
検体分析装置および検体分析方法
【課題】装置の構造を簡略化するとともに、試薬容器に収容された試薬の攪拌を効果的に行うことが可能な検体分析装置を提供する。
【解決手段】この分析装置1(検体分析装置)は、R2試薬を収容したR2試薬容器110を保持する外側テーブル164と、R2試薬容器110からR2試薬を吸引するR2試薬分注アーム7と、R2試薬と検体とから調製された測定試料を分析する検出部14と、外側テーブル164を回転移動させる第2ステッピングモータ164aと、R2試薬を吸引するときには、R2試薬容器110をR2試薬吸引位置P2に位置づけるために外側テーブル164を一方方向に回転移動させ、R2試薬を吸引しないときには、加速と減速とを交互に繰り返しながら外側テーブル164を一方方向へ回転移動させるように、第2ステッピングモータ164aを制御するCPU2bとを備える。
【解決手段】この分析装置1(検体分析装置)は、R2試薬を収容したR2試薬容器110を保持する外側テーブル164と、R2試薬容器110からR2試薬を吸引するR2試薬分注アーム7と、R2試薬と検体とから調製された測定試料を分析する検出部14と、外側テーブル164を回転移動させる第2ステッピングモータ164aと、R2試薬を吸引するときには、R2試薬容器110をR2試薬吸引位置P2に位置づけるために外側テーブル164を一方方向に回転移動させ、R2試薬を吸引しないときには、加速と減速とを交互に繰り返しながら外側テーブル164を一方方向へ回転移動させるように、第2ステッピングモータ164aを制御するCPU2bとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検体分析装置および検体分析方法に関し、特に、試薬を攪拌するための機構を備えた検体分析装置および検体分析方法に関する。
【背景技術】
【0002】
従来、試薬を攪拌するための機構を備えた検体分析装置が知られている(例えば、特許文献1参照)。
【0003】
上記特許文献1に記載の検体分析装置は、試薬容器を円環状に載置したターンテーブルを回転させることによって、試薬容器をターンテーブルの回転中心の周りに公転させるとともに、試薬容器そのものをターンテーブルの上で自転させることによって試薬に含まれる微小粒子を均一に分散させる攪拌機構を備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−196006号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の検体分析装置の攪拌機構では、試薬容器の自転を行うための構造が必要となるため、装置の構造が複雑化するという問題点がある。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、装置の構造を簡略化するとともに、試薬容器に収容された試薬の攪拌を効果的に行うことが可能な検体分析装置および検体分析方法を提供することである。
【課題を解決するための手段および発明の効果】
【0007】
上記目的を達成するために、この発明の第1の局面における検体分析装置は、回転軸を中心に水平回転可能に構成され、試薬を収容した試薬容器を保持するための試薬容器保持部と、試薬容器保持部に保持された試薬容器から試薬を吸引する試薬吸引部と、試薬吸引部に吸引された試薬と検体とから調製された測定試料を分析する分析部と、試薬容器保持部を回転軸を中心として回転移動させる駆動部と、試薬容器から試薬を吸引するときには、試薬容器を試薬吸引部による試薬吸引位置に位置づけるために試薬容器保持部を一方方向に回転移動させ、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させるように、駆動部を制御する駆動制御部とを備える。
【0008】
この発明の第1の局面による検体分析装置では、上記のように、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させるように、駆動制御部が駆動部を制御することによって、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させるだけで、試薬容器内の試薬の攪拌を行うことができる。すなわち、加速と減速とを交互に繰り返しながら試薬容器保持部を回転移動させた場合には、試薬容器内の試薬は慣性によって回転移動の加速前および減速前の速さを維持しようとするため、試薬容器の速さの変化によって試薬容器内の試薬を試薬容器に対して相対的に流動させることができる。この試薬の流動に伴い、試薬の攪拌が効果的に行われる。これにより、試薬容器保持部に試薬容器を自転させる構造を設ける場合と比較して、装置の構造を簡略化することができる。このように本発明の検体分析装置では、装置の構造を簡略化するとともに、試薬容器に収容された試薬の攪拌を効果的に行うことができる。
【0009】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬を吸引しないときには、試薬容器保持部を一方方向に間欠回転移動させるよう、駆動部を制御するように構成されている。このように構成すれば、試薬容器保持部が回転移動と停止とを交互に繰り返す間欠回転移動を行うことによって、比較的低速の回転移動と比較的高速の回転移動との間で加速および減速を行う場合と比べて、容易に、停止時と回転移動時との速さの差を大きくすることができる。つまり、停止状態から回転移動状態への加速および回転移動状態から停止状態への減速とによって、回転移動時の速さを大きくしなくても、容易に加速度および減速度を大きくすることができる。これにより、より容易に、試薬容器内の試薬により大きな慣性力を作用させることができる。
【0010】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬容器から試薬を吸引するときには、第1加速度での加速により試薬容器保持部が一方方向への回転移動を開始し、第1減速度での減速により試薬容器保持部が一方方向への回転移動を停止するよう、駆動部を制御し、試薬を吸引しないときには、第1加速度よりも大きい第2加速度での加速と、第1減速度よりも大きい第2減速度での減速とを交互に繰り返しながら試薬容器保持部が一方方向に回転移動するよう、駆動部を制御する。このように構成すれば、試薬を吸引するときには、第2加速度および第2減速度よりもそれぞれ速さの変化が緩やかな第1加速度および第1減速度により試薬容器保持部を移動させることにより、試薬吸引位置へ移動する際の試薬容器保持部の停止位置を正確に制御することができる。これにより、試薬吸引位置へ試薬容器を精度良く位置づけることができる。また、試薬を吸引しないときには、第1加速度よりも大きい第2加速度での加速と、第1減速度よりも大きい第2減速度での減速とを交互に繰り返しながら試薬容器保持部を回転移動させることによって、試薬容器内の試薬に大きな慣性力を作用させることができ、その結果、試薬容器内の試薬を効果的に移動(流動)させることができるので、試薬の攪拌をさらに効果的に行うことができる。
【0011】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬を吸引しないときには、加速と減速との切り替えを周期的に繰り返すように、駆動部を制御するように構成されている。このように構成すれば、試薬容器保持部の加速と減速との切り替えによって試薬容器内の試薬を効果的に移動(流動)させるとともに、この切り替えを周期的に行うことによって試薬容器内の試薬の流動状態を継続させることができるので、試薬が攪拌された状態を保つことができる。
【0012】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬を吸引しないときには、減速により試薬容器保持部の回転移動が停止するように、駆動部を制御するように構成されている。このように構成すれば、減速により試薬容器保持部の回転移動を停止させる場合には、試薬容器保持部を減速させた結果、駆動部による試薬容器保持部の駆動を停止するように制御すればよいので、駆動部の駆動制御を容易に行うことができる。
【0013】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬を吸引しないときには、駆動部に駆動パルスを印加していない状態から駆動部に所定パルス数の駆動パルスを印加することにより、試薬容器保持部を加速させ、駆動部に所定パルス数の駆動パルスを印加している状態から駆動部への駆動パルスの印加を停止することにより、試薬容器保持部を減速させる。このように構成すれば、駆動パルスを駆動部に印加しない状態と、所定パルス数の駆動パルスを駆動部に印加する状態とを切り替える駆動制御を行うだけで、容易に、試薬容器保持部を加速または減速させることができる。
【0014】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬容器から試薬を吸引するときには、駆動部に印加する駆動パルス数を徐々に増加させることにより、試薬容器保持部の回転移動を加速させ、駆動部に印加する駆動パルス数を徐々に減少させることにより、試薬容器保持部の回転移動を減速させる。このように構成すれば、試薬を吸引するときには、試薬容器保持部の加速時および減速時の速さの変化が緩やかになるように駆動部の駆動制御を行うことができるので、試薬吸引位置へ移動する際の試薬容器保持部の停止位置を正確に制御することができる。これにより、試薬吸引位置へ試薬容器を精度良く位置づけることができる。
【0015】
上記第1の局面による検体分析装置において、好ましくは、試薬容器は、試薬を吸引するための上端開口と上端開口を閉塞するための蓋とを含み、回転軸を中心とした試薬容器保持部の一方方向への水平回転移動を利用して試薬容器の蓋を移動させることにより、試薬容器の上端開口の閉塞動作および開放動作の少なくとも一方を行う蓋移動部をさらに備える。このように構成すれば、試薬容器保持部を一方方向へ回転移動させるだけで、試薬容器の上端開口の閉塞および開放の少なくとも一方を行うことができる。
【0016】
上記第1の局面による検体分析装置において、好ましくは、試薬容器は、磁性粒子を含む試薬を収容する。このように構成すれば、磁性粒子を含む試薬は、磁性粒子を試薬内で均一に拡散させるために攪拌を行う必要があるので、本発明の検体分析装置により試薬容器に収容された試薬の攪拌を行なうことによって、容易に、磁性粒子を試薬内で均一に拡散させることができる。
【0017】
上記第1の局面による検体分析装置において、好ましくは、試薬容器保持部は、回転軸を中心に回転可能に構成され、磁性粒子を含む第1試薬を収容した第1試薬容器を保持するための第1容器保持領域と、回転軸を中心に回転可能に構成され、磁性粒子を含まない第2試薬を収容した第2試薬容器を保持するための第2容器保持領域とを含み、第1容器保持領域は、第1容器保持領域に対する回転軸からの距離が第2容器保持領域に対する回転軸からの距離よりも大きい位置に設けられている。このように構成すれば、攪拌が必要な磁性粒子を含む第1試薬を収容した第1試薬容器を保持するための第1容器保持領域に対する回転軸からの距離(回転半径)を、第2容器保持領域に対する回転軸からの距離(回転半径)よりも大きくすることによって、試薬容器保持部が回転する際の単位回転角度当りの第1容器保持領域(第1試薬容器)の移動距離を大きくすることができる。これにより、第1試薬容器の回転移動の速さをより大きくすることができるので、加速と減速とを繰り返しながら試薬容器保持部を回転移動させる際に、第1容器保持領域(第1試薬容器)の加速度および減速度をより大きくすることができる。その結果、第1試薬容器内の磁性粒子を含む試薬をより効果的に流動させることができるので、試薬の攪拌をより効果的に行うことができる。
【0018】
この場合において、好ましくは、駆動部は、第1容器保持領域を回転させるための第1駆動部と、第2容器保持領域を回転させるための第2駆動部とを含み、駆動制御部は、試薬を吸引しないときには、第1容器保持領域および第2容器保持領域のうち、第1容器保持領域のみが加速と減速とを交互に繰り返しながら一方方向へ回転移動するように、第1駆動部および第2駆動部を制御するように構成されている。このように構成すれば、第1容器保持領域が加速と減速とを交互に繰り返しながら一方方向へ回転移動することによって、攪拌が必要な第1試薬の攪拌を行うことができるとともに、第2容器保持領域では回転移動をさせないでおくことによって、攪拌が不要な第2試薬はそのまま攪拌を行うことなく第2容器保持領域に保持しておくことができる。これにより、攪拌が必要な第1試薬のみを攪拌することができるので、第2試薬に不必要に攪拌を行うことによる試薬品質の低下を防止することができる。
【0019】
上記第1の局面による検体分析装置において、好ましくは、試薬容器保持部は、複数の試薬容器を円環状に保持するように構成されている。このように構成すれば、試薬容器保持部を回転軸を中心に回転させた場合に、円環状に保持された試薬容器が円環のいずれの位置に配置されていても、全ての試薬容器を同じ移動速度で移動させることができる。これにより、試薬容器保持部の速度変化によって試薬容器内の試薬を攪拌させる際に、試薬容器の配置位置によらず、試薬容器保持部に保持された全ての試薬容器を均一に攪拌することができる。
【0020】
この発明の第2の局面における検体分析方法は、回転軸を中心に水平回転可能に構成され、試薬を収容した試薬容器を保持するための試薬容器保持部に、試薬容器を保持させるステップと、試薬容器から試薬を吸引するときには、試薬容器が試薬吸引部による試薬吸引位置に位置づけるために試薬容器保持部を一方方向に回転移動させるステップと、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させるステップと、試薬容器保持部に保持された試薬容器内の試薬と検体とから調製された測定試料を分析するステップとを備える。
【0021】
この第2の局面による検体分析方法では、上記のように、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させることによって、加速と減速とを交互に繰り返しながら試薬容器保持部を回転移動させるだけで、試薬容器内の試薬の攪拌を行うことができる。すなわち、加速と減速とを交互に繰り返しながら試薬容器保持部を回転移動させた場合には、試薬容器内の試薬は慣性によって回転移動の加速前および減速前の速さを維持しようとするため、試薬容器の速さの変化によって試薬容器内の試薬を試薬容器に対して相対的に流動させることができる。この試薬の流動に伴い、試薬の攪拌が効果的に行われる。これにより、試薬容器保持部に試薬容器を自転させる場合と比較して、検体分析に用いる装置の構造を簡略化することができる。このように本発明の検体分析方法では、検体分析に用いる装置の構造を簡略化するとともに、試薬容器に収容された試薬の攪拌を効果的に行うことができる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態による分析装置の全体構成を示した斜視図である。
【図2】図1に示した一実施形態による分析装置の全体構成を示した平面図である。
【図3】図1に示した一実施形態による分析装置の測定機構部を示したブロック図である。
【図4】図1に示した一実施形態による分析装置の測定機構部の制御部を示したブロック図である。
【図5】図1に示した一実施形態による分析装置の制御装置を示したブロック図である。
【図6】図1に示した一実施形態による分析装置の試薬設置部および反応部を示した斜視図である。
【図7】図1に示した一実施形態による分析装置の試薬設置部および反応部を示した斜視図である。
【図8】図7に示した試薬設置部および反応部の配置を模式的に示した平面図である。
【図9】図7に示した試薬設置部の外側テーブルの回転移動に関わる制御的な構成を説明するためのブロック図である。
【図10】図7に示した試薬設置部の外側テーブルによる攪拌動作のための制御を説明するための図である。
【図11】図1に示した一実施形態による分析装置の試薬開閉機構部の構成を説明するための図である。
【図12】図1に示した一実施形態による分析装置に用いられるR2試薬容器の構成を説明するための斜視図である。
【図13】図1に示した一実施形態による分析装置の外側テーブルによる攪拌動作を説明するための図である。
【図14】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するためのフローチャートである。
【図15】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するための図である。
【図16】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するための図である。
【図17】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するための図である。
【図18】図1に示した一実施形態による分析装置の試薬吸引処理動作における密封解除状態を示した断面図である。
【図19】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するための図である。
【図20】図1に示した一実施形態による分析装置の試薬吸引処理動作における密封解除状態を示した断面図である。
【図21】図1に示した一実施形態による分析装置の試薬吸引処理動作における吸引状態を示した断面図である。
【発明を実施するための形態】
【0023】
以下、本発明の実施形態を図面に基づいて説明する。
【0024】
まず、図1〜図12、図15および図18を参照して、本発明の一実施形態による分析装置1の構成について説明する。
【0025】
本発明の一実施形態による分析装置1は、血液などの検体を用いてB型肝炎、C型肝炎、腫瘍マーカおよび甲状腺ホルモンなど種々の項目の検査を行うための装置である。この分析装置1では、測定対象である血液などの検体に含まれる抗原に結合した捕捉抗体(R1試薬)に磁性粒子(R2試薬)を結合させた後に、結合(Bound)した抗原、捕捉抗体および磁性粒子を1次BF(Bound Free)分離部11(図1および図2参照)の磁石(図示せず)に引き寄せることにより、未反応(Free)の捕捉抗体を含むR1試薬を除去する。そして、磁性粒子が結合した抗原と標識抗体(R3試薬)とを結合させた後に、結合(Bound)した磁性粒子、抗原および標識抗体を2次BF分離部12の磁石(図示せず)に引き寄せることにより、未反応(Free)の標識抗体を含むR3試薬を除去する。さらに、分散液(R4試薬)、および、標識抗体との反応過程で発光する発光基質(R5試薬)を添加した後、標識抗体と発光基質との反応によって生じる発光量を測定する。このような過程を経て、標識抗体に結合する検体に含まれる抗原を定量的に測定している。
【0026】
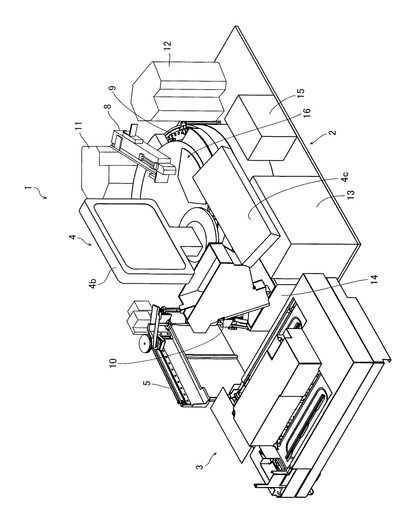
この分析装置1は、図1および図2に示すように、測定機構部2と、測定機構部2に隣接するように配置された検体搬送部(サンプラ)3と、測定機構部2に電気的に接続されたPC(パーソナルコンピュータ)からなる制御装置4とを備えている。
【0027】
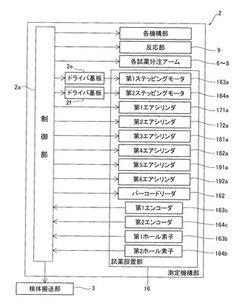
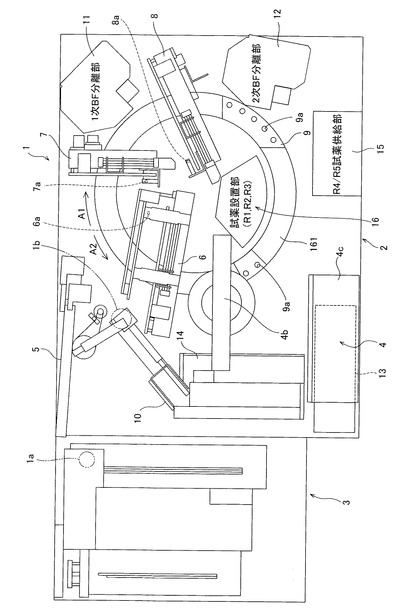
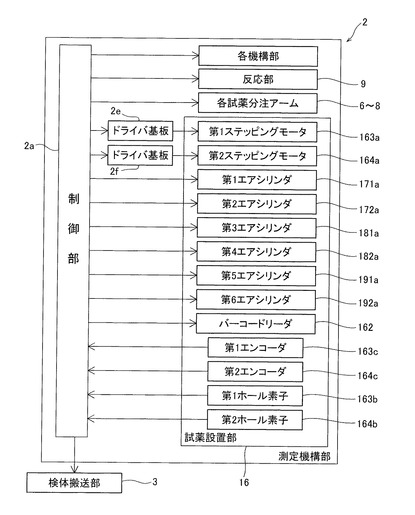
また、測定機構部2は、検体分注アーム5と、R1試薬分注アーム6と、R2試薬分注アーム7と、R3試薬分注アーム8と、反応部9と、キュベット供給部10と、1次BF分離部11と、2次BF分離部12と、ピペットチップ供給部13と、検出部14と、R4/R5試薬供給部15と、試薬設置部16とから構成されている。また、図3に示すように、測定機構部2における各機構(各種分注アーム、反応部9、試薬設置部16など)は、測定機構部2に設けられた制御部2aにより制御されている。また、検体搬送部3も制御部2aによって制御されるように構成されている。
【0028】
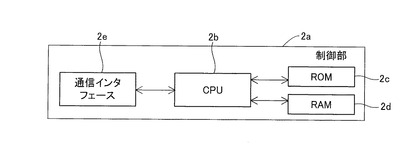
制御部2aは、図4に示すように、CPU2bと、ROM2cと、RAM2dと、通信インタフェース2eとから主として構成されている。CPU2bは、ROM2cに記憶されているコンピュータプログラムおよびRAM2dに読み出されたコンピュータプログラムを実行することが可能である。ROM2cは、CPU2bに実行させるためのコンピュータプログラム及び当該コンピュータプログラムの実行に用いるデータなどを記憶している。RAM2dは、ROM2cに記憶しているコンピュータプログラムの読み出しに用いられる。また、これらのコンピュータプログラムを実行するときに、CPU2bの作業領域として利用される。通信インタフェース2eは、制御装置4に接続されており、検体の光学的な情報(標識抗体と発光基質との反応によって生じる発光量のデータ)を制御装置4に送信するとともに、制御装置4の制御部4aからの信号を受信するための機能を有している。また、通信インタフェース2eは、検体搬送部3および測定機構部2の各部を駆動するためのCPU2bからの指令を送信するための機能を有している。
【0029】
検体搬送部3は、検体を収容した複数の試験管が載置されたラックを搬送可能に構成されている。また、検体搬送部3は、検体を収容した試験管を検体分注アーム5による検体吸引位置1a(図2参照)まで搬送するように構成されている。
【0030】
制御装置4は、図5に示すように、制御部4aと、表示部4bと、キーボード4cとから主として構成されたコンピュータ401によって構成されている。
【0031】
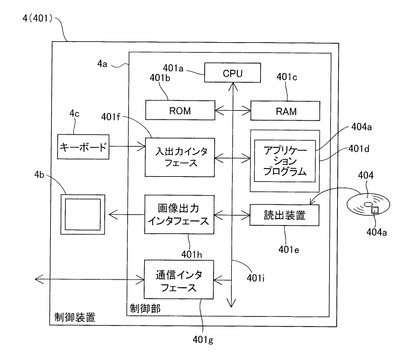
制御部4aは、CPU401aと、ROM401bと、RAM401cと、ハードディスク401dと、読出装置401eと、入出力インタフェース401fと、通信インタフェース401gと、画像出力インタフェース401hとから主として構成されている。CPU401a、ROM401b、RAM401c、ハードディスク401d、読出装置401e、入出力インタフェース401f、通信インタフェース401g、および画像出力インタフェース401hは、それぞれ、バス401iによって接続されている。
【0032】
CPU401aは、ROM401bに記憶されているコンピュータプログラムおよびRAM401cにロードされたコンピュータプログラムを実行することが可能である。そして、ハードディスク401dに記憶されたアプリケーションプログラム404aをCPU401aが実行することにより、コンピュータ401が制御装置4として機能する。
【0033】
ROM401bは、マスクROM、PROM、EPROM、EEPROMなどによって構成されており、CPU401aに実行されるコンピュータプログラムおよびこれに用いるデータなどが記録されている。
【0034】
RAM401cは、SRAMまたはDRAMなどによって構成されている。RAM401cは、ROM401bおよびハードディスク401dに記録されているコンピュータプログラムの読み出しに用いられる。また、これらのコンピュータプログラムを実行するときに、CPU401aの作業領域として利用される。
【0035】
ハードディスク401dは、オペレーティングシステムおよびアプリケーションプログラム404aなど、CPU401aに実行させるための種々のコンピュータプログラムおよびそのコンピュータプログラムの実行に用いるデータがインストールされている。
【0036】
読出装置401eは、フレキシブルディスクドライブ、CD−ROMドライブ、またはDVD−ROMドライブなどによって構成されており、可搬型記録媒体404に記録されたコンピュータプログラムまたはデータを読み出すことができる。また、可搬型記録媒体404には、免疫分析用のアプリケーションプログラム404aが格納されており、コンピュータ401がその可搬型記録媒体404からアプリケーションプログラム404aを読み出し、そのアプリケーションプログラム404aをハードディスク401dにインストールすることが可能である。
【0037】
なお、上記アプリケーションプログラム404aは、可搬型記録媒体404によって提供されるのみならず、電気通信回線(有線、無線を問わない)によってコンピュータ401と通信可能に接続された外部の機器から上記電気通信回線を通じて提供することも可能である。たとえば、上記アプリケーションプログラム404aがインターネット上のサーバコンピュータのハードディスク内に格納されており、このサーバコンピュータにコンピュータ401がアクセスして、そのアプリケーションプログラム404aをダウンロードし、これをハードディスク401dにインストールすることも可能である。
【0038】
また、ハードディスク401dには、たとえば、米マイクロソフト社が製造販売するWindows(登録商標)などのグラフィカルユーザインタフェース環境を提供するオペレーティングシステムがインストールされている。
【0039】
入出力インタフェース401fは、たとえば、USB、IEEE1394、RS−232Cなどのシリアルインタフェース、SCSI、IDE、IEEE1284などのパラレルインタフェース、およびD/A変換器、A/D変換器などからなるアナログインタフェースなどから構成されている。入出力インタフェース401fには、キーボード4cが接続されており、ユーザがそのキーボード4cを使用することにより、コンピュータ401にデータを入力することが可能である。
【0040】
通信インタフェース401gは、たとえば、Ethernet(登録商標)インタフェースである。コンピュータ401は、その通信インタフェース401gにより、所定の通信プロトコルを使用して測定機構部2との間でデータの送受信が可能である。
【0041】
画像出力インタフェース401hは、LCDまたはCRTなどで構成された表示部4bに接続されており、CPU401aから与えられた画像データに応じた映像信号を表示部4bに出力するようになっている。
【0042】
表示部4bは、検出部14による検出値に基づいて得られる分析結果などを表示するために設けられている。
【0043】
キュベット供給部10は、複数のキュベットを収納可能に構成されており、検体分注アーム5による検体吐出位置1bにキュベットを1つずつ順次供給する機能を有している。
【0044】
R1試薬分注アーム6は、試薬設置部16に設置されたR1試薬を吸引し、吸引したR1試薬を検体吐出位置1bに載置されたキュベットに分注(吐出)するように構成されている。また、R1試薬分注アーム6には、図2に示すように、R1試薬の吸引および吐出を行うためのピペット6aが取り付けられている。また、R1試薬分注アーム6は、図示しないキャッチャにより検体吐出位置1bに載置されたキュベットを反応部9に移送する機能を有している。
【0045】
ピペットチップ供給部13は、投入された複数のピペットチップ(図示せず)を1つずつ検体分注アーム5によるチップ装着位置まで搬送する機能を有している。そして、ピペットチップは、チップ装着位置において、検体分注アーム5のピペット先端に取り付けられる。
【0046】
検体分注アーム5は、チップ装着位置においてピペットチップを装着した後、検体搬送部3により検体吸引位置1aに搬送された試験管内の検体を吸引し、R1試薬分注アーム6によりR1試薬が分注された検体吐出位置1bのキュベットに検体を分注(吐出)する機能を有している。
【0047】
R2試薬分注アーム7は、試薬設置部16に設置されたR2試薬を吸引する機能を有している。また、R2試薬分注アーム7は、R1試薬および検体を収容するキュベットに吸引したR2試薬を分注(吐出)するように構成されている。また、R2試薬分注アーム7には、図2に示すように、R2試薬の吸引および吐出を行うためのピペット7aが取り付けられている。
【0048】
反応部9は、図1、図2、図6および図7に示すように、平面的に見て円形形状を有する試薬設置部16の周囲を取り囲むように中空の円形形状に形成されている。また、反応部9は、外形に沿って所定間隔に配置された複数のキュベット設置部9aを有し、キュベット設置部9aは、キュベットを挿入可能なように円形形状で凹状に形成されている。また、反応部9は、キュベット設置部9aにセットされたキュベットを約42℃に加温する機能を有している。すなわち、反応部9において、キュベットに収容された試料は約42℃に加温される。これにより、キュベット内の検体と各種試薬との反応が促進される。また、反応部9は、時計回り方向(矢印A1方向)に回転可能に構成されており、キュベット設置部9aにセットされたキュベットを、各種処理(試薬の分注など)が行われるそれぞれの処理位置まで移動させる機能を有している。
【0049】
1次BF分離部11は、検体、R1試薬およびR2試薬を収容するキュベットを図示しないキャッチャにより反応部9から1次BF分離部11に移送した後、キュベット内の試料から未反応のR1試薬(不要成分)と磁性粒子とを分離(B/F分離)するように構成されている。
【0050】
R3試薬分注アーム8は、試薬設置部16に設置されたR3試薬を吸引する機能を有している。また、R3試薬分注アーム8は、1次BF分離部11によるB/F分離後の試料を収容するキュベットが1次BF分離部11から反応部9に移送されると、吸引したR3試薬をそのキュベットに分注(吐出)するように構成されている。また、R3試薬分注アーム8には、図2に示すように、R3試薬の吸引および吐出を行うためのピペット8aが取り付けられている。
【0051】
2次BF分離部12は、1次BF分離部11によるB/F分離後の試料およびR3試薬を収容するキュベットを図示しないキャッチャにより反応部9から2次BF分離部12に移送した後、キュベット内の試料から未反応のR3試薬(不要成分)と磁性粒子とを分離するように構成されている。
【0052】
R4/R5試薬供給部15は、図示しないチューブにより、2次BF分離部12によるB/F分離後の試料を収容するキュベットに、R4試薬およびR5試薬を順に分注するように構成されている。
【0053】
検出部14は、所定の処理が行なわれた検体の抗原に結合する標識抗体と発光基質との反応過程で生じる光を光電子増倍管(Photo Multiplier Tube)で取得することにより、その検体に含まれる抗原の量を測定するために設けられている。
【0054】
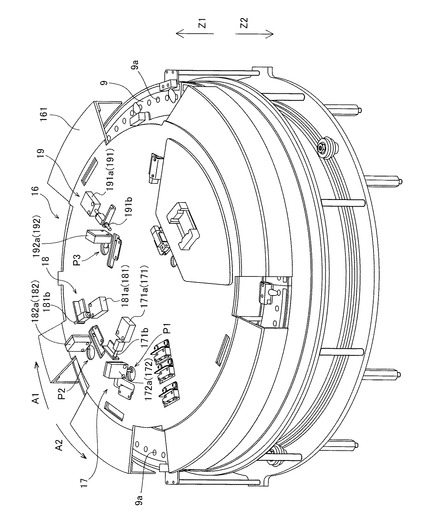
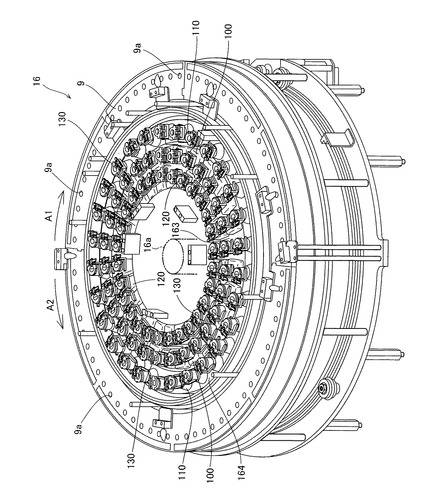
試薬設置部16は、図7に示すように、捕捉抗体を含むR1試薬が収容されるR1試薬容器100、磁性粒子を含むR2試薬が収容されるR2試薬容器110および標識抗体を含むR3試薬が収容されるR3試薬容器120を設置するために設けられている。また、試薬設置部16は、図2および図6に示す円形状のカバー部161と、図3に示すバーコードリーダ162と、図7に示す内側テーブル163および外側テーブル164と、図6に示すR1試薬開閉機構部17、R2試薬開閉機構部18およびR3試薬開閉機構部19とを含んでいる。
【0055】
カバー部161は、図2および図6に示すように、試薬設置部16および反応部9の両方を覆うように配置されている。また、円形状のカバー部161には、所定の箇所に開口部が設けられており、開口部を介してキュベットの移動やピペットによる分注処理が行われる。バーコードリーダ162は、試薬設置部16に設置された各試薬容器100、110、120に貼付されたバーコード(図示せず)を読み取る機能を有している。バーコードには、各試薬固有の情報が含まれている。なお、バーコードリーダ162によるバーコード読み取り動作は、分析装置1の初期化を行った際に、測定機構部2の各部の動作チェック、および、後述するテーブル163、164の原点出しを行った後に実行される。そして、バーコードリーダ162により読み取られた情報は、テーブル163、164上での試薬容器の位置情報と関連付けられて、制御装置4のハードディスク401dに記憶される。
【0056】
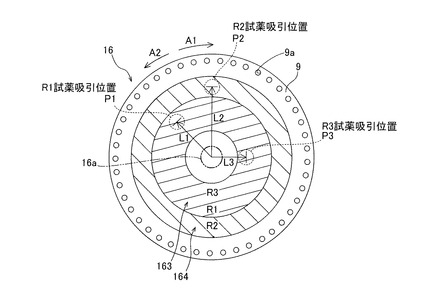
内側テーブル163は、図7に示すように、複数のR1試薬容器100および複数のR3試薬容器120を保持可能に構成されており、平面的に見て中空の円環状に形成されている。内側テーブル163上のR1試薬容器100は、円環状に配列されたR3試薬容器120の外側を取り囲むように円環状に配列されている。また、R1試薬容器100は、半径方向にR3試薬容器120に隣接して配置されている。つまり、図8に示すように、内側テーブル163において、円環状に保持されたR1試薬容器100に対する後述する回転軸16a(内側テーブル163の中央)からの距離L1は、R3試薬容器120に対する回転軸16a(内側テーブル163の中央)からの距離L3よりも大きい。また、内側テーブル163は、回転軸16aを中心に時計回り方向(矢印A1方向)および反時計回り方向(矢印A2方向)に水平に回転可能に構成されている。具体的には、内側テーブル163は、ドライバ基板2e(図3参照)を介して制御部2aにより制御される第1ステッピングモータ163a(図3参照)によって回転軸16aを中心に回転されるように構成されている。内側テーブル163が回転(回動)されると、R1試薬容器100およびR3試薬容器120は互いに同方向に同角度回転(回動)される。これにより、内側テーブル163は、R1試薬を収容するR1試薬容器100およびR3試薬を収容するR3試薬容器120を、それぞれ所定のR1試薬吸引位置P1およびR3試薬吸引位置P3に移動させるように構成されている。
【0057】
また、内側テーブル163の所定の位置には、試薬設置部16に取り付けられた磁石(図示せず)を検知する磁気センサからなる第1ホール素子163b(図3参照)が設けられている。また、第1ステッピングモータ163aの回転軸には、モータの回転角度を検知する光学センサからなる第1エンコーダ163cが設けられている。これらの第1ホール素子163bおよび第1エンコーダ163cを用いて、内側テーブル163の原点出し(原点の位置合わせ)が行われる。
【0058】
外側テーブル164は、図7および図8に示すように、複数のR2試薬容器110を保持可能に構成されており、内側テーブル163の外側を取り囲むように中空の円環状に形成されている。また、外側テーブル164は、内側テーブル163が保持可能なR1試薬容器100およびR3試薬容器120のそれぞれの個数と同じ個数のR2試薬容器110を保持可能に構成されている。外側テーブル164上の複数のR2試薬容器110は、円環状に配列されたR1試薬容器100の外側を取り囲むように円環状に配列されている。また、外側テーブル164は、回転軸16aを中心に、時計回り方向(矢印A1方向)および反時計回り方向(矢印A2方向)に水平に回転可能に構成されている。具体的には、図9に示すように、外側テーブル164は、ドライバ基板2fを介して制御部2aにより制御される第2ステッピングモータ164a(図3参照)によって回転軸16aを中心に回転されるように構成されている。したがって、図8に示すように、外側テーブル164は、外側テーブル164に対する回転軸16aからの距離(R2試薬容器110に対する回転軸16aからの距離)L2が、内側テーブル163に対する回転軸16aからの距離よりも大きくなるような位置に、回転可能に設けられている。なお、本実施形態では、このR2試薬容器110に対する回転軸16aからの距離L2は、約175.5mmである。また、外側テーブル164は、内側テーブル163とは独立して回転可能であり、R1試薬容器100およびR3試薬容器120の回転(回動)の速さおよび方向に影響されることなくR2試薬容器110を任意の方向および速さで回転(回動)させることが可能である。
【0059】
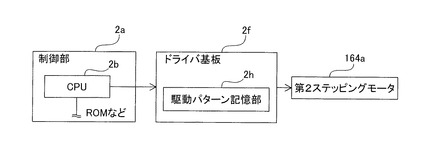
ここで、磁性粒子を含むR2試薬は、試薬内の磁性粒子を均一に分散させておくために攪拌する必要がある。このため、本実施形態では、外側テーブル164は、外側テーブル164が保持するR2試薬容器110に収容されたR2試薬を攪拌しながら回転(回動)する機能を有している。攪拌動作時(R2試薬の吸引動作を行わない時)には、外側テーブル164は、回転軸16aを中心として、R2試薬容器110に収容されたR2試薬を攪拌可能なように一方方向(矢印A1方向)に間欠回転移動するように構成されている。詳細には、図9に示すように、外側テーブル164は、CPU2bから出力される制御信号に基づき、ドライバ基板2fが所定のパルス電流(パルス信号)を第2ステッピングモータ164aに印加することにより、外側テーブル164の回転移動(第2ステッピングモータ164aの回転駆動)が制御されるように構成されている。ドライバ基板2fは、駆動方式(矩形駆動および台形駆動)や駆動パルス数などの設定値を格納する駆動パターン記憶部2hを含み、これらの設定値がCPU2bにより設定されるように構成されている。これにより、外側テーブル164は、外側テーブル164が保持するR2試薬容器110に収容されたR2試薬の攪拌を行うための攪拌動作と、R2試薬容器110に収容されたR2試薬をR2試薬分注アーム7によって吸引するための所定のR2試薬吸引位置P2への移動動作との、2通りの動作制御がCPU2bおよびドライバ基板2fによって行われるように構成されている。
【0060】
R2試薬の攪拌動作は、外側テーブル164が停止している状態と一方方向(矢印A1方向)に回転移動している状態とを周期的に切り替えながら、外側テーブル164を一方方向(矢印A1方向)に間欠的に回転移動させる動作である。より詳細には、R2試薬の撹拌動作は、外側テーブル164が停止している状態から外側テーブル164の回転移動を開始させる加速工程と、外側テーブル164を減速させて外側テーブル164を停止させる減速工程とを交互に繰り返しながら、外側テーブル164を一方方向に回転移動させる動作である。この際、CPU2b(ドライバ基板2f)は、R2試薬容器110内においてR2試薬を攪拌可能な慣性力をR2試薬に作用させることができるように、第2ステッピングモータ164aの駆動制御を行うように構成されている。本実施形態では、CPU2b(ドライバ基板2f)は、外側テーブル164が停止している状態と一方方向(矢印A1方向)に回転移動している状態との切り替えを行うように第2ステッピングモータ164aを駆動させるように構成されている。
【0061】
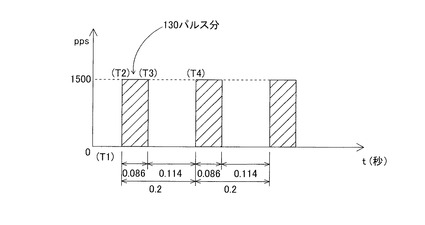
攪拌動作時において、CPU2b(ドライバ基板2f)は、試薬吸引時に外側テーブル164を回転移動させる際の第2ステッピングモータ164aの駆動方式である台形駆動方式よりも外側テーブル164の回転移動を急激に加速および減速させる矩形駆動方式により、第2ステッピングモータ164aを駆動させている。具体的には、図10に示すように、ドライバ基板2fは、1500pps(pulses per second:1秒あたりにステッピングモータに印加するパルス数)の速さ(以下、「パルス速度(pps)」という)で130パルス分(130/1500=約0.086秒間)のパルス電流を第2ステッピングモータ164aに印加(回転移動状態)した後、約0.114秒間パルス電流の印加を停止(停止状態)する動作を1単位の攪拌動作として、第2ステッピングモータ164aを駆動するように構成されている。この際、外側テーブル164が停止している状態から第2ステッピングモータ164aにパルス速度1500ppsのパルス電流を印加し、その印加状態を0.086秒間続けた後、第2ステッピングモータ164aへのパルス電流の印加を0.014秒間停止させるという1単位の攪拌動作制御における第2ステッピングモータ164aの駆動速度の変化が、略矩形状となる。そして、ドライバ基板2f(CPU2b)は、この1単位の攪拌動作を約0.2秒間(0.086秒+0.114秒)の周期で繰り返し行うように第2ステッピングモータ164aの駆動制御を行うように構成されている。
【0062】
また、外側テーブル164は、第2ステッピングモータ164aが130パルス分だけ駆動されることによって、1単位の攪拌動作により約3.25度だけ矢印A1方向に回転移動するように構成されている。このように、第2ステッピングモータ164aの駆動状態は、第2ステッピングモータ164aにパルス電流を印加していない状態からパルス速度1500ppsのパルス電流を第2ステッピングモータ164aに印加している状態(またはパルス速度1500ppsのパルス電流を第2ステッピングモータ164aに印加している状態から第2ステッピングモータ164aにパルス電流を印加していない状態)に瞬間的に切り替えられるため、外側テーブル164の動作は、急加速と急停止とを周期的に繰り返しながら約3.25度の角度ずつ矢印A1方向に回転するような回転移動動作となる。CPU2b(ドライバ基板2f)は、R2試薬の吸引のためのR2試薬吸引位置P2への移動動作などを除き、このR2試薬の攪拌動作制御を常時実施するように構成されている。したがって、分析装置1が分析動作を実行可能なスタンバイ状態にあれば、外側テーブル164は、R2試薬の攪拌動作を行うことによってR2試薬容器110内の磁性粒子を均一に分散させておくように構成されている。
【0063】
一方、R2試薬吸引位置P2への移動動作は、外側テーブル164を矢印A1方向に回転させて、吸引対象のR2試薬を収容したR2試薬容器110を所定位置まで移動させる動作である。この際、CPU2b(ドライバ基板2f)は、台形駆動により第2ステッピングモータ164aを駆動させる制御を行うように構成されている。すなわち、CPU2b(ドライバ基板2f)は、R2試薬撹拌時の外側テーブル164の加速度よりも小さい等加速度の加速期間(パルス速度(pps)を徐々に増加させる期間)と、等速回転期間(パルス速度(pps)一定の期間)と、R2試薬撹拌時の外側テーブル164の減速度よりも小さい等減速度の減速期間(パルス速度(pps)を徐々に減少させる期間)とを含むように第2ステッピングモータ164aを駆動させるように構成されている。なお、これらの加速期間、等速回転期間、および減速期間の長さは、吸引対象のR2試薬容器110の位置(R2試薬容器110からR2試薬吸引位置P2までの距離)により異なる。
【0064】
また、外側テーブル164の所定の位置には、試薬設置部16に取り付けられた磁石(図示せず)を検知する磁気センサからなる第2ホール素子164b(図3参照)が設けられている。また、第2ステッピングモータ164aの回転軸には、モータの回転角度を検知する光学センサからなる第2エンコーダ164cが設けられている。これらの第2ホール素子164bおよび第2エンコーダ164cを用いて、外側テーブル164の原点出し(原点の位置合わせ)が行われる。
【0065】
R1試薬開閉機構部17、R2試薬開閉機構部18およびR3試薬開閉機構部19は、それぞれ、同様の構成を有している。ここでは、R2試薬開閉機構部18の構成について説明する。
【0066】
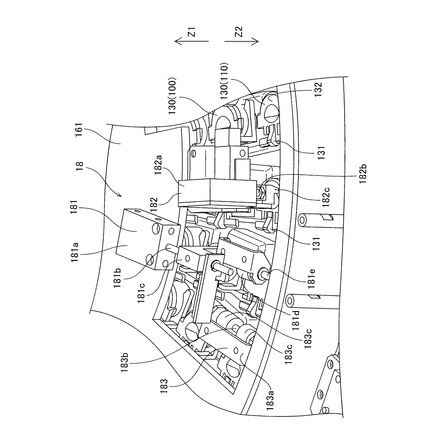
R2試薬開閉機構部18は、図11に示すように、密封解除部181と、蓋部材移動部182と、開口密封部183とを含んでいる。
【0067】
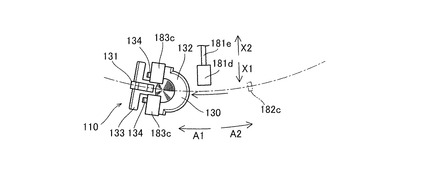
密封解除部181は、カバー部161上に設置された第3エアシリンダ181aと、軸部181bと、取付部181cと、解除ローラ181dと、ローラ軸181eとを有している。また、軸部181bは、第3エアシリンダ181aから円形状のカバー部161の半径方向に延びるように設けられており、ローラ軸181eは、軸部181bの下方側(矢印Z2方向側)で、軸部181bに平行(水平)にカバー部161の半径方向に延びるように配置されている。また、軸部181bとローラ軸181eとは、取付部181cにより連結されている。解除ローラ181dは、ローラ軸181eを回転中心として回転可能に構成されている。また、解除ローラ181dは、外側テーブル164に保持されたR2試薬容器110の後述する蓋部材130の凸部131(図18参照)に当接する高さに配置されている。また、密封解除部181は、第3エアシリンダ181aが駆動されることによって、軸部181b、取付部181cおよびローラ軸181eを介して、解除ローラ181dがカバー部161の半径方向(図15の矢印X1およびX2方向)に水平に直線移動されるように構成されている。これにより、解除ローラ181dを蓋部材130の凸部131に当接する位置と当接しない位置とに移動させることが可能となる。
【0068】
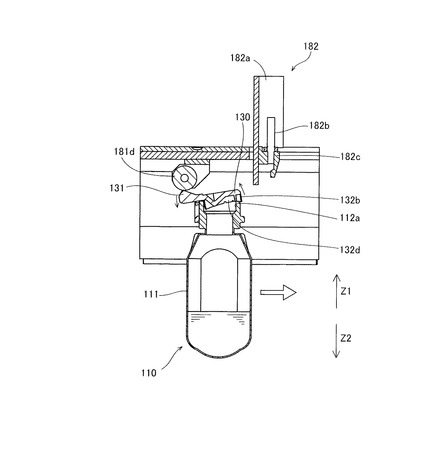
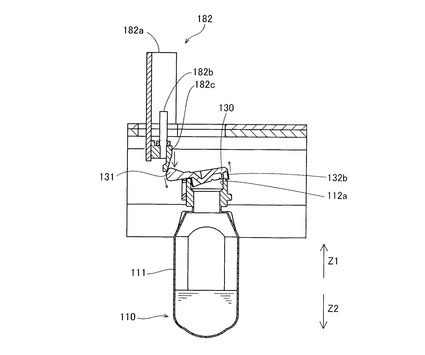
蓋部材移動部182は、図11に示すように、カバー部161上に配置された第4エアシリンダ182aと、軸部182bと、押圧部材182cとを含んでいる。また、図18に示すように、軸部182bは、第4エアシリンダ182aから鉛直下方向(矢印Z2方向)に延びるように設けられており、押圧部材182cは、軸部182bの下側端部に取り付けられている。また、押圧部材182cは、外側テーブル164に保持されたR2試薬容器110の蓋部材130の上方(矢印Z1方向側)で、平面的に見て、R2試薬容器110の凸部131の移動経路上に配置されている。また、蓋部材移動部182は、第4エアシリンダ182aが駆動されることによって、軸部182bを介して押圧部材182cが鉛直方向(矢印Z1およびZ2方向)に直線移動されるように構成されている。これにより、押圧部材182cによって、所定位置にある蓋部材130の凸部131を下方(矢印Z2方向)に押圧することが可能となる。
【0069】
図11に示すように、開口密封部183は、取付部183aと、ローラ軸183bと、2つのローラ183cとを含んでいる。取付部183aは、カバー部161(図6参照)の裏面に取り付けられており、ローラ軸183bは、取付部183aに支持されている。また、2つのローラ183cは、ローラ軸183bを回転中心として回転可能に構成されている。また、2つのローラ183cは、外側テーブル164に保持されたR2試薬容器110の後述する蓋部材130の上面132a(図12参照)に当接するように配置されている。また、2つのローラ183cは、外側テーブル164の回転(回動)移動に伴って移動されるR2試薬容器110の蓋部材130に当接することによって、R2試薬容器110を密封状態に戻す機能を有している。本実施形態では、開口密封部183は、外側テーブル164の回転軸16aを中心とした矢印A1方向の回転動作(攪拌動作およびR2試薬吸引位置P2への移動動作)を利用して、R2試薬容器110の蓋部材130の密封状態を常に確保するように構成されている。また、図15に示すように、2つのローラ183cは、R2試薬容器110の蓋部材130の凸部131に当接しないように所定の間隔を隔てて設けられており、R2試薬容器110の凸部131は、平面的に見て、外側テーブル164の回転(回動)移動に伴って2つのローラ183cの離間部を通過する。
【0070】
なお、図6に示すように、R1試薬開閉機構部17の密封解除部171およびR3試薬開閉機構部19の密封解除部191は、それぞれ、R2試薬開閉機構部18の密封解除部181に対応するとともに、R1試薬開閉機構部17の第1エアシリンダ171aおよびR3試薬開閉機構部19の第5エアシリンダ191aは、それぞれ、R2試薬開閉機構部18の第3エアシリンダ181aに対応している。また、R1試薬開閉機構部17の軸部171bおよびR3試薬開閉機構部19の軸部191bは、それぞれ、R2試薬開閉機構部18の軸部181bに対応している。また、R1試薬開閉機構部17の蓋部材移動部172およびR3試薬開閉機構部19の蓋部材移動部192は、それぞれ、R2試薬開閉機構部18の蓋部材移動部182に対応するとともに、R1試薬開閉機構部17の第2エアシリンダ172aおよびR3試薬開閉機構部19の第6エアシリンダ192aは、それぞれ、R2試薬開閉機構部18の第4エアシリンダ182aに対応している。また、R1試薬開閉機構部17およびR3試薬開閉機構部19は、それぞれ、図示しないが、R2試薬開閉機構部18の密封解除部181の取付部181c、解除ローラ181d、ローラ軸181e、蓋部材移動部182の軸部182b、押圧部材182c、および、開口密封部183の取付部183a、ローラ軸183b、2つのローラ183cに対応する構成を有している。
【0071】
図12および図15を参照して、本発明の一実施形態による分析装置1に用いられるR2試薬容器110の構成について説明する。
【0072】
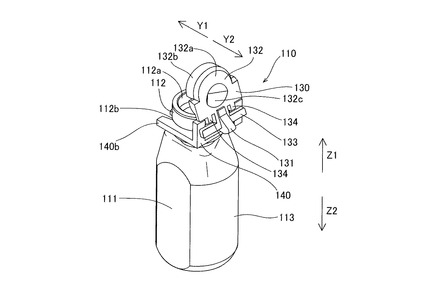
図12に示すように、R2試薬容器110は、容器本体111と、容器本体111を密閉する蓋部材130と、蓋部材130を回動可能に支持する支持部材140とを含んでいる。
【0073】
R2試薬容器110の容器本体111は、上側に略円筒形状に形成された円筒部112を有するとともに、下側に試薬を収容する収容部113を有している。円筒部112の上端部には、円形形状の開口部112aが設けられており、円筒部112の側面には、水平方向に延びる一対の切欠溝112bが左右対称に形成されている。この切欠溝112bに支持部材140の後述するアーム部140bが係合されることによって、支持部材140が容器本体111に取り付けられる。
【0074】
蓋部材130は、図12に示すように、凸部131と、本体部132と、凸部131を支持する基台部133と、一対の回動部134とを有している。凸部131は、平面的に見て略T字形状の基台部133上に形成されており、蓋部材130の後方側(矢印Y2方向側)に配置されている。また、凸部131は、本体部132の上面132aよりも上側に突出するように形成されている。また、凸部131は、平面的に見て、矢印Y1およびY2方向に延びる長方形状(図15参照)を有し、上述の開口密封部183の2つのローラ183cの離間距離よりも小さい矢印X1およびX2方向の幅に形成されている。
【0075】
本体部132は、図15に示すように、平面的に見て、前方側(図12の矢印Y1方向側)が半円形状に形成されるとともに、後方側が矩形形状に形成されている。また、図12に示すように、本体部132は、実質的に本体部132の外形に沿って下方に向かって延びる側壁部132bと、上面132aに形成された略円錐形状の凹部132cとを有している。
【0076】
基台部133は、図12に示すように、平面的に見て、略T字形状(図15参照)を有し、凸部131を支持する機能を有している。また、基台部133は、本体部132の後方側(矢印Y2方向側)に配置されている。
【0077】
一対の回動部134は、それぞれ、図12に示すように、本体部132の後方側で、本体部132と略T字形状の基台部133の左右に延びる部分との間に配置されている。また、回動部134には図示しない軸受部が形成されている。回動部134の軸受部に支持部材140の図示しない軸部を嵌め込むことによって、蓋部材130は、軸部(回動部134)を回動中心として回動可能となる。これにより、凸部131と本体部132とは、回動中心(回動部134)に対して互いに反対側に位置するので、凸部131を下方に移動させることによって、本体部132側を上方に移動させることが可能となる。
【0078】
支持部材140は、一対のアーム部140bを有している。また、支持部材140は、図示しない一対の軸部によって、蓋部材130が回動部134を中心に回動可能な状態で蓋部材130と係合するように構成されている。一対のアーム部140bは、それぞれ、容器本体111の円筒部112の切欠溝112bに係合するように構成されている。これにより、図12に示すように、蓋部材130は、支持部材140を介して容器本体111の円筒部112に取り付けられる。
【0079】
なお、R1試薬容器100およびR3試薬容器120も、上述のR2試薬容器110と同様の蓋部材130および支持部材140とを含んでいる。したがって、R1試薬容器100およびR3試薬容器120は、R2試薬容器110の蓋部材130の開閉を行うR2試薬開閉機構部18と同様に構成されたR1試薬開閉機構部17およびR3試薬開閉機構部19によって、それぞれ蓋部材130の開閉を行うことが可能なように構成されている。
【0080】
次に、図8〜図10および図13を参照して、本実施形態による分析装置1の外側テーブル164によるR2試薬の攪拌動作について説明する。
【0081】
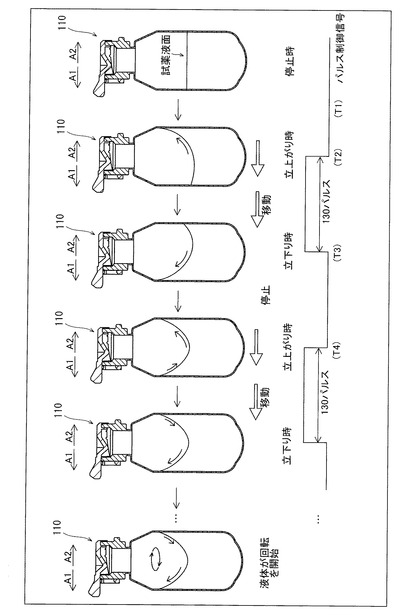
図13に示すように、まず、タイミングT1において、初期状態として外側テーブル164が停止状態にあり、R2試薬容器110内の試薬液面も略水平の状態にあるとする。この状態から、図9に示すように、CPU2bから出力される制御信号に基づき、ドライバ基板2fからパルス速度1500ppsのパルス電流が第2ステッピングモータ164aに印加されることにより、攪拌動作が開始される。
【0082】
タイミングT2では、ドライバ基板2fから第2ステッピングモータ164aに1500ppsでパルス電流が印加されることにより、第2ステッピングモータ164aの回転速度が1500ppsに立ち上がる。この際、図10に示したように、第2ステッピングモータ164aは、パルス電流が印加されていない状態から瞬間的にパルス速度1500ppsのパルス電流が印加されている状態に切り替わるため、外側テーブル164は矢印A1方向に急加速して回転軸16a(図8参照)を中心に回転移動を開始する。なお、1500ppsのパルス電流の印加状態は0.086秒間継続し、この間に外側テーブル164は等速回転状態となる。図13に示すように、外側テーブル164の回転移動に伴って、R2試薬容器110も矢印A1方向に移動する一方、R2試薬容器110内のR2試薬は、慣性によりその場に留まろうとする。この結果、R2試薬容器110内のR2試薬は、進行方向(矢印A1方向)とは逆方向(矢印A2方向)の内壁面によって押し出されるようにして移動(流動)する。矢印A1方向への移動のためのパルス電流の印加が約0.086秒間(1500ppsで130パルス分)継続されると、タイミングT3において、第2ステッピングモータ164aへのパルス電流の印加が停止され、外側テーブル164は急減速して停止する。なお、タイミングT2からタイミングT3までの矢印A1方向へ約0.086秒間(1500ppsで130パルス分)のパルス電流の印加によって、外側テーブル164は回転軸16aを中心に矢印A1方向に約3.25度回転移動する。
【0083】
このタイミングT3では、第2ステッピングモータ164aへのパルス電流の停止に伴い、外側テーブル164の矢印A1方向の回転移動は急停止する。外側テーブル164の停止に伴って、R2試薬容器110も停止する一方、R2試薬容器110内のR2試薬は、慣性により矢印A1方向に移動し続けようとする。この結果、進行方向とは逆方向(矢印A2方向)の内壁面側に押し付けられていたR2試薬は、逆にR2試薬容器110に対して相対的に矢印A1方向側に向かって移動(流動)し、R2試薬容器110の矢印A1方向側の内壁面に押し付けられるように移動(流動)する。ただし、タイミングT2でR2試薬が矢印A2方向に移動していたため、R2試薬容器110内のR2試薬は、粘性などによって一部を容器の矢印A2方向側の内壁面に残したまま、引きずるようにして矢印A1方向側へ移動する。第2ステッピングモータ164aへのパルス電流の停止状態は約0.114秒間継続して、1単位の攪拌動作制御が完了する。そして、約0.114秒間の停止状態の後、タイミングT4において、ドライバ基板2f(CPU2b)により、再び第2ステッピングモータ164aにパルス速度1500ppsのパルス電流の印加が開始される。
【0084】
タイミングT4では、タイミングT2と同様に、外側テーブル164が急加速して、回転軸16a(図8参照)を中心に矢印A1方向に回転移動を開始する。この結果、R2試薬容器110内の試薬液面は、慣性によって進行方向(矢印A1方向)とは逆方向(矢印A2方向)の内壁面に押し付けられるように移動(流動)する。この際にも、タイミングT3でR2試薬が矢印A1方向に移動していたため、R2試薬容器110内のR2試薬は、粘性などによって一部を容器の矢印A1方向側の内壁面に残したまま、引きずるようにして矢印A2方向側へ移動する。このようにして、R2試薬容器110内のR2試薬は、外側テーブル164の急加速と急停止とによってR2試薬容器110内を矢印A1方向側と矢印A2方向側とに揺動されることにより、試薬内の磁性粒子が攪拌され始める。
【0085】
その後、タイミングT2(T4)における約0.086秒間のパルス電流印加状態と、タイミングT3における約0.114秒間のパルス電流停止状態とからなる攪拌動作制御が約0.2秒周期で繰り返されると、揺動されたR2試薬が容器の内壁面に押し付けられることによって、R2試薬容器110内の試薬液面は中央部が凹んだすり鉢状形状になる。さらに、外側テーブル164による半径L2、角度約3.25度の間欠的な回転移動が繰り返されることによって、R2試薬容器110内のR2試薬は、R2試薬容器110の内壁面に沿って試薬液面が周方向に回転しながら流動する。このようにして、R2試薬容器110内の試薬に含まれる磁性粒子が攪拌され、試薬内で均一に分散される。また、このような方法で攪拌動作を行うことにより試薬容器内の試薬の液跳ねを抑制することも可能である。なお、上述のように、130パルス分の回転移動によって外側テーブル164は約3.25度回転するとともに、1単位(パルス電流印加状態およびパルス電流停止状態を各1回)の攪拌動作制御に要する時間は、約0.2秒間である。このため、攪拌動作中には、外側テーブル164が1周回転するまでに約111回(360/3.25)の攪拌動作制御が実施され、この1周分の攪拌動作に要する時間は、約0.2×111=約22.2秒となる。
【0086】
次に、図4および図15〜図21を参照して、本実施形態による分析装置1のR2試薬吸引処理動作について説明する。
【0087】
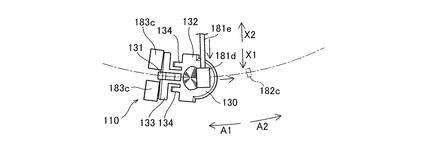
本実施形態では、外側テーブル164はR2試薬の攪拌動作を継続的に実施しているとともに、測定機構部2の各部において各種の処理を行っている。すなわち、本実施形態では、R2試薬吸引位置への移動動作中およびR2試薬分注アーム7によるR2試薬の吸引動作中を除いて、常時R2試薬の攪拌動作が実施されている。この際、図15に示すように、R2試薬容器110は時計回り方向(矢印A1方向)に間欠的に回転(回動)されており、蓋部材130は開口密封部183の2つのローラ183cに当接される。これにより、R2試薬容器110は、蓋部材130が上方から押圧されるので、開口部112aの密封状態が緩むのを抑制される。この際、解除ローラ181dは、凸部131に当接しない位置に配置されている。
【0088】
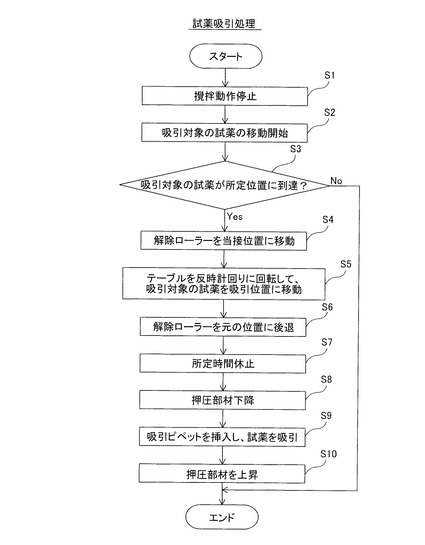
そして、R2試薬の吸引処理を行う際には、ステップS1において、外側テーブル164によるR2試薬の攪拌動作が停止される。次に、ステップS2において、制御部2aのCPU2b(図4参照)により外側テーブル164が回転軸16aを中心に矢印A1方向に回転移動されることによって、吸引対象のR2試薬容器110の移動が開始される。この際、外側テーブル164の第2ステッピングモータ164aは、CPU2b(ドライバ基板2f)により、R2試薬の攪拌時よりも外側テーブル164の回転移動の加速度および減速度が小さくなる台形駆動方式で駆動される。
【0089】
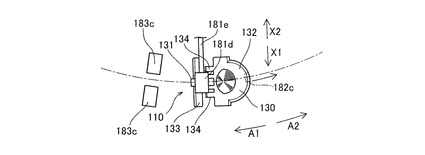
ステップS3では、制御部2aのCPU2b(図4参照)により、吸引対象のR2試薬容器110が所定位置に到着したか否かが判断される。具体的には、図16に示すように、R2試薬容器110の凸部131が解除ローラ181dを通過した後、2つのローラ183cの近傍に到着したときに、R2試薬容器110が所定位置に到着したと判断される。次に、ステップS4において、CPU2bにより第3エアシリンダ181aが駆動されることによって、解除ローラ181dが凸部131に当接する位置(図16参照)まで水平移動される。
【0090】
そして、ステップS5において、外側テーブル164が反時計回り方向(矢印A2方向)に回動されて、R2試薬吸引位置P2まで移動される。この際、図17に示すように、解除ローラ181dが蓋部材130の本体部132側から凸部131に当接される。そして、R2試薬容器110の移動が、さらに反時計回り方向(矢印A2方向)に継続されることによって、図18に示すように、蓋部材130は、解除ローラ181dにより凸部131側が徐々に下方に押し下げられ、それに伴って蓋部材130の本体部132側が徐々に上方に移動される。そして、解除ローラ181dが凸部131の頂部に到達することにより、R2試薬容器110内に外気が流入してR2試薬容器110の外部と内部との気圧差がなくなり、蓋部材130が開口部112aを覆った状態でR2試薬容器110の密封状態が解除される。
【0091】
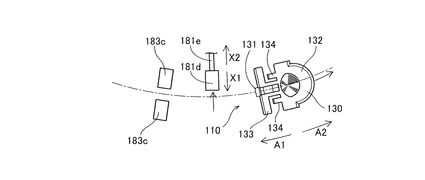
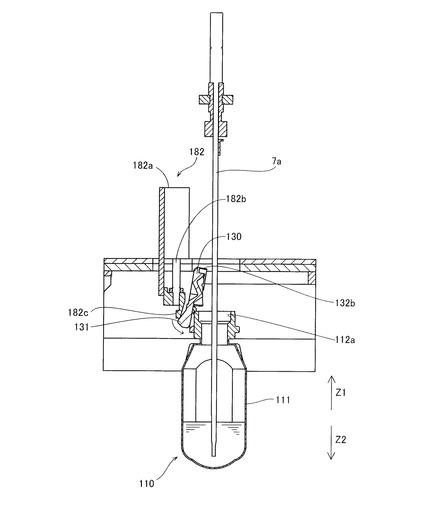
そして、R2試薬容器110の凸部131が押圧部材182cの下方に到着(R2試薬吸引位置P2に到着)すると、ステップS6において、解除ローラ181dは、図19に示すように、凸部131に当接しない元の位置まで戻される。その後、ステップS7において動作を所定時間休止した後、ステップS8において、図20に示すように、CPU2bにより第4エアシリンダ182aが駆動されることによって、蓋部材移動部182の押圧部材182cが下降される。これにより、押圧部材182cによって、凸部131が下方に押圧される。凸部131が下方に押圧されると、蓋部材130の回動中心に対して凸部131とは反対側に位置する本体部132側(開口部112a側)が上方に移動される。このようにして蓋部材130が開口部112aを覆わない位置まで移動されることによって、図21に示すように、R2試薬容器110の開口部112aが開放される。
【0092】
その後、ステップS9において、R2試薬分注アーム7のピペット7aがR2試薬容器110の開口部112aを介して容器本体111に挿入されるとともに、ピペット7aにより所定量のR2試薬が吸引される。そして、R2試薬の吸引終了後、ステップS10において、押圧部材182cが上方に向かって移動される。これにより、開放状態が解除されて、蓋部材130が開口部112aを覆う位置まで戻される。以上により、試薬吸引処理動作が完了する。
【0093】
その後、CPU2b(ドライバ基板2f)により外側テーブル164が再び矢印A1方向に回転(回動)され、R2試薬の攪拌動作が開始される。これにより、密封解除状態にある蓋部材130は、進行方向側に位置する2つのローラ183cに当接する(図15参照)ことによって、下方への押圧力を受けて、R2試薬容器110は密封状態に戻される。なお、上記ステップS4〜ステップS10までの一連の動作は、約2秒以内に行われる。
【0094】
なお、R2試薬以外のR1試薬、R3試薬の吸引処理動作は、攪拌動作を除いてそれぞれ同様である。したがって、磁性粒子を含まないR1試薬およびR3試薬の吸引処理動作では、ステップS1の処理(攪拌動作停止)が行われることなく、ステップS2以降の処理が行われる。また、R1試薬およびR3試薬の吸引処理動作では、内側テーブル163が外側テーブル164とは独立して回転してR1試薬吸引位置P1およびR3試薬吸引位置P3のそれぞれへの移動が行われる。
【0095】
本実施形態では、上記のように、試薬の吸引を行わないときには、加速(パルス電流停止状態から1500ppsのパルス電流印加状態への切り替え)と減速(パルス電流印加状態からパルス電流停止状態への切り替え)とを交互に繰り返しながら外側テーブル164を矢印A1方向に回転移動させるよう、CPU2b(ドライバ基板2f)が第2ステッピングモータ164aを制御することによって、加速と減速とを交互に繰り返しながら外側テーブル164を矢印A1方向に間欠的に回転移動させるだけで、R2試薬容器110内の試薬の攪拌を行うことができる。すなわち、加速と減速とを交互に繰り返しながら外側テーブル164aを回転移動させた場合には、R2試薬容器110内のR2試薬は慣性によって回転移動の加速前および減速前の速さを維持しようとするため、R2試薬容器110の速さの変化によってR2試薬容器110内のR2試薬をR2試薬容器110に対して相対的に流動させることができる。このR2試薬の流動に伴い、R2試薬の攪拌が効果的に行われる。これにより、外側テーブルに試薬容器を自転させる構造を設ける場合と比較して、分析装置1の構造を簡略化することができる。このように本発明の一実施形態による分析装置1では、装置の構造を簡略化するとともに、R2試薬容器110に収容されたR2試薬の攪拌を効果的に行うことができる。
【0096】
また、本実施形態では、上記のように、回転停止状態とパルス速度1500ppsでの回転移動状態とを切り替えながら、外側テーブル164が矢印A1方向に間欠回転移動するように、CPU2b(ドライバ基板2f)が第2ステッピングモータ164aを制御することによって、容易に、回転停止状態と回転移動状態との速さの差を大きくすることができる。つまり、回転停止状態から1500ppsでの回転移動状態への加速および1500ppsでの回転移動状態から回転停止状態への減速によって、回転移動状態における回転移動の速さを大きくしなくても、容易に加速度および減速度を大きくすることができる。これにより、より容易に、R2試薬容器110内のR2試薬により大きな慣性力を作用させることができる。
【0097】
また、本実施形態では、上記のように、CPU2b(ドライバ基板2f)が、第2ステッピングモータ164aへのパルス電流の印加停止状態を約0.114秒間継続させるとともに、第2ステッピングモータ164aへのパルス速度1500ppsのパルス電流の印加状態を約0.086秒間継続させるように、第2ステッピングモータ164aを制御することによって、外側テーブル164の回転停止状態および回転移動状態が短い期間で切り替わるので、図13に示したようにR2試薬容器110内において移動(流動)した状態にあるR2試薬を落ち着かせることなく攪拌することができる。このため、たとえばステッピングモータへのパルス電流の印加状態に切り替えて試薬容器内の試薬を流動させた後、試薬の流動が落ち着いてからステッピングモータへのパルス電流の印加停止状態に切り替える場合と比較して、より効果的にR2試薬容器110内のR2試薬を攪拌することができる。
【0098】
また、本実施形態では、上記のように、R2試薬を吸引しないときには、CPU2b(ドライバ基板2f)が、第2ステッピングモータ164aにパルス電流を印加していない状態から、第2ステッピングモータ164aにパルス速度1500ppsのパルス電流を印加している状態に切り替えて外側テーブル164を回転移動させた後、第2ステッピングモータ164aへのパルス電流の印加停止状態に切り替えるまでの駆動を、上述した矩形駆動方式により行うことによって、外側テーブル164の回転移動の速さを急激に変化させることができる。これにより、R2試薬容器110内のR2試薬に大きな慣性力を作用させることができ、その結果、R2試薬容器110内のR2試薬を効果的に移動(流動)させることができるので、R2試薬の攪拌をさらに効果的に行うことができる。
【0099】
また、本実施形態では、上記のように、R2試薬を吸引するときには、CPU2b(ドライバ基板2f)が、R2試薬撹拌時の外側テーブル164の加速度よりも小さい等加速度の加速期間(パルス速度を徐々に増加させる期間)と、R2試薬撹拌時の外側テーブル164の減速度よりも小さい等減速度の減速期間(パルス速度を徐々に減少させる期間)とを含む台形駆動方式により、第2ステッピングモータ164aを制御することによって、R2試薬撹拌時の加速度および減速度よりも速さの変化が緩やかになるように、外側テーブル164を移動させることができるので、R2試薬吸引位置P2へ移動する際の外側テーブル164の停止位置を正確に制御することができる。これにより、試薬吸引位置へ試薬容器を精度良く位置づけることができる。
【0100】
また、本実施形態では、上記のように、CPU2b(ドライバ基板2f)が、第2ステッピングモータ164aへのパルス電流の印加を停止している状態と、第2ステッピングモータ164aにパルス速度1500ppsのパルス電流を印加している状態との切り替えを周期的に繰り返すことによって、R2試薬容器110内のR2試薬を効果的に移動(流動)させるとともに、この切り替えを周期的に行うことによってR2試薬容器110内のR2試薬の流動状態を継続させることができるので、R2試薬が攪拌された状態を保つことができる。
【0101】
また、本実施形態では、上記のように、回転軸16aを中心とした外側テーブル164の矢印A1方向への水平回転移動を利用してR2試薬容器110の蓋部材130を移動させることにより、R2試薬容器110の開口部112aの閉塞動作を行う開口密封部183(ローラ183c)を設けることによって、外側テーブル164を矢印A1方向へ回転移動させるだけで、R2試薬容器110の開口部112aの閉塞を行うことができる。
【0102】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0103】
たとえば、上記実施形態では、回転軸16aを中心として、外側テーブル164を、内側テーブル163の外側に配置した例を示したが、本発明はこれに限られない。たとえば、外側テーブルと内側テーブルとを、それぞれ別個の回転軸を中心に回転する独立した試薬容器保持部として構成してもよい。
【0104】
また、上記実施形態では、検体分析装置の一例として、R1試薬容器、R2試薬容器およびR3試薬容器の3種類の試薬容器を保持可能な試薬設置部を備えた分析装置を示したが、本発明はこれに限らず、1種類または2種類の試薬容器を保持する試薬設置部を備えた分析装置であってもよいし、4種類以上の試薬容器を保持する試薬設置部を備えた分析装置であってもよい。
【0105】
また、上記実施形態では、ステッピングモータにより外側テーブルを回転軸を中心として回転移動させるように構成した例を示したが、本発明はこれに限られない。たとえば、ステッピングモータ以外のサーボモータなどを用いて外側テーブルを回転移動させるように構成してもよい。
【0106】
また、上記実施形態では、R2試薬容器の撹拌動作時には、第2ステッピングモータ164aにパルス速度1500ppsのパルス電流を印加しているが、本発明はこれに限られない。たとえば、ステッピングモータに2000ppsや1000ppsなど、1500pps以外のパルス電流を印加してもよい。
【0107】
また、上記実施形態では、第2ステッピングモータ164aにパルス電流を印加していない状態と、1500ppsのパルス電流を印加している状態とを切り替えるように構成した例を示したが、本発明はこれに限られない。たとえば、第2ステッピングモータに150ppsのパルス電流を印加している状態と、1500ppsのパルス電流を印加している状態とを切り替えることによって、R2試薬の攪拌動作を行うように構成してもよい。このように構成すれば、外側テーブル164が停止することなく常に回転移動しながら、R2試薬容器110内の試薬に大きな慣性力を作用させることができる。これにより、外側テーブル164の回転移動を停止させることなく、R2試薬の攪拌を効果的に行うことができる。
【0108】
また、上記実施形態では、R2試薬の攪拌動作時に、第2ステッピングモータ164aを上述した矩形駆動方式で駆動することによって、外側テーブル164を急加速および急停止させる構成を示したが、本発明はこれに限られない。本発明では、外側テーブルの加速度および減速度が所定の大きさ以上であればよい。また、本発明では、攪拌動作時において、第2ステッピングモータの駆動を矩形駆動方式により行わなくてもよい。外側テーブルの加速度および減速度が所定の大きさ以上であれば、台形駆動方式により攪拌動作を行っても攪拌効果を得ることができる。
【0109】
また、上記実施形態では、攪拌動作時において、第2ステッピングモータ164aへのパルス電流の印加状態を約0.086秒継続するとともに、第2ステッピングモータ164aへのパルス電流の印加停止状態を約0.114秒継続することによって、約0.2秒を1単位の攪拌動作とするように構成した例を示したが、本発明はこれに限られない。本発明では、第2ステッピングモータ164aへのパルス電流の印加状態を約0.086秒間とは異なる期間継続してもよい。第2ステッピングモータ164aへのパルス電流の印加停止状態も、約0.114秒間とは異なる期間継続してもよい。また、1単位の攪拌動作を約0.2秒以外の時間間隔を単位として実施するように構成してもよい。これらの値は、試薬の粘性、量、試薬容器の大きさ、形状などの条件に応じて、適宜変更すればよい。ただし、第2ステッピングモータ164aへのパルス電流の印加状態および印加停止状態は、それぞれ、0.08秒以上0.15秒以下の期間で継続されるのが好ましい。
【0110】
また、上記実施形態では、外側テーブル164の回転移動状態と停止状態とからなる1単位の攪拌動作を、周期的に行うように構成した例を示したが、本発明はこれに限られない。本発明は、外側テーブルの攪拌動作を周期的に行わなくてもよい。外側テーブルの回転移動にR2試薬の攪拌が可能な速さの変化(加速および減速)があれば、その変化が変則的であってもよい。
【0111】
また、上記実施形態では、1単位の攪拌動作において、第2ステッピングモータ164aの130パルス分の回転移動によって外側テーブル164が約3.25度回転するように構成した例を示したが、本発明はこれに限られない。本発明では、1単位の攪拌動作において、外側テーブルが3.25度以外の約5度以下、または約10度以下の角度範囲で回転移動するように構成してもよい。この場合、第2ステッピングモータを130パルス分回転駆動させる必要はなく、130パルス以外のパルス数だけ駆動させてもよいし、第2ステッピングモータの1パルス分の回転駆動に対する外側テーブルの回転角度の比率を変更してもよい。
【0112】
また、上記実施形態では、R2試薬の吸引処理を行うときには、所定位置以外の場所で外側テーブルの回転移動を減速させることなく、所定位置までR2試薬容器を位置づけているが、本発明はこれに限られない。例えば、R2試薬の吸引処理を行うときにも、R2試薬の撹拌動作時と同じように、間欠的に外側テーブルを回転させてR2試薬容器を所定位置に位置づけてもよい。
【0113】
また、上記実施形態では、R2試薬の吸引動作などを除いて、外側テーブル164が常時攪拌動作を行うように構成した例を示したが、本発明はこれに限られない。たとえば、外側テーブルの攪拌動作は、一定時間毎に定期的に行うように構成してもよい。また、たとえばR2試薬の吸引を行う際に、試薬吸引処理を行う前の時点で攪拌動作を行うようにしてもよい。
【0114】
また、上記実施形態では、外側テーブル164の回転移動を利用して、開口密封部183の2つのローラ183cによってR2試薬容器110の蓋部材130の密閉を行うように構成した例を示したが、本発明はこれに限られない。本発明では、外側テーブルの回転移動を利用して試薬容器の蓋部材を開放するように構成してもよい。たとえば、外側テーブルの矢印A1方向の回転移動を利用して試薬容器の蓋部材を密閉するとともに、矢印A2方向の移動を利用して試薬容器の蓋部材を開放するように構成してもよい。
【0115】
また、上記実施形態では、密封解除部181により開口部112aの密封状態を解除し、蓋部材移動部182により開口部112aを全開しているが、本発明はこれに限られない。たとえば、1つの機構により開口部112aの密封解除動作と全開動作とを実行してもよい。
【0116】
また、上記実施形態では、外側テーブルを回転移動させる駆動部を制御する駆動制御部の一例として、測定機構部のCPUおよびドライバ基板を示したが、本発明はこれに限らず、外側テーブルを回転移動させる駆動部を制御装置のCPUとドライバ基板とにより制御するようにしてもよい。また、この際、測定機構部の各部および検体搬送部の制御を制御装置のCPUで行ってもよい。
【符号の説明】
【0117】
1 分析装置
2a 制御部
2b CPU
2f ドライバ基板
7 R2試薬分注アーム
7a ピペット
14 検出部
16 試薬設置部
16a 回転軸
18 R2試薬開閉機構部
100 R1試薬容器
110 R2試薬容器
120 R3試薬容器
112a 開口部
130 蓋部材
163 内側テーブル
163a 第1ステッピングモータ
164 外側テーブル
164a 第2ステッピングモータ
183 開口密封部
183c ローラ
【技術分野】
【0001】
本発明は、検体分析装置および検体分析方法に関し、特に、試薬を攪拌するための機構を備えた検体分析装置および検体分析方法に関する。
【背景技術】
【0002】
従来、試薬を攪拌するための機構を備えた検体分析装置が知られている(例えば、特許文献1参照)。
【0003】
上記特許文献1に記載の検体分析装置は、試薬容器を円環状に載置したターンテーブルを回転させることによって、試薬容器をターンテーブルの回転中心の周りに公転させるとともに、試薬容器そのものをターンテーブルの上で自転させることによって試薬に含まれる微小粒子を均一に分散させる攪拌機構を備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−196006号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の検体分析装置の攪拌機構では、試薬容器の自転を行うための構造が必要となるため、装置の構造が複雑化するという問題点がある。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、装置の構造を簡略化するとともに、試薬容器に収容された試薬の攪拌を効果的に行うことが可能な検体分析装置および検体分析方法を提供することである。
【課題を解決するための手段および発明の効果】
【0007】
上記目的を達成するために、この発明の第1の局面における検体分析装置は、回転軸を中心に水平回転可能に構成され、試薬を収容した試薬容器を保持するための試薬容器保持部と、試薬容器保持部に保持された試薬容器から試薬を吸引する試薬吸引部と、試薬吸引部に吸引された試薬と検体とから調製された測定試料を分析する分析部と、試薬容器保持部を回転軸を中心として回転移動させる駆動部と、試薬容器から試薬を吸引するときには、試薬容器を試薬吸引部による試薬吸引位置に位置づけるために試薬容器保持部を一方方向に回転移動させ、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させるように、駆動部を制御する駆動制御部とを備える。
【0008】
この発明の第1の局面による検体分析装置では、上記のように、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させるように、駆動制御部が駆動部を制御することによって、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させるだけで、試薬容器内の試薬の攪拌を行うことができる。すなわち、加速と減速とを交互に繰り返しながら試薬容器保持部を回転移動させた場合には、試薬容器内の試薬は慣性によって回転移動の加速前および減速前の速さを維持しようとするため、試薬容器の速さの変化によって試薬容器内の試薬を試薬容器に対して相対的に流動させることができる。この試薬の流動に伴い、試薬の攪拌が効果的に行われる。これにより、試薬容器保持部に試薬容器を自転させる構造を設ける場合と比較して、装置の構造を簡略化することができる。このように本発明の検体分析装置では、装置の構造を簡略化するとともに、試薬容器に収容された試薬の攪拌を効果的に行うことができる。
【0009】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬を吸引しないときには、試薬容器保持部を一方方向に間欠回転移動させるよう、駆動部を制御するように構成されている。このように構成すれば、試薬容器保持部が回転移動と停止とを交互に繰り返す間欠回転移動を行うことによって、比較的低速の回転移動と比較的高速の回転移動との間で加速および減速を行う場合と比べて、容易に、停止時と回転移動時との速さの差を大きくすることができる。つまり、停止状態から回転移動状態への加速および回転移動状態から停止状態への減速とによって、回転移動時の速さを大きくしなくても、容易に加速度および減速度を大きくすることができる。これにより、より容易に、試薬容器内の試薬により大きな慣性力を作用させることができる。
【0010】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬容器から試薬を吸引するときには、第1加速度での加速により試薬容器保持部が一方方向への回転移動を開始し、第1減速度での減速により試薬容器保持部が一方方向への回転移動を停止するよう、駆動部を制御し、試薬を吸引しないときには、第1加速度よりも大きい第2加速度での加速と、第1減速度よりも大きい第2減速度での減速とを交互に繰り返しながら試薬容器保持部が一方方向に回転移動するよう、駆動部を制御する。このように構成すれば、試薬を吸引するときには、第2加速度および第2減速度よりもそれぞれ速さの変化が緩やかな第1加速度および第1減速度により試薬容器保持部を移動させることにより、試薬吸引位置へ移動する際の試薬容器保持部の停止位置を正確に制御することができる。これにより、試薬吸引位置へ試薬容器を精度良く位置づけることができる。また、試薬を吸引しないときには、第1加速度よりも大きい第2加速度での加速と、第1減速度よりも大きい第2減速度での減速とを交互に繰り返しながら試薬容器保持部を回転移動させることによって、試薬容器内の試薬に大きな慣性力を作用させることができ、その結果、試薬容器内の試薬を効果的に移動(流動)させることができるので、試薬の攪拌をさらに効果的に行うことができる。
【0011】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬を吸引しないときには、加速と減速との切り替えを周期的に繰り返すように、駆動部を制御するように構成されている。このように構成すれば、試薬容器保持部の加速と減速との切り替えによって試薬容器内の試薬を効果的に移動(流動)させるとともに、この切り替えを周期的に行うことによって試薬容器内の試薬の流動状態を継続させることができるので、試薬が攪拌された状態を保つことができる。
【0012】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬を吸引しないときには、減速により試薬容器保持部の回転移動が停止するように、駆動部を制御するように構成されている。このように構成すれば、減速により試薬容器保持部の回転移動を停止させる場合には、試薬容器保持部を減速させた結果、駆動部による試薬容器保持部の駆動を停止するように制御すればよいので、駆動部の駆動制御を容易に行うことができる。
【0013】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬を吸引しないときには、駆動部に駆動パルスを印加していない状態から駆動部に所定パルス数の駆動パルスを印加することにより、試薬容器保持部を加速させ、駆動部に所定パルス数の駆動パルスを印加している状態から駆動部への駆動パルスの印加を停止することにより、試薬容器保持部を減速させる。このように構成すれば、駆動パルスを駆動部に印加しない状態と、所定パルス数の駆動パルスを駆動部に印加する状態とを切り替える駆動制御を行うだけで、容易に、試薬容器保持部を加速または減速させることができる。
【0014】
上記第1の局面による検体分析装置において、好ましくは、駆動制御部は、試薬容器から試薬を吸引するときには、駆動部に印加する駆動パルス数を徐々に増加させることにより、試薬容器保持部の回転移動を加速させ、駆動部に印加する駆動パルス数を徐々に減少させることにより、試薬容器保持部の回転移動を減速させる。このように構成すれば、試薬を吸引するときには、試薬容器保持部の加速時および減速時の速さの変化が緩やかになるように駆動部の駆動制御を行うことができるので、試薬吸引位置へ移動する際の試薬容器保持部の停止位置を正確に制御することができる。これにより、試薬吸引位置へ試薬容器を精度良く位置づけることができる。
【0015】
上記第1の局面による検体分析装置において、好ましくは、試薬容器は、試薬を吸引するための上端開口と上端開口を閉塞するための蓋とを含み、回転軸を中心とした試薬容器保持部の一方方向への水平回転移動を利用して試薬容器の蓋を移動させることにより、試薬容器の上端開口の閉塞動作および開放動作の少なくとも一方を行う蓋移動部をさらに備える。このように構成すれば、試薬容器保持部を一方方向へ回転移動させるだけで、試薬容器の上端開口の閉塞および開放の少なくとも一方を行うことができる。
【0016】
上記第1の局面による検体分析装置において、好ましくは、試薬容器は、磁性粒子を含む試薬を収容する。このように構成すれば、磁性粒子を含む試薬は、磁性粒子を試薬内で均一に拡散させるために攪拌を行う必要があるので、本発明の検体分析装置により試薬容器に収容された試薬の攪拌を行なうことによって、容易に、磁性粒子を試薬内で均一に拡散させることができる。
【0017】
上記第1の局面による検体分析装置において、好ましくは、試薬容器保持部は、回転軸を中心に回転可能に構成され、磁性粒子を含む第1試薬を収容した第1試薬容器を保持するための第1容器保持領域と、回転軸を中心に回転可能に構成され、磁性粒子を含まない第2試薬を収容した第2試薬容器を保持するための第2容器保持領域とを含み、第1容器保持領域は、第1容器保持領域に対する回転軸からの距離が第2容器保持領域に対する回転軸からの距離よりも大きい位置に設けられている。このように構成すれば、攪拌が必要な磁性粒子を含む第1試薬を収容した第1試薬容器を保持するための第1容器保持領域に対する回転軸からの距離(回転半径)を、第2容器保持領域に対する回転軸からの距離(回転半径)よりも大きくすることによって、試薬容器保持部が回転する際の単位回転角度当りの第1容器保持領域(第1試薬容器)の移動距離を大きくすることができる。これにより、第1試薬容器の回転移動の速さをより大きくすることができるので、加速と減速とを繰り返しながら試薬容器保持部を回転移動させる際に、第1容器保持領域(第1試薬容器)の加速度および減速度をより大きくすることができる。その結果、第1試薬容器内の磁性粒子を含む試薬をより効果的に流動させることができるので、試薬の攪拌をより効果的に行うことができる。
【0018】
この場合において、好ましくは、駆動部は、第1容器保持領域を回転させるための第1駆動部と、第2容器保持領域を回転させるための第2駆動部とを含み、駆動制御部は、試薬を吸引しないときには、第1容器保持領域および第2容器保持領域のうち、第1容器保持領域のみが加速と減速とを交互に繰り返しながら一方方向へ回転移動するように、第1駆動部および第2駆動部を制御するように構成されている。このように構成すれば、第1容器保持領域が加速と減速とを交互に繰り返しながら一方方向へ回転移動することによって、攪拌が必要な第1試薬の攪拌を行うことができるとともに、第2容器保持領域では回転移動をさせないでおくことによって、攪拌が不要な第2試薬はそのまま攪拌を行うことなく第2容器保持領域に保持しておくことができる。これにより、攪拌が必要な第1試薬のみを攪拌することができるので、第2試薬に不必要に攪拌を行うことによる試薬品質の低下を防止することができる。
【0019】
上記第1の局面による検体分析装置において、好ましくは、試薬容器保持部は、複数の試薬容器を円環状に保持するように構成されている。このように構成すれば、試薬容器保持部を回転軸を中心に回転させた場合に、円環状に保持された試薬容器が円環のいずれの位置に配置されていても、全ての試薬容器を同じ移動速度で移動させることができる。これにより、試薬容器保持部の速度変化によって試薬容器内の試薬を攪拌させる際に、試薬容器の配置位置によらず、試薬容器保持部に保持された全ての試薬容器を均一に攪拌することができる。
【0020】
この発明の第2の局面における検体分析方法は、回転軸を中心に水平回転可能に構成され、試薬を収容した試薬容器を保持するための試薬容器保持部に、試薬容器を保持させるステップと、試薬容器から試薬を吸引するときには、試薬容器が試薬吸引部による試薬吸引位置に位置づけるために試薬容器保持部を一方方向に回転移動させるステップと、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させるステップと、試薬容器保持部に保持された試薬容器内の試薬と検体とから調製された測定試料を分析するステップとを備える。
【0021】
この第2の局面による検体分析方法では、上記のように、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら試薬容器保持部を一方方向へ回転移動させることによって、加速と減速とを交互に繰り返しながら試薬容器保持部を回転移動させるだけで、試薬容器内の試薬の攪拌を行うことができる。すなわち、加速と減速とを交互に繰り返しながら試薬容器保持部を回転移動させた場合には、試薬容器内の試薬は慣性によって回転移動の加速前および減速前の速さを維持しようとするため、試薬容器の速さの変化によって試薬容器内の試薬を試薬容器に対して相対的に流動させることができる。この試薬の流動に伴い、試薬の攪拌が効果的に行われる。これにより、試薬容器保持部に試薬容器を自転させる場合と比較して、検体分析に用いる装置の構造を簡略化することができる。このように本発明の検体分析方法では、検体分析に用いる装置の構造を簡略化するとともに、試薬容器に収容された試薬の攪拌を効果的に行うことができる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態による分析装置の全体構成を示した斜視図である。
【図2】図1に示した一実施形態による分析装置の全体構成を示した平面図である。
【図3】図1に示した一実施形態による分析装置の測定機構部を示したブロック図である。
【図4】図1に示した一実施形態による分析装置の測定機構部の制御部を示したブロック図である。
【図5】図1に示した一実施形態による分析装置の制御装置を示したブロック図である。
【図6】図1に示した一実施形態による分析装置の試薬設置部および反応部を示した斜視図である。
【図7】図1に示した一実施形態による分析装置の試薬設置部および反応部を示した斜視図である。
【図8】図7に示した試薬設置部および反応部の配置を模式的に示した平面図である。
【図9】図7に示した試薬設置部の外側テーブルの回転移動に関わる制御的な構成を説明するためのブロック図である。
【図10】図7に示した試薬設置部の外側テーブルによる攪拌動作のための制御を説明するための図である。
【図11】図1に示した一実施形態による分析装置の試薬開閉機構部の構成を説明するための図である。
【図12】図1に示した一実施形態による分析装置に用いられるR2試薬容器の構成を説明するための斜視図である。
【図13】図1に示した一実施形態による分析装置の外側テーブルによる攪拌動作を説明するための図である。
【図14】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するためのフローチャートである。
【図15】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するための図である。
【図16】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するための図である。
【図17】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するための図である。
【図18】図1に示した一実施形態による分析装置の試薬吸引処理動作における密封解除状態を示した断面図である。
【図19】図1に示した一実施形態による分析装置の試薬吸引処理動作を説明するための図である。
【図20】図1に示した一実施形態による分析装置の試薬吸引処理動作における密封解除状態を示した断面図である。
【図21】図1に示した一実施形態による分析装置の試薬吸引処理動作における吸引状態を示した断面図である。
【発明を実施するための形態】
【0023】
以下、本発明の実施形態を図面に基づいて説明する。
【0024】
まず、図1〜図12、図15および図18を参照して、本発明の一実施形態による分析装置1の構成について説明する。
【0025】
本発明の一実施形態による分析装置1は、血液などの検体を用いてB型肝炎、C型肝炎、腫瘍マーカおよび甲状腺ホルモンなど種々の項目の検査を行うための装置である。この分析装置1では、測定対象である血液などの検体に含まれる抗原に結合した捕捉抗体(R1試薬)に磁性粒子(R2試薬)を結合させた後に、結合(Bound)した抗原、捕捉抗体および磁性粒子を1次BF(Bound Free)分離部11(図1および図2参照)の磁石(図示せず)に引き寄せることにより、未反応(Free)の捕捉抗体を含むR1試薬を除去する。そして、磁性粒子が結合した抗原と標識抗体(R3試薬)とを結合させた後に、結合(Bound)した磁性粒子、抗原および標識抗体を2次BF分離部12の磁石(図示せず)に引き寄せることにより、未反応(Free)の標識抗体を含むR3試薬を除去する。さらに、分散液(R4試薬)、および、標識抗体との反応過程で発光する発光基質(R5試薬)を添加した後、標識抗体と発光基質との反応によって生じる発光量を測定する。このような過程を経て、標識抗体に結合する検体に含まれる抗原を定量的に測定している。
【0026】
この分析装置1は、図1および図2に示すように、測定機構部2と、測定機構部2に隣接するように配置された検体搬送部(サンプラ)3と、測定機構部2に電気的に接続されたPC(パーソナルコンピュータ)からなる制御装置4とを備えている。
【0027】
また、測定機構部2は、検体分注アーム5と、R1試薬分注アーム6と、R2試薬分注アーム7と、R3試薬分注アーム8と、反応部9と、キュベット供給部10と、1次BF分離部11と、2次BF分離部12と、ピペットチップ供給部13と、検出部14と、R4/R5試薬供給部15と、試薬設置部16とから構成されている。また、図3に示すように、測定機構部2における各機構(各種分注アーム、反応部9、試薬設置部16など)は、測定機構部2に設けられた制御部2aにより制御されている。また、検体搬送部3も制御部2aによって制御されるように構成されている。
【0028】
制御部2aは、図4に示すように、CPU2bと、ROM2cと、RAM2dと、通信インタフェース2eとから主として構成されている。CPU2bは、ROM2cに記憶されているコンピュータプログラムおよびRAM2dに読み出されたコンピュータプログラムを実行することが可能である。ROM2cは、CPU2bに実行させるためのコンピュータプログラム及び当該コンピュータプログラムの実行に用いるデータなどを記憶している。RAM2dは、ROM2cに記憶しているコンピュータプログラムの読み出しに用いられる。また、これらのコンピュータプログラムを実行するときに、CPU2bの作業領域として利用される。通信インタフェース2eは、制御装置4に接続されており、検体の光学的な情報(標識抗体と発光基質との反応によって生じる発光量のデータ)を制御装置4に送信するとともに、制御装置4の制御部4aからの信号を受信するための機能を有している。また、通信インタフェース2eは、検体搬送部3および測定機構部2の各部を駆動するためのCPU2bからの指令を送信するための機能を有している。
【0029】
検体搬送部3は、検体を収容した複数の試験管が載置されたラックを搬送可能に構成されている。また、検体搬送部3は、検体を収容した試験管を検体分注アーム5による検体吸引位置1a(図2参照)まで搬送するように構成されている。
【0030】
制御装置4は、図5に示すように、制御部4aと、表示部4bと、キーボード4cとから主として構成されたコンピュータ401によって構成されている。
【0031】
制御部4aは、CPU401aと、ROM401bと、RAM401cと、ハードディスク401dと、読出装置401eと、入出力インタフェース401fと、通信インタフェース401gと、画像出力インタフェース401hとから主として構成されている。CPU401a、ROM401b、RAM401c、ハードディスク401d、読出装置401e、入出力インタフェース401f、通信インタフェース401g、および画像出力インタフェース401hは、それぞれ、バス401iによって接続されている。
【0032】
CPU401aは、ROM401bに記憶されているコンピュータプログラムおよびRAM401cにロードされたコンピュータプログラムを実行することが可能である。そして、ハードディスク401dに記憶されたアプリケーションプログラム404aをCPU401aが実行することにより、コンピュータ401が制御装置4として機能する。
【0033】
ROM401bは、マスクROM、PROM、EPROM、EEPROMなどによって構成されており、CPU401aに実行されるコンピュータプログラムおよびこれに用いるデータなどが記録されている。
【0034】
RAM401cは、SRAMまたはDRAMなどによって構成されている。RAM401cは、ROM401bおよびハードディスク401dに記録されているコンピュータプログラムの読み出しに用いられる。また、これらのコンピュータプログラムを実行するときに、CPU401aの作業領域として利用される。
【0035】
ハードディスク401dは、オペレーティングシステムおよびアプリケーションプログラム404aなど、CPU401aに実行させるための種々のコンピュータプログラムおよびそのコンピュータプログラムの実行に用いるデータがインストールされている。
【0036】
読出装置401eは、フレキシブルディスクドライブ、CD−ROMドライブ、またはDVD−ROMドライブなどによって構成されており、可搬型記録媒体404に記録されたコンピュータプログラムまたはデータを読み出すことができる。また、可搬型記録媒体404には、免疫分析用のアプリケーションプログラム404aが格納されており、コンピュータ401がその可搬型記録媒体404からアプリケーションプログラム404aを読み出し、そのアプリケーションプログラム404aをハードディスク401dにインストールすることが可能である。
【0037】
なお、上記アプリケーションプログラム404aは、可搬型記録媒体404によって提供されるのみならず、電気通信回線(有線、無線を問わない)によってコンピュータ401と通信可能に接続された外部の機器から上記電気通信回線を通じて提供することも可能である。たとえば、上記アプリケーションプログラム404aがインターネット上のサーバコンピュータのハードディスク内に格納されており、このサーバコンピュータにコンピュータ401がアクセスして、そのアプリケーションプログラム404aをダウンロードし、これをハードディスク401dにインストールすることも可能である。
【0038】
また、ハードディスク401dには、たとえば、米マイクロソフト社が製造販売するWindows(登録商標)などのグラフィカルユーザインタフェース環境を提供するオペレーティングシステムがインストールされている。
【0039】
入出力インタフェース401fは、たとえば、USB、IEEE1394、RS−232Cなどのシリアルインタフェース、SCSI、IDE、IEEE1284などのパラレルインタフェース、およびD/A変換器、A/D変換器などからなるアナログインタフェースなどから構成されている。入出力インタフェース401fには、キーボード4cが接続されており、ユーザがそのキーボード4cを使用することにより、コンピュータ401にデータを入力することが可能である。
【0040】
通信インタフェース401gは、たとえば、Ethernet(登録商標)インタフェースである。コンピュータ401は、その通信インタフェース401gにより、所定の通信プロトコルを使用して測定機構部2との間でデータの送受信が可能である。
【0041】
画像出力インタフェース401hは、LCDまたはCRTなどで構成された表示部4bに接続されており、CPU401aから与えられた画像データに応じた映像信号を表示部4bに出力するようになっている。
【0042】
表示部4bは、検出部14による検出値に基づいて得られる分析結果などを表示するために設けられている。
【0043】
キュベット供給部10は、複数のキュベットを収納可能に構成されており、検体分注アーム5による検体吐出位置1bにキュベットを1つずつ順次供給する機能を有している。
【0044】
R1試薬分注アーム6は、試薬設置部16に設置されたR1試薬を吸引し、吸引したR1試薬を検体吐出位置1bに載置されたキュベットに分注(吐出)するように構成されている。また、R1試薬分注アーム6には、図2に示すように、R1試薬の吸引および吐出を行うためのピペット6aが取り付けられている。また、R1試薬分注アーム6は、図示しないキャッチャにより検体吐出位置1bに載置されたキュベットを反応部9に移送する機能を有している。
【0045】
ピペットチップ供給部13は、投入された複数のピペットチップ(図示せず)を1つずつ検体分注アーム5によるチップ装着位置まで搬送する機能を有している。そして、ピペットチップは、チップ装着位置において、検体分注アーム5のピペット先端に取り付けられる。
【0046】
検体分注アーム5は、チップ装着位置においてピペットチップを装着した後、検体搬送部3により検体吸引位置1aに搬送された試験管内の検体を吸引し、R1試薬分注アーム6によりR1試薬が分注された検体吐出位置1bのキュベットに検体を分注(吐出)する機能を有している。
【0047】
R2試薬分注アーム7は、試薬設置部16に設置されたR2試薬を吸引する機能を有している。また、R2試薬分注アーム7は、R1試薬および検体を収容するキュベットに吸引したR2試薬を分注(吐出)するように構成されている。また、R2試薬分注アーム7には、図2に示すように、R2試薬の吸引および吐出を行うためのピペット7aが取り付けられている。
【0048】
反応部9は、図1、図2、図6および図7に示すように、平面的に見て円形形状を有する試薬設置部16の周囲を取り囲むように中空の円形形状に形成されている。また、反応部9は、外形に沿って所定間隔に配置された複数のキュベット設置部9aを有し、キュベット設置部9aは、キュベットを挿入可能なように円形形状で凹状に形成されている。また、反応部9は、キュベット設置部9aにセットされたキュベットを約42℃に加温する機能を有している。すなわち、反応部9において、キュベットに収容された試料は約42℃に加温される。これにより、キュベット内の検体と各種試薬との反応が促進される。また、反応部9は、時計回り方向(矢印A1方向)に回転可能に構成されており、キュベット設置部9aにセットされたキュベットを、各種処理(試薬の分注など)が行われるそれぞれの処理位置まで移動させる機能を有している。
【0049】
1次BF分離部11は、検体、R1試薬およびR2試薬を収容するキュベットを図示しないキャッチャにより反応部9から1次BF分離部11に移送した後、キュベット内の試料から未反応のR1試薬(不要成分)と磁性粒子とを分離(B/F分離)するように構成されている。
【0050】
R3試薬分注アーム8は、試薬設置部16に設置されたR3試薬を吸引する機能を有している。また、R3試薬分注アーム8は、1次BF分離部11によるB/F分離後の試料を収容するキュベットが1次BF分離部11から反応部9に移送されると、吸引したR3試薬をそのキュベットに分注(吐出)するように構成されている。また、R3試薬分注アーム8には、図2に示すように、R3試薬の吸引および吐出を行うためのピペット8aが取り付けられている。
【0051】
2次BF分離部12は、1次BF分離部11によるB/F分離後の試料およびR3試薬を収容するキュベットを図示しないキャッチャにより反応部9から2次BF分離部12に移送した後、キュベット内の試料から未反応のR3試薬(不要成分)と磁性粒子とを分離するように構成されている。
【0052】
R4/R5試薬供給部15は、図示しないチューブにより、2次BF分離部12によるB/F分離後の試料を収容するキュベットに、R4試薬およびR5試薬を順に分注するように構成されている。
【0053】
検出部14は、所定の処理が行なわれた検体の抗原に結合する標識抗体と発光基質との反応過程で生じる光を光電子増倍管(Photo Multiplier Tube)で取得することにより、その検体に含まれる抗原の量を測定するために設けられている。
【0054】
試薬設置部16は、図7に示すように、捕捉抗体を含むR1試薬が収容されるR1試薬容器100、磁性粒子を含むR2試薬が収容されるR2試薬容器110および標識抗体を含むR3試薬が収容されるR3試薬容器120を設置するために設けられている。また、試薬設置部16は、図2および図6に示す円形状のカバー部161と、図3に示すバーコードリーダ162と、図7に示す内側テーブル163および外側テーブル164と、図6に示すR1試薬開閉機構部17、R2試薬開閉機構部18およびR3試薬開閉機構部19とを含んでいる。
【0055】
カバー部161は、図2および図6に示すように、試薬設置部16および反応部9の両方を覆うように配置されている。また、円形状のカバー部161には、所定の箇所に開口部が設けられており、開口部を介してキュベットの移動やピペットによる分注処理が行われる。バーコードリーダ162は、試薬設置部16に設置された各試薬容器100、110、120に貼付されたバーコード(図示せず)を読み取る機能を有している。バーコードには、各試薬固有の情報が含まれている。なお、バーコードリーダ162によるバーコード読み取り動作は、分析装置1の初期化を行った際に、測定機構部2の各部の動作チェック、および、後述するテーブル163、164の原点出しを行った後に実行される。そして、バーコードリーダ162により読み取られた情報は、テーブル163、164上での試薬容器の位置情報と関連付けられて、制御装置4のハードディスク401dに記憶される。
【0056】
内側テーブル163は、図7に示すように、複数のR1試薬容器100および複数のR3試薬容器120を保持可能に構成されており、平面的に見て中空の円環状に形成されている。内側テーブル163上のR1試薬容器100は、円環状に配列されたR3試薬容器120の外側を取り囲むように円環状に配列されている。また、R1試薬容器100は、半径方向にR3試薬容器120に隣接して配置されている。つまり、図8に示すように、内側テーブル163において、円環状に保持されたR1試薬容器100に対する後述する回転軸16a(内側テーブル163の中央)からの距離L1は、R3試薬容器120に対する回転軸16a(内側テーブル163の中央)からの距離L3よりも大きい。また、内側テーブル163は、回転軸16aを中心に時計回り方向(矢印A1方向)および反時計回り方向(矢印A2方向)に水平に回転可能に構成されている。具体的には、内側テーブル163は、ドライバ基板2e(図3参照)を介して制御部2aにより制御される第1ステッピングモータ163a(図3参照)によって回転軸16aを中心に回転されるように構成されている。内側テーブル163が回転(回動)されると、R1試薬容器100およびR3試薬容器120は互いに同方向に同角度回転(回動)される。これにより、内側テーブル163は、R1試薬を収容するR1試薬容器100およびR3試薬を収容するR3試薬容器120を、それぞれ所定のR1試薬吸引位置P1およびR3試薬吸引位置P3に移動させるように構成されている。
【0057】
また、内側テーブル163の所定の位置には、試薬設置部16に取り付けられた磁石(図示せず)を検知する磁気センサからなる第1ホール素子163b(図3参照)が設けられている。また、第1ステッピングモータ163aの回転軸には、モータの回転角度を検知する光学センサからなる第1エンコーダ163cが設けられている。これらの第1ホール素子163bおよび第1エンコーダ163cを用いて、内側テーブル163の原点出し(原点の位置合わせ)が行われる。
【0058】
外側テーブル164は、図7および図8に示すように、複数のR2試薬容器110を保持可能に構成されており、内側テーブル163の外側を取り囲むように中空の円環状に形成されている。また、外側テーブル164は、内側テーブル163が保持可能なR1試薬容器100およびR3試薬容器120のそれぞれの個数と同じ個数のR2試薬容器110を保持可能に構成されている。外側テーブル164上の複数のR2試薬容器110は、円環状に配列されたR1試薬容器100の外側を取り囲むように円環状に配列されている。また、外側テーブル164は、回転軸16aを中心に、時計回り方向(矢印A1方向)および反時計回り方向(矢印A2方向)に水平に回転可能に構成されている。具体的には、図9に示すように、外側テーブル164は、ドライバ基板2fを介して制御部2aにより制御される第2ステッピングモータ164a(図3参照)によって回転軸16aを中心に回転されるように構成されている。したがって、図8に示すように、外側テーブル164は、外側テーブル164に対する回転軸16aからの距離(R2試薬容器110に対する回転軸16aからの距離)L2が、内側テーブル163に対する回転軸16aからの距離よりも大きくなるような位置に、回転可能に設けられている。なお、本実施形態では、このR2試薬容器110に対する回転軸16aからの距離L2は、約175.5mmである。また、外側テーブル164は、内側テーブル163とは独立して回転可能であり、R1試薬容器100およびR3試薬容器120の回転(回動)の速さおよび方向に影響されることなくR2試薬容器110を任意の方向および速さで回転(回動)させることが可能である。
【0059】
ここで、磁性粒子を含むR2試薬は、試薬内の磁性粒子を均一に分散させておくために攪拌する必要がある。このため、本実施形態では、外側テーブル164は、外側テーブル164が保持するR2試薬容器110に収容されたR2試薬を攪拌しながら回転(回動)する機能を有している。攪拌動作時(R2試薬の吸引動作を行わない時)には、外側テーブル164は、回転軸16aを中心として、R2試薬容器110に収容されたR2試薬を攪拌可能なように一方方向(矢印A1方向)に間欠回転移動するように構成されている。詳細には、図9に示すように、外側テーブル164は、CPU2bから出力される制御信号に基づき、ドライバ基板2fが所定のパルス電流(パルス信号)を第2ステッピングモータ164aに印加することにより、外側テーブル164の回転移動(第2ステッピングモータ164aの回転駆動)が制御されるように構成されている。ドライバ基板2fは、駆動方式(矩形駆動および台形駆動)や駆動パルス数などの設定値を格納する駆動パターン記憶部2hを含み、これらの設定値がCPU2bにより設定されるように構成されている。これにより、外側テーブル164は、外側テーブル164が保持するR2試薬容器110に収容されたR2試薬の攪拌を行うための攪拌動作と、R2試薬容器110に収容されたR2試薬をR2試薬分注アーム7によって吸引するための所定のR2試薬吸引位置P2への移動動作との、2通りの動作制御がCPU2bおよびドライバ基板2fによって行われるように構成されている。
【0060】
R2試薬の攪拌動作は、外側テーブル164が停止している状態と一方方向(矢印A1方向)に回転移動している状態とを周期的に切り替えながら、外側テーブル164を一方方向(矢印A1方向)に間欠的に回転移動させる動作である。より詳細には、R2試薬の撹拌動作は、外側テーブル164が停止している状態から外側テーブル164の回転移動を開始させる加速工程と、外側テーブル164を減速させて外側テーブル164を停止させる減速工程とを交互に繰り返しながら、外側テーブル164を一方方向に回転移動させる動作である。この際、CPU2b(ドライバ基板2f)は、R2試薬容器110内においてR2試薬を攪拌可能な慣性力をR2試薬に作用させることができるように、第2ステッピングモータ164aの駆動制御を行うように構成されている。本実施形態では、CPU2b(ドライバ基板2f)は、外側テーブル164が停止している状態と一方方向(矢印A1方向)に回転移動している状態との切り替えを行うように第2ステッピングモータ164aを駆動させるように構成されている。
【0061】
攪拌動作時において、CPU2b(ドライバ基板2f)は、試薬吸引時に外側テーブル164を回転移動させる際の第2ステッピングモータ164aの駆動方式である台形駆動方式よりも外側テーブル164の回転移動を急激に加速および減速させる矩形駆動方式により、第2ステッピングモータ164aを駆動させている。具体的には、図10に示すように、ドライバ基板2fは、1500pps(pulses per second:1秒あたりにステッピングモータに印加するパルス数)の速さ(以下、「パルス速度(pps)」という)で130パルス分(130/1500=約0.086秒間)のパルス電流を第2ステッピングモータ164aに印加(回転移動状態)した後、約0.114秒間パルス電流の印加を停止(停止状態)する動作を1単位の攪拌動作として、第2ステッピングモータ164aを駆動するように構成されている。この際、外側テーブル164が停止している状態から第2ステッピングモータ164aにパルス速度1500ppsのパルス電流を印加し、その印加状態を0.086秒間続けた後、第2ステッピングモータ164aへのパルス電流の印加を0.014秒間停止させるという1単位の攪拌動作制御における第2ステッピングモータ164aの駆動速度の変化が、略矩形状となる。そして、ドライバ基板2f(CPU2b)は、この1単位の攪拌動作を約0.2秒間(0.086秒+0.114秒)の周期で繰り返し行うように第2ステッピングモータ164aの駆動制御を行うように構成されている。
【0062】
また、外側テーブル164は、第2ステッピングモータ164aが130パルス分だけ駆動されることによって、1単位の攪拌動作により約3.25度だけ矢印A1方向に回転移動するように構成されている。このように、第2ステッピングモータ164aの駆動状態は、第2ステッピングモータ164aにパルス電流を印加していない状態からパルス速度1500ppsのパルス電流を第2ステッピングモータ164aに印加している状態(またはパルス速度1500ppsのパルス電流を第2ステッピングモータ164aに印加している状態から第2ステッピングモータ164aにパルス電流を印加していない状態)に瞬間的に切り替えられるため、外側テーブル164の動作は、急加速と急停止とを周期的に繰り返しながら約3.25度の角度ずつ矢印A1方向に回転するような回転移動動作となる。CPU2b(ドライバ基板2f)は、R2試薬の吸引のためのR2試薬吸引位置P2への移動動作などを除き、このR2試薬の攪拌動作制御を常時実施するように構成されている。したがって、分析装置1が分析動作を実行可能なスタンバイ状態にあれば、外側テーブル164は、R2試薬の攪拌動作を行うことによってR2試薬容器110内の磁性粒子を均一に分散させておくように構成されている。
【0063】
一方、R2試薬吸引位置P2への移動動作は、外側テーブル164を矢印A1方向に回転させて、吸引対象のR2試薬を収容したR2試薬容器110を所定位置まで移動させる動作である。この際、CPU2b(ドライバ基板2f)は、台形駆動により第2ステッピングモータ164aを駆動させる制御を行うように構成されている。すなわち、CPU2b(ドライバ基板2f)は、R2試薬撹拌時の外側テーブル164の加速度よりも小さい等加速度の加速期間(パルス速度(pps)を徐々に増加させる期間)と、等速回転期間(パルス速度(pps)一定の期間)と、R2試薬撹拌時の外側テーブル164の減速度よりも小さい等減速度の減速期間(パルス速度(pps)を徐々に減少させる期間)とを含むように第2ステッピングモータ164aを駆動させるように構成されている。なお、これらの加速期間、等速回転期間、および減速期間の長さは、吸引対象のR2試薬容器110の位置(R2試薬容器110からR2試薬吸引位置P2までの距離)により異なる。
【0064】
また、外側テーブル164の所定の位置には、試薬設置部16に取り付けられた磁石(図示せず)を検知する磁気センサからなる第2ホール素子164b(図3参照)が設けられている。また、第2ステッピングモータ164aの回転軸には、モータの回転角度を検知する光学センサからなる第2エンコーダ164cが設けられている。これらの第2ホール素子164bおよび第2エンコーダ164cを用いて、外側テーブル164の原点出し(原点の位置合わせ)が行われる。
【0065】
R1試薬開閉機構部17、R2試薬開閉機構部18およびR3試薬開閉機構部19は、それぞれ、同様の構成を有している。ここでは、R2試薬開閉機構部18の構成について説明する。
【0066】
R2試薬開閉機構部18は、図11に示すように、密封解除部181と、蓋部材移動部182と、開口密封部183とを含んでいる。
【0067】
密封解除部181は、カバー部161上に設置された第3エアシリンダ181aと、軸部181bと、取付部181cと、解除ローラ181dと、ローラ軸181eとを有している。また、軸部181bは、第3エアシリンダ181aから円形状のカバー部161の半径方向に延びるように設けられており、ローラ軸181eは、軸部181bの下方側(矢印Z2方向側)で、軸部181bに平行(水平)にカバー部161の半径方向に延びるように配置されている。また、軸部181bとローラ軸181eとは、取付部181cにより連結されている。解除ローラ181dは、ローラ軸181eを回転中心として回転可能に構成されている。また、解除ローラ181dは、外側テーブル164に保持されたR2試薬容器110の後述する蓋部材130の凸部131(図18参照)に当接する高さに配置されている。また、密封解除部181は、第3エアシリンダ181aが駆動されることによって、軸部181b、取付部181cおよびローラ軸181eを介して、解除ローラ181dがカバー部161の半径方向(図15の矢印X1およびX2方向)に水平に直線移動されるように構成されている。これにより、解除ローラ181dを蓋部材130の凸部131に当接する位置と当接しない位置とに移動させることが可能となる。
【0068】
蓋部材移動部182は、図11に示すように、カバー部161上に配置された第4エアシリンダ182aと、軸部182bと、押圧部材182cとを含んでいる。また、図18に示すように、軸部182bは、第4エアシリンダ182aから鉛直下方向(矢印Z2方向)に延びるように設けられており、押圧部材182cは、軸部182bの下側端部に取り付けられている。また、押圧部材182cは、外側テーブル164に保持されたR2試薬容器110の蓋部材130の上方(矢印Z1方向側)で、平面的に見て、R2試薬容器110の凸部131の移動経路上に配置されている。また、蓋部材移動部182は、第4エアシリンダ182aが駆動されることによって、軸部182bを介して押圧部材182cが鉛直方向(矢印Z1およびZ2方向)に直線移動されるように構成されている。これにより、押圧部材182cによって、所定位置にある蓋部材130の凸部131を下方(矢印Z2方向)に押圧することが可能となる。
【0069】
図11に示すように、開口密封部183は、取付部183aと、ローラ軸183bと、2つのローラ183cとを含んでいる。取付部183aは、カバー部161(図6参照)の裏面に取り付けられており、ローラ軸183bは、取付部183aに支持されている。また、2つのローラ183cは、ローラ軸183bを回転中心として回転可能に構成されている。また、2つのローラ183cは、外側テーブル164に保持されたR2試薬容器110の後述する蓋部材130の上面132a(図12参照)に当接するように配置されている。また、2つのローラ183cは、外側テーブル164の回転(回動)移動に伴って移動されるR2試薬容器110の蓋部材130に当接することによって、R2試薬容器110を密封状態に戻す機能を有している。本実施形態では、開口密封部183は、外側テーブル164の回転軸16aを中心とした矢印A1方向の回転動作(攪拌動作およびR2試薬吸引位置P2への移動動作)を利用して、R2試薬容器110の蓋部材130の密封状態を常に確保するように構成されている。また、図15に示すように、2つのローラ183cは、R2試薬容器110の蓋部材130の凸部131に当接しないように所定の間隔を隔てて設けられており、R2試薬容器110の凸部131は、平面的に見て、外側テーブル164の回転(回動)移動に伴って2つのローラ183cの離間部を通過する。
【0070】
なお、図6に示すように、R1試薬開閉機構部17の密封解除部171およびR3試薬開閉機構部19の密封解除部191は、それぞれ、R2試薬開閉機構部18の密封解除部181に対応するとともに、R1試薬開閉機構部17の第1エアシリンダ171aおよびR3試薬開閉機構部19の第5エアシリンダ191aは、それぞれ、R2試薬開閉機構部18の第3エアシリンダ181aに対応している。また、R1試薬開閉機構部17の軸部171bおよびR3試薬開閉機構部19の軸部191bは、それぞれ、R2試薬開閉機構部18の軸部181bに対応している。また、R1試薬開閉機構部17の蓋部材移動部172およびR3試薬開閉機構部19の蓋部材移動部192は、それぞれ、R2試薬開閉機構部18の蓋部材移動部182に対応するとともに、R1試薬開閉機構部17の第2エアシリンダ172aおよびR3試薬開閉機構部19の第6エアシリンダ192aは、それぞれ、R2試薬開閉機構部18の第4エアシリンダ182aに対応している。また、R1試薬開閉機構部17およびR3試薬開閉機構部19は、それぞれ、図示しないが、R2試薬開閉機構部18の密封解除部181の取付部181c、解除ローラ181d、ローラ軸181e、蓋部材移動部182の軸部182b、押圧部材182c、および、開口密封部183の取付部183a、ローラ軸183b、2つのローラ183cに対応する構成を有している。
【0071】
図12および図15を参照して、本発明の一実施形態による分析装置1に用いられるR2試薬容器110の構成について説明する。
【0072】
図12に示すように、R2試薬容器110は、容器本体111と、容器本体111を密閉する蓋部材130と、蓋部材130を回動可能に支持する支持部材140とを含んでいる。
【0073】
R2試薬容器110の容器本体111は、上側に略円筒形状に形成された円筒部112を有するとともに、下側に試薬を収容する収容部113を有している。円筒部112の上端部には、円形形状の開口部112aが設けられており、円筒部112の側面には、水平方向に延びる一対の切欠溝112bが左右対称に形成されている。この切欠溝112bに支持部材140の後述するアーム部140bが係合されることによって、支持部材140が容器本体111に取り付けられる。
【0074】
蓋部材130は、図12に示すように、凸部131と、本体部132と、凸部131を支持する基台部133と、一対の回動部134とを有している。凸部131は、平面的に見て略T字形状の基台部133上に形成されており、蓋部材130の後方側(矢印Y2方向側)に配置されている。また、凸部131は、本体部132の上面132aよりも上側に突出するように形成されている。また、凸部131は、平面的に見て、矢印Y1およびY2方向に延びる長方形状(図15参照)を有し、上述の開口密封部183の2つのローラ183cの離間距離よりも小さい矢印X1およびX2方向の幅に形成されている。
【0075】
本体部132は、図15に示すように、平面的に見て、前方側(図12の矢印Y1方向側)が半円形状に形成されるとともに、後方側が矩形形状に形成されている。また、図12に示すように、本体部132は、実質的に本体部132の外形に沿って下方に向かって延びる側壁部132bと、上面132aに形成された略円錐形状の凹部132cとを有している。
【0076】
基台部133は、図12に示すように、平面的に見て、略T字形状(図15参照)を有し、凸部131を支持する機能を有している。また、基台部133は、本体部132の後方側(矢印Y2方向側)に配置されている。
【0077】
一対の回動部134は、それぞれ、図12に示すように、本体部132の後方側で、本体部132と略T字形状の基台部133の左右に延びる部分との間に配置されている。また、回動部134には図示しない軸受部が形成されている。回動部134の軸受部に支持部材140の図示しない軸部を嵌め込むことによって、蓋部材130は、軸部(回動部134)を回動中心として回動可能となる。これにより、凸部131と本体部132とは、回動中心(回動部134)に対して互いに反対側に位置するので、凸部131を下方に移動させることによって、本体部132側を上方に移動させることが可能となる。
【0078】
支持部材140は、一対のアーム部140bを有している。また、支持部材140は、図示しない一対の軸部によって、蓋部材130が回動部134を中心に回動可能な状態で蓋部材130と係合するように構成されている。一対のアーム部140bは、それぞれ、容器本体111の円筒部112の切欠溝112bに係合するように構成されている。これにより、図12に示すように、蓋部材130は、支持部材140を介して容器本体111の円筒部112に取り付けられる。
【0079】
なお、R1試薬容器100およびR3試薬容器120も、上述のR2試薬容器110と同様の蓋部材130および支持部材140とを含んでいる。したがって、R1試薬容器100およびR3試薬容器120は、R2試薬容器110の蓋部材130の開閉を行うR2試薬開閉機構部18と同様に構成されたR1試薬開閉機構部17およびR3試薬開閉機構部19によって、それぞれ蓋部材130の開閉を行うことが可能なように構成されている。
【0080】
次に、図8〜図10および図13を参照して、本実施形態による分析装置1の外側テーブル164によるR2試薬の攪拌動作について説明する。
【0081】
図13に示すように、まず、タイミングT1において、初期状態として外側テーブル164が停止状態にあり、R2試薬容器110内の試薬液面も略水平の状態にあるとする。この状態から、図9に示すように、CPU2bから出力される制御信号に基づき、ドライバ基板2fからパルス速度1500ppsのパルス電流が第2ステッピングモータ164aに印加されることにより、攪拌動作が開始される。
【0082】
タイミングT2では、ドライバ基板2fから第2ステッピングモータ164aに1500ppsでパルス電流が印加されることにより、第2ステッピングモータ164aの回転速度が1500ppsに立ち上がる。この際、図10に示したように、第2ステッピングモータ164aは、パルス電流が印加されていない状態から瞬間的にパルス速度1500ppsのパルス電流が印加されている状態に切り替わるため、外側テーブル164は矢印A1方向に急加速して回転軸16a(図8参照)を中心に回転移動を開始する。なお、1500ppsのパルス電流の印加状態は0.086秒間継続し、この間に外側テーブル164は等速回転状態となる。図13に示すように、外側テーブル164の回転移動に伴って、R2試薬容器110も矢印A1方向に移動する一方、R2試薬容器110内のR2試薬は、慣性によりその場に留まろうとする。この結果、R2試薬容器110内のR2試薬は、進行方向(矢印A1方向)とは逆方向(矢印A2方向)の内壁面によって押し出されるようにして移動(流動)する。矢印A1方向への移動のためのパルス電流の印加が約0.086秒間(1500ppsで130パルス分)継続されると、タイミングT3において、第2ステッピングモータ164aへのパルス電流の印加が停止され、外側テーブル164は急減速して停止する。なお、タイミングT2からタイミングT3までの矢印A1方向へ約0.086秒間(1500ppsで130パルス分)のパルス電流の印加によって、外側テーブル164は回転軸16aを中心に矢印A1方向に約3.25度回転移動する。
【0083】
このタイミングT3では、第2ステッピングモータ164aへのパルス電流の停止に伴い、外側テーブル164の矢印A1方向の回転移動は急停止する。外側テーブル164の停止に伴って、R2試薬容器110も停止する一方、R2試薬容器110内のR2試薬は、慣性により矢印A1方向に移動し続けようとする。この結果、進行方向とは逆方向(矢印A2方向)の内壁面側に押し付けられていたR2試薬は、逆にR2試薬容器110に対して相対的に矢印A1方向側に向かって移動(流動)し、R2試薬容器110の矢印A1方向側の内壁面に押し付けられるように移動(流動)する。ただし、タイミングT2でR2試薬が矢印A2方向に移動していたため、R2試薬容器110内のR2試薬は、粘性などによって一部を容器の矢印A2方向側の内壁面に残したまま、引きずるようにして矢印A1方向側へ移動する。第2ステッピングモータ164aへのパルス電流の停止状態は約0.114秒間継続して、1単位の攪拌動作制御が完了する。そして、約0.114秒間の停止状態の後、タイミングT4において、ドライバ基板2f(CPU2b)により、再び第2ステッピングモータ164aにパルス速度1500ppsのパルス電流の印加が開始される。
【0084】
タイミングT4では、タイミングT2と同様に、外側テーブル164が急加速して、回転軸16a(図8参照)を中心に矢印A1方向に回転移動を開始する。この結果、R2試薬容器110内の試薬液面は、慣性によって進行方向(矢印A1方向)とは逆方向(矢印A2方向)の内壁面に押し付けられるように移動(流動)する。この際にも、タイミングT3でR2試薬が矢印A1方向に移動していたため、R2試薬容器110内のR2試薬は、粘性などによって一部を容器の矢印A1方向側の内壁面に残したまま、引きずるようにして矢印A2方向側へ移動する。このようにして、R2試薬容器110内のR2試薬は、外側テーブル164の急加速と急停止とによってR2試薬容器110内を矢印A1方向側と矢印A2方向側とに揺動されることにより、試薬内の磁性粒子が攪拌され始める。
【0085】
その後、タイミングT2(T4)における約0.086秒間のパルス電流印加状態と、タイミングT3における約0.114秒間のパルス電流停止状態とからなる攪拌動作制御が約0.2秒周期で繰り返されると、揺動されたR2試薬が容器の内壁面に押し付けられることによって、R2試薬容器110内の試薬液面は中央部が凹んだすり鉢状形状になる。さらに、外側テーブル164による半径L2、角度約3.25度の間欠的な回転移動が繰り返されることによって、R2試薬容器110内のR2試薬は、R2試薬容器110の内壁面に沿って試薬液面が周方向に回転しながら流動する。このようにして、R2試薬容器110内の試薬に含まれる磁性粒子が攪拌され、試薬内で均一に分散される。また、このような方法で攪拌動作を行うことにより試薬容器内の試薬の液跳ねを抑制することも可能である。なお、上述のように、130パルス分の回転移動によって外側テーブル164は約3.25度回転するとともに、1単位(パルス電流印加状態およびパルス電流停止状態を各1回)の攪拌動作制御に要する時間は、約0.2秒間である。このため、攪拌動作中には、外側テーブル164が1周回転するまでに約111回(360/3.25)の攪拌動作制御が実施され、この1周分の攪拌動作に要する時間は、約0.2×111=約22.2秒となる。
【0086】
次に、図4および図15〜図21を参照して、本実施形態による分析装置1のR2試薬吸引処理動作について説明する。
【0087】
本実施形態では、外側テーブル164はR2試薬の攪拌動作を継続的に実施しているとともに、測定機構部2の各部において各種の処理を行っている。すなわち、本実施形態では、R2試薬吸引位置への移動動作中およびR2試薬分注アーム7によるR2試薬の吸引動作中を除いて、常時R2試薬の攪拌動作が実施されている。この際、図15に示すように、R2試薬容器110は時計回り方向(矢印A1方向)に間欠的に回転(回動)されており、蓋部材130は開口密封部183の2つのローラ183cに当接される。これにより、R2試薬容器110は、蓋部材130が上方から押圧されるので、開口部112aの密封状態が緩むのを抑制される。この際、解除ローラ181dは、凸部131に当接しない位置に配置されている。
【0088】
そして、R2試薬の吸引処理を行う際には、ステップS1において、外側テーブル164によるR2試薬の攪拌動作が停止される。次に、ステップS2において、制御部2aのCPU2b(図4参照)により外側テーブル164が回転軸16aを中心に矢印A1方向に回転移動されることによって、吸引対象のR2試薬容器110の移動が開始される。この際、外側テーブル164の第2ステッピングモータ164aは、CPU2b(ドライバ基板2f)により、R2試薬の攪拌時よりも外側テーブル164の回転移動の加速度および減速度が小さくなる台形駆動方式で駆動される。
【0089】
ステップS3では、制御部2aのCPU2b(図4参照)により、吸引対象のR2試薬容器110が所定位置に到着したか否かが判断される。具体的には、図16に示すように、R2試薬容器110の凸部131が解除ローラ181dを通過した後、2つのローラ183cの近傍に到着したときに、R2試薬容器110が所定位置に到着したと判断される。次に、ステップS4において、CPU2bにより第3エアシリンダ181aが駆動されることによって、解除ローラ181dが凸部131に当接する位置(図16参照)まで水平移動される。
【0090】
そして、ステップS5において、外側テーブル164が反時計回り方向(矢印A2方向)に回動されて、R2試薬吸引位置P2まで移動される。この際、図17に示すように、解除ローラ181dが蓋部材130の本体部132側から凸部131に当接される。そして、R2試薬容器110の移動が、さらに反時計回り方向(矢印A2方向)に継続されることによって、図18に示すように、蓋部材130は、解除ローラ181dにより凸部131側が徐々に下方に押し下げられ、それに伴って蓋部材130の本体部132側が徐々に上方に移動される。そして、解除ローラ181dが凸部131の頂部に到達することにより、R2試薬容器110内に外気が流入してR2試薬容器110の外部と内部との気圧差がなくなり、蓋部材130が開口部112aを覆った状態でR2試薬容器110の密封状態が解除される。
【0091】
そして、R2試薬容器110の凸部131が押圧部材182cの下方に到着(R2試薬吸引位置P2に到着)すると、ステップS6において、解除ローラ181dは、図19に示すように、凸部131に当接しない元の位置まで戻される。その後、ステップS7において動作を所定時間休止した後、ステップS8において、図20に示すように、CPU2bにより第4エアシリンダ182aが駆動されることによって、蓋部材移動部182の押圧部材182cが下降される。これにより、押圧部材182cによって、凸部131が下方に押圧される。凸部131が下方に押圧されると、蓋部材130の回動中心に対して凸部131とは反対側に位置する本体部132側(開口部112a側)が上方に移動される。このようにして蓋部材130が開口部112aを覆わない位置まで移動されることによって、図21に示すように、R2試薬容器110の開口部112aが開放される。
【0092】
その後、ステップS9において、R2試薬分注アーム7のピペット7aがR2試薬容器110の開口部112aを介して容器本体111に挿入されるとともに、ピペット7aにより所定量のR2試薬が吸引される。そして、R2試薬の吸引終了後、ステップS10において、押圧部材182cが上方に向かって移動される。これにより、開放状態が解除されて、蓋部材130が開口部112aを覆う位置まで戻される。以上により、試薬吸引処理動作が完了する。
【0093】
その後、CPU2b(ドライバ基板2f)により外側テーブル164が再び矢印A1方向に回転(回動)され、R2試薬の攪拌動作が開始される。これにより、密封解除状態にある蓋部材130は、進行方向側に位置する2つのローラ183cに当接する(図15参照)ことによって、下方への押圧力を受けて、R2試薬容器110は密封状態に戻される。なお、上記ステップS4〜ステップS10までの一連の動作は、約2秒以内に行われる。
【0094】
なお、R2試薬以外のR1試薬、R3試薬の吸引処理動作は、攪拌動作を除いてそれぞれ同様である。したがって、磁性粒子を含まないR1試薬およびR3試薬の吸引処理動作では、ステップS1の処理(攪拌動作停止)が行われることなく、ステップS2以降の処理が行われる。また、R1試薬およびR3試薬の吸引処理動作では、内側テーブル163が外側テーブル164とは独立して回転してR1試薬吸引位置P1およびR3試薬吸引位置P3のそれぞれへの移動が行われる。
【0095】
本実施形態では、上記のように、試薬の吸引を行わないときには、加速(パルス電流停止状態から1500ppsのパルス電流印加状態への切り替え)と減速(パルス電流印加状態からパルス電流停止状態への切り替え)とを交互に繰り返しながら外側テーブル164を矢印A1方向に回転移動させるよう、CPU2b(ドライバ基板2f)が第2ステッピングモータ164aを制御することによって、加速と減速とを交互に繰り返しながら外側テーブル164を矢印A1方向に間欠的に回転移動させるだけで、R2試薬容器110内の試薬の攪拌を行うことができる。すなわち、加速と減速とを交互に繰り返しながら外側テーブル164aを回転移動させた場合には、R2試薬容器110内のR2試薬は慣性によって回転移動の加速前および減速前の速さを維持しようとするため、R2試薬容器110の速さの変化によってR2試薬容器110内のR2試薬をR2試薬容器110に対して相対的に流動させることができる。このR2試薬の流動に伴い、R2試薬の攪拌が効果的に行われる。これにより、外側テーブルに試薬容器を自転させる構造を設ける場合と比較して、分析装置1の構造を簡略化することができる。このように本発明の一実施形態による分析装置1では、装置の構造を簡略化するとともに、R2試薬容器110に収容されたR2試薬の攪拌を効果的に行うことができる。
【0096】
また、本実施形態では、上記のように、回転停止状態とパルス速度1500ppsでの回転移動状態とを切り替えながら、外側テーブル164が矢印A1方向に間欠回転移動するように、CPU2b(ドライバ基板2f)が第2ステッピングモータ164aを制御することによって、容易に、回転停止状態と回転移動状態との速さの差を大きくすることができる。つまり、回転停止状態から1500ppsでの回転移動状態への加速および1500ppsでの回転移動状態から回転停止状態への減速によって、回転移動状態における回転移動の速さを大きくしなくても、容易に加速度および減速度を大きくすることができる。これにより、より容易に、R2試薬容器110内のR2試薬により大きな慣性力を作用させることができる。
【0097】
また、本実施形態では、上記のように、CPU2b(ドライバ基板2f)が、第2ステッピングモータ164aへのパルス電流の印加停止状態を約0.114秒間継続させるとともに、第2ステッピングモータ164aへのパルス速度1500ppsのパルス電流の印加状態を約0.086秒間継続させるように、第2ステッピングモータ164aを制御することによって、外側テーブル164の回転停止状態および回転移動状態が短い期間で切り替わるので、図13に示したようにR2試薬容器110内において移動(流動)した状態にあるR2試薬を落ち着かせることなく攪拌することができる。このため、たとえばステッピングモータへのパルス電流の印加状態に切り替えて試薬容器内の試薬を流動させた後、試薬の流動が落ち着いてからステッピングモータへのパルス電流の印加停止状態に切り替える場合と比較して、より効果的にR2試薬容器110内のR2試薬を攪拌することができる。
【0098】
また、本実施形態では、上記のように、R2試薬を吸引しないときには、CPU2b(ドライバ基板2f)が、第2ステッピングモータ164aにパルス電流を印加していない状態から、第2ステッピングモータ164aにパルス速度1500ppsのパルス電流を印加している状態に切り替えて外側テーブル164を回転移動させた後、第2ステッピングモータ164aへのパルス電流の印加停止状態に切り替えるまでの駆動を、上述した矩形駆動方式により行うことによって、外側テーブル164の回転移動の速さを急激に変化させることができる。これにより、R2試薬容器110内のR2試薬に大きな慣性力を作用させることができ、その結果、R2試薬容器110内のR2試薬を効果的に移動(流動)させることができるので、R2試薬の攪拌をさらに効果的に行うことができる。
【0099】
また、本実施形態では、上記のように、R2試薬を吸引するときには、CPU2b(ドライバ基板2f)が、R2試薬撹拌時の外側テーブル164の加速度よりも小さい等加速度の加速期間(パルス速度を徐々に増加させる期間)と、R2試薬撹拌時の外側テーブル164の減速度よりも小さい等減速度の減速期間(パルス速度を徐々に減少させる期間)とを含む台形駆動方式により、第2ステッピングモータ164aを制御することによって、R2試薬撹拌時の加速度および減速度よりも速さの変化が緩やかになるように、外側テーブル164を移動させることができるので、R2試薬吸引位置P2へ移動する際の外側テーブル164の停止位置を正確に制御することができる。これにより、試薬吸引位置へ試薬容器を精度良く位置づけることができる。
【0100】
また、本実施形態では、上記のように、CPU2b(ドライバ基板2f)が、第2ステッピングモータ164aへのパルス電流の印加を停止している状態と、第2ステッピングモータ164aにパルス速度1500ppsのパルス電流を印加している状態との切り替えを周期的に繰り返すことによって、R2試薬容器110内のR2試薬を効果的に移動(流動)させるとともに、この切り替えを周期的に行うことによってR2試薬容器110内のR2試薬の流動状態を継続させることができるので、R2試薬が攪拌された状態を保つことができる。
【0101】
また、本実施形態では、上記のように、回転軸16aを中心とした外側テーブル164の矢印A1方向への水平回転移動を利用してR2試薬容器110の蓋部材130を移動させることにより、R2試薬容器110の開口部112aの閉塞動作を行う開口密封部183(ローラ183c)を設けることによって、外側テーブル164を矢印A1方向へ回転移動させるだけで、R2試薬容器110の開口部112aの閉塞を行うことができる。
【0102】
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0103】
たとえば、上記実施形態では、回転軸16aを中心として、外側テーブル164を、内側テーブル163の外側に配置した例を示したが、本発明はこれに限られない。たとえば、外側テーブルと内側テーブルとを、それぞれ別個の回転軸を中心に回転する独立した試薬容器保持部として構成してもよい。
【0104】
また、上記実施形態では、検体分析装置の一例として、R1試薬容器、R2試薬容器およびR3試薬容器の3種類の試薬容器を保持可能な試薬設置部を備えた分析装置を示したが、本発明はこれに限らず、1種類または2種類の試薬容器を保持する試薬設置部を備えた分析装置であってもよいし、4種類以上の試薬容器を保持する試薬設置部を備えた分析装置であってもよい。
【0105】
また、上記実施形態では、ステッピングモータにより外側テーブルを回転軸を中心として回転移動させるように構成した例を示したが、本発明はこれに限られない。たとえば、ステッピングモータ以外のサーボモータなどを用いて外側テーブルを回転移動させるように構成してもよい。
【0106】
また、上記実施形態では、R2試薬容器の撹拌動作時には、第2ステッピングモータ164aにパルス速度1500ppsのパルス電流を印加しているが、本発明はこれに限られない。たとえば、ステッピングモータに2000ppsや1000ppsなど、1500pps以外のパルス電流を印加してもよい。
【0107】
また、上記実施形態では、第2ステッピングモータ164aにパルス電流を印加していない状態と、1500ppsのパルス電流を印加している状態とを切り替えるように構成した例を示したが、本発明はこれに限られない。たとえば、第2ステッピングモータに150ppsのパルス電流を印加している状態と、1500ppsのパルス電流を印加している状態とを切り替えることによって、R2試薬の攪拌動作を行うように構成してもよい。このように構成すれば、外側テーブル164が停止することなく常に回転移動しながら、R2試薬容器110内の試薬に大きな慣性力を作用させることができる。これにより、外側テーブル164の回転移動を停止させることなく、R2試薬の攪拌を効果的に行うことができる。
【0108】
また、上記実施形態では、R2試薬の攪拌動作時に、第2ステッピングモータ164aを上述した矩形駆動方式で駆動することによって、外側テーブル164を急加速および急停止させる構成を示したが、本発明はこれに限られない。本発明では、外側テーブルの加速度および減速度が所定の大きさ以上であればよい。また、本発明では、攪拌動作時において、第2ステッピングモータの駆動を矩形駆動方式により行わなくてもよい。外側テーブルの加速度および減速度が所定の大きさ以上であれば、台形駆動方式により攪拌動作を行っても攪拌効果を得ることができる。
【0109】
また、上記実施形態では、攪拌動作時において、第2ステッピングモータ164aへのパルス電流の印加状態を約0.086秒継続するとともに、第2ステッピングモータ164aへのパルス電流の印加停止状態を約0.114秒継続することによって、約0.2秒を1単位の攪拌動作とするように構成した例を示したが、本発明はこれに限られない。本発明では、第2ステッピングモータ164aへのパルス電流の印加状態を約0.086秒間とは異なる期間継続してもよい。第2ステッピングモータ164aへのパルス電流の印加停止状態も、約0.114秒間とは異なる期間継続してもよい。また、1単位の攪拌動作を約0.2秒以外の時間間隔を単位として実施するように構成してもよい。これらの値は、試薬の粘性、量、試薬容器の大きさ、形状などの条件に応じて、適宜変更すればよい。ただし、第2ステッピングモータ164aへのパルス電流の印加状態および印加停止状態は、それぞれ、0.08秒以上0.15秒以下の期間で継続されるのが好ましい。
【0110】
また、上記実施形態では、外側テーブル164の回転移動状態と停止状態とからなる1単位の攪拌動作を、周期的に行うように構成した例を示したが、本発明はこれに限られない。本発明は、外側テーブルの攪拌動作を周期的に行わなくてもよい。外側テーブルの回転移動にR2試薬の攪拌が可能な速さの変化(加速および減速)があれば、その変化が変則的であってもよい。
【0111】
また、上記実施形態では、1単位の攪拌動作において、第2ステッピングモータ164aの130パルス分の回転移動によって外側テーブル164が約3.25度回転するように構成した例を示したが、本発明はこれに限られない。本発明では、1単位の攪拌動作において、外側テーブルが3.25度以外の約5度以下、または約10度以下の角度範囲で回転移動するように構成してもよい。この場合、第2ステッピングモータを130パルス分回転駆動させる必要はなく、130パルス以外のパルス数だけ駆動させてもよいし、第2ステッピングモータの1パルス分の回転駆動に対する外側テーブルの回転角度の比率を変更してもよい。
【0112】
また、上記実施形態では、R2試薬の吸引処理を行うときには、所定位置以外の場所で外側テーブルの回転移動を減速させることなく、所定位置までR2試薬容器を位置づけているが、本発明はこれに限られない。例えば、R2試薬の吸引処理を行うときにも、R2試薬の撹拌動作時と同じように、間欠的に外側テーブルを回転させてR2試薬容器を所定位置に位置づけてもよい。
【0113】
また、上記実施形態では、R2試薬の吸引動作などを除いて、外側テーブル164が常時攪拌動作を行うように構成した例を示したが、本発明はこれに限られない。たとえば、外側テーブルの攪拌動作は、一定時間毎に定期的に行うように構成してもよい。また、たとえばR2試薬の吸引を行う際に、試薬吸引処理を行う前の時点で攪拌動作を行うようにしてもよい。
【0114】
また、上記実施形態では、外側テーブル164の回転移動を利用して、開口密封部183の2つのローラ183cによってR2試薬容器110の蓋部材130の密閉を行うように構成した例を示したが、本発明はこれに限られない。本発明では、外側テーブルの回転移動を利用して試薬容器の蓋部材を開放するように構成してもよい。たとえば、外側テーブルの矢印A1方向の回転移動を利用して試薬容器の蓋部材を密閉するとともに、矢印A2方向の移動を利用して試薬容器の蓋部材を開放するように構成してもよい。
【0115】
また、上記実施形態では、密封解除部181により開口部112aの密封状態を解除し、蓋部材移動部182により開口部112aを全開しているが、本発明はこれに限られない。たとえば、1つの機構により開口部112aの密封解除動作と全開動作とを実行してもよい。
【0116】
また、上記実施形態では、外側テーブルを回転移動させる駆動部を制御する駆動制御部の一例として、測定機構部のCPUおよびドライバ基板を示したが、本発明はこれに限らず、外側テーブルを回転移動させる駆動部を制御装置のCPUとドライバ基板とにより制御するようにしてもよい。また、この際、測定機構部の各部および検体搬送部の制御を制御装置のCPUで行ってもよい。
【符号の説明】
【0117】
1 分析装置
2a 制御部
2b CPU
2f ドライバ基板
7 R2試薬分注アーム
7a ピペット
14 検出部
16 試薬設置部
16a 回転軸
18 R2試薬開閉機構部
100 R1試薬容器
110 R2試薬容器
120 R3試薬容器
112a 開口部
130 蓋部材
163 内側テーブル
163a 第1ステッピングモータ
164 外側テーブル
164a 第2ステッピングモータ
183 開口密封部
183c ローラ
【特許請求の範囲】
【請求項1】
回転軸を中心に水平回転可能に構成され、試薬を収容した試薬容器を保持するための試薬容器保持部と、
前記試薬容器保持部に保持された前記試薬容器から試薬を吸引する試薬吸引部と、
前記試薬吸引部に吸引された試薬と検体とから調製された測定試料を分析する分析部と、
前記試薬容器保持部を前記回転軸を中心として回転移動させる駆動部と、
前記試薬容器から試薬を吸引するときには、前記試薬容器を前記試薬吸引部による試薬吸引位置に位置づけるために前記試薬容器保持部を一方方向に回転移動させ、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら前記試薬容器保持部を前記一方方向へ回転移動させるように、前記駆動部を制御する駆動制御部と、を備えた検体分析装置。
【請求項2】
前記駆動制御部は、試薬を吸引しないときには、前記試薬容器保持部を前記一方方向に間欠回転移動させるよう、前記駆動部を制御するように構成されている、請求項1に記載の検体分析装置。
【請求項3】
前記駆動制御部は、前記試薬容器から試薬を吸引するときには、第1加速度での加速により前記試薬容器保持部が前記一方方向への回転移動を開始し、第1減速度での減速により前記試薬容器保持部が前記一方方向への回転移動を停止するよう、前記駆動部を制御し、試薬を吸引しないときには、前記第1加速度よりも大きい第2加速度での加速と、前記第1減速度よりも大きい第2減速度での減速とを交互に繰り返しながら前記試薬容器保持部が前記一方方向に回転移動するよう、前記駆動部を制御する、請求項1または2に記載の検体分析装置。
【請求項4】
前記駆動制御部は、試薬を吸引しないときには、前記加速と前記減速との切り替えを周期的に繰り返すように、前記駆動部を制御するように構成されている、請求項1〜3のいずれか1項に記載の検体分析装置。
【請求項5】
前記駆動制御部は、試薬を吸引しないときには、前記減速により前記試薬容器保持部の回転移動が停止するように、前記駆動部を制御するように構成されている、請求項1〜4のいずれか1項に記載の検体分析装置。
【請求項6】
前記駆動制御部は、試薬を吸引しないときには、前記駆動部に駆動パルスを印加していない状態から前記駆動部に所定パルス数の駆動パルスを印加することにより、前記試薬容器保持部を加速させ、前記駆動部に前記所定パルス数の駆動パルスを印加している状態から前記駆動部への駆動パルスの印加を停止することにより、前記試薬容器保持部を減速させる、請求項1〜5のいずれか1項に記載の検体分析装置。
【請求項7】
前記駆動制御部は、前記試薬容器から試薬を吸引するときには、前記駆動部に印加する駆動パルス数を徐々に増加させることにより、前記試薬容器保持部の回転移動を加速させ、前記駆動部に印加する駆動パルス数を徐々に減少させることにより、前記試薬容器保持部の回転移動を減速させる、請求項1〜6のいずれか1項に記載の検体分析装置。
【請求項8】
前記試薬容器は、試薬を吸引するための上端開口と前記上端開口を閉塞するための蓋とを含み、
前記回転軸を中心とした前記試薬容器保持部の一方方向への水平回転移動を利用して前記試薬容器の蓋を移動させることにより、前記試薬容器の上端開口の閉塞動作および開放動作の少なくとも一方を行う蓋移動部をさらに備える、請求項1〜7のいずれか1項に記載の検体分析装置。
【請求項9】
前記試薬容器は、磁性粒子を含む試薬を収容する、請求項1〜8のいずれか1項に記載の検体分析装置。
【請求項10】
前記試薬容器保持部は、
前記回転軸を中心に回転可能に構成され、磁性粒子を含む第1試薬を収容した第1試薬容器を保持するための第1容器保持領域と、
前記回転軸を中心に回転可能に構成され、磁性粒子を含まない第2試薬を収容した第2試薬容器を保持するための第2容器保持領域とを含み、
前記第1容器保持領域は、前記第1容器保持領域に対する前記回転軸からの距離が前記第2容器保持領域に対する前記回転軸からの距離よりも大きい位置に設けられている、請求項1〜9のいずれか1項に記載の検体分析装置。
【請求項11】
前記駆動部は、
前記第1容器保持領域を回転させるための第1駆動部と、
前記第2容器保持領域を回転させるための第2駆動部とを含み、
前記駆動制御部は、試薬を吸引しないときには、前記第1容器保持領域および前記第2容器保持領域のうち、前記第1容器保持領域のみが加速と減速とを交互に繰り返しながら前記一方方向へ回転移動するように、前記第1駆動部および前記第2駆動部を制御するように構成されている、請求項10に記載の検体分析装置。
【請求項12】
前記試薬容器保持部は、複数の前記試薬容器を円環状に保持するように構成されている、請求項1〜11のいずれか1項に記載の検体分析装置。
【請求項13】
回転軸を中心に水平回転可能に構成され、試薬を収容した試薬容器を保持するための試薬容器保持部に、前記試薬容器を保持させるステップと、
前記試薬容器から試薬を吸引するときには、前記試薬容器が前記試薬吸引部による試薬吸引位置に位置づけるために前記試薬容器保持部を一方方向に回転移動させるステップと、
試薬を吸引しないときには、加速と減速とを交互に繰り返しながら前記試薬容器保持部を前記一方方向へ回転移動させるステップと、
前記試薬容器保持部に保持された前記試薬容器内の試薬と検体とから調製された測定試料を分析するステップとを備えた、検体分析方法。
【請求項1】
回転軸を中心に水平回転可能に構成され、試薬を収容した試薬容器を保持するための試薬容器保持部と、
前記試薬容器保持部に保持された前記試薬容器から試薬を吸引する試薬吸引部と、
前記試薬吸引部に吸引された試薬と検体とから調製された測定試料を分析する分析部と、
前記試薬容器保持部を前記回転軸を中心として回転移動させる駆動部と、
前記試薬容器から試薬を吸引するときには、前記試薬容器を前記試薬吸引部による試薬吸引位置に位置づけるために前記試薬容器保持部を一方方向に回転移動させ、試薬を吸引しないときには、加速と減速とを交互に繰り返しながら前記試薬容器保持部を前記一方方向へ回転移動させるように、前記駆動部を制御する駆動制御部と、を備えた検体分析装置。
【請求項2】
前記駆動制御部は、試薬を吸引しないときには、前記試薬容器保持部を前記一方方向に間欠回転移動させるよう、前記駆動部を制御するように構成されている、請求項1に記載の検体分析装置。
【請求項3】
前記駆動制御部は、前記試薬容器から試薬を吸引するときには、第1加速度での加速により前記試薬容器保持部が前記一方方向への回転移動を開始し、第1減速度での減速により前記試薬容器保持部が前記一方方向への回転移動を停止するよう、前記駆動部を制御し、試薬を吸引しないときには、前記第1加速度よりも大きい第2加速度での加速と、前記第1減速度よりも大きい第2減速度での減速とを交互に繰り返しながら前記試薬容器保持部が前記一方方向に回転移動するよう、前記駆動部を制御する、請求項1または2に記載の検体分析装置。
【請求項4】
前記駆動制御部は、試薬を吸引しないときには、前記加速と前記減速との切り替えを周期的に繰り返すように、前記駆動部を制御するように構成されている、請求項1〜3のいずれか1項に記載の検体分析装置。
【請求項5】
前記駆動制御部は、試薬を吸引しないときには、前記減速により前記試薬容器保持部の回転移動が停止するように、前記駆動部を制御するように構成されている、請求項1〜4のいずれか1項に記載の検体分析装置。
【請求項6】
前記駆動制御部は、試薬を吸引しないときには、前記駆動部に駆動パルスを印加していない状態から前記駆動部に所定パルス数の駆動パルスを印加することにより、前記試薬容器保持部を加速させ、前記駆動部に前記所定パルス数の駆動パルスを印加している状態から前記駆動部への駆動パルスの印加を停止することにより、前記試薬容器保持部を減速させる、請求項1〜5のいずれか1項に記載の検体分析装置。
【請求項7】
前記駆動制御部は、前記試薬容器から試薬を吸引するときには、前記駆動部に印加する駆動パルス数を徐々に増加させることにより、前記試薬容器保持部の回転移動を加速させ、前記駆動部に印加する駆動パルス数を徐々に減少させることにより、前記試薬容器保持部の回転移動を減速させる、請求項1〜6のいずれか1項に記載の検体分析装置。
【請求項8】
前記試薬容器は、試薬を吸引するための上端開口と前記上端開口を閉塞するための蓋とを含み、
前記回転軸を中心とした前記試薬容器保持部の一方方向への水平回転移動を利用して前記試薬容器の蓋を移動させることにより、前記試薬容器の上端開口の閉塞動作および開放動作の少なくとも一方を行う蓋移動部をさらに備える、請求項1〜7のいずれか1項に記載の検体分析装置。
【請求項9】
前記試薬容器は、磁性粒子を含む試薬を収容する、請求項1〜8のいずれか1項に記載の検体分析装置。
【請求項10】
前記試薬容器保持部は、
前記回転軸を中心に回転可能に構成され、磁性粒子を含む第1試薬を収容した第1試薬容器を保持するための第1容器保持領域と、
前記回転軸を中心に回転可能に構成され、磁性粒子を含まない第2試薬を収容した第2試薬容器を保持するための第2容器保持領域とを含み、
前記第1容器保持領域は、前記第1容器保持領域に対する前記回転軸からの距離が前記第2容器保持領域に対する前記回転軸からの距離よりも大きい位置に設けられている、請求項1〜9のいずれか1項に記載の検体分析装置。
【請求項11】
前記駆動部は、
前記第1容器保持領域を回転させるための第1駆動部と、
前記第2容器保持領域を回転させるための第2駆動部とを含み、
前記駆動制御部は、試薬を吸引しないときには、前記第1容器保持領域および前記第2容器保持領域のうち、前記第1容器保持領域のみが加速と減速とを交互に繰り返しながら前記一方方向へ回転移動するように、前記第1駆動部および前記第2駆動部を制御するように構成されている、請求項10に記載の検体分析装置。
【請求項12】
前記試薬容器保持部は、複数の前記試薬容器を円環状に保持するように構成されている、請求項1〜11のいずれか1項に記載の検体分析装置。
【請求項13】
回転軸を中心に水平回転可能に構成され、試薬を収容した試薬容器を保持するための試薬容器保持部に、前記試薬容器を保持させるステップと、
前記試薬容器から試薬を吸引するときには、前記試薬容器が前記試薬吸引部による試薬吸引位置に位置づけるために前記試薬容器保持部を一方方向に回転移動させるステップと、
試薬を吸引しないときには、加速と減速とを交互に繰り返しながら前記試薬容器保持部を前記一方方向へ回転移動させるステップと、
前記試薬容器保持部に保持された前記試薬容器内の試薬と検体とから調製された測定試料を分析するステップとを備えた、検体分析方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2011−75422(P2011−75422A)
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願番号】特願2009−227599(P2009−227599)
【出願日】平成21年9月30日(2009.9.30)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願日】平成21年9月30日(2009.9.30)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
[ Back to top ]