
検体処理装置
【課題】検体ラックの搬送が中断された場合に、ユーザの負担の軽減を図りながら、検体ラックの搬送を再開させることができる検体処理装置を提供する。
【解決手段】検体処理装置は、検体取込位置52、53に位置づけられた検体容器Tから検体を取り込んで所定の処理を行うための測定ユニット10と、複数の検体容器Tを保持可能な検体ラックLを検体取込位置52、53に向けて搬送するための搬送ユニット50を備えている。検体ラックLの搬送動作中に搬送中断原因が生じると、搬送ユニット50による搬送動作が中断され、検体ラックLが停止していた位置から、搬送ユニット50による検体ラックLの搬送が再開される。このため、搬送動作の再開にあたり、検体ラックLをラックセット領域Aに戻す必要がなくなる。これにより、ユーザの負担が軽減されながら、検体ラックLの搬送動作が再開され得る。
【解決手段】検体処理装置は、検体取込位置52、53に位置づけられた検体容器Tから検体を取り込んで所定の処理を行うための測定ユニット10と、複数の検体容器Tを保持可能な検体ラックLを検体取込位置52、53に向けて搬送するための搬送ユニット50を備えている。検体ラックLの搬送動作中に搬送中断原因が生じると、搬送ユニット50による搬送動作が中断され、検体ラックLが停止していた位置から、搬送ユニット50による検体ラックLの搬送が再開される。このため、搬送動作の再開にあたり、検体ラックLをラックセット領域Aに戻す必要がなくなる。これにより、ユーザの負担が軽減されながら、検体ラックLの搬送動作が再開され得る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、血液等の検体に対し処理を行う検体処理装置に関する。
【背景技術】
【0002】
従来、検体ラックに保持された検体容器から検体を吸引して処理を行う検体処理装置が知られている(たとえば、特許文献1参照)。この種の検体処理装置では、検体容器を保持した検体ラックを吸引位置に搬送するための搬送部が配されている。複数の検体容器を保持した検体ラックが搬送部上のラックセット領域にセットされる。ラックセット領域にセットされた検体ラックは、搬送部により測定部前の吸引位置に向かって搬送され、検体ラックに収容された各検体容器が、順次、吸引位置に位置づけられる。また、吸引位置へ検体ラックが搬送される間に、バーコードリーダによって、検体ラックに収容された全ての検体容器のバーコードが読み取られる。検体ラックに収容された全ての検体容器内の検体について吸引が終了すると、検体ラックが搬送部上のラック収容領域に搬送される。
【0003】
このような検体処理装置では、検体ラックの搬送動作中に所定の中断原因が発生すると、検体ラックの搬送動作が中断される。この場合、ユーザは、検体ラックを中断位置からラックセット領域に戻した後、検体ラックの搬送動作を再開させていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−32688号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記検体処理装置では、検体ラックの搬送が中断されると、ユーザは、検体ラックをラックセット領域に戻した後、搬送動作を再開させなければならず、ユーザの手間がかかるとの問題が生じる。
【0006】
かかる事情に鑑み、本発明は、検体ラックの搬送が中断された場合に、ユーザの負担の軽減を図りながら、検体ラックの搬送を再開させることができる検体処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の主たる態様に係る検体処理装置は、検体取込位置に位置づけられた検体容器から検体を取り込んで所定の処理を行うための検体処理部と、検体容器を保持可能な検体ラックを前記検体取込位置に向けて搬送するための搬送部と、前記検体ラックの搬送動作中に搬送中断原因が生じると、前記搬送部による前記検体ラックの搬送を停止させる停止処理を実行し、前記停止処理により前記検体ラックが停止した停止位置から、前記搬送部による前記検体ラックの搬送動作を再開させる搬送制御手段とを備える。
【0008】
本態様に係る検体処理装置によれば、検体ラックの搬送が停止された場合でも、検体ラックが停止した停止位置から検体ラックの搬送動作が再開される。このため、搬送動作の再開にあたり、検体ラックを搬送開始位置に戻すといった煩雑な作業を省略することができる。よって、操作者の負担の軽減を図りながら、検体ラックの搬送動作を再開させることができる。
【0009】
本態様に係る検体処理装置において、前記搬送部は、前記検体ラックと係合するよう駆動される係合機構と、前記係合機構を駆動する係合駆動部と、前記検体ラックに係合した前記係合機構を前記搬送方向に移動させるための移動機構と、前記移動機構を駆動するモータと、前記モータを駆動するモータ駆動部と、を備え、前記搬送制御手段は、前記搬送動作の中断中、前記係合機構が前記検体ラックに係合した状態で前記モータに励磁がかけ続けられるように、前記係合駆動部および前記モータ駆動部を制御するよう構成され得る。こうすると、搬送動作の中断中に検体ラックの位置がずれることが抑制されるため、不具合なく搬送動作を再開させることができる。
【0010】
また、本態様に係る検体処理装置において、前記搬送制御手段は、搬送経路上における前記検体ラックの位置に関する情報を取得し、前記停止位置に関する情報と、前記再開時における前記検体ラックの位置に関する情報とに基づいて、前記搬送部に前記検体ラックの搬送動作を再開させるよう構成され得る。こうすると、搬送動作の中断中に検体ラックの位置がずれても、ずれた後の検体ラックの位置が分かるため、不具合なく搬送動作を再開させることができる。
【0011】
また、本態様に係る検体処理装置において、前記搬送部は、前記検体ラックと係合するよう駆動される係合機構と、前記係合機構を駆動するための係合駆動部と、を有し、前記搬送制御手段は、前記搬送動作の中断中、前記係合機構が前記検体ラックに係合した状態を維持するよう、前記係合駆動部を制御するよう構成され得る。こうすると、搬送動作の中断中に、誤って、検体ラックが取り換えられるのを防止できるため、検体に対する処理を適正に行うことができる。
【0012】
また、本態様に係る検体処理装置において、前記搬送制御手段は、前記停止処理として、前記搬送中断原因が生じた時点における前記検体ラックの位置から所定位置に前記検体ラックを搬送した後、前記検体ラックを停止させる処理を実行するよう構成され得る。こうすると、検体ラックを搬送開始位置などに一旦移動させてから搬送動作を再開させるといった複雑な制御を伴うことなく、より簡易に搬送動作を再開させることができる。
【0013】
この構成において、前記搬送部は、前記検体ラックの搬送経路の一部を覆うための蓋部を備え、前記所定位置は、前記蓋部で覆われた位置とされ得る。こうすると、搬送動作の中断の際に、蓋部に覆われていない領域に検体容器が位置付けられていても、中断中は、検体ラックに保持された全ての検体容器が蓋部によって覆われることとなる。これにより、搬送動作の中断中に、検体ラックに保持された検体容器中の検体に異物が混入するのを防止することができ、且つ、この検体ラックに保持された検体容器が誤って取り換えられるのを防止することができる。よって、検体に対する処理を適正に行うことができる。
【0014】
また、本態様に係る検体処理装置において、前記検体処理部は、前記検体ラックに保持された検体容器から検体を吸引するためのピペットを含み、前記搬送制御手段は、検体容器内に前記ピペットが挿入されているときに前記搬送中断原因が生じると、前記ピペットが当該検体容器から取り出された後に、前記検体ラックを前記所定位置に搬送させるよう構成され得る。こうすると、検体ラックを所定位置に移動させるときに、検体容器にピペットが接触するのを防止することができる。
【0015】
また、本態様に係る検体処理装置において、前記検体ラックは複数の検体容器を保持可能であり、前記搬送制御手段は、前記検体ラックに保持された検体容器が前記検体取込位置に位置しているときに前記搬送中断原因が生じた場合には、搬送動作の再開時において、既に検体の取り込みが完了した検体容器は前記検体取込位置に移動させず、未だ検体の取り込みが完了していない検体容器を前記検体取込位置に移動させるよう、前記搬送部による搬送動作を制御するよう構成され得る。こうすると、検体の取り込みが完了している検体容器からは検体の取り込みが行われないため、効率的に搬送動作を再開させることができる。
【0016】
この場合、検体処理装置は、前記検体ラックに保持された各検体容器に対する検体の取込状況を記憶する記憶部をさらに備える構成とされ、前記搬送制御手段は、前記記憶部に記憶された前記取込状況に基づいて、前記搬送部による搬送再開動作を制御するよう構成され得る。
【0017】
また、本態様に係る検体処理装置は、前記検体ラックは複数の検体容器を保持可能であり、前記検体取込位置に向かう搬送経路の途中において前記検体ラックに保持された各検体容器の識別情報を読み取る識別情報読取部をさらに備え、前記搬送制御手段は、前記検体ラックに保持された全ての検体容器について識別情報の読み取りが完了した後に前記搬送中断原因が生じた場合、搬送動作の再開時において、前記検体ラックを、前記識別情報読取部による読取位置に戻すことなく、前記検体取込位置に向けて搬送するよう、前記搬送部を制御する構成とされ得る。こうすると、搬送動作の再開時に、再度、検体容器の識別情報が読み取られることがないため、検体容器を迅速に、検体取込位置に送ることができる。
【0018】
この構成において、前記搬送制御手段は、前記識別情報読取部による前記識別情報の読み取り動作の途中で前記搬送中断原因が生じた場合、搬送動作の再開時において、前記検体ラックに保持された残り全ての検体容器に対する識別情報の読み取りが完了した後に、前記検体ラックを前記検体取込位置に向けて搬送するよう、前記搬送部を制御する構成とされ得る。
【0019】
また、本態様に係る検体処理装置は、前記搬送部の搬送動作が中断された場合に、搬送途上にある前記検体ラックを操作者が搬送動作の再開のために移動させる必要がない旨を通知する通知手段をさらに備えるよう構成され得る。こうすると、操作者が、誤って検体ラックを搬送開始位置に移動させようとするのを防止することができる。
【0020】
また、本態様に係る検体処理装置は、前記検体処理部に用いられる試薬の残量が所定量未満であること、前記検体処理部に用いられるキュベットの残量が所定量未満であること、前記検体処理部に用いられる洗浄水の残量が所定量未満であること、および、前記搬送部に所定数以上の検体ラックが貯留されていること、の少なくとも一つを検出する検出手段を備え、前記搬送中断原因は、前記検出手段が前記検出を行ったこととされ得る。
【0021】
また、本態様に係る検体処理装置は、前記搬送部の搬送動作の中断指示を受け付ける受付手段を備え、前記搬送中断原因は、前記受付手段が前記中断指示を受け付けたことを含むものとされ得る。
【発明の効果】
【0022】
以上のとおり、検体ラックの搬送が中断された場合に、ユーザの負担の軽減を図りながら、検体ラックの搬送を再開させることができる検体処理装置を提供することができる。
【0023】
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。ただし、以下に示す実施の形態は、あくまでも、本発明を実施化する際の一つの例示であって、本発明は、以下の実施の形態により何ら制限されるものではない。
【図面の簡単な説明】
【0024】
【図1】実施形態に係る検体処理装置の構成を示す図である。
【図2】実施形態に係る測定装置の内部の概略構成を示す平面図である。
【図3】実施形態に係る検体容器と検体ラックの構成を示す図である。
【図4】実施形態に係る搬送ユニットの構成を示す平面図である。
【図5】実施形態に係る係合ユニットの要部を示す概略図である。
【図6】実施形態に係る搬送ユニットの斜視図である。
【図7】実施形態に係る測定装置の回路構成を示す図である。
【図8】実施形態に係る情報処理装置の回路構成を示す図である。
【図9】実施形態に係る情報処理装置の表示部に表示される試薬情報画面の例示図である。
【図10】実施形態に係る検体吸引処理を示すフローチャートである。
【図11】実施形態に係る中断・再開処理を示すフローチャートである。
【図12】実施形態に係る情報処理装置の表示部に表示される測定中断メッセージの例示図である。
【図13】実施形態に係る中断・再開処理を示すフローチャートの変更例である。
【図14】実施形態に係る先行ラックと後行ラックの搬送制御リストを示す図である。
【図15】実施形態に係るジョブリストを示す図である。
【図16】実施形態に係る検体ラック停止処理を示すフローチャートである。
【図17】実施形態に係る搬送再開処理を示すフローチャートである。
【図18】実施形態に係る排出処理と、ジョブリスト表示処理を示すフローチャートである。
【図19】実施形態に係る検体ラック排出処理を示すフローチャートである。
【発明を実施するための形態】
【0025】
以下、本実施の形態に係る検体処理装置について、図面を参照して説明する。
【0026】
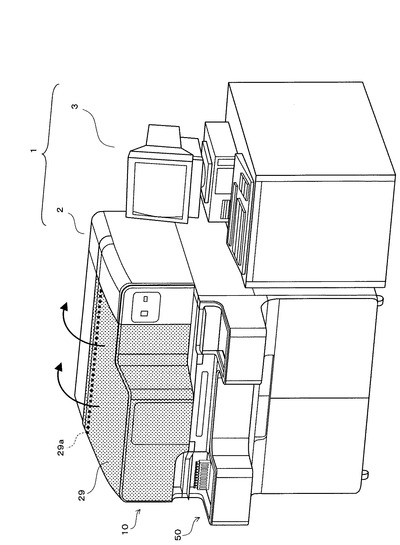
図1は、本実施の形態に係る検体処理装置1の構成を示す図である。検体処理装置1は、検体(血漿)に試薬を添加することで調製された測定試料に光を照射して、凝固法、合成基質法、免疫比濁法および凝集法を用いて、検体の光学的な測定および分析を行う血液凝固分析装置である。検体処理装置1は、検体(血漿)に含まれる成分を光学的に測定する測定装置2と、測定装置2による測定データを分析するとともに、測定装置2に操作指示を与える情報処理装置3とで構成されている。
【0027】
測定装置2には、図示の如く、本体カバー29が設けられている。本体カバー29は、回転軸29aを中心として図示のように回動し、これにより、後述する測定ユニット10内が開閉可能となる。
【0028】
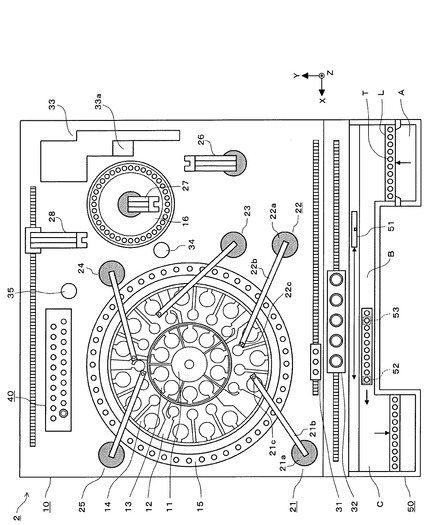
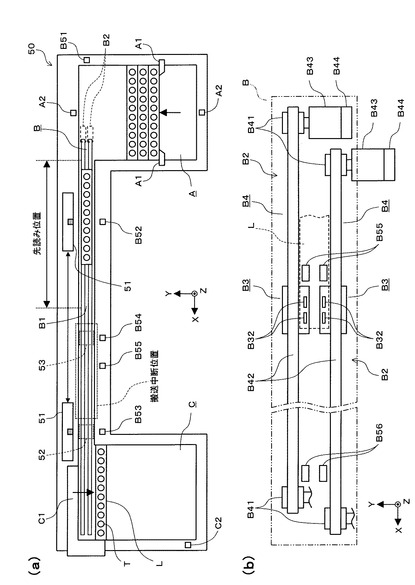
図2は、測定装置2の内部を上方向から見たときの概略構成を示す平面図である。測定装置2は、測定ユニット10と、検出ユニット40と、搬送ユニット50とによって構成されている。
【0029】
搬送ユニット50には、図示の如く、検体ラックLを載置可能なラックセット領域Aと、搬送領域Bと、ラック収容領域Cが設けられている。検体ラックLには検体容器Tを複数保持できるよう保持部が形成されており、検体容器Tには測定を行う検体が収容されている。
【0030】
ラックセット領域Aにセットされた検体ラックLは、ラックセット領域Aに沿って奥方向(Y軸正方向)に搬送され、搬送領域Bの右端(X軸負方向の端)に送り出される。搬送領域Bの右端に位置づけられた検体ラックLは、搬送領域Bに沿って左方向(X軸正方向)に搬送される。
【0031】
搬送領域Bには、図示の如く、左右(X軸正方向および負方向)に移動可能なバーコードリーダ51が設置されている。バーコードリーダ51は、検体容器Tと検体ラックLにそれぞれ貼付されたバーコードラベルを、搬送領域B上の所定位置にて読み取る。また、搬送領域Bの所定位置には、検体吸引位置52、53が設定されている。
【0032】
検体吸引位置52、53に検体容器Tが位置づけられると、かかる検体容器Tに収容されている検体は、それぞれ、後述する検体分注ユニット21、22によって吸引される。検体ラックLに保持されている検体容器Tの検体が全て吸引されると、かかる検体ラックLは、搬送領域Bの左端まで搬送される。
【0033】
なお、本実施の形態の検体処理装置1は、“標準測定”と“微量測定”の2種類の測定モードが選択可能に構成されている。検体容器Tの検体は、標準測定時には検体吸引位置52において検体分注ユニット21により吸引され、微量測定時には検体吸引位置53において検体分注ユニット22により吸引される。
【0034】
搬送領域Bの左端に位置づけられた検体ラックLは、ラック収容領域Cに沿って手前方向(Y軸負方向)に移動され、かかる検体ラックLの搬送動作が終了する。搬送ユニット50の搬送動作は、ラックセット領域Aにセットされた全ての検体ラックLに対して連続して行われる。
【0035】
検体分注ユニット21は、支持部21aと、支持部21aに支持されたアーム21bと、アーム21bの先端に取り付けられたピペット21cを備えている。支持部21aは、下面裏側に配されたステッピングモータ211a(図7参照)により回転駆動され、アーム21bは、ステッピングモータ211aにより上下方向(Z軸正方向および負方向)に駆動される。ピペット21cが用いられることにより検体が吸引され吐出される。支持部21aが回転駆動されると、ピペット21cが支持部21aを中心とした円周上を移動する。
【0036】
同様に、検体分注ユニット22も、検体分注ユニット21と同様の構成となっている。すなわち、検体分注ユニット22は、支持部22aと、アーム22bと、アーム22bの先端に取り付けられたピペット22cを備えている。支持部22aは、下面裏側に配されたステッピングモータ211b(図7参照)により回転駆動され、アーム22bは、ステッピングモータ211bにより上下方向に駆動される。ピペット22cが用いられることにより、検体が吸引され吐出される。
【0037】
検体吸引時、検体分注ユニット21、22は、まず、支持部21a、22aを回動させ、ピペット21c、22cを検体吸引位置52、53上に位置づける。しかる後、アーム21b、22bが下方向に駆動され、ピペット21c、22cが検体容器T内に挿入される。その後、吸引が完了すると、アーム21b、22bが上方向に駆動され、ピペット21c、22cが検体容器Tから抜き出される。
【0038】
検体吸引位置52、53にて吸引された検体は、直接またはキュベットテーブル15上のキュベットを経由して、キュベット搬送器31上のキュベットに収容される。その際、適宜、希釈液搬送器32にセットされた希釈液が検体分注ユニット22により吸引され、キュベットに混和される。その後、キュベット搬送器31が右方向(X軸負方向)に駆動され、キュベットがキャッチャユニット26の前に搬送される。続いて、キャッチャユニット26により、キュベット搬送器31にセットされたキュベットが把持され、加温テーブル16にセットされる。その後、キュベットは、キャッチャユニット27、28により搬送され、検出ユニット40にセットされる。その際、試薬分注ユニット23、24、25により、適宜、試薬テーブル11、12に保持された試薬がキュベットに注入される。その後、検出ユニット40による処理が行われ、キュベット中の測定試料に含まれる成分を反映した光学的情報が検出される。
【0039】
キュベット供給ユニット33は、投入された複数のキュベットを、キュベット貯留部33aに順次供給することが可能に構成されている。キュベット貯留部33aに供給された新しいキュベットは、キャッチャユニット26、27により、それぞれ、キュベットテーブル15とキュベット搬送器31の保持孔にセットされる。また、分析が終了し不要となったキュベットは、キャッチャユニット27、28により、それぞれ、廃棄口34、35に廃棄される。なお、検体分注ユニット21、22と試薬分注ユニット23〜25のピペットは、所定の洗浄位置(図示せず)で洗浄される。洗浄に用いられた洗浄液は、廃液タンク(図示せず)に収容される。
【0040】
試薬テーブル11、12には、それぞれ、容器ラック13、14が載置されている。この容器ラック13、14には、複数の試薬容器が保持されており、かかる試薬容器に試薬が収容されている。試薬容器に収容されている試薬の交換などを行う場合には、測定ユニット10の測定動作が中断された後、図1に示す本体カバー29が開放される。これにより、操作者は、試薬テーブル11、12から試薬容器を取り出して、試薬の交換などを行うことができる。
【0041】
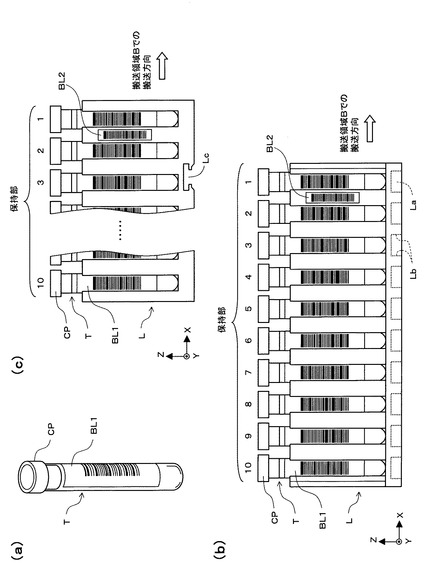
図3は、検体容器Tと検体ラックLの構成を示す図である。同図(a)は、検体容器Tの外観を示す斜視図であり、同図(b)、(c)は、検体ラックLの正面図である。なお、同図(b)、(c)は、検体ラックLが搬送ユニット50にセットされたとき、検体ラックLを図2のY軸負方向に見たときの正面図である。
【0042】
図3(a)を参照して、検体容器Tは、透光性を有するガラスまたは合成樹脂により構成された管状容器であり、上端が開口している。内部には患者から採取された血液検体が収容され、上端の開口は蓋部CPにより密封されている。検体容器Tの側面には、バーコードラベルBL1が貼付されている。バーコードラベルBL1には、検体IDを示すバーコードが印刷されている。
【0043】
同図(b)を参照して、検体ラックLには、10本の検体容器Tを垂直状態(立位状態)で並べて保持することが可能となるよう10個の保持部が形成されている。保持部には、右から1〜10の保持位置の番号が割り当てられている。また、検体ラックLのY軸正方向の側面には、バーコードラベルBL2が貼付されている。バーコードラベルBL2には、ラックIDを示すバーコードが印刷されている。
【0044】
また、同図(b)に示す如く、検体ラックLの底面には、下方に開放された凹部Laが、検体ラックLの長手方向に沿って保持部と同数の10個形成されている。各凹部Laは、各凹部Laの左右に配された璧部Lbによって区画されている。
【0045】
なお、検体ラックLは、同図(c)のように構成されても良い。この場合の検体ラックLの底面には、凹部Lcが1個形成されている。
【0046】
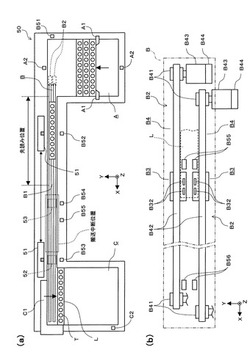
図4(a)は、搬送ユニット50の構成を示す平面図である。
【0047】
ラックセット領域Aには、載置された検体ラックLをY軸正方向に搬送するラック送込機構A1が設けられている。ラック送込機構A1は、ラックセット領域Aに載置された検体ラックLの手前(Y軸負方向)の側面を押してY軸正方向に搬送し、かかる検体ラックLを搬送領域Bに送り込むよう構成されている。また、ラックセット領域Aに複数の検体ラックLが載置されている場合も、図示の如く、最も手前(Y軸負方向)の検体ラックLの手前側面を押して、最も奥(Y軸正方向)の検体ラックLを搬送領域Bに送り込む。
【0048】
また、ラックセット領域Aには、図示の如く、ラックセット領域AのY軸正方向の端とY軸負方向の端に一対のセンサA2が設けられている。センサA2は、透過型のフォトセンサ等からなる。センサA2は、ラックセット領域Aに検体ラックLが存在すると遮光状態となり、検体ラックLが存在しないと透過状態となるように構成されている。
【0049】
搬送領域Bには、検体ラックLの底面を支持する搬送路B1と、2つのラック横送り機構B2が設けられている。2つのラック横送り機構B2は、搬送路B1の下方に配置されており、搬送路B1上に配置された2つの検体ラックLを左右(X軸正方向および負方向)に独立して移動させる。なお、ラック横送り機構B2の構成については、追って、図4(b)と図5を参照して説明する。
【0050】
ここで、搬送領域Bに送り込まれた検体ラックLは、検体吸引位置52、53に搬送される前に、バーコードリーダ51により、検体容器TのバーコードラベルBL1と検体ラックLのバーコードラベルBL2の読み取り(以下、「先読み」という)が行われる。バーコードリーダ51による先読みは、図示の如く、検体ラックLが搬送領域B上の“先読み位置”の範囲にあるときに行われる。
【0051】
また、搬送領域Bには、図2で示したように、検体吸引位置52、53が設定されている。先読み位置で先読みが行われた検体ラックLは、検体吸引位置52または53の位置に、検体ラックLに保持されている検体容器Tが位置づけられるよう、左方向(X軸正方向)に搬送される。検体吸引位置52または53に位置づけられた検体容器TのバーコードラベルBL1は、バーコードリーダ51による読み取り(以下、「後読み」という)が行われた後、検体の吸引が行われる。
【0052】
なお、検体分注ユニット21、22により検体の吸引が行われているときに、後述の搬送中断原因が発生すると、検体ラックLは“搬送中断位置”まで移動されて、停止される。
【0053】
また、搬送領域Bには、図示の如く、センサB51〜B55が設置されている。センサB51〜55は、反射型のフォトセンサ等からなる。センサB51は、搬送領域Bの右端(X軸負方向の端)に位置づけられた検体ラックLを検出するように構成されている。センサB52は、検体ラックLが先読み位置内に搬送されたことを検出するように構成されている。センサB53、B54は、それぞれ、検体吸引位置52、53に検体ラックLが位置づけられたことを検出するように構成されている。センサB55は、検体ラックLが搬送中断位置に搬送されたことを検出するように構成されている。
【0054】
ラック収容領域Cには、載置された検体ラックLをY軸負方向へ搬送するラック送出機構C1が設けられている。ラック送出機構C1は、搬送領域Bの左端(X軸正方向の端)に配置された検体ラックLを、Y軸負方向に1ピッチ分(検体ラックLの短手方向の幅分)移動させ、検体ラックLを搬送領域Bからラック収容領域Cへ送り出すように構成されている。
【0055】
また、ラック収容領域Cには、図示の如く、検体ラックLの有無を検出するセンサC2が設けられている。センサC2は、反射型のフォトセンサ等からなり、ラック収容領域Cの搬送終端位置(Y軸負方向の端)まで送り出された検体ラックLを検出するように構成されている。
【0056】
同図(b)は、ラック横送り機構B2の構成を示す平面図である。2つのラック横送り機構B2は、Y軸方向に並べて配置されている。ラック横送り機構B2は、検体ラックLに対して係合可能な係合ユニットB3と、係合ユニットB3を左右(X軸正方向および負方向)に移動させる移動機構B4を備えている。
【0057】
移動機構B4は、搬送領域Bの両端部に配置された一対のプーリB41と、プーリB41に掛け渡されたベルトB42と、一方のプーリB41を回転させるステッピングモータB43と、ステッピングモータB43の回転数を検出するロータリーエンコーダB44とを備えている。
【0058】
係合ユニットB3は、移動機構B4のベルトB42に連結され、ステッピングモータB43が駆動されると、左右に移動するように構成されている。係合ユニットB3の移動量は、ステッピングモータB43の回転数としてロータリーエンコーダB44によって検出される。ステッピングモータB43は、ロータリーエンコーダB44の検出結果に基づいて動作制御される。また、係合ユニットB3の移動始点位置と移動終点位置とが、係合ユニットB3の駆動範囲内の右端(X軸負方向の端)と左端(X軸正方向の端)とに、それぞれ設定されている。さらに、移動始点位置と移動終点位置に配置された係合ユニットB3を検出する透過型のフォトセンサ等からなるセンサB55、B56が配置されている。
【0059】
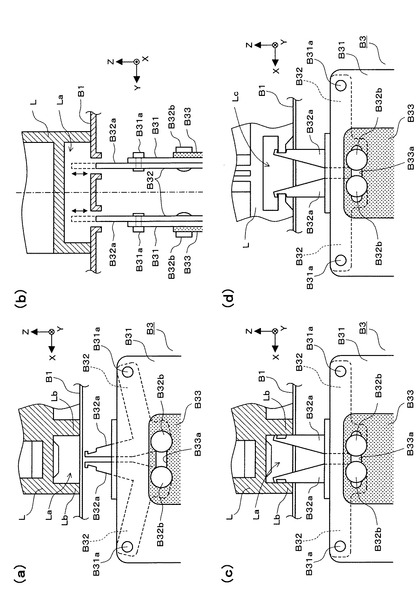
図5は、係合ユニットB3の要部を示す概略図である。同図(a)は、係合ユニットB3が検体ラックLに係合していない状態を示す係合ユニットB3の正面図であり、同図(b)は、係合ユニットB3の側面図であり、同図(c)、(d)は、係合ユニットB3が、検体ラックLに係合している状態を示す係合ユニットB3の正面図である。
【0060】
同図(a)を参照して、係合ユニットB3は、基体B31と、一対の係合部材B32と、作用部材B33とを備えている。また、係合ユニットB3は、作用部材B33を昇降させるための図示しないエアシリンダB34(図7参照)を備えている。
【0061】
基体B31には、ガイド部材(図示せず)が取り付けられており、かかるガイド部材が、搬送路B1の下方においてX軸方向に沿って配置されたガイドレール(図示せず)に摺動自在に係合している。このガイドレールにより、基体B31はX軸正方向および負方向に移動自在に支持されている。
【0062】
一対の係合部材B32は、図示の如く、ボルトおよびナットからなる取付具B31aによって、Y軸回りに回動自在となるよう基体B31の上部に取り付けられている。係合部材B32の上部には、係合爪B32aが形成されており、下端には、係合ローラB32bが設けられている。基体B31には、係合部材B32が取付具B31aを中心として回動するときの係合ローラB32bの回動ラインに沿って、係合ローラB32bの回動範囲を規制するための規制孔(図示せず)が形成されている。係合ローラB32bは、この規制孔に移動可能に係合されている。これにより、係合部材B32は、取付具B31aを中心としてY軸回りに所定範囲に限り回動可能となっている。
【0063】
作用部材B33の上部には、一対の係合ローラB32bが係合する左右方向に長い矩形状の係合孔B33aが形成されている。作用部材B33がZ軸方向に駆動されると、係合孔B33aに係合された係合ローラB32bを介して、一対の係合部材B32が取付具B31aを中心としてY軸周りに回動する。同図(a)に示す如く、一対の係合部材B32が下方向(Z軸負方向)に回動している状態では、係合爪B32aは、搬送路B1より下方に位置しており、検体ラックLには係合しない。
【0064】
エアシリンダB34には図示しないコンプレッサから圧縮空気が供給される。また、エアシリンダB34は、圧縮空気の供給によって上下方向に昇降運動するロッドを備えている。エアシリンダB34のロッドの上端には、作用部材B33が固定されている。エアシリンダB34のロッドが上下に昇降すると、作用部材B33が共に上下に昇降し、これに伴い一対の係合部材B32が上下に回動する。
【0065】
同図(b)を参照して、上記の如く、係合部材B32の回動により、係合爪B32aが、図示の如く、搬送路B1に形成された溝を通って搬送路B1上に突出する状態と突出しない状態が切り替えられる。
【0066】
同図(c)を参照して、係合部材B32が上方向(Z軸正方向)に回動すると、係合爪B32aが搬送路B1上に突出すると共に、検体ラックLの底部に形成された凹部Laに進入し、一対の係合爪32aが互いに離反する。これにより、係合爪32aは、図示の如く、凹部LaにおけるX軸正方向および負方向の両側の璧部Lbに当接する。こうして、一対の係合部材B32が検体ラックLに係合し、検体ラックLが搬送可能な状態となる。
【0067】
なお、同図(d)を参照して、図3(c)に示した検体ラックLが用いられる場合も、係合爪B32aが搬送路B1上に突出すると共に、検体ラックLの底部に形成された凹部Lcに侵入し、一対の係合爪32aが互いに離反する。この場合、係合爪B32aは、図示の如く、凹部Lcに形成された凸状の璧部に係合する。これにより、図3(b)に示した検体ラックLと同様、図3(c)に示した検体ラックLも搬送可能な状態となる。
【0068】
このような係合ユニットB3が、搬送路B1の下方に、図4(b)に示す如く、Y軸方向に向かい合うように配置されている。これにより、搬送領域Bにおいて、2つの検体ラックLが独立して駆動される。
【0069】
このようにラック横送り機構B2が構成されると、検体ラックLの底面の凹部Laが係合爪B32aにより支持されながら、検体ラックLが搬送路B1上を搬送されることとなる。また、後述の搬送中断原因が発生すると、検体ラックLは搬送領域B上で停止されるが、この場合も、検体ラックLの底面の凹部Laが係合爪B32aにより支持された状態が維持される。さらに、検体ラックLが停止される場合、ステッピングモータB43に励磁がかけ続けられる。これにより、検体ラックLの位置ずれが抑制される。
【0070】
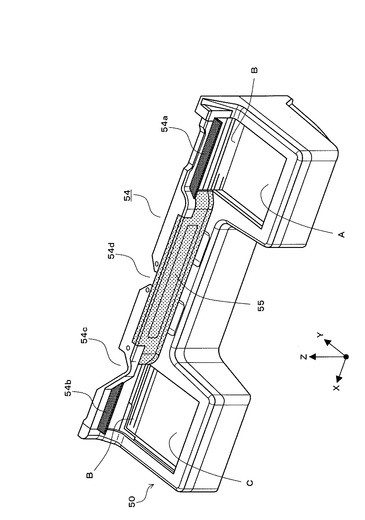
図6は、搬送ユニット50の斜視図である。
【0071】
搬送領域Bの中央付近の上部(Z軸正方向)には、屋根54が設置されている。屋根54の右端(X軸負方向の端)部分と、屋根54の左端(X軸正方向の端)には、図示の如く、それぞれ、鍔部54a、54bが設けられている。また、屋根54には、図示の如く、開口54c、54dが形成されている。検体分注ユニット21、22は、それぞれ、開口54c、54dを介して、検体吸引位置52、53に位置づけられた検体容器Tの検体を吸引する。また、搬送領域Bの手前(Y軸負方向)には、図示の如く、蓋部55が取り外し可能に設置されている。
【0072】
このように搬送ユニット50が構成されると、搬送領域B内にある検体ラックLと検体容器Tは、開口54a、54bの領域を除き、上側が塞がれた状態になっている。これにより、搬送領域B内にある検体容器Tに上方から異物が混入されることや、操作者が検体ラックLと検体容器Tに接触することが抑制される。また、このように搬送ユニット50が構成されると、操作者が、搬送領域Bの中央付近(蓋部55により覆われた領域)にある検体ラックLと検体容器Tに触れることができなくなる。これにより、操作者が検体ラックLと検体容器Tに接触することが抑制される。
【0073】
なお、図4で示した先読み位置は、蓋部55に覆われた範囲内にある。すなわち、検体ラックLが先読み位置に位置づけられると、検体ラックLは、蓋部55内に完全に収容されることとなる。また、図4で示した搬送中断位置も、蓋部55に覆われた範囲内にある。すなわち、検体ラックLの検体が吸引されるときに、検体ラックLの左端が蓋部55からはみ出している場合でも、後述の搬送中断原因が発生すると、検体ラックLは、蓋部55内にある搬送中断位置に位置づけられる。これにより、測定動作中断中に、操作者が検体ラックLと検体容器Tに接触することが、さらに抑制される。
【0074】
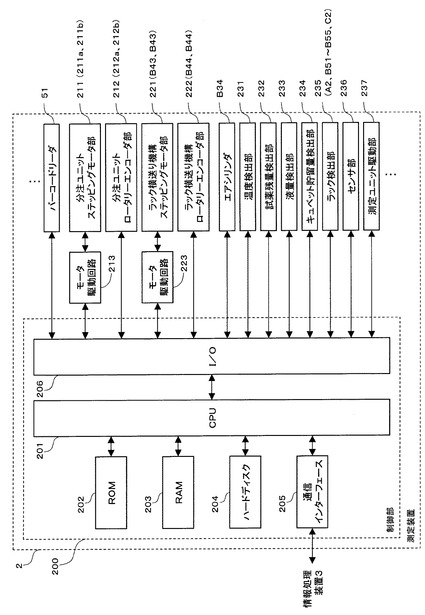
図7は、測定装置2の回路構成を示す図である。
【0075】
測定装置2は、制御部200と、バーコードリーダ51と、分注ユニットステッピングモータ部211と、分注ユニットロータリーエンコーダ部212と、モータ駆動回路213と、ラック横送り機構ステッピングモータ部221と、ラック横送り機構ロータリーエンコーダ部222と、モータ駆動回路223と、エアシリンダB34と、温度検出部231と、試薬残量検出部232と、液量検出部233と、キュベット貯留量検出部234と、ラック検出部235と、センサ部236と、測定ユニット駆動部237を含んでいる。
【0076】
また、制御部200は、CPU201と、ROM202と、RAM203と、ハードディスク204と、通信インターフェース205と、I/Oインターフェース206を有する。
【0077】
CPU201は、ROM202に記憶されているコンピュータプログラムおよびRAM203にロードされたコンピュータプログラムを実行する。RAM203は、ROM202およびハードディスク204に記録されているコンピュータプログラムの読み出しに用いられる。また、RAM203は、これらのコンピュータプログラムを実行するときに、CPU201の作業領域としても利用される。ハードディスク204には、オペレーティングシステムおよびアプリケーションプログラムなど、CPU201に実行させるための種々のコンピュータプログラムおよびコンピュータプログラムの実行に用いるデータがインストールされている。また、通信インターフェース205により、情報処理装置3に対してデータの送受信が可能となる。
【0078】
また、CPU201は、I/Oインターフェース206を介して、バーコードリーダ51と、分注ユニットロータリーエンコーダ部212と、モータ駆動回路213と、ラック横送り機構ロータリーエンコーダ部222と、モータ駆動回路223と、エアシリンダB34と、温度検出部231と、試薬残量検出部232と、液量検出部233と、キュベット貯留量検出部234と、ラック検出部235と、センサ部236と、測定ユニット駆動部237に接続されている。
【0079】
分注ユニットステッピングモータ部211は、検体分注ユニット21の支持部21a、検体分注ユニット22の支持部22aをそれぞれ独立して回転駆動させるステッピングモータ211a、211bで構成されている。分注ユニットロータリーエンコーダ部212は、検体分注ユニット21、22のそれぞれのステッピングモータ211a、211bに配されたロータリーエンコーダ212a、212bで構成されている。モータ駆動回路213は、CPU201の制御により、分注ユニットステッピングモータ部211に含まれるステッピングモータ211a、211bを駆動させる。
【0080】
ラック横送り機構ステッピングモータ部221は、2つのラック横送り機構B2のステッピングモータB43で構成されている。ラック横送り機構ロータリーエンコーダ部222は、2つのラック横送り機構B2のロータリーエンコーダB44で構成されている。モータ駆動回路223は、CPU201の制御により、ラック横送り機構ステッピングモータ部221に含まれる2つのステッピングモータB43を独立して駆動させる。
【0081】
なお、分注ユニットロータリーエンコーダ部212とラック横送り機構ロータリーエンコーダ部222を構成する各ロータリーエンコーダには、インクリメンタル方式のものが用いられている。このロータリーエンコーダは、ステッピングモータの回転変位量に応じたパルス信号を出力するように構成されており、ロータリーエンコーダから出力されたパルス数をカウントすることで、ステッピングモータの回転量を検出することができる。
【0082】
温度検出部231は、温度センサを備え、加温テーブル16の温度を検出する。試薬残量検出部232は、液面検知センサを備え、試薬テーブル11、12に配置された試薬容器内の試薬の残量を検出する。液量検出部233は、複数の液面検知センサを備え、検体分注ユニット21、22と試薬分注ユニット23〜25の洗浄に用いられる洗浄液が収容されている洗浄液タンクの残量を検出し、廃棄された洗浄液を収容する廃液タンクの廃液量を検出する。キュベット貯留量検出部234は、キュベット貯留量センサを備え、キュベット供給ユニット33に収容されているキュベットの残量を検出する。ラック検出部235は、搬送ユニット50に設置されているセンサA2、B51〜B55、C2で構成されている。センサ部236は、本体カバー29が開放されていることを検出するフォトセンサを含んでいる。測定ユニット駆動部237は、検体分注ユニット21、22と試薬分注ユニット23〜25の分注動作が行われるよう、これら分注ユニットに圧力を供給する空圧源と、各テーブル(試薬テーブル11、12、キュベットテーブル15、加温テーブル16)を駆動させる駆動部を含んでいる。
【0083】
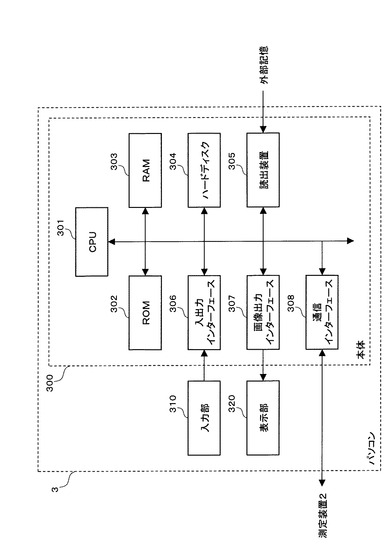
図8は、情報処理装置3の回路構成を示す図である。
【0084】
情報処理装置3は、パーソナルコンピュータからなっており、本体300と、入力部310と、表示部320から構成されている。本体300は、CPU301と、ROM302と、RAM303と、ハードディスク304と、読み出し装置305と、入出力インターフェース306と、画像出力インターフェース307と、通信インターフェース308を有する。
【0085】
CPU301は、ROM302に記憶されているコンピュータプログラムおよびRAM303にロードされたコンピュータプログラムを実行する。RAM303は、ROM302およびハードディスク304に記録されているコンピュータプログラムの読み出しに用いられる。また、RAM303は、これらのコンピュータプログラムを実行するときに、CPU301の作業領域としても利用される。
【0086】
ハードディスク304には、オペレーティングシステムおよびアプリケーションプログラムなど、CPU301に実行させるための種々のコンピュータプログラムおよびコンピュータプログラムの実行に用いるデータがインストールされている。すなわち、ハードディスク304には、測定装置2の試薬状態を受信し、試薬の残量などをメッセージとして表示部309上に表示等を行う表示プログラムや、試薬の交換または追加の操作指示に従って測定装置2を操作するための操作プログラムがインストールされている。
【0087】
読出装置305は、CDドライブまたはDVDドライブ等によって構成されており、記録媒体に記録されたコンピュータプログラムおよびデータを読み出すことができる。入出力インターフェース306には、マウスやキーボードからなる入力部310が接続されており、操作者が入力部310を使用することにより、情報処理装置3にデータが入力される。画像出力インターフェース307は、ディスプレイ等で構成された表示部320に接続されており、画像データに応じた映像信号を、表示部320に出力する。表示部320は、入力された映像信号をもとに、画像を表示する。また、通信インターフェース308により、測定装置2に対してデータの送受信が可能となる。
【0088】
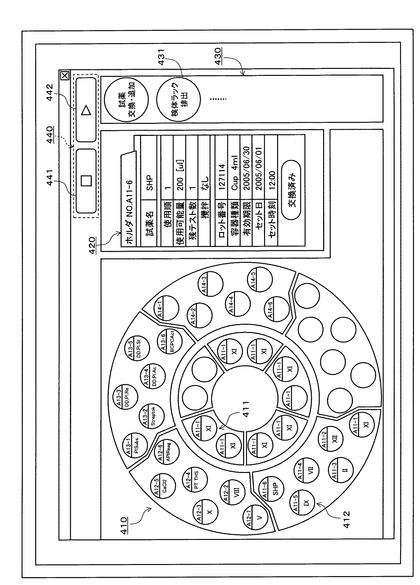
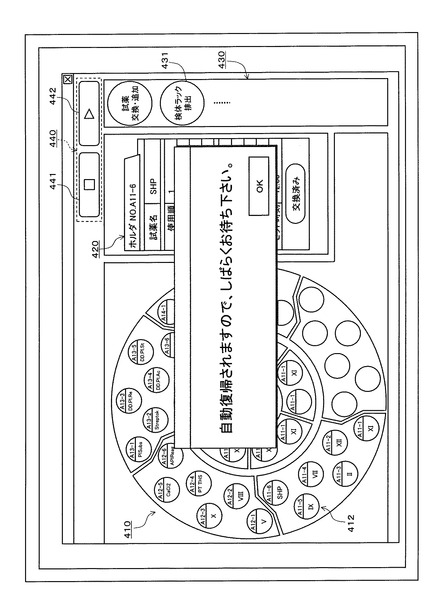
図9は、情報処理装置3の表示部320に表示される試薬情報画面の例示図である。試薬情報画面には、配置表示領域410と、詳細情報表示領域420と、操作指示表示領域430と、操作決定表示領域440が含まれている。
【0089】
配置表示領域410には、試薬テーブル11、12に配置されている容器ラック13、14の位置と、これら容器ラックに収容されている試薬容器の配置状態が表示される。
【0090】
配置表示領域410中の試薬マーク411または412が選択されると、選択された選択マーク位置に保持されている試薬容器の内容物に関する詳細情報が詳細情報表示領域420に表示される。
【0091】
操作指示表示領域430は、検体ラック排出ボタン431を含む複数の指示種別ボタンを有している。操作者により、指示種別ボタンが押下されると、指示種別ボタンに該当する操作が実行される。
【0092】
測定指示表示領域440は、測定中断ボタン441と測定開始ボタン442を有している。操作者により、測定中断ボタン441が押下されると、測定中断処理が行われる。また、測定中断時に、操作者により、測定開始ボタン442が押下されると、測定再開処理が行われる。なお、測定開始ボタン442は、実行可能である場合に有効表示されており、実行不可能である場合に測定開始ボタン442が押下されると、実行不可能である旨が操作者に通知されるよう画面上にメッセージが表示される。
【0093】
次に、検体処理装置の処理動作について説明する。以下の処理動作は、測定装置2と情報処理装置3との間でデータ通信を行いながら、情報処理装置3の制御のもとで行われる。
【0094】
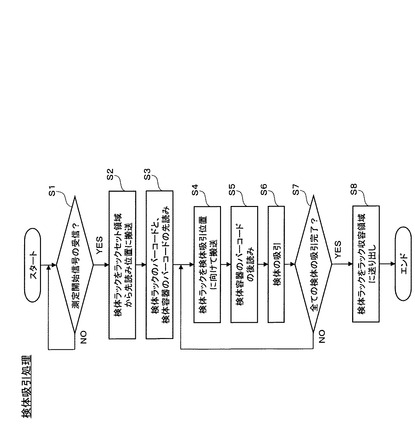
図10は、本実施の形態に係る検体吸引処理の処理フローを示す図である。なお、以下に示す処理フローにおいて、検体ラックLの搬送位置は、ラック横送り機構ロータリーエンコーダ部222からの出力と、ラック検出部235からの出力をもとに、把握されている。
【0095】
本実施の形態では、操作者が情報処理装置3を介して測定開始の指示を入力することにより、測定装置2の測定が開始される。測定装置2のCPU201は、情報処理装置3から測定開始信号を受信すると(S1:YES)、検体ラックLをラックセット領域Aから先読み位置に搬送する(S2)。先読み位置では、検体ラックLのバーコードラベルBL2と、この検体ラックLに保持されている検体容器TのバーコードラベルBL1が、バーコードリーダ51により先読みされる(S3)。
【0096】
先読み位置でのバーコードの読み取りが終了した検体ラックLは、検体吸引位置52または53に搬送される(S4)。検体吸引位置52または53に検体容器Tが位置づけられると、検体容器TのバーコードラベルBL1が、バーコードリーダ51により後読みされる(S5)。続いて、バーコードの読み取りが行われた検体容器Tの検体は、検体吸引位置52または53で、検体分注ユニット21または22により吸引される(S6)。
【0097】
検体ラックLに保持されている全ての検体容器Tの検体が吸引されると(S7:YES)、検体ラックLはラック収容領域Cに送り出され(S8)、この検体ラックLについての検体吸引処理が終了する。検体ラックLに保持されている全ての検体容器Tの検体が吸引されていないと(S7:NO)、この検体ラックLに保持されている検体容器Tの検体が全て吸引されるまで、S4〜S6が繰り返される。
【0098】
なお、検体ラックLが検体吸引位置52または53に位置づけられたとき、後行の検体ラックLがあるときは、後行の検体ラックLについて、S2以降の動作が開始される。この場合、先行の検体ラックLについて後読みが優先的に行われながら、後行の検体ラックLについても先読みが行われるよう、バーコードリーダ51が適宜X軸正方向および負方向に移動される。
【0099】
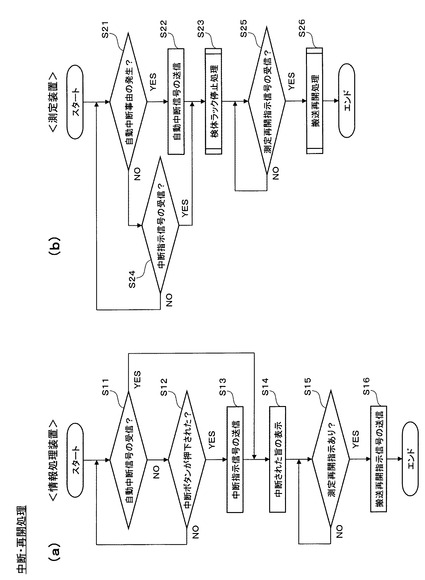
図11は、測定装置2と情報処理装置3で行われる搬送動作の中断・再開処理の処理フローを示す図である。
【0100】
本実施の形態では、操作者が図9に示した測定中断ボタン441を押下することによって中断指示信号が情報処理装置3から測定装置2に送信されると、検体ラックの搬送動作が中断される。また、所定の自動中断事由が検出された場合、すなわち、キュベット貯留量検出部234によりキュベットの不足が検出された場合、液量検出部233により廃液タンクが一杯であることが検出された場合、液量検出部233により洗浄液の不足が検出された場合、試薬残量検出部232により試薬の不足が検出された場合、ラック検出部235のセンサC2によりラック収容領域Cに検体ラックLが一杯になっていることが検出された場合にも、検体ラックの搬送動作が中断される。
【0101】
図11(a)を参照して、情報処理装置3のCPU301は、測定装置2から、上記自動中断事由を検出したことを示す信号(自動中断信号)を受信すると(S11:YES)、測定が中断された旨の表示を情報処理装置3の表示部320に表示させる(S14)。また、情報処理装置3のCPU301は、操作者により測定中断ボタン441が押されると(S12:YES)、中断指示信号を測定装置2に送信する(S13)。その後、CPU301は、測定が中断された旨の表示を情報処理装置3の表示部320に表示させる(S14)。
【0102】
図12は、情報処理装置3の表示部320に表示される測定中断メッセージの例示図であり、“自動復帰されますので、しばらくお待ち下さい。”と表示されている。なお、表示メッセージは、この他、“検体ラックを移動させる必要はありません。測定が再開されると、検体ラックの搬送は自動的に復帰されます。”等でも良い。これにより、操作者は、検体ラックLをラックセット領域Aにセットし直す必要がないことが分かる。
【0103】
図11(b)を参照して、測定装置2のCPU201は、上記の自動中断事由を検出すると(S21:YES)、自動中断信号を情報処理装置3に送信し(S22)、“検体ラック停止処理”により検体ラックLを停止させる(S23)。また、測定装置2のCPU201は、情報処理装置3から中断指示信号を受信すると(S24:YES)、“検体ラック停止処理”により検体ラックLを停止させる(S23)。なお、“検体ラック停止処理”については、追って図16を参照して説明する。
【0104】
図11(a)を参照して、操作者が、情報処理装置3を介して測定装置2による測定が再開されるよう指示すると(S15:YES)、情報処理装置3のCPU301は、測定再開指示信号を測定装置2に送信し(S16)、処理を終了する。
【0105】
図11(b)を参照して、測定装置2のCPU201は、情報処理装置3から測定再開指示信号を受信すると(S25:YES)、“搬送再開処理”により検体ラックLの搬送を再開させ(S26)、処理を終了する。なお、“搬送再開処理”については、追って図17を参照して説明する。
【0106】
なお、検体ラックが停止された後、検体ラックLの搬送が再開されるまでの間に、検体ラックLの位置がずれる惧れがある場合には、この間に検体ラックLの位置ずれが生じていないか判定されるようにしても良い。
【0107】
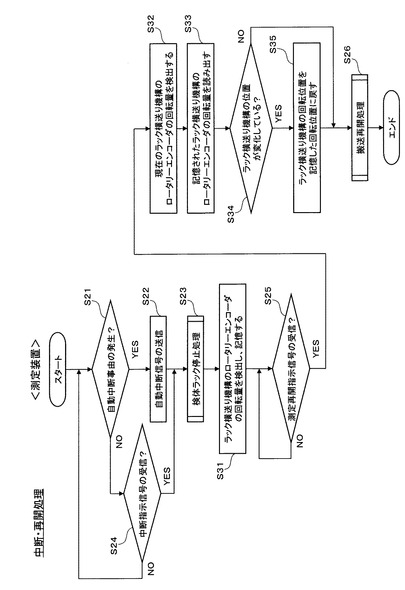
図13は、この変更例による、測定装置2のCPU201による検体ラックLの搬送の中断・再開処理の処理フローを示す図である。以下、図11(a)の処理フローと異なる処理ステップについてのみ説明する。
【0108】
S31では、“検体ラック停止処理”によって停止された検体ラックLの搬送領域B上での位置が記憶される。すなわち、この検体ラックLを搬送するラック横送り機構B2のロータリーエンコーダB44から検出される回転量が、情報処理装置3のRAM303またはハードディスク304に記憶される。
【0109】
測定再開指示がされると(S25:YES)、現在のラック横送り機構B2のロータリーエンコーダB44の回転量が検出され(S32)、S31で記憶された回転量が読み出される(S33)。これら2つの回転量の値が比較され、ラック横送り機構B2の位置が変化していると判定されると(S34:YES)、ラック横送り機構B2の位置が、S31で記憶された回転量に基づき戻される(S35)。
【0110】
こうすると、万一ラック横送り機構B2の位置が、検体ラックLの停止直後から変化した場合でも、“搬送再開処理”により検体ラックLの搬送が再開される前に、適正な位置に位置づけられるため、検体ラックLの搬送が円滑に再開され得る。
【0111】
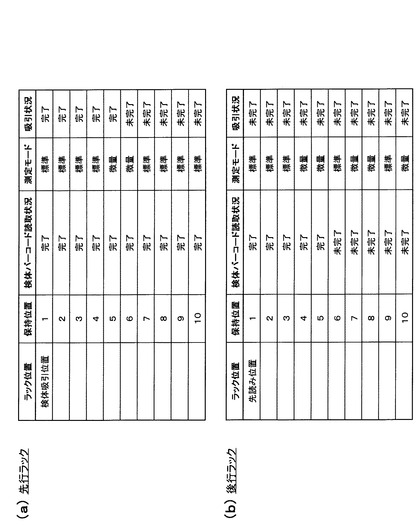
図14は、先行ラックと後行ラックの搬送制御リストを示す図である。同図(a)、(b)は、それぞれ、先行ラックと後行ラックの搬送制御リストを示す図である。なお、先行ラックとは、搬送領域Bにおいて搬送されている2つの検体ラックLのうち、下流(X軸正方向)に位置する検体ラックLのことであり、後行ラックとは、搬送領域Bにおいて搬送されている2つの検体ラックLのうち、上流(X軸負方向)に位置する検体ラックLのことである。
【0112】
搬送制御リストの項目には、同図(a)、(b)に示す如く、ラック位置、保持位置、検体バーコード読取状況、測定モード、吸引状況などが含まれる。搬送制御リストは、測定装置2のRAM203またはハードディスク204に記憶されている。この搬送制御リストによって、先読み後の検体ラックLの搬送動作が制御される。
【0113】
なお、搬送制御リスト中の“測定モード”の項目は、先読み位置で読み取られた検体ラックLのバーコードラベルBL2の情報をもとに、後述するジョブリストから取得される。ジョブリストは、各検体の測定モードを含む測定オーダ情報、測定状況情報、測定結果などを保持しており、測定が行われる新たな検体容器Tのジョブリストへの登録(以下、「オーダ登録」という)が行われる場合や、測定が開始された場合や、測定結果が得られた場合などに更新される。なお、図15に示すように、ジョブリストには、ラック番号と検体容器Tの保持位置(ラック番号−位置)に対応づけて、測定モードが保持されている。先読み位置で検体ラックLのバーコードラベルBL2が読み取られると、読み取られたバーコードラベルBL2に対応するラック番号の各保持位置に対応づけられた測定モードが、ジョブリストから、後行ラックの“測定モード”の項目に転記される。搬送制御リスト中の“吸引状況”の項目は、図10のS6で検体の吸引が行われることによって「未完了」から「完了」に更新される。
【0114】
図14(a)を参照して、“ラック位置”の項目から、先行ラックが検体吸引位置52に位置づけられていることが分かる。また、“検体バーコード読取状況”の項目から、全ての保持位置についてのバーコードリーダ51による先読みが完了していることが分かる。また、“測定モード”の項目から、保持位置1〜4、7〜10の検体容器Tについては標準測定が行われ、保持位置5、6の検体容器Tについては微量測定が行われることが分かる。また、“吸引状況”の項目から、保持位置1〜5の検体容器Tについては、検体の吸引が完了しており、保持位置6〜10の検体容器Tについては、検体の吸引は完了していないことが分かる。
【0115】
同図(b)を参照して、“ラック位置”の項目から、後行ラックが先読み位置に位置づけられていることが分かる。また、“検体バーコード読取状況”の項目から、保持位置1〜5についてはバーコードリーダ51による先読みが完了しており、保持位置6〜10についてはバーコードリーダ51による先読みが完了していないことが分かる。また、“測定モード”の項目から、後行ラックの保持位置1〜3、6、9の検体容器Tについては標準測定が行われ、保持位置4、5、7、8、10の検体容器Tについては微量測定が行われることが分かる。また、“吸引状況”の項目から、全ての保持位置について吸引が完了していないことが分かる。
【0116】
先行ラックがラック収容領域Cに搬送され、先読み位置に位置づけられていた後行ラックが検体吸引位置52または53に位置づけられると、先行ラックの搬送制御リストに後行ラックの搬送制御リストが上書きされ、後行ラックの搬送制御リストが初期化される。また、先読み位置に新たな検体ラックLが位置づけられると、この検体ラックLについて、後行ラックの搬送制御リストが作成される。
【0117】
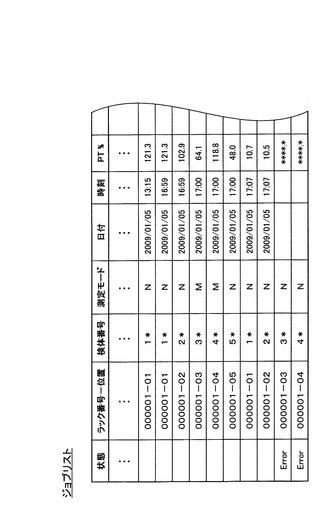
図15は、ジョブリストを示す図である。
【0118】
図示の如く、ジョブリストには、オーダ登録された検体容器Tについての測定状況、測定オーダ情報、測定結果などが保持されている。なお、ジョブリストは、情報処理装置3のハードディスク304に記憶されている。
【0119】
ジョブリストの項目には、状態、ラック番号−位置、検体番号、測定モード、日付、時刻、PT%(測定結果)などが含まれる。“状態”の項目には、検体に対する測定状況が書き込まれる。オーダ登録されたのみで検体の測定が開始されていなければ、“状態”の項目は“Pending”となり、後述のように、検体ラックLが排出されると“Error”となり、検体に対する測定が終了すると“状態”の項目がブランクとなる。“ラック番号−位置”の項目は、検体ラックLを識別するための番号と、検体容器Tの保持位置を示す。各ラック番号には、検体ラックLのバーコードラベルBL2に関する情報が対応づけられている。“検体番号”の項目は、検体容器Tを識別するための番号を示す。各“検体番号”には、検体容器TのバーコードラベルBL1に関する情報が対応づけられている。“日付”と“時刻”の項目は、検体が測定装置2に取り込まれた日時を示す。“PT%”の項目には、測定が正常に終了すると測定結果が書き込まれ、測定が正常に終了していないと“****.*”(マスク)が書き込まれる。なお、“PT%”とは測定項目の一種であり、ジョブリストには、この他にも測定項目が含まれている。
【0120】
図16は、図11(b)に示す中断・再開処理における“検体ラック停止処理”の処理フローを示す図である。
【0121】
搬送中断事由の発生時に、検体ラックLの全ての検体容器Tついて検体の吸引が終了し、ラック収容領域Cに向けて搬送中の検体ラックLがあるとき(S101:YES)、かかる検体ラックLは、ラック収容領域Cまで搬送される(S102)。
【0122】
検体吸引位置52または53において、検体の吸引が行われている検体ラックLがあるとき(S103:YES)、検体分注ユニット21または22のアームが上昇される。検体分注ユニット21または22のアームの上昇が完了すると(S104:YES)、検体ラックLは、図4で示した搬送中断位置に移動され、その位置で停止される(S105)。なお、検体ラックLが搬送中断位置に移動されたことはセンサB55により検出することができる。
【0123】
また、検体吸引位置52または53において、検体の吸引が行われている検体ラックLがない場合(S103:NO)、先読み位置と、検体吸引位置52または53との間に検体ラックLがあると(S106:YES)、かかる検体ラックLは、搬送中断位置に移動され、その位置で停止される(S107)。すなわち、検体ラックLの先読みが終了して、検体吸引位置52または53に向けて搬送中の検体ラックLは、搬送中断位置に位置づけられる。
【0124】
先読み位置に先読み中の検体ラックLがあるとき(S108:YES)、現在先読みが行われている検体容器Tまたは検体ラックLのバーコード読み取りが完了するまで待機される。先読み中の検体容器Tまたは検体ラックLのバーコード読み取りが完了すると(S109:YES)、検体ラックLはその位置で停止される(S110)。
【0125】
また、先読み位置に先読み中の検体ラックLがない場合(S108:NO)、ラックセット領域Aにおいてラック送込機構A1により送り込み中の検体ラックL、または搬送領域Bにおいて先読み位置まで搬送中の検体ラックLがあると(S111:YES)、かかる検体ラックLは、先読み位置まで搬送されて、先読み位置で停止される(S112)。なお、検体ラックLが先読み位置に搬送されたことはセンサB52により検出することができる。このようにして、“検体ラック停止処理”が終了する。
【0126】
なお、S105、S107、S110、S112において検体ラックLが停止された後、搬送動作が再開されるまでの間は、図5で示したラック横送り機構B2の係合爪B32aが、検体ラックLに係合した状態に維持される。また、かかる停止期間中は、検体ラックLの位置ずれが抑制されるよう、ステッピングモータB43に励磁がかけ続けられる。これにより、不具合なく検体ラックLの搬送動作を再開させることが可能となる。
【0127】
図17は、図11に示す中断・再開処理における“搬送再開処理”の処理フローを示す図である。
【0128】
S201では、搬送領域Bの搬送路B1上に停止中の検体ラックがあるかが判定される。搬送路B1上に停止中の検体ラックがあると(S201:YES)、搬送中断位置に検体ラックLがあるかが判定される(S202)。搬送路B1上に停止中の検体ラックがないと(S201:NO)、処理フローが終了する。
【0129】
搬送中断位置に検体ラックLがあると(S202:YES)、かかる検体ラックLに検体の吸引が未完了の検体容器Tがあるかが判定される(S203)。搬送中断位置に検体ラックLがないと(S202:NO)、S206に処理が進められる。
【0130】
検体ラックLに検体の吸引が未完了の検体容器Tがあると(S203:YES)、搬送制御リストが参照されることにより、吸引が未完了である検体容器Tの保持位置に応じて、且つ、かかる検体容器Tの検体が標準測定されるか微量測定されるかに基づき、検体ラックLが検体吸引位置52または53に移動される(S204)。検体ラックLに検体の吸引が未完了の検体容器Tがないと(S203:NO)、かかる検体ラックLは、ラック収容領域Cに送り出される(S205)。このように、S204では、既に吸引が完了した検体容器Tについては吸引を行わず、吸引が未完了の検体容器Tに対してのみ吸引が行われる。
【0131】
先読み位置に検体ラックLがあると(S206:YES)、バーコードリーダ51によるバーコードの読み取りが未完了の検体容器Tがあるかが判定される(S207)。先読み位置に検体ラックLがないと(S206:NO)、処理フローが終了する。
【0132】
バーコードリーダ51によるバーコードの読み取りが未完了の検体容器Tがあると(S207:YES)、搬送制御リストが参照されることにより、バーコードの読み取りが未完了である検体容器Tのバーコード読み取りが行われる。なお、検体ラックLの読み取りが未完了である場合も、検体ラックLのバーコード読み取りが行われる。かかる読み取り作業が完了した後、検体吸引位置52または53に向けて搬送される(S208)。バーコードリーダ51によるバーコードの読み取りが未完了の検体容器Tがないと(S207:NO)、検体吸引位置52または53に向けて検体ラックLが搬送される(S209)。このように、S208では、既に読み取りが完了したバーコードラベルについては読み取りを行わず、読み取りが未完了のバーコードラベルに対してのみ読み取りが行われる。
【0133】
以上のようにして、“搬送再開処理”が終了する。
【0134】
図18(a)は、測定装置2と情報処理装置3で行われる検体ラックLの排出処理の処理フローを示す図である。
【0135】
本実施の形態では、操作者が図9に示した検体ラック排出ボタン431を押下することによって排出指示信号が情報処理装置3から測定装置2に送信されると、搬送中の検体ラックLがラック収容領域Cに排出される。また、所定の自動排出事由が検出された場合、すなわち、検体分注ユニット21、22と試薬分注ユニット23〜25の動作異常が検出された場合、測定ユニット駆動部237の空圧源からの圧力供給異常が検出された場合、各テーブル(試薬テーブル11、12、キュベットテーブル15、加温テーブル16)の動作異常が検出された場合、センサ部236により本体カバー29が開いていることが検出された場合、温度検出部231により加温テーブル16の温度異常が検出された場合にも、搬送中の検体ラックLがラック収容領域Cに排出される。
【0136】
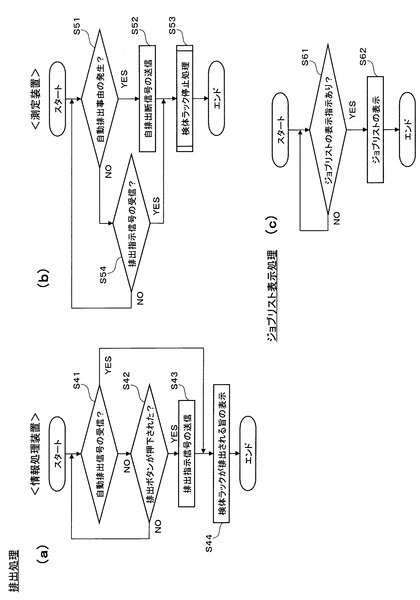
図18(a)を参照して、情報処理装置3のCPU301は、測定装置2から、上記自動排出事由を検出したことを示す信号(自動排出信号)を受信すると(S41:YES)、検体ラックLが排出される旨の表示を情報処理装置3の表示部320に表示させる(S44)。また、情報処理装置3のCPU301は、操作者により検体ラック排出ボタン431が押されると(S42:YES)、排出指示信号を測定装置2に送信する(S43)。その後、CPU301は、検体ラックLが排出される旨の表示を情報処理装置3の表示部320に表示させ(S44)、処理を終了する。
【0137】
図18(b)を参照して、測定装置2のCPU201は、上記の自動排出事由を検出すると(S51:YES)、自動排出信号を情報処理装置3に送信し(S52)、“検体ラック排出処理”により検体ラックLを排出する(S53)。また、測定装置2のCPU201は、情報処理装置3から排出指示信号を受信すると(S54:YES)、“検体ラック排出処理”により検体ラックLを排出する(S52)。なお、“検体ラック排出処理”については、図19を参照して説明する。
【0138】
図19は、図18(a)に示す排出処理における“検体ラック排出処理”の処理フローを示す図である。
【0139】
S301では、検体容器Tの検体の吸引が終了し、搬送領域Bからラック収容領域Cに送り出し中の検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S301:YES)、この検体ラックLはラック収容領域Cに搬出される(S302)。かかる検体ラックLがないと判定されると(S301:NO)、S303に処理が進められる。
【0140】
S303では、検体吸引位置52または53において、検体の吸引が行われている検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S303:YES)、検体分注ユニット21または22のアームが上昇される(S304)。検体分注ユニット21または22のアームの上昇が完了すると(S304:YES)、検体の吸引が行われていた検体ラックLが、搬送領域Bに沿って左方向(X軸正方向)に搬送され、ラック収容領域Cに搬出される(S305)。また、吸引中の検体ラックLがないと判定されると(S303:NO)、S306に処理が進められる。
【0141】
S306では、先読みが終了した後、先読み位置と、検体吸引位置52または53の間に位置づけられた検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S306:YES)、かかる検体ラックLが、搬送領域Bに沿って左(X軸正方向)に搬送され、ラック収容領域Cに搬出される(S307)。また、先読み位置と、検体吸引位置52または53の間に検体ラックがないと判定されると(S306:NO)、S308に処理が進められる。
【0142】
S308では、先読み中の検体ラックLがあるかが判定される。先読み中の検体ラックLがあると判定されると(S308:YES)、先読み中の検体ラックが、先読み動作が終了する前に搬送領域Bに沿って左方向に搬送され、ラック収容領域Cに送り出される(S309)。また、先読み中の検体ラックLがないと判定されると(S308:NO)、S310に処理が進められる。
【0143】
S310では、搬送領域B上を先読み位置に向けて搬送されている検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S310:YES)、かかる検体ラックLは、バーコードの読み取り、および、検体の吸引が行われることなく、ラック収容領域Cに搬出される(S311)。かかる検体ラックLがないと判定されると(S310:NO)、S312に処理が進められる。なお、ラックセット領域Aから搬送領域Bの右端に検体ラックLが送り込まれてから当該検体ラックLが先読み位置に向けて搬送開始されるまでの状態の場合も、S310において、YESと判定される。
【0144】
S312では、ラックセット領域A上を搬送領域Bの右端に向けて送り込み中の検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S312:YES)、かかる検体ラックLは、その位置で停止され(S313)、“検体ラック排出処理”が終了する。また、かかる検体ラックLがないと判定されると(S312:NO)、“検体ラック排出処理”が終了する。
【0145】
以上の処理により強制排出された検体ラックLに保持された検体容器Tのうち、検体の吸引が行われた検体容器Tについては、図15で示したジョブリストの“状態”の項目が、Pendingからブランクに書き替えられる。また、先読みは行われたが検体の吸引が行われずに強制排出された検体容器Tについては、図15で示したジョブリストの“状態”の項目はErrorとなり、測定項目がマスクとされる。
【0146】
図18(c)は、ジョブリスト表示処理の処理フローを示す図である。
【0147】
操作者が、情報処理装置3を介してジョブリストの表示を指示すると(S61:YES)、情報処理装置3の表示部320にジョブリストを示す画面が表示される(S62)。
【0148】
以上、本実施の形態によれば、検体ラックLの搬送動作が中断されると、図16に示した“検体ラック停止処理”に従って検体ラックLの搬送が停止される。しかる後、図17に示した“搬送再開処理”に従って検体ラックLの搬送が再開される。これにより、検体ラックLの搬送が停止された場合でも、操作者は、搬送経路上で停止した検体ラックLを初期位置(ラックセット領域A)に戻す必要がなくなるため、操作者の負担が軽減されながら、検体ラックLの搬送動作が再開され得る。
【0149】
また、本実施の形態によれば、搬送動作の中断期間中において、ラック横送り機構B2の係合爪B32aが検体ラックLの凹部Laに係合しているため、かかる中断期間中に、検体ラックLが搬送路Bから外れるのを抑止することができる。また、かかる中断期間中は、ステッピングモータB43に励磁がかけ続けられるため、検体ラックLが移動されるのが抑制され得る。これにより、検体ラックLの搬送動作が不具合なく再開され得る。
【0150】
また、図13に示したように、搬送再開に先立って検体ラックLの位置を搬送停止時の位置に戻すようにすれば、搬送中断中に、何らかの要因により検体ラックLの位置が変化したとしても、不具合なく検体ラックLの搬送が再開され得る。
【0151】
また、本実施の形態によれば、搬送動作の中断に応じて、検体ラックLが蓋部55に覆われた領域に位置づけられるため、搬送動作の中断期間中に、操作者が検体ラックLに接触することが抑制され得る。
【0152】
また、本実施の形態によれば、搬送動作の中断原因が生じると、所定位置(搬送中断位置または先読み位置)に検体ラックLを移動させた後に検体ラックLを停止させ、上記所定位置から検体ラックLの搬送動作を再開しているため、検体ラックLを初期位置(ラックセット領域A)などに一旦移動させてから搬送動作を再開させるといった複雑な制御を伴うことなく、より簡易に搬送動作を再開させることができる。
【0153】
また、本実施の形態によれば、検体の吸引中に搬送動作が中断されると、検体分注ユニット21、22のピペットが検体容器Tから抜き出された後に、検体ラックLが搬送中断位置に移動されるため、検体ラックLが搬送中断位置に移動される際に、検体分注ユニット21、22のピペットと検体容器Tおよび検体ラックLとの接触が回避される。
【0154】
また、本実施の形態によれば、搬送動作の再開時には、搬送制御リストの吸引状況に基づいて、検体の吸引が未完了である検体容器Tについてのみ検体の吸引が行われ、既に検体の吸引が完了している検体容器Tについては検体の吸引が行われないため、効率的に搬送動作が再開され得る。
【0155】
また、本実施の形態によれば、搬送動作の再開時には、搬送制御リストに基づいて、先読みが行われていない検体容器Tについてのみ先読みが行われ、既に先読みが行われた検体容器Tについては先読みが行われないため、迅速に検体ラックLを検体吸引位置52、53へと搬送され得る。
【0156】
以上、本発明の実施形態ついて説明したが、本発明は、上記実施形態に制限されるものではなく、また、本発明の実施形態も上記以外に種々の変更が可能である。
【0157】
たとえば、上記実施の形態では、搬送動作の中断原因が生じると、所定位置(搬送中断位置または先読み位置)に検体ラックLを移動させた後に検体ラックLを停止させているが、本発明はこれに限定されない。搬送中断原因が生じた時点での位置に検体ラックLを停止させてもよく、例えば搬送中断原因が生じた時に検体ラックLが搬送中断位置と先読み位置との間に位置している場合には、その位置に検体ラックLを停止させてもよい。この場合、センサによって正確な位置が認識し得る搬送中断位置または先読み位置に検体ラックLを一旦移動させ、その位置から検体ラックLの搬送動作を再開させてもよい。このようにすれば、より簡易な制御で検体ラックLの搬送動作を再開させることができる。
【0158】
また、上記実施の形態では、操作者による測定再開指示があった場合に、検体ラックLの搬送動作を再開させているが、本発明はこれに限定されず、上述の自動中断事由(キュベット不足、試薬不足など)が解消されたことを検出すると、自動的に検体ラックLの搬送動作を再開させてもよい。
【0159】
また、上記実施の形態では、検体処理装置1を血液凝固分析装置としたが、これに限定されるものではない。検体処理装置1は、例えば、血清を測定する免疫分析装置、全血中の血球を計数する血球計数装置、尿を測定する尿分析装置、又は骨髄液を分析する分析装置とすることもできる。
【0160】
また、上記実施の形態では、検体処理部として、検体の測定を行う測定ユニット10が用いられたが、検体処理部は、検体をスライドガラスに塗沫して塗沫標本を作製する塗沫標本作製ユニットであっても良い。
【0161】
また、上記実施の形態では、検体ラックLの搬送が中断されたときに、ラック横送り機構B2の係合爪B32aが、図5(c)、(d)に示したように、検体ラックLに係合された状態で、ステッピングモータB43に励磁がかけ続けられ、これにより検体ラックLの移動が抑制された。しかしながら、これに替えて、検体ラックLの搬送が中断されたときに、検体ラックLを搬送領域Bの所定領域に固定するためのロック機構が別途設けられても良い。
【0162】
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
【符号の説明】
【0163】
1 … 検体処理装置
3 … 情報処理装置
10 … 測定ユニット
21c、22c … ピペット
50 … 搬送ユニット
51 … バーコードリーダ
55 … 蓋部
200 … 制御部
221 … ラック横送り機構ステッピングモータ部
223 … モータ駆動回路
232 … 試薬残量検出部
233 … 液量検出部
234 … キュベット貯留量検出部
235 … ラック検出部
303 … RAM
304 … ハードディスク
320 … 表示部
B3 … 係合ユニット
B4 … 移動機構
B34 … エアシリンダ
【技術分野】
【0001】
本発明は、血液等の検体に対し処理を行う検体処理装置に関する。
【背景技術】
【0002】
従来、検体ラックに保持された検体容器から検体を吸引して処理を行う検体処理装置が知られている(たとえば、特許文献1参照)。この種の検体処理装置では、検体容器を保持した検体ラックを吸引位置に搬送するための搬送部が配されている。複数の検体容器を保持した検体ラックが搬送部上のラックセット領域にセットされる。ラックセット領域にセットされた検体ラックは、搬送部により測定部前の吸引位置に向かって搬送され、検体ラックに収容された各検体容器が、順次、吸引位置に位置づけられる。また、吸引位置へ検体ラックが搬送される間に、バーコードリーダによって、検体ラックに収容された全ての検体容器のバーコードが読み取られる。検体ラックに収容された全ての検体容器内の検体について吸引が終了すると、検体ラックが搬送部上のラック収容領域に搬送される。
【0003】
このような検体処理装置では、検体ラックの搬送動作中に所定の中断原因が発生すると、検体ラックの搬送動作が中断される。この場合、ユーザは、検体ラックを中断位置からラックセット領域に戻した後、検体ラックの搬送動作を再開させていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−32688号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記検体処理装置では、検体ラックの搬送が中断されると、ユーザは、検体ラックをラックセット領域に戻した後、搬送動作を再開させなければならず、ユーザの手間がかかるとの問題が生じる。
【0006】
かかる事情に鑑み、本発明は、検体ラックの搬送が中断された場合に、ユーザの負担の軽減を図りながら、検体ラックの搬送を再開させることができる検体処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の主たる態様に係る検体処理装置は、検体取込位置に位置づけられた検体容器から検体を取り込んで所定の処理を行うための検体処理部と、検体容器を保持可能な検体ラックを前記検体取込位置に向けて搬送するための搬送部と、前記検体ラックの搬送動作中に搬送中断原因が生じると、前記搬送部による前記検体ラックの搬送を停止させる停止処理を実行し、前記停止処理により前記検体ラックが停止した停止位置から、前記搬送部による前記検体ラックの搬送動作を再開させる搬送制御手段とを備える。
【0008】
本態様に係る検体処理装置によれば、検体ラックの搬送が停止された場合でも、検体ラックが停止した停止位置から検体ラックの搬送動作が再開される。このため、搬送動作の再開にあたり、検体ラックを搬送開始位置に戻すといった煩雑な作業を省略することができる。よって、操作者の負担の軽減を図りながら、検体ラックの搬送動作を再開させることができる。
【0009】
本態様に係る検体処理装置において、前記搬送部は、前記検体ラックと係合するよう駆動される係合機構と、前記係合機構を駆動する係合駆動部と、前記検体ラックに係合した前記係合機構を前記搬送方向に移動させるための移動機構と、前記移動機構を駆動するモータと、前記モータを駆動するモータ駆動部と、を備え、前記搬送制御手段は、前記搬送動作の中断中、前記係合機構が前記検体ラックに係合した状態で前記モータに励磁がかけ続けられるように、前記係合駆動部および前記モータ駆動部を制御するよう構成され得る。こうすると、搬送動作の中断中に検体ラックの位置がずれることが抑制されるため、不具合なく搬送動作を再開させることができる。
【0010】
また、本態様に係る検体処理装置において、前記搬送制御手段は、搬送経路上における前記検体ラックの位置に関する情報を取得し、前記停止位置に関する情報と、前記再開時における前記検体ラックの位置に関する情報とに基づいて、前記搬送部に前記検体ラックの搬送動作を再開させるよう構成され得る。こうすると、搬送動作の中断中に検体ラックの位置がずれても、ずれた後の検体ラックの位置が分かるため、不具合なく搬送動作を再開させることができる。
【0011】
また、本態様に係る検体処理装置において、前記搬送部は、前記検体ラックと係合するよう駆動される係合機構と、前記係合機構を駆動するための係合駆動部と、を有し、前記搬送制御手段は、前記搬送動作の中断中、前記係合機構が前記検体ラックに係合した状態を維持するよう、前記係合駆動部を制御するよう構成され得る。こうすると、搬送動作の中断中に、誤って、検体ラックが取り換えられるのを防止できるため、検体に対する処理を適正に行うことができる。
【0012】
また、本態様に係る検体処理装置において、前記搬送制御手段は、前記停止処理として、前記搬送中断原因が生じた時点における前記検体ラックの位置から所定位置に前記検体ラックを搬送した後、前記検体ラックを停止させる処理を実行するよう構成され得る。こうすると、検体ラックを搬送開始位置などに一旦移動させてから搬送動作を再開させるといった複雑な制御を伴うことなく、より簡易に搬送動作を再開させることができる。
【0013】
この構成において、前記搬送部は、前記検体ラックの搬送経路の一部を覆うための蓋部を備え、前記所定位置は、前記蓋部で覆われた位置とされ得る。こうすると、搬送動作の中断の際に、蓋部に覆われていない領域に検体容器が位置付けられていても、中断中は、検体ラックに保持された全ての検体容器が蓋部によって覆われることとなる。これにより、搬送動作の中断中に、検体ラックに保持された検体容器中の検体に異物が混入するのを防止することができ、且つ、この検体ラックに保持された検体容器が誤って取り換えられるのを防止することができる。よって、検体に対する処理を適正に行うことができる。
【0014】
また、本態様に係る検体処理装置において、前記検体処理部は、前記検体ラックに保持された検体容器から検体を吸引するためのピペットを含み、前記搬送制御手段は、検体容器内に前記ピペットが挿入されているときに前記搬送中断原因が生じると、前記ピペットが当該検体容器から取り出された後に、前記検体ラックを前記所定位置に搬送させるよう構成され得る。こうすると、検体ラックを所定位置に移動させるときに、検体容器にピペットが接触するのを防止することができる。
【0015】
また、本態様に係る検体処理装置において、前記検体ラックは複数の検体容器を保持可能であり、前記搬送制御手段は、前記検体ラックに保持された検体容器が前記検体取込位置に位置しているときに前記搬送中断原因が生じた場合には、搬送動作の再開時において、既に検体の取り込みが完了した検体容器は前記検体取込位置に移動させず、未だ検体の取り込みが完了していない検体容器を前記検体取込位置に移動させるよう、前記搬送部による搬送動作を制御するよう構成され得る。こうすると、検体の取り込みが完了している検体容器からは検体の取り込みが行われないため、効率的に搬送動作を再開させることができる。
【0016】
この場合、検体処理装置は、前記検体ラックに保持された各検体容器に対する検体の取込状況を記憶する記憶部をさらに備える構成とされ、前記搬送制御手段は、前記記憶部に記憶された前記取込状況に基づいて、前記搬送部による搬送再開動作を制御するよう構成され得る。
【0017】
また、本態様に係る検体処理装置は、前記検体ラックは複数の検体容器を保持可能であり、前記検体取込位置に向かう搬送経路の途中において前記検体ラックに保持された各検体容器の識別情報を読み取る識別情報読取部をさらに備え、前記搬送制御手段は、前記検体ラックに保持された全ての検体容器について識別情報の読み取りが完了した後に前記搬送中断原因が生じた場合、搬送動作の再開時において、前記検体ラックを、前記識別情報読取部による読取位置に戻すことなく、前記検体取込位置に向けて搬送するよう、前記搬送部を制御する構成とされ得る。こうすると、搬送動作の再開時に、再度、検体容器の識別情報が読み取られることがないため、検体容器を迅速に、検体取込位置に送ることができる。
【0018】
この構成において、前記搬送制御手段は、前記識別情報読取部による前記識別情報の読み取り動作の途中で前記搬送中断原因が生じた場合、搬送動作の再開時において、前記検体ラックに保持された残り全ての検体容器に対する識別情報の読み取りが完了した後に、前記検体ラックを前記検体取込位置に向けて搬送するよう、前記搬送部を制御する構成とされ得る。
【0019】
また、本態様に係る検体処理装置は、前記搬送部の搬送動作が中断された場合に、搬送途上にある前記検体ラックを操作者が搬送動作の再開のために移動させる必要がない旨を通知する通知手段をさらに備えるよう構成され得る。こうすると、操作者が、誤って検体ラックを搬送開始位置に移動させようとするのを防止することができる。
【0020】
また、本態様に係る検体処理装置は、前記検体処理部に用いられる試薬の残量が所定量未満であること、前記検体処理部に用いられるキュベットの残量が所定量未満であること、前記検体処理部に用いられる洗浄水の残量が所定量未満であること、および、前記搬送部に所定数以上の検体ラックが貯留されていること、の少なくとも一つを検出する検出手段を備え、前記搬送中断原因は、前記検出手段が前記検出を行ったこととされ得る。
【0021】
また、本態様に係る検体処理装置は、前記搬送部の搬送動作の中断指示を受け付ける受付手段を備え、前記搬送中断原因は、前記受付手段が前記中断指示を受け付けたことを含むものとされ得る。
【発明の効果】
【0022】
以上のとおり、検体ラックの搬送が中断された場合に、ユーザの負担の軽減を図りながら、検体ラックの搬送を再開させることができる検体処理装置を提供することができる。
【0023】
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。ただし、以下に示す実施の形態は、あくまでも、本発明を実施化する際の一つの例示であって、本発明は、以下の実施の形態により何ら制限されるものではない。
【図面の簡単な説明】
【0024】
【図1】実施形態に係る検体処理装置の構成を示す図である。
【図2】実施形態に係る測定装置の内部の概略構成を示す平面図である。
【図3】実施形態に係る検体容器と検体ラックの構成を示す図である。
【図4】実施形態に係る搬送ユニットの構成を示す平面図である。
【図5】実施形態に係る係合ユニットの要部を示す概略図である。
【図6】実施形態に係る搬送ユニットの斜視図である。
【図7】実施形態に係る測定装置の回路構成を示す図である。
【図8】実施形態に係る情報処理装置の回路構成を示す図である。
【図9】実施形態に係る情報処理装置の表示部に表示される試薬情報画面の例示図である。
【図10】実施形態に係る検体吸引処理を示すフローチャートである。
【図11】実施形態に係る中断・再開処理を示すフローチャートである。
【図12】実施形態に係る情報処理装置の表示部に表示される測定中断メッセージの例示図である。
【図13】実施形態に係る中断・再開処理を示すフローチャートの変更例である。
【図14】実施形態に係る先行ラックと後行ラックの搬送制御リストを示す図である。
【図15】実施形態に係るジョブリストを示す図である。
【図16】実施形態に係る検体ラック停止処理を示すフローチャートである。
【図17】実施形態に係る搬送再開処理を示すフローチャートである。
【図18】実施形態に係る排出処理と、ジョブリスト表示処理を示すフローチャートである。
【図19】実施形態に係る検体ラック排出処理を示すフローチャートである。
【発明を実施するための形態】
【0025】
以下、本実施の形態に係る検体処理装置について、図面を参照して説明する。
【0026】
図1は、本実施の形態に係る検体処理装置1の構成を示す図である。検体処理装置1は、検体(血漿)に試薬を添加することで調製された測定試料に光を照射して、凝固法、合成基質法、免疫比濁法および凝集法を用いて、検体の光学的な測定および分析を行う血液凝固分析装置である。検体処理装置1は、検体(血漿)に含まれる成分を光学的に測定する測定装置2と、測定装置2による測定データを分析するとともに、測定装置2に操作指示を与える情報処理装置3とで構成されている。
【0027】
測定装置2には、図示の如く、本体カバー29が設けられている。本体カバー29は、回転軸29aを中心として図示のように回動し、これにより、後述する測定ユニット10内が開閉可能となる。
【0028】
図2は、測定装置2の内部を上方向から見たときの概略構成を示す平面図である。測定装置2は、測定ユニット10と、検出ユニット40と、搬送ユニット50とによって構成されている。
【0029】
搬送ユニット50には、図示の如く、検体ラックLを載置可能なラックセット領域Aと、搬送領域Bと、ラック収容領域Cが設けられている。検体ラックLには検体容器Tを複数保持できるよう保持部が形成されており、検体容器Tには測定を行う検体が収容されている。
【0030】
ラックセット領域Aにセットされた検体ラックLは、ラックセット領域Aに沿って奥方向(Y軸正方向)に搬送され、搬送領域Bの右端(X軸負方向の端)に送り出される。搬送領域Bの右端に位置づけられた検体ラックLは、搬送領域Bに沿って左方向(X軸正方向)に搬送される。
【0031】
搬送領域Bには、図示の如く、左右(X軸正方向および負方向)に移動可能なバーコードリーダ51が設置されている。バーコードリーダ51は、検体容器Tと検体ラックLにそれぞれ貼付されたバーコードラベルを、搬送領域B上の所定位置にて読み取る。また、搬送領域Bの所定位置には、検体吸引位置52、53が設定されている。
【0032】
検体吸引位置52、53に検体容器Tが位置づけられると、かかる検体容器Tに収容されている検体は、それぞれ、後述する検体分注ユニット21、22によって吸引される。検体ラックLに保持されている検体容器Tの検体が全て吸引されると、かかる検体ラックLは、搬送領域Bの左端まで搬送される。
【0033】
なお、本実施の形態の検体処理装置1は、“標準測定”と“微量測定”の2種類の測定モードが選択可能に構成されている。検体容器Tの検体は、標準測定時には検体吸引位置52において検体分注ユニット21により吸引され、微量測定時には検体吸引位置53において検体分注ユニット22により吸引される。
【0034】
搬送領域Bの左端に位置づけられた検体ラックLは、ラック収容領域Cに沿って手前方向(Y軸負方向)に移動され、かかる検体ラックLの搬送動作が終了する。搬送ユニット50の搬送動作は、ラックセット領域Aにセットされた全ての検体ラックLに対して連続して行われる。
【0035】
検体分注ユニット21は、支持部21aと、支持部21aに支持されたアーム21bと、アーム21bの先端に取り付けられたピペット21cを備えている。支持部21aは、下面裏側に配されたステッピングモータ211a(図7参照)により回転駆動され、アーム21bは、ステッピングモータ211aにより上下方向(Z軸正方向および負方向)に駆動される。ピペット21cが用いられることにより検体が吸引され吐出される。支持部21aが回転駆動されると、ピペット21cが支持部21aを中心とした円周上を移動する。
【0036】
同様に、検体分注ユニット22も、検体分注ユニット21と同様の構成となっている。すなわち、検体分注ユニット22は、支持部22aと、アーム22bと、アーム22bの先端に取り付けられたピペット22cを備えている。支持部22aは、下面裏側に配されたステッピングモータ211b(図7参照)により回転駆動され、アーム22bは、ステッピングモータ211bにより上下方向に駆動される。ピペット22cが用いられることにより、検体が吸引され吐出される。
【0037】
検体吸引時、検体分注ユニット21、22は、まず、支持部21a、22aを回動させ、ピペット21c、22cを検体吸引位置52、53上に位置づける。しかる後、アーム21b、22bが下方向に駆動され、ピペット21c、22cが検体容器T内に挿入される。その後、吸引が完了すると、アーム21b、22bが上方向に駆動され、ピペット21c、22cが検体容器Tから抜き出される。
【0038】
検体吸引位置52、53にて吸引された検体は、直接またはキュベットテーブル15上のキュベットを経由して、キュベット搬送器31上のキュベットに収容される。その際、適宜、希釈液搬送器32にセットされた希釈液が検体分注ユニット22により吸引され、キュベットに混和される。その後、キュベット搬送器31が右方向(X軸負方向)に駆動され、キュベットがキャッチャユニット26の前に搬送される。続いて、キャッチャユニット26により、キュベット搬送器31にセットされたキュベットが把持され、加温テーブル16にセットされる。その後、キュベットは、キャッチャユニット27、28により搬送され、検出ユニット40にセットされる。その際、試薬分注ユニット23、24、25により、適宜、試薬テーブル11、12に保持された試薬がキュベットに注入される。その後、検出ユニット40による処理が行われ、キュベット中の測定試料に含まれる成分を反映した光学的情報が検出される。
【0039】
キュベット供給ユニット33は、投入された複数のキュベットを、キュベット貯留部33aに順次供給することが可能に構成されている。キュベット貯留部33aに供給された新しいキュベットは、キャッチャユニット26、27により、それぞれ、キュベットテーブル15とキュベット搬送器31の保持孔にセットされる。また、分析が終了し不要となったキュベットは、キャッチャユニット27、28により、それぞれ、廃棄口34、35に廃棄される。なお、検体分注ユニット21、22と試薬分注ユニット23〜25のピペットは、所定の洗浄位置(図示せず)で洗浄される。洗浄に用いられた洗浄液は、廃液タンク(図示せず)に収容される。
【0040】
試薬テーブル11、12には、それぞれ、容器ラック13、14が載置されている。この容器ラック13、14には、複数の試薬容器が保持されており、かかる試薬容器に試薬が収容されている。試薬容器に収容されている試薬の交換などを行う場合には、測定ユニット10の測定動作が中断された後、図1に示す本体カバー29が開放される。これにより、操作者は、試薬テーブル11、12から試薬容器を取り出して、試薬の交換などを行うことができる。
【0041】
図3は、検体容器Tと検体ラックLの構成を示す図である。同図(a)は、検体容器Tの外観を示す斜視図であり、同図(b)、(c)は、検体ラックLの正面図である。なお、同図(b)、(c)は、検体ラックLが搬送ユニット50にセットされたとき、検体ラックLを図2のY軸負方向に見たときの正面図である。
【0042】
図3(a)を参照して、検体容器Tは、透光性を有するガラスまたは合成樹脂により構成された管状容器であり、上端が開口している。内部には患者から採取された血液検体が収容され、上端の開口は蓋部CPにより密封されている。検体容器Tの側面には、バーコードラベルBL1が貼付されている。バーコードラベルBL1には、検体IDを示すバーコードが印刷されている。
【0043】
同図(b)を参照して、検体ラックLには、10本の検体容器Tを垂直状態(立位状態)で並べて保持することが可能となるよう10個の保持部が形成されている。保持部には、右から1〜10の保持位置の番号が割り当てられている。また、検体ラックLのY軸正方向の側面には、バーコードラベルBL2が貼付されている。バーコードラベルBL2には、ラックIDを示すバーコードが印刷されている。
【0044】
また、同図(b)に示す如く、検体ラックLの底面には、下方に開放された凹部Laが、検体ラックLの長手方向に沿って保持部と同数の10個形成されている。各凹部Laは、各凹部Laの左右に配された璧部Lbによって区画されている。
【0045】
なお、検体ラックLは、同図(c)のように構成されても良い。この場合の検体ラックLの底面には、凹部Lcが1個形成されている。
【0046】
図4(a)は、搬送ユニット50の構成を示す平面図である。
【0047】
ラックセット領域Aには、載置された検体ラックLをY軸正方向に搬送するラック送込機構A1が設けられている。ラック送込機構A1は、ラックセット領域Aに載置された検体ラックLの手前(Y軸負方向)の側面を押してY軸正方向に搬送し、かかる検体ラックLを搬送領域Bに送り込むよう構成されている。また、ラックセット領域Aに複数の検体ラックLが載置されている場合も、図示の如く、最も手前(Y軸負方向)の検体ラックLの手前側面を押して、最も奥(Y軸正方向)の検体ラックLを搬送領域Bに送り込む。
【0048】
また、ラックセット領域Aには、図示の如く、ラックセット領域AのY軸正方向の端とY軸負方向の端に一対のセンサA2が設けられている。センサA2は、透過型のフォトセンサ等からなる。センサA2は、ラックセット領域Aに検体ラックLが存在すると遮光状態となり、検体ラックLが存在しないと透過状態となるように構成されている。
【0049】
搬送領域Bには、検体ラックLの底面を支持する搬送路B1と、2つのラック横送り機構B2が設けられている。2つのラック横送り機構B2は、搬送路B1の下方に配置されており、搬送路B1上に配置された2つの検体ラックLを左右(X軸正方向および負方向)に独立して移動させる。なお、ラック横送り機構B2の構成については、追って、図4(b)と図5を参照して説明する。
【0050】
ここで、搬送領域Bに送り込まれた検体ラックLは、検体吸引位置52、53に搬送される前に、バーコードリーダ51により、検体容器TのバーコードラベルBL1と検体ラックLのバーコードラベルBL2の読み取り(以下、「先読み」という)が行われる。バーコードリーダ51による先読みは、図示の如く、検体ラックLが搬送領域B上の“先読み位置”の範囲にあるときに行われる。
【0051】
また、搬送領域Bには、図2で示したように、検体吸引位置52、53が設定されている。先読み位置で先読みが行われた検体ラックLは、検体吸引位置52または53の位置に、検体ラックLに保持されている検体容器Tが位置づけられるよう、左方向(X軸正方向)に搬送される。検体吸引位置52または53に位置づけられた検体容器TのバーコードラベルBL1は、バーコードリーダ51による読み取り(以下、「後読み」という)が行われた後、検体の吸引が行われる。
【0052】
なお、検体分注ユニット21、22により検体の吸引が行われているときに、後述の搬送中断原因が発生すると、検体ラックLは“搬送中断位置”まで移動されて、停止される。
【0053】
また、搬送領域Bには、図示の如く、センサB51〜B55が設置されている。センサB51〜55は、反射型のフォトセンサ等からなる。センサB51は、搬送領域Bの右端(X軸負方向の端)に位置づけられた検体ラックLを検出するように構成されている。センサB52は、検体ラックLが先読み位置内に搬送されたことを検出するように構成されている。センサB53、B54は、それぞれ、検体吸引位置52、53に検体ラックLが位置づけられたことを検出するように構成されている。センサB55は、検体ラックLが搬送中断位置に搬送されたことを検出するように構成されている。
【0054】
ラック収容領域Cには、載置された検体ラックLをY軸負方向へ搬送するラック送出機構C1が設けられている。ラック送出機構C1は、搬送領域Bの左端(X軸正方向の端)に配置された検体ラックLを、Y軸負方向に1ピッチ分(検体ラックLの短手方向の幅分)移動させ、検体ラックLを搬送領域Bからラック収容領域Cへ送り出すように構成されている。
【0055】
また、ラック収容領域Cには、図示の如く、検体ラックLの有無を検出するセンサC2が設けられている。センサC2は、反射型のフォトセンサ等からなり、ラック収容領域Cの搬送終端位置(Y軸負方向の端)まで送り出された検体ラックLを検出するように構成されている。
【0056】
同図(b)は、ラック横送り機構B2の構成を示す平面図である。2つのラック横送り機構B2は、Y軸方向に並べて配置されている。ラック横送り機構B2は、検体ラックLに対して係合可能な係合ユニットB3と、係合ユニットB3を左右(X軸正方向および負方向)に移動させる移動機構B4を備えている。
【0057】
移動機構B4は、搬送領域Bの両端部に配置された一対のプーリB41と、プーリB41に掛け渡されたベルトB42と、一方のプーリB41を回転させるステッピングモータB43と、ステッピングモータB43の回転数を検出するロータリーエンコーダB44とを備えている。
【0058】
係合ユニットB3は、移動機構B4のベルトB42に連結され、ステッピングモータB43が駆動されると、左右に移動するように構成されている。係合ユニットB3の移動量は、ステッピングモータB43の回転数としてロータリーエンコーダB44によって検出される。ステッピングモータB43は、ロータリーエンコーダB44の検出結果に基づいて動作制御される。また、係合ユニットB3の移動始点位置と移動終点位置とが、係合ユニットB3の駆動範囲内の右端(X軸負方向の端)と左端(X軸正方向の端)とに、それぞれ設定されている。さらに、移動始点位置と移動終点位置に配置された係合ユニットB3を検出する透過型のフォトセンサ等からなるセンサB55、B56が配置されている。
【0059】
図5は、係合ユニットB3の要部を示す概略図である。同図(a)は、係合ユニットB3が検体ラックLに係合していない状態を示す係合ユニットB3の正面図であり、同図(b)は、係合ユニットB3の側面図であり、同図(c)、(d)は、係合ユニットB3が、検体ラックLに係合している状態を示す係合ユニットB3の正面図である。
【0060】
同図(a)を参照して、係合ユニットB3は、基体B31と、一対の係合部材B32と、作用部材B33とを備えている。また、係合ユニットB3は、作用部材B33を昇降させるための図示しないエアシリンダB34(図7参照)を備えている。
【0061】
基体B31には、ガイド部材(図示せず)が取り付けられており、かかるガイド部材が、搬送路B1の下方においてX軸方向に沿って配置されたガイドレール(図示せず)に摺動自在に係合している。このガイドレールにより、基体B31はX軸正方向および負方向に移動自在に支持されている。
【0062】
一対の係合部材B32は、図示の如く、ボルトおよびナットからなる取付具B31aによって、Y軸回りに回動自在となるよう基体B31の上部に取り付けられている。係合部材B32の上部には、係合爪B32aが形成されており、下端には、係合ローラB32bが設けられている。基体B31には、係合部材B32が取付具B31aを中心として回動するときの係合ローラB32bの回動ラインに沿って、係合ローラB32bの回動範囲を規制するための規制孔(図示せず)が形成されている。係合ローラB32bは、この規制孔に移動可能に係合されている。これにより、係合部材B32は、取付具B31aを中心としてY軸回りに所定範囲に限り回動可能となっている。
【0063】
作用部材B33の上部には、一対の係合ローラB32bが係合する左右方向に長い矩形状の係合孔B33aが形成されている。作用部材B33がZ軸方向に駆動されると、係合孔B33aに係合された係合ローラB32bを介して、一対の係合部材B32が取付具B31aを中心としてY軸周りに回動する。同図(a)に示す如く、一対の係合部材B32が下方向(Z軸負方向)に回動している状態では、係合爪B32aは、搬送路B1より下方に位置しており、検体ラックLには係合しない。
【0064】
エアシリンダB34には図示しないコンプレッサから圧縮空気が供給される。また、エアシリンダB34は、圧縮空気の供給によって上下方向に昇降運動するロッドを備えている。エアシリンダB34のロッドの上端には、作用部材B33が固定されている。エアシリンダB34のロッドが上下に昇降すると、作用部材B33が共に上下に昇降し、これに伴い一対の係合部材B32が上下に回動する。
【0065】
同図(b)を参照して、上記の如く、係合部材B32の回動により、係合爪B32aが、図示の如く、搬送路B1に形成された溝を通って搬送路B1上に突出する状態と突出しない状態が切り替えられる。
【0066】
同図(c)を参照して、係合部材B32が上方向(Z軸正方向)に回動すると、係合爪B32aが搬送路B1上に突出すると共に、検体ラックLの底部に形成された凹部Laに進入し、一対の係合爪32aが互いに離反する。これにより、係合爪32aは、図示の如く、凹部LaにおけるX軸正方向および負方向の両側の璧部Lbに当接する。こうして、一対の係合部材B32が検体ラックLに係合し、検体ラックLが搬送可能な状態となる。
【0067】
なお、同図(d)を参照して、図3(c)に示した検体ラックLが用いられる場合も、係合爪B32aが搬送路B1上に突出すると共に、検体ラックLの底部に形成された凹部Lcに侵入し、一対の係合爪32aが互いに離反する。この場合、係合爪B32aは、図示の如く、凹部Lcに形成された凸状の璧部に係合する。これにより、図3(b)に示した検体ラックLと同様、図3(c)に示した検体ラックLも搬送可能な状態となる。
【0068】
このような係合ユニットB3が、搬送路B1の下方に、図4(b)に示す如く、Y軸方向に向かい合うように配置されている。これにより、搬送領域Bにおいて、2つの検体ラックLが独立して駆動される。
【0069】
このようにラック横送り機構B2が構成されると、検体ラックLの底面の凹部Laが係合爪B32aにより支持されながら、検体ラックLが搬送路B1上を搬送されることとなる。また、後述の搬送中断原因が発生すると、検体ラックLは搬送領域B上で停止されるが、この場合も、検体ラックLの底面の凹部Laが係合爪B32aにより支持された状態が維持される。さらに、検体ラックLが停止される場合、ステッピングモータB43に励磁がかけ続けられる。これにより、検体ラックLの位置ずれが抑制される。
【0070】
図6は、搬送ユニット50の斜視図である。
【0071】
搬送領域Bの中央付近の上部(Z軸正方向)には、屋根54が設置されている。屋根54の右端(X軸負方向の端)部分と、屋根54の左端(X軸正方向の端)には、図示の如く、それぞれ、鍔部54a、54bが設けられている。また、屋根54には、図示の如く、開口54c、54dが形成されている。検体分注ユニット21、22は、それぞれ、開口54c、54dを介して、検体吸引位置52、53に位置づけられた検体容器Tの検体を吸引する。また、搬送領域Bの手前(Y軸負方向)には、図示の如く、蓋部55が取り外し可能に設置されている。
【0072】
このように搬送ユニット50が構成されると、搬送領域B内にある検体ラックLと検体容器Tは、開口54a、54bの領域を除き、上側が塞がれた状態になっている。これにより、搬送領域B内にある検体容器Tに上方から異物が混入されることや、操作者が検体ラックLと検体容器Tに接触することが抑制される。また、このように搬送ユニット50が構成されると、操作者が、搬送領域Bの中央付近(蓋部55により覆われた領域)にある検体ラックLと検体容器Tに触れることができなくなる。これにより、操作者が検体ラックLと検体容器Tに接触することが抑制される。
【0073】
なお、図4で示した先読み位置は、蓋部55に覆われた範囲内にある。すなわち、検体ラックLが先読み位置に位置づけられると、検体ラックLは、蓋部55内に完全に収容されることとなる。また、図4で示した搬送中断位置も、蓋部55に覆われた範囲内にある。すなわち、検体ラックLの検体が吸引されるときに、検体ラックLの左端が蓋部55からはみ出している場合でも、後述の搬送中断原因が発生すると、検体ラックLは、蓋部55内にある搬送中断位置に位置づけられる。これにより、測定動作中断中に、操作者が検体ラックLと検体容器Tに接触することが、さらに抑制される。
【0074】
図7は、測定装置2の回路構成を示す図である。
【0075】
測定装置2は、制御部200と、バーコードリーダ51と、分注ユニットステッピングモータ部211と、分注ユニットロータリーエンコーダ部212と、モータ駆動回路213と、ラック横送り機構ステッピングモータ部221と、ラック横送り機構ロータリーエンコーダ部222と、モータ駆動回路223と、エアシリンダB34と、温度検出部231と、試薬残量検出部232と、液量検出部233と、キュベット貯留量検出部234と、ラック検出部235と、センサ部236と、測定ユニット駆動部237を含んでいる。
【0076】
また、制御部200は、CPU201と、ROM202と、RAM203と、ハードディスク204と、通信インターフェース205と、I/Oインターフェース206を有する。
【0077】
CPU201は、ROM202に記憶されているコンピュータプログラムおよびRAM203にロードされたコンピュータプログラムを実行する。RAM203は、ROM202およびハードディスク204に記録されているコンピュータプログラムの読み出しに用いられる。また、RAM203は、これらのコンピュータプログラムを実行するときに、CPU201の作業領域としても利用される。ハードディスク204には、オペレーティングシステムおよびアプリケーションプログラムなど、CPU201に実行させるための種々のコンピュータプログラムおよびコンピュータプログラムの実行に用いるデータがインストールされている。また、通信インターフェース205により、情報処理装置3に対してデータの送受信が可能となる。
【0078】
また、CPU201は、I/Oインターフェース206を介して、バーコードリーダ51と、分注ユニットロータリーエンコーダ部212と、モータ駆動回路213と、ラック横送り機構ロータリーエンコーダ部222と、モータ駆動回路223と、エアシリンダB34と、温度検出部231と、試薬残量検出部232と、液量検出部233と、キュベット貯留量検出部234と、ラック検出部235と、センサ部236と、測定ユニット駆動部237に接続されている。
【0079】
分注ユニットステッピングモータ部211は、検体分注ユニット21の支持部21a、検体分注ユニット22の支持部22aをそれぞれ独立して回転駆動させるステッピングモータ211a、211bで構成されている。分注ユニットロータリーエンコーダ部212は、検体分注ユニット21、22のそれぞれのステッピングモータ211a、211bに配されたロータリーエンコーダ212a、212bで構成されている。モータ駆動回路213は、CPU201の制御により、分注ユニットステッピングモータ部211に含まれるステッピングモータ211a、211bを駆動させる。
【0080】
ラック横送り機構ステッピングモータ部221は、2つのラック横送り機構B2のステッピングモータB43で構成されている。ラック横送り機構ロータリーエンコーダ部222は、2つのラック横送り機構B2のロータリーエンコーダB44で構成されている。モータ駆動回路223は、CPU201の制御により、ラック横送り機構ステッピングモータ部221に含まれる2つのステッピングモータB43を独立して駆動させる。
【0081】
なお、分注ユニットロータリーエンコーダ部212とラック横送り機構ロータリーエンコーダ部222を構成する各ロータリーエンコーダには、インクリメンタル方式のものが用いられている。このロータリーエンコーダは、ステッピングモータの回転変位量に応じたパルス信号を出力するように構成されており、ロータリーエンコーダから出力されたパルス数をカウントすることで、ステッピングモータの回転量を検出することができる。
【0082】
温度検出部231は、温度センサを備え、加温テーブル16の温度を検出する。試薬残量検出部232は、液面検知センサを備え、試薬テーブル11、12に配置された試薬容器内の試薬の残量を検出する。液量検出部233は、複数の液面検知センサを備え、検体分注ユニット21、22と試薬分注ユニット23〜25の洗浄に用いられる洗浄液が収容されている洗浄液タンクの残量を検出し、廃棄された洗浄液を収容する廃液タンクの廃液量を検出する。キュベット貯留量検出部234は、キュベット貯留量センサを備え、キュベット供給ユニット33に収容されているキュベットの残量を検出する。ラック検出部235は、搬送ユニット50に設置されているセンサA2、B51〜B55、C2で構成されている。センサ部236は、本体カバー29が開放されていることを検出するフォトセンサを含んでいる。測定ユニット駆動部237は、検体分注ユニット21、22と試薬分注ユニット23〜25の分注動作が行われるよう、これら分注ユニットに圧力を供給する空圧源と、各テーブル(試薬テーブル11、12、キュベットテーブル15、加温テーブル16)を駆動させる駆動部を含んでいる。
【0083】
図8は、情報処理装置3の回路構成を示す図である。
【0084】
情報処理装置3は、パーソナルコンピュータからなっており、本体300と、入力部310と、表示部320から構成されている。本体300は、CPU301と、ROM302と、RAM303と、ハードディスク304と、読み出し装置305と、入出力インターフェース306と、画像出力インターフェース307と、通信インターフェース308を有する。
【0085】
CPU301は、ROM302に記憶されているコンピュータプログラムおよびRAM303にロードされたコンピュータプログラムを実行する。RAM303は、ROM302およびハードディスク304に記録されているコンピュータプログラムの読み出しに用いられる。また、RAM303は、これらのコンピュータプログラムを実行するときに、CPU301の作業領域としても利用される。
【0086】
ハードディスク304には、オペレーティングシステムおよびアプリケーションプログラムなど、CPU301に実行させるための種々のコンピュータプログラムおよびコンピュータプログラムの実行に用いるデータがインストールされている。すなわち、ハードディスク304には、測定装置2の試薬状態を受信し、試薬の残量などをメッセージとして表示部309上に表示等を行う表示プログラムや、試薬の交換または追加の操作指示に従って測定装置2を操作するための操作プログラムがインストールされている。
【0087】
読出装置305は、CDドライブまたはDVDドライブ等によって構成されており、記録媒体に記録されたコンピュータプログラムおよびデータを読み出すことができる。入出力インターフェース306には、マウスやキーボードからなる入力部310が接続されており、操作者が入力部310を使用することにより、情報処理装置3にデータが入力される。画像出力インターフェース307は、ディスプレイ等で構成された表示部320に接続されており、画像データに応じた映像信号を、表示部320に出力する。表示部320は、入力された映像信号をもとに、画像を表示する。また、通信インターフェース308により、測定装置2に対してデータの送受信が可能となる。
【0088】
図9は、情報処理装置3の表示部320に表示される試薬情報画面の例示図である。試薬情報画面には、配置表示領域410と、詳細情報表示領域420と、操作指示表示領域430と、操作決定表示領域440が含まれている。
【0089】
配置表示領域410には、試薬テーブル11、12に配置されている容器ラック13、14の位置と、これら容器ラックに収容されている試薬容器の配置状態が表示される。
【0090】
配置表示領域410中の試薬マーク411または412が選択されると、選択された選択マーク位置に保持されている試薬容器の内容物に関する詳細情報が詳細情報表示領域420に表示される。
【0091】
操作指示表示領域430は、検体ラック排出ボタン431を含む複数の指示種別ボタンを有している。操作者により、指示種別ボタンが押下されると、指示種別ボタンに該当する操作が実行される。
【0092】
測定指示表示領域440は、測定中断ボタン441と測定開始ボタン442を有している。操作者により、測定中断ボタン441が押下されると、測定中断処理が行われる。また、測定中断時に、操作者により、測定開始ボタン442が押下されると、測定再開処理が行われる。なお、測定開始ボタン442は、実行可能である場合に有効表示されており、実行不可能である場合に測定開始ボタン442が押下されると、実行不可能である旨が操作者に通知されるよう画面上にメッセージが表示される。
【0093】
次に、検体処理装置の処理動作について説明する。以下の処理動作は、測定装置2と情報処理装置3との間でデータ通信を行いながら、情報処理装置3の制御のもとで行われる。
【0094】
図10は、本実施の形態に係る検体吸引処理の処理フローを示す図である。なお、以下に示す処理フローにおいて、検体ラックLの搬送位置は、ラック横送り機構ロータリーエンコーダ部222からの出力と、ラック検出部235からの出力をもとに、把握されている。
【0095】
本実施の形態では、操作者が情報処理装置3を介して測定開始の指示を入力することにより、測定装置2の測定が開始される。測定装置2のCPU201は、情報処理装置3から測定開始信号を受信すると(S1:YES)、検体ラックLをラックセット領域Aから先読み位置に搬送する(S2)。先読み位置では、検体ラックLのバーコードラベルBL2と、この検体ラックLに保持されている検体容器TのバーコードラベルBL1が、バーコードリーダ51により先読みされる(S3)。
【0096】
先読み位置でのバーコードの読み取りが終了した検体ラックLは、検体吸引位置52または53に搬送される(S4)。検体吸引位置52または53に検体容器Tが位置づけられると、検体容器TのバーコードラベルBL1が、バーコードリーダ51により後読みされる(S5)。続いて、バーコードの読み取りが行われた検体容器Tの検体は、検体吸引位置52または53で、検体分注ユニット21または22により吸引される(S6)。
【0097】
検体ラックLに保持されている全ての検体容器Tの検体が吸引されると(S7:YES)、検体ラックLはラック収容領域Cに送り出され(S8)、この検体ラックLについての検体吸引処理が終了する。検体ラックLに保持されている全ての検体容器Tの検体が吸引されていないと(S7:NO)、この検体ラックLに保持されている検体容器Tの検体が全て吸引されるまで、S4〜S6が繰り返される。
【0098】
なお、検体ラックLが検体吸引位置52または53に位置づけられたとき、後行の検体ラックLがあるときは、後行の検体ラックLについて、S2以降の動作が開始される。この場合、先行の検体ラックLについて後読みが優先的に行われながら、後行の検体ラックLについても先読みが行われるよう、バーコードリーダ51が適宜X軸正方向および負方向に移動される。
【0099】
図11は、測定装置2と情報処理装置3で行われる搬送動作の中断・再開処理の処理フローを示す図である。
【0100】
本実施の形態では、操作者が図9に示した測定中断ボタン441を押下することによって中断指示信号が情報処理装置3から測定装置2に送信されると、検体ラックの搬送動作が中断される。また、所定の自動中断事由が検出された場合、すなわち、キュベット貯留量検出部234によりキュベットの不足が検出された場合、液量検出部233により廃液タンクが一杯であることが検出された場合、液量検出部233により洗浄液の不足が検出された場合、試薬残量検出部232により試薬の不足が検出された場合、ラック検出部235のセンサC2によりラック収容領域Cに検体ラックLが一杯になっていることが検出された場合にも、検体ラックの搬送動作が中断される。
【0101】
図11(a)を参照して、情報処理装置3のCPU301は、測定装置2から、上記自動中断事由を検出したことを示す信号(自動中断信号)を受信すると(S11:YES)、測定が中断された旨の表示を情報処理装置3の表示部320に表示させる(S14)。また、情報処理装置3のCPU301は、操作者により測定中断ボタン441が押されると(S12:YES)、中断指示信号を測定装置2に送信する(S13)。その後、CPU301は、測定が中断された旨の表示を情報処理装置3の表示部320に表示させる(S14)。
【0102】
図12は、情報処理装置3の表示部320に表示される測定中断メッセージの例示図であり、“自動復帰されますので、しばらくお待ち下さい。”と表示されている。なお、表示メッセージは、この他、“検体ラックを移動させる必要はありません。測定が再開されると、検体ラックの搬送は自動的に復帰されます。”等でも良い。これにより、操作者は、検体ラックLをラックセット領域Aにセットし直す必要がないことが分かる。
【0103】
図11(b)を参照して、測定装置2のCPU201は、上記の自動中断事由を検出すると(S21:YES)、自動中断信号を情報処理装置3に送信し(S22)、“検体ラック停止処理”により検体ラックLを停止させる(S23)。また、測定装置2のCPU201は、情報処理装置3から中断指示信号を受信すると(S24:YES)、“検体ラック停止処理”により検体ラックLを停止させる(S23)。なお、“検体ラック停止処理”については、追って図16を参照して説明する。
【0104】
図11(a)を参照して、操作者が、情報処理装置3を介して測定装置2による測定が再開されるよう指示すると(S15:YES)、情報処理装置3のCPU301は、測定再開指示信号を測定装置2に送信し(S16)、処理を終了する。
【0105】
図11(b)を参照して、測定装置2のCPU201は、情報処理装置3から測定再開指示信号を受信すると(S25:YES)、“搬送再開処理”により検体ラックLの搬送を再開させ(S26)、処理を終了する。なお、“搬送再開処理”については、追って図17を参照して説明する。
【0106】
なお、検体ラックが停止された後、検体ラックLの搬送が再開されるまでの間に、検体ラックLの位置がずれる惧れがある場合には、この間に検体ラックLの位置ずれが生じていないか判定されるようにしても良い。
【0107】
図13は、この変更例による、測定装置2のCPU201による検体ラックLの搬送の中断・再開処理の処理フローを示す図である。以下、図11(a)の処理フローと異なる処理ステップについてのみ説明する。
【0108】
S31では、“検体ラック停止処理”によって停止された検体ラックLの搬送領域B上での位置が記憶される。すなわち、この検体ラックLを搬送するラック横送り機構B2のロータリーエンコーダB44から検出される回転量が、情報処理装置3のRAM303またはハードディスク304に記憶される。
【0109】
測定再開指示がされると(S25:YES)、現在のラック横送り機構B2のロータリーエンコーダB44の回転量が検出され(S32)、S31で記憶された回転量が読み出される(S33)。これら2つの回転量の値が比較され、ラック横送り機構B2の位置が変化していると判定されると(S34:YES)、ラック横送り機構B2の位置が、S31で記憶された回転量に基づき戻される(S35)。
【0110】
こうすると、万一ラック横送り機構B2の位置が、検体ラックLの停止直後から変化した場合でも、“搬送再開処理”により検体ラックLの搬送が再開される前に、適正な位置に位置づけられるため、検体ラックLの搬送が円滑に再開され得る。
【0111】
図14は、先行ラックと後行ラックの搬送制御リストを示す図である。同図(a)、(b)は、それぞれ、先行ラックと後行ラックの搬送制御リストを示す図である。なお、先行ラックとは、搬送領域Bにおいて搬送されている2つの検体ラックLのうち、下流(X軸正方向)に位置する検体ラックLのことであり、後行ラックとは、搬送領域Bにおいて搬送されている2つの検体ラックLのうち、上流(X軸負方向)に位置する検体ラックLのことである。
【0112】
搬送制御リストの項目には、同図(a)、(b)に示す如く、ラック位置、保持位置、検体バーコード読取状況、測定モード、吸引状況などが含まれる。搬送制御リストは、測定装置2のRAM203またはハードディスク204に記憶されている。この搬送制御リストによって、先読み後の検体ラックLの搬送動作が制御される。
【0113】
なお、搬送制御リスト中の“測定モード”の項目は、先読み位置で読み取られた検体ラックLのバーコードラベルBL2の情報をもとに、後述するジョブリストから取得される。ジョブリストは、各検体の測定モードを含む測定オーダ情報、測定状況情報、測定結果などを保持しており、測定が行われる新たな検体容器Tのジョブリストへの登録(以下、「オーダ登録」という)が行われる場合や、測定が開始された場合や、測定結果が得られた場合などに更新される。なお、図15に示すように、ジョブリストには、ラック番号と検体容器Tの保持位置(ラック番号−位置)に対応づけて、測定モードが保持されている。先読み位置で検体ラックLのバーコードラベルBL2が読み取られると、読み取られたバーコードラベルBL2に対応するラック番号の各保持位置に対応づけられた測定モードが、ジョブリストから、後行ラックの“測定モード”の項目に転記される。搬送制御リスト中の“吸引状況”の項目は、図10のS6で検体の吸引が行われることによって「未完了」から「完了」に更新される。
【0114】
図14(a)を参照して、“ラック位置”の項目から、先行ラックが検体吸引位置52に位置づけられていることが分かる。また、“検体バーコード読取状況”の項目から、全ての保持位置についてのバーコードリーダ51による先読みが完了していることが分かる。また、“測定モード”の項目から、保持位置1〜4、7〜10の検体容器Tについては標準測定が行われ、保持位置5、6の検体容器Tについては微量測定が行われることが分かる。また、“吸引状況”の項目から、保持位置1〜5の検体容器Tについては、検体の吸引が完了しており、保持位置6〜10の検体容器Tについては、検体の吸引は完了していないことが分かる。
【0115】
同図(b)を参照して、“ラック位置”の項目から、後行ラックが先読み位置に位置づけられていることが分かる。また、“検体バーコード読取状況”の項目から、保持位置1〜5についてはバーコードリーダ51による先読みが完了しており、保持位置6〜10についてはバーコードリーダ51による先読みが完了していないことが分かる。また、“測定モード”の項目から、後行ラックの保持位置1〜3、6、9の検体容器Tについては標準測定が行われ、保持位置4、5、7、8、10の検体容器Tについては微量測定が行われることが分かる。また、“吸引状況”の項目から、全ての保持位置について吸引が完了していないことが分かる。
【0116】
先行ラックがラック収容領域Cに搬送され、先読み位置に位置づけられていた後行ラックが検体吸引位置52または53に位置づけられると、先行ラックの搬送制御リストに後行ラックの搬送制御リストが上書きされ、後行ラックの搬送制御リストが初期化される。また、先読み位置に新たな検体ラックLが位置づけられると、この検体ラックLについて、後行ラックの搬送制御リストが作成される。
【0117】
図15は、ジョブリストを示す図である。
【0118】
図示の如く、ジョブリストには、オーダ登録された検体容器Tについての測定状況、測定オーダ情報、測定結果などが保持されている。なお、ジョブリストは、情報処理装置3のハードディスク304に記憶されている。
【0119】
ジョブリストの項目には、状態、ラック番号−位置、検体番号、測定モード、日付、時刻、PT%(測定結果)などが含まれる。“状態”の項目には、検体に対する測定状況が書き込まれる。オーダ登録されたのみで検体の測定が開始されていなければ、“状態”の項目は“Pending”となり、後述のように、検体ラックLが排出されると“Error”となり、検体に対する測定が終了すると“状態”の項目がブランクとなる。“ラック番号−位置”の項目は、検体ラックLを識別するための番号と、検体容器Tの保持位置を示す。各ラック番号には、検体ラックLのバーコードラベルBL2に関する情報が対応づけられている。“検体番号”の項目は、検体容器Tを識別するための番号を示す。各“検体番号”には、検体容器TのバーコードラベルBL1に関する情報が対応づけられている。“日付”と“時刻”の項目は、検体が測定装置2に取り込まれた日時を示す。“PT%”の項目には、測定が正常に終了すると測定結果が書き込まれ、測定が正常に終了していないと“****.*”(マスク)が書き込まれる。なお、“PT%”とは測定項目の一種であり、ジョブリストには、この他にも測定項目が含まれている。
【0120】
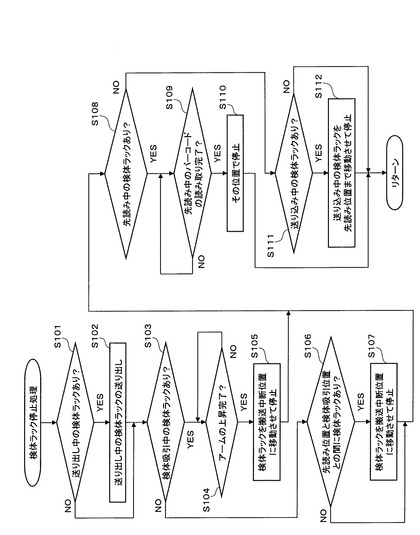
図16は、図11(b)に示す中断・再開処理における“検体ラック停止処理”の処理フローを示す図である。
【0121】
搬送中断事由の発生時に、検体ラックLの全ての検体容器Tついて検体の吸引が終了し、ラック収容領域Cに向けて搬送中の検体ラックLがあるとき(S101:YES)、かかる検体ラックLは、ラック収容領域Cまで搬送される(S102)。
【0122】
検体吸引位置52または53において、検体の吸引が行われている検体ラックLがあるとき(S103:YES)、検体分注ユニット21または22のアームが上昇される。検体分注ユニット21または22のアームの上昇が完了すると(S104:YES)、検体ラックLは、図4で示した搬送中断位置に移動され、その位置で停止される(S105)。なお、検体ラックLが搬送中断位置に移動されたことはセンサB55により検出することができる。
【0123】
また、検体吸引位置52または53において、検体の吸引が行われている検体ラックLがない場合(S103:NO)、先読み位置と、検体吸引位置52または53との間に検体ラックLがあると(S106:YES)、かかる検体ラックLは、搬送中断位置に移動され、その位置で停止される(S107)。すなわち、検体ラックLの先読みが終了して、検体吸引位置52または53に向けて搬送中の検体ラックLは、搬送中断位置に位置づけられる。
【0124】
先読み位置に先読み中の検体ラックLがあるとき(S108:YES)、現在先読みが行われている検体容器Tまたは検体ラックLのバーコード読み取りが完了するまで待機される。先読み中の検体容器Tまたは検体ラックLのバーコード読み取りが完了すると(S109:YES)、検体ラックLはその位置で停止される(S110)。
【0125】
また、先読み位置に先読み中の検体ラックLがない場合(S108:NO)、ラックセット領域Aにおいてラック送込機構A1により送り込み中の検体ラックL、または搬送領域Bにおいて先読み位置まで搬送中の検体ラックLがあると(S111:YES)、かかる検体ラックLは、先読み位置まで搬送されて、先読み位置で停止される(S112)。なお、検体ラックLが先読み位置に搬送されたことはセンサB52により検出することができる。このようにして、“検体ラック停止処理”が終了する。
【0126】
なお、S105、S107、S110、S112において検体ラックLが停止された後、搬送動作が再開されるまでの間は、図5で示したラック横送り機構B2の係合爪B32aが、検体ラックLに係合した状態に維持される。また、かかる停止期間中は、検体ラックLの位置ずれが抑制されるよう、ステッピングモータB43に励磁がかけ続けられる。これにより、不具合なく検体ラックLの搬送動作を再開させることが可能となる。
【0127】
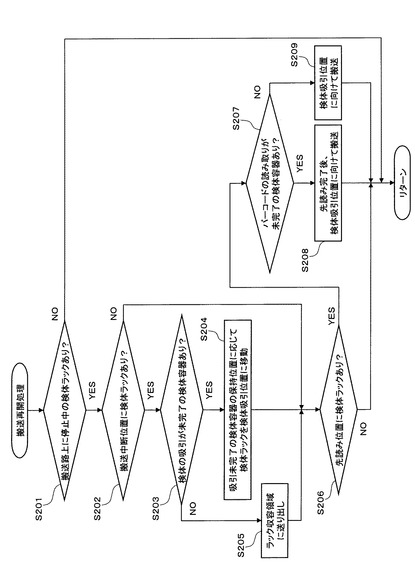
図17は、図11に示す中断・再開処理における“搬送再開処理”の処理フローを示す図である。
【0128】
S201では、搬送領域Bの搬送路B1上に停止中の検体ラックがあるかが判定される。搬送路B1上に停止中の検体ラックがあると(S201:YES)、搬送中断位置に検体ラックLがあるかが判定される(S202)。搬送路B1上に停止中の検体ラックがないと(S201:NO)、処理フローが終了する。
【0129】
搬送中断位置に検体ラックLがあると(S202:YES)、かかる検体ラックLに検体の吸引が未完了の検体容器Tがあるかが判定される(S203)。搬送中断位置に検体ラックLがないと(S202:NO)、S206に処理が進められる。
【0130】
検体ラックLに検体の吸引が未完了の検体容器Tがあると(S203:YES)、搬送制御リストが参照されることにより、吸引が未完了である検体容器Tの保持位置に応じて、且つ、かかる検体容器Tの検体が標準測定されるか微量測定されるかに基づき、検体ラックLが検体吸引位置52または53に移動される(S204)。検体ラックLに検体の吸引が未完了の検体容器Tがないと(S203:NO)、かかる検体ラックLは、ラック収容領域Cに送り出される(S205)。このように、S204では、既に吸引が完了した検体容器Tについては吸引を行わず、吸引が未完了の検体容器Tに対してのみ吸引が行われる。
【0131】
先読み位置に検体ラックLがあると(S206:YES)、バーコードリーダ51によるバーコードの読み取りが未完了の検体容器Tがあるかが判定される(S207)。先読み位置に検体ラックLがないと(S206:NO)、処理フローが終了する。
【0132】
バーコードリーダ51によるバーコードの読み取りが未完了の検体容器Tがあると(S207:YES)、搬送制御リストが参照されることにより、バーコードの読み取りが未完了である検体容器Tのバーコード読み取りが行われる。なお、検体ラックLの読み取りが未完了である場合も、検体ラックLのバーコード読み取りが行われる。かかる読み取り作業が完了した後、検体吸引位置52または53に向けて搬送される(S208)。バーコードリーダ51によるバーコードの読み取りが未完了の検体容器Tがないと(S207:NO)、検体吸引位置52または53に向けて検体ラックLが搬送される(S209)。このように、S208では、既に読み取りが完了したバーコードラベルについては読み取りを行わず、読み取りが未完了のバーコードラベルに対してのみ読み取りが行われる。
【0133】
以上のようにして、“搬送再開処理”が終了する。
【0134】
図18(a)は、測定装置2と情報処理装置3で行われる検体ラックLの排出処理の処理フローを示す図である。
【0135】
本実施の形態では、操作者が図9に示した検体ラック排出ボタン431を押下することによって排出指示信号が情報処理装置3から測定装置2に送信されると、搬送中の検体ラックLがラック収容領域Cに排出される。また、所定の自動排出事由が検出された場合、すなわち、検体分注ユニット21、22と試薬分注ユニット23〜25の動作異常が検出された場合、測定ユニット駆動部237の空圧源からの圧力供給異常が検出された場合、各テーブル(試薬テーブル11、12、キュベットテーブル15、加温テーブル16)の動作異常が検出された場合、センサ部236により本体カバー29が開いていることが検出された場合、温度検出部231により加温テーブル16の温度異常が検出された場合にも、搬送中の検体ラックLがラック収容領域Cに排出される。
【0136】
図18(a)を参照して、情報処理装置3のCPU301は、測定装置2から、上記自動排出事由を検出したことを示す信号(自動排出信号)を受信すると(S41:YES)、検体ラックLが排出される旨の表示を情報処理装置3の表示部320に表示させる(S44)。また、情報処理装置3のCPU301は、操作者により検体ラック排出ボタン431が押されると(S42:YES)、排出指示信号を測定装置2に送信する(S43)。その後、CPU301は、検体ラックLが排出される旨の表示を情報処理装置3の表示部320に表示させ(S44)、処理を終了する。
【0137】
図18(b)を参照して、測定装置2のCPU201は、上記の自動排出事由を検出すると(S51:YES)、自動排出信号を情報処理装置3に送信し(S52)、“検体ラック排出処理”により検体ラックLを排出する(S53)。また、測定装置2のCPU201は、情報処理装置3から排出指示信号を受信すると(S54:YES)、“検体ラック排出処理”により検体ラックLを排出する(S52)。なお、“検体ラック排出処理”については、図19を参照して説明する。
【0138】
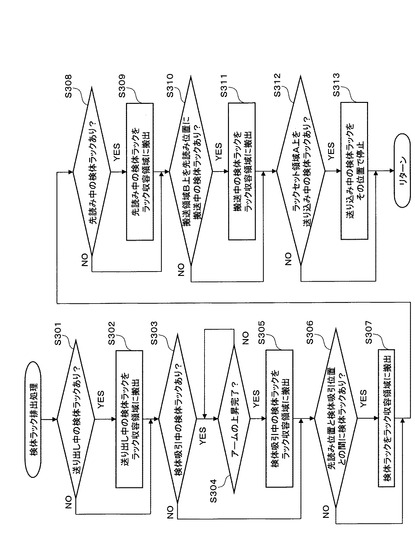
図19は、図18(a)に示す排出処理における“検体ラック排出処理”の処理フローを示す図である。
【0139】
S301では、検体容器Tの検体の吸引が終了し、搬送領域Bからラック収容領域Cに送り出し中の検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S301:YES)、この検体ラックLはラック収容領域Cに搬出される(S302)。かかる検体ラックLがないと判定されると(S301:NO)、S303に処理が進められる。
【0140】
S303では、検体吸引位置52または53において、検体の吸引が行われている検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S303:YES)、検体分注ユニット21または22のアームが上昇される(S304)。検体分注ユニット21または22のアームの上昇が完了すると(S304:YES)、検体の吸引が行われていた検体ラックLが、搬送領域Bに沿って左方向(X軸正方向)に搬送され、ラック収容領域Cに搬出される(S305)。また、吸引中の検体ラックLがないと判定されると(S303:NO)、S306に処理が進められる。
【0141】
S306では、先読みが終了した後、先読み位置と、検体吸引位置52または53の間に位置づけられた検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S306:YES)、かかる検体ラックLが、搬送領域Bに沿って左(X軸正方向)に搬送され、ラック収容領域Cに搬出される(S307)。また、先読み位置と、検体吸引位置52または53の間に検体ラックがないと判定されると(S306:NO)、S308に処理が進められる。
【0142】
S308では、先読み中の検体ラックLがあるかが判定される。先読み中の検体ラックLがあると判定されると(S308:YES)、先読み中の検体ラックが、先読み動作が終了する前に搬送領域Bに沿って左方向に搬送され、ラック収容領域Cに送り出される(S309)。また、先読み中の検体ラックLがないと判定されると(S308:NO)、S310に処理が進められる。
【0143】
S310では、搬送領域B上を先読み位置に向けて搬送されている検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S310:YES)、かかる検体ラックLは、バーコードの読み取り、および、検体の吸引が行われることなく、ラック収容領域Cに搬出される(S311)。かかる検体ラックLがないと判定されると(S310:NO)、S312に処理が進められる。なお、ラックセット領域Aから搬送領域Bの右端に検体ラックLが送り込まれてから当該検体ラックLが先読み位置に向けて搬送開始されるまでの状態の場合も、S310において、YESと判定される。
【0144】
S312では、ラックセット領域A上を搬送領域Bの右端に向けて送り込み中の検体ラックLがあるかが判定される。かかる検体ラックLがあると判定されると(S312:YES)、かかる検体ラックLは、その位置で停止され(S313)、“検体ラック排出処理”が終了する。また、かかる検体ラックLがないと判定されると(S312:NO)、“検体ラック排出処理”が終了する。
【0145】
以上の処理により強制排出された検体ラックLに保持された検体容器Tのうち、検体の吸引が行われた検体容器Tについては、図15で示したジョブリストの“状態”の項目が、Pendingからブランクに書き替えられる。また、先読みは行われたが検体の吸引が行われずに強制排出された検体容器Tについては、図15で示したジョブリストの“状態”の項目はErrorとなり、測定項目がマスクとされる。
【0146】
図18(c)は、ジョブリスト表示処理の処理フローを示す図である。
【0147】
操作者が、情報処理装置3を介してジョブリストの表示を指示すると(S61:YES)、情報処理装置3の表示部320にジョブリストを示す画面が表示される(S62)。
【0148】
以上、本実施の形態によれば、検体ラックLの搬送動作が中断されると、図16に示した“検体ラック停止処理”に従って検体ラックLの搬送が停止される。しかる後、図17に示した“搬送再開処理”に従って検体ラックLの搬送が再開される。これにより、検体ラックLの搬送が停止された場合でも、操作者は、搬送経路上で停止した検体ラックLを初期位置(ラックセット領域A)に戻す必要がなくなるため、操作者の負担が軽減されながら、検体ラックLの搬送動作が再開され得る。
【0149】
また、本実施の形態によれば、搬送動作の中断期間中において、ラック横送り機構B2の係合爪B32aが検体ラックLの凹部Laに係合しているため、かかる中断期間中に、検体ラックLが搬送路Bから外れるのを抑止することができる。また、かかる中断期間中は、ステッピングモータB43に励磁がかけ続けられるため、検体ラックLが移動されるのが抑制され得る。これにより、検体ラックLの搬送動作が不具合なく再開され得る。
【0150】
また、図13に示したように、搬送再開に先立って検体ラックLの位置を搬送停止時の位置に戻すようにすれば、搬送中断中に、何らかの要因により検体ラックLの位置が変化したとしても、不具合なく検体ラックLの搬送が再開され得る。
【0151】
また、本実施の形態によれば、搬送動作の中断に応じて、検体ラックLが蓋部55に覆われた領域に位置づけられるため、搬送動作の中断期間中に、操作者が検体ラックLに接触することが抑制され得る。
【0152】
また、本実施の形態によれば、搬送動作の中断原因が生じると、所定位置(搬送中断位置または先読み位置)に検体ラックLを移動させた後に検体ラックLを停止させ、上記所定位置から検体ラックLの搬送動作を再開しているため、検体ラックLを初期位置(ラックセット領域A)などに一旦移動させてから搬送動作を再開させるといった複雑な制御を伴うことなく、より簡易に搬送動作を再開させることができる。
【0153】
また、本実施の形態によれば、検体の吸引中に搬送動作が中断されると、検体分注ユニット21、22のピペットが検体容器Tから抜き出された後に、検体ラックLが搬送中断位置に移動されるため、検体ラックLが搬送中断位置に移動される際に、検体分注ユニット21、22のピペットと検体容器Tおよび検体ラックLとの接触が回避される。
【0154】
また、本実施の形態によれば、搬送動作の再開時には、搬送制御リストの吸引状況に基づいて、検体の吸引が未完了である検体容器Tについてのみ検体の吸引が行われ、既に検体の吸引が完了している検体容器Tについては検体の吸引が行われないため、効率的に搬送動作が再開され得る。
【0155】
また、本実施の形態によれば、搬送動作の再開時には、搬送制御リストに基づいて、先読みが行われていない検体容器Tについてのみ先読みが行われ、既に先読みが行われた検体容器Tについては先読みが行われないため、迅速に検体ラックLを検体吸引位置52、53へと搬送され得る。
【0156】
以上、本発明の実施形態ついて説明したが、本発明は、上記実施形態に制限されるものではなく、また、本発明の実施形態も上記以外に種々の変更が可能である。
【0157】
たとえば、上記実施の形態では、搬送動作の中断原因が生じると、所定位置(搬送中断位置または先読み位置)に検体ラックLを移動させた後に検体ラックLを停止させているが、本発明はこれに限定されない。搬送中断原因が生じた時点での位置に検体ラックLを停止させてもよく、例えば搬送中断原因が生じた時に検体ラックLが搬送中断位置と先読み位置との間に位置している場合には、その位置に検体ラックLを停止させてもよい。この場合、センサによって正確な位置が認識し得る搬送中断位置または先読み位置に検体ラックLを一旦移動させ、その位置から検体ラックLの搬送動作を再開させてもよい。このようにすれば、より簡易な制御で検体ラックLの搬送動作を再開させることができる。
【0158】
また、上記実施の形態では、操作者による測定再開指示があった場合に、検体ラックLの搬送動作を再開させているが、本発明はこれに限定されず、上述の自動中断事由(キュベット不足、試薬不足など)が解消されたことを検出すると、自動的に検体ラックLの搬送動作を再開させてもよい。
【0159】
また、上記実施の形態では、検体処理装置1を血液凝固分析装置としたが、これに限定されるものではない。検体処理装置1は、例えば、血清を測定する免疫分析装置、全血中の血球を計数する血球計数装置、尿を測定する尿分析装置、又は骨髄液を分析する分析装置とすることもできる。
【0160】
また、上記実施の形態では、検体処理部として、検体の測定を行う測定ユニット10が用いられたが、検体処理部は、検体をスライドガラスに塗沫して塗沫標本を作製する塗沫標本作製ユニットであっても良い。
【0161】
また、上記実施の形態では、検体ラックLの搬送が中断されたときに、ラック横送り機構B2の係合爪B32aが、図5(c)、(d)に示したように、検体ラックLに係合された状態で、ステッピングモータB43に励磁がかけ続けられ、これにより検体ラックLの移動が抑制された。しかしながら、これに替えて、検体ラックLの搬送が中断されたときに、検体ラックLを搬送領域Bの所定領域に固定するためのロック機構が別途設けられても良い。
【0162】
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
【符号の説明】
【0163】
1 … 検体処理装置
3 … 情報処理装置
10 … 測定ユニット
21c、22c … ピペット
50 … 搬送ユニット
51 … バーコードリーダ
55 … 蓋部
200 … 制御部
221 … ラック横送り機構ステッピングモータ部
223 … モータ駆動回路
232 … 試薬残量検出部
233 … 液量検出部
234 … キュベット貯留量検出部
235 … ラック検出部
303 … RAM
304 … ハードディスク
320 … 表示部
B3 … 係合ユニット
B4 … 移動機構
B34 … エアシリンダ
【特許請求の範囲】
【請求項1】
検体取込位置に位置づけられた検体容器から検体を取り込んで所定の処理を行うための検体処理部と、
検体容器を保持可能な検体ラックを前記検体取込位置に向けて搬送するための搬送部と、
前記検体ラックの搬送動作中に搬送中断原因が生じると、前記搬送部による前記検体ラックの搬送を停止させる停止処理を実行し、前記停止処理により前記検体ラックが停止した停止位置から、前記搬送部による前記検体ラックの搬送動作を再開させる搬送制御手段と、
を備える検体処理装置。
【請求項2】
前記搬送部は、
前記検体ラックと係合するよう駆動される係合機構と、
前記係合機構を駆動する係合駆動部と、
前記検体ラックに係合した前記係合機構を前記搬送方向に移動させるための移動機構と、
前記移動機構を駆動するモータと、
前記モータを駆動するモータ駆動部と、を備え、
前記搬送制御手段は、前記搬送動作の中断中、前記係合機構が前記検体ラックに係合した状態で前記モータに励磁がかけ続けられるように、前記係合駆動部および前記モータ駆動部を制御する、
請求項1に記載の検体処理装置。
【請求項3】
前記搬送制御手段は、搬送経路上における前記検体ラックの位置に関する情報を取得し、前記停止位置に関する情報と、前記再開時における前記検体ラックの位置に関する情報とに基づいて、前記搬送部に前記検体ラックの搬送動作を再開させる、
請求項1または2に記載の検体処理装置。
【請求項4】
前記搬送部は、
前記検体ラックと係合するよう駆動される係合機構と、
前記係合機構を駆動するための係合駆動部と、を有し、
前記搬送制御手段は、前記搬送動作の中断中、前記係合機構が前記検体ラックに係合した状態を維持するよう、前記係合駆動部を制御する、
請求項1〜3の何れか一項に記載の検体処理装置。
【請求項5】
前記搬送制御手段は、前記停止処理として、前記搬送中断原因が生じた時点における前記検体ラックの位置から所定位置に前記検体ラックを搬送した後、前記検体ラックを停止させる処理を実行する、
請求項1〜4の何れか一項に記載の検体処理装置。
【請求項6】
前記搬送部は、前記検体ラックの搬送経路の一部を覆うための蓋部を備え、
前記所定位置は、前記蓋部で覆われた位置である、
請求項5に記載の検体処理装置。
【請求項7】
前記検体処理部は、前記検体ラックに保持された検体容器から検体を吸引するためのピペットを含み、
前記搬送制御手段は、検体容器内に前記ピペットが挿入されているときに前記搬送中断原因が生じると、前記ピペットが当該検体容器から取り出された後に、前記検体ラックを前記所定位置に搬送させる、
請求項5または6に記載の検体処理装置。
【請求項8】
前記検体ラックは複数の検体容器を保持可能であり、
前記搬送制御手段は、前記検体ラックに保持された検体容器が前記検体取込位置に位置しているときに前記搬送中断原因が生じた場合には、搬送動作の再開時において、既に検体の取り込みが完了した検体容器は前記検体取込位置に移動させず、未だ検体の取り込みが完了していない検体容器を前記検体取込位置に移動させるよう、前記搬送部による搬送動作を制御する、
請求項1〜7の何れか一項に記載の検体処理装置。
【請求項9】
前記検体ラックに保持された各検体容器に対する検体の取込状況を記憶する記憶部をさらに備え、
前記搬送制御手段は、前記記憶部に記憶された前記取込状況に基づいて、前記搬送部による搬送再開動作を制御する、
請求項8に記載の検体処理装置。
【請求項10】
前記検体ラックは複数の検体容器を保持可能であり、
前記検体取込位置に向かう搬送経路の途中において前記検体ラックに保持された各検体容器の識別情報を読み取る識別情報読取部をさらに備え、
前記搬送制御手段は、前記検体ラックに保持された全ての検体容器について識別情報の読み取りが完了した後に前記搬送中断原因が生じた場合、搬送動作の再開時において、前記検体ラックを、前記識別情報読取部による読取位置に戻すことなく、前記検体取込位置に向けて搬送するよう、前記搬送部を制御する、
請求項1〜9の何れか一項に記載の検体処理装置。
【請求項11】
前記搬送制御手段は、前記識別情報読取部による前記識別情報の読み取り動作の途中で前記搬送中断原因が生じた場合、搬送動作の再開時において、前記検体ラックに保持された残り全ての検体容器に対する識別情報の読み取りが完了した後に、前記検体ラックを前記検体取込位置に向けて搬送するよう、前記搬送部を制御する、
請求項10に記載の検体処理装置。
【請求項12】
前記搬送部の搬送動作が中断された場合に、搬送途上にある前記検体ラックを操作者が搬送動作の再開のために移動させる必要がない旨を通知する通知手段をさらに備える、
請求項1〜11の何れか一項に記載の検体処理装置。
【請求項13】
前記検体処理部に用いられる試薬の残量が所定量未満であること、前記検体処理部に用いられるキュベットの残量が所定量未満であること、前記検体処理部に用いられる洗浄水の残量が所定量未満であること、および、前記搬送部に所定数以上の検体ラックが貯留されていること、の少なくとも一つを検出する検出手段を備え、
前記搬送中断原因は、前記検出手段が前記検出を行ったことを含む、
請求項1〜12の何れか一項に記載の検体処理装置。
【請求項14】
前記搬送部の搬送動作の中断指示を受け付ける受付手段を備え、
前記搬送中断原因は、前記受付手段が前記中断指示を受け付けたことを含む、
請求項1〜13の何れか一項に記載の検体処理装置。
【請求項1】
検体取込位置に位置づけられた検体容器から検体を取り込んで所定の処理を行うための検体処理部と、
検体容器を保持可能な検体ラックを前記検体取込位置に向けて搬送するための搬送部と、
前記検体ラックの搬送動作中に搬送中断原因が生じると、前記搬送部による前記検体ラックの搬送を停止させる停止処理を実行し、前記停止処理により前記検体ラックが停止した停止位置から、前記搬送部による前記検体ラックの搬送動作を再開させる搬送制御手段と、
を備える検体処理装置。
【請求項2】
前記搬送部は、
前記検体ラックと係合するよう駆動される係合機構と、
前記係合機構を駆動する係合駆動部と、
前記検体ラックに係合した前記係合機構を前記搬送方向に移動させるための移動機構と、
前記移動機構を駆動するモータと、
前記モータを駆動するモータ駆動部と、を備え、
前記搬送制御手段は、前記搬送動作の中断中、前記係合機構が前記検体ラックに係合した状態で前記モータに励磁がかけ続けられるように、前記係合駆動部および前記モータ駆動部を制御する、
請求項1に記載の検体処理装置。
【請求項3】
前記搬送制御手段は、搬送経路上における前記検体ラックの位置に関する情報を取得し、前記停止位置に関する情報と、前記再開時における前記検体ラックの位置に関する情報とに基づいて、前記搬送部に前記検体ラックの搬送動作を再開させる、
請求項1または2に記載の検体処理装置。
【請求項4】
前記搬送部は、
前記検体ラックと係合するよう駆動される係合機構と、
前記係合機構を駆動するための係合駆動部と、を有し、
前記搬送制御手段は、前記搬送動作の中断中、前記係合機構が前記検体ラックに係合した状態を維持するよう、前記係合駆動部を制御する、
請求項1〜3の何れか一項に記載の検体処理装置。
【請求項5】
前記搬送制御手段は、前記停止処理として、前記搬送中断原因が生じた時点における前記検体ラックの位置から所定位置に前記検体ラックを搬送した後、前記検体ラックを停止させる処理を実行する、
請求項1〜4の何れか一項に記載の検体処理装置。
【請求項6】
前記搬送部は、前記検体ラックの搬送経路の一部を覆うための蓋部を備え、
前記所定位置は、前記蓋部で覆われた位置である、
請求項5に記載の検体処理装置。
【請求項7】
前記検体処理部は、前記検体ラックに保持された検体容器から検体を吸引するためのピペットを含み、
前記搬送制御手段は、検体容器内に前記ピペットが挿入されているときに前記搬送中断原因が生じると、前記ピペットが当該検体容器から取り出された後に、前記検体ラックを前記所定位置に搬送させる、
請求項5または6に記載の検体処理装置。
【請求項8】
前記検体ラックは複数の検体容器を保持可能であり、
前記搬送制御手段は、前記検体ラックに保持された検体容器が前記検体取込位置に位置しているときに前記搬送中断原因が生じた場合には、搬送動作の再開時において、既に検体の取り込みが完了した検体容器は前記検体取込位置に移動させず、未だ検体の取り込みが完了していない検体容器を前記検体取込位置に移動させるよう、前記搬送部による搬送動作を制御する、
請求項1〜7の何れか一項に記載の検体処理装置。
【請求項9】
前記検体ラックに保持された各検体容器に対する検体の取込状況を記憶する記憶部をさらに備え、
前記搬送制御手段は、前記記憶部に記憶された前記取込状況に基づいて、前記搬送部による搬送再開動作を制御する、
請求項8に記載の検体処理装置。
【請求項10】
前記検体ラックは複数の検体容器を保持可能であり、
前記検体取込位置に向かう搬送経路の途中において前記検体ラックに保持された各検体容器の識別情報を読み取る識別情報読取部をさらに備え、
前記搬送制御手段は、前記検体ラックに保持された全ての検体容器について識別情報の読み取りが完了した後に前記搬送中断原因が生じた場合、搬送動作の再開時において、前記検体ラックを、前記識別情報読取部による読取位置に戻すことなく、前記検体取込位置に向けて搬送するよう、前記搬送部を制御する、
請求項1〜9の何れか一項に記載の検体処理装置。
【請求項11】
前記搬送制御手段は、前記識別情報読取部による前記識別情報の読み取り動作の途中で前記搬送中断原因が生じた場合、搬送動作の再開時において、前記検体ラックに保持された残り全ての検体容器に対する識別情報の読み取りが完了した後に、前記検体ラックを前記検体取込位置に向けて搬送するよう、前記搬送部を制御する、
請求項10に記載の検体処理装置。
【請求項12】
前記搬送部の搬送動作が中断された場合に、搬送途上にある前記検体ラックを操作者が搬送動作の再開のために移動させる必要がない旨を通知する通知手段をさらに備える、
請求項1〜11の何れか一項に記載の検体処理装置。
【請求項13】
前記検体処理部に用いられる試薬の残量が所定量未満であること、前記検体処理部に用いられるキュベットの残量が所定量未満であること、前記検体処理部に用いられる洗浄水の残量が所定量未満であること、および、前記搬送部に所定数以上の検体ラックが貯留されていること、の少なくとも一つを検出する検出手段を備え、
前記搬送中断原因は、前記検出手段が前記検出を行ったことを含む、
請求項1〜12の何れか一項に記載の検体処理装置。
【請求項14】
前記搬送部の搬送動作の中断指示を受け付ける受付手段を備え、
前記搬送中断原因は、前記受付手段が前記中断指示を受け付けたことを含む、
請求項1〜13の何れか一項に記載の検体処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2011−64588(P2011−64588A)
【公開日】平成23年3月31日(2011.3.31)
【国際特許分類】
【出願番号】特願2009−215900(P2009−215900)
【出願日】平成21年9月17日(2009.9.17)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
【公開日】平成23年3月31日(2011.3.31)
【国際特許分類】
【出願日】平成21年9月17日(2009.9.17)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
[ Back to top ]