
検出装置の検出領域で障害物を検出する方法
この発明は、障害物の存在する空間をモニタするための方法および装置に関する。このモニタ装置は、通常、少なくとも1つの送信装置と第1および第2の受信装置を有する。この発明の目的は、情報の信頼性を改善する方法および装置を提供することである。この目的のために、第1受信装置よりも送信装置からより離隔している第2受信装置の信号が、その寄生信号部分のために評価される。第1および第2受信装置間の距離があまりに大きくなければ、この第2受信信号に検知される寄生信号部分が、第1信号にも含まれていると仮定することができる。この場合に、望ましいことは、その空間をモニタすることを中止すること、あるいは、少なくとも寄生信号部分が第2受信信号の繰返し評価において検知されない間に既に得られたこの検知のいかなる結果をも破棄することである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検出装置の検出領域で障害物を検出するための方法に関する。更に、本発明は、前記検出装置およびこの方法を実行するためのコンピュータプログラムに関する。最後に、本発明は、前記コンピュータプログラムを有するデータ媒体に関する。
【背景技術】
【0002】
従来の技術では、このタイプの検出装置は基本的に知られている。これらの検出装置は、典型的には、自動車両のバンパーに組み込まれており、自動車両の近い周囲で障害物を検出することによって狭い空間に駐車するための補助手段として用いられる。このような知られた装置は、典型的には、超音波で作動し、少なくとも1つの送信手段と、少なくとも1つの第1のおよび第2の受信手段とを有する。この第2の受信手段は、第1の受信手段よりも、送信手段から一層離隔している。障害物を検出装置の検出領域に検出するために、検出装置の送信手段は、送信信号、例えば超音波信号を各々の送信時点で送信するために形成されている。同様にこの送信時点で、第1の受信手段が第1の受信信号を受信するために始動され、第2の受信手段が第2の受信信号を受信するために始動される。受信信号は、特に、送信信号の、障害物で反射された成分を有することができる。そのとき、検出装置の検出領域における障害物の有無に関して少なくとも第1の受信信号の評価がなされる。障害物が認識されるのは、少なくとも第1の受信信号が、送信信号の、障害物で反射された成分を含むときである。
【0003】
障害物の有無に関して少なくとも第1の受信信号を評価する際に、従来の技術では、典型的には、第1の受信信号が既に送信時点から直ぐにではなく、早くても、各々の受信手段に個々に割り当てられた閾値時点から、なされるように、処置が取られる。この閾値時点は、従来の技術では、典型的には、各々の受信手段に個々に割り当てられた、送信手段との距離によって、規定される。この場合、受信手段に特徴的な閾値時点は、送信手段と受信手段との距離を空間における送信信号の伝播速度で割ることによって、生じる。このことは、この距離に割り当てられた閾値時点の時間的に前に受信される、各々の受信信号の信号成分が、検出される障害物から確実には由来しないことを意味する。従って、検出装置は、物理的理由から、送信手段と受信手段との各々の距離の半分として規定されている音響的な短絡(akustischer Kurzschluss)よりも短い、検出装置との距離を有する障害物を検出することができない。同じ理由から、既に上述したように、個々の閾値時点の後にはじめて受信信号の評価が開始される。
【0004】
しかし、この閾値時点の後でも、受信信号は、少なくとも部分的に、寄生信号(Stoersignal)によって形成されていることができる。寄生信号が、検出装置の検出領域における障害物の有無に関する誤った仮定をもたらすことになるのは、寄生信号が、障害物における送信信号の反射された成分として誤認されるときである。このような誤りは非常に起こり易い。その特別な理由は、寄生信号が、その信号波形の点で、送信信号の反射された成分と必ずしも区別されないからである。
【発明の開示】
【発明が解決しようとする課題】
【0005】
この従来の技術を前提として、本発明の課題は、障害物を検出するための知られた方法ならびにコンピュータプログラムおよびこの方法を実行するための検出装置を、検出装置の検出領域における障害物の有無に関する信頼のある情報が可能であるように、改善することである。
【課題を解決するための手段】
【0006】
この課題は、請求項1に請求された方法によって解決される。この方法は、以下の工程、すなわち、第2の受信信号の少なくとも1つの成分を、空間における寄生信号源の有無を推論させる寄生信号成分の有無に関して好ましくは繰り返し評価すること、および、第2の受信信号に寄生信号成分が検出されないときにのみ、モニタを実行しまたはモニタの結果を利用することを特徴とする。
【0007】
本発明に係わる方法は、障害物の検出と係わらない寄生信号の検出を準備することである。寄生信号が、第1の受信手段から離隔している第2の受信信号によって検出されるとき、不都合なあり得る場合として基本的に仮定されるのは、この寄生信号が、第1の受信信号にも含まれており、従って、障害物の有無に関して受信信号の誤った評価をもたらすであろうことである。従って、このような誤った解釈を防止するために、これらの場合には、障害物の有無に関しての少なくとも第1の受信信号のモニタか、または、所定の中断時間の間のモニタの結果の利用が停止される。換言すれば、本発明では、寄生信号が検出されないときのみ、障害物の有無に関しての第1の受信信号の評価がなされる。このことによって、検出領域における障害物の有無に関する情報が信頼度を増すことができる。
【0008】
第2の受信信号に含まれている寄生信号成分の有無に関しての第2の受信信号の評価が、送信時点と、第2の受信手段と送信手段との空間的な距離によって表わされる閾値時点との間の時間間隔でのみ、なされることは好都合である。何故ならば、このときのみ、第2の受信信号が、送信信号の、障害物で検出された成分を含まず、不可避的に寄生信号成分のみを含むことが保証されているからである。
【0009】
障害物の有無に関する情報の信頼性を一層高めるためには、送信信号の送信、第1のおよび第2の受信信号の受信ならびに寄生信号成分の有無に関しての第2の受信信号の評価を少なくとも1度繰り返すことは好都合である。
【0010】
更に、本発明の上記課題は、コンピュータプログラムによって、この方法を実行するための検出装置によって、ならびにコンピュータプログラムを有するデータ媒体によって解決される。これらの解決策の利点は、請求された方法に関する上記利点に対応する。更に、第2の受信手段と、送信手段との距離を出来る限り大きく選択することは好都合である。
【0011】
更に、第2の受信手段が、他種の物理的な信号、特に寄生信号を検出するために、形成されていることは好都合である。但し、これらの信号が、第1の受信手段による第1の受信信号の受信に悪影響を及ぼすことになる限りにおいてである。
【発明を実施するための最良の形態】
【0012】
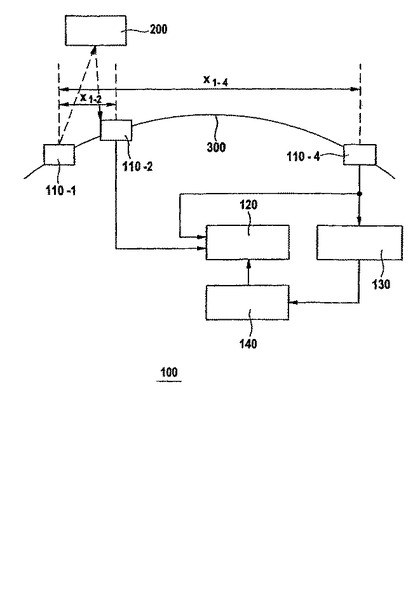
空間をモニタするための、図1に示したモニタ装置100は、送信信号を送信するための少なくとも1つの送信手段110−1と、第1の受信信号を受信するための少なくとも1つの受信手段110−2および第2の受信信号を受信するための第2の受信手段110−4とを有する。モニタ装置100の、本発明に係わる構造にとって重要であるのは、第2の受信手段110−4が、第1の受信手段110−2よりも、送信手段110−1から一層離隔して設けられていることである。距離が異なることの理由付けは、他の物体200を検出するための第2の受信手段110−2が設けられており、他方、寄生信号成分を検出するための第2の受信手段110−4が設けられていることにある。他の理由付けは、下記でなされる。
【0013】
更に、モニタ装置100は、空間における他の物体200の有無に関して少なくとも第1の受信信号を評価するための第1の評価手段120を有する。第1の受信手段110−2の他に、基本的には、他の物体200を検出するための第2の受信手段110−4も選択的に使用することができる。しかし、物理的理由から、この検出のためには、送信手段110−1の出来る限り近くに設けられている複数の受信手段のみが用いられることは好都合である。
【0014】
本発明では、更に、モニタ装置100は、空間における寄生信号源(ここでは図示しない)の有無を推論させる寄生信号成分の有無に関して第2の受信信号を評価するための第2の評価手段130を有する。最後に、モニタ装置100は、第2の評価手段130によって寄生信号が第2の受信信号に検出されなかったときにのみ、少なくとも第1の評価手段を始動させるための、または他の物体の有無に関するモニタの結果を使用可能化するための制御手段140を有する。
【0015】
望ましくない寄生信号を発生させるであろう典型的なノイズソースは、例えば、ブレーキ装置が排気されるときの、トラックのブレーキ装置である。このとき、トラックの周囲には、圧縮空気の大きな変化が生じる。このような変化が、寄生信号として、近くに止まっている乗用車に組み込まれたモニタ装置による、その乗用車の近傍領域のモニタに悪影響を及ぼすのは、特に、このモニタ装置が超音波のベースで作動するときである。
【0016】
各々のモニタ装置は、基本的には、物理的原理に基づいて、特に超音波のベースで作動する。従って、モニタ装置は、特に、物理的に同種の寄生信号によっても、寄生されることがある。従って、物理的に同種の信号を寄生信号として受信するために第2の受信手段が形成されていることは、概して好都合である。とはいっても、モニタ装置は、万一、物理的に他種の寄生信号によっても、寄生されることがある。例えば、超音波をベースにして作動する送信手段および第1の受信手段を有するモニタ装置100が、レーダ信号によっても寄生されることも考えられる。このような寄生信号を効果的に検出するためには、このような他種の物理的な信号を検出するために第2の受信手段110−4が形成されていることが好都合である。
【0017】
図1に図示した送信手段および受信手段110−1・・・110−4の各々は、トランスジューサ手段の一部であってもよい。このようなトランスジューサ手段、例えば超音波変換器は、送信手段としてまたは受信手段として選択的に作動されることができることを特徴とする。図1に関して、このことは、そこに示した複数の手段110−1・・・110−4の各々が、送信手段としてまたは受信手段として選択的に作動されることができること、を意味するであろう。他の物体200の検出のために、および万一の寄生信号成分の検出のために好都合であることは、他の物体を検出するための、および/または寄生信号成分を検出するための方法を好ましくは繰り返す度に、送信手段および受信手段の位置を変えることである。この変化は、好ましくは周期的になされる。このような方法の第1の実施が、送信手段110−1および受信手段110−2・・・110−4のこれまで記述した配置でなされるとき、方法の後続の周期的な繰り返しの度に、位置110−4にあるトランスジューサ手段が、送信手段として作動され、他方では、手段110−1,110−2の位置にある他のトランスジューサ手段が夫々受信手段として作動される。この場合、位置110−1にあるトランスジューサ手段を、寄生信号成分を検出するための第2の受信手段として作動させることは好ましい。何故ならば、このトランスジューサ手段は、位置110−4にあって送信手段として作動されるトランスジューサ手段との最大の距離を有するからである。
【0018】
しかし、このことのための前提は、位置110−1にあるトランスジューサ手段から第2の評価手段130への接続が存在すること(図1には図示せず)である。更に、トランスジューサ手段の常に望ましい操作モードすなわち送信モードまたは受信モードが、制御手段、例えば制御手段140によって、調整されることができることは必要であろう。
【0019】
以下、図1および2を参照して、図1に示されたモニタ装置の機能方法、すなわち空間をモニタするための、本発明に係わる方法を詳述する。
【0020】
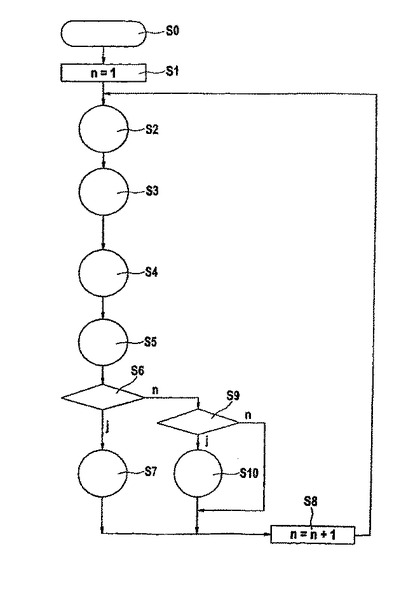
図2には、開始の工程S0後に、工程S1で、異なった変数の初期化がなされることが認められる。このことは、一方では、方法のその都度なされる実行の数を表わす変数nに、好ましくは1が予め付されることを含む。更に、工程S1では、寄生信号の以下に更に詳述される検出が、他の物体の有無に関する空間のモニタの開始の、その時間的に既に前か、開始と同時かまたは開始後にはじめて始めるべきかが、決定される。図2に示した実施の形態に関しては、寄生信号の有無に関するモニタ(工程S5)が始まるとき、空間のモニタ(工程S2ないしS4)が既になされることが例として仮定される。この状態は、以下の実施の形態によって、著しく明示される。
【0021】
工程S1における初期化後に、工程S2では、他の物体200の、特に駐車時の障害物の有無に関する、空間の、特に自動車両の周辺のモニタが、送信手段110−1による、送信信号の、前記空間への送信時点での送信によって、始まる。工程S3では、第1の受信信号を受信するための第1の受信手段110−2が好ましくは同時に始動される。以下に、受信手段110−2によって受信された第1の受信信号が、工程S4で、空間における他の物体200の有無に関して、第1の評価手段120によって評価される。評価手段120が他の物体200を検出するのは、評価手段が、送信手段110−1によって予め送信された送信信号の、他の物体200で反射された成分を、第1の受信信号に見出すときである。
【0022】
第1の送信信号に見出された信号成分が、実際に、他の物体200で反射された信号成分であるか、あるいは、これらの信号成分が、万一、空間にある寄生信号源(図示せず)から由来するのかという問題または決定は、第1の受信信号に受信された信号成分の、信号の波形に基づいては、通常は認識されない。従って、受信された第1の受信信号に、少なくとも部分的に、寄生信号が付けられているか否かに関するメッセージを可能にする追加の情報が用いられることは有益である。
【0023】
第1のこのような指示は、送信信号の送信と第1の受信信号の受信の時点との間で経過する時間によって供される。この時間が、第1の受信手段と送信手段との距離に亘っての送信信号の走行時間によって表わされる第1の閾値時点よりも短いときは、この際に検出された第1の受信信号が、送信信号の、他の物体200で反射された成分であることが確実に除外されることができる。このことは、送信手段110−1によって送信される送信信号が、各々の受信手段110−2に達するために、前記閾値によって表わされている最小時間を必要とする、という物理的な基本原理に基づいている。この最小時間は、送信手段110と受信手段110−2との間の直線的な距離と、空間における送信信号の伝播速度、例えば音速とに依存する。この物理的な基本原理に基づいて、既に従来の技術では、第1の受信信号の、前記閾値時点の前に受信された成分が、他の物体200の有無に関して評価されない。
【0024】
しかし、第1の閾値時点の後でも、第1の受信信号が、少なくとも部分的に、空間における他の物体の有無に関する逆推論の信頼度を著しく低下させる寄生信号成分を含むことはあり得る。従って、特に、この第1の閾値時点の後でも、第1の受信信号が寄生信号成分を含むかまたは少なくとも含むであろうことに関する認識が存するであろうことは望ましい。
【0025】
このような認識を得るために、工程5で、本発明により、第2の受信手段110−4の受信信号が、寄生信号成分の有無に関して評価される。第2の受信信号110−4によって、実際に、万一の寄生信号成分のみが検出されることを保証するために、第2の受信信号は、送信信号が送信される送信時点と、第2の受信手段に個々に割り当てられた第2の閾値時点との間の時間間隔でのみ、評価される。第2の受信手段のための第2の閾値時点は、第1の受信手段110−2に割り当てられた第1の閾値時点に類似して決定される。しかし、前者の閾値時点は、送信時点に関して、第1の受信手段110−2に割り当てられた閾値時点よりも時間的に遅い。何故ならば、第2の受信手段110−4と、送信手段110−1との間の距離が、第1の受信手段110−2と送信手段110−1との間の空間的な距離よりも大きいからである。2つの閾値時点の間の差は、第1の閾値時点の時間的に後に、第1の受信信号における万一の寄生信号の有無に関するメッセージもあり得てなる時間間隔を表わす。この時間間隔が大きくなればなるほど、予測の、あり得る時間間隔は一層大きい。従って、出来る限り大きな時間差の実現のためには、第2の受信手段110−4と、送信手段110−1との間の距離が、第1の受信手段110−2と送信手段110−1との間の距離に比較して出来る限り大きいことは好都合である。実際に、特に、モニタ装置の、バンパー300への組み込みの際に、この割合は、通常、バンパーのまたは自動車両の所定の寸法によって、自動的に制限されている。前記距離が出来る限り大きいほうがよいときでも、この距離は、以下の程には、すなわち、第2の受信信号における寄生信号の検出の際に、第2の受信信号に検出された寄生信号成分が第1の受信信号にも含まれているという、本発明の基礎となる仮定が、第2の受信手段と第1の受信手段との間の余りに大きな距離の故に、多分最早当たっていないほどには、大きくはない。
【0026】
工程S5で実行された評価の際に寄生信号成分が第2の受信信号に含まれていることが、工程S6で確認されるとき、工程S7では、他の物体200の有無に関して第1の受信信号の、工程S4で実行された評価の、その結果が退けられる。何故ならば、この結果が、工程S5およびS6で検出された寄生信号成分によって、ほぼ間違いなく歪められているからである。他方では、寄生信号成分がない故に第2の受信信号が真正または正しいと分類されるので、工程S6では寄生信号が第2の受信信号に確認されないとき、工程S10では、第1の受信信号が評価のために使用可能化される。工程S10に示す使用可能化は、図2における工程S9によって示されるように、追加の条件に結び付けられていてもよい。この追加の条件は、例えば、工程S10に示す使用可能化がなされる前に、第2の受信信号における寄生信号成分の最後の検出後に所定の中断時間が経過したに相違ないという前提であってもよい。工程S10での第1の評価手段120による評価の結果の使用可能化あるいは更なる利用のための結果の中断は、図1で、制御手段140と第1の評価手段120との接続によって示されている。この接続によって、適切な使用可能化信号が第1の評価手段に伝達される。
【0027】
これの代わりに、工程S9に示した条件は、工程S10に示す使用可能化がなされる前に、第2の受信信号の所定数の繰り返された評価に関する、寄生信号成分の最後の検出後に、第2の受信信号に最早寄生信号成分が検出されている必要はないことにある。各々の条件が満たされていないときは、図2に示すように、工程S10がスキップされる。工程S7後にまたは工程S10後に、工程S8では、本発明に係わる方法の実行の数を表わす変数nが、工程S8において、1だけ増加される。このとき、方法が、工程S2の始めに再度分岐する。その目的は、送信信号の新たな送信によって、他の物体200の有無に関して空間のモニタを続行するためである。図1を参照して既に上述したように、この繰り返しの際には、他の位置に位置決めされている送信手段、例えば、今までの実行の際に始動された送信手段110−1を始動することは好都合である。今や後に続く新たな実行の際に好都合であることは、寄生信号成分が依然として第2の受信信号に含まれていることが、工程S5およびS6の繰り返しの際に新たに確定または確認された後に、万一工程S9で条件として選択された中断時間が、その全長において、新たに進行し始めることである。
【0028】
今記述した、本発明に係わる方法が、モニタ装置のためのコンピュータプログラムの形で、実現されることは好ましい。このコンピュータプログラムは、場合によっては、モニタ装置のための他のコンピュータプログラムと共に、データ媒体に記憶されていることができる。データ媒体は、フロッピー(登録商標)・ディスク、コンパクトディスク、フラッシュ・メモリ等である。この場合、データ媒体に記憶されたコンピュータプログラムは、製品として、顧客に販売されることができる。
【0029】
この代わりに、コンピュータプログラムは、電子記憶媒体を用いることなく、電子通信網、特にインターネットを介して、製品として、顧客に渡され販売されることができる。
【0030】
明細書には都合2つの図面が添付されている。
【図面の簡単な説明】
【0031】
【図1】本発明に係わる検出装置の構造を示す。
【図2】本発明に係わる方法を示す。
【技術分野】
【0001】
本発明は、検出装置の検出領域で障害物を検出するための方法に関する。更に、本発明は、前記検出装置およびこの方法を実行するためのコンピュータプログラムに関する。最後に、本発明は、前記コンピュータプログラムを有するデータ媒体に関する。
【背景技術】
【0002】
従来の技術では、このタイプの検出装置は基本的に知られている。これらの検出装置は、典型的には、自動車両のバンパーに組み込まれており、自動車両の近い周囲で障害物を検出することによって狭い空間に駐車するための補助手段として用いられる。このような知られた装置は、典型的には、超音波で作動し、少なくとも1つの送信手段と、少なくとも1つの第1のおよび第2の受信手段とを有する。この第2の受信手段は、第1の受信手段よりも、送信手段から一層離隔している。障害物を検出装置の検出領域に検出するために、検出装置の送信手段は、送信信号、例えば超音波信号を各々の送信時点で送信するために形成されている。同様にこの送信時点で、第1の受信手段が第1の受信信号を受信するために始動され、第2の受信手段が第2の受信信号を受信するために始動される。受信信号は、特に、送信信号の、障害物で反射された成分を有することができる。そのとき、検出装置の検出領域における障害物の有無に関して少なくとも第1の受信信号の評価がなされる。障害物が認識されるのは、少なくとも第1の受信信号が、送信信号の、障害物で反射された成分を含むときである。
【0003】
障害物の有無に関して少なくとも第1の受信信号を評価する際に、従来の技術では、典型的には、第1の受信信号が既に送信時点から直ぐにではなく、早くても、各々の受信手段に個々に割り当てられた閾値時点から、なされるように、処置が取られる。この閾値時点は、従来の技術では、典型的には、各々の受信手段に個々に割り当てられた、送信手段との距離によって、規定される。この場合、受信手段に特徴的な閾値時点は、送信手段と受信手段との距離を空間における送信信号の伝播速度で割ることによって、生じる。このことは、この距離に割り当てられた閾値時点の時間的に前に受信される、各々の受信信号の信号成分が、検出される障害物から確実には由来しないことを意味する。従って、検出装置は、物理的理由から、送信手段と受信手段との各々の距離の半分として規定されている音響的な短絡(akustischer Kurzschluss)よりも短い、検出装置との距離を有する障害物を検出することができない。同じ理由から、既に上述したように、個々の閾値時点の後にはじめて受信信号の評価が開始される。
【0004】
しかし、この閾値時点の後でも、受信信号は、少なくとも部分的に、寄生信号(Stoersignal)によって形成されていることができる。寄生信号が、検出装置の検出領域における障害物の有無に関する誤った仮定をもたらすことになるのは、寄生信号が、障害物における送信信号の反射された成分として誤認されるときである。このような誤りは非常に起こり易い。その特別な理由は、寄生信号が、その信号波形の点で、送信信号の反射された成分と必ずしも区別されないからである。
【発明の開示】
【発明が解決しようとする課題】
【0005】
この従来の技術を前提として、本発明の課題は、障害物を検出するための知られた方法ならびにコンピュータプログラムおよびこの方法を実行するための検出装置を、検出装置の検出領域における障害物の有無に関する信頼のある情報が可能であるように、改善することである。
【課題を解決するための手段】
【0006】
この課題は、請求項1に請求された方法によって解決される。この方法は、以下の工程、すなわち、第2の受信信号の少なくとも1つの成分を、空間における寄生信号源の有無を推論させる寄生信号成分の有無に関して好ましくは繰り返し評価すること、および、第2の受信信号に寄生信号成分が検出されないときにのみ、モニタを実行しまたはモニタの結果を利用することを特徴とする。
【0007】
本発明に係わる方法は、障害物の検出と係わらない寄生信号の検出を準備することである。寄生信号が、第1の受信手段から離隔している第2の受信信号によって検出されるとき、不都合なあり得る場合として基本的に仮定されるのは、この寄生信号が、第1の受信信号にも含まれており、従って、障害物の有無に関して受信信号の誤った評価をもたらすであろうことである。従って、このような誤った解釈を防止するために、これらの場合には、障害物の有無に関しての少なくとも第1の受信信号のモニタか、または、所定の中断時間の間のモニタの結果の利用が停止される。換言すれば、本発明では、寄生信号が検出されないときのみ、障害物の有無に関しての第1の受信信号の評価がなされる。このことによって、検出領域における障害物の有無に関する情報が信頼度を増すことができる。
【0008】
第2の受信信号に含まれている寄生信号成分の有無に関しての第2の受信信号の評価が、送信時点と、第2の受信手段と送信手段との空間的な距離によって表わされる閾値時点との間の時間間隔でのみ、なされることは好都合である。何故ならば、このときのみ、第2の受信信号が、送信信号の、障害物で検出された成分を含まず、不可避的に寄生信号成分のみを含むことが保証されているからである。
【0009】
障害物の有無に関する情報の信頼性を一層高めるためには、送信信号の送信、第1のおよび第2の受信信号の受信ならびに寄生信号成分の有無に関しての第2の受信信号の評価を少なくとも1度繰り返すことは好都合である。
【0010】
更に、本発明の上記課題は、コンピュータプログラムによって、この方法を実行するための検出装置によって、ならびにコンピュータプログラムを有するデータ媒体によって解決される。これらの解決策の利点は、請求された方法に関する上記利点に対応する。更に、第2の受信手段と、送信手段との距離を出来る限り大きく選択することは好都合である。
【0011】
更に、第2の受信手段が、他種の物理的な信号、特に寄生信号を検出するために、形成されていることは好都合である。但し、これらの信号が、第1の受信手段による第1の受信信号の受信に悪影響を及ぼすことになる限りにおいてである。
【発明を実施するための最良の形態】
【0012】
空間をモニタするための、図1に示したモニタ装置100は、送信信号を送信するための少なくとも1つの送信手段110−1と、第1の受信信号を受信するための少なくとも1つの受信手段110−2および第2の受信信号を受信するための第2の受信手段110−4とを有する。モニタ装置100の、本発明に係わる構造にとって重要であるのは、第2の受信手段110−4が、第1の受信手段110−2よりも、送信手段110−1から一層離隔して設けられていることである。距離が異なることの理由付けは、他の物体200を検出するための第2の受信手段110−2が設けられており、他方、寄生信号成分を検出するための第2の受信手段110−4が設けられていることにある。他の理由付けは、下記でなされる。
【0013】
更に、モニタ装置100は、空間における他の物体200の有無に関して少なくとも第1の受信信号を評価するための第1の評価手段120を有する。第1の受信手段110−2の他に、基本的には、他の物体200を検出するための第2の受信手段110−4も選択的に使用することができる。しかし、物理的理由から、この検出のためには、送信手段110−1の出来る限り近くに設けられている複数の受信手段のみが用いられることは好都合である。
【0014】
本発明では、更に、モニタ装置100は、空間における寄生信号源(ここでは図示しない)の有無を推論させる寄生信号成分の有無に関して第2の受信信号を評価するための第2の評価手段130を有する。最後に、モニタ装置100は、第2の評価手段130によって寄生信号が第2の受信信号に検出されなかったときにのみ、少なくとも第1の評価手段を始動させるための、または他の物体の有無に関するモニタの結果を使用可能化するための制御手段140を有する。
【0015】
望ましくない寄生信号を発生させるであろう典型的なノイズソースは、例えば、ブレーキ装置が排気されるときの、トラックのブレーキ装置である。このとき、トラックの周囲には、圧縮空気の大きな変化が生じる。このような変化が、寄生信号として、近くに止まっている乗用車に組み込まれたモニタ装置による、その乗用車の近傍領域のモニタに悪影響を及ぼすのは、特に、このモニタ装置が超音波のベースで作動するときである。
【0016】
各々のモニタ装置は、基本的には、物理的原理に基づいて、特に超音波のベースで作動する。従って、モニタ装置は、特に、物理的に同種の寄生信号によっても、寄生されることがある。従って、物理的に同種の信号を寄生信号として受信するために第2の受信手段が形成されていることは、概して好都合である。とはいっても、モニタ装置は、万一、物理的に他種の寄生信号によっても、寄生されることがある。例えば、超音波をベースにして作動する送信手段および第1の受信手段を有するモニタ装置100が、レーダ信号によっても寄生されることも考えられる。このような寄生信号を効果的に検出するためには、このような他種の物理的な信号を検出するために第2の受信手段110−4が形成されていることが好都合である。
【0017】
図1に図示した送信手段および受信手段110−1・・・110−4の各々は、トランスジューサ手段の一部であってもよい。このようなトランスジューサ手段、例えば超音波変換器は、送信手段としてまたは受信手段として選択的に作動されることができることを特徴とする。図1に関して、このことは、そこに示した複数の手段110−1・・・110−4の各々が、送信手段としてまたは受信手段として選択的に作動されることができること、を意味するであろう。他の物体200の検出のために、および万一の寄生信号成分の検出のために好都合であることは、他の物体を検出するための、および/または寄生信号成分を検出するための方法を好ましくは繰り返す度に、送信手段および受信手段の位置を変えることである。この変化は、好ましくは周期的になされる。このような方法の第1の実施が、送信手段110−1および受信手段110−2・・・110−4のこれまで記述した配置でなされるとき、方法の後続の周期的な繰り返しの度に、位置110−4にあるトランスジューサ手段が、送信手段として作動され、他方では、手段110−1,110−2の位置にある他のトランスジューサ手段が夫々受信手段として作動される。この場合、位置110−1にあるトランスジューサ手段を、寄生信号成分を検出するための第2の受信手段として作動させることは好ましい。何故ならば、このトランスジューサ手段は、位置110−4にあって送信手段として作動されるトランスジューサ手段との最大の距離を有するからである。
【0018】
しかし、このことのための前提は、位置110−1にあるトランスジューサ手段から第2の評価手段130への接続が存在すること(図1には図示せず)である。更に、トランスジューサ手段の常に望ましい操作モードすなわち送信モードまたは受信モードが、制御手段、例えば制御手段140によって、調整されることができることは必要であろう。
【0019】
以下、図1および2を参照して、図1に示されたモニタ装置の機能方法、すなわち空間をモニタするための、本発明に係わる方法を詳述する。
【0020】
図2には、開始の工程S0後に、工程S1で、異なった変数の初期化がなされることが認められる。このことは、一方では、方法のその都度なされる実行の数を表わす変数nに、好ましくは1が予め付されることを含む。更に、工程S1では、寄生信号の以下に更に詳述される検出が、他の物体の有無に関する空間のモニタの開始の、その時間的に既に前か、開始と同時かまたは開始後にはじめて始めるべきかが、決定される。図2に示した実施の形態に関しては、寄生信号の有無に関するモニタ(工程S5)が始まるとき、空間のモニタ(工程S2ないしS4)が既になされることが例として仮定される。この状態は、以下の実施の形態によって、著しく明示される。
【0021】
工程S1における初期化後に、工程S2では、他の物体200の、特に駐車時の障害物の有無に関する、空間の、特に自動車両の周辺のモニタが、送信手段110−1による、送信信号の、前記空間への送信時点での送信によって、始まる。工程S3では、第1の受信信号を受信するための第1の受信手段110−2が好ましくは同時に始動される。以下に、受信手段110−2によって受信された第1の受信信号が、工程S4で、空間における他の物体200の有無に関して、第1の評価手段120によって評価される。評価手段120が他の物体200を検出するのは、評価手段が、送信手段110−1によって予め送信された送信信号の、他の物体200で反射された成分を、第1の受信信号に見出すときである。
【0022】
第1の送信信号に見出された信号成分が、実際に、他の物体200で反射された信号成分であるか、あるいは、これらの信号成分が、万一、空間にある寄生信号源(図示せず)から由来するのかという問題または決定は、第1の受信信号に受信された信号成分の、信号の波形に基づいては、通常は認識されない。従って、受信された第1の受信信号に、少なくとも部分的に、寄生信号が付けられているか否かに関するメッセージを可能にする追加の情報が用いられることは有益である。
【0023】
第1のこのような指示は、送信信号の送信と第1の受信信号の受信の時点との間で経過する時間によって供される。この時間が、第1の受信手段と送信手段との距離に亘っての送信信号の走行時間によって表わされる第1の閾値時点よりも短いときは、この際に検出された第1の受信信号が、送信信号の、他の物体200で反射された成分であることが確実に除外されることができる。このことは、送信手段110−1によって送信される送信信号が、各々の受信手段110−2に達するために、前記閾値によって表わされている最小時間を必要とする、という物理的な基本原理に基づいている。この最小時間は、送信手段110と受信手段110−2との間の直線的な距離と、空間における送信信号の伝播速度、例えば音速とに依存する。この物理的な基本原理に基づいて、既に従来の技術では、第1の受信信号の、前記閾値時点の前に受信された成分が、他の物体200の有無に関して評価されない。
【0024】
しかし、第1の閾値時点の後でも、第1の受信信号が、少なくとも部分的に、空間における他の物体の有無に関する逆推論の信頼度を著しく低下させる寄生信号成分を含むことはあり得る。従って、特に、この第1の閾値時点の後でも、第1の受信信号が寄生信号成分を含むかまたは少なくとも含むであろうことに関する認識が存するであろうことは望ましい。
【0025】
このような認識を得るために、工程5で、本発明により、第2の受信手段110−4の受信信号が、寄生信号成分の有無に関して評価される。第2の受信信号110−4によって、実際に、万一の寄生信号成分のみが検出されることを保証するために、第2の受信信号は、送信信号が送信される送信時点と、第2の受信手段に個々に割り当てられた第2の閾値時点との間の時間間隔でのみ、評価される。第2の受信手段のための第2の閾値時点は、第1の受信手段110−2に割り当てられた第1の閾値時点に類似して決定される。しかし、前者の閾値時点は、送信時点に関して、第1の受信手段110−2に割り当てられた閾値時点よりも時間的に遅い。何故ならば、第2の受信手段110−4と、送信手段110−1との間の距離が、第1の受信手段110−2と送信手段110−1との間の空間的な距離よりも大きいからである。2つの閾値時点の間の差は、第1の閾値時点の時間的に後に、第1の受信信号における万一の寄生信号の有無に関するメッセージもあり得てなる時間間隔を表わす。この時間間隔が大きくなればなるほど、予測の、あり得る時間間隔は一層大きい。従って、出来る限り大きな時間差の実現のためには、第2の受信手段110−4と、送信手段110−1との間の距離が、第1の受信手段110−2と送信手段110−1との間の距離に比較して出来る限り大きいことは好都合である。実際に、特に、モニタ装置の、バンパー300への組み込みの際に、この割合は、通常、バンパーのまたは自動車両の所定の寸法によって、自動的に制限されている。前記距離が出来る限り大きいほうがよいときでも、この距離は、以下の程には、すなわち、第2の受信信号における寄生信号の検出の際に、第2の受信信号に検出された寄生信号成分が第1の受信信号にも含まれているという、本発明の基礎となる仮定が、第2の受信手段と第1の受信手段との間の余りに大きな距離の故に、多分最早当たっていないほどには、大きくはない。
【0026】
工程S5で実行された評価の際に寄生信号成分が第2の受信信号に含まれていることが、工程S6で確認されるとき、工程S7では、他の物体200の有無に関して第1の受信信号の、工程S4で実行された評価の、その結果が退けられる。何故ならば、この結果が、工程S5およびS6で検出された寄生信号成分によって、ほぼ間違いなく歪められているからである。他方では、寄生信号成分がない故に第2の受信信号が真正または正しいと分類されるので、工程S6では寄生信号が第2の受信信号に確認されないとき、工程S10では、第1の受信信号が評価のために使用可能化される。工程S10に示す使用可能化は、図2における工程S9によって示されるように、追加の条件に結び付けられていてもよい。この追加の条件は、例えば、工程S10に示す使用可能化がなされる前に、第2の受信信号における寄生信号成分の最後の検出後に所定の中断時間が経過したに相違ないという前提であってもよい。工程S10での第1の評価手段120による評価の結果の使用可能化あるいは更なる利用のための結果の中断は、図1で、制御手段140と第1の評価手段120との接続によって示されている。この接続によって、適切な使用可能化信号が第1の評価手段に伝達される。
【0027】
これの代わりに、工程S9に示した条件は、工程S10に示す使用可能化がなされる前に、第2の受信信号の所定数の繰り返された評価に関する、寄生信号成分の最後の検出後に、第2の受信信号に最早寄生信号成分が検出されている必要はないことにある。各々の条件が満たされていないときは、図2に示すように、工程S10がスキップされる。工程S7後にまたは工程S10後に、工程S8では、本発明に係わる方法の実行の数を表わす変数nが、工程S8において、1だけ増加される。このとき、方法が、工程S2の始めに再度分岐する。その目的は、送信信号の新たな送信によって、他の物体200の有無に関して空間のモニタを続行するためである。図1を参照して既に上述したように、この繰り返しの際には、他の位置に位置決めされている送信手段、例えば、今までの実行の際に始動された送信手段110−1を始動することは好都合である。今や後に続く新たな実行の際に好都合であることは、寄生信号成分が依然として第2の受信信号に含まれていることが、工程S5およびS6の繰り返しの際に新たに確定または確認された後に、万一工程S9で条件として選択された中断時間が、その全長において、新たに進行し始めることである。
【0028】
今記述した、本発明に係わる方法が、モニタ装置のためのコンピュータプログラムの形で、実現されることは好ましい。このコンピュータプログラムは、場合によっては、モニタ装置のための他のコンピュータプログラムと共に、データ媒体に記憶されていることができる。データ媒体は、フロッピー(登録商標)・ディスク、コンパクトディスク、フラッシュ・メモリ等である。この場合、データ媒体に記憶されたコンピュータプログラムは、製品として、顧客に販売されることができる。
【0029】
この代わりに、コンピュータプログラムは、電子記憶媒体を用いることなく、電子通信網、特にインターネットを介して、製品として、顧客に渡され販売されることができる。
【0030】
明細書には都合2つの図面が添付されている。
【図面の簡単な説明】
【0031】
【図1】本発明に係わる検出装置の構造を示す。
【図2】本発明に係わる方法を示す。
【特許請求の範囲】
【請求項1】
空間、特に自動車両の周囲を、他の物体(200)、特に障害物の有無に関し、モニタ装置(100)を用いてモニタする方法であって、このモニタ装置は、少なくとも1つの送信手段(110−1)と、少なくとも1つの第1の受信手段(110−2)および第2の受信手段(110−4)とを有し、この第2の受信手段(110−4)は、前記第1の受信手段よりも、前記送信手段(110−1)から一層離隔しており、以下の工程、すなわち、少なくとも1つの第2の受信信号を第2の受信手段(110−4)によって受信することを有する方法において、
前記第2の受信信号の少なくとも1つの成分を、前記空間に寄生信号源の有無を推論させる寄生信号成分の有無に関して好ましくは繰り返し評価すること(工程S5)、および、
前記第2の受信信号に寄生信号成分が検出されないときにのみ、モニタを実行しまたはモニタの結果を利用すること(工程S6,S10)を特徴とする方法。
【請求項2】
前記寄生信号成分の検出のために評価された、前記第2の受信信号の成分は、前記第2の受信手段と前記送信手段との空間的距離によって表わされる閾値時点の時間的に前に、受信されることを特徴とする請求項1に記載の方法。
【請求項3】
前記空間のモニタまたはモニタの結果の利用は、モニタ中に実際にある第2の受信信号をベースにして寄生信号成分の最後になされた検出の、その後に始まる所定の中断時間が経過した後にはじめて、実行されること(工程S9)を特徴とする前記すべての請求項のいずれか1に記載の方法。
【請求項4】
前記中断時間は、寄生信号成分の繰り返しの検出の度に、新たに全長で進行し始めることを特徴とする請求項3に記載の方法。
【請求項5】
前記空間のモニタまたはモニタの結果の利用は、前記第2の受信信号の評価の所定数の繰り返しの際に、寄生成分が検出されなかった後にはじめて、なされること(工程S9)を特徴とする請求項1または2に記載の方法。
【請求項6】
前記すべての請求項のいずれか1に記載の方法において、
前記他の物体の検出が、好ましくは繰り返し、以下の工程を有することを特徴とする。
送信信号を、前記送信手段(110−1)によって、送信時点で前記空間へ送信すること(S2)、
第1の受信信号を前記第1の受信手段(110−2)によっておよび前記第2の受信信号を前記第2の受信手段(110−4)によって受信すること(S3)、および、
少なくとも前記第1の受信信号を、前記空間における前記他の物体(200)であって、場合によっては、この他の物体で反射された、前記送信信号の成分によって、前記複数の受信信号の少なくとも1に表わされるものの有無に関し評価すること(工程S4)。
【請求項7】
前記モニタ装置(100)が、割り当てられた夫々少なくとも1つの第1の受信手段(110−2)および第2の受信手段(110−4)を有する複数の送信手段(110−1)を具備するとき、これらの割り当てられた受信手段を有するこれらの個々の送信手段が、好ましくは周期的に、前記他の物体(200)の検出のまたは前記第2の受信信号の利用の個々の繰り返しの際に、交互に始動されることを特徴とする方法。
【請求項8】
プログラムコードを有する、モニタ装置(100)のためのコンピュータプログラムにおいて、このプログラムコードは、請求項1ないし7のいずれか1に記載の方法を実行するために形成されていることを特徴とするコンピュータプログラム。
【請求項9】
請求項8に記載のコンピュータプログラムを有するデータ媒体。
【請求項10】
空間、特に自動車両の周囲を、他の物体(200)、特に障害物の有無に関してモニタするためのモニタ装置(100)であって、
送信信号を少なくとも1つの送信時点で前記空間へ送信するための少なくとも1つの送信手段(110−1)と、
第1の受信信号を受信するための少なくとも1つの第1の受信手段(110−2)および第2の受信信号を受信するための第2の受信手段(110−4)と、
前記空間における前記他の物体(200)の有無に関して少なくとも前記第1の受信信号を評価するための第1の評価手段(120)とを具備し、前記第2の受信手段(110−1)は、前記送信手段(110−1)から、前記第1の受信手段(110−2)よりも一層離隔して設けられてなるモニタ装置において、
前記空間における寄生信号源の有無を推論させる寄生信号成分の有無に関して前記第2の受信信号の少なくとも1つの成分を好ましくは繰り返し評価するための第2の評価手段(130)と、
前記第2の評価手段(130)によって寄生信号が前記第2の受信信号に検出されなかったときにのみ、少なくとも前記第1の評価手段(120)を始動させるための、または前記他の物体の有無に関するモニタの結果を使用可能化するための制御手段(140)とを具備することを特徴とするモニタ装置。
【請求項11】
前記第2の受信手段(110−4)は、前記第1の受信手段と同様に、物理的に同種のまたは物理的に他種の信号を受信するために、形成されていることを特徴とする請求項10に記載のモニタ装置。
【請求項12】
前記送信手段および/または受信手段は、少なくとも部分的に、夫々、送信手段としてまたは受信手段として選択的に作動されることができるトランスジューサ手段の、その部分として形成されていることを特徴とする請求項10または11に記載のモニタ装置。
【請求項1】
空間、特に自動車両の周囲を、他の物体(200)、特に障害物の有無に関し、モニタ装置(100)を用いてモニタする方法であって、このモニタ装置は、少なくとも1つの送信手段(110−1)と、少なくとも1つの第1の受信手段(110−2)および第2の受信手段(110−4)とを有し、この第2の受信手段(110−4)は、前記第1の受信手段よりも、前記送信手段(110−1)から一層離隔しており、以下の工程、すなわち、少なくとも1つの第2の受信信号を第2の受信手段(110−4)によって受信することを有する方法において、
前記第2の受信信号の少なくとも1つの成分を、前記空間に寄生信号源の有無を推論させる寄生信号成分の有無に関して好ましくは繰り返し評価すること(工程S5)、および、
前記第2の受信信号に寄生信号成分が検出されないときにのみ、モニタを実行しまたはモニタの結果を利用すること(工程S6,S10)を特徴とする方法。
【請求項2】
前記寄生信号成分の検出のために評価された、前記第2の受信信号の成分は、前記第2の受信手段と前記送信手段との空間的距離によって表わされる閾値時点の時間的に前に、受信されることを特徴とする請求項1に記載の方法。
【請求項3】
前記空間のモニタまたはモニタの結果の利用は、モニタ中に実際にある第2の受信信号をベースにして寄生信号成分の最後になされた検出の、その後に始まる所定の中断時間が経過した後にはじめて、実行されること(工程S9)を特徴とする前記すべての請求項のいずれか1に記載の方法。
【請求項4】
前記中断時間は、寄生信号成分の繰り返しの検出の度に、新たに全長で進行し始めることを特徴とする請求項3に記載の方法。
【請求項5】
前記空間のモニタまたはモニタの結果の利用は、前記第2の受信信号の評価の所定数の繰り返しの際に、寄生成分が検出されなかった後にはじめて、なされること(工程S9)を特徴とする請求項1または2に記載の方法。
【請求項6】
前記すべての請求項のいずれか1に記載の方法において、
前記他の物体の検出が、好ましくは繰り返し、以下の工程を有することを特徴とする。
送信信号を、前記送信手段(110−1)によって、送信時点で前記空間へ送信すること(S2)、
第1の受信信号を前記第1の受信手段(110−2)によっておよび前記第2の受信信号を前記第2の受信手段(110−4)によって受信すること(S3)、および、
少なくとも前記第1の受信信号を、前記空間における前記他の物体(200)であって、場合によっては、この他の物体で反射された、前記送信信号の成分によって、前記複数の受信信号の少なくとも1に表わされるものの有無に関し評価すること(工程S4)。
【請求項7】
前記モニタ装置(100)が、割り当てられた夫々少なくとも1つの第1の受信手段(110−2)および第2の受信手段(110−4)を有する複数の送信手段(110−1)を具備するとき、これらの割り当てられた受信手段を有するこれらの個々の送信手段が、好ましくは周期的に、前記他の物体(200)の検出のまたは前記第2の受信信号の利用の個々の繰り返しの際に、交互に始動されることを特徴とする方法。
【請求項8】
プログラムコードを有する、モニタ装置(100)のためのコンピュータプログラムにおいて、このプログラムコードは、請求項1ないし7のいずれか1に記載の方法を実行するために形成されていることを特徴とするコンピュータプログラム。
【請求項9】
請求項8に記載のコンピュータプログラムを有するデータ媒体。
【請求項10】
空間、特に自動車両の周囲を、他の物体(200)、特に障害物の有無に関してモニタするためのモニタ装置(100)であって、
送信信号を少なくとも1つの送信時点で前記空間へ送信するための少なくとも1つの送信手段(110−1)と、
第1の受信信号を受信するための少なくとも1つの第1の受信手段(110−2)および第2の受信信号を受信するための第2の受信手段(110−4)と、
前記空間における前記他の物体(200)の有無に関して少なくとも前記第1の受信信号を評価するための第1の評価手段(120)とを具備し、前記第2の受信手段(110−1)は、前記送信手段(110−1)から、前記第1の受信手段(110−2)よりも一層離隔して設けられてなるモニタ装置において、
前記空間における寄生信号源の有無を推論させる寄生信号成分の有無に関して前記第2の受信信号の少なくとも1つの成分を好ましくは繰り返し評価するための第2の評価手段(130)と、
前記第2の評価手段(130)によって寄生信号が前記第2の受信信号に検出されなかったときにのみ、少なくとも前記第1の評価手段(120)を始動させるための、または前記他の物体の有無に関するモニタの結果を使用可能化するための制御手段(140)とを具備することを特徴とするモニタ装置。
【請求項11】
前記第2の受信手段(110−4)は、前記第1の受信手段と同様に、物理的に同種のまたは物理的に他種の信号を受信するために、形成されていることを特徴とする請求項10に記載のモニタ装置。
【請求項12】
前記送信手段および/または受信手段は、少なくとも部分的に、夫々、送信手段としてまたは受信手段として選択的に作動されることができるトランスジューサ手段の、その部分として形成されていることを特徴とする請求項10または11に記載のモニタ装置。
【図1】


【図2】
【図2】
【公表番号】特表2007−510969(P2007−510969A)
【公表日】平成19年4月26日(2007.4.26)
【国際特許分類】
【出願番号】特願2006−529989(P2006−529989)
【出願日】平成16年9月16日(2004.9.16)
【国際出願番号】PCT/EP2004/010359
【国際公開番号】WO2005/036206
【国際公開日】平成17年4月21日(2005.4.21)
【出願人】(303049337)バレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハー (18)
【Fターム(参考)】
【公表日】平成19年4月26日(2007.4.26)
【国際特許分類】
【出願日】平成16年9月16日(2004.9.16)
【国際出願番号】PCT/EP2004/010359
【国際公開番号】WO2005/036206
【国際公開日】平成17年4月21日(2005.4.21)
【出願人】(303049337)バレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハー (18)
【Fターム(参考)】
[ Back to top ]