラック151は、搬送装置2により処理済容器ストック領域R2に搬送されてストックされる。
【0041】
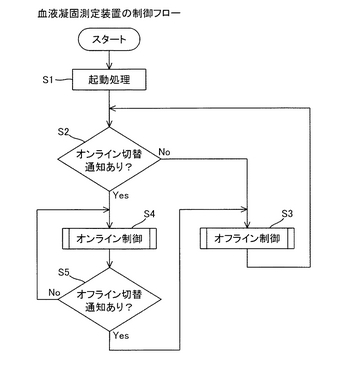
次に、図6を参照して、血液凝固測定装置1の動作制御について詳細に説明する。なお、血液凝固測定装置1の動作制御は、測定装置側制御部12により行われる。まず、血液凝固測定装置1の電源を入れることにより、ステップS1において、測定装置側制御部12は、血液凝固測定装置1をオフラインモードの状態で起動する。そして、ステップS2において、測定装置側制御部12は、オンラインモードへの切替の通知があったか否かを判断する。そして、ステップS2において、オンラインモードへの切替の通知がなかったと判断された場合には、ステップS3において、測定装置側制御部12は、血液凝固測定装置1をオフラインモードで制御する。その後、ステップS2に戻り、オンラインモードへの切替の通知があったか否かが判断される。一方、ステップS2において、オンラインモードへの切替の通知があったと判断された場合には、ステップS4において、測定装置側制御部12は、血液凝固測定装置1をオンラインモードで制御する。その後、ステップS5において、測定装置側制御部12は、オフラインモードへの切替の通知があったか否かを判断する。そして、ステップS5において、オフラインモードへの切替の通知がなかったと判断された場合には、ステップS4に戻り、測定装置側制御部12は、血液凝固測定装置1をオンラインモードで制御する。一方、ステップS5において、オフラインモードへの切替の通知があったと判断された場合には、ステップS3において、測定装置側制御部12は、血液凝固測定装置1をオフラインモードで制御する。
【0042】
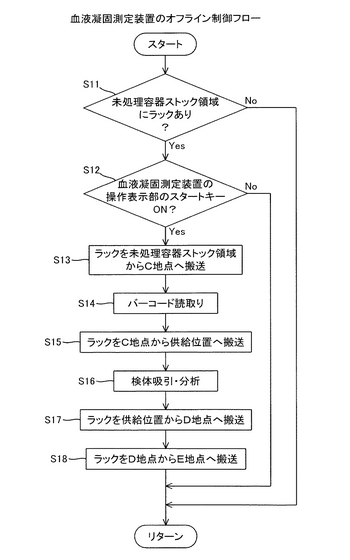
次に、図6のステップS3における血液凝固測定装置1のオフラインモードでの動作制御について、図3、図5および図7を参照して説明する。まず、図7に示したフローチャートのステップS11において、測定装置側制御部12は、搬送路21に設けられた一対のセンサ42(図3参照)の出力に基づいて、未処理容器ストック領域R1にラック151が存在するか否かを判断する。そして、ステップS11において、ラック151が存在すると判断された場合には、ステップS12において、測定装置側制御部12は、血液凝固測定装置1のタッチパネル式の操作表示部11のスタートキー11aが押されたか否かを判断する。そして、ステップS12において、血液凝固測定装置1の操作表示部11のスタートキー11aが押されたと判断された場合には、ステップS13において、測定装置側制御部12は、駆動モータM2を駆動させることにより一対の搬送部材32を移動させて、未処理容器ストック領域R1のいずれかの位置に載置されているラック151をC地点に搬送する。なお、ラック151がC地点に到達したことは、センサ44によって検知され、検知信号が測定装置側制御部12に通知される。
【0043】
ラック151がC地点に搬送されると、ステップS14において、測定装置側制御部12は、バーコードリーダ(図示せず)が一体的に取り付けられたセンサ46をT方向に往復移動させる。これにより、ラック151に収容されている検体容器150の位置を検知するとともに、バーコードリーダに検体容器150のバーコードラベル150a(図5参照)を読み取らせる。そして、ステップS15において、測定装置側制御部12は、駆動モータM3を駆動することにより一対の横送り部材33を駆動させて、所定の間隔(ラック151に収容された隣接する検体容器150間の間隔)毎にC地点のラック151を供給位置2aに向かって間欠的に横送りする。この一対の横送り部材33による横送りの動作は、一対のセンサ45の出力に基づいて監視される。そして、ステップS16において、測定装置側制御部12は、供給位置2aに位置する検体容器150を、センサ46とバーコードリーダ(図示せず)とにより再度識別するとともに、血液凝固測定装置1のピアサ(図示せず)により検体容器150内の血液検体を吸引して分析する処理を実行する。そして、ステップS17において、測定装置側制御部12は、血液凝固測定装置1による血液検体の分析と並行して、ラック151を供給位置2aからD地点に向かって横送りする処理を実行する。
【0044】
そして、ステップS18において、測定装置側制御部12は、駆動モータM4を駆動することにより押出し部材34を移動させて、処理済の検体容器150を収容したラック151をD地点からE地点まで搬送する。そして、図6のステップS2の処理に移る。なお、この押出し部材34によるラック151のD地点からE地点までの搬送を順次繰り返すことにより、E地点のラック151が処理済容器ストック領域R2側に押し出されるので、処理済の検体容器150を収容したラック151が処理済容器ストック領域R2にストックされる。ステップS11において、未処理容器ストック領域R1にラック151が存在しないと判断された場合や、ステップS12において、血液凝固測定装置1のタッチパネル式の操作表示部11のスタートキー11aが押されていないと判断された場合には、図6のステップS2の処理に移る。
【0045】
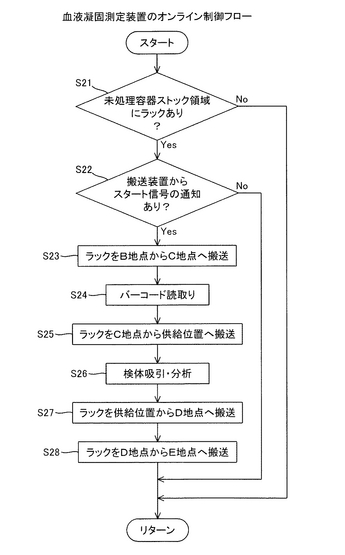
次に、図6のステップS4における血液凝固測定装置1のオンラインモードでの動作制御について、図3および図8を参照して説明する。ステップS21において、測定装置側制御部12は、搬送路21に設けられた一対のセンサ42(図3参照)の出力に基づいて、未処理容器ストック領域R1にラック151が存在するか否かを判断する。そして、ステップS21において、一対のセンサ42によって、未処理容器ストック領域R1にラック151が存在すると判断された場合には、ステップS22において、測定装置側制御部12は、搬送装置2からスタート信号の通知があったか否かを判断する。なお、このスタート信号は、後述するようにラック151がA地点からB地点に搬送されたときに搬送装置側制御部22から測定装置側制御部12に通知される。そして、ステップS22において、搬送装置2からスタート信号の通知があったと判断された場合には、ステップS23において、測定装置側制御部12は、駆動モータM2を駆動させることにより一対の搬送部材32を移動させて、ラック151を未処理容器ストック領域R1からC地点に搬送する。
【0046】
そして、ステップS24において、上記したオフラインモードでの動作制御と同様、センサ46とバーコードリーダとにより、ラック151に収容されている検体容器150の位置を検知するとともに、検体容器150のバーコードラベル150aが読み取られる。そして、ステップS25において、測定装置側制御部12は、駆動モータM3を駆動することにより一対の横送り部材33を駆動させて、所定の間隔(ラック151に収容された隣接する検体容器150間の間隔)毎にC地点のラック151を供給位置2aに向かって間欠的に横送りする。この一対の横送り部材33による横送りの動作は、一対のセンサ45の出力に基づいて監視される。そして、ステップS26において、測定装置側制御部12は、供給位置2aに位置する検体容器150を、センサ46とバーコードリーダとにより再度識別するとともに、血液凝固測定装置1のピアサ(図示せず)により検体容器150内の血液検体を吸引して分析する処理を実行する。そして、ステップS27において、測定装置側制御部12は、血液凝固測定装置1による血液検体の分析と並行して、ラック151を供給位置2aからD地点に向かって横送りする処理を実行する。
【0047】
そして、ステップS28において、測定装置側制御部12は、駆動モータM4を駆動することにより押出し部材34を移動させて、処理済の検体容器150を収容したラック151をD地点からE地点まで搬送する。そして、図6のステップS5の処理に移る。なお、ステップS21において、未処理容器ストック領域R1にラック151が存在しないと判断された場合や、ステップS22において、搬送装置2からスタート信号の通知がないと判断された場合には、図6のステップS5の処理に移る。
【0048】
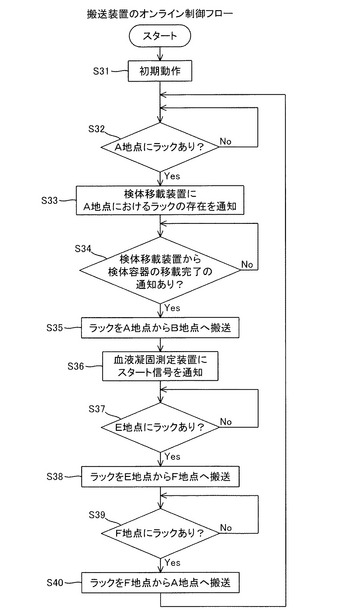
次に、搬送装置2のオンラインモードでの動作制御について、図3〜図5および図9を参照して説明する。なお、オンラインモードでの分析装置140の動作制御は、測定装置側制御部12と搬送装置側制御部22とにより行われる。使用者が切替ボタン24を操作して動作モードをオフラインモードからオンラインモードに切り替えると、まず、搬送装置2による初期動作が行われる。この初期動作として、測定装置側制御部12および搬送装置側制御部22により搬送装置2を駆動させることにより、3つの空のラック151をそれぞれ搬送路21(図3参照)のA地点、D地点およびF地点に配置する。ここで、A地点に配置されているラック151に対する動作制御としては、ステップS32において、搬送装置側制御部22は、センサ41の出力に基づいて、A地点にラック151が存在するか否かを判断する。そして、ステップS32において、A地点にラック151が存在しないと判断された場合には、再びステップS32の判断がなされる。なお、このステップS32の判断は、A地点にラック151が存在すると判断されるまで繰り返し行われる。
【0049】
そして、ステップS32において、A地点にラック151が存在すると判断された場合には、ステップS33において、搬送装置側制御部22は、A地点にラック151が存在することを検体移載装置160に通知する。これにより、検体移載装置160は、搬送ライン120により搬送されている検体容器150を、図4および図5に示したハンド機構163を用いて、搬送装置2のA地点に存在するラック151に移載する。そして、ステップS34において、搬送装置側制御部22は、検体移載装置160から検体容器150の移載が完了したことを伝える通知があったか否かを判断する。そして、ステップS34において、検体移載装置160から検体容器150の移載が完了したことを伝える通知がないと判断された場合には、再びステップS34の判断がなされる。なお、このステップS34の判断は、検体移載装置160から検体容器150の移載が完了したことを伝える通知があったと判断されるまで繰り返し行われる。一方、ステップS34において、検体移載装置160から検体容器150の移載が完了したことを伝える通知があったと判断された場合には、ステップS35に進む。そして、ステップS35において、搬送装置側制御部22は、駆動モータM1を駆動させることにより押出し部材31を移動させて、ラック151をA地点からB地点に搬送する。
【0050】
そして、ステップS36において、搬送装置側制御部22は、血液凝固測定装置1にスタート信号を通知する。このステップS36における搬送装置2からのスタート信号の通知を起点として、血液凝固測定装置1側では、図8のステップS21〜S28に示したような血液凝固測定装置1によるラック151のB地点からE地点までの搬送処理が開始される。そして、搬送装置2側では、図9のステップS37において、搬送装置側制御部22は、センサ50の出力に基づいて、E地点にラック151が存在するか否かを判断する。そして、ステップS37において、E地点にラック151が存在しないと判断された場合には、再びステップS37の判断がなされる。なお、このステップS37の判断は、E地点にラック151が存在すると判断されるまで繰り返し行われる。そして、ステップS37において、E地点にラック151が存在すると判断された場合には、ステップS38において、搬送装置側制御部22は、駆動モータM5を駆動させることにより一対の搬送部材35を移動させて、ラック151をE地点からF地点に搬送する。そして、ステップS39において、搬送装置側制御部22は、センサ51の出力に基づいて、F地点にラック151が存在するか否かを判断する。
【0051】
そして、ステップS39において、F地点にラック151が存在しないと判断された場合には、再びステップS39の判断がなされる。なお、このステップS39の判断は、F地点にラック151が存在すると判断されるまで繰り返し行われる。そして、ステップS39において、F地点にラック151が存在すると判断された場合には、ステップS40において、搬送装置側制御部22は、駆動モータM6を駆動させることにより送出し部材36を移動させて、ラック151をF地点からA地点に搬送する。その後、ステップS32に戻り、再び、A地点にラック151が存在するか否かが判断される。そして、ステップS32において、A地点にラック151が存在すると判断された場合には、ステップS33において、A地点にラック151が存在することを検体移載装置160に通知する。これにより、検体移載装置160は、搬送装置2のA地点に存在するラック151から処理済の検体容器150をハンド機構163を用いて、搬送ライン120へと移載する。その後、搬送ライン120により搬送されている未処理の検体容器150をハンド機構163を用いて、搬送装置2のA地点に存在するラック151に移載する。そして、ステップS34において、検体移載装置160から検体容器150の移載が完了したことを伝える通知があったか否かが判断され、ラック151の搬送が行われる。
【0052】
なお、上記したステップS32〜S40では、初期動作によりA地点に存在するラック151に対する動作制御について説明したが、初期動作によりD地点およびF地点に存在する2つのラック151に対しても上記と同様の動作制御が並行して行われる。
【0053】
本実施形態では、上記のように、搬送装置2を、搬送ライン120によって搬送される検体容器150を受け取って搬送するオンラインモードと、搬送ライン120から独立して検体容器150を搬送するオフラインモードとで動作可能に構成することによって、オフラインモードにより搬送装置2を搬送ライン120から独立して動作させることができるので、搬送ライン120が故障などにより停止した場合でも、オフラインモードに設定することにより、血液凝固測定装置1に対する血液検体の供給位置2aに検体容器150を搬送することができる。その結果、搬送ライン120が故障などにより停止した場合でも、血液検体の処理を継続して行うことができる。
【0054】
また、本実施形態では、上記のように、オンラインモードにおける搬送装置2の動作を、血液凝固測定装置1の測定装置側制御部12と搬送装置2の搬送装置側制御部22とにより制御するように構成することによって、オンラインモードにおける搬送装置2の動作の少なくとも一部が搬送装置側制御部22により制御されるので、血液凝固測定装置1および搬送装置2の制御を測定装置側制御部12のみで行う場合に比べて、血液凝固測定装置1の測定装置側制御部12の負担を軽減することができる。
【0055】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0056】
たとえば、上記実施形態では、本発明を、検体移載装置を用いて、検体容器を搬送ラインと搬送装置との間で移動するように構成された分析装置に適用する例について説明したが、本発明はこれに限らず、検体移載装置を用いずに、搬送ラインとの間で直接検体容器の受取りおよび受渡しを行うように構成された分析装置に本発明を適用してもよい。
【0057】
また、上記実施形態では、本発明を、検体処理ユニットの一例としての血液凝固測定装置に検体を供給するための搬送装置に適用する例について説明したが、本発明はこれに限らず、検体処理ユニットとしての血球計数装置、免疫凝集測定装置、塗抹標本作製装置および尿分析装置などに検体を供給するための搬送装置に本発明を広く適用可能である。
【0058】
また、上記実施形態では、オンラインモードにおける搬送装置の動作を、血液凝固測定装置の測定装置側制御部と搬送装置の搬送装置側制御部とで制御するとともに、オフラインモードにおける搬送装置の動作を、血液凝固測定装置の測定装置側制御部で制御するように構成したが、本発明はこれに限らず、搬送装置のオンラインモードおよびオフラインモードにおけるすべての動作を、血液凝固測定装置の測定装置側制御部で制御するようにしてもよいし、搬送装置のオンラインモードおよびオフラインモードにおけるすべての動作を、搬送装置の搬送装置側制御部で制御するようにしてもよい。
【0059】
また、上記実施形態では、オンラインモードにおいて、搬送装置により3つのラックを搬送する例について示したが、本発明はこれに限らず、オンラインモードにおいて、4つ以上のラックを同時に搬送可能な搬送装置に本発明を適用してもよい。
【0060】
また、上記実施形態では、本発明を、4つの分析装置を備えた検体処理システムに適用する例について説明したが、本発明はこれに限らず、3つ以下または5つ以上の分析装置を備えた検体処理システムに本発明を適用しても同様の効果を得ることが可能である。
【0061】
また、上記実施形態では、オンラインモードにおける初期位置を搬送路上のA地点に設定するとともに、オフラインモードにおける初期位置を搬送路上の未処理容器ストック領域R1に設定する例について説明したが、本発明はこれに限らず、オンラインモードにおける初期位置とオフラインモードにおける初期位置とを搬送路上の同じ位置(たとえばA地点)に設定してもよい。
【0062】
また、上記実施形態では、オンラインモードとオフラインモードとの切り替えを行う切替ボタンを搬送装置に設ける例について説明したが、本発明はこれに限らず、オンラインモードとオフラインモードとの切り替えを行う切替ボタンを血液凝固測定装置に設けてもよい。
【図面の簡単な説明】
【0063】
【図1】本発明の一実施形態による検体処理システムの全体構成を示した概略図である。
【図2】図1に示した一実施形態による検体処理システムにおける分析装置を示した斜視図である。
【図3】図2に示した一実施形態による検体処理システムにおける分析装置の構成を示したブロック図である。
【図4】図1に示した一実施形態による検体処理システムにおける検体移載装置の構成を示したブロック図である。
【図5】図4に示した一実施形態による検体処理システムにおける検体移載装置のハンド機構を示した斜視図である。
【図6】図2に示した一実施形態による検体処理システムにおける分析装置の血液凝固測定装置の動作制御を示したフローチャートである。
【図7】図2に示した一実施形態による検体処理システムにおける分析装置の血液凝固測定装置のオフラインモードにおける動作制御を示したフローチャートである。
【図8】図2に示した一実施形態による検体処理システムにおける分析装置の血液凝固測定装置のオンラインモードにおける動作制御を示したフローチャートである。
【図9】図2に示した一実施形態による検体処理システムにおける分析装置の搬送装置のオンラインモードにおける動作制御を示したフローチャートである。
【符号の説明】
【0064】
1 血液凝固測定装置(検体処理ユニット)
2 搬送装置(搬送ユニット)
12 測定装置側制御部(第1制御部)
21 搬送路
22 搬送装置側制御部(第2制御部)
24 切替ボタン(切替手段)
100 検体処理システム
120 搬送ライン
140 分析装置(検体処理装置)
150 検体容器
151 ラック
160 検体移載装置
【技術分野】
【0001】
本発明は、検体処理装置および検体処理システムに関し、特に、検体を収容した検体容器を備えた検体処理装置および検体処理システムに関する。
【背景技術】
【0002】
従来、検体の検査の効率化を図るために、複数の分析装置(検体処理装置)と、それらの分析装置に検体を搬送するための搬送ラインとを接続した検体処理システムが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、検体を収容した検体容器を複数の分析装置に沿って搬送ラインにより搬送しながら、その検体容器内の検体を分析装置に供給することにより、検体検査を自動的に行う検体検査システムが開示されている。この特許文献1には、爪部材を用いて搬送ライン上の検体容器を分岐コンベア上に引き込んだ後、移載装置を用いて分岐コンベアと分析装置の専用ラックとの間で検体容器を移動させることによって、分析装置に検体を供給する技術や、分岐コンベア上の検体容器を直接取り出して検体を分析する分析装置が開示されている。また、特許文献1には、搬送ライン上の検体容器を把持するとともに、針により検体容器内の検体を分注して、分析装置に検体を供給するサンプル装置が開示されている。
【0004】
【特許文献1】特開平7−239333号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に開示された従来の検体検査システムでは、搬送ラインが故障などにより停止した場合には、搬送ラインにより検体容器が搬送されないので、分岐コンベアまたはサンプル装置によって分析装置に検体を供給するのが困難になるという不都合がある。このため、搬送ラインが復旧するまで検体の検査を中断する必要があるという問題点がある。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、検体を収容した検体容器を搬送する外部の搬送ラインが停止した場合でも、検体の処理を継続して行うことが可能な検体処理装置および検体処理システムを提供することを目的とする。
【課題を解決するための手段および発明の効果】
【0007】
上記目的を達成するために、この発明の第1の局面による検体処理装置は、検体を処理する検体処理ユニットと、検体処理ユニットに検体を供給するための供給位置に、検体を収容した検体容器を搬送する搬送ユニットとを備え、搬送ユニットは、外部に設けられた搬送ラインによって搬送される検体容器を受け取って搬送する第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能である。
【0008】
この第1の局面による検体処理装置では、上記のように、搬送ユニットを、外部に設けられた搬送ラインによって搬送される検体容器を受け取って搬送する第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能に構成することによって、第2モードにより搬送ユニットを搬送ラインから独立して動作させることができるので、搬送ラインが故障などにより停止した場合でも、第2モードに設定することにより、検体処理ユニットへの検体の供給位置に検体容器を搬送することができる。その結果、搬送ラインが故障などにより停止した場合でも、検体の処理を継続して行うことができる。
【0009】
上記第1の局面による検体処理装置において、好ましくは、搬送ユニットは、第1モードにおいて、搬送ユニットの第1初期位置から供給位置を通って第1初期位置に戻る経路で検体容器を搬送し、検体容器の搬送ラインからの受取りと、検体容器の搬送ラインへの受渡しとが第1初期位置で行われる。このように構成すれば、第1モードにおいて、搬送ラインからの検体容器の受取りと、搬送ラインへの検体容器の受渡しとを同一の第1初期位置で行うことができるので、搬送ユニットと搬送ラインとの間で検体容器の移載を行う機構を簡略化することができる。
【0010】
この場合、好ましくは、搬送ユニットは、第1モードにおいて、複数の検体容器を収容可能なラックを第1初期位置に停止させ、ラックに複数の検体容器が収容された後、ラックを供給位置に搬送する。このように構成すれば、複数の検体容器をラックに収容した状態で検体処理ユニットへの供給位置に搬送することができるので、複数の検体容器を一度に搬送することができる。
【0011】
上記第1の局面による検体処理装置において、好ましくは、搬送ユニットは、第2モードにおいて、搬送ユニットの第2初期位置から供給位置を通って第2初期位置とは異なる所定位置まで検体容器を搬送する。このように構成すれば、搬送ラインから独立して検体容器を搬送する第2モードにおいて、処理済の検体容器を第2初期位置とは異なる所定位置にストックしながら、第2初期位置に未処理の検体容器をセットすることができる。
【0012】
この場合、好ましくは、第2初期位置とは異なる所定位置は、検体処理ユニットへの検体の供給が終了した検体容器をストックするための処理済容器ストック位置である。このように構成すれば、第2モードにおいて、供給位置を通過した検体容器が処理済容器ストック位置に搬送されてストックされるので、1つの検体容器の処理が終了する毎に、使用者が搬送ユニットから処理済の検体容器を除去する必要がない。これにより、第2モードの検体処理における使用者の負担を軽減することができる。
【0013】
上記搬送ユニットに設定された第2初期位置を含む構成において、好ましくは、第2初期位置は、検体処理ユニットへの検体の供給が行われていない検体容器をストックするための未処理容器ストック位置である。このように構成すれば、検体処理ユニットへの検体の供給が行われていない検体容器を未処理容器ストック位置にストックすることができるので、所定の数の検体容器をまとめて搬送ユニットにセットすることができる。これにより、1つの検体容器の処理が終了する毎に、使用者が搬送ユニットに検体容器を補充する必要がないので、第2モードの検体処理における使用者の負担を軽減することができる。
【0014】
上記第1の局面による検体処理装置において、好ましくは、搬送ユニットは、環状の搬送路を含み、第1モードにおいて、複数の検体容器を環状の搬送路上を搬送する。このように構成すれば、検体容器を搬送する搬送路を環状に形成することによって、第1モードにおいて、容易に、検体容器を第1初期位置から供給位置を通って第1初期位置に戻る経路で循環して連続的に搬送することができる。
【0015】
この場合、好ましくは、環状の搬送路は、平面的に見て四角形状の搬送路である。このように構成すれば、環状の搬送路を直線経路のみで構成することができるので、搬送ユニットの構成を簡略化することができる。
【0016】
上記第1の局面による検体処理装置において、好ましくは、検体処理ユニットおよび搬送ユニットの少なくとも一方は、第1モードと第2モードとを切り替える切替手段を含む。このように構成すれば、切替手段により、容易に、第1モードと第2モードとの切替を行うことができる。
【0017】
上記第1の局面による検体処理装置において、好ましくは、検体処理ユニットは、少なくとも検体処理ユニットを制御するための第1制御部を含み、搬送ユニットは、少なくとも搬送ユニットを制御するための第2制御部を含む。このように構成すれば、搬送ユニットの動作の少なくとも一部が第2制御部によって制御されるので、検体処理ユニットおよび搬送ユニットの制御を第1制御部のみで行う場合に比べて、第1制御部の負担を軽減することができる。
【0018】
この場合、好ましくは、第1制御部は、検体処理ユニットおよび搬送ユニットを制御し、第1モードにおける搬送ユニットの動作は、第1制御部および第2制御部によって制御される。このように構成すれば、第1モードにおける搬送ユニットの動作を第1制御部と第2制御部とによって制御することができるので、第1制御部の負担を軽減することができる。
【0019】
上記検体処理ユニットおよび搬送ユニットがそれぞれ第1制御部および第2制御部を含む構成において、好ましくは、第1制御部は、検体処理ユニットおよび搬送ユニットを制御し、第1モードにおける搬送ユニットの動作は、第1制御部および第2制御部によって制御され、第2モードにおける搬送ユニットの動作は、第1制御部によって制御される。このように構成すれば、第1モードにおける第1制御部の負担を軽減することができるとともに、第2モードにおける搬送ユニットの動作を検体処理ユニット側で制御することができる。
【0020】
この発明の第2の局面による検体処理システムは、検体を処理する検体処理ユニットと、検体処理ユニットに検体を供給するための供給位置に検体を収容した検体容器を搬送する搬送ユニットとを含む検体処理装置と、外部に設けられた搬送ラインによって搬送される検体容器を搬送ユニットに移動させるとともに、搬送ユニットによって搬送される検体容器を搬送ラインに移動させる検体移載装置とを備え、搬送ユニットは、搬送ラインによって搬送される検体容器を、検体移載装置を介して受け取って搬送した後、検体移載装置を介して搬送ラインに受け渡す第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能である。
【0021】
この第2の局面による検体処理システムでは、上記のように、搬送ユニットを、外部に設けられた搬送ラインによって搬送される検体容器を受け取って搬送した後、搬送ラインに受け渡す第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能に構成することによって、第2モードにより搬送ユニットを搬送ラインから独立して動作させることができるので、搬送ラインが故障などにより停止した場合でも、第2モードに設定することにより、検体処理ユニットへの検体の供給位置に検体容器を搬送することができる。その結果、搬送ラインが故障などにより停止した場合でも、検体の処理を継続して行うことができる。また、検体移載装置を用いて、外部に設けられた搬送ラインによって搬送される検体容器を搬送ユニットに移動させるとともに、搬送ユニットによって搬送される検体容器を搬送ラインに移動させることによって、搬送ラインに対する検体処理装置の配置を変更したとしても、検体移載装置により容易に対応することができるので、検体処理システムの配置の自由度を向上させることができる。
【0022】
上記第2の局面による検体処理システムにおいて、好ましくは、搬送ユニットは、第1モードにおいて、検体容器を収容するためのラックが搬送ユニットの初期位置に存在する場合に、ラックが搬送ユニットの初期位置に存在することを検体移載装置に通知する。このように構成すれば、第1モードにおいて、ラックが搬送ユニットの初期位置に存在することの通知を受けた検体移載装置は、容易に、搬送ラインによって搬送される検体容器を搬送ユニットの初期位置に存在するラックに収容することができる。また、検体移載装置に、ラックが搬送ユニットの初期位置に存在することを通知することによって、搬送ユニットの初期位置にラックがない場合に、検体移載装置が誤って検体容器を搬送ユニットに移動するのを防止することができる。
【0023】
この場合、好ましくは、搬送ユニットは、検体移載装置から検体容器のラックへの移載の完了の通知を受けたことに応答して、ラックを初期位置から供給位置に搬送する。このように構成すれば、検体移載装置による検体容器のラックへの移載が完了する前に、搬送ユニットが誤ってラックの搬送を開始するのを防止することができる。
【0024】
この発明の第3の局面による検体処理システムは、検体を収容した検体容器を搬送する搬送ラインと、搬送ラインによって搬送される検体容器を受け取って処理する検体処理装置とを備え、検体処理装置は、検体を処理する検体処理ユニットと、検体処理ユニットに検体を供給するための供給位置に、検体容器を搬送する搬送ユニットとを含み、搬送ユニットは、搬送ラインによって搬送される検体容器を受け取って搬送する第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能である。
【0025】
この第3の局面による検体処理システムでは、上記のように、搬送ユニットを、搬送ラインによって搬送される検体容器を受け取って搬送する第1モードと、搬送ラインから独立して検体容器を搬送する第2モードとで動作可能に構成することによって、第2モードにより搬送ユニットを搬送ラインから独立して動作させることができるので、搬送ラインが故障などにより停止した場合でも、第2モードに設定することにより、検体処理ユニットへの検体の供給位置に検体容器を搬送することができる。その結果、搬送ラインが故障などにより停止した場合でも、検体の処理を継続して行うことができる。
【発明を実施するための最良の形態】
【0026】
以下、本発明の実施形態を図面に基づいて説明する。
【0027】
図1は、本発明の一実施形態による検体処理システムの全体構成を示した概略図である。図2および図3は、図1に示した一実施形態による検体処理システムにおける分析装置の構成を示した図である。図4は、図1に示した一実施形態による検体処理システムにおける検体移載装置の構成を示したブロック図であり、図5は、図4に示した検体移載装置のハンド機構を示した斜視図である。図6〜図9は、図2に示した一実施形態による検体処理システムにおける分析装置の制御を示したフローチャートである。まず、図1を参照して、本発明の一実施形態による検体処理システム100の全体構成について説明する。
【0028】
本発明の一実施形態による検体処理システム100は、図1に示すように、検体容器セット部110と、搬送ライン120と、処理済検体容器収容部130と、4つの分析装置140、141、142および143とにより構成されている。検体容器セット部110は、搬送ライン120の搬送方向(矢印P方向)の上流側の端部に配置され、未処理の検体容器150を搬送ライン120に供給するために設けられている。搬送ライン120は、検体容器セット部110から供給された検体容器150を搬送するために設けられている。処理済検体容器収容部130は、搬送ライン120の搬送方向(矢印P方向)の下流側の端部に配置され、4つの分析装置140〜143の少なくともいずれかによる分析処理が終了した検体容器150を収容するために設けられている。分析装置140〜143は、搬送ライン120によって搬送される検体容器150を搬送ライン120から受け取って処理するとともに、処理済の検体容器150を搬送ライン120に受け渡すことが可能なように構成されている。また、分析装置140〜143は、検体容器150に収容された血液検体に対して、互いに異なる分析処理を行うように構成されている。すなわち、本実施形態による検体処理システム100では、検体容器セット部110にセットされた未処理の検体容器150は、搬送ライン120により搬送されながら、4つの分析装置140〜143の少なくともいずれかにより所定の分析処理を施された後、処理済検体容器収容部130に収容されるように構成されている。
【0029】
次に、図1〜図3および図5を参照して、4つの分析装置140〜143のうち、一例として分析装置140の構成について説明する。この分析装置140は、図1に示すように、搬送ライン120に検体移載装置160を介して接続されている。この分析装置140は、図2に示すように、血液凝固測定装置1と、血液凝固測定装置1の前面側に配置された搬送装置2とにより構成されている。
【0030】
血液凝固測定装置1は、検体容器150に収容されている血液検体を搬送装置2の供給位置2aにおいてピアサ(図示せず)を用いて吸引するとともに、その血液検体について複数の項目について分析を行うことが可能な自動分析型の装置である。血液凝固測定装置1には、図1および図3に示すように、タッチパネル式の操作表示部11と、測定装置側制御部12とが設けられている。操作表示部11は、タッチパネル式の表示装置であり、血液凝固測定装置1の測定開始ボタンとしてのスタートキー11aが所定のタイミングで表示されるように構成されている。また、測定装置側制御部12は、血液凝固測定装置1および搬送装置2を制御可能なように構成されている。この測定装置側制御部12は、CPU、ROM、RAMなどからなる。
【0031】
搬送装置2は、血液検体を血液凝固測定装置1に供給するために設けられている。この搬送装置2は、図3に示すように、ラック151に収容された複数(本実施形態では、10本)の検体容器150を搬送装置2の供給位置2aに搬送することにより、検体容器150内の血液検体を血液凝固測定装置1に供給する。
【0032】
ここで、本実施形態では、搬送装置2は、搬送ライン120によって搬送される検体容器150を受け取って搬送するオンラインモードと、搬送ライン120から独立して検体容器150を搬送するオフラインモードとで動作可能に構成されている。搬送装置2は、オンラインモードでは、搬送ライン120から未処理の検体容器150を受け取って供給位置2aに搬送した後、処理済の検体容器150を再び搬送ライン120に受け渡すように構成されている。また、搬送装置2は、オフラインモードでは、使用者により搬送装置2にセットされた未処理の検体容器150を供給位置2aに搬送するように構成されている。この搬送装置2は、図1および図3に示すように、複数(本実施形態では10個)の検体容器150を収容したラック151の搬送を行う搬送路21と、搬送装置側制御部22と、緊急停止ボタン23と、切替ボタン24と、表示部25とを含んでいる。搬送装置側制御部22は、オンラインモードにおける搬送装置2の動作制御を行うために設けられている。この搬送装置側制御部22は、CPU、ROM、RAMなどからなる。搬送装置2の動作は、オンラインモードにおいて、測定装置側制御部12と搬送装置側制御部22とにより制御され、オフラインモードにおいて、測定装置側制御部12により制御される。また、切替ボタン24は、オンラインモードとオフラインモードとの切り替えを行うために設けられている。この切替ボタン24が入力されると、測定装置側制御部12にモード切替が通知される。また、表示部25には、現在設定されている搬送装置2の動作モード(オンラインモードまたはオフラインモード)の表示や、搬送装置2における動作エラーの表示などが行われる。
【0033】
搬送路21は、図1〜図3に示すように、ラック151が中央部21aの周りを循環可能となるように環状に形成されており、平面的に見て四角形状を有している。複数の検体容器150を収容したラック151は、この搬送路21上を反時計回りの方向に搬送される。搬送路21には、図3に示すように、検体移載装置160を介して搬送ライン120との間で検体容器150の移動が行われるオンラインモードにおける初期位置をA地点として、反時計回りに順次B地点、C地点、D地点、E地点およびF地点が設けられている。また、搬送路21のC地点とD地点との間に、供給位置2aが位置するように構成されている。また、搬送路21には、未処理容器ストック領域R1と、処理済容器ストック領域R2とが設けられている。未処理容器ストック領域R1は、搬送路21上のB地点からC地点までの領域であり、処理済容器ストック領域R2は、搬送路21上のE地点からF地点までの領域である。未処理容器ストック領域R1は、オフラインモードにおいて、血液凝固測定装置1への検体の供給が行われていない未処理の検体容器150を収容したラック151をストックするために設けられている。すなわち、未処理容器ストック領域R1は、オフラインモードにおける初期位置である。また、処理済容器ストック領域R2は、オフラインモードにおいて、血液凝固測定装置1への検体の供給が終了した処理済の検体容器150を収容したラック151をストックするために設けられている。
【0034】
また、図3に示した搬送路21には、押出し部材31と、一対の搬送部材32と、一対の横送り部材33と、押出し部材34と、一対の搬送部材35と、送出し部材36と、位置規制部材37と、駆動モータM1〜M6とが設けられている。押出し部材31は、ラック151をA地点からB地点まで搬送するために設けられている。この押出し部材31は、駆動モータM1によって駆動されるように構成されている。一対の搬送部材32は、ラック151をB地点からC地点まで搬送するために設けられている。この一対の搬送部材32は、駆動モータM2によって駆動されるように構成されている。一対の横送り部材33は、C地点のラック151をD地点に所定の間隔(ラック151に収容された隣接する検体容器150間の間隔)毎に横送りするために設けられている。この一対の横送り部材33は、駆動モータM3によって駆動されるように構成されている。押出し部材34は、ラック151をD地点からE地点まで搬送するために設けられている。この押出し部材34は、駆動モータM4によって駆動されるように構成されている。一対の搬送部材35は、ラック151をE地点からF地点まで搬送するために設けられている。この一対の搬送部材35は、駆動モータM5によって駆動されるように構成されている。送出し部材36は、ラック151をF地点からA地点まで搬送するために設けられている。この送出し部材36は、駆動モータM6によって駆動されるように構成されている。位置規制部材37は、反時計回り(図3中の矢印Q方向)に回動可能に構成されており、F地点からA地点に横送りされたラック151のA地点における位置を規制するために設けられている。この位置規制部材37は、位置規制面37aおよび37bを有している。位置規制面37aは、A地点に存在するラック151が血液凝固測定装置1の方向に移動するのを防止する機能を有する。また、位置規制面37bは、A地点に存在するラック151が左方向に移動するのを防止する機能を有する。この位置規制部材37により、A地点におけるラック151の位置を規制することができるので、検体移載装置160により搬送ライン120から移動された検体容器150を容易にラック151に収容することが可能である。
【0035】
また、図3に示した搬送路21には、センサ41と、一対の光透過型のセンサ42と、センサ43および44と、一対のセンサ45と、センサ46および47と、一対の光透過型のセンサ48と、センサ49〜52とが設けられている。センサ41は、A地点の右側の搬送路21の外周部に設置されており、A地点にラック151が存在するか否かを検知するために設けられている。一対のセンサ42は、C地点の右側の搬送路21の外周部と、中央部21aの位置規制部材37の近傍とにそれぞれ設置されている。この一対のセンサ42は、未処理容器ストック領域R1にラック151が存在するか否かを検知するために設けられている。センサ43は、B地点の左側の中央部21aに設置されており、B地点にラック151が存在するか否かを検知するために設けられている。センサ44は、C地点の血液凝固測定装置1の方向の搬送路21の外周部に設置されており、C地点にラック151が存在するか否かを検知するために設けられている。一対のセンサ45は、一対の横送り部材33の間の搬送路21の外周部に、搬送方向に沿って所定の間隔を隔てて設置されている。この一対のセンサ45は、一対の横送り部材33によりC地点のラック151がD地点に横送りされているか否かを検知するために設けられている。
【0036】
また、センサ46は、供給位置2aに対応する搬送路21の外周部に設置されている。このセンサ46は、左右方向(図3のT方向)に移動可能に構成されており、ラック151に収容されている検体容器150の位置を検知するために設けられている。また、センサ46には、バーコードリーダ(図示せず)が一体的に取り付けられており、センサ46により検知された検体容器150のバーコードラベル150a(図5参照)を読み取ることが可能なように構成されている。また、図3に示したセンサ47は、供給位置2aに対応する中央部21aに設置されており、ラック151に収容された検体容器150にゴム栓150b(図5参照)が装着されているか否かを検知するために設けられている。一対のセンサ48は、D地点の左側の搬送路21の外周部と、F地点の右端に対応する搬送路21の外周部とにそれぞれ設置されている。この一対のセンサ48は、処理済容器ストック領域R2にラック151が存在するか否かを検知するために設けられている。センサ49および50は、E地点の左側の搬送路21の外周部に隣接して設置されており、E地点にラック151が存在するか否かを検知するために設けられている。センサ51および52は、F地点の左側の搬送路21の外周部に隣接して設置されており、F地点にラック151が存在するか否かを検知するために設けられている。
【0037】
ここで、本実施形態では、駆動モータM1、M5およびM6は、搬送装置2の搬送装置側制御部22により制御され、駆動モータM2、M3およびM4は、血液凝固測定装置1の測定装置側制御部12により制御される。すなわち、搬送路21に設けられている押出し部材31、一対の搬送部材35および送出し部材36の動作は、搬送装置側制御部22により制御される。また、一対の搬送部材32、一対の横送り部材33および押出し部材34の動作は、測定装置側制御部12により制御される。また、本実施形態では、センサ41、43、48、50および51は、搬送装置側制御部22に信号を出力し、センサ42、44〜47、49および52は、測定装置側制御部12に信号を出力する。
【0038】
また、図3に示した検体移載装置160は、搬送ライン120の未処理の検体容器150を把持し、搬送装置2に移載するとともに、搬送装置2の処理済の検体容器150を把持し、搬送ライン120に移載する機能を有している。この検体移載装置160は、図4に示すように、制御部161と、往復機構162と、ハンド機構163とを備えている。制御部161は、CPU、ROM、RAMなどを備え、往復機構162およびハンド機構163の制御を行うための機能を有している。また、制御部161は、搬送装置2のA地点に存在するラック151への検体容器150の移載を完了すると、その旨を搬送装置側制御部22に通知する機能を有する。往復機構162は、ハンド機構163を搬送ライン120と分析装置140との間で移動させるために設けられている。ハンド機構163は、図5に示すように、駆動源としてのモータ163aと、モータ163aの駆動軸163bに取り付けられたピニオン163cと、ピニオン163cを挟んで対向する位置に設けられた一対のラック部材163dと、ラック部材163dに各々取り付けられた一対の保持部材163eとを含んでいる。一対の保持部材163eは、互いに対向する位置にそれぞれ凹部163fを有している。このハンド機構163は、モータ163aが所定の方向に回転駆動することにより、一対の保持部材163eが互いに近づく方向に移動するとともに、一対の保持部材163eの凹部163fにより検体容器150を挟み込んで保持するように構成されている。また、ハンド機構163は、モータ163aが所定の方向とは反対の方向に回転駆動した場合には、一対の保持部材163eが互いに離れる方向に移動するように構成されている。
【0039】
次に、図1および図3を参照して、本発明の一実施形態による検体処理システム100の概略的な動作について説明する。まず、検体処理システム100の搬送ライン120が正常に動作している場合には、使用者は切替ボタン24により初期設定値であるオフラインモードからオンラインモードに切り替える。このオンラインモードにおいては、図1に示した検体容器セット部110にセットされた未処理の検体容器150が、搬送ライン120により矢印P方向に1つずつ搬送される。そして、必要に応じて、分析装置141および142により所定の分析処理が行われた後、検体容器150は、分析装置140に対応する位置まで搬送される。そして、検体移載装置160により搬送装置2に移載され、搬送装置2により供給位置2aに搬送される。これにより、血液凝固測定装置1による血液検体の分析処理が行われる。そして、処理済の検体容器150は、検体移載装置160により搬送ライン120に移載され、必要に応じて、分析装置143により所定の分析処理が行われる。その後、搬送ライン120によりさらに搬送されて、処理済検体容器収容部130に収容される。
【0040】
ここで、本実施形態では、検体処理システム100の搬送ライン120が故障などにより停止した場合には、使用者は切替ボタン24によりオンラインモードからオフラインモードに切り替える。このオフラインモードにおいては、まず、使用者は、図3に示した搬送装置2の未処理容器ストック領域R1に検体容器150を収容したラック151をセットする。そして、使用者が操作表示部11のスタートキー11aを押すことによって、ラック151が搬送装置2により供給位置2aに搬送される。これにより、血液凝固測定装置1による血液検体の分析処理が行われる。この後、処理済の検体容器150を収容したラック151は、搬送装置2により処理済容器ストック領域R2に搬送されてストックされる。
【0041】
次に、図6を参照して、血液凝固測定装置1の動作制御について詳細に説明する。なお、血液凝固測定装置1の動作制御は、測定装置側制御部12により行われる。まず、血液凝固測定装置1の電源を入れることにより、ステップS1において、測定装置側制御部12は、血液凝固測定装置1をオフラインモードの状態で起動する。そして、ステップS2において、測定装置側制御部12は、オンラインモードへの切替の通知があったか否かを判断する。そして、ステップS2において、オンラインモードへの切替の通知がなかったと判断された場合には、ステップS3において、測定装置側制御部12は、血液凝固測定装置1をオフラインモードで制御する。その後、ステップS2に戻り、オンラインモードへの切替の通知があったか否かが判断される。一方、ステップS2において、オンラインモードへの切替の通知があったと判断された場合には、ステップS4において、測定装置側制御部12は、血液凝固測定装置1をオンラインモードで制御する。その後、ステップS5において、測定装置側制御部12は、オフラインモードへの切替の通知があったか否かを判断する。そして、ステップS5において、オフラインモードへの切替の通知がなかったと判断された場合には、ステップS4に戻り、測定装置側制御部12は、血液凝固測定装置1をオンラインモードで制御する。一方、ステップS5において、オフラインモードへの切替の通知があったと判断された場合には、ステップS3において、測定装置側制御部12は、血液凝固測定装置1をオフラインモードで制御する。
【0042】
次に、図6のステップS3における血液凝固測定装置1のオフラインモードでの動作制御について、図3、図5および図7を参照して説明する。まず、図7に示したフローチャートのステップS11において、測定装置側制御部12は、搬送路21に設けられた一対のセンサ42(図3参照)の出力に基づいて、未処理容器ストック領域R1にラック151が存在するか否かを判断する。そして、ステップS11において、ラック151が存在すると判断された場合には、ステップS12において、測定装置側制御部12は、血液凝固測定装置1のタッチパネル式の操作表示部11のスタートキー11aが押されたか否かを判断する。そして、ステップS12において、血液凝固測定装置1の操作表示部11のスタートキー11aが押されたと判断された場合には、ステップS13において、測定装置側制御部12は、駆動モータM2を駆動させることにより一対の搬送部材32を移動させて、未処理容器ストック領域R1のいずれかの位置に載置されているラック151をC地点に搬送する。なお、ラック151がC地点に到達したことは、センサ44によって検知され、検知信号が測定装置側制御部12に通知される。
【0043】
ラック151がC地点に搬送されると、ステップS14において、測定装置側制御部12は、バーコードリーダ(図示せず)が一体的に取り付けられたセンサ46をT方向に往復移動させる。これにより、ラック151に収容されている検体容器150の位置を検知するとともに、バーコードリーダに検体容器150のバーコードラベル150a(図5参照)を読み取らせる。そして、ステップS15において、測定装置側制御部12は、駆動モータM3を駆動することにより一対の横送り部材33を駆動させて、所定の間隔(ラック151に収容された隣接する検体容器150間の間隔)毎にC地点のラック151を供給位置2aに向かって間欠的に横送りする。この一対の横送り部材33による横送りの動作は、一対のセンサ45の出力に基づいて監視される。そして、ステップS16において、測定装置側制御部12は、供給位置2aに位置する検体容器150を、センサ46とバーコードリーダ(図示せず)とにより再度識別するとともに、血液凝固測定装置1のピアサ(図示せず)により検体容器150内の血液検体を吸引して分析する処理を実行する。そして、ステップS17において、測定装置側制御部12は、血液凝固測定装置1による血液検体の分析と並行して、ラック151を供給位置2aからD地点に向かって横送りする処理を実行する。
【0044】
そして、ステップS18において、測定装置側制御部12は、駆動モータM4を駆動することにより押出し部材34を移動させて、処理済の検体容器150を収容したラック151をD地点からE地点まで搬送する。そして、図6のステップS2の処理に移る。なお、この押出し部材34によるラック151のD地点からE地点までの搬送を順次繰り返すことにより、E地点のラック151が処理済容器ストック領域R2側に押し出されるので、処理済の検体容器150を収容したラック151が処理済容器ストック領域R2にストックされる。ステップS11において、未処理容器ストック領域R1にラック151が存在しないと判断された場合や、ステップS12において、血液凝固測定装置1のタッチパネル式の操作表示部11のスタートキー11aが押されていないと判断された場合には、図6のステップS2の処理に移る。
【0045】
次に、図6のステップS4における血液凝固測定装置1のオンラインモードでの動作制御について、図3および図8を参照して説明する。ステップS21において、測定装置側制御部12は、搬送路21に設けられた一対のセンサ42(図3参照)の出力に基づいて、未処理容器ストック領域R1にラック151が存在するか否かを判断する。そして、ステップS21において、一対のセンサ42によって、未処理容器ストック領域R1にラック151が存在すると判断された場合には、ステップS22において、測定装置側制御部12は、搬送装置2からスタート信号の通知があったか否かを判断する。なお、このスタート信号は、後述するようにラック151がA地点からB地点に搬送されたときに搬送装置側制御部22から測定装置側制御部12に通知される。そして、ステップS22において、搬送装置2からスタート信号の通知があったと判断された場合には、ステップS23において、測定装置側制御部12は、駆動モータM2を駆動させることにより一対の搬送部材32を移動させて、ラック151を未処理容器ストック領域R1からC地点に搬送する。
【0046】
そして、ステップS24において、上記したオフラインモードでの動作制御と同様、センサ46とバーコードリーダとにより、ラック151に収容されている検体容器150の位置を検知するとともに、検体容器150のバーコードラベル150aが読み取られる。そして、ステップS25において、測定装置側制御部12は、駆動モータM3を駆動することにより一対の横送り部材33を駆動させて、所定の間隔(ラック151に収容された隣接する検体容器150間の間隔)毎にC地点のラック151を供給位置2aに向かって間欠的に横送りする。この一対の横送り部材33による横送りの動作は、一対のセンサ45の出力に基づいて監視される。そして、ステップS26において、測定装置側制御部12は、供給位置2aに位置する検体容器150を、センサ46とバーコードリーダとにより再度識別するとともに、血液凝固測定装置1のピアサ(図示せず)により検体容器150内の血液検体を吸引して分析する処理を実行する。そして、ステップS27において、測定装置側制御部12は、血液凝固測定装置1による血液検体の分析と並行して、ラック151を供給位置2aからD地点に向かって横送りする処理を実行する。
【0047】
そして、ステップS28において、測定装置側制御部12は、駆動モータM4を駆動することにより押出し部材34を移動させて、処理済の検体容器150を収容したラック151をD地点からE地点まで搬送する。そして、図6のステップS5の処理に移る。なお、ステップS21において、未処理容器ストック領域R1にラック151が存在しないと判断された場合や、ステップS22において、搬送装置2からスタート信号の通知がないと判断された場合には、図6のステップS5の処理に移る。
【0048】
次に、搬送装置2のオンラインモードでの動作制御について、図3〜図5および図9を参照して説明する。なお、オンラインモードでの分析装置140の動作制御は、測定装置側制御部12と搬送装置側制御部22とにより行われる。使用者が切替ボタン24を操作して動作モードをオフラインモードからオンラインモードに切り替えると、まず、搬送装置2による初期動作が行われる。この初期動作として、測定装置側制御部12および搬送装置側制御部22により搬送装置2を駆動させることにより、3つの空のラック151をそれぞれ搬送路21(図3参照)のA地点、D地点およびF地点に配置する。ここで、A地点に配置されているラック151に対する動作制御としては、ステップS32において、搬送装置側制御部22は、センサ41の出力に基づいて、A地点にラック151が存在するか否かを判断する。そして、ステップS32において、A地点にラック151が存在しないと判断された場合には、再びステップS32の判断がなされる。なお、このステップS32の判断は、A地点にラック151が存在すると判断されるまで繰り返し行われる。
【0049】
そして、ステップS32において、A地点にラック151が存在すると判断された場合には、ステップS33において、搬送装置側制御部22は、A地点にラック151が存在することを検体移載装置160に通知する。これにより、検体移載装置160は、搬送ライン120により搬送されている検体容器150を、図4および図5に示したハンド機構163を用いて、搬送装置2のA地点に存在するラック151に移載する。そして、ステップS34において、搬送装置側制御部22は、検体移載装置160から検体容器150の移載が完了したことを伝える通知があったか否かを判断する。そして、ステップS34において、検体移載装置160から検体容器150の移載が完了したことを伝える通知がないと判断された場合には、再びステップS34の判断がなされる。なお、このステップS34の判断は、検体移載装置160から検体容器150の移載が完了したことを伝える通知があったと判断されるまで繰り返し行われる。一方、ステップS34において、検体移載装置160から検体容器150の移載が完了したことを伝える通知があったと判断された場合には、ステップS35に進む。そして、ステップS35において、搬送装置側制御部22は、駆動モータM1を駆動させることにより押出し部材31を移動させて、ラック151をA地点からB地点に搬送する。
【0050】
そして、ステップS36において、搬送装置側制御部22は、血液凝固測定装置1にスタート信号を通知する。このステップS36における搬送装置2からのスタート信号の通知を起点として、血液凝固測定装置1側では、図8のステップS21〜S28に示したような血液凝固測定装置1によるラック151のB地点からE地点までの搬送処理が開始される。そして、搬送装置2側では、図9のステップS37において、搬送装置側制御部22は、センサ50の出力に基づいて、E地点にラック151が存在するか否かを判断する。そして、ステップS37において、E地点にラック151が存在しないと判断された場合には、再びステップS37の判断がなされる。なお、このステップS37の判断は、E地点にラック151が存在すると判断されるまで繰り返し行われる。そして、ステップS37において、E地点にラック151が存在すると判断された場合には、ステップS38において、搬送装置側制御部22は、駆動モータM5を駆動させることにより一対の搬送部材35を移動させて、ラック151をE地点からF地点に搬送する。そして、ステップS39において、搬送装置側制御部22は、センサ51の出力に基づいて、F地点にラック151が存在するか否かを判断する。
【0051】
そして、ステップS39において、F地点にラック151が存在しないと判断された場合には、再びステップS39の判断がなされる。なお、このステップS39の判断は、F地点にラック151が存在すると判断されるまで繰り返し行われる。そして、ステップS39において、F地点にラック151が存在すると判断された場合には、ステップS40において、搬送装置側制御部22は、駆動モータM6を駆動させることにより送出し部材36を移動させて、ラック151をF地点からA地点に搬送する。その後、ステップS32に戻り、再び、A地点にラック151が存在するか否かが判断される。そして、ステップS32において、A地点にラック151が存在すると判断された場合には、ステップS33において、A地点にラック151が存在することを検体移載装置160に通知する。これにより、検体移載装置160は、搬送装置2のA地点に存在するラック151から処理済の検体容器150をハンド機構163を用いて、搬送ライン120へと移載する。その後、搬送ライン120により搬送されている未処理の検体容器150をハンド機構163を用いて、搬送装置2のA地点に存在するラック151に移載する。そして、ステップS34において、検体移載装置160から検体容器150の移載が完了したことを伝える通知があったか否かが判断され、ラック151の搬送が行われる。
【0052】
なお、上記したステップS32〜S40では、初期動作によりA地点に存在するラック151に対する動作制御について説明したが、初期動作によりD地点およびF地点に存在する2つのラック151に対しても上記と同様の動作制御が並行して行われる。
【0053】
本実施形態では、上記のように、搬送装置2を、搬送ライン120によって搬送される検体容器150を受け取って搬送するオンラインモードと、搬送ライン120から独立して検体容器150を搬送するオフラインモードとで動作可能に構成することによって、オフラインモードにより搬送装置2を搬送ライン120から独立して動作させることができるので、搬送ライン120が故障などにより停止した場合でも、オフラインモードに設定することにより、血液凝固測定装置1に対する血液検体の供給位置2aに検体容器150を搬送することができる。その結果、搬送ライン120が故障などにより停止した場合でも、血液検体の処理を継続して行うことができる。
【0054】
また、本実施形態では、上記のように、オンラインモードにおける搬送装置2の動作を、血液凝固測定装置1の測定装置側制御部12と搬送装置2の搬送装置側制御部22とにより制御するように構成することによって、オンラインモードにおける搬送装置2の動作の少なくとも一部が搬送装置側制御部22により制御されるので、血液凝固測定装置1および搬送装置2の制御を測定装置側制御部12のみで行う場合に比べて、血液凝固測定装置1の測定装置側制御部12の負担を軽減することができる。
【0055】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0056】
たとえば、上記実施形態では、本発明を、検体移載装置を用いて、検体容器を搬送ラインと搬送装置との間で移動するように構成された分析装置に適用する例について説明したが、本発明はこれに限らず、検体移載装置を用いずに、搬送ラインとの間で直接検体容器の受取りおよび受渡しを行うように構成された分析装置に本発明を適用してもよい。
【0057】
また、上記実施形態では、本発明を、検体処理ユニットの一例としての血液凝固測定装置に検体を供給するための搬送装置に適用する例について説明したが、本発明はこれに限らず、検体処理ユニットとしての血球計数装置、免疫凝集測定装置、塗抹標本作製装置および尿分析装置などに検体を供給するための搬送装置に本発明を広く適用可能である。
【0058】
また、上記実施形態では、オンラインモードにおける搬送装置の動作を、血液凝固測定装置の測定装置側制御部と搬送装置の搬送装置側制御部とで制御するとともに、オフラインモードにおける搬送装置の動作を、血液凝固測定装置の測定装置側制御部で制御するように構成したが、本発明はこれに限らず、搬送装置のオンラインモードおよびオフラインモードにおけるすべての動作を、血液凝固測定装置の測定装置側制御部で制御するようにしてもよいし、搬送装置のオンラインモードおよびオフラインモードにおけるすべての動作を、搬送装置の搬送装置側制御部で制御するようにしてもよい。
【0059】
また、上記実施形態では、オンラインモードにおいて、搬送装置により3つのラックを搬送する例について示したが、本発明はこれに限らず、オンラインモードにおいて、4つ以上のラックを同時に搬送可能な搬送装置に本発明を適用してもよい。
【0060】
また、上記実施形態では、本発明を、4つの分析装置を備えた検体処理システムに適用する例について説明したが、本発明はこれに限らず、3つ以下または5つ以上の分析装置を備えた検体処理システムに本発明を適用しても同様の効果を得ることが可能である。
【0061】
また、上記実施形態では、オンラインモードにおける初期位置を搬送路上のA地点に設定するとともに、オフラインモードにおける初期位置を搬送路上の未処理容器ストック領域R1に設定する例について説明したが、本発明はこれに限らず、オンラインモードにおける初期位置とオフラインモードにおける初期位置とを搬送路上の同じ位置(たとえばA地点)に設定してもよい。
【0062】
また、上記実施形態では、オンラインモードとオフラインモードとの切り替えを行う切替ボタンを搬送装置に設ける例について説明したが、本発明はこれに限らず、オンラインモードとオフラインモードとの切り替えを行う切替ボタンを血液凝固測定装置に設けてもよい。
【図面の簡単な説明】
【0063】
【図1】本発明の一実施形態による検体処理システムの全体構成を示した概略図である。
【図2】図1に示した一実施形態による検体処理システムにおける分析装置を示した斜視図である。
【図3】図2に示した一実施形態による検体処理システムにおける分析装置の構成を示したブロック図である。
【図4】図1に示した一実施形態による検体処理システムにおける検体移載装置の構成を示したブロック図である。
【図5】図4に示した一実施形態による検体処理システムにおける検体移載装置のハンド機構を示した斜視図である。
【図6】図2に示した一実施形態による検体処理システムにおける分析装置の血液凝固測定装置の動作制御を示したフローチャートである。
【図7】図2に示した一実施形態による検体処理システムにおける分析装置の血液凝固測定装置のオフラインモードにおける動作制御を示したフローチャートである。
【図8】図2に示した一実施形態による検体処理システムにおける分析装置の血液凝固測定装置のオンラインモードにおける動作制御を示したフローチャートである。
【図9】図2に示した一実施形態による検体処理システムにおける分析装置の搬送装置のオンラインモードにおける動作制御を示したフローチャートである。
【符号の説明】
【0064】
1 血液凝固測定装置(検体処理ユニット)
2 搬送装置(搬送ユニット)
12 測定装置側制御部(第1制御部)
21 搬送路
22 搬送装置側制御部(第2制御部)
24 切替ボタン(切替手段)
100 検体処理システム
120 搬送ライン
140 分析装置(検体処理装置)
150 検体容器
151 ラック
160 検体移載装置
【特許請求の範囲】
【請求項1】
検体を処理する検体処理ユニットと、
前記検体処理ユニットに前記検体を供給するための供給位置に、前記検体を収容した検体容器を搬送する搬送ユニットとを備え、
前記搬送ユニットは、外部に設けられた搬送ラインによって搬送される前記検体容器を受け取って搬送する第1モードと、前記搬送ラインから独立して前記検体容器を搬送する第2モードとで動作可能である、検体処理装置。
【請求項2】
前記搬送ユニットは、前記第1モードにおいて、前記搬送ユニットの第1初期位置から前記供給位置を通って前記第1初期位置に戻る経路で前記検体容器を搬送し、
前記検体容器の前記搬送ラインからの受取りと、前記検体容器の前記搬送ラインへの受渡しとが前記第1初期位置で行われる、請求項1に記載の検体処理装置。
【請求項3】
前記搬送ユニットは、
前記第1モードにおいて、複数の前記検体容器を収容可能なラックを前記第1初期位置に停止させ、
前記ラックに前記複数の検体容器が収容された後、前記ラックを前記供給位置に搬送する、請求項2に記載の検体処理装置。
【請求項4】
前記搬送ユニットは、前記第2モードにおいて、前記搬送ユニットの第2初期位置から前記供給位置を通って前記第2初期位置とは異なる所定位置まで前記検体容器を搬送する、請求項1〜3のいずれか1項に記載の検体処理装置。
【請求項5】
前記第2初期位置とは異なる所定位置は、前記検体処理ユニットへの前記検体の供給が終了した検体容器をストックするための処理済容器ストック位置である、請求項4に記載の検体処理装置。
【請求項6】
前記第2初期位置は、前記検体処理ユニットへの前記検体の供給が行われていない検体容器をストックするための未処理容器ストック位置である、請求項4または5に記載の検体処理装置。
【請求項7】
前記搬送ユニットは、
環状の搬送路を含み、
前記第1モードにおいて、複数の前記検体容器を前記環状の搬送路上を搬送する、請求項1〜6のいずれか1項に記載の検体処理装置。
【請求項8】
前記環状の搬送路は、平面的に見て四角形状の搬送路である、請求項7に記載の検体処理装置。
【請求項9】
前記検体処理ユニットおよび前記搬送ユニットの少なくとも一方は、前記第1モードと前記第2モードとを切り替える切替手段を含む、請求項1〜8のいずれか1項に記載の検体処理装置。
【請求項10】
前記検体処理ユニットは、少なくとも前記検体処理ユニットを制御するための第1制御部を含み、
前記搬送ユニットは、少なくとも前記搬送ユニットを制御するための第2制御部を含む、請求項1〜9のいずれか1項に記載の検体処理装置。
【請求項11】
前記第1制御部は、前記検体処理ユニットおよび前記搬送ユニットを制御し、
前記第1モードにおける前記搬送ユニットの動作は、前記第1制御部および前記第2制御部によって制御される、請求項10に記載の検体処理装置。
【請求項12】
前記第1制御部は、前記検体処理ユニットおよび前記搬送ユニットを制御し、
前記第1モードにおける前記搬送ユニットの動作は、前記第1制御部および前記第2制御部によって制御され、
前記第2モードにおける前記搬送ユニットの動作は、前記第1制御部によって制御される、請求項10に記載の検体処理装置。
【請求項13】
検体を処理する検体処理ユニットと、前記検体処理ユニットに前記検体を供給するための供給位置に前記検体を収容した検体容器を搬送する搬送ユニットとを含む検体処理装置と、
外部に設けられた搬送ラインによって搬送される前記検体容器を前記搬送ユニットに移動させるとともに、前記搬送ユニットによって搬送される前記検体容器を前記搬送ラインに移動させる検体移載装置とを備え、
前記搬送ユニットは、前記搬送ラインによって搬送される前記検体容器を、前記検体移載装置を介して受け取って搬送した後、前記検体移載装置を介して前記搬送ラインに受け渡す第1モードと、前記搬送ラインから独立して前記検体容器を搬送する第2モードとで動作可能である、検体処理システム。
【請求項14】
前記搬送ユニットは、前記第1モードにおいて、前記検体容器を収容するためのラックが前記搬送ユニットの初期位置に存在する場合に、前記ラックが前記搬送ユニットの初期位置に存在することを前記検体移載装置に通知する、請求項13に記載の検体処理システム。
【請求項15】
前記搬送ユニットは、前記検体移載装置から前記検体容器の前記ラックへの移載の完了の通知を受けたことに応答して、前記ラックを前記初期位置から前記供給位置に搬送する、請求項14に記載の検体処理システム。
【請求項16】
検体を収容した検体容器を搬送する搬送ラインと、
前記搬送ラインによって搬送される前記検体容器を受け取って処理する検体処理装置とを備え、
前記検体処理装置は、
前記検体を処理する検体処理ユニットと、
前記検体処理ユニットに前記検体を供給するための供給位置に、前記検体容器を搬送する搬送ユニットとを含み、
前記搬送ユニットは、前記搬送ラインによって搬送される前記検体容器を受け取って搬送する第1モードと、前記搬送ラインから独立して前記検体容器を搬送する第2モードとで動作可能である、検体処理システム。
【請求項1】
検体を処理する検体処理ユニットと、
前記検体処理ユニットに前記検体を供給するための供給位置に、前記検体を収容した検体容器を搬送する搬送ユニットとを備え、
前記搬送ユニットは、外部に設けられた搬送ラインによって搬送される前記検体容器を受け取って搬送する第1モードと、前記搬送ラインから独立して前記検体容器を搬送する第2モードとで動作可能である、検体処理装置。
【請求項2】
前記搬送ユニットは、前記第1モードにおいて、前記搬送ユニットの第1初期位置から前記供給位置を通って前記第1初期位置に戻る経路で前記検体容器を搬送し、
前記検体容器の前記搬送ラインからの受取りと、前記検体容器の前記搬送ラインへの受渡しとが前記第1初期位置で行われる、請求項1に記載の検体処理装置。
【請求項3】
前記搬送ユニットは、
前記第1モードにおいて、複数の前記検体容器を収容可能なラックを前記第1初期位置に停止させ、
前記ラックに前記複数の検体容器が収容された後、前記ラックを前記供給位置に搬送する、請求項2に記載の検体処理装置。
【請求項4】
前記搬送ユニットは、前記第2モードにおいて、前記搬送ユニットの第2初期位置から前記供給位置を通って前記第2初期位置とは異なる所定位置まで前記検体容器を搬送する、請求項1〜3のいずれか1項に記載の検体処理装置。
【請求項5】
前記第2初期位置とは異なる所定位置は、前記検体処理ユニットへの前記検体の供給が終了した検体容器をストックするための処理済容器ストック位置である、請求項4に記載の検体処理装置。
【請求項6】
前記第2初期位置は、前記検体処理ユニットへの前記検体の供給が行われていない検体容器をストックするための未処理容器ストック位置である、請求項4または5に記載の検体処理装置。
【請求項7】
前記搬送ユニットは、
環状の搬送路を含み、
前記第1モードにおいて、複数の前記検体容器を前記環状の搬送路上を搬送する、請求項1〜6のいずれか1項に記載の検体処理装置。
【請求項8】
前記環状の搬送路は、平面的に見て四角形状の搬送路である、請求項7に記載の検体処理装置。
【請求項9】
前記検体処理ユニットおよび前記搬送ユニットの少なくとも一方は、前記第1モードと前記第2モードとを切り替える切替手段を含む、請求項1〜8のいずれか1項に記載の検体処理装置。
【請求項10】
前記検体処理ユニットは、少なくとも前記検体処理ユニットを制御するための第1制御部を含み、
前記搬送ユニットは、少なくとも前記搬送ユニットを制御するための第2制御部を含む、請求項1〜9のいずれか1項に記載の検体処理装置。
【請求項11】
前記第1制御部は、前記検体処理ユニットおよび前記搬送ユニットを制御し、
前記第1モードにおける前記搬送ユニットの動作は、前記第1制御部および前記第2制御部によって制御される、請求項10に記載の検体処理装置。
【請求項12】
前記第1制御部は、前記検体処理ユニットおよび前記搬送ユニットを制御し、
前記第1モードにおける前記搬送ユニットの動作は、前記第1制御部および前記第2制御部によって制御され、
前記第2モードにおける前記搬送ユニットの動作は、前記第1制御部によって制御される、請求項10に記載の検体処理装置。
【請求項13】
検体を処理する検体処理ユニットと、前記検体処理ユニットに前記検体を供給するための供給位置に前記検体を収容した検体容器を搬送する搬送ユニットとを含む検体処理装置と、
外部に設けられた搬送ラインによって搬送される前記検体容器を前記搬送ユニットに移動させるとともに、前記搬送ユニットによって搬送される前記検体容器を前記搬送ラインに移動させる検体移載装置とを備え、
前記搬送ユニットは、前記搬送ラインによって搬送される前記検体容器を、前記検体移載装置を介して受け取って搬送した後、前記検体移載装置を介して前記搬送ラインに受け渡す第1モードと、前記搬送ラインから独立して前記検体容器を搬送する第2モードとで動作可能である、検体処理システム。
【請求項14】
前記搬送ユニットは、前記第1モードにおいて、前記検体容器を収容するためのラックが前記搬送ユニットの初期位置に存在する場合に、前記ラックが前記搬送ユニットの初期位置に存在することを前記検体移載装置に通知する、請求項13に記載の検体処理システム。
【請求項15】
前記搬送ユニットは、前記検体移載装置から前記検体容器の前記ラックへの移載の完了の通知を受けたことに応答して、前記ラックを前記初期位置から前記供給位置に搬送する、請求項14に記載の検体処理システム。
【請求項16】
検体を収容した検体容器を搬送する搬送ラインと、
前記搬送ラインによって搬送される前記検体容器を受け取って処理する検体処理装置とを備え、
前記検体処理装置は、
前記検体を処理する検体処理ユニットと、
前記検体処理ユニットに前記検体を供給するための供給位置に、前記検体容器を搬送する搬送ユニットとを含み、
前記搬送ユニットは、前記搬送ラインによって搬送される前記検体容器を受け取って搬送する第1モードと、前記搬送ラインから独立して前記検体容器を搬送する第2モードとで動作可能である、検体処理システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−189311(P2006−189311A)
【公開日】平成18年7月20日(2006.7.20)
【国際特許分類】
【出願番号】特願2005−1045(P2005−1045)
【出願日】平成17年1月6日(2005.1.6)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
【公開日】平成18年7月20日(2006.7.20)
【国際特許分類】
【出願日】平成17年1月6日(2005.1.6)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
[ Back to top ]