
検出装置、移動体装置、パターン形成装置及びパターン形成方法、露光装置、及びデバイス製造方法
【課題】高精度なウエハステージの移動制御を行う。
【解決手段】ウエハステージの位置を計測するために用いられるスケール39Y2に対して検出装置PDY1の照射系69Aからの検出ビームを照射し、スケール39Y2を介した検出ビームを受光系69Bで検出することにより、スケールの表面状態(異物の存在状態)を検出する。これにより、スケールに対して非接触で表面状態の検出を行うことができる。さらに、この表面状態を考慮することで、ウエハステージの移動制御を高精度に行うことができる。
【解決手段】ウエハステージの位置を計測するために用いられるスケール39Y2に対して検出装置PDY1の照射系69Aからの検出ビームを照射し、スケール39Y2を介した検出ビームを受光系69Bで検出することにより、スケールの表面状態(異物の存在状態)を検出する。これにより、スケールに対して非接触で表面状態の検出を行うことができる。さらに、この表面状態を考慮することで、ウエハステージの移動制御を高精度に行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検出装置、移動体装置、パターン形成装置及びパターン形成方法、露光装置及びデバイス製造方法に係り、更に詳しくは、計測部材の表面状態を検出する検出装置、該検出装置を備える移動体装置、該移動体装置を備えるパターン形成装置、移動体に保持された物体上にパターンを形成するパターン形成方法、前記物体をエネルギビームで露光する露光装置、及び前記パターン形成方法を用いるデバイス製造方法に関する。
【背景技術】
【0002】
従来、半導体素子(集積回路等)、液晶表示素子等の電子デバイス(マイクロデバイス)を製造するリソグラフィ工程では、ステップ・アンド・リピート方式の投影露光装置(いわゆるステッパ)、ステップ・アンド・スキャン方式の投影露光装置(いわゆるスキャニング・ステッパ(スキャナとも呼ばれる))などが、主として用いられている。
【0003】
これらのステッパ、又はスキャナ等では、被露光基板(例えばウエハ)を保持するステージの位置計測は、高分解能なレーザ干渉計を用いて行われるのが、一般的である。しかるに、レーザ干渉計のビームの光路長は数百mm程度以上もある。また、半導体素子の高集積化に伴う、パターンの微細化により、より高精度なステージの位置制御性能が要求されるようになってきた。このような理由により、今や、レーザ干渉計のビーム路上の雰囲気の温度揺らぎ(空気揺らぎ)に起因する計測値の短期的な変動が無視できなくなりつつある。
【0004】
そこで、最近においては、ステージの位置を計測する装置として、レーザ干渉計よりも温度揺らぎ(空気揺らぎ)に起因する計測値の短期的な変動が小さいリニアエンコーダを用いる技術が提案されている(例えば、特許文献1参照)。このようなリニアエンコーダを用いる場合に、スケール上に異物が存在すると、その異物により計測誤差が生じたり、計測ができなくなったりするおそれがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2007/097379号
【発明の概要】
【課題を解決するための手段】
【0006】
本発明は、上述した事情の下になされたものであり、その第1の態様によれば、移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の、表面状態を検出する検出装置であって、前記計測部材に対して光ビームを照射する照射系と、前記計測部材を介した光ビームを検出する検出系と、を備える検出装置が提供される。
【0007】
これによれば、計測部材に対して非接触で表面状態の検出を行うことが可能である。
【0008】
本発明の第2の態様によれば、計測部材が設けられた移動体と、前記計測部材と対向するヘッドを有し、該ヘッドによって前記移動体の前記所定方向の位置情報を計測する計測装置と、前記計測部材の表面状態を検出する本発明の検出装置と、を備える第1の移動体装置が提供される。
【0009】
これによれば、検出装置により、計測部材に対して非接触で、計測部材の表面状態が検出されるので、検出装置の検出動作が移動体の移動の邪魔をすることが無い。また、計測部材の表面状態(異物の付着状態など)を考慮することで、該表面状態に起因する計測装置の計測精度の悪化を抑制することができ、これにより、高精度な移動体の移動制御を行うことが可能となる。
【0010】
本発明の第3の態様によれば、前記移動体が物体を保持する本発明の第1の移動体装置と、前記物体上にパターンを生成するパターン生成装置と、を備える第1のパターン形成装置が提供される。
【0011】
これによれば、移動体の位置制御(物体の位置制御)を精度良く行うことができるので、該移動体に保持された物体上に、パターン生成装置によりパターンを生成することで、物体上へ高精度なパターン生成を行うことが可能となる。
【0012】
本発明の第4の態様によれば、エネルギビームにより物体を露光して、前記物体にパターンを形成する露光装置であって、前記移動体が前記物体を保持する本発明の第1の移動体装置を備える第1の露光装置が提供される。
【0013】
これによれば、移動体の位置情報の計測を精度良く行うことができるので、該移動体に保持された物体に対してパターンを精度良く形成することが可能となる。
【0014】
本発明の第5の態様によれば、計測部材が設けられた移動体と、前記計測部材に対向するとき該計測部材に計測ビームを照射し、前記計測部材を介した前記計測ビームを受光するヘッドを有し、該ヘッドによって前記移動体の所定方向の位置情報を計測する計測装置と、前記計測部材の表面状態を検出する検出装置と、を備える第2の移動体装置が提供される。
【0015】
これによれば、検出装置により、計測部材の表面状態が検出されるので、計測部材の表面状態(異物の付着状態など)を考慮することで、該表面状態に起因する計測装置の計測精度の悪化を抑制することができる。これにより、高精度な移動体の移動制御を行うことが可能となる。
【0016】
本発明の第6の態様によれば、前記移動体が物体を保持する本発明の第2の移動体装置と、前記物体上にパターンを生成するパターン生成装置と、を備える第2のパターン形成装置が提供される。
【0017】
これによれば、移動体の位置制御(物体の位置制御)を精度良く行うことができるので、該移動体に保持された物体上に、パターン生成装置によりパターンを生成することで、物体上へ高精度なパターン生成を行うことが可能となる。
【0018】
本発明の第7の態様によれば、エネルギビームにより物体を露光して、前記物体にパターンを形成する露光装置であって、前記移動体が前記物体を保持する本発明の第2の移動体装置を備える第2の露光装置が提供される。
【0019】
これによれば、移動体の位置情報の計測を精度良く行うことができるので、該移動体に保持された物体に対してパターンを精度良く形成することが可能となる。
【0020】
本発明の第8の態様によれば、載置された物体を保持して所定の平面内を移動する移動体と、前記移動体の前記物体が載置された前記平面に平行な一面と対向するヘッドを有し、該ヘッドによって前記移動体の前記一面の前記物体の載置領域外の領域に計測ビームを照射することで、前記移動体の所定方向の位置情報を計測する計測装置と、前記移動体の前記一面の前記物体の載置領域外の領域の表面状態を検出する検出装置と、を備える第3の移動体装置が提供される。
【0021】
これによれば、検出装置により、移動体の一面の物体の載置領域外の領域の表面状態が検出されるので、計測装置からの検出ビームが照射される、移動体の一面の物体の載置領域外の領域の表面状態(異物の付着状態など)を考慮することで、該表面状態に起因する計測装置の計測精度の悪化を抑制することができる。これにより、高精度な移動体の所定方向の位置制御を行うことが可能となる。
【0022】
本発明の第9の態様によれば、本発明の第3の移動体装置と、前記移動体に載置された物体上にパターンを生成するパターン生成装置と、を備える第3のパターン形成装置である。
【0023】
これによれば、移動体の位置制御(物体の位置制御)を精度良く行うことができるので、該移動体に保持された物体上に、パターン生成装置によりパターンを生成することで、物体上へ高精度なパターン生成を行うことが可能となる。
【0024】
本発明の第10の態様によれば、移動体に保持された物体上にパターンを形成するパターン形成工程と、前記移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の表面状態を検出する検出工程と、を含む第1のパターン形成方法が提供される。
【0025】
これによれば、計測部材の表面状態(異物の付着状態など)による影響を回避した状態で、物体上へのパターン生成を高精度に行うことが可能となる。
【0026】
本発明の第11の態様によれば、移動体に保持された物体上にパターンを形成するパターン形成工程と、前記移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の表面上に存在する異物を除去する異物除去工程と、を含む第2のパターン形成方法が提供される。
【0027】
これによれば、異物除去工程において、移動体に設けられた計測部材に存在する異物を除去するので、パターン形成工程において、計測部材に存在する異物の影響を受けることなく、物体上にパターンを形成することが可能となる。
【0028】
本発明の第12の態様によれば本発明の第1又は第2のパターン形成方法により物体上にパターンを形成する工程と、パターンが形成された前記物体に処理を施す工程と、を含むデバイス製造方法が提供される。
【図面の簡単な説明】
【0029】
【図1】一実施形態に係る露光装置を示す概略図である。
【図2】図1のステージ装置を示す平面図である。
【図3】図1の露光装置が備える各種計測装置(エンコーダ、アライメント系、多点AF系など)の配置を示す平面図である。
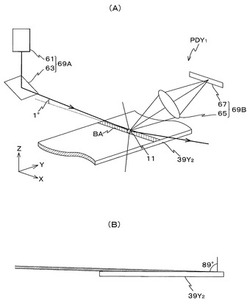
【図4】図4(A)は、図3の検出装置の構成を示す斜視図であり、図4(B)は、図4(A)の送光系から射出される検出ビームのスケールに対する入射状態を示す図である。
【図5】一実施形態に係る露光装置の制御系の主要な構成を示すブロック図である。
【図6】図6(A)及び図6(B)は、アレイ状に配置された複数のヘッドをそれぞれ含む複数のエンコーダによるウエハステージのXY平面内の位置計測及びヘッド間の計測値の引き継ぎについて説明するための図である。
【図7】図7(A)は、エンコーダの構成の一例を示す図、図7(B)は、検出光として格子RGの周期方向に長く延びる断面形状のレーザビームLBが用いられた場合を示す図である。
【図8】ウエハステージ上のウエハに対するステップ・アンド・スキャン方式の露光が行われている状態のウエハステージ及び計測ステージの状態を示す図である。
【図9】ウエハステージ側で、ウエハに対する露光が終了した段階のウエハステージ及び計測ステージの状態を示す図である。
【図10】露光終了後に、ウエハステージと計測ステージとが離間した状態から両ステージが接触する状態に移行した直後の両ステージの状態を示す図である。
【図11】ウエハステージと計測ステージとのY軸方向の位置関係を保ちつつ、計測ステージが−Y方向に移動し、ウエハステージがアンローディングポジションに向けて移動しているときの両ステージの状態を示す図である。
【図12】計測ステージがSec-BCHK(インターバル)を行う位置に到達したときのウエハステージと計測ステージとの状態を示す図である。
【図13】Sec-BCHK(インターバル)が行われるのと並行して、ウエハステージがアンロードポジションからローディングポジションに移動したときのウエハステージと計測ステージとの状態を示す図である。
【図14】計測ステージが最適スクラム待機位置へ移動し、ウエハがウエハステージ上にロードされたときのウエハステージと計測ステージとの状態を示す図である。
【図15】計測ステージが最適スクラム待機位置で待機中に、ウエハステージがPri-BCHKの前半の処理を行う位置へ移動したときの両ステージの状態を示す図である。
【図16】アライメント系AL1,AL22,AL23を用いて、3つのファーストアライメントショット領域に付設されたアライメントマークを同時検出しているときのウエハステージと計測ステージとの状態を示す図である。
【図17】アライメント系AL1,AL21〜AL24を用いて、5つのセカンドアライメントショット領域に付設されたアライメントマークを同時検出しているときのウエハステージと計測ステージとの状態を示す図である。
【図18】アライメント系AL1,AL21〜AL24を用いて、5つのサードアライメントショット領域に付設されたアライメントマークを同時検出しているときのウエハステージと計測ステージとの状態を示す図である。
【図19】アライメント系AL1,AL22,AL23を用いて、3つのフォースアライメントショット領域に付設されたアライメントマークを同時検出しているときのウエハステージと計測ステージとの状態を示す図である。
【図20】フォーカスマッピングが終了したときのウエハステージと計測ステージとの状態を示す図である。
【図21】露光動作中のウエハステージと計測ステージとの状態を示す図である。
【発明を実施するための形態】
【0030】
以下、本発明の一実施形態を図1〜図21に基づいて説明する。
【0031】
図1には、一実施形態に係る露光装置100の構成が概略的に示されている。この露光装置100は、ステップ・アンド・スキャン方式の投影露光装置、すなわちスキャナである。後述するように本実施形態では、投影光学系PLが設けられており、以下においては、この投影光学系PLの光軸AXと平行な方向をZ軸方向、これに直交する面内でレチクルとウエハとが相対走査される方向をY軸方向、Z軸及びY軸に直交する方向をX軸方向とし、X軸、Y軸、及びZ軸回りの回転(傾斜)方向をそれぞれθx、θy、及びθz方向として説明を行う。
【0032】
露光装置100は、照明系10、該照明系10からの露光用照明光(以下、「照明光」又は「露光光」と呼ぶ)ILにより照明されるレチクルRを保持するレチクルステージRST、レチクルRから射出された照明光ILをウエハW上に投射する投影光学系PLを含む投影ユニットPU、ウエハステージWST及び計測ステージMSTを有するステージ装置50、及びこれらの制御系等を備えている。ウエハステージWST上には、ウエハWが載置されている。
【0033】
照明系10は、例えば特開2001−313250号公報(対応する米国特許出願公開第2003/0025890号明細書)などに開示されるように、光源と、オプティカルインテグレータ等を含む照度均一化光学系、レチクルブラインド等(いずれも不図示)を有する照明光学系とを含んでいる。この照明系10では、レチクルブラインド(マスキングシステム)で規定されたレチクルR上のスリット状の照明領域IARを照明光(露光光)ILによりほぼ均一な照度で照明する。ここで、照明光ILとしては、一例としてArFエキシマレーザ光(波長193nm)が用いられている。また、オプティカルインテグレータとしては、例えばフライアイレンズ、ロッドインテグレータ(内面反射型インテグレータ)あるいは回折光学素子などを用いることができる。
【0034】
レチクルステージRST上には、回路パターンなどがそのパターン面(図1における下面)に形成されたレチクルRが、例えば真空吸着により固定されている。レチクルステージRSTは、例えばリニアモータ等を含むレチクルステージ駆動系11(図1では不図示、図5参照)によって、XY平面内で微少駆動可能であるとともに、走査方向(図1における紙面内左右方向であるY軸方向)に指定された走査速度で駆動可能となっている。レチクルステージRSTの位置情報は、レチクル干渉計116によって常時計測されている。
【0035】
投影ユニットPUは、レチクルステージRSTの図1における下方に配置されている。投影ユニットPUは、鏡筒40と、該鏡筒40内に所定の位置関係で保持された複数の光学素子を有する投影光学系PLとを含む。投影光学系PLとしては、例えばZ軸方向と平行な光軸AXに沿って配列される複数のレンズ(レンズエレメント)から成る屈折光学系が用いられている。投影光学系PLは、例えば両側テレセントリックで所定の投影倍率(例えば1/4倍、1/5倍又は1/8倍など)を有する。このため、照明系10からの照明光ILによって照明領域IARが照明されると、投影光学系PLの第1面(物体面)とパターン面がほぼ一致して配置されるレチクルRを通過した照明光ILにより、投影光学系PL(投影ユニットPU)を介してその照明領域IAR内のレチクルRの回路パターンの縮小像(回路パターンの一部の縮小像)が、その第2面(像面)側に配置される、表面にレジスト(感光剤)が塗布されたウエハW上の前記照明領域IARに共役な領域(以下、「露光領域」とも呼ぶ)IAに形成される。不図示ではあるが、投影ユニットPUは、防振機構を介して3本の支柱で支持される鏡筒定盤に搭載されている。しかし、これに限らず、例えば国際公開第2006/038952号に開示されているように、投影ユニットPUの上方に配置される不図示のメインフレーム部材、あるいはレチクルステージRSTが配置されるベース部材などに対して投影ユニットPUを吊り下げ支持しても良い。
【0036】
なお、本実施形態の露光装置100では、液浸法を適用した露光が行われるので、ペッツヴァルの条件を満足し、かつ投影光学系の大型化を避けるために、ミラーとレンズとを含む反射屈折系(カタディ・オプトリック系)を用いても良い。
【0037】
また、本実施形態の露光装置100では、液浸法を適用した露光を行うため、投影光学系PLを構成する最も像面側(ウエハW側)の光学素子、ここではレンズ(以下、「先端レンズ」ともいう)191を保持する鏡筒40の下端部周囲を取り囲むように、局所液浸装置8の一部を構成するノズルユニット32が設けられている。本実施形態では、ノズルユニット32は、図1に示されるように、その下端面が先端レンズ191の下端面とほぼ同一面に設定されている。また、ノズルユニット32は、液体Lqの供給口及び回収口と、ウエハWが対向して配置され、かつ回収口が設けられる下面と、液体供給管31A及び液体回収管31Bとそれぞれ接続される供給流路及び回収流路とを備えている。
【0038】
本実施形態においては、液体供給管31A、供給流路、及び供給口を介して、液体供給装置5(図1では不図示、図5参照)から先端レンズ191とウエハWとの間に液体が供給されるとともに、回収口、回収流路、及び液体回収管31Bを介して、液体回収装置6(図1では不図示、図5参照)によって、先端レンズ191とウエハWとの間から液体が回収されることにより、先端レンズ191とウエハWとの間に、一定量の液体Lq(図1参照)が保持される。この場合、先端レンズ191とウエハWとの間に保持された液体Lqは、常に入れ替わっている。
【0039】
本実施形態では、上記の液体として、ArFエキシマレーザ光(波長193nmの光)が透過する純水(以下、特に必要な場合を除いて、単に「水」と記述する)を用いるものとする。ArFエキシマレーザ光に対する水の屈折率nは、ほぼ1.44である。この水の中では、照明光ILの波長は、193nm×1/n=約134nmに短波長化される。
【0040】
上記の説明から明らかなように、本実施形態では、ノズルユニット32、液体供給装置5、液体回収装置6、液体供給管31A及び液体回収管31B等を含み、局所液浸装置8が構成されている。なお、局所液浸装置8の一部、例えば少なくともノズルユニット32は、投影ユニットPUを保持するメインフレーム(前述の鏡筒定盤を含む)に吊り下げ支持されても良いし、メインフレームとは別のフレーム部材に設けても良い。あるいは、前述の如く投影ユニットPUが吊り下げ支持される場合は、投影ユニットPUと一体にノズルユニット32を吊り下げ支持しても良いが、本実施形態では投影ユニットPUとは独立に吊り下げ支持される計測フレームにノズルユニット32を設けている。この場合、投影ユニットPUを吊り下げ支持していなくても良い。
【0041】
なお、投影ユニットPU下方に計測ステージMSTが位置する場合にも、上記と同様に後述する計測ステージと先端レンズ191との間に水を満たすことが可能である。
【0042】
図1に戻り、ステージ装置50は、ベース盤12上に配置されたウエハステージWST及び計測ステージMST、これらのステージWST,MSTの位置情報を計測するY軸干渉計16,18を含む干渉計システム118(図5参照)、及び露光の際などにウエハステージWSTの位置情報を計測するのに用いられるエンコーダシステム200(図5参照)、ステージWST,MSTを駆動するステージ駆動系124(図5参照)、並びに後述する検出装置PDX1〜PDX4、PDY1、PDY2(図3及び図5等参照)などを備えている。
【0043】
ウエハステージWST,計測ステージMSTそれぞれの底面には、不図示の非接触軸受、例えば真空予圧型空気静圧軸受(以下、「エアパッド」と呼ぶ)が複数ヶ所に設けられており、これらのエアパッドからベース盤12の上面に向けて噴出された加圧空気の静圧により、ベース盤12上でウエハステージWST,計測ステージMSTが数μm程度のクリアランスを介して非接触で支持されている。また、ステージWST,MSTは、ステージ駆動系124によって、互いに独立して少なくともY軸方向及びX軸方向に駆動可能である。
【0044】
ウエハステージWSTには、ウエハWを真空吸着等によって保持するウエハホルダ(不図示)が設けられている。ウエハホルダはウエハステージWSTと一体に形成しても良いが、本実施形態ではウエハホルダとウエハステージWSTとを別々に構成し、例えば真空吸着などによってウエハホルダをウエハステージWSTの凹部内に固定している。また、ウエハステージWSTの上面には、ウエハホルダ上に載置されるウエハの表面とほぼ同一面となる、液体Lqに対して撥液化処理された表面(撥液面)を有し、かつ外形(輪郭)が矩形でその中央部にウエハホルダ(ウエハの載置領域)よりも一回り大きな円形の開口が形成されたプレート(撥液板)28が設けられている。プレート28は、低熱膨張率の材料、例えばガラス又はセラミックス(ショット社のゼロデュア(商品名)、Al2O3あるいはTiCなど)から成り、その表面には、例えばフッ素樹脂材料、ポリ四フッ化エチレン(テフロン(登録商標))等のフッ素系樹脂材料、アクリル系樹脂材料あるいはシリコン系樹脂材料などにより撥液膜が形成される。さらにプレート28は、ステージ装置50の平面図である図2に示されるように、円形の開口を囲む、外形(輪郭)が矩形の第1撥液領域28aと、第1撥液領域28aの周囲に配置される矩形枠状(環状)の第2撥液領域28bとを有する。第1撥液領域28aには、例えば露光動作時、ウエハの表面からはみ出す液浸領域14(例えば図3参照)の少なくとも一部が形成され、第2撥液領域28bには、後述のエンコーダシステムのためのスケールが形成される。なお、プレート28はその表面の少なくとも一部がウエハの表面と同一面でなくても良い、すなわち異なる高さであっても良い。また、プレート28は単一のプレートでも良いが、本実施形態では複数のプレート、例えば第1及び第2撥液領域28a、28bにそれぞれ対応する第1及び第2撥液板が組み合わせて構成される。本実施形態では、前述の如く液体Lqとして純水を用いるので、以下では第1及び第2撥液領域28a、28bをそれぞれ第1及び第2撥水板28a、28bとも呼ぶ。
【0045】
この場合、内側の第1撥水板28aには、露光光ILが照射されるのに対し、外側の第2撥水板28bには、露光光ILが殆ど照射されない。このことを考慮して、本実施形態では、第1撥水版28aの表面には、露光光IL(この場合、真空紫外域の光)に対する耐性が十分にある撥水コートが施された第1撥水領域が形成され、第2撥水板28bには、その表面に第1撥水領域に比べて露光光ILに対する耐性が劣る撥水コートが施された第2撥水領域が形成されている。一般にガラス板には、露光光IL(この場合、真空紫外域の光)に対する耐性が十分にある撥水コートを施し難いので、このように第1撥水板28aとその周囲の第2撥水板28bとの2つの部分に分離することは効果的である。なお、これに限らず、同一のプレートの上面に露光光ILに対する耐性が異なる2種類の撥水コートを施して、第1撥水領域、第2撥水領域を形成しても良い。また、第1及び第2撥水領域で撥水コートの種類が同一でも良い。例えば、同一のプレートに1つの撥水領域を形成するだけでも良い。
【0046】
また、図2から明らかなように、第1撥水板28aの+Y側の端部には、そのX軸方向の中央部に長方形の切り欠きが形成され、この切り欠きと第2撥水板28bとで囲まれる長方形の空間の内部(切り欠きの内部)に計測プレート30が埋め込まれている。計測プレート30の長手方向の中央(ウエハステージWSTのセンターラインLL上)には、基準マークFMが形成されるとともに、該基準マークFMのX軸方向の一側と他側に、基準マークの中心に関して対称な配置で一対の空間像計測スリットパターン(スリット状の計測用パターン)SLが形成されている。各空間像計測スリットパターンSLとしては、一例として、Y軸方向とX軸方向とに沿った辺を有するL字状のスリットパターン、あるいはX軸及びY軸方向にそれぞれ延びる2つの直線状のスリットパターンなどを用いることができる。これら空間像計測スリットパターンSL下方のウエハステージWSTの内部には、スリットパターンSLとともに空間像計測装置45(図5参照)を構成する光学系等が設けられている。
【0047】
第2撥水板28bは、実際には、図7(A)に示されるように、2枚の板状部材29a,29bが貼り合わされて形成されている。このうち、下側の板状部材29bの上面(+Z側の面)には、その4辺のそれぞれに沿って所定ピッチで回折格子RGの多数の格子線が設けられている。これについて更に詳述すると、図2に示されるように、第2撥水板28b(板状部材29b)のX軸方向一側と他側(図2における上下両側)の領域には、Yスケール39Y1,39Y2がそれぞれ形成されている。Yスケール39Y1,39Y2はそれぞれ、例えばX軸方向を長手方向とする格子線が所定ピッチでY軸に平行な方向(Y軸方向)に沿って形成される、Y軸方向を周期方向とする反射型の格子(例えば回折格子)によって構成されている。同様に、第2撥水板28bのY軸方向一側と他側(図2における左右両側)の領域には、Xスケール39X1,39X2がそれぞれ形成されている。Xスケール39X1,39X2はそれぞれ、例えばY軸方向を長手方向とする格子線が所定ピッチでX軸に平行な方向(X軸方向)に沿って形成される、X軸方向を周期方向とする反射型の格子(例えば回折格子)によって構成されている。本実施形態では、第2撥水板28bを上記のように2枚の板状部材29a,29bで構成することで、上側の板状部材29aが回折格子RGをカバーするので、回折格子RGの損傷等を防止することが可能となっている。なお、図2では、図示の便宜上から、格子のピッチは、実際のピッチに比べて格段に広く図示されている。その他の図においても同様である。
【0048】
ウエハステージWSTの−Y端面,−X端面には、それぞれ鏡面加工が施され、図2に示される反射面17a,反射面17bが形成されている。干渉計システム118(図5参照)のY軸干渉計16及びX軸干渉計126(図1では、X軸干渉計126は不図示、図2参照)は、反射面17a,17bにそれぞれ干渉計ビーム(測長ビーム)を投射して、それぞれの反射光を受光することにより、各反射面の基準位置(一般には投影ユニットPU側面に固定ミラーを配置し、そこを基準面とする)からの変位、すなわちウエハステージWSTのXY平面内の位置情報を計測し、この計測値が主制御装置20に供給される。本実施形態では、Y軸干渉計16及びX軸干渉計126として、ともに光軸を複数有する多軸干渉計が用いられている。Y軸干渉計16及びX軸干渉計126の計測値に基づいて、主制御装置20は、ウエハステージWSTのX,Y位置に加え、θx方向の回転情報(すなわちピッチング)、θy方向の回転情報(すなわちローリング)、及びθz方向の回転情報(すなわちヨーイング)も計測可能である。但し、本実施形態では、ウエハステージWSTのXY平面内の位置情報(θz方向の回転情報を含む)は、主として、上述したYスケール、Xスケールなどを用いる、後述するエンコーダシステムの各エンコーダによって計測される。そして、干渉計16,126の計測値は、各エンコーダの計測値の長期的変動(例えばスケールの経時的な変形などによる)を補正(較正)する場合などに補助的に用いられる。また、Y軸干渉計16は、ウエハ交換のため、後述するアンローディングポジション、及びローディングポジション付近においてウエハステージWSTのY位置等を計測するのに用いられる。また、例えばローディング動作とアライメント動作との間、及び/又は露光動作とアンローディング動作との間におけるウエハステージWSTの移動においても、干渉計システム118の計測情報、すなわち5自由度の方向(X軸、Y軸、θx、θy及びθz方向)の位置情報の少なくとも1つが用いられる。なお、干渉計システム118はその少なくとも一部(例えば、光学系など)が、投影ユニットPUを保持するメインフレームに設けられる、あるいは前述の如く吊り下げ支持される投影ユニットPUと一体に設けられても良いが、本実施形態では前述した計測フレームに設けられるものとする。
【0049】
なお、本実施形態では、ウエハステージWSTとして、6自由度で移動可能な単一のステージを採用したが、ウエハステージWSTとして、XY平面内で自在に移動可能なステージ本体と、該ステージ本体上に搭載され、ステージ本体に対してZ軸方向、θx方向、及びθy方向に相対的に微小駆動可能なウエハテーブルとを含む構成を採用しても良い。また、反射面17a,反射面17bの代わりに、ウエハステージWSTに平面ミラーから成る移動鏡を設けても良い。さらに、投影ユニットPUに設けられる固定ミラーの反射面を基準面としてウエハステージWSTの位置情報を計測するものとしたが、その基準面を配置する位置は投影ユニットPUに限られるものでないし、必ずしも固定ミラーを用いてウエハステージWSTの位置情報を計測しなくても良い。
【0050】
また、本実施形態では、干渉計システム118によって計測されるウエハステージWSTの位置情報が、後述の露光動作やアライメント動作などでは用いられず、主として各エンコーダのキャリブレーション動作(すなわち、計測値の較正)などに用いられるものとしたが、干渉計システム118の計測情報(すなわち、5自由度の方向の位置情報の少なくとも1つ)を、例えば露光動作及び/又はアライメント動作などで用いても良い。本実施形態では、エンコーダシステムは、少なくとも3つのエンコーダにより、ウエハステージWSTの3自由度の方向、すなわちX軸、Y軸及びθz方向の位置情報を計測する。そこで、露光動作などにおいて、干渉計システム118の計測情報のうち、エンコーダによるウエハステージWSTの位置情報の計測方向(X軸、Y軸及びθz方向)と異なる方向、例えばθx方向及び/又はθy方向に関する位置情報のみを用いても良いし、その異なる方向の位置情報に加えて、エンコーダの計測方向と同じ方向(すなわち、X軸、Y軸及びθz方向の少なくとも1つ)に関する位置情報を用いても良い。また、干渉計システム118はウエハステージWSTのZ軸方向の位置情報を計測可能としても良い。この場合、露光動作などにおいてZ軸方向の位置情報を用いても良い。
【0051】
計測ステージMSTは、各種計測用部材を有しており、6自由度方向に駆動可能とされている。計測用部材としては、例えば、図2に示されるように、投影光学系PLの像面上で照明光ILを受光するピンホール状の受光部を有する照度むらセンサ94、投影光学系PLにより投影されるパターンの空間像(投影像)を計測する空間像計測器96、及び例えば国際公開第03/065428号などに開示されているシャック−ハルトマン(Shack-Hartman)方式の波面収差計測器98などが採用されている。波面収差計測器98としては、例えば国際公開第99/60361号(対応欧州特許第1,079,223号)に開示されるものも用いることができる。
【0052】
照度むらセンサ94としては、例えば特開昭57−117238号公報(対応する米国特許第4,465,368号明細書)などに開示されるものと同様の構成のものを用いることができる。また、空間像計測器96としては、例えば特開2002−14005号公報(対応する米国特許出願公開第2002/0041377号明細書)などに開示されるものと同様の構成のものを用いることができる。なお、本実施形態では3つの計測用部材(94、96、98)を計測ステージMSTに設けるものとしたが、計測用部材の種類、及び/又は数などはこれに限られない。計測用部材として、例えば投影光学系PLの透過率を計測する透過率計測器、及び/又は、前述の局所液浸装置8、例えばノズルユニット32(あるいは先端レンズ191)などを観察する計測器などを用いても良い。さらに、計測用部材と異なる部材、例えばノズルユニット32、先端レンズ191などを清掃する清掃部材などを計測ステージMSTに搭載しても良い。
【0053】
上記各センサに加え、例えば特開平11−16816号公報(対応する米国特許出願公開第2002/0061469号明細書)などに開示される、投影光学系PLの像面上で照明光ILを受光する所定面積の受光部を有する照度モニタを採用しても良く、この照度モニタもセンターライン上に配置することが望ましい。
【0054】
なお、本実施形態では、投影光学系PLと液体(水)Lqとを介して露光光(照明光)ILによりウエハWを露光する液浸露光が行われるのに対応して、照明光ILを用いる計測に使用される上記の照度むらセンサ94(及び照度モニタ)、空間像計測器96、並びに波面収差計測器98では、投影光学系PL及び水を介して照明光ILを受光することとなる。また、各センサは、例えば光学系などの一部だけが計測ステージMSTに搭載されていても良いし、センサ全体を計測ステージMSTに配置するようにしても良い。
【0055】
また、計測ステージMSTの−Y側の側面には、直方体状の基準部材としてのコンフィデンシャルバー(以下、「CDバー」と略述する)46がX軸方向に延設されている。このCDバー46は、フルキネマティックマウント構造によって、計測ステージMST上にキネマティックに支持されている。なお、CDバー46はフィデュシャルバー(「FDバー」と略述)とも呼ばれる。
【0056】
CDバー46は、原器(計測基準)となるため、低熱膨張率の光学ガラスセラミックス、例えば、ショット社のゼロデュア(商品名)などがその素材として採用されている。このCDバー46の上面(表面)は、いわゆる基準平面板と同程度にその平坦度が高く設定されている。また、このCDバー46の長手方向の一側と他側の端部近傍には、図2に示されるように、Y軸方向を周期方向とする基準格子(例えば回折格子)52がそれぞれ形成されている。この一対の基準格子52は、所定距離を隔ててCDバー46のX軸方向の中心、すなわちセンターラインCLに関して対称な配置で形成されている。
【0057】
また、このCDバー46の上面には、図2に示されるように複数の基準マークMが形成されている。この複数の基準マークMは、同一ピッチでY軸方向に関して3行の配列で形成され、各行の配列がX軸方向に関して互いに所定距離だけずれて形成されている。各基準マークMとしては、後述するプライマリアライメント系、セカンダリアライメント系によって検出可能な寸法の2次元マークが用いられている。基準マークMはその形状(構成)が前述の基準マークFMと異なっても良いが、本実施形態では基準マークMと基準マークFMとは同一の構成であり、かつウエハWのアライメントマークとも同一の構成となっている。なお、本実施形態ではCDバー46の表面、及び計測ステージMST(前述の計測用部材を含んでも良い)の表面もそれぞれ撥液膜(撥水膜)で覆われている。
【0058】
計測ステージMSTの+Y端面、−X端面も前述したウエハステージWSTと同様の反射面19a、19bが形成されている(図2参照)。干渉計システム118(図5参照)のY軸干渉計18、X軸干渉計130(図1では、X軸干渉計130は不図示、図2参照)は、これらの反射面19a、19bに、図2に示されるように、干渉計ビーム(測長ビーム)を投射して、それぞれの反射光を受光することにより、各反射面の基準位置からの変位、すなわち計測ステージMSTの位置情報(例えば、少なくともX軸及びY軸方向の位置情報とθz方向の回転情報とを含む)を計測し、この計測値が主制御装置20に供給される。
【0059】
本実施形態の露光装置100では、図1、図2では図面の錯綜を避ける観点から図示が省略されているが、実際には、図3に示されるように、投影ユニットPUの中心を通りかつY軸と平行な直線LV上で、該中心から−Y側に所定距離隔てた位置に検出中心を有するプライマリアライメント系AL1が支持部材54に支持された状態で設けられている。また、プライマリアライメント系AL1を挟んで、X軸方向の一側と他側には、直線LVに関してほぼ対称に検出中心が配置されるセカンダリアライメント系AL21,AL22と、AL23,AL24とがそれぞれ設けられている。各セカンダリアライメント系AL2n(n=1〜4)は、回転中心Oを中心として紙面内で回動可能とされており、この回動により、X位置が調整される。なお、5つのアライメント系AL1、AL21〜AL24は、投影ユニットPUを保持するメインフレームの下面に固定される。ただし、これに限らず、5つのアライメント系AL1、AL21〜AL24を、例えば前述した計測フレームに設けても良い。
【0060】
本実施形態では、プライマリアライメント系AL1及び4つのセカンダリアライメント系AL21〜AL24のそれぞれとして、例えばウエハ上のレジストを感光させないブロードバンドな検出光束を対象マークに照射し、その対象マークからの反射光により受光面に結像された対象マークの像と不図示の指標(各アライメント系内に設けられた指標板上の指標パターン)の像とを撮像素子(CCD等)を用いて撮像し、それらの撮像信号を出力する画像処理方式のFIA(Field Image Alignment)系が用いられている。プライマリアライメント系AL1及び4つのセカンダリアライメント系AL21〜AL24のそれぞれからの撮像信号は、図5の主制御装置20に供給されるようになっている。
【0061】
次に、本実施形態の露光装置100におけるエンコーダシステム200について、図3に基づいて説明する。なお、図3においては、計測ステージMSTの図示が省略されるとともに、その計測ステージMSTと先端レンズ191との間に保持される水Lqで形成される液浸領域が符号14で示されている。
【0062】
この図3に示されるように、本実施形態の露光装置100では、前述したノズルユニット32の周囲を四方から囲む状態で、エンコーダシステムの4つのヘッドユニット62A〜62Dが配置されている。これらのヘッドユニット62A〜62Dは、図3等では図面の錯綜を避ける観点から図示が省略されているが、実際には、支持部材を介して、前述した投影ユニットPUを保持するメインフレームに吊り下げ状態で固定されている。なお、ヘッドユニット62A〜62Dは、例えば投影ユニットPUが吊り下げ支持される場合は投影ユニットPUと一体に吊り下げ支持しても良いし、あるいは前述した計測フレームに設けても良い。
【0063】
ヘッドユニット62A、62Cは、投影ユニットPUの+X側、−X側にそれぞれX軸方向を長手方向として、かつ投影光学系PLの光軸AXに関して対称に光軸AXからほぼ同一距離隔てて配置されている。また、ヘッドユニット62B、62Dは、投影ユニットPUの+Y側、−Y側にそれぞれY軸方向を長手方向として、かつ投影光学系PLの光軸AXからほぼ同一距離隔てて配置されている。
【0064】
ヘッドユニット62A及び62Cは、図3に示されるように、X軸方向に沿って投影光学系PLの光軸AXを通りかつX軸と平行な直線LH上に所定間隔で配置された複数(ここでは6個)のYヘッド64を備えている。ヘッドユニット62Aは、前述のYスケール39Y1を用いて、ウエハステージWSTのY軸方向の位置(Y位置)を計測する多眼(ここでは、6眼)のYリニアエンコーダ(以下、適宜「Yエンコーダ」又は「エンコーダ」と略述する)70A(図5参照)を構成する。同様に、ヘッドユニット62Cは、前述のYスケール39Y2を用いて、ウエハステージWSTのY位置を計測する多眼(ここでは、6眼)のYエンコーダ70C(図5参照)を構成する。ここで、ヘッドユニット62A,62Cが備える隣接するYヘッド64(すなわち、計測ビーム)の間隔は、前述のYスケール39Y1,39Y2のX軸方向の幅(より正確には、格子線の長さ)よりも狭く設定されている。また、ヘッドユニット62A,62Cがそれぞれ備える複数のYヘッド64のうち、最も内側に位置するYヘッド64は、投影光学系PLの光軸になるべく近く配置するために、投影光学系PLの鏡筒40の下端部(より正確には先端レンズ191を取り囲むノズルユニット32の横側)に固定されている。
【0065】
ヘッドユニット62A,62Cは、それぞれが備えるYヘッド64と同じX位置に、ただしY位置を+Y側に所定距離ずらして、それぞれ6個のZセンサ761〜766、741〜746(図3では不図示、図5参照)を備えている。
【0066】
Zセンサ741〜746、及びZセンサ761〜766は、図5に示されるように、不図示の処理装置を介して主制御装置20に接続されている。この処理装置を介してZセンサ72a〜72d(これらの配置については後述)も主制御装置20に接続されている。
【0067】
各Zセンサとしては、ウエハステージWSTに対し上方から光を照射し、その反射光を受光してその光の照射点におけるウエハステージWSTの上面(本実施形態では計測対象であるYスケールの計測面(計測対称面))のXY平面に直交するZ軸方向の位置情報を計測するセンサ、一例としてCDドライブ装置などで用いられる光ピックアップのような構成の光学式の変位センサ(光ピックアップ方式のセンサ)が用いられている。
【0068】
主制御装置20は、処理装置を介してZセンサ72a〜72d、Zセンサ741〜746、及びZセンサ761〜766の中から任意のZセンサを選択して作動状態とし、その作動状態としたZセンサで検出した面位置情報を受け取る。
【0069】
これを更に詳述すると、各Zセンサは、フォーカスセンサ、該フォーカスセンサを収納したセンサ本体及びセンサ本体をZ軸方向に駆動する駆動部、並びにセンサ本体のZ軸方向の変位を計測する計測部等(いずれも不図示)を備えている。
【0070】
フォーカスセンサとしては、計測ビームを計測対象面に照射し、その反射光を受光することで、計測対象面の変位を光学的に読み取る光ピックアップと同様の光学式変位センサが用いられている。フォーカスセンサの出力信号(フォーカスエラーとも呼ばれる)は、駆動部に送られる。駆動部は、フォーカスセンサからの出力信号に従って、センサ本体と計測対象面との距離を一定に保つように(より正確には、計測対象面をフォーカスセンサの光学系のベストフォーカス位置に保つように)、センサ本体をZ軸方向に駆動する。これにより、センサ本体は計測対象面のZ軸方向の変位に追従し、フォーカスロック状態が保たれる。
【0071】
計測部としては、本実施形態では、一例として回折干渉方式のエンコーダが用いられている。計測部は、センサ本体のZ軸方向の変位を読み取る。
【0072】
本実施形態では、上述のように、フォーカスロック状態では、センサ本体は、計測対象面との距離を一定に保つように、Z軸方向に変位する。従って、計測部のエンコーダヘッドが、センサ本体のZ軸方向の変位を計測することにより、計測対象面の面位置(Z位置)が計測される。計測部のエンコーダヘッドの計測値が、Zセンサの計測値として前述の処理装置を介して主制御装置20に供給される。
【0073】
ヘッドユニット62Bは、図3に示されるように、上記直線LV上にY軸方向に沿って所定間隔で配置された複数、ここでは7個のXヘッド66を備えている。また、ヘッドユニット62Dは、上記直線LV上に所定間隔で配置された複数、ここでは11個(ただし、図3ではプライマリアライメント系AL1と重なる11個のうちの3個は不図示)のXヘッド66を備えている。ヘッドユニット62Bは、前述のXスケール39X1を用いて、ウエハステージWSTのX軸方向の位置(X位置)を計測する、多眼(ここでは、7眼)のXリニアエンコーダ(以下、適宜「Xエンコーダ」又は「エンコーダ」と略述する)70B(図5参照)を構成する。また、ヘッドユニット62Dは、前述のXスケール39X2を用いて、ウエハステージWSTのX位置を計測する多眼(ここでは、11眼)のXエンコーダ70D(図5参照)を構成する。また、本実施形態では、例えば後述するアライメント時などにヘッドユニット62Dが備える11個のXヘッド66のうちの2個のXヘッド66が、Xスケール39X1,Xスケール39X2に同時にそれぞれ対向する場合がある。この場合には、Xスケール39X1と対向するXヘッド66、及びXスケール39X2と対向するXヘッド66のいずれを用いても良い。いずれにしても、ヘッドユニット62DのXスケールに対向するXヘッド66によってXリニアエンコーダ70Dが構成される。
【0074】
ここで、11個のXヘッド66のうちの一部、ここでは3個のXヘッドは、プライマリアライメント系AL1を支持する支持部材54の下方に取り付けられている。また、ヘッドユニット62B,62Dがそれぞれ備える隣接するXヘッド66(計測ビーム)の間隔は、前述のXスケール39X1,39X2のY軸方向の幅(より正確には、格子線の長さ)よりも狭く設定されている。また、ヘッドユニット62B,62Dがそれぞれ備える複数のXヘッド66のうち、最も内側に位置するXヘッド66は、投影光学系PLの光軸になるべく近く配置するために、投影光学系PLの鏡筒の下端部(より正確には先端レンズ191を取り囲むノズルユニット32の横側)に固定されている。
【0075】
さらに、セカンダリアライメント系AL21の−X側、セカンダリアライメント系AL24の+X側に、プライマリアライメント系AL1の検出中心を通るX軸に平行な直線上かつその検出中心に対してほぼ対称に検出点が配置されるYヘッド64y1,64y2がそれぞれ設けられている。Yヘッド64y1,64y2の間隔は、前述したCDバー46上の一対の基準格子52間の間隔にほぼ等しく設定されている。Yヘッド64y1,64y2は、ウエハステージWST上のウエハWの中心が上記直線LV上にある図3に示される状態では、Yスケール39Y2,39Y1にそれぞれ対向するようになっている。後述するアライメント動作の際などでは、Yヘッド64y1,64y2に対向してYスケール39Y2,39Y1がそれぞれ配置され、このYヘッド64y1,64y2(すなわち、これらYヘッド64y1,64y2によって構成されるYエンコーダ70E、70F(図5参照))によってウエハステージWSTのY位置(及びθz回転)が計測される。
【0076】
また、本実施形態では、セカンダリアライメント系の後述するベースライン計測時などに、Yヘッド64y1,64y2が、CDバー46の一対の基準格子52とそれぞれ対向し、その一対の基準格子52と対向するYヘッド64y1,64y2によって、CDバー46のY位置が、それぞれの基準格子52の位置で計測される。以下では、基準格子52にそれぞれ対向するYヘッド64y1,64y2によって構成されるエンコーダをYリニアエンコーダ70E2,70F2と呼ぶ。また、識別のため、Yスケール39Y2,39Y1に対向するYヘッド64y1,64y2によって構成されるYエンコーダを、Yエンコーダ70E1、70F1と呼ぶ。
【0077】
上述したリニアエンコーダ70A〜70Fの計測値は、主制御装置20に供給され、主制御装置20は、リニアエンコーダ70A〜70Dの計測値に基づいて、ウエハステージWSTのXY平面内の位置を制御するとともに、リニアエンコーダ70E,70Fの計測値に基づいて、CDバー46のθz方向の回転を制御する。
【0078】
また、本実施形態の露光装置100(ステージ装置50)には、図3に示されるように、スケール39X1,39X2、39Y1,39Y2、及びCDバー46上の一対の基準格子52の表面状態(例えば、異物などの存在状態)を検出するための6つの検出装置PDX1〜PDX4、PDY1,PDY2が設けられている(図3では、ハッチングが付されている)。検出装置PDX1〜PDX4、PDY1,PDY2は、投影ユニットPUを保持するメインフレーム(前述の鏡筒定盤を含む)に吊り下げ支持されても良いし、メインフレームとは別のフレーム部材に固定しても良い。
【0079】
これら6つの検出装置のうち、検出装置PDX1は投影ユニットPUの+Y側かつ−X側の位置に設けられており、検出装置PDX2は投影ユニットPUの+Y側かつ+X側の位置で、直線LVを基準として検出装置PDX1と左右対称な位置に設けられている。また、検出装置PDX3は投影ユニットPUの−Y側かつ−X側の位置に設けられており、検出装置PDX4は、直線LVを基準として検出装置PDX3と左右対称な位置に設けられている。更に、検出装置PDY1は、ヘッドユニット62Cの−Y側かつ照射系90a(これについては後述する)の+Y側に配置され、検出装置PDY2は、ヘッドユニット62Aの−Y側かつ受光系90a(これについては後述する)の+Y側の位置で、直線LVを基準として検出装置PDY1と左右対称な位置に配置されている。
【0080】
検出装置PDY1は、図4(A)に示されるように、スケール39Y2の表面に対して検出ビームを照射する照射系69Aと、スケール39Y2の表面にて散乱した検出ビームを受光する受光系69Bとを含んでいる。
【0081】
照射系69Aは、例えば、レーザ光源、コリメータレンズ、照射光調整部材、アナモルフィックプリズム、絞り等を含む送光部61と、ミラー63とを含んでいる。レーザ光源は波長が、例えば約780nmの検出ビームを射出する半導体レーザである。
【0082】
送光部61から射出された検出ビームは、ミラー63で反射され、スケール39Y2の表面に90°に近い入射角(図4では、89°)で入射する。すなわち、検出ビームはスケール39Y2の表面にほぼ平行に入射するので、図4(B)に示されるように、検出ビームは、スケール39Y2表面のX軸方向のほぼ全域にわたって延びる帯状の照射領域BAに照射される。そして、スケール39Y2の表面に、図4(A)に示されるように、異物(パーティクル)11が存在する場合、この異物11に照射された検出ビームが散乱する。
【0083】
受光系69Bは、図4(A)に示されるように、受光レンズ65及びイメージセンサ67を含んでいる。イメージセンサ67としては、例えば、一次元CCD(Charge Coupled Device)等の光電検出器が用いられる。
【0084】
受光系69Bでは、スケール39Y2表面の異物11において散乱した散乱光のうち、受光レンズ65に入射する散乱光をイメージセンサ67にて受光する。この場合、異物11のX位置に応じて、イメージセンサ67上における散乱光の受光位置が変化する。このイメージセンサ67の受光結果は、主制御装置20(図5参照)に送られる。主制御装置20は、この受光結果に基づいて異物11の位置を特定する。
【0085】
なお、検出装置PDY2も上記検出装置PDY1と同様の構成となっている。また、検出装置PDX1〜PDX4は、検出ビームの照射方向が検出装置PDY1,PDY2とは異なるものの、検出装置PDY1,PDY2と同様になっている。したがって、検出装置PDX1〜PDX4を用いることにより、スケール(39X1又は39X2)上に存在する異物11の位置を検出することが可能である。本実施形態では、異物検出時に前述のエンコーダシステムで計測されるウエハステージWSTの位置情報を用いるが、干渉計システム118で計測されるウエハステージWSTの位置情報を代用あるいは併用しても良い。
【0086】
なお、本実施形態では、検出装置からの検出ビームが、スケール39X1,39X2、39Y1,39Y2、及びCDバー46の基準格子52に照射されるため、スケール39X1,39X2、39Y1,39Y2及びCDバー46の基準格子52の回折格子における回折光が受光系69Bにて受光されるおそれがある。しかしながら、本実施形態では、回折格子の格子ピッチや向きが一定であり、受光系69Bでは、常に同一の状態の回折光が受光されるので、回折光の受光によって異物11からの散乱光の検出が影響を受けることが殆ど無い。すなわち、回折格子からの回折光の光量分だけ、受光光の光量(光強度)が底上げされるが、この底上げ分(ノイズ成分)は、位置に依存しないのに対し、異物11からの散乱光は、位置によって異なるからである。しかしながら、異物の検出信号のS/N比を向上させる観点からは、イメージセンサ67が回折光を受光しないように、受光系69Bの配置等を設計することが好ましい。
【0087】
さらに、本実施形態の露光装置100では、図3に示されるように、照射系90a及び受光系90bから成る、例えば特開平6−283403号公報(対応する米国特許第5,448,332号明細書)等に開示されるものと同様の構成の斜入射方式の多点焦点位置検出系(以下、「多点AF系」と略述する)が設けられている。本実施形態では、一例として、前述のヘッドユニット62Cの−X端部の−Y側に照射系90aが配置され、これに対峙する状態で、前述のヘッドユニット62Aの+X端部の−Y側に受光系90bが配置されている。
【0088】
多点AF系(90a,90b)の複数の検出点は、被検面上でX軸方向に沿って所定間隔で配置される。本実施形態では、例えば1行M列(Mは検出点の総数)又は2行N列(Nは検出点の総数の1/2)のマトリックス状に配置される。図3中では、それぞれ検出ビームが照射される複数の検出点を、個別に図示せず、照射系90a及び受光系90bの間でX軸方向に延びる細長い検出領域AFとして示している。この検出領域AFは、X軸方向の長さがウエハWの直径と同程度に設定されているので、ウエハWをY軸方向に1回スキャンするだけで、ウエハWのほぼ全面でZ軸方向の位置情報(面位置情報)を計測できる。また、この検出領域AFは、Y軸方向に関して、前述の液浸領域14(露光領域IA)とアライメント系(AL1、AL21,AL22,AL23,AL24)の検出領域との間に配置されているので、多点AF系とアライメント系とでその検出動作を並行して行うことが可能となっている。多点AF系は、投影ユニットPUを保持するメインフレームなどに設けても良いが、本実施形態では前述の計測フレームに設けるものとする。
【0089】
なお、複数の検出点は1行M列又は2行N列で配置されるものとしたが、行数及び/又は列数はこれに限られない。但し、行数が2以上である場合は、異なる行の間でも検出点のX軸方向の位置を異ならせることが好ましい。さらに、複数の検出点はX軸方向に沿って配置されるものとしたが、これに限らず、複数の検出点の全部又は一部をY軸方向に関して異なる位置に配置しても良い。例えば、X軸及びY軸の両方と交差する方向に沿って複数の検出点を配置しても良い。すなわち、複数の検出点は少なくともX軸方向に関して位置が異なっていれば良い。また、本実施形態では複数の検出点に検出ビームを照射するものとしたが、例えば検出領域AFの全域に検出ビームを照射しても良い。さらに、検出領域AFはX軸方向の長さがウエハWの直径と同程度でなくても良い。
【0090】
なお、図3では図示が省略されているが、多点AF系の複数の検出点のうち両端に位置する検出点の近傍、すなわち検出領域AFの両端部近傍に、前述の直線LVに関して対称な配置で、前述した各一対のZセンサ72a,72b、及び72c,72d(図5参照)が設けられている。これらの面位置センサとしては、ウエハステージWSTに対し上方から光を照射し、その反射光を受光してその光の照射点におけるウエハステージWST表面のXY平面に直交するZ軸方向の位置情報を計測するセンサ、一例としてCDドライブ装置などで用いられる光ピックアップのような構成の光学式の変位センサ(光ピックアップ方式のセンサ)が用いられている。
【0091】
図3において、符号UPはウエハステージWST上のウエハのアンロードが行われるアンローディングポジションを示し、符号LPはウエハステージWST上へのウエハのロードが行われるローディングポジションを示す。本実施形態では、アンロードポジションUPとローディングポジションLPとは、直線LVに関して対称に設定されている。なお、ウエハWの交換位置をアンロードポジションUPとローディングポジションLPとに分けて設定しているが、アンロードポジションUPとローディングポジションLPとを同一位置としても良い。
【0092】
図5には、露光装置100の制御系の主要な構成が示されている。この制御系は、装置全体を統括的に制御するマイクロコンピュータ(又はワークステーション)から成る主制御装置20を中心として構成されている。なお、図5においては、前述した照度むらセンサ94、空間像計測器96及び波面収差計測器98などの計測ステージMSTに設けられた各種センサが、纏めてセンサ群99として示されている。
【0093】
上述のようにして構成された本実施形態の露光装置100では、前述したようなウエハステージWST上のXスケール、Yスケールの配置及び前述したようなXヘッド、Yヘッドの配置を採用したことから、図6(A)及び図6(B)などに例示されるように、ウエハステージWSTの有効ストローク範囲(すなわち、本実施形態では、アライメント及び露光動作のために移動する範囲)では、必ず、Xスケール39X1,39X2とヘッドユニット62B、62D(Xヘッド66)とがそれぞれ対向し、かつYスケール39Y1,39Y2とヘッドユニット62A,62C(Yヘッド64)又はYヘッド64y1、64y2とがそれぞれ対向するようになっている。なお、図6(A)及び図6(B)中では、対応するXスケール又はYスケールに対向したヘッドが丸で囲んで示されている。
【0094】
このため、主制御装置20は、前述のウエハステージWSTの有効ストローク範囲では、エンコーダ70A〜70Dの少なくとも3つ、又はリニアエンコーダ70E1,70F1,70B及び70Dのうちの少なくとも3つの計測値に基づいて、ステージ駆動系124を構成する各モータを制御することで、ウエハステージWSTのXY平面内の位置情報(θz方向の回転情報を含む)を、高精度に制御することができる。エンコーダ70A〜70Fの計測値が受ける空気揺らぎの影響は、干渉計に比べては無視できるほど小さいので、空気揺らぎに起因する計測値の短期安定性は、干渉計に比べて格段に良い。なお、本実施形態では、ウエハステージWSTの有効ストローク範囲及びスケールのサイズ(すなわち、回折格子の形成範囲)などに応じて、ヘッドユニット62B、62D、62A、62Cのサイズ(例えば、ヘッドの数及び/又は間隔など)を設定している。従って、ウエハステージWSTの有効ストローク範囲では、4つのスケール39X1,39X2、39Y1,39Y2が全てヘッドユニット62B、62D、62A、62Cとそれぞれ対向するが、4つのスケールが全て対応するヘッドユニットと対向しなくても良い。例えば、Xスケール39X1,39X2の一方、及び/又はYスケール39Y1,39Y2の一方がヘッドユニットから外れても良い。Xスケール39X1,39X2の一方、又はYスケール39Y1,39Y2の一方がヘッドユニットから外れる場合、ウエハステージWSTの有効ストローク範囲では3つのスケールがヘッドユニットと対向するので、ウエハステージWSTのX軸、Y軸及びθz方向の位置情報を常時計測可能である。また、Xスケール39X1,39X2の一方、及びYスケール39Y1,39Y2の一方がヘッドユニットから外れる場合、ウエハステージWSTの有効ストローク範囲では2つのスケールがヘッドユニットと対向するので、ウエハステージWSTのθz方向の位置情報は常時計測できないが、X軸及びY軸方向の位置情報は常時計測可能である。この場合、干渉計システム118によって計測されるウエハステージWSTのθz方向の位置情報を併用して、ウエハステージWSTの位置制御を行っても良い。
【0095】
また、図6(A)中に白抜き矢印で示されるようにウエハステージWSTをX軸方向に駆動する際、そのウエハステージWSTのY軸方向の位置を計測するYヘッド64が、同図中に矢印e1,e2で示されるように、隣のYヘッド64に順次切り換わる。例えば、実線の丸で囲まれるYヘッド64から点線の丸で囲まれるYヘッド64へ切り換わる。このため、その切り換わりの前後で、計測値が引き継がれる。すなわち、本実施形態では、このYヘッド64の切り換え及び計測値の引継ぎを円滑に行うために、前述の如く、ヘッドユニット62A,62Cが備える隣接するYヘッド64の間隔を、Yスケール39Y1,39Y2のX軸方向の幅よりも狭く設定したものである。
【0096】
また、図示は省略されているが、上記のYヘッドと同様に、ヘッドユニット62A,62Cがそれぞれ備える、隣接するZセンサ76同士、74同士の切り換え(つなぎ処理)が行われる。
【0097】
また、本実施形態では、前述の如く、ヘッドユニット62B,62Dが備える隣接するXヘッド66の間隔は、前述のXスケール39X1,39X2のY軸方向の幅よりも狭く設定されているので、上述と同様に、図6(B)中に白抜き矢印で示されるようにウエハステージWSTをY軸方向に駆動する際、そのウエハステージWSTのX軸方向の位置を計測するXヘッド66が、順次隣のXヘッド66に切り換わり(例えば実線の丸で囲まれるXヘッド66から点線の丸で囲まれるXヘッド66へ切り換わる)、その切り換わりの前後で計測値が引き継がれる。
【0098】
ここで、エンコーダ70A〜70Fの構成等について、図7(A)に拡大して示されるYエンコーダ70Aを代表的に採り上げて説明する。この図7(A)では、Yスケール39Y1に検出光(計測ビーム)を照射するヘッドユニット62Aの1つのYヘッド64を示している。
【0099】
Yヘッド64は、大別すると、照射系64a、光学系64b、及び受光系64cの3部分から構成されている。
【0100】
照射系64aは、レーザ光LBをY軸及びZ軸に対して45°を成す方向に射出する光源、例えば半導体レーザLDと、該半導体レーザLDから射出されるレーザビームLBの光路上に配置されたレンズL1とを含む。
【0101】
光学系64bは、その分離面がXZ平面と平行である偏光ビームスプリッタPBS、一対の反射ミラーR1a,R1b、レンズL2a,L2b、四分の一波長板(以下、λ/4板と記述する)WP1a,WP1b、及び反射ミラーR2a,R2b等を備えている。
【0102】
前記受光系64cは、偏光子(検光子)及び光検出器等を含む。
【0103】
このYエンコーダ70Aにおいて、半導体レーザLDから射出されたレーザビームLBはレンズL1を介して偏光ビームスプリッタPBSに入射し、偏光分離されて2つのビームLB1、LB2となる。偏光ビームスプリッタPBSを透過したビームLB1は反射ミラーR1aを介してYスケール39Y1に形成された反射型回折格子RGに到達し、偏光ビームスプリッタPBSで反射されたビームLB2は反射ミラーR1bを介して反射型回折格子RGに到達する。なお、ここで「偏光分離」とは、入射ビームをP偏光成分とS偏光成分に分離することを意味する。
【0104】
ビームLB1、LB2の照射によって回折格子RGから発生する所定次数の回折ビーム、例えば1次回折ビームはそれぞれ、レンズL2b、L2aを介してλ/4板WP1b、WP1aにより円偏光に変換された後、反射ミラーR2b、R2aにより反射されて再度λ/4板WP1b、WP1aを通り、往路と同じ光路を逆方向に辿って偏光ビームスプリッタPBSに達する。
【0105】
偏光ビームスプリッタPBSに達した2つのビームは、各々その偏光方向が元の方向に対して90度回転している。このため、先に偏光ビームスプリッタPBSを透過したビームLB1の1次回折ビームは、偏光ビームスプリッタPBSで反射されて受光系64cに入射するとともに、先に偏光ビームスプリッタPBSで反射されたビームLB2の1次回折ビームは、偏光ビームスプリッタPBSを透過してビームLB1の1次回折ビームと同軸に合成されて受光系64cに入射する。
【0106】
そして、上記2つの1次回折ビームは、受光系64cの内部で、検光子によって偏光方向が揃えられ、相互に干渉して干渉光となり、この干渉光が光検出器によって検出され、干渉光の強度に応じた電気信号に変換される。
【0107】
上記の説明からわかるように、Yエンコーダ70Aでは、干渉させる2つのビームの光路長が極短くかつほぼ等しいため、空気揺らぎの影響がほとんど無視できる。そして、Yスケール39Y1(すなわちウエハステージWST)が計測方向(この場合、Y軸方向)に移動すると、2つのビームそれぞれの位相が変化して干渉光の強度が変化する。この干渉光の強度の変化が、受光系64cによって検出され、その強度変化に応じた位置情報がYエンコーダ70Aの計測値として出力される。その他のエンコーダ70B,70C,70D等も、エンコーダ70Aと同様にして構成されている。各エンコーダとしては、分解能が、例えば0.1nm程度のものが用いられている。なお、本実施形態のエンコーダでは、図7(B)に示されるように、検出光として格子線から成る回折格子RGの周期方向に長く延びる断面形状のレーザビームLBを用いても良い。図7(B)では、回折格子RGの格子線と比較してビームLBを誇張して大きく図示している。
【0108】
次に、本実施形態の露光装置100における、ウエハステージWSTと計測ステージMSTとを用いた並行処理動作について、図8〜図21に基づいて説明する。なお、以下の動作中、主制御装置20によって、局所液浸装置8の液体供給装置5及び液体回収装置6の各バルブの開閉制御が前述したようにして行われ、投影光学系PLの先端レンズ191の射出面側には常時水が満たされている。しかし、以下では、説明を分かり易くするため、液体供給装置5及び液体回収装置6の制御に関する説明は省略する。また、以後の動作説明は、多数の図面を用いて行うが、図面毎に同一の部材に符号が付されていたり、付されていなかったりしている。すなわち、図面毎に、記載している符号が異なっているが、それら図面は符号の有無に関わらず、同一構成である。これまでに説明に用いた、各図面についても同様である。
【0109】
なお、前提として、プライマリアライメント系AL1のベースライン計測(ベースラインチェック)や、セカンダリアライメント系AL2n(n=1〜4)のベースライン計測動作は、既に行われているものとする。ここで、プライマリアライメント系AL1のベースラインとは、投影光学系PLによるパターン(例えばレチクルRのパターン)の投影位置とプライマリアライメント系AL1の検出中心との位置関係(又は距離)を意味し、セカンダリアライメント系AL2nのベースラインとは、プライマリアライメント系AL1(の検出中心)を基準とする各セカンダリアライメント系AL2n(の検出中心)の相対位置を意味する。プライマリアライメント系AL1のベースラインは、例えば、基準マークFMがプライマリアライメント系AL1の視野(検出領域)内に位置決めされた状態で、基準マークFMを計測するとともに、基準マークFMが投影光学系PLの露光領域IA(液浸領域14)内に位置決めされた状態で、例えば、特開2002−14005号公報(対応する米国特許出願公開第2002/0041377号明細書)などに開示される方法と同様に、一対の空間像計測スリットパターンSLを用いたスリットスキャン方式の空間像計測動作にて、一対の計測マークの空間像をそれぞれ計測し、それぞれの検出結果及び計測結果に基づいて算出する。また、セカンダリアライメント系AL2nのベースラインは、例えば、事前に、ロット先頭のウエハW(プロセスウエハ)上の特定のアライメントマークをプライマリアライメント系AL1、セカンダリアライメント系AL21〜AL24それぞれで検出し、その検出結果とその検出時のエンコーダ70A〜70Dの計測値とから算出する。なお、主制御装置20は、セカンダリアライメント系AL21〜AL24のX軸方向の位置を、アライメントショット領域の配置に合わせて事前に調整している。
【0110】
図8には、ウエハステージWST上のウエハW(ここでは、一例として、あるロット(1ロットは25枚又は50枚)の中間のウエハとする)に対するステップ・アンド・スキャン方式の露光が行われている状態が示されている。この露光中、主制御装置20により、Xスケール39X1,39X2にそれぞれ対向する図8中に丸で囲んで示されている2つのXヘッド66(Xエンコーダ70B,70D)と、Yスケール39Y1,39Y2にそれぞれ対向する図8中に丸で囲んで示されている2つのYヘッド64(Yエンコーダ70A,70C)とのうちの少なくとも3つの計測値に基づいて、ウエハステージWSTのXY平面内の位置(θz回転を含む)が制御されている。また、ウエハステージWSTのZ軸方向の位置とθy回転(ローリング)及びθx回転(ピッチング)とは、ヘッドユニット62A,62C内部に設けられた前述のZセンサ74i,76j(i,jは、1〜6のいずれか)の計測値に基づいて制御され、θx回転(ピッチング)はY軸干渉計16の計測値に基づいて制御されている。
【0111】
なお、Zセンサをヘッドユニット62A,62Cの内部又はその近傍にY軸方向にも並べて配置し、ウエハステージWSTのZ軸方向の位置とθy回転(ローリング)とθx回転(ピッチング)とを、複数のZセンサの計測値に基づいて制御しても良い。いずれにしても、この露光中のウエハステージWSTのZ軸方向の位置、θy回転及びθx回転の制御(ウエハWのフォーカス・レベリング制御)は、事前に行われたフォーカスマッピング(これについては後述する)の結果に基づいて行われる。
【0112】
上記の露光動作は、主制御装置20により、事前に行われたウエハアライメント、例えばエンハンスト・グローバル・アライメント(EGA)の結果(これについては後述する)及びアライメント系AL1,AL21〜AL24の最新のベースライン等に基づいて、ウエハW上の各ショット領域の露光のための走査開始位置(加速開始位置)へウエハステージWSTが移動されるショット間移動動作と、レチクルRに形成されたパターンを走査露光方式で各ショット領域に転写する走査露光動作とを繰り返すことにより、行われる。なお、上記の露光動作は、先端レンズ191とウエハWとの間に水を保持した状態で行われる。また、図8における−Y側に位置するショット領域から+Y側に位置するショット領域の順で行われる。さらにEGA方式は、例えば特開昭61−44429号公報(対応する米国特許第4,780,617号明細書)に開示されているように、ウエハW上の複数のショット領域の一部(例えば、8〜16個程度)をアライメントショット領域として選択し、この選択されたショット領域のアライメントマークをアライメント系AL1、AL21〜AL24によって検出する。そして、この検出されたアライメントマークの位置情報を統計演算してウエハW上の各ショット領域の位置情報(配列座標)を算出するものである。このEGA方式では、ショット領域の位置情報だけでなく、ウエハWのスケーリング、ローテーションなどに関する情報も求めることができる。
【0113】
そして、図9に示されるように、ウエハWに対する露光が終了する前(最終のショット領域が露光される前)に、主制御装置20は、X軸干渉計130の計測値を一定値に維持しつつY軸干渉計18の計測値に基づいてステージ駆動系124を制御して、計測ステージMSTを図10に示される位置まで移動させる。このとき、CDバー46の−Y側の端面とウエハステージWSTの+Y側の端面とは接触している。なお、例えば各ステージのY軸方向の位置を計測する干渉計又はエンコーダの計測値をモニタして計測ステージMSTとウエハステージWSTとをY軸方向に300μm程度離間させて、非接触の状態(近接状態)を保っても良い。
【0114】
次いで、図11に示されるように、主制御装置20は、ウエハステージWSTと計測ステージMSTとのY軸方向の位置関係を保ちつつ、計測ステージMSTを−Y方向に駆動する動作を開始するとともに、ウエハステージWSTをアンローディングポジションUPに向けて駆動する動作を開始する。この動作が開始されると、本実施形態では計測ステージMSTが−Y方向のみに移動され、ウエハステージWSTが−Y方向及び−X方向に移動される。
【0115】
このようにして、主制御装置20により、ウエハステージWST、計測ステージMSTが同時に駆動されると、投影ユニットPUの先端レンズ191とウエハWとの間に保持されていた水(液浸領域14の水)が、ウエハステージWST及び計測ステージMSTの−Y側への移動に伴って、ウエハW→プレート28→CDバー46→計測ステージMSTの順に移動する。なお、上記の移動中、ウエハステージWST、計測ステージMSTは前述の接触状態(又は近接状態)を保っている。なお、図11には、液浸領域14の水がプレート28からCDバー46に渡される直前の状態が示されている。
【0116】
図11の状態から、更にウエハステージWST及び計測ステージMSTが−Y方向へ同時に僅かに駆動されると、Yエンコーダ70A,70CによるウエハステージWSTの位置計測ができなくなるので、この直前に、主制御装置20は、ウエハステージWSTのY位置及びθz回転の制御を、Yエンコーダ70A,70Cの計測値に基づく制御から、Y軸干渉計16の計測値に基づく制御に切り換える。そして、所定時間後、図12に示されるように、計測ステージMSTのCDバー46がアライメント系AL1,AL21〜AL24の直下に位置するため、主制御装置20は、計測ステージMSTをこの位置で停止するとともに、Xスケール39X1に対向する図12中に丸で囲んで示されるXヘッド66(Xリニアエンコーダ70B)によりウエハステージWSTのX位置を計測しかつY位置及びθz回転等はY軸干渉計16により計測しつつ、ウエハステージWSTをさらにアンローディングポジションUPに向かって駆動し、アンローディングポジションUPで停止させる。なお、図12の状態では、計測ステージMSTと先端レンズ191との間に水が保持されている。
【0117】
次いで、主制御装置20は、図12及び図13に示されるように、CDバー46の基準マークMを用いて、セカンダリアライメント系AL2n(の検出中心)の、プライマリアライメント系AL1(の検出中心)を基準とする相対位置関係(ベースライン)を計測する。この場合のベースライン計測は、ウエハ交換毎というインターバルで行われるので、以下では「Sec-BCHK(インターバル)」とも記述する。
【0118】
このSec-BCHK(インターバル)では、主制御装置20は、CDバー46上の一対の基準格子52とそれぞれと対向するYヘッド64y1,64y2(Yリニアエンコーダ70E2,70F2)の計測値に基づいて、CDバー46のθz回転を調整するとともに、計測ステージMSTのセンターラインCL上又はその近傍に位置する基準マークMを検出するプライマリアライメント系AL1の計測値に基づいて、例えば干渉計の計測値を用いてCDバー46のXY位置を調整する。
【0119】
そして、この状態で、主制御装置20は、4つのセカンダリアライメント系AL21〜AL24を用いて、それぞれのセカンダリアライメント系の視野内にあるCDバー46上の基準マークMを同時に計測することで、4つのセカンダリアライメント系AL21〜AL24のベースラインをそれぞれ求める。そして、その後の処理に際しては、新たに計測したベースラインを用いることで、4つのセカンダリアライメント系AL21〜AL24のベースラインのドリフトが補正される。
【0120】
また、このSec-BCHK(インターバル)と並行して、主制御装置20は、アンロードポジションUPに停止しているウエハステージWST上のウエハWを、不図示のアンロードアームの駆動系に指令を与えてアンロードさせ、ウエハステージWSTを+X方向に駆動してローディングポジションLPに移動させる。
【0121】
次に、主制御装置20は、図14に示されるように、計測ステージMSTを、ウエハステージWSTから離れた状態からウエハステージWSTとの前述の接触状態(又は近接状態)に移行させるための最適な待機位置(以下、「最適スクラム待機位置」と呼ぶ)へ移動させる。これと並行して、主制御装置20は、不図示のロードアームの駆動系に指令を与えて、ウエハステージWST上に新たなウエハWをロードさせる。なお、図14には、ウエハWがウエハステージWST上にロードされた状態が示されている。
【0122】
本実施形態において、上述の計測ステージMSTの最適スクラム待機位置は、ウエハ上のアライメントショット領域に付設されたアライメントマークのY座標に応じて適切に設定される。これにより、上記の接触状態(又は近接状態)への移行の際に、計測ステージMSTをその最適スクラム待機位置に移動させる動作が不要になるので、最適スクラム待機位置から離れた位置に待機させる場合に比べて、計測ステージMSTの移動回数を1回削減できる。また、本実施形態では、上記の最適スクラム待機位置としては、ウエハステージWSTが前述のウエハアライメントのために停止する位置で、上記の接触状態(又は近接状態)に移行できるように、最適スクラム待機位置が定められる。
【0123】
次に、主制御装置20は、ウエハステージWSTを、図15に示される位置へ移動させる。この移動の途中で、主制御装置20は、ウエハステージWSTのXY平面内の位置の制御を、X軸方向についてはエンコーダ70Bの計測値,Y軸方向及びθz回転についてはY軸干渉計16の計測値に基づく制御から、Xスケール39X1,39X2に対向する図15中に丸で囲んで示される2つのXヘッド66のいずれか(エンコーダ70D)と、Yスケール39Y1,39Y2に対向する図15中に丸で囲んで示される2つのYヘッド64y2,64y1(エンコーダ70F1,70E1)との3つの計測値に基づく制御に切り換える。
【0124】
次に、主制御装置20は、上述の3つのエンコーダの計測値に基づいて、ウエハステージWSTの位置を管理しつつ、ウエハステージWSTの+Y方向への移動を開始する。そして、ウエハステージWSTが図16に示される位置に到達すると、主制御装置20は、ウエハステージWSTと計測ステージMSTとを接触させ(又は300μm程度の距離に近接する)、直ちにウエハステージWSTを停止する。
【0125】
ウエハステージWSTの停止後、主制御装置20は、プライマリアライメント系AL1,セカンダリアライメント系AL22,AL23を用いて、3つのショット領域(以下、「ファーストアライメントショット領域」と呼ぶ)に付設されたアライメントマークをほぼ同時にかつ個別に検出し(図16中の星マーク参照)、上記3つのアライメント系AL1,AL22,AL23の検出結果とその検出時の上記3つのエンコーダの計測値とを関連付けて不図示のメモリに格納する。なお、この場合の3つのファーストアライメントショット領域に付設されたアライメントマークの同時検出は、ウエハステージWSTのZ位置を変化させることで、複数のアライメント系AL1,AL21〜AL24とウエハステージWSTに載置されているウエハWとの間の、Z軸方向(フォーカス方向)における相対位置関係を変更しつつ行われている。
【0126】
上述のように本実施形態では、ファーストアライメントショット領域のアライメントマークの検出を行う位置で、計測ステージMSTとウエハステージWSTとの接触状態(又は近接状態)への移行が完了し、その位置から、主制御装置20によって、その接触状態(又は近接状態)での両ステージWST,MSTの+Y方向への移動が開始される。この両ステージWST,MSTの+Y方向への移動開始に先立って、主制御装置20は、図16に示されるように、多点AF系(90a,90b)の検出ビームのウエハステージWSTへの照射を開始する。これにより、ウエハステージWST上に多点AF系の検出領域が形成される。
【0127】
このとき、液浸領域14は、CDバー46とウエハステージWSTとの境界付近に形成されている。すなわち、液浸領域14の水がCDバー46からウエハステージWSTに渡される直前の状態となっている。
【0128】
そして、両ステージWST,MSTが接触状態(又は近接状態)を保ったまま+Y方向へ更に移動し、図17に示される位置に到達すると、主制御装置20は、図17中でアライメント系AL1,AL21〜AL24それぞれと対向する位置に存在する5つのショット領域(以下、「セカンドアライメントショット領域」)に付設されたアライメントマークを、5つのアライメント系AL1,AL21〜AL24を用いて、ほぼ同時にかつ個別に検出し(図17中の星マーク参照)、上記5つのアライメント系AL1,AL21〜AL24の検出結果とその検出時の上記3つのエンコーダの計測値とを関連付けて不図示のメモリに格納する。なお、この場合の5つのセカンドアライメントショット領域に付設されたアライメントマークの同時検出も、ファーストアライメントショット領域の検出と同様、ウエハステージWSTのZ位置を変化させながら行われる。
【0129】
また、このとき、Xスケール39X1に対向し、かつ上記直線LV上に位置するXヘッドが存在しないので、主制御装置20は、Xスケール39X2に対向するXヘッド66(Xリニアエンコーダ70D)及びYリニアエンコーダ70E1,70F1の計測値に基づいて、ウエハステージWSTのXY平面内の位置を制御している。
【0130】
上述したように、本実施形態では、セカンドアライメントショット領域のアライメントマークの検出が終了した時点で、合計8個のアライメントマークの位置情報(2次元位置情報)が検出できる。そこで、この段階で、主制御装置20は、これらの位置情報を用いて例えば前述のEGA方式にて統計演算を行って、ウエハWのスケーリング(ショット倍率)を求め、その算出したショット倍率に基づいて、投影光学系PLの光学特性、例えば投影倍率を調整しても良い。本実施形態では、投影光学系PLを構成する特定の可動レンズを駆動する、あるいは投影光学系PLを構成する特定レンズ間に形成された気密室内部の気体の圧力を変更するなどして、投影光学系PLの光学特性を調整する調整装置68(図5参照)を制御して投影光学系PLの光学特性を調整する。すなわち、主制御装置20は、アライメント系AL1,AL21〜AL24がウエハW上の所定数(ここでは8個)のマークを検出し終えた段階で、それらの検出結果に基づいて、投影光学系PLの光学特性を調整させるように調整装置68を制御することとしても良い。なお、マークの個数は8個、あるいは検出対象のマークの総数の半分などに限られるものでなく、例えばウエハのスケーリングなどの算出に必要な個数以上であれば良い。
【0131】
次いで、主制御装置20は、上記の5つのセカンドアライメントショット領域に付設されたアライメントマークの同時検出の終了後、接触状態(又は近接状態)での両ステージWST,MSTの+Y方向への移動を再び開始すると同時に、多点AF系(90a,90b)を用いたフォーカスマッピング(ウエハW表面のZ軸方向に関する位置情報(面位置情報)の検出)を開始する。
【0132】
このフォーカスマッピングに際して、主制御装置20は、Xスケール39X2に対向するXヘッド66(Xリニアエンコーダ70D)と、Yスケール39Y1,Y2にそれぞれ対向する2つのYヘッド64y2,64y1(Yリニアエンコーダ70F1,70E1)とに基づいてウエハステージWSTのXY平面内の位置を管理している。そして、主制御装置20は、多点AF系(90a,90b)と面位置センサを共に作動させた状態で、ウエハステージWSTが+Y方向へ進行している間に、所定のサンプリング間隔で、面位置センサで計測されるウエハステージWST表面(プレート28の表面)のZ軸方向に関する位置情報(面位置情報)と、多点AF系(90a,90b)で検出される複数の検出点におけるウエハW表面のZ軸方向に関する位置情報(面位置情報)とを取り込み、その取り込んだ2種類の面位置情報と各サンプリング時のYリニアエンコーダ70F1,70E1の計測値との三者を相互に対応付けて不図示のメモリに逐次格納する。
【0133】
上記の接触状態(又は近接状態)での両ステージWST,MSTの+Y方向への移動により、ウエハステージWSTが、図18に示される位置に達すると、主制御装置20は、ウエハステージWSTをその位置で停止させるとともに、計測ステージMSTについては、そのまま+Y方向への移動を続行させる。なお、計測ステージMSTは、ウエハステージWST側で露光が開始されるまで待機する露光開始待機位置に達した段階で、その位置にて計測ステージMSTを停止させる。そして、主制御装置20は、図18中でアライメント系AL1,AL21〜AL24と対向する位置に存在する5つのショット領域(以下、「サードアライメントショット領域」と呼ぶ)に付設されたアライメントマークを、5つのアライメント系AL1,AL21〜AL24を用いてほぼ同時にかつ個別に検出し(図18中の星マーク参照)、上記5つのアライメント系AL1,AL21〜AL24の検出結果とその検出時の上記3つのエンコーダ70D、70F1、70E1の計測値とを関連付けて不図示のメモリに格納する。なお、この場合の5つのサードアライメントショット領域に付設されたアライメントマークの同時検出も、前述した如く、ウエハステージWSTのZ位置を変化させながら行われる。
【0134】
次に、主制御装置20は、ウエハステージWSTの+Y方向への移動を開始する。そして、ウエハステージWSTが図19に示される位置に到達すると、主制御装置20は、直ちにウエハステージWSTを停止させ、図19の状態でプライマリアライメント系AL1,セカンダリアライメント系AL22,AL23それぞれと対向する3つのショット領域(以下、「フォースアライメントショット領域」と呼ぶ)に付設されたアライメントマークをほぼ同時にかつ個別に検出し(図19中の星マーク参照)、上記3つのアライメント系AL1,AL22,AL23の検出結果とその検出時の上記3つのエンコーダの計測値とを関連付けて不図示のメモリに格納する。なお、この場合の3つのフォースアライメントショット領域に付設されたアライメントマークの同時検出も、前述した如く、ウエハステージWSTのZ位置を変化させながら行われる。このとき、フォーカスマッピングは続行されている。一方、計測ステージMSTは、上記露光開始待機位置で待機したままである。そして、主制御装置20は、このようにして得た合計16個のアライメントマークの検出結果と対応する4つのエンコーダの計測値とを用いて、例えば前述のEGA方式にて統計演算を行って、上記4つのエンコーダの計測軸で規定されるXY座標系上におけるウエハW上の全てのショット領域の配列情報(座標値)を算出する。
【0135】
次いで、主制御装置20は、ウエハステージWSTを再度+Y方向へ移動させながら、フォーカスマッピングを続行する。そして、多点AF系(90a,90b)からの検出ビームがウエハW表面から外れると、図20に示されるように、フォーカスマッピングを終了する。この時点で、主制御装置20は、多点AF系(90a,90b)の各検出点についての面位置情報を、同時に取り込んだ面位置センサによる面位置情報を基準とするデータに換算する。その後、主制御装置20は、前述のウエハアライメント(EGA)の結果及び最新の5つのアライメント系AL1,AL21〜AL24のベースライン等に基づいて、ステップ・アンド・スキャン方式の露光を、液浸露光にて行い、ウエハW上の複数のショット領域にレチクルパターンを順次転写する。この状態が、図21に示されている。以降、ロット内の残りのウエハに対して同様の動作が繰り返し行われる。
【0136】
ここで、上記露光動作中においては、ウエハWのほぼ全面に対して露光を行うため、図21や図9などから分かるように、検出装置PDY1の照射系69Aからの検出ビームが、スケール39Y2のY軸方向全域に対して、少なくとも1度は照射されるようになっている。したがって、主制御装置20は、検出装置PDY1を構成するイメージセンサ67において、散乱光が受光された場合には、スケール39Y2上に異物が存在するものと判断し、その検出時点のエンコーダ70Cの計測結果により、異物のY軸方向位置(座標)を検出する。また、主制御装置20は、イメージセンサ67による検出結果及びエンコーダ70B又は70Dの計測結果に基づいて、異物のスケール39Y2上における位置(座標)を検出する。
【0137】
また、検出装置PDY2の検出ビームに関しても、検出装置PDY1と同様、露光動作中に、スケール39Y1のY軸方向全域に対して、少なくとも1度は照射されるので、主制御装置20は、検出装置PDY2を構成するイメージセンサ67において、散乱光が受光された場合には、スケール39Y1上に異物が存在するものと判断し、その検出時点のエンコーダ70Aの計測結果により、異物の位置(座標)を検出する。また、主制御装置20は、検出装置PDY2の検出結果とエンコーダ70B又は70Dの計測結果に基づいて、異物が存在するか否かの判断、及び異物のスケール39Y1上における位置(座標)の検出を実行する。
【0138】
また、上記露光動作中には、図21に代表的に示されるように、検出装置PDX1又はPDX2と、スケール39X1とが対向するようになっており、また、露光動作中、スケール39X1の表面全域に対して少なくとも一度は、検出装置PDX1又はPDX2の検出ビームが照射されるようになっている。したがって、主制御装置20は、エンコーダ70B、及び70A又は70C、並びに検出装置PDX1,PDX2を用いて、上述と同様にして異物が存在するか否かの判断、及び異物のスケール39X1上における位置(座標)の検出を実行する。
【0139】
更に、図12〜図14に示されるように、ウエハステージWSTがアンローディングポジションUPからローディングポジションLPに移動する間には、検出装置PDX3又はPDX4とスケール39X2とが対向し、スケール39X2の表面全域に対して少なくとも一度は、検出装置PDX3の検出ビーム及び検出装置PDX4の検出ビームのいずれかが照射されるため、主制御装置20は、これら検出装置PDX3又はPDX4、及びエンコーダ70D、並びにY軸干渉計16を用いて、異物が存在するか否かの判断、及び異物のスケール39X2上における位置(座標)の検出を実行する。
【0140】
また、図9や図18に示されるように、計測ステージMST上に液浸領域14が存在せず、計測ステージMSTが自由に移動できる場合には、主制御装置20が、CDバー46上の基準格子52が検出装置PDX1又はPDX2に対向する位置まで計測ステージMSTを移動し、検出装置PDX1又はPDX2を用いて、基準格子52上に異物が存在するか否かの判断、及び異物の基準格子52上における位置(座標)の検出を実行する。
【0141】
なお、上述した場合に限らず、例えば、図15〜図19に示されるように、アライメント系AL1、AL21〜AL24を用いたアライメント動作及びこれに伴う移動動作を行っている間にも、検出装置PDY1(PDY2)の検出ビームがスケール39Y2(39Y1)の全域に照射されることから、この間に、検出装置PDY1(PDY2)を用いて、スケール39Y2(39Y1)上面の異物の検出(検査)を行うこととしても良い。すなわち、異物検出動作はその少なくとも一部が露光動作とは異なる他の動作と並行して実行されても良い。なお、異物検出動作はその少なくとも一部が単独で実行されても良い。この場合、異物の検出装置は図3と異なる配置、及び/又は数としても良い。
【0142】
本実施形態において、上記異物の検出(検査)の結果、スケール表面に異物が存在すると判断された場合には、主制御装置20は、異物検出結果に基づいて、スケールの洗浄(又は交換)を行うか、あるいは露光動作(アライメント動作なども含む)を続行するかを、例えば動作状況などに応じて判断し、露光動作(アライメント動作なども含む)を続行する場合には、その動作中に、異物と対向するヘッドを使わないように、異物を避けてヘッドを選択する。例えば、4つのヘッドユニットのうち、異物と対向しない3つのヘッドユニットのヘッドを選択する、あるいは、各ヘッドユニット内で、ヘッドの切替タイミングを変えるなどして、異物と対向しないヘッドを使う。すなわち、異物検出結果に基づいて、スケール上で異物が存在する領域を、エンコーダシステム200による計測が不能あるいは計測値が異常となる非計測領域として特定する。さらに、エンコーダシステム200によるウエハステージWSTの位置計測が行われる動作、例えば露光動作では、ウエハステージWSTの位置に応じて非計測領域と対向しない3つのエンコーダヘッドを選択しながら、その選択される3つのエンコーダヘッドを用いてウエハステージWSTの位置を制御する。そして、例えば、その段階においてウエハステージWST上に載置されているウエハWに対する露光が終了した段階で、スケールの異物が存在する部分が、投影ユニットPU直下に位置するように、ステージ駆動系124を介してウエハステージWSTを移動する。すなわち、異物を含むスケールの一部が液浸領域14内に移動する。局所液浸装置8は、液体Lqの供給と回収とを並行して行っているので、液浸領域14内に移動した異物は液体Lqと一緒に回収される。これにより、スケール上の異物が除去される(洗浄される)。
【0143】
そして、上記の異物除去が終了した段階で、主制御装置20は、ウエハステージWSTを元の位置まで戻し、それまで行われた動作の続きを実行する。ここでは、ウエハWの露光、及び異物の除去が完了しているので、ウエハステージWSTをアンロードポジションUPまで移動してウエハの交換を行い、露光シーケンスを続行する。なお、ウエハWの露光終了直後に異物除去を行うものとしたが、例えば、露光シーケンスが終了した時点で異物除去シーケンスを実行する、すなわち異物除去動作を開始しても良い。また、異物検出結果から特定されるスケールの非計測領域は、異物が存在する領域のみでも良いが、異物よりも大きな領域としても良い。
【0144】
一方、異物検出結果に基づいて、スケールの洗浄(又は交換)を行うと判断された場合には、主制御装置20は、直ちに露光動作を中止し、必要な処理を行う。なお、露光動作を直ちに中止しないで、ウエハWの露光が終了した段階で必要な処理を開始しても良い。また、露光動作に先立って異物検出動作が行われる場合、異物検出結果に基づいて露光動作を実行可能か否か判断しても良い。一例として、スケール上に異物が存在しない、異物が存在してもエンコーダシステムによる計測が可能ある、あるいは異物(非計測領域)を避けて3つのヘッドを選択可能である場合は、露光動作を実行可能と判断する。一方、異物によるエンコーダシステムの計測不良によってウエハステージWSTの制御精度(又はレチクルパターンに対するウエハのアライメント精度)が許容値を超える場合は、露光動作を実行不能と判断して必要な処理(スケールの洗浄又は交換など)を実行する。
【0145】
以上説明したように、本実施形態によると、ウエハステージWSTの位置を計測するために用いられるスケール39X1,39X2,39Y1,39Y2に対して検出装置PDX1〜PDX4,PDY1,PDY2の照射系69Aからの検出ビームを照射し、スケール39X1,39X2,39Y1,39Y2を介した(スケール39X1,39X2,39Y1,39Y2上で散乱した)検出ビームを受光系69Bで検出することにより、スケールの表面状態(異物の存在状態)を検出するので、スケールに対して非接触で表面状態の検出を行うことが可能である。
【0146】
また、本実施形態によると、検出装置により、スケールの表面状態(異物の存在状態)を検出することができるため、該表面状態を考慮して、スケールを用いたウエハステージWSTの位置計測を行うことにより、高精度なウエハステージWSTの位置制御を行うことが可能である。特に本実施形態では、検出装置の検出の結果、異物が発見された場合には、その異物を除去した後に、露光動作を行うこととしているので、異物の影響を受けることなく高精度なウエハステージWSTの位置制御を行うことが可能である。
【0147】
また、上記のように高精度なウエハステージWSTの位置制御を行うことができるため、ウエハステージWSTに保持されたウエハWに対する露光を精度良く行うことが可能である。
【0148】
また、本実施形態によると、検出装置により、CDバー46上の基準格子52の表面状態(異物の存在状態)も検出するため、該表面状態を考慮(異物を除去するなど)して、Sec-BCHK(インターバル)を行うことで、セカンダリアライメント系AL2n(の検出中心)の、プライマリアライメント系AL1(の検出中心)を基準とする相対位置関係を高精度に検出することが可能である。また、この結果を用いて露光を行うことで高精度な露光を実現可能である。
【0149】
また、本実施形態によると、計測の短期安定性が良好なエンコーダ70A〜70D等を含むエンコーダシステムによってウエハステージWSTのXY平面内の位置情報を計測するので、空気揺らぎなどの影響を受けることなく、高精度に計測することができる。
【0150】
なお、上記実施形態では、露光装置100の露光動作、アライメント動作、又はウエハ交換動作などを行うのと並行して、スケール表面の異物の検出(検査)を行うこととしたが、本発明はこれに限られるものではない。例えば、露光装置100がアイドル状態(すなわち、露光動作、アライメント動作、及びウエハ交換動作などのいずれも行っていない待機状態)にあるときに、スケール表面全域に検出装置の検出ビームが照射されるようにウエハステージWSTを移動させて、スケール表面の異物検査を行うこととしても良い。
【0151】
また、異物検査のタイミングとしては、上記実施形態のように、ウエハ1枚を露光するごとに異物検査を行う場合に限らず、所定枚数のウエハを露光する度、又は所定時間経過するごとなど、所定間隔毎に行うこととしても良いし、作業者による指示があったとき(露光装置100の入力装置(例えば、検査開始ボタン)に対する入力があったとき)にのみ行うこととしても良い。また、所定間隔ごとに異物の検出(検査)を行うとともに、作業者から指示があったときにも異物の検出(検査)を行うようなシーケンスを採用しても良い。また、1枚のウエハに対する露光を行う際に、スケールの一部の異物検査を行い、残りの部分の異物検査は、それ以降のウエハに対する露光を行う際に行うようなシーケンスを採用しても良い。
【0152】
なお、上記実施形態では、スケール表面に異物が存在していた場合に、局所液浸装置8の液体(液浸露光に用いる液体)を用いて、異物を除去(洗浄)することとしていたが、これに限られるものではなく、例えば、液浸露光に用いる液体とは異なる液体(洗浄液)を局所液浸装置8から供給して、該洗浄液を用いて異物を除去(洗浄)することとしても良い。この洗浄液としては、たとえば、液体Lqよりも酸素濃度が高い液体(例えば、脱気処理を施さない液体)を用いることとしても良い。このような液体を用いて洗浄を行うことで、異物(例えば有機物から成る異物)の酸化分解を促進させることが可能となる。なお、このような液体に代えて、例えば過酸化水素水を用いて洗浄を行うこととしても良い。また、液浸露光用あるいは洗浄用の液体によるスケールの洗浄時、例えば、露光光ILによる光洗浄、及び/又は超音波洗浄などを併用しても良い。
【0153】
また、局所液浸装置8と同様の装置を露光装置100に設けておき、該装置を用いて、スケール上の異物の除去を行うこととしても良い。すなわち、局所液浸装置8と少なくとも一部が異なる洗浄装置(異物除去装置)を投影光学系PL(ノズルユニット32)とは別の位置、例えば投影光学系PLを介して露光光ILが照射される露光位置とウエハの交換位置との間のウエハステージWSTの移動経路上に設けても良い。
【0154】
また、液体を用いて異物を除去する場合に限らず、気体を噴出するエアブロー装置を露光装置100内に設けておき、該エアブロー装置から噴出される気体を用いて、スケール表面の異物除去を行うこととしても良い。また、異物を加熱することにより除去する加熱装置を露光装置100内に設け、これを用いて異物を除去することとしても良い。
【0155】
また、スケール表面に異物が存在する場合に、主制御装置20が作業者(オペレータ)に対して警告を発するのみでも良い。この場合、作業者(オペレータ)は、露光装置を停止してメンテナンス作業を行うこととしても良い。また、上記実施形態では、異物が所定個数以上存在した場合にのみ、異物除去作業を行う(又は警告を発する)ようにしても良い。あるいは、前述のように露光動作が実行不能となる場合にのみ、異物除去動作を行う、又は警告を発するようにしても良い。
【0156】
なお、上記実施形態の露光装置100では、図3に示されるように、6つの検出装置(PDX1〜PDX4、PDY1、PDY2)を設けることとしたが、これに限らず、スケールの全域に対して検出ビームを照射することができれば、その数は問わない。また、検出装置の配置についても、スケールの全域に対して検出ビームを照射することができるのであれば、上記実施形態の配置に限られるものではない。なお、異物検出を行う領域は、スケールの全面でも良いし、ウエハステージWSTの位置計測に必要な領域のみでも良い。
【0157】
なお、これまでは、スケール上の異物がごみ又は水滴である場合について説明したが、検出装置の検出の対象である異物は、ごみ、あるいは水滴に限られない。
【0158】
また、上記実施形態では、エンコーダシステム200のエンコーダによる位置計測に関連して、スケール上の異物の検出、及びこれに伴う種々の処理を行う場合について説明したが、スケールを検出面とする前述のZセンサについても同様に適用できる。すなわち、異物(非計測領域)を避けてZセンサを選択する、異物によってZセンサの計測不良が生じるならスケールの洗浄又は交換を行うなどの処理を行うことができる。
【0159】
また、上記実施形態では、図7(A)に示されるように、ビームスプリッタなどの光学素子で光源からの光を分岐し、分岐後の光を反射する2枚の反射ミラーを備えた回折干渉方式のエンコーダをエンコーダ70A〜70Fとして用いるものとしたが、これに限らず、3格子の回折干渉式のエンコーダ、ピックアップ方式、磁気方式、あるいは、例えば、特開2005−114406号公報などに開示されるような、光反射ブロックを備えたエンコーダ、例えば米国特許第6,639,686号明細書などに開示されるいわゆるスキャンエンコーダなどを用いても良い。また、上記実施形態では、ヘッドユニット62A〜62Dは、所定間隔で配置された複数のヘッドを有するものとしたが、これに限らず、Yスケール又はXスケールのピッチ方向に細長く延びる領域に光ビームを射出する光源と、光ビームのYスケール又はXスケール(回折格子)からの反射光(回折光)を受光する、Yスケール又はXスケールのピッチ方向に隙間無く配列された多数の受光素子とを備えた単一のヘッドを採用しても良い。
【0160】
また、上記実施形態では、エンコーダヘッドとしてXヘッド又はYヘッド、すなわち一次元のヘッドを用いるものとしたが、これに限らず、直交2軸方向を計測方向とする2次元ヘッド(2Dヘッド)を用いても良い。また、エンコーダヘッドとしてZセンサとの一体型のヘッドを用いても良い。後者の場合、Zセンサとエンコーダヘッドとの単なる組み合わせでも良いが、Zセンサとエンコーダヘッドとの機能を備えた単一のセンサを、エンコーダヘッドとして用いても良い。
【0161】
また、上記実施形態では、第2撥水板28bが、2枚の板状部材29a,29bを貼りあわせることにより形成された場合について説明したが、これに限らず、第2撥水板28bを1枚の板状部材で構成し、その上面に直接回折格子を形成することとしても良い。また、第2撥水板28bの上面に回折格子を形成し、撥水板28bの上面にヘッドユニット62A〜62Dからの検出光が透過可能な保護部材(例えば、薄膜)を設け、回折格子の損傷などを防止しても良い。また、ウエハステージWST表面に回折格子を直接形成し、その回折格子を覆うように、第2撥水板28bを設けることとしても良い。また、回折格子としては、狭いスリット又は溝等が機械的に刻まれたものを採用しても良いし、例えば、感光性樹脂に干渉縞を焼き付けて作成したものを採用しても良い。
【0162】
また、上記実施形態では、XY平面とほぼ平行なウエハステージWSTの上面に反射型の回折格子を設けるものとしたが、例えばウエハステージWSTの下面に反射型の回折格子を設けても良い。この場合、ヘッドユニット62A〜62DはウエハステージWSTの下面が対向する、例えばベースプレートに配置される。さらに、例えば米国特許出願公開第2006/0227309号、第2007/0052976号、第2007/0263197号などに開示されているように、ウエハステージWSTにエンコーダヘッドを設け、これに対向してウエハステージWSTの上方にスケールを設けるエンコーダシステムを採用しても良い。この場合、ウエハステージWSTにZセンサをも配置してよく、スケールの所定面(例えば表面)を、Zセンサからの計測ビームを反射する反射面として兼用しても良い。また、例えば、ベース盤12に配置される可動体に前述の検出装置を設け、可動体を移動しながらスケールの全面で異物検出を行っても良い。さらに、その可動体に前述の異物除去装置も設け、異物検出結果に基づいてスケールの異物を除去しても良い。なお、可動体は計測ステージMSTでも良いし、ウエハステージWST及び計測ステージMSTとは別に設けても良い。また、前述の検出装置と異物除去装置とを異なる可動体に搭載しても良い。また、上記実施形態ではウエハステージWSTを水平面内で移動させるものとしたが、水平面と交差する平面(例えば、ZX平面など)内で移動させても良い。また、レチクルステージRSTの位置をエンコーダシステムによって計測しても良い。例えば、レチクルステージRSTが2次元移動する場合、前述のエンコーダシステムと同様の構成のエンコーダシステムを設けてレチクルステージRSTの位置情報を計測しても良い。この場合、レチクルステージRSTに設けられるスケール(回折格子)上の異物を検出するために、例えば前述の検出装置を用いることとしても良い。いずれにしても、回折格子(スケール)に対向する位置に上記実施形態の検出装置を設けることで、スケール上の異物を検出することが可能である。
【0163】
また、異物を検出する検出装置としては、上記実施形態(図4(A))のような構成に限られるものではなく、スケールに対して検出ビームを照射し、該スケールを介した検出ビームを受光することにより異物を検出する検出装置であれば、その他の構成を採用しても良い。例えば、前述の多点AF系を検出装置として用いても良く、この場合、多点AF系とは別に前述の検出装置を設けなくても良い。また、例えば、前述したZセンサなどを用いて、ウエハステージWST上面のウエハWが載置される領域以外の領域の表面(スケール表面を含む)、すなわちZセンサの計測面のZ位置を検出する場合などには、検出装置は、スケールに限らず、ウエハステージWST上面のウエハWが載置される領域以外の領域の表面(計測面)の異物を検出することとすれば良い。このようにすると、上記実施形態において各検出装置によりスケール上の異物を検出する場合と同様にして、上記実施形態の各検出装置と同じ又は異なる検出装置により、上記計測面上の異物を検出することができ、これによって上記実施形態と同等の効果を得ることができる。
【0164】
なお、上記実施形態ではノズルユニット32の下面と投影光学系PLの先端光学素子の下端面とがほぼ同一面であるものとしたが、これに限らず、例えばノズルユニット32の下面を、先端光学素子の射出面よりも投影光学系PLの像面(すなわちウエハ)の近くに配置しても良い。すなわち、局所液浸装置8は上述の構造に限られず、例えば、欧州特許公開第1420298号公報、国際公開第2004/055803号、国際公開第2004/057590号、国際公開第2005/029559号(対応米国特許公開第2006/0231206号)、国際公開第2004/086468号(対応米国特許公開第2005/0280791号)、特開2004−289126号公報(対応米国特許第6,952,253号)などに記載されているものを用いることができる。また、例えば国際公開第2004/019128号(対応米国特許公開第2005/0248856号)に開示されているように、先端光学素子の像面側の光路に加えて、先端光学素子の物体面側の光路も液体で満たすようにしても良い。さらに、先端光学素子の表面の一部(少なくとも液体との接触面を含む)又は全部に、親液性及び/又は溶解防止機能を有する薄膜を形成しても良い。なお、石英は液体との親和性が高く、かつ溶解防止膜も不要であるが、蛍石は少なくとも溶解防止膜を形成することが好ましい。
【0165】
なお、上記実施形態では、液体として純水(水)を用いるものとしたが、本発明がこれに限定されないことは勿論である。
【0166】
また、上記実施形態で、回収された液体を再利用するようにしても良く、この場合は回収された液体から不純物を除去するフィルタを液体回収装置、又は回収管等に設けておくことが望ましい。
【0167】
なお、上記実施形態では、露光装置が液浸型の露光装置である場合について説明したが、これに限られるものではなく、液体(水)を介さずにウエハWの露光を行うドライタイプの露光装置にも採用することができる。
【0168】
なお、上記実施形態では、ウエハステージWST(移動体)、計測ステージMST(別の移動体)、アライメント系(AL1、AL21〜AL24)、多点AF系(90a,90b)、干渉計システム118、及びエンコーダシステム200などの全てを備えた露光装置に本発明が適用された場合について説明したが、本発明がこれに限定されるものでない。例えば、計測ステージMSTなどが設けられていない露光装置にも、本発明は適用が可能である。また、干渉計システムとエンコーダシステムとは、必ずしも両方設ける必要はないことは勿論である。すなわち、エンコーダシステムのみを設けるだけでも良い。
【0169】
なお、上記実施形態では、アライメント系としては、FIA系を採用した場合について説明したが、これに限らず、例えばコヒーレントな検出光を対象マークに照射し、その対象マークから発生する散乱光又は回折光を検出する、あるいはその対象マークから発生する2つの回折光(例えば同次数の回折光、あるいは同方向に回折する回折光)を干渉させて検出するアライメントセンサを単独であるいは適宜組み合わせて用いることは勿論可能である。また、上記実施形態では5つのアライメント系AL1、AL21〜AL24を設けるものとしているが、その数は5つに限られるものでなく、2つ以上かつ4つ以下、あるいは6つ以上でも良いし、奇数ではなく偶数でも良い。さらに、アライメント系は1つでも良いし、可動及び固定のいずれでも良い。
【0170】
また、上記実施形態では、ステップ・アンド・スキャン方式等の走査型露光装置に本発明が適用された場合について説明したが、これに限らず、ステッパなどの静止型露光装置に本発明を適用しても良い。ステッパなどであっても、露光対象の物体が搭載されたステージの位置をエンコーダで計測することにより、同様に、空気揺らぎに起因する位置計測誤差の発生を殆ど零にすることができる。この場合、エンコーダの計測値の短期変動を干渉計の計測値を用いて補正する補正情報とエンコーダの計測値とに基づいて、ステージを高精度に位置決めすることが可能になり、結果的に高精度なレチクルパターンの物体上への転写が可能になる。また、ショット領域とショット領域とを合成するステップ・アンド・スティッチ方式の縮小投影露光装置、プロキシミティー方式の露光装置、又はミラープロジェクション・アライナーなどにも本発明は適用することができる。さらに、例えば特開平10−163099号公報及び特開平10−214783号公報(対応米国特許第6,590,634号)、特表2000−505958号公報(対応米国特許第5,969,441号)、米国特許第6,208,407号などに開示されているように、複数のウエハステージを備えたマルチステージ型の露光装置にも本発明を適用できる。
【0171】
また、上記実施形態の露光装置における投影光学系は縮小系のみならず等倍および拡大系のいずれでも良いし、投影光学系PLは屈折系のみならず、反射系及び反射屈折系のいずれでも良いし、その投影像は倒立像及び正立像のいずれでも良い。さらに、投影光学系PLを介して照明光ILが照射される露光領域IAは、投影光学系PLの視野内で光軸AXを含むオンアクシス領域であるが、例えば国際公開第2004/107011号に開示されるように、複数の反射面を有しかつ中間像を少なくとも1回形成する光学系(反射系又は反屈系)がその一部に設けられ、かつ単一の光軸を有する、いわゆるインライン型の反射屈折系と同様に、その露光領域は光軸AXを含まないオフアクシス領域でも良い。また、前述の照明領域及び露光領域はその形状が矩形であるものとしたが、これに限らず、例えば円弧、台形、あるいは平行四辺形などでも良い。
【0172】
なお、上記実施形態の露光装置の光源は、ArFエキシマレーザに限らず、KrFエキシマレーザ(出力波長248nm)、F2レーザ(出力波長157nm)、Ar2レーザ(出力波長126nm)、Kr2レーザ(出力波長146nm)などのパルスレーザ光源、あるいはg線(波長436nm)、i線(波長365nm)などの輝線を発する超高圧水銀ランプなどを用いることも可能である。また、YAGレーザの高調波発生装置などを用いることもできる。この他、例えば国際公開第1999/46835号(対応米国特許7,023,610号)に開示されているように、真空紫外光としてDFB半導体レーザ又はファイバーレーザから発振される赤外域、又は可視域の単一波長レーザ光を、例えばエルビウム(又はエルビウムとイッテルビウムの両方)がドープされたファイバーアンプで増幅し、非線形光学結晶を用いて紫外光に波長変換した高調波を用いても良い。
【0173】
また、上記実施形態では、露光装置の照明光ILとしては波長100nm以上の光に限らず、波長100nm未満の光を用いても良いことはいうまでもない。例えば、近年、70nm以下のパターンを露光するために、SOR又はプラズマレーザを光源として、軟X線領域(例えば5〜15nmの波長域)のEUV(Extreme Ultraviolet)光を発生させるとともに、その露光波長(例えば13.5nm)の下で設計されたオール反射縮小光学系、及び反射型マスクを用いたEUV露光装置の開発が行われている。この装置においては、円弧照明を用いてマスクとウエハを同期走査してスキャン露光する構成が考えられるので、かかる装置にも本発明を好適に適用することができる。この他、電子線又はイオンビームなどの荷電粒子線を用いる露光装置にも、本発明は適用できる。
【0174】
また、上述の実施形態においては、光透過性の基板上に所定の遮光パターン(又は位相パターン・減光パターン)を形成した光透過型マスク(レチクル)を用いたが、このレチクルに代えて、例えば米国特許第6,778,257号公報に開示されているように、露光すべきパターンの電子データに基づいて、透過パターン又は反射パターン、あるいは発光パターンを形成する電子マスク(可変成形マスク、アクティブマスク、あるいはイメージジェネレータとも呼ばれ、例えば非発光型画像表示素子(空間光変調器)の一種であるDMD(Digital Micro-mirror Device)などを含む)を用いても良い。
【0175】
また、例えば国際公開第2001/035168号に開示されているように、干渉縞をウエハ上に形成することによって、ウエハ上にライン・アンド・スペースパターンを形成する露光装置(リソグラフィシステム)にも本発明を適用することができる。
【0176】
さらに、例えば特表2004−519850号公報(対応米国特許第6,611,316号)に開示されているように、2つのレチクルパターンを投影光学系を介してウエハ上で合成し、1回のスキャン露光によってウエハ上の1つのショット領域をほぼ同時に二重露光する露光装置にも本発明を適用することができる。
【0177】
また、物体上にパターンを形成する装置は、前述の露光装置(リソグラフィシステム)に限られず、例えばインクジェット方式にて物体上にパターンを形成する装置にも本発明を適用することができる。
【0178】
なお、上記実施形態でパターンを形成すべき物体(エネルギビームが照射される露光対象の物体)はウエハに限られるものではなく、ガラスプレート、セラミック基板、フィルム部材、あるいはマスクブランクスなど、他の物体でも良い。
【0179】
露光装置の用途としては半導体製造用の露光装置に限定されることなく、例えば、角型のガラスプレートに液晶表示素子パターンを転写する液晶用の露光装置、有機EL、薄膜磁気ヘッド、撮像素子(CCD等)、マイクロマシン及びDNAチップなどを製造するための露光装置にも広く適用できる。また、半導体素子などのマイクロデバイスだけでなく、光露光装置、EUV露光装置、X線露光装置、及び電子線露光装置などで使用されるレチクル又はマスクを製造するために、ガラス基板又はシリコンウエハなどに回路パターンを転写する露光装置にも本発明を適用できる。
【0180】
また、上記実施形態の露光装置(パターン形成装置)は、本願請求の範囲に挙げられた各構成要素を含む各種サブシステムを、所定の機械的精度、電気的精度、光学的精度を保つように、組み立てることで製造される。これら各種精度を確保するために、この組み立ての前後には、各種光学系については光学的精度を達成するための調整、各種機械系については機械的精度を達成するための調整、各種電気系については電気的精度を達成するための調整が行われる。各種サブシステムから露光装置への組み立て工程は、各種サブシステム相互の、機械的接続、電気回路の配線接続、気圧回路の配管接続等が含まれる。この各種サブシステムから露光装置への組み立て工程の前に、各サブシステム個々の組み立て工程があることはいうまでもない。各種サブシステムの露光装置への組み立て工程が終了したら、総合調整が行われ、露光装置全体としての各種精度が確保される。なお、露光装置の製造は温度およびクリーン度等が管理されたクリーンルームで行うことが望ましい。
【0181】
半導体素子などの電子デバイスは、デバイスの機能・性能設計を行うステップ、この設計ステップに基づいたレチクルを製作するステップ、シリコン材料からウエハを製作するステップ、上記実施形態の露光装置(パターン形成装置)によりマスク(レチクル)のパターンをウエハに転写するリソグラフィステップ、露光されたウエハを現像する現像ステップ、レジストが残存している部分以外の部分の露出部材をエッチングにより取り去るエッチングステップ、エッチングが済んで不要となったレジストを取り除くレジスト除去ステップ、デバイス組み立てステップ(ダイシング工程、ボンディング工程、パッケージ工程を含む)、検査ステップ等を経て製造される。この場合、リソグラフィステップで、上記実施形態の露光装置(パターン形成装置)を用いて前述の露光方法が実行され、ウエハ上にデバイスパターンが形成されるので、高集積度のデバイスを生産性良く製造することができる。
【産業上の利用可能性】
【0182】
以上説明したように、本発明の検出装置は、移動体に設けられた計測面の表面状態を検出するのに適している。また、本発明の移動体装置は、露光装置に用いるのに適している。また、本発明のパターン形成装置及び方法は、移動体に保持された物体上にパターンを形成するのに適している。また、本発明の露光装置は、エネルギビームで物体を露光して、前記物体にパターンを形成するのに適している。また、本発明のデバイス製造方法は、半導体素子、液晶表示素子等の電子デバイスを製造するのに適している。
【符号の説明】
【0183】
8…局所液浸装置、20…主制御装置、29a…板状部材、29b…板状部材、39Y1,39Y2…Yスケール、39X1,39X2…Xスケール、50…ステージ装置、62A〜62D…ヘッドユニット、69A…照射系、69B…受光系、70A,70C…Yエンコーダ、70B、70D…Xエンコーダ、70E,70F…Yリニアエンコーダ、100…露光装置、191…先端レンズ、BA…照射領域、IL…照明光、MST…計測ステージ、PDX1〜PDX4,PDY1,PDY2…検出装置、W…ウエハ、WST…ウエハステージ。
【技術分野】
【0001】
本発明は、検出装置、移動体装置、パターン形成装置及びパターン形成方法、露光装置及びデバイス製造方法に係り、更に詳しくは、計測部材の表面状態を検出する検出装置、該検出装置を備える移動体装置、該移動体装置を備えるパターン形成装置、移動体に保持された物体上にパターンを形成するパターン形成方法、前記物体をエネルギビームで露光する露光装置、及び前記パターン形成方法を用いるデバイス製造方法に関する。
【背景技術】
【0002】
従来、半導体素子(集積回路等)、液晶表示素子等の電子デバイス(マイクロデバイス)を製造するリソグラフィ工程では、ステップ・アンド・リピート方式の投影露光装置(いわゆるステッパ)、ステップ・アンド・スキャン方式の投影露光装置(いわゆるスキャニング・ステッパ(スキャナとも呼ばれる))などが、主として用いられている。
【0003】
これらのステッパ、又はスキャナ等では、被露光基板(例えばウエハ)を保持するステージの位置計測は、高分解能なレーザ干渉計を用いて行われるのが、一般的である。しかるに、レーザ干渉計のビームの光路長は数百mm程度以上もある。また、半導体素子の高集積化に伴う、パターンの微細化により、より高精度なステージの位置制御性能が要求されるようになってきた。このような理由により、今や、レーザ干渉計のビーム路上の雰囲気の温度揺らぎ(空気揺らぎ)に起因する計測値の短期的な変動が無視できなくなりつつある。
【0004】
そこで、最近においては、ステージの位置を計測する装置として、レーザ干渉計よりも温度揺らぎ(空気揺らぎ)に起因する計測値の短期的な変動が小さいリニアエンコーダを用いる技術が提案されている(例えば、特許文献1参照)。このようなリニアエンコーダを用いる場合に、スケール上に異物が存在すると、その異物により計測誤差が生じたり、計測ができなくなったりするおそれがある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2007/097379号
【発明の概要】
【課題を解決するための手段】
【0006】
本発明は、上述した事情の下になされたものであり、その第1の態様によれば、移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の、表面状態を検出する検出装置であって、前記計測部材に対して光ビームを照射する照射系と、前記計測部材を介した光ビームを検出する検出系と、を備える検出装置が提供される。
【0007】
これによれば、計測部材に対して非接触で表面状態の検出を行うことが可能である。
【0008】
本発明の第2の態様によれば、計測部材が設けられた移動体と、前記計測部材と対向するヘッドを有し、該ヘッドによって前記移動体の前記所定方向の位置情報を計測する計測装置と、前記計測部材の表面状態を検出する本発明の検出装置と、を備える第1の移動体装置が提供される。
【0009】
これによれば、検出装置により、計測部材に対して非接触で、計測部材の表面状態が検出されるので、検出装置の検出動作が移動体の移動の邪魔をすることが無い。また、計測部材の表面状態(異物の付着状態など)を考慮することで、該表面状態に起因する計測装置の計測精度の悪化を抑制することができ、これにより、高精度な移動体の移動制御を行うことが可能となる。
【0010】
本発明の第3の態様によれば、前記移動体が物体を保持する本発明の第1の移動体装置と、前記物体上にパターンを生成するパターン生成装置と、を備える第1のパターン形成装置が提供される。
【0011】
これによれば、移動体の位置制御(物体の位置制御)を精度良く行うことができるので、該移動体に保持された物体上に、パターン生成装置によりパターンを生成することで、物体上へ高精度なパターン生成を行うことが可能となる。
【0012】
本発明の第4の態様によれば、エネルギビームにより物体を露光して、前記物体にパターンを形成する露光装置であって、前記移動体が前記物体を保持する本発明の第1の移動体装置を備える第1の露光装置が提供される。
【0013】
これによれば、移動体の位置情報の計測を精度良く行うことができるので、該移動体に保持された物体に対してパターンを精度良く形成することが可能となる。
【0014】
本発明の第5の態様によれば、計測部材が設けられた移動体と、前記計測部材に対向するとき該計測部材に計測ビームを照射し、前記計測部材を介した前記計測ビームを受光するヘッドを有し、該ヘッドによって前記移動体の所定方向の位置情報を計測する計測装置と、前記計測部材の表面状態を検出する検出装置と、を備える第2の移動体装置が提供される。
【0015】
これによれば、検出装置により、計測部材の表面状態が検出されるので、計測部材の表面状態(異物の付着状態など)を考慮することで、該表面状態に起因する計測装置の計測精度の悪化を抑制することができる。これにより、高精度な移動体の移動制御を行うことが可能となる。
【0016】
本発明の第6の態様によれば、前記移動体が物体を保持する本発明の第2の移動体装置と、前記物体上にパターンを生成するパターン生成装置と、を備える第2のパターン形成装置が提供される。
【0017】
これによれば、移動体の位置制御(物体の位置制御)を精度良く行うことができるので、該移動体に保持された物体上に、パターン生成装置によりパターンを生成することで、物体上へ高精度なパターン生成を行うことが可能となる。
【0018】
本発明の第7の態様によれば、エネルギビームにより物体を露光して、前記物体にパターンを形成する露光装置であって、前記移動体が前記物体を保持する本発明の第2の移動体装置を備える第2の露光装置が提供される。
【0019】
これによれば、移動体の位置情報の計測を精度良く行うことができるので、該移動体に保持された物体に対してパターンを精度良く形成することが可能となる。
【0020】
本発明の第8の態様によれば、載置された物体を保持して所定の平面内を移動する移動体と、前記移動体の前記物体が載置された前記平面に平行な一面と対向するヘッドを有し、該ヘッドによって前記移動体の前記一面の前記物体の載置領域外の領域に計測ビームを照射することで、前記移動体の所定方向の位置情報を計測する計測装置と、前記移動体の前記一面の前記物体の載置領域外の領域の表面状態を検出する検出装置と、を備える第3の移動体装置が提供される。
【0021】
これによれば、検出装置により、移動体の一面の物体の載置領域外の領域の表面状態が検出されるので、計測装置からの検出ビームが照射される、移動体の一面の物体の載置領域外の領域の表面状態(異物の付着状態など)を考慮することで、該表面状態に起因する計測装置の計測精度の悪化を抑制することができる。これにより、高精度な移動体の所定方向の位置制御を行うことが可能となる。
【0022】
本発明の第9の態様によれば、本発明の第3の移動体装置と、前記移動体に載置された物体上にパターンを生成するパターン生成装置と、を備える第3のパターン形成装置である。
【0023】
これによれば、移動体の位置制御(物体の位置制御)を精度良く行うことができるので、該移動体に保持された物体上に、パターン生成装置によりパターンを生成することで、物体上へ高精度なパターン生成を行うことが可能となる。
【0024】
本発明の第10の態様によれば、移動体に保持された物体上にパターンを形成するパターン形成工程と、前記移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の表面状態を検出する検出工程と、を含む第1のパターン形成方法が提供される。
【0025】
これによれば、計測部材の表面状態(異物の付着状態など)による影響を回避した状態で、物体上へのパターン生成を高精度に行うことが可能となる。
【0026】
本発明の第11の態様によれば、移動体に保持された物体上にパターンを形成するパターン形成工程と、前記移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の表面上に存在する異物を除去する異物除去工程と、を含む第2のパターン形成方法が提供される。
【0027】
これによれば、異物除去工程において、移動体に設けられた計測部材に存在する異物を除去するので、パターン形成工程において、計測部材に存在する異物の影響を受けることなく、物体上にパターンを形成することが可能となる。
【0028】
本発明の第12の態様によれば本発明の第1又は第2のパターン形成方法により物体上にパターンを形成する工程と、パターンが形成された前記物体に処理を施す工程と、を含むデバイス製造方法が提供される。
【図面の簡単な説明】
【0029】
【図1】一実施形態に係る露光装置を示す概略図である。
【図2】図1のステージ装置を示す平面図である。
【図3】図1の露光装置が備える各種計測装置(エンコーダ、アライメント系、多点AF系など)の配置を示す平面図である。
【図4】図4(A)は、図3の検出装置の構成を示す斜視図であり、図4(B)は、図4(A)の送光系から射出される検出ビームのスケールに対する入射状態を示す図である。
【図5】一実施形態に係る露光装置の制御系の主要な構成を示すブロック図である。
【図6】図6(A)及び図6(B)は、アレイ状に配置された複数のヘッドをそれぞれ含む複数のエンコーダによるウエハステージのXY平面内の位置計測及びヘッド間の計測値の引き継ぎについて説明するための図である。
【図7】図7(A)は、エンコーダの構成の一例を示す図、図7(B)は、検出光として格子RGの周期方向に長く延びる断面形状のレーザビームLBが用いられた場合を示す図である。
【図8】ウエハステージ上のウエハに対するステップ・アンド・スキャン方式の露光が行われている状態のウエハステージ及び計測ステージの状態を示す図である。
【図9】ウエハステージ側で、ウエハに対する露光が終了した段階のウエハステージ及び計測ステージの状態を示す図である。
【図10】露光終了後に、ウエハステージと計測ステージとが離間した状態から両ステージが接触する状態に移行した直後の両ステージの状態を示す図である。
【図11】ウエハステージと計測ステージとのY軸方向の位置関係を保ちつつ、計測ステージが−Y方向に移動し、ウエハステージがアンローディングポジションに向けて移動しているときの両ステージの状態を示す図である。
【図12】計測ステージがSec-BCHK(インターバル)を行う位置に到達したときのウエハステージと計測ステージとの状態を示す図である。
【図13】Sec-BCHK(インターバル)が行われるのと並行して、ウエハステージがアンロードポジションからローディングポジションに移動したときのウエハステージと計測ステージとの状態を示す図である。
【図14】計測ステージが最適スクラム待機位置へ移動し、ウエハがウエハステージ上にロードされたときのウエハステージと計測ステージとの状態を示す図である。
【図15】計測ステージが最適スクラム待機位置で待機中に、ウエハステージがPri-BCHKの前半の処理を行う位置へ移動したときの両ステージの状態を示す図である。
【図16】アライメント系AL1,AL22,AL23を用いて、3つのファーストアライメントショット領域に付設されたアライメントマークを同時検出しているときのウエハステージと計測ステージとの状態を示す図である。
【図17】アライメント系AL1,AL21〜AL24を用いて、5つのセカンドアライメントショット領域に付設されたアライメントマークを同時検出しているときのウエハステージと計測ステージとの状態を示す図である。
【図18】アライメント系AL1,AL21〜AL24を用いて、5つのサードアライメントショット領域に付設されたアライメントマークを同時検出しているときのウエハステージと計測ステージとの状態を示す図である。
【図19】アライメント系AL1,AL22,AL23を用いて、3つのフォースアライメントショット領域に付設されたアライメントマークを同時検出しているときのウエハステージと計測ステージとの状態を示す図である。
【図20】フォーカスマッピングが終了したときのウエハステージと計測ステージとの状態を示す図である。
【図21】露光動作中のウエハステージと計測ステージとの状態を示す図である。
【発明を実施するための形態】
【0030】
以下、本発明の一実施形態を図1〜図21に基づいて説明する。
【0031】
図1には、一実施形態に係る露光装置100の構成が概略的に示されている。この露光装置100は、ステップ・アンド・スキャン方式の投影露光装置、すなわちスキャナである。後述するように本実施形態では、投影光学系PLが設けられており、以下においては、この投影光学系PLの光軸AXと平行な方向をZ軸方向、これに直交する面内でレチクルとウエハとが相対走査される方向をY軸方向、Z軸及びY軸に直交する方向をX軸方向とし、X軸、Y軸、及びZ軸回りの回転(傾斜)方向をそれぞれθx、θy、及びθz方向として説明を行う。
【0032】
露光装置100は、照明系10、該照明系10からの露光用照明光(以下、「照明光」又は「露光光」と呼ぶ)ILにより照明されるレチクルRを保持するレチクルステージRST、レチクルRから射出された照明光ILをウエハW上に投射する投影光学系PLを含む投影ユニットPU、ウエハステージWST及び計測ステージMSTを有するステージ装置50、及びこれらの制御系等を備えている。ウエハステージWST上には、ウエハWが載置されている。
【0033】
照明系10は、例えば特開2001−313250号公報(対応する米国特許出願公開第2003/0025890号明細書)などに開示されるように、光源と、オプティカルインテグレータ等を含む照度均一化光学系、レチクルブラインド等(いずれも不図示)を有する照明光学系とを含んでいる。この照明系10では、レチクルブラインド(マスキングシステム)で規定されたレチクルR上のスリット状の照明領域IARを照明光(露光光)ILによりほぼ均一な照度で照明する。ここで、照明光ILとしては、一例としてArFエキシマレーザ光(波長193nm)が用いられている。また、オプティカルインテグレータとしては、例えばフライアイレンズ、ロッドインテグレータ(内面反射型インテグレータ)あるいは回折光学素子などを用いることができる。
【0034】
レチクルステージRST上には、回路パターンなどがそのパターン面(図1における下面)に形成されたレチクルRが、例えば真空吸着により固定されている。レチクルステージRSTは、例えばリニアモータ等を含むレチクルステージ駆動系11(図1では不図示、図5参照)によって、XY平面内で微少駆動可能であるとともに、走査方向(図1における紙面内左右方向であるY軸方向)に指定された走査速度で駆動可能となっている。レチクルステージRSTの位置情報は、レチクル干渉計116によって常時計測されている。
【0035】
投影ユニットPUは、レチクルステージRSTの図1における下方に配置されている。投影ユニットPUは、鏡筒40と、該鏡筒40内に所定の位置関係で保持された複数の光学素子を有する投影光学系PLとを含む。投影光学系PLとしては、例えばZ軸方向と平行な光軸AXに沿って配列される複数のレンズ(レンズエレメント)から成る屈折光学系が用いられている。投影光学系PLは、例えば両側テレセントリックで所定の投影倍率(例えば1/4倍、1/5倍又は1/8倍など)を有する。このため、照明系10からの照明光ILによって照明領域IARが照明されると、投影光学系PLの第1面(物体面)とパターン面がほぼ一致して配置されるレチクルRを通過した照明光ILにより、投影光学系PL(投影ユニットPU)を介してその照明領域IAR内のレチクルRの回路パターンの縮小像(回路パターンの一部の縮小像)が、その第2面(像面)側に配置される、表面にレジスト(感光剤)が塗布されたウエハW上の前記照明領域IARに共役な領域(以下、「露光領域」とも呼ぶ)IAに形成される。不図示ではあるが、投影ユニットPUは、防振機構を介して3本の支柱で支持される鏡筒定盤に搭載されている。しかし、これに限らず、例えば国際公開第2006/038952号に開示されているように、投影ユニットPUの上方に配置される不図示のメインフレーム部材、あるいはレチクルステージRSTが配置されるベース部材などに対して投影ユニットPUを吊り下げ支持しても良い。
【0036】
なお、本実施形態の露光装置100では、液浸法を適用した露光が行われるので、ペッツヴァルの条件を満足し、かつ投影光学系の大型化を避けるために、ミラーとレンズとを含む反射屈折系(カタディ・オプトリック系)を用いても良い。
【0037】
また、本実施形態の露光装置100では、液浸法を適用した露光を行うため、投影光学系PLを構成する最も像面側(ウエハW側)の光学素子、ここではレンズ(以下、「先端レンズ」ともいう)191を保持する鏡筒40の下端部周囲を取り囲むように、局所液浸装置8の一部を構成するノズルユニット32が設けられている。本実施形態では、ノズルユニット32は、図1に示されるように、その下端面が先端レンズ191の下端面とほぼ同一面に設定されている。また、ノズルユニット32は、液体Lqの供給口及び回収口と、ウエハWが対向して配置され、かつ回収口が設けられる下面と、液体供給管31A及び液体回収管31Bとそれぞれ接続される供給流路及び回収流路とを備えている。
【0038】
本実施形態においては、液体供給管31A、供給流路、及び供給口を介して、液体供給装置5(図1では不図示、図5参照)から先端レンズ191とウエハWとの間に液体が供給されるとともに、回収口、回収流路、及び液体回収管31Bを介して、液体回収装置6(図1では不図示、図5参照)によって、先端レンズ191とウエハWとの間から液体が回収されることにより、先端レンズ191とウエハWとの間に、一定量の液体Lq(図1参照)が保持される。この場合、先端レンズ191とウエハWとの間に保持された液体Lqは、常に入れ替わっている。
【0039】
本実施形態では、上記の液体として、ArFエキシマレーザ光(波長193nmの光)が透過する純水(以下、特に必要な場合を除いて、単に「水」と記述する)を用いるものとする。ArFエキシマレーザ光に対する水の屈折率nは、ほぼ1.44である。この水の中では、照明光ILの波長は、193nm×1/n=約134nmに短波長化される。
【0040】
上記の説明から明らかなように、本実施形態では、ノズルユニット32、液体供給装置5、液体回収装置6、液体供給管31A及び液体回収管31B等を含み、局所液浸装置8が構成されている。なお、局所液浸装置8の一部、例えば少なくともノズルユニット32は、投影ユニットPUを保持するメインフレーム(前述の鏡筒定盤を含む)に吊り下げ支持されても良いし、メインフレームとは別のフレーム部材に設けても良い。あるいは、前述の如く投影ユニットPUが吊り下げ支持される場合は、投影ユニットPUと一体にノズルユニット32を吊り下げ支持しても良いが、本実施形態では投影ユニットPUとは独立に吊り下げ支持される計測フレームにノズルユニット32を設けている。この場合、投影ユニットPUを吊り下げ支持していなくても良い。
【0041】
なお、投影ユニットPU下方に計測ステージMSTが位置する場合にも、上記と同様に後述する計測ステージと先端レンズ191との間に水を満たすことが可能である。
【0042】
図1に戻り、ステージ装置50は、ベース盤12上に配置されたウエハステージWST及び計測ステージMST、これらのステージWST,MSTの位置情報を計測するY軸干渉計16,18を含む干渉計システム118(図5参照)、及び露光の際などにウエハステージWSTの位置情報を計測するのに用いられるエンコーダシステム200(図5参照)、ステージWST,MSTを駆動するステージ駆動系124(図5参照)、並びに後述する検出装置PDX1〜PDX4、PDY1、PDY2(図3及び図5等参照)などを備えている。
【0043】
ウエハステージWST,計測ステージMSTそれぞれの底面には、不図示の非接触軸受、例えば真空予圧型空気静圧軸受(以下、「エアパッド」と呼ぶ)が複数ヶ所に設けられており、これらのエアパッドからベース盤12の上面に向けて噴出された加圧空気の静圧により、ベース盤12上でウエハステージWST,計測ステージMSTが数μm程度のクリアランスを介して非接触で支持されている。また、ステージWST,MSTは、ステージ駆動系124によって、互いに独立して少なくともY軸方向及びX軸方向に駆動可能である。
【0044】
ウエハステージWSTには、ウエハWを真空吸着等によって保持するウエハホルダ(不図示)が設けられている。ウエハホルダはウエハステージWSTと一体に形成しても良いが、本実施形態ではウエハホルダとウエハステージWSTとを別々に構成し、例えば真空吸着などによってウエハホルダをウエハステージWSTの凹部内に固定している。また、ウエハステージWSTの上面には、ウエハホルダ上に載置されるウエハの表面とほぼ同一面となる、液体Lqに対して撥液化処理された表面(撥液面)を有し、かつ外形(輪郭)が矩形でその中央部にウエハホルダ(ウエハの載置領域)よりも一回り大きな円形の開口が形成されたプレート(撥液板)28が設けられている。プレート28は、低熱膨張率の材料、例えばガラス又はセラミックス(ショット社のゼロデュア(商品名)、Al2O3あるいはTiCなど)から成り、その表面には、例えばフッ素樹脂材料、ポリ四フッ化エチレン(テフロン(登録商標))等のフッ素系樹脂材料、アクリル系樹脂材料あるいはシリコン系樹脂材料などにより撥液膜が形成される。さらにプレート28は、ステージ装置50の平面図である図2に示されるように、円形の開口を囲む、外形(輪郭)が矩形の第1撥液領域28aと、第1撥液領域28aの周囲に配置される矩形枠状(環状)の第2撥液領域28bとを有する。第1撥液領域28aには、例えば露光動作時、ウエハの表面からはみ出す液浸領域14(例えば図3参照)の少なくとも一部が形成され、第2撥液領域28bには、後述のエンコーダシステムのためのスケールが形成される。なお、プレート28はその表面の少なくとも一部がウエハの表面と同一面でなくても良い、すなわち異なる高さであっても良い。また、プレート28は単一のプレートでも良いが、本実施形態では複数のプレート、例えば第1及び第2撥液領域28a、28bにそれぞれ対応する第1及び第2撥液板が組み合わせて構成される。本実施形態では、前述の如く液体Lqとして純水を用いるので、以下では第1及び第2撥液領域28a、28bをそれぞれ第1及び第2撥水板28a、28bとも呼ぶ。
【0045】
この場合、内側の第1撥水板28aには、露光光ILが照射されるのに対し、外側の第2撥水板28bには、露光光ILが殆ど照射されない。このことを考慮して、本実施形態では、第1撥水版28aの表面には、露光光IL(この場合、真空紫外域の光)に対する耐性が十分にある撥水コートが施された第1撥水領域が形成され、第2撥水板28bには、その表面に第1撥水領域に比べて露光光ILに対する耐性が劣る撥水コートが施された第2撥水領域が形成されている。一般にガラス板には、露光光IL(この場合、真空紫外域の光)に対する耐性が十分にある撥水コートを施し難いので、このように第1撥水板28aとその周囲の第2撥水板28bとの2つの部分に分離することは効果的である。なお、これに限らず、同一のプレートの上面に露光光ILに対する耐性が異なる2種類の撥水コートを施して、第1撥水領域、第2撥水領域を形成しても良い。また、第1及び第2撥水領域で撥水コートの種類が同一でも良い。例えば、同一のプレートに1つの撥水領域を形成するだけでも良い。
【0046】
また、図2から明らかなように、第1撥水板28aの+Y側の端部には、そのX軸方向の中央部に長方形の切り欠きが形成され、この切り欠きと第2撥水板28bとで囲まれる長方形の空間の内部(切り欠きの内部)に計測プレート30が埋め込まれている。計測プレート30の長手方向の中央(ウエハステージWSTのセンターラインLL上)には、基準マークFMが形成されるとともに、該基準マークFMのX軸方向の一側と他側に、基準マークの中心に関して対称な配置で一対の空間像計測スリットパターン(スリット状の計測用パターン)SLが形成されている。各空間像計測スリットパターンSLとしては、一例として、Y軸方向とX軸方向とに沿った辺を有するL字状のスリットパターン、あるいはX軸及びY軸方向にそれぞれ延びる2つの直線状のスリットパターンなどを用いることができる。これら空間像計測スリットパターンSL下方のウエハステージWSTの内部には、スリットパターンSLとともに空間像計測装置45(図5参照)を構成する光学系等が設けられている。
【0047】
第2撥水板28bは、実際には、図7(A)に示されるように、2枚の板状部材29a,29bが貼り合わされて形成されている。このうち、下側の板状部材29bの上面(+Z側の面)には、その4辺のそれぞれに沿って所定ピッチで回折格子RGの多数の格子線が設けられている。これについて更に詳述すると、図2に示されるように、第2撥水板28b(板状部材29b)のX軸方向一側と他側(図2における上下両側)の領域には、Yスケール39Y1,39Y2がそれぞれ形成されている。Yスケール39Y1,39Y2はそれぞれ、例えばX軸方向を長手方向とする格子線が所定ピッチでY軸に平行な方向(Y軸方向)に沿って形成される、Y軸方向を周期方向とする反射型の格子(例えば回折格子)によって構成されている。同様に、第2撥水板28bのY軸方向一側と他側(図2における左右両側)の領域には、Xスケール39X1,39X2がそれぞれ形成されている。Xスケール39X1,39X2はそれぞれ、例えばY軸方向を長手方向とする格子線が所定ピッチでX軸に平行な方向(X軸方向)に沿って形成される、X軸方向を周期方向とする反射型の格子(例えば回折格子)によって構成されている。本実施形態では、第2撥水板28bを上記のように2枚の板状部材29a,29bで構成することで、上側の板状部材29aが回折格子RGをカバーするので、回折格子RGの損傷等を防止することが可能となっている。なお、図2では、図示の便宜上から、格子のピッチは、実際のピッチに比べて格段に広く図示されている。その他の図においても同様である。
【0048】
ウエハステージWSTの−Y端面,−X端面には、それぞれ鏡面加工が施され、図2に示される反射面17a,反射面17bが形成されている。干渉計システム118(図5参照)のY軸干渉計16及びX軸干渉計126(図1では、X軸干渉計126は不図示、図2参照)は、反射面17a,17bにそれぞれ干渉計ビーム(測長ビーム)を投射して、それぞれの反射光を受光することにより、各反射面の基準位置(一般には投影ユニットPU側面に固定ミラーを配置し、そこを基準面とする)からの変位、すなわちウエハステージWSTのXY平面内の位置情報を計測し、この計測値が主制御装置20に供給される。本実施形態では、Y軸干渉計16及びX軸干渉計126として、ともに光軸を複数有する多軸干渉計が用いられている。Y軸干渉計16及びX軸干渉計126の計測値に基づいて、主制御装置20は、ウエハステージWSTのX,Y位置に加え、θx方向の回転情報(すなわちピッチング)、θy方向の回転情報(すなわちローリング)、及びθz方向の回転情報(すなわちヨーイング)も計測可能である。但し、本実施形態では、ウエハステージWSTのXY平面内の位置情報(θz方向の回転情報を含む)は、主として、上述したYスケール、Xスケールなどを用いる、後述するエンコーダシステムの各エンコーダによって計測される。そして、干渉計16,126の計測値は、各エンコーダの計測値の長期的変動(例えばスケールの経時的な変形などによる)を補正(較正)する場合などに補助的に用いられる。また、Y軸干渉計16は、ウエハ交換のため、後述するアンローディングポジション、及びローディングポジション付近においてウエハステージWSTのY位置等を計測するのに用いられる。また、例えばローディング動作とアライメント動作との間、及び/又は露光動作とアンローディング動作との間におけるウエハステージWSTの移動においても、干渉計システム118の計測情報、すなわち5自由度の方向(X軸、Y軸、θx、θy及びθz方向)の位置情報の少なくとも1つが用いられる。なお、干渉計システム118はその少なくとも一部(例えば、光学系など)が、投影ユニットPUを保持するメインフレームに設けられる、あるいは前述の如く吊り下げ支持される投影ユニットPUと一体に設けられても良いが、本実施形態では前述した計測フレームに設けられるものとする。
【0049】
なお、本実施形態では、ウエハステージWSTとして、6自由度で移動可能な単一のステージを採用したが、ウエハステージWSTとして、XY平面内で自在に移動可能なステージ本体と、該ステージ本体上に搭載され、ステージ本体に対してZ軸方向、θx方向、及びθy方向に相対的に微小駆動可能なウエハテーブルとを含む構成を採用しても良い。また、反射面17a,反射面17bの代わりに、ウエハステージWSTに平面ミラーから成る移動鏡を設けても良い。さらに、投影ユニットPUに設けられる固定ミラーの反射面を基準面としてウエハステージWSTの位置情報を計測するものとしたが、その基準面を配置する位置は投影ユニットPUに限られるものでないし、必ずしも固定ミラーを用いてウエハステージWSTの位置情報を計測しなくても良い。
【0050】
また、本実施形態では、干渉計システム118によって計測されるウエハステージWSTの位置情報が、後述の露光動作やアライメント動作などでは用いられず、主として各エンコーダのキャリブレーション動作(すなわち、計測値の較正)などに用いられるものとしたが、干渉計システム118の計測情報(すなわち、5自由度の方向の位置情報の少なくとも1つ)を、例えば露光動作及び/又はアライメント動作などで用いても良い。本実施形態では、エンコーダシステムは、少なくとも3つのエンコーダにより、ウエハステージWSTの3自由度の方向、すなわちX軸、Y軸及びθz方向の位置情報を計測する。そこで、露光動作などにおいて、干渉計システム118の計測情報のうち、エンコーダによるウエハステージWSTの位置情報の計測方向(X軸、Y軸及びθz方向)と異なる方向、例えばθx方向及び/又はθy方向に関する位置情報のみを用いても良いし、その異なる方向の位置情報に加えて、エンコーダの計測方向と同じ方向(すなわち、X軸、Y軸及びθz方向の少なくとも1つ)に関する位置情報を用いても良い。また、干渉計システム118はウエハステージWSTのZ軸方向の位置情報を計測可能としても良い。この場合、露光動作などにおいてZ軸方向の位置情報を用いても良い。
【0051】
計測ステージMSTは、各種計測用部材を有しており、6自由度方向に駆動可能とされている。計測用部材としては、例えば、図2に示されるように、投影光学系PLの像面上で照明光ILを受光するピンホール状の受光部を有する照度むらセンサ94、投影光学系PLにより投影されるパターンの空間像(投影像)を計測する空間像計測器96、及び例えば国際公開第03/065428号などに開示されているシャック−ハルトマン(Shack-Hartman)方式の波面収差計測器98などが採用されている。波面収差計測器98としては、例えば国際公開第99/60361号(対応欧州特許第1,079,223号)に開示されるものも用いることができる。
【0052】
照度むらセンサ94としては、例えば特開昭57−117238号公報(対応する米国特許第4,465,368号明細書)などに開示されるものと同様の構成のものを用いることができる。また、空間像計測器96としては、例えば特開2002−14005号公報(対応する米国特許出願公開第2002/0041377号明細書)などに開示されるものと同様の構成のものを用いることができる。なお、本実施形態では3つの計測用部材(94、96、98)を計測ステージMSTに設けるものとしたが、計測用部材の種類、及び/又は数などはこれに限られない。計測用部材として、例えば投影光学系PLの透過率を計測する透過率計測器、及び/又は、前述の局所液浸装置8、例えばノズルユニット32(あるいは先端レンズ191)などを観察する計測器などを用いても良い。さらに、計測用部材と異なる部材、例えばノズルユニット32、先端レンズ191などを清掃する清掃部材などを計測ステージMSTに搭載しても良い。
【0053】
上記各センサに加え、例えば特開平11−16816号公報(対応する米国特許出願公開第2002/0061469号明細書)などに開示される、投影光学系PLの像面上で照明光ILを受光する所定面積の受光部を有する照度モニタを採用しても良く、この照度モニタもセンターライン上に配置することが望ましい。
【0054】
なお、本実施形態では、投影光学系PLと液体(水)Lqとを介して露光光(照明光)ILによりウエハWを露光する液浸露光が行われるのに対応して、照明光ILを用いる計測に使用される上記の照度むらセンサ94(及び照度モニタ)、空間像計測器96、並びに波面収差計測器98では、投影光学系PL及び水を介して照明光ILを受光することとなる。また、各センサは、例えば光学系などの一部だけが計測ステージMSTに搭載されていても良いし、センサ全体を計測ステージMSTに配置するようにしても良い。
【0055】
また、計測ステージMSTの−Y側の側面には、直方体状の基準部材としてのコンフィデンシャルバー(以下、「CDバー」と略述する)46がX軸方向に延設されている。このCDバー46は、フルキネマティックマウント構造によって、計測ステージMST上にキネマティックに支持されている。なお、CDバー46はフィデュシャルバー(「FDバー」と略述)とも呼ばれる。
【0056】
CDバー46は、原器(計測基準)となるため、低熱膨張率の光学ガラスセラミックス、例えば、ショット社のゼロデュア(商品名)などがその素材として採用されている。このCDバー46の上面(表面)は、いわゆる基準平面板と同程度にその平坦度が高く設定されている。また、このCDバー46の長手方向の一側と他側の端部近傍には、図2に示されるように、Y軸方向を周期方向とする基準格子(例えば回折格子)52がそれぞれ形成されている。この一対の基準格子52は、所定距離を隔ててCDバー46のX軸方向の中心、すなわちセンターラインCLに関して対称な配置で形成されている。
【0057】
また、このCDバー46の上面には、図2に示されるように複数の基準マークMが形成されている。この複数の基準マークMは、同一ピッチでY軸方向に関して3行の配列で形成され、各行の配列がX軸方向に関して互いに所定距離だけずれて形成されている。各基準マークMとしては、後述するプライマリアライメント系、セカンダリアライメント系によって検出可能な寸法の2次元マークが用いられている。基準マークMはその形状(構成)が前述の基準マークFMと異なっても良いが、本実施形態では基準マークMと基準マークFMとは同一の構成であり、かつウエハWのアライメントマークとも同一の構成となっている。なお、本実施形態ではCDバー46の表面、及び計測ステージMST(前述の計測用部材を含んでも良い)の表面もそれぞれ撥液膜(撥水膜)で覆われている。
【0058】
計測ステージMSTの+Y端面、−X端面も前述したウエハステージWSTと同様の反射面19a、19bが形成されている(図2参照)。干渉計システム118(図5参照)のY軸干渉計18、X軸干渉計130(図1では、X軸干渉計130は不図示、図2参照)は、これらの反射面19a、19bに、図2に示されるように、干渉計ビーム(測長ビーム)を投射して、それぞれの反射光を受光することにより、各反射面の基準位置からの変位、すなわち計測ステージMSTの位置情報(例えば、少なくともX軸及びY軸方向の位置情報とθz方向の回転情報とを含む)を計測し、この計測値が主制御装置20に供給される。
【0059】
本実施形態の露光装置100では、図1、図2では図面の錯綜を避ける観点から図示が省略されているが、実際には、図3に示されるように、投影ユニットPUの中心を通りかつY軸と平行な直線LV上で、該中心から−Y側に所定距離隔てた位置に検出中心を有するプライマリアライメント系AL1が支持部材54に支持された状態で設けられている。また、プライマリアライメント系AL1を挟んで、X軸方向の一側と他側には、直線LVに関してほぼ対称に検出中心が配置されるセカンダリアライメント系AL21,AL22と、AL23,AL24とがそれぞれ設けられている。各セカンダリアライメント系AL2n(n=1〜4)は、回転中心Oを中心として紙面内で回動可能とされており、この回動により、X位置が調整される。なお、5つのアライメント系AL1、AL21〜AL24は、投影ユニットPUを保持するメインフレームの下面に固定される。ただし、これに限らず、5つのアライメント系AL1、AL21〜AL24を、例えば前述した計測フレームに設けても良い。
【0060】
本実施形態では、プライマリアライメント系AL1及び4つのセカンダリアライメント系AL21〜AL24のそれぞれとして、例えばウエハ上のレジストを感光させないブロードバンドな検出光束を対象マークに照射し、その対象マークからの反射光により受光面に結像された対象マークの像と不図示の指標(各アライメント系内に設けられた指標板上の指標パターン)の像とを撮像素子(CCD等)を用いて撮像し、それらの撮像信号を出力する画像処理方式のFIA(Field Image Alignment)系が用いられている。プライマリアライメント系AL1及び4つのセカンダリアライメント系AL21〜AL24のそれぞれからの撮像信号は、図5の主制御装置20に供給されるようになっている。
【0061】
次に、本実施形態の露光装置100におけるエンコーダシステム200について、図3に基づいて説明する。なお、図3においては、計測ステージMSTの図示が省略されるとともに、その計測ステージMSTと先端レンズ191との間に保持される水Lqで形成される液浸領域が符号14で示されている。
【0062】
この図3に示されるように、本実施形態の露光装置100では、前述したノズルユニット32の周囲を四方から囲む状態で、エンコーダシステムの4つのヘッドユニット62A〜62Dが配置されている。これらのヘッドユニット62A〜62Dは、図3等では図面の錯綜を避ける観点から図示が省略されているが、実際には、支持部材を介して、前述した投影ユニットPUを保持するメインフレームに吊り下げ状態で固定されている。なお、ヘッドユニット62A〜62Dは、例えば投影ユニットPUが吊り下げ支持される場合は投影ユニットPUと一体に吊り下げ支持しても良いし、あるいは前述した計測フレームに設けても良い。
【0063】
ヘッドユニット62A、62Cは、投影ユニットPUの+X側、−X側にそれぞれX軸方向を長手方向として、かつ投影光学系PLの光軸AXに関して対称に光軸AXからほぼ同一距離隔てて配置されている。また、ヘッドユニット62B、62Dは、投影ユニットPUの+Y側、−Y側にそれぞれY軸方向を長手方向として、かつ投影光学系PLの光軸AXからほぼ同一距離隔てて配置されている。
【0064】
ヘッドユニット62A及び62Cは、図3に示されるように、X軸方向に沿って投影光学系PLの光軸AXを通りかつX軸と平行な直線LH上に所定間隔で配置された複数(ここでは6個)のYヘッド64を備えている。ヘッドユニット62Aは、前述のYスケール39Y1を用いて、ウエハステージWSTのY軸方向の位置(Y位置)を計測する多眼(ここでは、6眼)のYリニアエンコーダ(以下、適宜「Yエンコーダ」又は「エンコーダ」と略述する)70A(図5参照)を構成する。同様に、ヘッドユニット62Cは、前述のYスケール39Y2を用いて、ウエハステージWSTのY位置を計測する多眼(ここでは、6眼)のYエンコーダ70C(図5参照)を構成する。ここで、ヘッドユニット62A,62Cが備える隣接するYヘッド64(すなわち、計測ビーム)の間隔は、前述のYスケール39Y1,39Y2のX軸方向の幅(より正確には、格子線の長さ)よりも狭く設定されている。また、ヘッドユニット62A,62Cがそれぞれ備える複数のYヘッド64のうち、最も内側に位置するYヘッド64は、投影光学系PLの光軸になるべく近く配置するために、投影光学系PLの鏡筒40の下端部(より正確には先端レンズ191を取り囲むノズルユニット32の横側)に固定されている。
【0065】
ヘッドユニット62A,62Cは、それぞれが備えるYヘッド64と同じX位置に、ただしY位置を+Y側に所定距離ずらして、それぞれ6個のZセンサ761〜766、741〜746(図3では不図示、図5参照)を備えている。
【0066】
Zセンサ741〜746、及びZセンサ761〜766は、図5に示されるように、不図示の処理装置を介して主制御装置20に接続されている。この処理装置を介してZセンサ72a〜72d(これらの配置については後述)も主制御装置20に接続されている。
【0067】
各Zセンサとしては、ウエハステージWSTに対し上方から光を照射し、その反射光を受光してその光の照射点におけるウエハステージWSTの上面(本実施形態では計測対象であるYスケールの計測面(計測対称面))のXY平面に直交するZ軸方向の位置情報を計測するセンサ、一例としてCDドライブ装置などで用いられる光ピックアップのような構成の光学式の変位センサ(光ピックアップ方式のセンサ)が用いられている。
【0068】
主制御装置20は、処理装置を介してZセンサ72a〜72d、Zセンサ741〜746、及びZセンサ761〜766の中から任意のZセンサを選択して作動状態とし、その作動状態としたZセンサで検出した面位置情報を受け取る。
【0069】
これを更に詳述すると、各Zセンサは、フォーカスセンサ、該フォーカスセンサを収納したセンサ本体及びセンサ本体をZ軸方向に駆動する駆動部、並びにセンサ本体のZ軸方向の変位を計測する計測部等(いずれも不図示)を備えている。
【0070】
フォーカスセンサとしては、計測ビームを計測対象面に照射し、その反射光を受光することで、計測対象面の変位を光学的に読み取る光ピックアップと同様の光学式変位センサが用いられている。フォーカスセンサの出力信号(フォーカスエラーとも呼ばれる)は、駆動部に送られる。駆動部は、フォーカスセンサからの出力信号に従って、センサ本体と計測対象面との距離を一定に保つように(より正確には、計測対象面をフォーカスセンサの光学系のベストフォーカス位置に保つように)、センサ本体をZ軸方向に駆動する。これにより、センサ本体は計測対象面のZ軸方向の変位に追従し、フォーカスロック状態が保たれる。
【0071】
計測部としては、本実施形態では、一例として回折干渉方式のエンコーダが用いられている。計測部は、センサ本体のZ軸方向の変位を読み取る。
【0072】
本実施形態では、上述のように、フォーカスロック状態では、センサ本体は、計測対象面との距離を一定に保つように、Z軸方向に変位する。従って、計測部のエンコーダヘッドが、センサ本体のZ軸方向の変位を計測することにより、計測対象面の面位置(Z位置)が計測される。計測部のエンコーダヘッドの計測値が、Zセンサの計測値として前述の処理装置を介して主制御装置20に供給される。
【0073】
ヘッドユニット62Bは、図3に示されるように、上記直線LV上にY軸方向に沿って所定間隔で配置された複数、ここでは7個のXヘッド66を備えている。また、ヘッドユニット62Dは、上記直線LV上に所定間隔で配置された複数、ここでは11個(ただし、図3ではプライマリアライメント系AL1と重なる11個のうちの3個は不図示)のXヘッド66を備えている。ヘッドユニット62Bは、前述のXスケール39X1を用いて、ウエハステージWSTのX軸方向の位置(X位置)を計測する、多眼(ここでは、7眼)のXリニアエンコーダ(以下、適宜「Xエンコーダ」又は「エンコーダ」と略述する)70B(図5参照)を構成する。また、ヘッドユニット62Dは、前述のXスケール39X2を用いて、ウエハステージWSTのX位置を計測する多眼(ここでは、11眼)のXエンコーダ70D(図5参照)を構成する。また、本実施形態では、例えば後述するアライメント時などにヘッドユニット62Dが備える11個のXヘッド66のうちの2個のXヘッド66が、Xスケール39X1,Xスケール39X2に同時にそれぞれ対向する場合がある。この場合には、Xスケール39X1と対向するXヘッド66、及びXスケール39X2と対向するXヘッド66のいずれを用いても良い。いずれにしても、ヘッドユニット62DのXスケールに対向するXヘッド66によってXリニアエンコーダ70Dが構成される。
【0074】
ここで、11個のXヘッド66のうちの一部、ここでは3個のXヘッドは、プライマリアライメント系AL1を支持する支持部材54の下方に取り付けられている。また、ヘッドユニット62B,62Dがそれぞれ備える隣接するXヘッド66(計測ビーム)の間隔は、前述のXスケール39X1,39X2のY軸方向の幅(より正確には、格子線の長さ)よりも狭く設定されている。また、ヘッドユニット62B,62Dがそれぞれ備える複数のXヘッド66のうち、最も内側に位置するXヘッド66は、投影光学系PLの光軸になるべく近く配置するために、投影光学系PLの鏡筒の下端部(より正確には先端レンズ191を取り囲むノズルユニット32の横側)に固定されている。
【0075】
さらに、セカンダリアライメント系AL21の−X側、セカンダリアライメント系AL24の+X側に、プライマリアライメント系AL1の検出中心を通るX軸に平行な直線上かつその検出中心に対してほぼ対称に検出点が配置されるYヘッド64y1,64y2がそれぞれ設けられている。Yヘッド64y1,64y2の間隔は、前述したCDバー46上の一対の基準格子52間の間隔にほぼ等しく設定されている。Yヘッド64y1,64y2は、ウエハステージWST上のウエハWの中心が上記直線LV上にある図3に示される状態では、Yスケール39Y2,39Y1にそれぞれ対向するようになっている。後述するアライメント動作の際などでは、Yヘッド64y1,64y2に対向してYスケール39Y2,39Y1がそれぞれ配置され、このYヘッド64y1,64y2(すなわち、これらYヘッド64y1,64y2によって構成されるYエンコーダ70E、70F(図5参照))によってウエハステージWSTのY位置(及びθz回転)が計測される。
【0076】
また、本実施形態では、セカンダリアライメント系の後述するベースライン計測時などに、Yヘッド64y1,64y2が、CDバー46の一対の基準格子52とそれぞれ対向し、その一対の基準格子52と対向するYヘッド64y1,64y2によって、CDバー46のY位置が、それぞれの基準格子52の位置で計測される。以下では、基準格子52にそれぞれ対向するYヘッド64y1,64y2によって構成されるエンコーダをYリニアエンコーダ70E2,70F2と呼ぶ。また、識別のため、Yスケール39Y2,39Y1に対向するYヘッド64y1,64y2によって構成されるYエンコーダを、Yエンコーダ70E1、70F1と呼ぶ。
【0077】
上述したリニアエンコーダ70A〜70Fの計測値は、主制御装置20に供給され、主制御装置20は、リニアエンコーダ70A〜70Dの計測値に基づいて、ウエハステージWSTのXY平面内の位置を制御するとともに、リニアエンコーダ70E,70Fの計測値に基づいて、CDバー46のθz方向の回転を制御する。
【0078】
また、本実施形態の露光装置100(ステージ装置50)には、図3に示されるように、スケール39X1,39X2、39Y1,39Y2、及びCDバー46上の一対の基準格子52の表面状態(例えば、異物などの存在状態)を検出するための6つの検出装置PDX1〜PDX4、PDY1,PDY2が設けられている(図3では、ハッチングが付されている)。検出装置PDX1〜PDX4、PDY1,PDY2は、投影ユニットPUを保持するメインフレーム(前述の鏡筒定盤を含む)に吊り下げ支持されても良いし、メインフレームとは別のフレーム部材に固定しても良い。
【0079】
これら6つの検出装置のうち、検出装置PDX1は投影ユニットPUの+Y側かつ−X側の位置に設けられており、検出装置PDX2は投影ユニットPUの+Y側かつ+X側の位置で、直線LVを基準として検出装置PDX1と左右対称な位置に設けられている。また、検出装置PDX3は投影ユニットPUの−Y側かつ−X側の位置に設けられており、検出装置PDX4は、直線LVを基準として検出装置PDX3と左右対称な位置に設けられている。更に、検出装置PDY1は、ヘッドユニット62Cの−Y側かつ照射系90a(これについては後述する)の+Y側に配置され、検出装置PDY2は、ヘッドユニット62Aの−Y側かつ受光系90a(これについては後述する)の+Y側の位置で、直線LVを基準として検出装置PDY1と左右対称な位置に配置されている。
【0080】
検出装置PDY1は、図4(A)に示されるように、スケール39Y2の表面に対して検出ビームを照射する照射系69Aと、スケール39Y2の表面にて散乱した検出ビームを受光する受光系69Bとを含んでいる。
【0081】
照射系69Aは、例えば、レーザ光源、コリメータレンズ、照射光調整部材、アナモルフィックプリズム、絞り等を含む送光部61と、ミラー63とを含んでいる。レーザ光源は波長が、例えば約780nmの検出ビームを射出する半導体レーザである。
【0082】
送光部61から射出された検出ビームは、ミラー63で反射され、スケール39Y2の表面に90°に近い入射角(図4では、89°)で入射する。すなわち、検出ビームはスケール39Y2の表面にほぼ平行に入射するので、図4(B)に示されるように、検出ビームは、スケール39Y2表面のX軸方向のほぼ全域にわたって延びる帯状の照射領域BAに照射される。そして、スケール39Y2の表面に、図4(A)に示されるように、異物(パーティクル)11が存在する場合、この異物11に照射された検出ビームが散乱する。
【0083】
受光系69Bは、図4(A)に示されるように、受光レンズ65及びイメージセンサ67を含んでいる。イメージセンサ67としては、例えば、一次元CCD(Charge Coupled Device)等の光電検出器が用いられる。
【0084】
受光系69Bでは、スケール39Y2表面の異物11において散乱した散乱光のうち、受光レンズ65に入射する散乱光をイメージセンサ67にて受光する。この場合、異物11のX位置に応じて、イメージセンサ67上における散乱光の受光位置が変化する。このイメージセンサ67の受光結果は、主制御装置20(図5参照)に送られる。主制御装置20は、この受光結果に基づいて異物11の位置を特定する。
【0085】
なお、検出装置PDY2も上記検出装置PDY1と同様の構成となっている。また、検出装置PDX1〜PDX4は、検出ビームの照射方向が検出装置PDY1,PDY2とは異なるものの、検出装置PDY1,PDY2と同様になっている。したがって、検出装置PDX1〜PDX4を用いることにより、スケール(39X1又は39X2)上に存在する異物11の位置を検出することが可能である。本実施形態では、異物検出時に前述のエンコーダシステムで計測されるウエハステージWSTの位置情報を用いるが、干渉計システム118で計測されるウエハステージWSTの位置情報を代用あるいは併用しても良い。
【0086】
なお、本実施形態では、検出装置からの検出ビームが、スケール39X1,39X2、39Y1,39Y2、及びCDバー46の基準格子52に照射されるため、スケール39X1,39X2、39Y1,39Y2及びCDバー46の基準格子52の回折格子における回折光が受光系69Bにて受光されるおそれがある。しかしながら、本実施形態では、回折格子の格子ピッチや向きが一定であり、受光系69Bでは、常に同一の状態の回折光が受光されるので、回折光の受光によって異物11からの散乱光の検出が影響を受けることが殆ど無い。すなわち、回折格子からの回折光の光量分だけ、受光光の光量(光強度)が底上げされるが、この底上げ分(ノイズ成分)は、位置に依存しないのに対し、異物11からの散乱光は、位置によって異なるからである。しかしながら、異物の検出信号のS/N比を向上させる観点からは、イメージセンサ67が回折光を受光しないように、受光系69Bの配置等を設計することが好ましい。
【0087】
さらに、本実施形態の露光装置100では、図3に示されるように、照射系90a及び受光系90bから成る、例えば特開平6−283403号公報(対応する米国特許第5,448,332号明細書)等に開示されるものと同様の構成の斜入射方式の多点焦点位置検出系(以下、「多点AF系」と略述する)が設けられている。本実施形態では、一例として、前述のヘッドユニット62Cの−X端部の−Y側に照射系90aが配置され、これに対峙する状態で、前述のヘッドユニット62Aの+X端部の−Y側に受光系90bが配置されている。
【0088】
多点AF系(90a,90b)の複数の検出点は、被検面上でX軸方向に沿って所定間隔で配置される。本実施形態では、例えば1行M列(Mは検出点の総数)又は2行N列(Nは検出点の総数の1/2)のマトリックス状に配置される。図3中では、それぞれ検出ビームが照射される複数の検出点を、個別に図示せず、照射系90a及び受光系90bの間でX軸方向に延びる細長い検出領域AFとして示している。この検出領域AFは、X軸方向の長さがウエハWの直径と同程度に設定されているので、ウエハWをY軸方向に1回スキャンするだけで、ウエハWのほぼ全面でZ軸方向の位置情報(面位置情報)を計測できる。また、この検出領域AFは、Y軸方向に関して、前述の液浸領域14(露光領域IA)とアライメント系(AL1、AL21,AL22,AL23,AL24)の検出領域との間に配置されているので、多点AF系とアライメント系とでその検出動作を並行して行うことが可能となっている。多点AF系は、投影ユニットPUを保持するメインフレームなどに設けても良いが、本実施形態では前述の計測フレームに設けるものとする。
【0089】
なお、複数の検出点は1行M列又は2行N列で配置されるものとしたが、行数及び/又は列数はこれに限られない。但し、行数が2以上である場合は、異なる行の間でも検出点のX軸方向の位置を異ならせることが好ましい。さらに、複数の検出点はX軸方向に沿って配置されるものとしたが、これに限らず、複数の検出点の全部又は一部をY軸方向に関して異なる位置に配置しても良い。例えば、X軸及びY軸の両方と交差する方向に沿って複数の検出点を配置しても良い。すなわち、複数の検出点は少なくともX軸方向に関して位置が異なっていれば良い。また、本実施形態では複数の検出点に検出ビームを照射するものとしたが、例えば検出領域AFの全域に検出ビームを照射しても良い。さらに、検出領域AFはX軸方向の長さがウエハWの直径と同程度でなくても良い。
【0090】
なお、図3では図示が省略されているが、多点AF系の複数の検出点のうち両端に位置する検出点の近傍、すなわち検出領域AFの両端部近傍に、前述の直線LVに関して対称な配置で、前述した各一対のZセンサ72a,72b、及び72c,72d(図5参照)が設けられている。これらの面位置センサとしては、ウエハステージWSTに対し上方から光を照射し、その反射光を受光してその光の照射点におけるウエハステージWST表面のXY平面に直交するZ軸方向の位置情報を計測するセンサ、一例としてCDドライブ装置などで用いられる光ピックアップのような構成の光学式の変位センサ(光ピックアップ方式のセンサ)が用いられている。
【0091】
図3において、符号UPはウエハステージWST上のウエハのアンロードが行われるアンローディングポジションを示し、符号LPはウエハステージWST上へのウエハのロードが行われるローディングポジションを示す。本実施形態では、アンロードポジションUPとローディングポジションLPとは、直線LVに関して対称に設定されている。なお、ウエハWの交換位置をアンロードポジションUPとローディングポジションLPとに分けて設定しているが、アンロードポジションUPとローディングポジションLPとを同一位置としても良い。
【0092】
図5には、露光装置100の制御系の主要な構成が示されている。この制御系は、装置全体を統括的に制御するマイクロコンピュータ(又はワークステーション)から成る主制御装置20を中心として構成されている。なお、図5においては、前述した照度むらセンサ94、空間像計測器96及び波面収差計測器98などの計測ステージMSTに設けられた各種センサが、纏めてセンサ群99として示されている。
【0093】
上述のようにして構成された本実施形態の露光装置100では、前述したようなウエハステージWST上のXスケール、Yスケールの配置及び前述したようなXヘッド、Yヘッドの配置を採用したことから、図6(A)及び図6(B)などに例示されるように、ウエハステージWSTの有効ストローク範囲(すなわち、本実施形態では、アライメント及び露光動作のために移動する範囲)では、必ず、Xスケール39X1,39X2とヘッドユニット62B、62D(Xヘッド66)とがそれぞれ対向し、かつYスケール39Y1,39Y2とヘッドユニット62A,62C(Yヘッド64)又はYヘッド64y1、64y2とがそれぞれ対向するようになっている。なお、図6(A)及び図6(B)中では、対応するXスケール又はYスケールに対向したヘッドが丸で囲んで示されている。
【0094】
このため、主制御装置20は、前述のウエハステージWSTの有効ストローク範囲では、エンコーダ70A〜70Dの少なくとも3つ、又はリニアエンコーダ70E1,70F1,70B及び70Dのうちの少なくとも3つの計測値に基づいて、ステージ駆動系124を構成する各モータを制御することで、ウエハステージWSTのXY平面内の位置情報(θz方向の回転情報を含む)を、高精度に制御することができる。エンコーダ70A〜70Fの計測値が受ける空気揺らぎの影響は、干渉計に比べては無視できるほど小さいので、空気揺らぎに起因する計測値の短期安定性は、干渉計に比べて格段に良い。なお、本実施形態では、ウエハステージWSTの有効ストローク範囲及びスケールのサイズ(すなわち、回折格子の形成範囲)などに応じて、ヘッドユニット62B、62D、62A、62Cのサイズ(例えば、ヘッドの数及び/又は間隔など)を設定している。従って、ウエハステージWSTの有効ストローク範囲では、4つのスケール39X1,39X2、39Y1,39Y2が全てヘッドユニット62B、62D、62A、62Cとそれぞれ対向するが、4つのスケールが全て対応するヘッドユニットと対向しなくても良い。例えば、Xスケール39X1,39X2の一方、及び/又はYスケール39Y1,39Y2の一方がヘッドユニットから外れても良い。Xスケール39X1,39X2の一方、又はYスケール39Y1,39Y2の一方がヘッドユニットから外れる場合、ウエハステージWSTの有効ストローク範囲では3つのスケールがヘッドユニットと対向するので、ウエハステージWSTのX軸、Y軸及びθz方向の位置情報を常時計測可能である。また、Xスケール39X1,39X2の一方、及びYスケール39Y1,39Y2の一方がヘッドユニットから外れる場合、ウエハステージWSTの有効ストローク範囲では2つのスケールがヘッドユニットと対向するので、ウエハステージWSTのθz方向の位置情報は常時計測できないが、X軸及びY軸方向の位置情報は常時計測可能である。この場合、干渉計システム118によって計測されるウエハステージWSTのθz方向の位置情報を併用して、ウエハステージWSTの位置制御を行っても良い。
【0095】
また、図6(A)中に白抜き矢印で示されるようにウエハステージWSTをX軸方向に駆動する際、そのウエハステージWSTのY軸方向の位置を計測するYヘッド64が、同図中に矢印e1,e2で示されるように、隣のYヘッド64に順次切り換わる。例えば、実線の丸で囲まれるYヘッド64から点線の丸で囲まれるYヘッド64へ切り換わる。このため、その切り換わりの前後で、計測値が引き継がれる。すなわち、本実施形態では、このYヘッド64の切り換え及び計測値の引継ぎを円滑に行うために、前述の如く、ヘッドユニット62A,62Cが備える隣接するYヘッド64の間隔を、Yスケール39Y1,39Y2のX軸方向の幅よりも狭く設定したものである。
【0096】
また、図示は省略されているが、上記のYヘッドと同様に、ヘッドユニット62A,62Cがそれぞれ備える、隣接するZセンサ76同士、74同士の切り換え(つなぎ処理)が行われる。
【0097】
また、本実施形態では、前述の如く、ヘッドユニット62B,62Dが備える隣接するXヘッド66の間隔は、前述のXスケール39X1,39X2のY軸方向の幅よりも狭く設定されているので、上述と同様に、図6(B)中に白抜き矢印で示されるようにウエハステージWSTをY軸方向に駆動する際、そのウエハステージWSTのX軸方向の位置を計測するXヘッド66が、順次隣のXヘッド66に切り換わり(例えば実線の丸で囲まれるXヘッド66から点線の丸で囲まれるXヘッド66へ切り換わる)、その切り換わりの前後で計測値が引き継がれる。
【0098】
ここで、エンコーダ70A〜70Fの構成等について、図7(A)に拡大して示されるYエンコーダ70Aを代表的に採り上げて説明する。この図7(A)では、Yスケール39Y1に検出光(計測ビーム)を照射するヘッドユニット62Aの1つのYヘッド64を示している。
【0099】
Yヘッド64は、大別すると、照射系64a、光学系64b、及び受光系64cの3部分から構成されている。
【0100】
照射系64aは、レーザ光LBをY軸及びZ軸に対して45°を成す方向に射出する光源、例えば半導体レーザLDと、該半導体レーザLDから射出されるレーザビームLBの光路上に配置されたレンズL1とを含む。
【0101】
光学系64bは、その分離面がXZ平面と平行である偏光ビームスプリッタPBS、一対の反射ミラーR1a,R1b、レンズL2a,L2b、四分の一波長板(以下、λ/4板と記述する)WP1a,WP1b、及び反射ミラーR2a,R2b等を備えている。
【0102】
前記受光系64cは、偏光子(検光子)及び光検出器等を含む。
【0103】
このYエンコーダ70Aにおいて、半導体レーザLDから射出されたレーザビームLBはレンズL1を介して偏光ビームスプリッタPBSに入射し、偏光分離されて2つのビームLB1、LB2となる。偏光ビームスプリッタPBSを透過したビームLB1は反射ミラーR1aを介してYスケール39Y1に形成された反射型回折格子RGに到達し、偏光ビームスプリッタPBSで反射されたビームLB2は反射ミラーR1bを介して反射型回折格子RGに到達する。なお、ここで「偏光分離」とは、入射ビームをP偏光成分とS偏光成分に分離することを意味する。
【0104】
ビームLB1、LB2の照射によって回折格子RGから発生する所定次数の回折ビーム、例えば1次回折ビームはそれぞれ、レンズL2b、L2aを介してλ/4板WP1b、WP1aにより円偏光に変換された後、反射ミラーR2b、R2aにより反射されて再度λ/4板WP1b、WP1aを通り、往路と同じ光路を逆方向に辿って偏光ビームスプリッタPBSに達する。
【0105】
偏光ビームスプリッタPBSに達した2つのビームは、各々その偏光方向が元の方向に対して90度回転している。このため、先に偏光ビームスプリッタPBSを透過したビームLB1の1次回折ビームは、偏光ビームスプリッタPBSで反射されて受光系64cに入射するとともに、先に偏光ビームスプリッタPBSで反射されたビームLB2の1次回折ビームは、偏光ビームスプリッタPBSを透過してビームLB1の1次回折ビームと同軸に合成されて受光系64cに入射する。
【0106】
そして、上記2つの1次回折ビームは、受光系64cの内部で、検光子によって偏光方向が揃えられ、相互に干渉して干渉光となり、この干渉光が光検出器によって検出され、干渉光の強度に応じた電気信号に変換される。
【0107】
上記の説明からわかるように、Yエンコーダ70Aでは、干渉させる2つのビームの光路長が極短くかつほぼ等しいため、空気揺らぎの影響がほとんど無視できる。そして、Yスケール39Y1(すなわちウエハステージWST)が計測方向(この場合、Y軸方向)に移動すると、2つのビームそれぞれの位相が変化して干渉光の強度が変化する。この干渉光の強度の変化が、受光系64cによって検出され、その強度変化に応じた位置情報がYエンコーダ70Aの計測値として出力される。その他のエンコーダ70B,70C,70D等も、エンコーダ70Aと同様にして構成されている。各エンコーダとしては、分解能が、例えば0.1nm程度のものが用いられている。なお、本実施形態のエンコーダでは、図7(B)に示されるように、検出光として格子線から成る回折格子RGの周期方向に長く延びる断面形状のレーザビームLBを用いても良い。図7(B)では、回折格子RGの格子線と比較してビームLBを誇張して大きく図示している。
【0108】
次に、本実施形態の露光装置100における、ウエハステージWSTと計測ステージMSTとを用いた並行処理動作について、図8〜図21に基づいて説明する。なお、以下の動作中、主制御装置20によって、局所液浸装置8の液体供給装置5及び液体回収装置6の各バルブの開閉制御が前述したようにして行われ、投影光学系PLの先端レンズ191の射出面側には常時水が満たされている。しかし、以下では、説明を分かり易くするため、液体供給装置5及び液体回収装置6の制御に関する説明は省略する。また、以後の動作説明は、多数の図面を用いて行うが、図面毎に同一の部材に符号が付されていたり、付されていなかったりしている。すなわち、図面毎に、記載している符号が異なっているが、それら図面は符号の有無に関わらず、同一構成である。これまでに説明に用いた、各図面についても同様である。
【0109】
なお、前提として、プライマリアライメント系AL1のベースライン計測(ベースラインチェック)や、セカンダリアライメント系AL2n(n=1〜4)のベースライン計測動作は、既に行われているものとする。ここで、プライマリアライメント系AL1のベースラインとは、投影光学系PLによるパターン(例えばレチクルRのパターン)の投影位置とプライマリアライメント系AL1の検出中心との位置関係(又は距離)を意味し、セカンダリアライメント系AL2nのベースラインとは、プライマリアライメント系AL1(の検出中心)を基準とする各セカンダリアライメント系AL2n(の検出中心)の相対位置を意味する。プライマリアライメント系AL1のベースラインは、例えば、基準マークFMがプライマリアライメント系AL1の視野(検出領域)内に位置決めされた状態で、基準マークFMを計測するとともに、基準マークFMが投影光学系PLの露光領域IA(液浸領域14)内に位置決めされた状態で、例えば、特開2002−14005号公報(対応する米国特許出願公開第2002/0041377号明細書)などに開示される方法と同様に、一対の空間像計測スリットパターンSLを用いたスリットスキャン方式の空間像計測動作にて、一対の計測マークの空間像をそれぞれ計測し、それぞれの検出結果及び計測結果に基づいて算出する。また、セカンダリアライメント系AL2nのベースラインは、例えば、事前に、ロット先頭のウエハW(プロセスウエハ)上の特定のアライメントマークをプライマリアライメント系AL1、セカンダリアライメント系AL21〜AL24それぞれで検出し、その検出結果とその検出時のエンコーダ70A〜70Dの計測値とから算出する。なお、主制御装置20は、セカンダリアライメント系AL21〜AL24のX軸方向の位置を、アライメントショット領域の配置に合わせて事前に調整している。
【0110】
図8には、ウエハステージWST上のウエハW(ここでは、一例として、あるロット(1ロットは25枚又は50枚)の中間のウエハとする)に対するステップ・アンド・スキャン方式の露光が行われている状態が示されている。この露光中、主制御装置20により、Xスケール39X1,39X2にそれぞれ対向する図8中に丸で囲んで示されている2つのXヘッド66(Xエンコーダ70B,70D)と、Yスケール39Y1,39Y2にそれぞれ対向する図8中に丸で囲んで示されている2つのYヘッド64(Yエンコーダ70A,70C)とのうちの少なくとも3つの計測値に基づいて、ウエハステージWSTのXY平面内の位置(θz回転を含む)が制御されている。また、ウエハステージWSTのZ軸方向の位置とθy回転(ローリング)及びθx回転(ピッチング)とは、ヘッドユニット62A,62C内部に設けられた前述のZセンサ74i,76j(i,jは、1〜6のいずれか)の計測値に基づいて制御され、θx回転(ピッチング)はY軸干渉計16の計測値に基づいて制御されている。
【0111】
なお、Zセンサをヘッドユニット62A,62Cの内部又はその近傍にY軸方向にも並べて配置し、ウエハステージWSTのZ軸方向の位置とθy回転(ローリング)とθx回転(ピッチング)とを、複数のZセンサの計測値に基づいて制御しても良い。いずれにしても、この露光中のウエハステージWSTのZ軸方向の位置、θy回転及びθx回転の制御(ウエハWのフォーカス・レベリング制御)は、事前に行われたフォーカスマッピング(これについては後述する)の結果に基づいて行われる。
【0112】
上記の露光動作は、主制御装置20により、事前に行われたウエハアライメント、例えばエンハンスト・グローバル・アライメント(EGA)の結果(これについては後述する)及びアライメント系AL1,AL21〜AL24の最新のベースライン等に基づいて、ウエハW上の各ショット領域の露光のための走査開始位置(加速開始位置)へウエハステージWSTが移動されるショット間移動動作と、レチクルRに形成されたパターンを走査露光方式で各ショット領域に転写する走査露光動作とを繰り返すことにより、行われる。なお、上記の露光動作は、先端レンズ191とウエハWとの間に水を保持した状態で行われる。また、図8における−Y側に位置するショット領域から+Y側に位置するショット領域の順で行われる。さらにEGA方式は、例えば特開昭61−44429号公報(対応する米国特許第4,780,617号明細書)に開示されているように、ウエハW上の複数のショット領域の一部(例えば、8〜16個程度)をアライメントショット領域として選択し、この選択されたショット領域のアライメントマークをアライメント系AL1、AL21〜AL24によって検出する。そして、この検出されたアライメントマークの位置情報を統計演算してウエハW上の各ショット領域の位置情報(配列座標)を算出するものである。このEGA方式では、ショット領域の位置情報だけでなく、ウエハWのスケーリング、ローテーションなどに関する情報も求めることができる。
【0113】
そして、図9に示されるように、ウエハWに対する露光が終了する前(最終のショット領域が露光される前)に、主制御装置20は、X軸干渉計130の計測値を一定値に維持しつつY軸干渉計18の計測値に基づいてステージ駆動系124を制御して、計測ステージMSTを図10に示される位置まで移動させる。このとき、CDバー46の−Y側の端面とウエハステージWSTの+Y側の端面とは接触している。なお、例えば各ステージのY軸方向の位置を計測する干渉計又はエンコーダの計測値をモニタして計測ステージMSTとウエハステージWSTとをY軸方向に300μm程度離間させて、非接触の状態(近接状態)を保っても良い。
【0114】
次いで、図11に示されるように、主制御装置20は、ウエハステージWSTと計測ステージMSTとのY軸方向の位置関係を保ちつつ、計測ステージMSTを−Y方向に駆動する動作を開始するとともに、ウエハステージWSTをアンローディングポジションUPに向けて駆動する動作を開始する。この動作が開始されると、本実施形態では計測ステージMSTが−Y方向のみに移動され、ウエハステージWSTが−Y方向及び−X方向に移動される。
【0115】
このようにして、主制御装置20により、ウエハステージWST、計測ステージMSTが同時に駆動されると、投影ユニットPUの先端レンズ191とウエハWとの間に保持されていた水(液浸領域14の水)が、ウエハステージWST及び計測ステージMSTの−Y側への移動に伴って、ウエハW→プレート28→CDバー46→計測ステージMSTの順に移動する。なお、上記の移動中、ウエハステージWST、計測ステージMSTは前述の接触状態(又は近接状態)を保っている。なお、図11には、液浸領域14の水がプレート28からCDバー46に渡される直前の状態が示されている。
【0116】
図11の状態から、更にウエハステージWST及び計測ステージMSTが−Y方向へ同時に僅かに駆動されると、Yエンコーダ70A,70CによるウエハステージWSTの位置計測ができなくなるので、この直前に、主制御装置20は、ウエハステージWSTのY位置及びθz回転の制御を、Yエンコーダ70A,70Cの計測値に基づく制御から、Y軸干渉計16の計測値に基づく制御に切り換える。そして、所定時間後、図12に示されるように、計測ステージMSTのCDバー46がアライメント系AL1,AL21〜AL24の直下に位置するため、主制御装置20は、計測ステージMSTをこの位置で停止するとともに、Xスケール39X1に対向する図12中に丸で囲んで示されるXヘッド66(Xリニアエンコーダ70B)によりウエハステージWSTのX位置を計測しかつY位置及びθz回転等はY軸干渉計16により計測しつつ、ウエハステージWSTをさらにアンローディングポジションUPに向かって駆動し、アンローディングポジションUPで停止させる。なお、図12の状態では、計測ステージMSTと先端レンズ191との間に水が保持されている。
【0117】
次いで、主制御装置20は、図12及び図13に示されるように、CDバー46の基準マークMを用いて、セカンダリアライメント系AL2n(の検出中心)の、プライマリアライメント系AL1(の検出中心)を基準とする相対位置関係(ベースライン)を計測する。この場合のベースライン計測は、ウエハ交換毎というインターバルで行われるので、以下では「Sec-BCHK(インターバル)」とも記述する。
【0118】
このSec-BCHK(インターバル)では、主制御装置20は、CDバー46上の一対の基準格子52とそれぞれと対向するYヘッド64y1,64y2(Yリニアエンコーダ70E2,70F2)の計測値に基づいて、CDバー46のθz回転を調整するとともに、計測ステージMSTのセンターラインCL上又はその近傍に位置する基準マークMを検出するプライマリアライメント系AL1の計測値に基づいて、例えば干渉計の計測値を用いてCDバー46のXY位置を調整する。
【0119】
そして、この状態で、主制御装置20は、4つのセカンダリアライメント系AL21〜AL24を用いて、それぞれのセカンダリアライメント系の視野内にあるCDバー46上の基準マークMを同時に計測することで、4つのセカンダリアライメント系AL21〜AL24のベースラインをそれぞれ求める。そして、その後の処理に際しては、新たに計測したベースラインを用いることで、4つのセカンダリアライメント系AL21〜AL24のベースラインのドリフトが補正される。
【0120】
また、このSec-BCHK(インターバル)と並行して、主制御装置20は、アンロードポジションUPに停止しているウエハステージWST上のウエハWを、不図示のアンロードアームの駆動系に指令を与えてアンロードさせ、ウエハステージWSTを+X方向に駆動してローディングポジションLPに移動させる。
【0121】
次に、主制御装置20は、図14に示されるように、計測ステージMSTを、ウエハステージWSTから離れた状態からウエハステージWSTとの前述の接触状態(又は近接状態)に移行させるための最適な待機位置(以下、「最適スクラム待機位置」と呼ぶ)へ移動させる。これと並行して、主制御装置20は、不図示のロードアームの駆動系に指令を与えて、ウエハステージWST上に新たなウエハWをロードさせる。なお、図14には、ウエハWがウエハステージWST上にロードされた状態が示されている。
【0122】
本実施形態において、上述の計測ステージMSTの最適スクラム待機位置は、ウエハ上のアライメントショット領域に付設されたアライメントマークのY座標に応じて適切に設定される。これにより、上記の接触状態(又は近接状態)への移行の際に、計測ステージMSTをその最適スクラム待機位置に移動させる動作が不要になるので、最適スクラム待機位置から離れた位置に待機させる場合に比べて、計測ステージMSTの移動回数を1回削減できる。また、本実施形態では、上記の最適スクラム待機位置としては、ウエハステージWSTが前述のウエハアライメントのために停止する位置で、上記の接触状態(又は近接状態)に移行できるように、最適スクラム待機位置が定められる。
【0123】
次に、主制御装置20は、ウエハステージWSTを、図15に示される位置へ移動させる。この移動の途中で、主制御装置20は、ウエハステージWSTのXY平面内の位置の制御を、X軸方向についてはエンコーダ70Bの計測値,Y軸方向及びθz回転についてはY軸干渉計16の計測値に基づく制御から、Xスケール39X1,39X2に対向する図15中に丸で囲んで示される2つのXヘッド66のいずれか(エンコーダ70D)と、Yスケール39Y1,39Y2に対向する図15中に丸で囲んで示される2つのYヘッド64y2,64y1(エンコーダ70F1,70E1)との3つの計測値に基づく制御に切り換える。
【0124】
次に、主制御装置20は、上述の3つのエンコーダの計測値に基づいて、ウエハステージWSTの位置を管理しつつ、ウエハステージWSTの+Y方向への移動を開始する。そして、ウエハステージWSTが図16に示される位置に到達すると、主制御装置20は、ウエハステージWSTと計測ステージMSTとを接触させ(又は300μm程度の距離に近接する)、直ちにウエハステージWSTを停止する。
【0125】
ウエハステージWSTの停止後、主制御装置20は、プライマリアライメント系AL1,セカンダリアライメント系AL22,AL23を用いて、3つのショット領域(以下、「ファーストアライメントショット領域」と呼ぶ)に付設されたアライメントマークをほぼ同時にかつ個別に検出し(図16中の星マーク参照)、上記3つのアライメント系AL1,AL22,AL23の検出結果とその検出時の上記3つのエンコーダの計測値とを関連付けて不図示のメモリに格納する。なお、この場合の3つのファーストアライメントショット領域に付設されたアライメントマークの同時検出は、ウエハステージWSTのZ位置を変化させることで、複数のアライメント系AL1,AL21〜AL24とウエハステージWSTに載置されているウエハWとの間の、Z軸方向(フォーカス方向)における相対位置関係を変更しつつ行われている。
【0126】
上述のように本実施形態では、ファーストアライメントショット領域のアライメントマークの検出を行う位置で、計測ステージMSTとウエハステージWSTとの接触状態(又は近接状態)への移行が完了し、その位置から、主制御装置20によって、その接触状態(又は近接状態)での両ステージWST,MSTの+Y方向への移動が開始される。この両ステージWST,MSTの+Y方向への移動開始に先立って、主制御装置20は、図16に示されるように、多点AF系(90a,90b)の検出ビームのウエハステージWSTへの照射を開始する。これにより、ウエハステージWST上に多点AF系の検出領域が形成される。
【0127】
このとき、液浸領域14は、CDバー46とウエハステージWSTとの境界付近に形成されている。すなわち、液浸領域14の水がCDバー46からウエハステージWSTに渡される直前の状態となっている。
【0128】
そして、両ステージWST,MSTが接触状態(又は近接状態)を保ったまま+Y方向へ更に移動し、図17に示される位置に到達すると、主制御装置20は、図17中でアライメント系AL1,AL21〜AL24それぞれと対向する位置に存在する5つのショット領域(以下、「セカンドアライメントショット領域」)に付設されたアライメントマークを、5つのアライメント系AL1,AL21〜AL24を用いて、ほぼ同時にかつ個別に検出し(図17中の星マーク参照)、上記5つのアライメント系AL1,AL21〜AL24の検出結果とその検出時の上記3つのエンコーダの計測値とを関連付けて不図示のメモリに格納する。なお、この場合の5つのセカンドアライメントショット領域に付設されたアライメントマークの同時検出も、ファーストアライメントショット領域の検出と同様、ウエハステージWSTのZ位置を変化させながら行われる。
【0129】
また、このとき、Xスケール39X1に対向し、かつ上記直線LV上に位置するXヘッドが存在しないので、主制御装置20は、Xスケール39X2に対向するXヘッド66(Xリニアエンコーダ70D)及びYリニアエンコーダ70E1,70F1の計測値に基づいて、ウエハステージWSTのXY平面内の位置を制御している。
【0130】
上述したように、本実施形態では、セカンドアライメントショット領域のアライメントマークの検出が終了した時点で、合計8個のアライメントマークの位置情報(2次元位置情報)が検出できる。そこで、この段階で、主制御装置20は、これらの位置情報を用いて例えば前述のEGA方式にて統計演算を行って、ウエハWのスケーリング(ショット倍率)を求め、その算出したショット倍率に基づいて、投影光学系PLの光学特性、例えば投影倍率を調整しても良い。本実施形態では、投影光学系PLを構成する特定の可動レンズを駆動する、あるいは投影光学系PLを構成する特定レンズ間に形成された気密室内部の気体の圧力を変更するなどして、投影光学系PLの光学特性を調整する調整装置68(図5参照)を制御して投影光学系PLの光学特性を調整する。すなわち、主制御装置20は、アライメント系AL1,AL21〜AL24がウエハW上の所定数(ここでは8個)のマークを検出し終えた段階で、それらの検出結果に基づいて、投影光学系PLの光学特性を調整させるように調整装置68を制御することとしても良い。なお、マークの個数は8個、あるいは検出対象のマークの総数の半分などに限られるものでなく、例えばウエハのスケーリングなどの算出に必要な個数以上であれば良い。
【0131】
次いで、主制御装置20は、上記の5つのセカンドアライメントショット領域に付設されたアライメントマークの同時検出の終了後、接触状態(又は近接状態)での両ステージWST,MSTの+Y方向への移動を再び開始すると同時に、多点AF系(90a,90b)を用いたフォーカスマッピング(ウエハW表面のZ軸方向に関する位置情報(面位置情報)の検出)を開始する。
【0132】
このフォーカスマッピングに際して、主制御装置20は、Xスケール39X2に対向するXヘッド66(Xリニアエンコーダ70D)と、Yスケール39Y1,Y2にそれぞれ対向する2つのYヘッド64y2,64y1(Yリニアエンコーダ70F1,70E1)とに基づいてウエハステージWSTのXY平面内の位置を管理している。そして、主制御装置20は、多点AF系(90a,90b)と面位置センサを共に作動させた状態で、ウエハステージWSTが+Y方向へ進行している間に、所定のサンプリング間隔で、面位置センサで計測されるウエハステージWST表面(プレート28の表面)のZ軸方向に関する位置情報(面位置情報)と、多点AF系(90a,90b)で検出される複数の検出点におけるウエハW表面のZ軸方向に関する位置情報(面位置情報)とを取り込み、その取り込んだ2種類の面位置情報と各サンプリング時のYリニアエンコーダ70F1,70E1の計測値との三者を相互に対応付けて不図示のメモリに逐次格納する。
【0133】
上記の接触状態(又は近接状態)での両ステージWST,MSTの+Y方向への移動により、ウエハステージWSTが、図18に示される位置に達すると、主制御装置20は、ウエハステージWSTをその位置で停止させるとともに、計測ステージMSTについては、そのまま+Y方向への移動を続行させる。なお、計測ステージMSTは、ウエハステージWST側で露光が開始されるまで待機する露光開始待機位置に達した段階で、その位置にて計測ステージMSTを停止させる。そして、主制御装置20は、図18中でアライメント系AL1,AL21〜AL24と対向する位置に存在する5つのショット領域(以下、「サードアライメントショット領域」と呼ぶ)に付設されたアライメントマークを、5つのアライメント系AL1,AL21〜AL24を用いてほぼ同時にかつ個別に検出し(図18中の星マーク参照)、上記5つのアライメント系AL1,AL21〜AL24の検出結果とその検出時の上記3つのエンコーダ70D、70F1、70E1の計測値とを関連付けて不図示のメモリに格納する。なお、この場合の5つのサードアライメントショット領域に付設されたアライメントマークの同時検出も、前述した如く、ウエハステージWSTのZ位置を変化させながら行われる。
【0134】
次に、主制御装置20は、ウエハステージWSTの+Y方向への移動を開始する。そして、ウエハステージWSTが図19に示される位置に到達すると、主制御装置20は、直ちにウエハステージWSTを停止させ、図19の状態でプライマリアライメント系AL1,セカンダリアライメント系AL22,AL23それぞれと対向する3つのショット領域(以下、「フォースアライメントショット領域」と呼ぶ)に付設されたアライメントマークをほぼ同時にかつ個別に検出し(図19中の星マーク参照)、上記3つのアライメント系AL1,AL22,AL23の検出結果とその検出時の上記3つのエンコーダの計測値とを関連付けて不図示のメモリに格納する。なお、この場合の3つのフォースアライメントショット領域に付設されたアライメントマークの同時検出も、前述した如く、ウエハステージWSTのZ位置を変化させながら行われる。このとき、フォーカスマッピングは続行されている。一方、計測ステージMSTは、上記露光開始待機位置で待機したままである。そして、主制御装置20は、このようにして得た合計16個のアライメントマークの検出結果と対応する4つのエンコーダの計測値とを用いて、例えば前述のEGA方式にて統計演算を行って、上記4つのエンコーダの計測軸で規定されるXY座標系上におけるウエハW上の全てのショット領域の配列情報(座標値)を算出する。
【0135】
次いで、主制御装置20は、ウエハステージWSTを再度+Y方向へ移動させながら、フォーカスマッピングを続行する。そして、多点AF系(90a,90b)からの検出ビームがウエハW表面から外れると、図20に示されるように、フォーカスマッピングを終了する。この時点で、主制御装置20は、多点AF系(90a,90b)の各検出点についての面位置情報を、同時に取り込んだ面位置センサによる面位置情報を基準とするデータに換算する。その後、主制御装置20は、前述のウエハアライメント(EGA)の結果及び最新の5つのアライメント系AL1,AL21〜AL24のベースライン等に基づいて、ステップ・アンド・スキャン方式の露光を、液浸露光にて行い、ウエハW上の複数のショット領域にレチクルパターンを順次転写する。この状態が、図21に示されている。以降、ロット内の残りのウエハに対して同様の動作が繰り返し行われる。
【0136】
ここで、上記露光動作中においては、ウエハWのほぼ全面に対して露光を行うため、図21や図9などから分かるように、検出装置PDY1の照射系69Aからの検出ビームが、スケール39Y2のY軸方向全域に対して、少なくとも1度は照射されるようになっている。したがって、主制御装置20は、検出装置PDY1を構成するイメージセンサ67において、散乱光が受光された場合には、スケール39Y2上に異物が存在するものと判断し、その検出時点のエンコーダ70Cの計測結果により、異物のY軸方向位置(座標)を検出する。また、主制御装置20は、イメージセンサ67による検出結果及びエンコーダ70B又は70Dの計測結果に基づいて、異物のスケール39Y2上における位置(座標)を検出する。
【0137】
また、検出装置PDY2の検出ビームに関しても、検出装置PDY1と同様、露光動作中に、スケール39Y1のY軸方向全域に対して、少なくとも1度は照射されるので、主制御装置20は、検出装置PDY2を構成するイメージセンサ67において、散乱光が受光された場合には、スケール39Y1上に異物が存在するものと判断し、その検出時点のエンコーダ70Aの計測結果により、異物の位置(座標)を検出する。また、主制御装置20は、検出装置PDY2の検出結果とエンコーダ70B又は70Dの計測結果に基づいて、異物が存在するか否かの判断、及び異物のスケール39Y1上における位置(座標)の検出を実行する。
【0138】
また、上記露光動作中には、図21に代表的に示されるように、検出装置PDX1又はPDX2と、スケール39X1とが対向するようになっており、また、露光動作中、スケール39X1の表面全域に対して少なくとも一度は、検出装置PDX1又はPDX2の検出ビームが照射されるようになっている。したがって、主制御装置20は、エンコーダ70B、及び70A又は70C、並びに検出装置PDX1,PDX2を用いて、上述と同様にして異物が存在するか否かの判断、及び異物のスケール39X1上における位置(座標)の検出を実行する。
【0139】
更に、図12〜図14に示されるように、ウエハステージWSTがアンローディングポジションUPからローディングポジションLPに移動する間には、検出装置PDX3又はPDX4とスケール39X2とが対向し、スケール39X2の表面全域に対して少なくとも一度は、検出装置PDX3の検出ビーム及び検出装置PDX4の検出ビームのいずれかが照射されるため、主制御装置20は、これら検出装置PDX3又はPDX4、及びエンコーダ70D、並びにY軸干渉計16を用いて、異物が存在するか否かの判断、及び異物のスケール39X2上における位置(座標)の検出を実行する。
【0140】
また、図9や図18に示されるように、計測ステージMST上に液浸領域14が存在せず、計測ステージMSTが自由に移動できる場合には、主制御装置20が、CDバー46上の基準格子52が検出装置PDX1又はPDX2に対向する位置まで計測ステージMSTを移動し、検出装置PDX1又はPDX2を用いて、基準格子52上に異物が存在するか否かの判断、及び異物の基準格子52上における位置(座標)の検出を実行する。
【0141】
なお、上述した場合に限らず、例えば、図15〜図19に示されるように、アライメント系AL1、AL21〜AL24を用いたアライメント動作及びこれに伴う移動動作を行っている間にも、検出装置PDY1(PDY2)の検出ビームがスケール39Y2(39Y1)の全域に照射されることから、この間に、検出装置PDY1(PDY2)を用いて、スケール39Y2(39Y1)上面の異物の検出(検査)を行うこととしても良い。すなわち、異物検出動作はその少なくとも一部が露光動作とは異なる他の動作と並行して実行されても良い。なお、異物検出動作はその少なくとも一部が単独で実行されても良い。この場合、異物の検出装置は図3と異なる配置、及び/又は数としても良い。
【0142】
本実施形態において、上記異物の検出(検査)の結果、スケール表面に異物が存在すると判断された場合には、主制御装置20は、異物検出結果に基づいて、スケールの洗浄(又は交換)を行うか、あるいは露光動作(アライメント動作なども含む)を続行するかを、例えば動作状況などに応じて判断し、露光動作(アライメント動作なども含む)を続行する場合には、その動作中に、異物と対向するヘッドを使わないように、異物を避けてヘッドを選択する。例えば、4つのヘッドユニットのうち、異物と対向しない3つのヘッドユニットのヘッドを選択する、あるいは、各ヘッドユニット内で、ヘッドの切替タイミングを変えるなどして、異物と対向しないヘッドを使う。すなわち、異物検出結果に基づいて、スケール上で異物が存在する領域を、エンコーダシステム200による計測が不能あるいは計測値が異常となる非計測領域として特定する。さらに、エンコーダシステム200によるウエハステージWSTの位置計測が行われる動作、例えば露光動作では、ウエハステージWSTの位置に応じて非計測領域と対向しない3つのエンコーダヘッドを選択しながら、その選択される3つのエンコーダヘッドを用いてウエハステージWSTの位置を制御する。そして、例えば、その段階においてウエハステージWST上に載置されているウエハWに対する露光が終了した段階で、スケールの異物が存在する部分が、投影ユニットPU直下に位置するように、ステージ駆動系124を介してウエハステージWSTを移動する。すなわち、異物を含むスケールの一部が液浸領域14内に移動する。局所液浸装置8は、液体Lqの供給と回収とを並行して行っているので、液浸領域14内に移動した異物は液体Lqと一緒に回収される。これにより、スケール上の異物が除去される(洗浄される)。
【0143】
そして、上記の異物除去が終了した段階で、主制御装置20は、ウエハステージWSTを元の位置まで戻し、それまで行われた動作の続きを実行する。ここでは、ウエハWの露光、及び異物の除去が完了しているので、ウエハステージWSTをアンロードポジションUPまで移動してウエハの交換を行い、露光シーケンスを続行する。なお、ウエハWの露光終了直後に異物除去を行うものとしたが、例えば、露光シーケンスが終了した時点で異物除去シーケンスを実行する、すなわち異物除去動作を開始しても良い。また、異物検出結果から特定されるスケールの非計測領域は、異物が存在する領域のみでも良いが、異物よりも大きな領域としても良い。
【0144】
一方、異物検出結果に基づいて、スケールの洗浄(又は交換)を行うと判断された場合には、主制御装置20は、直ちに露光動作を中止し、必要な処理を行う。なお、露光動作を直ちに中止しないで、ウエハWの露光が終了した段階で必要な処理を開始しても良い。また、露光動作に先立って異物検出動作が行われる場合、異物検出結果に基づいて露光動作を実行可能か否か判断しても良い。一例として、スケール上に異物が存在しない、異物が存在してもエンコーダシステムによる計測が可能ある、あるいは異物(非計測領域)を避けて3つのヘッドを選択可能である場合は、露光動作を実行可能と判断する。一方、異物によるエンコーダシステムの計測不良によってウエハステージWSTの制御精度(又はレチクルパターンに対するウエハのアライメント精度)が許容値を超える場合は、露光動作を実行不能と判断して必要な処理(スケールの洗浄又は交換など)を実行する。
【0145】
以上説明したように、本実施形態によると、ウエハステージWSTの位置を計測するために用いられるスケール39X1,39X2,39Y1,39Y2に対して検出装置PDX1〜PDX4,PDY1,PDY2の照射系69Aからの検出ビームを照射し、スケール39X1,39X2,39Y1,39Y2を介した(スケール39X1,39X2,39Y1,39Y2上で散乱した)検出ビームを受光系69Bで検出することにより、スケールの表面状態(異物の存在状態)を検出するので、スケールに対して非接触で表面状態の検出を行うことが可能である。
【0146】
また、本実施形態によると、検出装置により、スケールの表面状態(異物の存在状態)を検出することができるため、該表面状態を考慮して、スケールを用いたウエハステージWSTの位置計測を行うことにより、高精度なウエハステージWSTの位置制御を行うことが可能である。特に本実施形態では、検出装置の検出の結果、異物が発見された場合には、その異物を除去した後に、露光動作を行うこととしているので、異物の影響を受けることなく高精度なウエハステージWSTの位置制御を行うことが可能である。
【0147】
また、上記のように高精度なウエハステージWSTの位置制御を行うことができるため、ウエハステージWSTに保持されたウエハWに対する露光を精度良く行うことが可能である。
【0148】
また、本実施形態によると、検出装置により、CDバー46上の基準格子52の表面状態(異物の存在状態)も検出するため、該表面状態を考慮(異物を除去するなど)して、Sec-BCHK(インターバル)を行うことで、セカンダリアライメント系AL2n(の検出中心)の、プライマリアライメント系AL1(の検出中心)を基準とする相対位置関係を高精度に検出することが可能である。また、この結果を用いて露光を行うことで高精度な露光を実現可能である。
【0149】
また、本実施形態によると、計測の短期安定性が良好なエンコーダ70A〜70D等を含むエンコーダシステムによってウエハステージWSTのXY平面内の位置情報を計測するので、空気揺らぎなどの影響を受けることなく、高精度に計測することができる。
【0150】
なお、上記実施形態では、露光装置100の露光動作、アライメント動作、又はウエハ交換動作などを行うのと並行して、スケール表面の異物の検出(検査)を行うこととしたが、本発明はこれに限られるものではない。例えば、露光装置100がアイドル状態(すなわち、露光動作、アライメント動作、及びウエハ交換動作などのいずれも行っていない待機状態)にあるときに、スケール表面全域に検出装置の検出ビームが照射されるようにウエハステージWSTを移動させて、スケール表面の異物検査を行うこととしても良い。
【0151】
また、異物検査のタイミングとしては、上記実施形態のように、ウエハ1枚を露光するごとに異物検査を行う場合に限らず、所定枚数のウエハを露光する度、又は所定時間経過するごとなど、所定間隔毎に行うこととしても良いし、作業者による指示があったとき(露光装置100の入力装置(例えば、検査開始ボタン)に対する入力があったとき)にのみ行うこととしても良い。また、所定間隔ごとに異物の検出(検査)を行うとともに、作業者から指示があったときにも異物の検出(検査)を行うようなシーケンスを採用しても良い。また、1枚のウエハに対する露光を行う際に、スケールの一部の異物検査を行い、残りの部分の異物検査は、それ以降のウエハに対する露光を行う際に行うようなシーケンスを採用しても良い。
【0152】
なお、上記実施形態では、スケール表面に異物が存在していた場合に、局所液浸装置8の液体(液浸露光に用いる液体)を用いて、異物を除去(洗浄)することとしていたが、これに限られるものではなく、例えば、液浸露光に用いる液体とは異なる液体(洗浄液)を局所液浸装置8から供給して、該洗浄液を用いて異物を除去(洗浄)することとしても良い。この洗浄液としては、たとえば、液体Lqよりも酸素濃度が高い液体(例えば、脱気処理を施さない液体)を用いることとしても良い。このような液体を用いて洗浄を行うことで、異物(例えば有機物から成る異物)の酸化分解を促進させることが可能となる。なお、このような液体に代えて、例えば過酸化水素水を用いて洗浄を行うこととしても良い。また、液浸露光用あるいは洗浄用の液体によるスケールの洗浄時、例えば、露光光ILによる光洗浄、及び/又は超音波洗浄などを併用しても良い。
【0153】
また、局所液浸装置8と同様の装置を露光装置100に設けておき、該装置を用いて、スケール上の異物の除去を行うこととしても良い。すなわち、局所液浸装置8と少なくとも一部が異なる洗浄装置(異物除去装置)を投影光学系PL(ノズルユニット32)とは別の位置、例えば投影光学系PLを介して露光光ILが照射される露光位置とウエハの交換位置との間のウエハステージWSTの移動経路上に設けても良い。
【0154】
また、液体を用いて異物を除去する場合に限らず、気体を噴出するエアブロー装置を露光装置100内に設けておき、該エアブロー装置から噴出される気体を用いて、スケール表面の異物除去を行うこととしても良い。また、異物を加熱することにより除去する加熱装置を露光装置100内に設け、これを用いて異物を除去することとしても良い。
【0155】
また、スケール表面に異物が存在する場合に、主制御装置20が作業者(オペレータ)に対して警告を発するのみでも良い。この場合、作業者(オペレータ)は、露光装置を停止してメンテナンス作業を行うこととしても良い。また、上記実施形態では、異物が所定個数以上存在した場合にのみ、異物除去作業を行う(又は警告を発する)ようにしても良い。あるいは、前述のように露光動作が実行不能となる場合にのみ、異物除去動作を行う、又は警告を発するようにしても良い。
【0156】
なお、上記実施形態の露光装置100では、図3に示されるように、6つの検出装置(PDX1〜PDX4、PDY1、PDY2)を設けることとしたが、これに限らず、スケールの全域に対して検出ビームを照射することができれば、その数は問わない。また、検出装置の配置についても、スケールの全域に対して検出ビームを照射することができるのであれば、上記実施形態の配置に限られるものではない。なお、異物検出を行う領域は、スケールの全面でも良いし、ウエハステージWSTの位置計測に必要な領域のみでも良い。
【0157】
なお、これまでは、スケール上の異物がごみ又は水滴である場合について説明したが、検出装置の検出の対象である異物は、ごみ、あるいは水滴に限られない。
【0158】
また、上記実施形態では、エンコーダシステム200のエンコーダによる位置計測に関連して、スケール上の異物の検出、及びこれに伴う種々の処理を行う場合について説明したが、スケールを検出面とする前述のZセンサについても同様に適用できる。すなわち、異物(非計測領域)を避けてZセンサを選択する、異物によってZセンサの計測不良が生じるならスケールの洗浄又は交換を行うなどの処理を行うことができる。
【0159】
また、上記実施形態では、図7(A)に示されるように、ビームスプリッタなどの光学素子で光源からの光を分岐し、分岐後の光を反射する2枚の反射ミラーを備えた回折干渉方式のエンコーダをエンコーダ70A〜70Fとして用いるものとしたが、これに限らず、3格子の回折干渉式のエンコーダ、ピックアップ方式、磁気方式、あるいは、例えば、特開2005−114406号公報などに開示されるような、光反射ブロックを備えたエンコーダ、例えば米国特許第6,639,686号明細書などに開示されるいわゆるスキャンエンコーダなどを用いても良い。また、上記実施形態では、ヘッドユニット62A〜62Dは、所定間隔で配置された複数のヘッドを有するものとしたが、これに限らず、Yスケール又はXスケールのピッチ方向に細長く延びる領域に光ビームを射出する光源と、光ビームのYスケール又はXスケール(回折格子)からの反射光(回折光)を受光する、Yスケール又はXスケールのピッチ方向に隙間無く配列された多数の受光素子とを備えた単一のヘッドを採用しても良い。
【0160】
また、上記実施形態では、エンコーダヘッドとしてXヘッド又はYヘッド、すなわち一次元のヘッドを用いるものとしたが、これに限らず、直交2軸方向を計測方向とする2次元ヘッド(2Dヘッド)を用いても良い。また、エンコーダヘッドとしてZセンサとの一体型のヘッドを用いても良い。後者の場合、Zセンサとエンコーダヘッドとの単なる組み合わせでも良いが、Zセンサとエンコーダヘッドとの機能を備えた単一のセンサを、エンコーダヘッドとして用いても良い。
【0161】
また、上記実施形態では、第2撥水板28bが、2枚の板状部材29a,29bを貼りあわせることにより形成された場合について説明したが、これに限らず、第2撥水板28bを1枚の板状部材で構成し、その上面に直接回折格子を形成することとしても良い。また、第2撥水板28bの上面に回折格子を形成し、撥水板28bの上面にヘッドユニット62A〜62Dからの検出光が透過可能な保護部材(例えば、薄膜)を設け、回折格子の損傷などを防止しても良い。また、ウエハステージWST表面に回折格子を直接形成し、その回折格子を覆うように、第2撥水板28bを設けることとしても良い。また、回折格子としては、狭いスリット又は溝等が機械的に刻まれたものを採用しても良いし、例えば、感光性樹脂に干渉縞を焼き付けて作成したものを採用しても良い。
【0162】
また、上記実施形態では、XY平面とほぼ平行なウエハステージWSTの上面に反射型の回折格子を設けるものとしたが、例えばウエハステージWSTの下面に反射型の回折格子を設けても良い。この場合、ヘッドユニット62A〜62DはウエハステージWSTの下面が対向する、例えばベースプレートに配置される。さらに、例えば米国特許出願公開第2006/0227309号、第2007/0052976号、第2007/0263197号などに開示されているように、ウエハステージWSTにエンコーダヘッドを設け、これに対向してウエハステージWSTの上方にスケールを設けるエンコーダシステムを採用しても良い。この場合、ウエハステージWSTにZセンサをも配置してよく、スケールの所定面(例えば表面)を、Zセンサからの計測ビームを反射する反射面として兼用しても良い。また、例えば、ベース盤12に配置される可動体に前述の検出装置を設け、可動体を移動しながらスケールの全面で異物検出を行っても良い。さらに、その可動体に前述の異物除去装置も設け、異物検出結果に基づいてスケールの異物を除去しても良い。なお、可動体は計測ステージMSTでも良いし、ウエハステージWST及び計測ステージMSTとは別に設けても良い。また、前述の検出装置と異物除去装置とを異なる可動体に搭載しても良い。また、上記実施形態ではウエハステージWSTを水平面内で移動させるものとしたが、水平面と交差する平面(例えば、ZX平面など)内で移動させても良い。また、レチクルステージRSTの位置をエンコーダシステムによって計測しても良い。例えば、レチクルステージRSTが2次元移動する場合、前述のエンコーダシステムと同様の構成のエンコーダシステムを設けてレチクルステージRSTの位置情報を計測しても良い。この場合、レチクルステージRSTに設けられるスケール(回折格子)上の異物を検出するために、例えば前述の検出装置を用いることとしても良い。いずれにしても、回折格子(スケール)に対向する位置に上記実施形態の検出装置を設けることで、スケール上の異物を検出することが可能である。
【0163】
また、異物を検出する検出装置としては、上記実施形態(図4(A))のような構成に限られるものではなく、スケールに対して検出ビームを照射し、該スケールを介した検出ビームを受光することにより異物を検出する検出装置であれば、その他の構成を採用しても良い。例えば、前述の多点AF系を検出装置として用いても良く、この場合、多点AF系とは別に前述の検出装置を設けなくても良い。また、例えば、前述したZセンサなどを用いて、ウエハステージWST上面のウエハWが載置される領域以外の領域の表面(スケール表面を含む)、すなわちZセンサの計測面のZ位置を検出する場合などには、検出装置は、スケールに限らず、ウエハステージWST上面のウエハWが載置される領域以外の領域の表面(計測面)の異物を検出することとすれば良い。このようにすると、上記実施形態において各検出装置によりスケール上の異物を検出する場合と同様にして、上記実施形態の各検出装置と同じ又は異なる検出装置により、上記計測面上の異物を検出することができ、これによって上記実施形態と同等の効果を得ることができる。
【0164】
なお、上記実施形態ではノズルユニット32の下面と投影光学系PLの先端光学素子の下端面とがほぼ同一面であるものとしたが、これに限らず、例えばノズルユニット32の下面を、先端光学素子の射出面よりも投影光学系PLの像面(すなわちウエハ)の近くに配置しても良い。すなわち、局所液浸装置8は上述の構造に限られず、例えば、欧州特許公開第1420298号公報、国際公開第2004/055803号、国際公開第2004/057590号、国際公開第2005/029559号(対応米国特許公開第2006/0231206号)、国際公開第2004/086468号(対応米国特許公開第2005/0280791号)、特開2004−289126号公報(対応米国特許第6,952,253号)などに記載されているものを用いることができる。また、例えば国際公開第2004/019128号(対応米国特許公開第2005/0248856号)に開示されているように、先端光学素子の像面側の光路に加えて、先端光学素子の物体面側の光路も液体で満たすようにしても良い。さらに、先端光学素子の表面の一部(少なくとも液体との接触面を含む)又は全部に、親液性及び/又は溶解防止機能を有する薄膜を形成しても良い。なお、石英は液体との親和性が高く、かつ溶解防止膜も不要であるが、蛍石は少なくとも溶解防止膜を形成することが好ましい。
【0165】
なお、上記実施形態では、液体として純水(水)を用いるものとしたが、本発明がこれに限定されないことは勿論である。
【0166】
また、上記実施形態で、回収された液体を再利用するようにしても良く、この場合は回収された液体から不純物を除去するフィルタを液体回収装置、又は回収管等に設けておくことが望ましい。
【0167】
なお、上記実施形態では、露光装置が液浸型の露光装置である場合について説明したが、これに限られるものではなく、液体(水)を介さずにウエハWの露光を行うドライタイプの露光装置にも採用することができる。
【0168】
なお、上記実施形態では、ウエハステージWST(移動体)、計測ステージMST(別の移動体)、アライメント系(AL1、AL21〜AL24)、多点AF系(90a,90b)、干渉計システム118、及びエンコーダシステム200などの全てを備えた露光装置に本発明が適用された場合について説明したが、本発明がこれに限定されるものでない。例えば、計測ステージMSTなどが設けられていない露光装置にも、本発明は適用が可能である。また、干渉計システムとエンコーダシステムとは、必ずしも両方設ける必要はないことは勿論である。すなわち、エンコーダシステムのみを設けるだけでも良い。
【0169】
なお、上記実施形態では、アライメント系としては、FIA系を採用した場合について説明したが、これに限らず、例えばコヒーレントな検出光を対象マークに照射し、その対象マークから発生する散乱光又は回折光を検出する、あるいはその対象マークから発生する2つの回折光(例えば同次数の回折光、あるいは同方向に回折する回折光)を干渉させて検出するアライメントセンサを単独であるいは適宜組み合わせて用いることは勿論可能である。また、上記実施形態では5つのアライメント系AL1、AL21〜AL24を設けるものとしているが、その数は5つに限られるものでなく、2つ以上かつ4つ以下、あるいは6つ以上でも良いし、奇数ではなく偶数でも良い。さらに、アライメント系は1つでも良いし、可動及び固定のいずれでも良い。
【0170】
また、上記実施形態では、ステップ・アンド・スキャン方式等の走査型露光装置に本発明が適用された場合について説明したが、これに限らず、ステッパなどの静止型露光装置に本発明を適用しても良い。ステッパなどであっても、露光対象の物体が搭載されたステージの位置をエンコーダで計測することにより、同様に、空気揺らぎに起因する位置計測誤差の発生を殆ど零にすることができる。この場合、エンコーダの計測値の短期変動を干渉計の計測値を用いて補正する補正情報とエンコーダの計測値とに基づいて、ステージを高精度に位置決めすることが可能になり、結果的に高精度なレチクルパターンの物体上への転写が可能になる。また、ショット領域とショット領域とを合成するステップ・アンド・スティッチ方式の縮小投影露光装置、プロキシミティー方式の露光装置、又はミラープロジェクション・アライナーなどにも本発明は適用することができる。さらに、例えば特開平10−163099号公報及び特開平10−214783号公報(対応米国特許第6,590,634号)、特表2000−505958号公報(対応米国特許第5,969,441号)、米国特許第6,208,407号などに開示されているように、複数のウエハステージを備えたマルチステージ型の露光装置にも本発明を適用できる。
【0171】
また、上記実施形態の露光装置における投影光学系は縮小系のみならず等倍および拡大系のいずれでも良いし、投影光学系PLは屈折系のみならず、反射系及び反射屈折系のいずれでも良いし、その投影像は倒立像及び正立像のいずれでも良い。さらに、投影光学系PLを介して照明光ILが照射される露光領域IAは、投影光学系PLの視野内で光軸AXを含むオンアクシス領域であるが、例えば国際公開第2004/107011号に開示されるように、複数の反射面を有しかつ中間像を少なくとも1回形成する光学系(反射系又は反屈系)がその一部に設けられ、かつ単一の光軸を有する、いわゆるインライン型の反射屈折系と同様に、その露光領域は光軸AXを含まないオフアクシス領域でも良い。また、前述の照明領域及び露光領域はその形状が矩形であるものとしたが、これに限らず、例えば円弧、台形、あるいは平行四辺形などでも良い。
【0172】
なお、上記実施形態の露光装置の光源は、ArFエキシマレーザに限らず、KrFエキシマレーザ(出力波長248nm)、F2レーザ(出力波長157nm)、Ar2レーザ(出力波長126nm)、Kr2レーザ(出力波長146nm)などのパルスレーザ光源、あるいはg線(波長436nm)、i線(波長365nm)などの輝線を発する超高圧水銀ランプなどを用いることも可能である。また、YAGレーザの高調波発生装置などを用いることもできる。この他、例えば国際公開第1999/46835号(対応米国特許7,023,610号)に開示されているように、真空紫外光としてDFB半導体レーザ又はファイバーレーザから発振される赤外域、又は可視域の単一波長レーザ光を、例えばエルビウム(又はエルビウムとイッテルビウムの両方)がドープされたファイバーアンプで増幅し、非線形光学結晶を用いて紫外光に波長変換した高調波を用いても良い。
【0173】
また、上記実施形態では、露光装置の照明光ILとしては波長100nm以上の光に限らず、波長100nm未満の光を用いても良いことはいうまでもない。例えば、近年、70nm以下のパターンを露光するために、SOR又はプラズマレーザを光源として、軟X線領域(例えば5〜15nmの波長域)のEUV(Extreme Ultraviolet)光を発生させるとともに、その露光波長(例えば13.5nm)の下で設計されたオール反射縮小光学系、及び反射型マスクを用いたEUV露光装置の開発が行われている。この装置においては、円弧照明を用いてマスクとウエハを同期走査してスキャン露光する構成が考えられるので、かかる装置にも本発明を好適に適用することができる。この他、電子線又はイオンビームなどの荷電粒子線を用いる露光装置にも、本発明は適用できる。
【0174】
また、上述の実施形態においては、光透過性の基板上に所定の遮光パターン(又は位相パターン・減光パターン)を形成した光透過型マスク(レチクル)を用いたが、このレチクルに代えて、例えば米国特許第6,778,257号公報に開示されているように、露光すべきパターンの電子データに基づいて、透過パターン又は反射パターン、あるいは発光パターンを形成する電子マスク(可変成形マスク、アクティブマスク、あるいはイメージジェネレータとも呼ばれ、例えば非発光型画像表示素子(空間光変調器)の一種であるDMD(Digital Micro-mirror Device)などを含む)を用いても良い。
【0175】
また、例えば国際公開第2001/035168号に開示されているように、干渉縞をウエハ上に形成することによって、ウエハ上にライン・アンド・スペースパターンを形成する露光装置(リソグラフィシステム)にも本発明を適用することができる。
【0176】
さらに、例えば特表2004−519850号公報(対応米国特許第6,611,316号)に開示されているように、2つのレチクルパターンを投影光学系を介してウエハ上で合成し、1回のスキャン露光によってウエハ上の1つのショット領域をほぼ同時に二重露光する露光装置にも本発明を適用することができる。
【0177】
また、物体上にパターンを形成する装置は、前述の露光装置(リソグラフィシステム)に限られず、例えばインクジェット方式にて物体上にパターンを形成する装置にも本発明を適用することができる。
【0178】
なお、上記実施形態でパターンを形成すべき物体(エネルギビームが照射される露光対象の物体)はウエハに限られるものではなく、ガラスプレート、セラミック基板、フィルム部材、あるいはマスクブランクスなど、他の物体でも良い。
【0179】
露光装置の用途としては半導体製造用の露光装置に限定されることなく、例えば、角型のガラスプレートに液晶表示素子パターンを転写する液晶用の露光装置、有機EL、薄膜磁気ヘッド、撮像素子(CCD等)、マイクロマシン及びDNAチップなどを製造するための露光装置にも広く適用できる。また、半導体素子などのマイクロデバイスだけでなく、光露光装置、EUV露光装置、X線露光装置、及び電子線露光装置などで使用されるレチクル又はマスクを製造するために、ガラス基板又はシリコンウエハなどに回路パターンを転写する露光装置にも本発明を適用できる。
【0180】
また、上記実施形態の露光装置(パターン形成装置)は、本願請求の範囲に挙げられた各構成要素を含む各種サブシステムを、所定の機械的精度、電気的精度、光学的精度を保つように、組み立てることで製造される。これら各種精度を確保するために、この組み立ての前後には、各種光学系については光学的精度を達成するための調整、各種機械系については機械的精度を達成するための調整、各種電気系については電気的精度を達成するための調整が行われる。各種サブシステムから露光装置への組み立て工程は、各種サブシステム相互の、機械的接続、電気回路の配線接続、気圧回路の配管接続等が含まれる。この各種サブシステムから露光装置への組み立て工程の前に、各サブシステム個々の組み立て工程があることはいうまでもない。各種サブシステムの露光装置への組み立て工程が終了したら、総合調整が行われ、露光装置全体としての各種精度が確保される。なお、露光装置の製造は温度およびクリーン度等が管理されたクリーンルームで行うことが望ましい。
【0181】
半導体素子などの電子デバイスは、デバイスの機能・性能設計を行うステップ、この設計ステップに基づいたレチクルを製作するステップ、シリコン材料からウエハを製作するステップ、上記実施形態の露光装置(パターン形成装置)によりマスク(レチクル)のパターンをウエハに転写するリソグラフィステップ、露光されたウエハを現像する現像ステップ、レジストが残存している部分以外の部分の露出部材をエッチングにより取り去るエッチングステップ、エッチングが済んで不要となったレジストを取り除くレジスト除去ステップ、デバイス組み立てステップ(ダイシング工程、ボンディング工程、パッケージ工程を含む)、検査ステップ等を経て製造される。この場合、リソグラフィステップで、上記実施形態の露光装置(パターン形成装置)を用いて前述の露光方法が実行され、ウエハ上にデバイスパターンが形成されるので、高集積度のデバイスを生産性良く製造することができる。
【産業上の利用可能性】
【0182】
以上説明したように、本発明の検出装置は、移動体に設けられた計測面の表面状態を検出するのに適している。また、本発明の移動体装置は、露光装置に用いるのに適している。また、本発明のパターン形成装置及び方法は、移動体に保持された物体上にパターンを形成するのに適している。また、本発明の露光装置は、エネルギビームで物体を露光して、前記物体にパターンを形成するのに適している。また、本発明のデバイス製造方法は、半導体素子、液晶表示素子等の電子デバイスを製造するのに適している。
【符号の説明】
【0183】
8…局所液浸装置、20…主制御装置、29a…板状部材、29b…板状部材、39Y1,39Y2…Yスケール、39X1,39X2…Xスケール、50…ステージ装置、62A〜62D…ヘッドユニット、69A…照射系、69B…受光系、70A,70C…Yエンコーダ、70B、70D…Xエンコーダ、70E,70F…Yリニアエンコーダ、100…露光装置、191…先端レンズ、BA…照射領域、IL…照明光、MST…計測ステージ、PDX1〜PDX4,PDY1,PDY2…検出装置、W…ウエハ、WST…ウエハステージ。
【特許請求の範囲】
【請求項1】
移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の、表面状態を検出する検出装置であって、
前記計測部材に対して光ビームを照射する照射系と、
前記計測部材を介した光ビームを検出する検出系と、を備える検出装置。
【請求項2】
請求項1に記載の検出装置において、
前記計測部材は、前記所定方向を周期方向とする格子を有するグレーティング部材によって構成され、
前記検出系は、前記光ビームを検出することで、前記グレーティング部材の表面状態を検出する検出装置。
【請求項3】
請求項1又は2に記載の検出装置において、
前記照射系は、前記光ビームを、前記計測部材に対してほぼ平行に照射する検出装置。
【請求項4】
請求項1〜3のいずれか一項に記載の検出装置において、
前記照射系は、前記光ビームを照射して、前記所定方向に交差する方向に延びる帯状の照射領域を前記計測部材上に形成する検出装置。
【請求項5】
請求項4に記載の検出装置において、
前記検出系は、前記検出系が受光した光ビームの前記計測部材上における照射位置の座標を検出する検出装置。
【請求項6】
請求項1〜5のいずれか一項に記載の検出装置において、
前記計測部材の表面状態は、前記計測部材の表面に異物が存在するか否かを含む検出装置。
【請求項7】
計測部材が設けられた移動体と、
前記計測部材と対向するヘッドを有し、該ヘッドによって前記移動体の前記所定方向の位置情報を計測する計測装置と、
前記計測部材の表面状態を検出する請求項1〜5のいずれか一項に記載の検出装置と、を備える移動体装置。
【請求項8】
前記移動体が物体を保持する請求項7に記載の移動体装置と、
前記物体上にパターンを生成するパターン生成装置と、を備えるパターン形成装置。
【請求項9】
請求項8に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記物体上へのパターン形成のための移動を含む動作を前記移動体が行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項10】
請求項8に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記物体上に配置されたマークの検出のための移動を含む動作を前記移動体が行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項11】
請求項8に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記移動体が、該移動体から物体をアンロードする位置から前記移動体に対して物体をロードする位置までの移動を含む動作を行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項12】
請求項8〜11のいずれか一項に記載のパターン形成装置において、
前記計測部材の表面状態は、前記計測部材の表面上に異物が存在するか否かを含むパターン形成装置。
【請求項13】
請求項12に記載のパターン形成装置において、
前記検出装置の検出結果に基づいて、前記計測部材の表面上に存在する異物を除去する異物除去装置を更に備えるパターン形成装置。
【請求項14】
請求項13に記載のパターン形成装置において、
前記パターン生成装置は、前記物体に対向して配置され、エネルギビームを射出する光学部材と、前記光学部材と前記物体の間を液体で満たして液浸領域を形成する液浸システムと、を有し、
前記異物除去装置は、前記液浸システムを含むパターン形成装置。
【請求項15】
請求項14に記載のパターン形成装置において、
前記液浸システムは、前記異物の除去に際して、前記液浸領域を形成する液体とは異なる液体を用いるパターン形成装置。
【請求項16】
請求項8〜15のいずれか一項に記載のパターン形成装置において、
前記検出装置の検出結果に応じて、警告を発する警告装置を更に備えるパターン形成装置。
【請求項17】
請求項8〜16のいずれか一項に記載のパターン形成装置において、
前記移動体とは異なる、別の移動体を更に備え、
前記検出装置は、前記別の移動体に設けられた計測部材の表面状態をも検出するパターン形成装置。
【請求項18】
請求項8〜17のいずれか一項に記載のパターン形成装置において、
前記移動体の前記物体を保持する側の面と、前記計測部材の表面とは、前記移動体に保持された前記物体の表面と同一面に設定されているパターン形成装置。
【請求項19】
請求項8〜18のいずれか一項に記載のパターン形成装置において、
前記パターン生成装置は、エネルギビームで物体を露光して、前記物体にパターンを形成するパターン形成装置。
【請求項20】
エネルギビームにより物体を露光して、前記物体にパターンを形成する露光装置であって、
前記移動体が前記物体を保持する請求項7に記載の移動体装置を備える露光装置。
【請求項21】
請求項20に記載の露光装置において、
前記移動体の前記物体を保持する側の面と、前記計測部材の表面とは、前記移動体に保持された前記物体の表面と同一面に設定されている露光装置。
【請求項22】
請求項20又は21に記載の露光装置において、
前記物体に対向して配置された光学部材と、
前記光学部材と前記物体との間に液体を満たして液浸領域を形成する液浸システムと、を更に備え、
前記液浸領域は、前記移動体の移動中に前記計測部材上を通過する露光装置。
【請求項23】
計測部材が設けられた移動体と、
前記計測部材に対向するとき該計測部材に計測ビームを照射し、前記計測部材を介した前記計測ビームを受光するヘッドを有し、該ヘッドによって前記移動体の所定方向の位置情報を計測する計測装置と、
前記計測部材の表面状態を検出する検出装置と、を備える移動体装置。
【請求項24】
請求項23に記載の移動体装置において、
前記計測部材は、前記所定方向を周期方向とする格子を有するグレーティング部材によって構成され、
前記検出装置は、前記グレーティング部材の表面状態を検出する移動体装置。
【請求項25】
請求項24に記載の移動体装置において、
前記グレーティング部材は、前記格子が形成される第1板状部材と、該第1板状部材の前記格子部分を覆う状態で前記第1板状部材に取り付けられた第2板状部材とを有する移動体装置。
【請求項26】
請求項24又は25に記載の移動体装置において、
前記移動体には、前記所定方向を第1軸に平行な方向とする第1格子が形成されたグレーティング部材と、前記所定方向を前記第1軸に対して直交する第2軸に平行な方向とする第2格子が形成されたグレーティング部材とが設けられ、
前記計測装置は、前記第1軸に平行な方向に交差する方向に関して位置が異なる複数の第1ヘッドを有し、前記第1格子と対向する第1ヘッドによって前記移動体の前記第1軸に平行な方向の位置情報を計測する第1軸エンコーダと、前記第2軸に平行な方向に交差する方向に関して位置が異なる複数の第2ヘッドを有し、前記第2格子と対向する第2ヘッドによって前記移動体の前記第2軸に平行な方向の位置情報を計測する第2軸エンコーダとを含む移動体装置。
【請求項27】
請求項26に記載の移動体装置において、
前記検出装置は、前記第1格子が形成されたグレーティング部材の表面状態を検出するための前記光ビームの照射領域と、前記第2格子が形成されたグレーティング部材の表面状態を検出するための前記光ビームの照射領域と、を有する移動体装置。
【請求項28】
請求項24〜27のいずれか一項に記載の移動体装置において、
前記検出装置は、
前記グレーティング部材に光ビームを照射する照射系と、
前記グレーティング部材を介した光ビームを検出する検出系と、を有する移動体装置。
【請求項29】
請求項28に記載の移動体装置において、
前記照射系は、前記光ビームを前記グレーティング部材の表面に対してほぼ平行に照射する移動体装置。
【請求項30】
請求項28又は29に記載の移動体装置において、
前記照射系は、前記光ビームを照射して、前記所定方向に交差する方向に延びる帯状の照射領域を前記グレーティング部材上に形成する移動体装置。
【請求項31】
請求項30に記載の移動体装置において、
前記検出系は、該検出系が受光した光ビームの前記グレーティング部材上における照射位置の座標を検出する移動体装置。
【請求項32】
請求項30又は31に記載の移動体装置において、
前記検出装置による検出と並行して、前記照明領域と前記グレーティング部材との前記所定方向に関する相対位置を変更する制御装置を更に備える移動体装置。
【請求項33】
請求項32に記載の移動体装置において、
前記制御装置は、前記相対位置の変更を、前記移動体の移動により行う移動体装置。
【請求項34】
前記移動体が物体を保持する請求項23〜33のいずれか一項に記載の移動体装置と、
前記物体上にパターンを生成するパターン生成装置と、を備えるパターン形成装置。
【請求項35】
請求項34に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記物体上へのパターン形成のための移動を含む動作を前記移動体が行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項36】
請求項34に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記物体上に配置されたマークの検出のための移動を含む動作を前記移動体が行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項37】
請求項34に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記移動体が、該移動体から物体をアンロードする位置から前記移動体に対して物体をロードする位置までの移動を含む動作を行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項38】
請求項34〜37のいずれか一項に記載のパターン形成装置において、
前記計測部材の表面状態は、前記計測部材の表面に異物が存在するか否かを含むパターン形成装置。
【請求項39】
請求項38に記載のパターン形成装置において、
前記検出装置の検出結果に基づいて、前記計測部材の表面上に存在する異物を除去する異物除去装置を更に備えるパターン形成装置。
【請求項40】
請求項39に記載のパターン形成装置において、
前記パターン生成装置は、前記物体に対向して配置され、エネルギビームを射出する光学部材と、前記光学部材と前記物体の間を液体で満たして液浸領域を形成する液浸システムと、を有し、
前記異物除去装置は、前記液浸システムを含むパターン形成装置。
【請求項41】
請求項40に記載のパターン形成装置において、
前記液浸システムは、前記異物の除去に際して、前記液浸領域を形成する液体とは異なる液体を用いるパターン形成装置。
【請求項42】
請求項34〜41のいずれか一項に記載のパターン形成装置において、
前記検出装置の検出結果に基づいて、前記計測部材の表面の洗浄を行うか、それとも前記物体上へのパターン形成のための前記移動体による一連の動作を続行するかを判断し、前記一連の動作を続行する場合、その動作中に、異物と対向するヘッドを使わないように、異物を避けて前記計測装置のヘッドを選択する選択装置をさらに備えるパターン形成装置。
【請求項43】
請求項34〜42のいずれか一項に記載のパターン形成装置において、
前記検出装置の検出結果に応じて、警告を発する警告装置を更に備えるパターン形成装置。
【請求項44】
請求項34〜43のいずれか一項に記載のパターン形成装置において、
前記移動体とは異なる、別の移動体を更に備え、
前記検出装置は、前記別の移動体に設けられた計測部材の表面状態をも検出するパターン形成装置。
【請求項45】
請求項34〜44のいずれか一項に記載のパターン形成装置において、
前記移動体の前記物体を保持する側の面と、前記計測部材の表面とは、前記移動体に保持された前記物体の表面と同一面に設定されているパターン形成装置。
【請求項46】
請求項34〜45のいずれか一項に記載のパターン形成装置において、
前記パターン生成装置は、エネルギビームで物体を露光して、前記物体にパターンを形成するパターン形成装置。
【請求項47】
エネルギビームにより物体を露光して、前記物体にパターンを形成する露光装置であって、
前記移動体が前記物体を保持する請求項23〜33のいずれか一項に記載の移動体装置を備える露光装置。
【請求項48】
請求項47に記載の露光装置において、
前記移動体の前記物体を保持する側の面と、前記計測部材の表面とは、前記移動体に保持された前記物体の表面と同一面に設定されている露光装置。
【請求項49】
請求項47又は48に記載の露光装置において、
前記物体に対向して配置された光学部材と、
前記光学部材と前記物体との間に液体を満たして液浸領域を形成する液浸システムと、を更に備え、
前記液浸領域は、前記移動体の移動中に前記計測部材上を通過する露光装置。
【請求項50】
載置された物体を保持して所定の平面内を移動する移動体と、
前記移動体の前記物体が載置された前記平面に平行な一面と対向するヘッドを有し、該ヘッドによって前記移動体の前記一面の前記物体の載置領域外の領域に計測ビームを照射することで、前記移動体の所定方向の位置情報を計測する計測装置と、
前記移動体の前記一面の前記物体の載置領域外の領域の表面状態を検出する検出装置と、を備える移動体装置。
【請求項51】
請求項50に記載の移動体装置と、
前記移動体に載置された物体上にパターンを生成するパターン生成装置と、を備えるパターン形成装置。
【請求項52】
請求項51に記載のパターン形成装置において、
前記パターン生成装置は、エネルギビームを照射して前記物体を露光することで、前記物体上にパターンを形成するパターン形成装置。
【請求項53】
移動体に保持された物体上にパターンを形成するパターン形成工程と、
前記移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の表面状態を検出する検出工程と、を含むパターン形成方法。
【請求項54】
請求項53に記載のパターン形成方法において、
前記検出工程では、前記所定方向を周期方向とする格子が形成されたグレーティング部材の表面状態を検出するパターン形成方法。
【請求項55】
請求項54に記載のパターン形成方法において、
前記検出工程では、前記グレーティング部材表面に光ビームを照射して、前記グレーティング部材表面を介した光ビームを検出するパターン形成方法。
【請求項56】
請求項55に記載のパターン形成方法において、
前記検出工程では、前記光ビームを前記グレーティング部材の表面に対してほぼ平行に照射するパターン形成方法。
【請求項57】
請求項54〜56のいずれか一項に記載のパターン形成方法において、
前記パターン形成工程では、前記グレーティング部材の格子を用いて、前記移動体の位置を検出するパターン形成方法。
【請求項58】
請求項54〜57のいずれか一項に記載のパターン形成方法において、
前記検出工程の処理の少なくとも一部は、前記パターン形成工程の処理と並行して行われるパターン形成方法。
【請求項59】
請求項54〜58のいずれか一項に記載のパターン形成方法において、
前記パターン形成工程に先立ち、前記物体上に配置されたマークの検出を行うマーク検出工程を更に含み、
前記検出工程の処理の少なくとも一部は、前記マーク検出工程の処理と並行して行われるパターン形成方法。
【請求項60】
請求項54〜59のいずれか一項に記載のパターン形成方法において、
前記移動体に保持された物体をアンロードするアンロード工程と、
前記移動体に物体をロードするロード工程と、を更に含み、
前記検出工程の処理の少なくとも一部は、前記アンロード工程から前記ロード工程に移行する間に行われるパターン形成方法。
【請求項61】
請求項54〜60のいずれか一項に記載のパターン形成方法において、
前記グレーティング部材の表面状態は、前記グレーティング部材の表面に異物が存在するか否かを含み、
前記検出工程の検出結果に応じて、前記グレーティング部材表面の異物を除去する異物除去工程を更に含むパターン形成方法。
【請求項62】
請求項54〜61のいずれか一項に記載のパターン形成方法において、
前記検出工程の検出結果に応じて警告を発する警告工程を更に含むパターン形成方法。
【請求項63】
移動体に保持された物体上にパターンを形成するパターン形成工程と、
前記移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の表面に存在する異物を除去する異物除去工程と、を含むパターン形成方法。
【請求項64】
請求項63に記載のパターン形成方法において、
前記計測部材は、所定方向を周期方向とする格子が形成されたグレーティング部材であり、
前記除去工程では、前記グレーティング部材の表面に存在する異物を除去するパターン形成方法。
【請求項65】
請求項63又は64に記載のパターン形成方法において、
前記パターン形成工程では、前記物体に対向して配置された光学部材と、液浸システムにより前記光学部材と前記物体との間に満たされた液体とを介して、エネルギビームが物体上に照射され、
前記異物除去工程では、前記液浸システムの液体により、前記計測部材の表面上存在する異物を除去するパターン形成方法。
【請求項66】
請求項63〜65のいずれか一項に記載のパターン形成方法において、
前記異物除去工程に先立って、前記計測部材の表面上の異物を検出する検出工程を更に含むパターン形成方法。
【請求項67】
請求項66に記載のパターン形成方法において、
前記検出工程では、前記計測部材に光ビームを照射して、前記計測部材を介した光ビームを検出するパターン形成方法。
【請求項68】
請求項53〜67のいずれか一項に記載のパターン形成方法により物体上にパターンを形成する工程と、
パターンが形成された前記物体に処理を施す工程と、を含むデバイス製造方法。
【請求項1】
移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の、表面状態を検出する検出装置であって、
前記計測部材に対して光ビームを照射する照射系と、
前記計測部材を介した光ビームを検出する検出系と、を備える検出装置。
【請求項2】
請求項1に記載の検出装置において、
前記計測部材は、前記所定方向を周期方向とする格子を有するグレーティング部材によって構成され、
前記検出系は、前記光ビームを検出することで、前記グレーティング部材の表面状態を検出する検出装置。
【請求項3】
請求項1又は2に記載の検出装置において、
前記照射系は、前記光ビームを、前記計測部材に対してほぼ平行に照射する検出装置。
【請求項4】
請求項1〜3のいずれか一項に記載の検出装置において、
前記照射系は、前記光ビームを照射して、前記所定方向に交差する方向に延びる帯状の照射領域を前記計測部材上に形成する検出装置。
【請求項5】
請求項4に記載の検出装置において、
前記検出系は、前記検出系が受光した光ビームの前記計測部材上における照射位置の座標を検出する検出装置。
【請求項6】
請求項1〜5のいずれか一項に記載の検出装置において、
前記計測部材の表面状態は、前記計測部材の表面に異物が存在するか否かを含む検出装置。
【請求項7】
計測部材が設けられた移動体と、
前記計測部材と対向するヘッドを有し、該ヘッドによって前記移動体の前記所定方向の位置情報を計測する計測装置と、
前記計測部材の表面状態を検出する請求項1〜5のいずれか一項に記載の検出装置と、を備える移動体装置。
【請求項8】
前記移動体が物体を保持する請求項7に記載の移動体装置と、
前記物体上にパターンを生成するパターン生成装置と、を備えるパターン形成装置。
【請求項9】
請求項8に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記物体上へのパターン形成のための移動を含む動作を前記移動体が行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項10】
請求項8に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記物体上に配置されたマークの検出のための移動を含む動作を前記移動体が行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項11】
請求項8に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記移動体が、該移動体から物体をアンロードする位置から前記移動体に対して物体をロードする位置までの移動を含む動作を行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項12】
請求項8〜11のいずれか一項に記載のパターン形成装置において、
前記計測部材の表面状態は、前記計測部材の表面上に異物が存在するか否かを含むパターン形成装置。
【請求項13】
請求項12に記載のパターン形成装置において、
前記検出装置の検出結果に基づいて、前記計測部材の表面上に存在する異物を除去する異物除去装置を更に備えるパターン形成装置。
【請求項14】
請求項13に記載のパターン形成装置において、
前記パターン生成装置は、前記物体に対向して配置され、エネルギビームを射出する光学部材と、前記光学部材と前記物体の間を液体で満たして液浸領域を形成する液浸システムと、を有し、
前記異物除去装置は、前記液浸システムを含むパターン形成装置。
【請求項15】
請求項14に記載のパターン形成装置において、
前記液浸システムは、前記異物の除去に際して、前記液浸領域を形成する液体とは異なる液体を用いるパターン形成装置。
【請求項16】
請求項8〜15のいずれか一項に記載のパターン形成装置において、
前記検出装置の検出結果に応じて、警告を発する警告装置を更に備えるパターン形成装置。
【請求項17】
請求項8〜16のいずれか一項に記載のパターン形成装置において、
前記移動体とは異なる、別の移動体を更に備え、
前記検出装置は、前記別の移動体に設けられた計測部材の表面状態をも検出するパターン形成装置。
【請求項18】
請求項8〜17のいずれか一項に記載のパターン形成装置において、
前記移動体の前記物体を保持する側の面と、前記計測部材の表面とは、前記移動体に保持された前記物体の表面と同一面に設定されているパターン形成装置。
【請求項19】
請求項8〜18のいずれか一項に記載のパターン形成装置において、
前記パターン生成装置は、エネルギビームで物体を露光して、前記物体にパターンを形成するパターン形成装置。
【請求項20】
エネルギビームにより物体を露光して、前記物体にパターンを形成する露光装置であって、
前記移動体が前記物体を保持する請求項7に記載の移動体装置を備える露光装置。
【請求項21】
請求項20に記載の露光装置において、
前記移動体の前記物体を保持する側の面と、前記計測部材の表面とは、前記移動体に保持された前記物体の表面と同一面に設定されている露光装置。
【請求項22】
請求項20又は21に記載の露光装置において、
前記物体に対向して配置された光学部材と、
前記光学部材と前記物体との間に液体を満たして液浸領域を形成する液浸システムと、を更に備え、
前記液浸領域は、前記移動体の移動中に前記計測部材上を通過する露光装置。
【請求項23】
計測部材が設けられた移動体と、
前記計測部材に対向するとき該計測部材に計測ビームを照射し、前記計測部材を介した前記計測ビームを受光するヘッドを有し、該ヘッドによって前記移動体の所定方向の位置情報を計測する計測装置と、
前記計測部材の表面状態を検出する検出装置と、を備える移動体装置。
【請求項24】
請求項23に記載の移動体装置において、
前記計測部材は、前記所定方向を周期方向とする格子を有するグレーティング部材によって構成され、
前記検出装置は、前記グレーティング部材の表面状態を検出する移動体装置。
【請求項25】
請求項24に記載の移動体装置において、
前記グレーティング部材は、前記格子が形成される第1板状部材と、該第1板状部材の前記格子部分を覆う状態で前記第1板状部材に取り付けられた第2板状部材とを有する移動体装置。
【請求項26】
請求項24又は25に記載の移動体装置において、
前記移動体には、前記所定方向を第1軸に平行な方向とする第1格子が形成されたグレーティング部材と、前記所定方向を前記第1軸に対して直交する第2軸に平行な方向とする第2格子が形成されたグレーティング部材とが設けられ、
前記計測装置は、前記第1軸に平行な方向に交差する方向に関して位置が異なる複数の第1ヘッドを有し、前記第1格子と対向する第1ヘッドによって前記移動体の前記第1軸に平行な方向の位置情報を計測する第1軸エンコーダと、前記第2軸に平行な方向に交差する方向に関して位置が異なる複数の第2ヘッドを有し、前記第2格子と対向する第2ヘッドによって前記移動体の前記第2軸に平行な方向の位置情報を計測する第2軸エンコーダとを含む移動体装置。
【請求項27】
請求項26に記載の移動体装置において、
前記検出装置は、前記第1格子が形成されたグレーティング部材の表面状態を検出するための前記光ビームの照射領域と、前記第2格子が形成されたグレーティング部材の表面状態を検出するための前記光ビームの照射領域と、を有する移動体装置。
【請求項28】
請求項24〜27のいずれか一項に記載の移動体装置において、
前記検出装置は、
前記グレーティング部材に光ビームを照射する照射系と、
前記グレーティング部材を介した光ビームを検出する検出系と、を有する移動体装置。
【請求項29】
請求項28に記載の移動体装置において、
前記照射系は、前記光ビームを前記グレーティング部材の表面に対してほぼ平行に照射する移動体装置。
【請求項30】
請求項28又は29に記載の移動体装置において、
前記照射系は、前記光ビームを照射して、前記所定方向に交差する方向に延びる帯状の照射領域を前記グレーティング部材上に形成する移動体装置。
【請求項31】
請求項30に記載の移動体装置において、
前記検出系は、該検出系が受光した光ビームの前記グレーティング部材上における照射位置の座標を検出する移動体装置。
【請求項32】
請求項30又は31に記載の移動体装置において、
前記検出装置による検出と並行して、前記照明領域と前記グレーティング部材との前記所定方向に関する相対位置を変更する制御装置を更に備える移動体装置。
【請求項33】
請求項32に記載の移動体装置において、
前記制御装置は、前記相対位置の変更を、前記移動体の移動により行う移動体装置。
【請求項34】
前記移動体が物体を保持する請求項23〜33のいずれか一項に記載の移動体装置と、
前記物体上にパターンを生成するパターン生成装置と、を備えるパターン形成装置。
【請求項35】
請求項34に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記物体上へのパターン形成のための移動を含む動作を前記移動体が行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項36】
請求項34に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記物体上に配置されたマークの検出のための移動を含む動作を前記移動体が行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項37】
請求項34に記載のパターン形成装置において、
前記検出装置は、前記光ビームの照射領域を複数有し、
前記複数の照射領域の少なくとも一つは、前記移動体が、該移動体から物体をアンロードする位置から前記移動体に対して物体をロードする位置までの移動を含む動作を行っている間に、前記計測部材の表面状態の検出が可能な位置に配置されているパターン形成装置。
【請求項38】
請求項34〜37のいずれか一項に記載のパターン形成装置において、
前記計測部材の表面状態は、前記計測部材の表面に異物が存在するか否かを含むパターン形成装置。
【請求項39】
請求項38に記載のパターン形成装置において、
前記検出装置の検出結果に基づいて、前記計測部材の表面上に存在する異物を除去する異物除去装置を更に備えるパターン形成装置。
【請求項40】
請求項39に記載のパターン形成装置において、
前記パターン生成装置は、前記物体に対向して配置され、エネルギビームを射出する光学部材と、前記光学部材と前記物体の間を液体で満たして液浸領域を形成する液浸システムと、を有し、
前記異物除去装置は、前記液浸システムを含むパターン形成装置。
【請求項41】
請求項40に記載のパターン形成装置において、
前記液浸システムは、前記異物の除去に際して、前記液浸領域を形成する液体とは異なる液体を用いるパターン形成装置。
【請求項42】
請求項34〜41のいずれか一項に記載のパターン形成装置において、
前記検出装置の検出結果に基づいて、前記計測部材の表面の洗浄を行うか、それとも前記物体上へのパターン形成のための前記移動体による一連の動作を続行するかを判断し、前記一連の動作を続行する場合、その動作中に、異物と対向するヘッドを使わないように、異物を避けて前記計測装置のヘッドを選択する選択装置をさらに備えるパターン形成装置。
【請求項43】
請求項34〜42のいずれか一項に記載のパターン形成装置において、
前記検出装置の検出結果に応じて、警告を発する警告装置を更に備えるパターン形成装置。
【請求項44】
請求項34〜43のいずれか一項に記載のパターン形成装置において、
前記移動体とは異なる、別の移動体を更に備え、
前記検出装置は、前記別の移動体に設けられた計測部材の表面状態をも検出するパターン形成装置。
【請求項45】
請求項34〜44のいずれか一項に記載のパターン形成装置において、
前記移動体の前記物体を保持する側の面と、前記計測部材の表面とは、前記移動体に保持された前記物体の表面と同一面に設定されているパターン形成装置。
【請求項46】
請求項34〜45のいずれか一項に記載のパターン形成装置において、
前記パターン生成装置は、エネルギビームで物体を露光して、前記物体にパターンを形成するパターン形成装置。
【請求項47】
エネルギビームにより物体を露光して、前記物体にパターンを形成する露光装置であって、
前記移動体が前記物体を保持する請求項23〜33のいずれか一項に記載の移動体装置を備える露光装置。
【請求項48】
請求項47に記載の露光装置において、
前記移動体の前記物体を保持する側の面と、前記計測部材の表面とは、前記移動体に保持された前記物体の表面と同一面に設定されている露光装置。
【請求項49】
請求項47又は48に記載の露光装置において、
前記物体に対向して配置された光学部材と、
前記光学部材と前記物体との間に液体を満たして液浸領域を形成する液浸システムと、を更に備え、
前記液浸領域は、前記移動体の移動中に前記計測部材上を通過する露光装置。
【請求項50】
載置された物体を保持して所定の平面内を移動する移動体と、
前記移動体の前記物体が載置された前記平面に平行な一面と対向するヘッドを有し、該ヘッドによって前記移動体の前記一面の前記物体の載置領域外の領域に計測ビームを照射することで、前記移動体の所定方向の位置情報を計測する計測装置と、
前記移動体の前記一面の前記物体の載置領域外の領域の表面状態を検出する検出装置と、を備える移動体装置。
【請求項51】
請求項50に記載の移動体装置と、
前記移動体に載置された物体上にパターンを生成するパターン生成装置と、を備えるパターン形成装置。
【請求項52】
請求項51に記載のパターン形成装置において、
前記パターン生成装置は、エネルギビームを照射して前記物体を露光することで、前記物体上にパターンを形成するパターン形成装置。
【請求項53】
移動体に保持された物体上にパターンを形成するパターン形成工程と、
前記移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の表面状態を検出する検出工程と、を含むパターン形成方法。
【請求項54】
請求項53に記載のパターン形成方法において、
前記検出工程では、前記所定方向を周期方向とする格子が形成されたグレーティング部材の表面状態を検出するパターン形成方法。
【請求項55】
請求項54に記載のパターン形成方法において、
前記検出工程では、前記グレーティング部材表面に光ビームを照射して、前記グレーティング部材表面を介した光ビームを検出するパターン形成方法。
【請求項56】
請求項55に記載のパターン形成方法において、
前記検出工程では、前記光ビームを前記グレーティング部材の表面に対してほぼ平行に照射するパターン形成方法。
【請求項57】
請求項54〜56のいずれか一項に記載のパターン形成方法において、
前記パターン形成工程では、前記グレーティング部材の格子を用いて、前記移動体の位置を検出するパターン形成方法。
【請求項58】
請求項54〜57のいずれか一項に記載のパターン形成方法において、
前記検出工程の処理の少なくとも一部は、前記パターン形成工程の処理と並行して行われるパターン形成方法。
【請求項59】
請求項54〜58のいずれか一項に記載のパターン形成方法において、
前記パターン形成工程に先立ち、前記物体上に配置されたマークの検出を行うマーク検出工程を更に含み、
前記検出工程の処理の少なくとも一部は、前記マーク検出工程の処理と並行して行われるパターン形成方法。
【請求項60】
請求項54〜59のいずれか一項に記載のパターン形成方法において、
前記移動体に保持された物体をアンロードするアンロード工程と、
前記移動体に物体をロードするロード工程と、を更に含み、
前記検出工程の処理の少なくとも一部は、前記アンロード工程から前記ロード工程に移行する間に行われるパターン形成方法。
【請求項61】
請求項54〜60のいずれか一項に記載のパターン形成方法において、
前記グレーティング部材の表面状態は、前記グレーティング部材の表面に異物が存在するか否かを含み、
前記検出工程の検出結果に応じて、前記グレーティング部材表面の異物を除去する異物除去工程を更に含むパターン形成方法。
【請求項62】
請求項54〜61のいずれか一項に記載のパターン形成方法において、
前記検出工程の検出結果に応じて警告を発する警告工程を更に含むパターン形成方法。
【請求項63】
移動体に保持された物体上にパターンを形成するパターン形成工程と、
前記移動体に設けられ、前記移動体の所定方向に関する位置情報の計測に用いられる計測ビームが照射される計測部材の表面に存在する異物を除去する異物除去工程と、を含むパターン形成方法。
【請求項64】
請求項63に記載のパターン形成方法において、
前記計測部材は、所定方向を周期方向とする格子が形成されたグレーティング部材であり、
前記除去工程では、前記グレーティング部材の表面に存在する異物を除去するパターン形成方法。
【請求項65】
請求項63又は64に記載のパターン形成方法において、
前記パターン形成工程では、前記物体に対向して配置された光学部材と、液浸システムにより前記光学部材と前記物体との間に満たされた液体とを介して、エネルギビームが物体上に照射され、
前記異物除去工程では、前記液浸システムの液体により、前記計測部材の表面上存在する異物を除去するパターン形成方法。
【請求項66】
請求項63〜65のいずれか一項に記載のパターン形成方法において、
前記異物除去工程に先立って、前記計測部材の表面上の異物を検出する検出工程を更に含むパターン形成方法。
【請求項67】
請求項66に記載のパターン形成方法において、
前記検出工程では、前記計測部材に光ビームを照射して、前記計測部材を介した光ビームを検出するパターン形成方法。
【請求項68】
請求項53〜67のいずれか一項に記載のパターン形成方法により物体上にパターンを形成する工程と、
パターンが形成された前記物体に処理を施す工程と、を含むデバイス製造方法。
【図1】


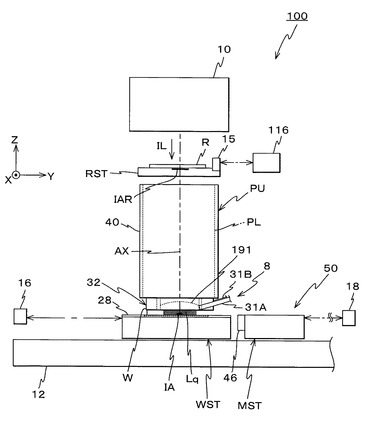
【図2】

【図3】
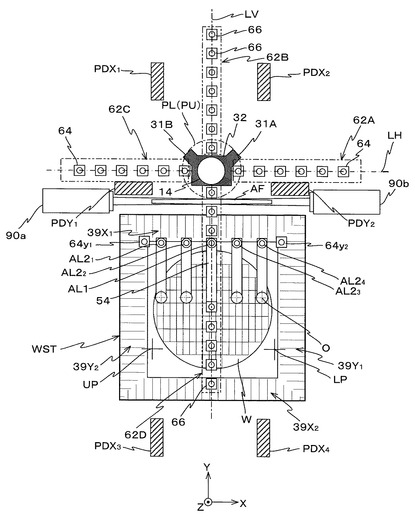
【図4】
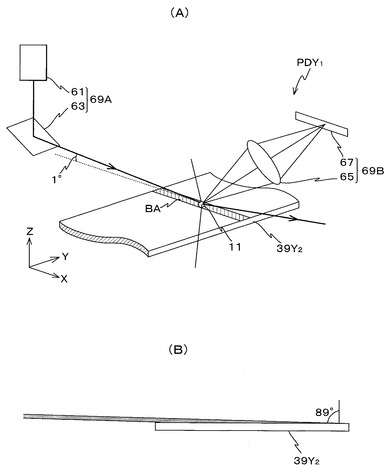
【図5】

【図6】
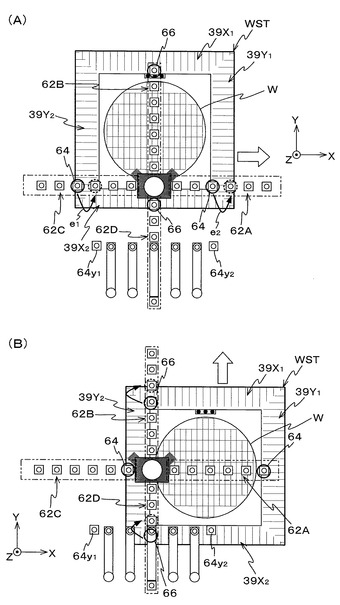
【図7】
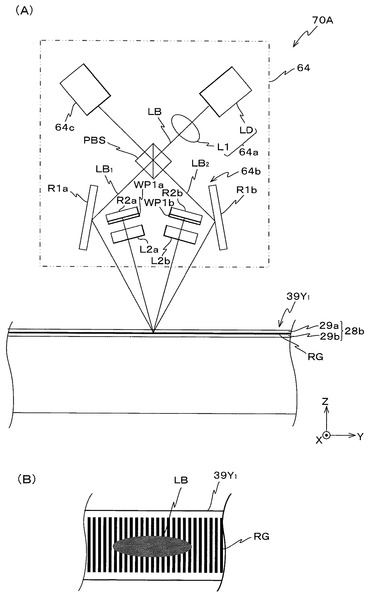
【図8】
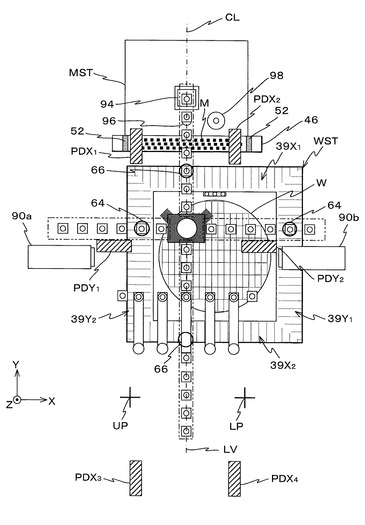
【図9】
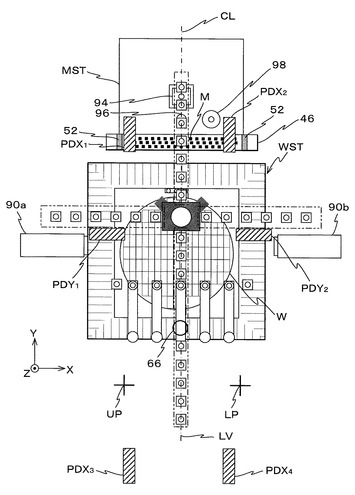
【図10】
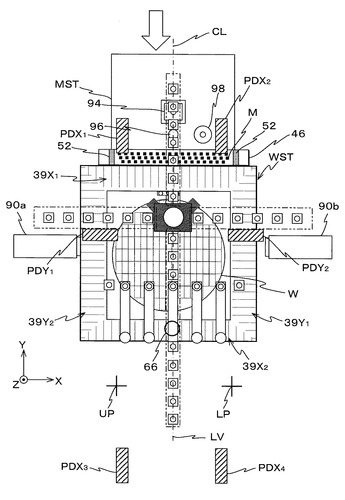
【図11】
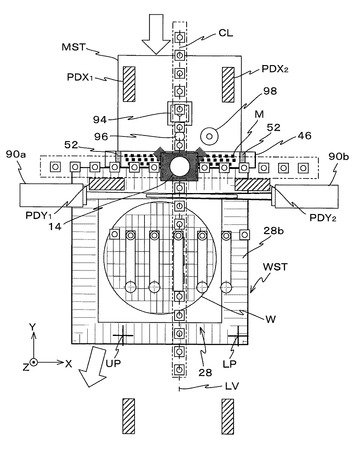
【図12】
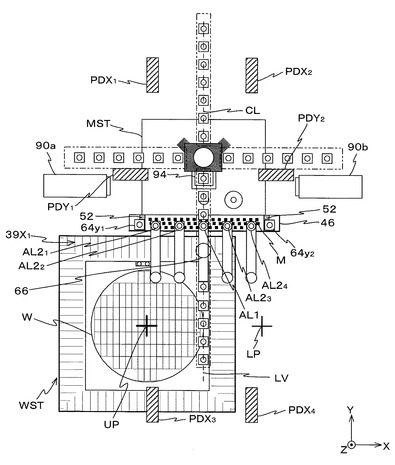
【図13】

【図14】
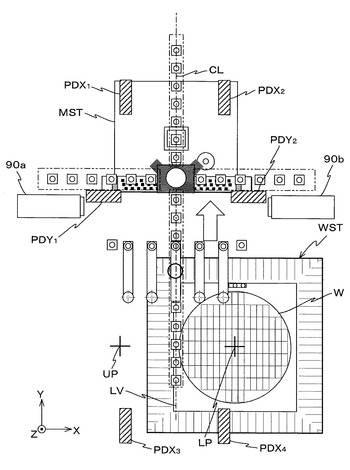
【図15】
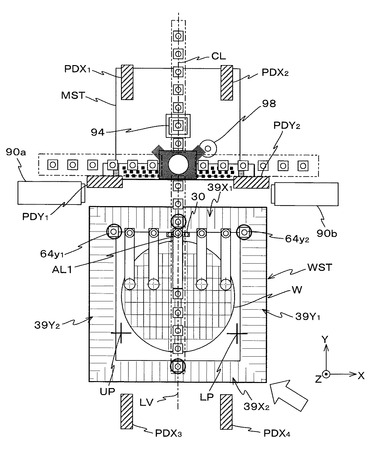
【図16】
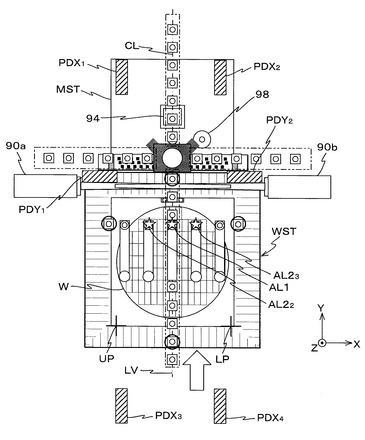
【図17】
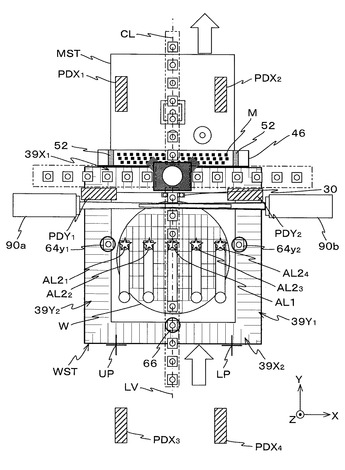
【図18】
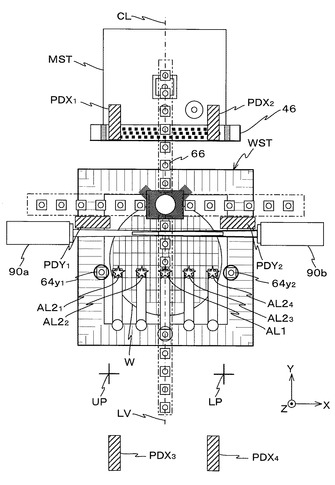
【図19】
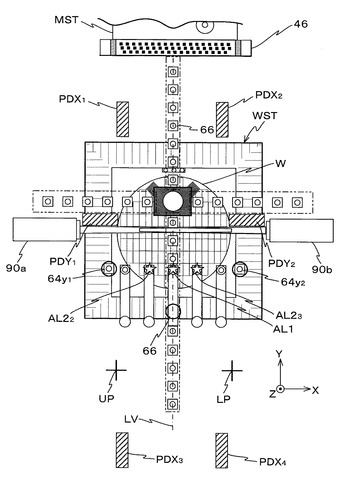
【図20】
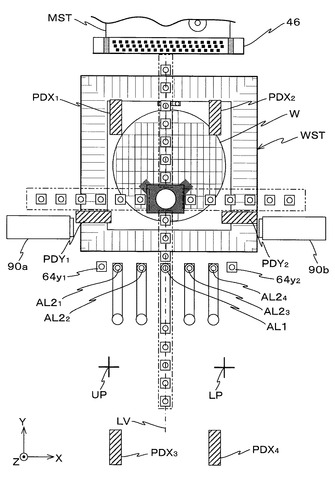
【図21】
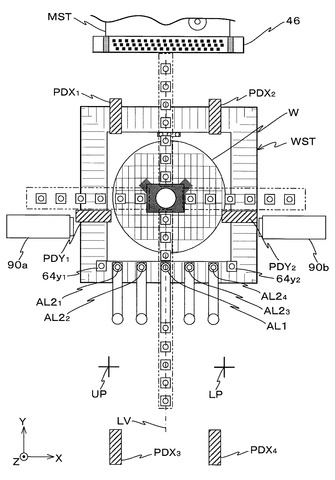
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−248888(P2012−248888A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2012−183144(P2012−183144)
【出願日】平成24年8月22日(2012.8.22)
【分割の表示】特願2008−140826(P2008−140826)の分割
【原出願日】平成20年5月29日(2008.5.29)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成24年8月22日(2012.8.22)
【分割の表示】特願2008−140826(P2008−140826)の分割
【原出願日】平成20年5月29日(2008.5.29)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]