
検体分析装置
【課題】使用者による位置確認動作の開始の指示によることなく分注部のピペットの位置確認を行うことができ、ピペットの破損や測定結果の信頼性低下を防止することができる検体分析装置を提供する。
【解決手段】本発明の検体分析装置1は、ピペットPと、ピペットPを移動させるピペット移動機構160と、所定位置に配置された位置確認用部材210と、ピペット移動機構160により前記ピペットを位置確認用部材210に移動させ、ピペットPが所定位置に配置されたことを確認する位置確認処理を実行する位置確認実行手段と、を備える。
【解決手段】本発明の検体分析装置1は、ピペットPと、ピペットPを移動させるピペット移動機構160と、所定位置に配置された位置確認用部材210と、ピペット移動機構160により前記ピペットを位置確認用部材210に移動させ、ピペットPが所定位置に配置されたことを確認する位置確認処理を実行する位置確認実行手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、免疫分析装置や血液凝固分析装置等の検体を分析する検体分析装置に関する。
【背景技術】
【0002】
検体と試薬とを混和して調製された試料を測定することによって、検体の成分を分析する検体分析装置が従来から知られている。この検体分析装置は、試薬が収容された試薬容器から試薬を吸引するとともに、吸引した試薬をキュベット(反応容器)内に吐出するように構成された試薬分注部を備えている。この試薬分注部は、所定の動作シーケンスに従って、検体分析装置に設けられた制御部によって動作制御される。
【0003】
試薬容器には、試薬の吸引のために試薬分注部のピペットが挿入される開口部が設けられている。この開口部は、試薬の蒸発やコンタミネーション等を防ぐため、可及的に小さく形成されている。そのため、ピペットが開口部に正確に位置づけられていなければ、試薬を適切に吸引することができない。
したがって、試薬の分注を適切に行うには、ピペットが所定の位置に正確に位置づけられるように調整することが必要である。
【0004】
分注部のピペットが所定の位置に位置づけられるように調整を行うことは、下記特許文献1に開示されている。この特許文献1によれば、分注部のピペットの調整は、分析装置の設置時や分注部に関連する部品の交換時に使用者が所定の調整プログラムを実行することによって行われている。
【0005】
【特許文献1】特開2001−91522号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
検体分析装置を長期間使用していると、試薬分注部を駆動する機構の劣化等(駆動ベルトの伸び等)によりピペットの停止位置が徐々にずれてくる場合がある。また、分注部のピペットにユーザが触れてしまうことによって、ピペットが曲がってしまうこともある。このような場合に分析装置によって分析動作を行うと、ピペットの先端部を所定の位置に正確に位置づけることが困難となり、ピペットが試薬容器等に接触して破損するおそれがある。
【0007】
また、特許文献1の技術では、ピペットが所定位置に位置づけられるように調整を行うことはできるが、上記のような検体分析装置を長期間使用することによって生じるピペットの破損を防止することはできない。
【0008】
本発明は、ピペットの移動動作の異常およびピペットの変形などによる当該ピペットの破損を未然に防止することができる検体分析装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の検体分析装置は1つの観点から、検体と試薬とを混和して検体を分析する検体分析装置であって、試薬又は検体を分注するためのピペットと、前記ピペットを移動させるピペット移動機構と、所定位置に配置された位置確認部と、前記ピペット移動機構により前記ピペットを前記位置確認部に移動させ、前記ピペットが前記所定位置に配置されたことを確認する位置確認処理を実行する位置確認実行手段と、を備えていることを特徴とする。
【0010】
この構成によれば、ピペットの位置確認処理を実行することにより、ピペットの移動動作およびピペットの形状などが正常であることを確認することができるので、ピペットの移動動作の異常およびピペットの変形などによる当該ピペットの破損を未然に防止することができる。
【0011】
上記観点による検体分析装置の前記位置確認処理は、前記ピペットの先端部が前記所定位置に配置されるように前記ピペットを移動させ、移動させた前記ピペットの先端部が前記所定位置に配置されたか否かを判定することによって前記ピペットが前記所定位置に配置されたことを確認する処理であってもよい。
このように構成することにより、ピペットの先端部が前記所定位置に配置されたか否かを判定すればピペットが所定位置に配置されたことを確認することができるので、ピペットの位置確認に必要となる装置構成を簡略化することができる。
【0012】
上記観点による検体分析装置の前記位置確認実行手段は、自動的に、前記位置確認処理を実行するように構成されていてもよい。
このように構成することにより、自動的に、前記位置確認処理を実行するので、分析装置の使用者が特別な操作をしなくても、ピペットの位置確認が実行され、ピペットの破損をより確実に防止することができる。
【0013】
上記観点による検体分析装置は、前記検体分析装置による分析開始の指示を受け付ける分析開始指示受付手段をさらに備え、前記位置確認実行手段が、前記分析開始指示受付手段によって前記分析開始の指示が受け付けられたときに、前記位置確認処理を実行するよう構成されていてもよい。
このように構成することにより、分析装置の使用者が特別な操作をしなくても、分析開始の指示毎にピペットの位置確認が実行されるので、ピペットの破損をより確実に防止することができる。
【0014】
上記観点による検体分析装置は、分析開始指示受付手段が、複数の検体についての1つの分析開始の指示を受け付け、前記位置確認実行手段が、前記分析開始指示受付手段によって前記複数の検体についての1つの分析開始の指示が受け付けられた後、前記検体に対して最初の処理が行われる前に、前記位置確認処理を実行するように構成されていてもよい。
このように構成することにより、1検体毎にピペットの位置確認を実行する場合に比べて、検体の処理時間を短縮することができる。また、検体に対して最初の処理が行われる前にピペットの位置確認が実行されるので、ピペットの位置が確認できないまま検体の処理を開始することを防止することができる。これにより、検体の処理中に装置の動作エラーが発生し、処理中の検体および試薬を無駄にしてしまうことを防止することができる。
【0015】
上記観点による検体分析装置の前記位置確認実行手段が、前記検体分析装置が分析開始可能な状態で待機しているときに、所定の時間毎に前記位前記確認処理を実行するように構成されていてもよい。
このように構成することにより、分析装置の使用者が特別な操作をしなくても、所定の時間毎にピペットの位置確認が実行されるので、ピペットの破損をより確実に防止することができる。
【0016】
上記観点による検体分析装置の前記位置確認部は、前記ピペットの先端部が挿入可能な空間を有する位置確認用部材を備え、前記分析装置は、前記ピペットが前記位置確認用部材に衝突したか否かを検知するためのセンサをさらに備え、前記位置確認実行手段は、前記センサの出力に基づいて、前記ピペットが前記所定位置に配置されたか否かを確認してもよい。
このように構成することにより、簡単な装置構成でピペットの位置確認を実行することができる。また、ピペットが所定位置に配置された場合にはピペットはどこにも接触しないので、ピペットの位置確認によってピペットが破損してしまうことを防止することができる。
【0017】
上記観点による検体分析装置は、前記位置確認実行手段が、前記ピペットが前記所定位置に配置されたことを確認できなかった場合に、前記ピペットの形状または移動に不具合がある旨を通知する通知手段をさらに備えていてもよい。
このように構成することにより、分析装置の使用者は、ピペットの形状または移動に不具合があることを容易に知ることができる。
【0018】
上記観点による検体分析装置は、前記位置確認実行手段が、前記ピペットが前記所定位置に配置されたことを確認できなかった場合に、前記ピペットの動作を停止させるピペット動作停止手段をさらに備えてもよい。
このように構成することにより、分析装置の使用者は、ピペットが停止した状態で装置の状態を確認することが可能となるので、装置状態確認中にピペットが動作することによってピペットが使用者の手や腕などと接触し、使用者が怪我をしたり、ピペットが破損したりすることを防止することができる。
【発明の効果】
【0019】
本発明によれば、ピペットの移動動作の異常およびピペットの変形などによる当該ピペットの破損を未然に防止することができる。
【発明を実施するための最良の形態】
【0020】
以下、添付図面を参照しつつ、本発明の検体分析装置の実施の形態を詳細に説明する。
[装置の全体構成]
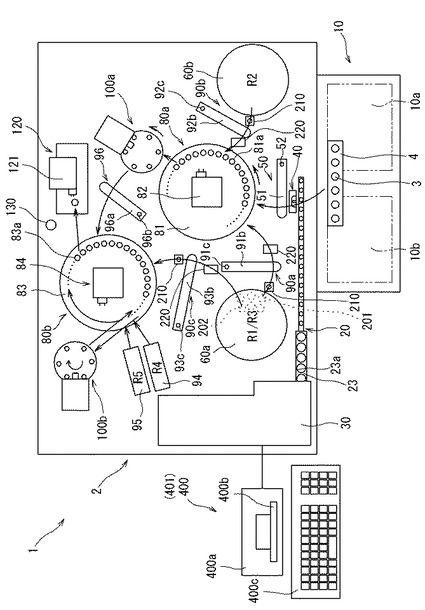
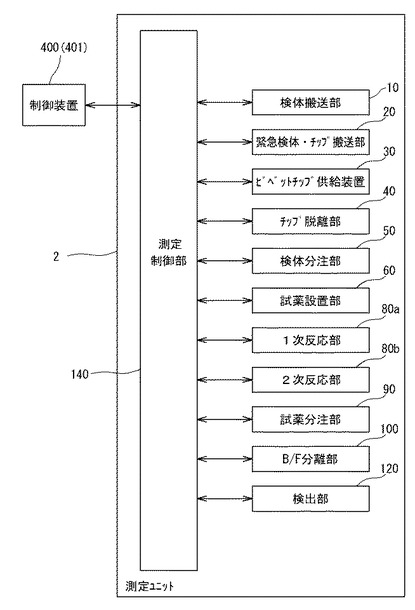
図1は、本発明の一実施の形態に係る免疫分析装置(検体分析装置)の全体構成を示す平面説明図、図2は、図1に示される免疫分析装置における測定ユニットの構成を示すブロック図である。
本発明の一実施の形態に係る免疫分析装置1は、血液等の検体(試料)を用いてB型肝炎、C型肝炎、腫瘍マーカ及び甲状腺ホルモン等種々の測定項目の検査を行うための装置である。この免疫分析装置1は、図1に模式的に示されるように、複数の機構(コンポーネント)からなる測定ユニット(測定部)2と、この測定ユニット2に電気的に接続された、データ処理ユニットである制御装置400とから主に構成されている。
【0021】
測定ユニット2は、検体搬送部(サンプラ)10と、緊急検体・チップ搬送部20と、ピペットチップ供給装置30と、チップ脱離部40と、検体分注部50と、試薬設置部60(60a及び60b)と、1次反応部80a及び2次反応部80bと、試薬分注部90(90a〜90e)と、B/F分離部100(100a,100b)と、検出部120と、前記検体搬送部(サンプラ)10や検体分注部50等の機構の動作制御を行う測定制御部140(図2参照)等を備えている。なお、本実施の形態に係る免疫分析装置1では、検体分注部50により吸引及び吐出された血液等の検体が他の検体と混ざり合うのを抑制するために、検体の吸引及び吐出を行う度に、使い捨てのピペットチップの交換を行っている。
【0022】
この免疫分析装置1では、測定対象(分析対象)である血液等の検体に含まれる抗原に結合した捕捉抗体(R1試薬)に磁性粒子(R2試薬)を結合させた後に、結合(Bound)した抗原、捕捉抗体及び磁性粒子を1次B/F(Bound Free)分離部100aの磁石に引き寄せることにより、未反応(Free)の捕捉抗体を含むR1試薬を除去する。そして、磁性粒子が結合した抗原と標識抗体(R3試薬)とを結合させた後に、結合(Bound)した磁性粒子、抗原及び標識抗体を2次B/F分離部100bの磁石に引き寄せることにより、未反応(Free)の標識抗体を含むR3試薬を除去する。さらに、分散液(R4試薬)や標識抗体との反応過程で発光する発光基質(R5試薬)を添加した後、標識抗体と発光基質との反応によって生じる発光量を測定する。このような過程を経て、標識抗体に結合する検体に含まれる抗原を定量的に測定している。
【0023】
[測定ユニットの構成]
測定ユニット2の各機構の構成としては、公知の構成を適宜採用することができるが、以下、図1〜図3を参照して、それらについて簡単に説明をする。
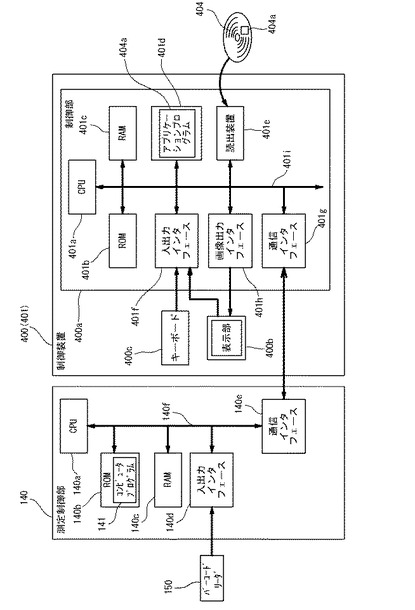
図3に示すように、測定制御部140は、CPU140aと、ROM140b及びRAM140c等からなる記憶部と、入出力インタフェース140dと、通信インタフェース140eとから主として構成されている。CPU140a、ROM140b、RAM140c、入出力インタフェース140d、通信インタフェース140eは、バス140fによって接続されている。
【0024】
CPU140aは、ROM140bに記憶されているコンピュータプログラム141及びRAM140cにロードされたコンピュータプログラムを実行することが可能である。 ROM140bは、マスクROM、PROM、EPROM、EEPROM等によって構成されており、CPU140aに実行されるコンピュータプログラム及びこれに用いるデータ等が記録されている。
【0025】
RAM140cは、SRAM又はDRAM等によって構成されている。RAM140cは、ROM140bに記録されているコンピュータプログラムの読み出しに用いられる。また、これらのコンピュータプログラムを実行するときに、CPU140aの作業領域として利用される。
【0026】
入出力インタフェース140dは、例えば、USB、IEEE1394、RS−232C等のシリアルインタフェース、SCSI、IDE、IEEE1284等のパラレルインタフェース、及びD/A変換器、A/D変換器等からなるアナログインタフェース等から構成されている。入出力インタフェース140dにはバーコードリーダ150が接続されている。検体を収容する試験管3(図1参照)や、複数本の試験管3が載置されるラック4(図1参照)には、当該試験管3内の検体やラック4を特定するための情報を記録したバーコードが付されている。バーコードリーダ150は、この試験管3やラック4に付されたバーコードを読み取るために使用される。
【0027】
通信インタフェース140eは、例えば、Ethernet(登録商標)インタフェースである。測定制御部140は、通信インタフェース140eにより、所定の通信プロトコルを使用してコンピュータ401との間でデータの送受信が可能である。
【0028】
図1及び図2に示すように、検体搬送部10は、検体を収容した複数の試験管3が載置されたラック4を検体分注部50の吸引位置に対応する位置まで搬送するように構成されている。この検体搬送部10は、未処理の検体を収容した試験管3が載置されたラック4をセットするためのラックセット部10aと、分注処理済みの検体を収容した試験管3が載置されたラック4を貯留するためのラック貯留部10bとを有している。そして、未処理の検体を収容した試験管3を検体分注部50の吸引位置に対応する位置まで搬送することにより、検体分注部50により試験管3内の血液等の検体の吸引が行われ、その試験管3を載置したラック4がラック貯留部10bに貯留される。
【0029】
緊急検体・チップ搬送部20は、検体搬送部10により搬送される検体に割り込んで検査する必要がある緊急検体を収容した試験管3を検体分注部50の装着位置まで搬送するように構成されている。
ピペットチップ供給装置30は、投入したピペットチップを1つずつ緊急検体・チップ搬送部20の搬送ラック23のチップ設置部23aに載置する機能を有している。
チップ脱離部40は、後述する検体分注部50に装着されたピペットチップを脱離するために設けられている。
【0030】
検体分注部50は、検体搬送部10により吸引位置に搬送された試験管3内の検体を、後述する1次反応部80aの1次反応テーブル81の保持部81aに保持されるキュベット(図示せず)内に分注する機能を有している。この検体分注部50は、アーム部51を、軸52を中心に回動させるとともに、上下方向に移動させることが可能なように構成されている。また、アーム部51の先端部には、検体の吸引及び吐出を行うノズル部が設けられており、このノズル部の先端には、緊急検体・チップ搬送部20の搬送ラック(図示せず)により搬送されるピペットチップが装着される。
【0031】
試薬設置部60aは、回転駆動される回転テーブルであり、捕捉抗体を含むR1試薬が収容される試薬容器201及び標識抗体を含むR3試薬が収容される試薬容器202が設置される。
一方、試薬設置部60bは、回転駆動される回転テーブルであり、磁性粒子を含むR2試薬が収容される試薬容器が設置される。
【0032】
1次反応部80aは、回転駆動される1次反応テーブル81の保持部81aに保持されるキュベットを所定の期間(本実施の形態では、20秒)毎に所定の角度だけ回転移送するとともに、キュベット内の検体、R1試薬及びR2試薬を攪拌するために設けられている。つまり、1次反応部80aは、キュベット内で磁性粒子を有するR2試薬と検体中の抗原とを反応させるために設けられている。この1次反応部80aは、検体とR1試薬及びR2試薬とが収容されるキュベットを回転方向に搬送するための1次反応テーブル81と、キュベット8内の検体、R1試薬及びR2試薬を攪拌するとともに、攪拌された検体、R1試薬及びR2試薬が収容されたキュベットを後述する1次B/F分離部100aに搬送する容器搬送部82とから構成されている。
【0033】
容器搬送部82は、1次反応テーブル81の中心部分に回転可能に設置されている。この容器搬送部82は、1次反応テーブル81の保持部81aに保持されるキュベットを把持するとともにキュベット内の試料を攪拌する機能を有している。さらに、容器搬送部82は、検体、R1試薬及びR2試薬を攪拌してインキュベーションした試料を収容したキュベットを1次B/F分離部100aに搬送する機能も有している。
【0034】
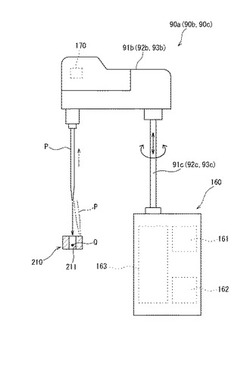
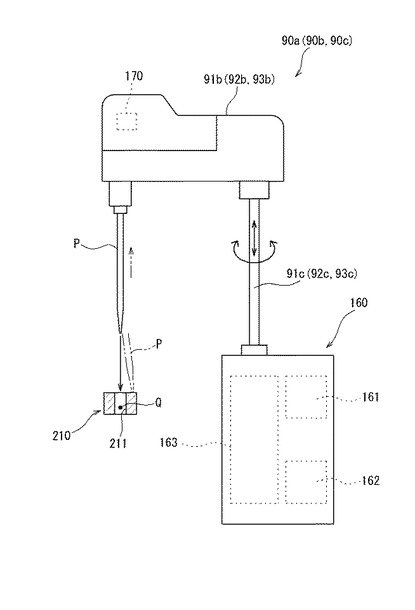
試薬分注部90aは、試薬設置部60aに設置される試薬容器内のR1試薬を吸引するとともに、その吸引したR1試薬を1次反応部80aのキュベット内に分注するための機能を有している。この試薬分注部90aは、アーム部91bを、軸91cを中心に回動させるとともに上下方向に移動させることが可能な駆動部160(図5参照)を備えている。アーム部91bの先端部には、試薬容器201内のR1試薬の吸引及び吐出を行うためのピペットP(図5参照)が取り付けられている。また、試薬分注部90aは、ピペットPが障害物に衝突したことを検出するために用いられる衝突検出用センサ170(図6参照)を備えている。なお、駆動部160は、後述するようにピペットPの先端を所定位置(位置確認用部材210(図5参照)の位置)に移動させるピペット移動機構を構成する。
【0035】
図5は、試薬分注部の構成を概略的に示す側面図である。この図に示すように、駆動部160は、回転用モータ161と、昇降用モータ162と、回転用モータ161及び昇降用モータの動力を軸91cに伝達する伝達機構163とを備えている。伝達機構163は、例えば回転用モータ161の回転動力を減速して軸91cに伝達するベルト伝動機構やギヤ機構等、昇降用モータ162の回転動力を上下方向の直線動力に変換して軸91cに伝達するベルト伝動機構やラック・ピニオン機構等からなる。回転用モータ161や昇降用モータ162の回転パルスはエンコーダ(図示略)によって検出される。
【0036】
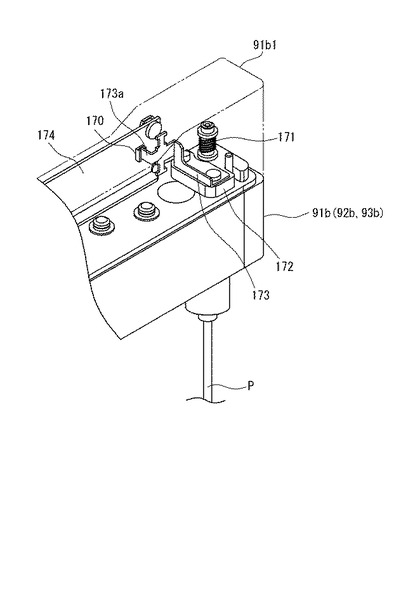
図6は、アーム部91b及び衝突検出用センサ170を示す斜視図である。この図には、上部カバー91b1(2点鎖線で示す)が取り外されることによって内部が露出したアーム部91bが示されている。ピペットPは、アーム部91bに上下方向に移動(摺動)可能に支持されるとともに、下方への移動が所定に規制されている。また、ピペットPは、圧縮コイルバネからなる付勢部材171によって下方へ付勢されている。アーム部91bには、ピペットPとともに上下方向に移動可能な台座172が設けられ、この台座172上に検知部材173が取り付けられている。アーム部91bには回路基板174が立設され、この回路基板174に衝突検出用センサ170が取り付けられている。
【0037】
本実施の形態の衝突検出用センサ170は、投光部と受光部とを有する透過型センサからなる。検知部材173には、衝突検出用センサ170の投受光部の間に配置される遮光板173aが設けられている。遮光板173aは、正常時に衝突検出用センサ170を遮光し、衝突検出用センサ170をオフ状態とする。ピペットPが下降して障害物に衝突すると、アーム部91に対してピペットPが上昇し、台座172を介して遮光板173aも上昇するため、衝突検出用センサ170の遮光が解除される。これによって衝突検出用センサ170がオンとなった場合に、測定制御部140により、ピペットPが障害物に衝突したことが検出される。
【0038】
図1に示すように、試薬分注部90bは、試薬設置部60bに設置される試薬容器内のR2試薬を1次反応部80aの検体及びR1試薬が分注されたキュベット内に分注するための機能を有している。この試薬分注部90bは、アーム部92bを、軸92cを中心に回動させるとともに上下方向に移動させることが可能なように構成されている。また、アーム部92bの先端部には、試薬容器内のR2試薬の吸引及び吐出を行うためのピペットPが取り付けられている。試薬分注部90bは、試薬分注部90aと同様に、図5及び図6に示すような駆動部160及び衝突検出用センサ170を備えている。
【0039】
本実施の形態では、1次B/F分離部100aは、1次反応部80aの容器搬送部82によって搬送されたキュベット内の試料から未反応のR1試薬(不要成分)と磁性粒子とを分離するために設けられている。
未反応のR1試薬等が分離された1次B/F分離部100aのキュベットは、搬送機構96により2次反応部80bの2次反応テーブル83の保持部83aに搬送される。搬送機構96は、先端にキュベット把持部(図示せず)を有するアーム部96aを、軸96bを中心に回動させるとともに、上下方向に移動させることが可能なように構成されている。
【0040】
2次反応部80bは、1次反応部80aと同様の構成を有しており、2次反応テーブル83の保持部83aに保持されるキュベットを所定の期間(本実施の形態では、20秒)毎に所定の角度だけ回転移送するとともに、キュベット内の検体、R1試薬、R2試薬、R3試薬、R4試薬、及びR5試薬を攪拌するために設けられている。つまり、2次反応部80bは、キュベット内で標識抗体を有するR3試薬と検体中の抗原とを反応させるとともに、発光基質を有するR5試薬とR3試薬の標識抗体とを反応させるために設けられている。この2次反応部80bは、検体、R1試薬、R2試薬、R3試薬、R4試薬及びR5試薬が収容されるキュベット8を回転方向に搬送するための2次反応テーブル83と、キュベット内の検体、R1試薬、R2試薬、R3試薬、R4試薬及びR5試薬を攪拌するとともに、攪拌された検体等が収容されたキュベットを後述する2次B/F分離部100bに搬送する容器搬送部84とから構成されている。さらに、容器搬送部84は、2次B/F分離部100bにより処理されたキュベットを再び2次反応テーブル83の保持部83aに搬送する機能を有している。
【0041】
試薬分注部90cは、試薬設置部60aに設置される試薬容器202内のR3試薬を吸引するとともに、その吸引されたR3試薬を2次反応部80bの検体、R1試薬及びR2試薬が分注されたキュベット内に分注するための機能を有している。この試薬分注部90cは、アーム部93bを、軸93cを中心に回動させるとともに、上下方向に移動させることが可能なように構成されている。また、アーム部93bの先端部には、試薬容器内のR3試薬の吸引及び吐出を行うためのピペットPが取り付けられている。試薬分注部90cは、試薬分注部90aと同様に、図5及び図6に示すような駆動部160及び衝突検出用センサ170を備えている。
【0042】
2次B/F分離部100bは、1次B/F分離部100aと同様の構成を有しており、2次反応部80bの容器搬送部84によって搬送されたキュベット内の試料から未反応のR3試薬(不要成分)と磁性粒子とを分離するために設けられている。
R4試薬分注部90d及びR5試薬分注部90eは、図示しないノズル部を上下移動させ、それぞれR4試薬及びR5試薬を2次反応部80bの2次反応テーブル83に保持されたキュベット内に供給するために設けられている。
【0043】
検出部120は、所定の処理が行なわれた検体の抗原に結合する標識抗体と発光基質との反応過程で生じる発光量を光電子増倍管(Photo Multiplier Tube)で取得することにより、その検体に含まれる抗原の量を測定するために設けられている。この検出部120は、2次反応部80bの2次反応テーブル83の保持部83aに保持されるキュベットを当該検出部120に搬送するための搬送機構部121を備えている。
【0044】
本実施の形態の測定ユニット2は、以上に説明した構成のほか、図1に示すように試薬分注部90a〜90cのピペットPを洗浄するピペット洗浄部220と、ピペットPの先端の位置を確認するための位置確認用部材210とを備えている。以下、試薬分注部90a用のピペット洗浄部220及び位置確認用部材210を例に説明するが、試薬分注部90b、90c用のピペット洗浄部220及び位置確認用部材210の構成も同様であるため、これらの説明は省略する。
【0045】
(ピペット洗浄部の構成)
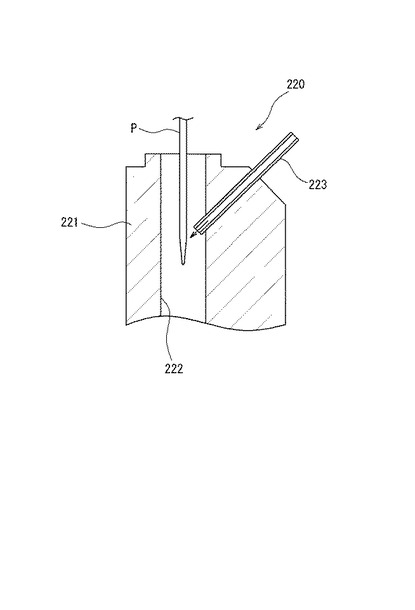
図7に示すように、ピペット洗浄部220は洗浄容器221を備え、この洗浄容器221には、ピペットPを挿入するための洗浄孔222と、この洗浄孔222内に洗浄液を吐出するための洗浄ノズル223とが設けられている。洗浄孔222は洗浄容器221の上端で開口し、この開口からピペットPを挿入させることが可能である。洗浄ノズル223は、洗浄孔222に対して斜め上方から洗浄液を吐出し、洗浄孔222に挿入されたピペットPに洗浄液を吹き付けることによって、ピペットPを洗浄するように構成されている。
【0046】
図1に示すように、ピペット洗浄部220は、平面視において、試薬分注部90aのピペットPの移動軌跡(軸91cを中心とする回動軌跡;矢印参照)上に配置されている。また、ピペット洗浄部220は、試薬分注部90aのアーム部91bの原点位置(例えば、図1に示すアーム部91bの位置)から水平方向及び下方向に所定の距離だけ離れた位置に配置されている。したがって、試薬分注部90aのアーム部91bを原点位置からピペット洗浄部220の上方位置まで所定の距離だけ回動させ、さらにアーム部91bを下降させることによって、洗浄容器221の洗浄孔222にピペットPを挿入することが可能である。
【0047】
(位置確認用部材の構成)
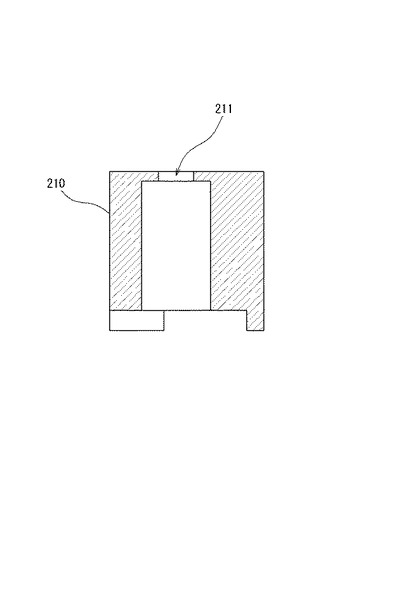
位置確認用部材210は、試薬分注部90aのピペットPを所定の位置に移動させたときに、ピペットPが当該所定位置に正確に配置されているかを確認するために用いられる。図5に示すように、位置確認用部材210は、上下方向に貫通する孔(空間部)211を有するブロック状に形成されている。この孔211は、ピペットPの外径よりもやや(2mm程度)大きく、ピペットPを僅かな隙間(半径で約1mmの隙間)をもって挿入することができる直径に形成されている。なお、孔211は、位置確認用部材210を貫通しない有底の孔であってもよい。また、孔211は、図9に示すように、上端部がピペットPの外径よりもやや大きく、ピペットPを僅かな隙間(半径で約1mmの隙間)をもって挿入することができる直径に形成されており、それ以外の部分が、ピペットPを十分な隙間をもって挿入することができる直径に形成されていてもよい。このような形状とすることにより、位置確認用部材210の位置確認の精度を保持しつつ、孔211の内壁面に付着した試薬や洗浄液によってピペットPが汚染される確率を低減させることができる。
【0048】
図1に示すように、位置確認用部材210は、平面視において、試薬分注部90aにおけるピペットPの移動軌跡(軸91cを中心とする回動軌跡;矢印参照)上に配置されている。また、位置確認用部材210は、試薬分注部90aのアーム部91bの原点位置(例えば、図1に示すアーム部91bの位置)から水平方向及び下方向に所定の距離だけ離れた位置に配置されている。したがって、アーム部91bを原点位置から位置確認用部材210の上方位置まで所定の距離だけ回動させ、さらにアーム部91bを下降させることによって、位置確認用部材210の孔211にピペットPの先端を挿入することが可能となっている。
【0049】
ピペットPは、測定ユニット2内においてユーザが接触する可能性がある場所に配置されている。そのため、ユーザが誤ってピペットPに接触し、ピペットPが曲がってしまう場合がある。また、試薬分注部90aの駆動部160は、長期使用によるベルトの延び等によって、所定の位置でピペットPの先端を正確に停止させることができなくなる場合がある。このような異常(ピペットPの形状異常、動作異常)が発生すると、位置確認用部材210の孔211にピペットPの先端を挿入することができなくなり、図5に2点鎖線で示すように、ピペットPの先端が位置確認用部材210に衝突する。
【0050】
前述したように、本実施の形態のアーム部91bには衝突検出用センサ170が設けられているので、ピペットPの先端が位置確認用部材210に衝突すると、そのことを測定制御部140によって検出することが可能である。言い換えると、測定制御部140によって、衝突検出用センサ170の出力に基づいて、ピペットPの先端が所定位置(孔211内)に有るか否かを検出することが可能となっている。本実施の形態では、位置確認用部材210や衝突検出用センサ170によって、ピペットPの先端が所定位置に有るか否かを確認するための位置確認手段が構成されている。
【0051】
[制御装置の構成]
制御装置400は、パーソナルコンピュータ401(PC)等からなり、図1に示されるように、制御部400aと、表示部400bと、キーボードやマウス等の入力部(入力手段)400cとを含んでいる。制御部400aは、測定ユニット2における各機構の動作制御を行うとともに、測定ユニット2で得られた検体の光学的な情報を分析するための機能を有している。この制御部400aは、CPU、ROM、RAM等からなる。また、表示部400bは、制御部400aで得られた分析結果等の情報等を表示するために用いられる。
【0052】
次に、制御装置400の各構成を説明する。制御部400aは、図3に示されるように、CPU401aと、ROM401b,RAM401c及びハードディスク401d等からなる記憶部と、読出装置401eと、入出力インタフェース401fと、通信インタフェース401gと、画像出力インタフェース401hとから主として構成されている。
CPU401a、ROM401b、RAM401c、ハードディスク401d、読出装置401e、入出力インタフェース401f、通信インタフェース401g、及び画像出力インタフェース401hは、バス401iによって接続されている。
【0053】
CPU401aは、ROM401bに記憶されているコンピュータプログラム及びRAM401cにロードされたコンピュータプログラムを実行することが可能である。そして、後述するようなアプリケーションプログラム404aをCPU401aが実行することにより、コンピュータ401が制御装置400として機能する。
ROM401bは、マスクROM、PROM、EPROM、EEPROM等によって構成されており、CPU401aに実行されるコンピュータプログラム及びこれに用いるデータ等が記録されている。
【0054】
RAM401cは、SRAM又はDRAM等によって構成されている。RAM401cは、ROM401b及びハードディスク401dに記録されているコンピュータプログラムの読み出しに用いられる。また、これらのコンピュータプログラムを実行するときに、CPU401aの作業領域として利用される。
【0055】
ハードディスク401dは、オペレーティングシステム及びアプリケーションプログラム等、CPU401aに実行させるための種々のコンピュータプログラム404a及びそのコンピュータプログラムの実行に用いるデータがインストールされている。例えば、測定オーダを登録するためのアプリケーションプログラムや、測定ユニット2の動作を制御するためのアプリケーションプログラムもこのハードディスク401dにインストールされている。
【0056】
読出装置401eは、フレキシブルディスクドライブ、CD−ROMドライブ、又はDVD−ROMドライブ等によって構成されており、可搬型記録媒体404に記録されたコンピュータプログラム又はデータを読み出すことができる。また、可搬型記録媒体404には、本実施の形態におけるアプリケーションプログラム404aが格納されており、コンピュータ401が、その可搬型記録媒体404からアプリケーションプログラム404aを読み出し、そのアプリケーションプログラム404aをハードディスク401dにインストールすることが可能である。
【0057】
なお、前記アプリケーションプログラム404aは、可搬型記録媒体404によって提供されるのみならず、電気通信回線(有線、無線を問わない)によってコンピュータ401と通信可能に接続された外部の機器から前記電気通信回線を通じて提供することも可能である。例えば、前記アプリケーションプログラム404aがインターネット上のサーバコンピュータのハードディスク内に格納されており、このサーバコンピュータにコンピュータ401がアクセスして、そのアプリケーションプログラム404aをダウンロードし、これをハードディスク401dにインストールすることも可能である。
【0058】
ハードディスク401dには、例えば、米マイクロソフト社が製造販売するWindows(登録商標)等のグラフィカルユーザインタフェース環境を提供するオペレーティングシステムがインストールされている。以下の説明においては、本実施の形態におけるアプリケーションプログラム404aは前記オペレーティングシステム上で動作するものとしている。
【0059】
入出力インタフェース401fは、例えば、USB、IEEE1394、RS−232C等のシリアルインタフェース、SCSI、IDE、IEEE1284等のパラレルインタフェース、及びD/A変換器、A/D変換器等からなるアナログインタフェース等から構成されている。入出力インタフェース401fには、キーボード400cが接続されており、ユーザがそのキーボード400cを使用することにより、コンピュータ401にデータを入力することが可能である。
【0060】
通信インタフェース401gは、例えば、Ethernet(登録商標)インタフェースである。コンピュータ401は、その通信インタフェース401gにより、所定の通信プロトコルを使用して測定ユニット2との間でデータの送受信が可能である。
画像出力インタフェース401hは、LCD又はCRT等で構成された表示部400bに接続されており、CPU401aから与えられた画像データに応じた映像信号を表示部400bに出力するようになっている。表示部400bは、入力された映像信号にしたがって、画像(画面)を表示する。
【0061】
[免疫分析装置による分析処理の全体プロセス]
免疫分析装置1による分析処理の全体のフローを図4に示す。以下、免疫分析装置1による分析処理の全体を説明する。なお、以下に説明する処理は、制御装置400の制御部400a又は測定ユニット2の測定制御部140によって制御される処理である。
【0062】
まず、免疫分析装置1の電源が投入されると、測定制御部140の初期化が行われる(ステップS1)。この初期化動作では、プログラムの初期化や免疫分析装置1の駆動部分の原点位置復帰などが行われる。
一方、前記免疫分析装置1に通信可能に接続された制御装置400の電源が投入されると、当該制御装置400の制御部400aの初期化が行われる(ステップS101)。この初期化動作では、プログラムの初期化などが行われる。
測定制御部140及び制御装置400の初期化が終了すると、免疫分析装置1は測定(分析)開始可能な状態(スタンバイ状態)となる。
【0063】
ついでステップS102において、免疫分析装置1を用いて分析を行う検体のオーダ登録が行われる(ステップS102)。このオーダ登録は、例えば、ユーザが検体番号や測定項目(分析項目)などの情報をキーボード(入力手段)400cから入力し、内容確認後、ユーザがオーダ登録の指示ボタンをクリックすることで行われる。制御部400aにより実行されたオーダ登録は、ハードディスク401dの記憶領域に記憶される。
【0064】
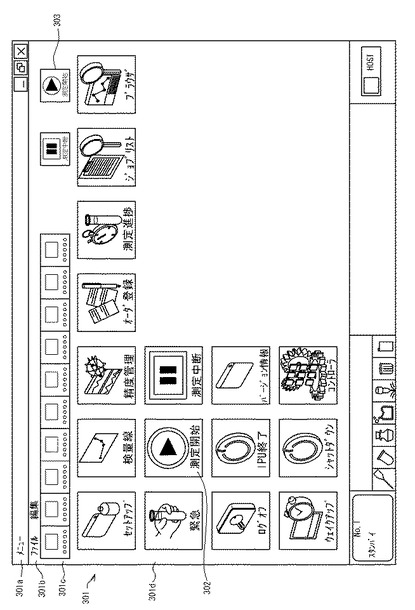
ついでステップS103において、制御部400aによって、測定開始の指示が受け付けられたか否かが判断される。図8は、スタンバイ状態で制御装置400の表示部400bに表示されるメニュー画面301を示す図であり、このメニュー画面301には、タイトルバー301a、メニューバー301b、ツールバー301c、及び主表示部301d等が表示されている。ツールバー301c及び主表示部301dには「測定開始」ボタン303,302が設けられており、ユーザがこの「測定開始」ボタン303,302を押す(クリックする)ことによって、免疫分析装置1に対して測定開始の指示を与えることができる。
【0065】
制御部400aは、測定開始の指示が受け付けられたと判断した場合(Yes)にはステップS104へ処理を進め、測定開始の指示が受け付けられなかったと判断した場合(No)にはステップS119へ処理を進める。そして、ステップS104において、制御部400aは、測定開始信号を測定制御部140へ送信する。
【0066】
ついでステップS2において、測定制御部140によって、測定開始信号の受信が行われたか否かが判断される。測定制御部140は、測定開始信号の受信が行われたと判断した場合(Yes)にはステップS3へ処理を進め、測定開始信号の受信が行われなかったと判断した場合(No)にはステップS23へ処理を進める。
ステップS3において、測定制御部140は、試薬分注部90a〜90cのピペットPの初期化動作、すなわち、ピペットPをその原点位置まで戻す動作を行う。その後、ステップS4へ処理を進める。
ステップS4において、試薬分注部90a〜90cのピペットPの洗浄が行われる。具体的には、図7に示すように試薬分注部90a〜90cのピペットPが洗浄容器221に挿入され、洗浄ノズル222から吐出された洗浄液がピペットPに吹き付けられる。
【0067】
ついでステップS5において、試薬分注部90a〜90cのピペットPの移動が行われる。具体的には、図5に示すように、駆動部160によってピペットPが位置確認用部材210の上方位置まで移動させられ、その後、ピペットPを下降させることによって、ピペットPの先端が位置確認用部材210の孔211に挿入される。これにより、ピペットPの先端は、確認位置Qに配置される。
【0068】
ステップS6において、ピペットPの先端が位置確認用部材210の孔211に挿入された際に、測定制御部140は、衝突検出用センサ170の出力に基づいて、ピペットPと位置確認用部材210とが衝突したか否かを判断することにより、ピペットPの先端が確認位置Qまで到達したことを確認する。具体的には、ピペットPの先端が位置確認用部材210の孔211に挿入された際に、衝突検出用センサ170が何も検知せず出力に変化が無かった場合(すなわち、衝突検出用センサ170が遮光板173aによって遮光されたままの状態である場合)に、ピペットPの先端が確認位置Qまで到達したと判断し、衝突検出用センサ170が何も検知せず出力に変化があった場合(すなわち、衝突検出用センサ170の遮光板173aによる遮光が解除され、衝突検出用センサ170がオンとなった場合)に、ピペットPと位置確認用部材210とが衝突し、ピペットPの先端が確認位置Qまで到達しなかった判断する。測定制御部140が、位置確認用部材210の孔211内に位置する確認位置QまでピペットPの先端が到達したと判断した場合(Yes)にはステップS9へ処理を進め、位置確認用部材210に孔211内に位置する確認位置QまでピペットPの先端が挿入されていないと判断した場合(No)にはステップS7へ処理を進める。
【0069】
ステップS7において、測定制御部140によって、ピペットPの位置確認エラーの信号が制御装置400に送信され、ステップS8へ処理を進める。
次に、ステップS8において、測定制御部140は、ピペットPを上死点まで移動させた後、ピペットPおよび装置全体の動作を中断させる。その後、ステップS23へ処理を進める。
ステップS105において、制御部400aによって、エラー信号の受信が行われたか否かが判断される。制御部400aは、エラー信号の受信が行われたと判断した場合(Yes)にはステップS106へ処理を進め、エラー信号の受信が行われなかったと判断した場合(No)にはステップS109へ処理を進める。
【0070】
ステップS106において、制御部400aによって、ピペットPの位置確認エラー表示が表示部400bに行われる。このエラー表示は、例えば、ピペットPが曲がっていることやピペットPの移動に不具合があることの表示、新しいピペットPへの交換を促す表示とされる。ユーザは、このエラー表示を見ることによってピペットPの形状異常や動作異常を認識し、ピペットPを交換する等の対処を行うことが可能である。また、このエラー表示は、装置状態をスタンバイ状態に戻すための確認ボタンと、ピペットの位置調整を実行するためのピペット位置調整ボタンとを含む。
【0071】
次に、ステップS107において、制御部400aは、確認ボタンが選択されたか、ピペット位置調整ボタンが選択されたかを判断し、確認ボタンが選択された場合には、処理をステップS119に進めるとともに、装置をスタンバイ状態に戻す。ステップS107においてピペット位置調整ボタンが選択された場合には、ステップS108において、ピペットの位置を調整する処理を実行する。
【0072】
次に、ステップS9において、検体搬送部10により、検体を収容した複数の試験管3が載置されたラック4が検体分注アーム50の吸引位置に対応する位置まで搬送される。前記ラック4には、当該ラック4を特定するための情報(ラック番号)が記録されたバーコードが付されており、このラック4を所定の位置まで搬送する搬送路に設けられたバーコードリーダ150(図3参照)によって、前記バーコードが読み取られる(ステップS10)。読み取られたラック番号は、ステップS11において、測定制御部140によって制御装置400側に送信される。
【0073】
ついでステップS109において、制御部400aによって、ラック番号の受信が行われたか否かが判断される。制御部400aが、ラック番号の受信が行われたと判断した場合(Yes)にはステップS110へ処理を進める。
【0074】
ついでステップS110において、制御部400aによって、オーダページの検索が行われる。すなわち、制御部400aは、ハードディスク401dの記憶領域に記憶されているオーダ情報から、ステップS109において受信したラック番号に係るオーダ情報を検索する。
【0075】
前記試験管3には、前記ラック4と同様に当該試験管3内の検体を特定するための情報(検体番号)が記録されたバーコードが付されており、試験管3を載置したラック4を所定の位置まで搬送する搬送路に設けられたバーコードリーダ150(図3参照)によって、前記バーコードが読み取られる(ステップS12)。測定制御部140は、ステップS13において、読み取られた検体番号を制御装置400側に送信する。なお、試験管3とラック4のバーコードは、別々のバーコードリーダで読み取るようにしてもよいし、共通のバーコードリーダで読み取るようにしてもよい。
【0076】
ついでステップS111において、制御部400aによって、検体番号の受信が行われたか否かが判断される。制御部400aが、検体番号の受信が行われたと判断した場合(Yes)にはステップS112へ処理を進める。
【0077】
ついでステップS112において、制御部400aによってオーダの検索が行われる。すなわち、制御部400aは、ステップS110において検索された、特定のラック番号に係るオーダ情報から、ステップS111において受信した検体番号に係るオーダ情報を検索する。そして、ステップS113において、制御部400aは、オーダの指示を測定制御部140へ送信する。
【0078】
ついでステップS14において、測定制御部140によって、オーダ指示の受信が行われたか否かが判断される。測定制御部140が、オーダ指示の受信が行われたと判断した場合(Yes)にはステップS15へ処理を進める。
【0079】
ついでステップS15において、オーダされた項目についての測定が行われる。具体的には、検体分注部50によって試験管3内の検体がキュベットに分注され、ついで、試薬分注部90a等によって所定の試薬がキュベットに分注され(ステップS16)、B/F分離部100a,100b等において所定の処理が行われることによって、試薬と試料とを混和して調製した測定試料が作成される。試薬分注後のピペットPは、ピペット洗浄部220によって洗浄される(ステップS17)。その後、検出部120によって、測定試料に対して所定の測定が行われ(ステップS18)、その測定結果が、測定制御部140によって制御装置400側に送信される(ステップS19)。
【0080】
ついでステップS114において、制御部400aによって、測定結果の受信が行われたか否かが判断される。制御部400aが、測定結果の受信が行われたと判断した場合(Yes)にはステップS115へ処理を進める。
【0081】
ステップS115では、測定制御部140側から送信された測定結果の解析処理が行われる。すなわち、制御部400aは、送信された測定結果と、予め標準試料を用いて作成され、前記ハードディスク401dに記憶されている検量線とから、測定対象の抗原の濃度を換算し、その結果(分析結果)を記憶する。また、制御部400aは、表示部400bに分析結果の出力を行う(ステップS116)。
【0082】
ついでステップS117において、制御部400aによって、ラック4に保持されているすべての試験管3中の検体について測定が行われたか否かが判断される。制御部400aは、ラック4に保持されているすべての試験管3中の検体について測定が行われたと判断した場合(Yes)にはステップS118へ処理を進め、ラック4に保持されているすべての試験管3中の検体については測定が行われていないと判断した場合(No)にはステップS111へ処理を戻す。
【0083】
ついでステップS118において、制御部400aによって、すべてのラック4について測定が行われたか否かが判断される。制御部400aは、すべてのラック4について測定が行われたと判断した場合(Yes)にはステップS119へ処理を進め、すべてのラック4については測定が行われていないと判断した場合(No)にはステップS105へ処理を戻す。
【0084】
ついでステップS119において、制御部400aによって、制御装置400をシャットダウンする指示を受け付けているか否かが判断される。制御部400aは、シャットダウンする指示を受け付けていると判断した場合(Yes)にはステップS120へ処理を進め、シャットダウンする指示を受け付けていないと判断した場合(No)にはステップS102へ処理を戻す。
【0085】
ついでステップS120において、シャットダウン信号が制御部400aから測定制御部140へ送信される。
そして、ステップS121において、制御部400aにより、制御装置400のシャットダウンが行われ、処理が終了する。
【0086】
また、ステップS20において、測定制御部140によって、ラック4に保持されているすべての試験管3中の検体について測定が行われたか否かが判断される。測定制御部140は、ラック4に保持されているすべての試験管3中の検体について測定が行われたと判断した場合(Yes)にはステップS22へ処理を進め、ラック4に保持されているすべての試験管3中の検体については測定が行われていないと判断した場合(No)には、ラック4を所定距離(次に測定される検体を収容する試験管が被吸引位置に到達する距離)だけ搬送するように検体搬送部10を制御し(ステップS21)、ステップS12へ処理を戻す。
【0087】
ついでステップS22において、測定制御部140によって、すべてのラック4について測定が行われたか否かが判断される。測定制御部140は、すべてのラック4について測定が行われたと判断した場合(Yes)にはステップS23へ処理を進め、すべてのラック4については測定が行われていないと判断した場合(No)にはステップS4へ処理を戻す。
【0088】
ついでステップS23において、測定制御部140によって、シャットダウン信号の受信が行われたか否かが判断される。測定制御部140は、シャットダウン信号の受信が行われたと判断した場合(Yes)にはステップS24へ処理を進め、シャットダウン信号の受信が行われていないと判断した場合(Yes)にはステップS2へ処理を戻す。
そして、ステップS24において、測定制御部140によって、免疫分析装置1のシャットダウンが行われ、処理が終了する。
【0089】
以上に説明した免疫分析装置1の全体プロセスにおいて、試薬分注部90a〜90cのピペットPの位置確認動作(ステップS6)は、制御装置400や測定ユニット2の初期化(ステップS1,S101)が行われた後、測定開始可能な状態になってから、所定の動作シーケンスに従って自動的に行われる。そのため、ユーザがピペットPの位置確認の操作を意図的に行う必要が無く、ピペットPの位置確認を行うタイミングをユーザ自身が管理する必要がない。従って、ユーザの負担を軽減することができる。
【0090】
また、試薬分注部90a〜90cのピペットPの位置確認動作は、制御装置400において測定開始の指示が受け付けられた後に行われている。したがって、測定(分析)の度にピペットPの位置確認が必ず行われることになる。そのため、測定中、ピペットPの異常(形状異常、動作異常)によって、ピペットPが試薬容器等に衝突して破損したり、ピペットPの洗浄が不十分となることにより、測定結果の信頼性が低下したりするのを防止することができる。
【0091】
試薬分注部90a〜90cのピペットPの位置確認動作は、位置確認用部材210の孔211内にピペットPを挿入することによって行われ、ピペットPが正常である場合には位置確認用部材210に接触することがほとんどないので、ピペットPや位置確認部材210の汚染を防止することができる。
また、試薬分注部90a〜90cのピペットPの位置確認動作は、ピペットPが洗浄された直後(ステップS4〜S6)に行われるので、位置確認用部材210へのピペットPの接触や接近で、位置確認用部材210が汚染されてしまうのを防止することができる。
【0092】
試薬分注部90a〜90cのピペットPの位置確認動作は、検体分注部50によって検体が分注される前に行われるので、ピペットPの異常が判明したことによって測定が中断されてしまっても、検体を無駄にしてしまうことはない。
【0093】
本発明は前述の実施の形態に限定されることなく適宜設計変更可能である。
例えば、前述の実施の形態では、ピペットPの位置確認用のセンサとして、衝突検出用センサ170が用いられているが、位置確認専用のセンサを別途設けてもよい。例えば、位置確認用部材210として、投光部と受光部とを有する透過型センサを用い、投光部と受光部との間(空間部)にピペットPの先端が挿入されたか否かを当該透過型センサによって検出するように構成してもよい。
また、前述の実施の形態では、測定制御部140は、ピペットPの先端の位置を確認するように構成されているが、ピペットPの中間部の位置や、ピペットから吐出される液体の位置などを確認することによって、ピペットの位置を確認するように構成してもよい。
【0094】
試薬分注部90a〜90cのピペットPの位置確認動作は、免疫分析装置1がスタンバイ状態にあるときに所定間隔毎(例えば、30分毎)に行うようにしてもよい。この場合、スタンバイ状態の間にユーザがピペットPに触れることによってピペットPが曲がってしまったとしても、そのことを測定が開始される前に検出することが可能となる。したがって、ピペットPが曲がったまま測定が開始され、測定中にピペットPが試薬容器等に接触して破損してしまったり、ピペットPの洗浄が不十分となって測定結果の信頼性が低下してしまったりすることを防止することができる。
【0095】
前述の実施の形態に係る免疫分析装置1は、ピペットPの位置確認動作を行うために、位置確認専用の位置確認用部材210を備えているが、試薬容器201,202や洗浄容器221を位置確認用部材として用いることも可能である。この場合、試薬容器201,202の開口や洗浄容器221の開口を孔(空間部)とし、当該孔にピペットPが挿入されるか否かによって、ピペットPの先端の位置を確認することができる。ただし、前述の実施の形態のように、位置確認専用の位置確認用部材210を用いた場合、自由に孔211の直径を定めることができるため、より高精度なピペットPの位置確認動作を行うことが可能となる。
【0096】
前述の実施の形態に係る免疫分析装置1は、試薬分注部90a〜90cのピペットPの位置確認動作を行うように構成されているが、検体分注部50のピペットの位置確認を行うように構成されていてもよい。
本発明は、免疫分析装置に限らず、血液凝固測定装置、多項目血球分析装置、尿中有形成分分析装置、遺伝子増幅測定装置等の他の分析装置にも適用可能である。
【図面の簡単な説明】
【0097】
【図1】本発明の一実施の形態に係る免疫分析装置(検体分析装置)の全体構成を示す平面説明図である。
【図2】図1に示される免疫分析装置の測定ユニットの構成を示すブロック図である。
【図3】図1に示される免疫分析装置の測定制御部及び制御装置の構成を示すブロック図である。
【図4】図1に示される免疫分析装置の分析処理全体のフローを示す図である。
【図5】図1に示される免疫分析装置の試薬分注部の構成を概略的に示す側面図である。
【図6】図1に示される免疫分析装置のアーム部及び衝突検出用センサを示す斜視図である。
【図7】図1に示される免疫分析装置のピペット洗浄部を示す断面図である。
【図8】図1に示される免疫分析装置の表示部に表示されるメニュー画面を示す図である。
【図9】図5に示される位置確認用部材の一例を示す図である。
【符号の説明】
【0098】
1 免疫分析装置
2 測定ユニット
90a〜90e 試薬分注部
140 測定制御部
160 駆動部
170 衝突検出用センサ(検出部)
210 位置確認用部材
211 孔
400 制御装置
400a 制御部
【技術分野】
【0001】
本発明は、免疫分析装置や血液凝固分析装置等の検体を分析する検体分析装置に関する。
【背景技術】
【0002】
検体と試薬とを混和して調製された試料を測定することによって、検体の成分を分析する検体分析装置が従来から知られている。この検体分析装置は、試薬が収容された試薬容器から試薬を吸引するとともに、吸引した試薬をキュベット(反応容器)内に吐出するように構成された試薬分注部を備えている。この試薬分注部は、所定の動作シーケンスに従って、検体分析装置に設けられた制御部によって動作制御される。
【0003】
試薬容器には、試薬の吸引のために試薬分注部のピペットが挿入される開口部が設けられている。この開口部は、試薬の蒸発やコンタミネーション等を防ぐため、可及的に小さく形成されている。そのため、ピペットが開口部に正確に位置づけられていなければ、試薬を適切に吸引することができない。
したがって、試薬の分注を適切に行うには、ピペットが所定の位置に正確に位置づけられるように調整することが必要である。
【0004】
分注部のピペットが所定の位置に位置づけられるように調整を行うことは、下記特許文献1に開示されている。この特許文献1によれば、分注部のピペットの調整は、分析装置の設置時や分注部に関連する部品の交換時に使用者が所定の調整プログラムを実行することによって行われている。
【0005】
【特許文献1】特開2001−91522号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
検体分析装置を長期間使用していると、試薬分注部を駆動する機構の劣化等(駆動ベルトの伸び等)によりピペットの停止位置が徐々にずれてくる場合がある。また、分注部のピペットにユーザが触れてしまうことによって、ピペットが曲がってしまうこともある。このような場合に分析装置によって分析動作を行うと、ピペットの先端部を所定の位置に正確に位置づけることが困難となり、ピペットが試薬容器等に接触して破損するおそれがある。
【0007】
また、特許文献1の技術では、ピペットが所定位置に位置づけられるように調整を行うことはできるが、上記のような検体分析装置を長期間使用することによって生じるピペットの破損を防止することはできない。
【0008】
本発明は、ピペットの移動動作の異常およびピペットの変形などによる当該ピペットの破損を未然に防止することができる検体分析装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の検体分析装置は1つの観点から、検体と試薬とを混和して検体を分析する検体分析装置であって、試薬又は検体を分注するためのピペットと、前記ピペットを移動させるピペット移動機構と、所定位置に配置された位置確認部と、前記ピペット移動機構により前記ピペットを前記位置確認部に移動させ、前記ピペットが前記所定位置に配置されたことを確認する位置確認処理を実行する位置確認実行手段と、を備えていることを特徴とする。
【0010】
この構成によれば、ピペットの位置確認処理を実行することにより、ピペットの移動動作およびピペットの形状などが正常であることを確認することができるので、ピペットの移動動作の異常およびピペットの変形などによる当該ピペットの破損を未然に防止することができる。
【0011】
上記観点による検体分析装置の前記位置確認処理は、前記ピペットの先端部が前記所定位置に配置されるように前記ピペットを移動させ、移動させた前記ピペットの先端部が前記所定位置に配置されたか否かを判定することによって前記ピペットが前記所定位置に配置されたことを確認する処理であってもよい。
このように構成することにより、ピペットの先端部が前記所定位置に配置されたか否かを判定すればピペットが所定位置に配置されたことを確認することができるので、ピペットの位置確認に必要となる装置構成を簡略化することができる。
【0012】
上記観点による検体分析装置の前記位置確認実行手段は、自動的に、前記位置確認処理を実行するように構成されていてもよい。
このように構成することにより、自動的に、前記位置確認処理を実行するので、分析装置の使用者が特別な操作をしなくても、ピペットの位置確認が実行され、ピペットの破損をより確実に防止することができる。
【0013】
上記観点による検体分析装置は、前記検体分析装置による分析開始の指示を受け付ける分析開始指示受付手段をさらに備え、前記位置確認実行手段が、前記分析開始指示受付手段によって前記分析開始の指示が受け付けられたときに、前記位置確認処理を実行するよう構成されていてもよい。
このように構成することにより、分析装置の使用者が特別な操作をしなくても、分析開始の指示毎にピペットの位置確認が実行されるので、ピペットの破損をより確実に防止することができる。
【0014】
上記観点による検体分析装置は、分析開始指示受付手段が、複数の検体についての1つの分析開始の指示を受け付け、前記位置確認実行手段が、前記分析開始指示受付手段によって前記複数の検体についての1つの分析開始の指示が受け付けられた後、前記検体に対して最初の処理が行われる前に、前記位置確認処理を実行するように構成されていてもよい。
このように構成することにより、1検体毎にピペットの位置確認を実行する場合に比べて、検体の処理時間を短縮することができる。また、検体に対して最初の処理が行われる前にピペットの位置確認が実行されるので、ピペットの位置が確認できないまま検体の処理を開始することを防止することができる。これにより、検体の処理中に装置の動作エラーが発生し、処理中の検体および試薬を無駄にしてしまうことを防止することができる。
【0015】
上記観点による検体分析装置の前記位置確認実行手段が、前記検体分析装置が分析開始可能な状態で待機しているときに、所定の時間毎に前記位前記確認処理を実行するように構成されていてもよい。
このように構成することにより、分析装置の使用者が特別な操作をしなくても、所定の時間毎にピペットの位置確認が実行されるので、ピペットの破損をより確実に防止することができる。
【0016】
上記観点による検体分析装置の前記位置確認部は、前記ピペットの先端部が挿入可能な空間を有する位置確認用部材を備え、前記分析装置は、前記ピペットが前記位置確認用部材に衝突したか否かを検知するためのセンサをさらに備え、前記位置確認実行手段は、前記センサの出力に基づいて、前記ピペットが前記所定位置に配置されたか否かを確認してもよい。
このように構成することにより、簡単な装置構成でピペットの位置確認を実行することができる。また、ピペットが所定位置に配置された場合にはピペットはどこにも接触しないので、ピペットの位置確認によってピペットが破損してしまうことを防止することができる。
【0017】
上記観点による検体分析装置は、前記位置確認実行手段が、前記ピペットが前記所定位置に配置されたことを確認できなかった場合に、前記ピペットの形状または移動に不具合がある旨を通知する通知手段をさらに備えていてもよい。
このように構成することにより、分析装置の使用者は、ピペットの形状または移動に不具合があることを容易に知ることができる。
【0018】
上記観点による検体分析装置は、前記位置確認実行手段が、前記ピペットが前記所定位置に配置されたことを確認できなかった場合に、前記ピペットの動作を停止させるピペット動作停止手段をさらに備えてもよい。
このように構成することにより、分析装置の使用者は、ピペットが停止した状態で装置の状態を確認することが可能となるので、装置状態確認中にピペットが動作することによってピペットが使用者の手や腕などと接触し、使用者が怪我をしたり、ピペットが破損したりすることを防止することができる。
【発明の効果】
【0019】
本発明によれば、ピペットの移動動作の異常およびピペットの変形などによる当該ピペットの破損を未然に防止することができる。
【発明を実施するための最良の形態】
【0020】
以下、添付図面を参照しつつ、本発明の検体分析装置の実施の形態を詳細に説明する。
[装置の全体構成]
図1は、本発明の一実施の形態に係る免疫分析装置(検体分析装置)の全体構成を示す平面説明図、図2は、図1に示される免疫分析装置における測定ユニットの構成を示すブロック図である。
本発明の一実施の形態に係る免疫分析装置1は、血液等の検体(試料)を用いてB型肝炎、C型肝炎、腫瘍マーカ及び甲状腺ホルモン等種々の測定項目の検査を行うための装置である。この免疫分析装置1は、図1に模式的に示されるように、複数の機構(コンポーネント)からなる測定ユニット(測定部)2と、この測定ユニット2に電気的に接続された、データ処理ユニットである制御装置400とから主に構成されている。
【0021】
測定ユニット2は、検体搬送部(サンプラ)10と、緊急検体・チップ搬送部20と、ピペットチップ供給装置30と、チップ脱離部40と、検体分注部50と、試薬設置部60(60a及び60b)と、1次反応部80a及び2次反応部80bと、試薬分注部90(90a〜90e)と、B/F分離部100(100a,100b)と、検出部120と、前記検体搬送部(サンプラ)10や検体分注部50等の機構の動作制御を行う測定制御部140(図2参照)等を備えている。なお、本実施の形態に係る免疫分析装置1では、検体分注部50により吸引及び吐出された血液等の検体が他の検体と混ざり合うのを抑制するために、検体の吸引及び吐出を行う度に、使い捨てのピペットチップの交換を行っている。
【0022】
この免疫分析装置1では、測定対象(分析対象)である血液等の検体に含まれる抗原に結合した捕捉抗体(R1試薬)に磁性粒子(R2試薬)を結合させた後に、結合(Bound)した抗原、捕捉抗体及び磁性粒子を1次B/F(Bound Free)分離部100aの磁石に引き寄せることにより、未反応(Free)の捕捉抗体を含むR1試薬を除去する。そして、磁性粒子が結合した抗原と標識抗体(R3試薬)とを結合させた後に、結合(Bound)した磁性粒子、抗原及び標識抗体を2次B/F分離部100bの磁石に引き寄せることにより、未反応(Free)の標識抗体を含むR3試薬を除去する。さらに、分散液(R4試薬)や標識抗体との反応過程で発光する発光基質(R5試薬)を添加した後、標識抗体と発光基質との反応によって生じる発光量を測定する。このような過程を経て、標識抗体に結合する検体に含まれる抗原を定量的に測定している。
【0023】
[測定ユニットの構成]
測定ユニット2の各機構の構成としては、公知の構成を適宜採用することができるが、以下、図1〜図3を参照して、それらについて簡単に説明をする。
図3に示すように、測定制御部140は、CPU140aと、ROM140b及びRAM140c等からなる記憶部と、入出力インタフェース140dと、通信インタフェース140eとから主として構成されている。CPU140a、ROM140b、RAM140c、入出力インタフェース140d、通信インタフェース140eは、バス140fによって接続されている。
【0024】
CPU140aは、ROM140bに記憶されているコンピュータプログラム141及びRAM140cにロードされたコンピュータプログラムを実行することが可能である。 ROM140bは、マスクROM、PROM、EPROM、EEPROM等によって構成されており、CPU140aに実行されるコンピュータプログラム及びこれに用いるデータ等が記録されている。
【0025】
RAM140cは、SRAM又はDRAM等によって構成されている。RAM140cは、ROM140bに記録されているコンピュータプログラムの読み出しに用いられる。また、これらのコンピュータプログラムを実行するときに、CPU140aの作業領域として利用される。
【0026】
入出力インタフェース140dは、例えば、USB、IEEE1394、RS−232C等のシリアルインタフェース、SCSI、IDE、IEEE1284等のパラレルインタフェース、及びD/A変換器、A/D変換器等からなるアナログインタフェース等から構成されている。入出力インタフェース140dにはバーコードリーダ150が接続されている。検体を収容する試験管3(図1参照)や、複数本の試験管3が載置されるラック4(図1参照)には、当該試験管3内の検体やラック4を特定するための情報を記録したバーコードが付されている。バーコードリーダ150は、この試験管3やラック4に付されたバーコードを読み取るために使用される。
【0027】
通信インタフェース140eは、例えば、Ethernet(登録商標)インタフェースである。測定制御部140は、通信インタフェース140eにより、所定の通信プロトコルを使用してコンピュータ401との間でデータの送受信が可能である。
【0028】
図1及び図2に示すように、検体搬送部10は、検体を収容した複数の試験管3が載置されたラック4を検体分注部50の吸引位置に対応する位置まで搬送するように構成されている。この検体搬送部10は、未処理の検体を収容した試験管3が載置されたラック4をセットするためのラックセット部10aと、分注処理済みの検体を収容した試験管3が載置されたラック4を貯留するためのラック貯留部10bとを有している。そして、未処理の検体を収容した試験管3を検体分注部50の吸引位置に対応する位置まで搬送することにより、検体分注部50により試験管3内の血液等の検体の吸引が行われ、その試験管3を載置したラック4がラック貯留部10bに貯留される。
【0029】
緊急検体・チップ搬送部20は、検体搬送部10により搬送される検体に割り込んで検査する必要がある緊急検体を収容した試験管3を検体分注部50の装着位置まで搬送するように構成されている。
ピペットチップ供給装置30は、投入したピペットチップを1つずつ緊急検体・チップ搬送部20の搬送ラック23のチップ設置部23aに載置する機能を有している。
チップ脱離部40は、後述する検体分注部50に装着されたピペットチップを脱離するために設けられている。
【0030】
検体分注部50は、検体搬送部10により吸引位置に搬送された試験管3内の検体を、後述する1次反応部80aの1次反応テーブル81の保持部81aに保持されるキュベット(図示せず)内に分注する機能を有している。この検体分注部50は、アーム部51を、軸52を中心に回動させるとともに、上下方向に移動させることが可能なように構成されている。また、アーム部51の先端部には、検体の吸引及び吐出を行うノズル部が設けられており、このノズル部の先端には、緊急検体・チップ搬送部20の搬送ラック(図示せず)により搬送されるピペットチップが装着される。
【0031】
試薬設置部60aは、回転駆動される回転テーブルであり、捕捉抗体を含むR1試薬が収容される試薬容器201及び標識抗体を含むR3試薬が収容される試薬容器202が設置される。
一方、試薬設置部60bは、回転駆動される回転テーブルであり、磁性粒子を含むR2試薬が収容される試薬容器が設置される。
【0032】
1次反応部80aは、回転駆動される1次反応テーブル81の保持部81aに保持されるキュベットを所定の期間(本実施の形態では、20秒)毎に所定の角度だけ回転移送するとともに、キュベット内の検体、R1試薬及びR2試薬を攪拌するために設けられている。つまり、1次反応部80aは、キュベット内で磁性粒子を有するR2試薬と検体中の抗原とを反応させるために設けられている。この1次反応部80aは、検体とR1試薬及びR2試薬とが収容されるキュベットを回転方向に搬送するための1次反応テーブル81と、キュベット8内の検体、R1試薬及びR2試薬を攪拌するとともに、攪拌された検体、R1試薬及びR2試薬が収容されたキュベットを後述する1次B/F分離部100aに搬送する容器搬送部82とから構成されている。
【0033】
容器搬送部82は、1次反応テーブル81の中心部分に回転可能に設置されている。この容器搬送部82は、1次反応テーブル81の保持部81aに保持されるキュベットを把持するとともにキュベット内の試料を攪拌する機能を有している。さらに、容器搬送部82は、検体、R1試薬及びR2試薬を攪拌してインキュベーションした試料を収容したキュベットを1次B/F分離部100aに搬送する機能も有している。
【0034】
試薬分注部90aは、試薬設置部60aに設置される試薬容器内のR1試薬を吸引するとともに、その吸引したR1試薬を1次反応部80aのキュベット内に分注するための機能を有している。この試薬分注部90aは、アーム部91bを、軸91cを中心に回動させるとともに上下方向に移動させることが可能な駆動部160(図5参照)を備えている。アーム部91bの先端部には、試薬容器201内のR1試薬の吸引及び吐出を行うためのピペットP(図5参照)が取り付けられている。また、試薬分注部90aは、ピペットPが障害物に衝突したことを検出するために用いられる衝突検出用センサ170(図6参照)を備えている。なお、駆動部160は、後述するようにピペットPの先端を所定位置(位置確認用部材210(図5参照)の位置)に移動させるピペット移動機構を構成する。
【0035】
図5は、試薬分注部の構成を概略的に示す側面図である。この図に示すように、駆動部160は、回転用モータ161と、昇降用モータ162と、回転用モータ161及び昇降用モータの動力を軸91cに伝達する伝達機構163とを備えている。伝達機構163は、例えば回転用モータ161の回転動力を減速して軸91cに伝達するベルト伝動機構やギヤ機構等、昇降用モータ162の回転動力を上下方向の直線動力に変換して軸91cに伝達するベルト伝動機構やラック・ピニオン機構等からなる。回転用モータ161や昇降用モータ162の回転パルスはエンコーダ(図示略)によって検出される。
【0036】
図6は、アーム部91b及び衝突検出用センサ170を示す斜視図である。この図には、上部カバー91b1(2点鎖線で示す)が取り外されることによって内部が露出したアーム部91bが示されている。ピペットPは、アーム部91bに上下方向に移動(摺動)可能に支持されるとともに、下方への移動が所定に規制されている。また、ピペットPは、圧縮コイルバネからなる付勢部材171によって下方へ付勢されている。アーム部91bには、ピペットPとともに上下方向に移動可能な台座172が設けられ、この台座172上に検知部材173が取り付けられている。アーム部91bには回路基板174が立設され、この回路基板174に衝突検出用センサ170が取り付けられている。
【0037】
本実施の形態の衝突検出用センサ170は、投光部と受光部とを有する透過型センサからなる。検知部材173には、衝突検出用センサ170の投受光部の間に配置される遮光板173aが設けられている。遮光板173aは、正常時に衝突検出用センサ170を遮光し、衝突検出用センサ170をオフ状態とする。ピペットPが下降して障害物に衝突すると、アーム部91に対してピペットPが上昇し、台座172を介して遮光板173aも上昇するため、衝突検出用センサ170の遮光が解除される。これによって衝突検出用センサ170がオンとなった場合に、測定制御部140により、ピペットPが障害物に衝突したことが検出される。
【0038】
図1に示すように、試薬分注部90bは、試薬設置部60bに設置される試薬容器内のR2試薬を1次反応部80aの検体及びR1試薬が分注されたキュベット内に分注するための機能を有している。この試薬分注部90bは、アーム部92bを、軸92cを中心に回動させるとともに上下方向に移動させることが可能なように構成されている。また、アーム部92bの先端部には、試薬容器内のR2試薬の吸引及び吐出を行うためのピペットPが取り付けられている。試薬分注部90bは、試薬分注部90aと同様に、図5及び図6に示すような駆動部160及び衝突検出用センサ170を備えている。
【0039】
本実施の形態では、1次B/F分離部100aは、1次反応部80aの容器搬送部82によって搬送されたキュベット内の試料から未反応のR1試薬(不要成分)と磁性粒子とを分離するために設けられている。
未反応のR1試薬等が分離された1次B/F分離部100aのキュベットは、搬送機構96により2次反応部80bの2次反応テーブル83の保持部83aに搬送される。搬送機構96は、先端にキュベット把持部(図示せず)を有するアーム部96aを、軸96bを中心に回動させるとともに、上下方向に移動させることが可能なように構成されている。
【0040】
2次反応部80bは、1次反応部80aと同様の構成を有しており、2次反応テーブル83の保持部83aに保持されるキュベットを所定の期間(本実施の形態では、20秒)毎に所定の角度だけ回転移送するとともに、キュベット内の検体、R1試薬、R2試薬、R3試薬、R4試薬、及びR5試薬を攪拌するために設けられている。つまり、2次反応部80bは、キュベット内で標識抗体を有するR3試薬と検体中の抗原とを反応させるとともに、発光基質を有するR5試薬とR3試薬の標識抗体とを反応させるために設けられている。この2次反応部80bは、検体、R1試薬、R2試薬、R3試薬、R4試薬及びR5試薬が収容されるキュベット8を回転方向に搬送するための2次反応テーブル83と、キュベット内の検体、R1試薬、R2試薬、R3試薬、R4試薬及びR5試薬を攪拌するとともに、攪拌された検体等が収容されたキュベットを後述する2次B/F分離部100bに搬送する容器搬送部84とから構成されている。さらに、容器搬送部84は、2次B/F分離部100bにより処理されたキュベットを再び2次反応テーブル83の保持部83aに搬送する機能を有している。
【0041】
試薬分注部90cは、試薬設置部60aに設置される試薬容器202内のR3試薬を吸引するとともに、その吸引されたR3試薬を2次反応部80bの検体、R1試薬及びR2試薬が分注されたキュベット内に分注するための機能を有している。この試薬分注部90cは、アーム部93bを、軸93cを中心に回動させるとともに、上下方向に移動させることが可能なように構成されている。また、アーム部93bの先端部には、試薬容器内のR3試薬の吸引及び吐出を行うためのピペットPが取り付けられている。試薬分注部90cは、試薬分注部90aと同様に、図5及び図6に示すような駆動部160及び衝突検出用センサ170を備えている。
【0042】
2次B/F分離部100bは、1次B/F分離部100aと同様の構成を有しており、2次反応部80bの容器搬送部84によって搬送されたキュベット内の試料から未反応のR3試薬(不要成分)と磁性粒子とを分離するために設けられている。
R4試薬分注部90d及びR5試薬分注部90eは、図示しないノズル部を上下移動させ、それぞれR4試薬及びR5試薬を2次反応部80bの2次反応テーブル83に保持されたキュベット内に供給するために設けられている。
【0043】
検出部120は、所定の処理が行なわれた検体の抗原に結合する標識抗体と発光基質との反応過程で生じる発光量を光電子増倍管(Photo Multiplier Tube)で取得することにより、その検体に含まれる抗原の量を測定するために設けられている。この検出部120は、2次反応部80bの2次反応テーブル83の保持部83aに保持されるキュベットを当該検出部120に搬送するための搬送機構部121を備えている。
【0044】
本実施の形態の測定ユニット2は、以上に説明した構成のほか、図1に示すように試薬分注部90a〜90cのピペットPを洗浄するピペット洗浄部220と、ピペットPの先端の位置を確認するための位置確認用部材210とを備えている。以下、試薬分注部90a用のピペット洗浄部220及び位置確認用部材210を例に説明するが、試薬分注部90b、90c用のピペット洗浄部220及び位置確認用部材210の構成も同様であるため、これらの説明は省略する。
【0045】
(ピペット洗浄部の構成)
図7に示すように、ピペット洗浄部220は洗浄容器221を備え、この洗浄容器221には、ピペットPを挿入するための洗浄孔222と、この洗浄孔222内に洗浄液を吐出するための洗浄ノズル223とが設けられている。洗浄孔222は洗浄容器221の上端で開口し、この開口からピペットPを挿入させることが可能である。洗浄ノズル223は、洗浄孔222に対して斜め上方から洗浄液を吐出し、洗浄孔222に挿入されたピペットPに洗浄液を吹き付けることによって、ピペットPを洗浄するように構成されている。
【0046】
図1に示すように、ピペット洗浄部220は、平面視において、試薬分注部90aのピペットPの移動軌跡(軸91cを中心とする回動軌跡;矢印参照)上に配置されている。また、ピペット洗浄部220は、試薬分注部90aのアーム部91bの原点位置(例えば、図1に示すアーム部91bの位置)から水平方向及び下方向に所定の距離だけ離れた位置に配置されている。したがって、試薬分注部90aのアーム部91bを原点位置からピペット洗浄部220の上方位置まで所定の距離だけ回動させ、さらにアーム部91bを下降させることによって、洗浄容器221の洗浄孔222にピペットPを挿入することが可能である。
【0047】
(位置確認用部材の構成)
位置確認用部材210は、試薬分注部90aのピペットPを所定の位置に移動させたときに、ピペットPが当該所定位置に正確に配置されているかを確認するために用いられる。図5に示すように、位置確認用部材210は、上下方向に貫通する孔(空間部)211を有するブロック状に形成されている。この孔211は、ピペットPの外径よりもやや(2mm程度)大きく、ピペットPを僅かな隙間(半径で約1mmの隙間)をもって挿入することができる直径に形成されている。なお、孔211は、位置確認用部材210を貫通しない有底の孔であってもよい。また、孔211は、図9に示すように、上端部がピペットPの外径よりもやや大きく、ピペットPを僅かな隙間(半径で約1mmの隙間)をもって挿入することができる直径に形成されており、それ以外の部分が、ピペットPを十分な隙間をもって挿入することができる直径に形成されていてもよい。このような形状とすることにより、位置確認用部材210の位置確認の精度を保持しつつ、孔211の内壁面に付着した試薬や洗浄液によってピペットPが汚染される確率を低減させることができる。
【0048】
図1に示すように、位置確認用部材210は、平面視において、試薬分注部90aにおけるピペットPの移動軌跡(軸91cを中心とする回動軌跡;矢印参照)上に配置されている。また、位置確認用部材210は、試薬分注部90aのアーム部91bの原点位置(例えば、図1に示すアーム部91bの位置)から水平方向及び下方向に所定の距離だけ離れた位置に配置されている。したがって、アーム部91bを原点位置から位置確認用部材210の上方位置まで所定の距離だけ回動させ、さらにアーム部91bを下降させることによって、位置確認用部材210の孔211にピペットPの先端を挿入することが可能となっている。
【0049】
ピペットPは、測定ユニット2内においてユーザが接触する可能性がある場所に配置されている。そのため、ユーザが誤ってピペットPに接触し、ピペットPが曲がってしまう場合がある。また、試薬分注部90aの駆動部160は、長期使用によるベルトの延び等によって、所定の位置でピペットPの先端を正確に停止させることができなくなる場合がある。このような異常(ピペットPの形状異常、動作異常)が発生すると、位置確認用部材210の孔211にピペットPの先端を挿入することができなくなり、図5に2点鎖線で示すように、ピペットPの先端が位置確認用部材210に衝突する。
【0050】
前述したように、本実施の形態のアーム部91bには衝突検出用センサ170が設けられているので、ピペットPの先端が位置確認用部材210に衝突すると、そのことを測定制御部140によって検出することが可能である。言い換えると、測定制御部140によって、衝突検出用センサ170の出力に基づいて、ピペットPの先端が所定位置(孔211内)に有るか否かを検出することが可能となっている。本実施の形態では、位置確認用部材210や衝突検出用センサ170によって、ピペットPの先端が所定位置に有るか否かを確認するための位置確認手段が構成されている。
【0051】
[制御装置の構成]
制御装置400は、パーソナルコンピュータ401(PC)等からなり、図1に示されるように、制御部400aと、表示部400bと、キーボードやマウス等の入力部(入力手段)400cとを含んでいる。制御部400aは、測定ユニット2における各機構の動作制御を行うとともに、測定ユニット2で得られた検体の光学的な情報を分析するための機能を有している。この制御部400aは、CPU、ROM、RAM等からなる。また、表示部400bは、制御部400aで得られた分析結果等の情報等を表示するために用いられる。
【0052】
次に、制御装置400の各構成を説明する。制御部400aは、図3に示されるように、CPU401aと、ROM401b,RAM401c及びハードディスク401d等からなる記憶部と、読出装置401eと、入出力インタフェース401fと、通信インタフェース401gと、画像出力インタフェース401hとから主として構成されている。
CPU401a、ROM401b、RAM401c、ハードディスク401d、読出装置401e、入出力インタフェース401f、通信インタフェース401g、及び画像出力インタフェース401hは、バス401iによって接続されている。
【0053】
CPU401aは、ROM401bに記憶されているコンピュータプログラム及びRAM401cにロードされたコンピュータプログラムを実行することが可能である。そして、後述するようなアプリケーションプログラム404aをCPU401aが実行することにより、コンピュータ401が制御装置400として機能する。
ROM401bは、マスクROM、PROM、EPROM、EEPROM等によって構成されており、CPU401aに実行されるコンピュータプログラム及びこれに用いるデータ等が記録されている。
【0054】
RAM401cは、SRAM又はDRAM等によって構成されている。RAM401cは、ROM401b及びハードディスク401dに記録されているコンピュータプログラムの読み出しに用いられる。また、これらのコンピュータプログラムを実行するときに、CPU401aの作業領域として利用される。
【0055】
ハードディスク401dは、オペレーティングシステム及びアプリケーションプログラム等、CPU401aに実行させるための種々のコンピュータプログラム404a及びそのコンピュータプログラムの実行に用いるデータがインストールされている。例えば、測定オーダを登録するためのアプリケーションプログラムや、測定ユニット2の動作を制御するためのアプリケーションプログラムもこのハードディスク401dにインストールされている。
【0056】
読出装置401eは、フレキシブルディスクドライブ、CD−ROMドライブ、又はDVD−ROMドライブ等によって構成されており、可搬型記録媒体404に記録されたコンピュータプログラム又はデータを読み出すことができる。また、可搬型記録媒体404には、本実施の形態におけるアプリケーションプログラム404aが格納されており、コンピュータ401が、その可搬型記録媒体404からアプリケーションプログラム404aを読み出し、そのアプリケーションプログラム404aをハードディスク401dにインストールすることが可能である。
【0057】
なお、前記アプリケーションプログラム404aは、可搬型記録媒体404によって提供されるのみならず、電気通信回線(有線、無線を問わない)によってコンピュータ401と通信可能に接続された外部の機器から前記電気通信回線を通じて提供することも可能である。例えば、前記アプリケーションプログラム404aがインターネット上のサーバコンピュータのハードディスク内に格納されており、このサーバコンピュータにコンピュータ401がアクセスして、そのアプリケーションプログラム404aをダウンロードし、これをハードディスク401dにインストールすることも可能である。
【0058】
ハードディスク401dには、例えば、米マイクロソフト社が製造販売するWindows(登録商標)等のグラフィカルユーザインタフェース環境を提供するオペレーティングシステムがインストールされている。以下の説明においては、本実施の形態におけるアプリケーションプログラム404aは前記オペレーティングシステム上で動作するものとしている。
【0059】
入出力インタフェース401fは、例えば、USB、IEEE1394、RS−232C等のシリアルインタフェース、SCSI、IDE、IEEE1284等のパラレルインタフェース、及びD/A変換器、A/D変換器等からなるアナログインタフェース等から構成されている。入出力インタフェース401fには、キーボード400cが接続されており、ユーザがそのキーボード400cを使用することにより、コンピュータ401にデータを入力することが可能である。
【0060】
通信インタフェース401gは、例えば、Ethernet(登録商標)インタフェースである。コンピュータ401は、その通信インタフェース401gにより、所定の通信プロトコルを使用して測定ユニット2との間でデータの送受信が可能である。
画像出力インタフェース401hは、LCD又はCRT等で構成された表示部400bに接続されており、CPU401aから与えられた画像データに応じた映像信号を表示部400bに出力するようになっている。表示部400bは、入力された映像信号にしたがって、画像(画面)を表示する。
【0061】
[免疫分析装置による分析処理の全体プロセス]
免疫分析装置1による分析処理の全体のフローを図4に示す。以下、免疫分析装置1による分析処理の全体を説明する。なお、以下に説明する処理は、制御装置400の制御部400a又は測定ユニット2の測定制御部140によって制御される処理である。
【0062】
まず、免疫分析装置1の電源が投入されると、測定制御部140の初期化が行われる(ステップS1)。この初期化動作では、プログラムの初期化や免疫分析装置1の駆動部分の原点位置復帰などが行われる。
一方、前記免疫分析装置1に通信可能に接続された制御装置400の電源が投入されると、当該制御装置400の制御部400aの初期化が行われる(ステップS101)。この初期化動作では、プログラムの初期化などが行われる。
測定制御部140及び制御装置400の初期化が終了すると、免疫分析装置1は測定(分析)開始可能な状態(スタンバイ状態)となる。
【0063】
ついでステップS102において、免疫分析装置1を用いて分析を行う検体のオーダ登録が行われる(ステップS102)。このオーダ登録は、例えば、ユーザが検体番号や測定項目(分析項目)などの情報をキーボード(入力手段)400cから入力し、内容確認後、ユーザがオーダ登録の指示ボタンをクリックすることで行われる。制御部400aにより実行されたオーダ登録は、ハードディスク401dの記憶領域に記憶される。
【0064】
ついでステップS103において、制御部400aによって、測定開始の指示が受け付けられたか否かが判断される。図8は、スタンバイ状態で制御装置400の表示部400bに表示されるメニュー画面301を示す図であり、このメニュー画面301には、タイトルバー301a、メニューバー301b、ツールバー301c、及び主表示部301d等が表示されている。ツールバー301c及び主表示部301dには「測定開始」ボタン303,302が設けられており、ユーザがこの「測定開始」ボタン303,302を押す(クリックする)ことによって、免疫分析装置1に対して測定開始の指示を与えることができる。
【0065】
制御部400aは、測定開始の指示が受け付けられたと判断した場合(Yes)にはステップS104へ処理を進め、測定開始の指示が受け付けられなかったと判断した場合(No)にはステップS119へ処理を進める。そして、ステップS104において、制御部400aは、測定開始信号を測定制御部140へ送信する。
【0066】
ついでステップS2において、測定制御部140によって、測定開始信号の受信が行われたか否かが判断される。測定制御部140は、測定開始信号の受信が行われたと判断した場合(Yes)にはステップS3へ処理を進め、測定開始信号の受信が行われなかったと判断した場合(No)にはステップS23へ処理を進める。
ステップS3において、測定制御部140は、試薬分注部90a〜90cのピペットPの初期化動作、すなわち、ピペットPをその原点位置まで戻す動作を行う。その後、ステップS4へ処理を進める。
ステップS4において、試薬分注部90a〜90cのピペットPの洗浄が行われる。具体的には、図7に示すように試薬分注部90a〜90cのピペットPが洗浄容器221に挿入され、洗浄ノズル222から吐出された洗浄液がピペットPに吹き付けられる。
【0067】
ついでステップS5において、試薬分注部90a〜90cのピペットPの移動が行われる。具体的には、図5に示すように、駆動部160によってピペットPが位置確認用部材210の上方位置まで移動させられ、その後、ピペットPを下降させることによって、ピペットPの先端が位置確認用部材210の孔211に挿入される。これにより、ピペットPの先端は、確認位置Qに配置される。
【0068】
ステップS6において、ピペットPの先端が位置確認用部材210の孔211に挿入された際に、測定制御部140は、衝突検出用センサ170の出力に基づいて、ピペットPと位置確認用部材210とが衝突したか否かを判断することにより、ピペットPの先端が確認位置Qまで到達したことを確認する。具体的には、ピペットPの先端が位置確認用部材210の孔211に挿入された際に、衝突検出用センサ170が何も検知せず出力に変化が無かった場合(すなわち、衝突検出用センサ170が遮光板173aによって遮光されたままの状態である場合)に、ピペットPの先端が確認位置Qまで到達したと判断し、衝突検出用センサ170が何も検知せず出力に変化があった場合(すなわち、衝突検出用センサ170の遮光板173aによる遮光が解除され、衝突検出用センサ170がオンとなった場合)に、ピペットPと位置確認用部材210とが衝突し、ピペットPの先端が確認位置Qまで到達しなかった判断する。測定制御部140が、位置確認用部材210の孔211内に位置する確認位置QまでピペットPの先端が到達したと判断した場合(Yes)にはステップS9へ処理を進め、位置確認用部材210に孔211内に位置する確認位置QまでピペットPの先端が挿入されていないと判断した場合(No)にはステップS7へ処理を進める。
【0069】
ステップS7において、測定制御部140によって、ピペットPの位置確認エラーの信号が制御装置400に送信され、ステップS8へ処理を進める。
次に、ステップS8において、測定制御部140は、ピペットPを上死点まで移動させた後、ピペットPおよび装置全体の動作を中断させる。その後、ステップS23へ処理を進める。
ステップS105において、制御部400aによって、エラー信号の受信が行われたか否かが判断される。制御部400aは、エラー信号の受信が行われたと判断した場合(Yes)にはステップS106へ処理を進め、エラー信号の受信が行われなかったと判断した場合(No)にはステップS109へ処理を進める。
【0070】
ステップS106において、制御部400aによって、ピペットPの位置確認エラー表示が表示部400bに行われる。このエラー表示は、例えば、ピペットPが曲がっていることやピペットPの移動に不具合があることの表示、新しいピペットPへの交換を促す表示とされる。ユーザは、このエラー表示を見ることによってピペットPの形状異常や動作異常を認識し、ピペットPを交換する等の対処を行うことが可能である。また、このエラー表示は、装置状態をスタンバイ状態に戻すための確認ボタンと、ピペットの位置調整を実行するためのピペット位置調整ボタンとを含む。
【0071】
次に、ステップS107において、制御部400aは、確認ボタンが選択されたか、ピペット位置調整ボタンが選択されたかを判断し、確認ボタンが選択された場合には、処理をステップS119に進めるとともに、装置をスタンバイ状態に戻す。ステップS107においてピペット位置調整ボタンが選択された場合には、ステップS108において、ピペットの位置を調整する処理を実行する。
【0072】
次に、ステップS9において、検体搬送部10により、検体を収容した複数の試験管3が載置されたラック4が検体分注アーム50の吸引位置に対応する位置まで搬送される。前記ラック4には、当該ラック4を特定するための情報(ラック番号)が記録されたバーコードが付されており、このラック4を所定の位置まで搬送する搬送路に設けられたバーコードリーダ150(図3参照)によって、前記バーコードが読み取られる(ステップS10)。読み取られたラック番号は、ステップS11において、測定制御部140によって制御装置400側に送信される。
【0073】
ついでステップS109において、制御部400aによって、ラック番号の受信が行われたか否かが判断される。制御部400aが、ラック番号の受信が行われたと判断した場合(Yes)にはステップS110へ処理を進める。
【0074】
ついでステップS110において、制御部400aによって、オーダページの検索が行われる。すなわち、制御部400aは、ハードディスク401dの記憶領域に記憶されているオーダ情報から、ステップS109において受信したラック番号に係るオーダ情報を検索する。
【0075】
前記試験管3には、前記ラック4と同様に当該試験管3内の検体を特定するための情報(検体番号)が記録されたバーコードが付されており、試験管3を載置したラック4を所定の位置まで搬送する搬送路に設けられたバーコードリーダ150(図3参照)によって、前記バーコードが読み取られる(ステップS12)。測定制御部140は、ステップS13において、読み取られた検体番号を制御装置400側に送信する。なお、試験管3とラック4のバーコードは、別々のバーコードリーダで読み取るようにしてもよいし、共通のバーコードリーダで読み取るようにしてもよい。
【0076】
ついでステップS111において、制御部400aによって、検体番号の受信が行われたか否かが判断される。制御部400aが、検体番号の受信が行われたと判断した場合(Yes)にはステップS112へ処理を進める。
【0077】
ついでステップS112において、制御部400aによってオーダの検索が行われる。すなわち、制御部400aは、ステップS110において検索された、特定のラック番号に係るオーダ情報から、ステップS111において受信した検体番号に係るオーダ情報を検索する。そして、ステップS113において、制御部400aは、オーダの指示を測定制御部140へ送信する。
【0078】
ついでステップS14において、測定制御部140によって、オーダ指示の受信が行われたか否かが判断される。測定制御部140が、オーダ指示の受信が行われたと判断した場合(Yes)にはステップS15へ処理を進める。
【0079】
ついでステップS15において、オーダされた項目についての測定が行われる。具体的には、検体分注部50によって試験管3内の検体がキュベットに分注され、ついで、試薬分注部90a等によって所定の試薬がキュベットに分注され(ステップS16)、B/F分離部100a,100b等において所定の処理が行われることによって、試薬と試料とを混和して調製した測定試料が作成される。試薬分注後のピペットPは、ピペット洗浄部220によって洗浄される(ステップS17)。その後、検出部120によって、測定試料に対して所定の測定が行われ(ステップS18)、その測定結果が、測定制御部140によって制御装置400側に送信される(ステップS19)。
【0080】
ついでステップS114において、制御部400aによって、測定結果の受信が行われたか否かが判断される。制御部400aが、測定結果の受信が行われたと判断した場合(Yes)にはステップS115へ処理を進める。
【0081】
ステップS115では、測定制御部140側から送信された測定結果の解析処理が行われる。すなわち、制御部400aは、送信された測定結果と、予め標準試料を用いて作成され、前記ハードディスク401dに記憶されている検量線とから、測定対象の抗原の濃度を換算し、その結果(分析結果)を記憶する。また、制御部400aは、表示部400bに分析結果の出力を行う(ステップS116)。
【0082】
ついでステップS117において、制御部400aによって、ラック4に保持されているすべての試験管3中の検体について測定が行われたか否かが判断される。制御部400aは、ラック4に保持されているすべての試験管3中の検体について測定が行われたと判断した場合(Yes)にはステップS118へ処理を進め、ラック4に保持されているすべての試験管3中の検体については測定が行われていないと判断した場合(No)にはステップS111へ処理を戻す。
【0083】
ついでステップS118において、制御部400aによって、すべてのラック4について測定が行われたか否かが判断される。制御部400aは、すべてのラック4について測定が行われたと判断した場合(Yes)にはステップS119へ処理を進め、すべてのラック4については測定が行われていないと判断した場合(No)にはステップS105へ処理を戻す。
【0084】
ついでステップS119において、制御部400aによって、制御装置400をシャットダウンする指示を受け付けているか否かが判断される。制御部400aは、シャットダウンする指示を受け付けていると判断した場合(Yes)にはステップS120へ処理を進め、シャットダウンする指示を受け付けていないと判断した場合(No)にはステップS102へ処理を戻す。
【0085】
ついでステップS120において、シャットダウン信号が制御部400aから測定制御部140へ送信される。
そして、ステップS121において、制御部400aにより、制御装置400のシャットダウンが行われ、処理が終了する。
【0086】
また、ステップS20において、測定制御部140によって、ラック4に保持されているすべての試験管3中の検体について測定が行われたか否かが判断される。測定制御部140は、ラック4に保持されているすべての試験管3中の検体について測定が行われたと判断した場合(Yes)にはステップS22へ処理を進め、ラック4に保持されているすべての試験管3中の検体については測定が行われていないと判断した場合(No)には、ラック4を所定距離(次に測定される検体を収容する試験管が被吸引位置に到達する距離)だけ搬送するように検体搬送部10を制御し(ステップS21)、ステップS12へ処理を戻す。
【0087】
ついでステップS22において、測定制御部140によって、すべてのラック4について測定が行われたか否かが判断される。測定制御部140は、すべてのラック4について測定が行われたと判断した場合(Yes)にはステップS23へ処理を進め、すべてのラック4については測定が行われていないと判断した場合(No)にはステップS4へ処理を戻す。
【0088】
ついでステップS23において、測定制御部140によって、シャットダウン信号の受信が行われたか否かが判断される。測定制御部140は、シャットダウン信号の受信が行われたと判断した場合(Yes)にはステップS24へ処理を進め、シャットダウン信号の受信が行われていないと判断した場合(Yes)にはステップS2へ処理を戻す。
そして、ステップS24において、測定制御部140によって、免疫分析装置1のシャットダウンが行われ、処理が終了する。
【0089】
以上に説明した免疫分析装置1の全体プロセスにおいて、試薬分注部90a〜90cのピペットPの位置確認動作(ステップS6)は、制御装置400や測定ユニット2の初期化(ステップS1,S101)が行われた後、測定開始可能な状態になってから、所定の動作シーケンスに従って自動的に行われる。そのため、ユーザがピペットPの位置確認の操作を意図的に行う必要が無く、ピペットPの位置確認を行うタイミングをユーザ自身が管理する必要がない。従って、ユーザの負担を軽減することができる。
【0090】
また、試薬分注部90a〜90cのピペットPの位置確認動作は、制御装置400において測定開始の指示が受け付けられた後に行われている。したがって、測定(分析)の度にピペットPの位置確認が必ず行われることになる。そのため、測定中、ピペットPの異常(形状異常、動作異常)によって、ピペットPが試薬容器等に衝突して破損したり、ピペットPの洗浄が不十分となることにより、測定結果の信頼性が低下したりするのを防止することができる。
【0091】
試薬分注部90a〜90cのピペットPの位置確認動作は、位置確認用部材210の孔211内にピペットPを挿入することによって行われ、ピペットPが正常である場合には位置確認用部材210に接触することがほとんどないので、ピペットPや位置確認部材210の汚染を防止することができる。
また、試薬分注部90a〜90cのピペットPの位置確認動作は、ピペットPが洗浄された直後(ステップS4〜S6)に行われるので、位置確認用部材210へのピペットPの接触や接近で、位置確認用部材210が汚染されてしまうのを防止することができる。
【0092】
試薬分注部90a〜90cのピペットPの位置確認動作は、検体分注部50によって検体が分注される前に行われるので、ピペットPの異常が判明したことによって測定が中断されてしまっても、検体を無駄にしてしまうことはない。
【0093】
本発明は前述の実施の形態に限定されることなく適宜設計変更可能である。
例えば、前述の実施の形態では、ピペットPの位置確認用のセンサとして、衝突検出用センサ170が用いられているが、位置確認専用のセンサを別途設けてもよい。例えば、位置確認用部材210として、投光部と受光部とを有する透過型センサを用い、投光部と受光部との間(空間部)にピペットPの先端が挿入されたか否かを当該透過型センサによって検出するように構成してもよい。
また、前述の実施の形態では、測定制御部140は、ピペットPの先端の位置を確認するように構成されているが、ピペットPの中間部の位置や、ピペットから吐出される液体の位置などを確認することによって、ピペットの位置を確認するように構成してもよい。
【0094】
試薬分注部90a〜90cのピペットPの位置確認動作は、免疫分析装置1がスタンバイ状態にあるときに所定間隔毎(例えば、30分毎)に行うようにしてもよい。この場合、スタンバイ状態の間にユーザがピペットPに触れることによってピペットPが曲がってしまったとしても、そのことを測定が開始される前に検出することが可能となる。したがって、ピペットPが曲がったまま測定が開始され、測定中にピペットPが試薬容器等に接触して破損してしまったり、ピペットPの洗浄が不十分となって測定結果の信頼性が低下してしまったりすることを防止することができる。
【0095】
前述の実施の形態に係る免疫分析装置1は、ピペットPの位置確認動作を行うために、位置確認専用の位置確認用部材210を備えているが、試薬容器201,202や洗浄容器221を位置確認用部材として用いることも可能である。この場合、試薬容器201,202の開口や洗浄容器221の開口を孔(空間部)とし、当該孔にピペットPが挿入されるか否かによって、ピペットPの先端の位置を確認することができる。ただし、前述の実施の形態のように、位置確認専用の位置確認用部材210を用いた場合、自由に孔211の直径を定めることができるため、より高精度なピペットPの位置確認動作を行うことが可能となる。
【0096】
前述の実施の形態に係る免疫分析装置1は、試薬分注部90a〜90cのピペットPの位置確認動作を行うように構成されているが、検体分注部50のピペットの位置確認を行うように構成されていてもよい。
本発明は、免疫分析装置に限らず、血液凝固測定装置、多項目血球分析装置、尿中有形成分分析装置、遺伝子増幅測定装置等の他の分析装置にも適用可能である。
【図面の簡単な説明】
【0097】
【図1】本発明の一実施の形態に係る免疫分析装置(検体分析装置)の全体構成を示す平面説明図である。
【図2】図1に示される免疫分析装置の測定ユニットの構成を示すブロック図である。
【図3】図1に示される免疫分析装置の測定制御部及び制御装置の構成を示すブロック図である。
【図4】図1に示される免疫分析装置の分析処理全体のフローを示す図である。
【図5】図1に示される免疫分析装置の試薬分注部の構成を概略的に示す側面図である。
【図6】図1に示される免疫分析装置のアーム部及び衝突検出用センサを示す斜視図である。
【図7】図1に示される免疫分析装置のピペット洗浄部を示す断面図である。
【図8】図1に示される免疫分析装置の表示部に表示されるメニュー画面を示す図である。
【図9】図5に示される位置確認用部材の一例を示す図である。
【符号の説明】
【0098】
1 免疫分析装置
2 測定ユニット
90a〜90e 試薬分注部
140 測定制御部
160 駆動部
170 衝突検出用センサ(検出部)
210 位置確認用部材
211 孔
400 制御装置
400a 制御部
【特許請求の範囲】
【請求項1】
検体と試薬とを混和して検体を分析する検体分析装置であって、
試薬又は検体を分注するためのピペットと、
前記ピペットを移動させるピペット移動機構と、
所定位置に配置された位置確認部と、
前記ピペット移動機構により前記ピペットを前記位置確認部に移動させ、前記ピペットが前記所定位置に配置されたことを確認する位置確認処理を実行する位置確認実行手段と、を備えていることを特徴とする検体分析装置。
【請求項2】
前記位置確認処理は、前記ピペットの先端部が前記所定位置に配置されるように前記ピペットを移動させ、移動させた前記ピペットの先端部が前記所定位置に配置されたか否かを判定することによって前記ピペットが前記所定位置に配置されたことを確認する処理である、請求項1記載の検体分析装置。
【請求項3】
前記位置確認実行手段が、自動的に、前記位置確認処理を実行するように構成された請求項1または2に記載の検体分析装置。
【請求項4】
前記検体分析装置による分析開始の指示を受け付ける分析開始指示受付手段をさらに備え、
前記位置確認実行手段が、前記分析開始指示受付手段によって前記分析開始の指示が受け付けられたときに、前記位置確認処理を実行するよう構成された請求項1〜3のいずれか1つに記載の検体分析装置。
【請求項5】
前記分析開始指示受付手段は、複数の検体についての1つの分析開始の指示を受け付け、
前記位置確認実行手段が、前記分析開始指示受付手段によって前記複数の検体についての1つの分析開始の指示が受け付けられた後、前記検体に対して最初の処理が行われる前に、前記位置確認処理を実行する請求項4に記載の検体分析装置。
【請求項6】
前記位置確認実行手段が、前記検体分析装置が分析開始可能な状態で待機しているときに、所定の時間毎に前記位置確認処理を実行する請求項1〜5のいずれか1つに記載の検体分析装置。
【請求項7】
前記位置確認部は、前記ピペットの先端部が挿入可能な空間を有する位置確認用部材を備え、
前記分析装置は、前記ピペットが前記位置確認用部材に衝突したか否かを検知するためのセンサをさらに備え、
前記位置確認実行手段は、前記センサの出力に基づいて、前記ピペットが前記所定位置に配置されたか否かを確認する、請求項1〜6のいずれか1つに記載の検体分析装置。
【請求項8】
前記位置確認実行手段が、前記ピペットが前記所定位置に配置されたことを確認できなかった場合に、前記ピペットの形状または移動に不具合がある旨を通知する通知手段をさらに備える請求項1〜7のいずれか1つに記載の検体分析装置。
【請求項9】
前記位置確認実行手段が、前記ピペットが前記所定位置に配置されたことを確認できなかった場合に、前記ピペットの動作を停止させるピペット動作停止手段をさらに備える請求項1〜8のいずれか1つに記載の検体分析装置。
【請求項1】
検体と試薬とを混和して検体を分析する検体分析装置であって、
試薬又は検体を分注するためのピペットと、
前記ピペットを移動させるピペット移動機構と、
所定位置に配置された位置確認部と、
前記ピペット移動機構により前記ピペットを前記位置確認部に移動させ、前記ピペットが前記所定位置に配置されたことを確認する位置確認処理を実行する位置確認実行手段と、を備えていることを特徴とする検体分析装置。
【請求項2】
前記位置確認処理は、前記ピペットの先端部が前記所定位置に配置されるように前記ピペットを移動させ、移動させた前記ピペットの先端部が前記所定位置に配置されたか否かを判定することによって前記ピペットが前記所定位置に配置されたことを確認する処理である、請求項1記載の検体分析装置。
【請求項3】
前記位置確認実行手段が、自動的に、前記位置確認処理を実行するように構成された請求項1または2に記載の検体分析装置。
【請求項4】
前記検体分析装置による分析開始の指示を受け付ける分析開始指示受付手段をさらに備え、
前記位置確認実行手段が、前記分析開始指示受付手段によって前記分析開始の指示が受け付けられたときに、前記位置確認処理を実行するよう構成された請求項1〜3のいずれか1つに記載の検体分析装置。
【請求項5】
前記分析開始指示受付手段は、複数の検体についての1つの分析開始の指示を受け付け、
前記位置確認実行手段が、前記分析開始指示受付手段によって前記複数の検体についての1つの分析開始の指示が受け付けられた後、前記検体に対して最初の処理が行われる前に、前記位置確認処理を実行する請求項4に記載の検体分析装置。
【請求項6】
前記位置確認実行手段が、前記検体分析装置が分析開始可能な状態で待機しているときに、所定の時間毎に前記位置確認処理を実行する請求項1〜5のいずれか1つに記載の検体分析装置。
【請求項7】
前記位置確認部は、前記ピペットの先端部が挿入可能な空間を有する位置確認用部材を備え、
前記分析装置は、前記ピペットが前記位置確認用部材に衝突したか否かを検知するためのセンサをさらに備え、
前記位置確認実行手段は、前記センサの出力に基づいて、前記ピペットが前記所定位置に配置されたか否かを確認する、請求項1〜6のいずれか1つに記載の検体分析装置。
【請求項8】
前記位置確認実行手段が、前記ピペットが前記所定位置に配置されたことを確認できなかった場合に、前記ピペットの形状または移動に不具合がある旨を通知する通知手段をさらに備える請求項1〜7のいずれか1つに記載の検体分析装置。
【請求項9】
前記位置確認実行手段が、前記ピペットが前記所定位置に配置されたことを確認できなかった場合に、前記ピペットの動作を停止させるピペット動作停止手段をさらに備える請求項1〜8のいずれか1つに記載の検体分析装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−210373(P2009−210373A)
【公開日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願番号】特願2008−52954(P2008−52954)
【出願日】平成20年3月4日(2008.3.4)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
【公開日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願日】平成20年3月4日(2008.3.4)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
[ Back to top ]