
検体容器判別装置
【課題】採血管等の検体容器の種別を簡便に判別できるようにする。
【解決手段】ラック10には採血管12が保持され、それに対して上方から光ビームを走査することにより、距離算出部40において高さプロファイルが取得される。解析部42は高さプロファイルに対して波形解析を実行する。この場合においては、複数の波形特徴量が求められる。それらの波形特徴量から、採血管における本体の種別と栓の種別とが判別される。更に、栓の有無及び採血管自体の有無までも判別可能である。
【解決手段】ラック10には採血管12が保持され、それに対して上方から光ビームを走査することにより、距離算出部40において高さプロファイルが取得される。解析部42は高さプロファイルに対して波形解析を実行する。この場合においては、複数の波形特徴量が求められる。それらの波形特徴量から、採血管における本体の種別と栓の種別とが判別される。更に、栓の有無及び採血管自体の有無までも判別可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検体容器判別装置に関し、特に、採血管等の検体容器の種別を非接触で判別する装置に関する。
【背景技術】
【0002】
検体前処理装置は、遠心分離ユニット、開栓ユニット、分注ユニット、閉栓ユニット等によって構成される。検体前処理装置においては、複数の採血管を保持したラックが搬送される。採血管には栓が設けられ、その栓の種別としてはゴム栓、シール栓等があげられる。同じゴム栓であっても、形、色等が異なる様々なものがあり、これはシール栓についても同様である。採血管の本体についても幾つかの種類がある。典型的には、長さが異なる複数の本体が存在する。
【0003】
上記の開栓ユニットにおいては、栓の種類に応じて、場合によっては更に本体の種類に応じて、その動作条件を事前に設定する必要がある。例えば、ゴム栓及びシール栓等の種類に応じて、専用の開栓機構へ採血管を投入し、そこで対象採血管に適合した動作条件をもって開栓作業を行わせる必要がある。このため、栓の種類及び本体の種類を開栓に先立って計測しておくことが望まれる。
【0004】
特許文献1には、栓の有無や高さを検出するセンサを備えた検体処理システムが開示されている。特許文献2には、液面の高さを検出するセンサを備えた装置が記載されている。当該センサの出力としてスキャン位置に応じた反射光データが得られている(図5参照)。但し、それは栓を検出するものではない。
【0005】
【特許文献1】特開2007−85967号公報
【特許文献2】特開2005−221392号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明の目的は、検体容器の種別を簡便に判別できるようにすることにある。
【0007】
本発明の他の目的は、検体容器における栓の種別及び本体の種別の双方を判別できるようにすることにある。
【0008】
本発明の他の目的は、検体容器としての採血管固有の形態に適合した判別方法の適用により採血管の種別を簡便かつ正確に判別できるようにすることにある。
【課題を解決するための手段】
【0009】
本発明は、ラックに保持された検体容器に対してその上方から光ビームの走査を行うことにより、前記検体容器について一次元の高さプロファイルを取得する計測手段と、前記検体容器について取得された高さプロファイルを解析することにより、前記検体容器の種別を判別する判別手段と、を含むことを特徴とする検体容器判別装置に関する。
【0010】
上記構成によれば、採血管等の検体容器に対して光ビームを相対的に移動させて一次元の高さプロファイルが取得される。この場合、光ビームそれ自体を走査するようにしてもよいが、それを固定してラック搬送により検体容器を前方へ送って結果として光ビームが検体容器に対して相対的に走査されるようにしてもよい。一次元の高さプロファイルは、連続的なサンプリングデータによって構成されてもよいし、離散的なサンプリングデータにより構成されてもよい。
【0011】
ラック上に複数の検体容器が保持され、それらの全体に対する連続的な光ビーム走査によって全体的な高さプロファイルが取得される場合、波形解析に先立って、全体的な高さプロファイルを個々の検体容器ごとの高さプロファイル(部分波形)に分割する処理を施すのが望ましい。ラックの位置が既知であれば、ラック上における各検体容器の存在範囲は容易に特定できる。勿論、全体的な高さプロファイルにおける検体容器間の隙間を特定することにより(及び両端の検体容器の外側の落ち込みを特定することにより)、各検体容器ごとの高さプロファイルを切り出すことも可能である。
【0012】
各検体容器についての高さプロファイルの波形形態は検体容器の上部形状を反映したものとなっているので、高さプロファイルの波形を解析することにより、検体容器の種別を特定することが可能となる。判別対象が採血管であれば、基本的に、その本体は中心軸を中心として回転対称形状を有し、同様に、その栓(ゴム栓、アルミシール栓、等)も中心軸を中心として回転対称形状を有しているから、採血管がどのような回転角度にあっても、その中心軸(又はその付近)を通過する一次元の高さプロファイルを取得すれば、そこから採血管の種別を判別することが可能となる。特に、栓の種別に応じて上部形態が顕著に異なるから、その異なる部分が明らかになるような少なくととも1つの(望ましくは複数の)波形特徴量を演算するのが望ましい。なお、アルミシール栓の中には鍔状のタブが付いているものもあるが、その部分を波形解析対象から除外してもよく、また、タブが折れ曲がっていて計測に障害が生じるならばエラー処理にて対処することも可能である。上記構成に加えて、栓の色等の情報を併せて考慮して検体容器の種別を判別するようにしてもよい。
【0013】
上記構成では、光ビームが利用されているので、非接触での種別判定が可能となる。よって、汚染の問題を回避できる。検体容器がラック上において若干傾斜していることも考えられる。光ビームの走査方向への傾斜に対しては、高さプロファイル上において検体容器の基準座標を見出し、それを原点として計測座標を定めるのが望ましい。一方、光ビームの走査方向と直交する方向への傾斜に対しては、それが若干であって、検体容器の上部形態を反映した一次元の高さプロファイルが取得できる限りにおいては上記構成をそのまま使うことが可能である。一方、有効な高さプロファイルを得られないような場合には、エラー処理で対処してもよいし、光ビームのスキャン経路を複数個並行に設定して有効な高さプロファイルを選択的に利用するようにしてもよい。
【0014】
望ましくは、前記判別手段は、少なくとも、前記各検体容器に装着された栓の種別を判別する。採血管については、各種のゴム栓及び各種のシール栓が存在し、それらが混在して流されても、上記構成によれば、個々の採血管について栓の種別を個別的に判定できるから、後工程において有用な情報を取得できる。あるいは、データベース上に登録された種別に対して実測した種別を突き合わせること等が可能となる。
【0015】
望ましくは、前記判別手段は、更に前記検体容器の本体の種別を判別し、前記判別手段により、前記検体容器の種別として、前記本体の種別と栓の種別との組み合わせが判別される。この構成によれば、栓の種別のみならず、本体の種別が異なっても、それらを個別的に判定して、どのような組み合わせとなっているのかを判別することができる。
【0016】
望ましくは、前記判別手段は、前記高さプロファイル上において検体容器中心軸に相当する基準座標を特定する基準座標特定手段と、前記高さプロファイルに対して波形解析を行う手段であって、前記基準座標を利用して波形解析を行う機能を有する波形解析手段と、前記高さプロファイルの波形解析結果に基づいて前記検体容器の種別を判別する種別判別手段と、を含む。この構成によれば、例えば容器対称性を利用して基準座標がまず特定される。基準座標を特定すれば、そこを原点として波形参照領域や波形参照点を相対的に適切に定めることが可能となる。特に、検体容器に位置ズレや傾斜があっても、原点を見出した上で、それを基準として波形解析を行えるから、正確な判別が可能となる。
【0017】
望ましくは、前記波形解析手段は、前記基準座標を原点として水平方向に広がる第1参照領域内の高さ平均値と、前記基準座標を原点として水平方向に広がる第2参照領域内の凹凸程度を示す値と、を求める。平均値は例えば本体の高さや栓の有無を評価する際に利用できる。凹凸程度を示す値は、栓の有無の判断において利用でき、その他、栓の種別を特定するための特徴量を利用することも可能である。多面的な観点から、つまり複数の特徴量から総合的に種別を判断するのが望ましい。第1参照領域と第2参照領域は同一であってもよいし、別々であってもよい。望ましくは、前記波形解析手段は、前記高さプロファイル上の高さピークを特定する。これも栓の有無や栓の種別の判定等に利用できるものである。
【0018】
望ましくは、前記波形解析手段は、前記基準座標を原点として水平方向に広がる中央部波形部分についての波形特徴量と、前記基準座標を原点として水平方向に広がる周辺部波形部分についての波形特徴量と、を求める。特に採血管においては中央部に針を貫通するための弾性部材や構造が設けられており、その部分の形態及びその周囲の形態は採血管によって相違する。そこで、中央部と周辺部のそれぞれについて特徴量を求めるものである。
【0019】
望ましくは、前記波形解析手段は、前記高さプロファイルにおける2つのピーク間の距離を求める。栓の種別によって周辺部の立ち上がり位置が異なる場合が多いので、ピーク間距離は種別を判別するための特徴量として利用可能である。望ましくは、前記判別手段は、更に、検体容器の不存在、及び、栓の不存在を判別する。
【0020】
望ましくは、前記計測手段は、ラック搬送路の上方に設けられて前記測定ビームを下向きに形成する非接触式の距離センサを有し、前記ラックの搬送により、前記測定ビームが前記検体容器の上面中央部を相対的に横切るように走査される。
【0021】
本発明は、ラックに保持された採血管に対してその上方から光ビームの走査を行うことにより、前記採血管について一次元の高さプロファイルを取得する計測工程と、前記採血管について取得された高さプロファイルを解析することにより複数の波形特徴量を求める波形解析工程と、前記複数の波形特徴量に基づいて前記採血管における本体の種別及び栓の種別の組み合わせを判別する判別工程と、前記判別された本体の種別及び栓の種別の組み合わせに応じて、開栓動作、分注動作、及び、閉栓動作の少なくとも1つの動作条件を変更する制御工程と、を含むことを特徴とする検体前処理方法に関する。
【発明の効果】
【0022】
以上説明したように、本発明によれば、検体容器の種別を簡便に判別できる。あるいは、検体容器における栓の種別及び本体の種別の双方を判別できる。あるいは、検体容器としての採血管固有の形態に適合した判別方法の適用により採血管の種別を簡便かつ正確に判別できる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の好適な実施形態を図面に基づいて説明する。
【0024】
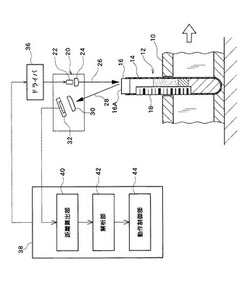
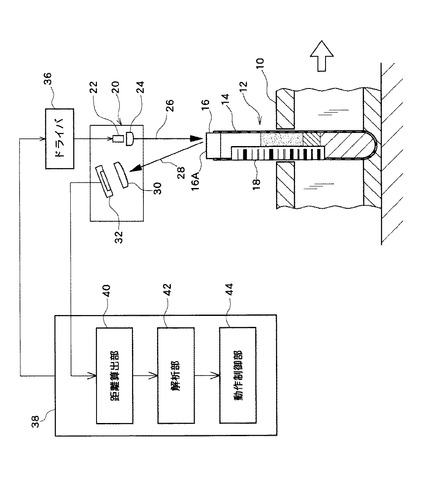
図1には、本発明に係る検体容器判別装置の好適な実施形態が示されており、図1はその要部構成を示す概念図である。この検体容器判別装置は本実施形態において検体前処理装置に組み込まれているものである。検体容器は本実施形態において遠心分離処理後の採血管である。周知のように、採血管は本体とその上部開口に装着された栓とにより構成され、本体としては高さの異なるいくつかの本体があり、一方、栓としてはゴム栓及びシール栓がある。本実施形態では、ゴム栓とシール栓との弁別が行われているが、もちろんゴム栓及びシール栓のそれぞれについてより細かく種別が判定されるようにしてもよい。
【0025】
図1において、ラック10には複数の採血管が起立状態で保持されている。図1には、1つの採血管12だけが示されている。採血管12内には血液検体が収容されており、具体的には、遠心分離後の血液検体が収容されている。採血管12は、チューブとしての本体14とその上部開口に装着された栓16とにより構成される。栓16については各種のものが存在している。本体14についても長さの異なるものがいくつか存在している。そのような栓及び本体について複数の種別がある中で、本実施形態の検体容器判別装置によれば、栓及び本体のそれぞれについて個別的に種別を判定することが可能である。ちなみに、本体14に対してはバーコードラベル等のラベル18が貼付されており、そのようなラベルの影響を受けずに種別の判定を行うため、ラック10の搬送経路における上方に光計測部20が設けられている。
【0026】
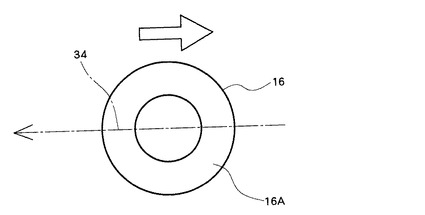
光計測部20は、光ビームを発生するLD(レーザーダイオード)22とレンズ24とを有しており、それらによって光ビーム26が形成される。この光ビームは、図2に示されるように、栓16における上面16Aの中心をできる限り通過するように、具体的には符号34で示されるような中心軸を通過するラインが形成されるように、光ビーム26が位置決めされている。図1に戻って、上面16Aで反射した光は符号28で示されるように光計測部20において受光される。具体的には、レンズ30を介して光検出器32によって検出される。
【0027】
LD22に対してはドライバ36からの駆動信号が供給されており、光検出器32からの検出信号は後に説明する距離算出部40へ出力されている。なお、図1においてはラック10を搬送する搬送機構は図示省略されている。光ビーム26は固定的に設定されているが、ラック10の搬送に伴って採血管12に対して相対的に光ビーム26が走査されることになり、その結果以下に説明する1次元の高さプロファイル(以下、単にプロファイルという)が得られる。
【0028】
演算制御部38は、CPU及び動作プログラム等によって構成されるものである。もっとも、演算制御部38が有する一部の機能が別のモジュールによって実現されてもよい。距離算出部40は光検出器32から出力される信号に基づいて各位置における距離を演算し、これによって1次元のプロファイルを生成する。すなわちラック10の搬送方向に沿った高さの変動を表すプロファイルが取得されることになる。解析部42は、生成されたプロファイルに対して波形解析を実行する。具体的な手法については後に説明するが、解析部42は、取得されたプロファイルに対して前処理を適用した上でプロファイルを採血管単位で分割する処理を実行し、各採血管ごとのプロファイルから複数の波形特徴量を求め、その情報を動作制御部44に出力している。動作制御部44は、波形解析結果に基づいて採血管の種別、具体的には栓の種別及び本体の種別を判別する機能を有している。その判別結果に基づき、後段に存在している開栓装置、分注装置、閉栓装置等の各構成の動作制御を行う。前もって、各採血管ごとにその種別が具体的に特定されるので、例えば開栓装置において、シール栓及びゴム栓のそれぞれ専用のユニットを適切に利用して、しかも動作条件を適切に設定して、開栓処理を遂行できるという利点が得られる。
【0029】
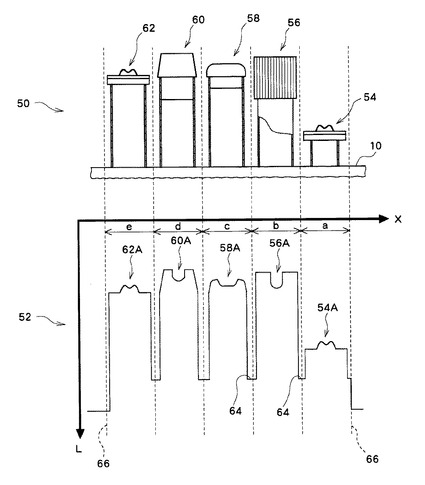
次に、図3乃至図17を用いて種別判定方法について説明する。図3において、符号50は、複数の採血管54〜62を保持したラック10を表している。各採血管54〜62は、図示の例において、それぞれ異なるものであり、本体及び栓の組み合わせが各採血管において相互に異なっている。本実施形態においては、このように各種の採血管が混在しているような場合においても個々の採血管についてその種別を適正に判定することができる。
【0030】
図3の符号52は、複数の採血管54〜62に対して光ビームを相対的に走査した場合に得られるプロファイルを表している。プロファイル52は、各位置による距離すなわち高さを表すものであり、それが水平のX方向に変動しているため、波形として取り扱うことが可能である。本実施形態においては、プロファイル52の解析に先立って、必要に応じてフィルタリングが実行される。例えばメディアンフィルタや平均化フィルタ等が利用され、プロファイルに存在するノイズ等が除去される。このような前処理が必要に応じて実行された上で、図3の下段に示されるように、各採血管単位で全体的なプロファイルを分割する処理が実行される。すなわち、複数のライン66は分割線を表しており、そのような複数のライン66によって全体的なプロファイル52が分割された結果、各区間a〜eに相当する部分波形としての各採血管単位でのプロファイルが得られることになる。そのプロファイルが符号54A〜62Aで示されている。ちなみに、符号64は、全体的なプロファイルにおける隣接採血管の間に存在する隙間を表している。両端の採血管の外側にも波形の落ち込みが生じている。いずれにしても、上記の分割処理により、各採血管単位でプロファイルが切り出されることになる。
【0031】
ちなみに、プロファイルの分割処理にあたっては、ラックの位置が既知であれば、ラック上における各採血管の存在範囲を容易に特定できるので、ラック位置を基準として分割処理を行うようにすればよい。あるいは、全体的なプロファイル52において、隣接する採血管の間に生じる隙間64や外側に存在する落ち込み等を特定できるのであれば、それらを基準として分割用のライン66を設定するようにすればよい。この他にもいくつかの手法が考えられる。なお、図3の下段においてXは搬送方向を表している。Lは光計測部側から見た距離を表している。換言すればそれは各位置における高さを表している。
【0032】
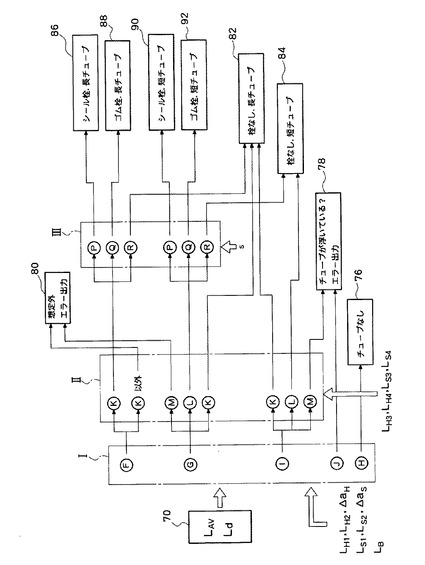
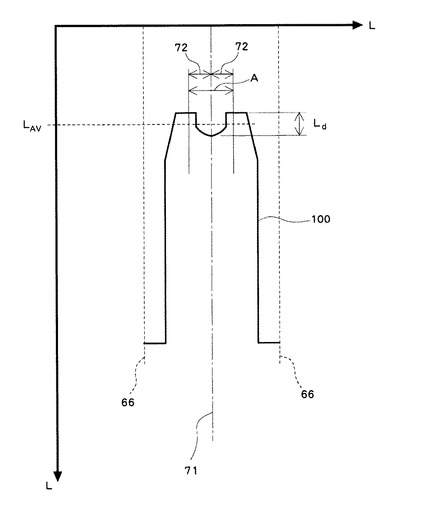
本実施形態においては、図4に示される判定方法に基づいて、本体及び栓の種別が特定されている。まず、符号70で示される工程について説明する。この工程では、図5に示される波形解析が実行される。図5において、符号100は対象となる採血管のプロファイルを表している。まずそのプロファイル100に対して中心線71が特定される。その中心線71は波形における重心点や中央値であってもよいし、ラック上における挿入孔の中心座標であってもよい。望ましくは、採血管の傾斜等への対処のため、実際の採血管の中心座標ができるだけ正確に特定されるように中心線71を定めるのが望ましい。このように中心線71すなわち原点が特定されると、中心線71の両側に一定距離72をカバーする区間として参照領域Aが定義される。参照領域Aは線の中央部及びその周囲の局所形態に着目するための領域である。
【0033】
参照領域A内における高さの平均値LAVと、参照領域A内における最高点と最低点とのギャップ(ばらつき)Ldとが求められる。ギャップLdは高さのばらつき範囲に相当するものであり、本実施形態では距離の最大値と最小値との間の大きさとして高さのばらつきが特定されている。
【0034】
このように平均値LAVとばらつきLdとが求められると、図4に示される解析工程Iが実行される。具体的には、図6に示す条件のいずれに該当するのかが判断されることになる。
【0035】
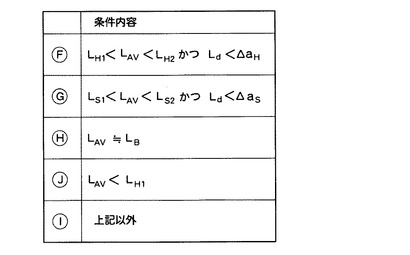
図6には、本実施形態において、F〜Jまでの5つの条件が示されており、上記のように求められた平均値LAVとばらつきLdとがいずれの条件に該当するのかが特定される。条件Fは、平均値LAVが閾値LH1よりも大きく、閾値LH2よりも小さく、且つ、ばらつきLdが比較値ΔaHよりも小さいという条件である。つまり、長い本体に相当する範囲内に平均値があり、且つ、ばらつきが大きくなく栓が不存在でない場合に条件Fが満たされる。
【0036】
同様に、条件Gは、平均値LAVが閾値LS1よりも大きく閾値LS2よりも小さく、且つ、ばらつきLdが比較値ΔaSよりも小さいという条件である。つまり、短い本体に相当する範囲内に平均値が該当し、しかもばらつきが小さく栓が不存在ではないことを判断する条件である。
【0037】
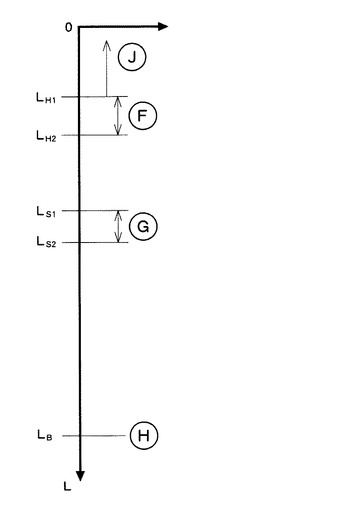
次に、条件Hは平均値LAVがラックの底の高さLBに相当するか否かを判断する条件であり、その条件が満たされた場合には採血管そのものが無いことが推定される。条件Jは平均値LAVが比較値LH1よりも小さいという条件であり、この条件はエラーを判断するためのものである。更に、条件Iは上記で説明した条件F、G、H、J以外の場合を判定する条件である。図7には、平均値LAVと比較されるいくつかの閾値及び比較値が示されており、また各条件が該当する範囲が明示されている。
【0038】
図4に戻って、解析工程Iにおいて、条件Hが満たされた場合には、符号76で示されたようにチューブすなわち採血管自体が無いと判定される。一方、条件Jが満たされた場合には、符号78で示されるように、チューブすなわち採血管が浮いていることが予想され、いずれにしても適正な状態ではないのでエラーが判断される。一方、条件F、G及びIが満たされた場合には、次に説明する解析工程IIが実行される。ちなみに、上述した解析工程Iにおいて用いられる閾値及び比較値については判別対象となる採血管群に応じて適宜定めればよい。平均値及びばらつき以外の他の特徴量を利用して上述した解析工程Iを実行するようにしてもよい。
【0039】
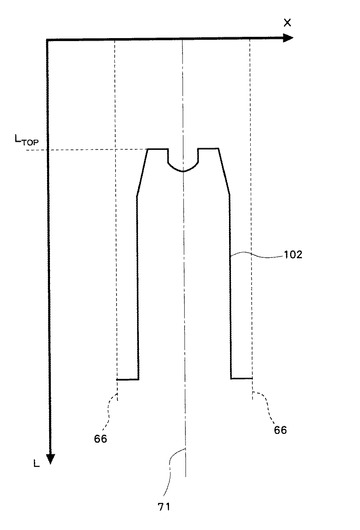
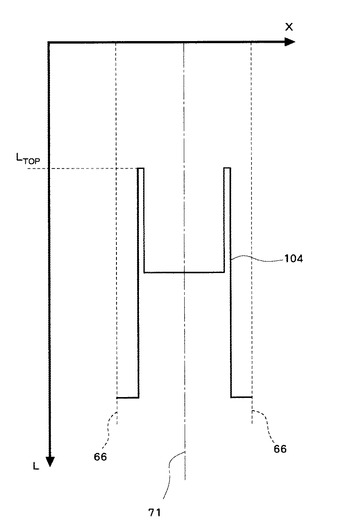
図4において、解析工程IIでは、図8及び図9で示すようにプロファイル102,104におけるピーク値LTOPが求められる。図8及び図9にはそれぞれ異なる採血管に対応するプロファイル102,104が示されている。ピーク値LTOPは分割された各区間内におけるピーク値であってもよいし、中心線71を基準として水平方向に設定された所定範囲内におけるピーク値であってもよい。
【0040】
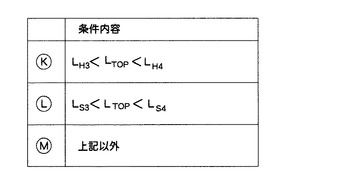
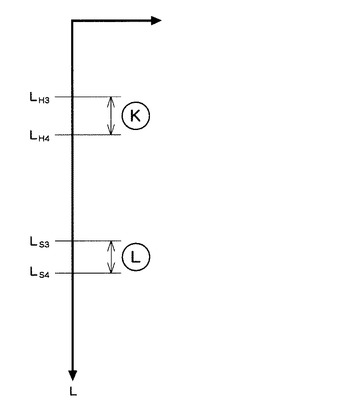
このようにピーク値LTOPが求められると、図10に示すいずれの条件が満たされるのかが判断される。図10には、この実施形態における3つの条件K,L,Mが示されている。条件Kはピーク値LTOPが閾値LH3より大きく閾値LH4よりも小さいという条件であり、この条件によれば栓の有無に関係なく長い本体を判別することが可能である。条件Lは、ピーク値LTOPが閾値LS3より大きく閾値LS4より小さいという条件であり、この条件Lによれば栓の有無に関係無く短い本体を判別することが可能である。条件Mは上記の条件K及び条件Lが満たされない場合の条件である。図11には、距離L上におけるそれぞれの閾値が示されており、同時に条件K及び条件Lの範囲が示されている。なお、各閾値については上記同様に対象となる採血管群に応じて適宜定めればよい。
【0041】
図4に戻って、解析工程IIでは、いずれの条件が満たされたのが判断され、図示されるように、前の解析工程Iで判定された条件との組み合わせに応じて、次の処理或いは判定内容が異なっている。具体的には、条件F及び条件Kが満たされた場合、次の解析工程IIIが実行される。条件Fが満たされたにもかかわらず、条件K以外が満たされた場合には符号80で示されるように想定外であるとしてエラー処理が実行される。同様に、条件Gが満たされ、条件Mが満たされた場合には、エラー処理が実行される。条件G及び条件Lが満たされた場合には解析工程IIIが実行される。条件G及び条件Kが満たされた場合には、符号82で示されるように、栓の不存在が判定され、本体が長いチューブであると判定される。
【0042】
条件I及び条件Kが満たされた場合には符号82で示される判定が実行され、条件I及び条件Lが満たされた場合には符号84で示されるように、栓の不存在と本体が短いチューブであることとが判定される。条件I及び条件Mが判定された場合には、上記のようにエラーが出力される。
【0043】
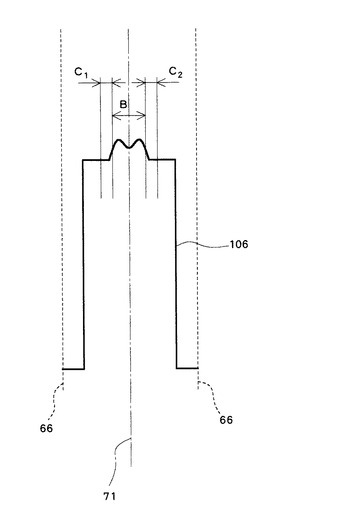
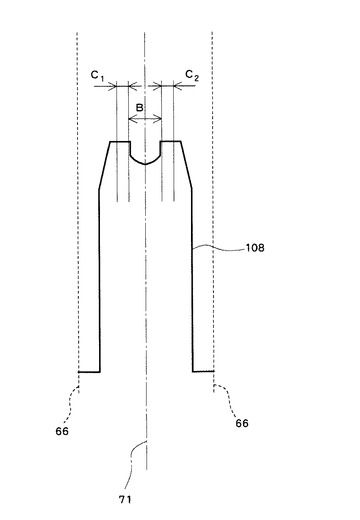
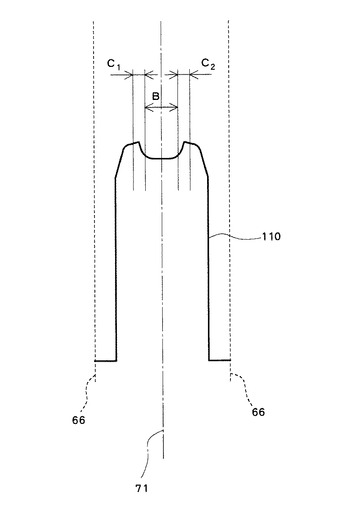
次に、図4に示される解析工程IIIについて説明する。この工程では、図12〜図14で示される2種類の平均値が演算される。具体的には、中心線71を基準として、中央部分に参照領域Bが設定されており、その周囲に参照領域Cが設定されている。参照領域Cは区間C1及びC2により構成されるものである。つまり、栓の種別の判定にあたっては、栓の中央部分の形態及びその周辺部分の形態が特徴量になり得るのであり、部位に応じた個別評価を行うために、2種類の参照領域が設定される。図12〜図14には互いに異なる採血管に対応するプロファイル106,108,110が示されており、それぞれのプロファイル106,108,110において参照領域B及び参照領域Cにおける形態あるいは高さの組み合わせはかなり異なっていると言える。
【0044】
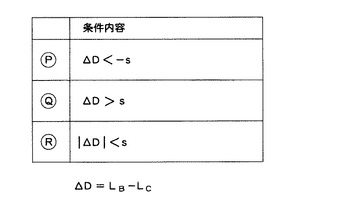
本実施形態では、参照領域Bにおける高さの平均値LBと、参照領域Cにおける高さの平均値LCとが算出される。そして、ΔD=LB−LCの計算が実行され、その指数ΔDが図5に示されるいずれの条件を満たすのかが判断される。図15において、条件Pは、指数ΔDが−sよりも小さいという条件である。ここで、sは栓が存在せずに液面が検知されてしまった場合における指数ΔDが取り得る最大値であり、ここでsは例えば0に近い値である。条件Qは指数ΔDがsよりも大きいという条件である。条件Rは指数ΔDの絶対値がsよりも小さいという条件である。
【0045】
図4に戻って、解析工程IIIでは、図15に示したいずれの条件が満たされたのかが判断される。ここで、条件Pが満たされたと判断された場合、それ以前の2つの解析工程において判断された条件の組み合わせに応じて、符号86で示される判定又は符号90で示される判定がなされる。符号86で示される判定は、シール栓であり且つ本体が長いチューブであるという内容である。符号90で示される判定は、シール栓であり、本体が短いチューブであるという内容である。条件Qが満たされたと判断された場合、それ以前の2つの解析構成において判定された条件の組み合わせに応じて、符号88で示される判定又は符号92で示される判定がなされる。符号88で示される判定は、ゴム栓であり、本体が長いチューブであるという内容を有するものであり、符号92で示される判定は、ゴム栓であり本体が短いチューブであるという内容を有するものである。更に、解析工程IIIにおいて、条件Rが満たされたと判断された場合、上記同様に、解析工程I及びIIで判定された条件の組み合わせに応じて、符号82で示される判定又は符号84に示される判定がなされる。符号82で示される判定は、栓が無く、本体が長いチューブであるという内容を有し、符号84で示される判定は栓が無く、本体が短いチューブであるという内容を有する。
【0046】
以上のように、図4で示されるように、多面的に波形の特徴量を観測することにより、栓の種別のみならず、本体の種別(実施形態では高さ)までを個別的に判断することができ、しかも栓の有無や採血管それ自体の有無までを判定できるという利点がある。上述した各特徴量は例示であり、それ以外の特徴量を利用するようにしてもよい。判別対象となる採血管群においてそれぞれの採血管が際立っている部分がより明らかになるように特徴量を定めるのが望ましい。また、場合によっては、栓の色を認識して、色を判断基準として採用することも可能である。更に、栓の直径等もプロファイルから容易に観測することができるので、直径を特徴量として利用することも可能である。上記実施形態においては、各採血管に対応するプロファイルにおいてまず中心線を特定し、それを座標原点として利用しつつ波形解析を行ったので、仮に試験管の位置にずれがあっても解析精度の低下を防止できるという利点がある。同様に、採血管が少々傾いていても、上述したプロセスをそのまま実行して正確な判定を行えるという利点がある。もっとも、採血管が大きく傾いていたり、プロファイルが取得できない程度、直交方向に傾いているような場合には、エラー処理を適用するようにしてもよいし、また光ビームを直交方向にスキャンする方式を併用するようにしてもよい。
【0047】
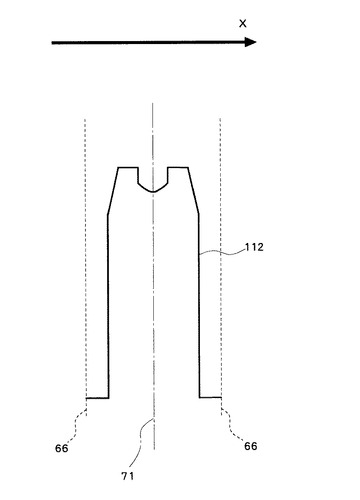
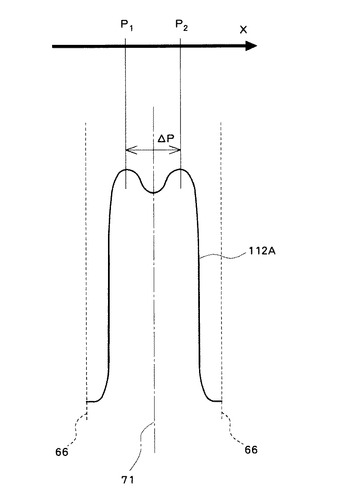
上述した図4に示す判定プロセスにおいて十分な判別を行えない場合には、更に図16及び図17に示すような手法を利用するようにしてもよい。図16には、ある採血管においてのプロファイル112が示されている。これに対して強い平滑化処理をかけることにより、図17に示すようなプロファイル112Aを得ることができる。すなわち中心線71の両側に立ち上がっている矩形状の突出部分に丸みを持たせてそれらのピークを特定できるようにしたものである。ここでは、2つのピークP1及びP2が特定されており、それらの間隔ΔPは栓の種別の判定にあたっての1つの特徴量をなすものであると認められるため、それをさらに利用して、あるいは上述したいずれかの特徴例に代えて利用することにより、より高精度に栓の種別を判定することが可能である。また、ピーク位置における高さのずれ等から、上述したシール栓の縁部分に存在するタブの折れ曲がりに起因するエラー要因を除外するようにしてもよい。
【0048】
以上説明した本実施形態の判別方法よれば、光ビームを照射して高さ計測を行うだけで、ラックの搬送と相まって一次元のプロファイルを取得でき、そのプロファイルに対するソフトウェア解析により、各採血管単位で具体的に種別を特定することが可能である。そのように特定された情報を後段の開栓処理等の動作条件に反映させれば、検体前処理装置全体としての動作効率や信頼性を著しく高めることができるという利点がある。従来においては、上述したような多数の採血管が混載されたようなラックを受け入れることが困難であった検体前処理装置においても、上流側に上述した検体容器判別装置を組み込めば、そのような混載状態にあるラックに対して検体前処理を円滑に遂行させることができるという利点が得られる。上述した実施形態における光ビームに代えて上方からあるいは側面から採血管を撮像し、その撮像結果である画像の解析により種別の判定を行うことも可能であるが、そのような場合にはどうしてもコストアップという問題が生じやすい。上記構成によれば、一次元の光ビームの走査だけで簡便且つ迅速に種別の判定を行えるので、実用性の高い判別装置を構成できるという利点が得られる。
【図面の簡単な説明】
【0049】
【図1】本発明に係る検体容器判別装置の好適な実施形態を示す要部構成図である。
【図2】光ビームのスキャン経路を説明するための図である。
【図3】ラック上に搭載された複数の採血管とそれらに対応するプロファイル等を示す説明図である。
【図4】本実施形態に係る種別判定方法の全体的な流れを説明するための概念図である。
【図5】特徴量としての平均値及びばらつきを説明するための図である。
【図6】第1解析工程において判定される条件を説明するための図である。
【図7】図6に示した複数の条件の相互関係を説明するための図である。
【図8】他の特徴量としてのピーク値を説明するための図である。
【図9】他の特徴量としてのピーク値を説明するための図である。
【図10】第2解析工程において判定される条件を説明するための説明図である。
【図11】図10に示した複数の条件の相互関係を説明するための図である。
【図12】更に他の特徴量としての中央部分の平均値及び周辺部分の平均値を説明するための図である。
【図13】更に他の特徴量としての中央部分の平均値及び周辺部分の平均値を説明するための図である。
【図14】更に他の特徴量としての中央部分の平均値及び周辺部分の平均値を説明するための図である。
【図15】第3解析工程において判定される条件を説明するための図である。
【図16】採血管のプロファイルを示す図である。
【図17】図16に示したプロファイルに対して平滑化処理を適用した後のプロファイルを示すものであり、2つのピークの特定を説明するための図である。
【符号の説明】
【0050】
10 ラック、12 採血管、14 本体、16 栓、20 光計測部、38 演算制御部、40 距離算出部、42 解析部、44 動作制御部。
【技術分野】
【0001】
本発明は、検体容器判別装置に関し、特に、採血管等の検体容器の種別を非接触で判別する装置に関する。
【背景技術】
【0002】
検体前処理装置は、遠心分離ユニット、開栓ユニット、分注ユニット、閉栓ユニット等によって構成される。検体前処理装置においては、複数の採血管を保持したラックが搬送される。採血管には栓が設けられ、その栓の種別としてはゴム栓、シール栓等があげられる。同じゴム栓であっても、形、色等が異なる様々なものがあり、これはシール栓についても同様である。採血管の本体についても幾つかの種類がある。典型的には、長さが異なる複数の本体が存在する。
【0003】
上記の開栓ユニットにおいては、栓の種類に応じて、場合によっては更に本体の種類に応じて、その動作条件を事前に設定する必要がある。例えば、ゴム栓及びシール栓等の種類に応じて、専用の開栓機構へ採血管を投入し、そこで対象採血管に適合した動作条件をもって開栓作業を行わせる必要がある。このため、栓の種類及び本体の種類を開栓に先立って計測しておくことが望まれる。
【0004】
特許文献1には、栓の有無や高さを検出するセンサを備えた検体処理システムが開示されている。特許文献2には、液面の高さを検出するセンサを備えた装置が記載されている。当該センサの出力としてスキャン位置に応じた反射光データが得られている(図5参照)。但し、それは栓を検出するものではない。
【0005】
【特許文献1】特開2007−85967号公報
【特許文献2】特開2005−221392号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明の目的は、検体容器の種別を簡便に判別できるようにすることにある。
【0007】
本発明の他の目的は、検体容器における栓の種別及び本体の種別の双方を判別できるようにすることにある。
【0008】
本発明の他の目的は、検体容器としての採血管固有の形態に適合した判別方法の適用により採血管の種別を簡便かつ正確に判別できるようにすることにある。
【課題を解決するための手段】
【0009】
本発明は、ラックに保持された検体容器に対してその上方から光ビームの走査を行うことにより、前記検体容器について一次元の高さプロファイルを取得する計測手段と、前記検体容器について取得された高さプロファイルを解析することにより、前記検体容器の種別を判別する判別手段と、を含むことを特徴とする検体容器判別装置に関する。
【0010】
上記構成によれば、採血管等の検体容器に対して光ビームを相対的に移動させて一次元の高さプロファイルが取得される。この場合、光ビームそれ自体を走査するようにしてもよいが、それを固定してラック搬送により検体容器を前方へ送って結果として光ビームが検体容器に対して相対的に走査されるようにしてもよい。一次元の高さプロファイルは、連続的なサンプリングデータによって構成されてもよいし、離散的なサンプリングデータにより構成されてもよい。
【0011】
ラック上に複数の検体容器が保持され、それらの全体に対する連続的な光ビーム走査によって全体的な高さプロファイルが取得される場合、波形解析に先立って、全体的な高さプロファイルを個々の検体容器ごとの高さプロファイル(部分波形)に分割する処理を施すのが望ましい。ラックの位置が既知であれば、ラック上における各検体容器の存在範囲は容易に特定できる。勿論、全体的な高さプロファイルにおける検体容器間の隙間を特定することにより(及び両端の検体容器の外側の落ち込みを特定することにより)、各検体容器ごとの高さプロファイルを切り出すことも可能である。
【0012】
各検体容器についての高さプロファイルの波形形態は検体容器の上部形状を反映したものとなっているので、高さプロファイルの波形を解析することにより、検体容器の種別を特定することが可能となる。判別対象が採血管であれば、基本的に、その本体は中心軸を中心として回転対称形状を有し、同様に、その栓(ゴム栓、アルミシール栓、等)も中心軸を中心として回転対称形状を有しているから、採血管がどのような回転角度にあっても、その中心軸(又はその付近)を通過する一次元の高さプロファイルを取得すれば、そこから採血管の種別を判別することが可能となる。特に、栓の種別に応じて上部形態が顕著に異なるから、その異なる部分が明らかになるような少なくととも1つの(望ましくは複数の)波形特徴量を演算するのが望ましい。なお、アルミシール栓の中には鍔状のタブが付いているものもあるが、その部分を波形解析対象から除外してもよく、また、タブが折れ曲がっていて計測に障害が生じるならばエラー処理にて対処することも可能である。上記構成に加えて、栓の色等の情報を併せて考慮して検体容器の種別を判別するようにしてもよい。
【0013】
上記構成では、光ビームが利用されているので、非接触での種別判定が可能となる。よって、汚染の問題を回避できる。検体容器がラック上において若干傾斜していることも考えられる。光ビームの走査方向への傾斜に対しては、高さプロファイル上において検体容器の基準座標を見出し、それを原点として計測座標を定めるのが望ましい。一方、光ビームの走査方向と直交する方向への傾斜に対しては、それが若干であって、検体容器の上部形態を反映した一次元の高さプロファイルが取得できる限りにおいては上記構成をそのまま使うことが可能である。一方、有効な高さプロファイルを得られないような場合には、エラー処理で対処してもよいし、光ビームのスキャン経路を複数個並行に設定して有効な高さプロファイルを選択的に利用するようにしてもよい。
【0014】
望ましくは、前記判別手段は、少なくとも、前記各検体容器に装着された栓の種別を判別する。採血管については、各種のゴム栓及び各種のシール栓が存在し、それらが混在して流されても、上記構成によれば、個々の採血管について栓の種別を個別的に判定できるから、後工程において有用な情報を取得できる。あるいは、データベース上に登録された種別に対して実測した種別を突き合わせること等が可能となる。
【0015】
望ましくは、前記判別手段は、更に前記検体容器の本体の種別を判別し、前記判別手段により、前記検体容器の種別として、前記本体の種別と栓の種別との組み合わせが判別される。この構成によれば、栓の種別のみならず、本体の種別が異なっても、それらを個別的に判定して、どのような組み合わせとなっているのかを判別することができる。
【0016】
望ましくは、前記判別手段は、前記高さプロファイル上において検体容器中心軸に相当する基準座標を特定する基準座標特定手段と、前記高さプロファイルに対して波形解析を行う手段であって、前記基準座標を利用して波形解析を行う機能を有する波形解析手段と、前記高さプロファイルの波形解析結果に基づいて前記検体容器の種別を判別する種別判別手段と、を含む。この構成によれば、例えば容器対称性を利用して基準座標がまず特定される。基準座標を特定すれば、そこを原点として波形参照領域や波形参照点を相対的に適切に定めることが可能となる。特に、検体容器に位置ズレや傾斜があっても、原点を見出した上で、それを基準として波形解析を行えるから、正確な判別が可能となる。
【0017】
望ましくは、前記波形解析手段は、前記基準座標を原点として水平方向に広がる第1参照領域内の高さ平均値と、前記基準座標を原点として水平方向に広がる第2参照領域内の凹凸程度を示す値と、を求める。平均値は例えば本体の高さや栓の有無を評価する際に利用できる。凹凸程度を示す値は、栓の有無の判断において利用でき、その他、栓の種別を特定するための特徴量を利用することも可能である。多面的な観点から、つまり複数の特徴量から総合的に種別を判断するのが望ましい。第1参照領域と第2参照領域は同一であってもよいし、別々であってもよい。望ましくは、前記波形解析手段は、前記高さプロファイル上の高さピークを特定する。これも栓の有無や栓の種別の判定等に利用できるものである。
【0018】
望ましくは、前記波形解析手段は、前記基準座標を原点として水平方向に広がる中央部波形部分についての波形特徴量と、前記基準座標を原点として水平方向に広がる周辺部波形部分についての波形特徴量と、を求める。特に採血管においては中央部に針を貫通するための弾性部材や構造が設けられており、その部分の形態及びその周囲の形態は採血管によって相違する。そこで、中央部と周辺部のそれぞれについて特徴量を求めるものである。
【0019】
望ましくは、前記波形解析手段は、前記高さプロファイルにおける2つのピーク間の距離を求める。栓の種別によって周辺部の立ち上がり位置が異なる場合が多いので、ピーク間距離は種別を判別するための特徴量として利用可能である。望ましくは、前記判別手段は、更に、検体容器の不存在、及び、栓の不存在を判別する。
【0020】
望ましくは、前記計測手段は、ラック搬送路の上方に設けられて前記測定ビームを下向きに形成する非接触式の距離センサを有し、前記ラックの搬送により、前記測定ビームが前記検体容器の上面中央部を相対的に横切るように走査される。
【0021】
本発明は、ラックに保持された採血管に対してその上方から光ビームの走査を行うことにより、前記採血管について一次元の高さプロファイルを取得する計測工程と、前記採血管について取得された高さプロファイルを解析することにより複数の波形特徴量を求める波形解析工程と、前記複数の波形特徴量に基づいて前記採血管における本体の種別及び栓の種別の組み合わせを判別する判別工程と、前記判別された本体の種別及び栓の種別の組み合わせに応じて、開栓動作、分注動作、及び、閉栓動作の少なくとも1つの動作条件を変更する制御工程と、を含むことを特徴とする検体前処理方法に関する。
【発明の効果】
【0022】
以上説明したように、本発明によれば、検体容器の種別を簡便に判別できる。あるいは、検体容器における栓の種別及び本体の種別の双方を判別できる。あるいは、検体容器としての採血管固有の形態に適合した判別方法の適用により採血管の種別を簡便かつ正確に判別できる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の好適な実施形態を図面に基づいて説明する。
【0024】
図1には、本発明に係る検体容器判別装置の好適な実施形態が示されており、図1はその要部構成を示す概念図である。この検体容器判別装置は本実施形態において検体前処理装置に組み込まれているものである。検体容器は本実施形態において遠心分離処理後の採血管である。周知のように、採血管は本体とその上部開口に装着された栓とにより構成され、本体としては高さの異なるいくつかの本体があり、一方、栓としてはゴム栓及びシール栓がある。本実施形態では、ゴム栓とシール栓との弁別が行われているが、もちろんゴム栓及びシール栓のそれぞれについてより細かく種別が判定されるようにしてもよい。
【0025】
図1において、ラック10には複数の採血管が起立状態で保持されている。図1には、1つの採血管12だけが示されている。採血管12内には血液検体が収容されており、具体的には、遠心分離後の血液検体が収容されている。採血管12は、チューブとしての本体14とその上部開口に装着された栓16とにより構成される。栓16については各種のものが存在している。本体14についても長さの異なるものがいくつか存在している。そのような栓及び本体について複数の種別がある中で、本実施形態の検体容器判別装置によれば、栓及び本体のそれぞれについて個別的に種別を判定することが可能である。ちなみに、本体14に対してはバーコードラベル等のラベル18が貼付されており、そのようなラベルの影響を受けずに種別の判定を行うため、ラック10の搬送経路における上方に光計測部20が設けられている。
【0026】
光計測部20は、光ビームを発生するLD(レーザーダイオード)22とレンズ24とを有しており、それらによって光ビーム26が形成される。この光ビームは、図2に示されるように、栓16における上面16Aの中心をできる限り通過するように、具体的には符号34で示されるような中心軸を通過するラインが形成されるように、光ビーム26が位置決めされている。図1に戻って、上面16Aで反射した光は符号28で示されるように光計測部20において受光される。具体的には、レンズ30を介して光検出器32によって検出される。
【0027】
LD22に対してはドライバ36からの駆動信号が供給されており、光検出器32からの検出信号は後に説明する距離算出部40へ出力されている。なお、図1においてはラック10を搬送する搬送機構は図示省略されている。光ビーム26は固定的に設定されているが、ラック10の搬送に伴って採血管12に対して相対的に光ビーム26が走査されることになり、その結果以下に説明する1次元の高さプロファイル(以下、単にプロファイルという)が得られる。
【0028】
演算制御部38は、CPU及び動作プログラム等によって構成されるものである。もっとも、演算制御部38が有する一部の機能が別のモジュールによって実現されてもよい。距離算出部40は光検出器32から出力される信号に基づいて各位置における距離を演算し、これによって1次元のプロファイルを生成する。すなわちラック10の搬送方向に沿った高さの変動を表すプロファイルが取得されることになる。解析部42は、生成されたプロファイルに対して波形解析を実行する。具体的な手法については後に説明するが、解析部42は、取得されたプロファイルに対して前処理を適用した上でプロファイルを採血管単位で分割する処理を実行し、各採血管ごとのプロファイルから複数の波形特徴量を求め、その情報を動作制御部44に出力している。動作制御部44は、波形解析結果に基づいて採血管の種別、具体的には栓の種別及び本体の種別を判別する機能を有している。その判別結果に基づき、後段に存在している開栓装置、分注装置、閉栓装置等の各構成の動作制御を行う。前もって、各採血管ごとにその種別が具体的に特定されるので、例えば開栓装置において、シール栓及びゴム栓のそれぞれ専用のユニットを適切に利用して、しかも動作条件を適切に設定して、開栓処理を遂行できるという利点が得られる。
【0029】
次に、図3乃至図17を用いて種別判定方法について説明する。図3において、符号50は、複数の採血管54〜62を保持したラック10を表している。各採血管54〜62は、図示の例において、それぞれ異なるものであり、本体及び栓の組み合わせが各採血管において相互に異なっている。本実施形態においては、このように各種の採血管が混在しているような場合においても個々の採血管についてその種別を適正に判定することができる。
【0030】
図3の符号52は、複数の採血管54〜62に対して光ビームを相対的に走査した場合に得られるプロファイルを表している。プロファイル52は、各位置による距離すなわち高さを表すものであり、それが水平のX方向に変動しているため、波形として取り扱うことが可能である。本実施形態においては、プロファイル52の解析に先立って、必要に応じてフィルタリングが実行される。例えばメディアンフィルタや平均化フィルタ等が利用され、プロファイルに存在するノイズ等が除去される。このような前処理が必要に応じて実行された上で、図3の下段に示されるように、各採血管単位で全体的なプロファイルを分割する処理が実行される。すなわち、複数のライン66は分割線を表しており、そのような複数のライン66によって全体的なプロファイル52が分割された結果、各区間a〜eに相当する部分波形としての各採血管単位でのプロファイルが得られることになる。そのプロファイルが符号54A〜62Aで示されている。ちなみに、符号64は、全体的なプロファイルにおける隣接採血管の間に存在する隙間を表している。両端の採血管の外側にも波形の落ち込みが生じている。いずれにしても、上記の分割処理により、各採血管単位でプロファイルが切り出されることになる。
【0031】
ちなみに、プロファイルの分割処理にあたっては、ラックの位置が既知であれば、ラック上における各採血管の存在範囲を容易に特定できるので、ラック位置を基準として分割処理を行うようにすればよい。あるいは、全体的なプロファイル52において、隣接する採血管の間に生じる隙間64や外側に存在する落ち込み等を特定できるのであれば、それらを基準として分割用のライン66を設定するようにすればよい。この他にもいくつかの手法が考えられる。なお、図3の下段においてXは搬送方向を表している。Lは光計測部側から見た距離を表している。換言すればそれは各位置における高さを表している。
【0032】
本実施形態においては、図4に示される判定方法に基づいて、本体及び栓の種別が特定されている。まず、符号70で示される工程について説明する。この工程では、図5に示される波形解析が実行される。図5において、符号100は対象となる採血管のプロファイルを表している。まずそのプロファイル100に対して中心線71が特定される。その中心線71は波形における重心点や中央値であってもよいし、ラック上における挿入孔の中心座標であってもよい。望ましくは、採血管の傾斜等への対処のため、実際の採血管の中心座標ができるだけ正確に特定されるように中心線71を定めるのが望ましい。このように中心線71すなわち原点が特定されると、中心線71の両側に一定距離72をカバーする区間として参照領域Aが定義される。参照領域Aは線の中央部及びその周囲の局所形態に着目するための領域である。
【0033】
参照領域A内における高さの平均値LAVと、参照領域A内における最高点と最低点とのギャップ(ばらつき)Ldとが求められる。ギャップLdは高さのばらつき範囲に相当するものであり、本実施形態では距離の最大値と最小値との間の大きさとして高さのばらつきが特定されている。
【0034】
このように平均値LAVとばらつきLdとが求められると、図4に示される解析工程Iが実行される。具体的には、図6に示す条件のいずれに該当するのかが判断されることになる。
【0035】
図6には、本実施形態において、F〜Jまでの5つの条件が示されており、上記のように求められた平均値LAVとばらつきLdとがいずれの条件に該当するのかが特定される。条件Fは、平均値LAVが閾値LH1よりも大きく、閾値LH2よりも小さく、且つ、ばらつきLdが比較値ΔaHよりも小さいという条件である。つまり、長い本体に相当する範囲内に平均値があり、且つ、ばらつきが大きくなく栓が不存在でない場合に条件Fが満たされる。
【0036】
同様に、条件Gは、平均値LAVが閾値LS1よりも大きく閾値LS2よりも小さく、且つ、ばらつきLdが比較値ΔaSよりも小さいという条件である。つまり、短い本体に相当する範囲内に平均値が該当し、しかもばらつきが小さく栓が不存在ではないことを判断する条件である。
【0037】
次に、条件Hは平均値LAVがラックの底の高さLBに相当するか否かを判断する条件であり、その条件が満たされた場合には採血管そのものが無いことが推定される。条件Jは平均値LAVが比較値LH1よりも小さいという条件であり、この条件はエラーを判断するためのものである。更に、条件Iは上記で説明した条件F、G、H、J以外の場合を判定する条件である。図7には、平均値LAVと比較されるいくつかの閾値及び比較値が示されており、また各条件が該当する範囲が明示されている。
【0038】
図4に戻って、解析工程Iにおいて、条件Hが満たされた場合には、符号76で示されたようにチューブすなわち採血管自体が無いと判定される。一方、条件Jが満たされた場合には、符号78で示されるように、チューブすなわち採血管が浮いていることが予想され、いずれにしても適正な状態ではないのでエラーが判断される。一方、条件F、G及びIが満たされた場合には、次に説明する解析工程IIが実行される。ちなみに、上述した解析工程Iにおいて用いられる閾値及び比較値については判別対象となる採血管群に応じて適宜定めればよい。平均値及びばらつき以外の他の特徴量を利用して上述した解析工程Iを実行するようにしてもよい。
【0039】
図4において、解析工程IIでは、図8及び図9で示すようにプロファイル102,104におけるピーク値LTOPが求められる。図8及び図9にはそれぞれ異なる採血管に対応するプロファイル102,104が示されている。ピーク値LTOPは分割された各区間内におけるピーク値であってもよいし、中心線71を基準として水平方向に設定された所定範囲内におけるピーク値であってもよい。
【0040】
このようにピーク値LTOPが求められると、図10に示すいずれの条件が満たされるのかが判断される。図10には、この実施形態における3つの条件K,L,Mが示されている。条件Kはピーク値LTOPが閾値LH3より大きく閾値LH4よりも小さいという条件であり、この条件によれば栓の有無に関係なく長い本体を判別することが可能である。条件Lは、ピーク値LTOPが閾値LS3より大きく閾値LS4より小さいという条件であり、この条件Lによれば栓の有無に関係無く短い本体を判別することが可能である。条件Mは上記の条件K及び条件Lが満たされない場合の条件である。図11には、距離L上におけるそれぞれの閾値が示されており、同時に条件K及び条件Lの範囲が示されている。なお、各閾値については上記同様に対象となる採血管群に応じて適宜定めればよい。
【0041】
図4に戻って、解析工程IIでは、いずれの条件が満たされたのが判断され、図示されるように、前の解析工程Iで判定された条件との組み合わせに応じて、次の処理或いは判定内容が異なっている。具体的には、条件F及び条件Kが満たされた場合、次の解析工程IIIが実行される。条件Fが満たされたにもかかわらず、条件K以外が満たされた場合には符号80で示されるように想定外であるとしてエラー処理が実行される。同様に、条件Gが満たされ、条件Mが満たされた場合には、エラー処理が実行される。条件G及び条件Lが満たされた場合には解析工程IIIが実行される。条件G及び条件Kが満たされた場合には、符号82で示されるように、栓の不存在が判定され、本体が長いチューブであると判定される。
【0042】
条件I及び条件Kが満たされた場合には符号82で示される判定が実行され、条件I及び条件Lが満たされた場合には符号84で示されるように、栓の不存在と本体が短いチューブであることとが判定される。条件I及び条件Mが判定された場合には、上記のようにエラーが出力される。
【0043】
次に、図4に示される解析工程IIIについて説明する。この工程では、図12〜図14で示される2種類の平均値が演算される。具体的には、中心線71を基準として、中央部分に参照領域Bが設定されており、その周囲に参照領域Cが設定されている。参照領域Cは区間C1及びC2により構成されるものである。つまり、栓の種別の判定にあたっては、栓の中央部分の形態及びその周辺部分の形態が特徴量になり得るのであり、部位に応じた個別評価を行うために、2種類の参照領域が設定される。図12〜図14には互いに異なる採血管に対応するプロファイル106,108,110が示されており、それぞれのプロファイル106,108,110において参照領域B及び参照領域Cにおける形態あるいは高さの組み合わせはかなり異なっていると言える。
【0044】
本実施形態では、参照領域Bにおける高さの平均値LBと、参照領域Cにおける高さの平均値LCとが算出される。そして、ΔD=LB−LCの計算が実行され、その指数ΔDが図5に示されるいずれの条件を満たすのかが判断される。図15において、条件Pは、指数ΔDが−sよりも小さいという条件である。ここで、sは栓が存在せずに液面が検知されてしまった場合における指数ΔDが取り得る最大値であり、ここでsは例えば0に近い値である。条件Qは指数ΔDがsよりも大きいという条件である。条件Rは指数ΔDの絶対値がsよりも小さいという条件である。
【0045】
図4に戻って、解析工程IIIでは、図15に示したいずれの条件が満たされたのかが判断される。ここで、条件Pが満たされたと判断された場合、それ以前の2つの解析工程において判断された条件の組み合わせに応じて、符号86で示される判定又は符号90で示される判定がなされる。符号86で示される判定は、シール栓であり且つ本体が長いチューブであるという内容である。符号90で示される判定は、シール栓であり、本体が短いチューブであるという内容である。条件Qが満たされたと判断された場合、それ以前の2つの解析構成において判定された条件の組み合わせに応じて、符号88で示される判定又は符号92で示される判定がなされる。符号88で示される判定は、ゴム栓であり、本体が長いチューブであるという内容を有するものであり、符号92で示される判定は、ゴム栓であり本体が短いチューブであるという内容を有するものである。更に、解析工程IIIにおいて、条件Rが満たされたと判断された場合、上記同様に、解析工程I及びIIで判定された条件の組み合わせに応じて、符号82で示される判定又は符号84に示される判定がなされる。符号82で示される判定は、栓が無く、本体が長いチューブであるという内容を有し、符号84で示される判定は栓が無く、本体が短いチューブであるという内容を有する。
【0046】
以上のように、図4で示されるように、多面的に波形の特徴量を観測することにより、栓の種別のみならず、本体の種別(実施形態では高さ)までを個別的に判断することができ、しかも栓の有無や採血管それ自体の有無までを判定できるという利点がある。上述した各特徴量は例示であり、それ以外の特徴量を利用するようにしてもよい。判別対象となる採血管群においてそれぞれの採血管が際立っている部分がより明らかになるように特徴量を定めるのが望ましい。また、場合によっては、栓の色を認識して、色を判断基準として採用することも可能である。更に、栓の直径等もプロファイルから容易に観測することができるので、直径を特徴量として利用することも可能である。上記実施形態においては、各採血管に対応するプロファイルにおいてまず中心線を特定し、それを座標原点として利用しつつ波形解析を行ったので、仮に試験管の位置にずれがあっても解析精度の低下を防止できるという利点がある。同様に、採血管が少々傾いていても、上述したプロセスをそのまま実行して正確な判定を行えるという利点がある。もっとも、採血管が大きく傾いていたり、プロファイルが取得できない程度、直交方向に傾いているような場合には、エラー処理を適用するようにしてもよいし、また光ビームを直交方向にスキャンする方式を併用するようにしてもよい。
【0047】
上述した図4に示す判定プロセスにおいて十分な判別を行えない場合には、更に図16及び図17に示すような手法を利用するようにしてもよい。図16には、ある採血管においてのプロファイル112が示されている。これに対して強い平滑化処理をかけることにより、図17に示すようなプロファイル112Aを得ることができる。すなわち中心線71の両側に立ち上がっている矩形状の突出部分に丸みを持たせてそれらのピークを特定できるようにしたものである。ここでは、2つのピークP1及びP2が特定されており、それらの間隔ΔPは栓の種別の判定にあたっての1つの特徴量をなすものであると認められるため、それをさらに利用して、あるいは上述したいずれかの特徴例に代えて利用することにより、より高精度に栓の種別を判定することが可能である。また、ピーク位置における高さのずれ等から、上述したシール栓の縁部分に存在するタブの折れ曲がりに起因するエラー要因を除外するようにしてもよい。
【0048】
以上説明した本実施形態の判別方法よれば、光ビームを照射して高さ計測を行うだけで、ラックの搬送と相まって一次元のプロファイルを取得でき、そのプロファイルに対するソフトウェア解析により、各採血管単位で具体的に種別を特定することが可能である。そのように特定された情報を後段の開栓処理等の動作条件に反映させれば、検体前処理装置全体としての動作効率や信頼性を著しく高めることができるという利点がある。従来においては、上述したような多数の採血管が混載されたようなラックを受け入れることが困難であった検体前処理装置においても、上流側に上述した検体容器判別装置を組み込めば、そのような混載状態にあるラックに対して検体前処理を円滑に遂行させることができるという利点が得られる。上述した実施形態における光ビームに代えて上方からあるいは側面から採血管を撮像し、その撮像結果である画像の解析により種別の判定を行うことも可能であるが、そのような場合にはどうしてもコストアップという問題が生じやすい。上記構成によれば、一次元の光ビームの走査だけで簡便且つ迅速に種別の判定を行えるので、実用性の高い判別装置を構成できるという利点が得られる。
【図面の簡単な説明】
【0049】
【図1】本発明に係る検体容器判別装置の好適な実施形態を示す要部構成図である。
【図2】光ビームのスキャン経路を説明するための図である。
【図3】ラック上に搭載された複数の採血管とそれらに対応するプロファイル等を示す説明図である。
【図4】本実施形態に係る種別判定方法の全体的な流れを説明するための概念図である。
【図5】特徴量としての平均値及びばらつきを説明するための図である。
【図6】第1解析工程において判定される条件を説明するための図である。
【図7】図6に示した複数の条件の相互関係を説明するための図である。
【図8】他の特徴量としてのピーク値を説明するための図である。
【図9】他の特徴量としてのピーク値を説明するための図である。
【図10】第2解析工程において判定される条件を説明するための説明図である。
【図11】図10に示した複数の条件の相互関係を説明するための図である。
【図12】更に他の特徴量としての中央部分の平均値及び周辺部分の平均値を説明するための図である。
【図13】更に他の特徴量としての中央部分の平均値及び周辺部分の平均値を説明するための図である。
【図14】更に他の特徴量としての中央部分の平均値及び周辺部分の平均値を説明するための図である。
【図15】第3解析工程において判定される条件を説明するための図である。
【図16】採血管のプロファイルを示す図である。
【図17】図16に示したプロファイルに対して平滑化処理を適用した後のプロファイルを示すものであり、2つのピークの特定を説明するための図である。
【符号の説明】
【0050】
10 ラック、12 採血管、14 本体、16 栓、20 光計測部、38 演算制御部、40 距離算出部、42 解析部、44 動作制御部。
【特許請求の範囲】
【請求項1】
ラックに保持された検体容器に対してその上方から光ビームの走査を行うことにより、前記検体容器について一次元の高さプロファイルを取得する計測手段と、
前記検体容器について取得された高さプロファイルを解析することにより、前記検体容器の種別を判別する判別手段と、
を含むことを特徴とする検体容器判別装置。
【請求項2】
請求項1記載の装置において、
前記判別手段は、少なくとも、前記各検体容器に装着された栓の種別を判別する、ことを特徴とする検体容器判別装置。
【請求項3】
請求項2記載の装置において、
前記判別手段は、更に前記検体容器の本体の種別を判別し、
前記判別手段により、前記検体容器の種別として、前記本体の種別と栓の種別との組み合わせが判別される、ことを特徴とする検体容器判別装置。
【請求項4】
請求項1〜3のいずれか1項に記載の装置において、
前記判別手段は、
前記高さプロファイル上において検体容器中心軸に相当する基準座標を特定する基準座標特定手段と、
前記高さプロファイルに対して波形解析を行う手段であって、前記基準座標を利用して波形解析を行う機能を有する波形解析手段と、
前記高さプロファイルの波形解析結果に基づいて前記検体容器の種別を判別する種別判別手段と、
を含むことを特徴とする検体容器判別装置。
【請求項5】
請求項4記載の装置において、
前記波形解析手段は、前記基準座標を原点として水平方向に広がる第1参照領域内の高さ平均値と、前記基準座標を原点として水平方向に広がる第2参照領域内の凹凸程度を示す値と、を求める、
ことを特徴とする検体容器判別装置。
【請求項6】
請求項4又は5記載の装置において、
前記波形解析手段は、前記高さプロファイル上の高さピークを特定する、
ことを特徴とする検体容器判別装置。
【請求項7】
請求項4〜6のいずれか1項に記載の装置において、
前記波形解析手段は、前記基準座標を原点として水平方向に広がる中央部波形部分についての波形特徴量と、前記基準座標を原点として水平方向に広がる周辺部波形部分についての波形特徴量と、を求める、
ことを特徴とする検体容器判別装置。
【請求項8】
請求項4〜7のいずれか1項に記載の装置において、
前記波形解析手段は、前記高さプロファイルにおける2つのピーク間の距離を求める、
ことを特徴とする検体容器判別装置。
【請求項9】
請求項1〜8のいずれか1項に記載の装置において、
前記判別手段は、更に、検体容器の不存在、及び、栓の不存在を判別する、
ことを特徴とする検体容器判別装置。
【請求項10】
請求項1〜9のいずれか1項に記載のラック搬送装置において、
前記計測手段は、ラック搬送路の上方に設けられて前記測定ビームを下向きに形成する非接触式の距離センサを有し、
前記ラックの搬送により、前記測定ビームが前記検体容器の上面中央部を相対的に横切るように走査される、
ことを特徴とする検体容器判別装置。
【請求項11】
ラックに保持された採血管に対してその上方から光ビームの走査を行うことにより、前記採血管について一次元の高さプロファイルを取得する計測工程と、
前記採血管について取得された高さプロファイルを解析することにより複数の波形特徴量を求める波形解析工程と、
前記複数の波形特徴量に基づいて前記採血管における本体の種別及び栓の種別の組み合わせを判別する判別工程と、
前記判別された本体の種別及び栓の種別の組み合わせに応じて、開栓動作、分注動作、及び、閉栓動作の少なくとも1つの動作条件を変更する制御工程と、
を含むことを特徴とする検体前処理方法。
【請求項1】
ラックに保持された検体容器に対してその上方から光ビームの走査を行うことにより、前記検体容器について一次元の高さプロファイルを取得する計測手段と、
前記検体容器について取得された高さプロファイルを解析することにより、前記検体容器の種別を判別する判別手段と、
を含むことを特徴とする検体容器判別装置。
【請求項2】
請求項1記載の装置において、
前記判別手段は、少なくとも、前記各検体容器に装着された栓の種別を判別する、ことを特徴とする検体容器判別装置。
【請求項3】
請求項2記載の装置において、
前記判別手段は、更に前記検体容器の本体の種別を判別し、
前記判別手段により、前記検体容器の種別として、前記本体の種別と栓の種別との組み合わせが判別される、ことを特徴とする検体容器判別装置。
【請求項4】
請求項1〜3のいずれか1項に記載の装置において、
前記判別手段は、
前記高さプロファイル上において検体容器中心軸に相当する基準座標を特定する基準座標特定手段と、
前記高さプロファイルに対して波形解析を行う手段であって、前記基準座標を利用して波形解析を行う機能を有する波形解析手段と、
前記高さプロファイルの波形解析結果に基づいて前記検体容器の種別を判別する種別判別手段と、
を含むことを特徴とする検体容器判別装置。
【請求項5】
請求項4記載の装置において、
前記波形解析手段は、前記基準座標を原点として水平方向に広がる第1参照領域内の高さ平均値と、前記基準座標を原点として水平方向に広がる第2参照領域内の凹凸程度を示す値と、を求める、
ことを特徴とする検体容器判別装置。
【請求項6】
請求項4又は5記載の装置において、
前記波形解析手段は、前記高さプロファイル上の高さピークを特定する、
ことを特徴とする検体容器判別装置。
【請求項7】
請求項4〜6のいずれか1項に記載の装置において、
前記波形解析手段は、前記基準座標を原点として水平方向に広がる中央部波形部分についての波形特徴量と、前記基準座標を原点として水平方向に広がる周辺部波形部分についての波形特徴量と、を求める、
ことを特徴とする検体容器判別装置。
【請求項8】
請求項4〜7のいずれか1項に記載の装置において、
前記波形解析手段は、前記高さプロファイルにおける2つのピーク間の距離を求める、
ことを特徴とする検体容器判別装置。
【請求項9】
請求項1〜8のいずれか1項に記載の装置において、
前記判別手段は、更に、検体容器の不存在、及び、栓の不存在を判別する、
ことを特徴とする検体容器判別装置。
【請求項10】
請求項1〜9のいずれか1項に記載のラック搬送装置において、
前記計測手段は、ラック搬送路の上方に設けられて前記測定ビームを下向きに形成する非接触式の距離センサを有し、
前記ラックの搬送により、前記測定ビームが前記検体容器の上面中央部を相対的に横切るように走査される、
ことを特徴とする検体容器判別装置。
【請求項11】
ラックに保持された採血管に対してその上方から光ビームの走査を行うことにより、前記採血管について一次元の高さプロファイルを取得する計測工程と、
前記採血管について取得された高さプロファイルを解析することにより複数の波形特徴量を求める波形解析工程と、
前記複数の波形特徴量に基づいて前記採血管における本体の種別及び栓の種別の組み合わせを判別する判別工程と、
前記判別された本体の種別及び栓の種別の組み合わせに応じて、開栓動作、分注動作、及び、閉栓動作の少なくとも1つの動作条件を変更する制御工程と、
を含むことを特徴とする検体前処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2009−204360(P2009−204360A)
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願番号】特願2008−45078(P2008−45078)
【出願日】平成20年2月26日(2008.2.26)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願日】平成20年2月26日(2008.2.26)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
[ Back to top ]