
検出装置、液体吐出装置、及び液体吐出面の異常検出方法
【課題】厳密な焦点合わせを必要とせず、検出素子と液体吐出面との距離が変動した場合でも、液体吐出面の異常の有無を検出しうる検出装置、液体吐出装置、及び液体吐出面の検出方法を提供する。
【解決手段】インクジェットヘッド16の液体吐出面16Aに対して斜め方向から対向し、合焦対象面が液体吐出面16Aと交差するように配置された撮像部140とインクジェットヘッド16とを相対的に移動させて液体吐出面16Aを撮像する際に、液体吐出面16Aに対する撮像部140の撮像領域に合焦対象領域を設定し、撮像部140を液体吐出面16Aに合焦させ、撮像部160を液体吐出面16Aに合焦させている状態を維持しつつ、インクジェットヘッド16と撮像部140とを相対的に移動させながら所定の時間間隔で液体吐出面16Aを撮像し、合焦対象領域の撮像データから液体吐出面16Aの異常情報を生成し、液体吐出面16Aの異常情報を出力する。
【解決手段】インクジェットヘッド16の液体吐出面16Aに対して斜め方向から対向し、合焦対象面が液体吐出面16Aと交差するように配置された撮像部140とインクジェットヘッド16とを相対的に移動させて液体吐出面16Aを撮像する際に、液体吐出面16Aに対する撮像部140の撮像領域に合焦対象領域を設定し、撮像部140を液体吐出面16Aに合焦させ、撮像部160を液体吐出面16Aに合焦させている状態を維持しつつ、インクジェットヘッド16と撮像部140とを相対的に移動させながら所定の時間間隔で液体吐出面16Aを撮像し、合焦対象領域の撮像データから液体吐出面16Aの異常情報を生成し、液体吐出面16Aの異常情報を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は検出装置、液体吐出装置、及び液体吐出面の異常検出方法に係り、特にインクジェットヘッドの液体吐出面の異常検出技術に関する。
【背景技術】
【0002】
インクジェット記録装置に具備されるインクジェットヘッドは、インク吐出面(液体吐出面)に液状のインクや固化したインクなどの汚れが付着すると、吐出性能を低下させてしまうことがありうる。例えば、ノズル開口の近傍に汚れが付着すると、吐出量の減少や飛翔方向の曲がりが発生して、ドットサイズの異常やドットの形成位置の異常の原因となる。
【0003】
インクジェットヘッドのインク吐出性能の低下を回避するために、インクジェットヘッドのインク吐出面の定期的な洗浄が実行され、インク吐出面から汚れが除去されている。例えば、インク吐出面の洗浄処理前にインク吐出面と光学センサとを相対的に走査させながらインク吐出面の汚れを検出し、その検出結果からインク吐出面の汚れの有無を把握して、この検出結果を反映させることで、インク吐出面の洗浄処理が効率よく実行される。
【0004】
特許文献1は、待機領域に設けられた撮像手段を用いてノズル配列面を撮像し、撮像結果に基づいて吐出不良の有無を判断するように構成されたインクジェット記録装置を開示している。特許文献1には、ライン型のインクジェットヘッドの吐出不良を検出する際に、インクジェットヘッドを長手方向に退避させて撮像手段を同方向に移動させる構成が開示されている。
【0005】
特許文献2は、記録ヘッドをフェイス面から観察するCCDカメラを備え、CCDカメラから得た画像を解析してフェイス面における混色の有無を判断するように構成されたインクジェット記録装置を開示している。特許文献2は、フェイス面表面に焦点を合わせてフェイス面に付着した液体を撮像する旨、フェイス面をもれなく撮像する際に、被写界深度が浅い場合にはピントを振って撮像する旨を開示している。
【0006】
特許文献3は、走査しながら撮像を行うカメラを開示している。特許文献3には、image planeとObject planeが平行にならない旨の技術課題が開示され、その解決手段として距離測定システムとゴニオメータで平行を出しながら、CCDカメラでの検査を行う旨が開示されている。
【0007】
特許文献4は、カメラの液体吐出ヘッドに対する角度を調整しつつ、該カメラを支持する構成が開示されている。特許文献4は、カメラによってメニスカス、飛翔液滴の静止画又は動画を撮影し、撮像された画像を解析して液滴の吐出異常を検出する旨を開示している。
【0008】
特許文献5は、各ノズル孔の位置情報及びノズル孔に対するフォーカシングの距離情報を取得し、各ノズル孔の内部を連続的に画像認識して異物の有無を検出するように構成されたノズルプレートの検査装置を開示している。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第3929049号公報
【特許文献2】特開2006−297772号公報
【特許文献3】米国特許公報第6525810号明細書
【特許文献4】特開2007−229928号公報
【特許文献5】特開2010−139357号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、インクジェットヘッドのインク吐出面とセンサの検出面(撮像素子の受光面)との平行状態を正確に保ちつつ、インク吐出面と検出面とを一定の速度で相対移動させることは困難であり、インク吐出面と検出面との距離の変動や相対速度の変動が生じると、検出結果に影響を与えてしまう。
【0011】
特に、フルライン型のインクジェットヘッドなど、大型のインクジェットヘッドを移動させながら、インク吐出面と検出面とを常に平行に保つことは難しい。センサとしてCCD固体撮像素子などの撮像素子を用いてインク吐出面を撮像する(画像を取得する)場合には、撮像により得られた画像の一部で焦点が合わないことが生じて、得られた画像からインク吐出面の汚れの有無を把握できないこともありうる。
【0012】
適宜焦点合わせを実行しながら連続撮像が行われる態様では、上記した課題を解決することができるものの、焦点合わせの際にインクジェットヘッドとセンサとの相対移動を停止させる必要がある。焦点合わせの回数が多くなるほどインクジェットヘッドとセンサとの相対移動を停止させる回数が多くなり、インク吐出面の検出に費やす時間が増加してしまう。
【0013】
特許文献1から5に開示された構成は、焦点合わせを行いつつ検出が行われるものであり、焦点がずれた場合にはインク吐出面に付着した汚れが正確に検出されないことが懸念される。一方、焦点合わせを実行する回数が増えるほど、インク吐出面の検出に費やす時間が長くなってしまう。
【0014】
また、特許文献4に開示された構成は、光路長の調整や焦点合わせが困難であり、装置構成が複雑になることが懸念される。特許文献5に開示された構成は、フォーカシングの距離を別途計測しているので、構成が複雑になってしまう。
【0015】
本発明はこのような事情に鑑みてなされたもので、厳密な焦点合わせを必要とせず、検出素子と液体吐出面との距離が変動した場合でも、液体吐出面の異常の有無を検出しうる検出装置、液体吐出装置、及び液体吐出面の検出方法を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記目的を達成するために、本発明に係る検出装置は、インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、前記インクジェットヘッドと前記撮像手段とを相対的に移動させる相対移動手段と、前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、を備えている。
【発明の効果】
【0017】
本発明によれば、インクジェットヘッドの液体吐出面の直下を避けて配置される撮像出により、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する際に、撮像手段により得られる撮像データの中から、ピントが合っている画像が得られる領域である合焦対象領域が設定され、撮像手段が合焦設定を維持しつつ、インクジェットヘッドと撮像手段とを相対的に移動させて、所定の時間間隔で液体吐出面を撮像するので、液体吐出面における撮像手段のピントが合っている画像が得られる領域を所定の時間間隔で撮像することができ、撮像手段の合焦設定を変更することなく液体吐出面の全面にわたる撮像データを取得することができる。
【0018】
また、合焦対象領域の撮像データが抽出され、この撮像データに基づいて液体吐出面の異常が検出されるので、撮像手段の撮像可能領域の全域にピントを合わせるための液体吐出面と撮像手段とを平行にするための精密な調整が不要となる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態に係るインクジェット記録装置の概略構成を示す全体構成図
【図2】図1に示すインクジェットヘッドの構造例を示す透視平面図
【図3】図1に示すインクジェット記録装置のメンテナンス処理部の概略構成を示すブロック図
【図4】図1に示すインクジェット記録装置の制御系の概略構成を示すブロック図
【図5】図3に示す検出装置の検出範囲を示す説明図、a:インクジェットヘッドを搬送方向と直交する方向から見た図、b:メンテナンス位置側から見た図、c:インク吐出面側から見た図
【図6】図3に示す検出装置のブロック図
【図7】図3に示す検出装置に具備されるCCDイメージセンサの概略構成図
【図8】図7に示すCCDイメージセンサの信号処理部の構成を示すブロック図
【図9】インク吐出面における合焦対象領域の説明図
【図10】撮像データの合成処理の説明図
【図11】合焦対象領域の画像データを示す説明図
【図12】図11に示す合焦対象領域の画像の合成処理の説明図、a:エッジ検出処理、b:シフト処理、c:拡大、縮小処理
【図13】a:合焦対象位置に平行な線分を示す説明図、b:該線分上の撮像データを示す説明図
【図14】合焦対象領域に設定された線分の撮像データをシフトさせる処理の説明図
【図15】インク吐出面の形成されたマーキングを示すインク吐出面の平面図
【図16】合焦対象領域の撮像データに基づくインク吐出面の異常検出の説明図
【図17】本発明に係るインク吐出面の異常検出の制御の流れを示すフローチャート
【図18】インク吐出面の異常検出結果を払拭処理に反映させる例の説明図
【図19】本発明に係るインク吐出面の異常検出を含むインクジェットヘッドのメンテナンス処理の制御の流れを示すフローチャート
【図20】他の装置構成への応用例に係るインクジェット記録装置の概略構成を示す全体構成図
【図21】図20に示すインクジェット記録装置におけるインク吐出面の異常検出の説明図、a:検出装置が1つの場合、b:検出装置が2つの場合
【図22】1つの検出装置を用いて、複数のインクジェットヘッドのインク吐出面の異常検出を行う場合の課題の説明図
【図23】1つの検出装置を用いて、複数のインクジェットヘッドのインク吐出面の異常検出を行う場合の他の課題の説明図
【図24】望遠マクロ系の撮像部を備えた検出装置によるインク吐出面の異常検出の説明図
【図25】図24に示す検出装置により得られる画像の説明図
【発明を実施するための形態】
【0020】
以下、添付図面に従って本発明を実施するための形態について詳説する。
【0021】
〔インクジェット記録装置の全体構成〕
図1は、本発明に係るインクジェット記録装置10の全体構成図である。図1に示すインクジェット記録装置10は、オンデマンド型インクジェット記録装置であり、記録媒体12を保持して搬送する記録媒体搬送部14と、記録媒体搬送部14に保持された記録媒体12に対して、K(黒)、C(シアン)、M(マゼンタ)、Y(イエロー)に対応するカラーインクを吐出させるインクジェットヘッド16K,16C,16M,16Yを含む印字部17と、を含んで構成されている。
【0022】
記録媒体搬送部14は、記録媒体12が保持される記録媒体保持領域に多数の吸着穴(不図示)が設けられた無端状の搬送ベルト18と、搬送ベルト18が巻き掛けられる搬送ローラ(駆動ローラ20、従動ローラ22)と、記録媒体保持領域の搬送ベルト18の裏側(記録媒体12が保持される記録媒体保持面と反対側の面)に設けられ、記録媒体保持領域に設けられた不図示の吸着穴にと連通しているチャンバー24と、チャンバー24に負圧を発生させる真空ポンプ26と、を含んでいる。
【0023】
また、記録媒体搬送部14は、筐体フレーム(図1中不図示、図3に符号15を付して図示)に収納されており、該筐体フレームに固定支持される。
【0024】
記録媒体12が搬入される搬入部28には、記録媒体12の浮きを防止するための押圧ローラ30が設けられるとともに、記録媒体12が排出される排出部32にもまた、押圧ローラ34が設けられている。
【0025】
搬入部28から搬入された記録媒体12は、記録媒体保持領域に設けられた吸着穴から負圧が付与され、搬送ベルト18の記録媒体保持領域に吸着保持される。
【0026】
記録媒体12の搬送路上には、印字部17の前段側(記録媒体搬送方向上流側)に、記録媒体12の表面温度を所定範囲に調整するための温度調節部36が設けられるとともに、印字部17の後段側(記録媒体搬送方向下流側)に、記録媒体12上に記録された画像を読み取る読取装置(読取センサ)38が設けられている。
【0027】
搬入部28から搬入された記録媒体12は、搬送ベルト18の記録媒体保持領域に吸着保持され、温度調節部36による温度調節処理が施された後に、印字部17において画像記録が行われる。
【0028】
図1に示すように、インクジェットヘッド16K,16C,16M,16Yは、記録媒体搬送方向の上流側からこの順番で配置されている。記録媒体12がインクジェットヘッド16K,16C,16M,16Yの直下を通過する際に、記録媒体12に対してKCMYの各色のインクを吐出させて、所望のカラー画像が形成される。
【0029】
なお、印字部17は上述した形態に限定されない。例えば、LC(ライトシアン)やLM(ライトマゼンタ)に対応するインクジェットヘッド16LC,16LMを具備してもよい。また、インクジェットヘッド16K,16C,16M,16Yの配置順も適宜変更可能である。
【0030】
画像記録がされた記録媒体12は、読取装置38によって記録画像(テストパターン)が読み取られ、不図示の定着処理部による必要な定着処理が施された後に、排出部32から排出される。読取装置38の読取結果は、インクジェットヘッド16K,16C,16M,16Yの吐出異常の判断に用いられる。
【0031】
図1に図示は省略するが、インクジェット記録装置10はインクジェットヘッド16K,16C,16M,16Yにメンテナンス処理を施すメンテナンス処理部(図3に符号60を付して図示)を備えている。メンテナンス処理部は、印字部17の記録媒体搬送方向と直交する方向について、印字部17から離れた位置に配置される(図3参照)。
【0032】
図1に示すインクジェット記録装置10は、不図示のインク供給部を具備している。インク供給部は、インクジェットヘッド16K,16C,16M,16Yに供給されるインクを貯蔵するインクタンクを色ごと(ヘッドごと)に備えている。色ごとのインクタンクのそれぞれとインクジェットヘッド16K,16C,16M,16Yとは、不図示のインク供給路により連通されている。
【0033】
〔印字部の構成〕
図2は、印字部17に具備されるインクジェットヘッド16K,16C,16M,16Yの構造例を示す透視平面図(インク吐出面の反対側面から見た図)である。図1に図示したインクジェットヘッド16K,16C,16M,16Yは同一の構造を適用することができるので、ここではインクジェットヘッド16K,16C,16M,16Yに共通の符号16を付して図示するものとする。
【0034】
インクジェットヘッド16は、記録媒体12の主走査方向Mにおける全長を超える長さにわたって、複数のノズル50及び圧力室52が含まれる吐出素子54が配置されたフルライン型のインクジェットヘッドである。
【0035】
フルライン型のインクジェットヘッド16と記録媒体12とを相対的に一回だけ移動させるシングルパス方式により、記録媒体12全域にわたって記録画像を記録することができる。
【0036】
図2に示すインクジェットヘッド16は、主走査方向Mに沿う行方向、及び主走査方向M及び副走査方向Sと直交しない斜めの列方向に沿って複数のノズル50(吐出素子54)がマトリクス配置された構造を有している。
【0037】
図2に示すようにノズル50をマトリクス配置させることで、主走査方向Mの実質的なノズル配置密度が高密度化される。なお、本発明に適用可能なインクジェットヘッドのノズル配置は図2に図示したマトリクス配置に限定されない。
【0038】
例えば、インクジェットヘッド16の長手方向に沿って複数のノズル50を配置したノズル列を一列有する態様や、同方向に複数のノズル50を二列の千鳥配置させる態様などを適用することができる。
【0039】
インクジェットヘッド16の吐出方式は、圧電素子のたわみ変形を利用する圧電方式や、インクの膜沸騰現象を利用するサーマル方式などの各種吐出方式が適用可能である。圧電方式が適用されるインクジェットヘッド16は、インクを吐出させるノズル50と、ノズル50と連通する圧力室52と、圧力室52の少なくとも一壁面に設けられる圧電素子と、を備えている。
【0040】
圧電素子は、上部電極及び下部電極に圧電体がはさまれた構造を有し、上部電極と下部電極との間に駆動電圧を印加することでたわみ変形が生じ、圧電素子のたわみ変形により圧力室52が変形することで、圧力室52の内部に収容されているインクがノズル50から吐出される。
【0041】
また、サーマル方式が適用されるインクジェットヘッドは、圧力室(液室)52の内部に収容されるインクを加熱するヒータを備え、圧力室52の内部のインクを瞬間的に加熱することで気泡を発生させ、ノズル50からインクを吐出させている。
【0042】
〔メンテナンス処理部の説明〕
図3は、図1に示すインクジェット記録装置10のメンテナンス処理部60の概略構成図であり、メンテナンス処理部60と印字部17との配置関係が図示されている。
【0043】
図3に示すように、メンテナンス処理部60は、インクジェットヘッド16(16K,16C,16M,16Y)を記録媒体搬送部14上の画像形成位置から、記録媒体12の搬送方向と略直交する方向に水平移動させた位置に配置されている。
【0044】
メンテナンス処理部60は、インクジェットヘッド16のインク吐出面16Aに洗浄液を付与する洗浄装置62と、インクジェットヘッド16に対してパージ処理又は吸引処理(ノズル内のインクの排出処理)を施すキャップ部64と、パージ処理又は吸引処理後のインクジェットヘッド16のインク吐出面16Aに対して払拭処理を施すブレード66を具備する払拭処理部68と、インクジェットヘッド16のインク吐出面16Aの異常を検出する検出装置70と、を備えて構成されている。
【0045】
なお、洗浄装置62と払拭処理部68とを一体に構成してもよいし、洗浄装置62、払拭処理部68、及びキャップ部64を一体に構成してもよい。
【0046】
図3では、1ヘッド分に対応するメンテナンス処理部60の構成が図示されているが、洗浄装置62、キャップ部64、払拭処理部68及び検出装置70はインクジェットヘッド16ごとに、インクジェットヘッド16の数だけ設けられている。なお、複数の洗浄装置62等を一体に構成することも可能である。
【0047】
インクジェットヘッド16を記録媒体搬送部14の直上の画像形成位置(画像形成位置に位置するインクジェットヘッド16を破線により図示)からメンテナンス位置へ移動させるには、インクジェットヘッド16を記録媒体搬送部14上の画像形成位置から一旦上方へ退避させ、さらに、記録媒体12の搬送方向と直交する方向へ水平移動させる。
【0048】
インクジェットヘッド16を上下方向及び水平方向へ移動させる移動機構には、周知の水平搬送機構、上下搬送機構を適用することができる。
【0049】
「メンテナンス位置」とは、検出装置70の処理領域、払拭処理部68の処理領域、洗浄装置62の処理領域、及びキャップ部64の処理領域を含む概念である。なお、図3では、キャップ部64の処理領域に位置するインクジェットヘッド16が一点破線によって図示されている。
【0050】
インクジェットヘッド16が洗浄装置62の処理領域に到達すると、洗浄装置62を上方へ移動させて(又は、インクジェットヘッド16を下方へ移動させて)、インク吐出面16Aの洗浄処理が実行される。
【0051】
インク吐出面16Aの洗浄処理が終了すると、インクジェットヘッド16をキャップ部64の処理領域へ移動させ、インク吐出面16Aにキャップ部64を密着させて、吸引処理又はパージ処理が実行される。
【0052】
キャップ部64は、排出流路72を介して廃インクタンク74と連通され、排出流路72には、ポンプ76が設けられる。インク吐出面16Aにキャップ部64を密着させ状態でポンプ76を動作させると、ノズルを介してインクジェットヘッド16内のインクが吸引される。
【0053】
このようにして、インクジェットヘッド16のパージ又は吸引処理が終了すると、インクジェットヘッド16は画像形成位置に移動する。
【0054】
検出装置70は、インクジェットヘッド16のインク吐出面16Aをインク吐出面16Aに対向する斜め方向から撮像するCCDイメージセンサ(図3中不図示、図7に符号160を付して図示)を具備する撮像部(図3中不図示、図6に符号140を付して図示)を備えている。インクジェット記録装置10は、撮像部から得られる撮像データ(静止画の撮像データ)に基づく検出装置70の検出結果をインクジェットヘッド16のメンテナンス処理に反映させている。
【0055】
検出装置70は、撮像部の撮像面が画像形成位置の方向を向いているので、記録媒体搬送部14を収納している筐体フレーム15やインクジェットヘッド16から飛散されたインクミストによる汚染を防止するために、撮像部の撮像面が筐体フレーム15から十分に離れた位置に配置される。
【0056】
なお、撮像部の撮像面がメンテナンス処理部60の方向を向いている場合には、上記したインクミストの影響を受けにくいので、検出装置70を筐体フレーム15のより近い位置に配置することができるので、装置の小型化が可能となる。
【0057】
〔制御系の説明〕
図4は、インクジェット記録装置10の制御系の概略構成を示すブロック図である。同図に示すように、インクジェット記録装置10は、通信インターフェース100、システム制御部102、搬送制御部104、画像処理部106、ヘッド駆動部108を備えるとともに、画像メモリ110、ROM112等を備えている。
【0058】
通信インターフェース100は、ホストコンピュータ114から送られてくるラスター画像データを受信するインターフェース部である。通信インターフェース100は、USB(Universal Serial Bus)などのシリアルインターフェースを適用してもよいし、セントロニクスなどのパラレルインターフェースを適用してもよい。通信インターフェース100は、通信を高速化するためのバッファメモリ(不図示)を搭載してもよい。
【0059】
システム制御部102は、中央演算処理装置(CPU)及びその周辺回路等から構成され、所定のプログラムに従ってインクジェット記録装置10の全体を制御する制御装置として機能するとともに、各種演算を行う演算装置として機能し、さらに、画像メモリ110及びROM112のメモリコントローラとして機能する。
【0060】
すなわち、システム制御部102は、通信インターフェース100、搬送制御部104等の各部を制御し、ホストコンピュータ114との間の通信制御、画像メモリ110及びROM112の読み書き制御等を行うとともに、上記の各部を制御する制御信号を生成する。
【0061】
ホストコンピュータ114から送出された画像データ(記録画像のデータ)は通信インターフェース100を介してインクジェット記録装置10に取り込まれ、画像処理部106によって所定の画像処理が施される。
【0062】
画像処理部106は、画像データから印字制御用の信号を生成するための各種加工、補正などの処理を行う信号(画像)処理機能を有し、生成した印字データ(ドットデータ)をヘッド駆動部108に供給する制御部である。
【0063】
画像処理部106において所要の信号処理が施されると、該印字データ(ハーフトーン画像データ)に基づいて、ヘッド駆動部108を介してインクジェットヘッド16の吐出液滴量(打滴量)や吐出タイミングの制御が行われる。
【0064】
これにより、所望のドットサイズやドット配置が実現される。なお、図4に示すヘッド駆動部108には、インクジェットヘッド16の駆動条件を一定に保つためのフィードバック制御系を含んでいてもよい。
【0065】
搬送制御部104は、画像処理部106により生成された印字データに基づいて記録媒体12(図1参照)の搬送タイミング及び搬送速度を制御する。図4における搬送駆動部116は、記録媒体12を搬送する記録媒体搬送部14の駆動ローラ20(22)を駆動するモータが含まれており、搬送制御部104は該モータのドライバーとして機能している。
【0066】
画像メモリ(一時記憶メモリ)110は、通信インターフェース100を介して入力された画像データを一旦格納する一時記憶手段としての機能や、ROM112に記憶されている各種プログラムの展開領域及びCPUの演算作業領域(例えば、画像処理部106の作業領域)としての機能を有している。画像メモリ110には、逐次読み書きが可能な揮発性メモリ(RAM)が用いられる。
【0067】
ROM112は、システム制御部102のCPUが実行するプログラムや、装置各部の制御に必要な各種データ、制御パラメータなどが格納されており、システム制御部102を通じてデータの読み書きが行われる。ROM112は、半導体素子からなるメモリに限らず、ハードディスクなど磁気媒体を用いてもよい。また、外部インターフェースを備え、着脱可能な記憶媒体を用いてもよい。
【0068】
パラメータ記憶部118は、インクジェット記録装置10の動作に必要な各種制御パラメータが記憶されている。システム制御部102は、制御に必要なパラメータを適宜読み出すとともに、必要に応じて各種パラメータの更新(書換)を実行する。
【0069】
プログラム格納部120は、インクジェット記録装置10を動作させるための制御プログラムが格納されている記憶手段である。システム制御部102(又は装置各部)は、装置各部の制御を実行する際にプログラム格納部120から必要な制御プログラムが読み出され、該制御プログラムは適宜実行される。
【0070】
表示部122は、システム制御部102から送出される各種情報を表示する手段であり、LCDモニタなどの汎用ディスプレイ装置が適用される。なお、表示部122の表示形態には、ランプの点灯(点滅、消灯)を適用してもよい。また、スピーカーなどの音(音声)出力手段を備えてもよい。
【0071】
入力インターフェース(I/F)124は、キーボード、マウス、ジョイスティックなどの情報入力手段が適用される。入力インターフェース124を介して入力された情報は、システム制御部102へ送出される。
【0072】
メンテナンス制御部126は、システム制御部102から送出された指令信号に基づいて、図3に図示したメンテナンス処理部60の各部の動作を制御する。例えば、インクジェットヘッド16の上下移動、水平移動、洗浄装置62によるインク吐出面16Aへの洗浄液付与、キャップ部64による予備吐出、吸引、ブレード66のインク吐出面16Aへの当接及び離間などを制御する。
【0073】
異常検出部128は、検出装置70から得られた検出結果に基づいてインクジェットヘッド16のインク吐出面16Aの異常の有無を判断する。インクジェットヘッド16のインク吐出面16Aの異常とは、インク吐出面16Aへの汚れの付着、傷の発見等が挙げられる。インク吐出面16Aの異常情報(異常の有無、異常の位置)はシステム制御部102へ送られる。
【0074】
システム制御部102がインク吐出面16Aの異常情報を取得すると、該異常情報は所定のメモリへ記憶されるとともに、メンテナンス制御部126送られる。メンテナンス制御部126は、インク吐出面16Aの異常情報をメンテナンス処理部60よるインクジェットヘッド16のメンテナンス処理に反映させる。
【0075】
〔インク吐出面の異常検出の説明〕
次に、検出装置70によるインク吐出面16Aの異常検出について詳細に説明する。図5は、図3に示す検出装置70の検出範囲の説明図である。
【0076】
図5(a)は、画像形成位置からメンテナンス位置へ移動するインクジェットヘッド16(16K,16C,16M,16Y)を搬送方向と直交する方向から見た図であり、左側が画像形成位置であり、右側がメンテナンス位置である。図5(b)は、メンテナンス位置側から見たインクジェットヘッド16であり、紙面を貫く方向がインクジェットヘッド16の移動方向である。図5(c)は、インク吐出面16A側から見た図であり、同図の下側がメンテナンス位置である。
【0077】
図5(a)から(c)に示すように、検出装置70(撮像部140)はインクジェットヘッド16のインク吐出面16Aの鉛直方向(水平面に対して直交する方向)の直下(図5(b)において二点破線により図示した領域)を避けて配置されており、インクジェットヘッド16のインク吐出面16Aやフレームから滴下するインクによる撮像部140の撮像面の汚染が回避されている。
【0078】
すなわち、検出装置70(撮像部140)の光軸(図5(c)に符号140Aを付して図示)が、インクジェットヘッド16のインク吐出面16Aの法線に対して非平行となるように検出装置70が配置されている。
【0079】
また、検出装置70はインク吐出面16Aの汚れや傷を把握できる程度の撮像データを取得する必要があるので、インク吐出面16Aが通過する経路の近接位置に配置されている。
【0080】
図5(a)から(c)に示す検出装置70は、インク吐出面16Aに対して斜め方向から撮像面を対向させるとともに、インクジェットヘッド16の移動方向に対して斜め方向からインク吐出面16Aに撮像面を対向させて、インク吐出面16Aの撮像データを取得するように配置されている。
【0081】
一方、検出装置70は一回の撮像でインク吐出面16Aの全面にわたり十分な精度の撮像データを取得できる撮像可能領域(撮像画角)及び撮影精度を有していない場合に対応するために、インク吐出面16Aとの相対的な位置を変えながら位置ごとに撮像を行うことで、インク吐出面16Aの全面の撮像データを取得している。
【0082】
なお、インク吐出面16Aの汚れはノズルが配置されるノズル配置領域に付着する可能性が高いので、検出装置70は少なくともインク吐出面16Aのノズルが配置されるノズル配置領域の全域から撮像データを取得できればよい。もちろん、インク吐出面16Aの汚れはインク吐出面16Aの全面に付着することがありうるので、検出装置70はインク吐出面16Aの全面から撮像データを取得することが好ましい。
【0083】
図5(a)に符号71Aを付した一点破線は、撮像部140の焦点が合っている面(合焦対象面71A)を表している。合焦対象面71Aは、検出装置70(撮像部140)のピントが合っている撮像データが得られる面であり、撮像部の光軸に対して直交する面である。図5(a)における合焦対象面71Aは、紙面を貫く方向に広がっている。
【0084】
この合焦対象面71Aとインク吐出面16Aが交差する位置がインク吐出面16Aにおける合焦対象位置71Bであり、インク吐出面16A上の現実の合焦位置である。図5(a)における合焦対象位置71Bは、紙面を貫く方向へ伸びる線である。
【0085】
図5(c)に示すインク吐出面16Aの平面図では、合焦対象位置71Bはインク吐出面16Aの短手方向の両端に達する長さを有し、インク吐出面16Aの短手方向と交差する斜め方向の線として把握される。
【0086】
図5(c)は、撮像部140の光軸140A(代表的な光軸を図示)をインク吐出面16Aと平行な面に投影させた状態を図示しているとも言える。図5(c)から、撮像部140の光軸140Aをインク吐出面16Aと平行な面に投影させたときの光軸140Aの方向が、インクジェットヘッド16の移動方向と交差していることが把握できる。
【0087】
検出装置70は、インク吐出面16Aにおける合焦対象位置71Bを中心として所定幅を有する合焦対象領域(図9に符号200を付して図示する、インク吐出面16Aの実際にピントが合った撮像データを取得できる領域)が設定され、少なくとも該合焦対象領域の撮像データを取得している。
【0088】
合焦対象領域の撮像データを取得するには、撮像可能領域全体の撮像データを取得した後に、撮像可能領域全体の撮像データの中から合焦対象領域の撮像データを切り出し(抽出)してもよいし、合焦対象領域の撮像データのみを取得してもよい。
【0089】
言い換えると、撮像部の全域から撮像データを取得した後に撮像データの処理により合焦対象領域の撮像データを抽出してもよいし、撮像部の合焦対象領域に対応する一部分のみから撮像データを取得してもよい(詳細後述)。
【0090】
〔検出装置の構成例〕
次に、検出装置70の構成の一例について説明する。図6は、検出装置70の概略構成を示すブロック図である。同図に示すように、インク吐出面16A(図5参照)を撮像するCCDイメージセンサ(図7に符号160を付して図示)を具備する撮像部140と、検出装置70の各部を統括的に制御する制御部142と、撮像部140の撮像条件(合焦対象領域、撮像時間間隔等)を設定する撮像条件設定部144と、撮像部140から得られた撮像データに所定の処理を施して検出情報を生成する撮像データ処理部146と、撮像部140から得られた撮像データや撮像データ処理部146によって生成された検出情報(インク吐出面16Aの画像等)が記憶される記憶部148と、該検出情報を外部へ出力する情報出力部150と、外部からの情報が入力される入力インターフェース(入力I/F)部152と、インク吐出面16Aに照明光を照射する照明部154と、を備えて構成される。
【0091】
撮像条件設定部144は、予め記憶されている撮像条件情報を参照して撮像部140の撮像条件を設定する。撮像情報は、入力I/F部152を介して外部から入力された情報とすることができる。
【0092】
入力I/F部152には、USB(Universal Serial Bus)等の汎用インターフェースや、キーボード(タッチパネル)、マウスなど入力装置を適用することができる。
【0093】
図7は、検出装置70に具備されるCCDイメージセンサ160の概略構成図である。同図に示すCCDイメージセンサ160は、カラーフィルタを備えたインターライン型CCDである。
【0094】
同図に示すCCDイメージセンサ160は、複数のフォトダイオード162(162A,162B)が二次元状に配置され、各フォトダイオード162に蓄積された信号電荷を垂直方向に転送する垂直転送CCD164と、垂直転送CCD164から送り出される信号電荷を水平方向へ転送する水平転送CCD166と、水平転送CCD166によって水平方向へ転送された信号電荷を点順次の電圧信号として出力する出力回路168と、を備えている。
【0095】
図7に示すCCDイメージセンサ160は、フォトダイオード162が千鳥配置されているので、実質的な垂直方向の撮像分解能は同方向のフォトダイオード162の配置密度の二倍となっている。例えば、フォトダイオード162Aを含むフォトダイオード群と、その右隣のフォトダイオード162Bを含むフォトダイオード群とは、フォトダイオード162の配置ピッチが同一であり、垂直方向の位相が1/2ピッチずらして配置されている。
【0096】
この2つのフォトダイオード群は、実質的に同方向におけるひとつのフォトダイオード群とみなすことができる。なお、図7では、フォトダイオード162と垂直転送CCD164との間に設けられる転送ゲート、転送ゲートを制御する転送ゲート電極等の図示は省略されている。
【0097】
CCDイメージセンサ160の信号電荷の読み出しは、以下の手順により行われる。(1)まず、不図示の転送ゲートを閉じておき、インクジェットヘッド16のインク吐出面16Aを撮像する(フォトダイオード162を感光する)。(2)転送ゲートを開いてフォトダイオード162に蓄積された電荷を垂直転送CCD164へ一斉に転送する。(3)転送ゲートを閉じ、各垂直転送CCD164の電荷を1回分転送する。各フォトダイオード群93の端部にある画素の電荷が水平転送CCD166へ移送される。
【0098】
(4)水平転送CCD166に順次転送パルスを与えて全水平画素を出力する。(5)(3)に戻って、垂直転送CCD164の全画素を読み出すまで(3)から(5)が繰り返され、すべてのフォトダイオード162から信号電荷が読み出される。
【0099】
図7には、撮像部140に具備される撮像素子の例として、フォトダイオード162が千鳥配置された構造を有するインターライン型CCDイメージセンサを例示したが、フォトダイオード162が正方格子状に配置された構造を有するインターライン型CCDイメージセンサを適用してもよいし、フレームトランスファ型CCDイメージセンサを適用してもよい。
【0100】
本例では、カラーフィルタを備えたCCDイメージセンサを例示したが、カラーフィルタを具備しないモノクロのCCDイメージセンサを適用してもよい。また、CMOSイメージセンサを使用してもよい。
【0101】
図8は、図7に示すCCDイメージセンサ160の信号処理部の構成を示すブロック図である。なお、図8に示す信号処理部170は、図6の撮像データ処理部146の一部を構成しているので、図8中、図6と同一又は類似する部分には同一の符号を付し、その説明は省略する。
【0102】
図8に示す信号処理部170は、CCDイメージセンサ160の出力信号(アナログ信号)に所定の信号処理を施すアナログ信号処理部172と、アナログ信号処理部172による信号処理後のアナログ信号をデジタル信号に変換するA/D変換部174と、該デジタル信号に所定の信号処理を施すデジタル信号処理部176と、CCDイメージセンサ160、アナログ信号処理部172、A/D変換部174を同期制御するための同期信号を出力するCCD駆動部178と、デジタル信号処理部176による信号処理後のデジタル信号(デジタルデータ)が記憶される記憶部180と、記憶部180に記憶されているデジタルデータを出力する信号出力部182と、を備えている。
【0103】
図8に示す信号処理部170は、CCDイメージセンサ160の光学系161とともに制御部142によって統括制御される。光学系161には、フォーカスレンズ、ズームレンズ、絞りなどが含まれる。
【0104】
なお、信号処理部170によって生成されたインク吐出面16Aの画像を表示させる表示部186を備える態様も可能である。かかる態様では、記憶部180に記憶されているデジタルデータをテレビ信号(映像信号)に変換するテレビ信号処理部188が具備される。
【0105】
図8に示すアナログ信号処理部172では、色分解、ゲイン調整、オフセット調整等の処理が施され、デジタル信号処理部176ではホワイトバランス調整、ガンマ補正等の信号処理が施され、インク吐出面16Aの画像として記憶部180に記憶される。
【0106】
〔撮像データの処理の説明〕
次に、検出装置70における撮像データの処理の具体例について説明する。図9は、インク吐出面の合焦対象領域の説明図であり、インク吐出面16Aの一部の平面図であるまた、図10は、撮像データの合成処理の説明図である。
【0107】
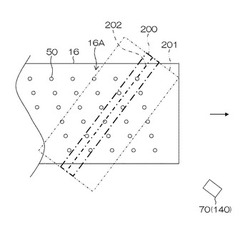
図9に示すように、インク吐出面16Aには撮像部140の撮像可能領域201(一点破線の細線により図示)の一部に合焦対象領域200(一点破線の太線により図示)が設定される。
【0108】
合焦対象領域200は、図5(a)から(c)を用いて説明した合焦対象位置71B(図9では符号202を付して図示)を中心線として、ピントが合っていてぼけていない撮像画像を得ることができる、平面形状が台形、扇形又は矩形の領域とされる。なお、必要に応じて合焦対象領域200の平面形状に対応する補正をしてもよい。
【0109】
先に説明したように、インク吐出面16Aに対して斜め方向から該インク吐出面16Aの撮像データが取得されるので、CCDイメージセンサ160(図7参照)の受光領域の中でピントが合っている領域とピントが合っていないぼける領域が存在する。
【0110】
本例に示す検出装置70は、ピントが合った画像(撮像データ)が得られる合焦対象領域200が撮像条件として予め決められている。合焦対象領域200はインク吐出面16AとCCDイメージセンサ160との位置関係から事前に決めておくことができる。また、CCDイメージセンサ160の焦点合わせの際に決めることもできる。
【0111】
さらに、撮像部140がセンターフォーカス機能を有している場合は、撮像部140(CCDイメージセンサ160)のセンターからの幅と、インク吐出面16Aと撮像部140の合焦対象面71Aとの光線(合焦対象位置71B)との角度から、焦点合わせの際に、合焦対象領域200を求めることができる。
【0112】
そして、合焦対象領域200の設定(撮像部140の合焦設定)が維持された状態で、インクジェットヘッド16と検出装置70とを相対移動させながら、インク吐出面16Aの全面(少なくとも、ノズル配置領域の全域)にわたって異常検出が実行される。
【0113】
図10は、撮像データの合成処理の説明図である。図10に図示した合成処理は、各合焦対象領域200‐1,200‐2,…、から得られた画像を合成してインク吐出面16Aの全面の画像が生成される例である。
【0114】
図10に示す例では、各合焦対象領域200を含む撮像可能領域の撮像データから合焦対象領域200のみの撮像データが切り出され、各合焦対象領域200の画像が生成されて、各合焦対象領域200の画像が時系列の順に合成され、インク吐出面16Aの全面の画像が生成されている。
【0115】
なお、各合焦対象領域200の撮像データ(撮像データを処理した後の画像データ)を時系列の順に合成した後に、合成済みの撮像データから合成画像を生成してもよい。
【0116】
図10に示すインク吐出面16Aの画像を観察すると、汚れ204A及び汚れ204Bを把握することができる。予め汚れ等の異常がない状態のインク吐出面16Aの画像を記憶しておき、異常がない状態のインク吐出面16Aの画像と検出装置70によって生成された画像とを比較して、異常の有無を判断することができる。
【0117】
次に、上記した画像データの合成処理について、さらに詳細に説明する。以下の説明では、インク吐出面16Aのエッジ(縁部、端部)を基準にして画像を合成する例を示す。なお、画像データのデータ形式はビットマップ形式として説明する。
【0118】
図11は、任意の合焦対象領域200を含む撮像可能領域の撮像データから切り出された合焦対象領域200の撮像データに基づいて生成された、該合焦対象領域200の画像データ210を示す説明図である。
【0119】
また、図12(a)から(c)は、図11に示す合焦対象領域200の画像の合成処理の説明図である。以下に、画像データの合成処理の手順を時系列に沿って説明する。なお、図12(a)から(c)に図示した合焦対象領域200の画像は、合焦対象領域200の中にノズル列が入っている例であり、処理対象の合焦対象領域200の画像には、図11に図示したものだけでなく、図12(a)から(c)に図示したものや、これら以外のものが含まれることがある。
【0120】
まず、インク吐出面16Aの長手側のエッジ(短手方向におけるエッジ)16Bが抽出される(図12(a))。次に、エッジ16Bがビットマップデータ上のX軸もしくはY軸に揃うように画像データをシフトさせる(図12(b)。さらに、画像データ取得開始直後に取得できる短手側エッジ(長手方向におけるエッジ)の傾き情報から、エッジ16Bの画像データシフトと直交方向にデータをシフトさせる。
【0121】
これらの前処理で、ビットマップデータ上にノズルプレートを正面から見た画像のフォーカスエリアに相当する部分をデータ化でき、画像の合成に好都合であるし、テレビ信号処理部を通じて表示部へ画像を表示する場合にも好都合である。なお、各画像データの幅が均一になるように縮尺の調整が必要な場合には、画像データ取得開始直後に取得できる長手側エッジが合焦対象領域200を横切る長さなどの情報から、縮尺の調整に必要な情報を得ることができる。
【0122】
具体的には、インク吐出面16Aの長手側エッジでセンサに近い側が拡大されて撮像されることから、拡大率にあわせて合焦対象領域200を予め台形に設定しておき、撮像後に前記の前処理の時に台形補正を行うことで、矩形で縮尺が調整された画像を得ることができるし、合焦対象領域200の幅を極狭く取り、多くの線状の画像を合成することで台形補正を省略することもできる。
【0123】
このようにして、ビットマップ上にノズルプレートを正面から見た画像として合焦対象領域200に相当する部分がビットマップデータ化される(図12(c))。
【0124】
このようにして、各合焦対象領域200の画像データが生成されると、各画像データの重複部分が削除されつつ、時系列順に各合焦対象領域200の画像データが合成される。各合焦対象領域200の撮像タイミングの時刻の情報や、検出装置70とインクジェットヘッド16の相対速度の情報を記憶しておくと、これらの情報を参照しながら重複や欠落が発生しない各合焦対象領域200の画像データの合成処理が実現できる。
【0125】
また、画像データの一部を重ねながら合成してもよい。重複部分の処理にはAND処理(重複部分を抽出する処理)、より濃度の低いデータを優先する処理を適用してもよい。このような処理を適用することで、ノイズデータが除去されるのに対して、汚れのような広範囲の領域で有効なデータが連続する画像データが残されることになる。さらに、合成処理は行わずに合成処理前の矩形画像を並べて記憶部に保存し、テレビ信号処理部を通じて表示部へ画像を表示することもできる。
【0126】
図13(a)は、合焦対象領域200に設定された、合焦対象位置71Bに平行な線分240(240A,240B,240C)を示す説明図であり、図13(b)は、各線分240上の撮像データを示す説明図である。
【0127】
上記した画像データの合成処理において、図13(a)に図示した合焦対象位置71B(240B)に並ぶ線分240A,240B,240Cを使用することができる。なお、図13(a)の線分240Bは合焦対象位置71Bと一致している。また、図13(a)において符号16Cを付して図示した線は、長手方向の中心を通る短手方向と平行な線(インク吐出面16Aの長手方向の中心線)である。
【0128】
図13(a)に図示した合焦対象領域200は、例えば、インク吐出面16Aを非常に近い位置で、かつ、正面に近い向きで見た場合や、合焦対象領域200の幅を非常に狭くした場合の例であり、合焦対象領域200にゆがみがなく、平面形状はほほ矩形であり、3本の線分240A,240B,240Cは平行となっている。一方、合焦対象領域200の撮像画像の手前側(図の下側)と奥側(図の上側)で縮尺が異なり、撮像されたノズル列(群)が台形や扇形と見える場合は、3本の線分240A,240B,240Cが非平行となってこともありうる。
【0129】
図13(b)に図示された各線分240A,240B,240C上の撮像データ250A,250B,250Cのデータ値には、輝度信号のデータ値、任意の色成分の検出値、各色成分の合算値などを適用することができる。
【0130】
図14(a),(b)は、図13(a)に図示した各線分240A,240B,240Cの撮像データ250A,250B,250Cをシフトさせる処理を模式的に図示した説明図である。
【0131】
図14(a)はインク吐出面16Aの短手方向のエッジ16Bを基準位置として、基準位置が撮像データ250A,250B,250C上で揃うように、撮像データ250B,250Cをシフトさせて格納した例を示している(インク吐出面16Aの短手方向のオフセット)。
【0132】
図14(a)において、符号260を付した位置が基準位置(エッジ16B)であり、撮像データ250Aに合わせて撮像データ250B,250Cをシフトさせている。
【0133】
また、線分240A,240B,240Cは、それぞれインク吐出面16Aの長手方向の中心線16Cに対して直交していないので、インク吐出面16Aの長手方向の中心線16Cと各線分240A,240B,240Cとのなす角度をそれぞれ求めておき、撮像データ上でアドレスをずらして当該撮像データを格納する必要がある。
【0134】
そこで、インク吐出面16Aの長手方向のエッジ(不図示)を利用すること、又はインク吐出面16Aに長手方向の中心線16Cをマーキングして利用することで、インク吐出面16Aの長手方向のオフセット量を求めることができ、図14(b)に示すように、該オフセット量に基づいて、撮像データを基準位置262からシフトさせることができる。
【0135】
このように、インク吐出面16Aの短手方向のエッジ16B、長手方向のエッジ(不図示)、インク吐出面16Aの長手方向における中心線16Cなど、インク吐出面16Aのエッジ及び該エッジに相当する部分の特徴点を抽出し、この特徴点を基準として撮像データをシフトさせることで、重複や欠落がなく合焦対象領域200の撮像データ(画像)を合成することができる。
【0136】
インク吐出面16Aの特徴点には、ヘッドモジュールをはめ込むための境界部分(ヘッドモジュールのつなぎ部分)や、斜め方向に配置されたノズル50から構成されるノズル群の端のノズルを結んだ仮想線を適用してもよい。なお、該仮想線はノズルの配置データから演算して求めることができる。
【0137】
また、画像の特徴(ハイコントラスト部を有するポイントなど)を特徴点として抽出することも可能である。
【0138】
図15は、合成処理の基準として、インク吐出面16Aにマーキングが形成される例を示すインク吐出面16Aの平面図である。
【0139】
同図に示すように、インク吐出面16Aに合焦対象領域200ごとのマーキング270(270A,270B,270C)を形成し、該合焦対象領域200ごとのマーキング270を参照しながら、各合焦対象領域200の画像データを合成することも可能である。
【0140】
図15には、合焦対象領域200ごとに異なる形状のマーキング270A,270B,270Cが形成される態様を例示したが、同一の形状のマーキング270を形成してもよい。また、他のマーキング270の例として、斜め方向にノズル50が配置されたノズル群の両脇に連続した線を形成する態様、汚れと区別しやすい特定の色(例えば、白色)の連続線を形成する態様が挙げられる。さらに、ノズル配置を利用することも可能である。
【0141】
以上説明した撮像データの処理では、合焦対象領域200の撮像データからインク吐出面16Aの画像(ビットマップ形式等の画像データ)を生成する処理を説明したが、合焦対象領域200ごとに画像又は画像データを生成して、合成処理をせずに合焦対象領域200ごとに異常を検出することも可能である。
【0142】
例えば、一回の撮像ごとに撮像可能領域の撮像データから合焦対象領域200の撮像データを抽出し、合焦対象領域200の画像データを生成して、各合焦対象領域200の撮像タイミングの時刻データの情報や、検出装置70とインクジェットヘッド16の相対速度の情報等を参照しながら、合焦対象領域200の単位で異常の有無を判断してもよい。
【0143】
さらに、図13(b)に示したように、撮像データ(画像データが生成される前の輝度データ等)250に基づいて、異常の有無を判断することも可能である。次に、図13(b)に図示した撮像データ250に基づくインク吐出面16Aの異常検出について説明する。
【0144】
図16は、合焦対象領域200の撮像データ250に基づく、インク吐出面16Aの異常検出の説明図である。図16(a)は汚れ280が付着したインク吐出面16Aの平面図であり、図16(b)は汚れ280が付着したインク吐出面16Aの撮像データ250A’、250B’,250C’を示す説明図である。
【0145】
図16(b)に示す撮像データ250A’、250B’,250C’には、図16(a)の汚れ280に対応する信号成分252A,252B,252Cが存在する。したがって、正常時の撮像信号250A,250B,250C(図13(b)参照)を基準として撮像信号のパターンの変化から、異常の有無を判断することができる。
【0146】
また、色成分の比率の変化から異常の有無を判断することも可能である。色成分の比率が予め設定されているしきい値を超えた場合、ある色成分の値が連続して高い値を示す場合などを異常として取り扱うことも可能である。さらに、これらの異常判断を組み合わせて、複数の基準により異常の有無を判断することも可能である。
【0147】
この異常検出は、合成処理前の矩形画像に対して行うこともできる。かかる場合には、撮像(検出)の途中でも異常検出ができることから、ブレード(図3参照)によるワイピングの制御などに、直ちにフィードバックをかけることができ好都合である。
【0148】
図17は、インク吐出面16Aの異常検出の制御の流れを示すフローチャートである。同図に示すように、インク吐出面16Aの異常検出が開始されると(ステップS10)、検出装置70の検出条件(撮像部140の撮像条件)が設定される(ステップS12)。該撮像条件には、合焦対象領域200(図9参照)の設定、フォーカス設定、インクジェットヘッド16の移動速度、撮像タイミングなどが挙げられる。
【0149】
ステップS12において撮像条件が設定されると、インク吐出面16Aの撮像が開始され、順次撮像データが取得され、撮像データから画像データが生成され、記憶される(ステップS13)。ステップS14において、インク吐出面16Aの全領域が撮像されたか否かが判断され、全領域の撮像が終わるまでこの処理が繰り返される(ステップS14のNo判定)。
【0150】
一方、インク吐出面16Aの全領域が撮像されたと判断されると(ステップS14のYes判定)、画像データの解析が行われる(ステップS16)。ステップS16の画像データの解析によって異常が発見されなければ(ステップS18のNo判定)、当該インク吐出面16Aの異常検出は終了される(ステップS24)。
【0151】
一方、ステップS18において異常が発見されると(Yes判定)、当該異常情報が所定のメモリに記憶され(ステップS20)、異常情報が出力される(ステップS22)。この異常情報には、異常の位置(異常が発生した合焦対象領域)の情報、異常の内容(汚れ、傷等)の情報が含まれる。
【0152】
ステップS22において異常情報が出力されると、当該インク吐出面16Aの異常検出は終了される。なお、撮像を行いながら異常の有無を判断し、直ちにブレードよるワイピングの制御にフィードバックをかける場合には、全領域を撮像したか否かの判断(ステップS14)の前に異常の有無の判断を行い、かつ、異常の有無の情報を撮像位置情報とともに外部に出力すればよい。
【0153】
上記の如く構成された検出装置70及びインク吐出面16Aの異常検出によれば、検出装置70(撮像部140)の合焦対象面71Aとインク吐出面16Aとの交差位置(合焦対象位置71B)を含む合焦対象領域200が設定されるとともに、フォーカスが設定され、これらの設定が維持された状態で、合焦対象領域200の撮像データが取得され、合焦対象領域200の撮像データに基づいてインク吐出面16Aの異常の有無が判断されるので、インク吐出面16Aの全面を一度に検出することができない検出装置70の検出条件(撮像部140の撮像条件)の設定を変更することなく、インク吐出面16Aを全面にわたって(少なくとも、ノズル配置領域の全域)を検出することができる。
【0154】
また、合焦対象領域200を設定することで、インク吐出面16Aと検出装置70の検出面(撮像部140の撮像面)とを正確に平行に調整する必要がなく、インク吐出面16Aと検出装置70の検出面との位置関係に変動が生じても、インク吐出面16Aの撮像データ(画像)を取得することが可能である。
【0155】
さらに、検出装置70とインクジェットヘッド16とを相対移動させながら、検出装置70(撮像部140)のピント合わせを行う必要がなく、インク吐出面16Aの高速検出が可能である。
【0156】
〔インクジェットヘッドのメンテナンス処理の説明〕
次に、上述したインク吐出面16Aの異常検出の結果を反映させたインクジェットヘッド16のメンテナンス処理について説明する。
【0157】
図18は、インク吐出面16Aの異常検出結果をブレード66による払拭処理に反映させる例の説明図である。ブレード66は、不図示の湿潤化処理部によって湿潤化されたインク吐出面16Aに接触させて、インク吐出面16Aの汚れを払拭除去するものである。
【0158】
インクジェットヘッド16の移動方向(矢印線により図示したインクジェットヘッド16の長手方向)に対して、ブレード66を傾けるようにブレード66の姿勢を調整する調整機構を具備し、インクジェットヘッド16の短手方向に対する合焦対象領域200の角度に合わせて、ブレード66の角度αが調整される。
【0159】
このように、合焦対象領域200に対して略平行となるようにブレード66の姿勢を調整しておくと、インク吐出面16Aに汚れが付着していると判断された場合に、単純な制御によって払拭処理部68(ブレード66)の払拭条件(払拭圧力の変更)へのフィードバックが可能となる。
【0160】
すなわち、インク吐出面16Aの異常情報に応じて、メンテナンス処理の条件を変更することができ、異常情報のメンテナンス条件(メンテナンス回数、処理環境温度等)へのフィードバックが単純になるように、合焦対象領域200とメンテナンス処理部との関係を決めておくとよい。
【0161】
図19は、本例に示すインク吐出面16Aの異常検出の結果を反映させるインクジェットヘッド16のメンテナンス処理の制御の流れを示すフローチャートである。
【0162】
同図に示すように、インクジェットヘッド16のメンテナンス処理が開始されると(ステップS100)、インクジェットヘッド16を画像形成位置からメンテナンス位置へ移動させ(ステップS102)、図17に示すインク吐出面16Aの異常検出が実行される(ステップS104)。
【0163】
ステップS104におけるインク吐出面16Aの異常検出が終了すると、インク吐出面16Aの異常情報の有無が確認される(ステップS106)。異常情報がない場合は(ステップS106のNo判定)、メンテナンス条件が標準条件に設定されてインク吐出面の洗浄(ステップS110)、パージ(ステップS112)等の処理が適宜実行される。
【0164】
一方、異常情報がある場合は(ステップS106のYes判定)、異常情報に対応してメンテナンス条件が設定(変更)され(ステップS108)、インク吐出面の洗浄(ステップS110)、パージ(ステップS112)等の処理が適宜実行される。
【0165】
インクジェットヘッド16に対する所定の処理が終了すると、インクジェットヘッド16を画像形成位置へ移動させ(ステップS114)、当該インクジェットヘッド16のメンテナンス処理が終了される(ステップS116)。
【0166】
本例では、インクジェットヘッド16のメンテナンス処理前にインク吐出面16Aの異常検出が実行される態様について説明したが、インクジェットヘッド16のメンテナンス処理後にインク吐出面16Aの異常検出を実行してもよいし、インクジェットヘッド16のメンテナンス処理の前後の両方でインク吐出面16Aの異常検出を実行してもよい。
【0167】
インクジェットヘッド16のメンテナンス後にインク吐出面16Aの異常検出が実行される場合には、図3における検出装置70の向きを左右反転させて、検出装置70の検出面がメンテナンス処理部60の方向へ向けてもよい。
【0168】
かかる態様は、インク吐出面16Aの検出のためのデータをより早いタイミングで取得することができる。
【0169】
なお、ブレード66の弾性変形が開放される向きを避けて検出装置70が配置されることが好ましい。例えば、図3において、検出装置70とブレード66との位置を入れ換えて、インクジェットヘッド16の移動方向上流側に検出装置70が配置され、下流側にブレード66が配置されればよい。
【0170】
また、図3に図示された配置において、検出装置70とブレード66との距離を離して、ブレード66の弾性変形が開放されたときに液が飛ばない位置に検出装置が配置されてもよい。ブレード66の弾性変形が開放されたときに液が飛ばない位置はインクジェットヘッド16の移動速度やブレード66の材質、経年変化や劣化の状態によって変わるので、実験的に求めておくとよい。
【0171】
〔他の装置構成への応用例〕
次に、上述したインク吐出面16Aの異常検出の他の装置構成への応用例を説明する。以下の説明では、インクジェットヘッド316K,316C,316M,316Yのインク吐出面316A(316AK,316AC,316AM,316AY)が、圧胴314の外周面と直交して対向するように、水平面に対して傾けられてインクジェットヘッド316K,316C,316M,316Yが配置される態様について説明する。
【0172】
図20は、記録媒体の搬送に圧胴搬送方式が適用されるインクジェット記録装置300の概略構成図である。同図に示すインクジェット記録装置300は、渡し胴328から圧胴(描画胴)314へ受け渡された記録媒体に対して、印字部317によってカラー画像が形成され、画像形成後の記録媒体が圧胴314から渡し胴332へ受け渡される。
【0173】
図20に図示は省略するが、インクジェット記録装置300は、記録媒体搬送方向と直交する方向(同図における紙面を貫く方向)の圧胴314から離れた位置にメンテナンス処理部が具備される(図3参照)。インクジェットヘッド316K,316C,316M,316Yは一括して画像形成位置とメンテナンス処理部の処理位置とを移動するように構成される。
【0174】
図21は、図20に図示したインクジェット記録装置300におけるインク吐出面316Aの異常検出の説明図であり、図21(a)は検出装置370が1つの場合であり、図21(b)は検出装置370(370‐1,370‐2)が2つの場合である。
【0175】
図21(a)に示す検出装置370を1つ備える場合では、4つのインクジェットヘッド316K,316C,316M,316Yの中央(インクジェットヘッド316Cとインクジェットヘッド316Mとの間)に検出装置370が配置され、1つの検出装置370が4つのインクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYを共通の撮像条件で同時に検出している。
【0176】
図21(a)に図示した態様において、各インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYは、圧胴314の外周面に向けて傾けられているので、圧胴314の回転軸(中心軸)から水平面に対して直交する方向に伸ばした線上に検出装置370を配置させることで、インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYを検出装置370の検出領域の中に収めることが可能となる。
【0177】
また、図21(b)に示す検出装置370を2つ備える場合では、第1の検出装置370‐1はインクジェットヘッド316Mとインクジェットヘッド316Yとの間に配置され、第2の検出装置370‐2はインクジェットヘッド316Kとインクジェットヘッド316Cとの間に配置され、1つの検出装置370‐1は2つのインクジェットヘッド316M,316Yのインク吐出面316AM,316AYを同時に検出し、検出装置370‐2はインクジェットヘッド316K,316Cのインク吐出面316AK,316ACを共通の撮像条件で同時に検出している。
【0178】
すなわち、水平面に対して傾斜配置された複数のインクジェットヘッド316K,316C,316M,316Yのそれぞれのインク吐出面316AK,316AC,316AM,316AYを、インクジェットヘッド316K,316C,316M,316Yの数よりも少ない数の検出装置370を用いて検出し、1つの検出装置370は1つのインク吐出面316A又は複数のインク吐出面316Aの検出を共通の撮像条件で同時に行っている。
【0179】
図21(a),(b)に図示した例においても、検出装置370は、各インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYに対して斜め方向からインク吐出面316AK,316AC,316AM,316AYを検出している。
【0180】
また、検出装置370は、インク吐出面316Aの直下(インク吐出面316Aの通過領域の直下)を避けて配置され、かつ、ブレード366(366K,366C,366M,366Y)から飛び散ったインクが付着する領域を避けて配置される。
【0181】
なお、検出装置370は、インクジェットヘッド316Kの外縁を鉛直方向に下ろした面の内側であり、インクジェットヘッド316Yの外縁鉛直方向に下ろした面の内側に配置されている。
【0182】
また、検出装置の撮像部の向き(撮像部の光軸の向き)をインク吐出面316AK,316AC,316AM,316AYと平行な面のいずれにも交わるように配置される。
【0183】
ここで、1つの検出装置370を用いて、複数のインクジェットヘッド316のインク吐出面316Aの異常検出を行う場合の課題について説明する。図22は、該課題を示す説明図である。
【0184】
インク吐出面316Aの異常検出では、数十から数百マイクロメートルの大きさを有する汚れや傷の有無が解析されるので、接写(近接撮像)や顕微鏡撮像(高倍率の拡大撮像)によって得られる程度の高精細の画像が必要になる。しかし、複数のインクジェットヘッド316のインク吐出面316Aを撮像可能領域に入れるには、検出装置370(撮像部)の性能の制約がある。
【0185】
広角撮影が可能な光学系を具備することも考えられるが、この場合は検出装置370をインク吐出面316Aにより近づける必要があり、インクジェットヘッド316の配置上の制約が存在する。
【0186】
また、図22に示すように、検出装置370と各インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYとの距離の違いがあり、検出装置370をインク吐出面316AK,316AC,316AM,316AYへ近づけると、距離の違いが拡大されてしまい、検出装置370からより離れているインクジェットヘッド316K,316Yは画像の歪みが大きくなって、高精細な画像を得ることが困難になる。
【0187】
そうすると、各インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYにおける合焦対象領域200(図9参照)の画像を合成する際に、歪みの補正が多くなり、画像の精度が落ちてしまうという課題が存在する。
【0188】
一方、図23に示すように、各インク吐出面316AK,316AC,316AM,316AYと検出装置370との距離を等しくすることが可能であるが、検出装置370の配置上の制約が生じてしまい、検出の要求精度を満足しつつ、検出装置370の配置上の制約を回避することは困難である。
【0189】
そこで、図24に示すように、望遠マクロ系の撮像部を備えた検出装置370’を備え、各インク吐出面316AK,316AC,316AM,316AYからある程度離した位置に検出装置370’を配置して、各インク吐出面316AK,316AC,316AM,316AYを検出装置370’の視野に入れつつ、各インク吐出面316AK,316AC,316AM,316AYと検出装置370’との距離がより短くなるように、検出装置370’の配置が調整される。
【0190】
すなわち、望遠マクロ系の撮像部を備える態様では、検出装置370’から観察面(インク吐出面316AK,316AC,316AM,316AYの合焦対象領域200)のまでの距離は離すが、インク吐出面316AK,316AC,316AM,316AY自体と検出装置370’との距離は離さなくてもよい。
【0191】
図24において、符号371KB,371CB,371MB,371YBを付して図示した一点破線は、各インク吐出面316AK,316AC,316AM,316AYのある撮像タイミングにおける合焦対象位置であり、矢印線は代表的な視野を表している。
【0192】
図25は、図24に図示した検出装置370’により得られた各インクジェットヘッド316K,316C,316M,316Y(図24参照)画像340K,340C,340M,340Yを示す説明図である。
【0193】
インク吐出面316AK,316AC,316AM,316AYごとに、検出装置370’の合焦対象面(図5参照)とインク吐出面との交線である合焦対象位置371KB,371CB,371MB,371YBが異なるので、合焦対象領域はインク吐出面316AK,316AC,316AM,316AYごとに決まる。
【0194】
ここで、撮像条件を設定する際に、検出装置370’の合焦対象面と各インク吐出面316AK,316AC,316AM,316AYが、インクジェットヘッド316K,316C,316M,316Yと検出装置370’との相対移動の最中に交差するように設定されていれば、各インク吐出面316AK,316AC,316AM,316AYの合焦対象領域の画像を一度に取得することが可能である。
【0195】
つまり、撮像条件を設定する際に、ある1つのヘッドに対して合焦対象面の距離を設定して合焦対象領域を設定し、残りのヘッドに対しては、当該ある1つのヘッドに対する設定を維持しつつ、各ヘッドに対する合焦対象領域が決められる。なお、合焦対象領域の平面形状や数は、ヘッドごとに異なることがありうる。
【0196】
合焦対象領域200(図9参照)の画像を合成する処理や、合焦対象領域の撮像データからインク吐出面316Aの異常を判断する処理は、先に説明した1つの検出装置70による1つのインク吐出面16Aの検出の処理を適用することができる。
【0197】
本応例に係るインク吐出面の異常検出によれば、1つの検出装置により複数のインクジェットヘッド316のインク吐出面316Aの異常検出を、共通の検出条件により同時に行うことができるので、メンテナンス処理部の構成を簡素化することができる。
【0198】
本発明の実施形態では、記録媒体上にカラー画像を形成するインクジェット記録装置に具備されるインクジェットヘッドのインク吐出面の異常検出を例に挙げて説明したが、本発明の適用範囲はインクジェット記録装置に限定されない。
【0199】
例えば、樹脂粒子や金属粒子を含有する機能性液体により、所定のパターン(マスクパターン、配線パターン)を形成するパターン形成装置なと、インクジェット方式により媒体上に液体を噴射させる液体吐出装置に広く適用することが可能である。
【0200】
また、上記の実施形態では、フルライン型のインクジェットヘッドのインク吐出面の異常検出を例に挙げて説明したが、本発明は、記録媒体の全幅に満たない流さにわたってノズルが配置されたシリアル型ヘッドにも適用可能である。
【0201】
さらに、本発明の趣旨を逸脱しない範囲で、適宜構成要件を変更、追加、削除することが可能である。
【0202】
〔付記〕
上記に詳述した発明の実施形態についての記載から把握されるとおり、本明細書は少なくとも以下に示す態様を含む多様な技術思想の開示を含んでいる。
【0203】
(第1態様):第1態様に係る検出装置は、インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、前記インクジェットヘッドと前記撮像手段とを相対的に移動させる相対移動手段と、前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、を備えている。
【0204】
第1の態様によれば、インクジェットヘッドの液体吐出面の直下を避けて配置される撮像手段により、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する際に、撮像手段により得られる撮像データの中から、ピントが合っている画像が得られる領域である合焦対象領域が設定され、撮像手段の合焦設定を維持しつつ、インクジェットヘッドと撮像手段とを相対的に移動させて、所定の時間間隔で液体吐出面を撮像するので、液体吐出面における撮像手段のピントが合っている画像が得られる領域を所定の時間間隔で撮像することができ、撮像手段の合焦設定を変更することなく液体吐出面の全面にわたる撮像データを取得することができる。
【0205】
また、合焦対象領域の撮像データが抽出され、この撮像データに基づいて液体吐出面の異常が検出されるので、撮像手段の撮像可能領域の全域にピントを合わせるための液体吐出面と撮像手段とを平行にするための精密な調整が不要となる。
【0206】
さらに、液体吐出面の直下を避けて撮像手段が配置されるので、液体吐出面から滴下する液体による撮像手段の汚染が回避される。
【0207】
撮像手段は、所定の撮像可能範囲を有する撮像素子と、撮像素子の撮像対象側に設けられる光学系と、を含む態様がある。また、撮像素子の撮像対象側にカラーフィルタを備える態様もある。
【0208】
液体吐出面の直下を避けた位置とは、液体吐出面の縁を水平面に投影させたときにできる液体吐出面と水平面と、液体吐出面の縁から水平面に達する面により囲まれた領域の外側である。
【0209】
少なくとも、撮像手段の撮像面が液体吐出面の直下を避けた位置に配置されなければよい。
【0210】
(第2態様):第2態様に係る検出装置は、前記撮像手段により連続撮像された撮像データから前記合焦対象領域の撮像データを抽出する抽出手段を備えている。
【0211】
かかる態様によれば、ピントが合っていない撮像領域の撮像データが含まれる撮像データの中からピントが合っている領域の撮像データが抽出されるので、ピントが合っている撮像データに基づいて、液体吐出面の異常が検出される。
【0212】
(第3態様):第3態様に係る検出装置は、前記抽出手段によって抽出された前記合焦対象領域の撮像データを時系列の順に合成して、前記液体吐出面の合成画像を生成する合成画像生成手段を備えている。
【0213】
かかる態様によれば、液体吐出面のより広い範囲のピントが合っている画像を得ることができる。
【0214】
(第4態様):第4態様に係る検出装置は、前記合成画像生成手段は、前記液体吐出面に設けられた基準位置を基準として、複数の前記合焦対象領域の撮像データを時系列の順に合成している。
【0215】
かかる態様によれば、合焦対象領域の画像を合成する際に、画像の欠落や重複を避けることができ、好ましい合成画像が形成される。
【0216】
基準位置は、液体吐出面の端部(端辺)でもよいし、液体吐出面に形成されたマーキングでもよい。さらに、液体吐出面に形成されるノズル(ノズル開口)の配置を利用してもよい。
【0217】
(第5態様):第5態様に係る検出装置は、前記撮像手段により一回の撮像により得られた撮像データから前記合焦対象領域の撮像データを抽出する抽出手段を備えている。
【0218】
かかる態様によれば、一回の撮像により得られる撮像データの単位で液体吐出面の異常を検出することができる。
【0219】
(第6態様):第6態様に係る検出装置は、前記異常情報生成手段は、予め記憶されている前記液体吐出面の正常時の画像と、前記合成画像生成手段により生成された液体吐出面の画像と、を比較した比較結果に基づいて、前記液体吐出面の異常情報を生成している。
【0220】
かかる態様によれば、正常と異常とを視覚的に判断することができ、異常の有無の判断が容易である。
【0221】
(第7態様):第7態様に係る検出装置は、前記データ処理手段は、前記液体吐出面における位置に対する前記合焦対象領域の撮像データのデータ値を表す検出信号を生成している。
【0222】
かかる態様によれば、撮像データから画像を生成する処理が不要となり、データ処理の負荷を軽減化しうる。
【0223】
かかる態様において、撮像データのデータ値を時系列順に合成して、相対移動方向における液体吐出面の位置に対する撮像データのデータ値の関係を表す検出信号を生成する態様がある。
【0224】
(第8態様):第8態様に係る検出装置は、異常情報生成手段は、前記検出信号のパターンの変化に基づいて前記液体吐出面の異常情報を生成している。
【0225】
かかる態様によれば、撮像データのデータ値の変動に基づいて、液体吐出面の異常を検出しうる。
【0226】
(第9態様):第9態様に係る液体吐出装置は、インクジェットヘッドと、前記インクジェットヘッドの液体吐出面の異常を検出する検出装置と、前記インクジェットヘッドと前記検出装置とを相対的に移動させる相対移動手段と、を備え、前記検出装置は、前記インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、を具備している。
【0227】
液体吐出装置とは、インクジェット方式により媒体上に所定の液体(液滴)を付与する装置であり、一例として、記録媒体上にカラー画像を形成するインクジェット記録装置が挙げられる。
【0228】
インクジェットヘッドには、媒体の全幅(媒体搬送方向と直交する方向における媒体の全長)に対応する長さのノズル群を有するフルライン型ヘッドや、媒体搬送方向に沿って複数のノズルが配置されたシリアル型ヘッドがある。
【0229】
相対移動手段には、固定されたインクジェットヘッドに対して撮像手段を移動させる態様、固定された撮像手段に対してインクジェットヘッドを移動させる態様、撮像手段及びインクジェットヘッドとも移動させる態様がある。
【0230】
(第10態様):第10態様に係る液体吐出装置は、前記検出装置は、検出面が前記相対移動手段の移動方向に対して斜め方向に向けて配置されている。
【0231】
かかる態様において、検出面が向けられる方向、及び相対移動手段の移動方向を液体吐出面と平行方向に投影したそれぞれの方向が交差する態様が好ましい。
【0232】
(第11態様):第11態様に係る液体吐出装置は、前記液体吐出面を払拭する払拭部材を備え、前記検出装置は、払拭部材から飛散した液体が付着しない位置に配置されている。
【0233】
かかる態様によれば、払拭部材から飛散される液体による検出装置の汚染を回避しうる。
【0234】
かかる態様における払拭部材の一例として、弾性変形させながら液体吐出面に接触させて、液体吐出面を払拭するブレードが挙げられる。ブレードの弾性変形が開放されるときに液体吐出面から拭き取られた液体が飛散することがあるので、ブレードが弾性変形状態から戻る方向を避けて検出装置が配置されればよい。
【0235】
かかる態様は、検出装置の前方に払拭部材が配置される場合に効果がある。
【0236】
(第12態様):第12態様に係る液体吐出装置は、前記検出装置は、前記インクジェットヘッドの液体吐出により飛散した液体が付着しない位置に配置されている。
【0237】
かかる態様によれば、インクジェットヘッドの液体吐出により飛散した液体(ミスト状液体)による検出装置の汚染を回避しうる。
【0238】
(第13態様):第13態様に係る液体吐出装置は、前記インクジェットヘッドにメンテナンス処理を施すメンテナンス処理手段と、前記検出装置から出力される前記異常情報に基づいて、前記メンテナンス手段の処理条件を設定する処理条件設定手段と、を備えている。
【0239】
かかる態様によれば、液体吐出面の異常の有無(汚れの付着の有無)に応じたインクジェットヘッドのメンテナンス処理を実行することができる。
【0240】
(第14態様):第14態様に係る液体吐出装置は、前記相対移動手段は、前記インクジェットヘッドの液体吐出位置と前記メンテナンス手段によるメンテナンス処理位置との間で、前記インクジェットヘッドと前記検出装置とを相対移動させ、前記検出装置は、メンテナンス処理前又はメンテナンス処理後の前記インクジェットヘッドの液体吐出面の異常検出を行っている。
【0241】
かかる態様によれば、メンテナンス処理前に液体吐出面を検出することで、液体吐出面の状態をメンテナンス処理に反映させることができる。また、メンテナンス処理後の液体吐出面を検出することで、液体吐出面のメンテナンスが適切に実行されたか否かを判断しうる。
【0242】
また、重量物であるインクジェットヘッドが一定速度でメンテナンス処理位置へ移動する際に、無停止で液体吐出面の全面にわたる撮像データを取得することができる。
【0243】
(第15態様):第15態様に係る液体吐出装置は、前記インクジェットヘッドを複数備えるとともに、前記インクジェットヘッドの数よりも少ない数の前記検出装置を備えている。
【0244】
かかる態様によれば、複数のインクジェットヘッドを備える装置において、より少ない検出装置によりすべてのインクジェットヘッドの液体吐出面の検出を実行することで、液体吐出面を検出する構成を小型化することができ、装置構成の簡素化に寄与しうる。
【0245】
かかる態様における撮像手段は、望遠マクロ系の光学系を具備する態様が好ましい。
【0246】
(第16態様):第16態様に係る液体吐出装置は、円筒形状を有し、前記インクジェットヘッドから吐出させた液体を受ける媒体を外周面に支持して前記円筒形状の中心軸を回転軸として回転させて、前記媒体を前記外周面に沿って搬送させる媒体搬送手段を備え、前記複数のインクジェットヘッドは、前記媒体搬送手段の外周面に対向する位置に配置され、前記相対移動手段は、前記複数のインクジェットヘッドを一括して前記検出装置に対して相対的に移動させている。
【0247】
かかる態様において、各インクジェットヘッドの液体吐出面が媒体搬送手段の外周面に向けて傾けられているので、媒体搬送手段の回転軸(中心軸)から水平面に対して直交する方向に伸ばした線上に撮像手段を配置させる態様がある。
【0248】
(第17態様):第17態様に係る液体吐出装置は、前記インクジェットヘッドは、フルライン型ヘッドであり、前記相対移動手段は、前記インクジェットヘッドの長手方向と略平行に前記インクジェットヘッドと前記検出装置とを相対的に移動させている。
【0249】
かかる態様おいて、撮像手段の一回の撮像おける撮像領域がインクジェットヘッド(液体吐出面)の短手方向の全長に対応することで、インクジェットヘッドと検出装置とをインクジェットヘッドの長手方向の全長にわたって一回だけ相対的に移動させることで、液体吐出面の全面の撮像が可能である。
【0250】
(第18態様):第18態様に係る液体吐出装置は、前記検出装置には、第2態様から第8態様のいずれかに記載の検出装置が含まれる。
【0251】
(第19態様):第19態様に係る液体吐出面の異常検出方法は、インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記インクジェットヘッドとを相対的に移動させて前記液体吐出面を撮像し、撮像結果に基づいて前記液体吐出面の異常を検出する液体吐出面の異常検出方法において、前記撮像手段を前記液体吐出面に合焦させる合焦設定工程と、前記撮像手段と相対的に移動される前記液体吐出面における前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定工程と、前記撮像手段の合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像する撮像工程と、前記撮像工程によって得られた撮像データに所定の処理を施すデータ処理工程と、前記データ処理工程によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成工程と、前記異常情報生成工程によって生成された前記液体吐出面の異常情報を出力する異常情報出力工程と、を含んでいる。
【0252】
かかる態様において、撮像工程により連続撮像された撮像データから合焦対象領域の撮像データを抽出する抽出工程を含む態様や、抽出工程によって抽出された合焦対象領域の撮像データを時系列の順に合成して、液体吐出面の合成画像を生成する合成画像生成工程を含む態様が好ましい。
【0253】
また、合成画像生成工程において、液体吐出面に設けられた基準位置を基準として、複数の前記合焦対象領域の撮像データを時系列の順に合成する態様が好ましい。
【0254】
さらに、撮像工程により一回の撮像により得られた撮像データから合焦対象領域の撮像データを抽出する抽出を含む態様も好ましい。
【0255】
かかる態様において、異常情報生成工程は、予め記憶されている液体吐出面の正常時の画像と、前記撮像手段によって得られた撮像データから生成された液体吐出面の画像と、を比較した比較結果に基づいて、液体吐出面の異常情報を生成する態様も好ましい。
【0256】
また、データ処理工程は、液体吐出面における位置に対する合焦対象領域の撮像データのデータ値を表す検出信号を生成し、異常情報生成工程において、検出信号のパターンの変化に基づいて液体吐出面の異常情報を生成する態様も好ましい。
【0257】
また、第20態様に係る液体吐出面の異常検出方法を含み、液体吐出面の異常情報に基づいて処理条件が設定されるインクジェットヘッドのメンテナンス方法も好ましい。
【符号の説明】
【0258】
10,300…インクジェット記録装置、16,16K,16C,16M,16Y,316,316K,316C,316M,316Y…インクジェットヘッド、16A,316A…インク吐出面、60…メンテナンス処理部、66…ブレード、68…払拭処理部、70…検出装置、71A…合焦対象面、72B,202…合焦対象位置102…システム制御部、126…メンテナンス制御部、128…異常検出部、140…撮像部、142…制御部、144…撮像条件設定部、146…データ処理部、150…情報出力部、176…デジタル信号処理部、200…合焦対象領域,201…撮像可能領域
【技術分野】
【0001】
本発明は検出装置、液体吐出装置、及び液体吐出面の異常検出方法に係り、特にインクジェットヘッドの液体吐出面の異常検出技術に関する。
【背景技術】
【0002】
インクジェット記録装置に具備されるインクジェットヘッドは、インク吐出面(液体吐出面)に液状のインクや固化したインクなどの汚れが付着すると、吐出性能を低下させてしまうことがありうる。例えば、ノズル開口の近傍に汚れが付着すると、吐出量の減少や飛翔方向の曲がりが発生して、ドットサイズの異常やドットの形成位置の異常の原因となる。
【0003】
インクジェットヘッドのインク吐出性能の低下を回避するために、インクジェットヘッドのインク吐出面の定期的な洗浄が実行され、インク吐出面から汚れが除去されている。例えば、インク吐出面の洗浄処理前にインク吐出面と光学センサとを相対的に走査させながらインク吐出面の汚れを検出し、その検出結果からインク吐出面の汚れの有無を把握して、この検出結果を反映させることで、インク吐出面の洗浄処理が効率よく実行される。
【0004】
特許文献1は、待機領域に設けられた撮像手段を用いてノズル配列面を撮像し、撮像結果に基づいて吐出不良の有無を判断するように構成されたインクジェット記録装置を開示している。特許文献1には、ライン型のインクジェットヘッドの吐出不良を検出する際に、インクジェットヘッドを長手方向に退避させて撮像手段を同方向に移動させる構成が開示されている。
【0005】
特許文献2は、記録ヘッドをフェイス面から観察するCCDカメラを備え、CCDカメラから得た画像を解析してフェイス面における混色の有無を判断するように構成されたインクジェット記録装置を開示している。特許文献2は、フェイス面表面に焦点を合わせてフェイス面に付着した液体を撮像する旨、フェイス面をもれなく撮像する際に、被写界深度が浅い場合にはピントを振って撮像する旨を開示している。
【0006】
特許文献3は、走査しながら撮像を行うカメラを開示している。特許文献3には、image planeとObject planeが平行にならない旨の技術課題が開示され、その解決手段として距離測定システムとゴニオメータで平行を出しながら、CCDカメラでの検査を行う旨が開示されている。
【0007】
特許文献4は、カメラの液体吐出ヘッドに対する角度を調整しつつ、該カメラを支持する構成が開示されている。特許文献4は、カメラによってメニスカス、飛翔液滴の静止画又は動画を撮影し、撮像された画像を解析して液滴の吐出異常を検出する旨を開示している。
【0008】
特許文献5は、各ノズル孔の位置情報及びノズル孔に対するフォーカシングの距離情報を取得し、各ノズル孔の内部を連続的に画像認識して異物の有無を検出するように構成されたノズルプレートの検査装置を開示している。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第3929049号公報
【特許文献2】特開2006−297772号公報
【特許文献3】米国特許公報第6525810号明細書
【特許文献4】特開2007−229928号公報
【特許文献5】特開2010−139357号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、インクジェットヘッドのインク吐出面とセンサの検出面(撮像素子の受光面)との平行状態を正確に保ちつつ、インク吐出面と検出面とを一定の速度で相対移動させることは困難であり、インク吐出面と検出面との距離の変動や相対速度の変動が生じると、検出結果に影響を与えてしまう。
【0011】
特に、フルライン型のインクジェットヘッドなど、大型のインクジェットヘッドを移動させながら、インク吐出面と検出面とを常に平行に保つことは難しい。センサとしてCCD固体撮像素子などの撮像素子を用いてインク吐出面を撮像する(画像を取得する)場合には、撮像により得られた画像の一部で焦点が合わないことが生じて、得られた画像からインク吐出面の汚れの有無を把握できないこともありうる。
【0012】
適宜焦点合わせを実行しながら連続撮像が行われる態様では、上記した課題を解決することができるものの、焦点合わせの際にインクジェットヘッドとセンサとの相対移動を停止させる必要がある。焦点合わせの回数が多くなるほどインクジェットヘッドとセンサとの相対移動を停止させる回数が多くなり、インク吐出面の検出に費やす時間が増加してしまう。
【0013】
特許文献1から5に開示された構成は、焦点合わせを行いつつ検出が行われるものであり、焦点がずれた場合にはインク吐出面に付着した汚れが正確に検出されないことが懸念される。一方、焦点合わせを実行する回数が増えるほど、インク吐出面の検出に費やす時間が長くなってしまう。
【0014】
また、特許文献4に開示された構成は、光路長の調整や焦点合わせが困難であり、装置構成が複雑になることが懸念される。特許文献5に開示された構成は、フォーカシングの距離を別途計測しているので、構成が複雑になってしまう。
【0015】
本発明はこのような事情に鑑みてなされたもので、厳密な焦点合わせを必要とせず、検出素子と液体吐出面との距離が変動した場合でも、液体吐出面の異常の有無を検出しうる検出装置、液体吐出装置、及び液体吐出面の検出方法を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記目的を達成するために、本発明に係る検出装置は、インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、前記インクジェットヘッドと前記撮像手段とを相対的に移動させる相対移動手段と、前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、を備えている。
【発明の効果】
【0017】
本発明によれば、インクジェットヘッドの液体吐出面の直下を避けて配置される撮像出により、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する際に、撮像手段により得られる撮像データの中から、ピントが合っている画像が得られる領域である合焦対象領域が設定され、撮像手段が合焦設定を維持しつつ、インクジェットヘッドと撮像手段とを相対的に移動させて、所定の時間間隔で液体吐出面を撮像するので、液体吐出面における撮像手段のピントが合っている画像が得られる領域を所定の時間間隔で撮像することができ、撮像手段の合焦設定を変更することなく液体吐出面の全面にわたる撮像データを取得することができる。
【0018】
また、合焦対象領域の撮像データが抽出され、この撮像データに基づいて液体吐出面の異常が検出されるので、撮像手段の撮像可能領域の全域にピントを合わせるための液体吐出面と撮像手段とを平行にするための精密な調整が不要となる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態に係るインクジェット記録装置の概略構成を示す全体構成図
【図2】図1に示すインクジェットヘッドの構造例を示す透視平面図
【図3】図1に示すインクジェット記録装置のメンテナンス処理部の概略構成を示すブロック図
【図4】図1に示すインクジェット記録装置の制御系の概略構成を示すブロック図
【図5】図3に示す検出装置の検出範囲を示す説明図、a:インクジェットヘッドを搬送方向と直交する方向から見た図、b:メンテナンス位置側から見た図、c:インク吐出面側から見た図
【図6】図3に示す検出装置のブロック図
【図7】図3に示す検出装置に具備されるCCDイメージセンサの概略構成図
【図8】図7に示すCCDイメージセンサの信号処理部の構成を示すブロック図
【図9】インク吐出面における合焦対象領域の説明図
【図10】撮像データの合成処理の説明図
【図11】合焦対象領域の画像データを示す説明図
【図12】図11に示す合焦対象領域の画像の合成処理の説明図、a:エッジ検出処理、b:シフト処理、c:拡大、縮小処理
【図13】a:合焦対象位置に平行な線分を示す説明図、b:該線分上の撮像データを示す説明図
【図14】合焦対象領域に設定された線分の撮像データをシフトさせる処理の説明図
【図15】インク吐出面の形成されたマーキングを示すインク吐出面の平面図
【図16】合焦対象領域の撮像データに基づくインク吐出面の異常検出の説明図
【図17】本発明に係るインク吐出面の異常検出の制御の流れを示すフローチャート
【図18】インク吐出面の異常検出結果を払拭処理に反映させる例の説明図
【図19】本発明に係るインク吐出面の異常検出を含むインクジェットヘッドのメンテナンス処理の制御の流れを示すフローチャート
【図20】他の装置構成への応用例に係るインクジェット記録装置の概略構成を示す全体構成図
【図21】図20に示すインクジェット記録装置におけるインク吐出面の異常検出の説明図、a:検出装置が1つの場合、b:検出装置が2つの場合
【図22】1つの検出装置を用いて、複数のインクジェットヘッドのインク吐出面の異常検出を行う場合の課題の説明図
【図23】1つの検出装置を用いて、複数のインクジェットヘッドのインク吐出面の異常検出を行う場合の他の課題の説明図
【図24】望遠マクロ系の撮像部を備えた検出装置によるインク吐出面の異常検出の説明図
【図25】図24に示す検出装置により得られる画像の説明図
【発明を実施するための形態】
【0020】
以下、添付図面に従って本発明を実施するための形態について詳説する。
【0021】
〔インクジェット記録装置の全体構成〕
図1は、本発明に係るインクジェット記録装置10の全体構成図である。図1に示すインクジェット記録装置10は、オンデマンド型インクジェット記録装置であり、記録媒体12を保持して搬送する記録媒体搬送部14と、記録媒体搬送部14に保持された記録媒体12に対して、K(黒)、C(シアン)、M(マゼンタ)、Y(イエロー)に対応するカラーインクを吐出させるインクジェットヘッド16K,16C,16M,16Yを含む印字部17と、を含んで構成されている。
【0022】
記録媒体搬送部14は、記録媒体12が保持される記録媒体保持領域に多数の吸着穴(不図示)が設けられた無端状の搬送ベルト18と、搬送ベルト18が巻き掛けられる搬送ローラ(駆動ローラ20、従動ローラ22)と、記録媒体保持領域の搬送ベルト18の裏側(記録媒体12が保持される記録媒体保持面と反対側の面)に設けられ、記録媒体保持領域に設けられた不図示の吸着穴にと連通しているチャンバー24と、チャンバー24に負圧を発生させる真空ポンプ26と、を含んでいる。
【0023】
また、記録媒体搬送部14は、筐体フレーム(図1中不図示、図3に符号15を付して図示)に収納されており、該筐体フレームに固定支持される。
【0024】
記録媒体12が搬入される搬入部28には、記録媒体12の浮きを防止するための押圧ローラ30が設けられるとともに、記録媒体12が排出される排出部32にもまた、押圧ローラ34が設けられている。
【0025】
搬入部28から搬入された記録媒体12は、記録媒体保持領域に設けられた吸着穴から負圧が付与され、搬送ベルト18の記録媒体保持領域に吸着保持される。
【0026】
記録媒体12の搬送路上には、印字部17の前段側(記録媒体搬送方向上流側)に、記録媒体12の表面温度を所定範囲に調整するための温度調節部36が設けられるとともに、印字部17の後段側(記録媒体搬送方向下流側)に、記録媒体12上に記録された画像を読み取る読取装置(読取センサ)38が設けられている。
【0027】
搬入部28から搬入された記録媒体12は、搬送ベルト18の記録媒体保持領域に吸着保持され、温度調節部36による温度調節処理が施された後に、印字部17において画像記録が行われる。
【0028】
図1に示すように、インクジェットヘッド16K,16C,16M,16Yは、記録媒体搬送方向の上流側からこの順番で配置されている。記録媒体12がインクジェットヘッド16K,16C,16M,16Yの直下を通過する際に、記録媒体12に対してKCMYの各色のインクを吐出させて、所望のカラー画像が形成される。
【0029】
なお、印字部17は上述した形態に限定されない。例えば、LC(ライトシアン)やLM(ライトマゼンタ)に対応するインクジェットヘッド16LC,16LMを具備してもよい。また、インクジェットヘッド16K,16C,16M,16Yの配置順も適宜変更可能である。
【0030】
画像記録がされた記録媒体12は、読取装置38によって記録画像(テストパターン)が読み取られ、不図示の定着処理部による必要な定着処理が施された後に、排出部32から排出される。読取装置38の読取結果は、インクジェットヘッド16K,16C,16M,16Yの吐出異常の判断に用いられる。
【0031】
図1に図示は省略するが、インクジェット記録装置10はインクジェットヘッド16K,16C,16M,16Yにメンテナンス処理を施すメンテナンス処理部(図3に符号60を付して図示)を備えている。メンテナンス処理部は、印字部17の記録媒体搬送方向と直交する方向について、印字部17から離れた位置に配置される(図3参照)。
【0032】
図1に示すインクジェット記録装置10は、不図示のインク供給部を具備している。インク供給部は、インクジェットヘッド16K,16C,16M,16Yに供給されるインクを貯蔵するインクタンクを色ごと(ヘッドごと)に備えている。色ごとのインクタンクのそれぞれとインクジェットヘッド16K,16C,16M,16Yとは、不図示のインク供給路により連通されている。
【0033】
〔印字部の構成〕
図2は、印字部17に具備されるインクジェットヘッド16K,16C,16M,16Yの構造例を示す透視平面図(インク吐出面の反対側面から見た図)である。図1に図示したインクジェットヘッド16K,16C,16M,16Yは同一の構造を適用することができるので、ここではインクジェットヘッド16K,16C,16M,16Yに共通の符号16を付して図示するものとする。
【0034】
インクジェットヘッド16は、記録媒体12の主走査方向Mにおける全長を超える長さにわたって、複数のノズル50及び圧力室52が含まれる吐出素子54が配置されたフルライン型のインクジェットヘッドである。
【0035】
フルライン型のインクジェットヘッド16と記録媒体12とを相対的に一回だけ移動させるシングルパス方式により、記録媒体12全域にわたって記録画像を記録することができる。
【0036】
図2に示すインクジェットヘッド16は、主走査方向Mに沿う行方向、及び主走査方向M及び副走査方向Sと直交しない斜めの列方向に沿って複数のノズル50(吐出素子54)がマトリクス配置された構造を有している。
【0037】
図2に示すようにノズル50をマトリクス配置させることで、主走査方向Mの実質的なノズル配置密度が高密度化される。なお、本発明に適用可能なインクジェットヘッドのノズル配置は図2に図示したマトリクス配置に限定されない。
【0038】
例えば、インクジェットヘッド16の長手方向に沿って複数のノズル50を配置したノズル列を一列有する態様や、同方向に複数のノズル50を二列の千鳥配置させる態様などを適用することができる。
【0039】
インクジェットヘッド16の吐出方式は、圧電素子のたわみ変形を利用する圧電方式や、インクの膜沸騰現象を利用するサーマル方式などの各種吐出方式が適用可能である。圧電方式が適用されるインクジェットヘッド16は、インクを吐出させるノズル50と、ノズル50と連通する圧力室52と、圧力室52の少なくとも一壁面に設けられる圧電素子と、を備えている。
【0040】
圧電素子は、上部電極及び下部電極に圧電体がはさまれた構造を有し、上部電極と下部電極との間に駆動電圧を印加することでたわみ変形が生じ、圧電素子のたわみ変形により圧力室52が変形することで、圧力室52の内部に収容されているインクがノズル50から吐出される。
【0041】
また、サーマル方式が適用されるインクジェットヘッドは、圧力室(液室)52の内部に収容されるインクを加熱するヒータを備え、圧力室52の内部のインクを瞬間的に加熱することで気泡を発生させ、ノズル50からインクを吐出させている。
【0042】
〔メンテナンス処理部の説明〕
図3は、図1に示すインクジェット記録装置10のメンテナンス処理部60の概略構成図であり、メンテナンス処理部60と印字部17との配置関係が図示されている。
【0043】
図3に示すように、メンテナンス処理部60は、インクジェットヘッド16(16K,16C,16M,16Y)を記録媒体搬送部14上の画像形成位置から、記録媒体12の搬送方向と略直交する方向に水平移動させた位置に配置されている。
【0044】
メンテナンス処理部60は、インクジェットヘッド16のインク吐出面16Aに洗浄液を付与する洗浄装置62と、インクジェットヘッド16に対してパージ処理又は吸引処理(ノズル内のインクの排出処理)を施すキャップ部64と、パージ処理又は吸引処理後のインクジェットヘッド16のインク吐出面16Aに対して払拭処理を施すブレード66を具備する払拭処理部68と、インクジェットヘッド16のインク吐出面16Aの異常を検出する検出装置70と、を備えて構成されている。
【0045】
なお、洗浄装置62と払拭処理部68とを一体に構成してもよいし、洗浄装置62、払拭処理部68、及びキャップ部64を一体に構成してもよい。
【0046】
図3では、1ヘッド分に対応するメンテナンス処理部60の構成が図示されているが、洗浄装置62、キャップ部64、払拭処理部68及び検出装置70はインクジェットヘッド16ごとに、インクジェットヘッド16の数だけ設けられている。なお、複数の洗浄装置62等を一体に構成することも可能である。
【0047】
インクジェットヘッド16を記録媒体搬送部14の直上の画像形成位置(画像形成位置に位置するインクジェットヘッド16を破線により図示)からメンテナンス位置へ移動させるには、インクジェットヘッド16を記録媒体搬送部14上の画像形成位置から一旦上方へ退避させ、さらに、記録媒体12の搬送方向と直交する方向へ水平移動させる。
【0048】
インクジェットヘッド16を上下方向及び水平方向へ移動させる移動機構には、周知の水平搬送機構、上下搬送機構を適用することができる。
【0049】
「メンテナンス位置」とは、検出装置70の処理領域、払拭処理部68の処理領域、洗浄装置62の処理領域、及びキャップ部64の処理領域を含む概念である。なお、図3では、キャップ部64の処理領域に位置するインクジェットヘッド16が一点破線によって図示されている。
【0050】
インクジェットヘッド16が洗浄装置62の処理領域に到達すると、洗浄装置62を上方へ移動させて(又は、インクジェットヘッド16を下方へ移動させて)、インク吐出面16Aの洗浄処理が実行される。
【0051】
インク吐出面16Aの洗浄処理が終了すると、インクジェットヘッド16をキャップ部64の処理領域へ移動させ、インク吐出面16Aにキャップ部64を密着させて、吸引処理又はパージ処理が実行される。
【0052】
キャップ部64は、排出流路72を介して廃インクタンク74と連通され、排出流路72には、ポンプ76が設けられる。インク吐出面16Aにキャップ部64を密着させ状態でポンプ76を動作させると、ノズルを介してインクジェットヘッド16内のインクが吸引される。
【0053】
このようにして、インクジェットヘッド16のパージ又は吸引処理が終了すると、インクジェットヘッド16は画像形成位置に移動する。
【0054】
検出装置70は、インクジェットヘッド16のインク吐出面16Aをインク吐出面16Aに対向する斜め方向から撮像するCCDイメージセンサ(図3中不図示、図7に符号160を付して図示)を具備する撮像部(図3中不図示、図6に符号140を付して図示)を備えている。インクジェット記録装置10は、撮像部から得られる撮像データ(静止画の撮像データ)に基づく検出装置70の検出結果をインクジェットヘッド16のメンテナンス処理に反映させている。
【0055】
検出装置70は、撮像部の撮像面が画像形成位置の方向を向いているので、記録媒体搬送部14を収納している筐体フレーム15やインクジェットヘッド16から飛散されたインクミストによる汚染を防止するために、撮像部の撮像面が筐体フレーム15から十分に離れた位置に配置される。
【0056】
なお、撮像部の撮像面がメンテナンス処理部60の方向を向いている場合には、上記したインクミストの影響を受けにくいので、検出装置70を筐体フレーム15のより近い位置に配置することができるので、装置の小型化が可能となる。
【0057】
〔制御系の説明〕
図4は、インクジェット記録装置10の制御系の概略構成を示すブロック図である。同図に示すように、インクジェット記録装置10は、通信インターフェース100、システム制御部102、搬送制御部104、画像処理部106、ヘッド駆動部108を備えるとともに、画像メモリ110、ROM112等を備えている。
【0058】
通信インターフェース100は、ホストコンピュータ114から送られてくるラスター画像データを受信するインターフェース部である。通信インターフェース100は、USB(Universal Serial Bus)などのシリアルインターフェースを適用してもよいし、セントロニクスなどのパラレルインターフェースを適用してもよい。通信インターフェース100は、通信を高速化するためのバッファメモリ(不図示)を搭載してもよい。
【0059】
システム制御部102は、中央演算処理装置(CPU)及びその周辺回路等から構成され、所定のプログラムに従ってインクジェット記録装置10の全体を制御する制御装置として機能するとともに、各種演算を行う演算装置として機能し、さらに、画像メモリ110及びROM112のメモリコントローラとして機能する。
【0060】
すなわち、システム制御部102は、通信インターフェース100、搬送制御部104等の各部を制御し、ホストコンピュータ114との間の通信制御、画像メモリ110及びROM112の読み書き制御等を行うとともに、上記の各部を制御する制御信号を生成する。
【0061】
ホストコンピュータ114から送出された画像データ(記録画像のデータ)は通信インターフェース100を介してインクジェット記録装置10に取り込まれ、画像処理部106によって所定の画像処理が施される。
【0062】
画像処理部106は、画像データから印字制御用の信号を生成するための各種加工、補正などの処理を行う信号(画像)処理機能を有し、生成した印字データ(ドットデータ)をヘッド駆動部108に供給する制御部である。
【0063】
画像処理部106において所要の信号処理が施されると、該印字データ(ハーフトーン画像データ)に基づいて、ヘッド駆動部108を介してインクジェットヘッド16の吐出液滴量(打滴量)や吐出タイミングの制御が行われる。
【0064】
これにより、所望のドットサイズやドット配置が実現される。なお、図4に示すヘッド駆動部108には、インクジェットヘッド16の駆動条件を一定に保つためのフィードバック制御系を含んでいてもよい。
【0065】
搬送制御部104は、画像処理部106により生成された印字データに基づいて記録媒体12(図1参照)の搬送タイミング及び搬送速度を制御する。図4における搬送駆動部116は、記録媒体12を搬送する記録媒体搬送部14の駆動ローラ20(22)を駆動するモータが含まれており、搬送制御部104は該モータのドライバーとして機能している。
【0066】
画像メモリ(一時記憶メモリ)110は、通信インターフェース100を介して入力された画像データを一旦格納する一時記憶手段としての機能や、ROM112に記憶されている各種プログラムの展開領域及びCPUの演算作業領域(例えば、画像処理部106の作業領域)としての機能を有している。画像メモリ110には、逐次読み書きが可能な揮発性メモリ(RAM)が用いられる。
【0067】
ROM112は、システム制御部102のCPUが実行するプログラムや、装置各部の制御に必要な各種データ、制御パラメータなどが格納されており、システム制御部102を通じてデータの読み書きが行われる。ROM112は、半導体素子からなるメモリに限らず、ハードディスクなど磁気媒体を用いてもよい。また、外部インターフェースを備え、着脱可能な記憶媒体を用いてもよい。
【0068】
パラメータ記憶部118は、インクジェット記録装置10の動作に必要な各種制御パラメータが記憶されている。システム制御部102は、制御に必要なパラメータを適宜読み出すとともに、必要に応じて各種パラメータの更新(書換)を実行する。
【0069】
プログラム格納部120は、インクジェット記録装置10を動作させるための制御プログラムが格納されている記憶手段である。システム制御部102(又は装置各部)は、装置各部の制御を実行する際にプログラム格納部120から必要な制御プログラムが読み出され、該制御プログラムは適宜実行される。
【0070】
表示部122は、システム制御部102から送出される各種情報を表示する手段であり、LCDモニタなどの汎用ディスプレイ装置が適用される。なお、表示部122の表示形態には、ランプの点灯(点滅、消灯)を適用してもよい。また、スピーカーなどの音(音声)出力手段を備えてもよい。
【0071】
入力インターフェース(I/F)124は、キーボード、マウス、ジョイスティックなどの情報入力手段が適用される。入力インターフェース124を介して入力された情報は、システム制御部102へ送出される。
【0072】
メンテナンス制御部126は、システム制御部102から送出された指令信号に基づいて、図3に図示したメンテナンス処理部60の各部の動作を制御する。例えば、インクジェットヘッド16の上下移動、水平移動、洗浄装置62によるインク吐出面16Aへの洗浄液付与、キャップ部64による予備吐出、吸引、ブレード66のインク吐出面16Aへの当接及び離間などを制御する。
【0073】
異常検出部128は、検出装置70から得られた検出結果に基づいてインクジェットヘッド16のインク吐出面16Aの異常の有無を判断する。インクジェットヘッド16のインク吐出面16Aの異常とは、インク吐出面16Aへの汚れの付着、傷の発見等が挙げられる。インク吐出面16Aの異常情報(異常の有無、異常の位置)はシステム制御部102へ送られる。
【0074】
システム制御部102がインク吐出面16Aの異常情報を取得すると、該異常情報は所定のメモリへ記憶されるとともに、メンテナンス制御部126送られる。メンテナンス制御部126は、インク吐出面16Aの異常情報をメンテナンス処理部60よるインクジェットヘッド16のメンテナンス処理に反映させる。
【0075】
〔インク吐出面の異常検出の説明〕
次に、検出装置70によるインク吐出面16Aの異常検出について詳細に説明する。図5は、図3に示す検出装置70の検出範囲の説明図である。
【0076】
図5(a)は、画像形成位置からメンテナンス位置へ移動するインクジェットヘッド16(16K,16C,16M,16Y)を搬送方向と直交する方向から見た図であり、左側が画像形成位置であり、右側がメンテナンス位置である。図5(b)は、メンテナンス位置側から見たインクジェットヘッド16であり、紙面を貫く方向がインクジェットヘッド16の移動方向である。図5(c)は、インク吐出面16A側から見た図であり、同図の下側がメンテナンス位置である。
【0077】
図5(a)から(c)に示すように、検出装置70(撮像部140)はインクジェットヘッド16のインク吐出面16Aの鉛直方向(水平面に対して直交する方向)の直下(図5(b)において二点破線により図示した領域)を避けて配置されており、インクジェットヘッド16のインク吐出面16Aやフレームから滴下するインクによる撮像部140の撮像面の汚染が回避されている。
【0078】
すなわち、検出装置70(撮像部140)の光軸(図5(c)に符号140Aを付して図示)が、インクジェットヘッド16のインク吐出面16Aの法線に対して非平行となるように検出装置70が配置されている。
【0079】
また、検出装置70はインク吐出面16Aの汚れや傷を把握できる程度の撮像データを取得する必要があるので、インク吐出面16Aが通過する経路の近接位置に配置されている。
【0080】
図5(a)から(c)に示す検出装置70は、インク吐出面16Aに対して斜め方向から撮像面を対向させるとともに、インクジェットヘッド16の移動方向に対して斜め方向からインク吐出面16Aに撮像面を対向させて、インク吐出面16Aの撮像データを取得するように配置されている。
【0081】
一方、検出装置70は一回の撮像でインク吐出面16Aの全面にわたり十分な精度の撮像データを取得できる撮像可能領域(撮像画角)及び撮影精度を有していない場合に対応するために、インク吐出面16Aとの相対的な位置を変えながら位置ごとに撮像を行うことで、インク吐出面16Aの全面の撮像データを取得している。
【0082】
なお、インク吐出面16Aの汚れはノズルが配置されるノズル配置領域に付着する可能性が高いので、検出装置70は少なくともインク吐出面16Aのノズルが配置されるノズル配置領域の全域から撮像データを取得できればよい。もちろん、インク吐出面16Aの汚れはインク吐出面16Aの全面に付着することがありうるので、検出装置70はインク吐出面16Aの全面から撮像データを取得することが好ましい。
【0083】
図5(a)に符号71Aを付した一点破線は、撮像部140の焦点が合っている面(合焦対象面71A)を表している。合焦対象面71Aは、検出装置70(撮像部140)のピントが合っている撮像データが得られる面であり、撮像部の光軸に対して直交する面である。図5(a)における合焦対象面71Aは、紙面を貫く方向に広がっている。
【0084】
この合焦対象面71Aとインク吐出面16Aが交差する位置がインク吐出面16Aにおける合焦対象位置71Bであり、インク吐出面16A上の現実の合焦位置である。図5(a)における合焦対象位置71Bは、紙面を貫く方向へ伸びる線である。
【0085】
図5(c)に示すインク吐出面16Aの平面図では、合焦対象位置71Bはインク吐出面16Aの短手方向の両端に達する長さを有し、インク吐出面16Aの短手方向と交差する斜め方向の線として把握される。
【0086】
図5(c)は、撮像部140の光軸140A(代表的な光軸を図示)をインク吐出面16Aと平行な面に投影させた状態を図示しているとも言える。図5(c)から、撮像部140の光軸140Aをインク吐出面16Aと平行な面に投影させたときの光軸140Aの方向が、インクジェットヘッド16の移動方向と交差していることが把握できる。
【0087】
検出装置70は、インク吐出面16Aにおける合焦対象位置71Bを中心として所定幅を有する合焦対象領域(図9に符号200を付して図示する、インク吐出面16Aの実際にピントが合った撮像データを取得できる領域)が設定され、少なくとも該合焦対象領域の撮像データを取得している。
【0088】
合焦対象領域の撮像データを取得するには、撮像可能領域全体の撮像データを取得した後に、撮像可能領域全体の撮像データの中から合焦対象領域の撮像データを切り出し(抽出)してもよいし、合焦対象領域の撮像データのみを取得してもよい。
【0089】
言い換えると、撮像部の全域から撮像データを取得した後に撮像データの処理により合焦対象領域の撮像データを抽出してもよいし、撮像部の合焦対象領域に対応する一部分のみから撮像データを取得してもよい(詳細後述)。
【0090】
〔検出装置の構成例〕
次に、検出装置70の構成の一例について説明する。図6は、検出装置70の概略構成を示すブロック図である。同図に示すように、インク吐出面16A(図5参照)を撮像するCCDイメージセンサ(図7に符号160を付して図示)を具備する撮像部140と、検出装置70の各部を統括的に制御する制御部142と、撮像部140の撮像条件(合焦対象領域、撮像時間間隔等)を設定する撮像条件設定部144と、撮像部140から得られた撮像データに所定の処理を施して検出情報を生成する撮像データ処理部146と、撮像部140から得られた撮像データや撮像データ処理部146によって生成された検出情報(インク吐出面16Aの画像等)が記憶される記憶部148と、該検出情報を外部へ出力する情報出力部150と、外部からの情報が入力される入力インターフェース(入力I/F)部152と、インク吐出面16Aに照明光を照射する照明部154と、を備えて構成される。
【0091】
撮像条件設定部144は、予め記憶されている撮像条件情報を参照して撮像部140の撮像条件を設定する。撮像情報は、入力I/F部152を介して外部から入力された情報とすることができる。
【0092】
入力I/F部152には、USB(Universal Serial Bus)等の汎用インターフェースや、キーボード(タッチパネル)、マウスなど入力装置を適用することができる。
【0093】
図7は、検出装置70に具備されるCCDイメージセンサ160の概略構成図である。同図に示すCCDイメージセンサ160は、カラーフィルタを備えたインターライン型CCDである。
【0094】
同図に示すCCDイメージセンサ160は、複数のフォトダイオード162(162A,162B)が二次元状に配置され、各フォトダイオード162に蓄積された信号電荷を垂直方向に転送する垂直転送CCD164と、垂直転送CCD164から送り出される信号電荷を水平方向へ転送する水平転送CCD166と、水平転送CCD166によって水平方向へ転送された信号電荷を点順次の電圧信号として出力する出力回路168と、を備えている。
【0095】
図7に示すCCDイメージセンサ160は、フォトダイオード162が千鳥配置されているので、実質的な垂直方向の撮像分解能は同方向のフォトダイオード162の配置密度の二倍となっている。例えば、フォトダイオード162Aを含むフォトダイオード群と、その右隣のフォトダイオード162Bを含むフォトダイオード群とは、フォトダイオード162の配置ピッチが同一であり、垂直方向の位相が1/2ピッチずらして配置されている。
【0096】
この2つのフォトダイオード群は、実質的に同方向におけるひとつのフォトダイオード群とみなすことができる。なお、図7では、フォトダイオード162と垂直転送CCD164との間に設けられる転送ゲート、転送ゲートを制御する転送ゲート電極等の図示は省略されている。
【0097】
CCDイメージセンサ160の信号電荷の読み出しは、以下の手順により行われる。(1)まず、不図示の転送ゲートを閉じておき、インクジェットヘッド16のインク吐出面16Aを撮像する(フォトダイオード162を感光する)。(2)転送ゲートを開いてフォトダイオード162に蓄積された電荷を垂直転送CCD164へ一斉に転送する。(3)転送ゲートを閉じ、各垂直転送CCD164の電荷を1回分転送する。各フォトダイオード群93の端部にある画素の電荷が水平転送CCD166へ移送される。
【0098】
(4)水平転送CCD166に順次転送パルスを与えて全水平画素を出力する。(5)(3)に戻って、垂直転送CCD164の全画素を読み出すまで(3)から(5)が繰り返され、すべてのフォトダイオード162から信号電荷が読み出される。
【0099】
図7には、撮像部140に具備される撮像素子の例として、フォトダイオード162が千鳥配置された構造を有するインターライン型CCDイメージセンサを例示したが、フォトダイオード162が正方格子状に配置された構造を有するインターライン型CCDイメージセンサを適用してもよいし、フレームトランスファ型CCDイメージセンサを適用してもよい。
【0100】
本例では、カラーフィルタを備えたCCDイメージセンサを例示したが、カラーフィルタを具備しないモノクロのCCDイメージセンサを適用してもよい。また、CMOSイメージセンサを使用してもよい。
【0101】
図8は、図7に示すCCDイメージセンサ160の信号処理部の構成を示すブロック図である。なお、図8に示す信号処理部170は、図6の撮像データ処理部146の一部を構成しているので、図8中、図6と同一又は類似する部分には同一の符号を付し、その説明は省略する。
【0102】
図8に示す信号処理部170は、CCDイメージセンサ160の出力信号(アナログ信号)に所定の信号処理を施すアナログ信号処理部172と、アナログ信号処理部172による信号処理後のアナログ信号をデジタル信号に変換するA/D変換部174と、該デジタル信号に所定の信号処理を施すデジタル信号処理部176と、CCDイメージセンサ160、アナログ信号処理部172、A/D変換部174を同期制御するための同期信号を出力するCCD駆動部178と、デジタル信号処理部176による信号処理後のデジタル信号(デジタルデータ)が記憶される記憶部180と、記憶部180に記憶されているデジタルデータを出力する信号出力部182と、を備えている。
【0103】
図8に示す信号処理部170は、CCDイメージセンサ160の光学系161とともに制御部142によって統括制御される。光学系161には、フォーカスレンズ、ズームレンズ、絞りなどが含まれる。
【0104】
なお、信号処理部170によって生成されたインク吐出面16Aの画像を表示させる表示部186を備える態様も可能である。かかる態様では、記憶部180に記憶されているデジタルデータをテレビ信号(映像信号)に変換するテレビ信号処理部188が具備される。
【0105】
図8に示すアナログ信号処理部172では、色分解、ゲイン調整、オフセット調整等の処理が施され、デジタル信号処理部176ではホワイトバランス調整、ガンマ補正等の信号処理が施され、インク吐出面16Aの画像として記憶部180に記憶される。
【0106】
〔撮像データの処理の説明〕
次に、検出装置70における撮像データの処理の具体例について説明する。図9は、インク吐出面の合焦対象領域の説明図であり、インク吐出面16Aの一部の平面図であるまた、図10は、撮像データの合成処理の説明図である。
【0107】
図9に示すように、インク吐出面16Aには撮像部140の撮像可能領域201(一点破線の細線により図示)の一部に合焦対象領域200(一点破線の太線により図示)が設定される。
【0108】
合焦対象領域200は、図5(a)から(c)を用いて説明した合焦対象位置71B(図9では符号202を付して図示)を中心線として、ピントが合っていてぼけていない撮像画像を得ることができる、平面形状が台形、扇形又は矩形の領域とされる。なお、必要に応じて合焦対象領域200の平面形状に対応する補正をしてもよい。
【0109】
先に説明したように、インク吐出面16Aに対して斜め方向から該インク吐出面16Aの撮像データが取得されるので、CCDイメージセンサ160(図7参照)の受光領域の中でピントが合っている領域とピントが合っていないぼける領域が存在する。
【0110】
本例に示す検出装置70は、ピントが合った画像(撮像データ)が得られる合焦対象領域200が撮像条件として予め決められている。合焦対象領域200はインク吐出面16AとCCDイメージセンサ160との位置関係から事前に決めておくことができる。また、CCDイメージセンサ160の焦点合わせの際に決めることもできる。
【0111】
さらに、撮像部140がセンターフォーカス機能を有している場合は、撮像部140(CCDイメージセンサ160)のセンターからの幅と、インク吐出面16Aと撮像部140の合焦対象面71Aとの光線(合焦対象位置71B)との角度から、焦点合わせの際に、合焦対象領域200を求めることができる。
【0112】
そして、合焦対象領域200の設定(撮像部140の合焦設定)が維持された状態で、インクジェットヘッド16と検出装置70とを相対移動させながら、インク吐出面16Aの全面(少なくとも、ノズル配置領域の全域)にわたって異常検出が実行される。
【0113】
図10は、撮像データの合成処理の説明図である。図10に図示した合成処理は、各合焦対象領域200‐1,200‐2,…、から得られた画像を合成してインク吐出面16Aの全面の画像が生成される例である。
【0114】
図10に示す例では、各合焦対象領域200を含む撮像可能領域の撮像データから合焦対象領域200のみの撮像データが切り出され、各合焦対象領域200の画像が生成されて、各合焦対象領域200の画像が時系列の順に合成され、インク吐出面16Aの全面の画像が生成されている。
【0115】
なお、各合焦対象領域200の撮像データ(撮像データを処理した後の画像データ)を時系列の順に合成した後に、合成済みの撮像データから合成画像を生成してもよい。
【0116】
図10に示すインク吐出面16Aの画像を観察すると、汚れ204A及び汚れ204Bを把握することができる。予め汚れ等の異常がない状態のインク吐出面16Aの画像を記憶しておき、異常がない状態のインク吐出面16Aの画像と検出装置70によって生成された画像とを比較して、異常の有無を判断することができる。
【0117】
次に、上記した画像データの合成処理について、さらに詳細に説明する。以下の説明では、インク吐出面16Aのエッジ(縁部、端部)を基準にして画像を合成する例を示す。なお、画像データのデータ形式はビットマップ形式として説明する。
【0118】
図11は、任意の合焦対象領域200を含む撮像可能領域の撮像データから切り出された合焦対象領域200の撮像データに基づいて生成された、該合焦対象領域200の画像データ210を示す説明図である。
【0119】
また、図12(a)から(c)は、図11に示す合焦対象領域200の画像の合成処理の説明図である。以下に、画像データの合成処理の手順を時系列に沿って説明する。なお、図12(a)から(c)に図示した合焦対象領域200の画像は、合焦対象領域200の中にノズル列が入っている例であり、処理対象の合焦対象領域200の画像には、図11に図示したものだけでなく、図12(a)から(c)に図示したものや、これら以外のものが含まれることがある。
【0120】
まず、インク吐出面16Aの長手側のエッジ(短手方向におけるエッジ)16Bが抽出される(図12(a))。次に、エッジ16Bがビットマップデータ上のX軸もしくはY軸に揃うように画像データをシフトさせる(図12(b)。さらに、画像データ取得開始直後に取得できる短手側エッジ(長手方向におけるエッジ)の傾き情報から、エッジ16Bの画像データシフトと直交方向にデータをシフトさせる。
【0121】
これらの前処理で、ビットマップデータ上にノズルプレートを正面から見た画像のフォーカスエリアに相当する部分をデータ化でき、画像の合成に好都合であるし、テレビ信号処理部を通じて表示部へ画像を表示する場合にも好都合である。なお、各画像データの幅が均一になるように縮尺の調整が必要な場合には、画像データ取得開始直後に取得できる長手側エッジが合焦対象領域200を横切る長さなどの情報から、縮尺の調整に必要な情報を得ることができる。
【0122】
具体的には、インク吐出面16Aの長手側エッジでセンサに近い側が拡大されて撮像されることから、拡大率にあわせて合焦対象領域200を予め台形に設定しておき、撮像後に前記の前処理の時に台形補正を行うことで、矩形で縮尺が調整された画像を得ることができるし、合焦対象領域200の幅を極狭く取り、多くの線状の画像を合成することで台形補正を省略することもできる。
【0123】
このようにして、ビットマップ上にノズルプレートを正面から見た画像として合焦対象領域200に相当する部分がビットマップデータ化される(図12(c))。
【0124】
このようにして、各合焦対象領域200の画像データが生成されると、各画像データの重複部分が削除されつつ、時系列順に各合焦対象領域200の画像データが合成される。各合焦対象領域200の撮像タイミングの時刻の情報や、検出装置70とインクジェットヘッド16の相対速度の情報を記憶しておくと、これらの情報を参照しながら重複や欠落が発生しない各合焦対象領域200の画像データの合成処理が実現できる。
【0125】
また、画像データの一部を重ねながら合成してもよい。重複部分の処理にはAND処理(重複部分を抽出する処理)、より濃度の低いデータを優先する処理を適用してもよい。このような処理を適用することで、ノイズデータが除去されるのに対して、汚れのような広範囲の領域で有効なデータが連続する画像データが残されることになる。さらに、合成処理は行わずに合成処理前の矩形画像を並べて記憶部に保存し、テレビ信号処理部を通じて表示部へ画像を表示することもできる。
【0126】
図13(a)は、合焦対象領域200に設定された、合焦対象位置71Bに平行な線分240(240A,240B,240C)を示す説明図であり、図13(b)は、各線分240上の撮像データを示す説明図である。
【0127】
上記した画像データの合成処理において、図13(a)に図示した合焦対象位置71B(240B)に並ぶ線分240A,240B,240Cを使用することができる。なお、図13(a)の線分240Bは合焦対象位置71Bと一致している。また、図13(a)において符号16Cを付して図示した線は、長手方向の中心を通る短手方向と平行な線(インク吐出面16Aの長手方向の中心線)である。
【0128】
図13(a)に図示した合焦対象領域200は、例えば、インク吐出面16Aを非常に近い位置で、かつ、正面に近い向きで見た場合や、合焦対象領域200の幅を非常に狭くした場合の例であり、合焦対象領域200にゆがみがなく、平面形状はほほ矩形であり、3本の線分240A,240B,240Cは平行となっている。一方、合焦対象領域200の撮像画像の手前側(図の下側)と奥側(図の上側)で縮尺が異なり、撮像されたノズル列(群)が台形や扇形と見える場合は、3本の線分240A,240B,240Cが非平行となってこともありうる。
【0129】
図13(b)に図示された各線分240A,240B,240C上の撮像データ250A,250B,250Cのデータ値には、輝度信号のデータ値、任意の色成分の検出値、各色成分の合算値などを適用することができる。
【0130】
図14(a),(b)は、図13(a)に図示した各線分240A,240B,240Cの撮像データ250A,250B,250Cをシフトさせる処理を模式的に図示した説明図である。
【0131】
図14(a)はインク吐出面16Aの短手方向のエッジ16Bを基準位置として、基準位置が撮像データ250A,250B,250C上で揃うように、撮像データ250B,250Cをシフトさせて格納した例を示している(インク吐出面16Aの短手方向のオフセット)。
【0132】
図14(a)において、符号260を付した位置が基準位置(エッジ16B)であり、撮像データ250Aに合わせて撮像データ250B,250Cをシフトさせている。
【0133】
また、線分240A,240B,240Cは、それぞれインク吐出面16Aの長手方向の中心線16Cに対して直交していないので、インク吐出面16Aの長手方向の中心線16Cと各線分240A,240B,240Cとのなす角度をそれぞれ求めておき、撮像データ上でアドレスをずらして当該撮像データを格納する必要がある。
【0134】
そこで、インク吐出面16Aの長手方向のエッジ(不図示)を利用すること、又はインク吐出面16Aに長手方向の中心線16Cをマーキングして利用することで、インク吐出面16Aの長手方向のオフセット量を求めることができ、図14(b)に示すように、該オフセット量に基づいて、撮像データを基準位置262からシフトさせることができる。
【0135】
このように、インク吐出面16Aの短手方向のエッジ16B、長手方向のエッジ(不図示)、インク吐出面16Aの長手方向における中心線16Cなど、インク吐出面16Aのエッジ及び該エッジに相当する部分の特徴点を抽出し、この特徴点を基準として撮像データをシフトさせることで、重複や欠落がなく合焦対象領域200の撮像データ(画像)を合成することができる。
【0136】
インク吐出面16Aの特徴点には、ヘッドモジュールをはめ込むための境界部分(ヘッドモジュールのつなぎ部分)や、斜め方向に配置されたノズル50から構成されるノズル群の端のノズルを結んだ仮想線を適用してもよい。なお、該仮想線はノズルの配置データから演算して求めることができる。
【0137】
また、画像の特徴(ハイコントラスト部を有するポイントなど)を特徴点として抽出することも可能である。
【0138】
図15は、合成処理の基準として、インク吐出面16Aにマーキングが形成される例を示すインク吐出面16Aの平面図である。
【0139】
同図に示すように、インク吐出面16Aに合焦対象領域200ごとのマーキング270(270A,270B,270C)を形成し、該合焦対象領域200ごとのマーキング270を参照しながら、各合焦対象領域200の画像データを合成することも可能である。
【0140】
図15には、合焦対象領域200ごとに異なる形状のマーキング270A,270B,270Cが形成される態様を例示したが、同一の形状のマーキング270を形成してもよい。また、他のマーキング270の例として、斜め方向にノズル50が配置されたノズル群の両脇に連続した線を形成する態様、汚れと区別しやすい特定の色(例えば、白色)の連続線を形成する態様が挙げられる。さらに、ノズル配置を利用することも可能である。
【0141】
以上説明した撮像データの処理では、合焦対象領域200の撮像データからインク吐出面16Aの画像(ビットマップ形式等の画像データ)を生成する処理を説明したが、合焦対象領域200ごとに画像又は画像データを生成して、合成処理をせずに合焦対象領域200ごとに異常を検出することも可能である。
【0142】
例えば、一回の撮像ごとに撮像可能領域の撮像データから合焦対象領域200の撮像データを抽出し、合焦対象領域200の画像データを生成して、各合焦対象領域200の撮像タイミングの時刻データの情報や、検出装置70とインクジェットヘッド16の相対速度の情報等を参照しながら、合焦対象領域200の単位で異常の有無を判断してもよい。
【0143】
さらに、図13(b)に示したように、撮像データ(画像データが生成される前の輝度データ等)250に基づいて、異常の有無を判断することも可能である。次に、図13(b)に図示した撮像データ250に基づくインク吐出面16Aの異常検出について説明する。
【0144】
図16は、合焦対象領域200の撮像データ250に基づく、インク吐出面16Aの異常検出の説明図である。図16(a)は汚れ280が付着したインク吐出面16Aの平面図であり、図16(b)は汚れ280が付着したインク吐出面16Aの撮像データ250A’、250B’,250C’を示す説明図である。
【0145】
図16(b)に示す撮像データ250A’、250B’,250C’には、図16(a)の汚れ280に対応する信号成分252A,252B,252Cが存在する。したがって、正常時の撮像信号250A,250B,250C(図13(b)参照)を基準として撮像信号のパターンの変化から、異常の有無を判断することができる。
【0146】
また、色成分の比率の変化から異常の有無を判断することも可能である。色成分の比率が予め設定されているしきい値を超えた場合、ある色成分の値が連続して高い値を示す場合などを異常として取り扱うことも可能である。さらに、これらの異常判断を組み合わせて、複数の基準により異常の有無を判断することも可能である。
【0147】
この異常検出は、合成処理前の矩形画像に対して行うこともできる。かかる場合には、撮像(検出)の途中でも異常検出ができることから、ブレード(図3参照)によるワイピングの制御などに、直ちにフィードバックをかけることができ好都合である。
【0148】
図17は、インク吐出面16Aの異常検出の制御の流れを示すフローチャートである。同図に示すように、インク吐出面16Aの異常検出が開始されると(ステップS10)、検出装置70の検出条件(撮像部140の撮像条件)が設定される(ステップS12)。該撮像条件には、合焦対象領域200(図9参照)の設定、フォーカス設定、インクジェットヘッド16の移動速度、撮像タイミングなどが挙げられる。
【0149】
ステップS12において撮像条件が設定されると、インク吐出面16Aの撮像が開始され、順次撮像データが取得され、撮像データから画像データが生成され、記憶される(ステップS13)。ステップS14において、インク吐出面16Aの全領域が撮像されたか否かが判断され、全領域の撮像が終わるまでこの処理が繰り返される(ステップS14のNo判定)。
【0150】
一方、インク吐出面16Aの全領域が撮像されたと判断されると(ステップS14のYes判定)、画像データの解析が行われる(ステップS16)。ステップS16の画像データの解析によって異常が発見されなければ(ステップS18のNo判定)、当該インク吐出面16Aの異常検出は終了される(ステップS24)。
【0151】
一方、ステップS18において異常が発見されると(Yes判定)、当該異常情報が所定のメモリに記憶され(ステップS20)、異常情報が出力される(ステップS22)。この異常情報には、異常の位置(異常が発生した合焦対象領域)の情報、異常の内容(汚れ、傷等)の情報が含まれる。
【0152】
ステップS22において異常情報が出力されると、当該インク吐出面16Aの異常検出は終了される。なお、撮像を行いながら異常の有無を判断し、直ちにブレードよるワイピングの制御にフィードバックをかける場合には、全領域を撮像したか否かの判断(ステップS14)の前に異常の有無の判断を行い、かつ、異常の有無の情報を撮像位置情報とともに外部に出力すればよい。
【0153】
上記の如く構成された検出装置70及びインク吐出面16Aの異常検出によれば、検出装置70(撮像部140)の合焦対象面71Aとインク吐出面16Aとの交差位置(合焦対象位置71B)を含む合焦対象領域200が設定されるとともに、フォーカスが設定され、これらの設定が維持された状態で、合焦対象領域200の撮像データが取得され、合焦対象領域200の撮像データに基づいてインク吐出面16Aの異常の有無が判断されるので、インク吐出面16Aの全面を一度に検出することができない検出装置70の検出条件(撮像部140の撮像条件)の設定を変更することなく、インク吐出面16Aを全面にわたって(少なくとも、ノズル配置領域の全域)を検出することができる。
【0154】
また、合焦対象領域200を設定することで、インク吐出面16Aと検出装置70の検出面(撮像部140の撮像面)とを正確に平行に調整する必要がなく、インク吐出面16Aと検出装置70の検出面との位置関係に変動が生じても、インク吐出面16Aの撮像データ(画像)を取得することが可能である。
【0155】
さらに、検出装置70とインクジェットヘッド16とを相対移動させながら、検出装置70(撮像部140)のピント合わせを行う必要がなく、インク吐出面16Aの高速検出が可能である。
【0156】
〔インクジェットヘッドのメンテナンス処理の説明〕
次に、上述したインク吐出面16Aの異常検出の結果を反映させたインクジェットヘッド16のメンテナンス処理について説明する。
【0157】
図18は、インク吐出面16Aの異常検出結果をブレード66による払拭処理に反映させる例の説明図である。ブレード66は、不図示の湿潤化処理部によって湿潤化されたインク吐出面16Aに接触させて、インク吐出面16Aの汚れを払拭除去するものである。
【0158】
インクジェットヘッド16の移動方向(矢印線により図示したインクジェットヘッド16の長手方向)に対して、ブレード66を傾けるようにブレード66の姿勢を調整する調整機構を具備し、インクジェットヘッド16の短手方向に対する合焦対象領域200の角度に合わせて、ブレード66の角度αが調整される。
【0159】
このように、合焦対象領域200に対して略平行となるようにブレード66の姿勢を調整しておくと、インク吐出面16Aに汚れが付着していると判断された場合に、単純な制御によって払拭処理部68(ブレード66)の払拭条件(払拭圧力の変更)へのフィードバックが可能となる。
【0160】
すなわち、インク吐出面16Aの異常情報に応じて、メンテナンス処理の条件を変更することができ、異常情報のメンテナンス条件(メンテナンス回数、処理環境温度等)へのフィードバックが単純になるように、合焦対象領域200とメンテナンス処理部との関係を決めておくとよい。
【0161】
図19は、本例に示すインク吐出面16Aの異常検出の結果を反映させるインクジェットヘッド16のメンテナンス処理の制御の流れを示すフローチャートである。
【0162】
同図に示すように、インクジェットヘッド16のメンテナンス処理が開始されると(ステップS100)、インクジェットヘッド16を画像形成位置からメンテナンス位置へ移動させ(ステップS102)、図17に示すインク吐出面16Aの異常検出が実行される(ステップS104)。
【0163】
ステップS104におけるインク吐出面16Aの異常検出が終了すると、インク吐出面16Aの異常情報の有無が確認される(ステップS106)。異常情報がない場合は(ステップS106のNo判定)、メンテナンス条件が標準条件に設定されてインク吐出面の洗浄(ステップS110)、パージ(ステップS112)等の処理が適宜実行される。
【0164】
一方、異常情報がある場合は(ステップS106のYes判定)、異常情報に対応してメンテナンス条件が設定(変更)され(ステップS108)、インク吐出面の洗浄(ステップS110)、パージ(ステップS112)等の処理が適宜実行される。
【0165】
インクジェットヘッド16に対する所定の処理が終了すると、インクジェットヘッド16を画像形成位置へ移動させ(ステップS114)、当該インクジェットヘッド16のメンテナンス処理が終了される(ステップS116)。
【0166】
本例では、インクジェットヘッド16のメンテナンス処理前にインク吐出面16Aの異常検出が実行される態様について説明したが、インクジェットヘッド16のメンテナンス処理後にインク吐出面16Aの異常検出を実行してもよいし、インクジェットヘッド16のメンテナンス処理の前後の両方でインク吐出面16Aの異常検出を実行してもよい。
【0167】
インクジェットヘッド16のメンテナンス後にインク吐出面16Aの異常検出が実行される場合には、図3における検出装置70の向きを左右反転させて、検出装置70の検出面がメンテナンス処理部60の方向へ向けてもよい。
【0168】
かかる態様は、インク吐出面16Aの検出のためのデータをより早いタイミングで取得することができる。
【0169】
なお、ブレード66の弾性変形が開放される向きを避けて検出装置70が配置されることが好ましい。例えば、図3において、検出装置70とブレード66との位置を入れ換えて、インクジェットヘッド16の移動方向上流側に検出装置70が配置され、下流側にブレード66が配置されればよい。
【0170】
また、図3に図示された配置において、検出装置70とブレード66との距離を離して、ブレード66の弾性変形が開放されたときに液が飛ばない位置に検出装置が配置されてもよい。ブレード66の弾性変形が開放されたときに液が飛ばない位置はインクジェットヘッド16の移動速度やブレード66の材質、経年変化や劣化の状態によって変わるので、実験的に求めておくとよい。
【0171】
〔他の装置構成への応用例〕
次に、上述したインク吐出面16Aの異常検出の他の装置構成への応用例を説明する。以下の説明では、インクジェットヘッド316K,316C,316M,316Yのインク吐出面316A(316AK,316AC,316AM,316AY)が、圧胴314の外周面と直交して対向するように、水平面に対して傾けられてインクジェットヘッド316K,316C,316M,316Yが配置される態様について説明する。
【0172】
図20は、記録媒体の搬送に圧胴搬送方式が適用されるインクジェット記録装置300の概略構成図である。同図に示すインクジェット記録装置300は、渡し胴328から圧胴(描画胴)314へ受け渡された記録媒体に対して、印字部317によってカラー画像が形成され、画像形成後の記録媒体が圧胴314から渡し胴332へ受け渡される。
【0173】
図20に図示は省略するが、インクジェット記録装置300は、記録媒体搬送方向と直交する方向(同図における紙面を貫く方向)の圧胴314から離れた位置にメンテナンス処理部が具備される(図3参照)。インクジェットヘッド316K,316C,316M,316Yは一括して画像形成位置とメンテナンス処理部の処理位置とを移動するように構成される。
【0174】
図21は、図20に図示したインクジェット記録装置300におけるインク吐出面316Aの異常検出の説明図であり、図21(a)は検出装置370が1つの場合であり、図21(b)は検出装置370(370‐1,370‐2)が2つの場合である。
【0175】
図21(a)に示す検出装置370を1つ備える場合では、4つのインクジェットヘッド316K,316C,316M,316Yの中央(インクジェットヘッド316Cとインクジェットヘッド316Mとの間)に検出装置370が配置され、1つの検出装置370が4つのインクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYを共通の撮像条件で同時に検出している。
【0176】
図21(a)に図示した態様において、各インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYは、圧胴314の外周面に向けて傾けられているので、圧胴314の回転軸(中心軸)から水平面に対して直交する方向に伸ばした線上に検出装置370を配置させることで、インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYを検出装置370の検出領域の中に収めることが可能となる。
【0177】
また、図21(b)に示す検出装置370を2つ備える場合では、第1の検出装置370‐1はインクジェットヘッド316Mとインクジェットヘッド316Yとの間に配置され、第2の検出装置370‐2はインクジェットヘッド316Kとインクジェットヘッド316Cとの間に配置され、1つの検出装置370‐1は2つのインクジェットヘッド316M,316Yのインク吐出面316AM,316AYを同時に検出し、検出装置370‐2はインクジェットヘッド316K,316Cのインク吐出面316AK,316ACを共通の撮像条件で同時に検出している。
【0178】
すなわち、水平面に対して傾斜配置された複数のインクジェットヘッド316K,316C,316M,316Yのそれぞれのインク吐出面316AK,316AC,316AM,316AYを、インクジェットヘッド316K,316C,316M,316Yの数よりも少ない数の検出装置370を用いて検出し、1つの検出装置370は1つのインク吐出面316A又は複数のインク吐出面316Aの検出を共通の撮像条件で同時に行っている。
【0179】
図21(a),(b)に図示した例においても、検出装置370は、各インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYに対して斜め方向からインク吐出面316AK,316AC,316AM,316AYを検出している。
【0180】
また、検出装置370は、インク吐出面316Aの直下(インク吐出面316Aの通過領域の直下)を避けて配置され、かつ、ブレード366(366K,366C,366M,366Y)から飛び散ったインクが付着する領域を避けて配置される。
【0181】
なお、検出装置370は、インクジェットヘッド316Kの外縁を鉛直方向に下ろした面の内側であり、インクジェットヘッド316Yの外縁鉛直方向に下ろした面の内側に配置されている。
【0182】
また、検出装置の撮像部の向き(撮像部の光軸の向き)をインク吐出面316AK,316AC,316AM,316AYと平行な面のいずれにも交わるように配置される。
【0183】
ここで、1つの検出装置370を用いて、複数のインクジェットヘッド316のインク吐出面316Aの異常検出を行う場合の課題について説明する。図22は、該課題を示す説明図である。
【0184】
インク吐出面316Aの異常検出では、数十から数百マイクロメートルの大きさを有する汚れや傷の有無が解析されるので、接写(近接撮像)や顕微鏡撮像(高倍率の拡大撮像)によって得られる程度の高精細の画像が必要になる。しかし、複数のインクジェットヘッド316のインク吐出面316Aを撮像可能領域に入れるには、検出装置370(撮像部)の性能の制約がある。
【0185】
広角撮影が可能な光学系を具備することも考えられるが、この場合は検出装置370をインク吐出面316Aにより近づける必要があり、インクジェットヘッド316の配置上の制約が存在する。
【0186】
また、図22に示すように、検出装置370と各インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYとの距離の違いがあり、検出装置370をインク吐出面316AK,316AC,316AM,316AYへ近づけると、距離の違いが拡大されてしまい、検出装置370からより離れているインクジェットヘッド316K,316Yは画像の歪みが大きくなって、高精細な画像を得ることが困難になる。
【0187】
そうすると、各インクジェットヘッド316K,316C,316M,316Yのインク吐出面316AK,316AC,316AM,316AYにおける合焦対象領域200(図9参照)の画像を合成する際に、歪みの補正が多くなり、画像の精度が落ちてしまうという課題が存在する。
【0188】
一方、図23に示すように、各インク吐出面316AK,316AC,316AM,316AYと検出装置370との距離を等しくすることが可能であるが、検出装置370の配置上の制約が生じてしまい、検出の要求精度を満足しつつ、検出装置370の配置上の制約を回避することは困難である。
【0189】
そこで、図24に示すように、望遠マクロ系の撮像部を備えた検出装置370’を備え、各インク吐出面316AK,316AC,316AM,316AYからある程度離した位置に検出装置370’を配置して、各インク吐出面316AK,316AC,316AM,316AYを検出装置370’の視野に入れつつ、各インク吐出面316AK,316AC,316AM,316AYと検出装置370’との距離がより短くなるように、検出装置370’の配置が調整される。
【0190】
すなわち、望遠マクロ系の撮像部を備える態様では、検出装置370’から観察面(インク吐出面316AK,316AC,316AM,316AYの合焦対象領域200)のまでの距離は離すが、インク吐出面316AK,316AC,316AM,316AY自体と検出装置370’との距離は離さなくてもよい。
【0191】
図24において、符号371KB,371CB,371MB,371YBを付して図示した一点破線は、各インク吐出面316AK,316AC,316AM,316AYのある撮像タイミングにおける合焦対象位置であり、矢印線は代表的な視野を表している。
【0192】
図25は、図24に図示した検出装置370’により得られた各インクジェットヘッド316K,316C,316M,316Y(図24参照)画像340K,340C,340M,340Yを示す説明図である。
【0193】
インク吐出面316AK,316AC,316AM,316AYごとに、検出装置370’の合焦対象面(図5参照)とインク吐出面との交線である合焦対象位置371KB,371CB,371MB,371YBが異なるので、合焦対象領域はインク吐出面316AK,316AC,316AM,316AYごとに決まる。
【0194】
ここで、撮像条件を設定する際に、検出装置370’の合焦対象面と各インク吐出面316AK,316AC,316AM,316AYが、インクジェットヘッド316K,316C,316M,316Yと検出装置370’との相対移動の最中に交差するように設定されていれば、各インク吐出面316AK,316AC,316AM,316AYの合焦対象領域の画像を一度に取得することが可能である。
【0195】
つまり、撮像条件を設定する際に、ある1つのヘッドに対して合焦対象面の距離を設定して合焦対象領域を設定し、残りのヘッドに対しては、当該ある1つのヘッドに対する設定を維持しつつ、各ヘッドに対する合焦対象領域が決められる。なお、合焦対象領域の平面形状や数は、ヘッドごとに異なることがありうる。
【0196】
合焦対象領域200(図9参照)の画像を合成する処理や、合焦対象領域の撮像データからインク吐出面316Aの異常を判断する処理は、先に説明した1つの検出装置70による1つのインク吐出面16Aの検出の処理を適用することができる。
【0197】
本応例に係るインク吐出面の異常検出によれば、1つの検出装置により複数のインクジェットヘッド316のインク吐出面316Aの異常検出を、共通の検出条件により同時に行うことができるので、メンテナンス処理部の構成を簡素化することができる。
【0198】
本発明の実施形態では、記録媒体上にカラー画像を形成するインクジェット記録装置に具備されるインクジェットヘッドのインク吐出面の異常検出を例に挙げて説明したが、本発明の適用範囲はインクジェット記録装置に限定されない。
【0199】
例えば、樹脂粒子や金属粒子を含有する機能性液体により、所定のパターン(マスクパターン、配線パターン)を形成するパターン形成装置なと、インクジェット方式により媒体上に液体を噴射させる液体吐出装置に広く適用することが可能である。
【0200】
また、上記の実施形態では、フルライン型のインクジェットヘッドのインク吐出面の異常検出を例に挙げて説明したが、本発明は、記録媒体の全幅に満たない流さにわたってノズルが配置されたシリアル型ヘッドにも適用可能である。
【0201】
さらに、本発明の趣旨を逸脱しない範囲で、適宜構成要件を変更、追加、削除することが可能である。
【0202】
〔付記〕
上記に詳述した発明の実施形態についての記載から把握されるとおり、本明細書は少なくとも以下に示す態様を含む多様な技術思想の開示を含んでいる。
【0203】
(第1態様):第1態様に係る検出装置は、インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、前記インクジェットヘッドと前記撮像手段とを相対的に移動させる相対移動手段と、前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、を備えている。
【0204】
第1の態様によれば、インクジェットヘッドの液体吐出面の直下を避けて配置される撮像手段により、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する際に、撮像手段により得られる撮像データの中から、ピントが合っている画像が得られる領域である合焦対象領域が設定され、撮像手段の合焦設定を維持しつつ、インクジェットヘッドと撮像手段とを相対的に移動させて、所定の時間間隔で液体吐出面を撮像するので、液体吐出面における撮像手段のピントが合っている画像が得られる領域を所定の時間間隔で撮像することができ、撮像手段の合焦設定を変更することなく液体吐出面の全面にわたる撮像データを取得することができる。
【0205】
また、合焦対象領域の撮像データが抽出され、この撮像データに基づいて液体吐出面の異常が検出されるので、撮像手段の撮像可能領域の全域にピントを合わせるための液体吐出面と撮像手段とを平行にするための精密な調整が不要となる。
【0206】
さらに、液体吐出面の直下を避けて撮像手段が配置されるので、液体吐出面から滴下する液体による撮像手段の汚染が回避される。
【0207】
撮像手段は、所定の撮像可能範囲を有する撮像素子と、撮像素子の撮像対象側に設けられる光学系と、を含む態様がある。また、撮像素子の撮像対象側にカラーフィルタを備える態様もある。
【0208】
液体吐出面の直下を避けた位置とは、液体吐出面の縁を水平面に投影させたときにできる液体吐出面と水平面と、液体吐出面の縁から水平面に達する面により囲まれた領域の外側である。
【0209】
少なくとも、撮像手段の撮像面が液体吐出面の直下を避けた位置に配置されなければよい。
【0210】
(第2態様):第2態様に係る検出装置は、前記撮像手段により連続撮像された撮像データから前記合焦対象領域の撮像データを抽出する抽出手段を備えている。
【0211】
かかる態様によれば、ピントが合っていない撮像領域の撮像データが含まれる撮像データの中からピントが合っている領域の撮像データが抽出されるので、ピントが合っている撮像データに基づいて、液体吐出面の異常が検出される。
【0212】
(第3態様):第3態様に係る検出装置は、前記抽出手段によって抽出された前記合焦対象領域の撮像データを時系列の順に合成して、前記液体吐出面の合成画像を生成する合成画像生成手段を備えている。
【0213】
かかる態様によれば、液体吐出面のより広い範囲のピントが合っている画像を得ることができる。
【0214】
(第4態様):第4態様に係る検出装置は、前記合成画像生成手段は、前記液体吐出面に設けられた基準位置を基準として、複数の前記合焦対象領域の撮像データを時系列の順に合成している。
【0215】
かかる態様によれば、合焦対象領域の画像を合成する際に、画像の欠落や重複を避けることができ、好ましい合成画像が形成される。
【0216】
基準位置は、液体吐出面の端部(端辺)でもよいし、液体吐出面に形成されたマーキングでもよい。さらに、液体吐出面に形成されるノズル(ノズル開口)の配置を利用してもよい。
【0217】
(第5態様):第5態様に係る検出装置は、前記撮像手段により一回の撮像により得られた撮像データから前記合焦対象領域の撮像データを抽出する抽出手段を備えている。
【0218】
かかる態様によれば、一回の撮像により得られる撮像データの単位で液体吐出面の異常を検出することができる。
【0219】
(第6態様):第6態様に係る検出装置は、前記異常情報生成手段は、予め記憶されている前記液体吐出面の正常時の画像と、前記合成画像生成手段により生成された液体吐出面の画像と、を比較した比較結果に基づいて、前記液体吐出面の異常情報を生成している。
【0220】
かかる態様によれば、正常と異常とを視覚的に判断することができ、異常の有無の判断が容易である。
【0221】
(第7態様):第7態様に係る検出装置は、前記データ処理手段は、前記液体吐出面における位置に対する前記合焦対象領域の撮像データのデータ値を表す検出信号を生成している。
【0222】
かかる態様によれば、撮像データから画像を生成する処理が不要となり、データ処理の負荷を軽減化しうる。
【0223】
かかる態様において、撮像データのデータ値を時系列順に合成して、相対移動方向における液体吐出面の位置に対する撮像データのデータ値の関係を表す検出信号を生成する態様がある。
【0224】
(第8態様):第8態様に係る検出装置は、異常情報生成手段は、前記検出信号のパターンの変化に基づいて前記液体吐出面の異常情報を生成している。
【0225】
かかる態様によれば、撮像データのデータ値の変動に基づいて、液体吐出面の異常を検出しうる。
【0226】
(第9態様):第9態様に係る液体吐出装置は、インクジェットヘッドと、前記インクジェットヘッドの液体吐出面の異常を検出する検出装置と、前記インクジェットヘッドと前記検出装置とを相対的に移動させる相対移動手段と、を備え、前記検出装置は、前記インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、を具備している。
【0227】
液体吐出装置とは、インクジェット方式により媒体上に所定の液体(液滴)を付与する装置であり、一例として、記録媒体上にカラー画像を形成するインクジェット記録装置が挙げられる。
【0228】
インクジェットヘッドには、媒体の全幅(媒体搬送方向と直交する方向における媒体の全長)に対応する長さのノズル群を有するフルライン型ヘッドや、媒体搬送方向に沿って複数のノズルが配置されたシリアル型ヘッドがある。
【0229】
相対移動手段には、固定されたインクジェットヘッドに対して撮像手段を移動させる態様、固定された撮像手段に対してインクジェットヘッドを移動させる態様、撮像手段及びインクジェットヘッドとも移動させる態様がある。
【0230】
(第10態様):第10態様に係る液体吐出装置は、前記検出装置は、検出面が前記相対移動手段の移動方向に対して斜め方向に向けて配置されている。
【0231】
かかる態様において、検出面が向けられる方向、及び相対移動手段の移動方向を液体吐出面と平行方向に投影したそれぞれの方向が交差する態様が好ましい。
【0232】
(第11態様):第11態様に係る液体吐出装置は、前記液体吐出面を払拭する払拭部材を備え、前記検出装置は、払拭部材から飛散した液体が付着しない位置に配置されている。
【0233】
かかる態様によれば、払拭部材から飛散される液体による検出装置の汚染を回避しうる。
【0234】
かかる態様における払拭部材の一例として、弾性変形させながら液体吐出面に接触させて、液体吐出面を払拭するブレードが挙げられる。ブレードの弾性変形が開放されるときに液体吐出面から拭き取られた液体が飛散することがあるので、ブレードが弾性変形状態から戻る方向を避けて検出装置が配置されればよい。
【0235】
かかる態様は、検出装置の前方に払拭部材が配置される場合に効果がある。
【0236】
(第12態様):第12態様に係る液体吐出装置は、前記検出装置は、前記インクジェットヘッドの液体吐出により飛散した液体が付着しない位置に配置されている。
【0237】
かかる態様によれば、インクジェットヘッドの液体吐出により飛散した液体(ミスト状液体)による検出装置の汚染を回避しうる。
【0238】
(第13態様):第13態様に係る液体吐出装置は、前記インクジェットヘッドにメンテナンス処理を施すメンテナンス処理手段と、前記検出装置から出力される前記異常情報に基づいて、前記メンテナンス手段の処理条件を設定する処理条件設定手段と、を備えている。
【0239】
かかる態様によれば、液体吐出面の異常の有無(汚れの付着の有無)に応じたインクジェットヘッドのメンテナンス処理を実行することができる。
【0240】
(第14態様):第14態様に係る液体吐出装置は、前記相対移動手段は、前記インクジェットヘッドの液体吐出位置と前記メンテナンス手段によるメンテナンス処理位置との間で、前記インクジェットヘッドと前記検出装置とを相対移動させ、前記検出装置は、メンテナンス処理前又はメンテナンス処理後の前記インクジェットヘッドの液体吐出面の異常検出を行っている。
【0241】
かかる態様によれば、メンテナンス処理前に液体吐出面を検出することで、液体吐出面の状態をメンテナンス処理に反映させることができる。また、メンテナンス処理後の液体吐出面を検出することで、液体吐出面のメンテナンスが適切に実行されたか否かを判断しうる。
【0242】
また、重量物であるインクジェットヘッドが一定速度でメンテナンス処理位置へ移動する際に、無停止で液体吐出面の全面にわたる撮像データを取得することができる。
【0243】
(第15態様):第15態様に係る液体吐出装置は、前記インクジェットヘッドを複数備えるとともに、前記インクジェットヘッドの数よりも少ない数の前記検出装置を備えている。
【0244】
かかる態様によれば、複数のインクジェットヘッドを備える装置において、より少ない検出装置によりすべてのインクジェットヘッドの液体吐出面の検出を実行することで、液体吐出面を検出する構成を小型化することができ、装置構成の簡素化に寄与しうる。
【0245】
かかる態様における撮像手段は、望遠マクロ系の光学系を具備する態様が好ましい。
【0246】
(第16態様):第16態様に係る液体吐出装置は、円筒形状を有し、前記インクジェットヘッドから吐出させた液体を受ける媒体を外周面に支持して前記円筒形状の中心軸を回転軸として回転させて、前記媒体を前記外周面に沿って搬送させる媒体搬送手段を備え、前記複数のインクジェットヘッドは、前記媒体搬送手段の外周面に対向する位置に配置され、前記相対移動手段は、前記複数のインクジェットヘッドを一括して前記検出装置に対して相対的に移動させている。
【0247】
かかる態様において、各インクジェットヘッドの液体吐出面が媒体搬送手段の外周面に向けて傾けられているので、媒体搬送手段の回転軸(中心軸)から水平面に対して直交する方向に伸ばした線上に撮像手段を配置させる態様がある。
【0248】
(第17態様):第17態様に係る液体吐出装置は、前記インクジェットヘッドは、フルライン型ヘッドであり、前記相対移動手段は、前記インクジェットヘッドの長手方向と略平行に前記インクジェットヘッドと前記検出装置とを相対的に移動させている。
【0249】
かかる態様おいて、撮像手段の一回の撮像おける撮像領域がインクジェットヘッド(液体吐出面)の短手方向の全長に対応することで、インクジェットヘッドと検出装置とをインクジェットヘッドの長手方向の全長にわたって一回だけ相対的に移動させることで、液体吐出面の全面の撮像が可能である。
【0250】
(第18態様):第18態様に係る液体吐出装置は、前記検出装置には、第2態様から第8態様のいずれかに記載の検出装置が含まれる。
【0251】
(第19態様):第19態様に係る液体吐出面の異常検出方法は、インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記インクジェットヘッドとを相対的に移動させて前記液体吐出面を撮像し、撮像結果に基づいて前記液体吐出面の異常を検出する液体吐出面の異常検出方法において、前記撮像手段を前記液体吐出面に合焦させる合焦設定工程と、前記撮像手段と相対的に移動される前記液体吐出面における前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定工程と、前記撮像手段の合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像する撮像工程と、前記撮像工程によって得られた撮像データに所定の処理を施すデータ処理工程と、前記データ処理工程によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成工程と、前記異常情報生成工程によって生成された前記液体吐出面の異常情報を出力する異常情報出力工程と、を含んでいる。
【0252】
かかる態様において、撮像工程により連続撮像された撮像データから合焦対象領域の撮像データを抽出する抽出工程を含む態様や、抽出工程によって抽出された合焦対象領域の撮像データを時系列の順に合成して、液体吐出面の合成画像を生成する合成画像生成工程を含む態様が好ましい。
【0253】
また、合成画像生成工程において、液体吐出面に設けられた基準位置を基準として、複数の前記合焦対象領域の撮像データを時系列の順に合成する態様が好ましい。
【0254】
さらに、撮像工程により一回の撮像により得られた撮像データから合焦対象領域の撮像データを抽出する抽出を含む態様も好ましい。
【0255】
かかる態様において、異常情報生成工程は、予め記憶されている液体吐出面の正常時の画像と、前記撮像手段によって得られた撮像データから生成された液体吐出面の画像と、を比較した比較結果に基づいて、液体吐出面の異常情報を生成する態様も好ましい。
【0256】
また、データ処理工程は、液体吐出面における位置に対する合焦対象領域の撮像データのデータ値を表す検出信号を生成し、異常情報生成工程において、検出信号のパターンの変化に基づいて液体吐出面の異常情報を生成する態様も好ましい。
【0257】
また、第20態様に係る液体吐出面の異常検出方法を含み、液体吐出面の異常情報に基づいて処理条件が設定されるインクジェットヘッドのメンテナンス方法も好ましい。
【符号の説明】
【0258】
10,300…インクジェット記録装置、16,16K,16C,16M,16Y,316,316K,316C,316M,316Y…インクジェットヘッド、16A,316A…インク吐出面、60…メンテナンス処理部、66…ブレード、68…払拭処理部、70…検出装置、71A…合焦対象面、72B,202…合焦対象位置102…システム制御部、126…メンテナンス制御部、128…異常検出部、140…撮像部、142…制御部、144…撮像条件設定部、146…データ処理部、150…情報出力部、176…デジタル信号処理部、200…合焦対象領域,201…撮像可能領域
【特許請求の範囲】
【請求項1】
インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、
前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、
前記インクジェットヘッドと前記撮像手段とを相対的に移動させる相対移動手段と、
前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、
前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、
前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、
前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、
前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、
を備えた検出装置。
【請求項2】
前記撮像手段により連続撮像された撮像データから前記合焦対象領域の撮像データを抽出する抽出手段を備えた請求項1に記載の検出装置。
【請求項3】
前記抽出手段によって抽出された前記合焦対象領域の撮像データを時系列の順に合成して、前記液体吐出面の合成画像を生成する合成画像生成手段を備えた請求項2に記載の検出装置。
【請求項4】
前記合成画像生成手段は、前記液体吐出面に設けられた基準位置を基準として、複数の前記合焦対象領域の撮像データを時系列の順に合成する請求項3に記載の検出装置。
【請求項5】
前記撮像手段により一回の撮像により得られた撮像データから前記合焦対象領域の撮像データを抽出する抽出手段を備えた請求項1に記載の検出装置。
【請求項6】
前記異常情報生成手段は、予め記憶されている前記液体吐出面の正常時の画像と、前記撮像手段によって得られた撮像データから生成された液体吐出面の画像と、を比較した比較結果に基づいて、前記液体吐出面の異常情報を生成する請求項3から5のいずれか1項に記載の検出装置。
【請求項7】
前記データ処理手段は、前記液体吐出面における位置に対する前記合焦対象領域の撮像データのデータ値を表す検出信号を生成する請求項1、2又は5に記載の検出装置。
【請求項8】
前記異常情報生成手段は、前記検出信号のパターンの変化に基づいて前記液体吐出面の異常情報を生成する請求項7に記載の検出装置。
【請求項9】
インクジェットヘッドと、
前記インクジェットヘッドの液体吐出面の異常を検出する検出装置と、
前記インクジェットヘッドと前記検出装置とを相対的に移動させる相対移動手段と、
を備え、
前記検出装置は、前記インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、
前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、
前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、
前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、
前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、
前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、
前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、
を具備する液体吐出装置。
【請求項10】
前記検出装置は、検出面が前記相対移動手段の移動方向に対して斜め方向に向けて配置される請求項9に記載の液体吐出装置。
【請求項11】
前記液体吐出面を払拭する払拭部材を備え、
前記検出装置は、払拭部材から飛散した液体が付着しない位置に配置される請求項9又は10に記載の液体吐出装置。
【請求項12】
前記検出装置は、前記インクジェットヘッドの液体吐出により飛散した液体が付着しない位置に配置される請求項9から11のいずれか1項に記載の液体吐出装置。
【請求項13】
前記インクジェットヘッドにメンテナンス処理を施すメンテナンス処理手段と、
前記検出装置から出力される前記異常情報に基づいて、前記メンテナンス手段の処理条件を設定する処理条件設定手段と、
を備えた請求項9から12のいずれか1項に記載の液体吐出装置。
【請求項14】
前記相対移動手段は、前記インクジェットヘッドの液体吐出位置と前記メンテナンス手段によるメンテナンス処理位置との間で、前記インクジェットヘッドと前記検出装置とを相対移動させ、
前記検出装置は、メンテナンス処理前又はメンテナンス処理後の前記インクジェットヘッドの液体吐出面の異常検出を行う請求項9から13のいずれか1項に記載の液体吐出装置。
【請求項15】
前記インクジェットヘッドを複数備えるとともに、前記インクジェットヘッドの数よりも少ない数の前記検出装置を備える請求項9から14のいずれか1項に記載の液体吐出装置。
【請求項16】
円筒形状を有し、前記インクジェットヘッドから吐出させた液体を受ける媒体を外周面に支持して前記円筒形状の中心軸を回転軸として回転させて、前記媒体を前記外周面に沿って搬送させる媒体搬送手段を備え、
前記複数のインクジェットヘッドは、前記媒体搬送手段の外周面に対向する位置に配置され、
前記相対移動手段は、前記複数のインクジェットヘッドを一括して前記検出装置に対して相対的に移動させる請求項9から15のいずれか1項に記載の液体吐出装置。
【請求項17】
前記インクジェットヘッドは、フルライン型ヘッドであり、
前記相対移動手段は、前記インクジェットヘッドの長手方向と略平行に前記インクジェットヘッドと前記検出装置とを相対的に移動させる請求項9から16のいずれか1項に記載の液体吐出装置。
【請求項18】
前記検出装置は、請求項2から8のいずれか1項に記載の検出装置を含む請求項9から17のいずれか1項に記載の液体吐出装置。
【請求項19】
インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記インクジェットヘッドとを相対的に移動させて前記液体吐出面を撮像し、撮像結果に基づいて前記液体吐出面の異常を検出する液体吐出面の異常検出方法において、
前記撮像手段を前記液体吐出面に合焦させる合焦設定工程と、
前記撮像手段と相対的に移動される前記液体吐出面における前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定工程と、
前記撮像手段の合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像する撮像工程と、
前記撮像工程によって得られた撮像データに所定の処理を施すデータ処理工程と、
前記データ処理工程によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成工程と、
前記異常情報生成工程によって生成された前記液体吐出面の異常情報を出力する異常情報出力工程と、
を含む液体吐出面の異常検出方法。
【請求項1】
インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、
前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、
前記インクジェットヘッドと前記撮像手段とを相対的に移動させる相対移動手段と、
前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、
前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、
前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、
前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、
前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、
を備えた検出装置。
【請求項2】
前記撮像手段により連続撮像された撮像データから前記合焦対象領域の撮像データを抽出する抽出手段を備えた請求項1に記載の検出装置。
【請求項3】
前記抽出手段によって抽出された前記合焦対象領域の撮像データを時系列の順に合成して、前記液体吐出面の合成画像を生成する合成画像生成手段を備えた請求項2に記載の検出装置。
【請求項4】
前記合成画像生成手段は、前記液体吐出面に設けられた基準位置を基準として、複数の前記合焦対象領域の撮像データを時系列の順に合成する請求項3に記載の検出装置。
【請求項5】
前記撮像手段により一回の撮像により得られた撮像データから前記合焦対象領域の撮像データを抽出する抽出手段を備えた請求項1に記載の検出装置。
【請求項6】
前記異常情報生成手段は、予め記憶されている前記液体吐出面の正常時の画像と、前記撮像手段によって得られた撮像データから生成された液体吐出面の画像と、を比較した比較結果に基づいて、前記液体吐出面の異常情報を生成する請求項3から5のいずれか1項に記載の検出装置。
【請求項7】
前記データ処理手段は、前記液体吐出面における位置に対する前記合焦対象領域の撮像データのデータ値を表す検出信号を生成する請求項1、2又は5に記載の検出装置。
【請求項8】
前記異常情報生成手段は、前記検出信号のパターンの変化に基づいて前記液体吐出面の異常情報を生成する請求項7に記載の検出装置。
【請求項9】
インクジェットヘッドと、
前記インクジェットヘッドの液体吐出面の異常を検出する検出装置と、
前記インクジェットヘッドと前記検出装置とを相対的に移動させる相対移動手段と、
を備え、
前記検出装置は、前記インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、
前記撮像手段を前記液体吐出面に合焦させる合焦設定手段と、
前記相対移動手段によって前記撮像手段と相対的に移動される前記液体吐出面における、前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定手段と、
前記合焦設定手段による合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像するように前記撮像手段の動作を制御する撮像制御手段と、
前記撮像手段から得られた撮像データに所定の処理を施すデータ処理手段と、
前記データ処理手段によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成手段と、
前記異常情報生成手段によって生成された前記液体吐出面の異常情報を出力する異常情報出力手段と、
を具備する液体吐出装置。
【請求項10】
前記検出装置は、検出面が前記相対移動手段の移動方向に対して斜め方向に向けて配置される請求項9に記載の液体吐出装置。
【請求項11】
前記液体吐出面を払拭する払拭部材を備え、
前記検出装置は、払拭部材から飛散した液体が付着しない位置に配置される請求項9又は10に記載の液体吐出装置。
【請求項12】
前記検出装置は、前記インクジェットヘッドの液体吐出により飛散した液体が付着しない位置に配置される請求項9から11のいずれか1項に記載の液体吐出装置。
【請求項13】
前記インクジェットヘッドにメンテナンス処理を施すメンテナンス処理手段と、
前記検出装置から出力される前記異常情報に基づいて、前記メンテナンス手段の処理条件を設定する処理条件設定手段と、
を備えた請求項9から12のいずれか1項に記載の液体吐出装置。
【請求項14】
前記相対移動手段は、前記インクジェットヘッドの液体吐出位置と前記メンテナンス手段によるメンテナンス処理位置との間で、前記インクジェットヘッドと前記検出装置とを相対移動させ、
前記検出装置は、メンテナンス処理前又はメンテナンス処理後の前記インクジェットヘッドの液体吐出面の異常検出を行う請求項9から13のいずれか1項に記載の液体吐出装置。
【請求項15】
前記インクジェットヘッドを複数備えるとともに、前記インクジェットヘッドの数よりも少ない数の前記検出装置を備える請求項9から14のいずれか1項に記載の液体吐出装置。
【請求項16】
円筒形状を有し、前記インクジェットヘッドから吐出させた液体を受ける媒体を外周面に支持して前記円筒形状の中心軸を回転軸として回転させて、前記媒体を前記外周面に沿って搬送させる媒体搬送手段を備え、
前記複数のインクジェットヘッドは、前記媒体搬送手段の外周面に対向する位置に配置され、
前記相対移動手段は、前記複数のインクジェットヘッドを一括して前記検出装置に対して相対的に移動させる請求項9から15のいずれか1項に記載の液体吐出装置。
【請求項17】
前記インクジェットヘッドは、フルライン型ヘッドであり、
前記相対移動手段は、前記インクジェットヘッドの長手方向と略平行に前記インクジェットヘッドと前記検出装置とを相対的に移動させる請求項9から16のいずれか1項に記載の液体吐出装置。
【請求項18】
前記検出装置は、請求項2から8のいずれか1項に記載の検出装置を含む請求項9から17のいずれか1項に記載の液体吐出装置。
【請求項19】
インクジェットヘッドの液体吐出面の直下を避けて配置され、前記液体吐出面に対して斜め方向から前記液体吐出面を撮像する撮像手段と、前記インクジェットヘッドとを相対的に移動させて前記液体吐出面を撮像し、撮像結果に基づいて前記液体吐出面の異常を検出する液体吐出面の異常検出方法において、
前記撮像手段を前記液体吐出面に合焦させる合焦設定工程と、
前記撮像手段と相対的に移動される前記液体吐出面における前記撮像手段の撮像可能な領域に前記液体吐出面上の合焦位置が含まれる合焦対象領域を設定する合焦対象領域設定工程と、
前記撮像手段の合焦設定を維持しつつ、前記インクジェットヘッドと前記撮像手段とを相対的に移動させながら、所定の時間間隔で前記液体吐出面を撮像する撮像工程と、
前記撮像工程によって得られた撮像データに所定の処理を施すデータ処理工程と、
前記データ処理工程によって処理された合焦対象領域の撮像データから前記液体吐出面の異常情報を生成する異常情報生成工程と、
前記異常情報生成工程によって生成された前記液体吐出面の異常情報を出力する異常情報出力工程と、
を含む液体吐出面の異常検出方法。
【図1】


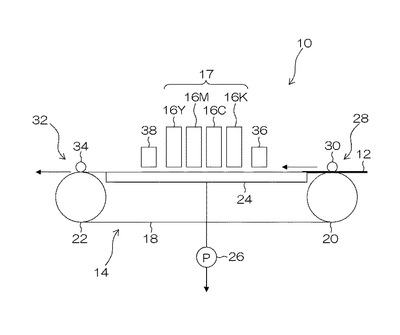
【図2】
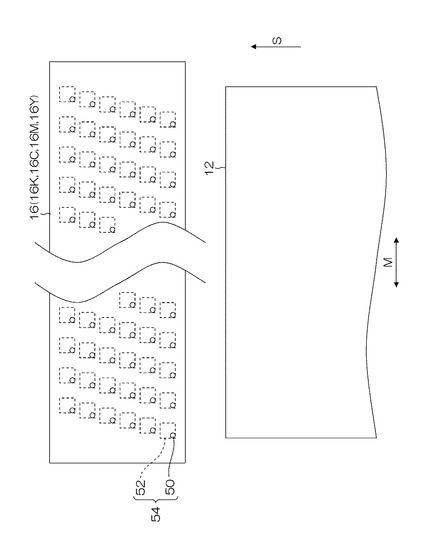
【図3】
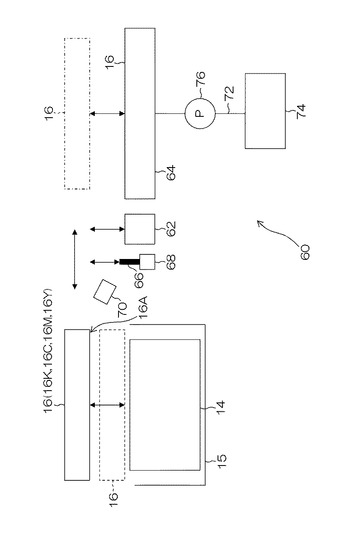
【図4】
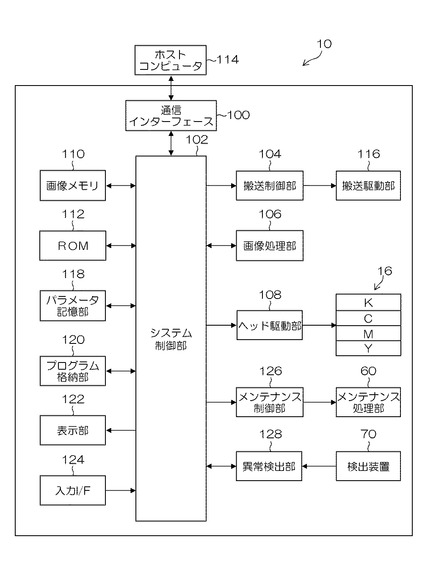
【図5】
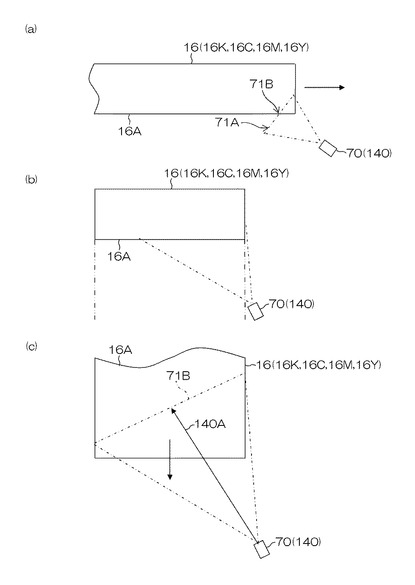
【図6】
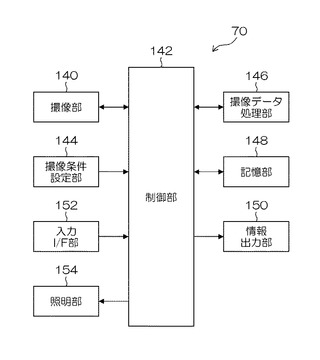
【図7】
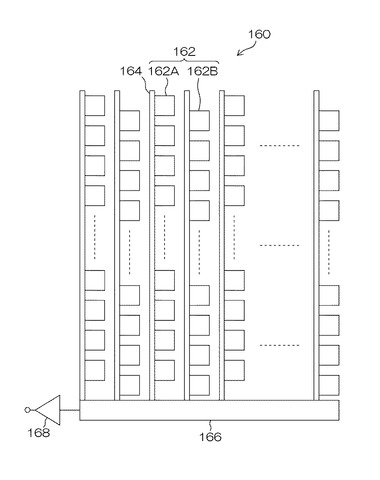
【図8】
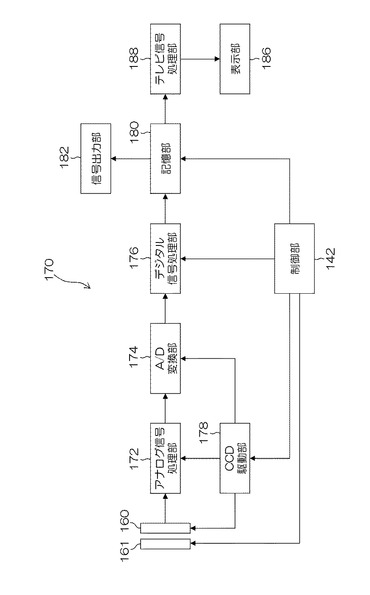
【図9】
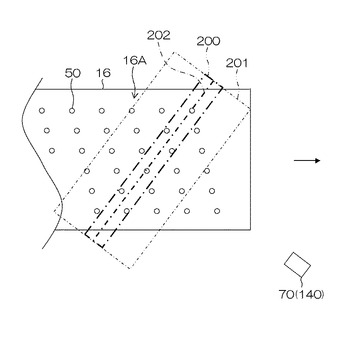
【図10】
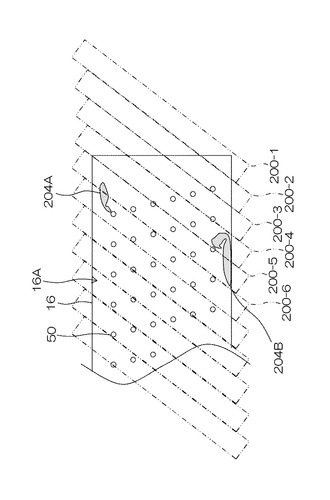
【図11】
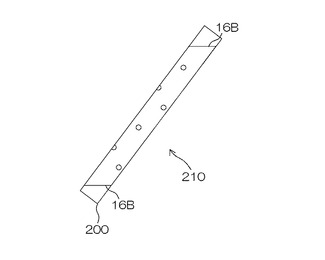
【図12】
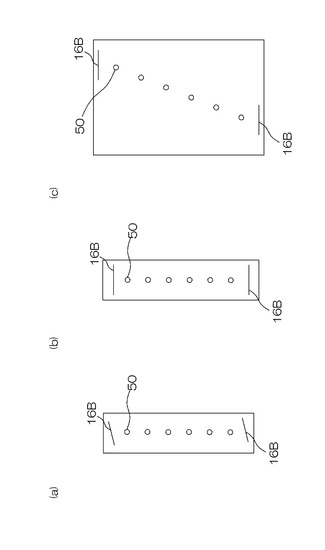
【図13】
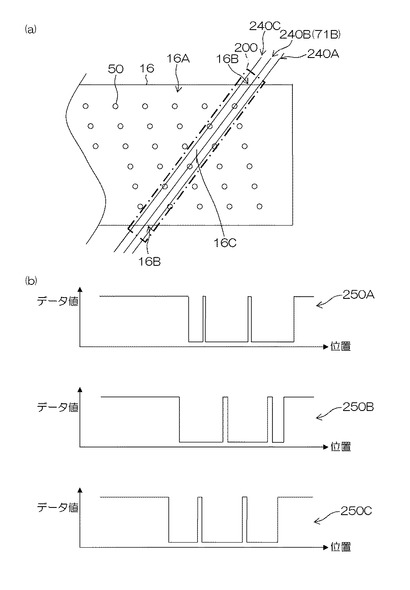
【図14】
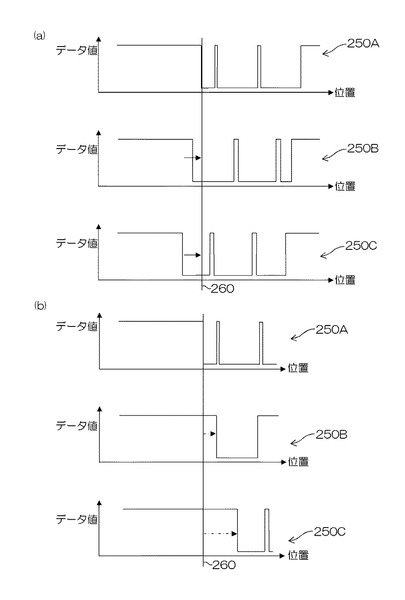
【図15】
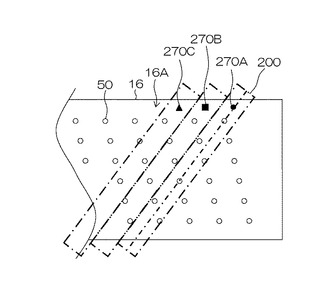
【図16】
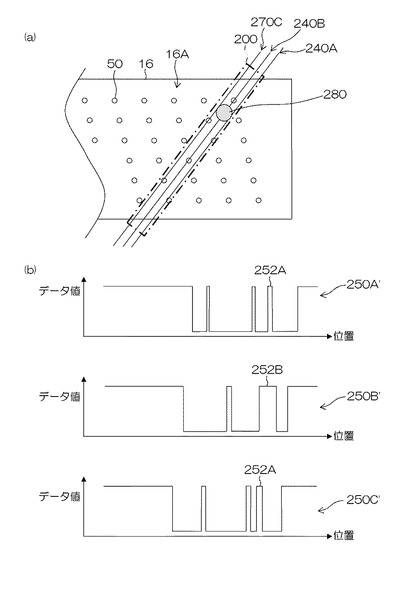
【図17】
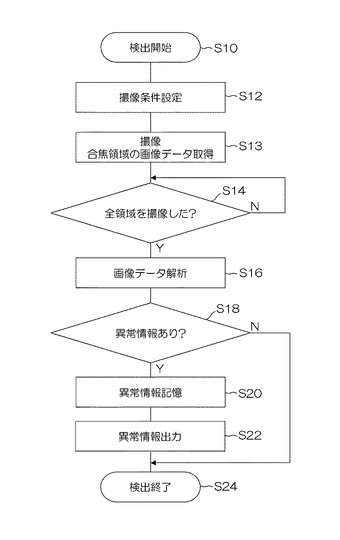
【図18】
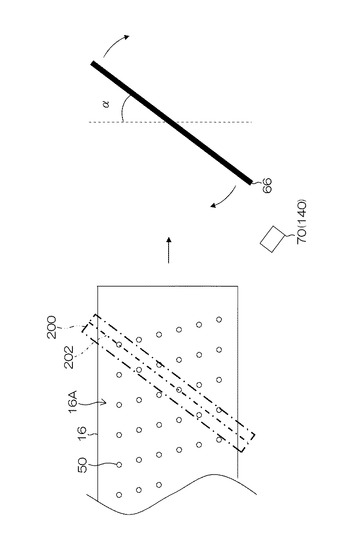
【図19】
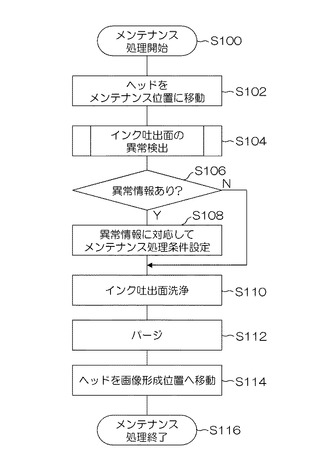
【図20】
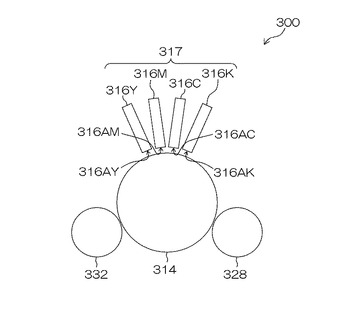
【図21】
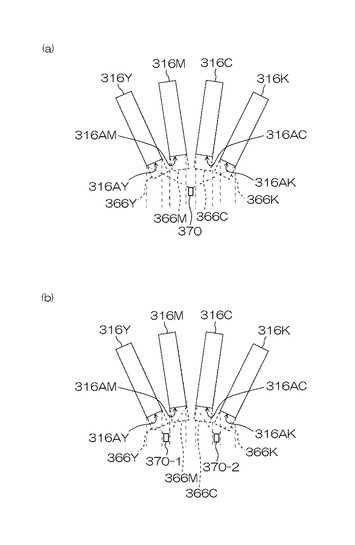
【図22】
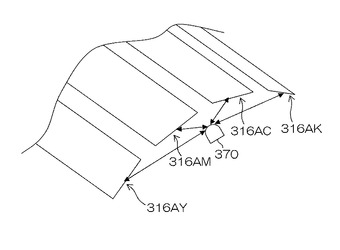
【図23】
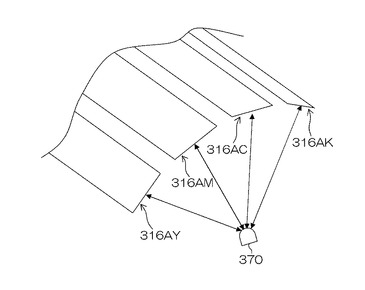
【図24】
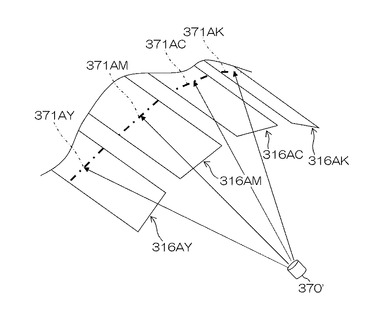
【図25】
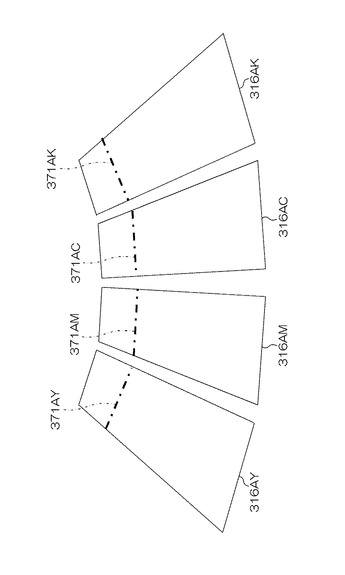
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2013−78852(P2013−78852A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−218564(P2011−218564)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
[ Back to top ]