
検品装置、検品システム、検品方法及びプログラム
【課題】 多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能な技術を提供する。
【解決手段】 検品装置は、撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定する品名特定手段と、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する数量計算手段と、を含む。
【解決手段】 検品装置は、撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定する品名特定手段と、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する数量計算手段と、を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷降ろし又は積み込み作業時における入荷検品又は出荷検品を自動化する検品装置、検品方法及びプログラムに関する。
【背景技術】
【0002】
荷降ろしや荷物の積み込み作業時における検品作業を、人手によらずに自動化して行う技術が知られている。
【0003】
特許文献1には、特徴的な図柄を有する既知の対象物を、搬送中に検品するための画像処理検品装置が開示されている。特許文献1に記載の画像処理装置において、撮像手段は、検品対象物を撮影する。画像メモリは、撮影された画像データを取り込む。抽出手段は、該画像メモリ上の画像データから、検品対象物に含まれる特徴的な塊状図形を抽出する。特徴量測定手段は、該抽出された各塊状図形の特徴量を測定する。特徴量ヒストグラムパターン作成手段は、求めた特徴量の値の組み合わせにより検品対象物の特徴量ヒストグラムパターンを作成する。識別手段は、この作成した特徴量ヒストグラムパターンを用いて、検品対象物を識別する。
【0004】
特許文献1に記載の画像処理検品装置は、上記構成を採用することで、搬送系の影響によって検品対象物が回転や位置ずれを生じた場合でも、簡便な方法で、高い認識精度と高速性を保証する。
【0005】
また、特許文献2には、配送元での出荷検品作業に用いられる配送元端末と、配送先での入荷検品作業に用いられる配送先端末とからなり、配送する商品を収納する収納箱にRFIDタグを設けた入出荷検品システムが開示されている。特許文献2に記載の入出荷検品システムの配送元端末において、箱番号入力手段は、収納箱の箱番号を入力する。商品番号入力手段は、収納箱に収納する前記商品の商品番号および数量を入力する。配送データ書き込み手段は、箱番号入力手段によって入力された前記箱番号と前記商品番号入力手段によって入力された商品番号および数量とを配送データとしてRFIDタグに書き込む。ASNデータ作成手段は、箱番号入力手段によって入力された箱番号と商品番号入力手段によって入力された商品番号および数量とを少なくとも含むASNデータを作成する。ASNデータ送信手段は、ASNデータ作成手段によって作成されたASNデータを配送先端末に送信する。
【0006】
特許文献2に記載の入出荷検品システムは、上記構成を採用することで、収納箱に収納されている商品の詳細データをネットワーク上のホストコンピュータによって一元管理する必要をなくす等の効果を奏し、入荷検品作業の手間と時間とを削減する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平08−094335
【特許文献2】特開2006−103929
【発明の概要】
【発明が解決しようとする課題】
【0008】
検品作業は、(1)品名の特定、及び(2)数量の計算、という2つの作業から成り立っている。特許文献1に記載の画像処理検品装置によれば、撮影方向等の一定の条件を満たした画像を撮影できることを前提として、特徴量ヒストグラムパターンを用いて、検品対象物を識別することで品名を特定することができる。しかしながら該画像処理検品装置のみでは、品名を特定することはできても(2)の数量を計算する作業をすることができず、検品対象物の数量の計算は人手によらざるを得ない。
【0009】
特許文献2に記載の入出荷検品システムによれば、上記(1)及び(2)の作業を、人手によらずに自動化して行うことができる。しかしながら特許文献2に記載の入出荷検品システムを実施するためには、配送する多数の商品の収納箱にRFIDタグを取り付ける等の必要があるため、取り付け作業にかかる人的なコストや、RFIDタグ自体の金銭的なコスト等、多くのコストがかかる。
【0010】
以上より、本発明の目的は、多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能な技術を提供することである。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明における検品装置は、撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定する品名特定手段と、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する数量計算手段と、を含む。
【0012】
また、上記目的を達成するため、本発明における検品システムは、画像を撮影する一又は二以上の画像撮影手段と、検品装置と、前記検品装置において特定した荷物の品名と、計算した荷物の数量を出力する出力手段と、を含む。
【0013】
また、上記目的を達成するため、本発明における検品方法は、撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する。
【0014】
また、上記目的を達成するため、本発明におけるプログラムは、撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する、処理をコンピュータに実行させる。
【発明の効果】
【0015】
本発明によれば、多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能となる。
【図面の簡単な説明】
【0016】
【図1】正面画像及び側面画像の定義について説明するための図である。
【図2】本発明の第1実施形態に係る検品システム1000の構成を示すブロック図である。
【図3】本発明の第1実施形態に係る検品システム1000の動作を示すフローチャート図である。
【図4】抽出した移動物体領域300の側面画像のイメージ図である。
【図5】移動物体領域300の側面画像中におけるパレット領域310及び荷物存在領域320を現すイメージ図である。
【図6】図5で示すイメージ図において、さらに特定した荷物領域330を現すイメージ図である。
【図7】荷物特徴量DB245が格納する、荷物画像の特徴量と品名とを関連付けたデータの例である。
【図8】積付方法DB255が格納する、荷物の品名と、荷物の梱包の大きさと、荷物の積み付け方法の番号とを関連付けたデータの例である。
【図9】図8に加えて、積付方法DB255が格納する荷物の積み付けに関するデータの例である。
【図10】第2実施形態に係る検品システム2000の構成を示すブロック図である。
【図11】移動物体領域の正面画像において、荷物領域330を特定したイメージ図である。
【図12】検品装置500の構成を示すブロック図である。
【図13】検品装置200のハードウェア構成の一例を示すブロック図である。
【発明を実施するための形態】
【0017】
<第1実施形態>
まず、本発明の実施形態の理解を容易にするために、本発明の背景を詳細に説明する。
【0018】
検品作業は、(1)品名の特定、(2)数量の計算、という2つの作業から成り立っている。(1)又は(2)の作業に関連する技術が多数存在する。例えば、品名を特定する技術として、画像認識技術や、バーコードリーダ又はRFIDタグを用いた技術等が存在する。また、数量を計算する技術として、RFIDタグを用いた技術や、重量検知の技術等が存在する。特許文献2に記載のように、RFIDタグは、(1)及び(2)の作業に利用することができるが、現実の運用では、RFIDタグの取り付け及び取り外しの作業にかかる人的なコストが問題になる。また、RFIDタグ自体や読取アンテナの設置工事等にかかる金銭的なコストが多額であり、問題となっていた。
【0019】
コストを抑えるために、画像認識技術の活用を考えた場合、撮影方向等の一定の条件を満たした画像、例えば正面から撮影した画像を用いることができれば、品名を特定することはできる。しかしながら、検品作業を行う現場の環境によっては、必ずしも条件の良い画像が撮影できるとは限らない。また、検品作業を行う現場によっては、撮影距離が一定に保てず、画像上の検品対象物の大きさが変動することから、正確な数量を計算することができない。
【0020】
上述の課題は、特許文献1又は特許文献2によっても解決することができない。
【0021】
以下に説明される本発明の第1実施形態によれば、多くのコストをかけることなく、検品作業を人手によらずに自動化して行うことが可能となる。
【0022】
まず、図1を用いて、本実施形態における正面画像及び側面画像の定義について説明する。
【0023】
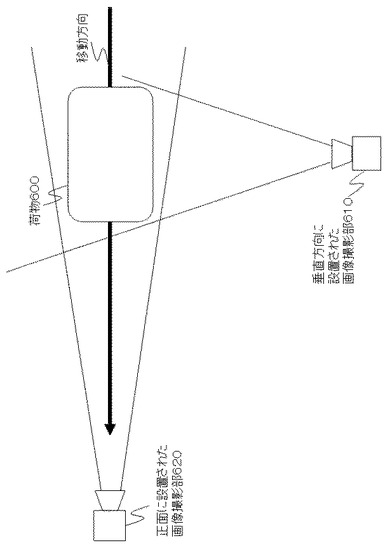
図1は、本実施形態における正面画像及び側面画像の定義について説明するための図である。図1は、荷物の移動の様子を上部から捉えた図である。図1において、矢印は荷物600の移動方向を表す。本実施形態においては、荷物600の移動方向に対して垂直な方向に設置された画像撮影部610で画像を撮影した場合の、当該撮影された画像を側面画像と定義する。また、荷物600の移動方向に対して正面に設置された画像撮影部620で画像を撮影した場合の、当該撮影された画像を正面画像と定義する。
【0024】
次に、図2を参考にして、本発明の第1実施形態に係る検品システム1000の機能構成を説明する。
【0025】
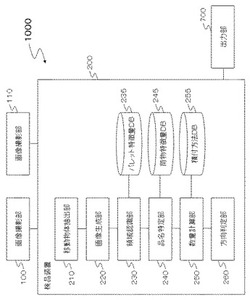
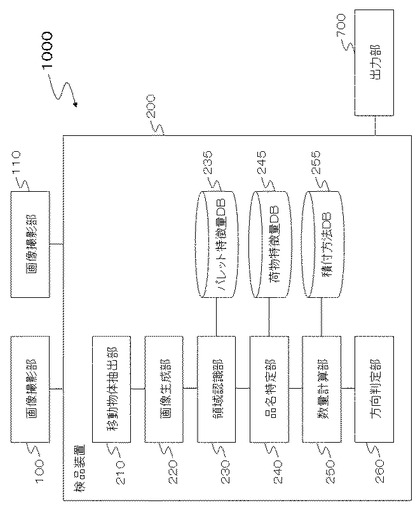
図2は、本発明の第1実施形態に係る検品システム1000の構成を示すブロック図である。図2に示すように検品システム1000は、検品対象である荷物を撮影する画像撮影部100及び画像撮影部110と、撮影した画像を解析して品名を特定し、数量を計算する検品装置200と、結果を出力する出力部700とを含む。
【0026】
画像撮影部100及び110は、画像を撮影する装置であり、一般的な監視カメラ等で良い。
【0027】
画像撮影部100及び110は、別々の方向から同一の荷物を撮影できるように調整された状態で、現場に固定される。画像撮影部100及び110は、必ずしも図1に示すように、荷物の移動方向に対して垂直方向及び正面方向に設置されている必要はない。画像撮影部100及び110は、移動する荷物を撮影可能な任意の位置に設置されていても良い。画像撮影部100及び110は、撮影した画像を画像情報として検品装置200に出力する。
【0028】
検品装置200は、画像撮影部100及び110から出力される画像情報を解析して、荷物の品名の特定及び数量の計算を行う。
【0029】
検品装置200は、移動物体抽出部210と、画像生成部220と、領域認識部230と、品名特定部240と、数量計算部250と、方向判定部260とを含む。また、検品装置200は、パレット特徴量DB235と、荷物特徴量DB245と、積付方法DB255とを含む(なお、DBはデータベースの略である。)。
【0030】
移動物体抽出部210は、予め画像情報として背景画像が設定されている。移動物体抽出部210は、画像撮影部100及び110から出力された撮影画像と、予め設定された背景画像との差分に基づいて、撮影画像中の移動物体領域を抽出する。具体的には、移動物体抽出部210は、出力された撮影画像と、予め設定された背景画像とを比較して、画像間の差分を取ることで、パレット及びパレット上に積み付けされた入荷される荷物や出荷される荷物の領域である、移動物体領域を抽出する。
【0031】
移動物体抽出部210は、画像撮影部100及び110から出力されたそれぞれの撮影画像から移動物体領域を抽出するので、結果として二つの移動物体領域が抽出される。
【0032】
移動物体抽出部210は、抽出した二つの移動物体領域の画像情報を画像生成部220に出力する。
【0033】
画像生成部220は、移動物体抽出部210から出力された二つの移動物体領域の画像から移動物体の立体形状を推定する。画像生成部220は、移動物体の立体形状の推定に、ステレオ視等の技術を利用しても良い。ステレオ視とは、異なる位置に配置された二つのカメラを用いて、それぞれの二次元画像上の対応する点の間で三角測量を行うことにより立体形状を推定する技術である。
【0034】
画像生成部220は、推定した立体形状を、画像撮影手段100及び110の設置条件に従って変換することで、あたかも移動方向に対して垂直の方向から移動物体を撮影したかのような、移動物体領域の側面画像を生成する。画像生成部220は、あたかも正面から移動物体を撮影したかのような正面画像を生成するように構成されても良い。本実施形態においては、画像生成部220は、移動物体領域の側面画像を生成するものとして説明する。
【0035】
画像生成部220は、生成した移動物体領域の側面画像の情報を領域認識部230に出力する。
【0036】
領域認識部230は、画像生成部220から出力された移動物体領域の側面画像に対し、パレット画像の特徴量でマッチングを行うことで、パレットの領域を認識する。パレットとは荷物を載せる台である。
【0037】
具体的には、領域認識部230は、画像生成部220から出力された側面画像の移動物体領域内で、パレット画像の大きさを変えながら特徴量のマッチング処理を繰り返し、パレット画像の特徴量が一致する領域を特定する。領域認識部230は、移動物体領域の側面画像の下部からマッチング処理を行っても良い。画像の下部からマッチング処理を行うことで、領域認識部230は、効率的にパレットの位置を特定することができる。
【0038】
一箇所でマッチングしたら、領域認識部230は、マッチングした領域の上部の領域で、さらにマッチング処理を繰り返しても良い。マッチング処理を繰り返すことにより、領域認識部230は、パレットだけを運んでいる場合と、パレットの上に荷物を載せている場合とを判別する。
【0039】
パレット画像の特徴量は、パレット特徴量DB235に格納されているものとする。パレット特徴量DB235は、パレットの側面画像の特徴量の情報を記憶している。また、パレット特徴量DB235は、パレットの正面画像の特徴量の情報を記憶していても良い。
【0040】
使用されるパレットは、必ずしも単一の形状及び色でなくても良い。領域認識部230は、記憶している特徴量のパレットと同一のパレットを認識するのみならず、特徴量の値にある程度の幅を持たせて、似ている形状及び色の物体をパレットとして認識しても良い。形状及び色が全く異なる複数のパレットを使用する場合には、パレット特徴量DB235は、使用するパレット毎に複数の特徴量を記憶していても良い。
【0041】
なお、荷物が載せられている対象は、必ずしもパレットである必要はない。ベルトコンベアのように一定の特徴を持ったものであれば、領域認識部230は荷物が載せられている対象を認識することが可能である。その場合、パレット特徴量DB235は、ベルトコンベアの特徴量を格納していれば良い。
【0042】
領域認識部230は、移動物体領域からパレット領域を除いた領域(移動物体領域におけるパレット領域の上部の領域)を、荷物が存在する可能性のある領域である荷物存在領域として認識する。領域認識部230は、認識した荷物存在領域の側面画像の画像情報を品名特定部240に出力する。
【0043】
品名特定部240は、荷物存在領域の側面画像に対し、荷物画像の特徴量でマッチングを行うことで荷物領域を特定し、荷物の品名を特定する。
【0044】
具体的には、品名特定部240は、側面画像の荷物存在領域内で、荷物画像の大きさを変えながら特徴量のマッチング処理を繰り返し、荷物画像の特徴量が一致する領域を特定する。
【0045】
品名特定部240は、一つの荷物領域を特定すると処理を中止しても良いし、特定可能な限り複数の荷物領域を特定しても良い。
【0046】
なお、本実施形態においては、パレットに積み付けされている荷物は一種類であり、複数の荷物が混載されておらず、各段には荷物がもれなく積まれていることを前提としている。荷物が一種類ではなく、段毎に荷物の種類及び積み付け方法が異なっていても良い。その場合には、品名特定部240は、段毎に複数の荷物画像の特徴量のマッチング処理を繰り返して、特徴量が一致する領域を特定しても良い。
【0047】
荷物画像の特徴量は、荷物特徴量DB245に格納されているものとする。荷物特徴量DB245は、荷物画像の特徴量として、梱包(ダンボール等)の表面画像の特徴量の情報を格納していても良い。荷物特徴量DB245は、品名毎の荷物の側面画像又は正面画像の特徴量を格納していても良い。荷物特徴量DB245は、梱包の正面又は側面の形状、模様若しくは色彩又はこれらの結合に関する情報を特徴量として格納していても良い。例えば、荷物画像の特徴量は、梱包の色彩の分布情報等でも良い。複数の荷物が混載されている場合には、荷物特徴量DB245は、それぞれの異なる荷物毎に荷物画像の特徴量を格納していても良い
また、荷物特徴量DB245は、荷物画像の特徴量と、荷物の品名とを関連付けて格納する。品名特定部240は、荷物画像の特徴量が一致すると、荷物特徴量DB245を参照して、該一致した特徴量と関連づけられている品名を、その荷物の品名であると特定する。
【0048】
品名特定部240は、荷物領域が特定された荷物存在領域を示す画像情報と、特定した荷物の品名を示す情報とを数量計算部250に出力する。
【0049】
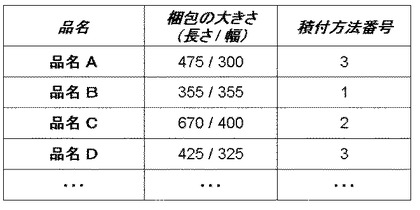
数量計算部250は、特定された品名に基づいて、荷物の積み付け方法を特定し、荷物存在領域及び特定した積み付け方法に基づいて荷物の数量を計算する。積付方法DB255は、品名毎の梱包の大きさを合わせて格納していても良い。
【0050】
まず、数量計算部250は、品名と、荷物の積み付け方法とを関連付けて格納する積付方法DB255を参照し、積み付け方法を特定する。次に数量計算部250は、積付方法DB255を参照し、特定した積み付け方法で積み付けた場合の一段辺りの荷物の個数を特定する。
【0051】
次に、数量計算部250は、マッチングした荷物画像の大きさ又は積付方法DB255が格納する梱包の大きさの情報を用いて、荷物存在領域における荷物の積まれた段数を特定する。または数量計算部250は、品名特定部240によって複数の荷物領域が特定された荷物存在領域の画像情報を参考にして、荷物が積まれた段数を特定しても良い。
【0052】
数量計算部250は、特定した一段辺りの荷物の個数と、荷物が積まれた段数とを乗算して、荷物の数量を計算する。
【0053】
別の方法として、数量計算部250は、画像生成部220が推定した移動物体の立体形状を用いて荷物の数量を計算しても良い。その場合、数量計算部250は、積付方法DB255を参照して特定した積付方法と、マッチングした荷物画像の大きさ及び梱包の大きさとから、立体形状の領域内における荷物の横並びの数及び段数を特定し、荷物の数量を計算しても良い。
【0054】
方向判定部260は、時刻tにおいて撮影された撮影画像中の移動物体領域と、時刻t+1において撮影された撮影画像中の移動物体領域との位置を比較して、移動物体が右方向に移動しているか左方向に移動しているかを判定する。方向判定部260は、移動物体が右方向に移動していると判定した場合は入荷、左方向に移動していると判定した場合は出荷、などの設定により入荷又は出荷の状況判断を行う。
【0055】
出力部700は、検品装置200にて特定された品名、計算された荷物の数量及び入荷又は出荷の状態を示す情報を出力する。
【0056】
出力部700は、ディスプレイのような表示装置であっても良いし、他の装置やシステムへ出力情報を送信する装置であっても良い。例えば、入荷検品や出荷検品の情報を管理するシステムと接続するためのコンピュータでも良い。
【0057】
次に、図3を参照して、本発明の第1実施形態の動作について説明する。
【0058】
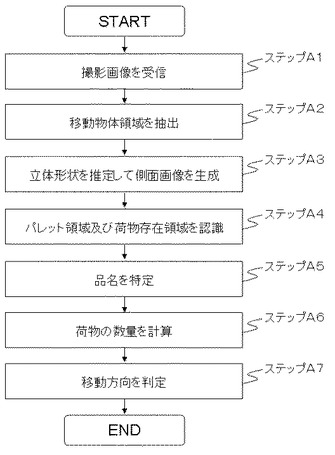
図3は、本発明の第1実施形態に係る検品システム1000の動作を示すフローチャート図である。図3に示すように、検品装置200は、画像撮影部100及び110から、撮影画像を受信する(ステップA1)。画像撮影部100及び110は、荷物の移動方向に対して、例えばそれぞれ右斜め上部と左斜め上部に設置されている。
【0059】
検品装置200が画像撮影部100及び110から撮影画像を受信すると、移動物体抽出部210は、それぞれの撮影画像に対して背景画像と差分を取る処理を行い、移動物体領域を抽出する(ステップA2)。移動物体抽出部210は、抽出した移動物体領域の画像情報を画像生成部220に出力する。
【0060】
画像生成部220は、画像撮影部100及び110のそれぞれの移動物体の見え方の違いから、移動物体の立体形状を推定し、移動物体領域の側面画像を生成する(ステップA3)。画像生成部220は、移動物体領域を画像撮影部100及び110の設置条件に従って変換することで、あたかも移動物体領域に存する移動物体を側面から撮影した側面画像を生成する。画像生成部220は、生成した移動物体領域の側面画像の画像情報を領域認識部230に出力する。
【0061】
領域認識部230は、移動物体抽出部210から画像情報が出力されると、移動物体領域の側面画像に対して、パレット画像の特徴量をマッチングさせてパレット領域を認識する(ステップA4)。パレット領域を認識すると、領域認識部230は、認識した領域の上部の領域に対してもパレット特徴量のマッチング処理を行う。上部領域でパレット特徴量がマッチングしない場合は、領域認識部230は、パレットに荷物が積み付けされていると判断し、当該上部領域を荷物存在領域であると認識する(ステップA4)。
【0062】
上部領域でもパレット特徴量がマッチングした場合は、領域認識部230は、マッチング処理を繰り返して、移動物体上にパレットのみが積載されているかどうかを判断する。全てパレットであった場合は、検品装置200における処理はそこで処理を終了する。
【0063】
パレット上部に荷物が積み付けされていると判断した場合、領域認識部230は、荷物が積み付けされている領域である荷物存在領域の画像情報を品名特定部240に出力する。
【0064】
品名特定部240は、荷物特徴量DB245から荷物画像の特徴量を取得し、荷物存在領域内においてマッチング処理を行う。マッチングした場合は、品名特定部240は、荷物特徴量DB245を参照して、該マッチングした荷物画像の特徴量に対応する品名を荷物の品名であると特定する(ステップA5)。
【0065】
品名特定部240は、一つの荷物領域を特定したら処理を終了しても良いし、特定可能な限り、荷物存在領域全体に対してマッチング処理を繰り返しても良い。その場合、品名特定部240は、既にマッチングした領域の横方向や縦方向に対して同一の大きさの荷物画像の特徴量のマッチング処理を行っても良い。
【0066】
荷物が複数段に積み付けされている場合、品名特定部240は、特定可能な限り複数段において荷物領域を特定することで、荷物の数量の計算の精度を高めても良い。複数の荷物領域(1つでも良い)が特定された後、品名特定部240は、荷物領域が特定された荷物存在領域の画像情報を数量計算部250へ出力する。
【0067】
数量計算部250は、品名特定部240により特定された荷物の品名から積付方法DB255に登録されている積み付け方法の情報を取得する。数量計算部250は、取得した積み付け方法及び荷物存在領域の画像情報に基づいて荷物の数量を計算する(ステップA6)。その際に、数量計算部250は、品名特定部240でマッチングした画像領域の大きさや、積付方法DB255が別途格納している梱包の大きさなどの情報を利用して、積み付けの段数や横並びの個数を特定して、荷物の数量を計算する態様にしても良い。
【0068】
方向判定部260は、移動物体抽出部210からの、移動物体領域が抽出された画像情報を時刻tと時刻t+1で比較して、移動物体の移動方向を推定する(ステップA7)。方向判定部260は、移動方向の推定処理を複数回実施して、推定精度を高めても良い。さらに、方向判定部260は、複数回実施後に、時刻tと時刻t+nの画像情報を比較して、移動方向の判定に誤りが無いかどうかを検証しても良い。
【0069】
方向判定部260は、判定した移動方向及び事前の設定から、移動物体が入荷又は出荷のどちらかの状態であるかを判定する。
【0070】
次に図4〜図9を参照して、図3の各ステップを、具体例を用いて説明する。
【0071】
図3のステップA2において、移動物体抽出部210は、撮影画像から移動物体領域を抽出し、ステップA3において画像生成部220は、移動物体領域の側面画像を生成する。
【0072】
図4は、抽出した移動物体領域300の側面画像のイメージ図である。ここで側面とは、図1において定義したように、荷物の移動方向に対して垂直な方向から見た移動物体の面である。
【0073】
図3のステップA4において、領域認識部230は、荷物存在領域内においてパレット領域及び荷物存在領域を認識する。
【0074】
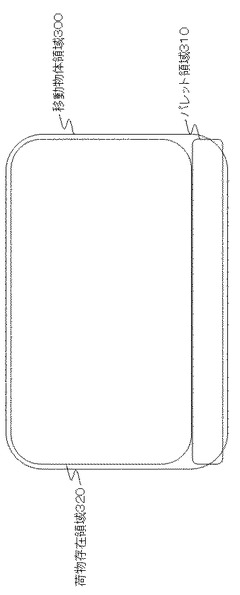
図5は、移動物体領域300の側面画像中におけるパレット領域310及び荷物存在領域320を現すイメージ図である。図5に示すように、領域認識部230は、パレット領域310を認識すると、その上部領域に対してパレット画像の特徴量のマッチング処理を繰り返し、マッチングしなかった場合は当該上部領域を荷物存在領域320として認識する。
【0075】
図3のステップA5において、品名特定部240は、品名の特定にあたり、まず荷物画像の特徴量のマッチング処理を行い、荷物領域を特定する。
【0076】
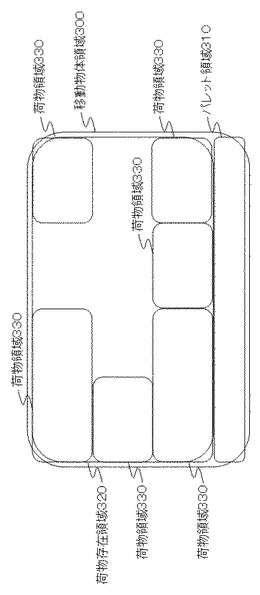
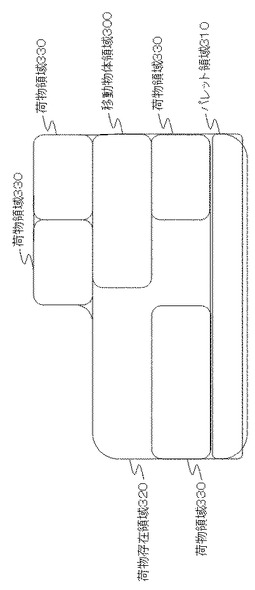
図6は、図5で示すイメージ図において、さらに特定した荷物領域330を現すイメージ図である。図6に示すように、品名特定部240は、特定可能な限り荷物画像の特徴量のマッチング処理を繰り返して、複数の荷物領域330を特定しても良い。図6においては、品名特定部240は、6個の荷物領域を特定している。6個の荷物領域のうち、2つが荷物の正面画像の特徴量とマッチングした画像であり、4つが側面画像の特徴量とマッチングした画像である。
【0077】
なお、図6において、移動物体領域300中に荷物領域330が特定されていない空白の領域が存在するが、当該領域には荷物が存在していない訳ではない。例えば荷物の梱包の汚れ等の原因により、単に特徴量がマッチングしなかっただけであり、実際には荷物が存在している。
【0078】
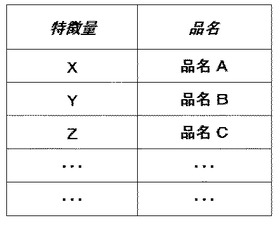
図7は、荷物特徴量DB245が格納する、荷物画像の特徴量と品名とを関連付けたデータの例である。図7に示すように、特徴量Xは品名Aと、特徴量Yは品名Bと、特徴量Zは品名Cとそれぞれ対応している。本実施形態においては、例えば特徴量Xがマッチングし、品名特定部240は、荷物の品名は品名Aであると特定する。
【0079】
図3のステップA6において、数量計算部250は荷物の数量を計算する。
【0080】
図8は、積付方法DB255が格納する、荷物の品名と、荷物の梱包の大きさと、荷物の積み付け方法の番号とを関連付けたデータの例である。図8に示すように、例えば品名Aは、梱包の大きさ「475 / 300」と、積み付け方法を示す番号である「3」と対応している。
【0081】
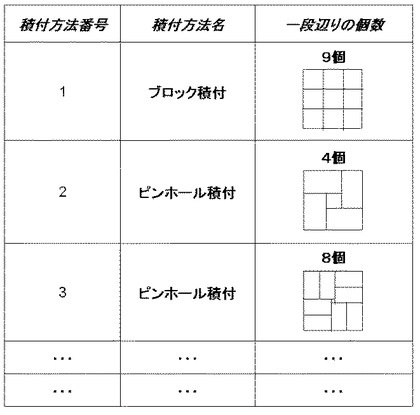
図9は、図8に加えて、積付方法DB255が格納する荷物の積み付けに関するデータの例である。図9で示すデータは、例えば積付方法番号「3」の場合、積み付け方法の名称が「ピンホール積み付け」であり、積み付けた場合の一段当たりの荷物の個数は「8個」であることを示す。
【0082】
図9では積み付け方法として「ブロック積み付け」及び「ピンホール積み付け」が記載されているが、他には例えば「レンガ積み付け」や「交互積み付け」等がある。積付方法DB255は、積み付けの方法や梱包の大きさに応じて異なる一段辺りの荷物の個数を記憶している。
【0083】
数量計算部250は、マッチングした荷物画像の大きさ又は積付方法DB255が格納する梱包の大きさの情報を用いる等の方法により、荷物存在領域における荷物の積まれた段数を特定する。数量計算部250は、特定した一段辺りの荷物の個数と、荷物が積まれた段数とを乗算して、荷物の数量を計算する。具体的には数量計算部250は、一段辺り8個の荷物が三段積まれており、荷物は計24個であると計算する。
【0084】
なお、積付方法DB255は、図8と図9とを結合した一つのデータを格納していても良い。また、上述の方法で荷物の数量を計算する場合には、積付方法DB255は、梱包の大きさのデータを保持していなくても良い。梱包の大きさのデータを保持している場合は、数量を計算する他の方法として、数量計算部250は、該データを用いて、例えば画像生成部220が推定した立体形状の情報に基づいて荷物の個数を計算しても良い。
【0085】
以上説明したように、第1実施形態に係る検品システム1000によれば、多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能となる。
【0086】
具体的には、第1実施形態に係る検品システム1000は、画像を活用することにより、荷物に対して何かを取り付けたり、取り外したりする必要がなく、また、人が装置を使用する必要も無いため、人的コスト及び金銭的コストが抑えられる。また、検品に必要な、品名と数量の2つの情報を、画像解析という一つの方法で取得することが可能となるため、装置の演算コストが最小限に抑えられる。
【0087】
また、第1実施形態に係る検品システム1000によれば、画像情報を記憶しておくことで、後から品名や数量のチェックが可能となる。
【0088】
<第2実施形態>
次に、本発明の第2実施形態に係る検品システム2000の機能構成を説明する。
【0089】
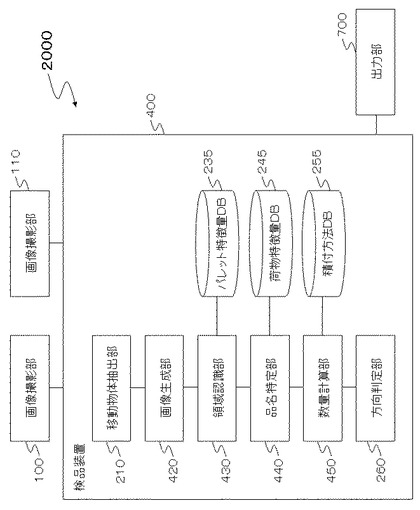
図10は、第2実施形態に係る検品システム2000の構成を示すブロック図である。図10に示すように、検品システム2000は、第1実施形態における検品システム1000と比較すると、検品装置200に代えて検品装置400を含む点で異なる。検品装置400は、検品装置200と比較すると、画像生成部220、領域認識部230、品名特定部240及び数量計算部250のそれぞれに代えて、画像生成部420、領域認識部430、品名特定部440及び数量計算部450を含む。
【0090】
画像生成部420、領域認識部430、品名特定部440及び数量計算部450は、それぞれ画像生成部220、領域認識部230、品名特定部240及び数量計算部250と同様の機能に加え、以下に説明する機能を有する。
【0091】
画像生成部420は、移動物体領域の側面画像の他に、移動物体領域について、推定した立体形状からさらに荷物の移動方向に対して正面から撮影された画像である正面画像を生成する。画像生成部420は、移動物体領域の側面画像の他に、生成した移動物体領域の正面画像の画像情報を領域認識部430に出力する。
【0092】
領域認識部430は、移動物体領域の側面画像における荷物存在領域を認識するだけでなく、さらに移動物体領域の正面画像における荷物存在領域を認識する。領域認識部430は、認識した2つの荷物存在領域の画像情報を、品名特定部440に出力する。
【0093】
品名特定部440は、2つの荷物存在領域のいずれか又は両方に対し荷物画像の特徴量をマッチングすることで品名を特定し、2つの荷物存在領域のそれぞれにおける複数の荷物領域を特定可能な限り特定する。品名特定部440は、複数の荷物領域が特定された2つの荷物存在領域の画像情報を、数量計算部450に出力する。
【0094】
数量計算部450は、複数の荷物領域が特定された2つの荷物存在領域と、特定した積み付け方法に基づいて荷物の数量を計算する。
【0095】
図11は、移動物体領域の正面画像において、荷物領域330を特定したイメージ図である。数量計算部450は、図6において示される移動物体領域の側面画像と、図11において示される移動物体領域の正面画像に基づいて荷物の数量を計算する。
【0096】
数量計算部450は、図6と図11とから、一部の荷物存在領域がかけていると判定し、図6及び図11の荷物存在領域の見え方及び荷物の積み付け方法等の情報から、荷物はそれぞれ一段目に8個、二段目に8個、三段目に4個の計20個であると計算する。
【0097】
以上説明したように、第2実施形態に係る検品システム2000によれば、荷物が積まれていない領域がある場合において正確に数量を計算することができる。
【0098】
なお、本実施形態においては、側面画像と正面画像の2つの画像を用いる態様としたが、これに限られず、様々な方向から撮影された複数の画像を用いて、より正確に数量を計算しても良い。
【0099】
<第3実施形態>
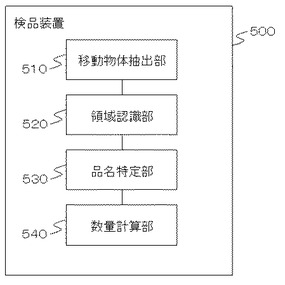
次に、図12を参照して本発明の第3実施形態である検品装置500の機能構成を説明する。
【0100】
図12は、検品装置500の構成を示すブロック図である。図12に示すように、検品装置500は、移動物体抽出部510と、領域認識部520と、品名特定部530と、数量計算部540とを含む。なお、これらは上述した移動物体抽出部210と、領域認識部230と、品名特定部240と、数量計算部250と同様の構成である。
【0101】
移動物体抽出部510は、撮影された画像である撮影画像と、予め設定された背景画像との差分に基づいて、前記撮影画像中の移動物体領域を抽出する。
【0102】
領域認識部520は、移動物体領域の側面画像に対し、パレット画像の特徴量でマッチングを行うことで認識したパレット領域を、移動物体領域から除いて荷物存在領域を認識する。
【0103】
品名特定部530は、荷物存在領域の側面画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定する。
【0104】
数量計算部540は、特定された品名に基づいて、荷物の積み付け方法を特定し、荷物存在領域及び特定した積み付け方法に基づいて荷物の数量を計算する。
【0105】
以上説明したように、検品装置500によれば、多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能となる。
【0106】
以上、各実施形態を参照して本発明を説明したが、本発明は以上の実施形態に限定されるものではない。本発明の構成や詳細には、本発明のスコープ内で同業者が理解し得る様々な変更をすることができる。
【0107】
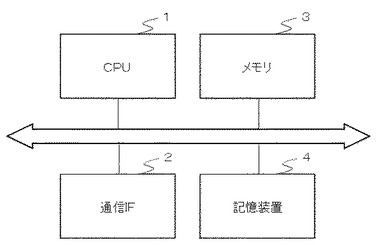
図13は、検品装置200のハードウェア構成の一例を示すブロック図である。
【0108】
図13に示すように、検品装置200を構成する各部は、CPU(Central Processing Unit)1と、ネットワーク接続用の通信IF2(通信インターフェース2)と、メモリ3と、プログラムを格納するハードディスク等の記憶装置4とを含む、コンピュータ装置によって実現される。ただし、検品装置200の構成は、図13に示すコンピュータ装置に限定されない。
【0109】
例えば、検品装置200は、通信IF2を介して外部から画像を受信しても良い。
【0110】
CPU1は、オペレーティングシステムを動作させて検品装置200の全体を制御する。また、CPU1は、例えばドライブ装置などに装着された記録媒体からメモリ3にプログラムやデータを読み出し、これにしたがって各種の処理を実行する。
【0111】
例えば移動物体抽出部210、画像生成部220、領域認識部230、品名特定部240、数量計算部250及び方向判定部260は、CPU1及びプログラムによって実現されても良い。
【0112】
記録装置4は、例えば光ディスク、フレキシブルディスク、磁気光ディスク、外付けハードディスク、半導体メモリ等であって、コンピュータプログラムをコンピュータ読み取り可能に記録する。コンピュータプログラムは、通信網に接続されている図示しない外部コンピュータからダウンロードされても良い。
【0113】
例えば、パレット特徴量DB235、荷物特徴量DB245及び積付方法DB255は、記録装置4によって実現されても良い。
【0114】
なお、これまでに説明した各実施形態において利用するブロック図は、ハードウェア単位の構成ではなく、機能単位のブロックを示している。これらの機能ブロックはハードウェア及びソフトウェアの任意の組み合わせによって実現される。また、検品装置200の構成部の実現手段は特に限定されない。すなわち、検品装置200は、物理的に結合した一つの装置により実現されても良いし、物理的に分離した二つ以上の装置を有線又は無線で接続し、これら複数の装置により実現されても良い。
【0115】
本発明のプログラムは、上記の各実施形態で説明した各動作を、コンピュータに実行させるプログラムであれば良い。
【産業上の利用可能性】
【0116】
本発明は、物流拠点や倉庫業、製造工場からの出荷業務などで適用可能である。
【符号の説明】
【0117】
1 CPU
2 通信IF
3 メモリ
4 記憶装置
100、110、610、620 画像撮影部
200、400、500 検品装置
210、510 移動物体抽出部
220、420 画像生成部
230、430、520 領域認識部
235 パレット特徴量DB
240、440、530 品名特定部
245 荷物特徴量DB
250、450、540 数量計算部
255 積付方法DB
260 方向判定部
700 出力部
1000、2000 検品システム
【技術分野】
【0001】
本発明は、荷降ろし又は積み込み作業時における入荷検品又は出荷検品を自動化する検品装置、検品方法及びプログラムに関する。
【背景技術】
【0002】
荷降ろしや荷物の積み込み作業時における検品作業を、人手によらずに自動化して行う技術が知られている。
【0003】
特許文献1には、特徴的な図柄を有する既知の対象物を、搬送中に検品するための画像処理検品装置が開示されている。特許文献1に記載の画像処理装置において、撮像手段は、検品対象物を撮影する。画像メモリは、撮影された画像データを取り込む。抽出手段は、該画像メモリ上の画像データから、検品対象物に含まれる特徴的な塊状図形を抽出する。特徴量測定手段は、該抽出された各塊状図形の特徴量を測定する。特徴量ヒストグラムパターン作成手段は、求めた特徴量の値の組み合わせにより検品対象物の特徴量ヒストグラムパターンを作成する。識別手段は、この作成した特徴量ヒストグラムパターンを用いて、検品対象物を識別する。
【0004】
特許文献1に記載の画像処理検品装置は、上記構成を採用することで、搬送系の影響によって検品対象物が回転や位置ずれを生じた場合でも、簡便な方法で、高い認識精度と高速性を保証する。
【0005】
また、特許文献2には、配送元での出荷検品作業に用いられる配送元端末と、配送先での入荷検品作業に用いられる配送先端末とからなり、配送する商品を収納する収納箱にRFIDタグを設けた入出荷検品システムが開示されている。特許文献2に記載の入出荷検品システムの配送元端末において、箱番号入力手段は、収納箱の箱番号を入力する。商品番号入力手段は、収納箱に収納する前記商品の商品番号および数量を入力する。配送データ書き込み手段は、箱番号入力手段によって入力された前記箱番号と前記商品番号入力手段によって入力された商品番号および数量とを配送データとしてRFIDタグに書き込む。ASNデータ作成手段は、箱番号入力手段によって入力された箱番号と商品番号入力手段によって入力された商品番号および数量とを少なくとも含むASNデータを作成する。ASNデータ送信手段は、ASNデータ作成手段によって作成されたASNデータを配送先端末に送信する。
【0006】
特許文献2に記載の入出荷検品システムは、上記構成を採用することで、収納箱に収納されている商品の詳細データをネットワーク上のホストコンピュータによって一元管理する必要をなくす等の効果を奏し、入荷検品作業の手間と時間とを削減する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平08−094335
【特許文献2】特開2006−103929
【発明の概要】
【発明が解決しようとする課題】
【0008】
検品作業は、(1)品名の特定、及び(2)数量の計算、という2つの作業から成り立っている。特許文献1に記載の画像処理検品装置によれば、撮影方向等の一定の条件を満たした画像を撮影できることを前提として、特徴量ヒストグラムパターンを用いて、検品対象物を識別することで品名を特定することができる。しかしながら該画像処理検品装置のみでは、品名を特定することはできても(2)の数量を計算する作業をすることができず、検品対象物の数量の計算は人手によらざるを得ない。
【0009】
特許文献2に記載の入出荷検品システムによれば、上記(1)及び(2)の作業を、人手によらずに自動化して行うことができる。しかしながら特許文献2に記載の入出荷検品システムを実施するためには、配送する多数の商品の収納箱にRFIDタグを取り付ける等の必要があるため、取り付け作業にかかる人的なコストや、RFIDタグ自体の金銭的なコスト等、多くのコストがかかる。
【0010】
以上より、本発明の目的は、多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能な技術を提供することである。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明における検品装置は、撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定する品名特定手段と、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する数量計算手段と、を含む。
【0012】
また、上記目的を達成するため、本発明における検品システムは、画像を撮影する一又は二以上の画像撮影手段と、検品装置と、前記検品装置において特定した荷物の品名と、計算した荷物の数量を出力する出力手段と、を含む。
【0013】
また、上記目的を達成するため、本発明における検品方法は、撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する。
【0014】
また、上記目的を達成するため、本発明におけるプログラムは、撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する、処理をコンピュータに実行させる。
【発明の効果】
【0015】
本発明によれば、多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能となる。
【図面の簡単な説明】
【0016】
【図1】正面画像及び側面画像の定義について説明するための図である。
【図2】本発明の第1実施形態に係る検品システム1000の構成を示すブロック図である。
【図3】本発明の第1実施形態に係る検品システム1000の動作を示すフローチャート図である。
【図4】抽出した移動物体領域300の側面画像のイメージ図である。
【図5】移動物体領域300の側面画像中におけるパレット領域310及び荷物存在領域320を現すイメージ図である。
【図6】図5で示すイメージ図において、さらに特定した荷物領域330を現すイメージ図である。
【図7】荷物特徴量DB245が格納する、荷物画像の特徴量と品名とを関連付けたデータの例である。
【図8】積付方法DB255が格納する、荷物の品名と、荷物の梱包の大きさと、荷物の積み付け方法の番号とを関連付けたデータの例である。
【図9】図8に加えて、積付方法DB255が格納する荷物の積み付けに関するデータの例である。
【図10】第2実施形態に係る検品システム2000の構成を示すブロック図である。
【図11】移動物体領域の正面画像において、荷物領域330を特定したイメージ図である。
【図12】検品装置500の構成を示すブロック図である。
【図13】検品装置200のハードウェア構成の一例を示すブロック図である。
【発明を実施するための形態】
【0017】
<第1実施形態>
まず、本発明の実施形態の理解を容易にするために、本発明の背景を詳細に説明する。
【0018】
検品作業は、(1)品名の特定、(2)数量の計算、という2つの作業から成り立っている。(1)又は(2)の作業に関連する技術が多数存在する。例えば、品名を特定する技術として、画像認識技術や、バーコードリーダ又はRFIDタグを用いた技術等が存在する。また、数量を計算する技術として、RFIDタグを用いた技術や、重量検知の技術等が存在する。特許文献2に記載のように、RFIDタグは、(1)及び(2)の作業に利用することができるが、現実の運用では、RFIDタグの取り付け及び取り外しの作業にかかる人的なコストが問題になる。また、RFIDタグ自体や読取アンテナの設置工事等にかかる金銭的なコストが多額であり、問題となっていた。
【0019】
コストを抑えるために、画像認識技術の活用を考えた場合、撮影方向等の一定の条件を満たした画像、例えば正面から撮影した画像を用いることができれば、品名を特定することはできる。しかしながら、検品作業を行う現場の環境によっては、必ずしも条件の良い画像が撮影できるとは限らない。また、検品作業を行う現場によっては、撮影距離が一定に保てず、画像上の検品対象物の大きさが変動することから、正確な数量を計算することができない。
【0020】
上述の課題は、特許文献1又は特許文献2によっても解決することができない。
【0021】
以下に説明される本発明の第1実施形態によれば、多くのコストをかけることなく、検品作業を人手によらずに自動化して行うことが可能となる。
【0022】
まず、図1を用いて、本実施形態における正面画像及び側面画像の定義について説明する。
【0023】
図1は、本実施形態における正面画像及び側面画像の定義について説明するための図である。図1は、荷物の移動の様子を上部から捉えた図である。図1において、矢印は荷物600の移動方向を表す。本実施形態においては、荷物600の移動方向に対して垂直な方向に設置された画像撮影部610で画像を撮影した場合の、当該撮影された画像を側面画像と定義する。また、荷物600の移動方向に対して正面に設置された画像撮影部620で画像を撮影した場合の、当該撮影された画像を正面画像と定義する。
【0024】
次に、図2を参考にして、本発明の第1実施形態に係る検品システム1000の機能構成を説明する。
【0025】
図2は、本発明の第1実施形態に係る検品システム1000の構成を示すブロック図である。図2に示すように検品システム1000は、検品対象である荷物を撮影する画像撮影部100及び画像撮影部110と、撮影した画像を解析して品名を特定し、数量を計算する検品装置200と、結果を出力する出力部700とを含む。
【0026】
画像撮影部100及び110は、画像を撮影する装置であり、一般的な監視カメラ等で良い。
【0027】
画像撮影部100及び110は、別々の方向から同一の荷物を撮影できるように調整された状態で、現場に固定される。画像撮影部100及び110は、必ずしも図1に示すように、荷物の移動方向に対して垂直方向及び正面方向に設置されている必要はない。画像撮影部100及び110は、移動する荷物を撮影可能な任意の位置に設置されていても良い。画像撮影部100及び110は、撮影した画像を画像情報として検品装置200に出力する。
【0028】
検品装置200は、画像撮影部100及び110から出力される画像情報を解析して、荷物の品名の特定及び数量の計算を行う。
【0029】
検品装置200は、移動物体抽出部210と、画像生成部220と、領域認識部230と、品名特定部240と、数量計算部250と、方向判定部260とを含む。また、検品装置200は、パレット特徴量DB235と、荷物特徴量DB245と、積付方法DB255とを含む(なお、DBはデータベースの略である。)。
【0030】
移動物体抽出部210は、予め画像情報として背景画像が設定されている。移動物体抽出部210は、画像撮影部100及び110から出力された撮影画像と、予め設定された背景画像との差分に基づいて、撮影画像中の移動物体領域を抽出する。具体的には、移動物体抽出部210は、出力された撮影画像と、予め設定された背景画像とを比較して、画像間の差分を取ることで、パレット及びパレット上に積み付けされた入荷される荷物や出荷される荷物の領域である、移動物体領域を抽出する。
【0031】
移動物体抽出部210は、画像撮影部100及び110から出力されたそれぞれの撮影画像から移動物体領域を抽出するので、結果として二つの移動物体領域が抽出される。
【0032】
移動物体抽出部210は、抽出した二つの移動物体領域の画像情報を画像生成部220に出力する。
【0033】
画像生成部220は、移動物体抽出部210から出力された二つの移動物体領域の画像から移動物体の立体形状を推定する。画像生成部220は、移動物体の立体形状の推定に、ステレオ視等の技術を利用しても良い。ステレオ視とは、異なる位置に配置された二つのカメラを用いて、それぞれの二次元画像上の対応する点の間で三角測量を行うことにより立体形状を推定する技術である。
【0034】
画像生成部220は、推定した立体形状を、画像撮影手段100及び110の設置条件に従って変換することで、あたかも移動方向に対して垂直の方向から移動物体を撮影したかのような、移動物体領域の側面画像を生成する。画像生成部220は、あたかも正面から移動物体を撮影したかのような正面画像を生成するように構成されても良い。本実施形態においては、画像生成部220は、移動物体領域の側面画像を生成するものとして説明する。
【0035】
画像生成部220は、生成した移動物体領域の側面画像の情報を領域認識部230に出力する。
【0036】
領域認識部230は、画像生成部220から出力された移動物体領域の側面画像に対し、パレット画像の特徴量でマッチングを行うことで、パレットの領域を認識する。パレットとは荷物を載せる台である。
【0037】
具体的には、領域認識部230は、画像生成部220から出力された側面画像の移動物体領域内で、パレット画像の大きさを変えながら特徴量のマッチング処理を繰り返し、パレット画像の特徴量が一致する領域を特定する。領域認識部230は、移動物体領域の側面画像の下部からマッチング処理を行っても良い。画像の下部からマッチング処理を行うことで、領域認識部230は、効率的にパレットの位置を特定することができる。
【0038】
一箇所でマッチングしたら、領域認識部230は、マッチングした領域の上部の領域で、さらにマッチング処理を繰り返しても良い。マッチング処理を繰り返すことにより、領域認識部230は、パレットだけを運んでいる場合と、パレットの上に荷物を載せている場合とを判別する。
【0039】
パレット画像の特徴量は、パレット特徴量DB235に格納されているものとする。パレット特徴量DB235は、パレットの側面画像の特徴量の情報を記憶している。また、パレット特徴量DB235は、パレットの正面画像の特徴量の情報を記憶していても良い。
【0040】
使用されるパレットは、必ずしも単一の形状及び色でなくても良い。領域認識部230は、記憶している特徴量のパレットと同一のパレットを認識するのみならず、特徴量の値にある程度の幅を持たせて、似ている形状及び色の物体をパレットとして認識しても良い。形状及び色が全く異なる複数のパレットを使用する場合には、パレット特徴量DB235は、使用するパレット毎に複数の特徴量を記憶していても良い。
【0041】
なお、荷物が載せられている対象は、必ずしもパレットである必要はない。ベルトコンベアのように一定の特徴を持ったものであれば、領域認識部230は荷物が載せられている対象を認識することが可能である。その場合、パレット特徴量DB235は、ベルトコンベアの特徴量を格納していれば良い。
【0042】
領域認識部230は、移動物体領域からパレット領域を除いた領域(移動物体領域におけるパレット領域の上部の領域)を、荷物が存在する可能性のある領域である荷物存在領域として認識する。領域認識部230は、認識した荷物存在領域の側面画像の画像情報を品名特定部240に出力する。
【0043】
品名特定部240は、荷物存在領域の側面画像に対し、荷物画像の特徴量でマッチングを行うことで荷物領域を特定し、荷物の品名を特定する。
【0044】
具体的には、品名特定部240は、側面画像の荷物存在領域内で、荷物画像の大きさを変えながら特徴量のマッチング処理を繰り返し、荷物画像の特徴量が一致する領域を特定する。
【0045】
品名特定部240は、一つの荷物領域を特定すると処理を中止しても良いし、特定可能な限り複数の荷物領域を特定しても良い。
【0046】
なお、本実施形態においては、パレットに積み付けされている荷物は一種類であり、複数の荷物が混載されておらず、各段には荷物がもれなく積まれていることを前提としている。荷物が一種類ではなく、段毎に荷物の種類及び積み付け方法が異なっていても良い。その場合には、品名特定部240は、段毎に複数の荷物画像の特徴量のマッチング処理を繰り返して、特徴量が一致する領域を特定しても良い。
【0047】
荷物画像の特徴量は、荷物特徴量DB245に格納されているものとする。荷物特徴量DB245は、荷物画像の特徴量として、梱包(ダンボール等)の表面画像の特徴量の情報を格納していても良い。荷物特徴量DB245は、品名毎の荷物の側面画像又は正面画像の特徴量を格納していても良い。荷物特徴量DB245は、梱包の正面又は側面の形状、模様若しくは色彩又はこれらの結合に関する情報を特徴量として格納していても良い。例えば、荷物画像の特徴量は、梱包の色彩の分布情報等でも良い。複数の荷物が混載されている場合には、荷物特徴量DB245は、それぞれの異なる荷物毎に荷物画像の特徴量を格納していても良い
また、荷物特徴量DB245は、荷物画像の特徴量と、荷物の品名とを関連付けて格納する。品名特定部240は、荷物画像の特徴量が一致すると、荷物特徴量DB245を参照して、該一致した特徴量と関連づけられている品名を、その荷物の品名であると特定する。
【0048】
品名特定部240は、荷物領域が特定された荷物存在領域を示す画像情報と、特定した荷物の品名を示す情報とを数量計算部250に出力する。
【0049】
数量計算部250は、特定された品名に基づいて、荷物の積み付け方法を特定し、荷物存在領域及び特定した積み付け方法に基づいて荷物の数量を計算する。積付方法DB255は、品名毎の梱包の大きさを合わせて格納していても良い。
【0050】
まず、数量計算部250は、品名と、荷物の積み付け方法とを関連付けて格納する積付方法DB255を参照し、積み付け方法を特定する。次に数量計算部250は、積付方法DB255を参照し、特定した積み付け方法で積み付けた場合の一段辺りの荷物の個数を特定する。
【0051】
次に、数量計算部250は、マッチングした荷物画像の大きさ又は積付方法DB255が格納する梱包の大きさの情報を用いて、荷物存在領域における荷物の積まれた段数を特定する。または数量計算部250は、品名特定部240によって複数の荷物領域が特定された荷物存在領域の画像情報を参考にして、荷物が積まれた段数を特定しても良い。
【0052】
数量計算部250は、特定した一段辺りの荷物の個数と、荷物が積まれた段数とを乗算して、荷物の数量を計算する。
【0053】
別の方法として、数量計算部250は、画像生成部220が推定した移動物体の立体形状を用いて荷物の数量を計算しても良い。その場合、数量計算部250は、積付方法DB255を参照して特定した積付方法と、マッチングした荷物画像の大きさ及び梱包の大きさとから、立体形状の領域内における荷物の横並びの数及び段数を特定し、荷物の数量を計算しても良い。
【0054】
方向判定部260は、時刻tにおいて撮影された撮影画像中の移動物体領域と、時刻t+1において撮影された撮影画像中の移動物体領域との位置を比較して、移動物体が右方向に移動しているか左方向に移動しているかを判定する。方向判定部260は、移動物体が右方向に移動していると判定した場合は入荷、左方向に移動していると判定した場合は出荷、などの設定により入荷又は出荷の状況判断を行う。
【0055】
出力部700は、検品装置200にて特定された品名、計算された荷物の数量及び入荷又は出荷の状態を示す情報を出力する。
【0056】
出力部700は、ディスプレイのような表示装置であっても良いし、他の装置やシステムへ出力情報を送信する装置であっても良い。例えば、入荷検品や出荷検品の情報を管理するシステムと接続するためのコンピュータでも良い。
【0057】
次に、図3を参照して、本発明の第1実施形態の動作について説明する。
【0058】
図3は、本発明の第1実施形態に係る検品システム1000の動作を示すフローチャート図である。図3に示すように、検品装置200は、画像撮影部100及び110から、撮影画像を受信する(ステップA1)。画像撮影部100及び110は、荷物の移動方向に対して、例えばそれぞれ右斜め上部と左斜め上部に設置されている。
【0059】
検品装置200が画像撮影部100及び110から撮影画像を受信すると、移動物体抽出部210は、それぞれの撮影画像に対して背景画像と差分を取る処理を行い、移動物体領域を抽出する(ステップA2)。移動物体抽出部210は、抽出した移動物体領域の画像情報を画像生成部220に出力する。
【0060】
画像生成部220は、画像撮影部100及び110のそれぞれの移動物体の見え方の違いから、移動物体の立体形状を推定し、移動物体領域の側面画像を生成する(ステップA3)。画像生成部220は、移動物体領域を画像撮影部100及び110の設置条件に従って変換することで、あたかも移動物体領域に存する移動物体を側面から撮影した側面画像を生成する。画像生成部220は、生成した移動物体領域の側面画像の画像情報を領域認識部230に出力する。
【0061】
領域認識部230は、移動物体抽出部210から画像情報が出力されると、移動物体領域の側面画像に対して、パレット画像の特徴量をマッチングさせてパレット領域を認識する(ステップA4)。パレット領域を認識すると、領域認識部230は、認識した領域の上部の領域に対してもパレット特徴量のマッチング処理を行う。上部領域でパレット特徴量がマッチングしない場合は、領域認識部230は、パレットに荷物が積み付けされていると判断し、当該上部領域を荷物存在領域であると認識する(ステップA4)。
【0062】
上部領域でもパレット特徴量がマッチングした場合は、領域認識部230は、マッチング処理を繰り返して、移動物体上にパレットのみが積載されているかどうかを判断する。全てパレットであった場合は、検品装置200における処理はそこで処理を終了する。
【0063】
パレット上部に荷物が積み付けされていると判断した場合、領域認識部230は、荷物が積み付けされている領域である荷物存在領域の画像情報を品名特定部240に出力する。
【0064】
品名特定部240は、荷物特徴量DB245から荷物画像の特徴量を取得し、荷物存在領域内においてマッチング処理を行う。マッチングした場合は、品名特定部240は、荷物特徴量DB245を参照して、該マッチングした荷物画像の特徴量に対応する品名を荷物の品名であると特定する(ステップA5)。
【0065】
品名特定部240は、一つの荷物領域を特定したら処理を終了しても良いし、特定可能な限り、荷物存在領域全体に対してマッチング処理を繰り返しても良い。その場合、品名特定部240は、既にマッチングした領域の横方向や縦方向に対して同一の大きさの荷物画像の特徴量のマッチング処理を行っても良い。
【0066】
荷物が複数段に積み付けされている場合、品名特定部240は、特定可能な限り複数段において荷物領域を特定することで、荷物の数量の計算の精度を高めても良い。複数の荷物領域(1つでも良い)が特定された後、品名特定部240は、荷物領域が特定された荷物存在領域の画像情報を数量計算部250へ出力する。
【0067】
数量計算部250は、品名特定部240により特定された荷物の品名から積付方法DB255に登録されている積み付け方法の情報を取得する。数量計算部250は、取得した積み付け方法及び荷物存在領域の画像情報に基づいて荷物の数量を計算する(ステップA6)。その際に、数量計算部250は、品名特定部240でマッチングした画像領域の大きさや、積付方法DB255が別途格納している梱包の大きさなどの情報を利用して、積み付けの段数や横並びの個数を特定して、荷物の数量を計算する態様にしても良い。
【0068】
方向判定部260は、移動物体抽出部210からの、移動物体領域が抽出された画像情報を時刻tと時刻t+1で比較して、移動物体の移動方向を推定する(ステップA7)。方向判定部260は、移動方向の推定処理を複数回実施して、推定精度を高めても良い。さらに、方向判定部260は、複数回実施後に、時刻tと時刻t+nの画像情報を比較して、移動方向の判定に誤りが無いかどうかを検証しても良い。
【0069】
方向判定部260は、判定した移動方向及び事前の設定から、移動物体が入荷又は出荷のどちらかの状態であるかを判定する。
【0070】
次に図4〜図9を参照して、図3の各ステップを、具体例を用いて説明する。
【0071】
図3のステップA2において、移動物体抽出部210は、撮影画像から移動物体領域を抽出し、ステップA3において画像生成部220は、移動物体領域の側面画像を生成する。
【0072】
図4は、抽出した移動物体領域300の側面画像のイメージ図である。ここで側面とは、図1において定義したように、荷物の移動方向に対して垂直な方向から見た移動物体の面である。
【0073】
図3のステップA4において、領域認識部230は、荷物存在領域内においてパレット領域及び荷物存在領域を認識する。
【0074】
図5は、移動物体領域300の側面画像中におけるパレット領域310及び荷物存在領域320を現すイメージ図である。図5に示すように、領域認識部230は、パレット領域310を認識すると、その上部領域に対してパレット画像の特徴量のマッチング処理を繰り返し、マッチングしなかった場合は当該上部領域を荷物存在領域320として認識する。
【0075】
図3のステップA5において、品名特定部240は、品名の特定にあたり、まず荷物画像の特徴量のマッチング処理を行い、荷物領域を特定する。
【0076】
図6は、図5で示すイメージ図において、さらに特定した荷物領域330を現すイメージ図である。図6に示すように、品名特定部240は、特定可能な限り荷物画像の特徴量のマッチング処理を繰り返して、複数の荷物領域330を特定しても良い。図6においては、品名特定部240は、6個の荷物領域を特定している。6個の荷物領域のうち、2つが荷物の正面画像の特徴量とマッチングした画像であり、4つが側面画像の特徴量とマッチングした画像である。
【0077】
なお、図6において、移動物体領域300中に荷物領域330が特定されていない空白の領域が存在するが、当該領域には荷物が存在していない訳ではない。例えば荷物の梱包の汚れ等の原因により、単に特徴量がマッチングしなかっただけであり、実際には荷物が存在している。
【0078】
図7は、荷物特徴量DB245が格納する、荷物画像の特徴量と品名とを関連付けたデータの例である。図7に示すように、特徴量Xは品名Aと、特徴量Yは品名Bと、特徴量Zは品名Cとそれぞれ対応している。本実施形態においては、例えば特徴量Xがマッチングし、品名特定部240は、荷物の品名は品名Aであると特定する。
【0079】
図3のステップA6において、数量計算部250は荷物の数量を計算する。
【0080】
図8は、積付方法DB255が格納する、荷物の品名と、荷物の梱包の大きさと、荷物の積み付け方法の番号とを関連付けたデータの例である。図8に示すように、例えば品名Aは、梱包の大きさ「475 / 300」と、積み付け方法を示す番号である「3」と対応している。
【0081】
図9は、図8に加えて、積付方法DB255が格納する荷物の積み付けに関するデータの例である。図9で示すデータは、例えば積付方法番号「3」の場合、積み付け方法の名称が「ピンホール積み付け」であり、積み付けた場合の一段当たりの荷物の個数は「8個」であることを示す。
【0082】
図9では積み付け方法として「ブロック積み付け」及び「ピンホール積み付け」が記載されているが、他には例えば「レンガ積み付け」や「交互積み付け」等がある。積付方法DB255は、積み付けの方法や梱包の大きさに応じて異なる一段辺りの荷物の個数を記憶している。
【0083】
数量計算部250は、マッチングした荷物画像の大きさ又は積付方法DB255が格納する梱包の大きさの情報を用いる等の方法により、荷物存在領域における荷物の積まれた段数を特定する。数量計算部250は、特定した一段辺りの荷物の個数と、荷物が積まれた段数とを乗算して、荷物の数量を計算する。具体的には数量計算部250は、一段辺り8個の荷物が三段積まれており、荷物は計24個であると計算する。
【0084】
なお、積付方法DB255は、図8と図9とを結合した一つのデータを格納していても良い。また、上述の方法で荷物の数量を計算する場合には、積付方法DB255は、梱包の大きさのデータを保持していなくても良い。梱包の大きさのデータを保持している場合は、数量を計算する他の方法として、数量計算部250は、該データを用いて、例えば画像生成部220が推定した立体形状の情報に基づいて荷物の個数を計算しても良い。
【0085】
以上説明したように、第1実施形態に係る検品システム1000によれば、多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能となる。
【0086】
具体的には、第1実施形態に係る検品システム1000は、画像を活用することにより、荷物に対して何かを取り付けたり、取り外したりする必要がなく、また、人が装置を使用する必要も無いため、人的コスト及び金銭的コストが抑えられる。また、検品に必要な、品名と数量の2つの情報を、画像解析という一つの方法で取得することが可能となるため、装置の演算コストが最小限に抑えられる。
【0087】
また、第1実施形態に係る検品システム1000によれば、画像情報を記憶しておくことで、後から品名や数量のチェックが可能となる。
【0088】
<第2実施形態>
次に、本発明の第2実施形態に係る検品システム2000の機能構成を説明する。
【0089】
図10は、第2実施形態に係る検品システム2000の構成を示すブロック図である。図10に示すように、検品システム2000は、第1実施形態における検品システム1000と比較すると、検品装置200に代えて検品装置400を含む点で異なる。検品装置400は、検品装置200と比較すると、画像生成部220、領域認識部230、品名特定部240及び数量計算部250のそれぞれに代えて、画像生成部420、領域認識部430、品名特定部440及び数量計算部450を含む。
【0090】
画像生成部420、領域認識部430、品名特定部440及び数量計算部450は、それぞれ画像生成部220、領域認識部230、品名特定部240及び数量計算部250と同様の機能に加え、以下に説明する機能を有する。
【0091】
画像生成部420は、移動物体領域の側面画像の他に、移動物体領域について、推定した立体形状からさらに荷物の移動方向に対して正面から撮影された画像である正面画像を生成する。画像生成部420は、移動物体領域の側面画像の他に、生成した移動物体領域の正面画像の画像情報を領域認識部430に出力する。
【0092】
領域認識部430は、移動物体領域の側面画像における荷物存在領域を認識するだけでなく、さらに移動物体領域の正面画像における荷物存在領域を認識する。領域認識部430は、認識した2つの荷物存在領域の画像情報を、品名特定部440に出力する。
【0093】
品名特定部440は、2つの荷物存在領域のいずれか又は両方に対し荷物画像の特徴量をマッチングすることで品名を特定し、2つの荷物存在領域のそれぞれにおける複数の荷物領域を特定可能な限り特定する。品名特定部440は、複数の荷物領域が特定された2つの荷物存在領域の画像情報を、数量計算部450に出力する。
【0094】
数量計算部450は、複数の荷物領域が特定された2つの荷物存在領域と、特定した積み付け方法に基づいて荷物の数量を計算する。
【0095】
図11は、移動物体領域の正面画像において、荷物領域330を特定したイメージ図である。数量計算部450は、図6において示される移動物体領域の側面画像と、図11において示される移動物体領域の正面画像に基づいて荷物の数量を計算する。
【0096】
数量計算部450は、図6と図11とから、一部の荷物存在領域がかけていると判定し、図6及び図11の荷物存在領域の見え方及び荷物の積み付け方法等の情報から、荷物はそれぞれ一段目に8個、二段目に8個、三段目に4個の計20個であると計算する。
【0097】
以上説明したように、第2実施形態に係る検品システム2000によれば、荷物が積まれていない領域がある場合において正確に数量を計算することができる。
【0098】
なお、本実施形態においては、側面画像と正面画像の2つの画像を用いる態様としたが、これに限られず、様々な方向から撮影された複数の画像を用いて、より正確に数量を計算しても良い。
【0099】
<第3実施形態>
次に、図12を参照して本発明の第3実施形態である検品装置500の機能構成を説明する。
【0100】
図12は、検品装置500の構成を示すブロック図である。図12に示すように、検品装置500は、移動物体抽出部510と、領域認識部520と、品名特定部530と、数量計算部540とを含む。なお、これらは上述した移動物体抽出部210と、領域認識部230と、品名特定部240と、数量計算部250と同様の構成である。
【0101】
移動物体抽出部510は、撮影された画像である撮影画像と、予め設定された背景画像との差分に基づいて、前記撮影画像中の移動物体領域を抽出する。
【0102】
領域認識部520は、移動物体領域の側面画像に対し、パレット画像の特徴量でマッチングを行うことで認識したパレット領域を、移動物体領域から除いて荷物存在領域を認識する。
【0103】
品名特定部530は、荷物存在領域の側面画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定する。
【0104】
数量計算部540は、特定された品名に基づいて、荷物の積み付け方法を特定し、荷物存在領域及び特定した積み付け方法に基づいて荷物の数量を計算する。
【0105】
以上説明したように、検品装置500によれば、多くのコストをかけることなく、(1)品名の特定、及び(2)数量の計算、の2つの作業を人手によらずに自動化して行うことが可能となる。
【0106】
以上、各実施形態を参照して本発明を説明したが、本発明は以上の実施形態に限定されるものではない。本発明の構成や詳細には、本発明のスコープ内で同業者が理解し得る様々な変更をすることができる。
【0107】
図13は、検品装置200のハードウェア構成の一例を示すブロック図である。
【0108】
図13に示すように、検品装置200を構成する各部は、CPU(Central Processing Unit)1と、ネットワーク接続用の通信IF2(通信インターフェース2)と、メモリ3と、プログラムを格納するハードディスク等の記憶装置4とを含む、コンピュータ装置によって実現される。ただし、検品装置200の構成は、図13に示すコンピュータ装置に限定されない。
【0109】
例えば、検品装置200は、通信IF2を介して外部から画像を受信しても良い。
【0110】
CPU1は、オペレーティングシステムを動作させて検品装置200の全体を制御する。また、CPU1は、例えばドライブ装置などに装着された記録媒体からメモリ3にプログラムやデータを読み出し、これにしたがって各種の処理を実行する。
【0111】
例えば移動物体抽出部210、画像生成部220、領域認識部230、品名特定部240、数量計算部250及び方向判定部260は、CPU1及びプログラムによって実現されても良い。
【0112】
記録装置4は、例えば光ディスク、フレキシブルディスク、磁気光ディスク、外付けハードディスク、半導体メモリ等であって、コンピュータプログラムをコンピュータ読み取り可能に記録する。コンピュータプログラムは、通信網に接続されている図示しない外部コンピュータからダウンロードされても良い。
【0113】
例えば、パレット特徴量DB235、荷物特徴量DB245及び積付方法DB255は、記録装置4によって実現されても良い。
【0114】
なお、これまでに説明した各実施形態において利用するブロック図は、ハードウェア単位の構成ではなく、機能単位のブロックを示している。これらの機能ブロックはハードウェア及びソフトウェアの任意の組み合わせによって実現される。また、検品装置200の構成部の実現手段は特に限定されない。すなわち、検品装置200は、物理的に結合した一つの装置により実現されても良いし、物理的に分離した二つ以上の装置を有線又は無線で接続し、これら複数の装置により実現されても良い。
【0115】
本発明のプログラムは、上記の各実施形態で説明した各動作を、コンピュータに実行させるプログラムであれば良い。
【産業上の利用可能性】
【0116】
本発明は、物流拠点や倉庫業、製造工場からの出荷業務などで適用可能である。
【符号の説明】
【0117】
1 CPU
2 通信IF
3 メモリ
4 記憶装置
100、110、610、620 画像撮影部
200、400、500 検品装置
210、510 移動物体抽出部
220、420 画像生成部
230、430、520 領域認識部
235 パレット特徴量DB
240、440、530 品名特定部
245 荷物特徴量DB
250、450、540 数量計算部
255 積付方法DB
260 方向判定部
700 出力部
1000、2000 検品システム
【特許請求の範囲】
【請求項1】
撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定する品名特定手段と、
前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する数量計算手段と、
を含む検品装置。
【請求項2】
撮影された画像である撮影画像と、予め設定された背景画像との差分に基づいて、前記撮影画像中の移動物体領域を抽出する移動物体抽出手段と、
前記移動物体領域の側面画像に対し、パレット画像の特徴量でマッチングを行うことで認識したパレット領域を、前記移動物体領域から除いて荷物存在領域を認識する領域認識手段と、
をさらに含み、
前記品名特定手段は、前記荷物存在領域の側面画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、
前記数量計算手段は、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記荷物存在領域及び前記特定した積み付け方法に基づいて荷物の数量を計算する、
請求項1に記載の検品装置。
【請求項3】
前記移動物体抽出手段は、様々な方向に設置された複数の画像撮影手段によって撮影された画像のそれぞれから、複数の移動物体領域を抽出する手段であって、
前記複数の移動物体領域の画像から移動物体の立体形状を推定し、当該立体形状から、前記複数の画像撮影手段の設置条件に基づいて前記移動物体領域の側面画像を生成する画像生成手段と、
をさらに含む請求項1又は2に記載の検品装置。
【請求項4】
前記パレット画像の特徴量を格納するパレット特徴量DBと、
前記荷物画像の特徴量と、荷物の品名とを関連付けて格納する荷物特徴量DBと、
前記品名と、前記荷物の積み付け方法とを関連付けて記憶する積付方法DBと、
をさらに含む請求項1〜3のいずれか一項に記載の検品装置。
【請求項5】
前記画像生成手段は、前記移動物体領域の側面画像の他に、前記移動物体領域について、前記立体形状からさらに荷物の移動方向に対して正面から撮影された画像である正面画像を生成し、
前記領域認識手段は、前記移動物体領域の側面画像における荷物存在領域を認識するだけでなく、さらに前記移動物体領域の正面画像における荷物存在領域を認識し、
前記数量計算手段は、前記側面画像における荷物存在領域、前記正面画像における荷物存在領域及び前記特定した積み付け方法に基づいて荷物の数量を計算する、
請求項3又は4に記載の検品装置。
【請求項6】
前記画像生成手段は、前記移動物体領域に関して様々な方向から撮影した複数の画像を生成し、
前記領域認識手段は、前記複数の移動物体領域の画像のそれぞれから荷物存在領域を認識し、
前記数量計算手段は、前記複数の荷物存在領域及び前記特定した積み付け方法に基づいて、荷物の数量を計算する、
請求項3〜5のいずれか一項に記載の検品装置。
【請求項7】
前記撮影画像中の移動物体領域と、当該撮影画像の撮影時間から一定時間経過した後の撮影画像中の移動物体領域との位置を比較して、荷物の移動方向を判定する方向判定手段と、
をさらに含む請求項2〜6のいずれか一項に記載の検品装置。
【請求項8】
画像を撮影する一又は二以上の画像撮影手段と、
請求項1〜7のいずれか一項に記載の検品装置と、
前記検品装置において特定した荷物の品名と、計算した荷物の数量を出力する出力手段と、
を含む検品システム。
【請求項9】
撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、
前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する、
検品方法。
【請求項10】
撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、
前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する、
処理をコンピュータに実行させるプログラム。
【請求項1】
撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定する品名特定手段と、
前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する数量計算手段と、
を含む検品装置。
【請求項2】
撮影された画像である撮影画像と、予め設定された背景画像との差分に基づいて、前記撮影画像中の移動物体領域を抽出する移動物体抽出手段と、
前記移動物体領域の側面画像に対し、パレット画像の特徴量でマッチングを行うことで認識したパレット領域を、前記移動物体領域から除いて荷物存在領域を認識する領域認識手段と、
をさらに含み、
前記品名特定手段は、前記荷物存在領域の側面画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、
前記数量計算手段は、前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記荷物存在領域及び前記特定した積み付け方法に基づいて荷物の数量を計算する、
請求項1に記載の検品装置。
【請求項3】
前記移動物体抽出手段は、様々な方向に設置された複数の画像撮影手段によって撮影された画像のそれぞれから、複数の移動物体領域を抽出する手段であって、
前記複数の移動物体領域の画像から移動物体の立体形状を推定し、当該立体形状から、前記複数の画像撮影手段の設置条件に基づいて前記移動物体領域の側面画像を生成する画像生成手段と、
をさらに含む請求項1又は2に記載の検品装置。
【請求項4】
前記パレット画像の特徴量を格納するパレット特徴量DBと、
前記荷物画像の特徴量と、荷物の品名とを関連付けて格納する荷物特徴量DBと、
前記品名と、前記荷物の積み付け方法とを関連付けて記憶する積付方法DBと、
をさらに含む請求項1〜3のいずれか一項に記載の検品装置。
【請求項5】
前記画像生成手段は、前記移動物体領域の側面画像の他に、前記移動物体領域について、前記立体形状からさらに荷物の移動方向に対して正面から撮影された画像である正面画像を生成し、
前記領域認識手段は、前記移動物体領域の側面画像における荷物存在領域を認識するだけでなく、さらに前記移動物体領域の正面画像における荷物存在領域を認識し、
前記数量計算手段は、前記側面画像における荷物存在領域、前記正面画像における荷物存在領域及び前記特定した積み付け方法に基づいて荷物の数量を計算する、
請求項3又は4に記載の検品装置。
【請求項6】
前記画像生成手段は、前記移動物体領域に関して様々な方向から撮影した複数の画像を生成し、
前記領域認識手段は、前記複数の移動物体領域の画像のそれぞれから荷物存在領域を認識し、
前記数量計算手段は、前記複数の荷物存在領域及び前記特定した積み付け方法に基づいて、荷物の数量を計算する、
請求項3〜5のいずれか一項に記載の検品装置。
【請求項7】
前記撮影画像中の移動物体領域と、当該撮影画像の撮影時間から一定時間経過した後の撮影画像中の移動物体領域との位置を比較して、荷物の移動方向を判定する方向判定手段と、
をさらに含む請求項2〜6のいずれか一項に記載の検品装置。
【請求項8】
画像を撮影する一又は二以上の画像撮影手段と、
請求項1〜7のいずれか一項に記載の検品装置と、
前記検品装置において特定した荷物の品名と、計算した荷物の数量を出力する出力手段と、
を含む検品システム。
【請求項9】
撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、
前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する、
検品方法。
【請求項10】
撮影された画像である撮影画像に対し、荷物画像の特徴量でマッチングを行うことで荷物の品名を特定し、
前記特定された品名に基づいて、荷物の積み付け方法を特定し、前記特定した積み付け方法に基づいて荷物の数量を計算する、
処理をコンピュータに実行させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−67499(P2013−67499A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−208263(P2011−208263)
【出願日】平成23年9月23日(2011.9.23)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月23日(2011.9.23)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]